single and parallel machine capacitated lotsizing and scheduling: new iterative mip-based...
TRANSCRIPT

Single and Parallel Machine Capacitated Lotsizing and Scheduling: NewIterative MIP-based Neighborhood Search Heuristics
Ross J.W. James∗,a,1, Bernardo Almada-Lobob
aDepartment of Management, University of Canterbury, Private Bag 4800, Christchurch, 8140, New ZealandbFaculdade de Engenharia da Universidade do Porto, Porto, Portugal
Abstract
We propose a general-purpose heuristic approach combining metaheuristics and Mixed Integer Program-
ming to find high quality solutions to the challenging single- and parallel-machine capacitated lotsizing and
scheduling problem with sequence-dependent setup times and costs. Commercial solvers fail to solve even
medium-sized instances of this NP-hard problem, therefore heuristics are required to find competitive solu-
tions. We develop construction, improvement and search heuristics all based on MIP formulations. We then
compare the performance of these heuristics with those of two metaheuristics and other MIP-based heuris-
tics that have been proposed in the literature, and to a state-of-the-art commercial solver. A comprehensive
set of computational experiments shows the effectiveness and efficiency of the main approach, a stochastic
MIP-based local search heuristic, in solving medium to large size problems. Our solution procedures are
quite flexible and may easily be adapted to cope with model extensions or to address different optimization
problems that arise in practice.
Key words: CLSD-PM, sequence-dependent setup, Mixed Integer Programming, relax-and-fix, local
search, metaheuristic, parallel-machine
1. Introduction
The aim of this paper is to develop a range of mathematical programming-based heuristics to solve
complex lotsizing and scheduling problems. The techniques developed here are employed to solve a specific
problem, but could be easily generalized to other variants of lotsizing and scheduling problems and even
other problems outside this domain.
Our motivation is to solve the single-machine capacitated lotsizing and scheduling problem with sequence-
dependent setup times and costs, and to generalize this to the parallel-machine case that arises in many
industrial applications. This single-stage problem is an extension of the pure capacitated lotsizing problem
(CLSP – Bitran and Yanasse [7]) and of the CLSD proposed by Haase [13], which only addresses one
∗Corresponding authorEmail addresses: [email protected] (Ross J.W. James), [email protected] (Bernardo Almada-Lobo)
1Tel: +64 3 364 2987 Ext 7015, Fax: +64 3 364 2020
Preprint submitted to Elsevier February 6, 2011

machine and no setup times, as we consider an allocation dimension with multiple parallel machines and a
sequencing dimension with sequence-dependent setups. In their review of capacitated lot-sizing extensions,
Quadt and Kuhn [19] denote this problem as CLSD for single-machine and CLSD-PM for parallel-machines.
CLSD is considered to be a big-bucket problem, as several products/setups may be produced/performed per
period. The practical relevance of parallel machine lotsizing and extensions is supported by examples of its
application in various industries such as pharmaceutical, chemical, electronics, food, tile manufacturing, tire
industry, injection molding, the alloy foundry industry and multi-layer-ceramics (Jans [15] and Quadt and
Kuhn [19]). Naturally, the extension to parallel machines enlarges the planning problem, making it much
harder to solve as the product-to-machine assignment has to be tackled. Despite its applicability, the amount
of research on these problems and correlated variants is small, mainly due to its inherent complexity (Clark
et al. [9]). The same conclusion is drawn by Zhu and Wilhelm [22], who state that, despite the significant role
of combined lotsizing and scheduling in the effective utilization of limited resources in different production
systems, most research has focused on the single-machine configuration. Research on other configurations is
sparse.
We consider N products to be manufactured on M different capacitated machines over a discrete planning
horizon of T periods. Due to the sequence-dependency of setups in a product changeover, lot sizing and
sequencing are simultaneously tackled. The objective is to find a strategy that satisfies demands without
backlogging and minimizes both setup and holding costs. The computational complexity of the resulting
mixed integer programming (MIP) model (the underlying problem is NP-hard) makes the use of efficient
heuristic strategies mandatory for solving large real-world instances. State-of-the-art optimization engines
either fail to generate feasible solutions to this problem or take a prohibitively large amount of computation
time, even in the single-machine setting (see Almada-Lobo and James [2]).
A variety of algorithms have been developed to tackle this area. Buschkhl et al. [8] classifies solution
approaches to dynamic capacitated big-bucket lotsizing problems into five major categories. The spectrum
ranges from mathematical programming heuristics, lagrangean heuristics and decomposition and aggregation
heuristics, to metaheuristics and greedy heuristics. Most of the research to date considers either approximate
approaches or optimization models, however research into combining heuristics and optimization has recently
started to emerge (Framinan and Pastor [12]). Almada-Lobo and James [2] solved the single-machine CLSD
(CLSD-SM) by integrating a big-bucket lotsizing and scheduling model and a batching scheduling model
(converting lots into jobs) and developed two neighborhood-based search algorithms, based on Tabu Search
(TS) and Variable Neighborhood Search (VNS).
It is acknowledged by the community that the time to solve lotsizing and scheduling problems is heavily
dependent upon the instances being solved. Nevertheless, there is a need for more realistic random instances
for these problems based on real-world cases, especially for the multi-machine setting (Clark et al. [9]). In
this paper, we propose a problem generator with new features that allows us to conduct computational
2

experiments on a set of diverse data. To the best of our knowledge, previous literature has dealt with
capacity of a time period being proportional to the demand of the time period. We investigate removing
this assumption. In addition we introduce two parameters, machine balancing and machine loading, that
control the product-machine assignment matrix.
Here we focus our attention on new mathematical programming-based heuristics and metaheuristics that
are flexible and could easily be adapted to cope with model extensions or to address different optimization
problems that arise in practice, as they are problem- and constraint-independent. Naturally, we only explore
parts of the solution space, and therefore we are not able to prove optimality.
The so-called progressive interval heuristics (such as the relax-and-fix heuristic and internally rolling
schedule heuristics) solve the overall MIP problem as a sequence of partially relaxed MIPs (thus reducing
the number of binary variables to be treated simultaneously), always starting from the first period on a
forward shifting move (Federgruen et al. [10]). The setup variables are progressively fixed at their optimal
values obtained in earlier iterations. Different variants of this class of solution approach allow a trade-off
between optimality and run-time. Beraldi et al. [6] and Ferreira et al. [11] recently applied relax-and-fix
variants successfully to different lotsizing and scheduling problems. These are all construction-heuristics
that provide initial solutions. Pochet and Wolsey [17] describe an improvement heuristic similar to the
relax-and-fix heuristic, which they called ‘exchange’. The decomposition scheme for the integer variables
is the same as before, but it differs from the relax-and-fix heuristic in that it does not relax the binary
setup variables in the subproblems. At each step the integer variables are fixed at their best value found
in the previous iterations, except for a limited set of integer variables that are related to the subproblem
at hand and are restricted to take integer values. The next iteration deals with a new subproblem with a
different subset of integer variables to be optimized. Note that when the last partition is solved, and in case a
better solution is found, this exchange procedure can be repeated (i.e., each subproblem may be solved more
than once) until a local optimum is reached. Naturally, this procedure needs to be given a feasible starting
solution. The same approach is used in Sahling et al. [20] and Helber and Sahling [14] for the multi-level
CLSP, where the authors called it the fix-and-optimize heuristic.
All the aforementioned MIP-based approaches are deterministic, which may lead to a poor local optimum
for hard instances of a problem. We develop a stochastic MIP-based local search improvement heuristic that
tries to improve any given feasible solution. The key idea is to solve a series of subMIPs randomly selected
in an iterative exchange algorithm. The probability of selecting each subMIP is based on two factors: the
frequency and the recency of the subMIP being selected. To move the search out of a local minimum,
we borrow well-known diversification mechanisms from local search metaheuristics, and we use different
neighborhoods based on the original MIP. This novel procedure combines features of exact enumeration
methods (branch-and-bound) with approximate procedures (local search). According to Puchinger and Raidl
[18], our approach fits into the category of an integrative combination of exact algorithms and metaheuristics,
3

as the former is incorporated in the latter. Though this heuristic cannot guarantee the solution’s optimality,
however we hope to obtain quasi-optimal solutions in a reasonable amount of CPU time. To produce a feasible
solution from scratch, we rely on a construction heuristic based on the general relax-and-fix framework. Our
results will be compared with those obtained with the exchange heuristic of Pochet and Wolsey [17] or the
fix-and-optimize heuristic of Sahling et al. [20], the VNS and TS metaheuristics of Almada-Lobo and James
[2] and, finally, the CPLEX commercial solver.
The remainder of the paper is organized as follows: Section 2 introduces the formulation for the parallel
machine capacitated lotsizing and scheduling (CLSD-PM). Section 3 is devoted to the Iterative MIP-based
Neighborhood Search Heuristic, presenting its general decomposition idea and main ingredients. Section 4
provides computational evidence that demonstrates the superiority of this approach and finally, Section 5
draws some conclusions from this work and suggests directions for future research.
2. CLSD-PM Model Formulation
In this paper we study the parallel machine capacitated lotsizing and scheduling problem with sequence
dependent setups (CLSD-PM) of which the single machine problem (CLSD-SM) is a special case. We consider
a planning interval with t = 1, . . . , T periods and i, j = 1, . . . , N products processed on m = 1, . . . ,M
machines. We use the notation [K] to refer to the set {1, 2, . . . , K}. As usual, dit denotes the demand of
product i in period t, smij and cmij the time and cost incurred when a setup occurs from product i to
product j on machine m respectively, hi the cost of carrying one unit of inventory of product i from one
period to the next, pmi the processing time of one unit of product i on machine m and Cmt the capacity of
machine m available in period t. In addition, Gmit is an upper bound on the production quantity of product
i in period t to machine m. Ami indicates which machines are able to produce which products. Ami is set
to one if machine m is able to produce product i, or zero otherwise.
The following decision variables are used: Xmit refers to the quantity of product i produced in period t
on machine m, Iit the inventory level of product i at the end of period t and Vmit an auxiliary variable that
assigns product i on machine m in period t. The larger Vmit is, the later the product i is scheduled in period
t on machine m, assuring that each machine is only set up for one product at any given time.
In addition, the following 0/1 decision variables are defined: Tmijt equals one if a setup occurs from
product i to product j on machine m in period t, and Ymit equals one if the machine m is set up for product
i at the beginning of period t. The CLSD-PM model below is a generalization of the CLSD-SM introduced
in Almada-Lobo et al. [3]:
4

min∑m
∑
i
∑
j
∑t
cmij · Tmijt+∑
i
∑t
hi · Iit (1)
Ii(t−1) +∑m
Xmit − dit =Iit i ∈ [N ], t ∈ [T ] (2)
Ii0 =0 i ∈ [N ] (3)∑
i
pmi ·Xmit +∑
i
∑
j
smij · Tmijt ≤Cmt m ∈ [M ], t ∈ [T ] (4)
Xmit ≤Gmit · (∑
j
Tmjit + Ymit)m ∈ [M ], i ∈ [N ],
t ∈ [T ](5)
Ymi(t+1) +∑
j
Tmijt =Ymit +∑
j
Tmjit m ∈ [M ], i ∈ [N ], t ∈ [T ] (6)
∑
i
Ymit =1 m ∈ [M ], t ∈ [T ] (7)
Vmit + N · Tmijt − (N − 1)−N · Ymjt ≤Vmjt
m ∈ [M ], i ∈ [N ],
j ∈ [N ] \ {i}, t ∈ [T ](8)
∑t
Xmit ≤GmitAmi m ∈ [M ], i ∈ [N ] (9)
(Xmit, Iit) ≥ 0, (Tmijt, Ymit) ∈{0, 1}, Xmit ∈ Z, Vmit ∈ R (10)
Objective function (1) minimizes the sum of setup and inventory holding costs. Constraints (2) balance
production and inventories with demand. Constraints (3) set the initial inventory levels. Constraints (4)
ensure that production and setups do not exceed the available capacity. The setup forcing constraints are
provided by (5). Constraints (6) keep track of the setup carryover information, whilst constraints (7) ensure
that each machine is set up for one product at the beginning of each time period. Note that requirements
(6) link two consecutive periods. Disconnected subtours are eliminated by constraints (8). These constraints
apply whenever one subtour occurs in a period, forcing the respective machine to be set up at the beginning
of that period to one of the products that are part of the subtour. Constraints (9) ensure production of
a product can only occur on machines that are able to produce that product. Finally, there are the non-
negativity and integrality constraints (10). Note that setup carryovers are guaranteed here, since if a product
is the last one to be produced in a period and the first one to be produced in the following period on the
same machine, no setup is required in the latter period.
The intractability of this large-scale discrete optimization problem is well known (see Computational
Experiments section), which makes the usage of standard mathematical programming approaches prohibitive
due to unacceptable solution times. This fact motivates us to develop approximate methods to deliver
superior solutions. In order to be problem and constraint independent, our approach combines features of
metaheuristic and mathematical programming methods.
5

3. Iterative MIP-Based Neighborhood Search
3.1. Basic Idea of the Decomposition Scheme
The number of integer variables in the CLSD-PM model (N2 ·M ·T +2 ·N ·T ·M) determines most of the
computational burden. The techniques we use to solve the CLSD-PM problem are based on decomposing
the original problem into subsets that can be solved more easily by a MIP in an iterative fashion. As the
number of integer variables in each subproblem is significantly smaller than that of the original problem,
the solution times to solve each one to optimality is very small. In order to do this we assume we already
have a partial or feasible solution, whose decision variables T , X, and Y have the values T ′, X ′ and Y ′,
respectively, obtained in previous iterations. In each iteration the set of decision variables to be released
and the set of those to be frozen (fixed) need to be given. We need to formulate a subMIP that will solve
specific combinations of periods, products and machines, while also bringing into the solution elements of
the problem that have been determined at earlier stages. Let βt denote a parameter that is set to 1 if the
period t is to be optimized (i.e. binary variables related to period t are released), ψi = 1 to represent the
products to be optimized and δm = 1 to represent machines that are to be optimized. The periods, products
and machines that are to remain the same as our incumbent solution have βt = 0, ψi = 0 and δm = 0,
respectively. We refer to this as the subMIP (T ′, X ′, Y ′, βt, ψi, δm) model which is formulated as follows:
min∑m
∑
i
∑
j
∑t
cmij · Tmijt +∑
i
∑t
hi · Iit
(2)− (9)
Tmijt(1− βtψiψjδm) =T ′mijt(1− βtψiψjδm)m ∈ [M ], i ∈ [N ],
j ∈ [N ], t ∈ [T ](11)
Xmit(1− βtψiδm) =X ′mit(1− βtψiδm)
m ∈ [M ], i ∈ [N ],
t ∈ [T ](12)
Ymit(1− βt−1ψiδm) =Y ′mit(1− βt−1ψiδm)
m ∈ [M ], i ∈ [N ],
t ∈ [T ](13)
(Xmit, Iit) ≥ 0, (Tmijt, Ymit) ∈ {0, 1}, Xmit ∈ Z, Vmit ∈ R
Constraints (11)-(13) define the binary and integer decision variables for periods that have been solved
previously. The introduction of parameter βt−1 instead of βt in (13) is due to the fact that the last setup of
period t− 1 is defined in the previous iteration of the algorithm and is carried over into period t.
6

3.2. MIP-Based Construction Heuristic
In order to create an initial solution to the CLSD-PM problem instance we use a procedure based on the
well known relax-and-fix framework (Pochet and Wolsey [17]).
The relax-and-fix (RF) framework decomposes a large-scale MIP into a number of smaller partially
relaxed MIP subproblems, which are solved in sequence. Naturally, the way the original MIP is partitioned
defines the solution quality of the RF heuristic and the computational burden. Each subproblem should
entail a small enough number of integer variables to be quickly and optimally solved using exact methods.
Due to the structure of the original MIP, we rely on a time-stage partition, which is a rolling horizon
approach. The planning horizon is typically partitioned into non-overlapping intervals (e.g., Stadtler [21],
Araujo et al. [4] and Ferreira et al. [11]). A shift forward strategy solves a sequence of sub-MIPs (one per
time interval), each dealing with a subset of the integer variable set of the overall problem. The other
subsets are either relaxed or removed (i.e., periods beyond the end of the current interval are not included)
depending on the simplification strategy. As this heuristic progresses, the integer variables (and, depending
on the freezing strategy, also the continuous variables) are permanently fixed to their current values. The
schedule is completed at the last iteration.
The RF heuristic can be parameterized in many ways. Our design is based on the results published by
Merce and Fontan [16] and Absi and Kedad-Sidhoum [1]. Let γ be the number of periods whose decisions
variables were determined in the previous iterations but are to be re-solved, and w be the number of periods
to be solved at each iteration, i.e. the time intervals overlap by γ periods between iterations. It is implied here
that both parameters are constant throughout the algorithm. Note that γ allows us to smooth the heuristic
solution by creating some overlap between successive planning intervals. Let tik and tfk denote the initial
and final periods of the interval at step k. The RF pseudo code is described in Figure 1. The relaxSubMIP
denotes the relaxed version of subMIP (T ′, X ′, Y ′, βt, ψi, δm) subproblem to be solved at iteration k of the
heuristic, where the sub-set of variables T and Y up to period tik−1 are fixed, the sub-set from period tik up
to tfk are restricted to be integer, and each other period’s integer variables are relaxed to being real numbers.
This is essentially the subMIP model outlined in Section 3.1, except that equation (12) is removed and
(Tmijt, Ymit) ∈ {0, 1}∀t ≤ tfk ,∈ R otherwise (i.e. the integrality constraints are relaxed). According to the
definition of RF, βt is set to one for every t greater than or equal to tik, and ψi and δm are set to one for
every product and machine, respectively.
Note that w − γ defines the length of the anticipation horizon at each iteration and, consequently,
the number of iterations of the heuristic. Recall that our formulation keeps track of the setup carryover
information, knowing the product that the machine is ready to process at the beginning of each time period.
The motivation for using w > 1 and γ > 0 (with γ < w) comes from the setup carryover information. With
a γ = 0, blocks do not overlap and therefore the product the machine is set up for at the beginning of the
block is fixed at the previous iteration. This therefore affects the production sequence of the current block
7

Relax-and-Fix-Construction(w, γ)k ← 1, i ← 1tik ← 1, tfk ← wψj ← 1 ∀j ∈ [N ], δm ← 1 ∀m ∈ [M ]while tfk < T do
βj ← 1 ∀j ≥ tik, 0 otherwise.Solve relaxSubMIPT ′ = T , Y ′= Y
k ← k + 1, tik ← tfk−1 − γ, tfk ← tfk−1 + w − γ
if tfk > T thentfk ← T
end ifend whileβj ← 1 ∀j ∈ [tik...tfk ], 0 otherwise.Solve relaxSubMIP
end
Figure 1: Relax-and-fix Pseudo Code
to be optimized.
3.3. MIP-Based Improvement Heuristic
The aim of this section is to develop a MIP-Based improvement heuristic that will not get stuck in local
optima. This requires two distinct elements, the first is a neighborhood scheme that can generate solutions
from a current incumbent solution, while the second is a process for moving from one neighbor to another
while not getting stuck in local minima, which we call the improvement algorithm.
3.3.1. Neighborhood Scheme
The proposed neighborhood scheme selects a subset of periods and a subset of products and reoptimizes
all the variables related to these products and periods across all machines, fixing the setup decisions T and
Y of other periods or products, but allowing the X and I of the products concerned to be redetermined
over the complete planning horizon. The MIP used to find the best neighboring solution is the same as the
subMIP proposed in section 3.1 except that (12) is replaced by:
Xmit(1− ψi) =X ′mit(1− ψi) m ∈ [M ], i ∈ [N ], t ∈ [T ]
Initial experimentation fixed X in these periods as well, but reoptimizing X for all periods was consistently
superior in terms of solution quality, while the extra CPU time required was not significant. Note that we do
not relax the integrality restriction for any integer variable as was done with the relax-and-fix construction
heuristic.
8

3.3.2. Improvement Algorithm
The proposed improvement heuristic has two phases: a local search phase and a neighborhood modifica-
tion phase.
The local search phase is based on solving the neighborhood with all products (i.e. ψi = 1∀i ∈ [N ]),
all machines and a selected number of contiguous periods. Initially, the probability of selecting a particular
period is the same. However, as periods are selected, the probability of that period being selected again is
reduced. Two factors are used to determine the probability of selection of a period: the frequency and the
recency. The more frequently a period has been used in a neighborhood (given by the number of runs the
respective period was selected), and the more recently it has been used (given by the number of iterations
passed since the last selection of that period), the lower the probability of selection, which is proportional to
a weighted average of these two factors. The search also keeps track of which period combinations have been
solved without any improvement in the solution quality. A period will not be selected if it has already been
used and the current objective value was obtained (providing a form of short-term memory which speeds up
the solution procedure). If all period combinations have been tried and there has been no improvement in
the solution, then a local minimum has been found and this phase of the improvement algorithm ends. Of
course the algorithm will also terminate if the maximum CPU time is exceeded. We refer to the heuristic
which just uses this phase of the improvement algorithm the Product Quantity(X) Period (P) heuristic (H)
or XPH.
The second phase, the neighborhood modification phase, is similar to Variable Neighborhood Search
(VNS) in that it uses a different neighborhood to move the search out of a local minimum. Unlike the
shaking step of VNS, however, the move from the second neighborhood will always be an improvement from
the incumbent solution due to using a MIP optimizer to generate the best neighbor. In a similar manner
to VNS, once a new solution is found the search reverts to the original neighborhood and proceeds to find
another local minimum using the original neighborhood scheme, in our case the XPH local search.
The local minima are created because the sequences and the product quantities of all products are only
optimized over a given small number of periods. Therefore, in order to break this source of local minima, we
need to consider the sequencing of a product over a greater number of periods. The alternative neighborhood
scheme limits the number of products while considering a larger number of periods than that of XPH, the
size of which is determined by the user. In this phase we try to find a better solution by randomly selecting
different combinations of products and periods. The selection is biased to those periods and products that
have not been chosen as often. Once a better solution is found, the search switches back to the XPH
neighborhood and completes another local search from that point. If a better solution is not found within a
predefined number of iterations (determined by a parameter), then the search is terminated. We also limit
the time an iteration can take in order to ensure that, if a difficult combination of periods and products
is selected, not all the available search time is consumed by evaluating one move. The user must therefore
9
specify the number of products and periods to evaluate in a move, the maximum iteration time, the number
of non-improving iterations to complete before exiting and the maximum time for the search overall.
The heuristic, composed of the two phases described above, we call Iterative Neighborhood Search or
INS.
4. Computational Experiments
We perform computational experiments on an extensive set of instances that reflects different character-
istics of real-world cases found in practice. It is well known that the complexity of these problems is highly
dependent on the settings to be considered. In the next sections the results are categorized into four sets:
single and multi-machine environments, and instances with or without machine capacity variations. We aim
to investigate the impact of the overall capacity of a time period not being proportional to the net demand
of that period; such a feature is common in the process industries (such as glass container, beverages and
textiles).
4.1. Problem Instance Generation
The problem instances used in the following computational experiments are based on the approach of
Almada-Lobo et al. [3]. Elements of each problem instance are generated from a uniform distribution and
then rounded to the nearest integer, or calculated from elements that were generated this way. The ranges
used for the elements are as follows:
• Setup Times between 5 and 10 time units, and Setup Costs are proportional to the setup time by a
specified factor (Cost of Setup per unit of time, θ).
• Holding costs between 2 and 9 penalty units per period.
• Demand between 40 and 59 units per period.
• Period Capacity is proportional to the total demand in that period as defined by a parameter (Capacity
Utilization per period, Cut): Ct =∑
i dit/Cut.
• Processing time for one unit = one unit of time.
As in Almada-Lobo et al. [3], the following problem parameters were varied in order to create different
problem types:
• Number of Products, N , Number of Periods, T , Capacity Utilization per period, Cut, and Cost of
Setup per unit of time, θ
In order to control for the amount of capacity variation we also introduce another parameter CutV ar,
which works in conjunction with Cut. When capacity variation is introduced, Cut becomes the target
10
utilization for the overall problem instance as before and we ensure that the cumulative capacity utilization
for all periods never exceeds this value (otherwise the problem would not be feasible, as backlogging is not
permitted). The new parameter CutV ar represents and controls the maximum total allowed variation from
Cut, so the actual capacity utilization can vary. The variation is then randomly allocated to the periods.
To ensure that the variation is spread between the periods, a maximum of half of this total can be allocated
to any one period in the first half of the planning horizon. Note that if CutV ar equals zero, then there is
no capacity variation and the problem instances generated are the same as in Almada-Lobo et al. [3].
To allow for multi-machine problem instances, besides the parameter M for the number of machines,
we introduce two further parameters to generate the 0/1 assignment matrix data, Ami, which specifies if a
product can be produced or not on a given machine. These new parameters are the probability of an extra
machine being able to produce the same product, MProb, and the maximum percentage difference in the
number of jobs that can be processed on different machines, MBal. In the case where MProb equals one,
each machine can process every product (i.e. identical machines).
Each type of instance can therefore be characterized by the parameters M , N , T , Cut, CutV ar, θ,
MProb and MBal. Clearly if M = 1 then MProb and MBal are redundant.
The problem instances used in this research can be downloaded at
http://www.mang.canterbury.ac.nz/people/rjames/
4.2. Algorithms Tested
We rely on the following abbreviations to represent the algorithms that were used to test some or all of
the problem instances:
• XPHOC: five-step construction heuristic of Almada-Lobo et al. [3] then the XPH local search; the
construction heuristic contains several forward and backward steps that place feasibility over optimality
to find feasible solutions efficiently. The aim is to compare the effectiveness of the improvement heuristic
given different initial solutions.
• XPHRF: relax-and-fix construction heuristic then the XPH local search;
• TS : the Tabu search of Almada-Lobo and James [2];
• VNS : the Variable Neighborhood Search of Almada-Lobo and James [2];
• FOHRF9: relax-and-fix construction heuristic then a fix-and-optimize (or exchange) improvement
heuristic with a MIP solution tolerance of 10−9;
• CPLEX: branch-and-cut performed by Parallel CPLEX on the original CLSD-PM model;
• INSRF: the MIP-based Iterative Neighborhood Search heuristic starting with a relax-and-fix construc-
tion heuristic.
11
The Relax-and-Fix heuristic requires two parameters, namely the width of the interval w and the number
of overlapping periods γ. Preliminary empirical analysis pointed to the following choice of values: w = 2 and
γ = 1. For each relaxSubMIP we have set a time limit of 3600/K seconds, where K = d(T − w)/(w − γ)e+1
denotes the total number of iterations, and a relative MIP gap tolerance of 0.5%.
For the fix-and-optimize (exchange) heuristic, the best option was to consider a step (width) of two
periods. At the K = d(T − w)/we + 1-th iteration, the exchange procedure is repeated if a better solution
is found. The maximum time was set at one hour. For a detailed description of this algorithm the reader is
referred to Sahling et al. [20].
For our MIP Improvement heuristic, XPH local search, there are four parameters: the number of periods
to solve at a time, the weights for recency and frequency for the probability calculation, and the maximum
time allowed per iteration. The number of periods to solve at a time was set at two, as larger values slowed
the solving time considerably. Preliminary testing showed that the weights appeared to have little influence
on the performance of the search so we arbitrarily set these to 0.5 and 0.2 respectively for recency and
frequency.
Finally, for the INS, the alternative neighborhood used to shake the incumbent solution considers a
different number of products and periods to evaluate in a move, depending on the size of the problem.
For 25 and 15 product problems, 16 and 10 products respectively are considered. For 15, 10 and 5 period
problems 10, 10 and 5 periods respectively are considered. If not stated otherwise, the maximum iteration
time is set at 1800 seconds and the number of non-improving iterations to complete before exiting is set at
100. As with all the other searches the maximum time for the search overall is set at one hour.
4.3. Single Machine Experiments with No Capacity Variation
Twenty four different problem types were created from the combinations of the following parameters:
N ∈ {15, 25}, P ∈ {5, 10, 15}, Cut ∈ {0.6, 0.8}, θ ∈ {50, 100}. Of course M = 1 and CutV ar = 0 in all of
these instances. In each case 10 different instances were generated, creating a total of 240 instances to be
solved.
To evaluate the quality of these heuristics, we use the lower bound generation procedure described in
Almada-Lobo et al. [3], which essentially strengthens the CLSD-PM formulation with the (l, S) cuts that
are introduced with the separation algorithm of Barany et al. [5]. These computational experiments were
performed on a Pentium T7700 CPU running at 2.4 GHz with 2GB of random access memory. On this
system, Parallel CPLEX 11.1 was used as the mixed integer programming solver, while the algorithms were
coded in Visual C++ .NET 2005.
The problems solved here are a subset of the problems that were solved in Almada-Lobo and James [2]
using Tabu Search and Variable Neighborhood Search. Almada-Lobo and James [2] used similar hardware
to what we used here, and therefore we can compare the quality of the solutions between the different
techniques and the CPU times required to obtain these solutions.
12
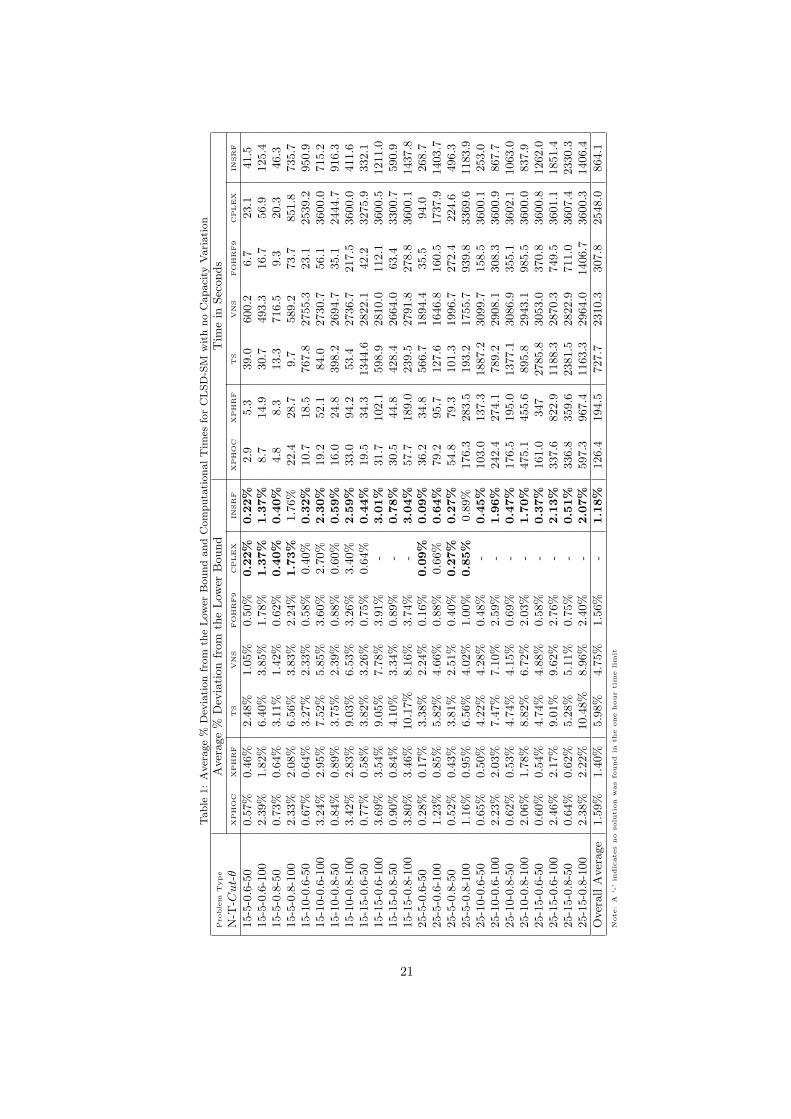
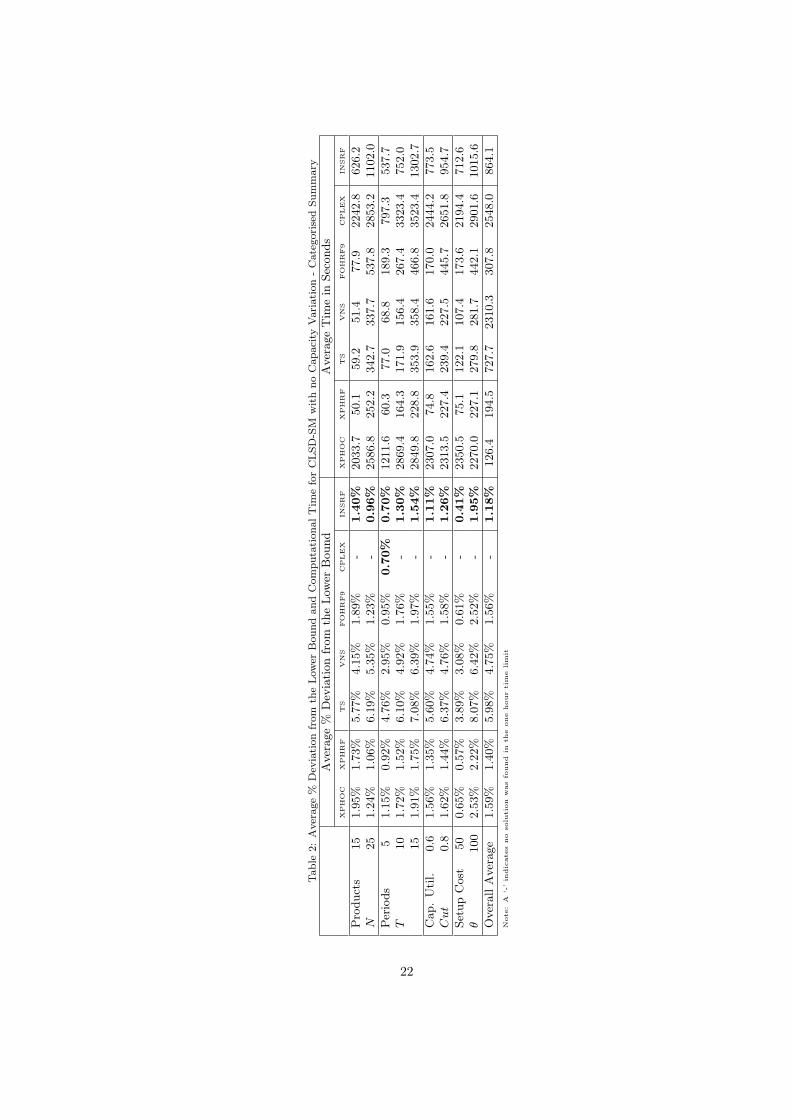
Table 1 presents the computational results of the different algorithms proposed in this paper and Table
2 summarizes these results by grouping instances by the number products (N), the number of periods (T ),
capacity utilization values (Cut), and setup cost per unit of time (θ).
The results clearly show that all linear programming (LP)-based heuristics, including Fix-and-Optimize,
outperformed the TS and VNS metaheuristics in every problem type. In all cases the LP heuristics not only
obtain higher quality solutions but also do so in less time. Overall, however, the technique that consistently
found the best solutions was the INSRF heuristic, producing the best average result for 22 of the 24 problem
types studied here. By design the INSRF will always dominate XPHRF, as the first phase of INSRF is
a local search using the XPH neighborhood scheme. Therefore the improvement made by the alternative
neighborhood scheme incorporated into INS can be measured as the difference between the results from
XPHRF and INSRF. On average we can see that the effect of this neighborhood scheme was to produce a
0.22% improvement in the average solution quality at a cost of, on average, 669.6 seconds. This improvement
to time ratio is very small - however as the MIP heuristics are producing high quality solutions in the first
place, large gains cannot be expected.
The relax-and-fix initial solution provides some performance benefits, as can be seen by comparing the
XPHOC with XPHRF, however these differences are rather small and therefore we may conclude that these
LP-based heuristics are reasonably insensitive to the starting point provided.
Table 2 generally shows that the larger the number of periods, the higher the deviation from the lower
bound. This is not surprising as these problems are larger in size and therefore it is more difficult to search
the solution space. Nevertheless, the quality of the solution seems to be independent of the number of
products and the capacity utilization factor. Table 2 also shows that there is a significant difference in the
average deviation from the lower bound, being for all LP-based heuristics between 3.2 and 4.7 times larger
when the setup cost per unit of time, θ, is 100, compared to when it is 50 - which suggests that problems
with higher setup costs are more difficult to solve.
4.4. Single Machine Experiments With Capacity Variation
To test single machine problems with capacity variation, we use the same set of problem types used in
Section 4.3, however for each instance CutV ar was set at 0.5. The instances were then solved using the best
heuristics we found in Section 4.3, namely XPHRF, INSRF and FOHRF9. For these experiments and the
remaining experiments in this paper we used an Intel Quad-Core Q9550 processor running at 2.83GHz with
3Gb RAM and CPLEX 12.1 mixed integer programming solver. The results are given in Table 3 while the
results grouped by number of products (N), number of periods (T ), capacity utilization values (Cut), and
setup cost per unit of time (θ) are provided in Table 4.
13

From these tables we notice that the introduction of capacity variation has produced results that are
very similar to the results for instances without capacity variation. The ranking of the solution techniques
is the same, with INSRF providing the best results followed by XPHRF and FOHRF9, however the change
in the deviations from the lower bound are quite different for the different techniques. When we compare
these results with the results for instances without capacity variation, the average lower bound deviation
for INSRF drops by 0.02% (a 1.9% drop), while the XPHRF increases by 0.15% (a 8.6% increase) while
the FOHRF9 increases by 0.58% (a 37.2% increase). The solution times also vary considerably with the
CPU time for INSRF increasing 1316.5 seconds (152.4% increase), XPHRF decreasing 105.7 seconds (54.3%
decrease) and FOHRF decreasing 242.3 seconds (78.7% decrease). By comparing the average deviation from
the lower bound in Tables 1 and 3 we see that some deviations increased and others decreased for each of the
techniques, and there was no specific problem type characteristic that could be used to predict this change.
Generally, however, we can see that the two local search procedures (XPHRF and FOHRF9) produced
poorer results in less time, which indicates that the local minima that they converged to was not as deep for
instances with capacity variation as compared to instances without capacity variation. The neighborhood
structure used by FOHRF9 is smaller and therefore the local minima are shallower than those local minima
found by XPHRF, which has a slightly larger neighborhood scheme. The fact that the INSRF procedure,
which is able to break out of local minima, was able to find better and better solutions (indicated by the long
running time) shows that there were a large number of local minima than needed to be navigated around.
These results suggest that the introduction of capacity variation changes the landscape of the search
space with the introduction of more local minima, therefore making the terrain rougher and therefore harder
to search. In this environment local search techniques will generally not perform as well as their performance
will be highly dependent on the starting point used. The number of local minima can be reduced by using
more general neighborhood structures and therefore those local search procedures with larger neighborhoods
will generally perform better in this type of environment. Using metaheuristics is likely to more beneficial in
this type of environment as they will be able to negotiate the increased number of local minima introduced
by the capacity variation.
4.5. Multiple Machines with No Capacity Variation
In order to generate problem instances we used, as a base, a mid-sized problem instance with 15 products,
10 periods and 80% capacity utilization. We then tried different perturbations of M , N , T , Cut, θ, MProb
and MBal. For each combination 10 instances were generated. The average results are presented in Table 5
while an analysis of the effect on parameter changes is provided in Table 6. Note that all instances have
a 3600 second time limit, however run times may be longer as any MIP started within this time limit are
14
allowed to finish. The fix-and-optimize heuristic (FOHRF9) has a 3600/K second sub-MIP time limit, while
the INSRF heuristic has a 600 second XPH sub-MIP time limit. CPLEX could not find solutions to these
problem instances within the one hour time limit, however it was used to calculate a lower bound that was
based on a plant-location reformulation of our model which is known to produce tighter bounds.
The results in Table 5 show that the best overall technique, in terms of average deviation from the lower
bound, was the XPHRF heuristic followed by the INSRF heuristic and lastly the FOHRF9. This reverses
the ranking for XPHRF and INSRF that was observed for the single machine problems. The reason for this
change in ranking is due to the 600 second time limit placed on the XPH subMIP in the INS heuristic. As we
can see by the CPU times in Table 5, the XPHRF took on average 2207.3 seconds to run to completion, well
in excess of the subMIP time limit. As a result the solutions obtained from INSRF are of a lower quality,
however the average solution times for INSRF are nearly half that of XPHRF. The time taken to solve the
XPHRF is strongly related to the number of machines in the problem instance, as can be seen in the huge
increase in CPU time taken between solving two and three machine problem instances in Table 6. This
suggests that within the XPH framework the number of machines, as well as periods and products, need to
be limited so that its performance is not unduly affected by when the number of machines increases in the
problem instance.
FOHRF9 is the fastest of all three heuristics by a large margin, however it does have the largest deviation
from the average lower bound. As with the other two techniques, adding machines to the problem does
increase the computational burden considerably. Even with its speed FOHRF9 found the lowest average
deviation from the lower bound for one of the larger problem types. This problem type was very difficult to
solve, as illustrated by XPHRF taking an average of over 7600 seconds, hence the smaller neighborhood of
FOHRF9 was able to quickly move to better solutions and converge to a local minima.
If we compare the average lower bound deviations in Tables 1 and 5 we see that the deviations for the
multi-machine problems are more than 5% higher than the deviations we obtained for the single machine
problem, which could indicate one of two things: either the problem is much more difficult to solve with the
introduction of more machines, or the lower bound procedure is not as tight for the multi-machine problem.
This trend can also be observed in Table 6 where problem instances with three machines had between 4.5%
- 6.0% more lower bound deviation than those problem instances with two machines.
Referring to Table 6, we can gain some further insights into this problem and these heuristics. Inter-
estingly increasing the number of products reduces the deviations from the lower bound, however this does
not mean the problem is easier as the time taken to solve these problems does increase considerably. If the
number of periods increases, the problem expands linearly in terms of its variables and we would expect
there to be an increase in average lower bound deviation and time, and this is what we observe in the data in
Table 6. Increasing Capacity utilization and setup costs both have a similar effect. Regarding the influence
of the assignment matrix data Ami, smaller changes are observed when we consider changing the balance
15

of jobs across the machines (given by MBal), but they become more expressive when the total number of
possible job-machine allocations is modified. Clearly, when moving MProb from 60% to 80%, the problem
becomes harder as the solution space is expanded.
4.6. Multiple Machines with Capacity Variation
For the Multiple Machines problem with Capacity Variation the same set of problem instances solved in
Section 4.5 were generated with a CutV ar = 0.5. Once again these instances were solved using the XPHRF,
INSRF and FOHRF9 heuristics. The results for these instances are detailed in Table 7, while an analysis of
the changes in problem instance parameters is presented in Table 8.
We see from Table 7 that, as we observed in the instances without capacity variation, XPHRF is the best
performing heuristic followed by INSRF and finally FOHRF9. The reason for XPHRF outperforming INSRF
is once again due to the restricted subMIP time as discussed in Section 4.5. XPHRF requires the most
CPU time and FOHRF9 the least, however here the difference in average time required between XPHRF
and INSRF is just 11% compared to 85% for instances without capacity variation. This is due primarily to
XPHRF average CPU time required dropping significantly as the INSRF times are fairly comparable.
In comparison to the Multi-Machine instances without capacity variation we note that adding capacity
variation does not affect the average lower bound deviations significantly, however in all cases the average
has actually dropped with the introduction of capacity variation unlike the single machine instances where
there was a mix of changes. If we compare the CPU times we find that introducing capacity variation has,
surprisingly, decreased them as well. A possible explanation for this is that capacity variation can narrow
down the possible alternative schedules for those periods where capacity is reduced, and in a multi-machine
setting these constraints become even tighter. It is important here to note that the results for the multi-
machine problem may be at a different level of quality to the single machine problems discussed in the
previous section. Here the multi-machine lower bound deviations are on average in the 6-7% range, whereas
for the single machine data these were in the 1-2% range. Therefore adding capacity variation to a multi-
machine problem may produce different behavior than for a single machine. In this case capacity variation
appears to have made it easier to find good areas of the search space and therefore good solutions. In terms
of finding an optimal solution, however, we predict that adding capacity variation will still increase the
roughness of the search landscape and therefore increase the difficulty of finding the exact optimal solution
as we observed with the results from the single machine data.
Table 8 shows similar lower bound deviation patterns to the results for instances without capacity vari-
ation presented in Table 6. The CPU times, however, are different - demonstrating the fact that instances
16
with capacity variation, no matter what the changes are, tend to be solved more quickly than those without
capacity variation. Again, by allowing jobs to be processed on more machines (MProb increasing from 60%
to 80%), the average lower bound deviation tends to increase independently of capacity variation, while
MBal makes very little difference to the performance.
When we analyze the performance of the heuristics by problem type, we see that the best heuristic for
each problem class is almost exactly the same for problems with capacity variation as those for the problems
without capacity variation, with the exception of problem type 2-20-10-0.8-0.5-100-80-20. For problem type
3-15-10-0.8-0.5-50-80-20 it is clear that XPHRF tended to become stuck in local minima which both INSRF
and FOHRF9 are able to get out of or avoid altogether. This particular class was the only one where XPHRF
performed considerably worse than the other techniques, however it does demonstrate the importance of the
heuristic being able to climb out of local minima.
5. Conclusions
In this paper we introduced a novel Mixed Integer Programming (MIP) based Iterative Neighborhood
Search heuristic (INSRF) to solve the Capacitated Lot Sizing and Scheduling problem with sequence depen-
dent setup times and costs in single and multi-machine settings. The algorithm is composed of two steps:
a local search phase to intensify the search and a neighborhood modification phase, in order to break out
of local minima. INSRF essentially solves a series of biased selected subMIPs of different dimensions in an
iterative fashion, therefore combining features of exact enumeration methods with approximate procedures.
We showed with extensive computational experiments on a number of very difficult large-size instances
that INSRF outperforms default CPLEX 12.1 and other approaches reported in the literature in terms
of quality and often in running times, such as pure meta-heuristics and other MIP-based heuristics (e.g.
fix-and-optimize or exchange).
Our findings also indicate that with higher setup costs per unit of setup time, the problem instances
become more difficult to solve for all the heuristics, but INSRF is not as adversely affected as the other
solution procedures. For problems involving more than one machine, INSRF can still be used in an effective
way. However, it must be noted that the limits on solving time play an important role in determining the
quality of the solutions produced. The inclusion of the capacity variation feature produces different results
whether we are facing single-machine or multi-machine settings. For the case of INSRF, the results are
slightly better with the variation of capacity, but the running times vary significantly. Nevertheless, and
based on the output of the other heuristics, we may infer that, when compared to problems without capacity
variation, the number of local optima increases with this characteristic. With regards to the assignment
17

matrix, the number of machines a job may be allocated to appears to influence the performance of multi-
machine problems, but the impact of balancing the jobs between machines seems negligible.
This work raised several issues, which remain as interesting and challenging topics for future research.
Firstly, INSRF finds local optima, but not necessarily global optima. It incorporates a simple mechanism
to escape local minima, however other more sophisticated techniques may provide more efficient ways of
crossing barriers in the solution space typology. Secondly, all the partitions considered in INSRF are based
on the product and/or period dimensions, but not on the machines, i.e., each subMIP takes into account
all the machines simultaneously. Naturally, these heuristics could be extended to select in each iteration a
subset of machines. This generalization is straightforward; the way the sets of binary variables should be
partitioned (here and in other types of problems – e.g. in the multi-level setting, the decomposition may
be carried out by the levels of the bill-of-materials) needs to be investigated. Finally, it seems promising to
devise a partition-based heuristic that throughout the search is able to dynamically change the dimensions of
the partition (number of products, periods and machines) based on the performance of the algorithm (MIP
gap and computational time to solve each iteration until optimality).
6. Acknowledgments
The authors would like to thank the two anonymous referees whose feedback helped improve the overall
quality of this paper.
References
[1] N. Absi and S. Kedad-Sidhoum. MIP-based heuristics for multi-item capacitated lot-sizing problem
with setup times and shortage costs. Rairo-Operations Research, 41(2):171–192, 2007.
[2] B. Almada-Lobo and R. James. Neighbourhood search metaheuristics for capacitated lotsizing with
sequence-dependent setups. International Journal of Production Research, 48(3):861–878, 2010.
[3] B. Almada-Lobo, D. Klabjan, M. A. Carravilla, and J. F. Oliveira. Single machine multi-product
capacitated lotsizing with sequence-dependent setups. International Journal of Production Research,
45(20):4873–4894, 2007.
[4] S. Araujo, N. Arenales, and A. R. Clark. Lot sizing and furnace scheduling in small foundries. Computers
and Operations Research, 35(3):916–932, 2008.
[5] I. Barany, T. J. Vanroy, and L. A. Wolsey. Strong formulations for multi-item capacitated lot sizing.
Management Science, 30(10):1255–1261, 1984.
18
[6] P. Beraldi, G. Ghiani, A. Grieco, and E. Guerriero. Rolling-horizon and fix-and-relax heuristics for the
parallel machine lot-sizing and scheduling problem with sequence-dependent set-up costs. Computers
and Operations Research, 35(11):3644–3656, 2008.
[7] G. Bitran and H. Yanasse. Computational complexity of the capacitated lot size problem. Management
Science, 28(10):1174–1186, 1982.
[8] L. Buschkhl, F. Sahling, S. Helber, and H. Tempelmeier. Dynamic capacitated lotsizing - a classification
and review of the literature on “big bucket” problems. OR Spectrum, 32:231–261, 2010.
[9] A. R. Clark, B. Almada-Lobo, and C. Almeder. Editorial on lotsizing and scheduling: industrial
extensions and research opportunities. Accepted for publication in International Journal of Production
Research, 2010.
[10] A. Federgruen, J. Meissner, and M. Tzur. Progressive interval heuristics for multi-item capacitated
lot-sizing problems. Operations Research, 55(3):490–502, 2007.
[11] D. Ferreira, R. Morabito, and S. Rangel. Solution approaches for the soft drink integrated production
lot sizing and scheduling problem. European Journal of Operational Research, 196:697–706, 2009.
[12] J. M. Framinan and R. Pastor. A proposal for a hybrid meta-strategy for combinatorial optimization
problems. Journal of Heuristics, 14(4):375–390, 2008.
[13] K. Haase. Capacitated lot-sizing with sequence dependent setup costs. Operations Research Spektrum,
18:51–59, 1996.
[14] S. Helber and F. Sahling. A fix-and-optimize approach for the multi-level capacitated lot sizing problem.
International Journal of Production Economics, 123:247–256, 2010.
[15] R. Jans. Solving lot-sizing problems on parallel identical machines using symmetry-breaking constraints.
Informs Journal on Computing, 21(1):123–136, 2009.
[16] C. Merce and G. Fontan. MIP-based heuristics for capacitated lotsizing problems. International Journal
of Production Economics, 85(1):97–111, 2003.
[17] Y. Pochet and L. A. Wolsey. Production Planning by Mixed Integer Programming. Springer Series in
Operations Research and Financial Engineering. Springer, New York, 2006.
[18] J. Puchinger and G. R. Raidl. Combining metaheuristics and exact algorithms in combinatorial opti-
mization: A survey and classification. In Artificial Intelligence and Knowledge Engineering Applications:
a Bioinspired Approach, Pt 2, Proceedings, volume 3562 of Lecture Notes in Computer Science, pages
41–53. 2005.
19
[19] D. Quadt and H. Kuhn. Capacitated lot-sizing wih extensions: a review. 4OR, 6:61–83, 2008.
[20] F. Sahling, L. Buschkhl, H. Tempelmeier, and S. Helber. Solving a multi-level capacitated lot sizing
problem with multi-period setup carry-over via a fix-and-optimize heuristic. Computers and Operations
Research, 36(9):2546–2553, 2009.
[21] H. Stadtler. Multilevel lot sizing with setup times and multiple constrained resources: Internally rolling
schedules with lot-sizing windows. Operations Research, 51(3):487–502, 2003.
[22] X. Y. Zhu and W. E. Wilhelm. Scheduling and lot sizing with sequence-dependent setup: A literature
review. IIE Transactions, 38(11):987–1007, 2006.
20
Table
1:
Aver
age
%D
evia
tion
from
the
Low
erB
ound
and
Com
puta
tionalT
imes
for
CLSD
-SM
wit
hno
Capaci
tyV
ari
ati
on
Pro
ble
mType
Aver
age
%D
evia
tion
from
the
Low
erB
ound
Tim
ein
Sec
onds
N-T
-Cut-
θX
PH
OC
XPH
RF
TS
VN
SFO
HR
F9
CPLEX
INSR
FX
PH
OC
XPH
RF
TS
VN
SFO
HR
F9
CPLEX
INSR
F
15-5
-0.6
-50
0.5
7%
0.4
6%
2.4
8%
1.0
5%
0.5
0%
0.2
2%
0.2
2%
2.9
5.3
39.0
600.2
6.7
23.1
41.5
15-5
-0.6
-100
2.3
9%
1.8
2%
6.4
0%
3.8
5%
1.7
8%
1.3
7%
1.3
7%
8.7
14.9
30.7
493.3
16.7
56.9
125.4
15-5
-0.8
-50
0.7
3%
0.6
4%
3.1
1%
1.4
2%
0.6
2%
0.4
0%
0.4
0%
4.8
8.3
13.3
716.5
9.3
20.3
46.3
15-5
-0.8
-100
2.3
3%
2.0
8%
6.5
6%
3.8
3%
2.2
4%
1.7
3%
1.7
6%
22.4
28.7
9.7
589.2
73.7
851.8
735.7
15-1
0-0
.6-5
00.6
7%
0.6
4%
3.2
7%
2.3
3%
0.5
8%
0.4
0%
0.3
2%
10.7
18.5
767.8
2755.3
23.1
2539.2
950.9
15-1
0-0
.6-1
00
3.2
4%
2.9
5%
7.5
2%
5.8
5%
3.6
0%
2.7
0%
2.3
0%
19.2
52.1
84.0
2730.7
56.1
3600.0
715.2
15-1
0-0
.8-5
00.8
4%
0.8
9%
3.7
5%
2.3
9%
0.8
8%
0.6
0%
0.5
9%
16.0
24.8
398.2
2694.7
35.1
2444.7
916.3
15-1
0-0
.8-1
00
3.4
2%
2.8
3%
9.0
3%
6.5
3%
3.2
6%
3.4
0%
2.5
9%
33.0
94.2
53.4
2736.7
217.5
3600.0
411.6
15-1
5-0
.6-5
00.7
7%
0.5
8%
3.8
2%
3.2
6%
0.7
5%
0.6
4%
0.4
4%
19.5
34.3
1344.6
2822.1
42.2
3275.9
332.1
15-1
5-0
.6-1
00
3.6
9%
3.5
4%
9.0
5%
7.7
8%
3.9
1%
-3.0
1%
31.7
102.1
598.9
2810.0
112.1
3600.5
1211.0
15-1
5-0
.8-5
00.9
0%
0.8
4%
4.1
0%
3.3
4%
0.8
9%
-0.7
8%
30.5
44.8
428.4
2664.0
63.4
3300.7
590.9
15-1
5-0
.8-1
00
3.8
0%
3.4
6%
10.1
7%
8.1
6%
3.7
4%
-3.0
4%
57.7
189.0
239.5
2791.8
278.8
3600.1
1437.8
25-5
-0.6
-50
0.2
8%
0.1
7%
3.3
8%
2.2
4%
0.1
6%
0.0
9%
0.0
9%
36.2
34.8
566.7
1894.4
35.5
94.0
268.7
25-5
-0.6
-100
1.2
3%
0.8
5%
5.8
2%
4.6
6%
0.8
8%
0.6
6%
0.6
4%
79.2
95.7
127.6
1646.8
160.5
1737.9
1403.7
25-5
-0.8
-50
0.5
2%
0.4
3%
3.8
1%
2.5
1%
0.4
0%
0.2
7%
0.2
7%
54.8
79.3
101.3
1996.7
272.4
224.6
496.3
25-5
-0.8
-100
1.1
6%
0.9
5%
6.5
6%
4.0
2%
1.0
0%
0.8
5%
0.8
9%
176.3
283.5
193.2
1755.7
939.8
3369.6
1183.9
25-1
0-0
.6-5
00.6
5%
0.5
0%
4.2
2%
4.2
8%
0.4
8%
-0.4
5%
103.0
137.3
1887.2
3099.7
158.5
3600.1
253.0
25-1
0-0
.6-1
00
2.2
3%
2.0
3%
7.4
7%
7.1
0%
2.5
9%
-1.9
6%
242.4
274.1
789.2
2908.1
308.3
3600.9
867.7
25-1
0-0
.8-5
00.6
2%
0.5
3%
4.7
4%
4.1
5%
0.6
9%
-0.4
7%
176.5
195.0
1377.1
3086.9
355.1
3602.1
1063.0
25-1
0-0
.8-1
00
2.0
6%
1.7
8%
8.8
2%
6.7
2%
2.0
3%
-1.7
0%
475.1
455.6
895.8
2943.1
985.5
3600.0
837.9
25-1
5-0
.6-5
00.6
0%
0.5
4%
4.7
4%
4.8
8%
0.5
8%
-0.3
7%
161.0
347
2785.8
3053.0
370.8
3600.8
1262.0
25-1
5-0
.6-1
00
2.4
6%
2.1
7%
9.0
1%
9.6
2%
2.7
6%
-2.1
3%
337.6
822.9
1188.3
2870.3
749.5
3601.1
1851.4
25-1
5-0
.8-5
00.6
4%
0.6
2%
5.2
8%
5.1
1%
0.7
5%
-0.5
1%
336.8
359.6
2381.5
2822.9
711.0
3607.4
2330.3
25-1
5-0
.8-1
00
2.3
8%
2.2
2%
10.4
8%
8.9
6%
2.4
0%
-2.0
7%
597.3
967.4
1163.3
2964.0
1406.7
3600.3
1406.4
Over
all
Aver
age
1.5
9%
1.4
0%
5.9
8%
4.7
5%
1.5
6%
-1.1
8%
126.4
194.5
727.7
2310.3
307.8
2548.0
864.1
Note
:A
‘-’in
dic
ate
sno
solu
tion
was
found
inth
eone
hour
tim
elim
it
21
Table
2:
Aver
age
%D
evia
tion
from
the
Low
erB
ound
and
Com
puta
tionalT
ime
for
CLSD
-SM
wit
hno
Capaci
tyV
ari
ati
on
-C
ate
gori
sed
Sum
mary
Aver
age
%D
evia
tion
from
the
Low
erB
ound
Aver
age
Tim
ein
Sec
onds
XPH
OC
XPH
RF
TS
VN
SFO
HR
F9
CPLEX
INSR
FX
PH
OC
XPH
RF
TS
VN
SFO
HR
F9
CPLEX
INSR
F
Pro
duct
s15
1.9
5%
1.7
3%
5.7
7%
4.1
5%
1.8
9%
-1.4
0%
2033.7
50.1
59.2
51.4
77.9
2242.8
626.2
N25
1.2
4%
1.0
6%
6.1
9%
5.3
5%
1.2
3%
-0.9
6%
2586.8
252.2
342.7
337.7
537.8
2853.2
1102.0
Per
iods
51.1
5%
0.9
2%
4.7
6%
2.9
5%
0.9
5%
0.7
0%
0.7
0%
1211.6
60.3
77.0
68.8
189.3
797.3
537.7
T10
1.7
2%
1.5
2%
6.1
0%
4.9
2%
1.7
6%
-1.3
0%
2869.4
164.3
171.9
156.4
267.4
3323.4
752.0
15
1.9
1%
1.7
5%
7.0
8%
6.3
9%
1.9
7%
-1.5
4%
2849.8
228.8
353.9
358.4
466.8
3523.4
1302.7
Cap.
Uti
l.0.6
1.5
6%
1.3
5%
5.6
0%
4.7
4%
1.5
5%
-1.1
1%
2307.0
74.8
162.6
161.6
170.0
2444.2
773.5
Cut
0.8
1.6
2%
1.4
4%
6.3
7%
4.7
6%
1.5
8%
-1.2
6%
2313.5
227.4
239.4
227.5
445.7
2651.8
954.7
Set
up
Cost
50
0.6
5%
0.5
7%
3.8
9%
3.0
8%
0.6
1%
-0.4
1%
2350.5
75.1
122.1
107.4
173.6
2194.4
712.6
θ100
2.5
3%
2.2
2%
8.0
7%
6.4
2%
2.5
2%
-1.9
5%
2270.0
227.1
279.8
281.7
442.1
2901.6
1015.6
Over
all
Aver
age
1.5
9%
1.4
0%
5.9
8%
4.7
5%
1.5
6%
-1.1
8%
126.4
194.5
727.7
2310.3
307.8
2548.0
864.1
Note
:A
‘-’in
dic
ate
sno
solu
tion
was
found
inth
eone
hour
tim
elim
it
22
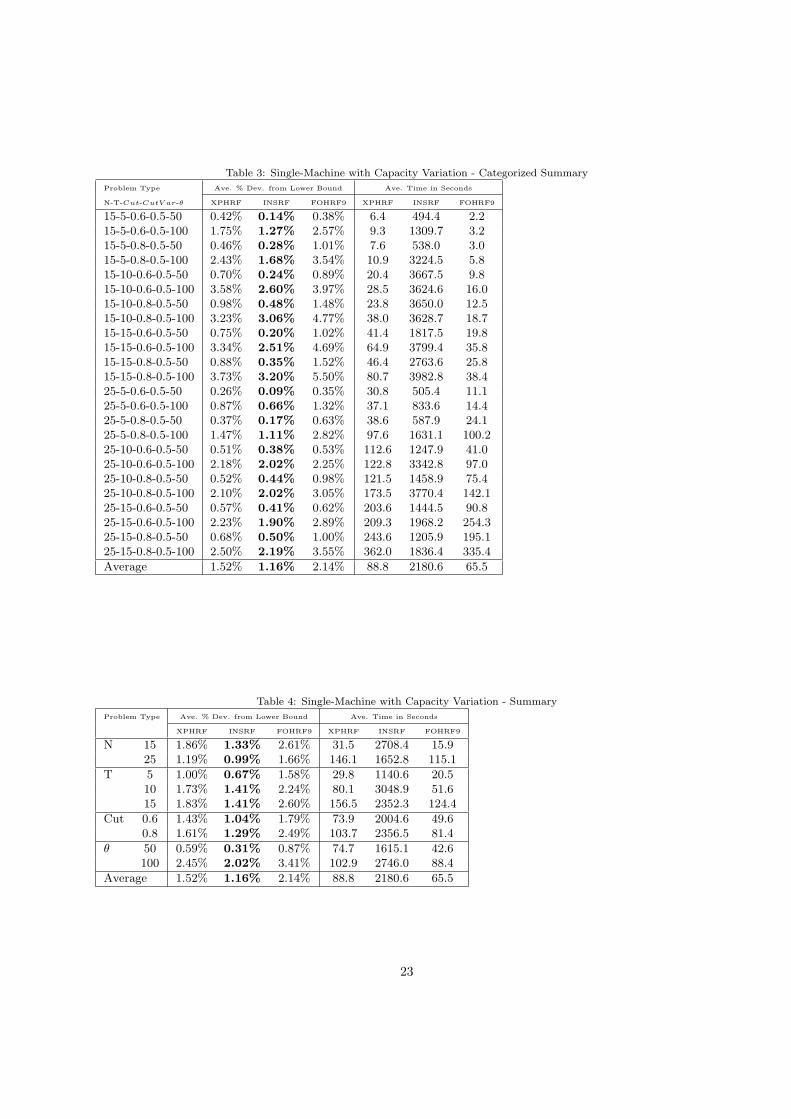
Table 3: Single-Machine with Capacity Variation - Categorized Summary
Problem Type Ave. % Dev. from Lower Bound Ave. Time in Seconds
N-T-Cut-CutV ar-θ XPHRF INSRF FOHRF9 XPHRF INSRF FOHRF9
15-5-0.6-0.5-50 0.42% 0.14% 0.38% 6.4 494.4 2.215-5-0.6-0.5-100 1.75% 1.27% 2.57% 9.3 1309.7 3.215-5-0.8-0.5-50 0.46% 0.28% 1.01% 7.6 538.0 3.015-5-0.8-0.5-100 2.43% 1.68% 3.54% 10.9 3224.5 5.815-10-0.6-0.5-50 0.70% 0.24% 0.89% 20.4 3667.5 9.815-10-0.6-0.5-100 3.58% 2.60% 3.97% 28.5 3624.6 16.015-10-0.8-0.5-50 0.98% 0.48% 1.48% 23.8 3650.0 12.515-10-0.8-0.5-100 3.23% 3.06% 4.77% 38.0 3628.7 18.715-15-0.6-0.5-50 0.75% 0.20% 1.02% 41.4 1817.5 19.815-15-0.6-0.5-100 3.34% 2.51% 4.69% 64.9 3799.4 35.815-15-0.8-0.5-50 0.88% 0.35% 1.52% 46.4 2763.6 25.815-15-0.8-0.5-100 3.73% 3.20% 5.50% 80.7 3982.8 38.425-5-0.6-0.5-50 0.26% 0.09% 0.35% 30.8 505.4 11.125-5-0.6-0.5-100 0.87% 0.66% 1.32% 37.1 833.6 14.425-5-0.8-0.5-50 0.37% 0.17% 0.63% 38.6 587.9 24.125-5-0.8-0.5-100 1.47% 1.11% 2.82% 97.6 1631.1 100.225-10-0.6-0.5-50 0.51% 0.38% 0.53% 112.6 1247.9 41.025-10-0.6-0.5-100 2.18% 2.02% 2.25% 122.8 3342.8 97.025-10-0.8-0.5-50 0.52% 0.44% 0.98% 121.5 1458.9 75.425-10-0.8-0.5-100 2.10% 2.02% 3.05% 173.5 3770.4 142.125-15-0.6-0.5-50 0.57% 0.41% 0.62% 203.6 1444.5 90.825-15-0.6-0.5-100 2.23% 1.90% 2.89% 209.3 1968.2 254.325-15-0.8-0.5-50 0.68% 0.50% 1.00% 243.6 1205.9 195.125-15-0.8-0.5-100 2.50% 2.19% 3.55% 362.0 1836.4 335.4
Average 1.52% 1.16% 2.14% 88.8 2180.6 65.5
Table 4: Single-Machine with Capacity Variation - Summary
Problem Type Ave. % Dev. from Lower Bound Ave. Time in Seconds
XPHRF INSRF FOHRF9 XPHRF INSRF FOHRF9
N 15 1.86% 1.33% 2.61% 31.5 2708.4 15.925 1.19% 0.99% 1.66% 146.1 1652.8 115.1
T 5 1.00% 0.67% 1.58% 29.8 1140.6 20.510 1.73% 1.41% 2.24% 80.1 3048.9 51.615 1.83% 1.41% 2.60% 156.5 2352.3 124.4
Cut 0.6 1.43% 1.04% 1.79% 73.9 2004.6 49.60.8 1.61% 1.29% 2.49% 103.7 2356.5 81.4
θ 50 0.59% 0.31% 0.87% 74.7 1615.1 42.6100 2.45% 2.02% 3.41% 102.9 2746.0 88.4
Average 1.52% 1.16% 2.14% 88.8 2180.6 65.5
23
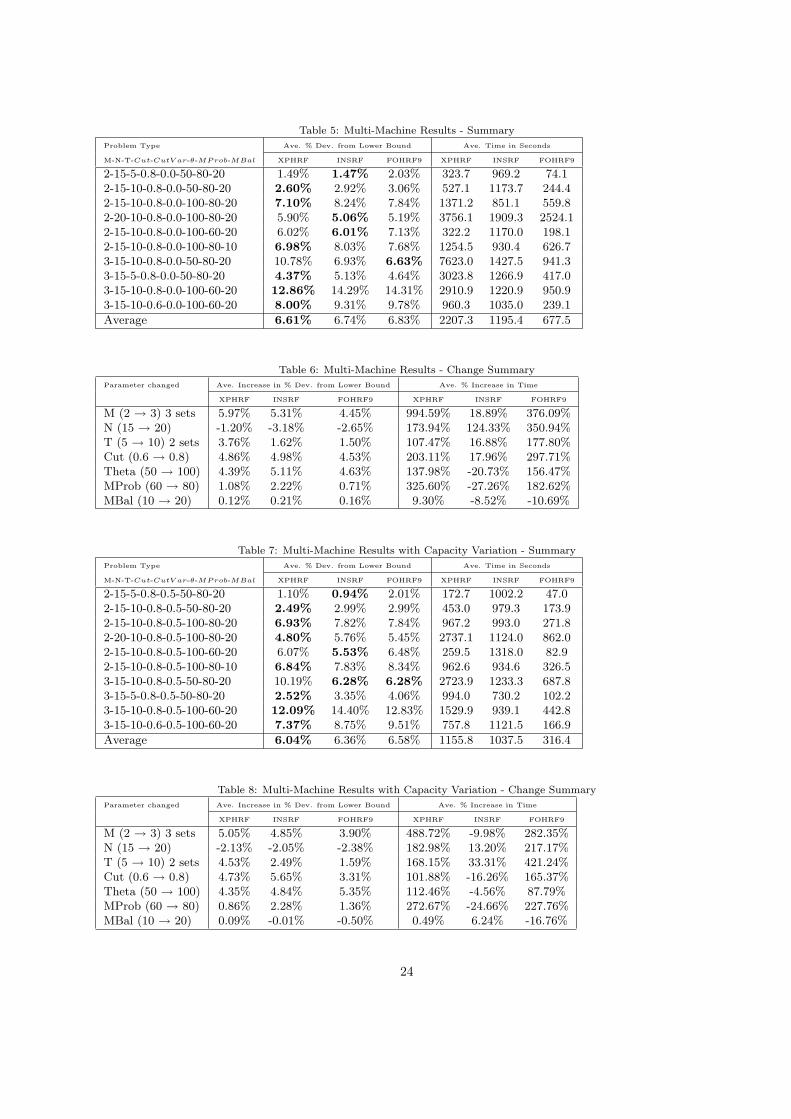
Table 5: Multi-Machine Results - Summary
Problem Type Ave. % Dev. from Lower Bound Ave. Time in Seconds
M-N-T-Cut-CutV ar-θ-MP rob-MBal XPHRF INSRF FOHRF9 XPHRF INSRF FOHRF9
2-15-5-0.8-0.0-50-80-20 1.49% 1.47% 2.03% 323.7 969.2 74.12-15-10-0.8-0.0-50-80-20 2.60% 2.92% 3.06% 527.1 1173.7 244.42-15-10-0.8-0.0-100-80-20 7.10% 8.24% 7.84% 1371.2 851.1 559.82-20-10-0.8-0.0-100-80-20 5.90% 5.06% 5.19% 3756.1 1909.3 2524.12-15-10-0.8-0.0-100-60-20 6.02% 6.01% 7.13% 322.2 1170.0 198.12-15-10-0.8-0.0-100-80-10 6.98% 8.03% 7.68% 1254.5 930.4 626.73-15-10-0.8-0.0-50-80-20 10.78% 6.93% 6.63% 7623.0 1427.5 941.33-15-5-0.8-0.0-50-80-20 4.37% 5.13% 4.64% 3023.8 1266.9 417.03-15-10-0.8-0.0-100-60-20 12.86% 14.29% 14.31% 2910.9 1220.9 950.93-15-10-0.6-0.0-100-60-20 8.00% 9.31% 9.78% 960.3 1035.0 239.1
Average 6.61% 6.74% 6.83% 2207.3 1195.4 677.5
Table 6: Multi-Machine Results - Change Summary
Parameter changed Ave. Increase in % Dev. from Lower Bound Ave. % Increase in Time
XPHRF INSRF FOHRF9 XPHRF INSRF FOHRF9
M (2 → 3) 3 sets 5.97% 5.31% 4.45% 994.59% 18.89% 376.09%N (15 → 20) -1.20% -3.18% -2.65% 173.94% 124.33% 350.94%T (5 → 10) 2 sets 3.76% 1.62% 1.50% 107.47% 16.88% 177.80%Cut (0.6 → 0.8) 4.86% 4.98% 4.53% 203.11% 17.96% 297.71%Theta (50 → 100) 4.39% 5.11% 4.63% 137.98% -20.73% 156.47%MProb (60 → 80) 1.08% 2.22% 0.71% 325.60% -27.26% 182.62%MBal (10 → 20) 0.12% 0.21% 0.16% 9.30% -8.52% -10.69%
Table 7: Multi-Machine Results with Capacity Variation - Summary
Problem Type Ave. % Dev. from Lower Bound Ave. Time in Seconds
M-N-T-Cut-CutV ar-θ-MP rob-MBal XPHRF INSRF FOHRF9 XPHRF INSRF FOHRF9
2-15-5-0.8-0.5-50-80-20 1.10% 0.94% 2.01% 172.7 1002.2 47.02-15-10-0.8-0.5-50-80-20 2.49% 2.99% 2.99% 453.0 979.3 173.92-15-10-0.8-0.5-100-80-20 6.93% 7.82% 7.84% 967.2 993.0 271.82-20-10-0.8-0.5-100-80-20 4.80% 5.76% 5.45% 2737.1 1124.0 862.02-15-10-0.8-0.5-100-60-20 6.07% 5.53% 6.48% 259.5 1318.0 82.92-15-10-0.8-0.5-100-80-10 6.84% 7.83% 8.34% 962.6 934.6 326.53-15-10-0.8-0.5-50-80-20 10.19% 6.28% 6.28% 2723.9 1233.3 687.83-15-5-0.8-0.5-50-80-20 2.52% 3.35% 4.06% 994.0 730.2 102.23-15-10-0.8-0.5-100-60-20 12.09% 14.40% 12.83% 1529.9 939.1 442.83-15-10-0.6-0.5-100-60-20 7.37% 8.75% 9.51% 757.8 1121.5 166.9
Average 6.04% 6.36% 6.58% 1155.8 1037.5 316.4
Table 8: Multi-Machine Results with Capacity Variation - Change Summary
Parameter changed Ave. Increase in % Dev. from Lower Bound Ave. % Increase in Time
XPHRF INSRF FOHRF9 XPHRF INSRF FOHRF9
M (2 → 3) 3 sets 5.05% 4.85% 3.90% 488.72% -9.98% 282.35%N (15 → 20) -2.13% -2.05% -2.38% 182.98% 13.20% 217.17%T (5 → 10) 2 sets 4.53% 2.49% 1.59% 168.15% 33.31% 421.24%Cut (0.6 → 0.8) 4.73% 5.65% 3.31% 101.88% -16.26% 165.37%Theta (50 → 100) 4.35% 4.84% 5.35% 112.46% -4.56% 87.79%MProb (60 → 80) 0.86% 2.28% 1.36% 272.67% -24.66% 227.76%MBal (10 → 20) 0.09% -0.01% -0.50% 0.49% 6.24% -16.76%
24