t sti2d organisation fonctionnelle d'une chaîne d'énergie
TRANSCRIPT
T STI2D Organisation fonctionnelle
d’une chaîne d’énergie
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 0 -
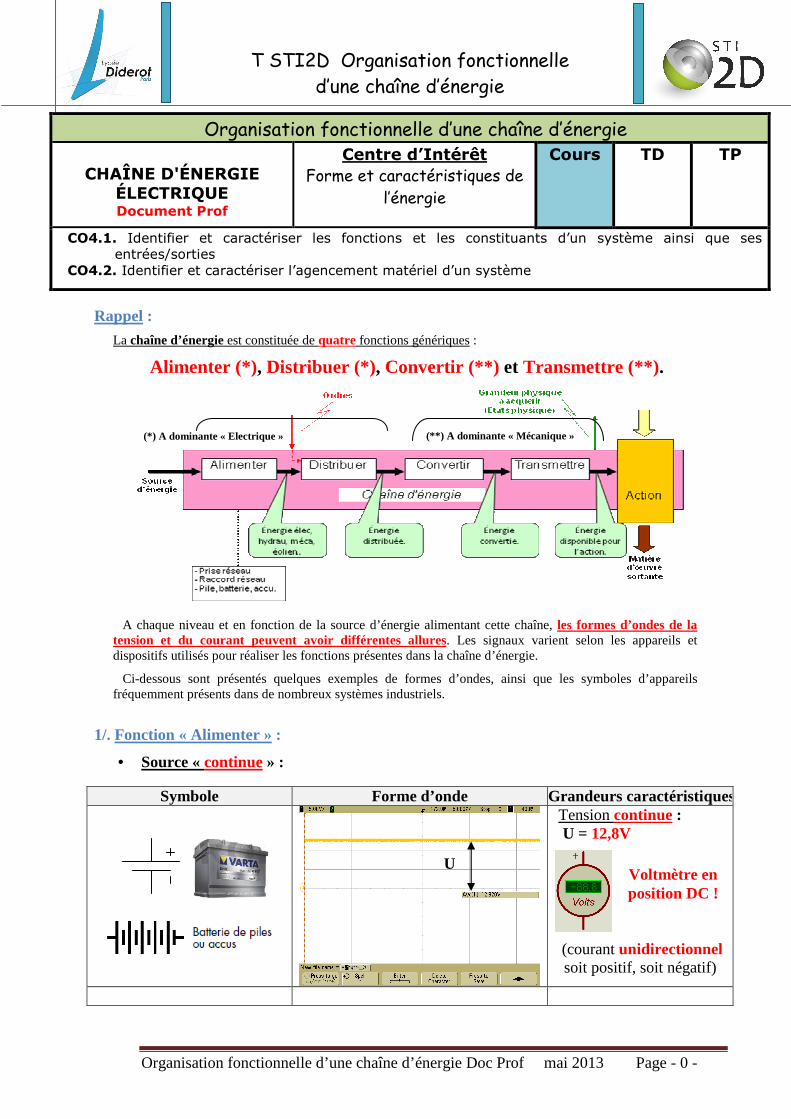
Rappel :
La chaîne d’énergie est constituée de quatre fonctions génériques :
Alimenter (*) , Distribuer (*) , Convertir (**) et Transmettre (**) .
A chaque niveau et en fonction de la source d’énergie alimentant cette chaîne, les formes d’ondes de la tension et du courant peuvent avoir différentes allures. Les signaux varient selon les appareils et dispositifs utilisés pour réaliser les fonctions présentes dans la chaîne d’énergie.
Ci-dessous sont présentés quelques exemples de formes d’ondes, ainsi que les symboles d’appareils fréquemment présents dans de nombreux systèmes industriels.
1/. Fonction « Alimenter » :
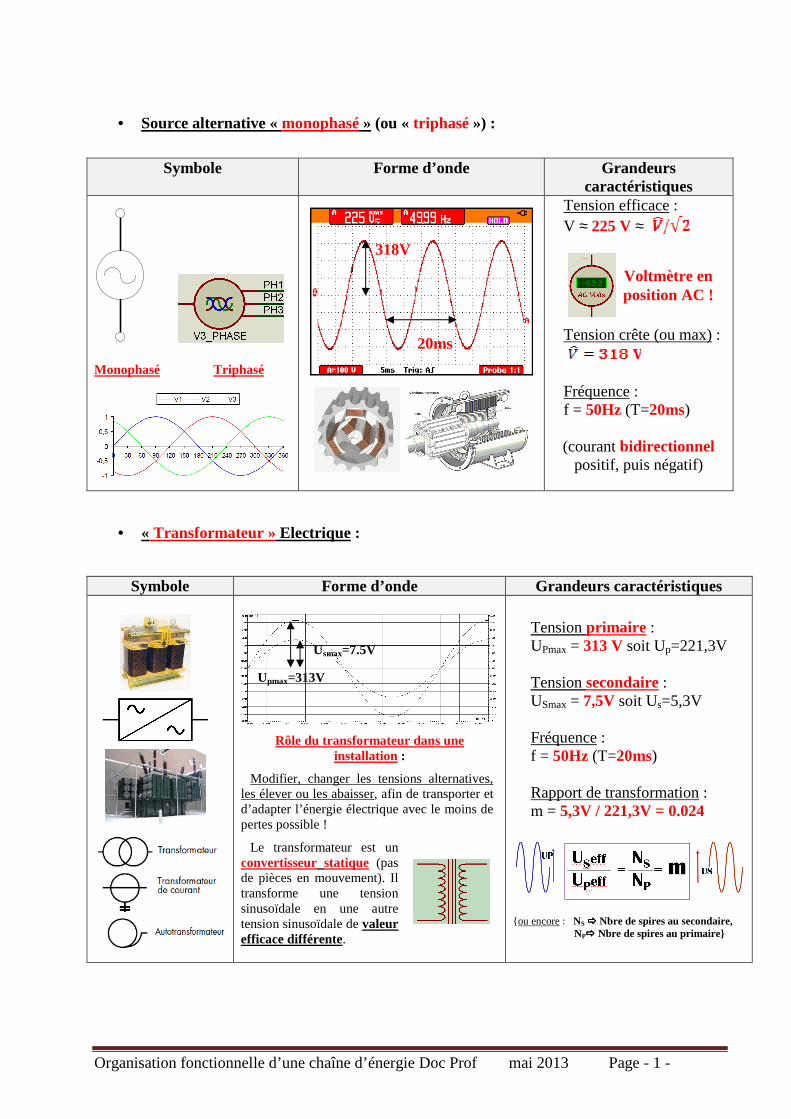
• Source « continue » :
Symbole Forme d’onde Grandeurs caractéristiques
Tension continue : U = 12,8V
(courant unidirectionnel soit positif, soit négatif)
Organisation fonctionnelle d’une chaîne d’énergie
CHAÎNE D'ÉNERGIE ÉLECTRIQUE Document Prof
Centre d’Intérêt Forme et caractéristiques de
l’énergie
Cours TD TP
CO4.1. Identifier et caractériser les fonctions et les constituants d’un système ainsi que ses entrées/sorties
CO4.2. Identifier et caractériser l’agencement matériel d’un système
U
(*) A dominante « Electrique » (**) A dominante « Mécanique »
Voltmètre en position DC !
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 1 -
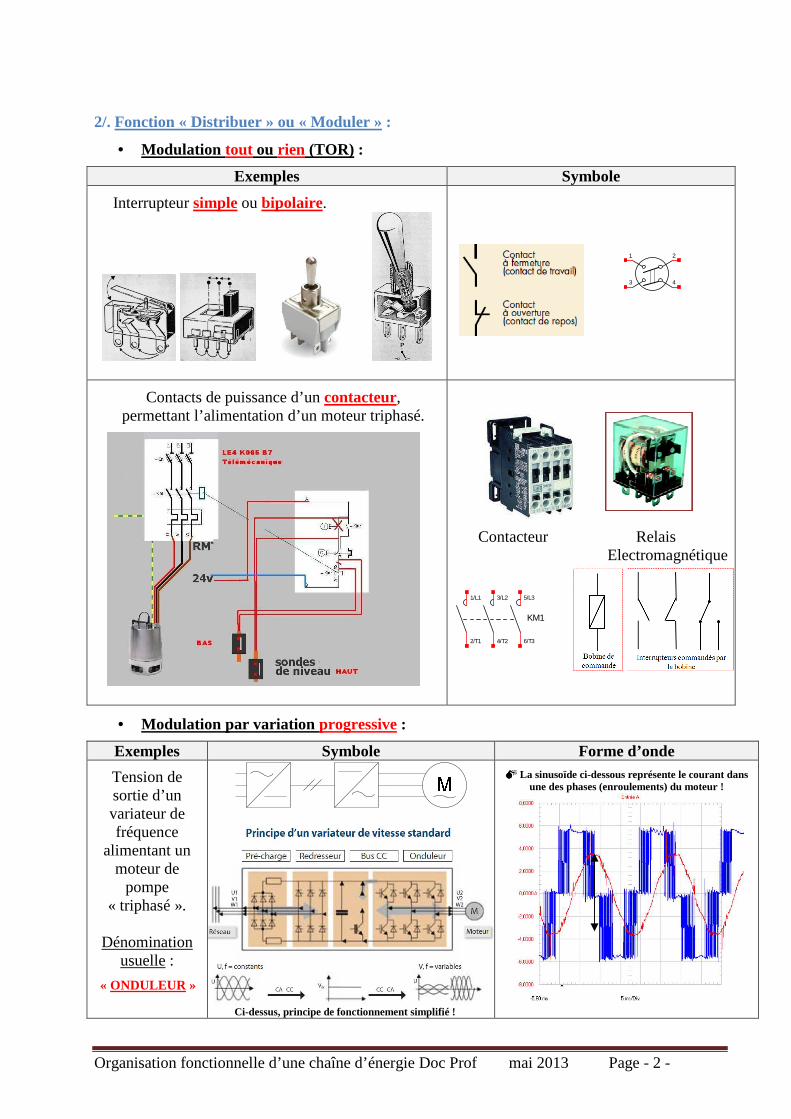
• Source alternative « monophasé » (ou « triphasé ») :
Symbole Forme d’onde Grandeurs caractéristiques
Monophasé Triphasé
Tension efficace : V ≈ 225 V ≈
Tension crête (ou max) : Fréquence : f = 50Hz (T=20ms) (courant bidirectionnel
positif, puis négatif)
• « Transformateur » Electrique :
Symbole Forme d’onde Grandeurs caractéristiques
Rôle du transformateur dans une installation :
Modifier, changer les tensions alternatives, les élever ou les abaisser, afin de transporter et d’adapter l’énergie électrique avec le moins de pertes possible !
Le transformateur est un convertisseur statique (pas de pièces en mouvement). Il transforme une tension sinusoïdale en une autre tension sinusoïdale de valeur efficace différente.
Tension primaire : UPmax = 313 V soit Up=221,3V Tension secondaire : USmax = 7,5V soit Us=5,3V Fréquence : f = 50Hz (T=20ms) Rapport de transformation : m = 5,3V / 221,3V = 0.024
ou encore : NS Nbre de spires au secondaire, NP Nbre de spires au primaire
Upmax=313V
Usmax=7.5V
Voltmètre en position AC !
318V
20ms
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 2 -
2/. Fonction « Distribuer » ou « Moduler » :
• Modulation tout ou rien (TOR) :
Exemples Symbole
Interrupteur simple ou bipolaire.
1
3
2
4
Contacts de puissance d’un contacteur, permettant l’alimentation d’un moteur triphasé.
Contacteur Relais Electromagnétique
KM1
5/L3
6/T3
3/L21/L1
2/T1 4/T2
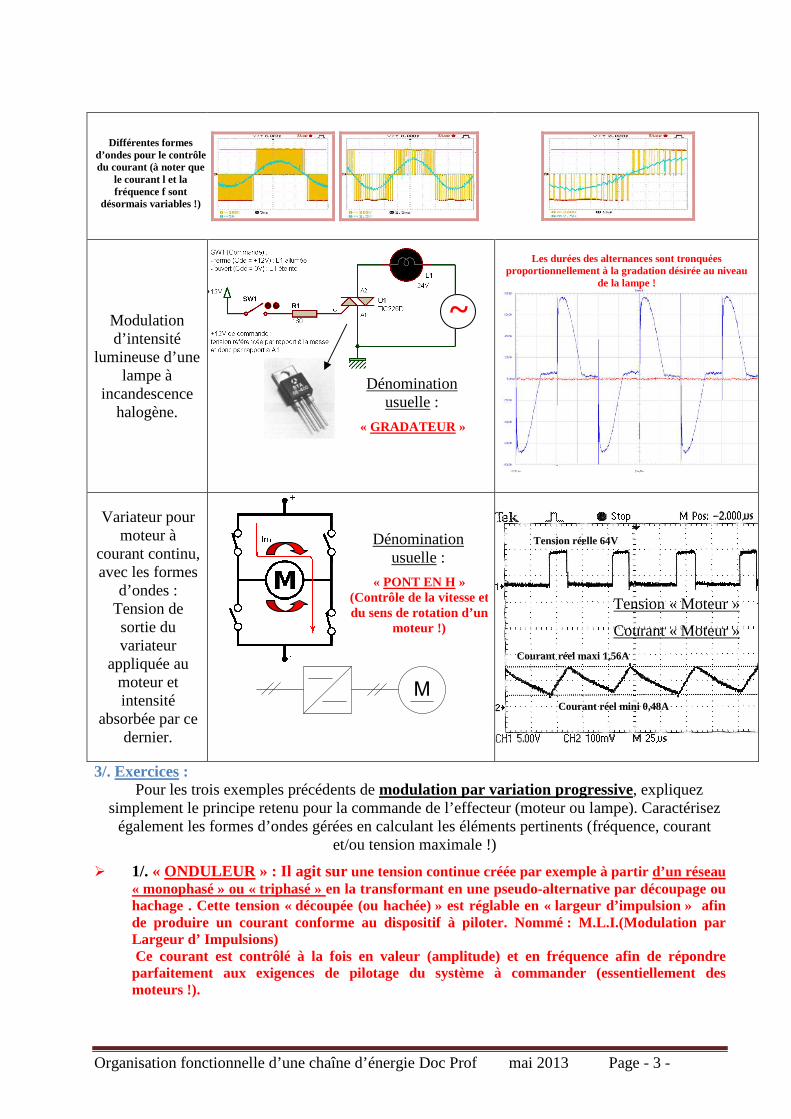
• Modulation par variation progressive :
Exemples Symbole Forme d’onde
Tension de sortie d’un variateur de fréquence
alimentant un moteur de
pompe « triphasé ».
Dénomination
usuelle :
« ONDULEUR »
Ci-dessus, principe de fonctionnement simplifié !
La sinusoïde ci-dessous représente le courant dans une des phases (enroulements) du moteur !
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 3 -
Différentes formes
d’ondes pour le contrôle du courant (à noter que
le courant l et la fréquence f sont
désormais variables !)
Modulation d’intensité
lumineuse d’une lampe à
incandescence halogène.
Les durées des alternances sont tronquées
proportionnellement à la gradation désirée au niveau de la lampe !
Variateur pour moteur à
courant continu, avec les formes
d’ondes : Tension de sortie du variateur
appliquée au moteur et intensité
absorbée par ce dernier.
M
3/. Exercices :
Pour les trois exemples précédents de modulation par variation progressive, expliquez simplement le principe retenu pour la commande de l’effecteur (moteur ou lampe). Caractérisez
également les formes d’ondes gérées en calculant les éléments pertinents (fréquence, courant et/ou tension maximale !)
1/. « ONDULEUR » : Il agit sur une tension continue créée par exemple à partir d’un réseau « monophasé » ou « triphasé » en la transformant en une pseudo-alternative par découpage ou hachage . Cette tension « découpée (ou hachée) » est réglable en « largeur d’impulsion » afin de produire un courant conforme au dispositif à piloter. Nommé : M.L.I.(Modulation par Largeur d’ Impulsions) Ce courant est contrôlé à la fois en valeur (amplitude) et en fréquence afin de répondre parfaitement aux exigences de pilotage du système à commander (essentiellement des moteurs !).
Tension « Moteur »
Courant « Moteur »
Tension réelle 64V
Courant réel maxi 1,56A
Courant réel mini 0,48A
Dénomination usuelle :
« GRADATEUR »
Dénomination usuelle :
« PONT EN H » (Contrôle de la vitesse et du sens de rotation d’un
moteur !)
~
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 4 -
Valeurs caractéristiques de l’exemple :
T ≈≈≈≈ 20ms / f ≈≈≈≈ 50Hz / IMAX ≈≈≈≈ 3.5A / IMIN ≈≈≈≈ -3.5A / ICAC ≈≈≈≈ 7A
2/. « GRADATEUR » : Sur l’oscillogramme présenté en exemple, les durées des alternances de la sinusoïde sont « tronquées » proportionnellement à la gradation désirée au niveau de l’effecteur !(Attention :problèmes réglage zéro et échelle)
Valeurs caractéristiques de l’exemple :
T ≈≈≈≈ 20ms / f ≈≈≈≈ 50hz / UMAX ≈≈≈≈ 36V / UMIN ≈≈≈≈ -36V / UCAC ≈≈≈≈ 72V
3/. « PONT en H » : Le pont en H est une structure électronique servant à contrôler la polarité aux bornes d'un dipôle. Il est composé de quatre éléments de commutation généralement disposés schématiquement en une forme de « H » d'où le nom. Le pont en « H » peut être commandé avec des signaux modulés en largeur d'impulsion (c'est-à-dire dont le rapport cyclique varie !)
Valeurs caractéristiques de l’exemple :
T ≈≈≈≈ 2,5div.25µs ≈≈≈≈ 62,5µs / f ≈≈≈≈ 16kHz UMAX ≈≈≈≈ 64V / UMIN ≈≈≈≈ 0V / IMAX ≈≈≈≈ 1,56A / IMIN ≈≈≈≈ 0,48A
Rapport Cyclique : αααα%= (th/T) .100
αααα%= [(0.64div. 25µs)/62,5µs]*100 αααα%= 27%
(On peut donc en extrapoler que le moteur est approximativement au quart de sa vitesse de
rotation maximale !)
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 5 -
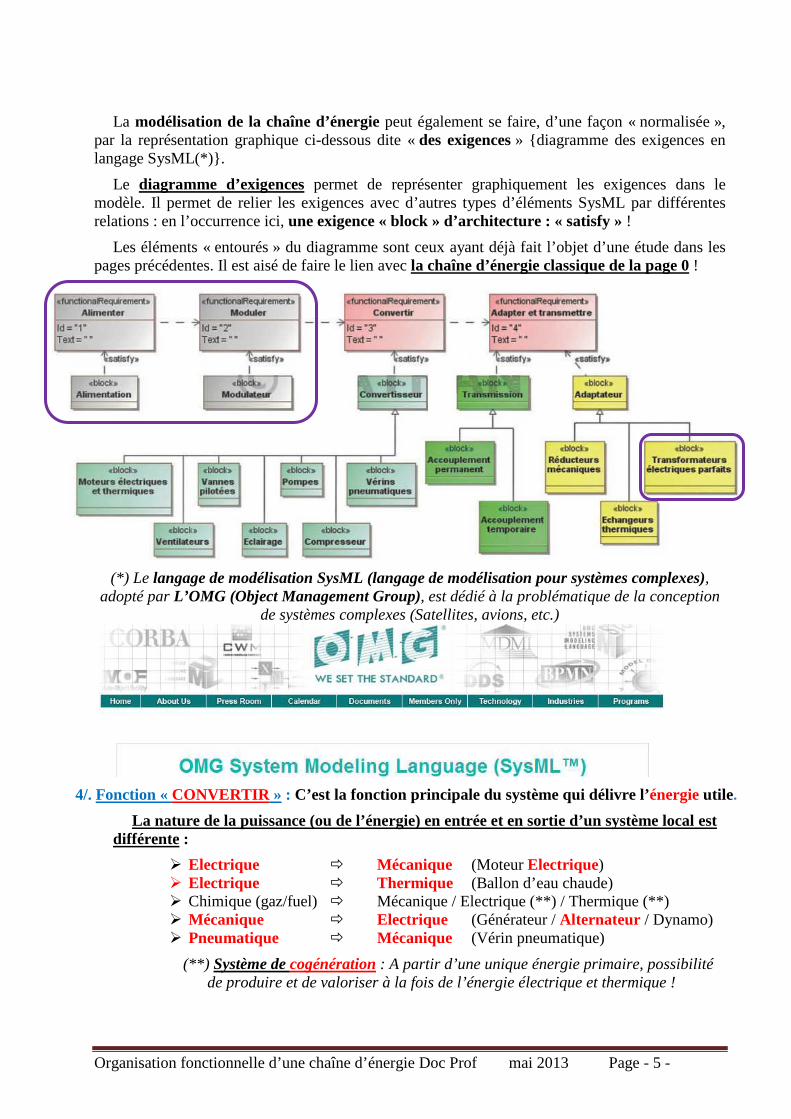
La modélisation de la chaîne d’énergie peut également se faire, d’une façon « normalisée », par la représentation graphique ci-dessous dite « des exigences » diagramme des exigences en langage SysML(*).
Le diagramme d’exigences permet de représenter graphiquement les exigences dans le modèle. Il permet de relier les exigences avec d’autres types d’éléments SysML par différentes relations : en l’occurrence ici, une exigence « block » d’architecture : « satisfy » !
Les éléments « entourés » du diagramme sont ceux ayant déjà fait l’objet d’une étude dans les pages précédentes. Il est aisé de faire le lien avec la chaîne d’énergie classique de la page 0 !
(*) Le langage de modélisation SysML (langage de modélisation pour systèmes complexes), adopté par L’OMG (Object Management Group), est dédié à la problématique de la conception
de systèmes complexes (Satellites, avions, etc.)
4/. Fonction « CONVERTIR » : C’est la fonction principale du système qui délivre l’ énergie utile.
La nature de la puissance (ou de l’énergie) en entrée et en sortie d’un système local est différente :
Electrique Mécanique (Moteur Electrique) Electrique Thermique (Ballon d’eau chaude) Chimique (gaz/fuel) Mécanique / Electrique (**) / Thermique (**) Mécanique Electrique (Générateur / Alternateur / Dynamo) Pneumatique Mécanique (Vérin pneumatique)
(**) Système de cogénération : A partir d’une unique énergie primaire, possibilité de produire et de valoriser à la fois de l’énergie électrique et thermique !
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 6 -
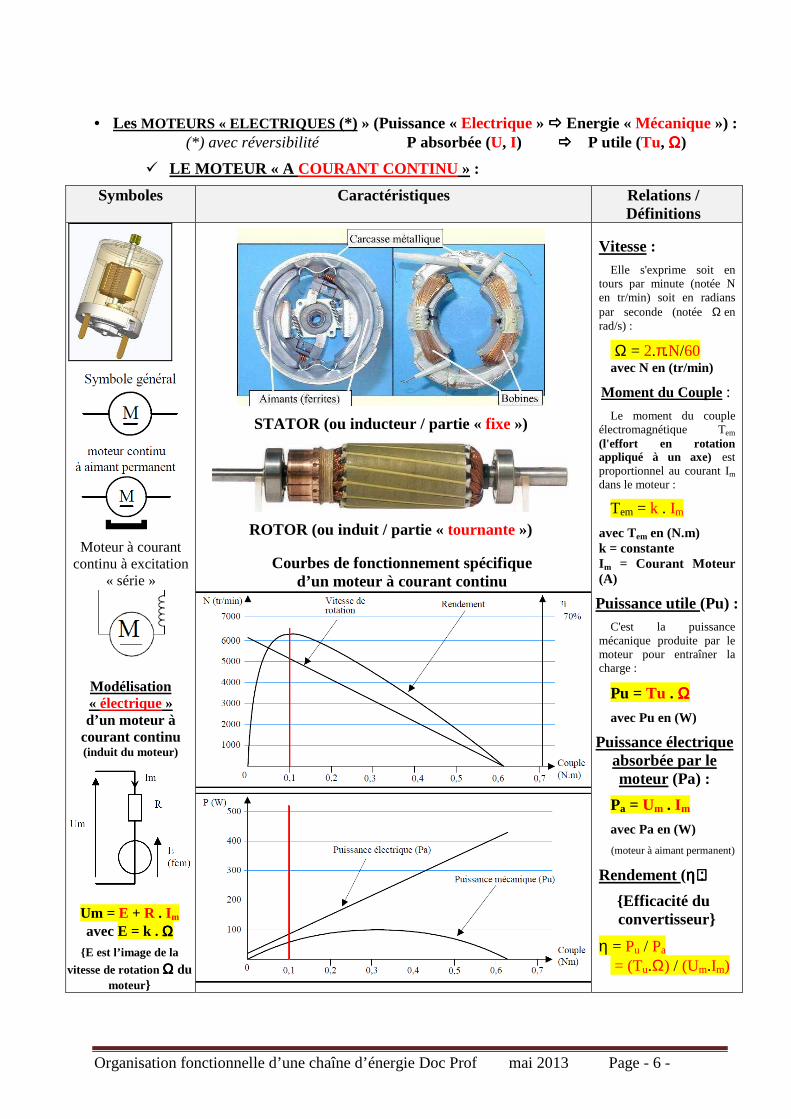
• Les MOTEURS « ELECTRIQUES (*) » (Puissance « Electrique » Energie « Mécanique ») : (*) avec réversibilité P absorbée (U, I ) P utile (Tu, ΩΩΩΩ)
LE MOTEUR « A COURANT CONTINU » :
Symboles Caractéristiques Relations / Définitions
Moteur à courant continu à excitation
« série »
Modélisation « électrique » d’un moteur à
courant continu (induit du moteur)
Um = E + R . Im avec E = k . ΩΩΩΩ
E est l’image de la
vitesse de rotation ΩΩΩΩ du moteur
Courbes de fonctionnement spécifique d’un moteur à courant continu
Vitesse :
Elle s'exprime soit en tours par minute (notée N en tr/min) soit en radians par seconde (notée Ω en rad/s) :
Ω = 2.π.N/60 avec N en (tr/min)
Moment du Couple :
Le moment du couple électromagnétique Tem (l'effort en rotation appliqué à un axe) est proportionnel au courant Im dans le moteur :
Tem = k . Im
avec Tem en (N.m) k = constante I m = Courant Moteur (A)
Puissance utile (Pu) :
C'est la puissance mécanique produite par le moteur pour entraîner la charge :
Pu = Tu . ΩΩΩΩ
avec Pu en (W)
Puissance électrique absorbée par le moteur (Pa) :
Pa = Um . Im
avec Pa en (W)
(moteur à aimant permanent)
Rendement (η) :η) :η) :η) :
Efficacité du convertisseur
η = Pu / Pa = (Tu.Ω) / (Um.Im)
STATOR (ou inducteur / partie « fixe »)
ROTOR (ou induit / partie « tournante »)
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 7 -
Deux propriétés importantes à retenir :
La tension d'alimentation agit sur la vitesse : E = = = = k.ΩΩΩΩ
On règle (ou l’on contrôle) la vitesse en ajustant la tension d'alimentation.
Le couple électromagnétique agit sur le courant : Tem = = = = k.I m
Lorsque le moteur est soumis à un moment de couple résistant au niveau du rotor, il consomme (ou absorbe) donc davantage de courant !
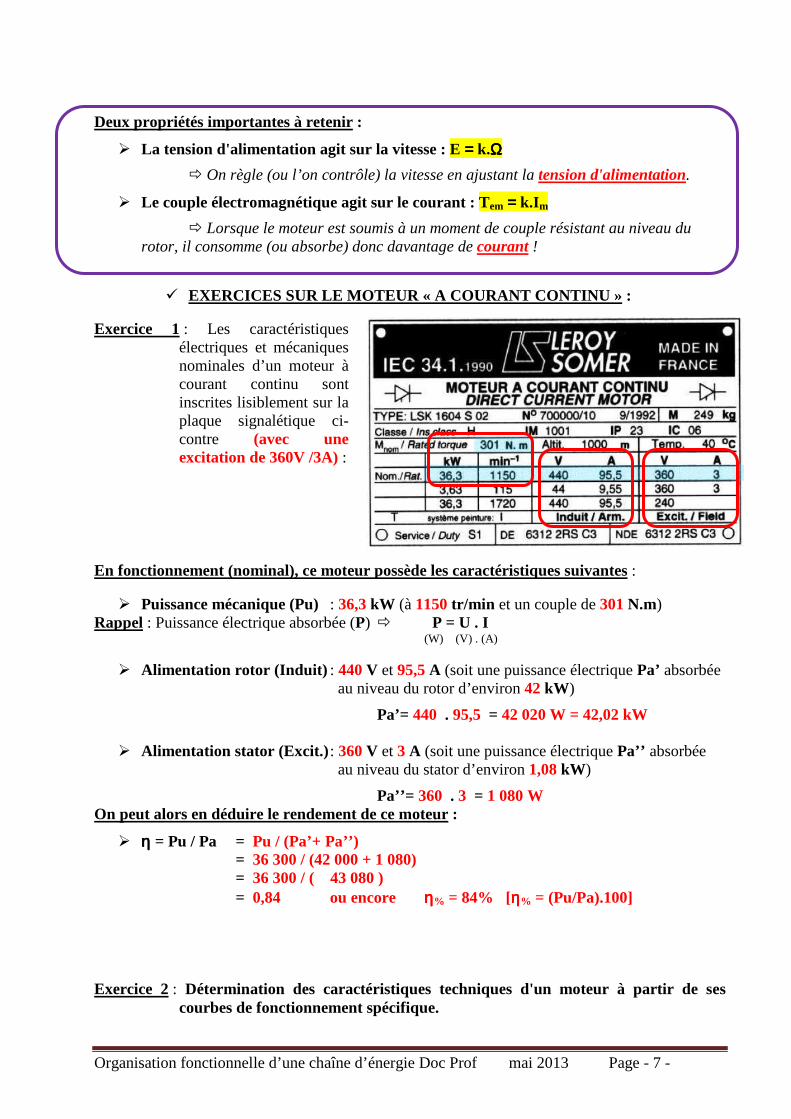
EXERCICES SUR LE MOTEUR « A COURANT CONTINU » : Exercice 1 : Les caractéristiques
électriques et mécaniques nominales d’un moteur à courant continu sont inscrites lisiblement sur la plaque signalétique ci-contre (avec une excitation de 360V /3A) :
En fonctionnement (nominal), ce moteur possède les caractéristiques suivantes :
Puissance mécanique (Pu) : 36,3 kW (à 1150 tr/min et un couple de 301 N.m) Rappel : Puissance électrique absorbée (P) P = U . I (W) (V) . (A)
Alimentation rotor (Induit) : 440 V et 95,5 A (soit une puissance électrique Pa’ absorbée au niveau du rotor d’environ 42 kW)
Pa’= 440 . 95,5 = 42 020 W = 42,02 kW
Alimentation stator (Excit.) : 360 V et 3 A (soit une puissance électrique Pa’’ absorbée au niveau du stator d’environ 1,08 kW)
Pa’’= 360 . 3 = 1 080 W On peut alors en déduire le rendement de ce moteur :
ηηηη = Pu / Pa = Pu / (Pa’+ Pa’’) = 36 300 / (42 000 + 1 080) = 36 300 / ( 43 080 ) = 0,84 ou encore ηηηη% = 84% [ηηηη% = (Pu/Pa).100]
Exercice 2 : Détermination des caractéristiques techniques d'un moteur à partir de ses
courbes de fonctionnement spécifique.
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 8 -
On souhaite déterminer les caractéristiques techniques principales du moteur à courant continu à partir des courbes de fonctionnement données page 6.
a/. CARACTÉRISTIQUE COUPLE-VITESSE :
Repérer sur la courbe la vitesse de rotation à vide No du moteur (lorsque ce dernier n’entraîne aucune charge, le couple est alors nul !).
No ≈≈≈≈ 6200 tr/min
Repérer sur la courbe le moment du couple de démarrage Tmax du moteur.
Tmax ≈≈≈≈ 0,62 N.m
b/. CARACTÉRISTIQUES NOMINALES DU MOTEUR (au rendem ent maximal) :
Repérer sur les courbes le point de fonctionnement nominal et compléter le tableau suivant en donnant la valeur nominale de chacune des caractéristiques.
Grandeurs Valeurs Vitesse de rotation (tr/min) 5100 tr/min
Couple utile (N.m) 0,1 N.m Puissance utile (W) 55 W
Puissance absorbée (W) 90 W Rendement (%) 62 %
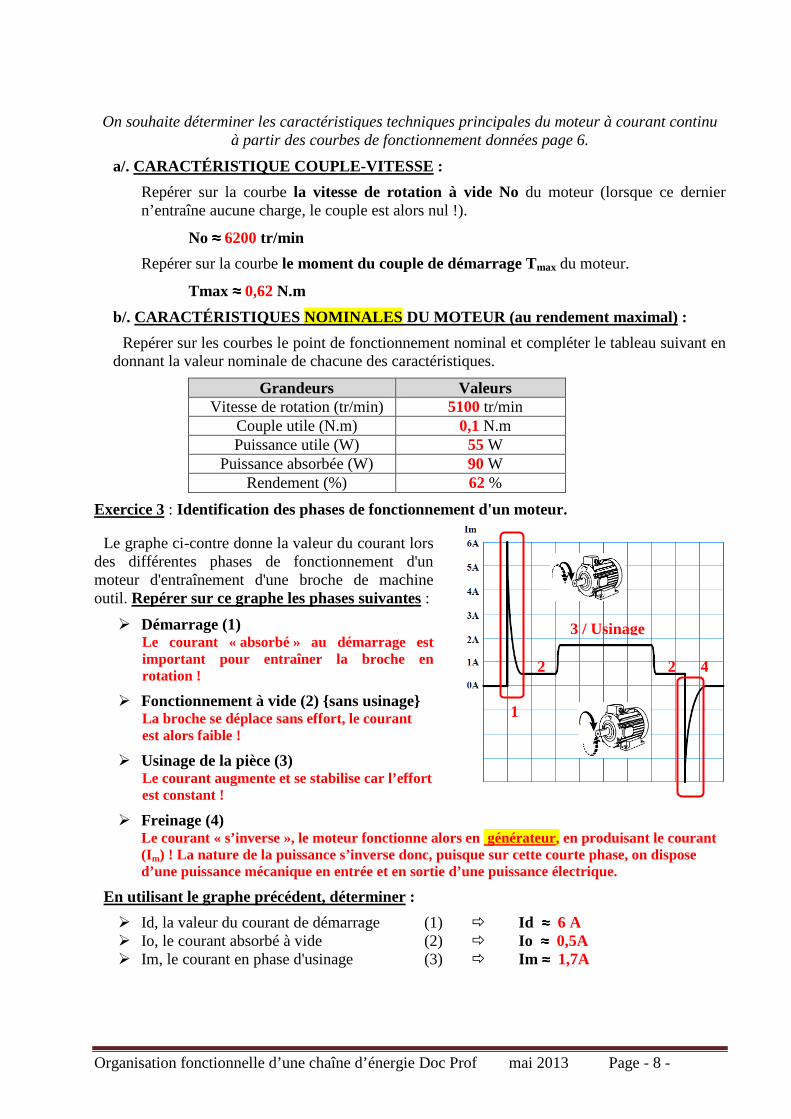
Exercice 3 : Identification des phases de fonctionnement d'un moteur.
Le graphe ci-contre donne la valeur du courant lors des différentes phases de fonctionnement d'un moteur d'entraînement d'une broche de machine outil. Repérer sur ce graphe les phases suivantes :
Démarrage (1) Le courant « absorbé » au démarrage est important pour entraîner la broche en rotation !
Fonctionnement à vide (2) sans usinage La broche se déplace sans effort, le courant est alors faible !
Usinage de la pièce (3) Le courant augmente et se stabilise car l’effort est constant !
Freinage (4) Le courant « s’inverse », le moteur fonctionne alors en générateur, en produisant le courant (I m) ! La nature de la puissance s’inverse donc, puisque sur cette courte phase, on dispose d’une puissance mécanique en entrée et en sortie d’une puissance électrique.
En utilisant le graphe précédent, déterminer :
Id, la valeur du courant de démarrage (1) Id ≈≈≈≈ 6 A Io, le courant absorbé à vide (2) Io ≈≈≈≈ 0,5A Im, le courant en phase d'usinage (3) Im ≈≈≈≈ 1,7A
1
2
3 / Usinage
2 4
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 9 -
En considérant une puissance mécanique utile (Pu) de 21,2W, en déduire le rendement (ηηηη%) de ce moteur sur la phase d’usinage ? On rappelle que ce moteur est alimenté sous une tension (Um) de 24V !
Rendement (ηηηη%) ηηηη% = [Pu/Pa] .100 ηηηη% = [21.2/(24*1.7)] .100 ηηηη% = 52%
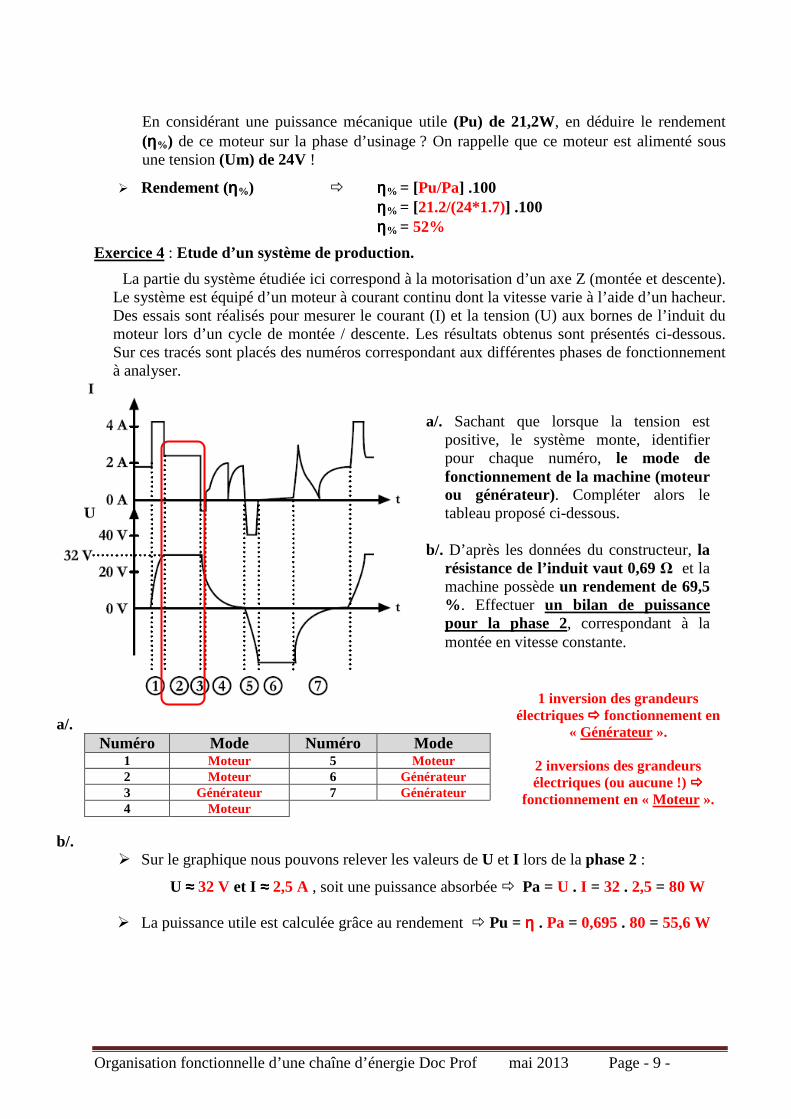
Exercice 4 : Etude d’un système de production.
La partie du système étudiée ici correspond à la motorisation d’un axe Z (montée et descente). Le système est équipé d’un moteur à courant continu dont la vitesse varie à l’aide d’un hacheur. Des essais sont réalisés pour mesurer le courant (I) et la tension (U) aux bornes de l’induit du moteur lors d’un cycle de montée / descente. Les résultats obtenus sont présentés ci-dessous. Sur ces tracés sont placés des numéros correspondant aux différentes phases de fonctionnement à analyser.
a/.
Numéro Mode Numéro Mode 1 Moteur 5 Moteur 2 Moteur 6 Générateur 3 Générateur 7 Générateur 4 Moteur
b/. Sur le graphique nous pouvons relever les valeurs de U et I lors de la phase 2 :
U ≈≈≈≈ 32 V et I ≈≈≈≈ 2,5 A , soit une puissance absorbée Pa = U . I = 32 . 2,5 = 80 W
La puissance utile est calculée grâce au rendement Pu = ηηηη . Pa = 0,695 . 80 = 55,6 W
a/. Sachant que lorsque la tension est positive, le système monte, identifier pour chaque numéro, le mode de fonctionnement de la machine (moteur ou générateur). Compléter alors le tableau proposé ci-dessous.
b/. D’après les données du constructeur, la
résistance de l’induit vaut 0,69 Ω et la machine possède un rendement de 69,5 % . Effectuer un bilan de puissance pour la phase 2, correspondant à la montée en vitesse constante.
1 inversion des grandeurs
électriques fonctionnement en « Générateur ».
2 inversions des grandeurs électriques (ou aucune !)
fonctionnement en « Moteur ».
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 10 -
Soit le bilan de puissance suivant pour la phase 2 :
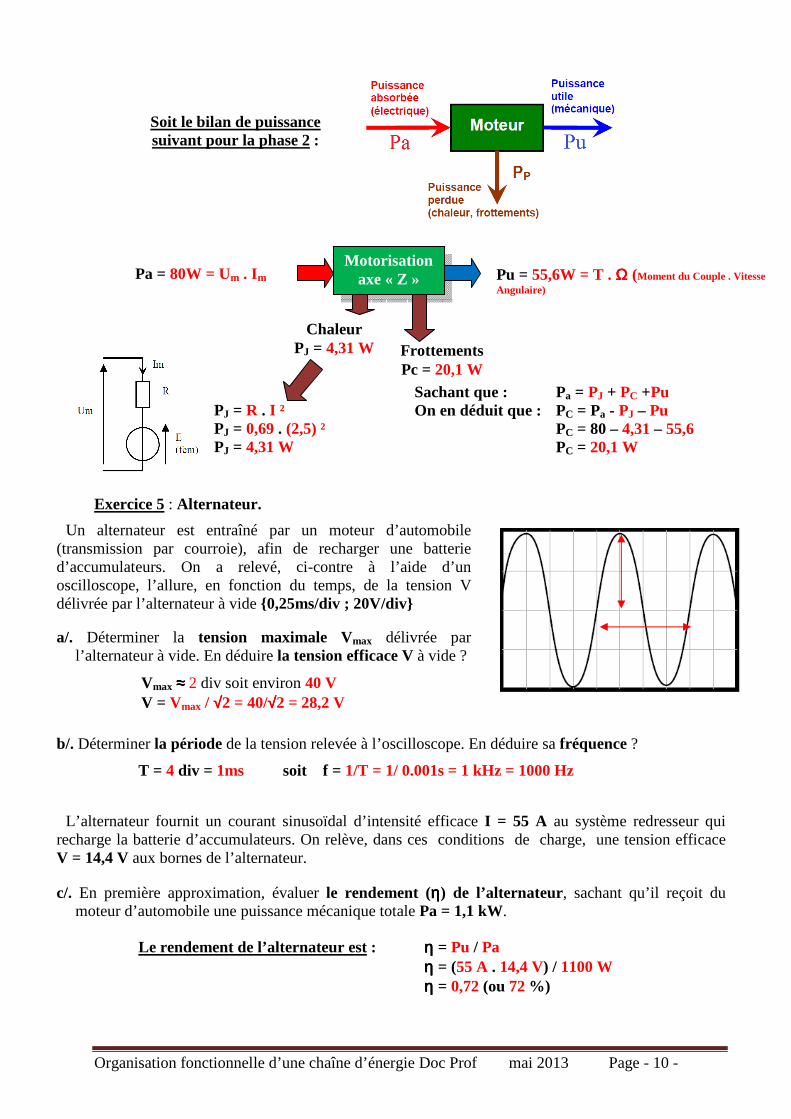
Exercice 5 : Alternateur.
Un alternateur est entraîné par un moteur d’automobile (transmission par courroie), afin de recharger une batterie d’accumulateurs. On a relevé, ci-contre à l’aide d’un oscilloscope, l’allure, en fonction du temps, de la tension V délivrée par l’alternateur à vide 0,25ms/div ; 20V/div
a/. Déterminer la tension maximale Vmax délivrée par l’alternateur à vide. En déduire la tension efficace V à vide ?
Vmax ≈≈≈≈ 2 div soit environ 40 V V = Vmax / √√√√2 = 40/√√√√2 = 28,2 V
b/. Déterminer la période de la tension relevée à l’oscilloscope. En déduire sa fréquence ?
T = 4 div = 1ms soit f = 1/T = 1/ 0.001s = 1 kHz = 1000 Hz
L’alternateur fournit un courant sinusoïdal d’intensité efficace I = 55 A au système redresseur qui recharge la batterie d’accumulateurs. On relève, dans ces conditions de charge, une tension efficace V = 14,4 V aux bornes de l’alternateur.
c/. En première approximation, évaluer le rendement (ηηηη) de l’alternateur, sachant qu’il reçoit du moteur d’automobile une puissance mécanique totale Pa = 1,1 kW.
Le rendement de l’alternateur est : ηηηη = Pu / Pa
ηηηη = (55 A . 14,4 V) / 1100 W ηηηη = 0,72 (ou 72 %)
Motorisation axe « Z » Pa = 80W = Um . Im Pu = 55,6W = T . ΩΩΩΩ (Moment du Couple . Vitesse
Angulaire)
Chaleur PJ = 4,31 W Frottements
Pc = 20,1 W
PJ = R . I ² PJ = 0,69 . (2,5) ² PJ = 4,31 W
Sachant que : Pa = PJ + PC +Pu On en déduit que : PC = Pa - PJ – Pu PC = 80 – 4,31 – 55,6 PC = 20,1 W
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 11 -
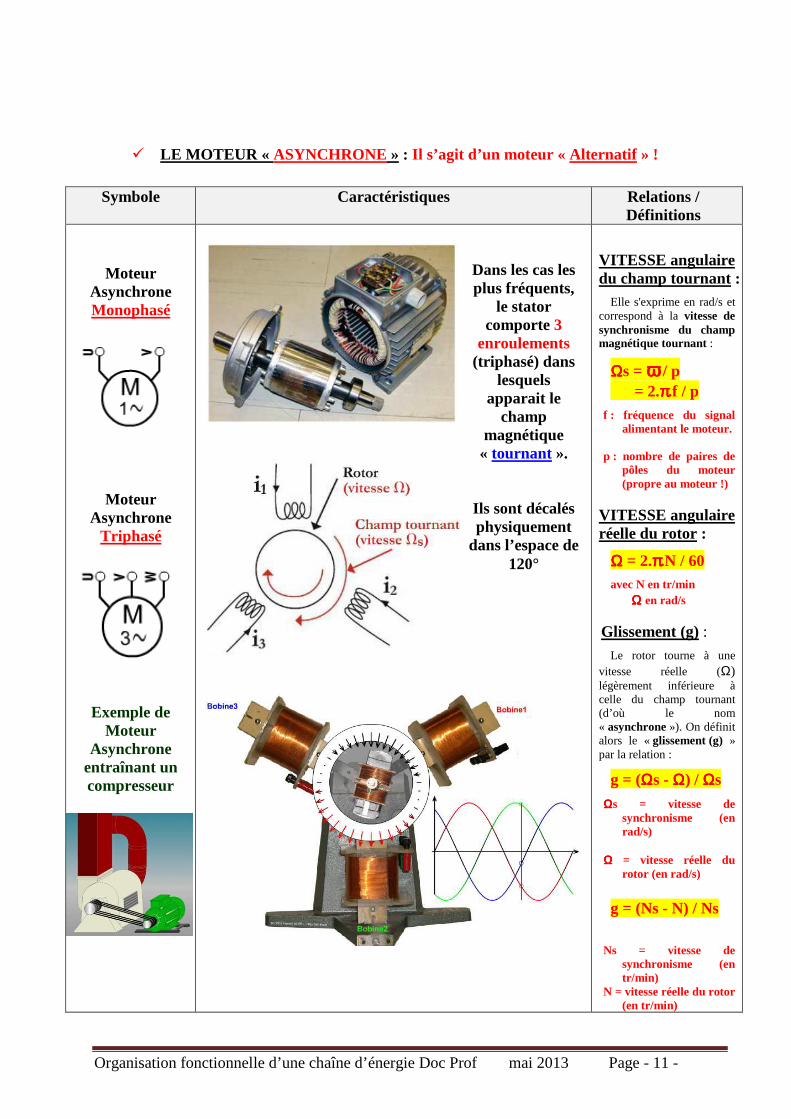
LE MOTEUR « ASYNCHRONE » : Il s’agit d’un moteur « Alternatif » !
Symbole Caractéristiques Relations / Définitions
Moteur Asynchrone Monophasé
Moteur
Asynchrone Triphasé
Exemple de Moteur
Asynchrone entraînant un compresseur
VITESSE angulaire du champ tournant :
Elle s'exprime en rad/s et correspond à la vitesse de synchronisme du champ magnétique tournant :
ΩΩΩΩs = ωωωω / p = 2.ππππ.f / p
f : fréquence du signal alimentant le moteur.
p : nombre de paires de
pôles du moteur (propre au moteur !)
VITESSE angulaire réelle du rotor :
ΩΩΩΩ = 2.ππππ.N / 60
avec N en tr/min ΩΩΩΩ en rad/s
Glissement (g) :
Le rotor tourne à une vitesse réelle (Ω) légèrement inférieure à celle du champ tournant (d’où le nom « asynchrone »). On définit alors le « glissement (g) » par la relation :
g = (ΩΩΩΩs - ΩΩΩΩ) / ΩΩΩΩs
ΩΩΩΩs = vitesse de synchronisme (en rad/s)
ΩΩΩΩ = vitesse réelle du
rotor (en rad/s)
g = (Ns - N) / Ns
Ns = vitesse de synchronisme (en tr/min)
N = vitesse réelle du rotor (en tr/min)
Dans les cas les plus fréquents,
le stator comporte 3
enroulements (triphasé) dans
lesquels apparait le
champ magnétique « tournant ».
Ils sont décalés physiquement
dans l’espace de 120°

Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 12 -
Deux propriétés importantes à retenir :
La vitesse de rotation (ΩΩΩΩ) est légèrement inférieure à la vitesse de synchronisme (ΩΩΩΩs)
ΩΩΩΩs = ωωωω / p = 2.ππππ.f / p
On règle alors la vitesse (Ωs) en ajustant la fréquence (f) à l’aide d’un « onduleur » (voir en page 2 de ce document)
On définit également le glissement (g) :
g = (ΩΩΩΩs - ΩΩΩΩ) / ΩΩΩΩs = (Ns - N) / Ns
Le moment du couple moteur (Tm) est proportionnel au glissement (g)
Tm = k . g
Lorsque le moteur subit un moment de couple résistant, la vitesse diminue légèrement !
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 13 -
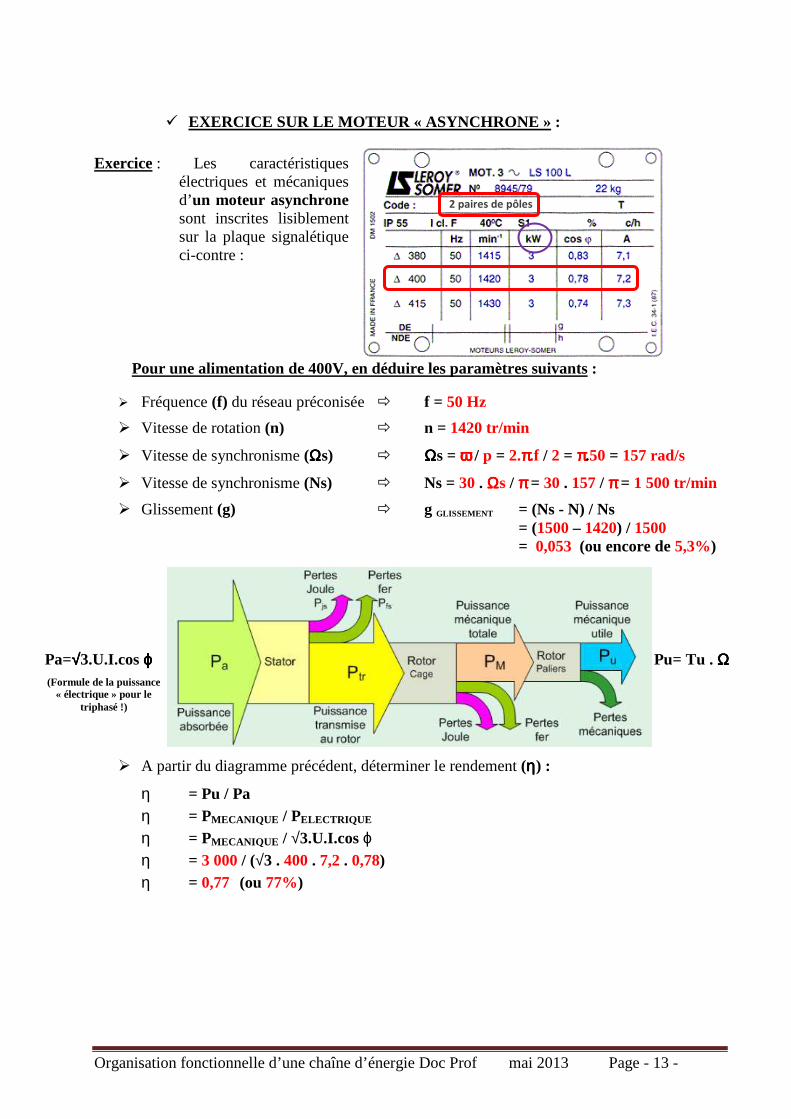
EXERCICE SUR LE MOTEUR « ASYNCHRONE » :
Exercice : Les caractéristiques électriques et mécaniques d’un moteur asynchrone sont inscrites lisiblement sur la plaque signalétique ci-contre :
Pour une alimentation de 400V, en déduire les paramètres suivants :
Fréquence (f) du réseau préconisée f = 50 Hz
Vitesse de rotation (n) n = 1420 tr/min
Vitesse de synchronisme (ΩΩΩΩs) ΩΩΩΩs = ωωωω / p = 2.ππππ.f / 2 = ππππ.50 = 157 rad/s
Vitesse de synchronisme (Ns) Ns = 30 . ΩΩΩΩs / ππππ = 30 . 157 / ππππ = 1 500 tr/min
Glissement (g) g GLISSEMENT = (Ns - N) / Ns = (1500 – 1420) / 1500 = 0,053 (ou encore de 5,3%)
A partir du diagramme précédent, déterminer le rendement (ηηηη) :
η = Pu / Pa η = PMECANIQUE / PELECTRIQUE η = PMECANIQUE / √3.U.I.cos ϕ η = 3 000 / (√3 . 400 . 7,2 . 0,78) η = 0,77 (ou 77%)
2 paires de pôles
Pa=√√√√3.U.I.cos ϕϕϕϕ
(Formule de la puissance « électrique » pour le
triphasé !)
Pu= Tu . ΩΩΩΩ
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 14 -
EXEMPLES d’autres TECHNOLOGIES DE MOTEURS :
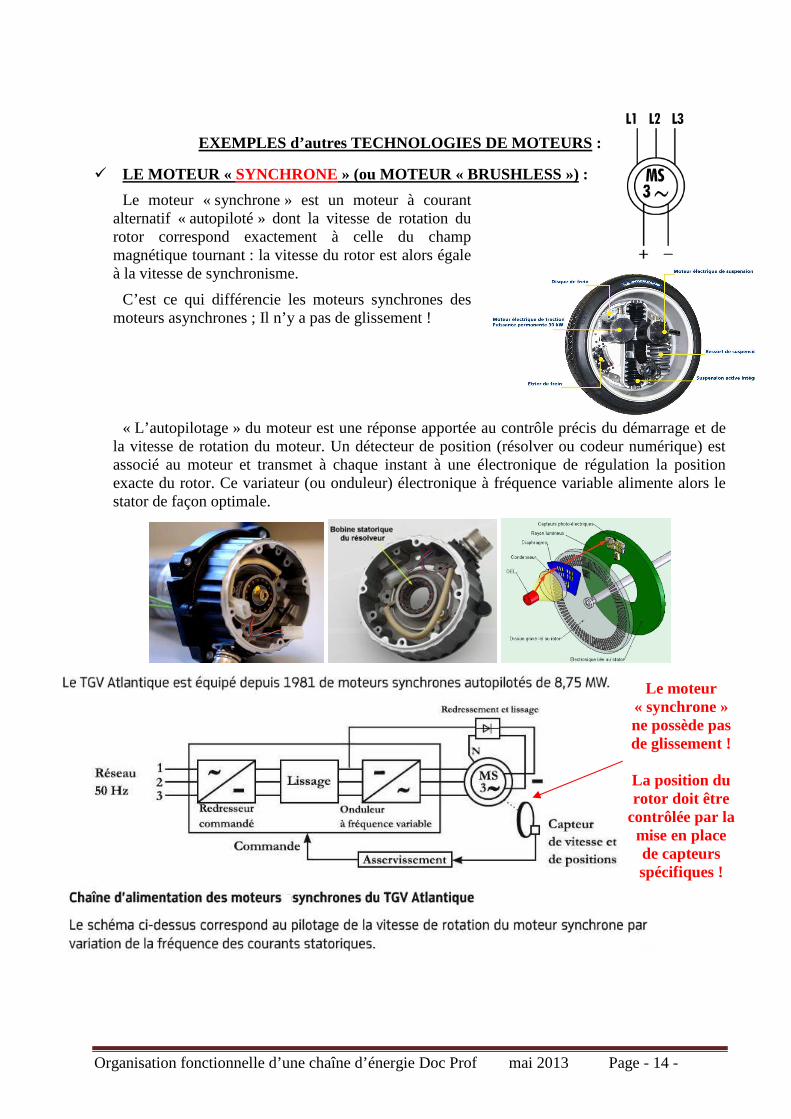
LE MOTEUR « SYNCHRONE » (ou MOTEUR « BRUSHLESS ») :
Le moteur « synchrone » est un moteur à courant alternatif « autopiloté » dont la vitesse de rotation du rotor correspond exactement à celle du champ magnétique tournant : la vitesse du rotor est alors égale à la vitesse de synchronisme.
C’est ce qui différencie les moteurs synchrones des moteurs asynchrones ; Il n’y a pas de glissement !
« L’autopilotage » du moteur est une réponse apportée au contrôle précis du démarrage et de la vitesse de rotation du moteur. Un détecteur de position (résolver ou codeur numérique) est associé au moteur et transmet à chaque instant à une électronique de régulation la position exacte du rotor. Ce variateur (ou onduleur) électronique à fréquence variable alimente alors le stator de façon optimale.
Le moteur « synchrone » ne possède pas de glissement !
La position du rotor doit être
contrôlée par la mise en place de capteurs spécifiques !
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 15 -
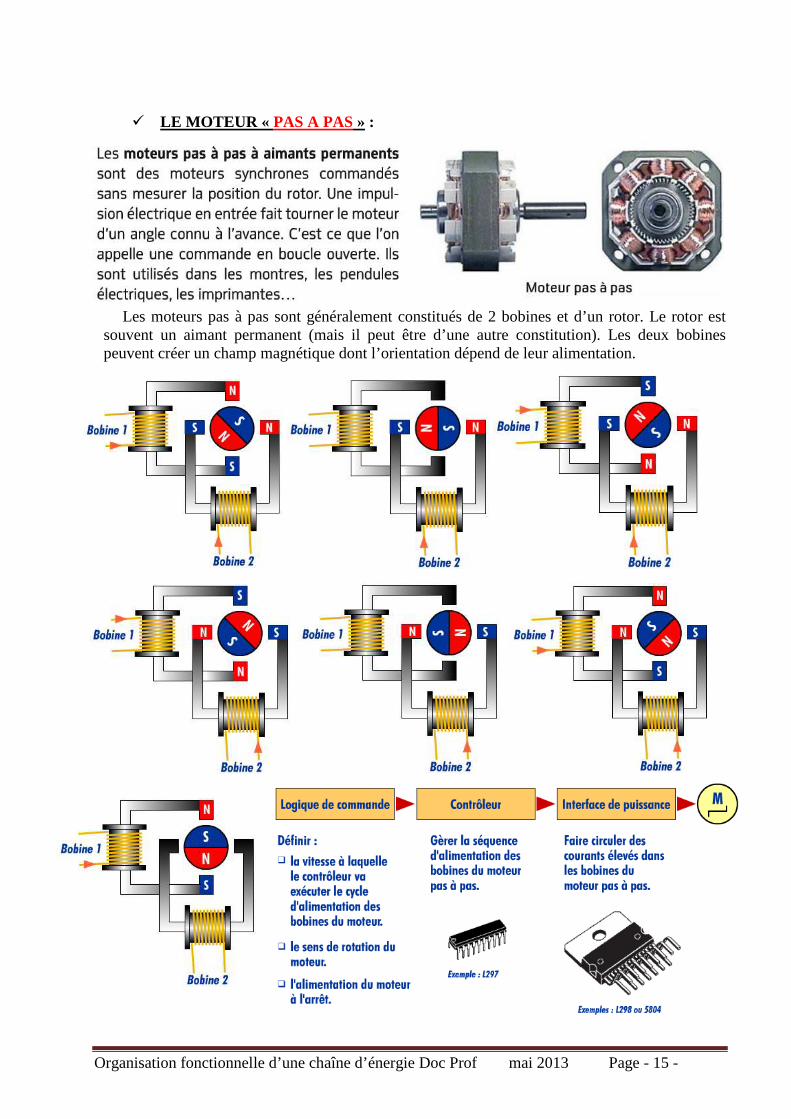
LE MOTEUR « PAS A PAS » :
Les moteurs pas à pas sont généralement constitués de 2 bobines et d’un rotor. Le rotor est
souvent un aimant permanent (mais il peut être d’une autre constitution). Les deux bobines peuvent créer un champ magnétique dont l’orientation dépend de leur alimentation.
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 16 -
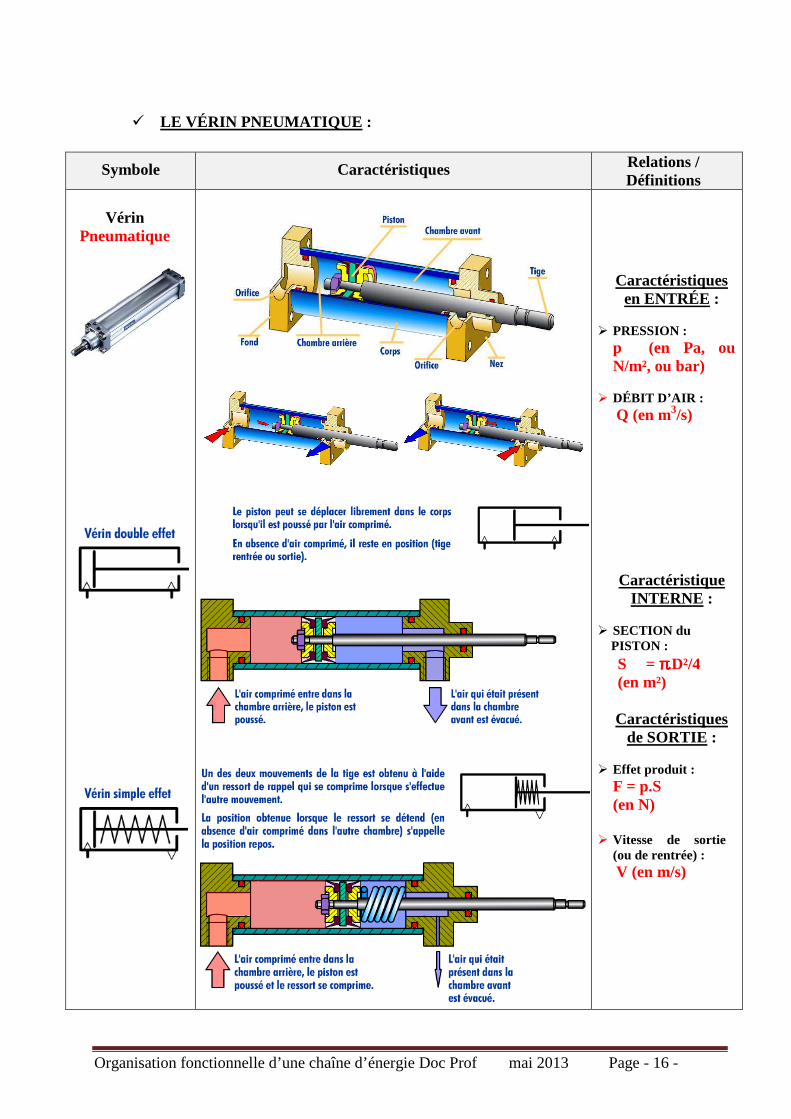
LE VÉRIN PNEUMATIQUE :
Symbole
Caractéristiques Relations / Définitions
Vérin
Pneumatique
Caractéristiques en ENTRÉE :
PRESSION :
p (en Pa, ou N/m², ou bar)
DÉBIT D’AIR : Q (en m3/s)
Caractéristique INTERNE :
SECTION du PISTON :
S = ππππ.D²/4 (en m²)
Caractéristiques de SORTIE :
Effet produit :
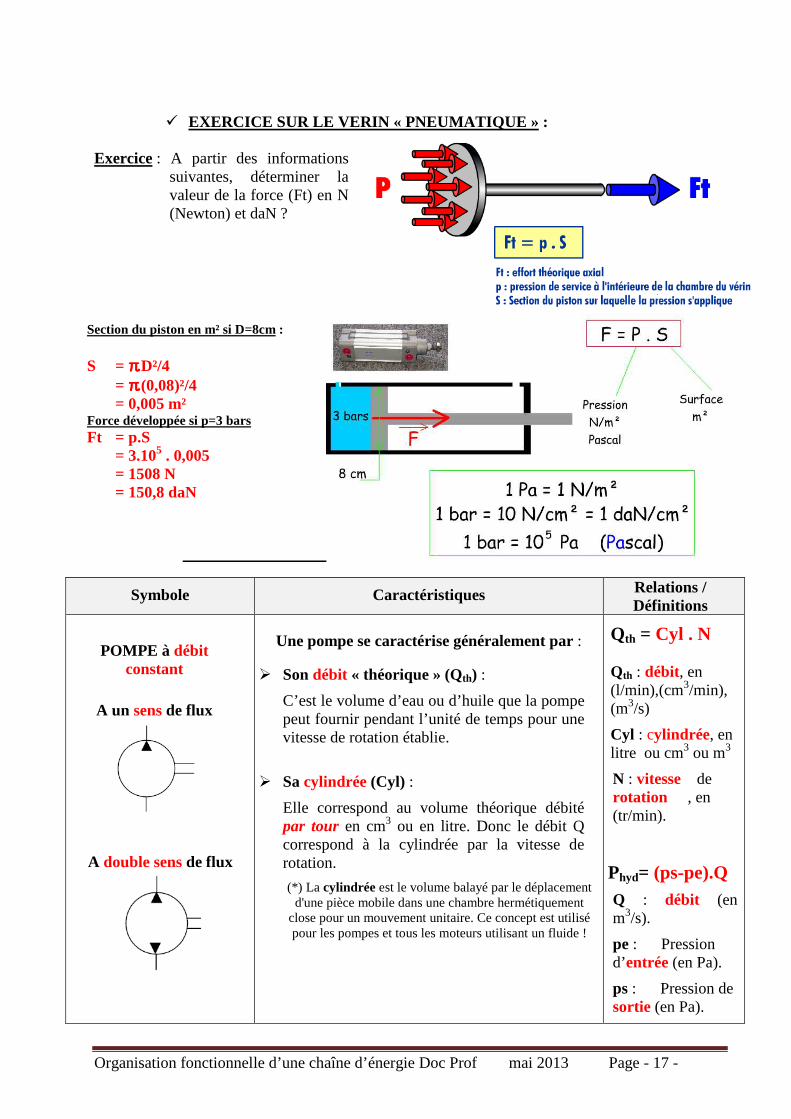
F = p.S (en N)
Vitesse de sortie (ou de rentrée) : V (en m/s)
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 17 -
EXERCICE SUR LE VERIN « PNEUMATIQUE » : Exercice : A partir des informations
suivantes, déterminer la valeur de la force (Ft) en N (Newton) et daN ?
Symbole
Caractéristiques Relations / Définitions
POMPE à débit
constant
A un sens de flux
A double sens de flux
Une pompe se caractérise généralement par :
Son débit « théorique » (Qth) :
C’est le volume d’eau ou d’huile que la pompe peut fournir pendant l’unité de temps pour une vitesse de rotation établie.
Sa cylindrée (Cyl) :
Elle correspond au volume théorique débité par tour en cm3 ou en litre. Donc le débit Q correspond à la cylindrée par la vitesse de rotation.
(*) La cylindrée est le volume balayé par le déplacement d'une pièce mobile dans une chambre hermétiquement
close pour un mouvement unitaire. Ce concept est utilisé pour les pompes et tous les moteurs utilisant un fluide !
Qth = Cyl . N Qth : débit, en (l/min),(cm3/min), (m3/s)
Cyl : cylindrée, en litre ou cm3 ou m3
N : vitesse de rotation , en (tr/min).
Phyd= (ps-pe).Q
Q : débit (en m3/s).
pe : Pression d’entrée (en Pa).
ps : Pression de sortie (en Pa).
Section du piston en m² si D=8cm :
S = ππππ.D²/4 = ππππ.(0,08)²/4 = 0,005 m² Force développée si p=3 bars Ft = p.S = 3.105 . 0,005 = 1508 N = 150,8 daN
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 18 -
POMPE à débit
variable ou cylindrée (*) variable
A un sens de flux
A double sens de flux
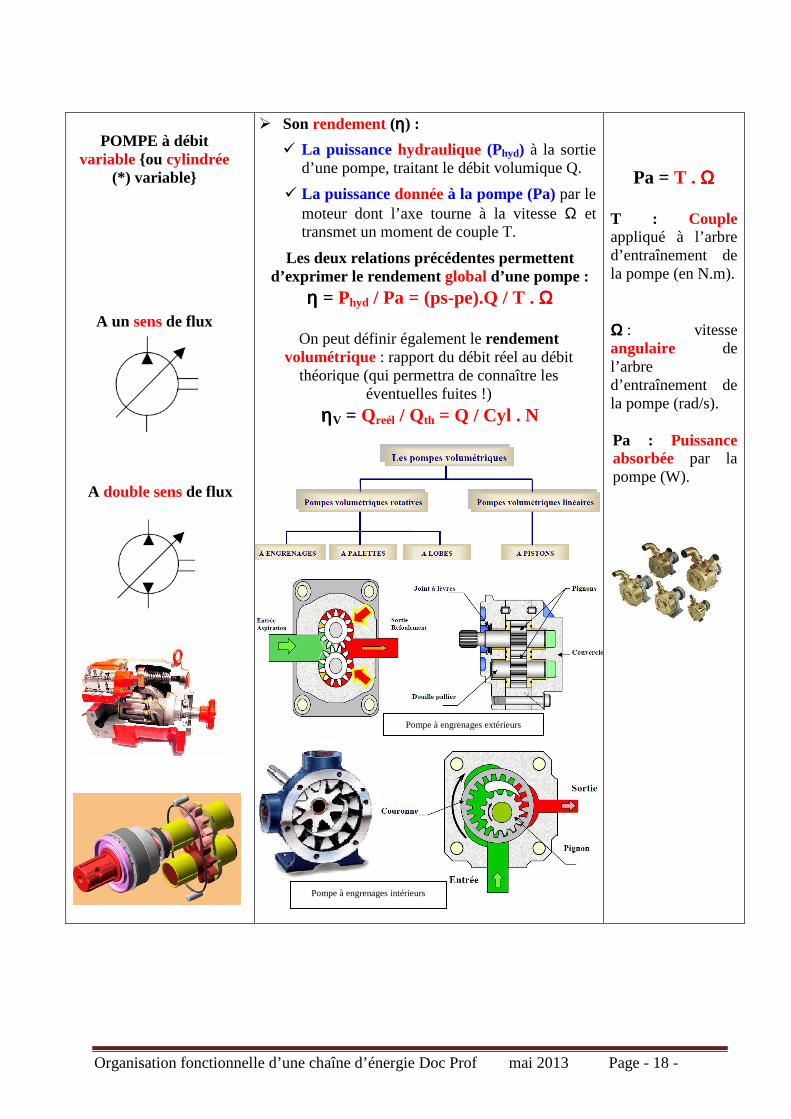
Son rendement (ηηηη) :
La puissance hydraulique (Phyd) à la sortie d’une pompe, traitant le débit volumique Q.
La puissance donnée à la pompe (Pa) par le moteur dont l’axe tourne à la vitesse Ω et transmet un moment de couple T.
Les deux relations précédentes permettent d’exprimer le rendement global d’une pompe :
ηηηη = Phyd / Pa = (ps-pe).Q / T . ΩΩΩΩ
On peut définir également le rendement volumétrique : rapport du débit réel au débit
théorique (qui permettra de connaître les éventuelles fuites !)
ηηηηV = Qreél / Qth = Q / Cyl . N
Pa = T . ΩΩΩΩ
T : Couple appliqué à l’arbre d’entraînement de la pompe (en N.m). ΩΩΩΩ : vitesse angulaire de l’arbre d’entraînement de la pompe (rad/s). Pa : Puissance absorbée par la pompe (W).
Pompe à engrenages extérieurs
Pompe à engrenages intérieurs
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 19 -
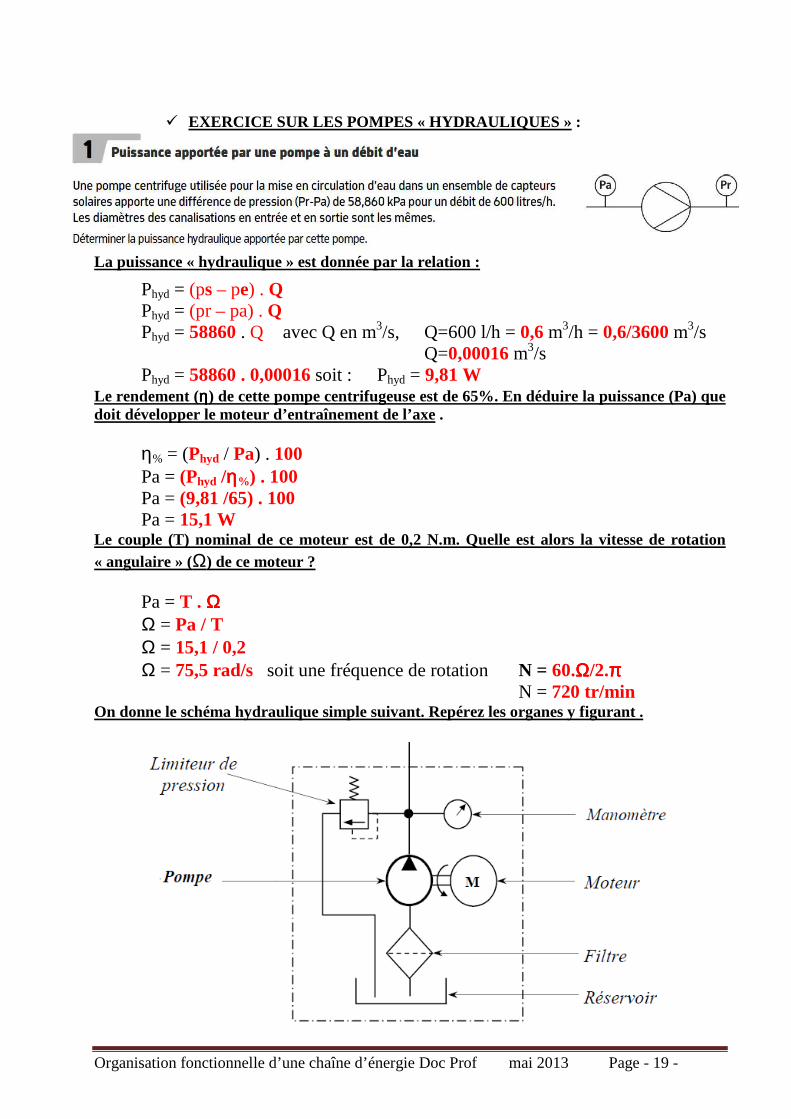
EXERCICE SUR LES POMPES « HYDRAULIQUES » :
La puissance « hydraulique » est donnée par la relation :
Phyd = (ps – pe) . Q Phyd = (pr – pa) . Q Phyd = 58860 . Q avec Q en m3/s, Q=600 l/h = 0,6 m3/h = 0,6/3600 m3/s Q=0,00016 m3/s Phyd = 58860 . 0,00016 soit : Phyd = 9,81 W Le rendement (ηηηη) de cette pompe centrifugeuse est de 65%. En déduire la puissance (Pa) que doit développer le moteur d’entraînement de l’axe . η% = (Phyd / Pa) . 100
Pa = (Phyd /ηηηη%) . 100 Pa = (9,81 /65) . 100 Pa = 15,1 W Le couple (T) nominal de ce moteur est de 0,2 N.m. Quelle est alors la vitesse de rotation « angulaire » (Ω) de ce moteur ?
Pa = T . ΩΩΩΩ Ω = Pa / T Ω = 15,1 / 0,2 Ω = 75,5 rad/s soit une fréquence de rotation N = 60.ΩΩΩΩ/2.ππππ N = 720 tr/min
On donne le schéma hydraulique simple suivant. Repérez les organes y figurant .
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 20 -
5/. Fonction « ADAPTER & TRANSMETTRE » :
L’énergie doit être transmise jusqu’à « l’effecteur (*) ». C’est le rôle des « adaptateurs & transmetteurs » d’énergie. On parle alors de « transformation de mouvement » !
(*) Dispositif technique local agissant directement sur la matière d’œuvre d’un système global (outil). Les effecteurs réalisent une opération ou produisent un effet !
5.1/. Généralités :
Il existe deux types de mouvements élémentaires :
La translation, La rotation .
A noter que tous les mouvements ne sont qu’association ou combinaison des deux ! Une transformation de mouvement se caractérise par une différence entre le mouvement
moteur et le mouvement récepteur. Cette différence peut être simple ou multiple parmi les suivantes :
Nature du mouvement. Direction du mouvement. Sens du mouvement. Vitesse du mouvement.
5.2/. Principales transformations de mouvements :
5.2.1/. « Rotation en Rotation » :
Particularités : Les mouvements peuvent être d’axes parallèles, perpendiculaires, quelconques. Les axes peuvent être concourants ou non !
Principaux types :
Les « Engrenages »
Caractéristiques Représentation /
Définition
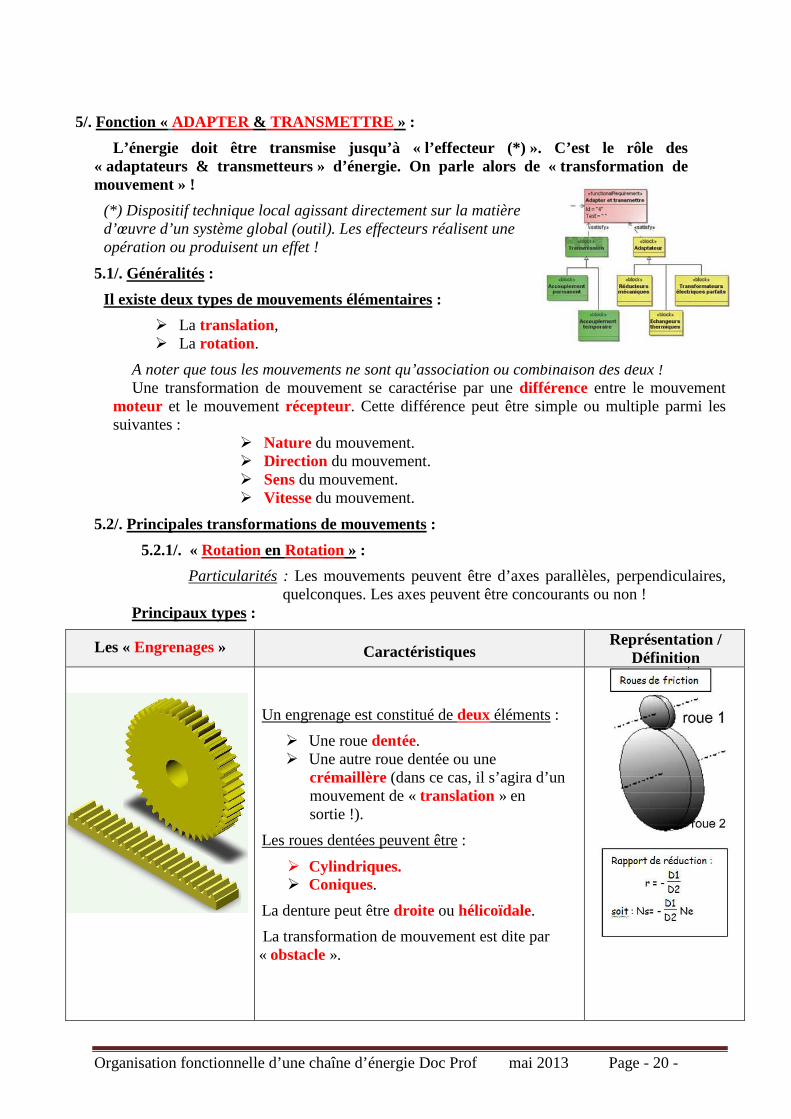
Un engrenage est constitué de deux éléments :
Une roue dentée. Une autre roue dentée ou une
crémaillère (dans ce cas, il s’agira d’un mouvement de « translation » en sortie !).
Les roues dentées peuvent être :
Cylindriques. Coniques.
La denture peut être droite ou hélicoïdale.
La transformation de mouvement est dite par « obstacle ».
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 21 -
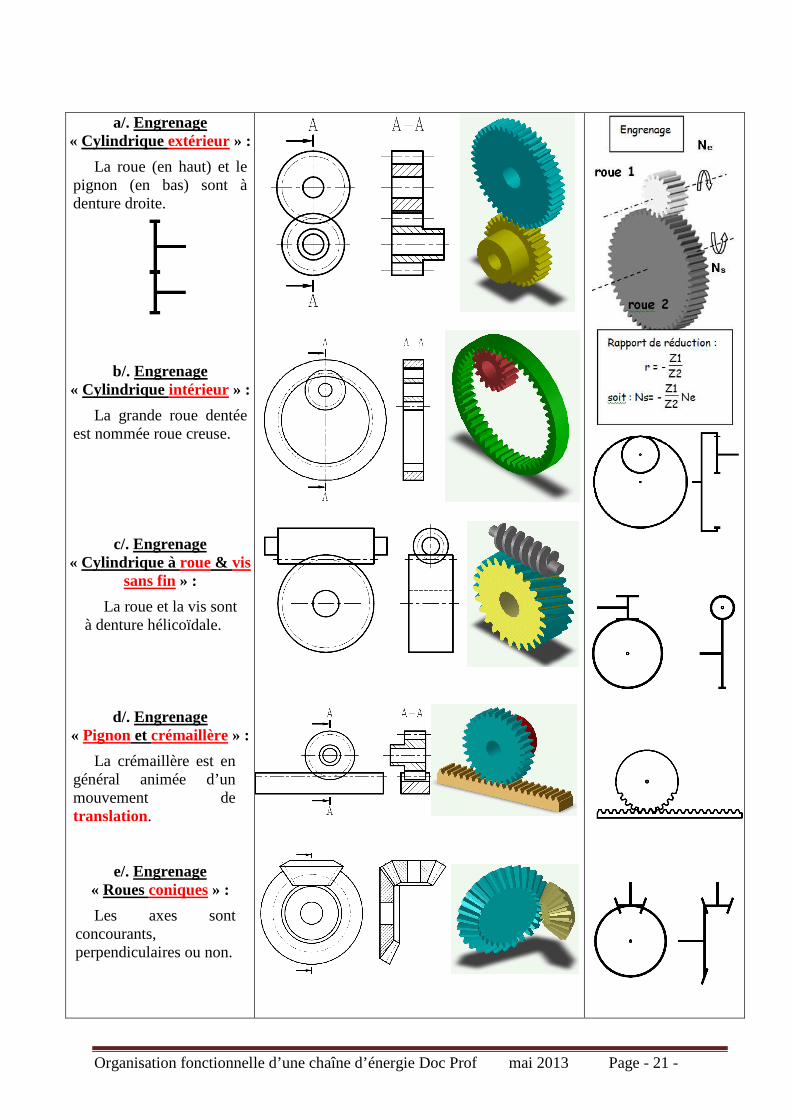
a/. Engrenage « Cylindrique extérieur » :
La roue (en haut) et le pignon (en bas) sont à denture droite.
b/. Engrenage « Cylindrique intérieur » :
La grande roue dentée est nommée roue creuse.
c/. Engrenage « Cylindrique à roue & vis
sans fin » :
La roue et la vis sont à denture hélicoïdale.
d/. Engrenage « Pignon et crémaillère » :
La crémaillère est en général animée d’un mouvement de translation.
e/. Engrenage « Roues coniques » :
Les axes sont concourants, perpendiculaires ou non.
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 22 -
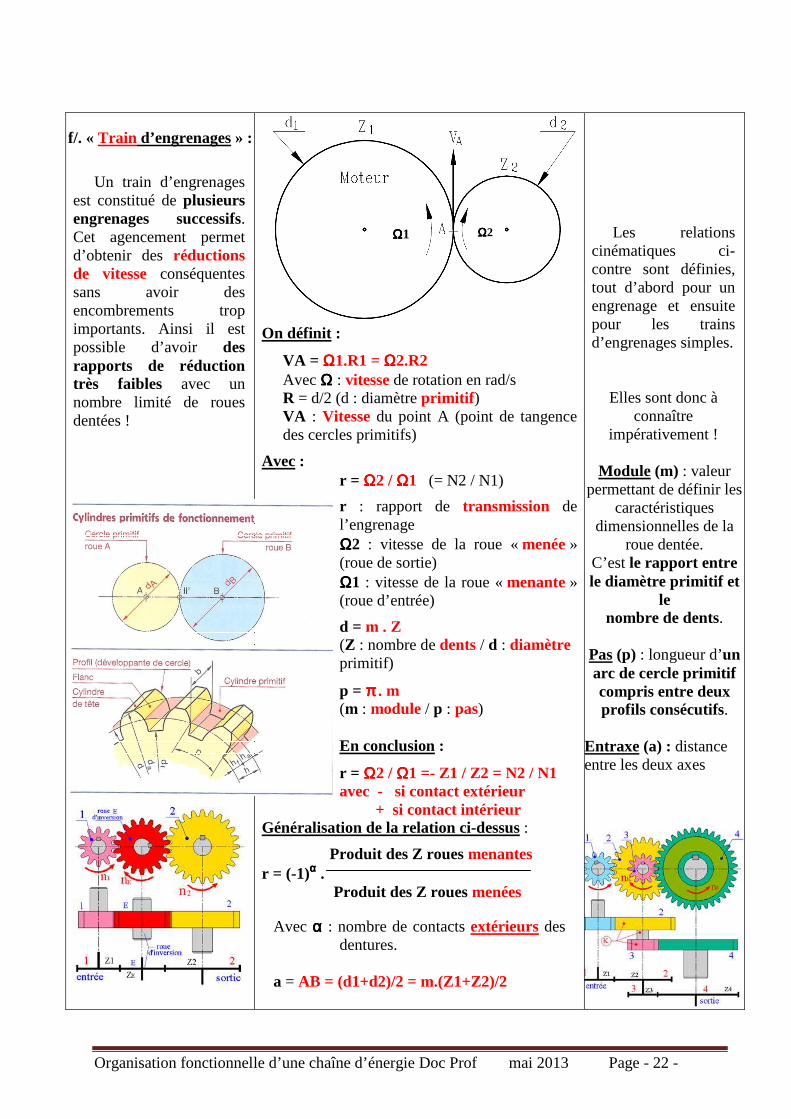
f/. « Train d’engrenages » :
Un train d’engrenages
est constitué de plusieurs engrenages successifs. Cet agencement permet d’obtenir des réductions de vitesse conséquentes sans avoir des encombrements trop importants. Ainsi il est possible d’avoir des rapports de réduction très faibles avec un nombre limité de roues dentées !
On définit :
VA = ΩΩΩΩ1.R1 = ΩΩΩΩ2.R2 Avec ΩΩΩΩ : vitesse de rotation en rad/s R = d/2 (d : diamètre primitif ) VA : Vitesse du point A (point de tangence des cercles primitifs)
Avec : r = ΩΩΩΩ2 / ΩΩΩΩ1 (= N2 / N1)
r : rapport de transmission de l’engrenage ΩΩΩΩ2 : vitesse de la roue « menée » (roue de sortie) ΩΩΩΩ1 : vitesse de la roue « menante » (roue d’entrée)
d = m . Z (Z : nombre de dents / d : diamètre primitif)
p = ππππ . m (m : module / p : pas) En conclusion :
r = ΩΩΩΩ2 / ΩΩΩΩ1 =- Z1 / Z2 = N2 / N1 avec - si contact extérieur + si contact intérieur
Généralisation de la relation ci-dessus :
Produit des Z roues menantes r = (-1)αααα . Produit des Z roues menées
Avec αααα : nombre de contacts extérieurs des dentures.
a = AB = (d1+d2)/2 = m.(Z1+Z2)/2
Les relations
cinématiques ci-contre sont définies, tout d’abord pour un engrenage et ensuite pour les trains d’engrenages simples.
Elles sont donc à
connaître impérativement !
Module (m) : valeur
permettant de définir les caractéristiques
dimensionnelles de la roue dentée.
C’est le rapport entre le diamètre primitif et
le nombre de dents.
Pas (p) : longueur d’un arc de cercle primitif compris entre deux profils consécutifs.
Entraxe (a) : distance entre les deux axes
ΩΩΩΩ2 ΩΩΩΩ1
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 23 -
EXERCICES SUR LES « ENGRENAGES » :
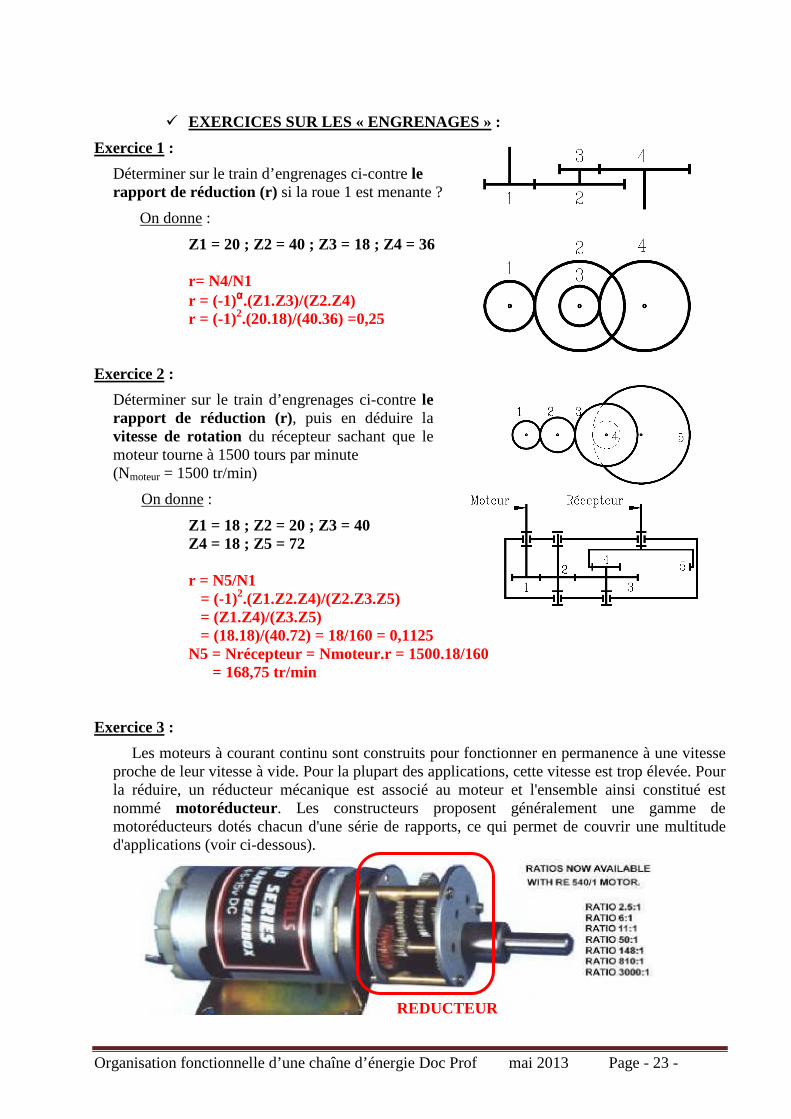
Exercice 1 :
Déterminer sur le train d’engrenages ci-contre le rapport de réduction (r) si la roue 1 est menante ?
On donne :
Z1 = 20 ; Z2 = 40 ; Z3 = 18 ; Z4 = 36 r= N4/N1 r = (-1)αααα.(Z1.Z3)/(Z2.Z4) r = (-1)2.(20.18)/(40.36) =0,25
Exercice 2 :
Déterminer sur le train d’engrenages ci-contre le rapport de réduction (r), puis en déduire la vitesse de rotation du récepteur sachant que le moteur tourne à 1500 tours par minute (Nmoteur = 1500 tr/min)
On donne :
Z1 = 18 ; Z2 = 20 ; Z3 = 40 Z4 = 18 ; Z5 = 72 r = N5/N1 = (-1)2.(Z1.Z2.Z4)/(Z2.Z3.Z5) = (Z1.Z4)/(Z3.Z5) = (18.18)/(40.72) = 18/160 = 0,1125 N5 = Nrécepteur = Nmoteur.r = 1500.18/160 = 168,75 tr/min
Exercice 3 :
Les moteurs à courant continu sont construits pour fonctionner en permanence à une vitesse proche de leur vitesse à vide. Pour la plupart des applications, cette vitesse est trop élevée. Pour la réduire, un réducteur mécanique est associé au moteur et l'ensemble ainsi constitué est nommé motoréducteur. Les constructeurs proposent généralement une gamme de motoréducteurs dotés chacun d'une série de rapports, ce qui permet de couvrir une multitude d'applications (voir ci-dessous).
REDUCTEUR
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 24 -
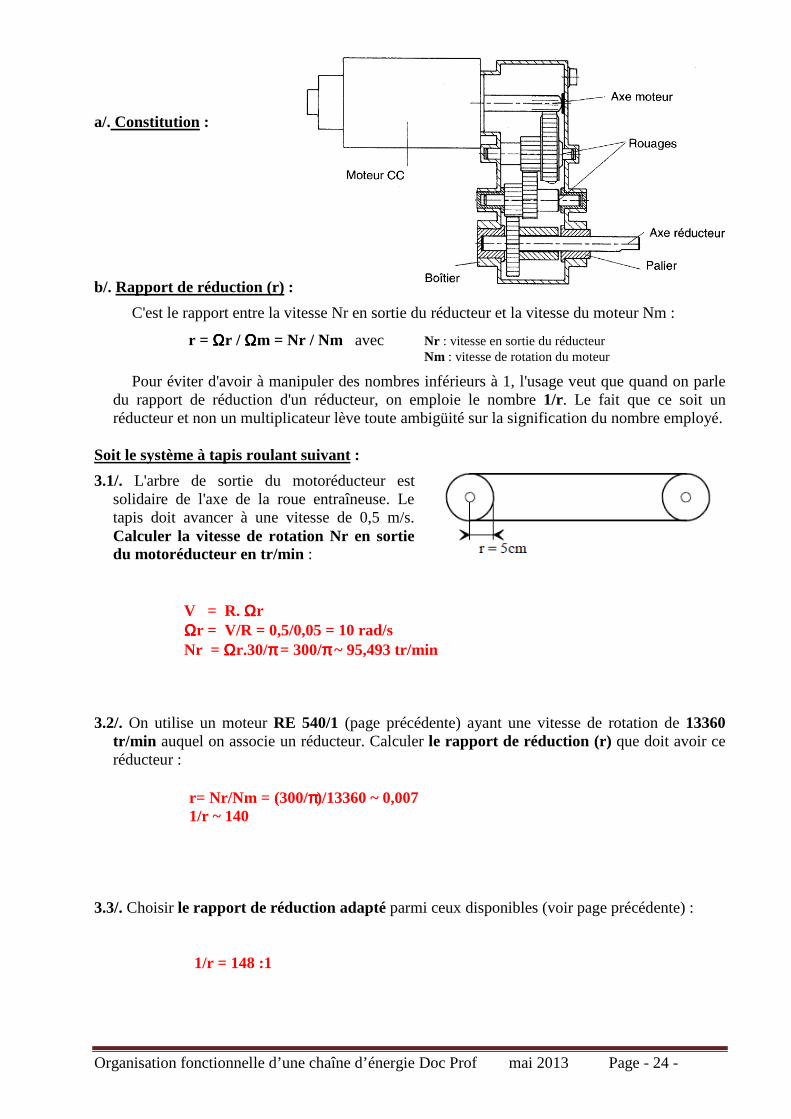
a/. Constitution :
b/. Rapport de réduction (r) :
C'est le rapport entre la vitesse Nr en sortie du réducteur et la vitesse du moteur Nm :
r = ΩΩΩΩr / ΩΩΩΩm = Nr / Nm avec Nr : vitesse en sortie du réducteur Nm : vitesse de rotation du moteur
Pour éviter d'avoir à manipuler des nombres inférieurs à 1, l'usage veut que quand on parle du rapport de réduction d'un réducteur, on emploie le nombre 1/r. Le fait que ce soit un réducteur et non un multiplicateur lève toute ambigüité sur la signification du nombre employé.
Soit le système à tapis roulant suivant :
3.1/. L'arbre de sortie du motoréducteur est solidaire de l'axe de la roue entraîneuse. Le tapis doit avancer à une vitesse de 0,5 m/s. Calculer la vitesse de rotation Nr en sortie du motoréducteur en tr/min :
V = R. ΩΩΩΩr ΩΩΩΩr = V/R = 0,5/0,05 = 10 rad/s Nr = ΩΩΩΩr.30/ππππ = 300/ππππ ~ 95,493 tr/min 3.2/. On utilise un moteur RE 540/1 (page précédente) ayant une vitesse de rotation de 13360
tr/min auquel on associe un réducteur. Calculer le rapport de réduction (r) que doit avoir ce réducteur :
r= Nr/Nm = (300/ππππ)/13360 ~ 0,007 1/r ~ 140 3.3/. Choisir le rapport de réduction adapté parmi ceux disponibles (voir page précédente) : 1/r = 148 :1
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 25 -
Le système « Poulies/Courroie »
Caractéristiques Représentation /
Définition Courroie à section
trapézoïdale (*)
Courroie à section rectangulaire (*)
Courroie à section
circulaire (*)
Courroie et poulies
crantées
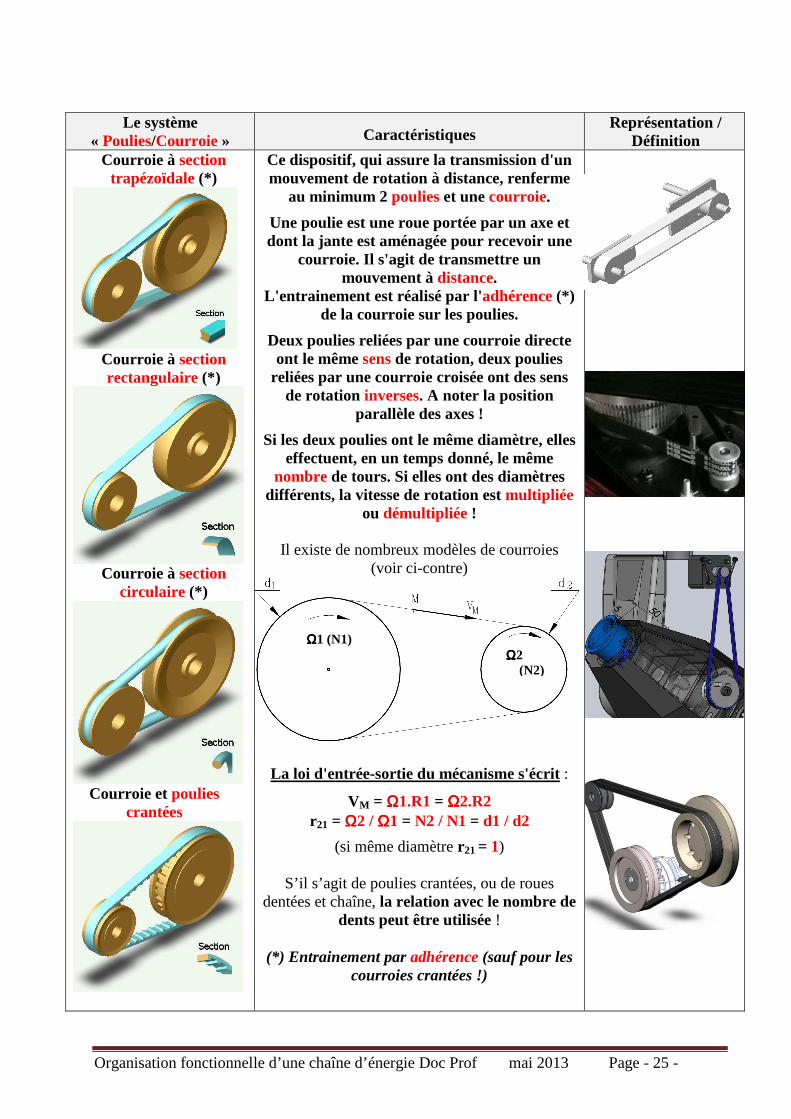
Ce dispositif, qui assure la transmission d'un mouvement de rotation à distance, renferme
au minimum 2 poulies et une courroie.
Une poulie est une roue portée par un axe et dont la jante est aménagée pour recevoir une
courroie. Il s'agit de transmettre un mouvement à distance.
L'entrainement est réalisé par l'adhérence (*) de la courroie sur les poulies.
Deux poulies reliées par une courroie directe ont le même sens de rotation, deux poulies
reliées par une courroie croisée ont des sens de rotation inverses. A noter la position
parallèle des axes !
Si les deux poulies ont le même diamètre, elles effectuent, en un temps donné, le même
nombre de tours. Si elles ont des diamètres différents, la vitesse de rotation est multipliée
ou démultipliée !
Il existe de nombreux modèles de courroies (voir ci-contre)
La loi d'entrée-sortie du mécanisme s'écrit :
VM = ΩΩΩΩ1.R1 = ΩΩΩΩ2.R2 r21 = ΩΩΩΩ2 / ΩΩΩΩ1 = N2 / N1 = d1 / d2
(si même diamètre r21 = 1)
S’il s’agit de poulies crantées, ou de roues dentées et chaîne, la relation avec le nombre de
dents peut être utilisée !
(*) Entrainement par adhérence (sauf pour les courroies crantées !)
ΩΩΩΩ1 (N1) ΩΩΩΩ2 (N2)
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 26 -
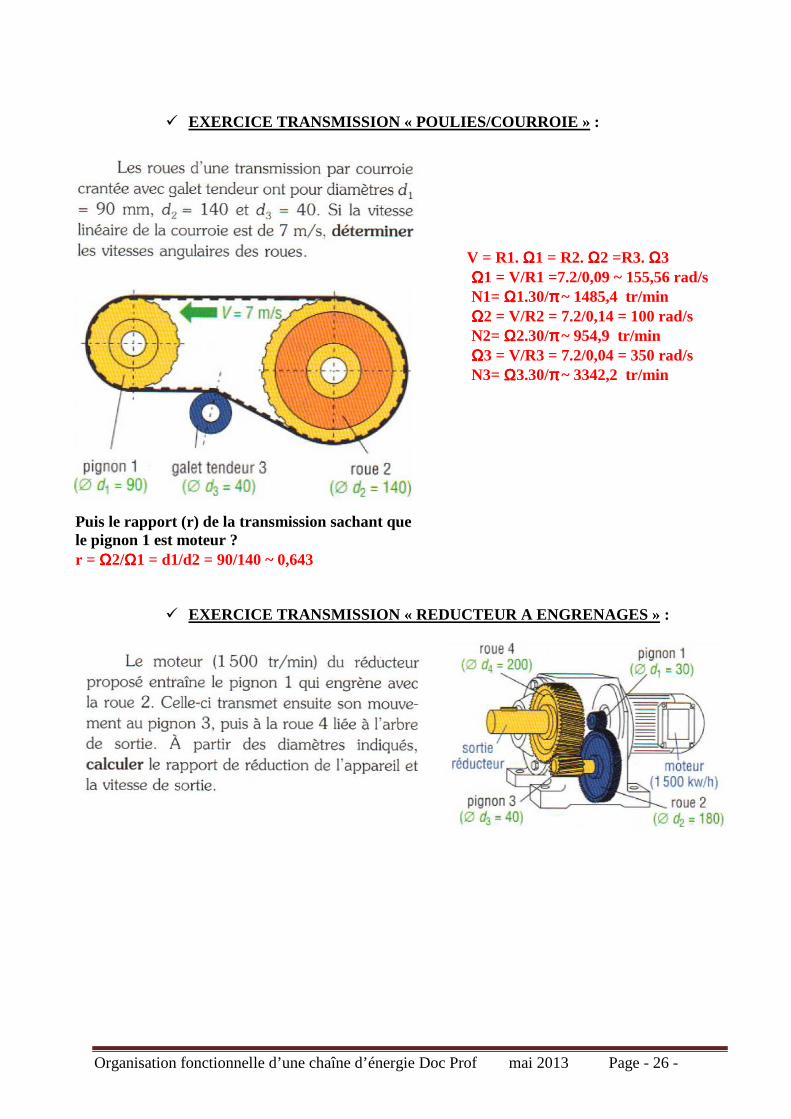
EXERCICE TRANSMISSION « POULIES/COURROIE » :
V = R1. ΩΩΩΩ1 = R2. ΩΩΩΩ2 =R3. ΩΩΩΩ3 ΩΩΩΩ1 = V/R1 =7.2/0,09 ~ 155,56 rad/s N1= ΩΩΩΩ1.30/ππππ ~ 1485,4 tr/min ΩΩΩΩ2 = V/R2 = 7.2/0,14 = 100 rad/s N2= ΩΩΩΩ2.30/ππππ ~ 954,9 tr/min ΩΩΩΩ3 = V/R3 = 7.2/0,04 = 350 rad/s N3= ΩΩΩΩ3.30/ππππ ~ 3342,2 tr/min
Puis le rapport (r) de la transmission sachant que le pignon 1 est moteur ? r = ΩΩΩΩ2/ΩΩΩΩ1 = d1/d2 = 90/140 ~ 0,643
EXERCICE TRANSMISSION « REDUCTEUR A ENGRENAGES » :
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 27 -
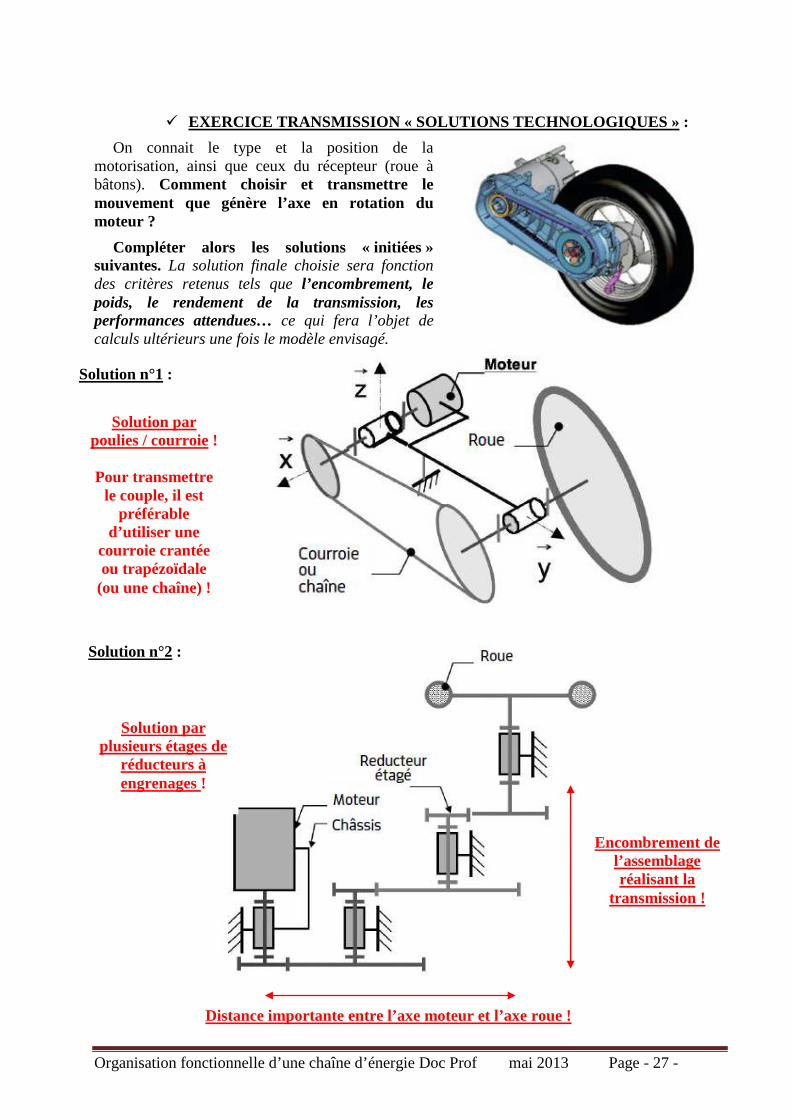
EXERCICE TRANSMISSION « SOLUTIONS TECHNOLOGIQUES » :
On connait le type et la position de la motorisation, ainsi que ceux du récepteur (roue à bâtons). Comment choisir et transmettre le mouvement que génère l’axe en rotation du moteur ?
Compléter alors les solutions « initiées » suivantes. La solution finale choisie sera fonction des critères retenus tels que l’encombrement, le poids, le rendement de la transmission, les performances attendues… ce qui fera l’objet de calculs ultérieurs une fois le modèle envisagé.
Solution n°1 :
Solution n°2 :
Solution par poulies / courroie !
Pour transmettre
le couple, il est préférable
d’utiliser une courroie crantée ou trapézoïdale
(ou une chaîne) !
Solution par plusieurs étages de
réducteurs à engrenages !
Encombrement de l’assemblage réalisant la
transmission !
Distance importante entre l’axe moteur et l’axe roue !
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 28 -
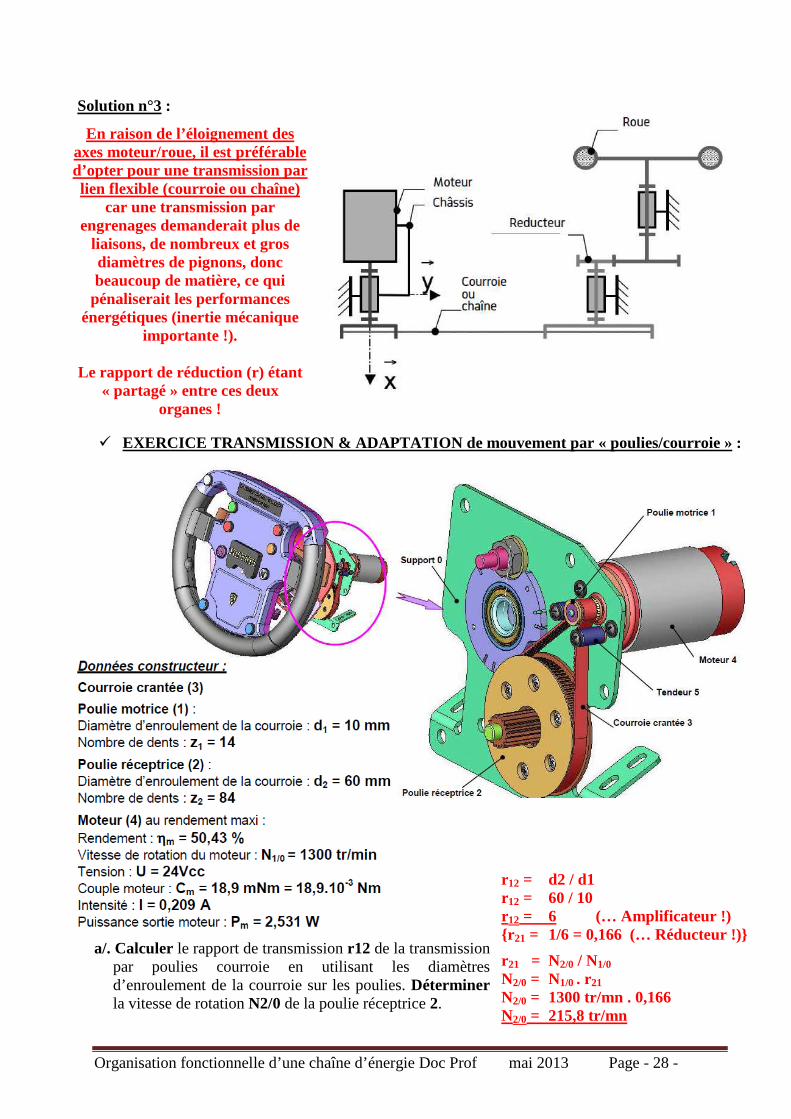
EXERCICE TRANSMISSION & ADAPTATION de mouvement par « poulies/courroie » :
a/. Calculer le rapport de transmission r12 de la transmission par poulies courroie en utilisant les diamètres d’enroulement de la courroie sur les poulies. Déterminer la vitesse de rotation N2/0 de la poulie réceptrice 2.
Solution n°3 :
En raison de l’éloignement des axes moteur/roue, il est préférable d’opter pour une transmission par lien flexible (courroie ou chaîne)
car une transmission par engrenages demanderait plus de
liaisons, de nombreux et gros diamètres de pignons, donc beaucoup de matière, ce qui
pénaliserait les performances énergétiques (inertie mécanique
importante !).
Le rapport de réduction (r) étant « partagé » entre ces deux
organes !
r12 = d2 / d1 r12 = 60 / 10 r12 = 6 (… Amplificateur !) r 21 = 1/6 = 0,166 (… Réducteur !)
r21 = N2/0 / N1/0 N2/0 = N1/0 . r21
N2/0 = 1300 tr/mn . 0,166 N2/0 = 215,8 tr/mn
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 29 -
Avantages , inconvénient et caractéristiques d’une transmission par courroie :
a/. Avantages :
la possibilité d’une variation d’entraxe et de position relative entre les arbres moteur et récepteur ;
une relative souplesse dans la transmission : l’élasticité du matériau constituant la courroie confère à celle-ci un rôle d’amortisseur de couple ;
une possibilité de glissement (courroie / poulie) dans le cas de fortes charges transmises : fonction de limiteur de couple à glissement ;
une non nécessité de lubrification : les carters ne sont que des éléments de protection ;
un entretien limité au réglage périodique de la tension initiale de la courroie ; un fonctionnement silencieux ; une grande durée de vie ; un bon rendement jamais inférieur à 95 %.
b/. Inconvénient :
l’ encombrement des éléments de guidage (roulements, coussinets...) dans les paliers soumis à des efforts radiaux souvent importants (dépendant directement des tensions dans la courroie).
c/. Qualités d’une courroie :
Une courroie doit répondre aux principaux critères suivants :
une grande flexibilité / souplesse ; une certaine élasticité (pour les installations de faible puissance) ; une bonne résistance à la rupture et à la traction ; une bonne résistance à la fatigue (battement de la courroie / souplesse) ; un faible niveau sonore.
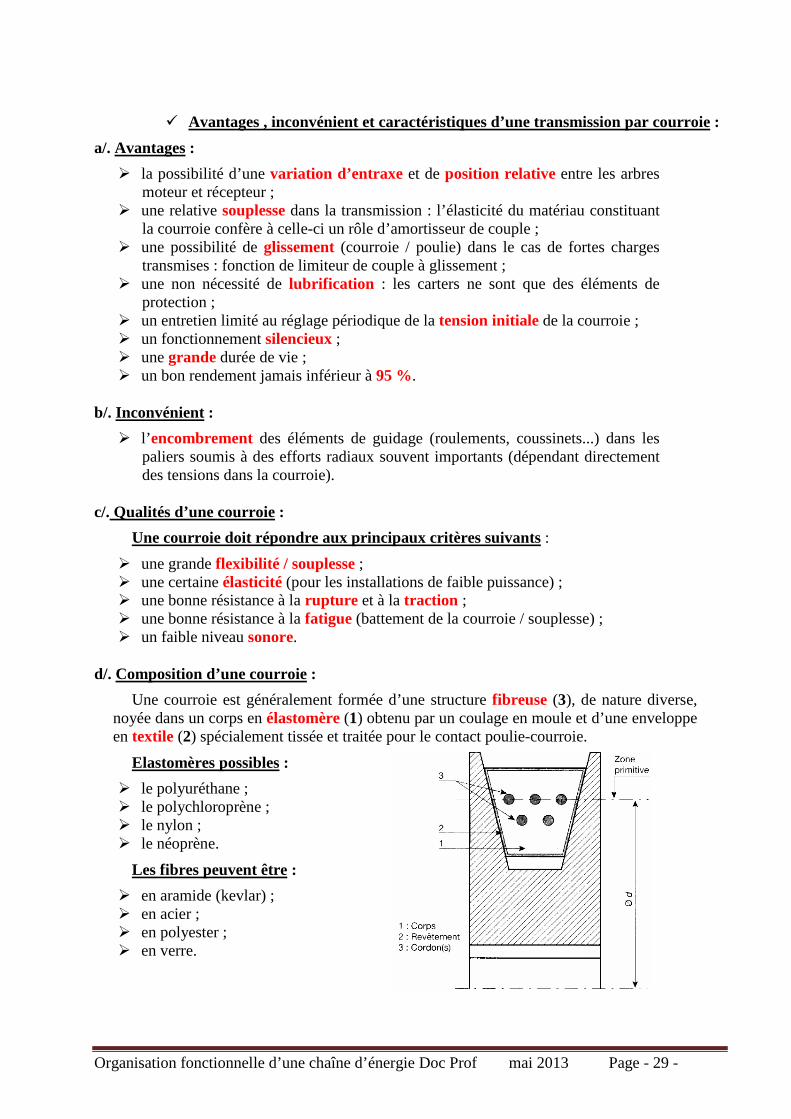
d/. Composition d’une courroie :
Une courroie est généralement formée d’une structure fibreuse (3), de nature diverse, noyée dans un corps en élastomère (1) obtenu par un coulage en moule et d’une enveloppe en textile (2) spécialement tissée et traitée pour le contact poulie-courroie.
Elastomères possibles :
le polyuréthane ; le polychloroprène ; le nylon ; le néoprène.
Les fibres peuvent être :
en aramide (kevlar) ; en acier ; en polyester ; en verre.
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 30 -
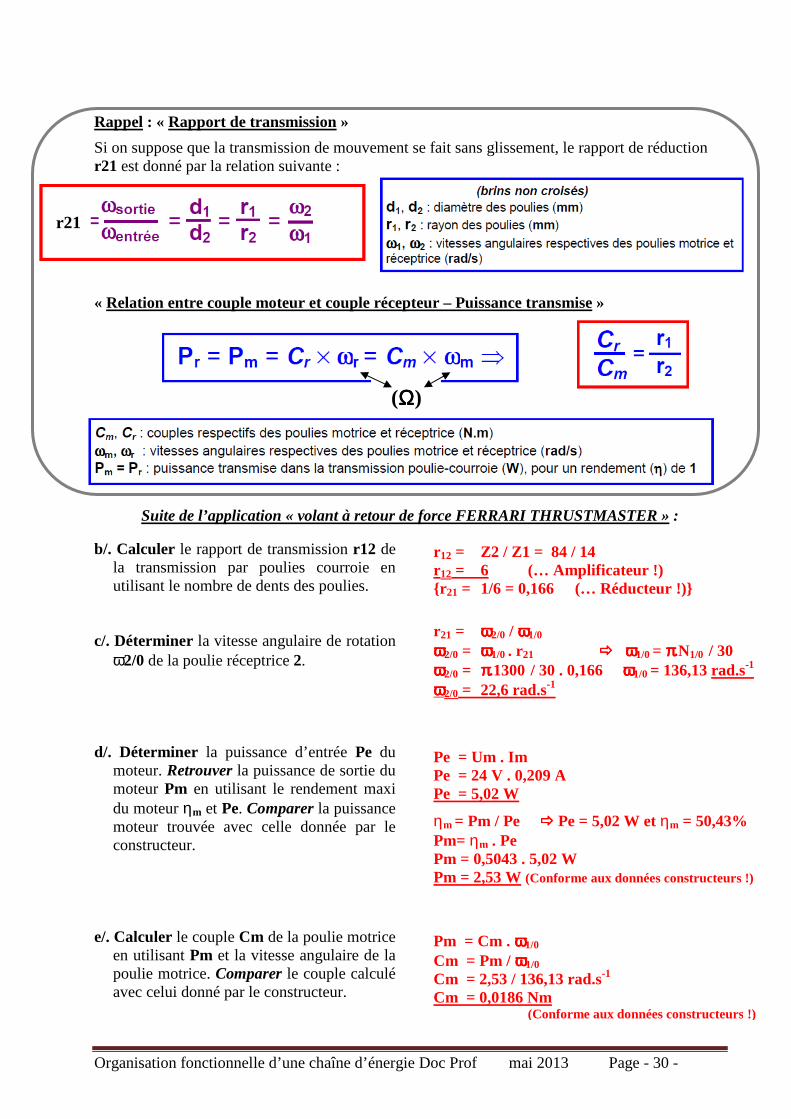
Rappel : « Rapport de transmission »
Si on suppose que la transmission de mouvement se fait sans glissement, le rapport de réduction r21 est donné par la relation suivante :
« Relation entre couple moteur et couple récepteur – Puissance transmise »
Suite de l’application « volant à retour de force FERRARI THRUSTMASTER » :
b/. Calculer le rapport de transmission r12 de la transmission par poulies courroie en utilisant le nombre de dents des poulies.
c/. Déterminer la vitesse angulaire de rotation
ω2/0 de la poulie réceptrice 2. d/. Déterminer la puissance d’entrée Pe du
moteur. Retrouver la puissance de sortie du moteur Pm en utilisant le rendement maxi du moteur ηm et Pe. Comparer la puissance moteur trouvée avec celle donnée par le constructeur.
e/. Calculer le couple Cm de la poulie motrice
en utilisant Pm et la vitesse angulaire de la poulie motrice. Comparer le couple calculé avec celui donné par le constructeur.
r21
r12 = Z2 / Z1 = 84 / 14 r12 = 6 (… Amplificateur !) r 21 = 1/6 = 0,166 (… Réducteur !)
r21 = ωωωω2/0 / ωωωω1/0 ωωωω2/0 = ωωωω1/0 . r21 ωωωω1/0 = ππππ.N1/0 / 30 ωωωω2/0 = ππππ.1300 / 30 . 0,166 ωωωω1/0 = 136,13 rad.s-1 ωωωω2/0 = 22,6 rad.s-1
Pe = Um . Im Pe = 24 V . 0,209 A Pe = 5,02 W
ηm = Pm / Pe Pe = 5,02 W et ηm = 50,43% Pm= ηm . Pe Pm = 0,5043 . 5,02 W Pm = 2,53 W (Conforme aux données constructeurs !)
Pm = Cm . ωωωω1/0 Cm = Pm / ωωωω1/0 Cm = 2,53 / 136,13 rad.s-1 Cm = 0,0186 Nm
(Conforme aux données constructeurs !)
(ΩΩΩΩ)
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 31 -
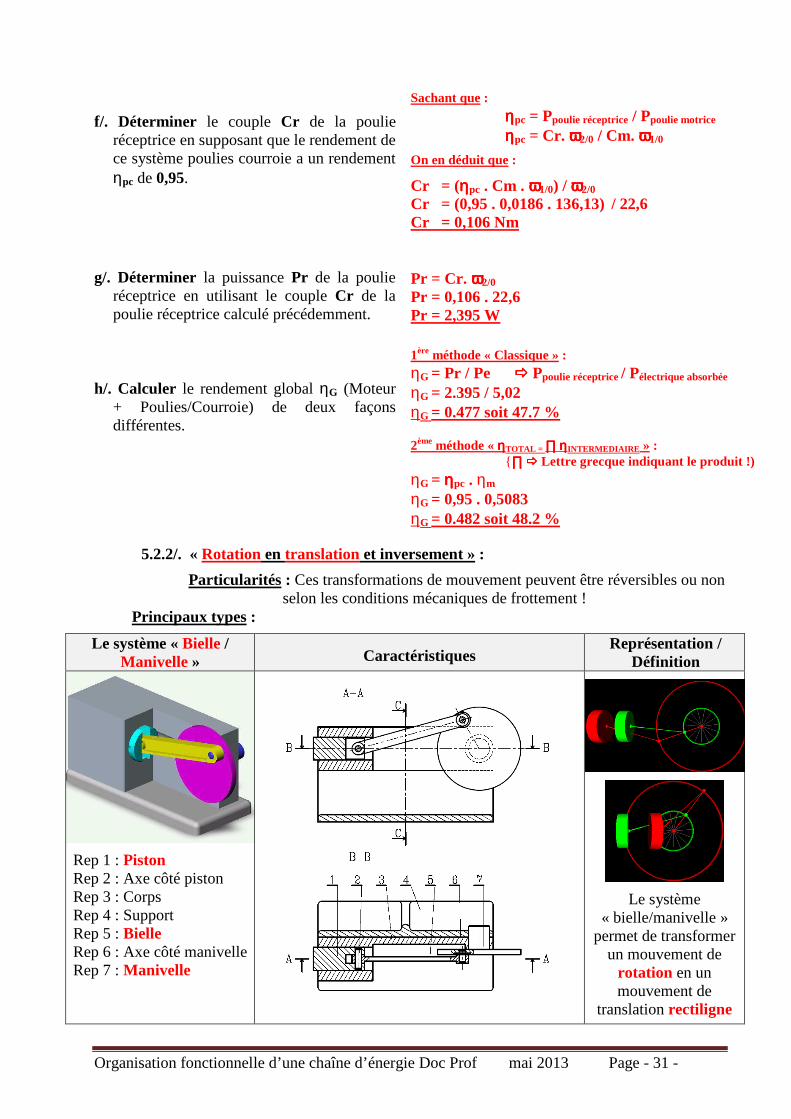
f/. Déterminer le couple Cr de la poulie réceptrice en supposant que le rendement de ce système poulies courroie a un rendement ηpc de 0,95.
g/. Déterminer la puissance Pr de la poulie réceptrice en utilisant le couple Cr de la poulie réceptrice calculé précédemment.
h/. Calculer le rendement global ηG (Moteur
+ Poulies/Courroie) de deux façons différentes.
5.2.2/. « Rotation en translation et inversement » :
Particularités : Ces transformations de mouvement peuvent être réversibles ou non selon les conditions mécaniques de frottement !
Principaux types :
Le système « Bielle / Manivelle »
Caractéristiques Représentation /
Définition
Rep 1 : Piston Rep 2 : Axe côté piston Rep 3 : Corps Rep 4 : Support Rep 5 : Bielle Rep 6 : Axe côté manivelle Rep 7 : Manivelle
Le système « bielle/manivelle »
permet de transformer un mouvement de
rotation en un mouvement de
translation rectiligne
Sachant que :
ηηηηpc = Ppoulie réceptrice / Ppoulie motrice
ηηηηpc = Cr. ωωωω2/0 / Cm. ωωωω1/0
On en déduit que :
Cr = (ηηηηpc . Cm . ωωωω1/0) / ωωωω2/0 Cr = (0,95 . 0,0186 . 136,13) / 22,6 Cr = 0,106 Nm Pr = Cr. ωωωω2/0
Pr = 0,106 . 22,6 Pr = 2,395 W
1ère méthode « Classique » : ηG = Pr / Pe Ppoulie réceptrice / Pélectrique absorbée
ηG = 2.395 / 5,02 ηG = 0.477 soit 47.7 %
2ème méthode « ηηηηTOTAL = ∏∏∏∏ ηηηηINTERMEDIAIRE » : ∏∏∏∏ Lettre grecque indiquant le produit !)
ηG = ηηηηpc . ηm
ηG = 0,95 . 0,5083 ηG = 0.482 soit 48.2 %
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 32 -
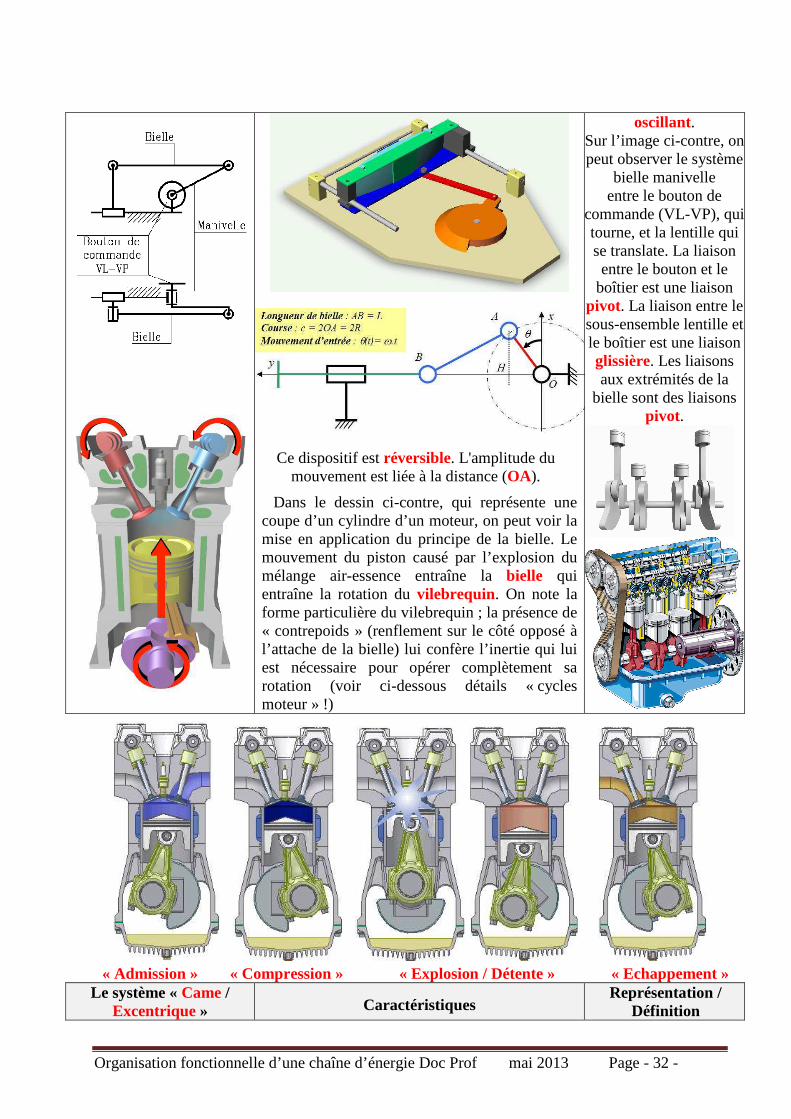
Ce dispositif est réversible. L'amplitude du mouvement est liée à la distance (OA).
Dans le dessin ci-contre, qui représente une coupe d’un cylindre d’un moteur, on peut voir la mise en application du principe de la bielle. Le mouvement du piston causé par l’explosion du mélange air-essence entraîne la bielle qui entraîne la rotation du vilebrequin. On note la forme particulière du vilebrequin ; la présence de « contrepoids » (renflement sur le côté opposé à l’attache de la bielle) lui confère l’inertie qui lui est nécessaire pour opérer complètement sa rotation (voir ci-dessous détails « cycles moteur » !)
oscillant. Sur l’image ci-contre, on peut observer le système
bielle manivelle entre le bouton de
commande (VL-VP), qui tourne, et la lentille qui se translate. La liaison entre le bouton et le
boîtier est une liaison pivot. La liaison entre le sous-ensemble lentille et le boîtier est une liaison glissière. Les liaisons aux extrémités de la
bielle sont des liaisons pivot.
« Admission » « Compression » « Explosion / Détente » « Echappement » Le système « Came /
Excentrique »
Caractéristiques Représentation /
Définition

Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 33 -
« Came » (*)
« Excentrique » (**)
(*/**) Non cylindrique / cylindrique
Une came est un organe mécanique en rotation autour d’un axe. Il possède une partie saillante qui, au cours de la rotation, va exercer une action mécanique sur une pièce annexe (tête de soupape, levier...). Pour la came représentée ci-contre, c’est la forme ovoïde qui assure à la came son efficacité ; cela peut aussi être fait en disposant des dents en saillie à la périphérie d’une roue (voir-contre).
L'amplitude du mouvement est liée aux dimensions de la came.
Les deux reproductions ci-contre simulent l’entraînement d’une soupape par la rotation d’une came. Le rôle de la soupape est de permettre ou d’interdire le passage d’un fluide !
La première représentation montre la position « fermée » du système ; la partie saillante de la came n’appuie pas sur la tête de soupape et le ressort maintient celle-ci en position « haute » ; le fluide ne peut donc pas passer !
La seconde représentation montre la position « ouverte » du système ; la partie saillante de la came appuie sur la tête de soupape et la maintient en position « basse » ; le fluide peut alors circuler !
Le système « Came/ Excentrique » permet de
transformer un mouvement de rotation
en un mouvement de translation rectiligne
alterné.
Le système « Vis / Ecrou »
Caractéristiques Représentation /
Définition
« VIS »
« ECROU »
Le système « Vis/ Ecrou » permet de transformer un mouvement de rotation en un mouvement de translation rectiligne.
Le système vis-écrou est l’utilisation d’une liaison hélicoïdale comme système de
Système à vis différentielle (utilisant
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 34 -
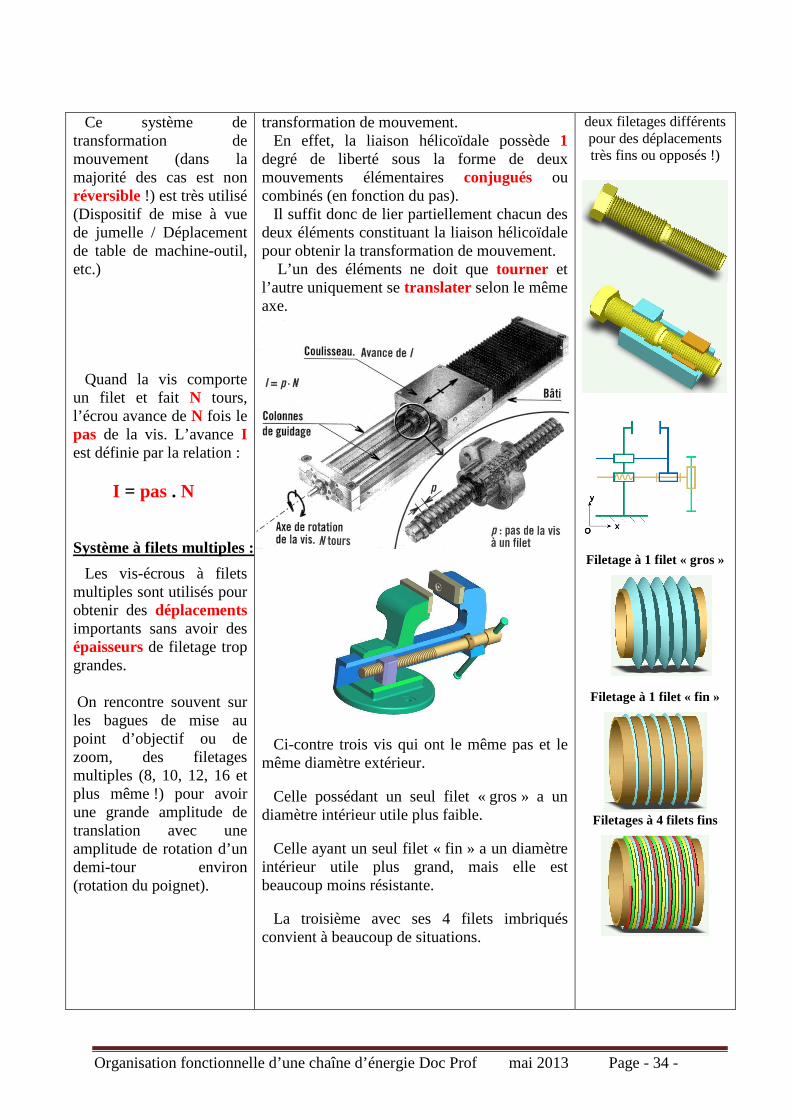
Ce système de transformation de mouvement (dans la majorité des cas est non réversible !) est très utilisé (Dispositif de mise à vue de jumelle / Déplacement de table de machine-outil, etc.)
Quand la vis comporte
un filet et fait N tours, l’écrou avance de N fois le pas de la vis. L’avance I est définie par la relation :
I = pas . N
Système à filets multiples :
Les vis-écrous à filets multiples sont utilisés pour obtenir des déplacements importants sans avoir des épaisseurs de filetage trop grandes. On rencontre souvent sur les bagues de mise au point d’objectif ou de zoom, des filetages multiples (8, 10, 12, 16 et plus même !) pour avoir une grande amplitude de translation avec une amplitude de rotation d’un demi-tour environ (rotation du poignet).
transformation de mouvement. En effet, la liaison hélicoïdale possède 1
degré de liberté sous la forme de deux mouvements élémentaires conjugués ou combinés (en fonction du pas).
Il suffit donc de lier partiellement chacun des deux éléments constituant la liaison hélicoïdale pour obtenir la transformation de mouvement.
L’un des éléments ne doit que tourner et l’autre uniquement se translater selon le même axe.
Ci-contre trois vis qui ont le même pas et le
même diamètre extérieur.
Celle possédant un seul filet « gros » a un diamètre intérieur utile plus faible.
Celle ayant un seul filet « fin » a un diamètre intérieur utile plus grand, mais elle est beaucoup moins résistante.
La troisième avec ses 4 filets imbriqués convient à beaucoup de situations.
deux filetages différents pour des déplacements très fins ou opposés !)
Filetage à 1 filet « gros »
Filetage à 1 filet « fin »
Filetages à 4 filets fins
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 35 -
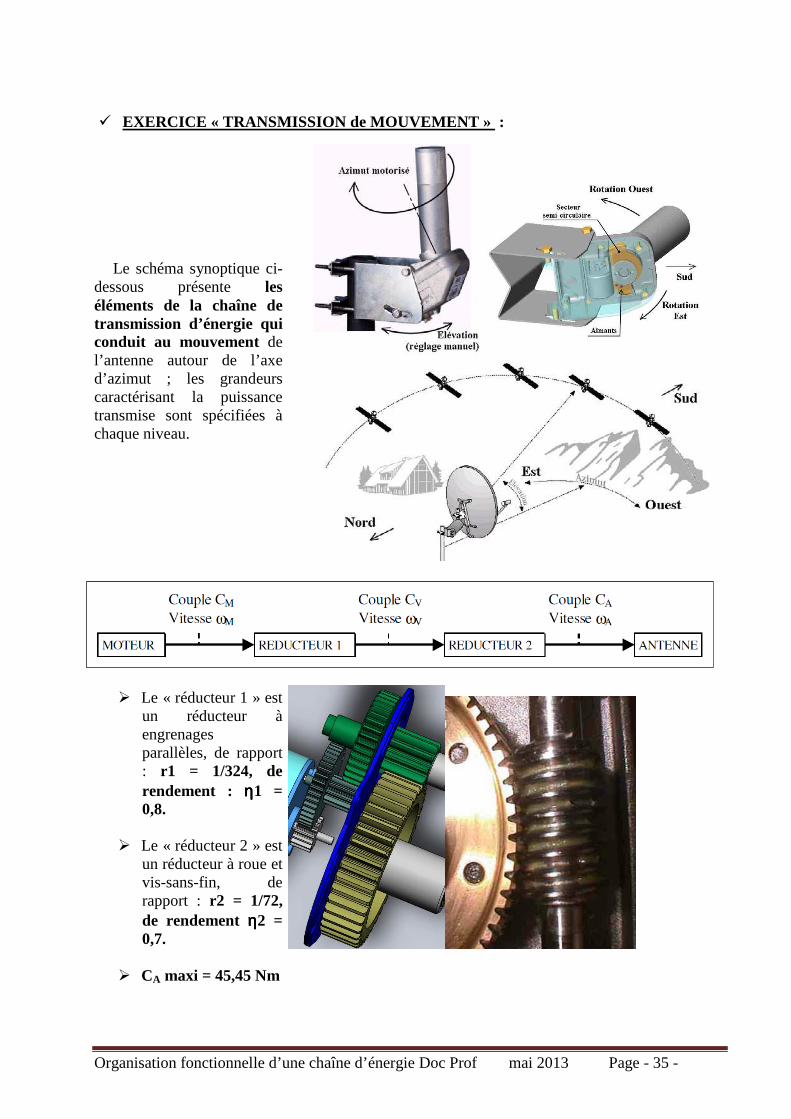
EXERCICE « TRANSMISSION de MOUVEMENT » :
Le schéma synoptique ci-
dessous présente les éléments de la chaîne de transmission d’énergie qui conduit au mouvement de l’antenne autour de l’axe d’azimut ; les grandeurs caractérisant la puissance transmise sont spécifiées à chaque niveau.
Le « réducteur 1 » est un réducteur à engrenages parallèles, de rapport : r1 = 1/324, de rendement : ηηηη1 = 0,8.
Le « réducteur 2 » est un réducteur à roue et vis-sans-fin, de rapport : r2 = 1/72, de rendement ηηηη2 = 0,7.
CA maxi = 45,45 Nm
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 36 -
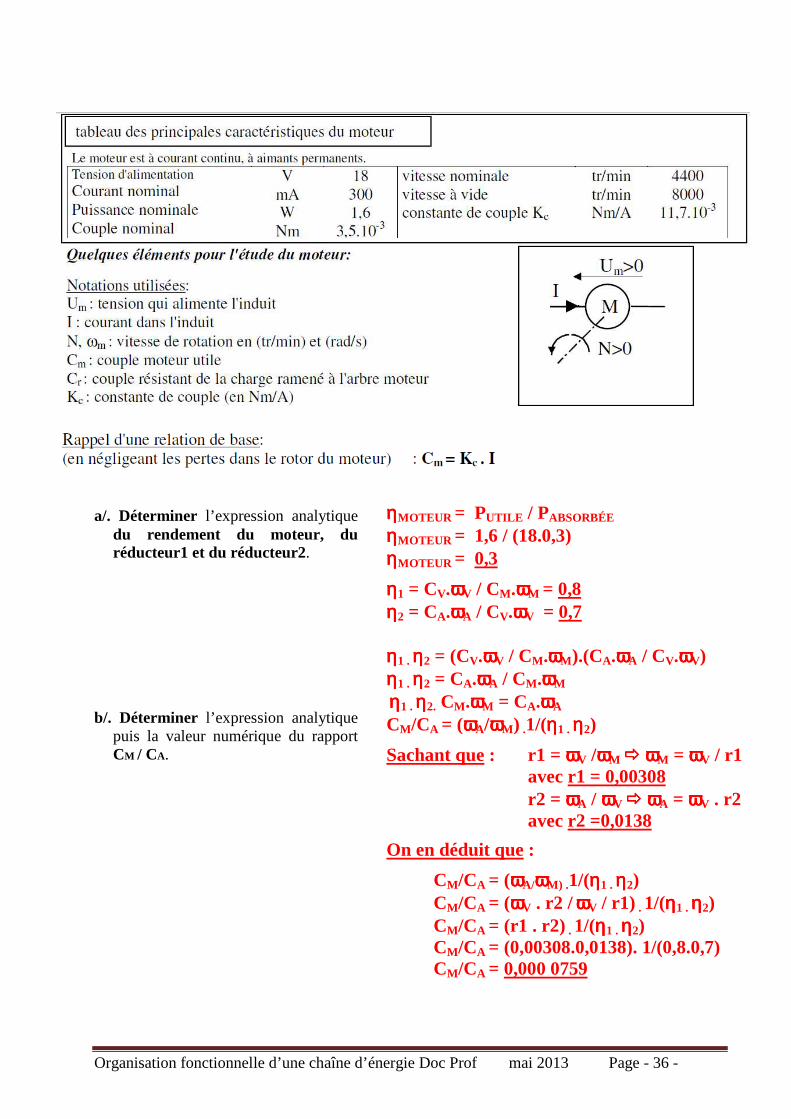
a/. Déterminer l’expression analytique du rendement du moteur, du réducteur1 et du réducteur2.
b/. Déterminer l’expression analytique
puis la valeur numérique du rapport CM / CA.
ηηηηMOTEUR = PUTILE / PABSORBÉE
ηηηηMOTEUR = 1,6 / (18.0,3) ηηηηMOTEUR = 0,3
ηηηη1 = CV.ωωωωV / CM.ωωωωM = 0,8
ηηηη2 = CA.ωωωωA / CV.ωωωωV = 0,7 ηηηη1 . ηηηη2 = (CV.ωωωωV / CM.ωωωωM).(CA.ωωωωA / CV.ωωωωV) ηηηη1 . ηηηη2 = CA.ωωωωA / CM.ωωωωM ηηηη1 . ηηηη2. CM.ωωωωM = CA.ωωωωA CM/CA = (ωωωωA/ωωωωM) .1/(ηηηη1 . ηηηη2)
Sachant que : r1 = ωωωωV /ωωωωM ωωωωM = ωωωωV / r1 avec r1 = 0,00308 r2 = ωωωωA / ωωωωV ωωωωA = ωωωωV . r2 avec r2 =0,0138
On en déduit que :
CM/CA = (ωωωωA/ωωωωM) .1/(ηηηη1 . ηηηη2)
CM/CA = (ωωωωV . r2 / ωωωωV / r1) . 1/(ηηηη1 . ηηηη2)
CM/CA = (r1 . r2) . 1/(ηηηη1 . ηηηη2)
CM/CA = (0,00308.0,0138). 1/(0,8.0,7) CM/CA = 0,000 0759
Organisation fonctionnelle d’une chaîne d’énergie Doc Prof mai 2013 Page - 37 -
c/. En déduire la valeur de l'intensité du courant moteur « I » lorsque s'exerce CA maxi = 45,45 Nm pour un vent de 80 km/h.
d/. Vérifier dans ces conditions que le
moteur peut mouvoir l’antenne sous l’action d’un vent de 80 Km/h.
e/. Le réducteur 2 (à roue et vis-sans-fin )
est irréversible ; expliquer l’avantage principal que procure cette irréversibilité, dans l’utilisation du moteur, lorsque l’antenne est positionnée en visée fixe sur un satellite, et soumise à un vent important.
f/. Calculer la puissance absorbée par le
moteur Pabs, puis le rendement de la chaîne d’énergie complète. Conclure !
Sachant que :
CM/CA = 0,000 0759 et CM = KC . I (KC . I) / CA = 0,000 0759
d’où : I = 0,000 0759 . CA / KC I = 0,000 0759 . 45,45 / 11,7.10-3 I = 0,295 A (295 mA)
A priori pas de problème dans la mesure où cette valeur est proche du courant nominal du moteur
donné par le constructeur qui est de 300 mA !
Grace à l’irréversibilité du réducteur roue et vis-sans-fin, l’antenne restera dans sa position
indépendamment de l’effort extérieur exercé sur la roue et sur l’antenne, en particulier quel que soit
l’effort exercé par le vent ! C’est pourquoi le constructeur annonce (dans sa documentation
publicitaire) que le positionneur peut supporter un vent de 130 Km/h à l’arrêt, alors qu’il ne peut
entraîner l’antenne que lorsque le vent est de 80 km/h maximum.