uncertainty management with imprecise knowledge with application to design
TRANSCRIPT
Journal of Automated Reasoning 9: 217-230, 1992. 217 �9 1992 Kluwer Academic Publishers. Printed in the Netherlands.
Uncertainty Management with Imprecise Knowledge with Application to Design D O N A L D E. B R O W N and W E N D Y J. M A R K E R T Institute for Parallel Computation and Department of Systems Engineering, University of Firgmia, Charlottesville. VA 22901, 804-924-5393, U.S.A. Bitnet: deb(a~ virgmia.edu
(Received: 14 February 1991)
Abstract. Uncertainty management is critical to the effective use of knowledge-based systems m a wide variety of domains. Design is typical of these domains in that the implementation of a design in an artifact, the future environment for the artifact, and the component characteristics of the artifact are all uncertain. Existing probabilistic schemes to address the inherent uncertainty in areas like design assume precise knowledge of the probabilities of relevant events. This paper defines a probabilistic method for uncertainty management with imprecise inputs. The approach combines Bayesian inference networks and information theoretic inference procedures. The resulting scheme manages both imprecision and uncertainty in the problem domain. An application of the approach to materiel design is described.
Key words. Bayesian inference, uncertainty management, probabilistic networks, relative entropy.
1. Introduction
Many practical problems contain uncertain and imprecise information. Design is typical of this class of problems, because decisions must be made without the benefit of complete or categorical knowledge. Designers are frequently unsure of the per- formance or operational characteristics of the implementations (artifacts) of their designs. This uncertainty derives from the novelty of a design and interactions between components that have never before been combined according to the specifi- cations of the design. A designer also lacks precise knowledge of the artifact's ultimate operational environment.
There is a vast literature concerning decision making under uncertainty with particular emphasis on the paradigm of decision analysis (Lindley, 1971). Much of this work is directly applicable to selection problems in design. More recently, however, concern has focused on the more unstructured aspects of design, such as configuration, that are less amenable to the techniques of decision analysis. Knowledge- based systems, which are more descriptive of very good human performance, provide a vehicle for addressing these unstructured problems.
Despite the recency of knowledge-based systems, there is already a large and growing literature on the treatment of uncertain information within these systems (see, for example, Kanal and Lemer (1986), Spiegelhalter (1986)). However, much of this work fails to effectively capture the combination of uncertainty and imprecision found in a number of practical situations such as design. This paper defines a
218 DONALD E. BROWN AND WENDY J. MARKERT
probabilistic method for uncertainty management with imprecise inputs. The approach was created for specific design problems, and these are the focus of the applications discussed here. However, the approach seems to have applicability beyond just the design domain. The next section briefly reviews existing approaches to uncertainty management. Section 3 provides details on inference networks as a means of uncer- tainty management, and Section 4 describes an information theoretic approach to imprecision in inference networks. An application of our uncertainty management procedure to materiel design for the U.S. Army is in Section 5 and conclusions are in Section 6.
2. Uncertainty Management
The growth of knowledge-based systems as a practical approach to computer-assisted problem solving has necessitated the development of procedures to process uncertain and imprecise information. There are a variety of ways to categorize this work, but a particularly convenient view is to classify the uncertainty management approaches as either quantitative or symbolic.
An example of the symbolic approach is the endorsement model used in the rule-based expert system SOLOMON (Cohen, 1985). Endorsements are objects used to represent belief or disbelief in a proposition or hypothesis. Positive endorse- ments represent the evidence in favor of believing an hypothesis, while negative endorsements represent evidence favoring disbelief. New evidence is classified into one of these categories for the hypothesis to which it is attached. Hypotheses are ranked by summing weights that correspond to strengths of belief or disbelief in each endorsement.
Symbolic approaches seem appropriate for problems in which the uncertainty is difficult to measure numerically. However, the approach lacks both a theoretical framework and formal representations for uncertainty. These deficiencies limit vali- dation and interpretation of the results.
Quantitative approaches are the most common form of uncertainty management. Differences between quantitative approaches are due to alternative representations for uncertainty and imprecision, and the corresponding methods for manipulating these representations. There are roughly four representations commonly used in quantitative uncertainty management - certainty factors, probability theory, belief functions, and fuzzy sets.
Certainty factors were used to represent uncertainty in an early diagnostic expert system, MYCIN (Buchanan and Shortliffe, 1984). The approach is still found in many commercial expert systems shells, although it has all but disappeared from the research literature because of the strong assumptions associated with its formal implementation (Heckerman, 1985).
Probabilistic approaches to uncertainty management rely primarily on Bayes' rule to reason with uncertain information represented as probabilities. An example of the approach, which also treats problems with inconsistencies in subjective assessments
UNCERTAIN MANAGEMENT WITH IMPRECISE KNOWLEDGE 219
of probabilities, is in Duda et al. (1976). The requirement to successively apply Bayes' rule to support hierarchical reasoning was explored in Barclay (1977). Pearl and his associates (Kim and Pearl, 1987; Pearl, 1988) have developed methods for updating probabilities in networks or hierarchical inference structures. These methods are an important advance and serve as the basis for the uncertainty management scheme described in Section 3.
Not all probabilistic methods are based entirely on Bayes' rule. When weaker forms of information are present (e.g. constraints on a posterior rather than a likelihood function) then information-theoretic procedures seem appropriate. Examples of this approach are in Markert (1990), Brown and Duren (1986), Cheeseman (1983).
The innovative work by Cheeseman is of particular relevance to the approach discussed here. Cheeseman used a maximum entropy formulation to calculate the conditional probability of any multi-valued predicate given evidence of a particular case. He specifically considered equality constraints on the desired conditional probability derived from other conditional probability statements and joint prob- abilities. This work is of importance for expert systems, but does not address imprecise information as formulated here. Additionally, Cheeseman relies on existing axiomatic justifications for the maximum entropy principle, while we use the principle of minimum relative entropy (allowing for prior distributions) and show a maximum likelihood justification for its use.
An approach which abandons a strictly Bayesian framework is the theory of belief functions (Shafer, 1976). This theory offers a quantitative approach that starts with basic probabilities and then builds a more general structure. Within the framework of belief functions, different representations of ignorance are possible. The theory has computational difficulties although Sharer and Logan (1987) provide mechanisms for applying the method to knowledge-based systems.
While probabilistic methods capture measures of uncertainty, fuzzy sets have been proposed as a vehicle for representing imprecision. Discussions of the applicability of this approach to possibility theory and artificial intelligence are in Zadeh (1978).
In order to select from among the above approaches to uncertainty management, a knowledge engineer must carefully consider key features of the problem domain. There are two requirements for selection of an uncertainty management scheme that appear to be applicable across a variety of domains in general, and to design in particular. The first requirement is that the uncertainty management scheme must be capable of manipulating hierarchically organized knowledge. In design, there is a natural decomposition of knowledge around systems, subsystems, and components. Frequently, there is a decomposition of the operational environment, as well, into finer levels of spatial detail. By hierarchically organized knowledge we mean that knowledge is decomposed around either the systems and subsystems in the design or the operational environment (cf. Pearl, 1988). A second requirement is the capability to handle imprecision in the specification of uncertain knowledge. By this we are simply recognizing the difficulty frequently found in practice of obtaining precise values for probabilities. Designers, for instance, engage in a highly speculative and
220 DONALD E. BROWN AND WENDY J. MARKERT
creative process in which they attempt to view the synergistic interaction of a variety of systems under a variety of conditions. It may not be realistic for them to provide point values for probabilistic events that have never been observed and have little or no historical precedent.
The uncertainty management scheme we developed attempts to account for both of these requirements. Hierarchical knowledge and the associated updating scheme are handled by inference networks and Pearl's local updating, as described in the next section. Imprecision in knowledge acquisition is treated by information theoretic methods described in Section 4.
3. Inference Networks
Uncertain and hierarchically organized knowledge can be represented in inference networks. In these structures evidence and hypotheses are represented as nodes, and the causal relationships between them are represented as arcs connecting the nodes. Because our primary concern is with domains, like design, in which knowledge is hierarchical, we will only consider inference networks that are connected, acyclic graphs. Additionally, the arcs connecting the nodes are directional, and show depend- ency between evidence and hypothetical events. Similarly, the absence of an arc indicates conditional independence between events. This section describes these infer- ence networks and the updating scheme devised by Pearl, which we use in our uncertainty management system.
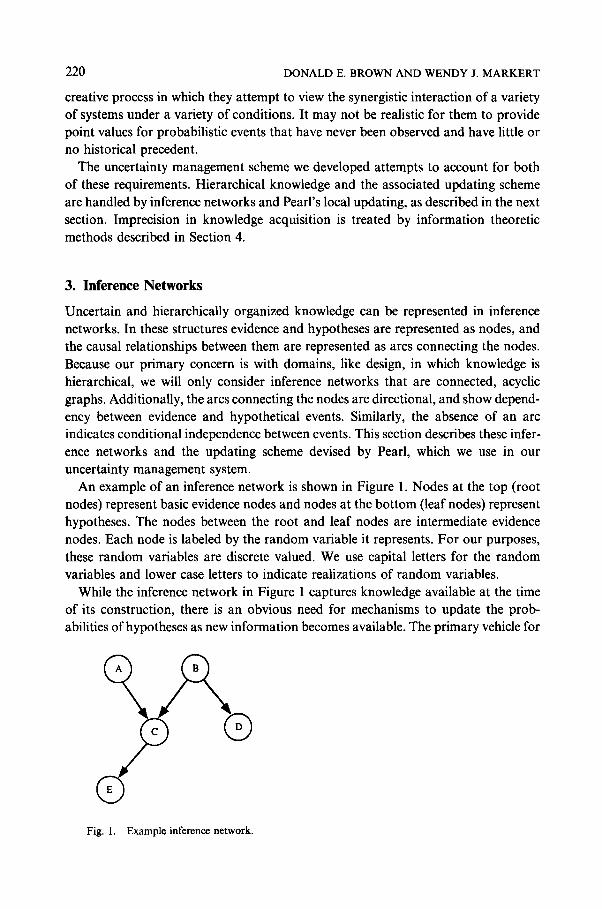
An example of an inference network is shown in Figure I. Nodes at the top (root nodes) represent basic evidence nodes and nodes at the bottom (leaf nodes) represent hypotheses. The nodes between the root and leaf nodes are intermediate evidence nodes. Each node is labeled by the random variable it represents. For our purposes, these random variables are discrete valued. We use capital letters for the random variables and lower case letters to indicate realizations of random variables.
While the inference network in Figure 1 captures knowledge available at the time of its construction, there is an obvious need for mechanisms to update the prob- abilities of hypotheses as new information becomes available. The primary vehicle for
Fig. 1. Example inference network.
UNCERTAIN MANAGEMENT WITH IMPRECISE KNOWLEDGE
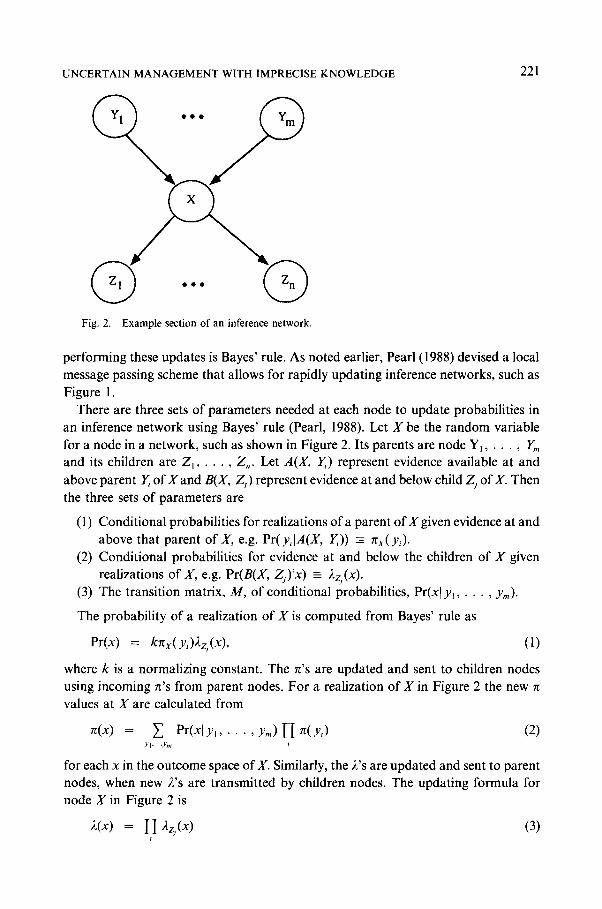
Fig. 2. Example section of an inference network.
221
performing these updates is Bayes' rule. As noted earlier, Pearl (1988) devised a local message passing scheme that allows for rapidly updating inference networks, such as Figure 1.
There are three sets of parameters needed at each node to update probabilities in an inference network using Bayes' rule (Pearl, 1988). Let X be the random variable for a node in a network, such as shown in Figure 2. Its parents are node Y~, . . . , Y,, and its children are Zl . . . . . Z,. Let A(X, Y,) represent evidence available at and above parent Y, o f X a n d B(X, Zj) represent evidence at and below child Zj of X. Then the three sets of parameters are
(1) Conditional probabilities for realizations of a parent of Xgiven evidence at and above that parent of)( , e.g. Pr(y, IA(X, Y,)) = Irx(Yi).
(2) Conditional probabilities for evidence at and below the children of X given realizations of X, e.g. Pr(B(X, Zj)[x) = 2zj(x).
(3) The transition matrix, M, of conditional probabilities, Pr(xl y~ . . . . , Ym).
The probability of a realization of X is computed from Bayes' rule as
Pr(x) = k~x(y,)2zj(X), (1)
where k is a normalizing constant. The n's are updated and sent to children nodes using incoming n's from parent nodes. For a realization of X in Figure 2 the new values at A" are calculated from
re(x) = ~ Pr(xly, . . . . . Y,.) 1--[ re(y,) (2) )'1, ,Ym l
for each x in the outcome space of X. Similarly, the 2's are updated and sent to parent nodes, when new 2's are transmitted by children nodes. The updating formula for node X in Figure 2 is
~(x) = 1-I,lzj(x) (3) l
222 DONALD E. BROWN AND WENDY J. MARKERT
for each x in the outcome space of X. Boundary conditions and message passing for this updating scheme are in Pearl (1988).
In design-aiding systems, nodes in an inference network typically represent com- ponent characteristics, environmental conditions, and performance attributes. For example, root nodes might indicate different environmental conditions, evidence nodes might show the effects of these conditions on components and subsystems, and the leaf nodes might be hypotheses regarding the performance of the complete system. Prior information about the environment enters the network with the 7r values at the root nodes. Similarly, testing information enters the network at the leaves through the 2 values. As the designer learns more about both the design and its future environment, the new information is transmitted through the network according to Equations (1)-(3).
4. An Imprecision Management Procedure for Inference Networks
The inference network approach described in the previous section provides a frame- work for reasoning under uncertainty, especially with hierarchically organized know- ledge. However, as noted in Section 2, many problem domains are also characterized by imprecision in the available knowledge. As an example, a designer might not know the precise probabilistic relationship between an environmental state and the behavior of a component. Hence, exact specification of the transition matrix at a node is not possible. Similarly, specifying the exact probability for a future environmental con- dition is often difficult, which precludes acquisition of it values. In short, the inference network approach is employable only with precisely known probabilistic information, and this is often unavailable.
This section describes a procedure for using imprecisely specified probabilistic information in inference networks. The procedure has at its foundation an informa- tion theoretic approach to inference. This approach is justified because it produces asymptotic maximum likelihood estimates for the imprecisely specified probabilities and then uses them to obtain maximum likelihood probabilities in the inference network. Imprecision is treated through statements that are very close to natural language in structure. With this procedure, a user can always apply an inference network to manage uncertain knowledge, despite the imprecision. By also adding assumptions regarding the family of densities for the imprecisely specified parameters, density estimates for these parameters can be found.
Information theory provides a formal basis for measuring uncertainty. For the problem of imprecisely specified parameters in an inference network, the uncertainty surrounds the exact values for these parameters. While it is possible to directly describe this uncertainty by probability measures on the parameters, this would require new assessments of the knowledge source to acquire these measures. Again there might be imprecision in the assessment, and the system builder would be required to proceed to yet another level of probabilistic abstraction without a guaran- tee of closure. Instead of forcing a probability measure to describe the imprecision,
UNCERTAIN MANAGEMENT WITH IMPRECISE KNOWLEDGE 223
information theoretic approaches use only the available information and principles of inference to derive the required probabilities. There are two key features to this approach--the representation of the imprecise information and the principles of inference.
Imprecise probabilistic information is represented in our procedure by set inclu- sion, which can then be manipulated by information theoretic inference techniques. Set inclusion, as the name implies, defines sets or regions for the parameters of interest. Hence, rather than providing a point estimate for a parameter, the knowledge source provides a set of values which are certain to include the parameter. This representation of imprecision is amenable to expression in natural language state- ments. For example,
"The operational environment is at least four times more likely to include salt spay than blowing sand";
"Given that the operational environment includes blowing sand, vehicle failure due to clogged air filters is three times as likely as failure due to clogged fuel filters"; and
"The expected number of starts until vehicle failure under - 10~ conditions with no preventive maintainenace is 4."
Each of these statements constrains relevant parameters, but does not provide exact values. For instance, the first statement produces a constraint of the form Pr{salt spray} > 4Pr{blowing sand}. In this manner, natural language statements, that imprecisely specify the probabilities in the inference network, are converted into constraints on these probabilities. In general, the constraints can be of arbitrary form, as long as they are consistent. However, for computational reasons, only linear forms are allowed. This restriction seldom poses practical problems, because most expressions of imprecision are linear in the desired probabilities (e.g. bounds and moments).
With imprecise probabilistic information conveniently represented through set inclusion, the next problem is to use this representation for inference. The principle of minimum relative entropy from information theory is appropriate for this purpose. In particular, it provides the mechanism for updating probabilities based on new information. Let p be the probability distribution to be estimated, and p' be a prior estimate, p is used here to represent any one of the imprecisely specified parameters in an inference network. As such, p can be one of the r~'s, 2's and rows in M at any node in the network. Also let A be the permissible values of p according to the set inclusion representation of imprecise information. Then the principle of minimum relative entropy prescribes using the estimate/~, where
/~ = arg max ~ p(x) In p(x____)) p'(x)
subject to p(x) E A, ~ p(x) = 1. (4) X

224 DONALD E. BROWN AND WENDY J. MARKERT
p' is assumed to be uniform, if not otherwise specified. Other choices as the default for p' can be used in this procedure. The specific use of a uniform prior is justified as the minimum relative entropy solution given no prior and only the normalizing constraint. It is also interesting to note that (4) with a uniform prior is equivalent to a maximum entropy formulation, thus exposing the relationship between the princi- ples of minimum relative entropy and maximum entropy.
An axiomatic justification for this principle of inference is in Shore and Johnson (1981). A second justification is in Brown and Smith (1990) and shows that the solution to (4) is the most likely outcome in a experiment according to p' under the constraints A. A formal statement of this results is in the following lemma.
LEMMA 1. Let A, defined by set inclusion, be a closed and convex subset of
S = { p : ~ p ( x ) = 1;p(x)~> 0Vx}.
Let p' ~ S and r/(x, n) be the empirical frequency for outcome x in n independent trials o f an experiment with underlying probability distribution p'. Then for ~ defined in (4), and for all e > 0,
lim Pr{[~/(x, n) -/~1 >/ e such that r/(x, n) ~ A}.
The proof of this result is in Brown and Smith (1990). The principle of minimum relative entropy and its justification in Lemma 1 provide
the inference mechanism for handling imprecision in probabilistic specifications. However, the application of this principle to inference networks requires an additional step. In particular, it must be shown that the network updating procedures preserve the maximum likelihood justification of the lemma.
Again let p represent an imprecisely specified probability distribution in the infer- ence network. Let q~ be a probability distribution at a node adjacent to the one containing q, such that through the updating Equations (1)-(3), q~ -- f ( p , r~ ). The r~ represents the set of additional parameters that might be used to compute q~ in the updating equations. In an analogous fashion, q~ can represent a row in M. Similarly, let qc be a probability distribution at a node connected to the one containing p, such that through the updating equations (1)-(3), qc = f (P , rc). rc is the set of additional parameters used to determine qc. If p is estimated using the principle of minimum relative entropy, then the next result shows that parameters at other nodes estimated by the updating equations with p maintain the asymptotic maximum likelihood justification of Lemma 1.
THEOREM 2. Let p' and r/(x, n) be as defined in Lemma 1. Let ~qc ( y' n) be the empirical frequency for outcome y in the outcome space of qc after n trials in the outcome space of p according to p'. Then for ~ defined in (4) and for all e > 0,
!irn Pr{lrlqc(y, n) - f ( ~ , rc)] >~ ~ such that r/(x, n) E A}. (5)
Proof. The proof is by induction on the nodes. For the adjacent node containing P, ~]ql ( y ' n) = f(~(X, n), rl). Hence, (5) follows for ql by Lemma 1. In an identical
UNCERTAIN M A N A G E M E N T WITH IMPRECISE K N O W L E D G E 225
fashion, (5) holds for qc, since it holds for its adjacent node by the induction hypothesis. []
Theorem 2 establishes the fact that, despite imprecise specifications for parameters in an inference network, it is always possible to use relative entropy minimization to obtain estimates for required probabilities. However, these estimates are without confidence statements because they are based on asymptotic arguments. With some additional analysis, it is possible to obtain distributions for the imprecisely specified parameters in the inference network.
Again, let p be the probability distribution with imprecise specifications represented by the set A. Now the solution to the mathematical program in (4) provides the most likely value (or more precisely, the asymptotic maximum likelihood value) for a realization x in the outcome space ofp. The minimum value for p(x), Prom (X), is readily found as the solution to the linear program (when linear constraints defined A),
Max ~ p ( y ) ,~,~ (6)
Subject to p e A.
Similarly, the maximum value for p(x), Pmax (X), is the solution to the linear program
Min ~ p ( y ) , ,x (7)
Subject to p E A.
A convenient and commonly used distribution for binomial probabilities is the beta distribution. The beta distribution includes a wide array of unimodal shapes. If it is assumed that each p(x) is beta distributed with minimum, maximum, and most likely values determined as the solution to the mathematical programs in (6), (7), and (4), respectively, then the complete distribution for p can be obtained. Specifically,
E[p(x)] ~ - {Prnln(X) + Pmax(X) + ~(X)}I6 and E[p(x)] = o~xlo~ - o~ x,
where e = Zx e~. Thus, the density function for p is Dirichlet,
_ I'(~X) xifl p(x)~ _ i. U(P) 1] F(c~) x
With this distribution for p, we can find the distributions for other parameters in the inference network through conditioning arguments and application of the updating Equations (1)-(3).
5. Application to Materiel Design
The uncertainty management procedure described in the previous section can be applied to a number of problem domains. As noted in Section 1, there are problems in configuration design for which it is particularly appropriate. This section illustrates the applicability of the procedure for U.S. Army materiel design.
226 DONALD E. BROWN AND WENDY J. MARKERT
Materiel design consists of the selection and configuration of materials in equip- ment based on operational characteristics of the equipment, environmental conditions, and material properties. The U.S. Army in particular is interested in providing design aids to materiel designers that ensure appropriate environmental conditions are correctly considered in this selection and configuration process. In materiel design, as in many other design problems, uncertainty surrounds the actual operational environ- ment for the equipment and the performance of the equipment and its components in the environment. Material performance is measured by attributes, such as, strength, toughness, and hardness. The performance of materials is conditional on environmental conditions. For example, the toughness of a material depends on the temperature of the environment (Van Vlack, 1973). Reliability, availablility and cost are exemplary attributes for equipment performance and depend on environmental conditions through the performance of the components.
An inference network with precisely specified parameters can determine the prob- able performance characteristics of different designs. Under more typical conditions, the parameters are not precisely known, and then the procedure in the previous section is appropriate. Nodes in the inference network represent both environmental conditions and performance. They are connected to show the effects of the environ- ment on performance, and this information is stored in the transition matrices (M) at each node. The n and 2 values represent the probabilities of conditions and characteristics given the available evidence. As new information is acquired, the network probabilities are updated to provide current estimates for performance and environmental conditions.
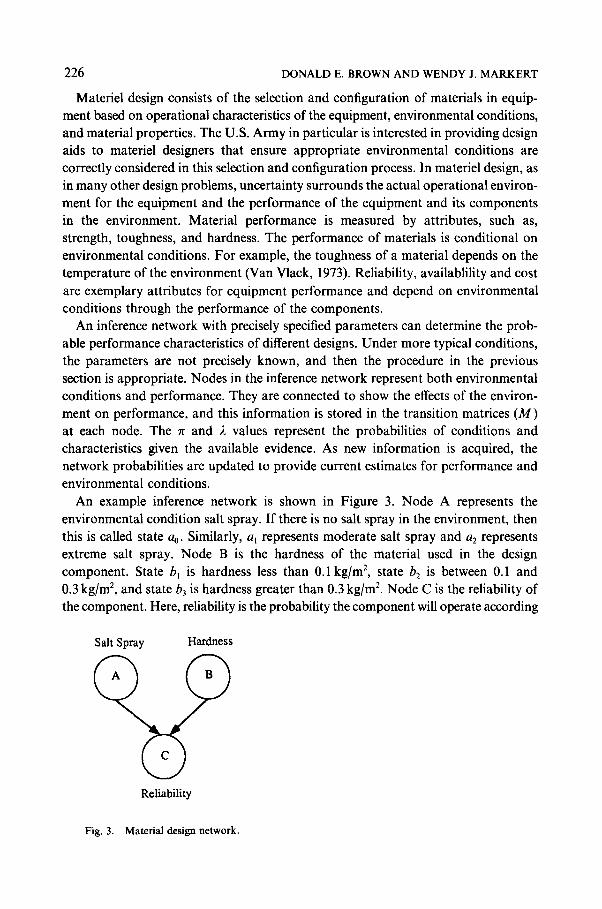
An example inference network is shown in Figure 3. Node A represents the environmental condition salt spray. If there is no salt spray in the environment, then this is called state a0. Similarly, al represents moderate salt spray and a2 represents extreme salt spray. Node B is the hardness of the material used in the design component. State bl is hardness less than 0.1 kg/m 2, state b 2 is between 0.1 and 0.3 kg/m% and state b 3 is hardness greater than 0.3 kg/m 2. Node C is the reliability of the component. Here, reliability is the probability the component will operate according
Salt S p r a y Hardness
Reliability
Fig. 3. Material design network.
U N C E R T A I N M A N A G E M E N T WITH IMPRECISE K N O W L E D G E
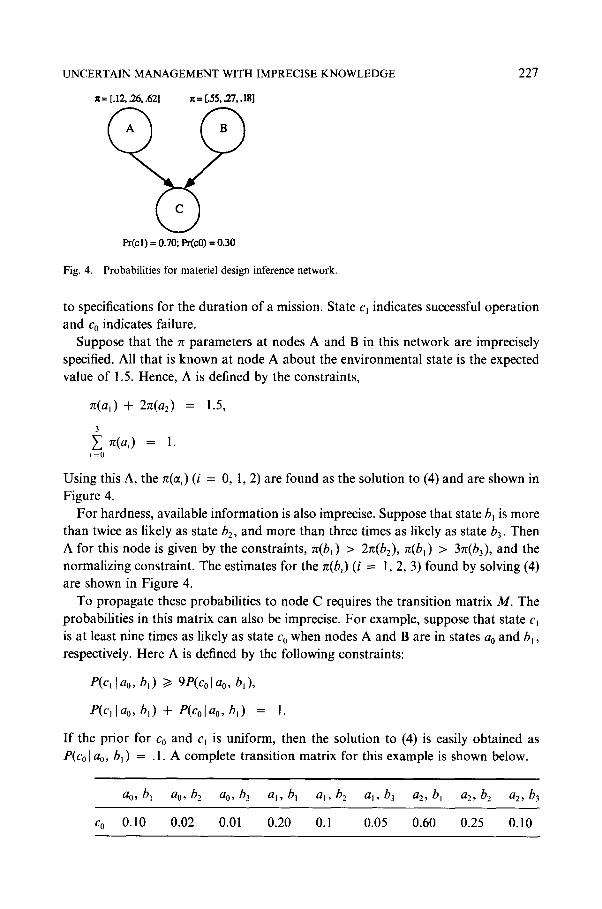
= [.12, .26, .62] ~ = [.55, .27, .18]
Pr(cl) = 0.70; Pr(c0) = 0.30
227
Fig. 4. Probabilities for materiel design inference network.
to specifications for the duration of a mission. State c~ indicates successful operation and Co indicates failure.
Suppose that the rt parameters at nodes A and B in this network are imprecisely specified. All that is known at node A about the environmental state is the expected value of 1.5. Hence, A is defined by the constraints,
7z(al) + 2~z(a2) = 1.5,
3
Z = 1. t--0
Using this A, the n(~,) (i = 0, l, 2) are found as the solution to (4) and are shown in Figure 4.
For hardness, available information is also imprecise. Suppose that state b~ is more than twice as likely as state b2, and more than three times as likely as state b3. Then A for this node is given by the constraints, n(bl) > 2x(b2), n(bt) > 3n(b3), and the normalizing constraint. The estimates for the re(b,) (i = l, 2, 3) found by solving (4) are shown in Figure 4.
To propagate these probabilities to node C requires the transition matrix M. The probabilities in this matrix can also be imprecise. For example, suppose that state c~ is at least nine times as likely as state c o when nodes A and B are in states a 0 and bt, respectively. Here A is defined by the following constraints:
P(c, [ ao, bl) >~ 9P(co [ ao, bl),
P(c, lao, b,) + P(co]ao, b,) = 1.
If the prior for Co and c~ is uniform, then the solution to (4) is easily obtained as P(co[ao, b~) = . 1. A complete transition matrix for this example is shown below.
a0, bl a0, b2 a0, b3 al, bl aj, b 2 al, b3 a2, bl a2, b2 a2, b3
Co 0.10 0.02 0.01 0.20 0.1 0.05 0.60 0.25 0.10
228 DONALD E. BROWN AND WENDY J. MARKERT
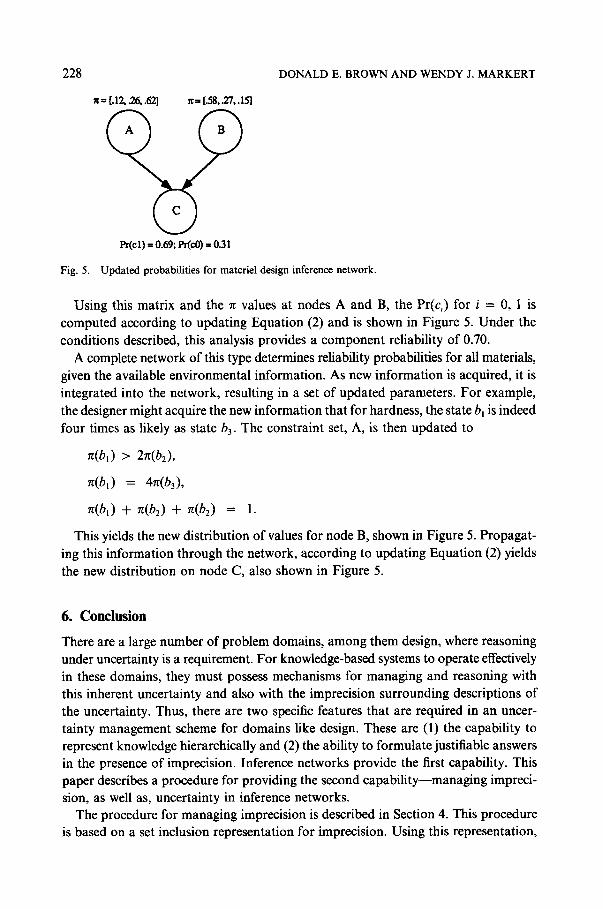
Fig. 5.
g= [A2, yaS,.62] g= [.58,~7, AS]
Pr(cl) = 0.69; Pr(cO) = 0.31
Updated probabilities for materiel design inference network.
Using this matrix and the ~ values at nodes A and B, the Pr(c,) for i = 0, 1 is computed according to updating Equation (2) and is shown in Figure 5. Under the conditions described, this analysis provides a component reliability of 0.70.
A complete network of this type determines reliability probabilities for all materials, given the available environmental information. As new information is acquired, it is integrated into the network, resulting in a set of updated parameters. For example, the designer might acquire the new information that for hardness, the state b~ is indeed four times as likely as state b 3 . The constraint set, A, is then updated to
g(bl ) > 2n(bz),
re(b,) = 4n(b3),
n(bl) + n(b2) + n(b2) = 1.
This yields the new distribution of values for node B, shown in Figure 5. Propagat- ing this information through the network, according to updating Equation (2) yields the new distribution on node C, also shown in Figure 5.
6. Conclusion
There are a large number of problem domains, among them design, where reasoning under uncertainty is a requirement. For knowledge-based systems to operate effectively in these domains, they must possess mechanisms for managing and reasoning with this inherent uncertainty and also with the imprecision surrounding descriptions of the uncertainty. Thus, there are two specific features that are required in an uncer- tainty management scheme for domains like design. These are (1) the capability to represent knowledge hierarchically and (2) the ability to formulate justifiable answers in the presence of imprecision. Inference networks provide the first capability. This paper describes a procedure for providing the second capability--managing impreci- sion, as well as, uncertainty in inference networks.
The procedure for managing imprecision is described in Section 4. This procedure is based on a set inclusion representation for imprecision. Using this representation,
UNCERTAIN MANAGEMENT WITH IMPRECISE KNOWLEDGE 229
parameters are specified only through their membership in sets, and not as precise point values. Set inclusion is particularly convenient, because it allows for expression of infomration in natural language statements. With this representation, inference based on information theoretic principles is employed to produce estimates for the imprecisely specified parameters. The specific inference procedure used, relative entropy minimization, is justifed as providing the asymptotic maximum likelihood value. This property is maintained by probabilities throughout an inference network, when minimum relative entropy estimates are propagated through a network using the standard Bayesian updating equations. Confidence statements regarding parameter values are obtained through additional analysis that imposes assumptions on the distribution of the parameters. It is quite easy to obtain extreme values for the parameters, and these combine with the (asymptotic) maximum likelihood value to give three points usable for density estimation. The specific form of the densities for the parameter is given at the end of Section 4.
Application of the above procedure is straightforward, and an illustrative example from our experience with materiel design was provided. This example, provides an indication of the flexibility of the procedure in managing imprecision.
There are many important issues regarding imprecision and uncertainty that are not addressed by the procedure described here. In particular, the inference network was assumed to be acyclic. There are instance where relationships between nodes generate cycles. Both updating schemes and imprecision management schemes are needed for these cases. Additional work is also needed to propagate confidence statements about parameters through the inference network. This means updating parameter estimates at a node based on changes to a density function for a parameter at a connected node. Finally, the method described here is applicable to the influence diagram: a network representation used for decision making under uncertainty (Matheson and Howard, 1983). Future work in all of these areas has the potential to provide powerful automated reasoning mechanisms for a large number of interesting and important problems.
Acknowledgement
This work was supported in part by the Jet Propulsion Laboratory under grant number 95722, and by the U.S. Army Engineer Topographic Laboratories under short term student contract number DACA72-88-M0925.
References
Barclay, S. (1977) Handbook for Decision Analysis, Defense Advanced Research Projects Agency, Arlington, VA.
Brown, D. E. and Duren, B. (1986) Conflicting information integration for decision support, Decision Support Systems 2, 321-329.
Brown, D. E. and Smith, R. L. (1990) A correspondence principle for relative entropy minimization, Naval Research Logtstics, forthcoming.
230 DONALD E. BROWN AND WENDY J. MARKERT
Buchanan, B. G. and Shortliffe, E. H. (1984) Rule-Based Expert Systems, Addison-Wesley, Reading, MA. Cheeseman, P. (1983) A method of computing generalized Bayesian probability values for expert systems,
Proc. IJCAL Karlsruhe, pp. 198-202. Cohen, P. R. (1985) Heuristic Reasoning about Uncertainty: An Artificial Intelligence Approach, Pitman,
Boston. Duda, R. O., Hart, P. E., and Nilsson, N. J. (1976) Subjective Bayesian methods for rule-based inference
systems, Proc. 1976 National Computer Conference, AFIPS Press, Motvale NJ. Heckerman, D. (1985) A probabilistic interpretation for MYCIN's certainty factors, AAAI Workshop on
Uncertainty and Probability, Los Angeles, pp. 9-20. Howard, R. A. and Matheson, J. E. (1983) Influence Diagrams, in Principles and Applications of Decision
Analysis, vol. 2 (eds R. A. Howard and J. E. Matheson), Strategic Decisions Group. Kanal, L. N. and Lemer, J. F. (1986) Uncertainty Management in Artificial Intelligence, North-Holland,
Amsterdam. Kim, J. H. and Pearl, J. (1987) CONVINCE: A CONVerstational INference Consolidation Engine, IEEE
Trans. Systems Man Cybernet. SMC-17 (No. 2). Lindley, D. V. (1971) Making Decisions, Wiley, London. Markert, W. J. (1990) A method of uncertainty management in design with imprecise knowledge, MS
Thesis, School of Engineering and Applied Science, University of Virginia, Charlottesville. Pearl, J. (1988) Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference, Morgan
Kaufmann, San Mateo, CA. Shafer, G. (1976) A Mathematical Theory of Evidence, Princeton University Press, Princeton, NJ. Shafer, G. and Logan, R. (1987) Implementing Dempster's rule for hierarchical evidence, Artificial Intelli-
gence 33, 271-298. Shore, J. E. and Johnson, R. W. (1981) Properties of cross-entropy minimization, IEEE Trans. Inform.
Theory IT-27, 472~,82. Spiegelhalter, D. J. (1986) A statistical view of uncertainty in expert systems, in Artificial Intelligence in
Statistics (ed. W. A. Gale), Addison-Wesley, Reading, MA. Van Vlack, L. H. (1973) A Textbook for Materials Technology, Addison-Wesley, Reading, MA. Zadeh, L. (1978) Fuzzy sets as the basis for a theory of possibility. J. Fuzzy Sets Systems 1, 3-28.