makalah teknik kontrol otomatis
TRANSCRIPT
MAKALAHTEKNIK KONTROL OTOMATIS
Disusun Oleh :
Donny Febrianto Kusuma
(1420110021)
Semester VI
Program Studi Teknik Mesin
Fakultas Sains & Teknologi
UNIVERSITAS ISLAM AS-SYAFI'IYAH
JAKARTA
2014
2
KATA PENGANTAR
Puji syukur senantiasa saya panjatkan kehadirat Allah
SWT atas Karunia Rahmat & Hidayah-Nya, sehingga Makalah
Teknik Kontrol Otomatis ini dapat saya selesaikan.
Saya menyadari bahwa Makalah Teknik Kontrol Otomatis ini
jauh dari sempurna, mengingat keterbatasan waktu, tenaga &
kemampuan yang ada sehingga kritik & saran yang bersifat
membangun sangat saya harapkan.
Semoga Makalah Teknik Kontrol Otomatis ini memberikan
manfaat bagi pembaca, terutama saya sendiri sebagai salah
satu upaya perbaikan dalam proses pembelajaran yang berdampak
pada peningkatan mutu pendidikan.
Jakarta,
September 2014
Penyusun
ii
DAFTAR ISI
KATA PENGANTAR ii
DAFTAR ISI iii
BAB I PENDAHULUAN 1
1.1 Latar Belakang Masalah 1
1.2 Maksud dan Tujuan 2
1.3 Batasan Masalah 2
1.4 Sistimatika Penulisan 2
BAB II Sistem Kontrol Otomatis Pada AC Split 4
2.1 Pengertian Secara Umum Tentang Sistem Kontrol
Otomatis 4
2.2 Sistem Kontrol Otomatis Pada AC Split 7
2.3 Komponen-Komponen Sistem Kontrol Otomatis Pada AC
Split 9
iii
2.4 Prinsip dan Proses Kerja Sistem Kontrol Otomatis
Pada AC Split 13
KESIMPULAN 14
3.1 Hasil Analisa Sistem Kontrol Otomatis Pada AC Split
14
3.2 Kesimpulan dan Saran 16
iv
BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
Sistem kontrol atau kendali saat ini mulai bergeser pada
otomatisasi sistem kontrol yang menuntut penggunaan komputer,
sehingga campur tangan manusia dalam pengontrolan sangat
kecil. Bila dibandingkan dengan pengerjaan secara manual,
sistem peralatan yang dikendalikan oleh komputer akan
memberikan keuntungan dalam hal efisiensi, keamanan, dan
ketelitian. Kemampuan komputer, baik perangkat keras
(hardware) maupun perangkat lunak (software), dapat
dimanfaatkan untuk berbagai aplikasi pengendalian, seperti
pengendalian suhu.
Pendingin ruangan atau AC (Air Conditioner) memiliki banyak
sekali variasi, fungsi, dan bentuk, yang dalam hal ini
disesuaikan pada bentuk dan kapasitas besarnya ruangan yang
akan menggunakan fasilitas pendingin ruangan tersebut. Salah
satunya adalah pendingin ruangan atau AC yang menggunakan
sistem otomatis, dalam hal inisudah menggunakan remote
control dalam mengatur suhu atau temperatur ruangan yang
dikehendaki. Akan tetapi, pada kebanyakan pendingin ruangan
atau AC, saklar on/off dinyalakan secara manual melalui tombol
1
pada remote.Sehingga temperatur standart yang diinginkan
berubah-ubah karena adanya keinginan tiap individu dan
aktivitas individu yang keluar masuk ruangan tersebut.Dengan
alat pengontrol ini dapat menghidupkan dan mematikan AC
secara otomatis, sehingga dapat menghemat daya listrik yang
dipakai pada ruangan tersebut.
Dengan kata lain nantinya dapat menghemat pengeluaran
biaya beban yang disebabkan konsumsi penggunaan AC yang
tidak efisien tersebut.Atas dasar alasan inilah, penulis
membuat sebuah sistem ON- OFF AC (Air Conditioner) berbasis
mikrokontroler ATMega16 pada ruang dengan monitoring via web.
Sistem ini menggunakan mikrokontroler ATMega16 sebagai
pengendaliutama. Sebagai input, digunakan sensor suhuLM35.
LCD 16x2 (M1632) digunakan sebagai display untuk menampilkan
hasil pembacaan suhu ruang. Sebagai pembanding atas pem-
bacaan suhu ruang dengan sensor suhu LM35, digunakan
termometer analog.
1.2 Maksud dan Tujuan
1. Untuk mengetahui tentang sistem kontrol otomatis pada
AC Split
2. Untuk mengetahui komponen dalam sistem kontrol
otomatis pada AC Split
3. Untuk mengetahui cara kerja sistem kontrol otomatis
pada AC Split
1.3 Batasan Masalah
2
Dalam makalah ini, penulis membatasi masalah dengan
cakupan materi sebagai berikut :
1. Sensor LM35 sebagai pendeteksi suhu dalam sistem
otomatisasi AC (Air Conditioner)
2. MikrokontrolerATMega16 sebagai pusat pengendali masukan
dan keluaran dalam sistemotomatisasi AC (Air Conditioner)
3. Komunikasi serial dan pemrograman
mikrokontrolerATMega16untuk system otomatisasi AC (Air
Conditioner)
1.4 Sistimatika Penulisan
Kata Pengantar
Daftar Isi
BAB 1. PENDAHULUAN
1.1 Latar Belakang Masalah
1.2 Maksud dan Tujuan
1.3 Batasan Masalah
1.4 Sistimatika Penulisan
BAB 2. SISTEM KONTROL OTOMATIS PADA AC SPLIT
2.1 Pengertian Secara Umum Tentang Sistem Kontrol
Otomatis
2.2 Sistem Kontrol Otomatis Pada AC Split
2.3 Komponen-Komponen Sistem Kontrol Otomatis Pada
AC Split
2.4 Prinsip dan Proses Kerja Sistem Kontrol
Otomatis Pada AC Split
3
BAB 3. KESIMPULAN
3.1 Hasil Analisa Sistem Kontrol Otomatis Pada AC Split
3.2 Kesimpulan dan Saran
4
BAB II
SISTEM KONTROL OTOMATIS PADA AC SPLIT
2.1. Pengertian Sistem Kontrol Otomatis
Sistem Kontrol adalah seperangkat komponen yang saling
berhubungan/dihubungkan sedemikian sehingga mampu memerintah,
mengarahkan, atau mengatur dirinya sendiri atau sistem/proses
yang lain.
Kontrol automatic atau yang dikenal dengan sistem
pengendalian otomatis (automatic control system) merupakan level
ke 2 dalam hirarki sistem otomasi..Dalam sistem otomasi
kegiatan pengontrolan dan monitoring yang biasa dilakukan
manusia bisa digantikan perannya dengan menerapkan prinsip
otomasi. Kegiatan kontrol yang dilakukan secara berulang-
ulang, kekurang presisi-an manusia dalam membaca data, serta
resiko yang mungkin timbul dari sistem yang dikontrol semakin
menguatkan kedudukan alat/mesin untuk melakukan pengontrolan
secara otomatis.5
Pengendalian otomatis (automatic control) dan piranti-
piranti pengontrol otomatis dalam perkembangannya merupakan
suatu disiplin ilmu sendiri yang disebut control engineering,
control system engineering. Dengan berkembangnya teknologi komputer
dan jaringan dimana konsep sistem otomasi dapat diwujudkan,
ditambah dengan suatu kecerdasan melalui program yang
ditanamkan dalam sistem tersebut , maka akan semakin
meringankan tugas-tugas manusia. Derajat otomasi yang makin
tinggi akan mengurangi peranan dan meringankan tugas-tugas
manusia dalam pengontrolan suatu proses.
Beberapa contoh sistem pengaturan proses-proses pada industri
modern seperti:
1. Sebagai pengontrol tekanan
2. Sebagai pengontrol temperature
3. Sebgai pengontrol kelembaban
4. Sistem aliran dalam proses industri
Mathematical tools/alat matematis yang digunakan antara lain:
Penyelesaian permasalahan dengan persamaan deferensial
dan integral
Transformasi Laplace dan variable-variable kompleks.
Transformasi z untuk pengaturan diskrit
Dan berbagai tools dan konsep yang lebih advanced
seperti fuzzy logic, neural network control system dll.
Sistem pengendalian digolongkan menjadi 2 yaitu :
6
1. Sistem Pengendalian “Untai Terbuka” (Open loop system ),
adalah sustu system yang tindakan pengendaliannya bebas
dari keluarannya.
2. Sistem Pengendalian “Untai Tertutup”(Closed Loop System ),
adalah suatu system yang tindakan pengendalianya
tergantung pada keluarannya.
2.1.1. Sistem Kendali Loop Terbuka
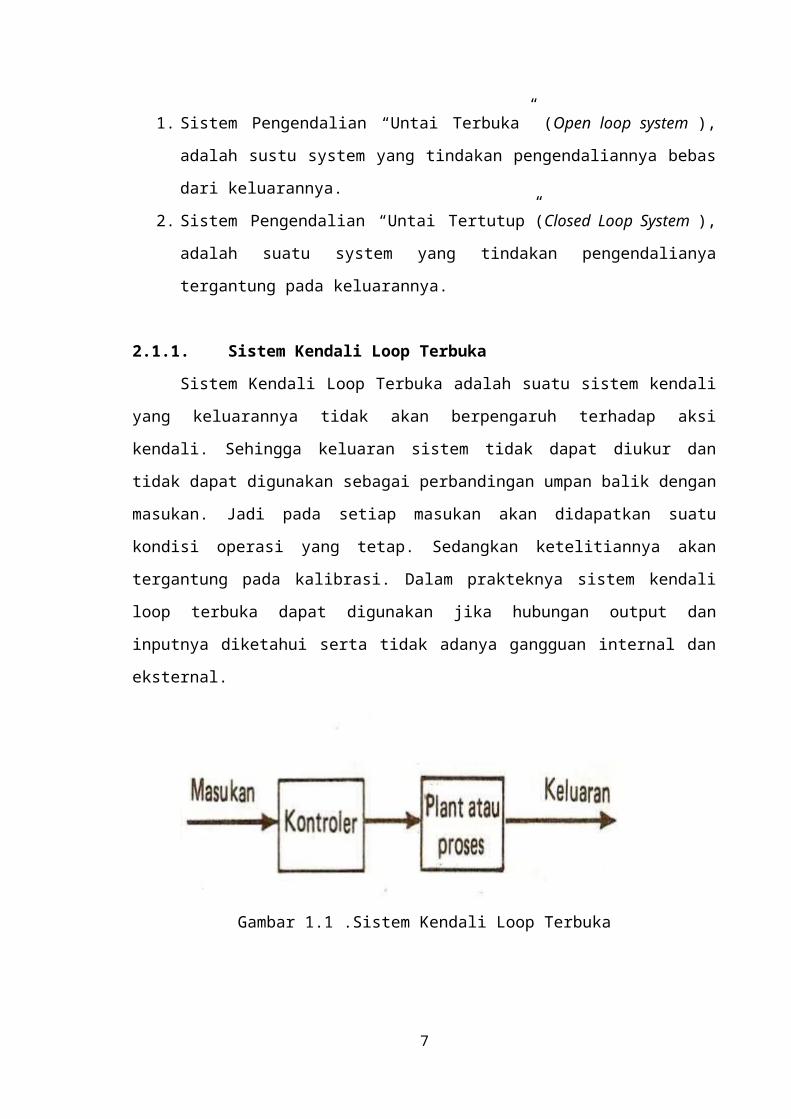
Sistem Kendali Loop Terbuka adalah suatu sistem kendali
yang keluarannya tidak akan berpengaruh terhadap aksi
kendali. Sehingga keluaran sistem tidak dapat diukur dan
tidak dapat digunakan sebagai perbandingan umpan balik dengan
masukan. Jadi pada setiap masukan akan didapatkan suatu
kondisi operasi yang tetap. Sedangkan ketelitiannya akan
tergantung pada kalibrasi. Dalam prakteknya sistem kendali
loop terbuka dapat digunakan jika hubungan output dan
inputnya diketahui serta tidak adanya gangguan internal dan
eksternal.
Gambar 1.1 .Sistem Kendali Loop Terbuka
7
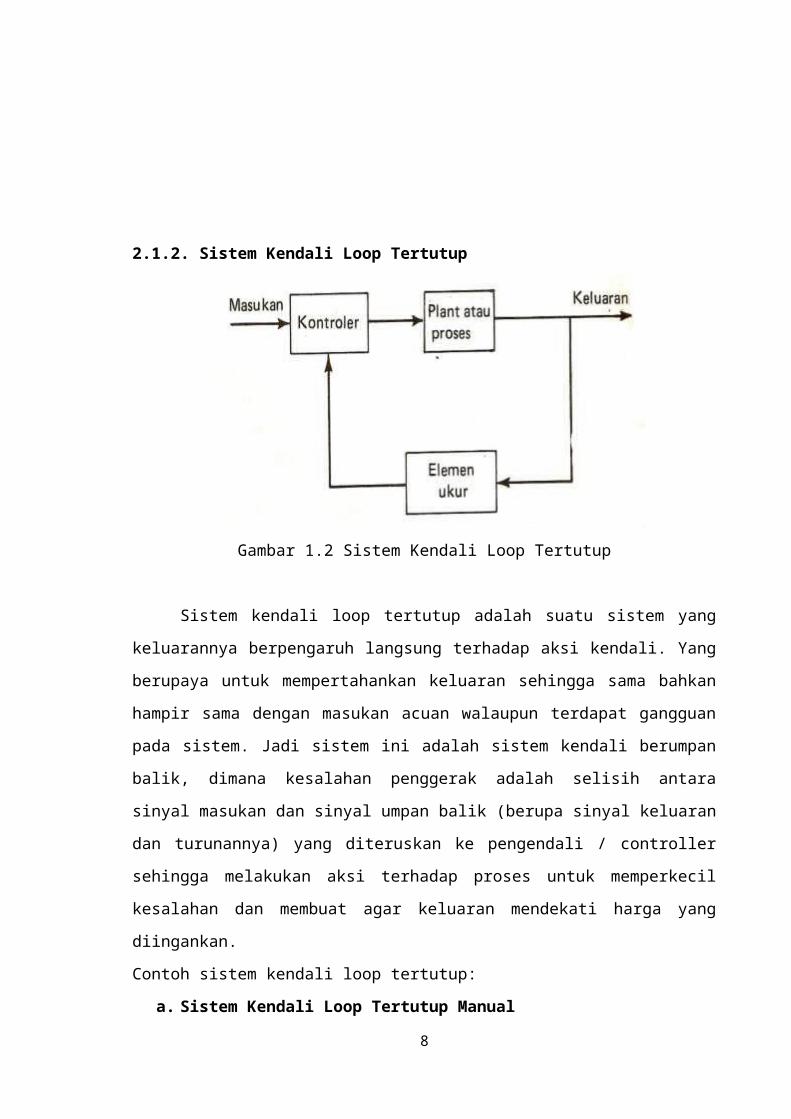
2.1.2. Sistem Kendali Loop Tertutup
Gambar 1.2 Sistem Kendali Loop Tertutup
Sistem kendali loop tertutup adalah suatu sistem yang
keluarannya berpengaruh langsung terhadap aksi kendali. Yang
berupaya untuk mempertahankan keluaran sehingga sama bahkan
hampir sama dengan masukan acuan walaupun terdapat gangguan
pada sistem. Jadi sistem ini adalah sistem kendali berumpan
balik, dimana kesalahan penggerak adalah selisih antara
sinyal masukan dan sinyal umpan balik (berupa sinyal keluaran
dan turunannya) yang diteruskan ke pengendali / controller
sehingga melakukan aksi terhadap proses untuk memperkecil
kesalahan dan membuat agar keluaran mendekati harga yang
diingankan.
Contoh sistem kendali loop tertutup:
a. Sistem Kendali Loop Tertutup Manual
8
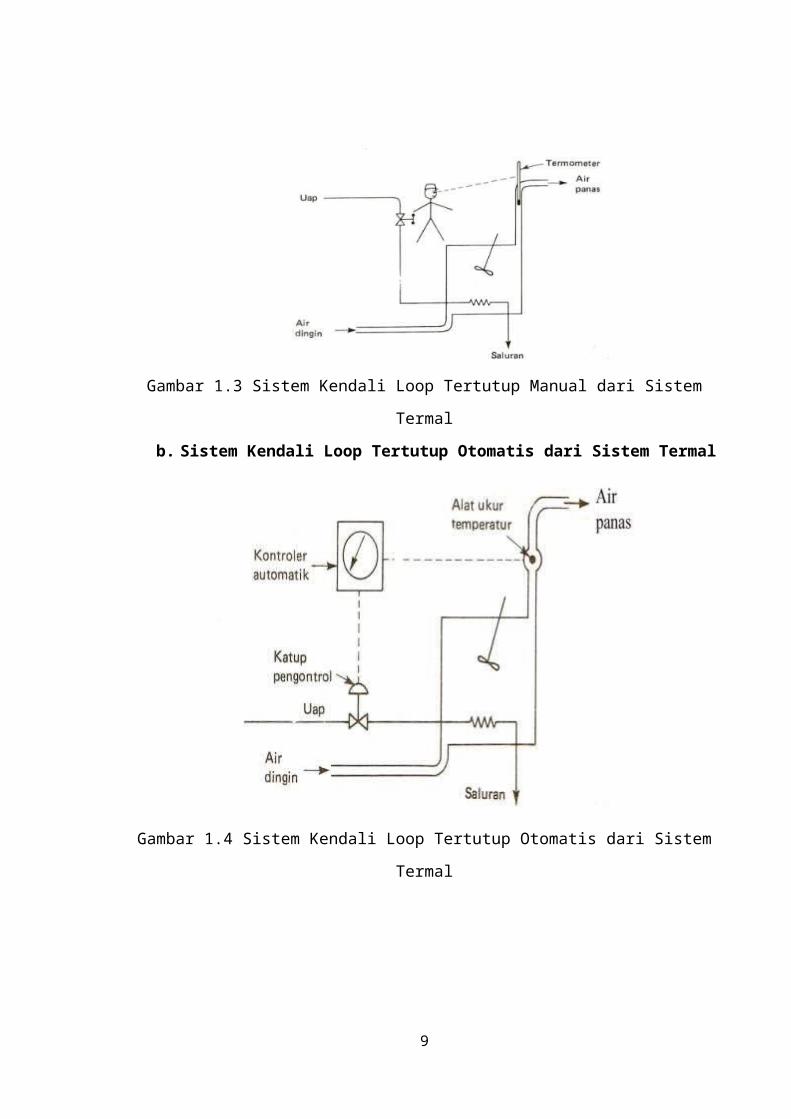
Gambar 1.3 Sistem Kendali Loop Tertutup Manual dari Sistem
Termal
b. Sistem Kendali Loop Tertutup Otomatis dari Sistem Termal
Gambar 1.4 Sistem Kendali Loop Tertutup Otomatis dari Sistem
Termal
9
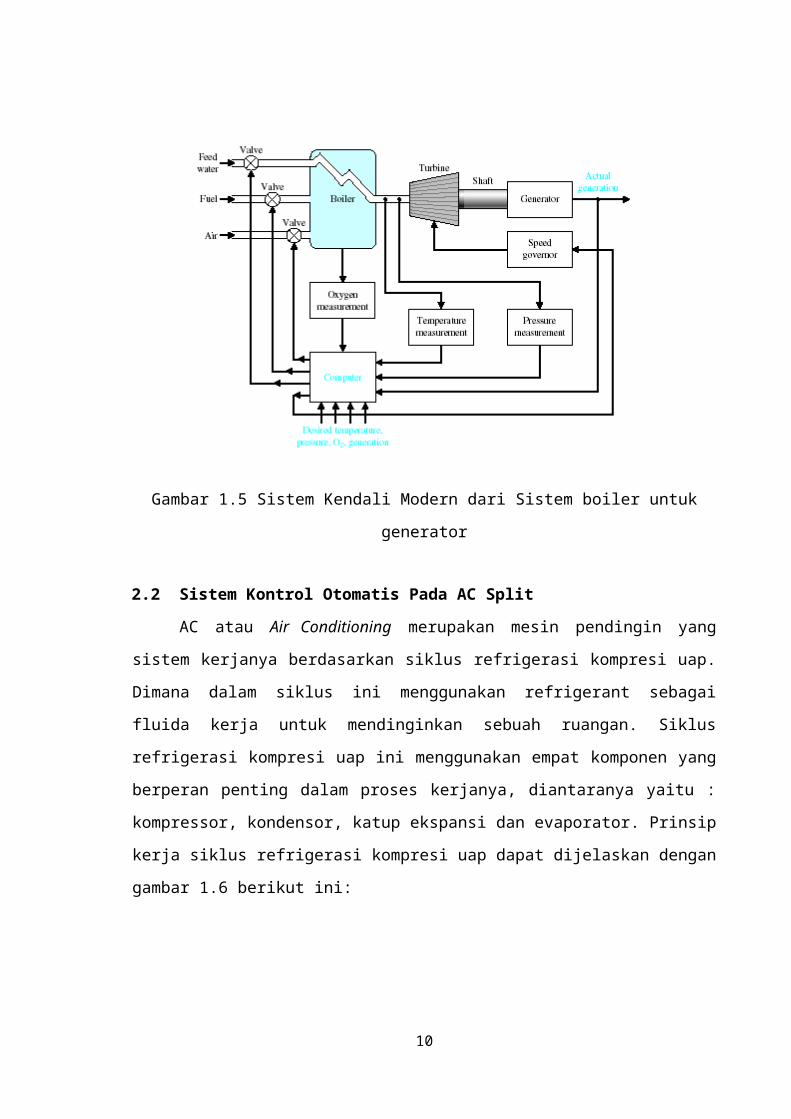
Gambar 1.5 Sistem Kendali Modern dari Sistem boiler untuk
generator
2.2 Sistem Kontrol Otomatis Pada AC Split
AC atau Air Conditioning merupakan mesin pendingin yang
sistem kerjanya berdasarkan siklus refrigerasi kompresi uap.
Dimana dalam siklus ini menggunakan refrigerant sebagai
fluida kerja untuk mendinginkan sebuah ruangan. Siklus
refrigerasi kompresi uap ini menggunakan empat komponen yang
berperan penting dalam proses kerjanya, diantaranya yaitu :
kompressor, kondensor, katup ekspansi dan evaporator. Prinsip
kerja siklus refrigerasi kompresi uap dapat dijelaskan dengan
gambar 1.6 berikut ini:
10
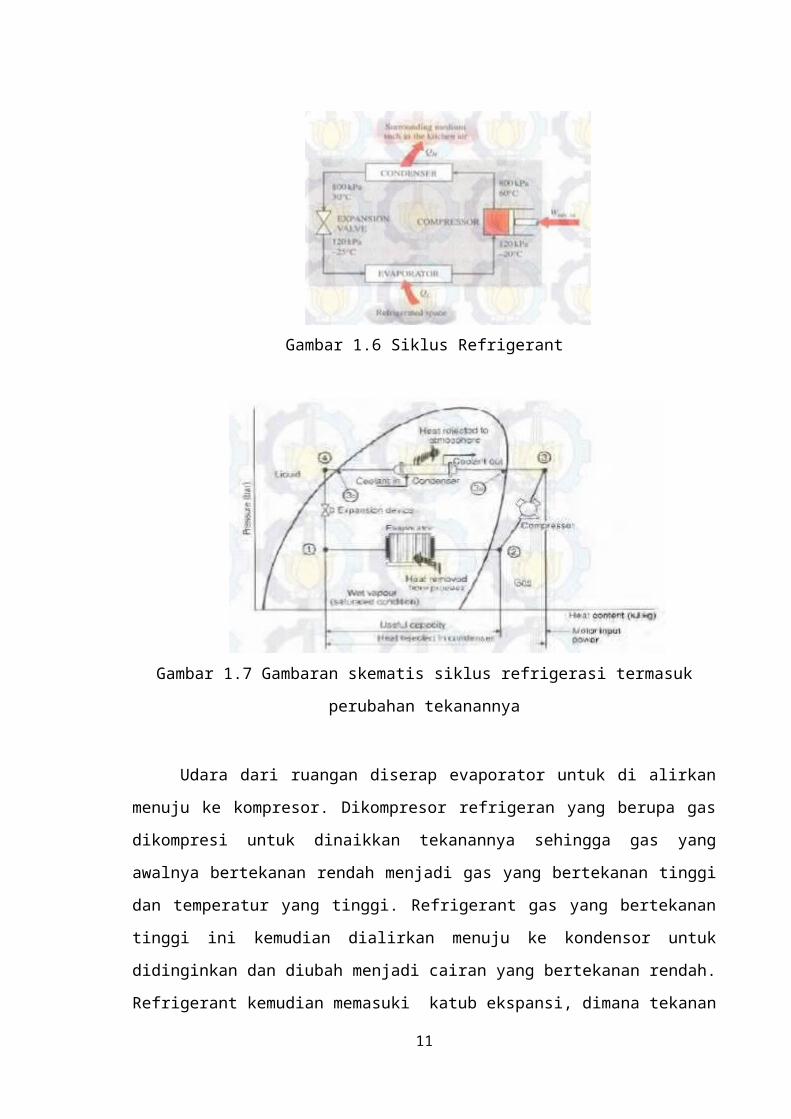
Gambar 1.6 Siklus Refrigerant
Gambar 1.7 Gambaran skematis siklus refrigerasi termasuk
perubahan tekanannya
Udara dari ruangan diserap evaporator untuk di alirkan
menuju ke kompresor. Dikompresor refrigeran yang berupa gas
dikompresi untuk dinaikkan tekanannya sehingga gas yang
awalnya bertekanan rendah menjadi gas yang bertekanan tinggi
dan temperatur yang tinggi. Refrigerant gas yang bertekanan
tinggi ini kemudian dialirkan menuju ke kondensor untuk
didinginkan dan diubah menjadi cairan yang bertekanan rendah.
Refrigerant kemudian memasuki katub ekspansi, dimana tekanan
11
refrigerant turun drastis ke tingkat yang lebih rendah dan
temperatur yang lebih rendah. Refrigerant yang sudah berupa
uap bertekanan rendah dan bertemperatur rendah ini kemudian
memasuki evaporator untuk didistribusikan keruangan yang
dikondisikan.
2.3 Komponen-Komponen Sistem Kontrol Otomatis Pada AC Split
2.3.1. Sensor Suhu LM35
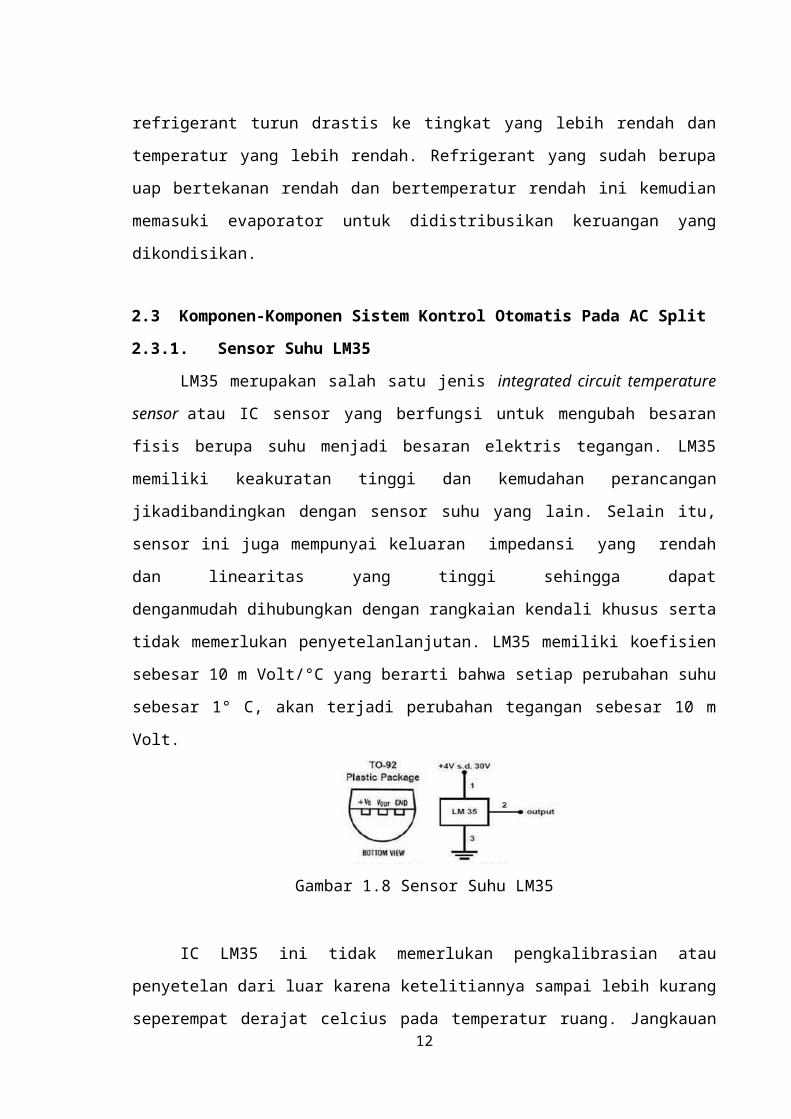
LM35 merupakan salah satu jenis integrated circuit temperature
sensor atau IC sensor yang berfungsi untuk mengubah besaran
fisis berupa suhu menjadi besaran elektris tegangan. LM35
memiliki keakuratan tinggi dan kemudahan perancangan
jikadibandingkan dengan sensor suhu yang lain. Selain itu,
sensor ini juga mempunyai keluaran impedansi yang rendah
dan linearitas yang tinggi sehingga dapat
denganmudah dihubungkan dengan rangkaian kendali khusus serta
tidak memerlukan penyetelanlanjutan. LM35 memiliki koefisien
sebesar 10 m Volt/°C yang berarti bahwa setiap perubahan suhu
sebesar 1° C, akan terjadi perubahan tegangan sebesar 10 m
Volt.
Gambar 1.8 Sensor Suhu LM35
IC LM35 ini tidak memerlukan pengkalibrasian atau
penyetelan dari luar karena ketelitiannya sampai lebih kurang
seperempat derajat celcius pada temperatur ruang. Jangkauan12
(range) sensor mulai dari -55oC sampai dengan 150oC. IC LM35
dapat dialiri arus 60 mA dari supply sehingga panas yang
ditimbulkan sendiri sangat rendah kurang dari 0° C di dalam
suhu ruangan.
2.3.2. Infrared Transceiver
Infrared transceiver adalah sistem yang terdiri atas infrared
transmitter dan receiver transmitter. Sinar infrared atau sinar infra
merah merupakan sinar yang tak nampak. Sinar inframerah
merupakan sinar elektromagnetik dengan panjang gelombang
antara 700 nm sampai dengan 1 mm. Dengan panjang gelombang
ini, sinar inframerah tak akan nampak oleh mata namun radiasi
panas yang dipancarkan masih dapat dirasakan.
Komunikasi infra merah dilakukan dengan menggunakan
dioda infra merah sebagai pemancar dan modul penerima sebagai
penerimanya. Sinyal yang dipancarkan oleh pengirim
(transmitter) dan diterim aoleh penerima (receiver), kemudian
dikodekan sebagai sebuah paket data biner. Proses modulasi
dilakukan dengan mengubah kondisi logika 0 dan 1 menjadi
kondisi ada dan tidak ada sinyal carrier inframerah yang
berkisar antara 30 KHz sempai dengan 40 KHz.
2.3.3. Relay
Relay adalah saklar elektronik yang didasarkan atas
elektrik dan mekanik. Kontrol elektrik diterapkan untuk
mendapatkan gerakan mekanik. Sebagai elektrik adalah
komponen yang dikendalikan oleh arus.
13
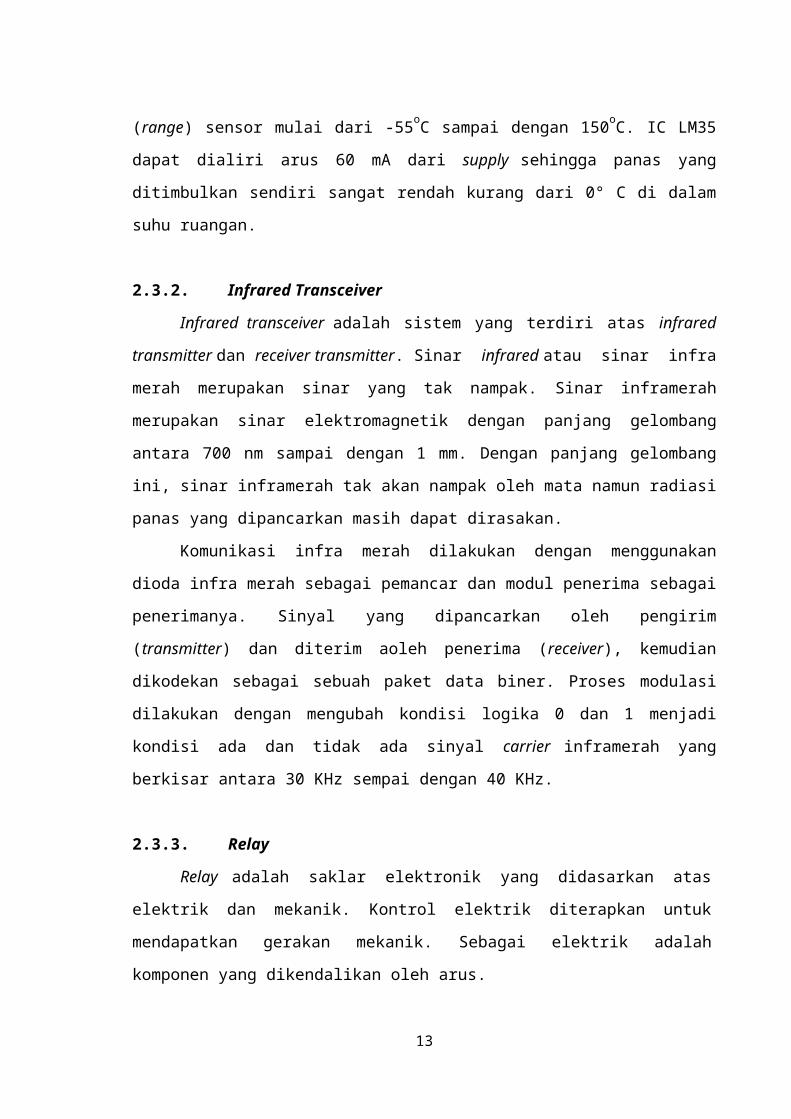
Pada dasarnya, relay terdiri dari lilitan kawat pada
suatu inti besi lunak berubah dari magnet yang menarik atau
menolak suatu pegas sehingga kontak pun menutup atau
membuka. Ada banyak tipe relay yang kontruksinya juga berbeda
tergantung jenis kontaknya.
Gambar 1.9 Simbol Relay
Berdasarkan gambar 1.9 maka ada beberapa jenis relay yang
dibedakan menurut kontaknya.
1. Relay SPST (Single Pole SingleThrough)
Relay dengan satu induk saklar dengan satu saluran kontak
(normally closed).
2. Relay DPST (Double Pole SingleThrough)
Sama seperti SPST tetapi mempunyai dua buah saklar terpisah
yang bekerjanya serentak/bersamaan dan satu saluran kontak
(normally closed) untuk tiap saklar.
3. Relay SPDT (Single Pole Double Through)
Merupakan relay yang mempunyai satu induk saklar untuk
menghubungkan dua saluran kontak (normally closed dan normally
open) yang dihubung bergantian.
4. Relay DPDT (Double Pole Double Through)
Sama seperti SPDT tetapi mempunyai dua buah saklar terpisah
yang bekerja serentak dan dua saluran kontak (normally closed
dan normally open) untuk tiap saklar.
14
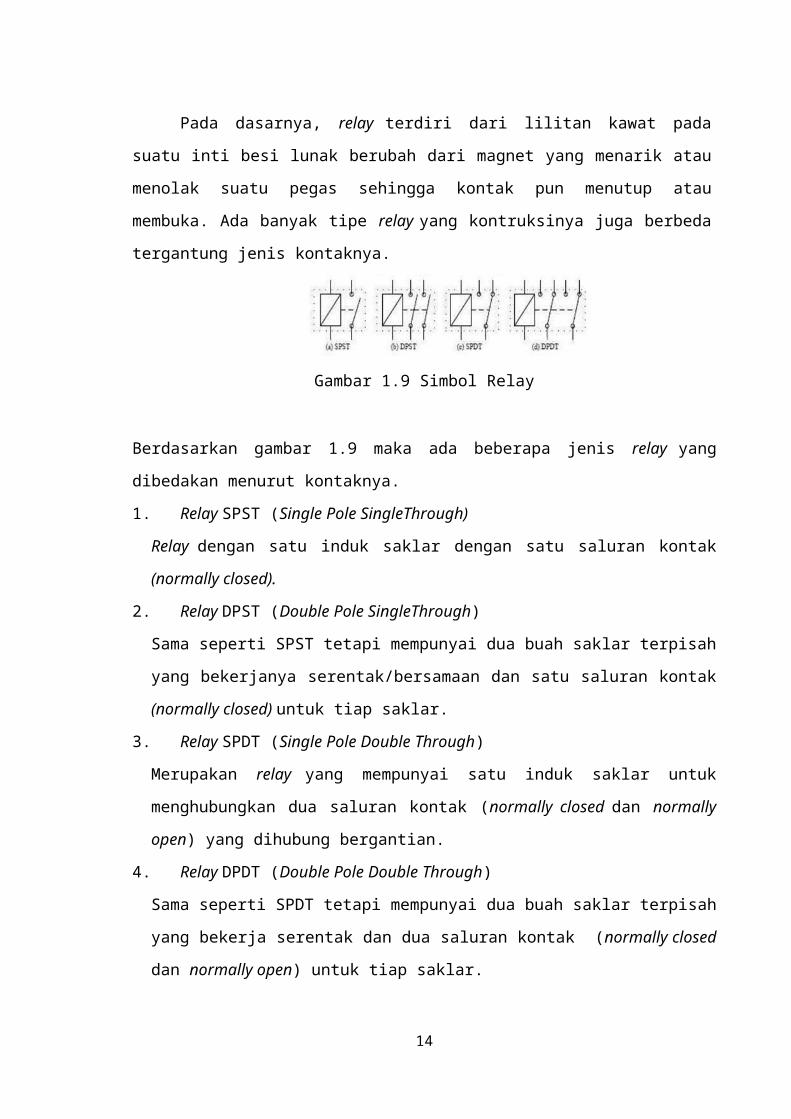
2.3.4. Mikrokontroler AVR ATMega16
ATMega16 berbasis pada arsitektur RISC (Reduced Instruction
Set Computing), di mana satu instruksi dapat dieksekusi
dalam satu clock, dan dapat mencapai 1 MIPS (Million Instruction
Per Second) per MHz. Mikrokontroler ATMega16 memiliki
keistime- waan dibanding jenis mikrokontroler AT89C51,
AT89C52, AT80S51, dan AT89S52 yaitu pada mikrokontroler
ATMega16 memiliki port input ADC 8 channel 10 bit.Mikrokontroler
ATMega16 memiliki 40 pin kaki dengan konfigurasi sebagai
berikut.
Gambar 2.0. Konfigurasi pin mikrokontroler ATMega16
Fitur yang tersedia dalam mikrokontrolerATMega16,
yaitu :
1. Frekuensi clock maksimum 16 MHz.
2. Jalur I/O 32 buah, yang terbagi dalam portA, port B, port
C, dan port D.
3. Analogto Digital Converter (ADC) 10bit sebanyak 8 input.
4. Timer/counter sebanyak 3 buah.
15
5. CPU 8 bit yang terdiri dari 32 register.
6. Watch dog timer dengan osilat orinternal.
7. SRAM internal sebesar 1 Kbyte.
8. Memori flash sebesar 8 Kbyte dengan kemampuan read while
write.
9. Interrupt internal maupun eksternal.
10. Port komunikasi SPI (Serial Pheripheral Interface)
11. EEPROM (Electrically Erasable Program- mable Read Only Memory)
sebesar 512 byte yang dapat deprogram saat operasi.
12. Analog komparator.
13. Komunikasi serial standar USART dengan kecepaatan
maksimal 2,5 Mbp.
2.3.5. LCD (Liquid Crystal Display) M1632
LCD M1632 merupakan modul LCD dengan tampilan 16x2 baris
yang terdiri dari dua bagian. Bagian pertama merupakan
panel LCD sebagai media penampil informasi berbentuk huruf
maupun angka.LCD ini dapat menampung dua baris, dimana
makosing- masing baris dapat menampung 16 karakter. Bagian
kedua merupakan sistem yang dibentuk dengan mikrokontroler,
yang ditempelkan di balik panel LCD. Bagian iniberfungsi
mengatur tampilan informasi serta berfungsi mengatur
komunikasi LCD M1632 dengan mikrokontroler.
Konfigurasi pin LCD M1632 dapat dilihat pada gambar 2.1.
Berikut adalah karakteristik dari LCD M1632 (16x2)16
1. Tampilan 16 karakter 2 baris.
2. ROM pembangkit karakter 192 jenis.
3. RAM pembangkit karakter 8 jenis (di- program pemakai).
4. RAM data tampilan 80 x 8 bit (8 karakter).
5. Duty ratio 1/16.
6. RAM data tampilan dan RAM pembangkit karakter dapat
dibaca dari unit mikro- prosesor.
7. Beberapa fungsi perintah antara lain adalah penghapusan
tampilan (display clear), posisi krusor awal (crusor home),
tampilan karakter kedip (display character blink), penggeseran
krusor (crusor shift) dan penggeseran tampilan (display shift).
8. Rangkaian pembangkit detak (clock).
9. Rangkaian otomatis reset saat daya dinyalakan.
10. Catu daya tunggal +5 volt.
2.4 Prinsip dan Proses Kerja Sistem Kontrol Otomatis Pada AC
Split
Sebelum aktif atau mendapat inputan, rangkaian berada
dalam kondisi standby. Sensor suhu tetap bekerja meski tanpa
inputan berupa password. Hal ini karena sensor suhu LM35 hanya
perlu inputan berupa power supply untuk dapat bekerja.
Sistem otomatisasi AC dikendalikan melalui remote
control.Otomatisasi AC hanya befungsi untuk menghidupkan dan
mematikan AC saja (mengendalikan tombol ON/OFF pada remote
AC). Sistem ON-OF AC (Air Conditioner) ini menggunakan range suhu
17
antara 20° C sampai dengan 28°C. Ketika suhu ruang
terdeteksi oleh sensor suhu lebih dari 28°C, maka
mikrokontroler akan memberikan instruksi kepada remote control
untuk meng-aktifkan AC. Sebaliknya, ketika suhu ruang kurang
dari 20° C, maka mikrokontroler akan memberikan instruksi
kepada remote control untuk menonaktifkan AC.
Hasil pembacaan suhu ruang oleh sensor suhu kemudian
ditampilkan di LCD 16x2 (M1632) danweb. Oleh karena itu,
melalui web, suhu dapat dimonitoring secara online. Selain
menampilkan suhu ruang pada saat itu, AC juga dapat
dikendalikan melalui web (ON/OFF melalui web).
18
BAB III
KESIMPULAN
3.1 Hasil Analisa Sistem Kontrol Otomatis Pada AC Split
Pengujian dari makalah ini dilakukan dengan objek
manusia sebagai masukan sensor dan lampu pijar 23 W/220 Vac
sebagai plant pengganti mesin AC (Air Conditioner). Pengujian
dilakukan pada : jarak jangkauan sensor, Lamanya Objek berada
dalam ruangan, Motor stepper untuk half step dan full step.
Berikut adalah hasil pengujiannya.
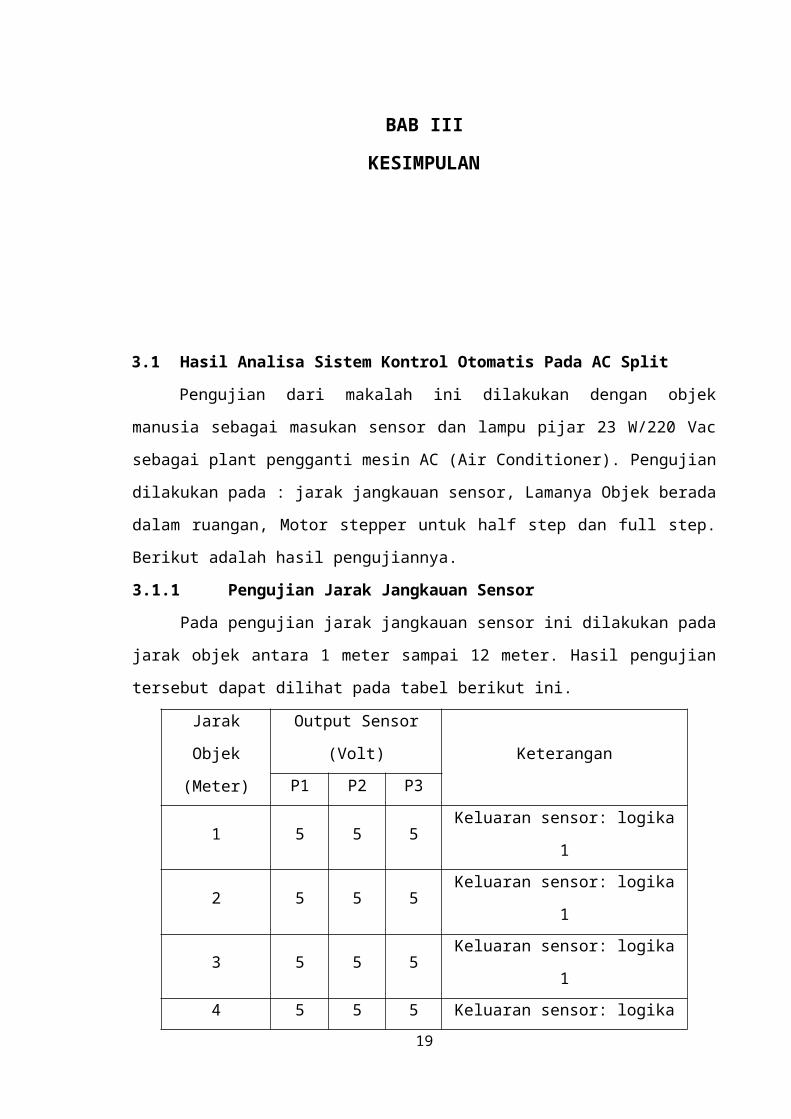
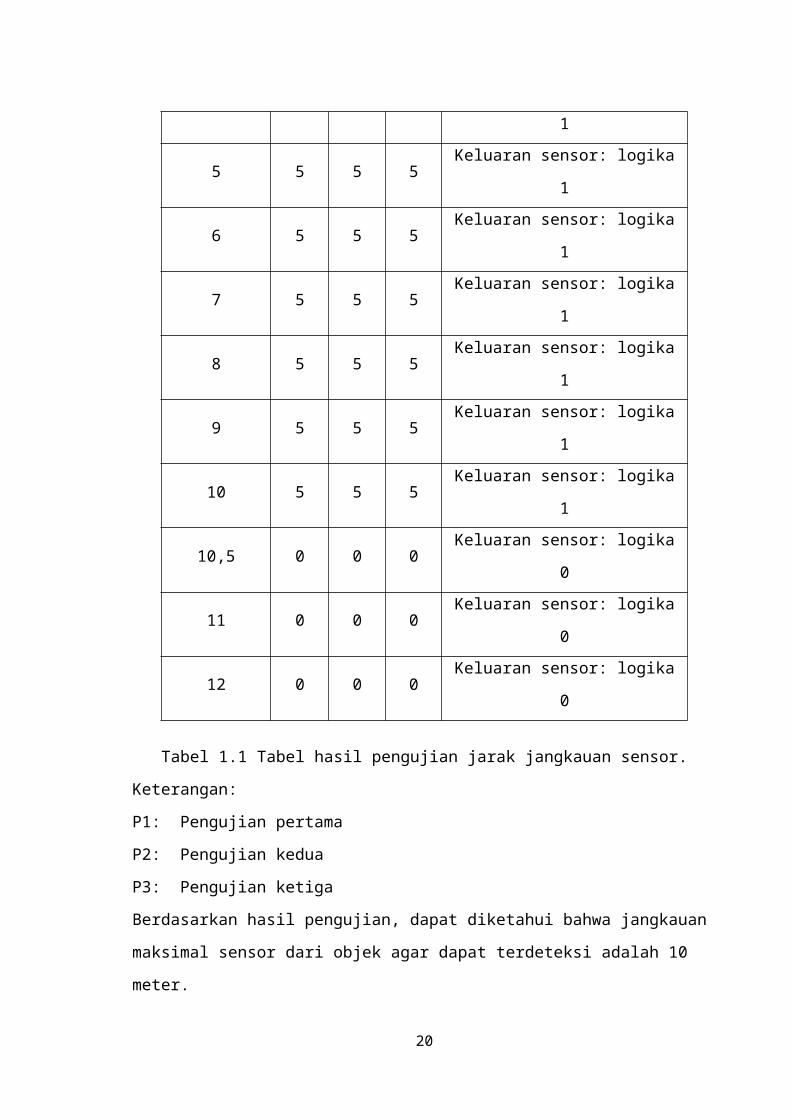
3.1.1 Pengujian Jarak Jangkauan Sensor
Pada pengujian jarak jangkauan sensor ini dilakukan pada
jarak objek antara 1 meter sampai 12 meter. Hasil pengujian
tersebut dapat dilihat pada tabel berikut ini.
Jarak
Objek
(Meter)
Output Sensor
(Volt) KeteranganP1 P2 P3
1 5 5 5Keluaran sensor: logika
1
2 5 5 5Keluaran sensor: logika
1
3 5 5 5Keluaran sensor: logika
14 5 5 5 Keluaran sensor: logika
19
1
5 5 5 5Keluaran sensor: logika
1
6 5 5 5Keluaran sensor: logika
1
7 5 5 5Keluaran sensor: logika
1
8 5 5 5Keluaran sensor: logika
1
9 5 5 5Keluaran sensor: logika
1
10 5 5 5Keluaran sensor: logika
1
10,5 0 0 0Keluaran sensor: logika
0
11 0 0 0Keluaran sensor: logika
0
12 0 0 0Keluaran sensor: logika
0
Tabel 1.1 Tabel hasil pengujian jarak jangkauan sensor.
Keterangan:
P1: Pengujian pertama
P2: Pengujian kedua
P3: Pengujian ketiga
Berdasarkan hasil pengujian, dapat diketahui bahwa jangkauan
maksimal sensor dari objek agar dapat terdeteksi adalah 10
meter.
20
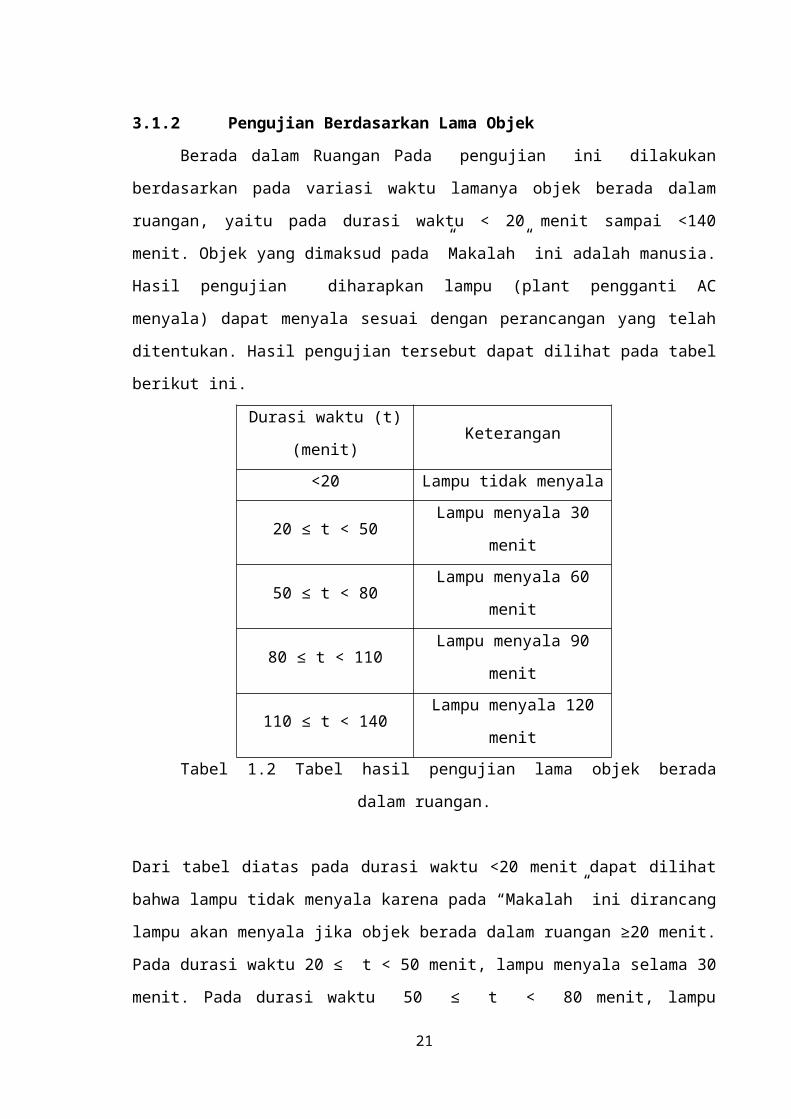
3.1.2 Pengujian Berdasarkan Lama Objek
Berada dalam Ruangan Pada pengujian ini dilakukan
berdasarkan pada variasi waktu lamanya objek berada dalam
ruangan, yaitu pada durasi waktu < 20 menit sampai <140
menit. Objek yang dimaksud pada ”Makalah” ini adalah manusia.
Hasil pengujian diharapkan lampu (plant pengganti AC
menyala) dapat menyala sesuai dengan perancangan yang telah
ditentukan. Hasil pengujian tersebut dapat dilihat pada tabel
berikut ini.
Durasi waktu (t)
(menit)Keterangan
<20 Lampu tidak menyala
20 ≤ t < 50Lampu menyala 30
menit
50 ≤ t < 80Lampu menyala 60
menit
80 ≤ t < 110Lampu menyala 90
menit
110 ≤ t < 140Lampu menyala 120
menitTabel 1.2 Tabel hasil pengujian lama objek berada
dalam ruangan.
Dari tabel diatas pada durasi waktu <20 menit dapat dilihat
bahwa lampu tidak menyala karena pada “Makalah” ini dirancang
lampu akan menyala jika objek berada dalam ruangan ≥20 menit.
Pada durasi waktu 20 ≤ t < 50 menit, lampu menyala selama 30
menit. Pada durasi waktu 50 ≤ t < 80 menit, lampu
21
menyala selama 60 menit. Pada durasi waktu 80 ≤ t < 110
menit, lampu menyala selama 90 menit. Pada durasi waktu 110 ≤
t < 140 menit, lampu menyala selama 120 menit. Dari pengujian
diatas telah diperoleh hasil yang sesuai dengan perancangan
yang telah dibuat yaitu mesin AC menyala sesuai dengan
penggunaan yang diinginkan.
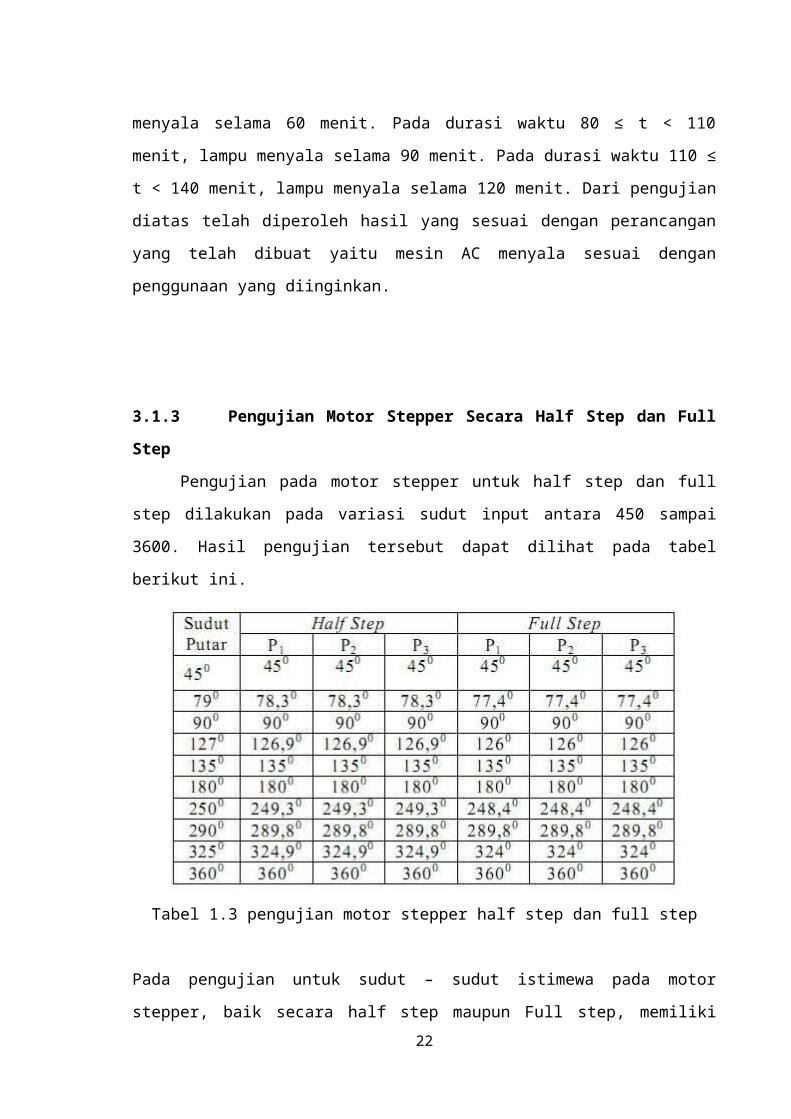
3.1.3 Pengujian Motor Stepper Secara Half Step dan Full
Step
Pengujian pada motor stepper untuk half step dan full
step dilakukan pada variasi sudut input antara 450 sampai
3600. Hasil pengujian tersebut dapat dilihat pada tabel
berikut ini.
Tabel 1.3 pengujian motor stepper half step dan full step
Pada pengujian untuk sudut – sudut istimewa pada motor
stepper, baik secara half step maupun Full step, memiliki22
sudut hitung yang sama, tapi untuk sudut-sudut tertentu
perputaran motor stepper secara half step memiliki sudut
hitung yang lebih presisi daripada Full step, yaitu hasil
pada half step lebih mendekati referensi yang diinginkan.
Adanya perbedaan antara sudut hitung dengan referensi sudut
input yang diberikan antara half step dan full step
dikarenakan sudut putar tiap step yang berbeda, yaitu
0,90/step untuk half step dan 1,80/step untuk full step.
3.2. Kesimpulan dan Saran
3.2.1 Kesimpulan
Berdasarkan perancangan, pengujian dan analisis yang
telah dilakukan, maka dapat disimpulkan hal-hal sebagai
berikut:
1. Sensor PIR325 yang dilengkapi dengan fresnel lens dan
pelindung mempunyai jangkauan maksimal pendeteksian
perubahan panas dalam hal ini yang berasal dari
radiasi panas tubuh manusia sejauh 10 meter.
2. Penyensoran dengan cara pemindaian (scanning) dapat
mendeteksi keberadaan orang di dalam ruangan walaupun
orang tersebut tidak bergerak, karena sensor yang
bergerak akan menangkap panas tubuh manusia melalui 2
elemen sensor dari PIR325 yang melewatinya.
3. Pada pengujian berdasarkan lama objek berada dalam
ruangan telah diperoleh hasil yang sesuai dengan
perancangan pada sistem, yaitu lampu akan menyala
jika objek berada dalam ruangan ≥ 20 menit dan Pada
durasi waktu 20 ≤ t < 50 menit, lampu menyala selama
23
30 menit; Pada durasi waktu 50 ≤ t < 80 menit,
lampu menyala selama 60 menit; Pada durasi waktu 80 ≤
t < 110 menit, lampu menyala selama 90 menit; Pada
durasi waktu 110 ≤ t < 140 menit, lampu menyala
selama 120 menit;
4. Pada pengujian motor stepper secara half step dan
full step, besarnya sudut hitung untuk sudut-sudut
istimewa antara half step dan full step memiliki
nilai yang sama, tetapi untuk sudut-sudut tertentu
half step memiliki sudut hitung yang lebih presisi.
Hal ini disebabkan karena besarnya sudut putar tiap
step yang beda, yaitu 0,90/step untuk half step dan
1,80/step untuk full step.
3.2.2. Saran
Beberapa hal yang dapat disarankan dari pelaksaan tugas
akhir ini adalah:
1. Sistem yang sudah dibuat masih dapat dikembangkan
dan disempurnakan lagi, misalnya pada bagian sensor
agar dapat mempunyai jangkauan deteksi yang lebih jauh
lagi.
2. Makalah ini agar dapat diimplementasikan pada
ruangan-ruangan yang mempunyai mesin AC (Air
Conditioner) sehingga dapat membantu dalam usaha
penghematan energi.
24