the z -transform
TRANSCRIPT
The Z - Transform
1
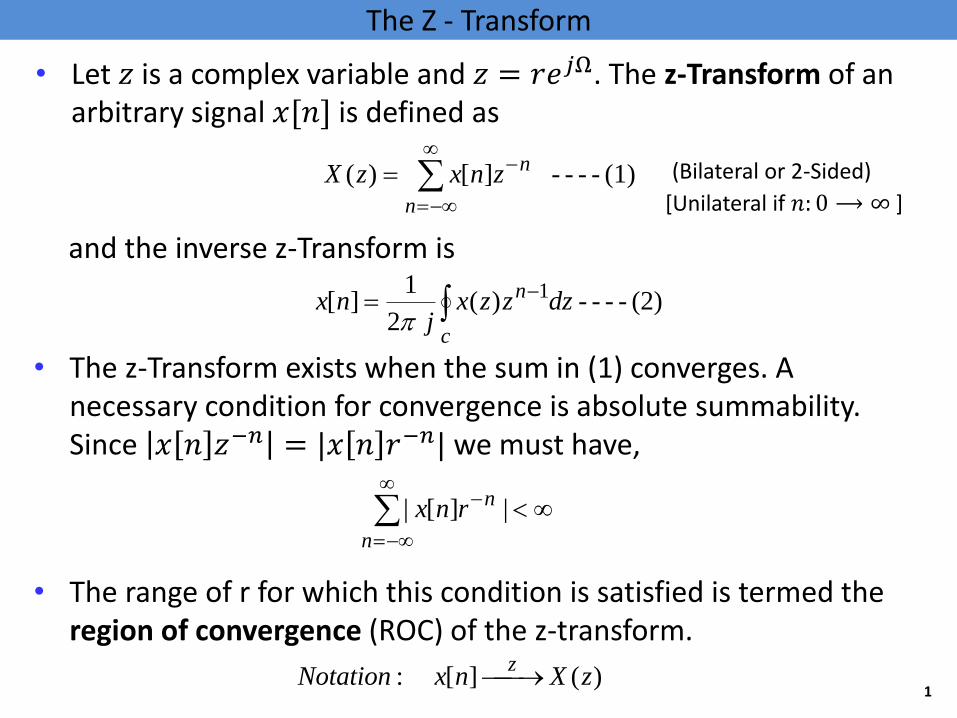
• Let 𝑧 is a complex variable and 𝑧 = 𝑟𝑒𝑗Ω. The z-Transform of an arbitrary signal 𝑥[𝑛] is defined as
(1) ---- ][)(
n
nznxzX
and the inverse z-Transform is
c
n dzzzxj
nx (2) ---- )(2
1][ 1
• The z-Transform exists when the sum in (1) converges. A necessary condition for convergence is absolute summability. Since 𝑥 𝑛 𝑧−𝑛 = |𝑥 𝑛 𝑟−𝑛| we must have,
n
nrnx |][|
• The range of r for which this condition is satisfied is termed the region of convergence (ROC) of the z-transform.
(Bilateral or 2-Sided)
[Unilateral if 𝑛: 0 ⟶ ∞ ]
)(][ : zXnxNotationz
Example 1
2 Check complete solution in class
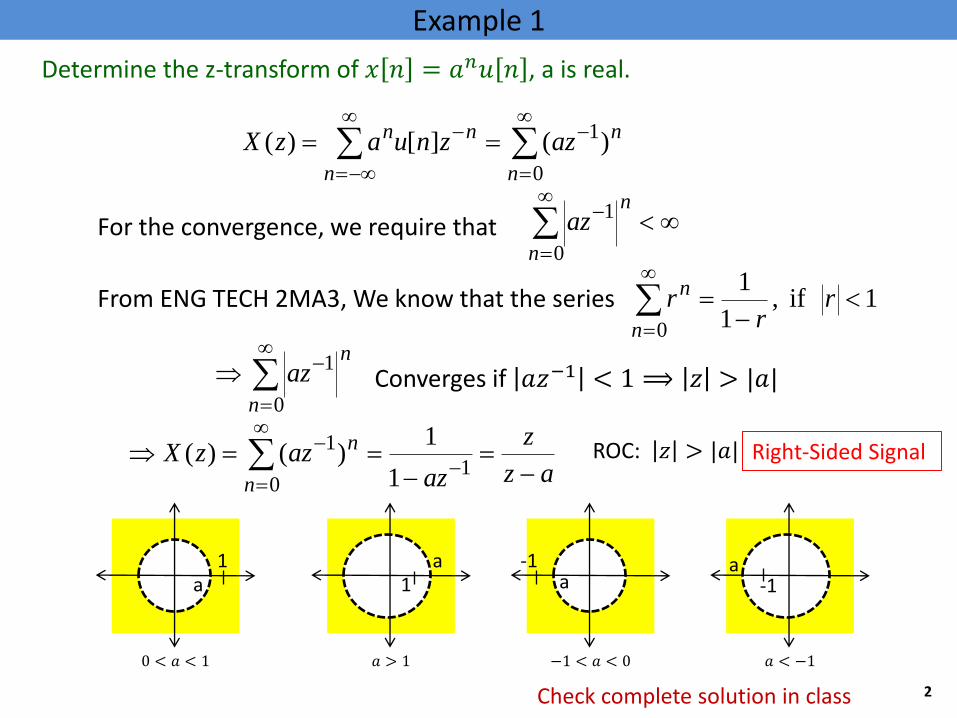
Determine the z-transform of 𝑥 𝑛 = 𝑎𝑛𝑢 𝑛 , a is real.
For the convergence, we require that
0
1)(][)(n
n
n
nn azznuazX
0
1
n
naz
From ENG TECH 2MA3, We know that the series 1 if ,1
1
0
rr
rn
n
0
1
n
naz Converges if 𝑎𝑧−1 < 1 ⟹ 𝑧 > |𝑎|
az
z
azazzX
n
n
1
0
1
1
1)()( ROC: 𝑧 > |𝑎|
a 1
0 < 𝑎 < 1
1 a
𝑎 > 1
a -1
−1 < 𝑎 < 0
-1 a
𝑎 < −1
Right-Sided Signal
Example 2
3 Check complete solution in class
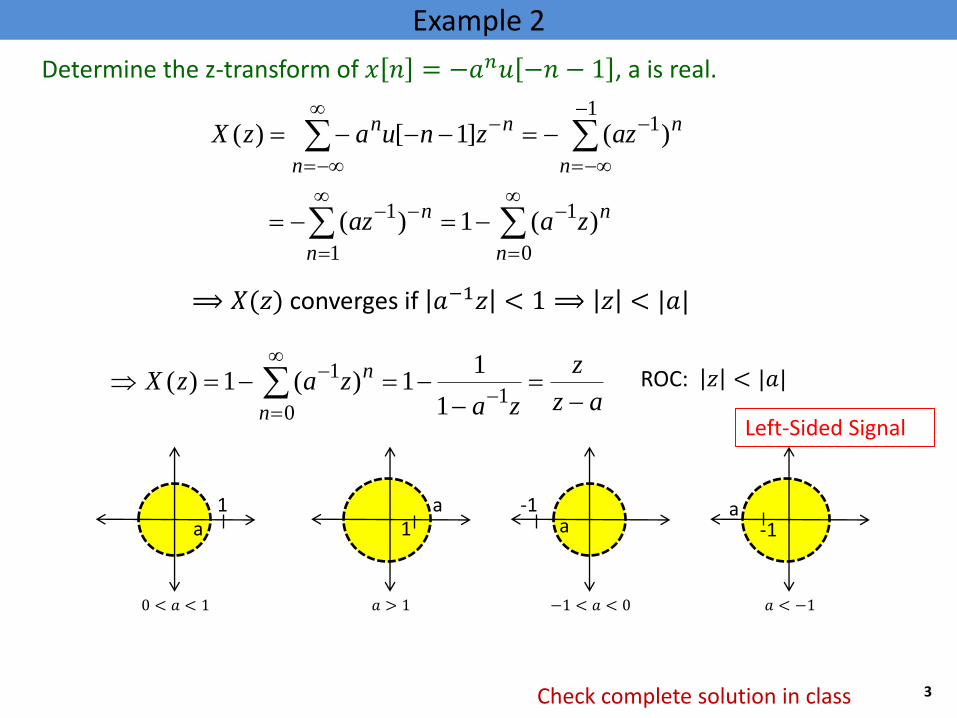
Determine the z-transform of 𝑥 𝑛 = −𝑎𝑛𝑢 −𝑛 − 1 , a is real.
0
1
1
1
11
)(1)(
)(]1[)(
n
n
n
n
n
n
n
nn
zaaz
azznuazX
⟹ 𝑋(𝑧) converges if 𝑎−1𝑧 < 1 ⟹ 𝑧 < |𝑎|
az
z
zazazX
n
n
1
0
1
1
11)(1)( ROC: 𝑧 < |𝑎|
a 1
0 < 𝑎 < 1
1 a
𝑎 > 1
a -1
−1 < 𝑎 < 0
-1 a
𝑎 < −1
Left-Sided Signal
Example 3
4 Check complete solution in class
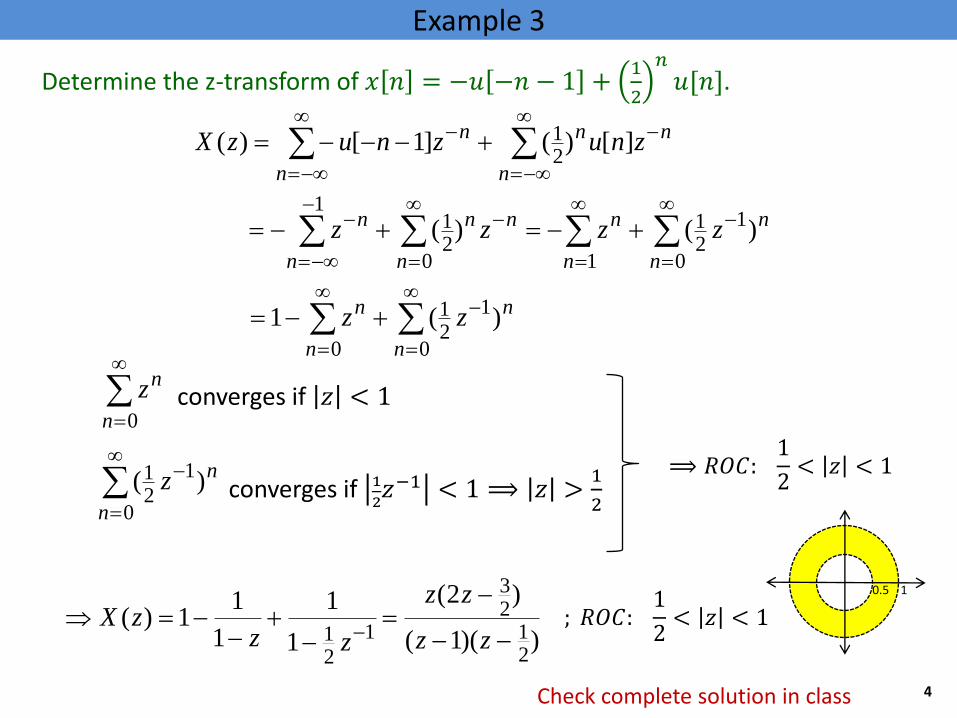
Determine the z-transform of 𝑥 𝑛 = −𝑢 −𝑛 − 1 +1
2
𝑛𝑢[𝑛].
n
nn
n
n znuznuzX ][)(]1[)(21
converges if 𝑧 < 1
))(1(
)2(
1
1
1
11)(
21
23
1
21
zz
zz
zzzX
0n
nz
0
1
21 )(
n
nz converges if 1
2𝑧−1 < 1 ⟹ 𝑧 >
1
2
⟹ 𝑅𝑂𝐶: 1
2< 𝑧 < 1
; 𝑅𝑂𝐶: 1
2< 𝑧 < 1
1 0.5
0
1
21
1021
1
)()(n
n
n
n
n
nn
n
n zzzz
0
1
21
0
)(1 n
n
n
n zz
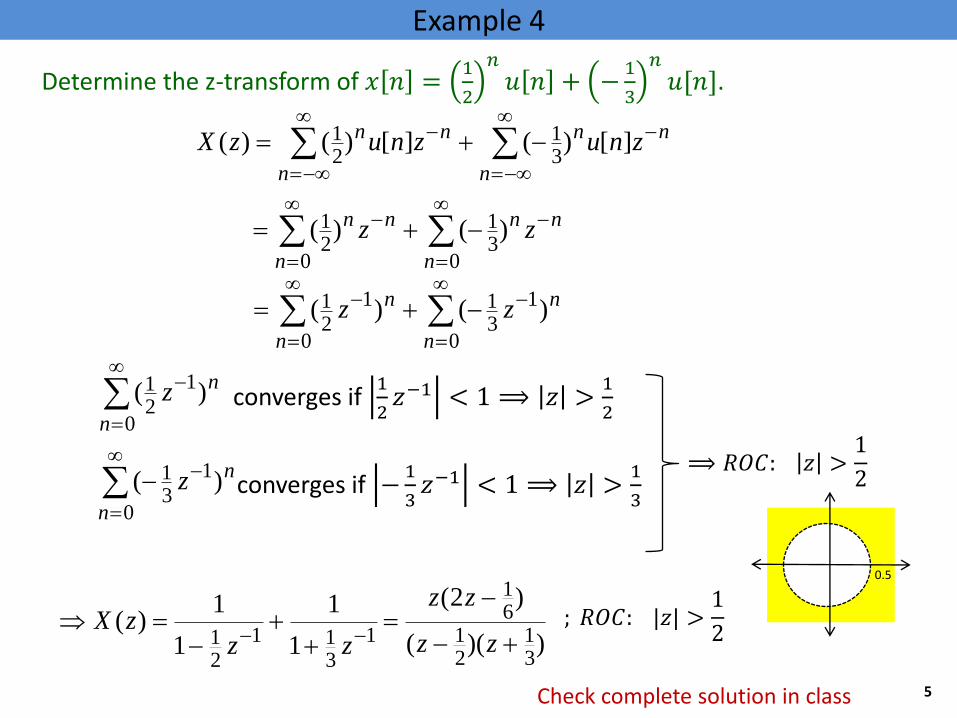
Example 4
5 Check complete solution in class
Determine the z-transform of 𝑥 𝑛 =1
2
𝑛𝑢 𝑛 + −
1
3
𝑛𝑢[𝑛].
n
nn
n
nn znuznuzX ][)(][)()(31
21
converges if 1
2𝑧−1 < 1 ⟹ 𝑧 >
1
2
))((
)2(
1
1
1
1)(
31
21
61
1
311
21
zz
zz
zzzX
0
1
21 )(
n
nz
0
1
31 )(
n
nz converges if −1
3𝑧−1 < 1 ⟹ 𝑧 >
1
3
⟹ 𝑅𝑂𝐶: 𝑧 >1
2
; 𝑅𝑂𝐶: |𝑧| >1
2
0
31
021 )()(
n
nn
n
nn zz
0
1
31
0
1
21 )()(
n
n
n
n zz
0.5
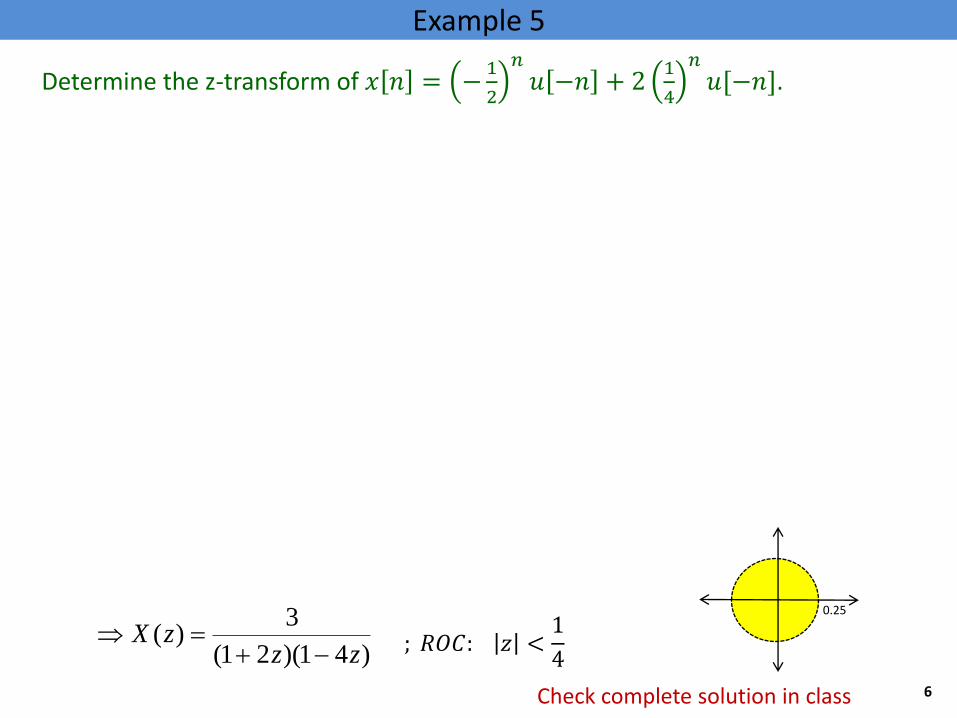
Example 5
6 Check complete solution in class
Determine the z-transform of 𝑥 𝑛 = −1
2
𝑛𝑢 −𝑛 + 2
1
4
𝑛𝑢[−𝑛].
)41)(21(
3)(
zzzX
; 𝑅𝑂𝐶: 𝑧 <
1
4
0.25
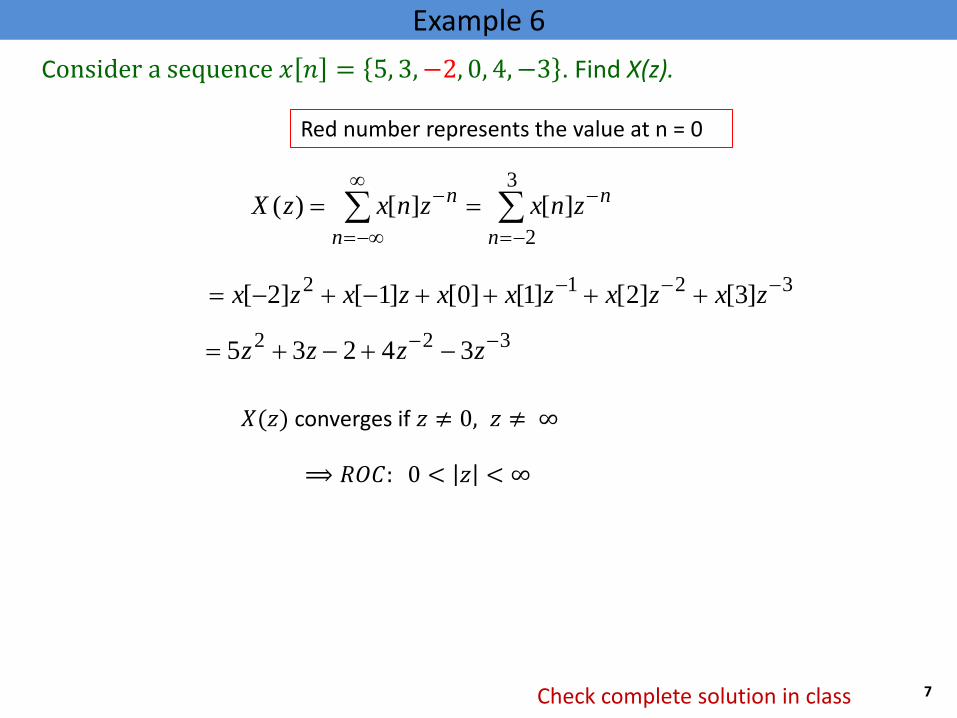
Example 6
7 Check complete solution in class
Consider a sequence 𝑥 𝑛 = 5, 3, −2, 0, 4, −3 . Find X(z).
Red number represents the value at n = 0
3
2
][][)(n
n
n
n znxznxzX
3212 ]3[]2[]1[]0[]1[]2[ zxzxzxxzxzx
322 34235 zzzz
𝑋(𝑧) converges if 𝑧 ≠ 0, 𝑧 ≠ ∞
⟹ 𝑅𝑂𝐶: 0 < 𝑧 < ∞
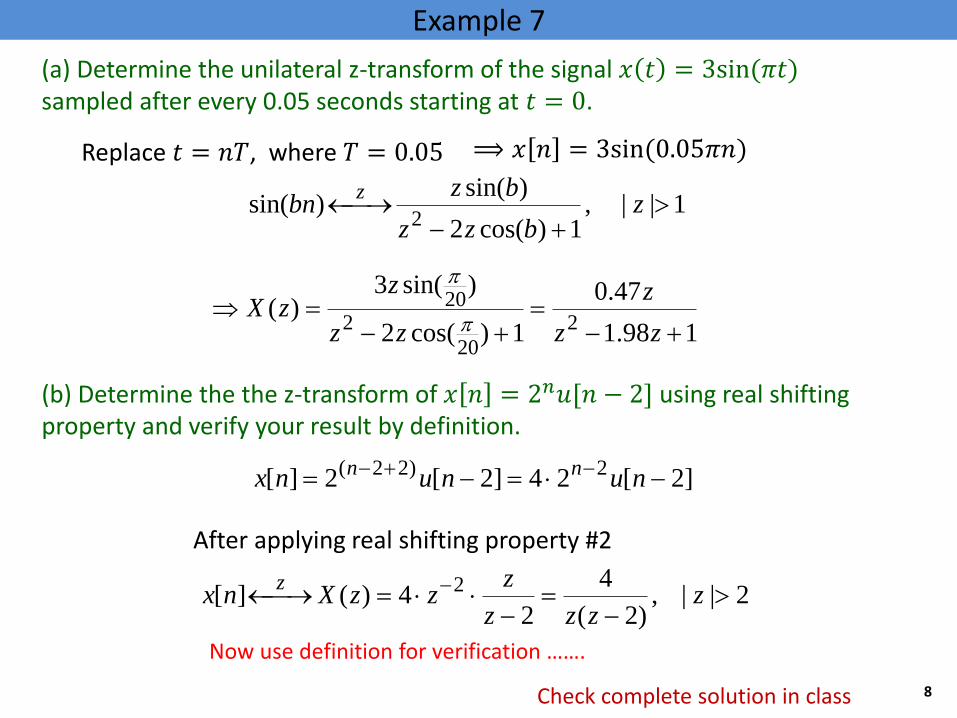
Example 7
8 Check complete solution in class
(a) Determine the unilateral z-transform of the signal 𝑥 𝑡 = 3sin (𝜋𝑡) sampled after every 0.05 seconds starting at 𝑡 = 0.
Replace 𝑡 = 𝑛𝑇, where 𝑇 = 0.05 ⟹ 𝑥 𝑛 = 3sin (0.05𝜋𝑛)
1|| ,1)cos(2
)sin()sin(
2
z
bzz
bzbn
z
198.1
47.0
1)cos(2
)sin(3)(
2
20
220
zz
z
zz
zzX
(b) Determine the the z-transform of 𝑥 𝑛 = 2𝑛𝑢[𝑛 − 2] using real shifting property and verify your result by definition.
]2[24]2[2][ 2)22( nununx nn
After applying real shifting property #2
2|| ,)2(
4
24)(][ 2
z
zzz
zzzXnx
z
Now use definition for verification …….
Example 8
9 Check complete solution in class
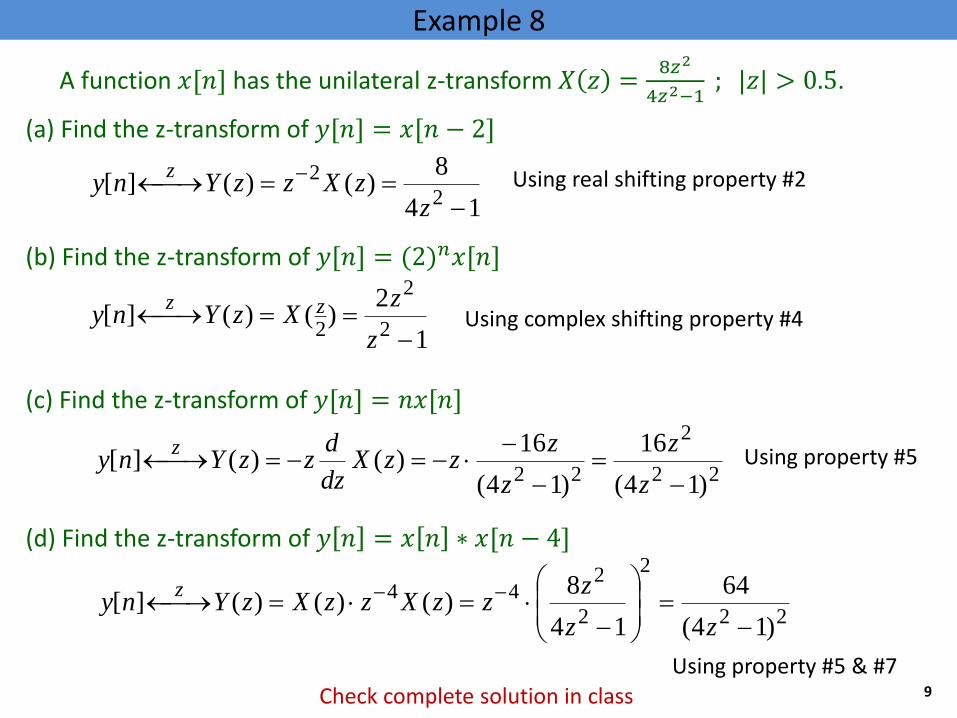
A function 𝑥[𝑛] has the unilateral z-transform 𝑋 𝑧 =8𝑧2
4𝑧2−1 ; |𝑧| > 0.5.
(a) Find the z-transform of 𝑦[𝑛] = 𝑥[𝑛 − 2]
14
8)()(][
2
2
zzXzzYny
z Using real shifting property #2
(b) Find the z-transform of 𝑦[𝑛] = (2)𝑛𝑥[𝑛]
1
2)()(][
2
2
2
z
zXzYny zz
Using complex shifting property #4
(c) Find the z-transform of 𝑦[𝑛] = 𝑛𝑥[𝑛]
22
2
22 )14(
16
)14(
16)()(][
z
z
z
zzzX
dz
dzzYny
z Using property #5
(d) Find the z-transform of 𝑦 𝑛 = 𝑥 𝑛 ∗ 𝑥[𝑛 − 4]
22
2
2
244
)14(
64
14
8)()()(][
zz
zzzXzzXzYny
z
Using property #5 & #7
Example 9
10 Check complete solution in class
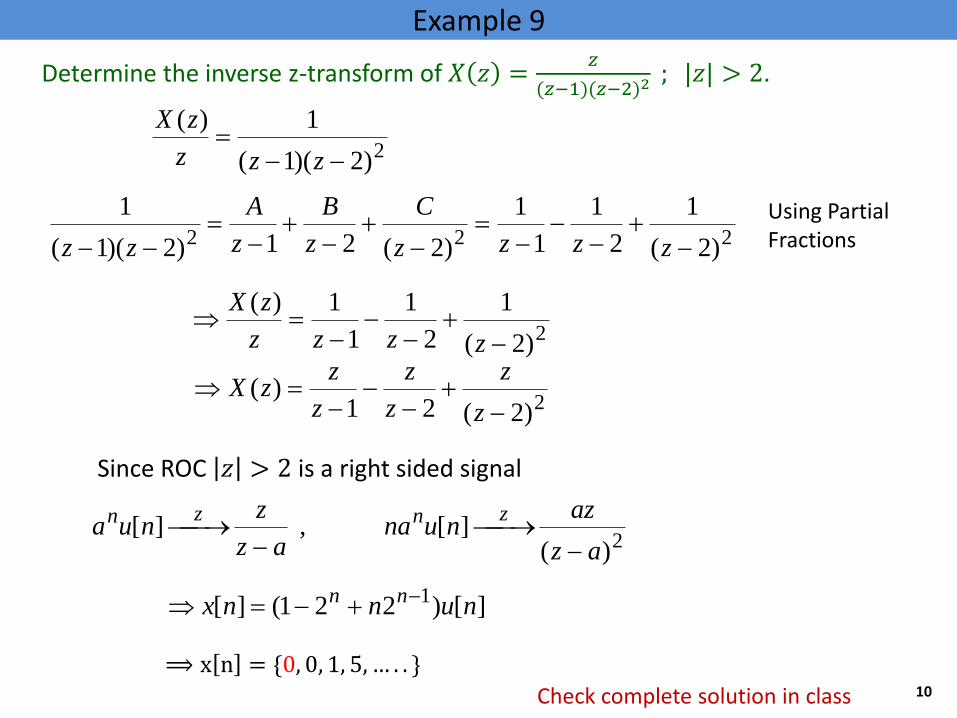
Determine the inverse z-transform of 𝑋 𝑧 =𝑧
(𝑧−1)(𝑧−2)2 ; |𝑧| > 2.
2)2)(1(
1)(
zzz
zX
222 )2(
1
2
1
1
1
)2(21)2)(1(
1
zzzz
C
z
B
z
A
zz
Using Partial Fractions
2)2(
1
2
1
1
1)(
zzzz
zX
2)2(21)(
z
z
z
z
z
zzX
Since ROC 𝑧 > 2 is a right sided signal
][)221(][ 1 nunnx nn
2)(][ , ][
az
aznuna
az
znua
znzn
⟹ x n = {0, 0, 1, 5, … . . }
Example 10
11 Check complete solution in class
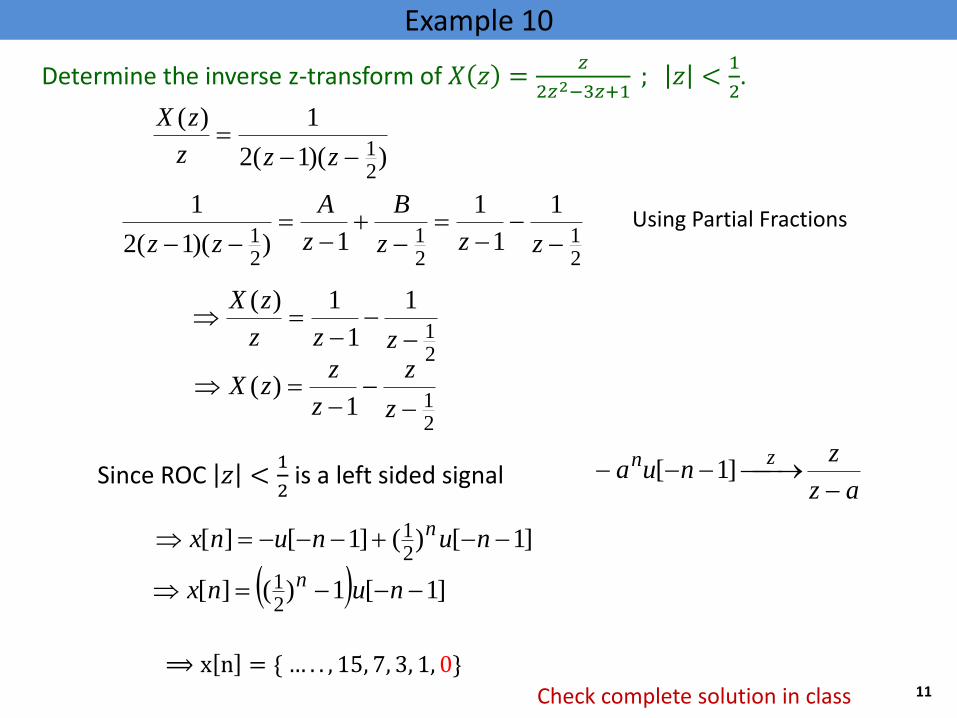
Determine the inverse z-transform of 𝑋 𝑧 =𝑧
2𝑧2−3𝑧+1 ; 𝑧 <
1
2.
))(1(2
1)(
21
zzz
zX
21
21
21
1
1
1
1))(1(2
1
zzz
B
z
A
zzUsing Partial Fractions
21
1
1
1)(
zzz
zX
211
)(
z
z
z
zzX
Since ROC 𝑧 <1
2 is a left sided signal
]1[)(]1[][21 nununx n
⟹ x n = { … . . , 15, 7, 3, 1, 0}
]1[1)(][21 nunx n
]1[az
znua
zn
Example 11
12 Check complete solution in class
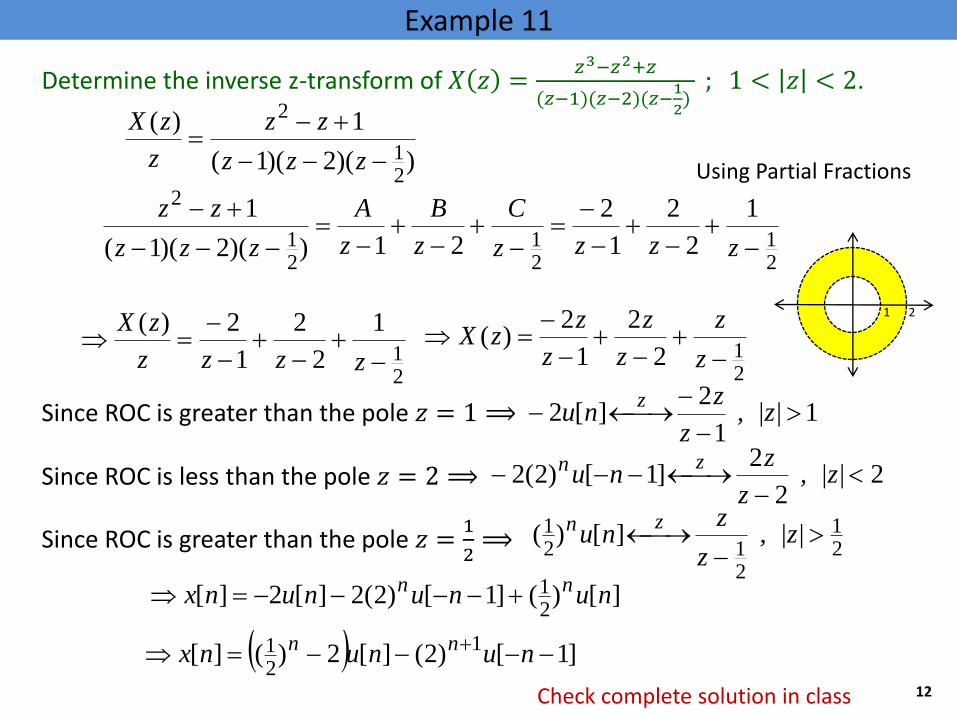
Determine the inverse z-transform of 𝑋 𝑧 =𝑧3−𝑧2+𝑧
(𝑧−1)(𝑧−2)(𝑧−1
2)
; 1 < 𝑧 < 2.
))(2)(1(
1)(
21
2
zzz
zz
z
zX
21
21
21
2 1
2
2
1
2
21))(2)(1(
1
zzzz
C
z
B
z
A
zzz
zz
Using Partial Fractions
21
1
2
2
1
2)(
zzzz
zX
212
2
1
2)(
z
z
z
z
z
zzX
21
212
1 ][)(
, |z|z
znu
znSince ROC is greater than the pole 𝑧 =
1
2⟹
11
2][2
, |z|
z
znu
zSince ROC is greater than the pole 𝑧 = 1 ⟹
22
2]1[)2(2
, |z|
z
znu
znSince ROC is less than the pole 𝑧 = 2 ⟹
][)(]1[)2(2][2][21 nunununx nn
]1[)2(][2)(][ 1
21 nununx nn
2 1
Example 12
13 Check complete solution in class
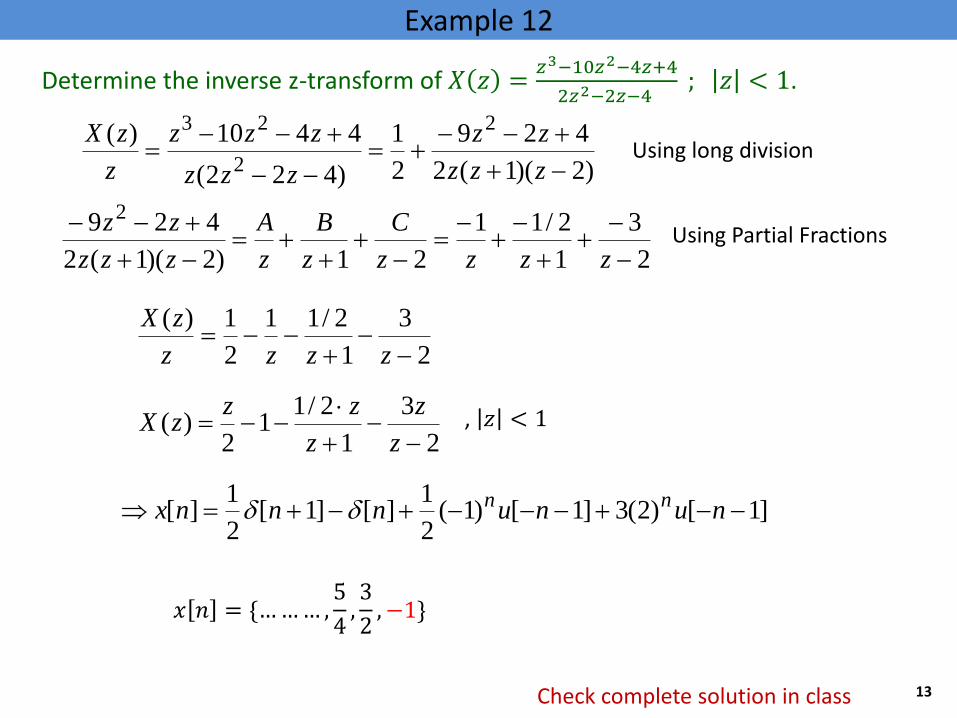
Determine the inverse z-transform of 𝑋 𝑧 =𝑧3−10𝑧2−4𝑧+4
2𝑧2−2𝑧−4 ; 𝑧 < 1.
Using Partial Fractions
)2)(1(2
429
2
1
)422(
4410)( 2
2
23
zzz
zz
zzz
zzz
z
zX
2
3
1
2/11
21)2)(1(2
429 2
zzzz
C
z
B
z
A
zzz
zz
Using long division
2
3
1
2/11
2
1)(
zzzz
zX
2
3
1
2/11
2)(
z
z
z
zzzX , 𝑧 < 1
]1[)2(3]1[)1(2
1][]1[
2
1][ nununnnx nn
𝑥 𝑛 = {… … … ,5
4,3
2, −1}
Example 13
14 Check complete solution in class
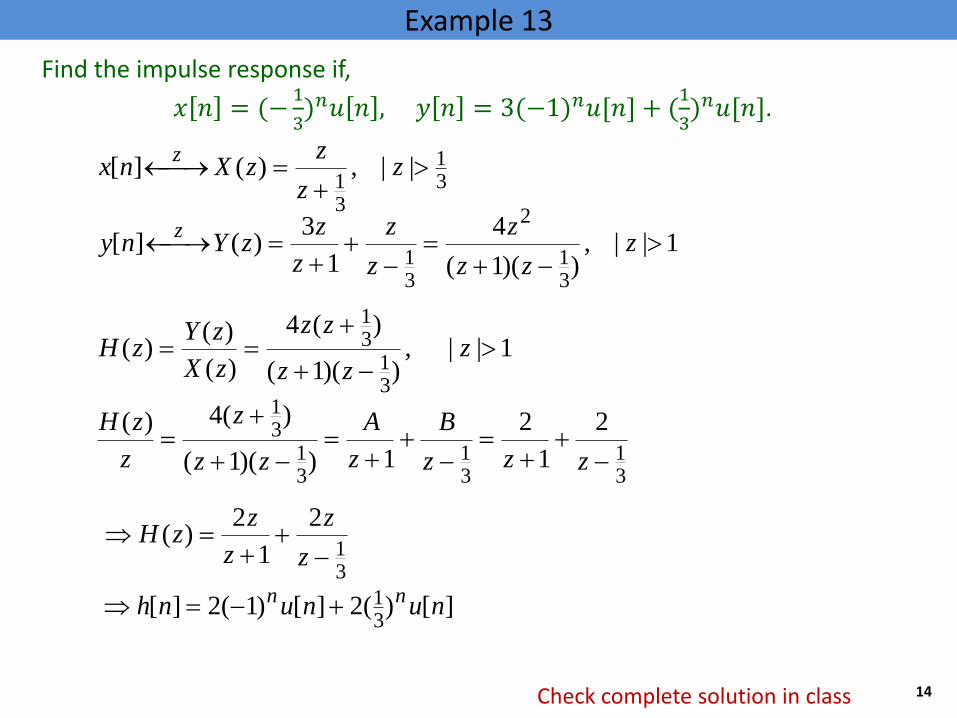
Find the impulse response if,
𝑥 𝑛 = (−1
3)𝑛𝑢 𝑛 , 𝑦 𝑛 = 3(−1)𝑛𝑢[𝑛] + (
1
3)𝑛𝑢[𝑛].
31
31
|| ,)(][
zz
zzXnx
z
1|| ,))(1(
4
1
3)(][
31
2
31
zzz
z
z
z
z
zzYny
z
1|| ,))(1(
)(4
)(
)()(
31
31
z
zz
zz
zX
zYzH
31
31
31
31
2
1
2
1))(1(
)(4)(
zzz
B
z
A
zz
z
z
zH
31
2
1
2)(
z
z
z
zzH
][)(2][)1(2][31 nununh nn
Example 14
15 Check complete solution in class
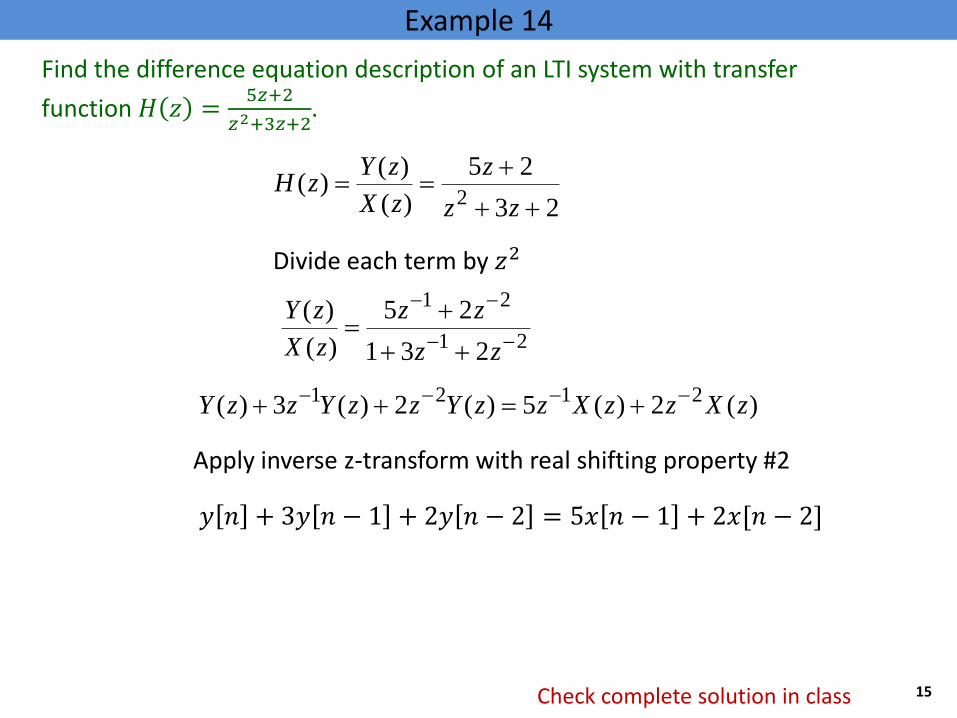
Find the difference equation description of an LTI system with transfer
function 𝐻 𝑧 =5𝑧+2
𝑧2+3𝑧+2.
23
25
)(
)()(
2
zz
z
zX
zYzH
21
21
231
25
)(
)(
zz
zz
zX
zY
Divide each term by 𝑧2
)(2)(5)(2)(3)( 2121 zXzzXzzYzzYzzY
Apply inverse z-transform with real shifting property #2
𝑦 𝑛 + 3𝑦 𝑛 − 1 + 2𝑦 𝑛 − 2 = 5𝑥 𝑛 − 1 + 2𝑥[𝑛 − 2]
Example 15
16 Check complete solution in class
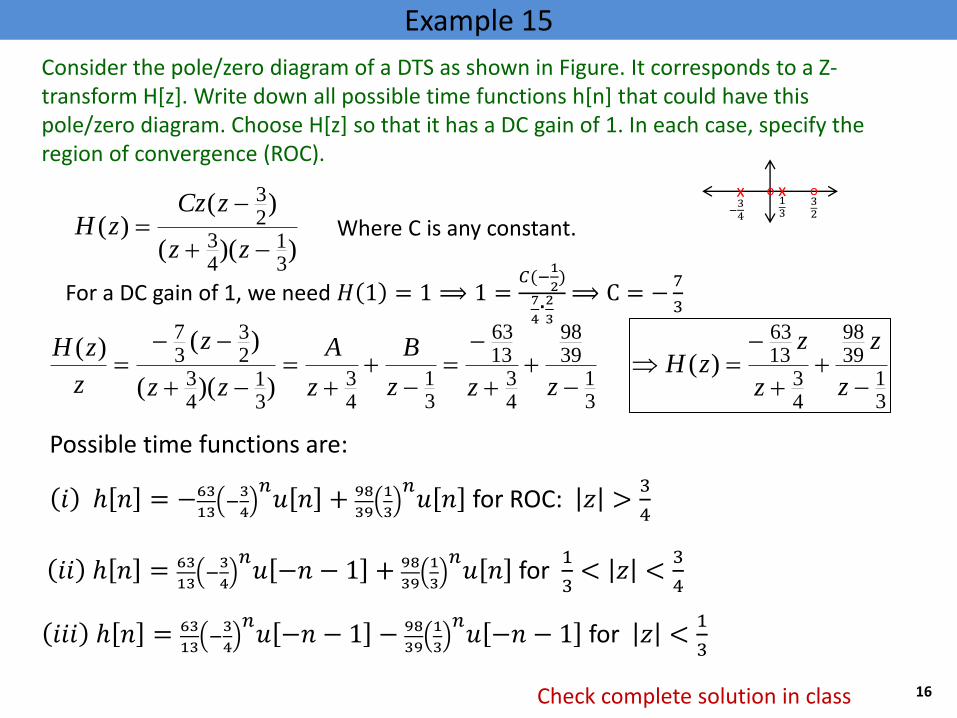
Consider the pole/zero diagram of a DTS as shown in Figure. It corresponds to a Z-transform H[z]. Write down all possible time functions h[n] that could have this pole/zero diagram. Choose H[z] so that it has a DC gain of 1. In each case, specify the region of convergence (ROC).
x x o o
−34
13 3
2
))((
)()(
31
43
23
zz
zCzzH Where C is any constant.
For a DC gain of 1, we need 𝐻 1 = 1 ⟹ 1 =𝐶(−
1
2)
7
4∙2
3
⟹ C = −7
3
31
3998
43
1363
31
43
31
43
23
37
))((
)()(
zzz
B
z
A
zz
z
z
zH
31
3998
43
1363
)(
z
z
z
zzH
Possible time functions are:
𝑖 ℎ 𝑛 = −63
13−
3
4
𝑛𝑢 𝑛 + 98
39
1
3
𝑛𝑢 𝑛 for ROC: 𝑧 >
3
4
𝑖𝑖 ℎ 𝑛 = 63
13−
3
4
𝑛𝑢 −𝑛 − 1 + 98
39
1
3
𝑛𝑢 𝑛 for
1
3< 𝑧 <
3
4
𝑖𝑖𝑖 ℎ 𝑛 = 63
13−
3
4
𝑛𝑢 −𝑛 − 1 − 98
39
1
3
𝑛𝑢 −𝑛 − 1 for 𝑧 <
1
3
Example 16
17 Check complete solution in class
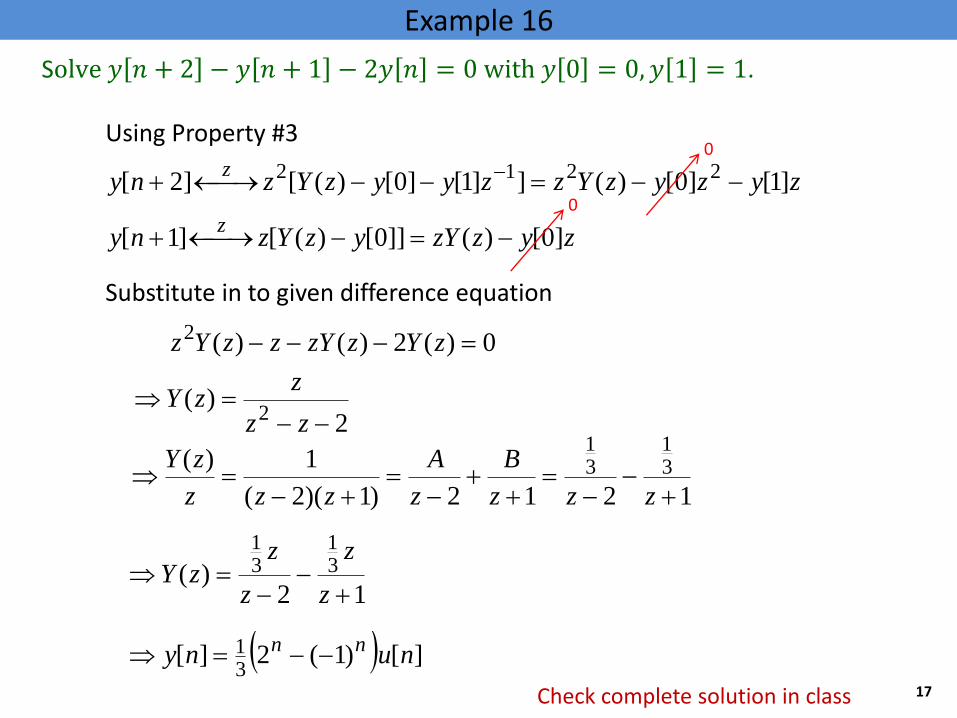
Solve 𝑦 𝑛 + 2 − 𝑦 𝑛 + 1 − 2𝑦 𝑛 = 0 with 𝑦 0 = 0, 𝑦 1 = 1.
zyzyzYzzyyzYznyz
]1[]0[)(]]1[]0[)([]2[ 2212
zyzzYyzYznyz
]0[)(]]0[)([]1[
Using Property #3 0
0
Substitute in to given difference equation
0)(2)()(2 zYzzYzzYz
2)(
2
zz
zzY
1212)1)(2(
1)( 31
31
zzz
B
z
A
zzz
zY
12)( 3
131
z
z
z
zzY
][)1(2][31 nuny nn
Example 17
18 Check complete solution in class
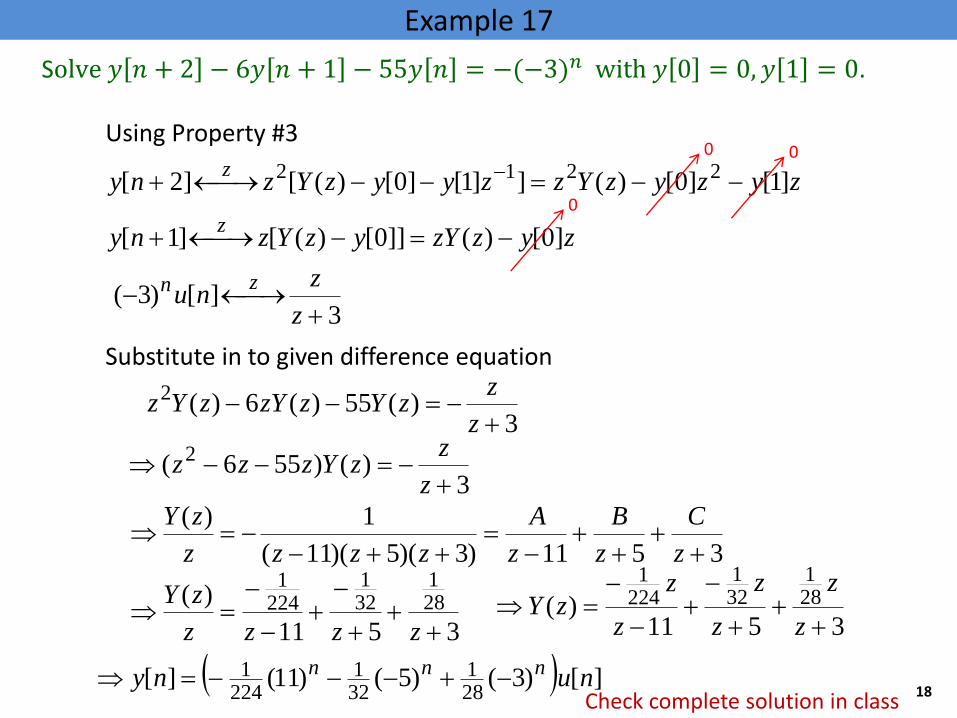
Solve 𝑦 𝑛 + 2 − 6𝑦 𝑛 + 1 − 55𝑦 𝑛 = −(−3)𝑛 with 𝑦 0 = 0, 𝑦 1 = 0.
zyzyzYzzyyzYznyz
]1[]0[)(]]1[]0[)([]2[ 2212
zyzzYyzYznyz
]0[)(]]0[)([]1[
Using Property #3 0
0
Substitute in to given difference equation
3)(55)(6)(2
z
zzYzzYzYz
3)()556( 2
z
zzYzzz
3511)3)(5)(11(
1)(
z
C
z
B
z
A
zzzz
zY
][)3()5()11(][281
321
2241 nuny nnn
0
3][)3(
z
znu
zn
3511
)( 281
321
2241
zzzz
zY
3511)( 28
1321
2241
z
z
z
z
z
zzY