stochastic estimation of tropospheric path delays in global positioning system geodetic measurements
TRANSCRIPT
David M. TRALLI, Stephen M. LICHTEN Jet Propulsion Laboratory,
California Institute of Technology, Pasadena, CA 91109, U.S.A.
STOCHASTIC ESTIMATION OF TROPOSPHERIC PATH DELAYS
IN GLOBAL POSITIONING SYSTEM GEODETIC MEASUREMENTS
Abstract
Water v~por radiometric (WVR) and surface meteorological (SM) measurements taken during three Global Positioning System (GPS) geodetic experiments are used to calculate process noise levels for random walk and first-order Gauss-Markov temporal models o f tropospheric path delays. Entire wet and combined wet and dry zenith delays at each network site then are estimated simultaneously with the geodetic parameters without prior calibration. The path delays and corresponding baseline estimates are compared to those obtained with calibrated data and stochastic residual delays. In this manner, the marginal utility o f a priori tropospheric calibration is assessed given the ability to estimate the path delays directly using only the GPS data~ Estimation of total zenith path delays with appropriate random walk or Gauss-Markov models yields
baseline repeatabilities o f a few parts in 10 5 . Th/s level o f geodetic precision, and accuracy as suggested by analyses on collocated baselines estimated independently by very long baseline interferometry, is comparable to or better than that obtained after path delay calibration using WVR and~or SM measurements. Results suggest that GPS data alone have sufficient strength to resolve centimeter-level zenith path delay fluctuations over periods of a few minutes.
Introduction
Radio waves propagating through the earth's troposphere are delayed relative to propagating in a vacuum. The path delays are difficult to model due to refraction and variations in atmospheric pressure, temperature, and relative humidity (Smith and Weintraub, 1953 ; Dodson, 1986). Unlike the ionosphere, the troposphere is nondispersive and path delays cannot be determined from observations of signals at different radio frequencies (e.g., Spilker, 1978). Tropospheric path delays, if not properly calibrated, can be a major source of error in space-based geodetic techniques such as Global Positioning System (GPS) geodesy (Lichten and Border, 1987; Tralli et al., 1988; Lichten and Bertiger, 1989; Dixon et al., 1990b; Dixon and Kornreich Wolf, 1990), very long baseline interferometry (VLBI) (Kroger et al., 1986; Herring, 1986; Treuhaft and Lanyi, 1987; E]gered et al., 1990), satellite laser ranging (SLR) (Abshire and Gardner, 1985), and satellite radar altimetry (e.g., SEASAT (Tap]ey et al., 1982),
Bull. Gdod. 64 (1990)pp. 127-159. 1 27
D.M. TRALLI, S.M. LICHTEN
GEOSAT (Monaldo, 1989), and TOPEX (Born et al., 1984a, b) ). Tropospheric path delays therefore must be calculated from independent measurements or estimated simultaneously with the geodetic parameters.
The tropospheric path delay consists of hydrostatic and "wet" components. The hydrostatic path delay is simply a linear function of total surface barometric pressure, assuming static equilibrium and the ideal gas law (Humphreys, 1940; Hopfield, 1971). A small portion of the hydrostatic component is attributable to the contribution of water vapor to the total surface pressure, while the remaining or residual term, the "wet" component, involves integration of the water vapor pressure profile (Saastamoinen, 1972; Davis et al., 1985; Askne and Nordius, 1987). In this paper, the terms "dry" and "hydrostatic" will sometimes be used interchangeabSy for convenience. Although the wet component accounts for only about I0 % of the total path delay, it is more spatially and temporally varying than the hydrostatic component and thus more difficult to model. The accuracy of the hydrostatic path delay term canbe a few millimeters, provided pressure measurements are obtained with accurate barometers and errors are not introduced by horizontal gradients in temperature and pressure.
Several approaches for independently determining the wet component of the tropospheric path delay are available. These include measurement of meteorological parameters at the earth's surface or at altitude with radiosondes and the use of empirical atmospheric models (Reitan, 1963; Berman, 1970; Marini, 1972; Saastamoinen, 1972; Chao, 1973, 1974; Tomasi, 1977; Daviset al., 1985; Askne and Nordius, 1987), or measurements of integrated (line-of-sight) atmospheric water vapor content with infrared spectral hygrometers (Fowle, 1912; Tomasi et al., 1974; Landau, 1982), Raman lidar (light detection and ranging) (Melfi and Whiternan, 1985; Khatib and Grant, 1988) and DIAL (differential absorption lidar) systems (Grant et al., 1987), and water vapor radiometers (WVRs) (Westwater, 1967, 1978; Claflin et al., 1978; Guiraud et al., 1979; Resch et al., 1982, 1985; Resch, 1983; Hogg et al., 1983; Janssen, 1985; Gary et al., 1985; Robinson, 1988). These data also can be used to develop spatial and temporal models of water vapor distribution from which wet path delays can be inferred.
There has been much effort recently in evaluating WVRs for tropospheric path delay calibration in high-precision GPS and VLBI measurements, particularly for assessing the utility of a pr ior i calibration in improving geodetic baseline accuracies, reducing estimated parameter uncertainties, and thus placing an upper bound on the requisite accuracy of tropospheric calibrations. WVRs also are receiving attention for radio metric tracking applications at NASA Deep Space Network (DSN) sites. Although WVR systems offer potential for millimeter-level resolution of wet path delays (e.g. E]gered et al., 1985), they necessitate calibration with differential measurements of refractivity using optical methods (Walter .and Bender, 1987), spectral hygrometers, radiosonde profiles, or other water vapor measurement techniques in order to point out possible systematic errors. Raman lidar in particular may prove an efficient and accurate alternative for WVR calibration (Khatib and Grant, 1988).
WVR'based wet tropospheric path delays obtained from a GPS geodetic experiment in the Gulf of California (Dixon et al., 1990a) are used to demonstrate various means of estimating tropospheric path delays at zenith and to determine the inherent strength of the GPS data to resolve zenith path delays directly without a pr io r i calibrations. Simple temporal stochastic models are discussed in order to
128

STOCHASTIC EST IMAT ION OF TROPOSPHERIC PATH D E L A Y S .....
characterize the zenith path delays at sites of interest. The behavior of the troposphere is parameterized stochastically by the time c0rrelatior~ between zenith path delays and their variance. Stochastic model parameters obtained for two sites in the northern Caribbean (Dixon et al., 1990b), and two sites in Costa Rica (Kellogg et al., 1989; Dixon and Kornreich Wolf, 1990), all occupied with WVRs during other GPS geodetic experiments, also are presented for comparison. The path delays at zenith are estimated from the GPS data entirely or as residuals to a pr ior i calibrations based on V~v'R and/or SM measurements. The marginal util ity of a pr ior i zenith path delay calibration (with stochastic estimation of residual zenith delays) is investigated by comparing estimates of entire wet, and combined wet and dry, zenith path delays determined from the GPS data alone (without respective a pr ior i calibrations), and also by comparing the corresponding geodetic baseline estimates. The sensitivity of zenith tropospheric path delay and geodetic baseline estimates to various stochastic parameter values using random walk and first-order Gauss-Markov models is shown. The extent to which baseline estimate uncertainties depend on the mean level of the'tropospheric path delays and on the level of path delay fluctuations is assessed. Finally, baselines are estimated among otherwise fiducial sites in North America in order to compare with independent VLB[ measurements. This gives an indication of GPS baseline accuracy, which may be affected by systematic errors not apparent through analysis solely of daily baseline repeatability.
Stochastic Path Delay Models
The spatial and temporal characteristics of water vapor fluctuations in the atmosphere can be characterized by probabilistic laws or statistical models. The effects of the troposphere on radio wave propagation then can be predicted over varying spatial dimensions and temporal scales according to a given probability density function or stochastically in terms of the spatial and temporal correlations of the fluctuations (Thompson et al., 1975; Dravskikh and Finkelstein, 1979; Hogg et al., 1981; Treuhaft and Lanyi, 1987).
In this study, the temporal dependence of tropospheric path delays at zenith is modeled both as a first-order Gauss-Markov process and as a random walk process. A first-order Gauss-Markov process is defined by the differential equation
d p / d t = - -p( t ) / rOM + w (t) (1)
where p (t) is the model parameter (e.g. zenith wet path delays obtained from WVR or SM data), rGM is the correlation time, and w( t ) is a zero-mean white noise
2 random variable of variance e w given by the ensemble average of its square,
[w( t ) w ( t ' ) ] = G 2 5 ( t - - t ' ) W
(2)
where [ ] denotes the expectation value operator and 5 ( t - t ' ) is the Dirac delta function. A random walk process is defined simply by
dp/dt = w(t) , (3)
which is the same as equation (1) in the limit of an infinite correlation time.
The discrete solution to equation ( 1 ) is represented by
129
D.M. TRALLI, S.M. LICHTEN
p (t + At) mp (t) + (1 m2) 1/2 = -- WGM (t) (4)
where the parameter m, given by
m = exp ( - At/rGM) , (5)
is a measure of the exponential correlation between adjacent measurements of sampling
interval A t . The steady-state deviation of the Gauss-Markov process, OGM , is obtained 2 by noting that the variance, oC, M (t) , satisfies the differential equation
d 2 (6) -- OGM(t ) = -- (2/I"GM) O'G2M(t)+ a 2 dt w
which at steady-state yields
2 = [Wp 2 ] (7) ~
and is related to the correlation time, rGM, by
= 0 2 0"2GM ~'GM w/2 " (8)
The latter expression follows from equation (2), integration of equation (1), and the correspondence between continuous and discrete process noise.
The discrete solution to equation (3), a random walk process, is given by
p(t + At) = mp(t) + ~/At Wrw (9)
which follows from equation (2) and integration of equation (3). A complete derivation of these expressions is given by Bierman (1977).
The ensemble average of the covariance may be used to obtain the exponential correlation, m, of adjacent measurements. The correlations for either a first-order Gauss-Markov or a random walk process are given by
[p(t + At) p(t)] = [mp 2 (t)] + [(1 -m2)1/2 p(t)Wp] (10a)
= m [p2 ( t ) ] (10b)
noting that [Wp] equals zero for a white noise random variable. The Gauss-Markov
correlation time (r then may be obtained from the value of m and the sampling
interval, A t , using equation (5). Given m, the expression
= , ~ I ( p ( t + A t ) - m p ( t ) ) 2 ] (11) OGM (1 - m 2)
yields the steady-state deviation for a first-order Gauss-Markov process from equation (4), while
1 3 0
STOCHASTIC ESTIMATION OF TROPOSPHERIC PATH DELAYS .....
/~p (t + At) - p ( t ) )2] arw -- "At (12)
. I
yields the corresponding expression for a random walk process from equation (9). The random walk deviation is actually a rate which scales as the reciprocal of the sampling interval and thereby evolves proportionally to the square-root of the time span of the process. The deviation, or process noise, of a random walk can grow indefinitely and therefore is not steady-state.
Zenith tropospheric path delays modeled as Gauss-Markov processes are parameterized entirely by the steady-state deviations (aGM) and correlation times
( r G M ) , while parameterization as random walks is based solely on the process noise
rates (arw). In the limit of infinite or large correlation time relative to data sampling
interval A t , modeling the troposphere as a Gauss-Markov process becomes equivalent to modeling as a random walk process. Since the first-order Gauss-Markov process is of zero mean, a constant term is estimated jointly as an additional parameter. An advantage of the Gauss-Markov formulation is that it allows direct comparison with constant delay models, helping to evaluate the marginal improvement to the geodetic parameter estimates specifically attributable to modeling the path delay fluctuations (Tra]li et al., 1988). A random walk process, in the limit of decreasing process noise, approaches a constant constrained by an a pr ior i deviation specified according to the expected path delay at the onset of the process. This a pr ior i deviation is analogous to the constraint imposed on the constant term which is estimated jointly with the Gauss- Markov process.
Stochastic model parametervalues can be determined empirically from the WVR or SM wet path delays. The use of WVR data or other comparably accurate measurements is preferable given the smaller uncertainties in the predicted zenith path delays, yielding more constrained model parameters. The parameter values are calculated by iterating the discrete solution of the first-order differential equation for a Gauss- Markov or random walk process (Bie~an, 1977), as described earlier. Alternatively, the stochastic models may be derived empirically, by minimizing the day-to-day scatter of a set of independent geodetic estimates spanning several days (Trall iet al., 1988 ; Dixon et al., 1990b; Dixon and Komreich Wolf, 1990). In the analyses to follow, the sensitivity of zenith tropospheric path delay and baseline estimates to various stochastic parameter values also are used as criteria to suggest appropriate path delay models. Since dry tropospheric path delays generally do not fluctuate significantly, stochastic estimation of the total (combined wet and dry) zenith tropospheric delay without any apr ior i calibration also is attempted, with wet and dry path delay fluctuations parameterized by a common zenith path delay model (e.g. Armstrong and Sramek, 1982 ; Treuhaft and Lanyi, 1987).
Data Analysis
Six days of GPS observations from 18 to 23 November 1985 at Loreto and Cabo San Lucas in Baja California and at Mazatlan across the Gulf of California, on the mainland of Mexico, form the major data set used in this study. WVR measurements were taken at each of these sites. Data from sites occupied with WVRs in other GPS geodetic experiments in the northern Caribbean (Grand Turk) during June 1986 (Dixon et al., 1990b) and in Costa Rica (Limon and Liberia) during the C/kS/k UNO
131
D.M. TRALLI, S.M. LICHTEN
experiment in January 1988 (Kellogg et al., 1989; Dixon and KornreichWolf, 1990) also were analyzed for comparison. The only three-channel WVR used was the J-01 unit (Janssen, 1985) at Cabo San Lucas and Grand T u r k . R - 0 4 (Resch et al., 1985) was used at Mazatlan, SCAM at Loreto, and D-series WVRs (B. Gary, Jet Propulsion Laboratory) were used at Limon and Liberia. A North American fiducial network consisting of International Radio Interferometric Surveying (IRIS)sites (Westford, MA, Fort Davis, TX, and Richmond, FL), and sites at the Owens Valley Radio Observatory (OVRO) and Mojave, CA, near the Goldstone DSN facility, were used to constrain satellite orbits and define a reference coordinate frame relative to VLBI . Wet tropospheric path delay calibrations at IRIS sites and at OVRO and Mojave were based on WVR data when available or otherwise on SM measurements and theChao (1973, 1974) atmospheric model. Dry path delay calibrations were based on SM measurements of barometric pressure (Hopfield, 1971). WVR and SM measurements were taken from a few to about 30 min, the latter sampling being rather coarse compared to that of the GPS data and thus somewhat limiting the constraint'provided by apriori calibration. Residual wet path delays at fiducial sites were estimated simply as constants with 20 cm apriori uncertainties (2 cm at OVRO, where WVR data were available) and were not a variable in assessing different tropospheric path delay estimation schemes. Results of stochastic estimation of tropospheric delays over the entire gulf network are presented by TraUi and Dixon (1988).
Seven CPS satellites were observed (NAVSTARs 3, 4, 6, 8, 9, 10, l l ) , but satellite 11 had very short view periods over North America. TI-4100 GPS receivers (Henson et al., 1985) were used at all sites except at OVRO and Mojave where SERIES-X receivers (Crow et al., 1984) were deployed. No pseudorange data were available from these latter receivers. The pseudorange data constrain GPS clocks and carrier phase ambiguities, improving geodetic baseline precision (Lichten and Border, 1987;Tralli and Dixon, 1988). Timing and range errors may map into tropospheric parameter estimates, introducing a tradeoff between east and vertical baseline component repeatabilities, particularly with the use of carrier phase data only (Tralli et al., 1988). Such tradeoffs may be due to weak satellite and receiver network geometry and overall low data quality, and tend to be more pronounced without bias fixing (e.g. Dixon et al., 1990b). Single-day satellite observing sessions were processed. Combined GPS carrier phase and pseudorange data were used wherever possible in all analyses. Coupling of timing errors with estimates of tropospheric delays is minimized since satellite and receiver clocks can be modeled or differenced to remove common errors (Bock et al., 1986). Carrier phase cycle ambiguity resolution techniques such as bias fixing (Dong and Bock, 1989) and bias optimization (Blewitt, 1989) proved unsuccessful for the Gulf of California data, presumably due to the limited extent of the three-station gulf network and the lack of shorter baselines to "bootstrap" the determination of carrier phase biases to longer baselines where differential ionospheric effects are more significant. Although discussed later, we mention that since the geodetic precision and accuracy
achieved nevertheless is at a few parts in 108 over baseline lengths of 350, 450, and 650km, the data are sufficiently robust for evaluation of the various tropospheric calibration and estimation schemes.
The method of estimating satellite trajectories, station positions, system clocks as white noise processes (equivalent to double differencing (e.g. Bock et al., (1986)) ), carrier phase ambiguities (real-valued rather than integer), and dynamic earth parameters is described by Wu et al., (1986), Davidson et al., (1987), and Lichten and Border (1987).
132
STOCHASTIC ESTIMATION OF TROPOSPHERIC PATH DELAYS .....
The GPS Inferred Positioning System (GIPSY) software developed at the Jet Propulsion Laboratory is employed in this study. The J-2000 reference system was used, with observation partial derivatives for estimated parameters calculated relative to satellite epoch states (Sovers and Border, 1987). The parameter estimation algorithm was a batch sequential U - D factorized filter (Bierman, 1977 ; Thornton and Bierman, 1980) , similar to a Kalman filter (Ka]~an, 1960) but providing greater numerical stability. The Gauss-Markov and random walk stochastic models used to estimate zenith tropospheric path delays were implemented according to Bierman (1977), as described in the previous section. Since a first-order Gauss-Markov process is of zero mean, a constant term was estimated jointly with an apriori constraint of 2cm after WVR calibration but unconstrained after SM calibration. The apriori uncertainty of a random walk process was constrained similarly according to the expected path delay at the onset of the data span. M R data were reduced with the Robinson (1988) profile algorithm. All 30 s carrier phase and pseudorange data were compressed to 6 ram normal points. The analytic mapping functions developed by Lanyi (1984) were used, accurate to a level of 0.1 - 0.2 % , or about 2 to 4 cm, at 6 deg elevation angle. The satellite elevation angle cutoff was 15 deg in order to minimize the effects of multipathing at receiver antennae and also to limit errors in the elevation angle mapping functions.
Discussion of Results
Zenith tropospheric path delays are modeled both as random walk and first- order Gauss-Markov processes. The sensitivity of path delay estimates to various stochastic parameter values is assessed. The ability of the GPS data alone to resolve zenith path delays is evaluated by comparing estimates with and without apriori calibration, including estimates of combined wet and dry zenith delays. The best representation of the wet delay is assumed to come from M R data recorded at each site. Zenith tropospheric solutions obtained entirely by stochastic estimation techniques are compared to V~/R calibration data and to estimates with apriori calibration based on these WVR data. This suggests accuracy requirements on WVR-based calibrations and thereby tests the above assumption. Improvements attributed to modeling residual zenith delays also yield information on WVR retrieval algorithm error.
A priori calibration numerically strengthens the system of equations which must be solved by reducing the number of parameters that otherwise would be estimated simultaneously with satellite epoch states and geodetic receiver positions. In the case of constrained tropospheric parameters, whereby an apriori calibration is undertaken and residual zenith delays (which can be viewed as corrections to the calibration) then are estimated, the system of equations is strengthened by decreasing the apriori uncertainties of the residual delay parameters to the supposed accuracy of the calibration, hence increasing their weight relative to less-constrained parameters. This is simply weighted least-squares estimation where the tropospheric path delay is one of several geodetic model parameters (i.e. Sovers and Border, 1987). If residual delays are estimated solely as a constant offset or systematic bias, hence assuming fluctuations in the calibration are correct, only one tropospheric parameter per site is required for the span of data. However, estimation of residual delays as constants or piecewise constant, as often done in GPS and VLBI data analysis, may not be adequate for geodetic applications requiring high accuracy and precision (Tra]]i et al., 1988). If residual delays are estimated stochastically (i.e. time varying), a separate zenith" delay is estimated at each site for each normal point. The temporal correlations and variances of these estimates are specified by the stochastic model used.
133
D.M. TRALLI, S.M. LICHTEN
Comparison of the various tropospheric calibration and estimation schemes is based principally on their effect on day-to-day baseline repeatability, a measure of precision. Analysis of post-fit root-mean-square (rms) carrier phase residuals at each gulf site indicated differences of only a few millimeters for different stochastic parameter values, and therefore did not prove to be a useful discriminant. Stochastic models which yield the best baseline component repeatabilities do not correspond to the smallest post-fit rms residuals. Minimization of residuals, given various tropospheric models, may allow mismodeling of other geodetic parameters and therefore is not necessarily an appropriate measure of system performance, whereas baseline estimates are a measure of a physical quantity which should be repeatable over the course of experiments of the type in this study spanning a few days. However, neither residuals nor repeatability are indicative of systematic errors~ In order to test for possible systematic errors, baseline accuracies are determined by comparison with estimates obtained independently by VLBI.
Stochastic Parameterization and Calibration Errors
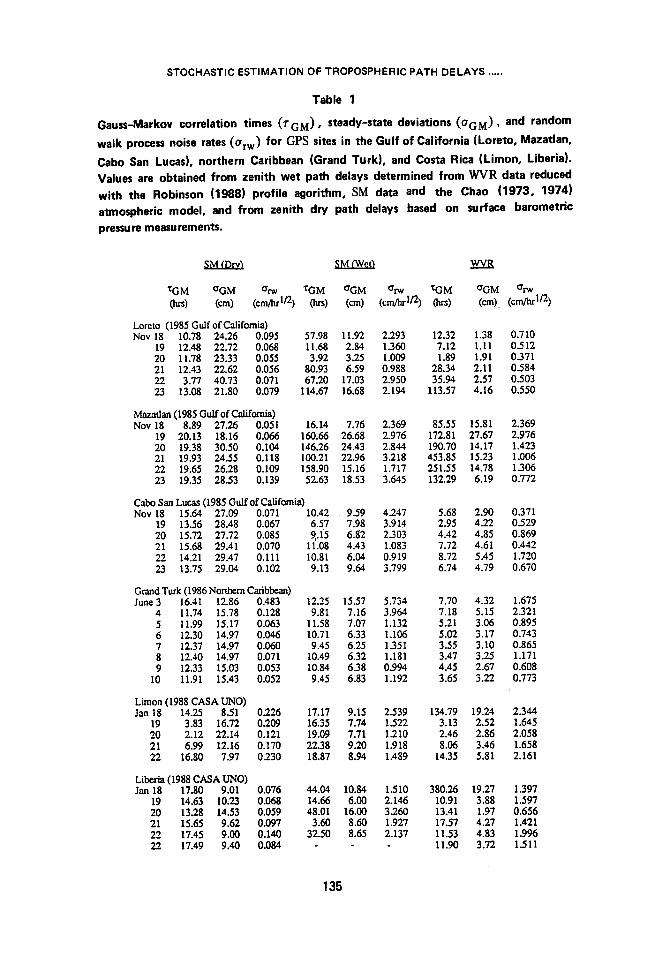
Gauss-Markov correlation times (TGM), steady-state deviations (O'GM) , and
random walk process noise rates (ezw) obtained from zenith wet path delays based on
SM and WVR data corresponding to satellite observation periods at sites occupied with WVRs during the gulf, northern Caribbean, and CASA UNO GPS experiments are given in Table 1. Stochastic parameter values determined from zenith dry path delays also are given for comparison and as a basis for estimating combined wet and dry delays in a later section. Typically, Gauss-Markov correlation times based on WVR data are of the order of several minutes to a few hours, with steady-state deviations usually about 1 to 5 cm. Steady-state deviations for Mazatlan are much larger than for the other sites, but the correlation times are a few days; the fluctuation level therefore is similar over the satellite observation span (also noted by comparing derived random walk process noise rates). Random walk models yield about 1 mm of process noise per 6 min fi lter batch interval, or about 1.5 cm over the entire data span of 6 hrs. The range of parameter values is comparable to values used in VLBI (Herring et al., 1990; Tralli et al., 1990). These data suggest that the variation in the stochastic parameters actually may be fairly limited (less than an order of magnitude) regardless of geographic region. Average wet path delays determined from several thousand radiosonde measurements in the Caribbean region are 21 to 26 cm + 5 to 8 cm, and 23 + 10 cm at Mazatlan (Gary and Keihm, 1986).
Stochastic parameter values derived from SM and WVR zenith path delays also are used to estimate residual delays to the respective apr ior i calibrations. The assumption follows that residual errors can be modeled the same as predicted zenith path delays. Parameter values obtained from SM measurements suggest a greater level of process noise, but again are consistent from site to site. Stochastic estimates of SM residual delays therefore are less constrained than estimated residual delays to WVR calibration. The more constrained stochastic parameter values obtained from WVR delay data in fact are used to estimate entire wet path delays when no ap r io r i calibration is undertaken. Knowledge of the temporal spectrum of the calibration error is needed in order to specify a model appropriate for estimating residual delays.
Predicting zenith wet path delays from SM data with the Chao (1973, 1974) atmospheric model has obvious limitations in these experiments. The model was
134
STOCHASTIC ESTIMATION OF TROPOSPHERIC PATH DELAYS .....
Table 1
Gauss-Markov correlation times (rGM), steady-state deviations (aGM), and random walk process noise rates (Orw) for GPS sites in the Gulf of California (Loreto, Mazatlan,
Cabo San Lucas), northern Caribbean (Grand Turk), and Costa Rica (Limon, Liberia). Values are obtained from zenith wet path delays determined from WVR data reduced with the Robinson (1988) profile agorithm, SM data and the Chao (1973, 1974) atmospheric model, and from zenith dry path delays based on surface barometric pressure measurements.
SM (Dry) SM (Wet) WVR
X-GM ~ grw '~GM ~ ~ "t:GM ~ ~ (]~s) (cm) (cm/lu "I/2) (h~) (cm) (cm/hr I/2) (hrs) (cm) (cm/hr I/2)
Loreto (1985 Gulf of California) Nov 18 10.78 24.26 0.095 57.98 11.92 2.293 12.32 1.38 0.7 I0
19 12.48 22.72 0.068 11.68 2.84 1.360 7.12 I.I I 0_5 12 20 11.78 23.33 0.055 3.92 3.25 1.009 1.89 1.91 0.371 21 12.43 22.62 0.056 80.93 6.59 0.988 28.34 2.11 0.584 22 3.77 40.73 0.071 67.20 17.03 2.950 35.94 2.57 0.503 23 13.08 21.80 0.079 114.67 16.68 2.194 113.57 4.16 0_550
Mazatlan (1985 Gulf of California) Nov 18 8.89 27.26 0.051 16.14 7.76 2.369 85.55 15 .81 2.369
19 20.13 18 .16 0.066 160 .66 26.68 2.976 172 .81 27.67 2.976 20 19.38 30.50 0.104 146 .26 24.43 2.844 190.70 14.17 1.423 21 19.93 24.55 0.118 100.21 22.96 3.218 453.85 1 5 . 2 3 !.006 22 19.65 26.28 0.109 158 .90 15.16 1 . 7 1 7 251.55 14.78 1.306 23 19.35 28.53 0.139 52.63 18 .53 3.645 132.29 6.19 0.772
Cabo San Lueas (1985 Gulf of California) Nov 18 15.64 27.09 0.071 10.42 9.59 4.247 5.68 2.90 0.371
19 13.56 28.48 0.067 6.57 7.98 3.914 2.95 4.22 0.529 20 15.72 27.72 0.085 9,.15 6.82 2.303 4.42 4.85 0.869 21 15.68 29.41 0.070 11.08 4.43 1.083 7.72 4.61 0.442 22 14.21 29.47 0.111 10.81 6.04 0.919 8.72 5.45 1.720 23 13.75 29.04 0.102 9.13 9.64 3.799 6.74 4.79 0.670
Grand Turk (1986 Northern Caribbean) June 3 16.4l 1 2 . 8 6 0.483 12.25 15 ,57 5.734 7.70 4.32 1.675
4 11 .74 15 .78 0.128 9.81 7.16 3.964 7.18 5.15 2.321 5 11 .99 15 .17 0.063 11.58 7.07 1.132 5.21 3.06 0.895 6 1 2 . 3 0 14 .97 0.046 10.71 6.33 1.106 5.02 3.17 0.743 7 12 .37 14 .97 0.060 9.45 6.25 1.351 3.55 3.10 0.865 8 1 2 . 4 0 14 .97 0.071 10.49 6.32 1.181 3.47 3.25 1.171 9 12 .33 15 .03 0.053 10.84 6.38 0.994 4.45 2.67 0.608
10 11 .91 15 .43 0.052 9.45 6.83 1.192 3.65 3.22 0.773
Limon (1988 CASA UNO) Jan 18 14.25 8.51 0.226 17.17 9.15 2.539 134.79 19.24 2.344
19 3.83 16.72 0.209 16.35 7.74 1_522 3.13 2.52 1.645 20 2.12 22.14 0.121 19.09 7.71 1210 2.46 2.86 2.058 21 6.99 12.16 0.170 22.38 9.20 1.918 8.06 3.46 1.658 22 16.80 7.97 0230 18.87 8.94 1.489 14.35 5.81 2.161
Liberia (1988 CASA UNO) Jan 18 17.80 9.01 0.076 44.04 1 0 . 8 4 1 . 5 1 0 380.26 19.27 1.397
19 1 4 . 6 3 10 .23 0.068 14.66 6.00 2.146 10.91 3.88 1.597 20 13.28 14.53 0.059 48.01 16.00 3.260 13.41 1.97 0.656 21 15.65 9.62 0.097 3.60 8.60 1.927 17.57 4.27 1.421 22 17.45 9.00 0.140 32.50 8.65 2.137 11.53 4.83 1.996 22 17.49 9.40 0.084 11.90 3.72 1.511
135
D.M. TRALLI, S.M. LICHTEN
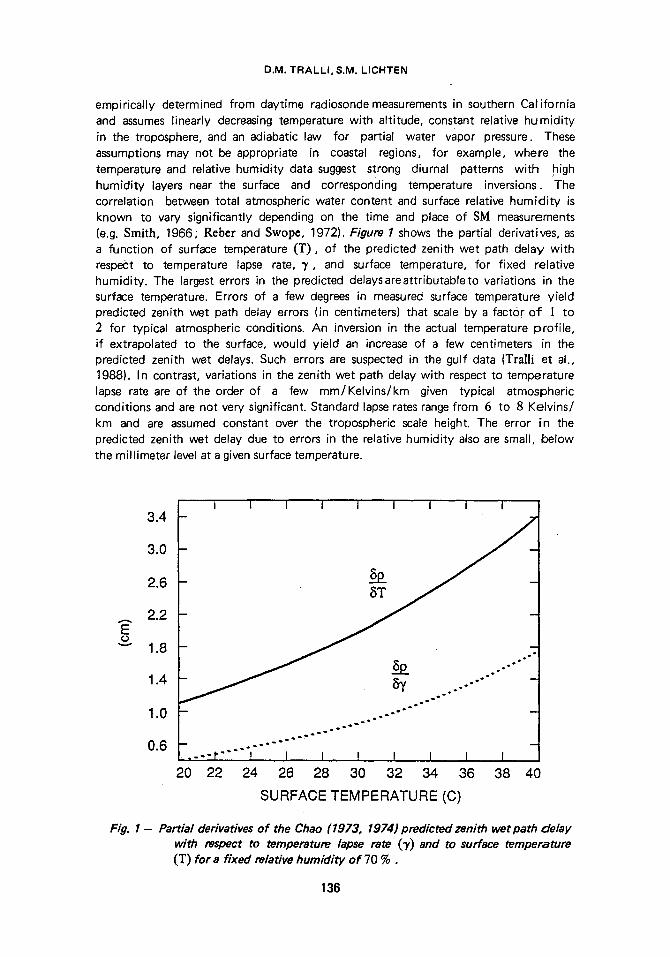
empirically determined from daytime radiosonde measurements in southern California and assumes linearly decreasing temperature with altitude, constant relative humidity in the troposphere, and an adiabatic law for partial water vapor pressure. These assumptions may not be appropriate in coastal regions, for example, where the temperature and relative humidity data suggest strong diurnal patterns with high humidity layers near the surface and corresponding temperature inversions. The correlation between total atmospheric water content and surface relative humidity is known to vary significantly depending on the time and place of SM measurements (e.g. Smith, 1966; Reber and Swopr 1972). Figure 1 shows the partial derivatives, as a function of surface temperature (T) , of the predicted zenith wet path delay with respect to temperature lapse rate, 3', and surface temperature, for fixed relative humidity. The largest errors in the predicted delays areattributableto variations in the surface temperature. Errors of a few degrees in measured surface temperature yield predicted zenith wet path delay errors (in centimeters) that scale by a factor o f I to 2 for typical atmospheric conditions. An inversion in the actual temperature profile, if extrapolated to the surface, would yield an increase of a few centimeters in the predicted zenith wet delays. Such errors are suspected in the gulf data (Tragi et al., 1988). In contrast, variations in the zenith wet path delay with respect to temperature lapse rate are of the order of a few mm/Kelvins/km given typical atmospheric conditions and are not very significant. Standard lapse rates range from 6 to 8 Kelvins/ km and are assumed constant over the tropospheric scale height. The error in the predicted zenith wet delay due to errors in the relative humidity also are small, below the millimeter level at a given surface temperature.
3.4
3.0
2.6
2.2 E o "-" 1.8
1.4
1.0
0.6
- 1 I I I I I I I 7 ~
- ~ - BT
~ p oot~ o~176176176176
. . . . r ' ' " I I I I
20 22 24 26 28 30 I t I 1
32 34 36 38 40
SURFACE TEMPERATURE (C)
Fig. I - Partial derivatives of the Chao (1973, 1974) predicted zenith wet path delay with respect to temperature lapse rate (3') and to surface temperature (T) for a fixed relative humidity of 70 % .
136
STOCHASTIC ESTIMATION OF TROPOSPHERIC PATH DELAYS .....
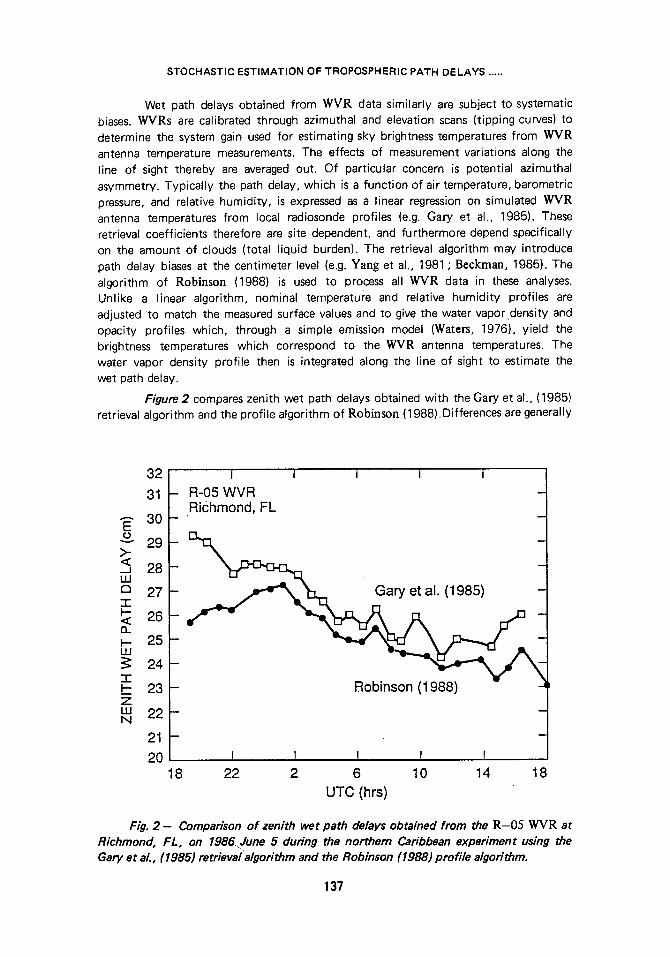
Wet path delays obtained from ~V'R data similarly are subject to systematic biases. T~fRs are calibrated through azimuthal and elevation scans (tipping curves) to determine the system gain used for estimating sky brightness temperatures from WVR antenna temperature measurements. The effects of measurement variations along the line of sight thereby are averaged out. Of particular concern is potential azimuthal asymmetry. Typically the path delay, which is a function of air temperature, barometric pressure, and relative humidity, is expressed as a linear regression on simulated WVR antenna temperatures from local radiosonde profiles (e.g. Gary et al., t985). These retrieval coefficients therefore are site dependent, and furthermore depend specifically on the amount of clouds (total liquid burden). The retrieval algorithm may introduce path delay biases at the centimeter level (e.g. Yang et al., 1981 ; Beckman, 1985). The algorithm of Robinson (1988) is used to process all WVR data in these analyses. Unlike a linear algorithm, nominal temperature and relative humidity profiles are adjusted to match the measured surface values and to give the water vapo# density and opacity profiles which, through a simple emission model (Waters, 1976), yield the brightness temperatures which correspond to the WVR antenna temperatures. The water vapor density profile then is integrated along the line of sight to estimate the wet path delay.
Figure2 compares zenith wet path delays obtained with the Gary et al., (1985) retrieval algorithm and the profile algorithm of Robinson (1988).Differences are generally
32
31
30 E o 2 9
28
o 27
~ 26 25
24
2 3 Z LU N 2 2 -
21 -
2 0 1 8
I I I I I |
- R-05 WVR .Richmond, FL
q
m m
Robinson (1988) | I I I I f -~
2 2 2 6 10 14 18 UTC (hrs)
Fig. 2 - Comparison of zenith wet path delays obtained from the R-05 WVR at Richmond, FL, on 1986.June 5 during the northern Caribbean experiment using the Gary et al., (1985) retrieval algorithm and the Robinson (1988) profile algorithm.
137
D.M. TRALLI, SoM. LICHTEN
less than ! to 2 cm, but reach 3 cm at the onset of the data. Both algorithms use the water vapor emission model of Waters (1976), with the cloud model specified by Gary et al., (1985). In addition to a small offset, the level of path delay fluctuations varies between the two algorithms. There are several sources of error in WVR retrieval algorithms. Disagreement exists about the appropriate line shape used to model the 22 GHz water vapor transition, as well as some question about the form and size of the empirical correction ("cont inuum") used to make the calculated spectrum agree with the data (S.J. Wa]ter, personal communication, 1990). Inaccuracies in the line shape and continuum lead to systematic frequency-dependent errors which become apparent when data from different WVRs utilizing different frequencies are compared. This source of error does not show up in the comparison of Figure 2 since data from only one radiometer were used and both algorithms use the same emission model. However, the discrepancy shown is sensitive to differences in modeling the altitude profile of the delay. '
Additional errors in the WVR calibration may be attributed to the wet mapping function used in the retrieval algorithm. For example, the Robinson (1988) algorithm uses a simple first-order cosine of the elevation angle mapping function, whereas partial derivatives for estimation of zenith delay parameters are calculated using the LanyJ (1984) wet mapping function. Although differences in mapping functions for elevation angles greater than 30deg (corresponding to the lowest WVR tipping curve) are negligible, a bias may be introduced in the calibration. Residual wet path delay estimates also may incorporate residual errors in the dry calibration. This suggests why estimation of stochastic residual delays yields better baseline repeatability than estimating only constant offsets. Studies such as this one must ensure that the WVR data have been passed through an appropriate retrieval algorithm before any statements concerning the util ity of WVRs for apriori calibration can be made. Furthermore, the dry path delay calibration also must be accurate to a few millimeters.
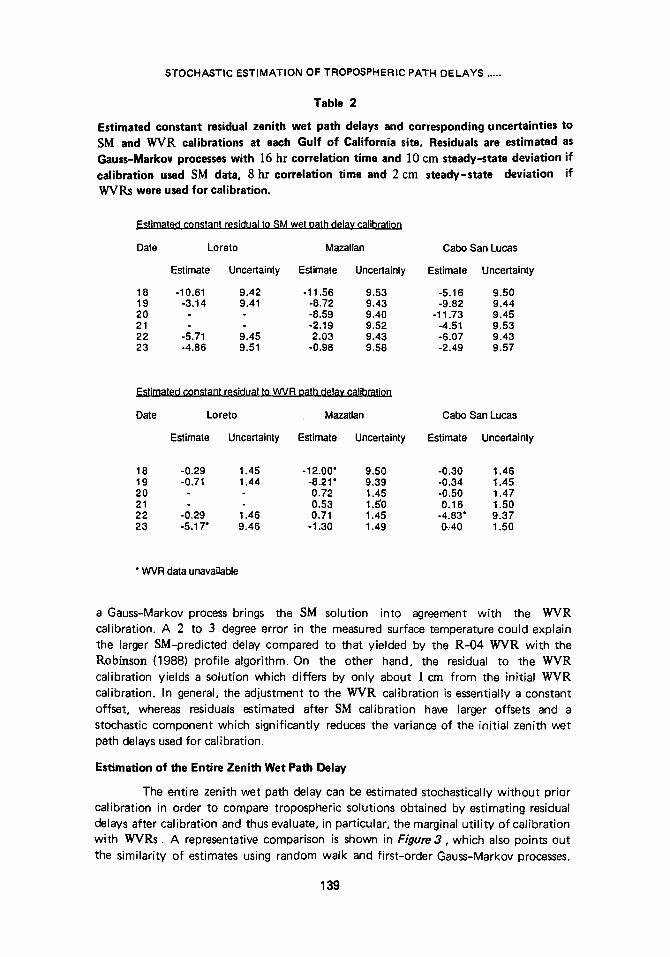
Constant offset residual delays estimated jointly with a Gauss-Markov process are typically less than ] cm, except for Mazatlan on November 23 (Table2). The uncertainties are about 1.5 cm and are controlled somewhat by a tradeoff with the specified steady-state deviation of the stochastic component of the residual delay model. Although the apriori constraint of the VV~'R offset term is only 2 cm, estimates may exceed this value depending on the relative data strength. Table2 suggests that the WVR calibration data for the gulf experiment are consistent and fairly accurate. Uncertainties in zenith wet delays determined with the Robinson (1988) profile algorithm range from 0.5 to 3 cm at Cabo San Lucas, 2 to 4cm at Mazatlan, and 0.2 to 0.5 cm at Limon, Liberia, and Grand Turk. These uncertainties are based on the derived system gain uncertainties, which depend on atmospheric conditions during measurements, and on the consequent quality of the tipping curves from which brightness temperatures are determined.
Zenith wet path delays predicted by the Chao (1973, 1974)atmospheric model similarly are assumed to have an error in the mean delay level. Table 2 also lists the constant offsets to SM-calibrated data. These mean residual delays are up to 12 cm, indicating that the zenith wet delays based on SM data are too high and inconsistent. Uncertainties of about 9.5 cm tradeoff with the steady-state deviation of the stochastic component (see table caption for stochastic parameter values). Figure 3 shows an offset of 5 to 9 cm between SM- and WVR-based zenith wet path delay calibrations at Mazatlan on November 20. Estimation of a residual zenith wet delay as
138
STOCHASTIC ESTIMATION OF TROPOSPHERIC PATH DELAYS .....
Table 2
Estimated constant residual zenith wet path delays and corresponding uncertainties to SM and WVR calibrations at each Gulf of California site. Residuals are estimated as Gauss-Markov processes with 16 hr correlation time and 10 cm steady-state deviation if calibration used SM data, 8 hr correlation time and 2 cm steady-state deviation if WVRs were used for calibration.
Estimate~ constant residual to SM wet oath delay calibration
Date Loreto Mazatlan Cabo San Lucas
Estimate Uncertainty Estimate Uncertainty Estimate Uncertainty
18 -10.61 9.42 -11,56 9.53 -5.16 9.50 19 -3.14 9.41 -8.72 9.43 -9.82 9.44 20 -8.59 9.40 -11.73 9.45 21 -2.19 9.52 -4.51 9.53 22 -5.71 9.45 2.03 9.43 -6.07 9.43 23 -4.86 9.51 -0.98 9.58 -2.49 9.57
Estimated constant residual to WVR oath detav calibration
Date Loreto Mazatlan Cabo San Lucas
Estimate Uncertainty Estimate Uncertainty Estimate Uncertainty
18 -0.29 1.45 -12.00" 9.50 -0.30 1.46 19 -0.71 1.44 -8.21" 9,39 -0.34 1.45 20 0.72 1,45 -0.50 1.47 21 0.53 1,5'0 0.16 1.50 22 -0.29 1.46 0.71 1,45 -4.83* 9.37 23 -5.17" 9.46 -1.30 1,49 0-:40 1,50
* WVR data unavailable
a Gauss-Markov process brings the SM solution into agreement wi th the WVR calibration. A 2 to 3 degree error in the measured surface temperature could explain the larger SM-predicted delay compared to that yielded by the R-04 WVR with the Robin_son (1988)prof i le algorithm. On the other hand, the residual to the WVR calibration yields a solution which differs by only about ] cm from the initial WVR calibration. In general, the adjustment to the WVR calibration is essentially a constant offset, whereas residuals estimated after SM calibration have larger offsets and a stochastic component which significantly reduces the variance of the initial zenith wet path delays used for calibration.
Estimation of the Entire Zenith Wet Path Delay
The entire zenith wet path delay can be estimated stochastically wi thout prior calibration in order to compare tropospheric solutions obtained by estimating residual delays after calibration and thus evaluate, in particular, the marginal ut i l i ty of calibration with WVRs. A representative comparison is shown in Figure 3 , which also points out the similarity of estimates using random walk and first-order Gauss-Markov processes.
139
35 I I I 1 I
- 1985 November 20 ~ - ~
B
33
31
g 29
;s 27 d a 25
23
D.M. TRALLI, S.M. LICHTEN
a
~- 21 - - - e
19 f b
~ 17 U
15 13
12 13 14 15 16 17 18
UTC (hrs)
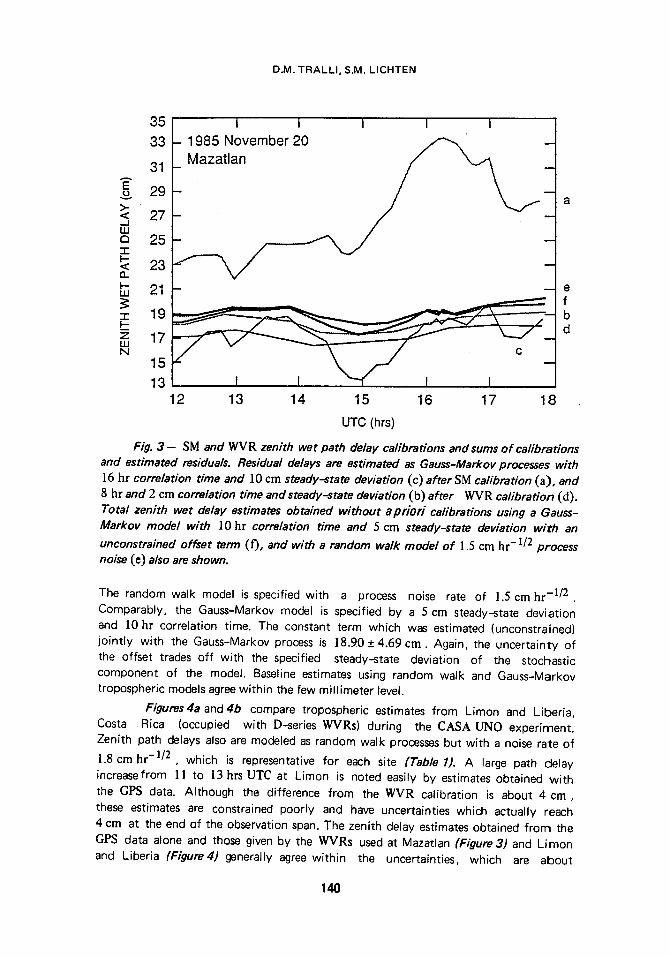
Fig. 3 - SM and WVR zenith wet path delay calibrations and sums of calibrations and estimated residuals. Residual delays are estimated as Gauss-Markov processes with ]6 hr correlation time and ]0 cm steady-state deviation (c) after SM calibration (a), and 8 hr and 2 cm correlation time and steady-state deviation (b) after V~R calibration (d). Total zenith wet delay estimates obtained without apr ior i calibrations using a Gauss- Markov model with ]0 hr correlation time and 5 cm steady-state deviation with an
unconstrained offset term ( f), and with a random walk model o f ! .5 cm hr- 1/2 process noise ( e ) also are shown.
The random walk model is specified with a process noise rate of 1.5 cm hr -1/2 . Comparably, the Gauss-Markov model is specified by a 5 cm steady-state deviation and l0 hr correlation time. The constant term which was estimated (unconstrained) jointly with the Gauss-Markov process is 18.90 + 4.69 cm. Again, the uncertainty of the offset trades off with the specified steady-state deviation of the stochastic component of the model. Baseline estimates using random walk and Gauss-Markov tropospheric models agree within the few millimeter level.
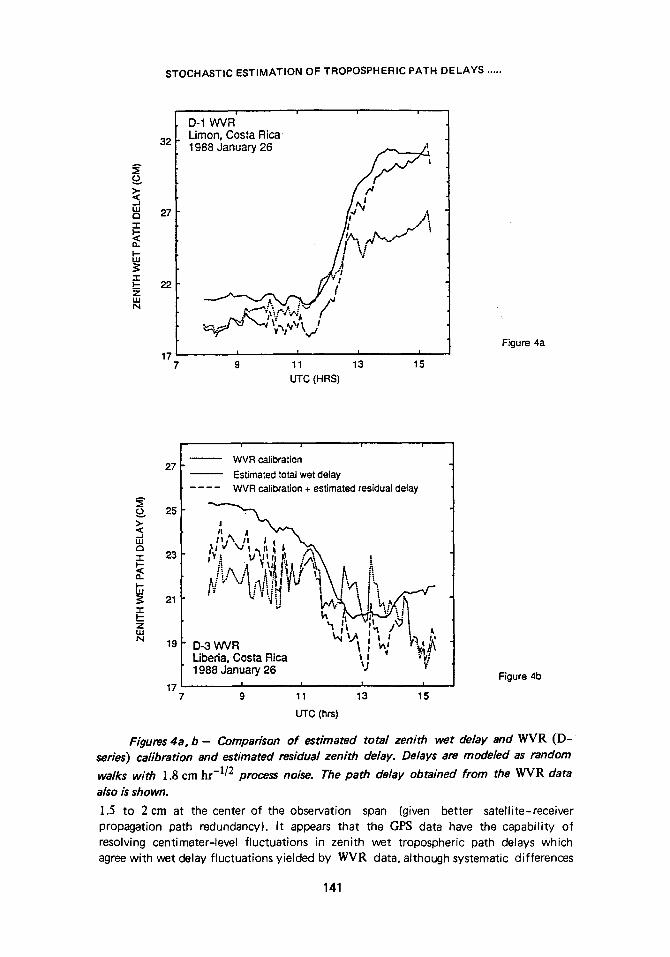
Figures4a and 4b compare tropospheric estimates from Limon and Liberia, Costa Rica (occupied with D-series VV'VRs) during the CASA UNO experiment. Zenith path delays also are modeled as random walk processes but with a noise rate of
1.8 cm hr - l /2 , which is representative for each site (Table 1). A large path delay increase from ] ] to 13hrs UTC at Limon is noted easily by estimates obtained with the GPS data. Although the difference from the WMR calibration is about 4 cm, these estimates are constrained poorly and have uncertainties which actually reach 4 cm at the end of the observation span. The zenith delay estimates obtained from the C, PS data alone and those given by the W'v'Rs used at Mazatlan (Figure3) and Lirnon and Liberia (Figure4) generally agree within the uncertainties, which are about
140
STOCHASTIC E S T I M A T I O N OF TROPOSPHERIC PATH D E L A Y S . . . . .
>- < - J L U E3 "I"
I - -
L U
-r
z LU N
32
27
22
17
i i 1
D-1 WVR Limon, Costa Rica 1988 January 26
Y/ ~ Ns j~
tl ~,.~'~ -~, v.y,~,~,~
1 l I I
9 11 13 15
UTC (HRS)
Figure 4a
1 i l i
. . . . . . WVR calibration 27
Estimated total wet delay
WVR calibration + estimated residual delay
25 >. <:
I
19 D-3 WVR Liberia, Costa Rica ~j ~ t~.~' 1988 January 26
Figure 4b 17 I ~ f w
9 11 13 15
UTC (hrs)
Figures 4a, b - Comparison of estimated total zenith wet delay and WVR (D- series) calibration and estimated residual zenith delay. Delays are modeled as random
walks with 1.8 cm hr -1/2 process noise. The path delay obtained from the WVR data also is shown.
].5 to 2 cm at the center of the observation span (given better satellite-receiver propagation path redundancy), It appears that the GPS data have the capability of resolving centimeter-level fluctuations in zenith wet tropospheric path delays which agree with wet delay fluctuations yielded by WVR data, although systematic differences
141
D.M. TRALLI, S.Mo LICHTEN
or biases of a few centimeters sometimes are present between the calibration and estimation schemes.
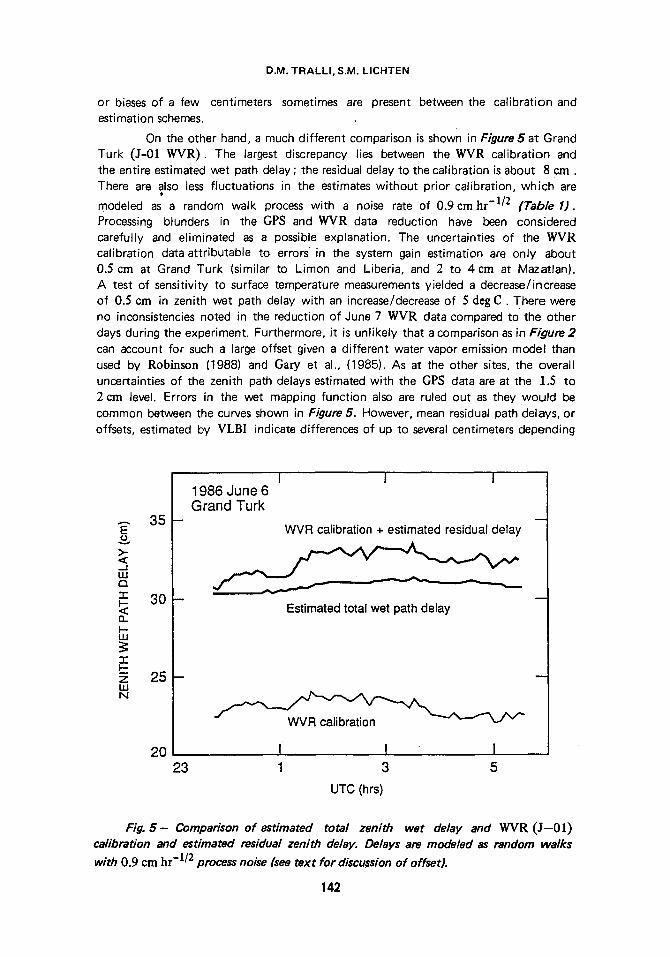
On the other hand, a much different comparison is shown in Figure 5 at Grand Turk (J-0] ~v 'R ) . The largest discrepancy lies between the WVR calibration and the entire estimated wet path delay ; the residual delay to the calibration is about 8 cm. There are also less fluctuations in the estimates without prior calibration, which are
modeled as a random walk process with a noise rate of 0.9 cm hr -1/2 (Table 1). Processing blunders in the GPS and WVR data reduction have been considered carefully and eliminated as a possible explanation. The uncertainties of the WVR calibration data attributable to errors' in the system gain estimation are only about 0.5 cm at Grand Turk (similar to Limon and Liberia, and 2 to 4cm at Mazatlan). A test of sensitivity to surface temperature measurements yielded a decrease/increase of 0.5 cm in zenith wet path delay with an increase/decrease of 5 deg C. There were no inconsistencies noted in the reduction of June 7 WVR data compared to the other days during the experiment. Furthermore, it is unlikely that a comparison as in Figure 2 can account for such a large offset given a different water vapor emission model than used by Robinson (1988) and Gary et al., (1985). As at the other sites, the overall uncertainties of the zenith path delays estimated with the GPS data are at the 1.5 to 2 cm level. Errors in the wet mapping function also are ruled out as they would be common between the curves shown in Figure 5. However, mean residual path delays, or offsets, estimated by VI.B[ indicate differences of up to several centimeters depending
35 E
>- < . - - I LU t7 -r- 30
F- u.I
- r I.- ~ 25 w N
20
I I I 1986 June 6 Grand Turk
WVR calibration + estimated residual delay
Estimated total wet path delay
I I I 23 1 3 5
UTC (hrs)
Fig. 5 - Comparison of estimated total zenith wet delay and WVR (3--01) calibration and estimated residual zenith delay. Delays are modeled as random walks
with 0,9 c m hr -1/2 process noise (see text for discussion of offset).
1 4 2
STOCHASTIC ESTIMATION OF TROPOSPHERIC PATH DELAYS .....
on elevation angle cutoff (E]gered et al., 1990), 'with the larger offsets corresponding to larger cutoff angles. This may explain a portion of the offset in Figure 5. The effects of decreasing the elevation angle cutoff from 15 deg has detrimental effects in GPS measurements if ground multipath becomes a dominant error source (Tra]ti et al., 1988). Except for admitting that the discrepancy in Figure 5 can not be resolved at this time, the only alternative is to doubt the accuracy of the WVR calibration given known cloudy conditions during the experiment. No WVR retrieval algorithm is accurate in cloudy conditions since clouds can either contribute to WVR antennae temperatures or be nearly opaque to radiation (although liquid water generally tends to increase optical depths) (Robinson, 1988).
In order to further evaluate apriori calibration with WVRs and its effect on baseline estimates and uncertainties, geodetic solutions are obtained without estimating residual zenith path delays. This approach ought to yield the strongest estimates overall, provided the calibrations are accurate, since the data then are used to estimate ten fewer parameters per hour of data per site (using 6 min normal points). Table3 lists the baseline component formal errors, repeatabilities, and differences in position estimates for the three gulf baselines with and without estimating residual zenith path delays after apriori WVR calibration. The differences in baseline formal errors are largest in the vertical component, with up to 1.5 cm reduction when residual zenith path delays are not estimated. The repeatability on the two Mazatlan baselines (350 and 650 km in length) is degraded due to a large outlier on November 23 (this station-day also yields the largest WVR residual offset, as listed in Table2). Baseline repeatability
Table 3
Baseline formal errors, repeatabilities, and differences in baseline positions (all in
centimeters) with and without estimation of stochastic residual delays to W V R calibrations.
Residual estimated:
Lomto-Mazatlan t650 km)
Mean formal error RMS repeatability
Position difference
East North Vertical Lenoth
Yes No Yes No Yes No Yes No
1.81 1.65 0.46 0.44 3.04 1.61 1.66 1.48 2.32 1.71 0.16 0.18 4.16 4.92 1.80 1,30
-1.05 0.03 -3.52 -0.84
Loreto-Cabo San Lucas t450 km]
Mean formal error 1.84 1.68 RMS repeatability 0.63 1.15
Position difference -0.14
Mazatlan-Cabo San Luca~ (350 km)
Mean formal error 1.83 1.67 RMS repeatability 1.50 0.97
Position difference 0.82
0.60 0.56 2.88 1.45 1.16 1.06 0.47 0.48 2.97 1.01 0.55 0.87
-0.09 3.85 0.12
0.62 0.58 2.79 1.19 1.76 1.61 0.38 0.60 1.99 6.41 1.54 0.89
-0.21 -1.94 -0.76
143
D.M. TRALLI, $.M. LICHTEN
worsens insignificantly in the north component. However, the improvement in east component repeatability when residual path delays are not estimated trades o f f with worsening of the vertical component repeatability for the two Mazatlan baselines, whereas the Loreto to Cabo San Eucas (450 kin) east component repeatability worsens while that of the vertical component improves. Vertical component position estimates differ by several centimeters, while horizontal component position estimates agree at the millimeter level in all cases except for the east component of the Loreto to Mazatlan baseline.
Baseline repeatabilities, presented in Table 3, correlate well with the variability of tropospheric path delay estimates and apparent offsets due to systematic errors. The
importance of estimating residual delays when using WVR data of this quality (uncertainties ranging from 0.5 to 4 cm) therefore is clear. Zenith delay calibration with errors consistently less than 1 cm on time scales of a few minutes (comparable to the data sampling interval) are required, with a similar accuracy on the mean delay level, before calibration without residual delay estimation is viable. In the meanwhile, estimation of zenith wet path delays without prior calibration yields comparable, if not better, baseline repeatabilities.
Estimation of the Combined Zenith Wet and Dry Path Delays
Up to this point, only the zenith wet tropospheric path delay has been estimated simultaneously with the geodetic parameters, either entirely or as a residual correction to an apriori calibration based on SM or WVR data. In this section, an argument is presented for estimating the total, or combined wet and dry, delay at zenith without any apriori wet or dry delay calibrations. Normally, if the zenith dry path delay behaves comparably to the wet delay or shows smaller-scale fluctuations, the dry delay fluctuations are encompassed readily in the stochastic parameterization of the corresponding zenith wet path delay. The SM data in this study indicate that the dry component of the troposphere typically behaves very stably over the satellite observation periods (Table 1), with uncertainties in zenith dry path delays typically ranging from ] to 2 mm. The calculated process noise rates are an order of magnitude smaller for the zenith dry delays than for the wet delays, and are repeatable over the span of each experiment. Estimation of the total path delay is much like estimating the entire wet delay, but the mapping function dependencies must be looked at carefully.
Following Lanyi (1984), the tropospheric path delay,along an arbitrary elevation angle (E) is expressed as a function of dry and wet delays at zenith which scale as the cosine of the elevation angle, and ray bending terms which scale as the cotangent squared. (see Lanyi (1984) and Sovers and Border (1987)). Without the contributions from ray bending, the partial derivatives of the path delay with respect to the delays at zenith are approximated by
0 ~ Fdry (E)
PZdry sin E
ap Fwe t (E)
a pzwe t sin E
(13a)
(13b)
144
STOCHASTIC ESTIMATION OF TROPOSPHERIC PATH DELAYS .....
where (Fwet) and dry (Fdry) are respectively the wet and dry components of the
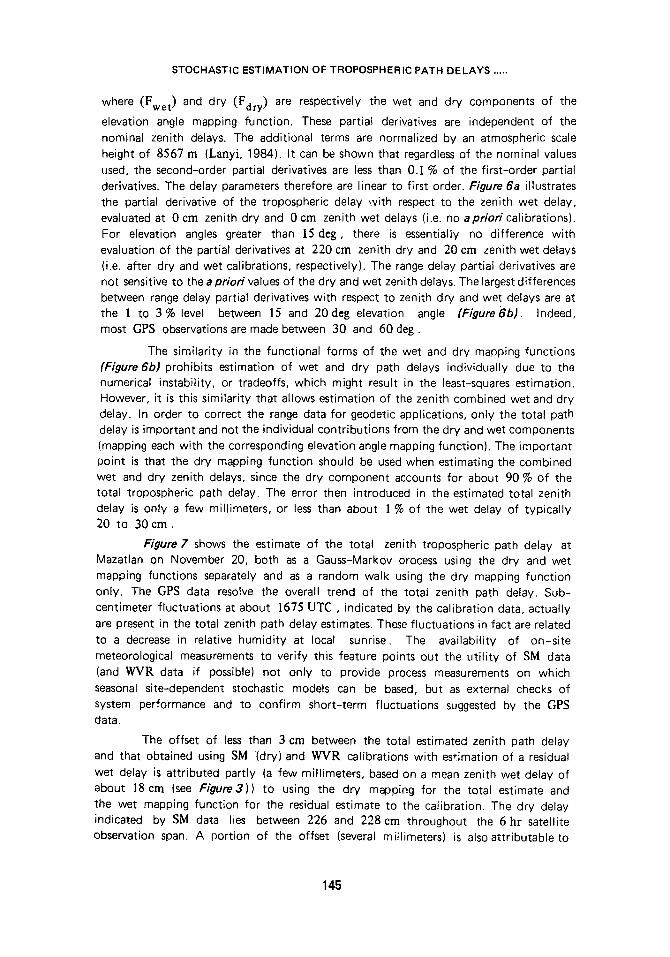
elevation angle mapping function. These partial derivatives are independent of the nominal zenith delays. The additional terms are normalized by an atmospheric scale height of 8567 m (Lanyi, 1984). It can be shown that regardless of the nominal values used, the second-order partial derivatives are less than 0.I % of the first-order partial derivatives. The delay parameters therefore are linear to first order. Figure 6a illUstrates the partial derivative of the tropospheric delay with respect to the zenith wet delay, evaluated at 0 cm zenith dry and 0 cm zenith wet delays (i.e. no apriori calibrations). For elevation angles greater than 15 deg, there is essentially no difference with evaluation of the partial derivatives at 220 cm zenith dry and 20 cm zenith wet delays (i.e. after dry and wet calibrations, respectively). The range delay partial derivatives are not sensitive to the apriori values of the dry and wet zenith delays. The largest differences between range delay partial derivatives with respect to zenith dry and wet delays are at the 1 to 3 % level between 15 and 20 deg elevation angle (Figure6b). Indeed, most GPS observations are made between 30 and 60 deg.
The similarity in the functional forms of the wet and dry mapping functions (Figure 6b) prohibits estimation of wet and dry path delays individually due to the numerical instability, or tradeoffs, which might result in the least-squares estimation. However, it is this similarity that allows estimation of the zenith combined wet and dry delay. In order to correct the range data for geodetic applications, only the total path delay is important and not the individual contributions from the dry and wet components (mapping each with the corresponding elevation angle mapping function). The important point is that the dry mapping function should be used when estimating the combined wet and dry zenith delays, since the dry component accounts for about 90 % of the total tropospheric path delay. The error then introduced in the estimated total zenith delay is only a few millimeters, or less than about 1% of the wet delay of typically 20 to 30cm.
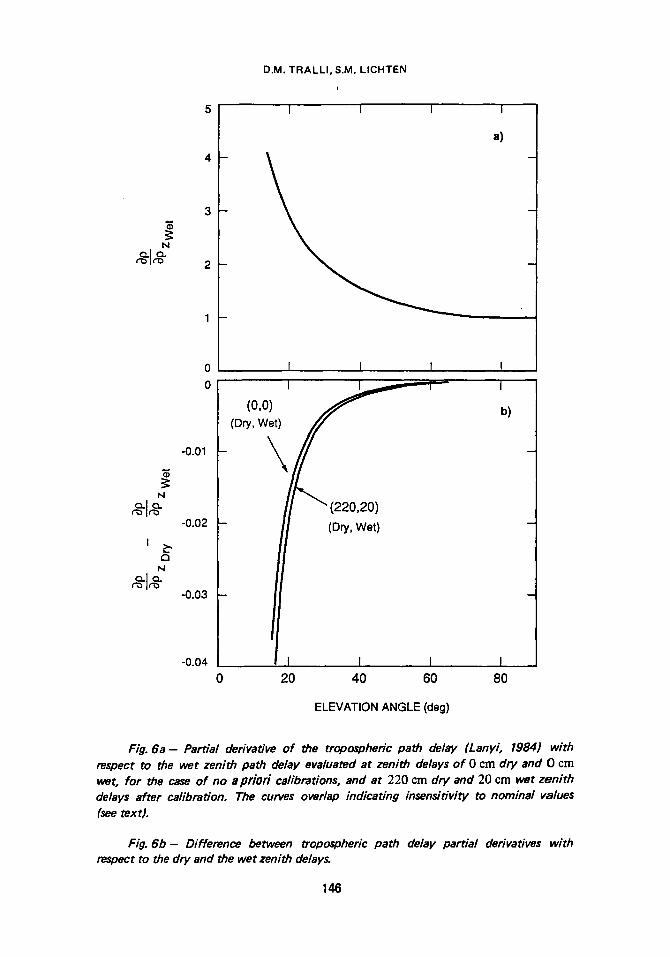
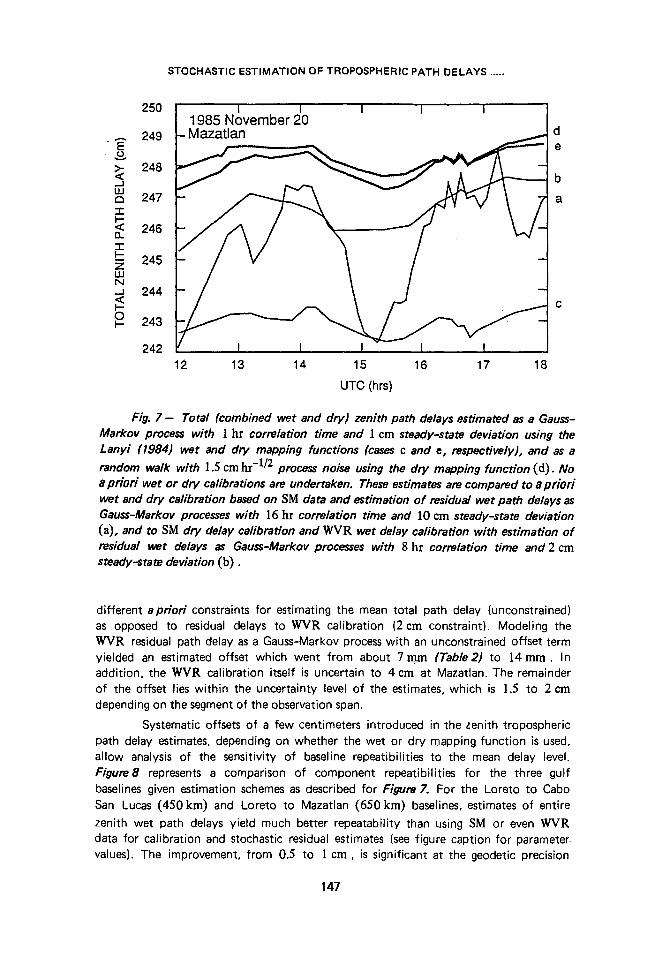
Figure 7 shows the estimate of the total zenith tropospheric path delay at Mazatlan on November 20. both as a Gauss-Markov process using the dry and wet mapping functions separately and as a random walk using the dry mapping function only. The GPS data resolve the overall trend of the total zenith path delay. Sub- centimeter fluctuations at about ]675 UTC, indicated by the calibration data, actually are present in the total zenith path delay estimates. These fluctuations in fact are related to a decrease in relative humidity at local sunrise. The availability of on-site meteorological measurements to verify this feature points out the util ity of SM data (and WVR data if possible) not only to provide process measurements on which seasonal site-dependent stochastic models can be based, but as external checks of system performance and to confirm short-term fluctuations suggested by the GPS data.
The offset of less than 3 cm between the total estimated zenith path delay and that obtained using SM (dry) and WVR calibrations with estlmation of a residual wet delay is attributed partly (a few millimeters, based on a mean zenith wet delay of about ]8 cm (see Figure3)) to using the dry mapping for the total estimate and the wet mapping function for the residual estimate to the calibration. The dry delay indicated by SM data l ies between 226 and 228 cm throughout the 6 hr satellite observation span. A portion of the offset (several millimeters) is also attr ibutableto
145
N Q,. r
,~ J,,"o 2
-0.01
N
-0.02
I
N CL CL
-0.03
-0.04
4 -
3 -
D.M. TRALLI, S.M. LICHTEN
i
I I I
a )
I I 1 I
I
(0,0) b) (Dry, Wet)
_ // -(220,20)
m
t t I I 0 2O 4O 60 80
ELEVATION ANGLE (deg)
Fig. 6 a - Partial derivative of the tropospheric path delay (Lanyi, 1984) with respect to the wet zenith path delay evaluated at zenith delays of 0 cm dry and 0 cm wet, for the case of no a priori calibrations, and at 220 cm dry and 20 cm wet zenith delays after calibration. The curves overlap indicating insensitivity to nominal values (see text).
Fig. 6 b - Difference between tropospheric path delay partial derivatives with respect to the dry and the wet zenith delay&
146
STOCHASTIC ESTIMATION OF TROPOSPHERIC PATH DELAYS .....
250 I I I I I 1 I | 1985 Novembe r 20 |
249 d e
~ 248 d b c~ 247 a
n < 246
~ 245 N ~: 244
C O~ 243
242
. ~ 249
12 13 14 15 16 17
UTC (hrs)
18
Fig. 7 - Total (combined wet and dry) zenith path delays estimated as a Gauss- Markov process with 1 hr correlation time and I cm steady-state deviation using the Lanyi (1984) wet and dry mapping functions (cases c and e, respectively), and as a
random walk with ] .5 cm hr -1/2 process noise using the dry mapping function (d). No a priori wet or dry calibrations are undertaken. These estimates are compared to a pr ior i wet and dry calibration based on SM data and estimation of residual wet path delays as Gauss-Markov processes with 16 hr correlation time and 10 cm steady-state deviation (a), and to SM dry delay calibration and WVR wet delay calibration with estimation of residual wet delays as Gauss-Markov processes with 8 hr correlation time and 2 cm steady-ste te deviation (b) .
different aprior i constraints for estimating the mean total path delay (unconstrained) as opposed to residual delays to WVR calibration (2 cm constraint). Modeling the WVR residual path delay as a Gauss-Markov process with an unconstrained offset term yielded an estimated offset which went from about 7ram (Table2) to ] 4 r a m . In addition, the WVR calibration itself is uncertain to 4 cm at Mazatlan. The remainder of the offset lies within the uncertainty level of the estimates, which is 1.5 to 2 cm depending on the segment of the observation span.
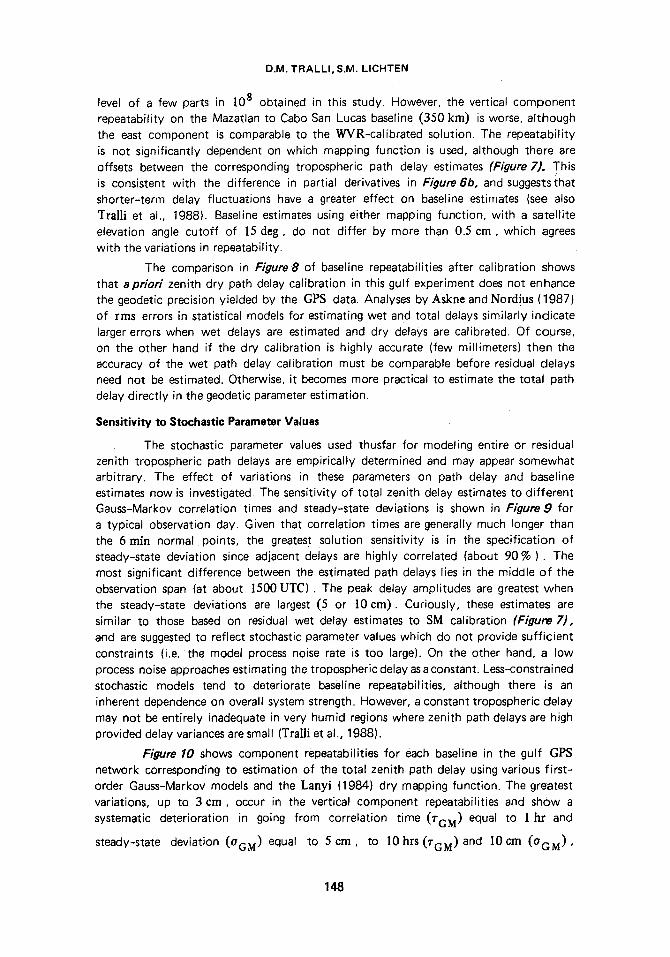
Systematic offsets of a few centimeters introduced in the zenith tropospheric path delay estimates, depending on whether the wet or dry mapping function is used, allow analysis of the sensitivity of baseline repeatibilities to the mean delay level. Figure8 represents a comparison of component repeatibilities for the three gulf baselines given estimation schemes as described for Figure 7. For the Loreto to Cabo San Lucas (450 kin) and Loreto to Mazatlan (650 kin) baselines, estimates of entire
zenith wet path delays yield much better repeatability than using SM or even WVR data for calibration and stochastic residual estimates (see figure caption for parameter. values). The improvement, from 0.5 to ] cm, is significant at the geodetic precision
147
D.M. TRALLI, S.M. LICHTEN
level of a few parts in 308 obtained in this study. However, the vertical component repeatability on the Mazatlan to Cabo San Lucas baseline (350 kin) is worse, although the east component is comparable to the WVR-calibrated solution. The repeatability is not significantly dependent on which mapping function is used, although there are offsets between the corresponding tropospheric path delay estimates (Figure 7). This is consistent with the difference in partial derivatives in Figure 6b, and suggests that shorter-term delay fluctuations have a greater effect on baseline estimates (see also TraUi et al., 1988). Baseline estimates using either mapping function, with a satellite elevation angle cutoff of 35 deg, do not differ by more than 0.5 cm, which agrees with the variations in repeatability.
The comparison in Figure8 of baseline repeatabilities after calibration shows that apriori zenith dry path delay calibration in this gulf experiment does not enhance the geodetic precision yielded by the GPS data. Analyses by Askne and Nordius (1987) of rms errors in statistical models for estimating wet and total delays similarly indicate larger errors when wet delays are estimated and dry delays are calibrated. Of course, on the other hand if the dry calibration is highly accurate (few millimeters) then the accuracy of the wet path delay calibration must be comparable before residual delays need not be estimated. Otherwise, it becomes more practical to estimate the total path delay directly in the geodetic parameter estimation.
Sensitivity to Stochastic Parameter Values
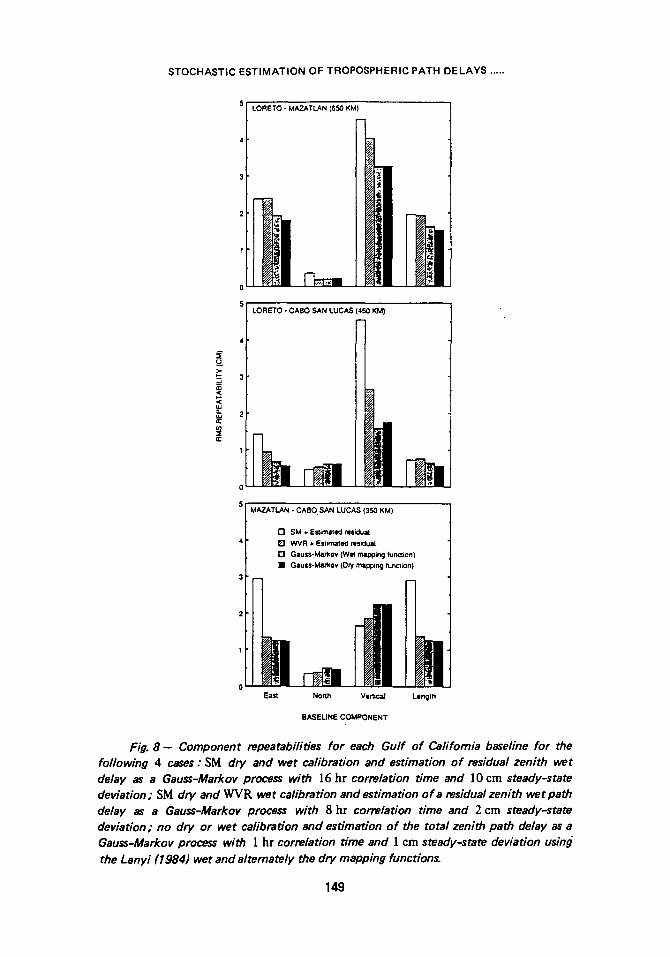
The stochastic parameter values used thusfar for modeling entire or residual zenith tropospheric path delays are empirically determined and may appear somewhat arbitrary. The effect of variations in these parameters on path delay and baseline estimates now is investigated. The sensitivity of total zenith delay estimates to different Gauss-Marker correlation times and steady-state deviations is shown in Figure 9 for a typical observation day. Given that correlation times are generally much longer than the 6 rain normal points, the greates t solution sensitivity is in the specification of steady-state deviation since adjacent delays are highly correlated (about 90% ). The most significant difference between the estimated path delays lies in the middle of the observation span (at about 3500 UTC) . The peak delay amplitudes are greatest when the steady-state deviations are largest (5 or 30 cm). Curiously, these estimates are similar to those based on residual wet delay estimates to SM calibration (Figure 7), and are suggested to reflect stochastic parameter values which do not provide sufficient constraints (i.e. t he model process noise rate is too large). On the other hand, a low process noise approaches estimating the tropospheric delay as a constant. Less-constrained stochastic models tend to deteriorate baseline repeatabilities, although there is an inherent dependence on overall system strength. However, a constant tropospheric delay may not be entirely inadequate in very humid regions where zenith path delays are high provided delay variances are small (Tra]|i et al., 1988).
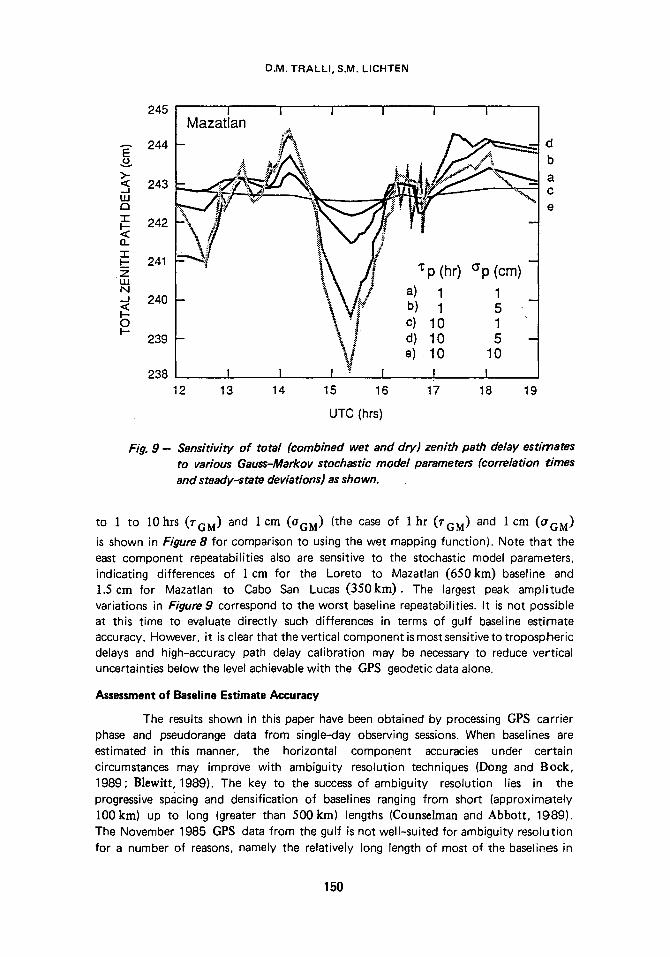
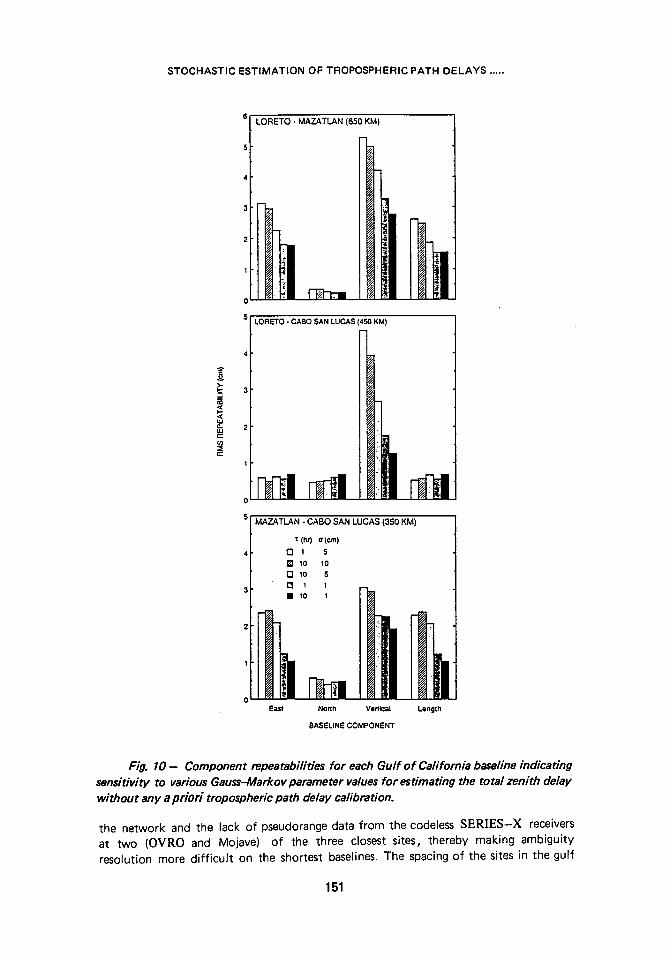
Figure 10 shows component repeatabilities for each baseline in the gulf GPS network corresponding to estimation of the total zenith path delay using various first- order Gauss-Markov models and the Lanyi (1984) dry mapping function. The greatest variations, up to 3 cm, occur in the vertical component repeatabilities and show a systematic deterioration in going from correlation time (~GM) equal to 3 hr and
steady-state deviation (OGM) equal to 5 cm, to 10hrs (TGM) and 30 cm ( a G M ) ,
148
STOCHASTIC ESTIMATION OF TROPOSPHERIC PATH DELAYS .....
LORETO - MAZATLAN (650 KM)
A
.J
LORETO - CABO SAN LUCAS (450 KM)
1 MAZATLAN - CABO. SAN LUCAS (350 KM)
I"1 SM § Esfimatlr residual
O WVR �9 Eztimat~l residuld
[ ] Gauss-Markov (W~ n ~ n g func~on)
�9 Gau|s-Ma~ov (Dry mapping function)
o East Norlh VerlJr Length
BASELINE COMPONENT
Fig. 8 - Component repeatabilities for each Gulf of Cafifomia baseline for the following 4 cases : SM dry and wet calibration and estimation of residual zenith wet delay as a Gauss-Markov process with ]6 hr correlation time and ]0 cm steady-state deviation; SM dry and WVR wet calibration and estimation of a residual zenith wet path delay as a Gauss-Markov process with 8 hr correlation time and 2 cm steady-state deviation; no dry or wet calibration and estimation of the total zenith path delay as a Gauss-Markov process with 1 hr correlation ffme and 1 cm steady-state deviation using the Lanyi (1984) wet and altemately the dry mapping functions.
149
D.M. T R A L L I , S . M . L ICHTEN
245
244 E
>- <~ 243 LU a " r
242 < 13. '1" ~- 241
LU N -J 240 < I- O 1-
239
238
I I I 1 I I Mazatlan
"~p (hr) Op (cm) 1
- , o -
~t e) 10 10
I 1 I I t I 12 13 14 15 16 17 18 19
UTC (hrs)
d b a
C
e
Fig. 9 - Sensitivity of total (combined wet and dry) zenith path delay estimates to various Gauss-Markov stochastic model parameters (correlation times and steady-state deviations) as shown.
to 1 to 10hrs (TGM) and ] cm (OGM) (the case of 1 hr (rGM) and 1 cm (~rGM)
is shown in Figure 8 for comparison to using the wet mapping function). Note that the east component repeatabilities also are sensitive to the stochastic model parameters, indicating differences of I cm for the Loreto to Mazatlan (650kin) baseline and 1.5cm for Mazatlan to Cabo San Lucas (350kin). The largest peak amplitude variations in Figure 9 correspond to the worst baseline repeatabilities. It is not possible at this time to evaluate directly such differences in terms of gulf baseline estimate accuracy. However, it is clear that the vertical component is most sensitive to tropospheric delays and high-accuracy path delay calibration may be necessary to reduce vertical uncertainties below the level achievable with the GPS geodetic data alone.
Assessment o f Basel ine E s t i m a t e A c c u r a c y
The results shown in this paper have been obtained by processing GPS carrier phase and pseudorange data from single-day observing sessions. When baselines are estimated in this manner, the horizontal component accuracies under certain circumstances may improve with ambiguity resolution techniques (Dong and Bock, 1989; Blewitt, 1989). The key to the success of ambiguity resolution lies in the progressive spacing and densification of baselines ranging from short (approximately 100km) up to long (greater than 500 kin) lengths (Counselman and Abbott, 1989). The November 1985 GPS data from the gulf is not well-suited for ambiguity resolution for a number of reasons, namely the relatively long length of most of the baselines in
1 5 0
S T O C H A S T I C E S T I M A T I O N OF T R O P O S P H E R I C P A T H D E L A Y S .....
1
LORETO - MAZATLAN (650 KM)
h 15 LORETO - CABO SAN LUCAS (450 KM)
MAZATLAN - CABO SAN LUCAS (350 KM)
1: (hr) a(cm)
r-1 1 5
[ ] 10 10
[ ] lo 5 m 1 1
East North Vertical Length
BASELINE COMPONENT
Fig . 1 0 - - Component repeatabilities for each Gulf of California baseline indicating sensitivity to various Gauss-Markov parameter values for estimating the total zenith delay without any a priori tropospheric path delay calibration.
the network and the lack of pseudorange data from the codeless SERIES-X receivers at two (OVRO and Mojave) of the three closest sites, thereby making ambiguity resolution more difficult on the shortest baselines. The spacing of the sites in the gulf
151
D.M. TRALLI, S.M. LICHTEN
and the presence of frequent data gaps from these sites (Tralli et al., 1988) further hinder ambiguity resolution.
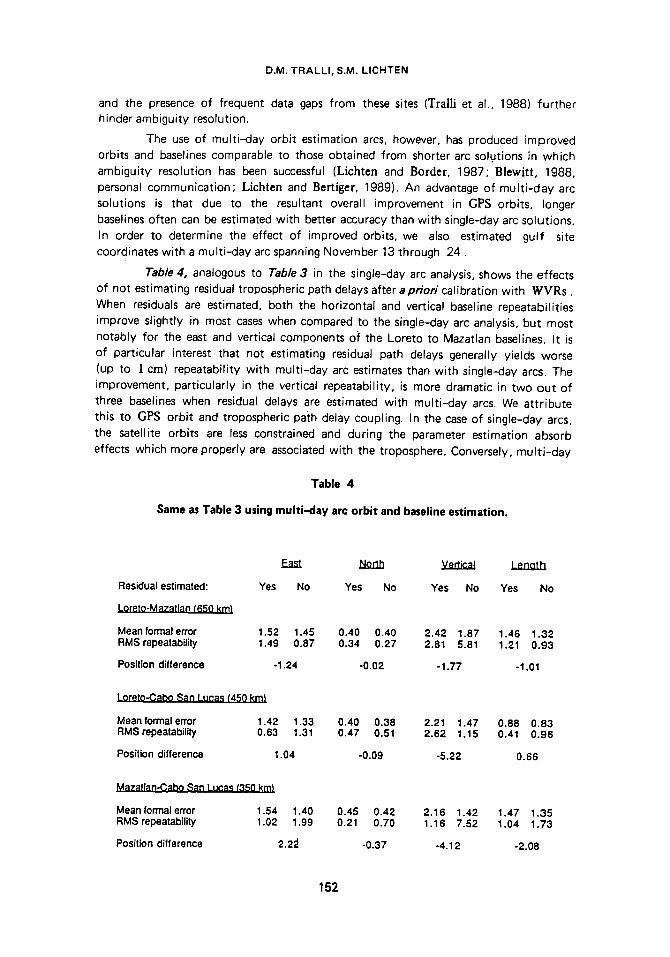
The use of multi-day orbit estimation arcs, however, has produced improved orbits and baselines comparable to those obtained from shorter arc solutions in which ambiguity resolution has been successful (Lichtcn and Border, 1987; Blewitt, 1988, personal communication; Lichten and Bertiger, 1989). An advantage of mult i -day arc solutions is that due to the resultant overall improvement in GPS orbits, longer baselines often can be estimated with better accuracy than with single-day arc solutions. In order to determine the effect of improved orbits, we also estimated gulf site coordinates with a multi-day arc spanning November 13 through 24.
Table 4, analogous to Table 3 in the single-day arc analysis, shows the effects of not estimating residual tropospheric path delays after a priori calibration with WVRs. When residuals are estimated, both the horizontal and vertical baseline repeatabilities improve slightly in most cases when compared to the single-day arc analysis, but most notably for the east and vertical components of the Loreto to Mazatlan baselines. It is of particular interest that not estimating residual path delays generally yields worse (up to 1 cm) repeatability with multi-day arc estimates than with single-day arcs. The improvement, particularly in the vertical repeatability, is more dramatic in two out of three baselines when residual delays are estimated with multi-day arcs. We attribute this to GPS orbit and tropospheric path delay coupling. In the case of single-day arcs, the satellite orbits are less constrained and during the parameter estimation absorb effects which more properly are associated with the troposphere. Conversely, mult i-day
Table 4
Same as Table 3 using mult i -day arc orbit and baseline estimation.
Residual estimated:
Loreto-Mazatlan (650 krp}
Mean formal error RMS repeatability
Position difference
East North Vertical Lenat h
Yes No Yes No Yes No Yes No
1.52 1.45 0.40 0.40 2.42 1.87 1.46 1.32 1.49 0.87 0.34 0.27 2.81 5.81 1.21 0.93
ol .24 -0.02 -1.77 -1.01
Loreto-Cabo San Lucas f450 km)
Mean formal error 1.42 1.33 RMS repeatability 0.63 1.31
Position difference 1.04
Mazatlan-Cabo San Lucas ~'350 kin)
Mean formal error 1.54 1.40 RMS repeatability 1.02 1.99
Position difference 2.2~
0.40 0.38 2.21 1.47 0.88 0.83 0.47 0.51 2.62 1.15 0.41 0.96
-0.09 -5.22 0.66
0.45 0.42 2.16 1.42 1.47 1.35 o.21 0.70 1.16 7.52 1.04 1.73
-0.37 -4.12 -2.o8
152
STOCHASTIC ESTIMATION OF TROPOSPHERIC PATH DELAYS .....
arcs, by virtue of improved orbit estimates, are less free to incorporate tropospheric errors. However, baseline repeatabilities are not significantly different between single- and multi-day arcs in these results (except for the Loreto to Mazatlan baseline).
Since MLB[ or SLR measurements of the gulf baselines presently are not available, we could not compare the GPS-determined baselines directly with independent space geodetic measurements. Although Tables 3 and 4 show centimeter-level precision for these baselines, as indicated by the daily repeatabilities, the accuracy of the GPS measurements still could be affected by systematic errors. One such systematic error might be tropospheric path delay mismodeling from mapping function errors. However, we believe this had relatively little effect on the baseline estimates, since this type of error probably would not repeat from one day to the next when the weather conditions vary. The fine level of baseline agreement from day to day seems to indicate that such systematic errors were relatively small.
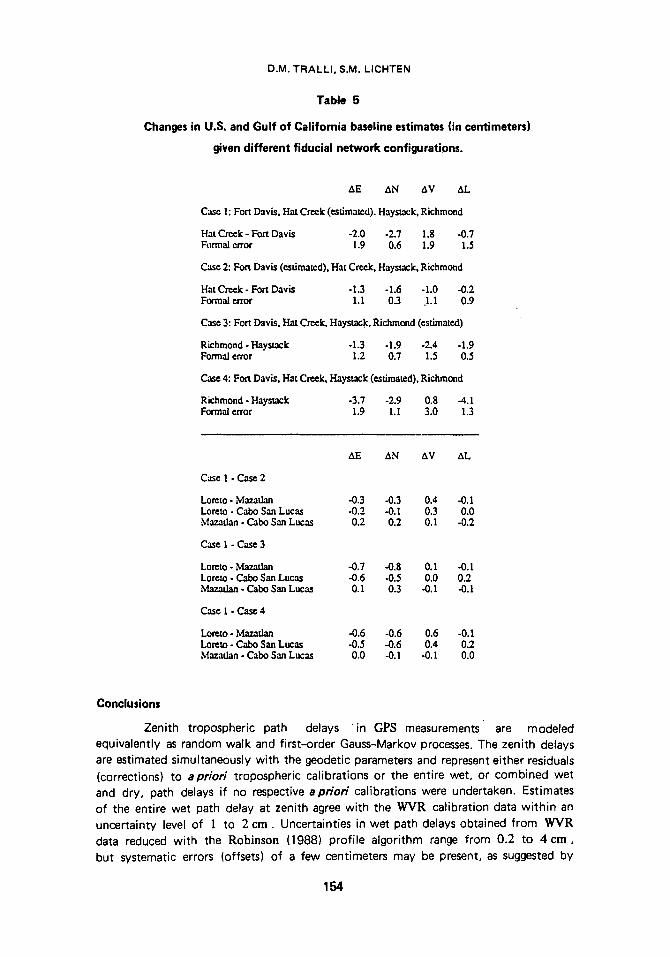
Another systematic error could result from the GPS satellite orbits. The major source of systematic orbit error is probably fiducial coordinate errors. To determine how significant these fiducial errors might be, we repeated the ]2-day arc orbit and baseline estimations using all four possible combinations of three fiducials chosen from a site at Hat Creek, CA, and IRIS sites at Fort Davis, TX, Richmond, FL, and Haystack, MA, while the coordinates of the remaining otherwise fiducial site were estimated along with the GPS orbits and the coordinates of the gulf and other (OVRO and Mojave) sites. For the multi-day arc analysis, Hat Creek rather than OVRO or Mojave is used as a fiducial, which gives better north-south fiducial network geometry. This is not expected to introduce significant differences given that repeated analyses of data from 1985 through 1988 show centimeter-level agreement between GPS and VLB[ for the Mojave-OVRO (245 kin) and Mojave-Hat Creek (729km) baselines (Lichten et al., 1989). Each of the four estimations provided a measurement of a 2000kin baseline which has been independently measured by MLB[. As shown in
Table 5, the GPS-VLB[ agreement is better than 2.5 cm, or 1.5 parts in ]08 , in all three vector components, except for when Haystack was adjusted and solutions
agree to 2 parts in ]08 . However, in this latter case the formal computed error of the fit is larger (especially in the vertical component) than in the other cases due to the weakened geometry which results from not using Haystack as a fiducial site.
Since the North American baselines estimated simultaneously with those in the gulf agree with VLB] , we have high confidence in the accuracy, as well as the precision, of the gulf baseline estimates themselves. A more direct check on the effect of fiducial error on gulf baseline estimates shows that between any two North American fiducial network configurations, the differences in gulf baseline estimates vary by less than ] cm in any given component (Table5). This result, in addition to the very small daily repeatabilities obtained with either single-day or multi-day estimation arcs, indicate that it is unlikely that the CP$ baseline estimates and corresponding tropospheric path delay estimates are affected significantly by systematic errors.
153
D.M. TRALLI, S.M. LICHTEN
Table 5
Changes in U.S. and Gulf of California baseline estimates (in centimeters)
given different fiducial network configurations.
AE AN AV AL
Casr 1: Fort Davis, Hat Creek (estimated). Haystack, Richmond
Hat Creek - Fort Davis -2.0 -2.7 1.8 -0.7 Formal error 1.9 0.6 1.9 1.5
Case 2: Fort Davis (estimated), Hat Creek, Haystack, Richmond
Hat Creek - Fort Davis -1.3 -1.6 -1.0 -0.2 Formal error 1.1 0.3 1.1 0.9
Case 3: Fort Davis, Hat Creek, Haystack, Richmond (estimate.d)
Richmond - Haystack -1.3 -1.9 -2.4 -1.9 Formal error 1.2 0.7 1.5 0.5
Case 4: Fort Davis, Hat Creek, Haystack (estimated), Richmond
Richmond - Haystack -3.7 -2.9 0.8 -4.1 Formal error 1.9 1. I 3.0 1.3
Case I - Case 2
AE AN AV AL
Lomto - Mazatlan -0.3 -0.3 0.4 -0.1 Lorcto - Cabo San Lucas -0.2 -0.1 0.3 0.0 Mazadan - Cabo San Lucas 0.2 0.2 0.1 -0.2
Case 1 - Case 3
Loreto - ~ffftT~rl:~q -0.7 -0.8 0.1 -0.1 Lorcto - Cab(3 San Lucas -0.6 -0.5 0.0 0.2 Ma~a~!~,~ - Cabo San Lucas 0.1 0.3 -0.1 -0.1
Case I - C a ~ 4
Lore.to - Mazadan .0.6 -0.6 0.6 -0.1 Loreto - Cabo San Lucas -0.5 -0.6 0.4 0.2 Mazadan - Cabo San Lucas 0.0 -0.1 -0. I 0.0
Conclusions
Zenith tropospheric path delays i n GPS measurements are modeled equivalently as random walk and first-order Gauss-Markov processes. The zenith delays are estimated simultaneously with the geodetic parameters and represent either residuals (corrections) to apriori tropospheric calibrations or the entire wet, or combined wet and dry, path delays if no respective apriori calibrations were undertaken. Estimates of the entire wet path delay at zenith agree with the WVR calibration data within an uncertainty level of 1 to 2 cm. Uncertainties in wet path delays obtained from WVR data reduced with the Robinson (1988) profile algorithm range from 0.2 to 4 cm, but systematic errors (offsets) of a few centimeters may be present, as suggested by
154
STOCHASTIC ESTIMATION OF TROPOSPHERIC PATH DELAYS .....
comparison to path delay estimates obtained entirely with the GPS data. Stochastic estimation of the combined wet and dry zenith delays without any apriori calibration yields geodetic results which are comparable to or better than those obtained after apriori calibration based on surface barometric pressure measurements for the hydrostatic component and WVRs for the wet component of the delay. The baseline
repeatability, or geodetic precision, is a few parts in 108 . Comparison of baseline estimates between otherwise fiducial sites in North America and independent VLB[ estimates indicates a comparable level of accuracy. This study suggests that it is not necessary to measure meteorological parameters in the field during GPS experiments provided atmospheric conditions are not extreme and some quantitative measure of the tropospheric path delay is available from previous surface meteorological (SM) or WVR data for a given site. Variations in stochastic parameter values determined from SM-based wet and dry path delays and WVR-based wet delays during three GPS geodetic experiments in different geographic regions, where wet deiays exceeded 20 to 30 cm, proved to be less than an order of magnitude.
The geodetic baseline estimates suggest that GPS data alone have potential for resolving centimeter-level fluctuations in zenith tropospheric path delays over periods of a few minutes, The accuracy requirement on wet and dry tropospheric path delay calibration is dictated by the resolving power of the particular geodetic data set. Geodetic baseline precision in this study is dominated by the fluctuation level of the delays rather than the mean delay level. From these analyses, it appears that tropospheric calibrations (combined wet and dry) must be accurate to a level of about 5 to 10 mm at zenith in order to provide useful a priori constraints for highly precise and accurate geodetic parameter estimation, and to eliminate the need to estimate corrections or residual path delays.
Studies are in progress to compare GPS zenith tropospheric path delay estimates with independent tropospheric path delay estimates from VLB! data, possibly yielding information on other systematic GPS errors (Tra]!i et al., 1990). Although direct estimation of the entire delay at a site may be desirable, particularly for real-time applications of GPS, the use of highly-accurate WVRs may prove very important in order to constrain errors on the vertical baseline component. More work is needed in this area, with particular attention given to GPS network design in order to first minimize uncertainties in horizontal baseline components. Line-of-sight WVR data may prove desirable in future experiments. Of course, resolution of tropospheric path delays with GPS data will increase with better sky coverage and consequent greater path redundancy yielded by a full satellite constellation and receivers capable of tracking more than four satellites simultaneously.
Acknowledgements
This research was carried out at the Jet Propulsion Laboratory, California
Institute of Technology, under contract with the National Aeronautics and Space Administration, and was supported by the Geodynamics Program. All computations
were conducted at the Jet Propulsion Laboratory using the GIPSY analysis software. We thank T.H. Dixon and G. Blewitt for helpful discussions, and M. Cerezo,
G.M, Gonza|ez, and S. Kornreich Wolf for contributing figures. Many of the analyses resulted after conversations on W V R evaluation with T.A. Herring and T .H .C |a rk as part of the N A S A Working Group on Water Vapor Radiometry. Special thanks
155
D.M. TRALLI , S.M. LICHTEN
are given to S.J. Walter for add i t iona l discussions on WVR retr ieval a lgor i thm errors
and concerns which must be addressed before assessing fair ly the value of WVRs. in
geodet ic appl icat ions.
O O
RE.FE RENCES
J.B. ABSHIRE and C.S. GARDNER, 1985 : Atmospheric refractivity corrections in satellite laser ranging, IEEE, Trans. Geosci. Remote Sensing, 23, pp. 414-425.
J.W. ARMSTRONG, and R.A. SRAMEK, 1982 : Observations of tropospheric phase sr at 5 GHz on vertical paths, Radio Sci., 17, pp. 1579--1586.
J. ASKNE, and H. NORDIUS, 1987 : Estimation of tropospheric delay for microwaves from surface weather data. Radio Science, 22, pp. 379--386.
B. BECKMAN, 1985 : A water-vapor radiometer error model. IEEE Trans. Geosci. Remote Sens, GE-23, No. 4, pp. 474-478.
A.L. BERMAN, 1970 : A new tropospheric range refraction model, in The Deep Space Network, Space Programs Summary 37--65, II, pp. 140-153. Jet Propulsion Laboratory, Pasadena, CA.
G.J. BIERMAN, 1977 : Factorization Methods for Discrete Sequential Estimation. Academic Press, New York, NY., 241 p.
G. BLEWlTT, 1989 : Carrier phase ambiguity resolution for the Global Positioning System applied to geodetic baselines up to 2000 km,J. Geophys. Res., 94, pp. 10187-10203.
G.H. BORN, D.B. LAME, and J.M. MITCHELL, 1984a : Asurvey of oceanographic satellite altirnetric missions, Marine Geodesy, 8, pp. 3-16.
G.H. BORN, C. WUNSCH, and C.A. YAMARONE, 1984b : TOPEX : Observing the oceans from space, EOS Trans. Am. Geophys. Union, 65, pp. 433-437.
Y. BOCK, S.A. GOUREVITCH, C.C. COUNSELMAN III, R.W. KING, and R.I. ABBOT, 1986 : Interferometric analysis of GPS phase observations, Manuscripra geodaatica, 11, pp. 282--288.
C.C. CHAO, 1973 : A new method to predict wet zenith range corrections from surface measure- ments, JPL Technical Report, 32- 1256, pp. 33-41.
C.C. CHAO, 1974 : The troposphere calibration model for Mariner Mars 1971. JPL Technical Report, 32= 1587, pp. 61--76.
E.S. CLAFLIN, S.C. WU, and G.M. RESCH, 1978 : Microwave radiometer measurement of water vapor path delay : Data reduction techniques. DSN Prog. Rep. 42-48, pp. 22--30, Jet Propul- sion Laboratory, Pasadena, CA.
C.C. COUNSELMAN III, and R.I. ABBOT, 1989 : Method of resolving radio phase ambiguity in satellite orbit determination. Journ. Geophys. Res., 94, pp. 7058--7064.
R.B. CROW, F.R. BLETZACKER, R.J. NAJARIAN, G.H. PURCELL, Jr., J.I. STATMAN, and J.B. THOMAS, 1984 : SERIES-X final engineering report. JPL Internal Document D-1476, Jet Propulsion Laboratory, Pasadena, CA, August.
J.M. DAVIDSON, C.L. THORNTON, S.A. STEPHENS, G. BLEWITT, S.M. LICHTEN, O.J. SOVERS, P.M. KROGER, L.L. SKRUMEDA, J.S. BORDER, R.E. NEILAN, C.J. VEGOS, B.G. WlLLIAMS, 3.T. FREYMUELLER, and T.H. DIXON, 1987 : The March 1985 High Precision Baseline Test of
the JPL GPS-based geodetic system : A Final Report. JPL Publication 67-35. Jet Propulsion Laboratory, Pasadena, CA.
156
STOCHASTIC ESTIMATION OF TROPOSPHERIC PATH DELAYS .....
J.L. DAVIS, T.A. HERRING, I.I. SHAPIRO, A.E.E. ROGERS, and G. ELGERED, 1985 : Geodesy by radio interferometry �9 Effects of atmospheric modeling errors on estimated baseline length. Radio Science, 20, pp. 1593--1607.
T.H. DIXON, D.M. TRALLI , J.M. DAVIDSON, and J.P. DAUPHIN, 1990a : Geodetic baselines across the Gulf of California (Mar de Cortes) using the Global Positioning System. AAPG Memoir on the Gulf and Peninsular Province of the Californias, in press.
T.H. DIXON, G.M. GONZALEZ, E. KATSIGRIS, and S.M. LICHTEN, 1990b : First epoch geodetic measurements with the Global Positioning System (GPS) across the northern Caribbean plate boundary. Journ. Geophys. Res., in press.
T.H. DIXON, and S. KORNREICH WOLF, 1990 : Some tests of wet tropospheric calibration for the CASA UNO Global Positioning System experiment. Geophys. Res. Lett., 17, pp. 203--206.
A.H. DODSON, 1986 " Refraction and propagation delays in space geodesy. Int. J. Remote Sensing, 7, pp. 515--524.
D. DONG, and Y. BOCK, 1989 : GPS network analysis with phase ambiguity resolution applied to crustal deformation studies in California. Jo Geophys. Res., 94, pp. 3949-3966.
A.F. DRAVSKIKH, and M.A. FINKELSTEIN, 1979 : Tropospheric limitations in phase and frequency coordinate measurements in astronomy. Astrophys. Space Sci., 60, pp. 261-265.
G. ELGERED, J.L. DAVIS, T.A. HERRING, and I.I. SHAPIRO, 1990 : Geodesy by radio inter- ferometry :Water vapor radiometry for estimation of the wet delay. J. Geophyr Re$., in press.
G. ELGERED, B. RONNAND, E. WINBERG, and J. ASKNE, 1985 : Satellite-Earth range measure- ments. 1. Correction of the excess path length due to atmospheric water-vapor by ground- based microwave radiometry. Res. Respt. 147, Research Laboratory of Electronics and Onsala Space Observatory, Chalmers University of Technology, Gothenburg, Sweden.
F.E. FOWLE, 1912 : The spectroscopic determination of aqueous vapor. Astrophys. J., 35, pp. 149- 162.
B.L. GARY, S.J. KEIHM, and M.A. JANSSEN, 1985 : Optimum strategies and performance for the remote sensing of path-delay using ground-based microwave radiometers. IEEE Trans. Geosci. Remote Sen&, GE-23, 4, pp. 479-484.
W.B. GRANT, J.S. MARGOLIS, A.M. BROTHERS, and D.M. TRATT, 1987 : CO 2 DIAL lidar measurements of water vapor. Applied Optics, 26.
F.O. GUIRAUD, J. HOWARD, and D.C. HOGG, 1979 : A dual-channel microwave radiometer for measurement of precipitable water vapor and liquid. IEEE Trans. Geosci. Electron., GEl7, pp. 129-136.
T.A. HERRING, 1986 : Precision of Vertical Position Estimates From Very Long Baseline Inter- ferometry. Journ. Geophys. Re$., 91, pp. 9177-9182.
T.A. HERRING, J.L. DAVIS, and IA. SHAPIRO, 1990 : Geodesy by radio interferometry :The application of Kalman filtering to the analysis of VLBI data. J. Geophys. Res., in press.
D.J. HENSON, E.A. COLLIER, and K,R. SCHNEIDER, 1985 : Geodetic applications of the Texas Instruments T I -4100 GPS navigator. Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System. ed. C. Goad, NOAA, Rockville, MD, pp. 191-200.
D.C. HOGG, F.O. GUIRAUD, and W.B. SWEEZY, 1981 : The short term temporal spectrum of precipitable water vapor. Science, 213, pp. 1112-1113.
H.S. HOPFIELD, 1971 : Tropospheric range error at the zenith. Johns Hopkins University, Applied Physics Laboratory Report, June.
W.J. HUMPHREYS, 1940 : Physics of the Air. 3rd ed., McGraw-Hill, New York.
M.A. JANSSEN, 1985 : A new instrument for the determination of radio path delay due to atmos- pheric water vapor. IEEE Trans. Geosci. Remote Sens., GE-23, 4, pp. 485-490.
R.E. KALMAN, 1960 : A new approach to linear filtering and prediction problems. ASME Trans.; 32D, pp. 35--50.
157
D.M. TRALLI , S.M. LICHTEN
J.N. KELLOGG, T.H. DIXON, and R.E. NEILAN, 1989 : Central and South America GPS geodesy - CASA, EOS, Trans. Am. Geophys. Union, 70, pp. 649-656.
A.A. KHATIB, and W.B. GRANT, 1988 : Remote sensing of tropospheric water vapor for index- of-refraction determination. JPL Tech. Memorandum, D--5898, Jet Propulsion Laboratory, Pasadena, CA, 91109.
P.M. KROGER, J.M. DAVIDSON, and E.C. GARDNER, 1986 : Mobile very long baseline inter- ferometry and global positioning system measurement of vertical crustal motion. J. Geophys. Res., 91, pp. 9169--9176.
R. LANDAU, 1982 : A portable water-vapor monitor for day or night use. Pubs. Astr. Soc. Pacific, 94, pp. 600--604.
G.E. LANYI, 1984 : Tropospheric delay effects in radio interferometry. Telecommunications and Data Acquisition Prog. Rept. 42-78, pp. 153--159, Jet Propulsion Laboratory, Pasadena, California, April-June.
S.M. LICHTEN, and W.I. BERTIGER, 1989 : Demonstration of sub-meter GPS orbit determination
and 1.5 parts in 108 three-dimensional baseline accuracy. Bull. Gdoddsique, 63, pp. 167--189.
S.M. LICHTEN, W.I. BERTIGER, and U.J. LINOQWtSTER, 1989 : The effect of fiducial network strategy on high-accuracy GPS orbit and baseline determination. Proc. of Fifth International Geodetic Symposium on Satellite Positioning, Las Cruces, New Mexico, March 13-17.
S.M. LICHTEN, and J.S. BORDER, 1987 : Strategies for high precision Global Positioning System orbit determination. J. Geophys. Res., 92, pp. 12751--12762.
J.W. MARINI, 1972 : Correction of satellite tracking data for an arbitrary tropospheric profile. Radio Sci;, 7, pp. 223-231.
S.H. MELFI, and D. WHITEMAN, 1985 : Observation of lower-atmospheric moisture structure and its evolution using a Raman lidar. Bull Am. Meteor. Soc., 68, pp. 1288--1292.
F.M. MONALDO, 1989 : The effects of atmospheric water vapor on the location of ocean features by the GEOSAT altimeter. Johns Hopkins APL Technical Digest, 10, pp. 386-391.
E.E. REBER, and J.R. SWOPE, 1972 : On the correlation of the total precipitable water in a vertical column and absolute humidity. J. App/. Meteorology, 11, pp. 1322-1325.
C.H. REITAN, 1963 : Surface dew point and water vapor aloft. J. Appl. Meteoro/., 2, pp. 776--779.
G.M. RESCH, M.C. CHAVEZ, N.I. YAMANE, 1982 : Description and overview of an instrument designed to measure line-of-sight delay due to water vapor. TDA Prog. Rep~ 42-72, pp. 1-- 19, Jet Propulsion Laboratory, CA.
G.M. RESCH, 1983 : Inversion algorithms for water vapor radiometers operating at 20.7 and 31.4 GHz. TDA Progress Report 42-76, Jet Propulsion Laboratory, Pasadena, CA, p. 91109.
G.M. RESCH, M.C. CHAVEZ, N.I. YAMANE, K.M. BARBIER, and R.C. CHANDLEE, 1985 : Water vapor radiometry research and development phase final report. Publication 85-14, Jet Propul- sion Laboratory, Pasadena, CA, April 1.
S.E. ROBINSON, 1988 : The profile algorithm for microwave delay estimation from water vapor radiometer data. Radio Science, 23, pp. 401--408.
J. SAASTAMOINEN, 1972 : Atmospheric correction for the troposphere and stratosphere in radio ranging of satellites, in The use of Artificial Satellites for Geodesy, Geophys. Monogr., 15, AGU, Washington, D.C.
E.K. SMITH Jr., and S. WEINTRAUB, 1953 : The constants in the equation for atmospheric refractive index at radio frequencies. Proc., IRE, 41, pp. 1035--1057.
W,L. SMITH, 1966 : Notes on the relationship between total precipitable water and surface dew point. J. App/. Meteorol., 5, pp. 726--727.
O.J. SOVERS, and J.S. BORDER, 1987 : Observation model and parameter partials for the JPL geodetic GPS modeling software "GPSOMC", JPL Publ. 87-21.
J.J. SPILKER, 1978 : GPS signal structure and performance characteristics. Journ. Inst. Navigation, 25, pp. 121-146.
158
STOCHASTIC ESTIMATION OF TROPOSPHERIC PATH DELAYS .....
B.D. TAPLEY, J.B. LUNDBERG, and G.H. BORN, 1982 : The SEASAT altimeter wet tropospheric range correction. J. Geophys. Res., 87, pp. 3213-3220.
M.C. THOMPSON, L.E. WOOD, H.B. JANES, and D, SMITH, 1975 : Phase and amplitude scintillations in the 10 to 40 GHz band. IEEE, Trans. Antennas Propag., AP--23, pp. 792--797.
C.L. THORNTON, and G.J. BIERMAN, 1980 : uDUTcovariance factorization for Kalman filtering, in Control and Dynamic Systems, Advances in Theory and Application. Ed. C.T. Leondes, Academic Press, 16, pp. 177-248.
C. TOMASI, 1977 : Precipitabla water vapor in atmospheres characterized by temperature inversions. J. AppI. Meteorol., 16, pp. 237-243.
C.R. TOMASI, R. GUZZl, and O. VITTORE, 1974 : A search for the e-effect in the atmospheric Water vapor continuum. J. Atrnos. Sci., 31, pp. 255-260.
D.M. TRALLI , and T.H. DIXON, 1988 : A few parts in 10 8 geodetic baseline repeatability in the Gulf of California using the Global Positioning System. Geophys. Res. Lett., 15, pp. 353-356.
D.M. TRALLI , T.H. DIXON, and S.A. STEPHENS, 1988 : The effect of wet tropospheric path delays on estimation of geodetic baselines in the Gulf of California using the Global Positioning System. J. Geophys. Res., 93, pp. 6545--6557.
D.M, TRALLI , S.M. LICHTEN, and T.A. HERRING, 1990 : Comparison of Kalman filter estimates of tropospheric path delays using the Global Positioning System and very long baseline inter- ferometry (submitted to Radio Sci. ).
R.N. TREUHAFT, and G.E. LANYI, 1987 : The effects of the dynamic wet troposphere on radio interferometric measurements. Radio Sci., 22, pp. 251-265.
S.J. WALTER, and P.L. BENDER, 1987 : Status of the slant path atmospheric refraction calibrator (SPARC), EOS, Trans. Am. Geophys. Union, 68, p. 1239.
J.W. WATERS, 1976 : Absorption and emission by atmospheric gases. In Methods of Experimenta/ Physics: Astrophysics, 12, part B, editted by M.L. Meeks, pp. 142--175, Academic Press, New york.
E.R. WESTWATER, 1967 : An analysis of the correction of range errors due to atmospheric refraction by microwave radiometric techniques. ESSA Tech. Rept. IER 30-1TSA30. Available from National Tech. Info. Service, Springfield, VA.
E.R. WESTWATER, 1978 : The accuracy of water vapor and cloud liquid determinations by dual- frequency ground based microwave radiometry. Radio Science, 13, pp. 677--685.
S.C. WU, W.I. BERTIGER. J.S. BORDER, S.M. LICHTEN, R.F. SUNSERI, B.G. WILLIAMS, P.J. WOLFF, and J.T. WU, 1986 : OASIS Mathematical Description. Jet Propulsion Laboratory,
Pasadena, CA.
W.S. YANG, S.J. FRANKE, and G.W. SWENSON Jr., 1981 : A system for measuring the "wet" component of atmospheric refraction on a trans-atmospheric radio link. Interim report, NASA Grant # NSGS049, University of Illinois, Urbana, July.
R e c e i v e d : 0 1 . 0 8 . 1 9 8 9
A c c e p t e d : 2 3 . 0 3 . ] 9 9 0
159