stochastic gradient descent localisation in quadruped robots
TRANSCRIPT


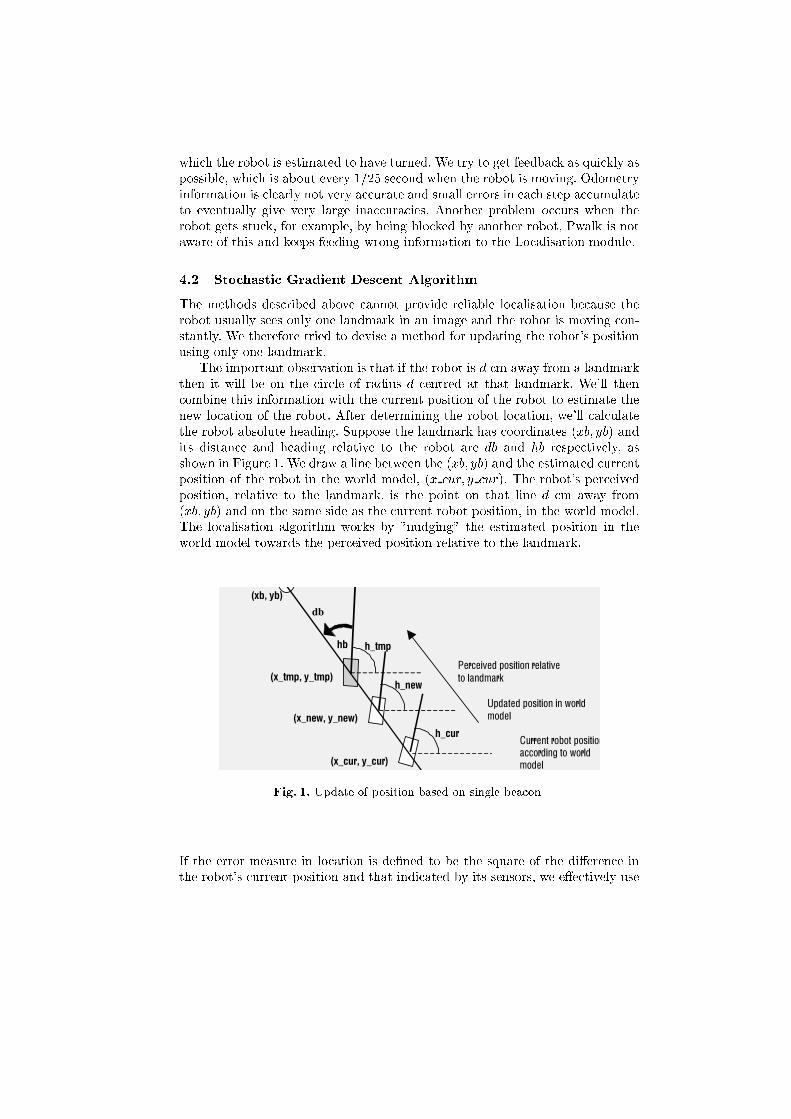
(xb, yb)
hb
db
Current robot positionaccording to worldmodel
Perceived position relativeto landmark
(x_cur, y_cur)
(x_tmp, y_tmp)
h_tmp
h_new
h_cur(x_new, y_new)
Updated position in worldmodel