fusion of flir automatic target recognition algorithms
TRANSCRIPT
Information Fusion 4 (2003) 247–258
www.elsevier.com/locate/inffus
Fusion of FLIR automatic target recognition algorithms
Syed A. Rizvi a,*, Nasser M. Nasrabadi b
a Department of Engineering Science and Physics, College of Staten Island, City University of New York,
2800 Victory Blvd., Staten Island, NY 10314, USAb US Army Research Laboratory, ATTN: AMSRL-SE-SE, 2800 Powder Mill Road, Adelphi, MD 20783, USA
Received 15 November 2001; received in revised form 17 December 2002; accepted 4 April 2003
Abstract
In this paper, we investigate several fusion techniques for designing a composite classifier to improve the performance (prob-
ability of correct classification) of forward-looking infrared (FLIR) automatic target recognition (ATR). The motivation behind the
fusion of ATR algorithms is that if each contributing technique in a fusion algorithm (composite classifier) emphasizes on learning
at least some features of the targets that are not learned by other contributing techniques for making a classification decision, a
fusion of ATR algorithms may improve overall probability of correct classification of the composite classifier. In this research, we
propose to use four ATR algorithms for fusion. The individual performance of the four contributing algorithms ranges from 73.5%
to about 77% of probability of correct classification on the testing set. The set of correctly classified targets by each contributing
algorithm usually has a substantial overlap with the set of correctly identified targets by other algorithms (over 50% for the four
algorithms being used in this research). There is also a significant part of the set of correctly identified targets that is not shared by all
contributing algorithms. The size of this subset of correctly identified targets generally determines the extent of the potential im-
provement that may result from the fusion of the ATR algorithms. In this research, we propose to use Bayes classifier, committee of
experts, stacked-generalization, winner-takes-all, and ranking-based fusion techniques for designing the composite classifiers. The
experimental results show an improvement of more than 6.5% over the best individual performance.
Published by Elsevier B.V.
1. Introduction
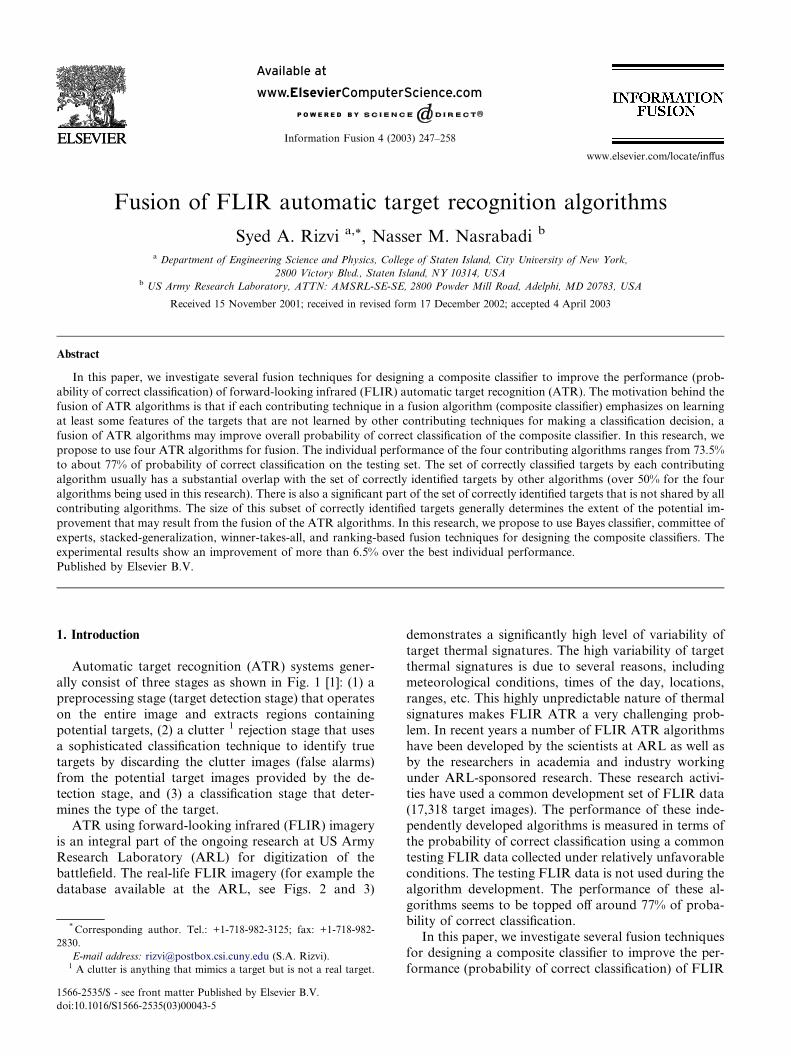
Automatic target recognition (ATR) systems gener-
ally consist of three stages as shown in Fig. 1 [1]: (1) a
preprocessing stage (target detection stage) that operates
on the entire image and extracts regions containing
potential targets, (2) a clutter 1 rejection stage that uses
a sophisticated classification technique to identify true
targets by discarding the clutter images (false alarms)
from the potential target images provided by the de-tection stage, and (3) a classification stage that deter-
mines the type of the target.
ATR using forward-looking infrared (FLIR) imagery
is an integral part of the ongoing research at US Army
Research Laboratory (ARL) for digitization of the
battlefield. The real-life FLIR imagery (for example the
database available at the ARL, see Figs. 2 and 3)
*Corresponding author. Tel.: +1-718-982-3125; fax: +1-718-982-
2830.
E-mail address: [email protected] (S.A. Rizvi).1 A clutter is anything that mimics a target but is not a real target.
1566-2535/$ - see front matter Published by Elsevier B.V.
doi:10.1016/S1566-2535(03)00043-5
demonstrates a significantly high level of variability of
target thermal signatures. The high variability of targetthermal signatures is due to several reasons, including
meteorological conditions, times of the day, locations,
ranges, etc. This highly unpredictable nature of thermal
signatures makes FLIR ATR a very challenging prob-
lem. In recent years a number of FLIR ATR algorithms
have been developed by the scientists at ARL as well as
by the researchers in academia and industry working
under ARL-sponsored research. These research activi-ties have used a common development set of FLIR data
(17,318 target images). The performance of these inde-
pendently developed algorithms is measured in terms of
the probability of correct classification using a common
testing FLIR data collected under relatively unfavorable
conditions. The testing FLIR data is not used during the
algorithm development. The performance of these al-
gorithms seems to be topped off around 77% of proba-bility of correct classification.
In this paper, we investigate several fusion techniques
for designing a composite classifier to improve the per-
formance (probability of correct classification) of FLIR
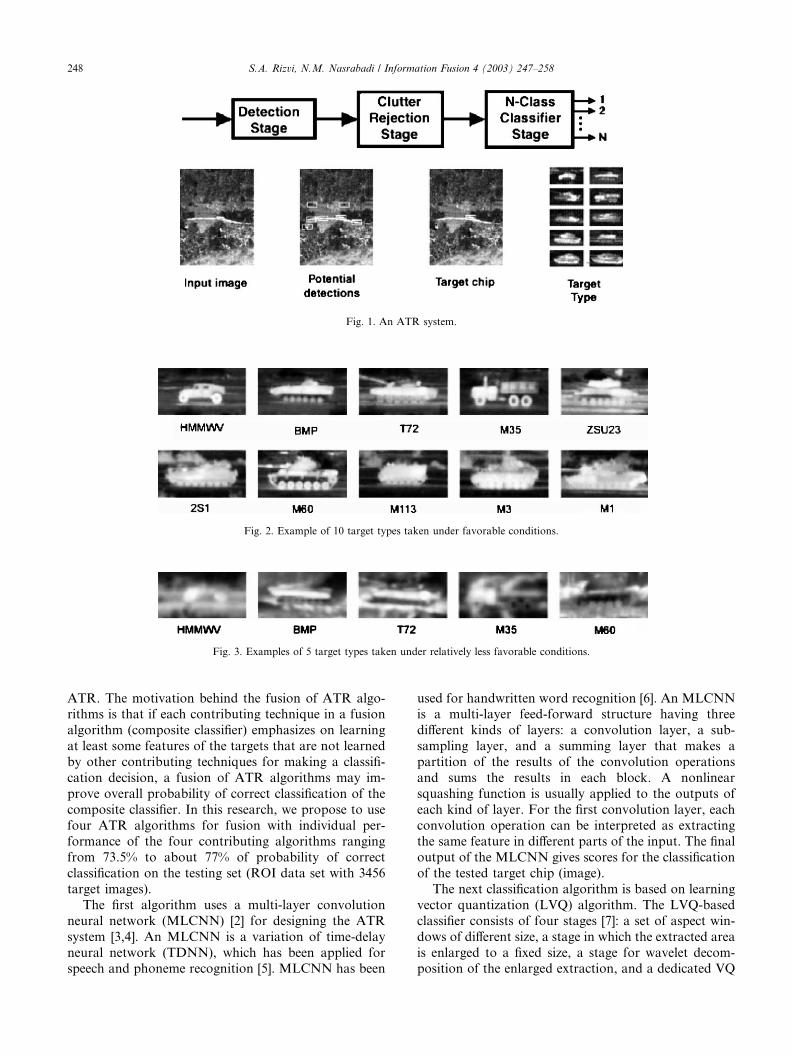
Fig. 1. An ATR system.
Fig. 2. Example of 10 target types taken under favorable conditions.
Fig. 3. Examples of 5 target types taken under relatively less favorable conditions.
248 S.A. Rizvi, N.M. Nasrabadi / Information Fusion 4 (2003) 247–258
ATR. The motivation behind the fusion of ATR algo-rithms is that if each contributing technique in a fusion
algorithm (composite classifier) emphasizes on learning
at least some features of the targets that are not learned
by other contributing techniques for making a classifi-
cation decision, a fusion of ATR algorithms may im-
prove overall probability of correct classification of the
composite classifier. In this research, we propose to use
four ATR algorithms for fusion with individual per-formance of the four contributing algorithms ranging
from 73.5% to about 77% of probability of correct
classification on the testing set (ROI data set with 3456
target images).
The first algorithm uses a multi-layer convolution
neural network (MLCNN) [2] for designing the ATR
system [3,4]. An MLCNN is a variation of time-delay
neural network (TDNN), which has been applied forspeech and phoneme recognition [5]. MLCNN has been
used for handwritten word recognition [6]. An MLCNNis a multi-layer feed-forward structure having three
different kinds of layers: a convolution layer, a sub-
sampling layer, and a summing layer that makes a
partition of the results of the convolution operations
and sums the results in each block. A nonlinear
squashing function is usually applied to the outputs of
each kind of layer. For the first convolution layer, each
convolution operation can be interpreted as extractingthe same feature in different parts of the input. The final
output of the MLCNN gives scores for the classification
of the tested target chip (image).
The next classification algorithm is based on learning
vector quantization (LVQ) algorithm. The LVQ-based
classifier consists of four stages [7]: a set of aspect win-
dows of different size, a stage in which the extracted area
is enlarged to a fixed size, a stage for wavelet decom-position of the enlarged extraction, and a dedicated VQ

S.A. Rizvi, N.M. Nasrabadi / Information Fusion 4 (2003) 247–258 249
for each subband within each aspect window. In the firststage, each aspect window is a background-clipping
rectangle whose size is determined by the type of target
and the range of aspects that it operates on. After the
background removal in the first stage, each extracted
target area is enlarged in the second stage into a fixed
dimension that is common to all the aspect windows. In
the third stage, the enlarged extraction is decomposed
into four subbands based on a wavelet decompositionprocess. After the wavelet decomposition, the final stage
uses a set of VQ codebooks for feature matching and
target recognition. In this stage, the target recognition
problem is treated as a template-matching task through
a similarity metric-based approach. A set of subband
templates or code vectors is constructed for each sub-
band of a particular target at a specific range of aspects.
Each set of code vectors forms a codebook, representingthe target signatures for a given subband of a particular
target at a specific range of aspects.
The third classification algorithm used in the fusion is
based on modular neural network (MNN) [8] approach
in which the classification of targets is realized hierar-
chically [9]. The local structure of a target image is
captured by extraction of the directional variance fea-
tures at different resolutions in small image blocks. Theseimage blocks are organized, by location, into several
larger image regions, called receptive fields. An individ-
ual neural network (expert network) in the modular
network is designed to classify targets using only the
local features in a single receptive field. At the final level,
the classification results of the expert networks for the
individual receptive fields are further combined to pro-
duce the final classification decision.The fourth technique uses expansion matching
(EXM) filtering and Karhunen–Loeve transform (KLT)
for feature extraction [10,11]. The extracted features
(feature vectors) are then used to train supporting vector
machines (SVM), which finally identify the class of the
input target image. In this research, we propose to use
averaged Bayes classifier, committee of experts, stacked-
generalization, winner-takes-all, and ranking-based fu-sion techniques for designing the composite classifiers.
The experimental results show an improvement of more
than 6.5% over the best individual performance.
This paper is organized as follows. Section 2 presents
several fusion techniques proposed in this paper. Section
3 presents the experimental results and Section 4 con-
cludes the paper discussing the future research direc-
tions.
2. Composite classifiers
Several approaches have been used in the previousresearch for improving generalization performance of
a classification system. For example, the boosting
and committee-of-experts techniques have been usedsuccessfully in character recognition applications for
improving generalization performance [12]. These ap-
proaches generally require that a number of experts be
trained on subsets of the training data, where these
subsets could be disjoint as well as overlapping. These
approaches may be grouped into two basic approaches:
classifier fusion and classifier selection [13,14]. In a
classifier fusion algorithm, all classifiers are executedand a mixing algorithm combines all the outputs from
all the classifiers. Since all the classifiers contribute their
outputs to a mixing algorithm, the computational
complexity is no less than the sum of the computational
complexities of all the classifiers. In a classifier selection
algorithm, a separate selection component chooses the
appropriate classifier to classify each particular target
image. The computational complexity of this approachis much lower than that of the classifier fusion al-
gorithms, since not all the classifiers participate in
classifying a target image. The performance of the
classification selection algorithm depends on the accu-
racy of the selection component. However, the design of
selection component with a sufficiently high level of
accuracy is not trivial. Therefore, when compared to the
classification selection algorithms with non-optimal se-lection component, the classifier fusion algorithms tend
to have better performance. In this research we focus on
classifier fusion techniques.
The idea behind the integration of several classifiers is
to have individual classifiers learn particular subspaces
of data and to choose these subspaces so that they have
a minimum overlap, which allows performance im-
provement to be achieved by combining the classifiers.Approaches that one could take include: mixture of
experts, different features, and different learning algo-
rithms. In a mixture of experts algorithm [15], the ex-
perts are specialized by learning different subspaces of
data, and the final decision is obtained by combining the
outputs of the experts in a linear manner. An integrating
unit, called a gating network, is used to provide the
weightings for the combination of the experts and/or toselect an appropriate expert for classifying an input
datum. In the second approach, various data transfor-
mations create different representations of data (differ-
ent features). These representations can then be used to
train separate classifiers. While the transformations do
not add any information, they do affect the information
captured by the learning algorithm, making some in-
formation more readily learnable and concealing someinformation from the learning algorithm. This means
that algorithms trained using different transformations
will not be perfectly correlated, and can potentially be
combined to boost performance. For example, data with
different time/frequency resolutions, created by a wave-
let transform, are used to design stage neural networks
in a parallel consensual neural network [16]. The third
250 S.A. Rizvi, N.M. Nasrabadi / Information Fusion 4 (2003) 247–258
approach is to design several classifiers with differentlearning algorithms and combine them with a mixing
strategy. In this approach each component classifier
naturally creates different learning subspaces. The third
approach is discussed in this section to design and
combine the several classifiers.
Let us define the notation that is used in this section.
Suppose that we have a set of K classifiers, Ck, each of
which classifies targets into one of Q distinct classes,where k ¼ 1; 2; . . . ;K. The output vector of classifier Ck,
given a target X, is represented by a column vector
yk ¼ fyk;q; q ¼ 1; 2; . . . :;Qg; ð1Þwhere qth component of the output vector, yk;q, repre-sents the estimated posteriori probability that target X
belongs to the class q, estimated by classifier Ck. We can
then express the estimated posteriori probability as thedesired posteriori probability pðqjXÞ plus an error
ek;qðXÞ:yk;q ¼ pðqjXÞ þ ek;qðXÞ: ð2ÞFor notational convenience, we do not explicitly express
the dependence of outputs yk;q upon variable X, where X
is the input of each individual classifier Ck. The groundtruth class of a target X is hT. The output vector of a
composite classifier, Ck, given a target X, is represented
by a column vector
yðXÞ ¼ fyqðXÞ; q ¼ 1; 2; . . . ;Qg; ð3Þwhere yqðXÞ, the qth component of the output vector, is
the estimated posteriori probability that target X be-
longs to the class q. The classification decision of clas-sifier Ck is
hk ¼ argmax16 q6Qyk;q: ð4Þ
The final decision of a composite classifier C is
h ¼ argmax16 q6Qyq: ð5Þ
The first step in the design of the composite classifier
is to express the outputs of the different classifiers in
terms of the probability of correct classification. In one
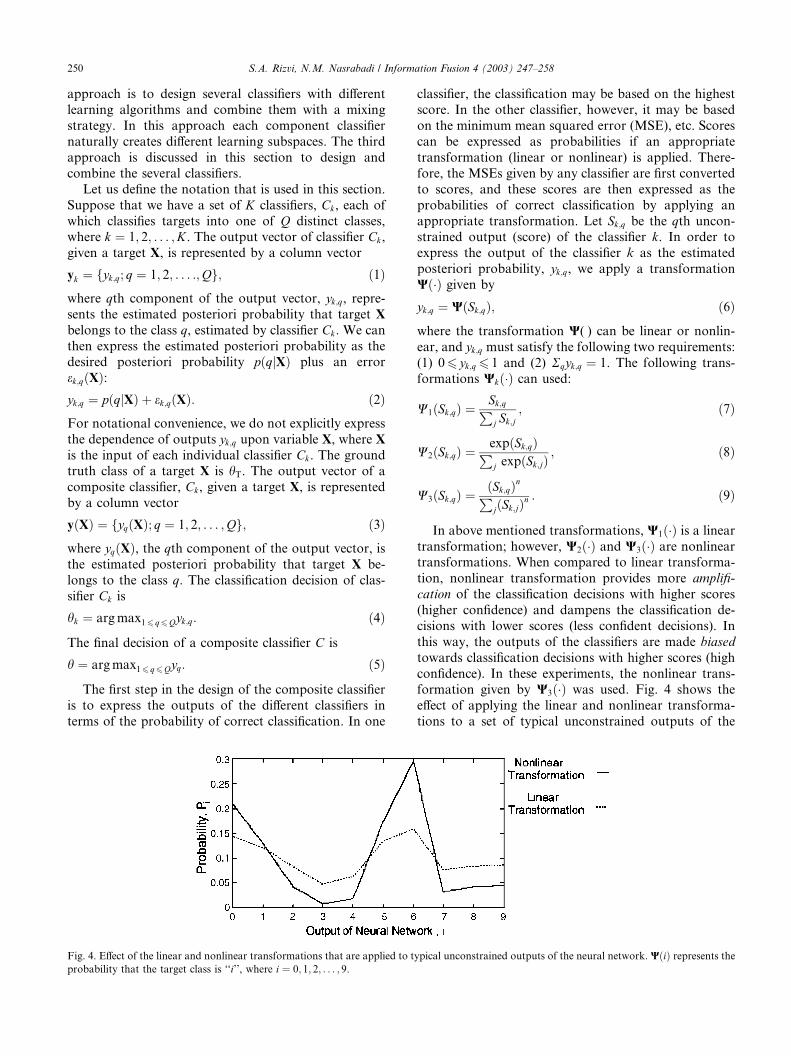
Fig. 4. Effect of the linear and nonlinear transformations that are applied to t
probability that the target class is ‘‘i’’, where i ¼ 0; 1; 2; . . . ; 9.
classifier, the classification may be based on the highestscore. In the other classifier, however, it may be based
on the minimum mean squared error (MSE), etc. Scores
can be expressed as probabilities if an appropriate
transformation (linear or nonlinear) is applied. There-
fore, the MSEs given by any classifier are first converted
to scores, and these scores are then expressed as the
probabilities of correct classification by applying an
appropriate transformation. Let Sk;q be the qth uncon-strained output (score) of the classifier k. In order to
express the output of the classifier k as the estimated
posteriori probability, yk;q, we apply a transformation
Wð�Þ given by
yk;q ¼ WðSk;qÞ; ð6Þ
where the transformation W(Æ) can be linear or nonlin-
ear, and yk;q must satisfy the following two requirements:
(1) 06 yk;q 6 1 and (2) Rqyk;q ¼ 1. The following trans-
formations Wkð�Þ can used:
W1ðSk;qÞ ¼Sk;qPj Sk;j
; ð7Þ
W2ðSk;qÞ ¼expðSk;qÞPj expðSk;jÞ
; ð8Þ
W3ðSk;qÞ ¼ðSk;qÞnPjðSk;jÞ
n : ð9Þ
In above mentioned transformations, W1ð�Þ is a linear
transformation; however, W2ð�Þ and W3ð�Þ are nonlineartransformations. When compared to linear transforma-
tion, nonlinear transformation provides more amplifi-
cation of the classification decisions with higher scores
(higher confidence) and dampens the classification de-
cisions with lower scores (less confident decisions). In
this way, the outputs of the classifiers are made biased
towards classification decisions with higher scores (high
confidence). In these experiments, the nonlinear trans-formation given by W3ð�Þ was used. Fig. 4 shows the
effect of applying the linear and nonlinear transforma-
tions to a set of typical unconstrained outputs of the
ypical unconstrained outputs of the neural network. WðiÞ represents the
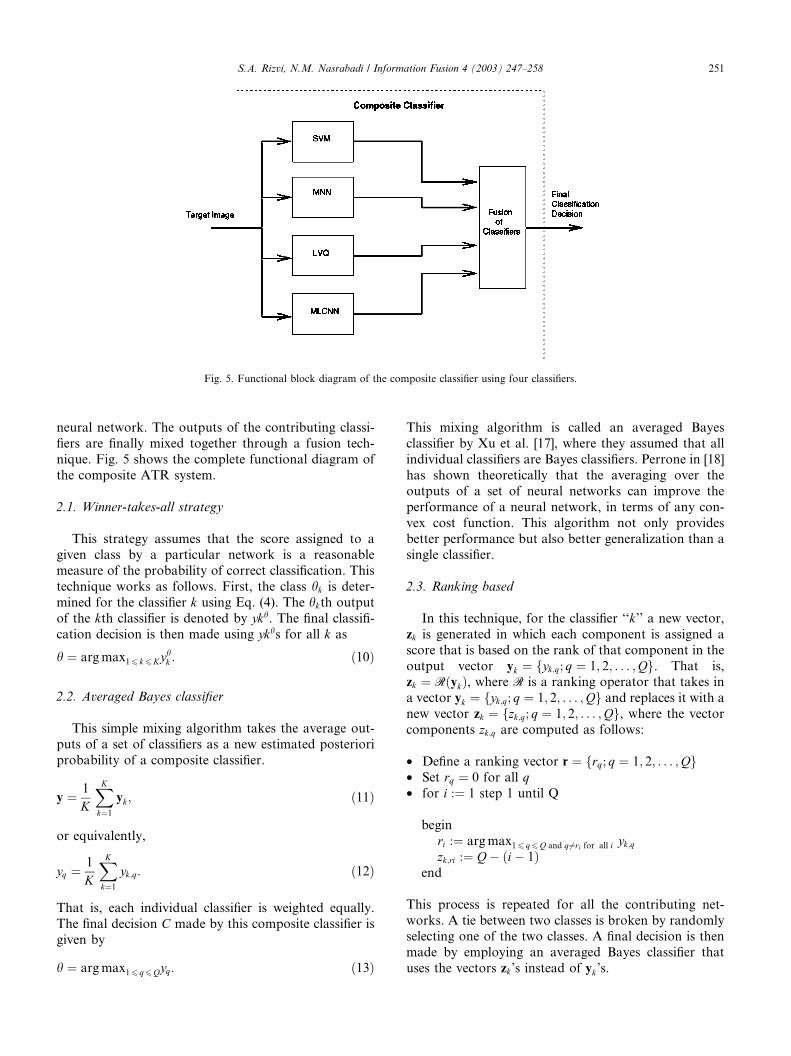
Fig. 5. Functional block diagram of the composite classifier using four classifiers.
S.A. Rizvi, N.M. Nasrabadi / Information Fusion 4 (2003) 247–258 251
neural network. The outputs of the contributing classi-
fiers are finally mixed together through a fusion tech-
nique. Fig. 5 shows the complete functional diagram of
the composite ATR system.
2.1. Winner-takes-all strategy
This strategy assumes that the score assigned to agiven class by a particular network is a reasonable
measure of the probability of correct classification. This
technique works as follows. First, the class hk is deter-
mined for the classifier k using Eq. (4). The hkth output
of the kth classifier is denoted by ykh. The final classifi-
cation decision is then made using ykhs for all k as
h ¼ argmax16 k6Kyhk : ð10Þ
2.2. Averaged Bayes classifier
This simple mixing algorithm takes the average out-
puts of a set of classifiers as a new estimated posteriori
probability of a composite classifier.
y ¼ 1
K
XK
k¼1
yk; ð11Þ
or equivalently,
yq ¼1
K
XK
k¼1
yk;q: ð12Þ
That is, each individual classifier is weighted equally.
The final decision C made by this composite classifier is
given by
h ¼ argmax y : ð13Þ
16 q6Q qThis mixing algorithm is called an averaged Bayes
classifier by Xu et al. [17], where they assumed that all
individual classifiers are Bayes classifiers. Perrone in [18]
has shown theoretically that the averaging over the
outputs of a set of neural networks can improve the
performance of a neural network, in terms of any con-
vex cost function. This algorithm not only provides
better performance but also better generalization than asingle classifier.
2.3. Ranking based
In this technique, for the classifier ‘‘k’’ a new vector,
zk is generated in which each component is assigned a
score that is based on the rank of that component in the
output vector yk ¼ fyk;q; q ¼ 1; 2; . . . ;Qg. That is,zk ¼ RðykÞ, where R is a ranking operator that takes in
a vector yk ¼ fyk;q; q ¼ 1; 2; . . . ;Qg and replaces it with a
new vector zk ¼ fzk;q; q ¼ 1; 2; . . . ;Qg, where the vector
components zk;q are computed as follows:
• Define a ranking vector r ¼ frq; q ¼ 1; 2; . . . ;Qg• Set rq ¼ 0 for all q• for i :¼ 1 step 1 until Q
begin
ri :¼ argmax16 q6Q and q6¼ri for all i yk;qzk;ri :¼ Q� ði� 1Þ
end
This process is repeated for all the contributing net-
works. A tie between two classes is broken by randomlyselecting one of the two classes. A final decision is then
made by employing an averaged Bayes classifier that
uses the vectors zk’s instead of yk’s.
Table 1
Input vector and the corresponding transformed vector obtained after
applying the ranking operator for classifier C1
Class (q) y1;q z1;q
1 0.15 2
2 0.25 4
3 0.30 5
4 0.10 1
5 0.20 3
Table 2
Input vector and the corresponding transformed vector obtained after
applying the ranking operator for classifier C2
Class (q) y1;q z1;q
1 0.35 5
2 0.22 4
3 0.10 1
4 0.19 3
5 0.14 2
2 SIG and ROI are arbitrarily chosen names for the training and
testing databases used at ARL.
252 S.A. Rizvi, N.M. Nasrabadi / Information Fusion 4 (2003) 247–258
In essence, the ranking-based technique provides the
classification decision that is biased towards the class
having relatively high rank (not necessarily the highest
rank) in most classifiers. Note that the classification
decision made by the ranking-based technique may or
may not be the same as the classification decision ob-
tained by employing an averaged Bayes classifier on the
original outputs of the classifiers. As an example con-sider a simple case of two classifiers with five classes. Let
us assume that the output vectors y1 ¼ ½0:15; 0:25;0:3; 0:1; 0:2� and y2 ¼ ½0:35; 0:22; 0:1; 0:19; 0:14� repre-
sents the output of the classifier C1 and C2, respectively.
The classification decision based on averaged Bayes
classifier would be class 1. Table 1 shows the vector y1and the corresponding vector z1 obtained after applying
the ranking operator. Similarly, Table 2 shows the vec-tor y2 and the corresponding vector z2 obtained after
applying the ranking operator. The classification deci-
sion given by the ranking-based classifier is class 2,
which is strongly favored by both classifiers; however,
none of the classifiers would pick class 2 as the final
class.
2.4. Stacked generalization method
The averaged Bayes classifier algorithm treats eachindividual classifier equally. However, it is possible that
some classifiers can make better decisions than others
for some targets. Thus, we can reduce the probability of
misclassification if we assign larger weightings to some
classifiers than to other classifiers for some targets. Two
approaches that provide linear weighting to individual
classifiers are explored in [16,18]. The first approach,
called generalized committee [18], obtains the weightingof each component classifier by solving the error cor-
relation matrix. The second approach, similar to the
generalized committee, is supported by consensus theory[16]. The optimal weighting is obtained by solving the
Weiner–Hopf equation. Better performance can be ex-
pected if nonlinear weighting is applied to individual
classifiers, since a linear function is a special case of a
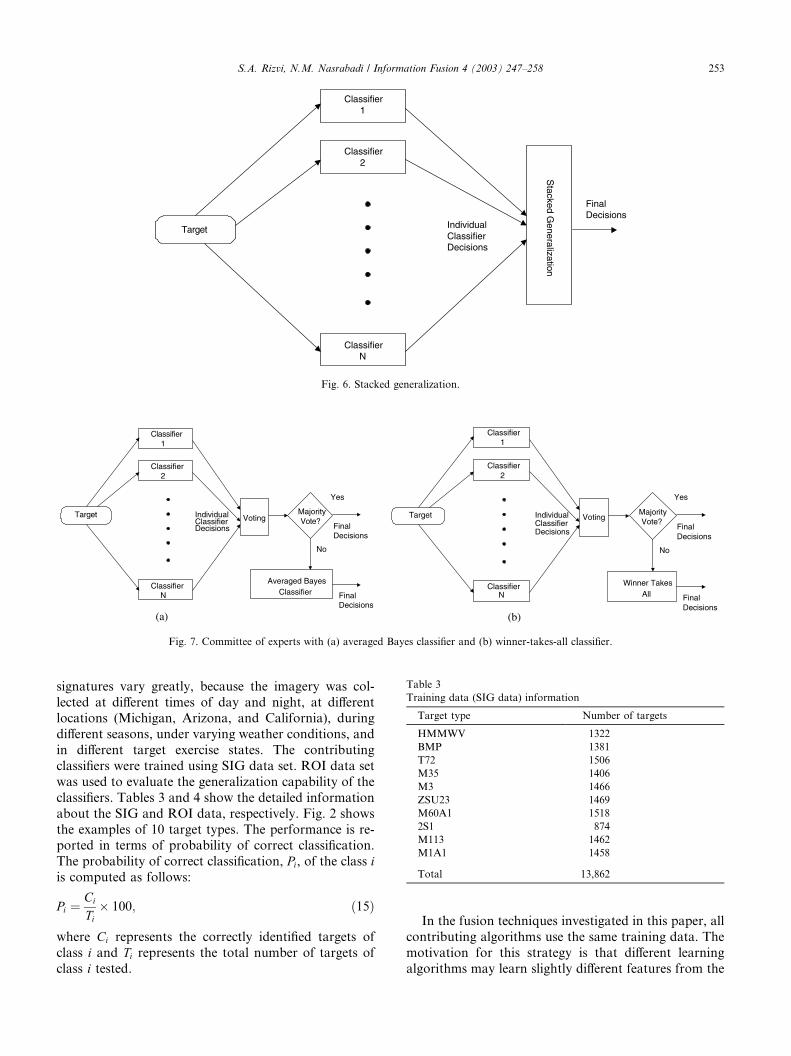
nonlinear function. The stacked generalization method
[19] is a general approach to combine a set of classifiers
to obtain a final decision. A multi-layer perceptron
(MLP) neural network that receives the output of allclassifiers can be trained to implement the combination.
That is,
y ¼ Uðy1; y2 . . . ; ykÞ; ð14Þwhere Uð�Þ is an MLP that implements the stacked
generalization. This MLP provides a nonlinear weight-
ing to the outputs of individual classifiers. The archi-
tecture is shown in Fig. 6.
2.5. Committee of experts
In this technique, a potential target is presented to all
classifiers (experts). Each expert can cast one vote in the
classification decision. All votes carry an equal weight.The decision about the class of the potential target is
then made on a majority vote of the contributing clas-
sifiers. For example, in the case of four experts used in
this research, if three or more classifiers agree on a class
then that classification decision constitutes the final
classification decision. However, there is a possibility
that for some potential targets, some or all experts may
have a differing opinion and, therefore, there may not bea clear majority vote. In this situation we propose to
employ two strategies: (1) use averaged Bayes classifier,
(2) use winner-takes-all strategy (see Fig. 7). A more
detailed analysis of committee of experts approach can
be found in [20,21].
3. Experimental results
In all experiments performed, we have used a total of
17,318 target images from US Army Comanche data set
as our development set. The development set consists of
two database (1) SIG, which is collected under favorable
conditions and has 13,862 target images (10 targettypes), (2) ROI, 2 which is collected under less favorable
conditions and has 3456 target images (five target types).
Specifically, this data set contains 10 military ground
vehicles viewed from a ground-based second-generation
FLIR. The targets are viewed from arbitrary aspect
angles, which are recorded in the ground truth (rounded
to the nearest 5�). The images contain cluttered back-
grounds and some partially obscured targets. The target
IndividualClassifierDecisions
FinalDecisions
Classifier2
Classifier1
ClassifierN
TargetS
tacked Generalization
Fig. 6. Stacked generalization.
IndividualClassifierDecisions
Yes
Target Voting
Classifier2
Classifier1
ClassifierN
MajorityVote?
FinalDecisions
No
Winner TakesAll Final
Decisions
IndividualClassifierDecisions
Yes
Target Voting
Classifier2
Classifier1
ClassifierN
MajorityVote?
FinalDecisions
No
Averaged BayesClassifier Final
Decisions
(b)(a)
Fig. 7. Committee of experts with (a) averaged Bayes classifier and (b) winner-takes-all classifier.
Table 3
Training data (SIG data) information
Target type Number of targets
HMMWV 1322
BMP 1381
T72 1506
M35 1406
M3 1466
ZSU23 1469
M60A1 1518
2S1 874
M113 1462
M1A1 1458
Total 13,862
S.A. Rizvi, N.M. Nasrabadi / Information Fusion 4 (2003) 247–258 253
signatures vary greatly, because the imagery was col-
lected at different times of day and night, at differentlocations (Michigan, Arizona, and California), during
different seasons, under varying weather conditions, and
in different target exercise states. The contributing
classifiers were trained using SIG data set. ROI data set
was used to evaluate the generalization capability of the
classifiers. Tables 3 and 4 show the detailed information
about the SIG and ROI data, respectively. Fig. 2 shows
the examples of 10 target types. The performance is re-ported in terms of probability of correct classification.
The probability of correct classification, Pi, of the class iis computed as follows:
Pi ¼Ci
Ti� 100; ð15Þ
where Ci represents the correctly identified targets of
class i and Ti represents the total number of targets of
class i tested.
In the fusion techniques investigated in this paper, all
contributing algorithms use the same training data. The
motivation for this strategy is that different learning
algorithms may learn slightly different features from the
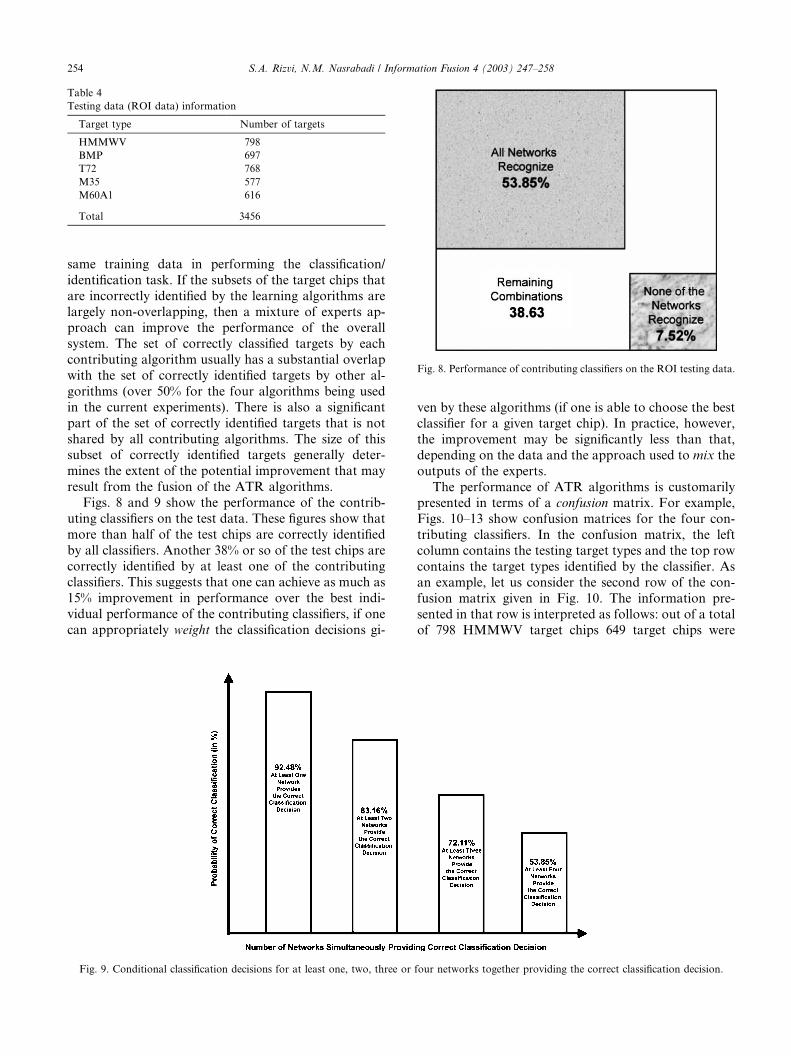
Fig. 8. Performance of contributing classifiers on the ROI testing data.
Table 4
Testing data (ROI data) information
Target type Number of targets
HMMWV 798
BMP 697
T72 768
M35 577
M60A1 616
Total 3456
254 S.A. Rizvi, N.M. Nasrabadi / Information Fusion 4 (2003) 247–258
same training data in performing the classification/
identification task. If the subsets of the target chips that
are incorrectly identified by the learning algorithms are
largely non-overlapping, then a mixture of experts ap-proach can improve the performance of the overall
system. The set of correctly classified targets by each
contributing algorithm usually has a substantial overlap
with the set of correctly identified targets by other al-
gorithms (over 50% for the four algorithms being used
in the current experiments). There is also a significant
part of the set of correctly identified targets that is not
shared by all contributing algorithms. The size of thissubset of correctly identified targets generally deter-
mines the extent of the potential improvement that may
result from the fusion of the ATR algorithms.
Figs. 8 and 9 show the performance of the contrib-
uting classifiers on the test data. These figures show that
more than half of the test chips are correctly identified
by all classifiers. Another 38% or so of the test chips are
correctly identified by at least one of the contributingclassifiers. This suggests that one can achieve as much as
15% improvement in performance over the best indi-
vidual performance of the contributing classifiers, if one
can appropriately weight the classification decisions gi-
Fig. 9. Conditional classification decisions for at least one, two, three or
ven by these algorithms (if one is able to choose the best
classifier for a given target chip). In practice, however,
the improvement may be significantly less than that,
depending on the data and the approach used to mix the
outputs of the experts.
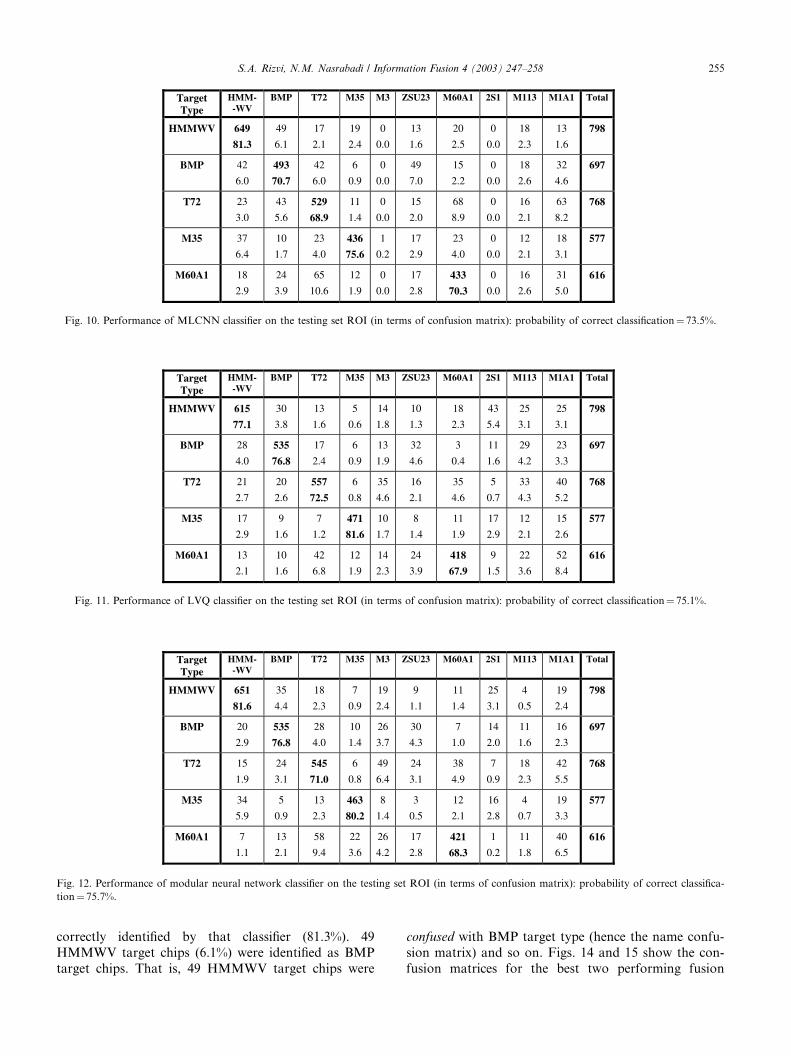
The performance of ATR algorithms is customarilypresented in terms of a confusion matrix. For example,
Figs. 10–13 show confusion matrices for the four con-
tributing classifiers. In the confusion matrix, the left
column contains the testing target types and the top row
contains the target types identified by the classifier. As
an example, let us consider the second row of the con-
fusion matrix given in Fig. 10. The information pre-
sented in that row is interpreted as follows: out of a totalof 798 HMMWV target chips 649 target chips were
four networks together providing the correct classification decision.
TargetType
HMM--WV
BMP T72 M35 M3 ZSU23 M60A1 2S1 M113 M1A1 Total
HMMWV 649
81.3
49
6.1
17
2.1
19
2.4
0
0.0
13
1.6
20
2.5
0
0.0
18
2.3
13
1.6
798
BMP 42
6.0
493
70.7
42
6.0
6
0.9
0
0.0
49
7.0
15
2.2
0
0.0
18
2.6
32
4.6
697
T72 23
3.0
43
5.6
529
68.9
11
1.4
0
0.0
15
2.0
68
8.9
0
0.0
16
2.1
63
8.2
768
M35 37
6.4
10
1.7
23
4.0
436
75.6
1
0.2
17
2.9
23
4.0
0
0.0
12
2.1
18
3.1
577
M60A1 18
2.9
24
3.9
65
10.6
12
1.9
0
0.0
17
2.8
433
70.3
0
0.0
16
2.6
31
5.0
616
Fig. 10. Performance of MLCNN classifier on the testing set ROI (in terms of confusion matrix): probability of correct classification¼ 73.5%.
TargetType
HMM--WV
BMP T72 M35 M3 ZSU23 M60A1 2S1 M113 M1A1 Total
HMMWV 615
77.1
30
3.8
13
1.6
5
0.6
14
1.8
10
1.3
18
2.3
43
5.4
25
3.1
25
3.1
798
BMP 28
4.0
535
76.8
17
2.4
6
0.9
13
1.9
32
4.6
3
0.4
11
1.6
29
4.2
23
3.3
697
T72 21
2.7
20
2.6
557
72.5
6
0.8
35
4.6
16
2.1
35
4.6
5
0.7
33
4.3
40
5.2
768
M35 17
2.9
9
1.6
7
1.2
471
81.6
10
1.7
8
1.4
11
1.9
17
2.9
12
2.1
15
2.6
577
M60A1 13
2.1
10
1.6
42
6.8
12
1.9
14
2.3
24
3.9
418
67.9
9
1.5
22
3.6
52
8.4
616
Fig. 11. Performance of LVQ classifier on the testing set ROI (in terms of confusion matrix): probability of correct classification¼ 75.1%.
TargetType
HMM--WV
BMP T72 M35 M3 ZSU23 M60A1 2S1 M113 M1A1 Total
HMMWV 651
81.6
35
4.4
18
2.3
7
0.9
19
2.4
9
1.1
11
1.4
25
3.1
4
0.5
19
2.4
798
BMP 20
2.9
535
76.8
28
4.0
10
1.4
26
3.7
30
4.3
7
1.0
14
2.0
11
1.6
16
2.3
697
T72 15
1.9
24
3.1
545
71.0
6
0.8
49
6.4
24
3.1
38
4.9
7
0.9
18
2.3
42
5.5
768
M35 34
5.9
5
0.9
13
2.3
463
80.2
8
1.4
3
0.5
12
2.1
16
2.8
4
0.7
19
3.3
577
M60A1 7
1.1
13
2.1
58
9.4
22
3.6
26
4.2
17
2.8
421
68.3
1
0.2
11
1.8
40
6.5
616
Fig. 12. Performance of modular neural network classifier on the testing set ROI (in terms of confusion matrix): probability of correct classifica-
tion¼ 75.7%.
S.A. Rizvi, N.M. Nasrabadi / Information Fusion 4 (2003) 247–258 255
correctly identified by that classifier (81.3%). 49
HMMWV target chips (6.1%) were identified as BMP
target chips. That is, 49 HMMWV target chips were
confused with BMP target type (hence the name confu-
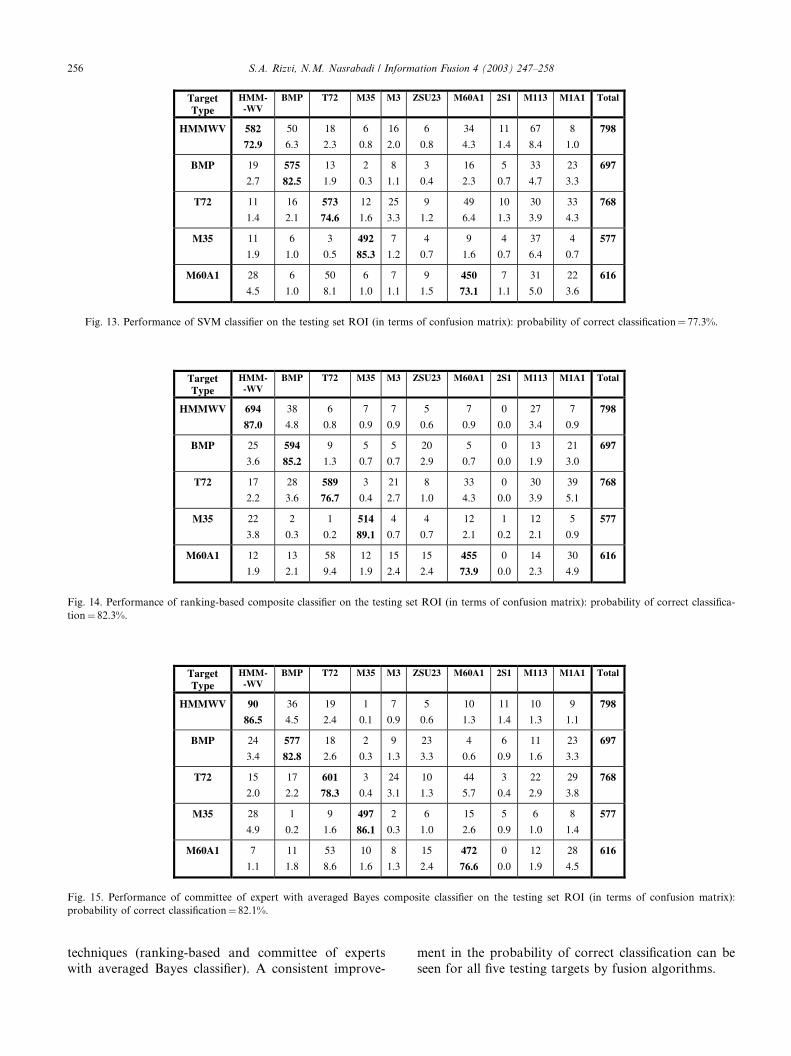
sion matrix) and so on. Figs. 14 and 15 show the con-
fusion matrices for the best two performing fusion
TargetType
HMM--WV
BMP T72 M35 M3 ZSU23 M60A1 2S1 M113 M1A1 Total
HMMWV 582
72.9
50
6.3
18
2.3
6
0.8
16
2.0
6
0.8
34
4.3
11
1.4
67
8.4
8
1.0
798
BMP 19
2.7
575
82.5
13
1.9
2
0.3
8
1.1
3
0.4
16
2.3
5
0.7
33
4.7
23
3.3
697
T72 11
1.4
16
2.1
573
74.6
12
1.6
25
3.3
9
1.2
49
6.4
10
1.3
30
3.9
33
4.3
768
M35 11
1.9
6
1.0
3
0.5
492
85.3
7
1.2
4
0.7
9
1.6
4
0.7
37
6.4
4
0.7
577
M60A1 28
4.5
6
1.0
50
8.1
6
1.0
7
1.1
9
1.5
450
73.1
7
1.1
31
5.0
22
3.6
616
Fig. 13. Performance of SVM classifier on the testing set ROI (in terms of confusion matrix): probability of correct classification¼ 77.3%.
TargetType
HMM--WV
BMP T72 M35 M3 ZSU23 M60A1 2S1 M113 M1A1 Total
HMMWV 694
87.0
38
4.8
6
0.8
7
0.9
7
0.9
5
0.6
7
0.9
0
0.0
27
3.4
7
0.9
798
BMP 25
3.6
594
85.2
9
1.3
5
0.7
5
0.7
20
2.9
5
0.7
0
0.0
13
1.9
21
3.0
697
T72 17
2.2
28
3.6
589
76.7
3
0.4
21
2.7
8
1.0
33
4.3
0
0.0
30
3.9
39
5.1
768
M35 22
3.8
2
0.3
1
0.2
514
89.1
4
0.7
4
0.7
12
2.1
1
0.2
12
2.1
5
0.9
577
M60A1 12
1.9
13
2.1
58
9.4
12
1.9
15
2.4
15
2.4
455
73.9
0
0.0
14
2.3
30
4.9
616
Fig. 14. Performance of ranking-based composite classifier on the testing set ROI (in terms of confusion matrix): probability of correct classifica-
tion¼ 82.3%.
TargetType
HMM--WV
BMP T72 M35 M3 ZSU23 M60A1 2S1 M113 M1A1 Total
HMMWV 90
86.5
36
4.5
19
2.4
1
0.1
7
0.9
5
0.6
10
1.3
11
1.4
10
1.3
9
1.1
798
BMP 24
3.4
577
82.8
18
2.6
2
0.3
9
1.3
23
3.3
4
0.6
6
0.9
11
1.6
23
3.3
697
T72 15
2.0
17
2.2
601
78.3
3
0.4
24
3.1
10
1.3
44
5.7
3
0.4
22
2.9
29
3.8
768
M35 28
4.9
1
0.2
9
1.6
497
86.1
2
0.3
6
1.0
15
2.6
5
0.9
6
1.0
8
1.4
577
M60A1 7
1.1
11
1.8
53
8.6
10
1.6
8
1.3
15
2.4
472
76.6
0
0.0
12
1.9
28
4.5
616
Fig. 15. Performance of committee of expert with averaged Bayes composite classifier on the testing set ROI (in terms of confusion matrix):
probability of correct classification¼ 82.1%.
256 S.A. Rizvi, N.M. Nasrabadi / Information Fusion 4 (2003) 247–258
techniques (ranking-based and committee of experts
with averaged Bayes classifier). A consistent improve-
ment in the probability of correct classification can be
seen for all five testing targets by fusion algorithms.

Table 5
Performance of the contributing classifiers
Contributing
classifier
Probability of correct
classification (training
data)
Probability of correct
classification (testing
data)
MLCNN 96.40% 73.5%
LVQ 99.71% 75.1%
MNN 94.25% 75.5%
SVM 98.10% 77.3%
Table 6
Performance of the fusion techniques
Fusion technique Probability of correct
classification
Averaged Bayes 81.5%
Ranking based 82.3%
Winner-takes-all 79.6%
Stacked generalization 81.0%
Committee of experts (with averaged Bayes) 82.1%
Committee of experts (winner-takes-all) 81.5%
S.A. Rizvi, N.M. Nasrabadi / Information Fusion 4 (2003) 247–258 257
Table 5 presents the overall performance of the con-
tributing classifiers that range from the probability of
correct classification of 73.5–77.3%. Table 6 presents the
overall performance of all the fusion techniques inves-
tigated in this paper. As can be seen in Table 6 that the
ranking-based technique performed the best among all
fusion techniques investigated in this paper (probability
of correct classification¼ 82.3%) with committee ofexperts with averaged Bayes classifier providing com-
parable performance (probability of correct classifica-
tion¼ 82.1%). The performance improvement over the
best contributing classifier is ((82.3)77.3)/77.3) ·100¼ 6.5%.
4. Conclusions
In this paper, we have investigated six different fusion
techniques and demonstrated that the performance of
an ATR system can be improved by using a fusion al-
gorithm. We obtained about 6.5% improvement over the
best performing contributing classifier, which is a sig-
nificant improvement considering the difficult testing
data used in the experiments performed in this paper.An interesting observation was that the stacked gener-
alization technique did not perform better than the av-
eraged Bayes classifier (see Table 6). As mentioned
earlier, in the averaged Bayes composite classifier the
output vectors from the contributing classifiers are given
equal weights. Stacked generalization technique, on the
other hand, attempts to provide a better set of weights
for the output vectors of the contributing classifiersthrough a nonlinear (neural network) processing. The
behavior of stacked generalization technique can be
explained by the fact that the neural networks in thestacked generalization technique were trained using the
training data on which all the contributing networks
provide almost perfect performance (see Table 5). And,
therefore, there may not be much for the neural net-
works in stacked generalization technique to learn from
the training data that can significantly improve the
generalization (the performance on the testing data)
capability of the stacked generalization composite clas-sifier.
It should be noted that in all the fusion techniques
presented in this paper, the contributing algorithms were
not re-trained (as mentioned earlier, the contributing
classifiers were independently developed by different
research groups). The behavior of stacked generalization
technique, however, suggests that a re-training (possibly
jointly) of the contributing algorithms during the fusionprocess may be necessary for further improving the
generalization capability of the fusion techniques. This
is the focus of our future research.
Acknowledgements
This research was in part supported by Army Re-
search Office Grant #DAAD19-001-0533 and PSC-
CUNY Grant #65742-00-34.
References
[1] B. Bhanu, Automatic target recognition: state of the art survey,
IEEE Trans. Aerospace Electron. Syst. AES-22 (4) (1986) 364–
379.
[2] Y. Le Cun, Generalization and network design strategies, in: R.
Preifer, Z. Schreter, F. Fogelman, L. Steels (Eds.), Connectionism
in Perspective, Elsevier, Zurich, Switzerland, 1989.
[3] V. Mirelli, S.A. Rizvi, Automatic target recognition using a multi-
layer convolution neural network, in: Proceedings of SPIE’s
Symposium on Aerospace/Defense Sensing and Controls, Or-
lando, Florida, 8–12 April 1996, Vol. 2755, pp. 106–125.
[4] S.A. Rizvi, A. Chen, V. Mirelli, N.M. Nasrabadi, L.-C. Wang, S.
Der, M. Hamilton, Mixture-of-expert approach to target recog-
nition in FLIR imagery, in: Proceedings of Third Workshop on
Conventional Weapon ATR: Detection, Classification, Recogni-
tion & Identification of Targets in Clutter, Redstone Arsenal,
Alabama, 13–15 November 1996, pp. 173–203.
[5] Waibel, T. Hanazawa, G. Hinton, K. Shikano, K. Lang, Phoneme
recognition using time-delay neural networks, IEEE Trans.
Acoust. Speech Signal Process. 37 (1989) 328–339.
[6] Y. Bengio, Y. Le Cun, D. Henderson, Globally trained handwrit-
ten word recognizer using spatial representation, space displace-
ment neural networks and hidden Markov models, Adv. Neural
Inf. Process. Syst. 6 (1994) 937–944.
[7] L.A. Chan, N.M. Nasrabadi, V. Mirelli, Multi-stage target
recognition using modular vector quantizers and multilayer
perceptrons, Proc. Comput. Vis. Pattern Recogn. (1996) 114–119.
[8] S.S. Haykin, Neural Networks: A Comprehensive Foundation,
Macmillan College Publishing, New York, 1994.
[9] L.-C. Wang, S. Der, N.M. Nasrabadi, S.A. Rizvi, Automatic
target recognition using neural networks, in: Proceedings of SPIE

258 S.A. Rizvi, N.M. Nasrabadi / Information Fusion 4 (2003) 247–258
Conference on Algorithms, Devices, and Systems for Optical
Information Processing, San Diego, July 1998, pp. 278–289.
[10] P. Bharadwaj, L. Carin, Infrared-image classification using hidden
Markov tress, IEEE Trans. PAMI, submitted for publication.
[11] L. Carin, FLIR classification using physics-motivated features and
support vector machines, Presentation at US Army Research
Laboratory, October 2001.
[12] H. Drucker, C. Cortes, L.D. Jackel, Y. LeCun, V. Vapnik, Boosting
and other ensemble methods, Neural Comp. 6 (1994) 1289–1301.
[13] T.K. Ho, J.J. Hull, S.N. Srihari, Decision combination in multiple
classifier systems, IEEE Trans. Pattern Anal. Mach. Intell. PAMI-
16 (1) (1994) 66–75.
[14] K. Woods, W.P. Kegelmeyer Jr., K. Bowyer, Combination of
multiple classifiers using local accuracy estimates, IEEE Trans.
Pattern Anal. Mach. Intell. PAMI-19 (4) (1997) 405–410.
[15] R.A. Jacobs, M.I. Jordan, Learning piecewise control strategies in
a modular neural network architecture, IEEE Trans. Syst. Man
Cybernet. SMC-23 (1993) 337–345.
[16] J.A. Benediktsson, J.R. Sveinsson, O.K. Ersoy, P.H. Swain,
Parallel consensual neural networks, IEEE Trans. Neural Net-
works NN-8 (1) (1997) 54–64.
[17] L. Xu, A. Krzy _zzak, C.Y. Suen, Methods of combining multiple
classifiers and their applications to handwriting recognition, IEEE
Trans. Syst. Man Cybernet. SMC-22 (2) (1992) 418–435.
[18] M.P. Perrone, General averaging results for convex optimization,
in: Proceedings of Connectionist Models Summer School, 1993,
pp. 364–371.
[19] D.H. Wolpert, Stacked generalization, Neural Networks 5 (1992)
241–259.
[20] L.-C. Wang, S.Z. Der, N.M. Nasrabadi, A committee of networks
classifier with multi-resolution feature extraction for automatic
target recognition, in: Proceedings of IEEE International Confer-
ence on Neural Networks, Vol. III, 1997.
[21] J.A. Benediksson, I. Kanellopoulos, Decision fusion methods in
classification of multisource and hyperdimensional data, IEEE
Trans. Geosci. Remote Sensing 37 (3) (1999) 1367–1377.