ЕТАИ 2003 etai2003 - osti.gov
TRANSCRIPT

З Д Р У Ж Е Н И Е З ЛE / 1 E К Т Р О Н И К АТ Е Л Е К О М У Н И К Л Ц И ИА В Т О М А Т И К А ИИ Н ф О Р М А Т И К АИ А Р Е П У В / 1 И К АМ А К Е Д О Н И Ј А
S O C I E T Y F O B .E L E C T R O N I CT E L E C O M U N I C A T I O N SA U T O M A T I C S A N DI N F O R M A T I C SO F T H E R E P U B L I CO F M A C E D O N I A
MK0600046
ЗБОРНИК HA ТРУДОВИ
ЕТАИ 2003VIНАЦИОНАЈША КОНФЕРЕНЦИЈА
CO МЕЃУНАРОДНО УЧЕСТВО
Уредник: Доц. d-p Миле Ј. Сшанковски
PROCEEDINGS
ETAI2003VI NATIONAL CONFERENCE WITHINTERNATIONAL PARTICIPATION
Editor: Doc. D-r Mile J. Stankovski
17-20 Септември, Охрид, Република Македонија17-20 September, Ohrid, Republic of Makedonia

Шесша национална конференција со меѓународно учесшво ЕТАИ'2003Sixth National Conference With International Participation ЕТАГ2003
Охрид, Република МАКЕДОНИЈА - Ohrid, Republic of MACEDONIA17-20. IX 2003
MK0600047
ДИЕЛЕКТРИЧНА РЕЛАКСАЦИОНАСПЕКТРОСКОПИЈА HA НЕМАТСКИ ТЕЧЕН
KPИCTAЛl-(4•TRANS-4-PENTYLCYCLOHEXYL)-2-(4-ISOTHIOCYANOETHANE)-5CHTE
Маргарита Гиновска
Електротехнички факултет, Карпош II, бб, П. Фах 574,1000 Скопје, Македонија[email protected]
Извадок - Брзиот развој на технологија-та на течнокристални дисплеи го стимули-ра добивањето и синтезата на нови течно-кристални материјали со оптимални фи-зички карактеристики. Тие претставуваатовнова во производството на нови течникристали и нивни смеши, со широк интер-вал на мезофазна состојба, добра хемискастабилност, оптимални вредности за ани-зотропните големини (оптички, електрич-ни, еластични итн.) што директно влијаена електрооптичките карактеристики натечнокристалните дисплеи (LCD).
Предмет на истражување е новосинтети-зиран примерок на нематски течен кри-стал (5СНТЕ), на Институтот за военитехнологии во Варшава, Полска. Споредсвојата структурна градба се карактери-зира со слабо поларна терминална групаNCS во молекуларната верига и сврзувач-ка етилен група, која силно влијае на мо-лекуларните физички параметри на овојтечен кристал во нематската фаза.
Мерењата се извршени со Hewlett Pac-kard 4194A Impedance Analyser, во фре-квентен интервал од 10 kHz до 100 MHz,во нематска и изотропна фаза на испиту-ваниот примерок (температурен интер-вал од 30 до 80°С).
Co методот на диелектричната релакса-циона спектроскопија се добиваат темпе-ратурните и фреквентни карактеристикина реалниот и имагинарниот дел на дие-лектричните константи. Потоа, со кон-
струкција на Cole-Cole дијаграмите и ко-ристење на емпириската релација на На-vriliak -Nagami, спектарот се разделува наодделните апсорпциони криви. Преку нив-ната анализа се добиваат молекуларни по-датоци за времињата на релаксација ( завртењето на молекулите околу краткитемолекуларни оски), диелектричната јачи-на и видот на релаксациониот процес.
Во процесот на фитување на експеримен-талните резултати со теориските прекурелацијата на Cole-Cole, варијабилнитекоефициенти &| примаат многу мали вред-ности (10"2), што укажува дека станувазбор за Debye-евски тип на релаксацио-нен процес. Од температурната зависностна диелектричните релаксациони времи-ња и константите на вискозност, со кон-струкција на Arrhenius кривите се опреде-лува големината на нематскиот потенци-јал, односно активационите енергии иефективната должина на молекулите воизотропна фаза.
Клучни зборови - течни кристали, нема-тици, диелектрична анизотропија, рела-ксација.
1. ВОВЕД
Диелектричните проучувања на течнитекристали даваат корисни податоци занивната молекуларна структура, меѓумо-лекуларните интеракции и процеси наагрегација. Кај нематските течни криста-
Е-23
ли постои можност да се контролира мо-лекуларната ориентација во целиот при-мерок со примена на електрично или маг-нетно поле, или со специјална обработкана површината на електродите во конден-заторот. На тој начин се регистрира дие-лектричниот одговор во однос на праве-цот на главните молекуларни оски.
Температурната и фреквентната завис-ност на диелектричната константа прет-ставува важна база на податоци за дина-миката на нематогените молекули. Притоа, ако се познати и вискозните параме-три, од диелектричните релаксациони ме-рења може да се пресмета придонесот нанематскиот потенцијал за молекуларнатадинамика.
2. ТЕОРИСКИ ОСНОВИ
Во фреквентниот интервал каде се при-менува диелектричната релаксационаспектроскопија, неопходно е да се мерикомплексната диелектрична константа £*= £'- /ѓ^како функција од фреквенцијата/. Реалниот дел на диелектричната кон-станта £'(/) и диелектричните загуби е"(/) како имагинарен дел, се поврзани сорелацијата на Havriliak-Nagami [1]:
каде што £. - е високофреквентна грани-ца за е', е0 - е нискофреквентна границаза £'(статичка диелектрична константа),$, - £. диелектричен прираст,/д е релакса-циона фреквенција, при што/л = (2от)"', a- Cole-Cole дистрибуционен параметар и 0- асиметричен параметар. Постојат пове-ќе видови на релаксациони процеси:а) Ако а = 0 , ytf=0, едноставното експо-
ненцијално опаѓање на Рм се каракте-ризира со едно релахсационо време -тоа претставува Debye-ев процес на ре-лаксација.
б) Ако Ј3= 0; 0 < а< 1; функцијата опишу-ва релаксација со симетрична дистри-буциона функција за т- таа се нареку-ва Cole-Cole релаксациона функција.
в) Ако а,/3се различни од 0, се користирелацијата на Havriliak-Nagami за аси-метрична распределба на т.
Симетријата на диелектричните спек-трални криви се гледа од формата на екс-
перименталната крива e'-f^e") која штое позната како Cole-Cole крива.Во ориентиран примерок на нематски те-чен кристал, нематогените молекули ро-тираат околу трите оски на симетрија:долгата и кратката молекуларна оска, aтретата оска е директорот п. За типичнонематогени супстанци апсорпцијата наелектромагнетна енергија како резултатна овие три мода на ротација, може да сеочекува во фреквентен интервал од не-колку MHz до неколку GHz.
Апсорпцијата на електромагнетна енер-гија се јавува само кога молекуларнатаротација е проследена со промени во про-екцијата на молекуларниот диполен мо-мент врз правецот на применетото елек-трично поле Е. Поради тоа во диелек-тричниот апсорпционен спектар £\[со) до-минира апсорпцијата што се должи на мо-лекуларната ротација околу краткатаоска [2]. Исто така, во спектарот може дасе јави и апсорпциона крива што се дол-жи на ротација околу долгата молекулар-на оска, но со многу мал придонес. За це-лосно (перфектно) ориентиран нематскитечен кристал молекуларната ротацијапо конусот околу директорот п (прецеси-оно движење) не дава придонес во дие-лектричниот спектар £\\(а>). Експеримен-талниот диелектричен спектар на немат-скиот течен кристал во изотропна и не-матска фаза може да се раздели во еле-ментарни апсорпциони криви со користе-ње на емпириската формула на Cole-Cole:
( 2 )
= £« + >"
Оваа формула не ја зема предвид дистри-буцијата на релаксационите времиња. Заграничната вредност на дистрибуциониотпараметар kt = 0, релаксациониот процессе опишува со едно време на релаксација(Debye-ев тип на релаксација). Д, и т{ седиелектричната јачина и релаксационотовреме, а заедно со £, тие се варијабилнипараметри на подесуван>е при фитувањена експерименталниот спектар.
Ротацијата на молекулот околу краткатамолекуларна оска дава најважни инфор-мации за молекуларната динамика воприсуство на нематски потенцијал. Аковредностите за параметарот it, ce многу
Е-24

мали (=10"2), тоа значи дека релаксацијатае приближно од Debye-евски тип.
Ако е позната зависноста на вискозностаод температурата, во изотропна и немат-ска фаза, може да се анализира целоснодинамиката на молекулите во нематскитетечни кристали.
Според моделот на Debye за ротационатадифузија на диполите, температурната за-висност на релаксационите времиња еопределена преку дифузионата констана-та или вискозноста. За течните кристалинематскиот потенцијал на подредувањепридонесува за ротационите релаксацио-ни процеси. Активационата енергија вонематската фаза претставува енергетскабариера кон преориентацијата на диполи-те. Таа енергија ги изразува силите на ме-ѓумолекуларно заемнодејство кои јаопределуваат ориентационата подреде-ност во НТК, т.е. го отежнуваат вртење-то на молекулите . Поради тоа зависностана релаксационото време год температу-рата се претставува со релацијата на Агг-henius :
= т0 ехрRT
(3)
ЕА е активационата енергија дадена воJ/mol, R е универзална гасна константа воJ/moIK а Т е термодинамичката темпера-тура во К. При експерименталните мере-ња се забележува дека активационатаенергија за диполната преориентација се-когаш се менува на преминот од изотроп-на во нематска фазна состојба. Оваа про-мена се јавува поради скоковити променина степенот на подреденост и вискозностапри температура TN!. Ако се претставиистата крива во линеарна форма, т.е. Inг=/(1/7), или таканаречена Arrhenius кри-ва, од неа може да се определи активаци-оната енергија.
EA=tgaR. (4)
Коефициентот на правец на таа крива,особено во оној дел каде што линеарнатазависност е наполно изразена, овозможу-ва директно определување на активацио-ната енергија од релацијата (4).
2. ЕКСПЕРИМЕНТАЛЕН ДЕЛ
Диелектричниот релаксационен спектарза испитуваниот НТК е добиен од мере-њата со HP 4194A Impedance / Gain-Phase
Analyser во фреквентен интервал од 10kHz - 100 MHz, кој има надворешна импе-данс сонда. Мерната кондензаторска ке-лија се состои од три рамни електродиизработени од бакар, превлечени со злат-на обвивка, поставени на растојание 100цт. На излезот од мерната келија е по-ставен (PtA) сензор кој е поврзан со си-стемот за терморегулација UNIPAN 650Hи засилувач MERATRONIK. Температура-та се мери со точност до стоти делови одстепенот. За да се добие почетна предо-минантна ориентација на молекулите вомерната келија се применува електричнополе, бидејќи импеданс сондата е многуосетлива на магнетно поле.
Мерењата на диелектричните константисе извршени во изотропна и нематска фа-за за дадениот течнокристален примерок.Диелектричниот спектар се добива заопределени температури од 30 °С до 80 °С,при 400 различни фреквенции со чекор од250 kHz, во вид на две криви на зависност:за капацитетот С = С (Ј) и за диелектрич-ните загуби D = D(f), кои потоа се обра-ботуваат со HP-Vee програмот.
Испитуваниот течнокристален материјалспаѓа во класата на термотропни течникристали кои егзистираат во нематскамезофазна состојба. Според молекулар-ната форма е класифициран во групатана каламитски системи со карактеристич-на цврста прачкаста структура на молеку-лите. Синтетизиран е на Институтот захемија при Универзитетот за воени тех-нологии, Варшава, Полска.
Како сврзувачки групи меѓу централнитејадра или другите делови на молекулитекај овој течен кристал се јавуваат етиленгрупите. Овие групи силно влијаат врз ге-ометријата на молекулата - од една стра-на ја зголемуваат нејзината должина штолридонесува за поголемата линеарност намолекулата; од друга страна овие групиможе да создадат накривена (bend) моле-куларна структура, што од своја странапак силно влијае на мезогените својства иголемината на мезогениот потенцијал. Притоа јасно може да се види дека станува зборза доста флексибилни молекули, иако спа-ѓаат во групата на каламитски нематскитечни кристали. Особено е изразена фле-ксибилноста во средината на молекулотпоради што може да се најдат во две раз-лични состојби на минимална енергија.
Е-25
3. РЕЗУЛТАТИИДИСКУСИЈА
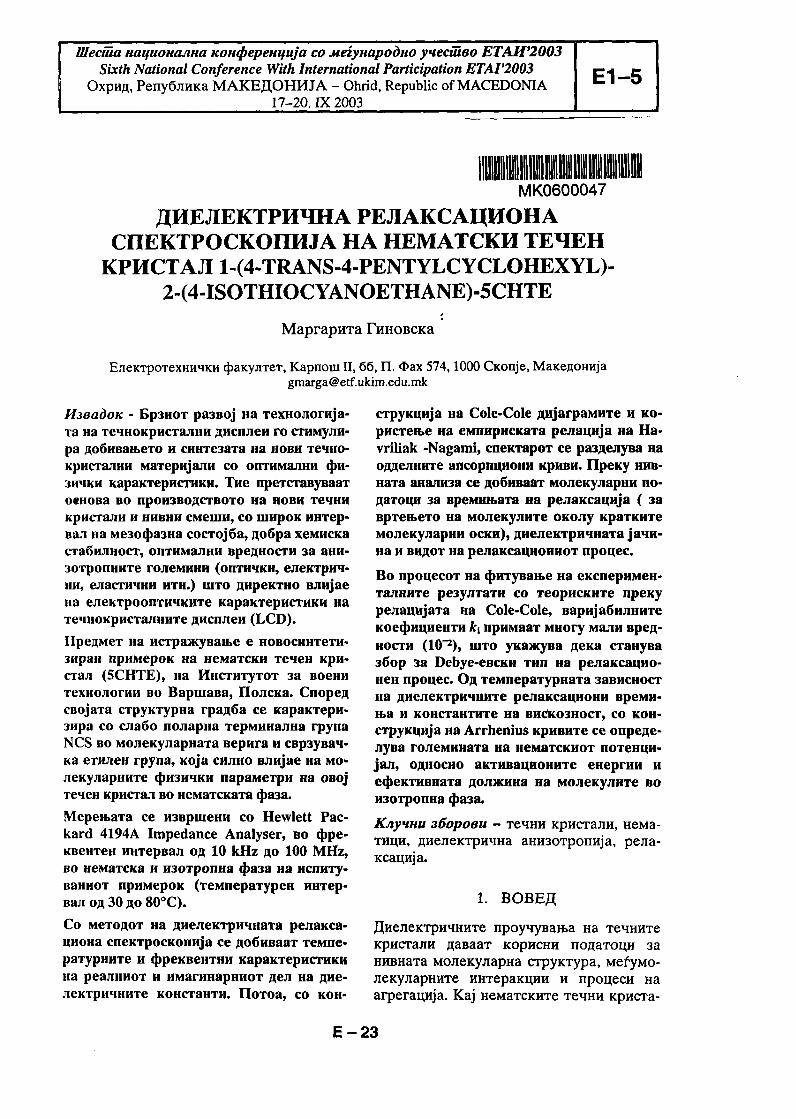
Карактеристичната форма на добиените3D криви за диелектричниот спектарпретставени на сл. 1 дава можност да сезаклучи за квалитетот на даден течнокри-стален примерок според: големината надиелектричните константи, видот на пре-мин од една во друга фазна состојба -ос-тар премин означува подобри карактери-стики и поголема чистота на НТК. Истотака, според формата на апсорпционатакрива може да се суди за типот на диеле-ктричната релаксација, а од двете кривисе проценува ширината на температурни-от интервал во кој егзистира одреденамезофазна состојба [3].
Сл. 1. Температурна и фреквентна зависностна реалниот е'и имагинарниот дел е*оддиелектричната константа за 5 СНТЕ во
изотропна и нематска фаза, при паралелнаориентација на молекулите во однос
на електричното поле
Преку компаративната анализа на овиекриви со познати литературни податоциможе да се забележат извесни спецификиво споредба со анализите на течни кри-стали од групата на цијанобифенилите(7СВ), кој има потврдени позитивни фи-зички својства оптимални за апликативницели [1].
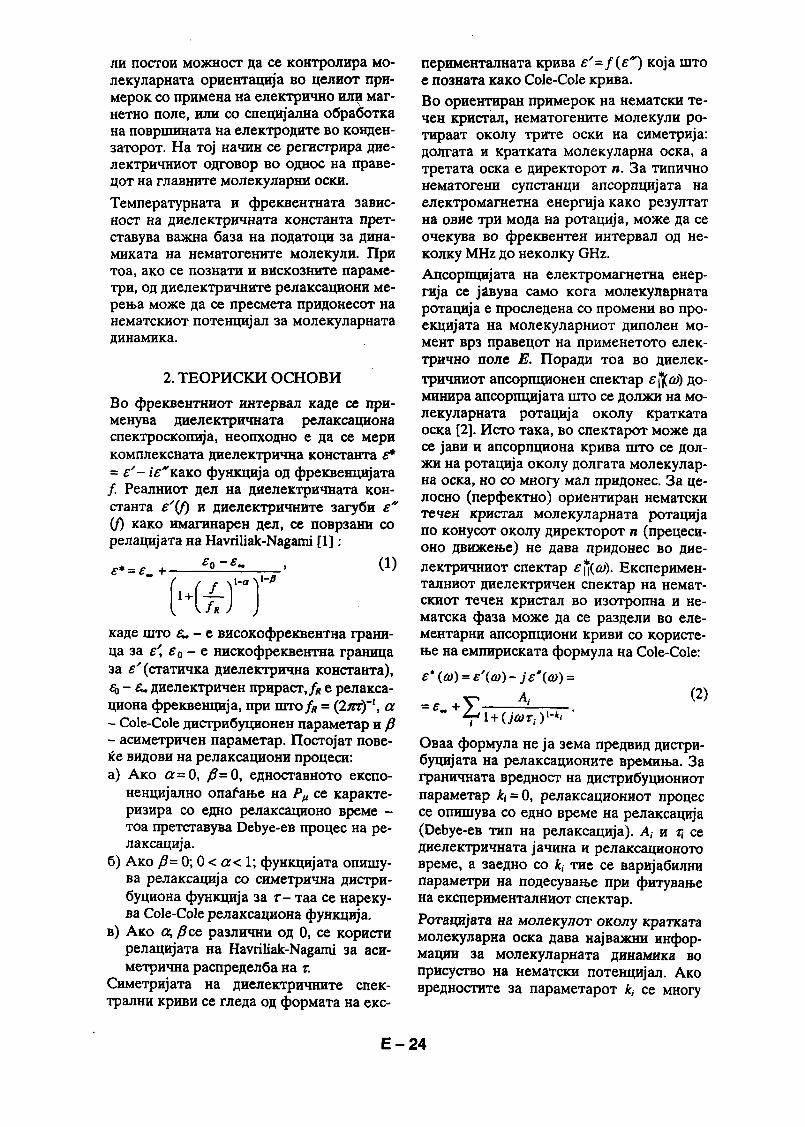
Податоците од експерименталните мере-ња се обработени со специјализиранипрограми за диелектрична релаксација одкаде се добиени вредностите за релакса-ционоите времиња и диелектричната ја-чина. Може да се забележи дека станувазбор за доминантен придонес само на ед-на апсорпциона крива кај испитуваниотНТК, односно втората апсорпциона кри-ва има мали времиња на релаксација г2 имногу мали вредности за амплитудите Аг.Токму затоа практично се занемаруваатвторите апсорпциони криви и се смета де-ка станува збор за Debye-евски тип на ре-лаксација (сл. 2). Во процесот на фитува-ње, на експерименталните резултати сотеориските, во равенката на Cole-Cole вари-јабилните коефициенти ki примаат многумали вредности (ред големина 1СГ2).
е"6
4 -
2 - 1
1 ' ' ' 1 ' ' ' 1 ' ' ' 1 ' ' '
, , , 1 . , , 1 . . , 1 , , ,"
10 12 14
3 4 5 6 7 8
Сл. 2. Cole-Cole дијаграми за 5 СНТЕ при даде-на температура: а) за температура Т= 36°С; б)за температура Т= 65 °С. Точките ги претста-вуваат резултатите од експерименталните ме-рења, а полната линија е добиена со фитува-
ње на теориската крива
Ако се споредат вредностите за времетона релаксација за кое се врти молекулотоколу пократката оска со литературнитеподатоци [2, 3], може да се забележи деканајмало време пројавува течниот кристал5СНТЕ, споредливо по големина со вре-мињата на релаксација кај течните кри-стали од типот на цијанобифенилите.Преминот од нематска во изотропна фазасекогаш е проследен со остар скок во
Е-26
вредностите за т, А и за статичките ком-поненти на диелектричната константа.
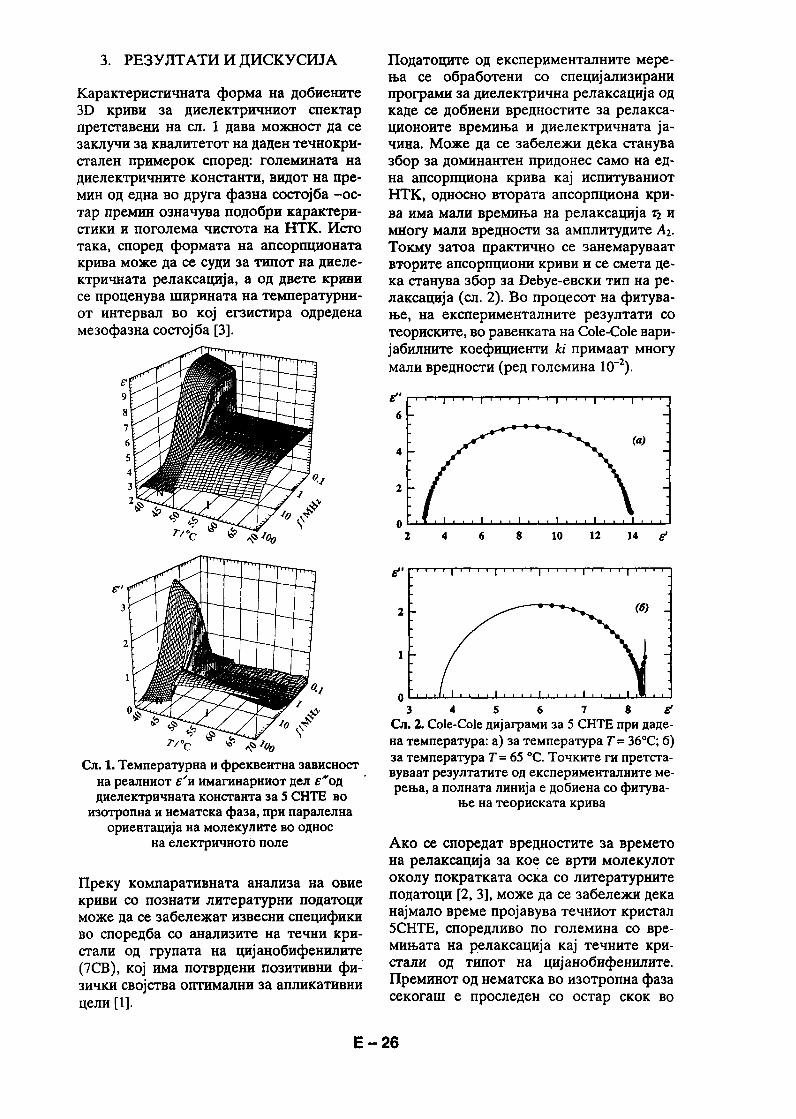
Многу важни информации за НТК се до-биваат од Arrhenius кривите кои ја прика-жуваат зависноста In t=f(T~l), или прекуистата крива конструирана за вискозиме-триските мерења [3]. Од Arrhenius криви-те дадени на сл. (3) за 5СНТЕ од диеле-ктричните и вискозните мерења, спореднаклонот на линеарниот дел за нематскаи изотропна фаза се определени вредно-стите за енергијата на активација по р-ка-та ( 4). Енергијата на активација што еповрзана со времето на релаксација закое молекулите се вртат околу краткитемолекуларни оски ја одразува динамика-та на молекулите и затоа покажува зна-чителен скок на преминот од I во N фаза,што се должи на нематската подреденостна молекулите. Од друга страна пак,енергиите на активација од вискознототечење не се разликуваат многу при пре-минот од една во друга фазна состојба [4].
Т/пѕ70
60
50
40
30
20
10
0
C ' ' ' 1 ' ' ' ' 1 ' '
•
f Лj -:, . . , i , . , , i , .
1 i • • • ' i ' ' ' ' i ' ' ' ' l ' ' ' ' i ':
• ;
- ;
• -
1
i i
i i
1
40 45 50 55 60 65 70
77 °C
In*"
4 -
3
2
1 -
2.9
1 . 1
-
EA = 32.27 kj/mol
' , , , , i , , i
' l|11
f1
1
11
. 11
. 1 . 1
N :
=92.24 IcJ/moC
, . , i "
3.0 3.13 Г"1 / К"1
3.2
103 ГСл. З. Температурна зависност на времето
на релаксација Т\ и Arrhenius крива In rза времето на релаксација за 5 СНТЕ
Во однос на измерените вредности за ви-скозноста при смолкнување од експери-
ментот, може да се забележи извесно на-малување на вискозноста кај 5СНТЕ воспоредба со големината на вискозноста замолекулите од нематките течни кристалиЗССРЕ и 5ССРЕ, со цијано (силно полар-на) крајна група [2], што е во соласност сотеориските очекувања.
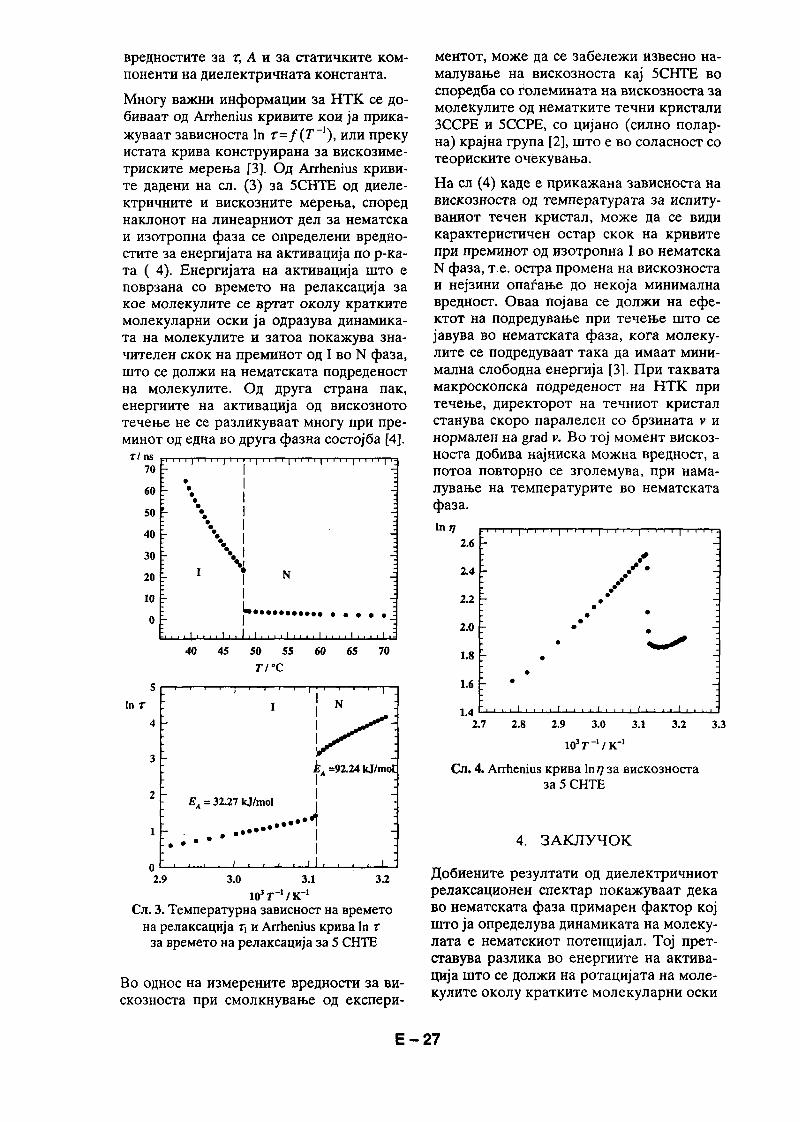
На сл (4) каде е прикажана зависноста навискозноста од температурата за испиту-ваниот течен кристал, може да се видикарактеристичен остар скок на кривитепри преминот од изотропна I во нематскаN фаза, т.е. остра промена на вискозностаи нејзини опаѓање до некоја минималнавредност. Оваа појава се должи на ефе-ктот на подредување при течење што сејавува во нематската фаза, кога молеку-лите се подредуваат така да имаат мини-мална слободна енергија [3]. При такватамакроскопска подреденост на НТК притечење, директорот на течниот кристалстанува скоро паралелен со брзината v инормален на grad v. Bo тој момент вискоз-носта добива најниска можна вредност, aпотоа повторно се зголемува, при нама-лување на температурите во нематскатафаза.
In т]
2.6
2.4 -
2.7 2.8 2.9 3.0 3.1 3.2 3.3
Сл. 4. Arrhenius крива In 77 за вискозностаза 5 СНТЕ
4. ЗАКЛУЧОК
Добиените резултати од диелектричниотрелаксационен спектар покажуваат декаво нематската фаза примарен фактор којшто ја определува динамиката на молеку-лата е нематскиот потенцијал. Тој прет-ставува разлика во енергиите на актива-ција што се должи на ротацијата на моле-кулите околу кратките молекуларни оски
Е-27

и вискозното течење во нематската фаза.Во изотропната фаза примарна улога водинамиката на молекулите има висжознототечење, затоа што вредностите за енергии-те на активација за диелектричната рела-ксација и за вискозноста во изотропна фа-за се приближно исти по големина.
Ако се направи компаративна анализа вооднос на големината на нематскиот по-тенцијал q кај одредени течнокристалниматеријали [2] може да се забележи декаповисоки вредности има течниот кристалод типот 5СНТЕ, што се објаснува со влија-нието на етилен сврзувачките групи и цик-лохексановите јадра во неговата молеку-ларна структура, за разлика од цијаноби-фенилите кои се карактеризираат со пома-ли вредности за нематскиот потенцијал.
Значи големината на нематскиот потен-цијал за овој течнокристален примерок ивисината на статичката диелектричнакомпонента укажуваат на можноста занегова апликативна примена во дипсплеј
технологијата, особено за приготвувањена течнокристалните смеши. Co извеснододавање на мали примеси од силно ди-полни молекули, како на пример цијано-бифенилите или изотропни молекули собензенови јадра, може да се постигнат оп-тимални параметри за негова конкретнапримена. При тоа треба да се напомене де-ка големината на вискозноста не е пресу-ден и единствен услов кој ја одредува ап-ликативната улога на течните кристали.
ЛИТЕРАТУРА
[1] D. A. Dunmur, A. Fukuda, Phys. Properties ofLiquid Crystals - Nematics, INSPEC Pub., U.Kingdom, 2001.
[2] M. Ginovska, G. Czechowski, A. Andonovski,J. Jadzyn, Liquid Crystals (Taylor & Francis),Vol. 29, 1201-1207, 2002.
[3] J. Jadzyn, G. Czechowski, Phys. Review E, Vol.64,0527002,2001.
[4] S. Urban et al, Liquid Crystals, Vol. 28, 2000.
Summary
DIELECTRIC RELAXATION SPECTROSCOPYOF NEMATIC LIQUID CRYSTAL l-(4-TRANS-4-PENTYLCYCLO-
HEXYL)-2-(4-ISOTHIOCYANOETHANE) - 5CHTE
Margarita Ginovska
Faculty of Electrical Engineering .Кагроѕ П, bb, P.O.Box 574, 1000 Skopje, Macedonia,[email protected]
A rapid progress in LCD technology is a big stimu-lant to synthesize and design of new liquid crystalli-ne materials with optimal physical properties forproduction of novel LC mixutures, with a wide ran-ge of the mesophase, good chemical stability, opti-mal values for anisotropic properties (optical, elec-trical, elastic etc.), because they affect the electro-optical characteristics of LCD.
The investigated sample of NLC is synthesized atthe Institute of technologies - the Military Academyin Warsaw, Poland. The chemical structure of thiscompound is characterized with NCS -week polarterminal group at the end of this molecule and twoethylene linking groups between the core units.,which couse the strong influence on the molecularphysical properties in the nematic phase.
The experimental measurement was done by Hew-lett Packard 4194 A, Impedance Analyser, in thefrequency region from 10 kHz to 100 MHz, in thetemperature range from 30 °C to 80 °C.
Dielectric relaxation spectroscopy provide us withuseful molecular data: the relaxation times (corres-ponding to the molecular rotation around the shortaxis), dielectric strength and type of dielectric rela-xation processes. From the temperature dependen-ces of relaxation times and shear viscosity, thestrength of the nematic potential (i.e. the activationenergies) of the molecules in isotropic and nematicphases were estimated.
With the fitting procedure of experimental data tothe empirical Cole - Cole equation, the type of rela-xation process is determined as Debye relaxation,because the values of variable coefficient kj are clo-se to 10'2. By the construction of the Arrheniusplots for relaxation times and viscosity, the valuesof activation energies are obtained and the nematicpotential is estimated for this molecules.
Keywords: liquid crystals, nematics, dielectric ani-sotropy, relaxation
E-28
Шесша национална конференција со меѓународно учесшво ЕТАИ1003Sixth National Conference With International Participation ЕТАГ2003
Охрид, Република МАКЕДОНИЈА - Ohrid, Republic of MACEDONIA17-20. IX 2003
MK0600048
ЕЛЕКТРО-ОПТИЧКИ ПАРАМЕТРИHA СИСТЕМОТ ПОЛИМЕР CO МОЛЕКУЛИ BO ФОРМА
HA ВЛАКНЕСТИ ПРАЧКИ/ДИМЕТИЛФОРМАМИД
Христина Спасевска
Електротехнички факултет, Универзитет "Св. Кирил и Методиј" Скопје,Карпош II, б.б. П. Фах 574,1000 Скопје, Република Македонија-
Извадок - Полимерите со молекули воформа на прачки (rigid rod polymers) ceматеријали од голем научен и технолошкиинтерес, поради нивните специјални својс-тва, како што се изотропно-нематските идругите типови на премини. Еден од најго-лемите проблеми што се јавува при истра-жувањето на овие полимери, на молеку-ларно ниво, во раствори, е нивната маларастворливост во повеќето стандарднирастворувачи. Растворливоста се подобру-ва кога за макромолекулите, при синтеза-та, се "врзуваат" странични флексибилнисинџири [1]. Овие полимери припаѓаат наедна нова класа, т.н. полимери со молеку-ли во форма на влакнести прачки (hairyrod polymers), и има голем потенцијал занивна технолошка апликација. Поради ни-вните нелинеарни оптички својства, иможностите за самоорганизирање во су-пермолекуларни структури (влакна и фил-мови), можат да се користат во електрон-ската и телекомуникациската индустрија,како и во дисплеј-технологиите [2]. Затоа,од голем научен интерес е контролирање-то на горе спомнатите својства кај овиеполимери, како и поврзувањето на моле-куларните и макроскопски карактеристи-ки, а нивната потполна карактеризација(во раствори и цврста состојба) претставу-ва вистински императив.
Полимерот POD-2, што е предмет на истра-жување, припаѓа на класата полимери сомолекули во форма на влакнести прачки и есинтетизиран за прв пат [3], со цел да се да-де придонес во нивната карактеризација.Мерењата на разредените раствори од сис-темот POD-2/диметилформамид (DMF) сенаправени со методот електрично двојнопрекршување на светлината, на три тем-ператури (25, 40 и 55°С). За различни кон-центрации на системот, од добиените еле-ктро-оптички сигнали (ЕОС) е определеназависноста на електричното двојно прекр-шување (An), од применетото електричнополе (Е2). Co истражувањето на електро-оптичките ефекти, особено студирањетона начинот на нивното создавање и губе-ње, при примена на правоаголни елек-трични импулси, е пресметано времето наслободна релаксација 7б на полимернитемолекули [3]. Од овие параметри, како иод добиените податоци за растење н опа-ѓање на ЕОС е определен деформационенелектро-оптички ефект.
Клучни зборови - влакнести прачки, ел-ектрично двојно прекршување, време нарелаксација.
Е-48
1. ВОВЕД 2. ТЕОРИСКИ ОСНОВИ
Примерокот POD-2 е полимер, синтетизи-ран во Институтот за полимери, при Бу-гарската Академија на Науките. Неговитеповторувачки единки се состојат само одеден 1,3,4-оксадијазолов прстен (сл.1), коисе поврзани меѓу себе со многу краткиспејсери (СН-група).
-О4сн, /п
Сл. 1. Структурна формула на полимеротPOD-2
Овие макромолекуларни структури имаатформа на парчки. За се подобри нивнатарастворливост за спејсерите се врзанистранични флексибилни вериги (влакна),кои даваат суштинска промена во својс-твата на макромолекулите и го вбројуваатовој полимер во класата на полимери сомолекули во форма на влакнести прачки.Неговата среднобројна молекуларна масамп е определена со методот гел пермеа-
билна хроматографија (Gel PermeationChromatography) и изнесува мн= 2450.
Структурата на макромолекулите од овојполимер и малата вредност на пп овозмо-
жува голема скелетна цврстина, а стра-ничните флексибилни групи - појава наагрегациони феномени [4].
Испитувањето на агрегацијата како и ка-рактеризацијата електро-оптичките свој-ства на полимерот се направени со мето-дот електрично двојно прекршување насветлината (ЕДП). Тој е еден од електро-оптичките методи, со кој може да сеистражуваат својствата (електро-оптичкии електродинамички) на макромолекулитево раствори.
При истражувањата со методот ЕДП насветлината во разредени раствори на по-лимерите, преку набљудување на електро-оптичкиот сигнал за различни концентра-ции и температури, со примена на осамениправоаголни електрични импулси, се до-биваат податоци за геометриските и еле-ктрооптичките параметри на полимеритево зависност од нивната структура [5].
Голем придонес во испитувањето на еле-ктрооптичките феномени има студирање-то на начинот на кој се појавува и губиелектро-оптичкиот ефект (ЕОЕ), т.е.ЕДП, при вклучување и исклучување наелектричното поле. Кога врз системот сеприменува правоаголен електричен импу-лс, со соодветно времетраење, на електро-оптичкиот сигнал (ЕОС) можат да се од-делат три области со различни оптичкикарактеристики [5]. Првата област е рас-тење (rise) на ЕОЕ со вклучување на поле-то до сатурационата област (steady-state) наЕОС. Втората област е сатурационата об-ласт, а третата област е опаѓање (decay) наЕОС и почнува од моментот на исклучува-ње на електричното поле, а трае до мо-ментот кога ЕОС е нула.
Времетраењето на електричниот импулстреба да биде поголемо од ориентационо-релаксационото време кое ја карактеризи-ра дезориентацијата и релаксацијата намолекулот. Од експерименталните резулта-ти е утврдено дека времетраењето на еле-ктричниот импулс треба да е неколку пати(до 10 пати) поголем од времето на дезори-ентација и релаксација на молекулите.
Co примена на правоаголни електричниимпулси, промената на ЕДП на светлина-та Дл (ѓ) во текот на времето t e определе-на со равенката [6]:
0)
каде што функцијата <р(т) го дава придоне-сот на ЕДП на светлината од молекули сорелаксационо време во подрачјето од гдот+dr.
За кривата на опаѓање на ЕОС (decay),функцијата /(/,т) е:
(2)
(3)
каде што т е времето на релаксација про-порционално на коефициентот на триењеW на молекулот при ротација околу осканормална на неговиот дипол, за даденатемпература Гна системот:
а за кривата на растење на ЕОС (rise):
Е-49
w2kT
(4)
Времето на релаксација т може да сеопредели од површините QD и QR , кои сеограничени со теориски криви од релации-те (2) и (3), соодветно:
_т _ W° 3 6кТ
• = т.0 ' (5)
3 З^Г ^D (6)
каде што т0 е време на слободна релакса-
ција [7]. Времето ц експериментално сепресметува од површината QD co која еопределена областа на опаѓање на ЕОЕ.
Од добиените податоци за растење и опа-ѓање на ЕОС и времето на слободна рела-ксација т0 на макромолекулите се опреде-
лува типот на електро-оптичкиот ефект(ориентационен или деформационен).
3. ЕКСПЕРИМЕНТ
Истражувањата на ЕОЕ и времето на ре-лаксација на макромолекулите од полиме-рот POD-2, во разредени раствори на DMFсе направени во зависност од температу-рата Т на системите, нивната концентра-ција с, како и од времетраењето tw и јачи-ната на применетото електрично поле Е?.Бидејќи растворите апсорбираат дел одупадната светлина, направени се корекциина ЕОЕ [3].
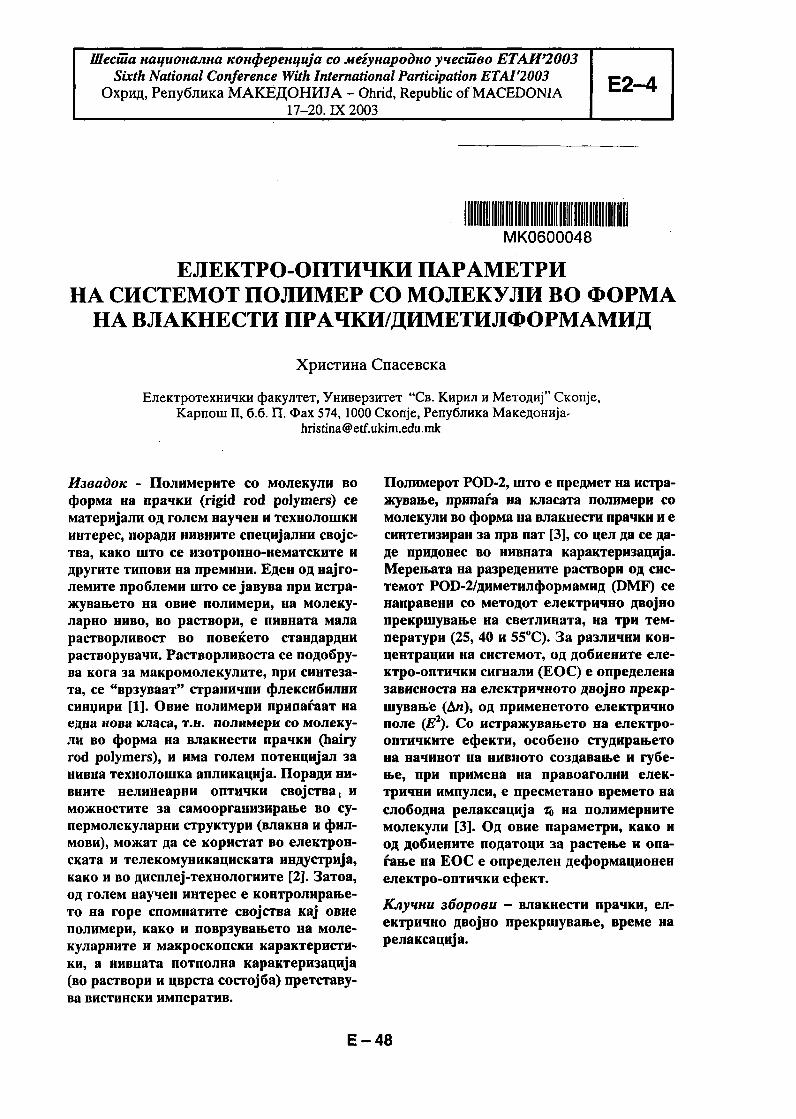
Принципна шема на апаратурата за мере-ње на ЕДП на светлината во лаборатори-јата за електро-оптика на дисперзни систе-ми, на Институтот за физика при ПМФ, едадена на сл.2.
3 4
Сл. 2. Шема на апаратурата за регистрирањена ЕОС: 1) Хе-Не ласер со л = 632,8 нм поставенпод агол 45 ° во однос на правецот на применето-то електрично поле; 2) Керр-ова кивета; 3) ели-птичен компензатор (АУ20-плочка); 4) анализа-тор поставен под агол -45 °; 5) фотомултипли-катор; 6) извор на еднонасочен напон со потен-циометар; 7) двоканален осцилоскоп; 8) право-
аголен импулсен генератор; 9) засилувач;10)сметач
Кегг-ова кивета е направена од метални(прохром) електроди со должина L = 7,45cm и растојание меѓу нив 0,2 cm. Метални-те електроди со тефлонски држачи се по-топуваат во кварцна кивета со раствор.
ЕОС се добиени применувајќи правоаголниелектрични импулси со време на дејствува-ње tw = 20, 50 и 100 џѕ. Напонот на приме-нетото електрично поле е во интервалотод 0 до 900 V.
Вредностите за ЕДП (An) ce добиваат спо-ред Brice-овиот метод [7] по релацијата:
~ ' " -Љ1, (7)
каде Го е константата на компензаторот,<Хг - агол во степени определен по приме-ната на електричниот импулс од калибра-ционата крива и <Х\ - агол во степени про-читан на скалата од компензаторот.
4. РЕЗУЛТАТИ И ДИСКУСИЈА
Друг начин за определување на типот наЕОЕ на системите е истражувањето наЕОС во зависност од времетраењето tw направоаголните електрични импулси, придадена јачината на електричното поле, ко-га температурата и концентрацијата на си-стемот се константни. Дел од испитуванитеефекти се прикажани co EOC на сл. 3 до 5.
Од снимките на ЕОС со мерење QD, т.е.времето на слободна релаксација на поли-мерните молекули to може да се утврди де-ка нивната вредност останува иста и не за-виси од tw. Toa наведува на заклучок дека,ЕОЕ на системот POD-2/DMF се деформа-циони, т.е полимерните молекули не посе-дуват перманентен диполен или идуциранкако резултат на применетото електричнополе.
—о.оо» 10.0«/ snai« ace
v«wg(I) not fcund
Сл. 3. EOC за раствор со концентрацијаc, = 4,6-10"3 ml g"1 на температура t = 25 °C,
E2 = 20-106(V m"1)2 и tw = 20 џѕ
E-50
- 0 . 0 0 « ЗО.ОИ/ tu зпаИЕ 1TDPr__ . _,_T---I.. -n ! TIT
not found
—O.OO» \t.O4/ Bu Snalg
<I> not found
Сл. 4. EOC за раствор со концентрацијаci = 4,6-10~3 ml g"1 на температура f = 25 °C,
Ѓ = 20-106 (V пГ1)2 и /H, = 100 цѕ
-o .oo . IOOH/ nv anane
i ! 1
....... j....,...j...,...,.j.,.,.,.,.
• • • : • • • : i - -
, , , .
l)s-53.47mV
Сл. 7. EOC за раствор со концентрацијаct = 4,6-10~3 ml g"1 на температура t = 40 °C,
E* = 2010*(V пГ1)2 и tw = 20 цѕ
-o.oo. B.oott/ ftv s n a l g
1 v ! ! • 1
not found
t
Сл. 5. EOC за раствор со концентрацијаc, = 4,6-10"3 ml g"1 на температура / =,25 °C,
E2 = 20-106 (V nf1)2 и tw = 500 цѕ
Зголемувањето на температурата на си-стемите има особено влијание врз ЕОЕ исе должи на топлинското движење ~ кТ [8]што доведува до намалување на ефектив-ната вредност на ЕДП, особено кога ста-нува збор за деформациони ефекти, тоа сегледа од ЕОС прикажани на сл. 6 до сл.8.Имено, при константна вредност на кон-центрацијата на системот, времето tw и ја-чината на применетото електрично полеЕ2, со зголемување на температурата ЕОСсе намалува.
L WO.OI
' ;
. . . . , ј . / . . . . ; . . . . .i . |
—O.OOl 10 Of ftu snaiff im
Сл. 6. EOC за раствор со концентрацијасА = 0,6-10"3 ml g"1 на температура t = 25 °С,
f2 = 20-10* (V m"1)2 и tv = 20 џѕ
Сл. 8. ЕОС за раствор со концентрацијасА = 4.610"3 ml g"1 на температура t = 55 °С,
iE2 = 20-106 (V т-1)2 и tw = 20 цѕ
ЕОЕ што се добиваат во разредените рас-твори, од полимерот POD-2 во DMF, се по-зитивни што се гледа и од ЕОС прикажа-ни погоре. Исто така и ЕОЕ на раствору-вачот е позитивен и е поголем од ЕОЕ насистемот POD-2/DMF [3]. Електричнотодвојно прекршување на светлината Длшто се должи само на макромолекулитеод полимерот РОЕ>-2 може да се пресметапо релацијата:
**" ^"раствор ^''растворувач • (8)
Бидејќи ЕДП на растворите, т.е. еле-ктричното двојно прекршување на светли-ната (Длр а с т в Ор), определено од релацијата(7), за сите системи е помал од ЕОЕ наDMF (ДЛрастворува,) [3], од релацијата (8)
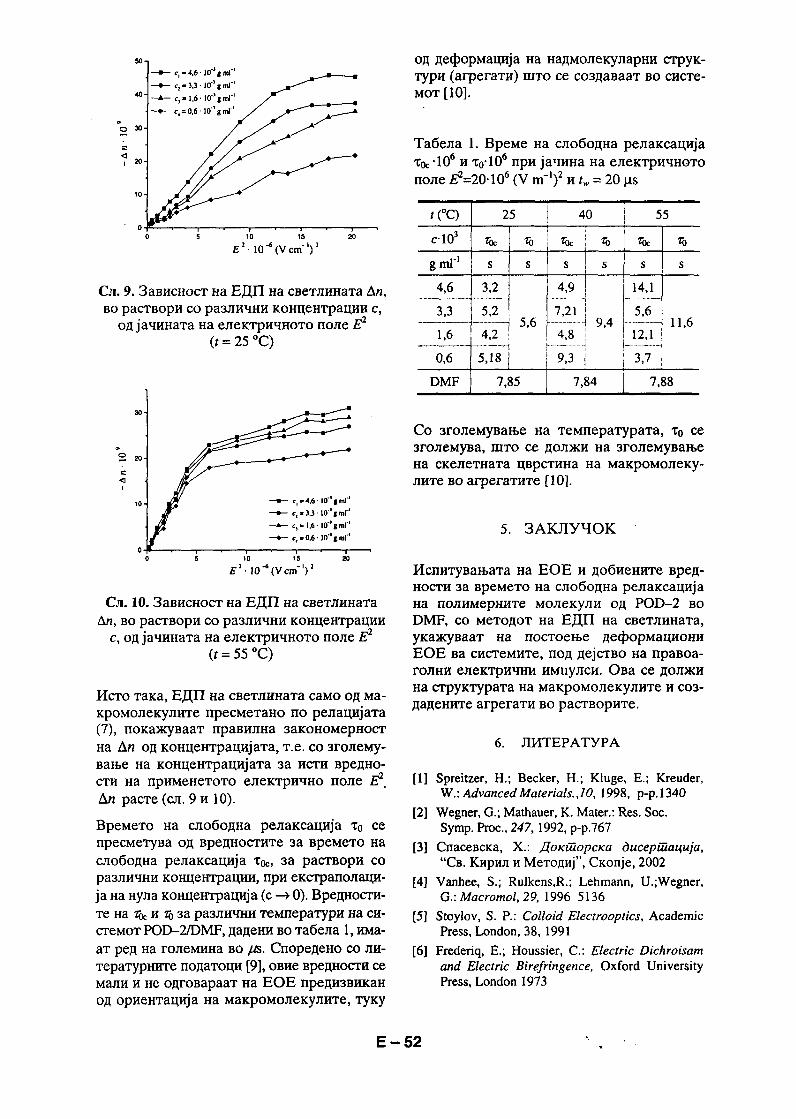
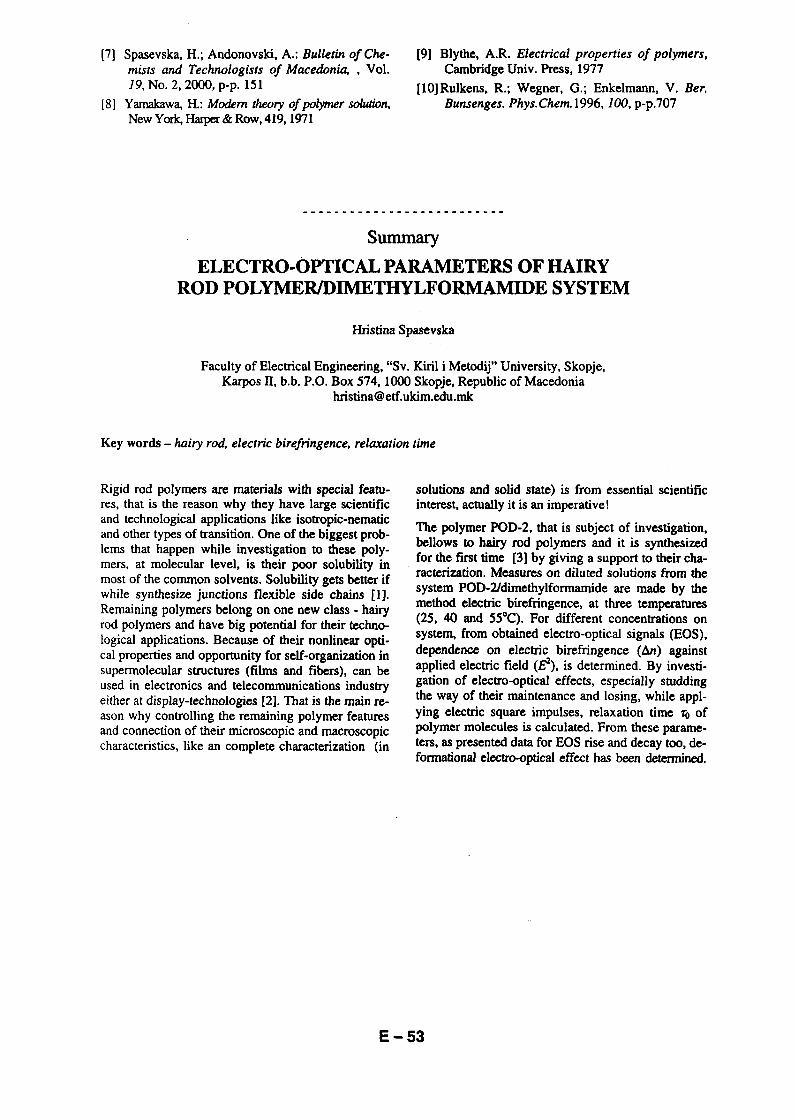
следува дека ЕОЕ на макромолекулите одполимерите POD-2 e негативен. Тоа сепотвдува и со фактот дека ЕОЕ се намалу-ва, наместо да се зголемува, со зголемува-ње на концентрацијата на растворите (сл.9 и сл. 10).
Е-51
о зо-
e
20-
0
• < r , - 4 . 6 J 0 j m l
Сл. 9. Зависност на ЕДП на светлината An,во раствори со различни концентрации с,
од јачината на електричното поле Е2
(г = 25 °С)
с<
'(Vcm'V
Сл. 10. Зависност на ЕДП на светлинатаAn, во раствори со различни концентрации
с, од јачината на електричното поле Е?(г = 55 °С)
Исто така, ЕДП на светлината само од ма-кромолекулите пресметано по релацијата(7), покажуваат правилна закономерностна An од концентрацијата, т.е. со зголему-вање на концентрацијата за исти вредно-сти на применетото електрично поле Е2,An расте (сл. 9 и 10).
Времето на слободна релаксација х0 сепресметува од вредностите за времето наслободна релаксација Тос, за раствори соразлични концентрации, при екстраполаци-ја на нула концентрација (с —> 0). Вредности-те на бс и to за различни температури на си-стемот POD-2/DMF, дадени во табела 1, има-ат ред на големина во џѕ. Споредено со ли-тературните податоци [9], овие вредности семали и не одговараат на ЕОЕ предизвиканод ориентација на макромолекулите, туку
од деформација на надмолекуларни струк-тури (агрегати) што се создаваат во систе-мот [10].
Табела 1. Време на слободна релаксацијаТос"1Об и То-106 при јачина на електричнотополе £г=2010б (V т"1)2 и tw = 20 џѕ
'(°С)
с-103
g m l 1
4,6
3,3
1,6
0,6
DMF
25
*bc
ѕ
3,2
5,2
4,2
5,18
ѕ
5,6
7,85
40
ѕ
to
ѕ
4,9 !
7,21
4,8
9,3
9,4
7,84
55
*bc
ѕ
14,1
5,6
12,1
3,7
ѕ
11,6
7,88
Co зголемување на температурата, т0 сезголемува, што се должи на зголемувањена скелетната цврстина на макромолеку-лите во агрегатите [10].
5. ЗАКЛУЧОК
Испитувањата на ЕОЕ и добиените вред-ности за времето на слободна релаксацијана полимерните молекули од POD-2 воDMF, со методот на ЕДП на светлината,укажуваат на постоење деформациониЕОЕ ва системите, под дејство на правоа-голни електрични импулси. Ова се должина структурата на макромолекулите и соз-дадените агрегати во растворите.
6. ЛИТЕРАТУРА
[1] Spreitzer, H.; Becker, H.; Kluge, E.; Kreuder,W.: Advanced Materials., 10, 1998, р-р.134О
[2] Wegner, G.; Mathauer, K. Mater.: Res. Soc.Symp. Proc., 247, 1992, p-p.767
[3] Спасевска, Х.: Докторска дисертација,"Св. Кирил и Методиј", Скопје, 2002
[4] Vanhee, S.; Rulkens.R.; Lehmann, U.;Wegner,G.: Macromol, 29, 1996 5136
[5] Stoylov, S. P.: Colloid Electrooptics. AcademicPress, London, 38, 1991
[6] Frederiq, E.; Houssier, C : Electric Dichroisamand Electric Birefringence, Oxford UniversityPress, London 1973
E-52
[7] Spasevska, H.; Andonovski, A.: Bulletin of Che-mists and Technologists of Macedonia, , Vol.19, No. 2,2000, p-p. 151
[8] Yamakawa, H.: Modem theory of polymer solution.New York, Harper & Row, 419,1971
[9] Blythe, A.R. Electrical properties of polymers,Cambridge Univ. Press, 1977
[lOJRulkens, R.; Wegner, G.; Enkelmann, V. Ber.Bunsenges. Phys.Chem.1996,100, p-p.707
Summary
ELECTRO-OPTICAL PARAMETERS OF HAIRYROD POLYMER/DIMETHYLFORMAMIDE SYSTEM
Hristina Spasevska
Faculty of Electrical Engineering, "Sv. Kiril i Metodij" University, Skopje,Karpos II, b.b. P.O. Box 574,1000 Skopje, Republic of Macedonia
Key words - hairy rod, electric birefringence, relaxation time
Rigid rod polymers are materials with special featu-res, that is the reason why they have large scientificand technological applications like isotropic-nematicand other types of transition. One of the biggest prob-lems that happen while investigation to these poly-mers, at molecular level, is their poor solubility inmost of the common solvents. Solubility gets better ifwhile synthesize junctions flexible side chains [1].Remaining polymers belong on one new class - hairyrod polymers and have big potential for their techno-logical applications. Because of their nonlinear opti-cal properties and opportunity for self-organization insupermolecular structures (films and fibers), can beused in electronics and telecommunications industryeither at display-technologies [2]. That is the main re-ason why controlling the remaining polymer featuresand connection of their microscopic and macroscopiccharacteristics, like an complete characterization (in
solutions and solid state) is from essential scientificinterest, actually it is an imperative!
The polymer POD-2, that is subject of investigation,bellows to hairy rod polymers and it is synthesizedfor the first time [3] by giving a support to their cha-racterization. Measures on diluted solutions from thesystem POD-2/dimethylformamide are made by themethod electric birefringence, at three temperatures(25, 40 and 55°C). For different concentrations onsystem, from obtained electro-optical signals (EOS),dependence on electric birefringence (Дл) againstapplied electric field (E2), is determined. By investi-gation of electro-optical effects, especially studdingthe way of their maintenance and losing, while appl-ying electric square impulses, relaxation time ZQ ofpolymer molecules is calculated. From these parame-ters, as presented data for EOS rise and decay too, de-formational electro-optical effect has been determined.
E-53
Шесша национална конференција со меѓународно учесшво ЕТАИ'2003Sixth National Conference With International Participation ЕТАГ2003
Охрид, Република МАКЕДОНИЈА - Ohrid, Republic of MACEDONIA17-20. IX 2003
MK0600049
MODERNIZATION OF ATOMIC ABSORPTIONSPECTROPHOTOMETER
Vi§a Tasic, Dragan Milivojevic, Dejan KarabaSevic
Copper Institute, Zeleni bulevar 35, 19210 Bor, Serbia and Montenegro,[email protected]
Abstract -- In Copper Institute in Bor, connectionhas been made between absorption spectropho-tometer and standard PC with the aim to make itsoperation more reliable and comfortable. Appliedsolution includes both software and hardwarecomponents. An I/O interface module has beeninstalled in PC [1]. Software component consistsof programs for measuring and interpretation ofresults. Paper presents details of this job realiza-tion.
Index terms — monitoring, measuring, pre-amplifier, I/O module
1. INTRODUCTION
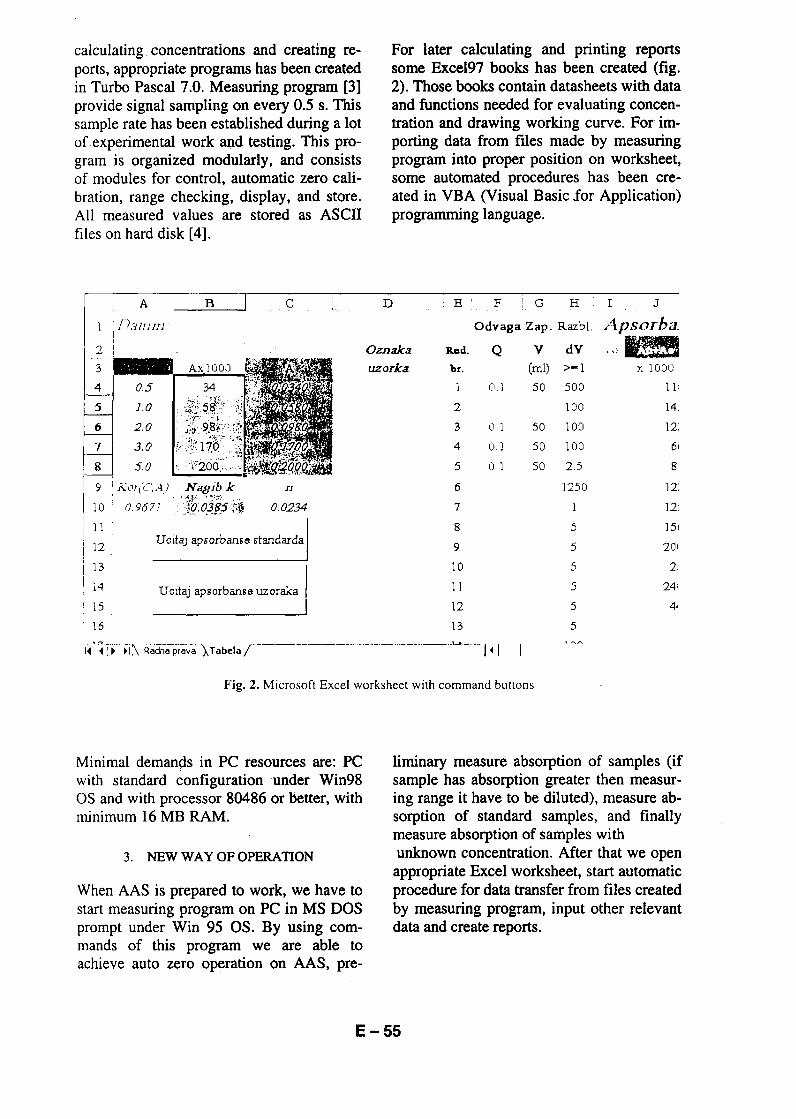
In Cooper Institute (Department for Chemi-cal and Technical Control) a few differentmodels of atomic absorption spectropho-tometer (AAS) are in everyday use. PerkinElmer made all those devices and most ofthem are partly microprocessor controlled.By use of AAS device (fig. 1) it can be de-temuned concentration of some metal ingiven samples. With the aim of concentra-tion determining first we have to form work-ing curve on the basis of the samples withknown concentration (those samples areknow4n as standards). On the basis of gen-erated working curve, measured values ofabsorption of samples, and including otherdata in calculation such as volume, diluteetc. finally we can determine concentration.Some of data needed for calculations haveto been read out from device display, andmanually stored for later use. To improve
and automate process of gathering and stor-ing of those data we produced proper hard-ware and software solutions.
2. HARDWARE AND SOFTWARE
Existing output signal from AAS to externalprinter has been used for data collecting onPC. As it signal is from range of 0-10 mV ithas to be amplified 1000 times for furtherprocessing. For that purpose we realisedpreamplifier with OP07 (this OP has lowoffset voltage, approximately 25 mV). OnPC I/O module signal first pass through am-plification section, latter on it comes to A/Dconverter assembly section (12 bit A/D con-verter AD678) [2]. As finally result of allconditioning, we got signal transformed todigital number from range 0-4095.
B wssmnam*.
« c t o •
Fig. 1 Atomic absorption spectrophotometerPerkin-Elmer model 2380 (front view)
To provide data collecting and storing,monitoring of measuring process on PC,
E-54
calculating concentrations and creating re-ports, appropriate programs has been createdin Turbo Pascal 7.0. Measuring program [3]provide signal sampling on every 0.5 s. Thissample rate has been established during a lotof experimental work and testing. This pro-gram is organized modularly, and consistsof modules for control, automatic zero cali-bration, range checking, display, and store.All measured values are stored as ASCIIfiles on hard disk [4].
For later calculating and printing reportssome Excel97 books has been created (fig.2). Those books contain datasheets with dataand functions needed for evaluating concen-tration and drawing working curve. For im-porting data from files made by measuringprogram into proper position on worksheet,some automated procedures has been cre-ated in VBA (Visual Basic for Application)programming language.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
И ^!
A B cDatum.
И В Н В Ax 1000 ЕЗЦ0.5
1.0
2.0
3.0
5.0
34
• Ш-ѕШ •$' • -••;?••• : ~ - ' • -•:
1 • J J l J f ' ' " ' O f l " ' . : i» :
шш
Kor(C,AJ Nagib k n
0.9671 ,0.0385^ 0.0234
Ucitaj apBorbanse standarda
Ucitaj apsorbanseuzoraka
• ;>l\ Radnaprava \Tabela/
\ D : Е
Oznaka. Red.
ШВ uzorka. bi.
Ж 2
ШШ| 3
§36
7
8
9
10
11
12
13
F
Odvaga
Q
0.1
0.1
0.1
0.1
hi I
G
Z a p .
V
(ml)
50
50
50
50
H
Razbl.
dV
> - l
500
100
100
100
2.5
1250
1
5
5
Ul
Ul
Ul
5
I ! J
Apsorbu.
x 1000
11
14
12
6
8
12
12
15
20'
2.
24'
4-
Fig. 2. Microsoft Excel worksheet with command buttons
Minimal demands in PC resources are: PCwith standard configuration under Win98OS and with processor 80486 or better, withminimum 16 MB RAM.
3. NEW WAY OF OPERATION
When AAS is prepared to work, we have tostart measuring program on PC in MS DOSprompt under Win 95 OS. By using com-mands of this program we are able toachieve auto zero operation on AAS, pre-
liminary measure absorption of samples (ifsample has absorption greater then measur-ing range it have to be diluted), measure ab-sorption of standard samples, and finallymeasure absorption of samples withunknown concentration. After that we open
appropriate Excel worksheet, start automaticprocedure for data transfer from files createdby measuring program, input other relevantdata and create reports.
E-55
QMiciosofl Excel-Pb НИЕЗE * !flew Insert Fojmet loots Qwrt №dow
! П
VJ • 1
0.200
§ 0.150
5, o.too •
ooso •
0.000
^ T i ! • i wISRadn» prav
2.000 4.000
У/
(400
X D »
8.000
J j l
IT
10.000
1
1
1
- • - NWrtno y
- > - R*cun»to j
12.000 ;
1
!Г"Г~" r~rU HWindowtCommandw3.50...||glMicto«ol> Eicd - Pb
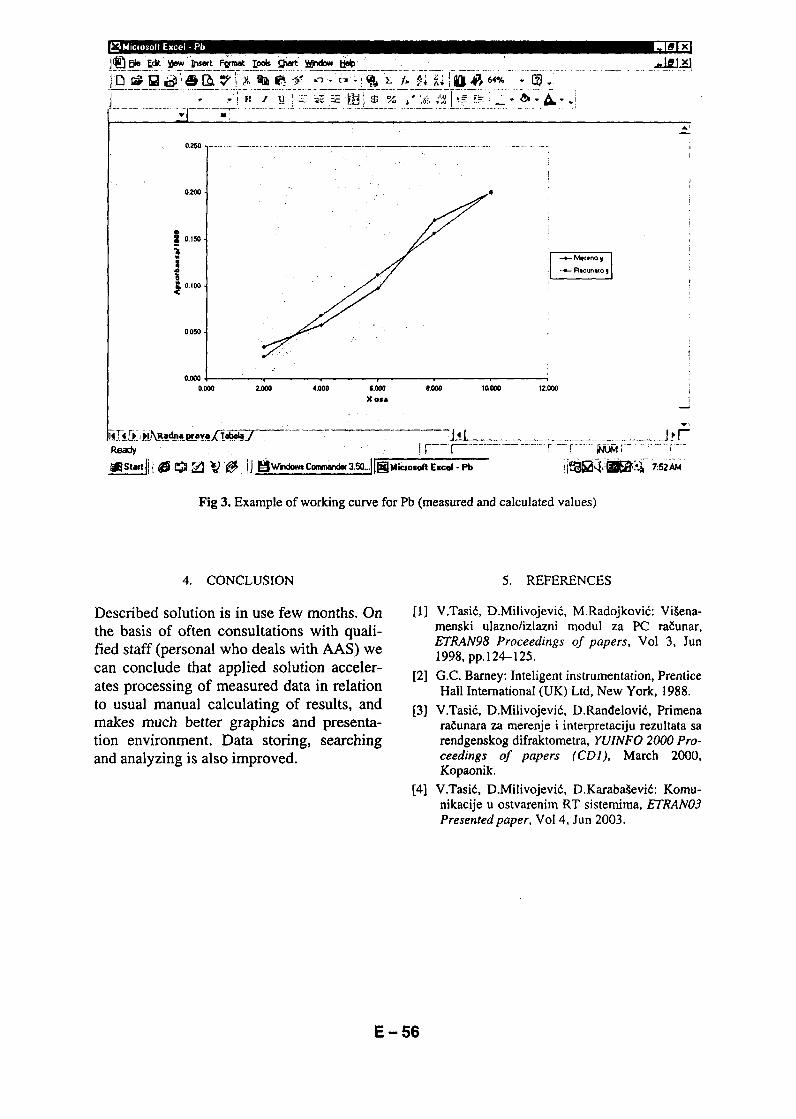
Fig 3. Example of working curve for Pb (measured and calculated values)
4. CONCLUSION
Described solution is in use few months. Onthe basis of often consultations with quali-fied staff (personal who deals with AAS) wecan conclude that applied solution acceler-ates processing of measured data in relationto usual manual calculating of results, andmakes much better graphics and presenta-tion environment. Data storing, searchingand analyzing is also improved.
5. REFERENCES
fl] V.Tasic, D.Milivojevic, M.Radojkovi6: ViSena-menski ulazno/izlazni modul za PC габипаг,ETRAN98 Proceedings of papers, Vol 3, Jun1998, pp. 124-125.
[2] G.C. Barney: Inteligent instrumentation, PrenticeHall International (UK) Ltd, New York, 1988.
[3] V.Tasic, D.Milivojevic, D.Randelovic, Primenara£unara za merenje i interpretaciju rezultata sarendgenskog difraktometra, YUINFO 2000 Pro-ceedings of papers (CD1), March 2000,Kopaonik.
[4] V.Tasic\ D.Milivojevic, D.KarabaJevic: Komu-nikacije u ostvarenim RT sistemima, ETRAN03Presented paper, Vol 4, Jun 2003.
E-56
Шесша национална конференција со меѓународно учесшво ЕТАИ'2003Sixth National Conference With International Participation ЕТАГ2003
Охрид, Република МАКЕДОНИЈА - Ohrid, Republic of MACEDONIA17-20. IX 2003
MK0600050
AN APPROACH FOR EXTRACTING THE VEINAND HEART BOUNDARIES FROM RAW NM IMAGES
Cvetko D. Mitrovski1, Mitko B. Rostov2
University St. Kliment Ohridski, Faculty of Technical Sciences, Bitola - Macedonia,'[email protected]; [email protected]
Abstract - In this paper we present our ap-proach on pre-processing chest region dy-namical NM images which enables anatomicaldata extraction of the vena cava and theheart. The aim of the method is developingsophisticated diagnostic software that couldautomatically offer the optimal positions andthe shapes of the regions of interest neededfor the heart studies.
Key words Nuclear medical image, medianfiltering, autocorrelation, histogram, denoising.
1. INTRODUCTION
Nuclear Medical (NM) images are diagnosticdigital images that present the projection of dis-tribution of radioisotopes in the body of a patientafter injecting adequate doses of radioisotopes.Accumulating the emitted gamma rays from apatient captures the raw NM images. The diag-nostic images could be captured either in sets(series of images recorded one after another), oras single frames, with predefined accumulationtime and resolution. In the first case, the imagesare called "dynamic", since their purpose is torecord the dynamics of the distribution of theradionuclide in the organs and tissues of a pa-tient, while the others are called "static", sincethey provide information about the static distri-bution of the radionuclide. Therefore, the "dy-namic" images usually have a much shorter ac-cumulation time and relatively lower energythan the "static" ones.
In the both cases, the images are very noisy dueto the nature of the gamma ray emission processand the operational characteristics of the gammacameras [1]. Therefore, a certain image pre-processing has to precede the NM images analy-sis, which should provide an accurate recogni-tion of anatomical data of the patient.
The conventional way of extracting anatomicalinformation from NM images is by summing upa certain number of sequential raw images. Inmany occurrences, this approach gives suffi-ciently good results, but in some situations, theobjects in the resultant image appear enlargedand deformed.
This paper presents our approach on pre-pro-cessing chest region dynamical NM images. Theaim of this approach is to determine anatomicaldata in order a future developed system to offerthe optimal position and the shape of the regionsof interest for heart and vein study without doc-tor's interaction.
The paper is organized as follows: Section 2shows the creating process of the dynamical NMimages, and formulates the problems due whichraw NM images should be pre-processed. InSection 3, we propose our approach for extract-ing the boundaries of the anatomical data in thechest region from a set of raw sequential images.Section 4 demonstrates the performance of theproposed approach applied on a set of real NMimages captured with our own upgrading gammacamera system. The conclusion and future re-search are discussed in Section 5.
E-69
2. NM IMAGE CREATION PROCESS
The process of generating the NM images startsafter injecting a small dose of radioactive mate-rial (for safety reasons) with a total quantity of
Q = (2)
q(t) is an injection flow of the radionuclide and
T is the total injection time. The injected ra-dionuclide starts to spread and generates somespace and time varying the radionuclide densityfunction (r.d.f.), p(x, v, z, t) > 0, into the body of
the patient (/ > 0; x, y, z e B, (B - body of thepatient)).
After injecting radioactive material in the patient(right hand) vein, the blood-radioactivity mix-ture passes through the heart and lungs, returnsto the heart and proceeds with spreading througheach cell of the patient's body through its arter-ies. This process could be recorded as a set of NNM images (Fig. 1):
Sr
k(iJ.tk,T), (3)
where r (power of 2, re (2 5, 26, 2 7, 28}) is theimage resolution index; i,j = l,2,...,r are indexes
of the image matrix that corresponds to a set of
rxr imaginary rectangular cells of the gamma
camera detector plane; tk is the beginning of
generating the image; r is the accumulation time.
Each image Sk(iJ,tt,T) (in further text Sk(tk,r)or Sk) is made up by counting the detectedgamma rays in the cells of the image matrix inthe interval [tk, г*+[] (tk+l = tk+x\ k = 1, 2, ... N; tx
= 0). This type of image usually has very a shortaccumulation time (r < 0.5) in order to recordthe fast spreading of radionuclide. Therefore, theaccumulated energy (counts) per image is verysmall. In addition, the images captured with ahigher resolution have a relatively lower level ofimage dynamics defined by
d[ = max(S; (i, j)) - min(S; (i, j))ij ij
(4)
Since the lowest pixel intensity is 0 for this typeof NM image, the image dynamics is defined by
Each NM image contains a rather high level ofnoise caused by: a) combining the radionuclidewith blood and the spreading of this mixture, b)hydrodynamic processes in the blood vesselsbecause of the pumping work of the heart and c)the randomness of the gamma rays emission andtheir detection by the gamma camera.
Taking this into considering, the raw imagesshould be adequately pre-processed in order toextract the anatomical information about the po-sition of the vena cava superior and the heart.
3. DYNAMICAL IMAGES PROCESSINGAND ANATOMICAL DATA
EXTRACTION
The process of spreading of the radionuclide af-ter its injection into the vein of a patient can bedivided into three consecutive phases [3]. Thefirst phase lasts while passing through the vein,the radionuclide comes to the heart; the secondone begins when it enters into the heart and pro-ceeds further towards the lungs, and the thirdone begins when the radionuclide starts return-ing to the heart, and proceeds spreading throughthe arteries towards each cell of the patient'sbody. The starting and ending point of eachphase can be determined accurately from thefunctions of some features of the image (imagedynamics, covering surface with nonzero inten-sity pixels) as described in [3].
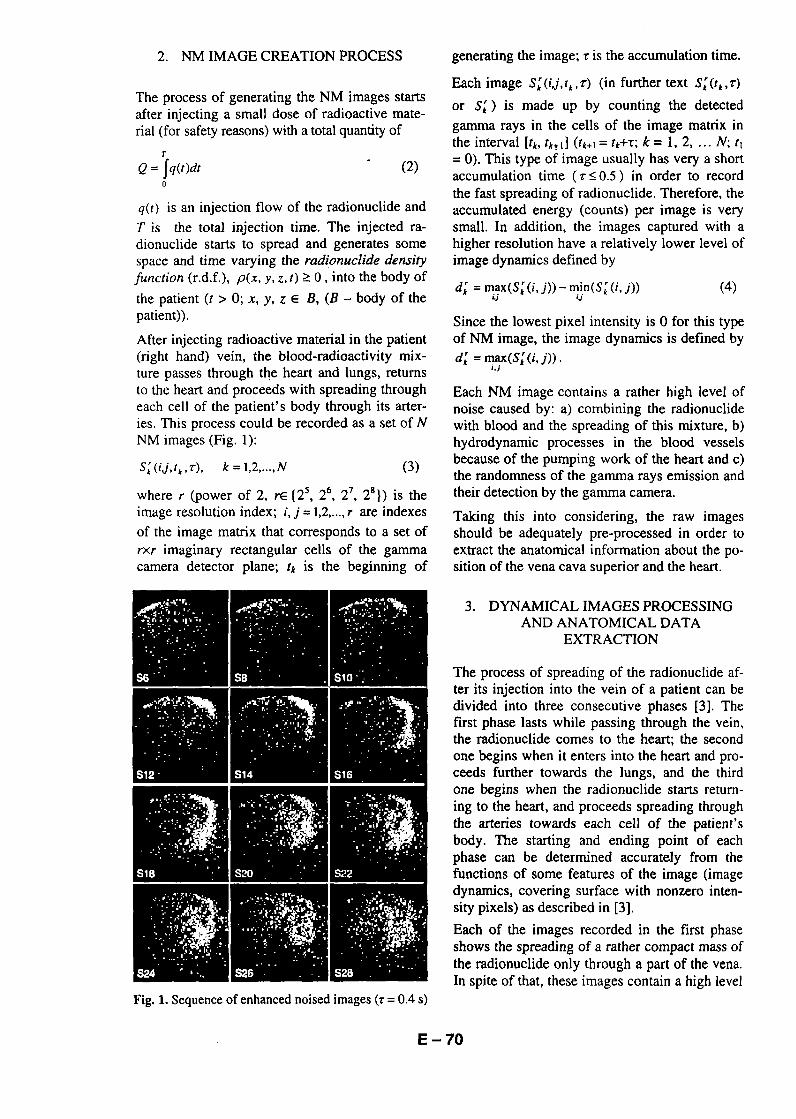
Each of the images recorded in the first phaseshows the spreading of a rather compact mass ofthe radionuclide only through a part of the vena.In spite of that, these images contain a high level
Fig. 1. Sequence of enhanced noised images (z = 0.4 s)
E-70

of spatially distributed noise in a form of iso-lated pixels in the neighborhood of the vein.
In the images recorded at the beginning of thesecond phase, the vein and the heart can be rec-ognized. Later, the vein disappears and only theheart remains. The projection of the heart in thisphase is the best, but its boundaries remainpoorly shaped due to the lower concentration ofthe radionuclide in it. In addition, the heart pul-sation causes some degrading effects to theshape of the heart. Hence, the classical filteringtechniques cannot be successfully applied on thewhole image.
In our approach, we divide the set of all NM im-ages in two subsets: a subset of images whereonly the vein appears (I phase) and a subset ofimages where the vein and the heart appear to-gether (II phase). Then we remove the vein seg-ment from the images of the second subset, anddecrease their resolution by half in order to re-duce the degradation. We apply a combinationof median filtering and a histogram modificationto all the images of the first subset and the re-maining heart segment in the images of the sec-ond subset. In order for the isolated pixels to beremoved from the images the median filtering isapplied. The main motivation for applying thistechnique is our assumption that the isolatedpixels are more likely to be a part of the noisethan to be a part of the image information. Inaddition, the median filtering could be replacedwith the autocorrelation filtering technique withthe same results as [3] and [4]. The purpose ofapplying the histogram modification is to reducethe width of shadow around the objects in theimages. Reducing first beans in the histogramsof the images, we remove a part of the noise.The algorithm is presented in Fig. 2.
Start
A.Lowpass filtering
Calculating histogram
A.Histogram modification
End
Fig. 2. Processing algorithm
Since the dynamical images are consecutive, itcan be expected that the successor and predeces-
sor of each image St contain certain information
about it. In order to include this part of informa-tion we use the following formula:
ЗДУ) = max 51 4(/.;), Sk(i,j), Ѕ'МЏЈ)}
(5)
where Sk = t//(St), and y/(-) is an image process-
ing function that corresponds to the aforemen-
tioned algorithm (Fig. 2). The same processing
techniques are applied to each image, S^, k = 1,
2,...,N(Fig.2,Eq.6).
We compose a resultant image by superposition of
the high-energy sub-images of Ske, (k = 1,2 N),
obtained by discarding those pixels of Su, which
intensity is below certain threshold (say 0.8-*/*).
The block diagram of the algorithm foranatomical data extraction is presented in Fig. 3.
Stan
X Reading images
Determining phases
Processing images fromthe first phase •••
Determining the vein
Sutxncting the vein inthe each image of the
second phase
Decreasing the resolutionof preprocessed images
of the second phase
( ••• Processing start J
Processing imagesobtained in the previous
step **»
Pre-processing
Ѕкл and 5, , images ->
Determining the heart
A.Obtaining an enhanced
image S^
Increasing the resolutionof the resultant image
with the heart
A.
k = k+\
Processing S
(a) (b)
Fig. 3. Anatomical data extraction algorithm
E-71
4. EXPERIMENTAL RESULTS
In this Section, we illustrate the effects of ourmethod and compare them with the results ob-tained by using the conventional approach. Bothmethods were applied on a same subset of 24sequential dynamic NM images from the phasesI and II, recorded with a resolution of 128x128and accumulation time x=0.4 [s].
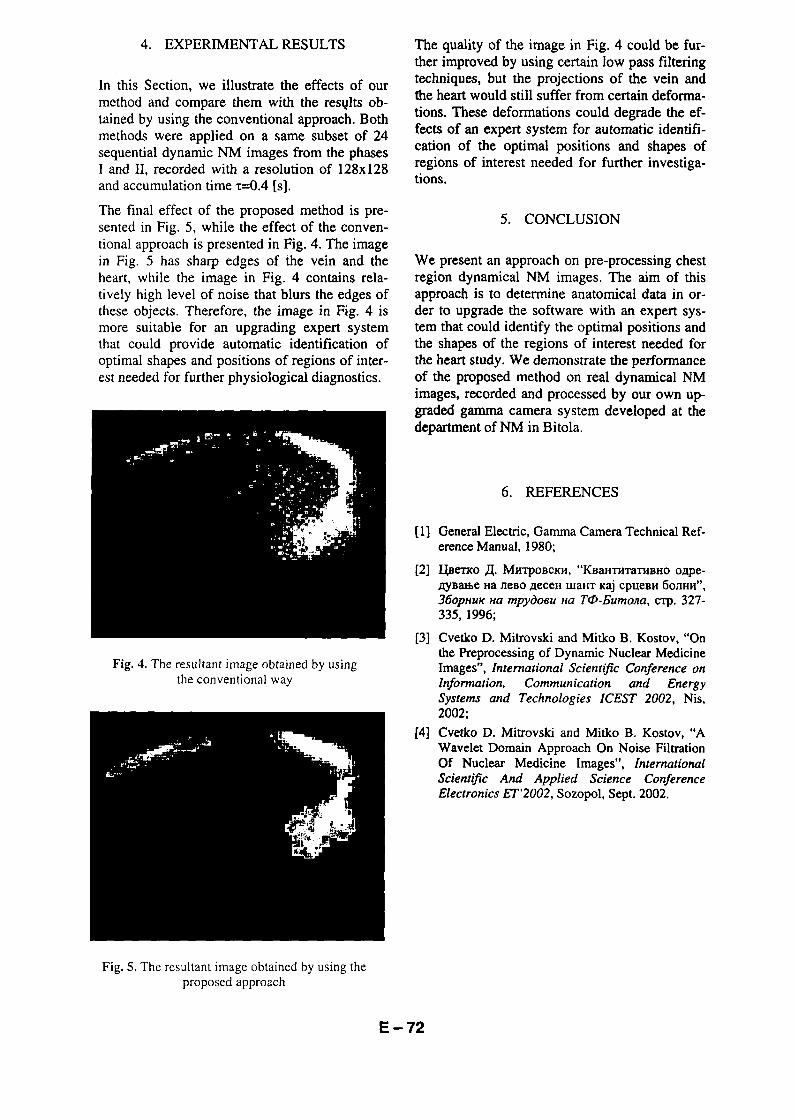
The final effect of the proposed method is pre-sented in Fig. 5, while the effect of the conven-tional approach is presented in Fig. 4. The imagein Fig. 5 has sharp edges of the vein and theheart, while the image in Fig. 4 contains rela-tively high level of noise that blurs the edges ofthese objects. Therefore, the image in Fig. 4 ismore suitable for an upgrading expert systemthat could provide automatic identification ofoptimal shapes and positions of regions of inter-est needed for further physiological diagnostics.
Fig. 4. The resultant image obtained by usingthe conventional way
The quality of the image in Fig. 4 could be fur-ther improved by using certain low pass filteringtechniques, but the projections of the vein andthe heart would still suffer from certain deforma-tions. These deformations could degrade the ef-fects of an expert system for automatic identifi-cation of the optimal positions and shapes ofregions of interest needed for further investiga-tions.
5. CONCLUSION
We present an approach on pre-processing chestregion dynamical NM images. The aim of thisapproach is to determine anatomical data in or-der to upgrade the software with an expert sys-tem that could identify the optimal positions andthe shapes of the regions of interest needed forthe heart study. We demonstrate the performanceof the proposed method on real dynamical NMimages, recorded and processed by our own up-graded gamma camera system developed at thedepartment of NM in Bitola.
6. REFERENCES
[1] General Electric, Gamma Camera Technical Ref-erence Manual, 1980;
[2] Цветко Д. Митровски, "Квантитативно одре-дување на лево десен шант кај срцеви болни",Зборник на трудови на ТФ-Битола, стр. 327-335, 1996;
[3] Cvetko D. Mitrovski and Mitko B. Rostov, "Onthe Preprocessing of Dynamic Nuclear MedicineImages", International Scientific Conference onInformation, Communication and EnergySystems and Technologies ICEST 2002, Nis,2002;
[4] Cvetko D. Mitrovski and Mitko B. Rostov, "AWavelet Domain Approach On Noise FiltrationOf Nuclear Medicine Images", InternationalScientific And Applied Science ConferenceElectronics ET'2002, Sozopol, Sept. 2002.
Fig. S. The resultant image obtained by using theproposed approach
E-72
Шесша национална конференција со меѓународно учесшво ЕТАИ'2003Sixth National Conference With International Participation ЕТАГ2003
Охрид, Република МАКЕДОНИЈА - Ohrid, Republic of MACEDONIA17-20.1X2003
MK0600051
ЕДНА МЕТОДА 3 A АНАЛИЗA HA BЛИЈАНИЕТОHA НИСКОФРЕКВЕНТНО ЕЛЕКТРОМАГНЕТНО
ПОЛЕ ВРЗ ЧОВЕКОТ
Лидија Ололоска1, Љубен Јанев2, Сузана Лошковска3
'Електротехнички факултет - Скопје, Карпош II, бб. 1000 Скопје,'[email protected]; [email protected]; [email protected]
Извадок - Во рамките на трудот изложенае една метода за анализа на влијанието нанискофреквентно електромагнетно полеврз човекот. При проучувањата на ова вли-јание, како основа е земено одредување наполе во нехомогени средини, делејќи јаструктурата што се анализира на регионисо хомоген материјал. Граничните површи-ни меѓу регионите се опишани со триагол-ници. При развивањето на техниката заодредување на електромагнетното поле,влијанието на останатите региони од ана-лизираната структура се еквивалентира соповршински електрични и магнетни струи.Елек-тромагнетното поле чие влијание врзчовекот са анализира, потекнува од еле-ктроенергетски вод. Добиените резултатиза електричното поле, може да се земат ка-ко основа за дискусија за биолошките ефе-кти кај човекот, од неговата изложеност наелектромагнетно поле.
Клучни зборови - електромагнетно поле,електромагнетни влијанија врз човекот,апроксимација на струи и полнежи
1. ВОВЕД
Во поново време од се поголем интерес епроучувањето на биолошките ефекти наелектромагнетното поле врз луѓето иистражувањата сврзани со истите, се со целодредување на низа параметри кои поната-му би се користеле за различни намени.
При анализата на влијанијата на електро-магнетните полиња, потребно е да се ре-шат неколку проблеми сврзани со методо-логијата на работа, како одредување на ва-лидни параметри за опишување на пробле-мот. Во однос на параметрите кои се бара-ат да се опише ефектот на електромагнет-ните полиња врз човекот, најчесто кори-стена величина е величината SAR [1,2], којапретставува нормализиран однос на еле-ктромагнетната енергија апсорбирана одтелото. Релевантни параметри за разгледу-вање се и параметрите како распределбатана електромагнетното поле, како и индуци-раните полнежи и струи во телото на чове-кот изложен на електромагнетно поле.
Во непосредна близина на индустрискитеуреди каде се јавуваат струи со голема јачи-
Е-79
на (од редот на десетина кА), како на при-мер електроенергетските водови, уреди зазаварување, технолошките уреди за топе-ње, и со тоа се извор на јако променливомагнетно поле, егзистираат електрично имагнетно поле. Во случај на присуство начовек кој се наоѓа во близина на истите,може да се појават струи индуцирани во не-говото тело, како резултат на интеракција-та на овие полиња и ткивата од телото. Запотполно да се анализираат импликациитепо здравјето на човекот, потребна е кван-титативен опис на таа итеракција. Пробле-мите кои тука се јавуваат потекнуваат одфактот дека човековото тело има многукомплексна геометриска структура и затоае многу тешко да се добие прецизен тео-ретски или експериментален опис на исто-то.
Исто така, при одредувањето на влијанија-та на електромагнетните полиња врз чове-кот, несомнено дека треба да се има пред-вид фактот дека ткивата се карактеризира-ат со свои електрични особини, кои зависатод фреквенцијата на електромагнетнотополе на кое е изложен.
Во рамките на овој труд, презентирана еразвиената постапка за одредување на ин-дуцираните струи, или пак ако барањате сетакви, за апсорбираната моќност во чове-ковото тело претставено со модел. Иститесе одредени за типичните вредности за еле-ктричното односно магнетното поле на коие изложен човекот од гореспомнатите уре-ди. Врз основа на овие амплитуди на прес-метаните индуцирани струи односно апсор-бираната моќност, може да се дискутира забиолошките ефекти од изложеноста наелектромагнетното поле.
лопипеди, при што е Јасно дека веродостоЈ-носта на прикажувањето на истото, ќе за-виси од димензиите на користените геоме-триски тела.
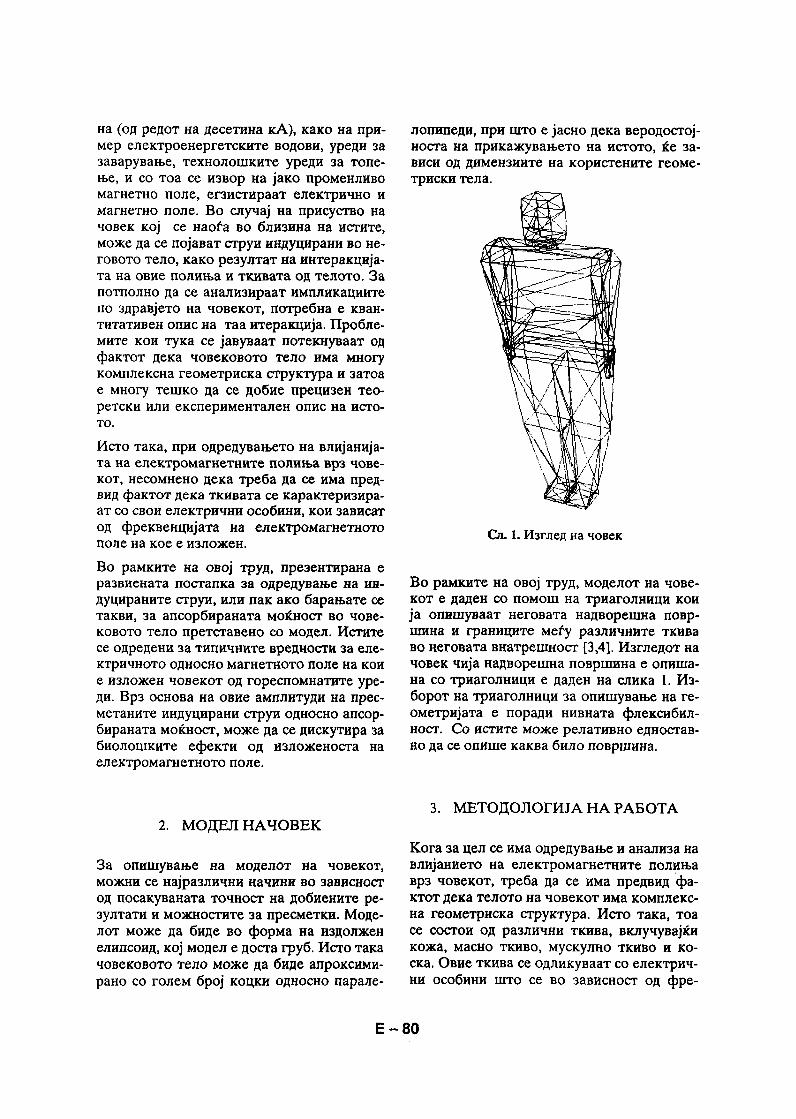
Сл. 1. Изглед на човек
Во рамките на овој труд, моделот на чове-кот е даден со помош на триаголници коија опишуваат неговата надворешна повр-шина и границите меѓу различните ткиваво неговата внатрешност [3,4]. Изгледот начовек чија надворешна површина е опиша-на со триаголници е даден на слика 1. Из-борот на триаголници за опишување на ге-ометријата е поради нивната флексибил-ност. Co истите може релативно едностав-но да се опише каква било површина.
2. МОДЕЛНАЧОВЕК
За опишување на моделот на човекот,можни се најразлични начини во зависностод посакуваната точност на добиените ре-зултати и можностите за пресметки. Моде-лот може да биде во форма на издолженелипсоид, кој модел е доста груб. Исто такачовековото тело може да биде апроксими-рано со голем број коцки односно парале-
3. МЕТОДОЛОГИЈА НА РАБОТА
Кога за цел се има одредување и анализа навлијанието на електромагнетните полињаврз човекот, треба да се има предвид фа-ктот дека телото на човекот има комплекс-на геометриска структура. Исто така, тоасе состои од различни ткива, вклучувајќикожа, масно ткиво, мускулно ткиво и ко-ска. Овие ткива се одликуваат со електрич-ни особини што се во зависност од фре-
Е-80

квенцијата на изложеното електромагнет-но поле. Анализирајќи го влијанието нанискофреквентното електро-магнетно по-ле врз човекот, треба да се имаат предвидособините на ткивата при тие фреквенции.
За да се проучат споменатите ефекти оделектромагнетното поле во човековото те-ло, кое има електрични особини различниод околниот простор, проблемот се сведувана одредување на поле во нехомогени сре-дини. Постапка која се среќава во литера-турата [5], се базира на еквивалентирањена влијанието на тело чии особини се раз-ликуваат од особините на' слободниот про-стор, со еквивалентна струја
(D
каде штоЈ е густината на споменатата струја,е е комплексната диелектрична констана-та на телото, aЕ е векторот на јачината на електричнотополе на набљудуваното место.Користејќи ја оваа постапка, во крајна ли-нија се одредува поле во хомоген простор,но потребно е да се одредат просторнораспределени струи.
Во случај да се анализираат структури, ка-ко што е човечкото тело, чија геометријане може да се опише на релативно едноста-вен начин, иако при тоа проблемот се све-дува на одредување поле во хомоген про-стор, потребни се обемни математичкипресметки, односно решавање системи одмногу висок ред. Заради тоа, избрано еструктурата што се анализира да се поделина региони исполнети со хомоген матери-јал. При анализата на полето во секој pern-cm се зема дека целиот простор е исполнетсо хомоген материјал со исти особини какорегионот кој се разгледува, а влијанието наостанатите региони се заменува со еле-ктрични и магнетни струи лоцирани на по-вршината со која се ограничува соодветни-от регион. Од граничните услови кои требада бидат исполнети на соодветната повр-шина, [6,7] следи
каде штоЈ, и Ј1т се густините на површински рас-пределените електрични и магнетни струи,п е векторот на наормалата на површина-та со која е ограничен набљудуваниот до-мен, a e насочена кон него, додека Е и Н с евекторите на јачините на електричното имагнетното поле на истото место.
Електричното и магнетното поле можат дасе изразат преку електричниот и магнетни-от вектор потенцијал со помош на релаци-ите [8]
1 - - 1 -- ј graddiv A - јшА rot F
coejt e_
- 1 - /H = — rotA — graddivF - jcoF
џ (oe/x
(4)
каде што
F = -£*- Ј /
7 e-Y r
•dS
(5)
(6)
J=iixH И J =-nxE (2)
ce електричниот и магнетниот вектор потенци-јал, додека е и џ се карактеристиките на мате-ријалот, у е константата на простирање вонего.
Co примена на горните изрази, се добиваатрелациите за одредување на еквивалентни-те електрични и магнетни струи.
При развивањето на дадената постапка, ед-но од основните барања кои се поставуваате истата да не е ограничена од геометрија-та на анализираната структура, од што сле-дува дека одредувањето на распределбатана површинските струи е проблем кој нематочно аналитичко решение. При постапка-та за нивно приближно решавање, густини-те на струите по површината на секој триа-голник може да се земат константни. Вто-ра можност е да се користат посебни апро-ксимации за струите и за полнежите.
Во рамките на анализата спроведена воовој труд, врз основа на [8], избрана е вто-
Е-81

рата можност, односно апроксимациЈа наструи и полнежи, при што е користена кон-стантна распределба на истите во доменотна секој триаголник со кој се опишува по-вршината. Основната задача во рамките наспроведената анализа е развивање техниказа одредување на полето, па вака дадениотмодел на човек сосема одговара на поста-вената задача.
4. ПРИМЕР
Како пример анализирано е влијанието наелектромагнетното поле од електроенер-гетски вод врз човек кој се наоѓа под исти-от. Положбата на човекот и водот е прет-ставена на сликата 2.
3 и 4, и тоа во еден попречен пресек воградниот кош, како и на еден надолженпресек на човекот. На дадените слики по-светлите нијанси претставуваат поле со по-голема вредност. Треба да се напомене де-ка светлите зони кои се јавуваат се резул-тат на грубата претстава на моделот.
оСл. 3. Попречен пресек
7,5 m
5,5 m
човек
Сл. 2. Положба на човек и вод
При тоа, се одредува електричното поле вочовекот ако низ водот тече струја од 1 кА.Одредено е полето од еквивалентните еле-ктрични и магнетни струи на површинатана човекот, како и електричното поле да-дено со
Е = јсоА - gradq) (7)
каде штоЕ е векторот на јачината на електричнотополеA e магнетниот вектор потенцијал, a<р е електричниот скалар потенцијал.
Дел од добиените резултати за електрич-ното поле во човекот се дадени на сликите
Сл. 4. Надолжен пресек
5. ЗАКЛУЧОК
Имајќи го предвид значењето на одредува-њето на влијанијата на електромагнетните
Е-82
полиња врз човекот воопшто, а посебно инискофреквентното електромагнетно no-ne, во рамките на изложениот труд е анали-зирано одредувањето на полето во самиотнего. При претставувањето на структуратана човекот, од гледна точка на електрични-те особини на ткивата, користена е постап-ка која граничните површини ги опишувасо низа од триаголници. Вака користенатапостапка нема посебни ограничувања вооднос на геометриските особини, на стру-ктурата што е јасно ако се имаат предвидособините на триаголникот како геометри-ска фигура. Моделот на човек опишан сотриаголници, кој во оваа апроксимација ерелативно груб, е повеќе од задоволителенза основната задача. Во нашиот случај, тоае развивање техника за одредување на по-лето.
Добиените резултати за електричното по-ле во човекот, односно апсорбираната моќ-ност, може да послужат како основа за ди-скусија за биолошките ефекти од изложе-носта на електромагнетното поле.
Користената техника овозможува анализана сложени структури, без посебни ограни-чувања во однос на нејзините геометрискиодносно електрични особини. Исто така,таа овозможува анализа на влијанието наелектромагнетно поле без ограничвање вооднос на неговата фреквенција.
6. ЛИТЕРАТУРА
[1] С. Polk, E. Postow, Handbook of Biological Ef-fects of Electromagnetic Fields, 2nd ed., CRCPress, 1996.
[2] National Research council. Possible Health effectsof exposure to residental electric and magnetic fi-elds, National Academy Press, 1997.
[3] Loskovska S., Ololoska-Gagoska L., Janev Lj.,"Monitoring Appearance of Electric DischargeInside Human Body by Integrated System forVisualization EMF Effects on Humans", APB-ME'2000, China, September 26-28 2000.
[4] N. Kakuta, S. Yokoyama, M. Nakamura, K. Ma-buchi, "Estimation of Radiative Heat TransferUsing a Geometric Human Model", IEEE Tran-saction on Biomedical Engineering, March 2001,Vol. 48(3), 324-331.
[5] M. N. O. Sadiku, "Numerical Tehniques in Elec-tromagnetics", CRC Press, 1992.
[6] M. N. Sadiku, Elements of Electromagnetics, Sa-unders College Publishing, 1994.
[7] J. Surutka, "Elektromagnetika", Gradjevinskaknjiga, Beograd, 1966.
[8] Љ. Јанев, Л. Ололоска, "Некои сознанијаод моделирањето на влијанијата на еле-ктромагнетните полиња врз човекот", ЗЕ-ОС 2002, Гевгелија, 20-21 декември 2002.
Summary
A METHOD FOR ANALYSING A LOW FREQUENCYELECTROMAGNETIC FIELD INFLUENCE ON HUMAN
Lidija Ololoska1, Ljuben Janev2, Suzana Loskovska3
'Faculty of Electrical Engineering - Skopje, Кагроѕ П, b.b.1000 Skopje,'[email protected]; [email protected]; [email protected]
Key words - Electromagnetic field, electromagnetic influence on human, approximation of current and charge.
In this paper, a method for analysis of a low frequencyelectromagnetic field influence on human is presented.During the studding this influence, a field determinati-
on in inhomogeneous material is taken as a basic, divi-ding the analysed structure on regions with homogene-ous material. The boundary surfaces between regions
E-83

are described with triangles. Developing the technique Electromagnetic field which influence is analysed , re-for electromagnetic field determination, the influence suits from transmission line. Obtained results for elec-from the other regions in analysed structure is equiva- trie field in human are basic for discussion for biologi-lented with surface electrical and magnetic currents. cal effects of electromagnetic field exposure.
E-84
Шесша национална конференција со меѓународно учесшво ЕТАИ'2003Sixth National Conference With International Participation ЕТАГ2003
Охрид, Република МАКЕДОНИЈА - Ohrid, Republic of MACEDONIA17-20. IX 2003
MK0600052
СИСТЕМИ 3A ДИГИТАЛНА ТЕЛЕМЕТРИJAИ ДАЛЕЧИНСКО УПРАВУВАЊЕ - ПРАКТИЧНА
ПРИМЕНА
Миле Ј. Станковски1, Татјана Колемишевска-Гугуловска1, Ратко Станојковски2
'Електротехнички факултет - Скопје, Карпош П, б.б. П. Фах 574, 91000 Скопје,f milestk.taniakgl @etf.ukim.edu.mk
2Министерство за Внатрешни работи, УВР Куманово, 11 Октомври бб, Куманово
Извадок -Трудов претставува обид за во-вед во практичните аспекти на применатана телеметријата и далечинското управу-вање со примена на современите придоби-вки на електрониката, обработката насигналите, телекомуникациите и секакотеоријата на автоматско управување. Да-ден е преглед на некои клучни појмовипри дизајн на систсми за телеметрија и да-лечинско управување. Исто така изложене еден систем за дигитална телеметрија замерење на ниво на четири резервоара коисе на различна локација.
Клучни зборови — телеметрија, далечин-ско управување, дигитален пренос на ин-формации, радио модем, мерење на ниво
1.ВОВЕД
Телеметријата се дефинира како детекти-рање и мерење на информацијата на неко-ја оддалечена локација и потоа трансмиси-ја на информацијата до централата илиглавната локација. Понатаму оваа инфор-мација може да биде искористена за мни-торинг или управување на процесот на ди-стантната локација. На тој начин, телеме-тријата може да се свати како далечинскомерење и аквизиција на податоците при-дружена со супервизија (надзор) и управу-вање на системите (SCADA) [2,3,6].Горнава дефиниција на телеметријата идалечинско управување имплицира некол-ку клучни работи кои мора да бидат земе-
ни во предвид при проектирање на систе-ми за далечинско мерење и управување:1. Сензорски дел за мерење, прилагодува-
ње и колектирање на сигналите,2. Комуникациски дел за пренос на сигна-
лите, (во еден правец при телеметријаили во двата правци при далечинскоуправување)
3. Централен или главен софтвер за ме-наџментот на системот, презентацијана податоците и евентуално управува-ње на оддалечениот систем.
Во следните три поглавја пооделно ке би-дат презентирани сите три дела на систе-мот за далечинско мерење и управување.Во петтото поглавје ке биде даден еденпример на далечинско мерење и управува-ње со резервоарите за вода во ВодоводКуманово, кои се дистрибуирани на чети-ри различни локации. На крајот е дадензаклучокот.
2. СЕНЗОРСКИ ДЕЛ ЗА МЕРЕЊЕ,ПРИЛАГОДУВАЊЕ И
КОЛЕКТИРАЊЕ НА СИГНАЛИТЕ
Изборот на сензорот е строго поврзан соприродата на процесот кој се набљудува ичија величина се мери и тој нема да бидеразгледуван во овој труд. Поинтересен еначинот на прибирање на податоците инивна подготовка за трансмисија.
Сензорот ја конвертира физичката вели-чина (т.е. температура, притисок, ниво,проток, влажност, проводност и др.), кои
i A - 1 1

го претставуваат мерниот сигнал по него-виот интензитет или фрекфенција во ши-рок опсег на вредности. Заради разноли-коста на мерните велимини и употребатана најразлични сензори уреди и системи,како и за стандардизација вообичаено еваквите електрични сигнали да се конвер-тираат во стандардни електрични сигнали.Уредите кои го обезбедуваат таквиотстандарден интерејс се нарекуваат транс-дусери, преобразувачи или кондиционерина сигнали. Стандардни електрични сигна-ли кои се употребуваат се: 4-20mA, 0-1V, 0-5V, 1-10V. Трансдусерите исто така честопати имаат можност за примарно препро-цесирање на сигналите.Сензорот и трансдусерот не се сеуште до-волни, бидејки понатамошното процеси-ра-ње и презентација на податоците во де-нешно време вклучува употреба на терми-нали, PLC-a и персонални компјутери коиработат со податоци во дигитална форма,подобро е сигналите да се конвертираатво дигитална форма. Најприкладен начинна конвертирање на сигналите е употребана таканаречени дистрибуирани Влез-но/Излезни модули со (мултиплексирани)аналогни влезови. Овие модули имаатвградено А/Д конвертор кој ги конверти-ра аналогните сигнали во дигитални пода-тоци со одредена резолуција и точност.Мултиплексирањето значи дека еден А/Дконвертор може да сервисира повеќе одеден аналогни канали.
Еден од доста битните факти кој треба дасе земе во предвид е напојувањето на да-лечинската станица. Доста чест случај е данемаме директно напојување на оддалече-ната локација. Овој проблем се решава собатериско напојување, акумулатори илисоларни панели. За да се минимизира по-трошувачката често пати станицата сестава во т.н. "sleep" режим [4,5]. Во овојмод станицата се наоѓа во претходно де-финиран интервал и комуникацијата јавоспоставува со централната локација са-мо во одреден момент.
3. КОМУНИКАЦИСКИ СИСТЕМ
Изборот на комуникацискиот потсистемза телеметриска мрежа може да има кру-цијално влијание на перформансите на си-стемот. Оптимално решение се постига вооднос на барањата во однос на времето наодзив како и тоа да системот не работи награницата на своите можности [1]. Преди-
мензионираните системи исто така не сенајсреќно решение: со употреба на WLANод 1Mb за пренос на 20 бита за податокотза ниво на вода двапати на ден е подоброотколку да се употребува хелихоптер зачитање на податокот. Подолу е даденпреглед на широкоупотребуваните теле-комуникациони системи при телеметријаи далечинско управување.
ЗЛ.РЅТИмрежи
PSTN (Personal System Telecomunication Net-work) телефонска мрежа се употребува запренос на податоци преку dial-up модемиинсталирани на секоја страна која е повр-зана во телеметрискиот систем. Ова реше-ние се применува само ако постои кабел-ска инфраструктура на оддалечената ло-кација, и ако системот за телеметрија неможе да работи во on-line мод, кој се барапри критичност на времето на одзив.
PSTN e прифатливо решение за периоди-чен мониторинг и детекција на аларми.Далечинските станици треба да се конфи-гурираат така да можат да воспостават вр-ска кога се сака да се трансмитира алар-мен услов кој е детектиран на далечинска-та локација.
Карактеристики:• Секоја трансмисија на податоци бара да
биде воспоставена телефонска врска• Глобалната мрежа дава екстензивна до-
верливост• Dial-up модемите обезбедуваат брзина на
пренос до 56Kb/s, но стварниот пренос замеѓуградска врска е до 14.4Kb/s.
• Употребата на постоечката инфраструк-тура имплицира ниска почетна цена.
• Цената на чинење е пропорционална навреметраењето на конекцијата.
3.2.Изнајмени линии
Изнајмените линии се наменети само заврска помеѓу далечинската станица и цен-тралниот систем. Станиците комуницира-ат преку модеми без бирање. Оваа е доброрешение за системи кои бараат брз одзивна далечинската станица. Карактеристики:• Системот е on-line цело време, нема по-
треба од воспоставување на конекција• Голема достапност• Може да се добие голема пропусност со
брзи модеми (на пр. DSL)• Експлоатационите трошоци се забеле-
жителни
А-12
З.З.Приватни мрежи
Може да бидат инсталирани приватнимрежи како комуникациони потсистемикои го подржуваат системот за телеметри-ја и далечинско управување. Овие мреживклучуваат:• LAN: Компјутерски локални мрежи
(LAN-Lokal arrea network) може додатнода бидат употребени за комуникација содалечнските станици при телеметрија идалечинско управување. Оваа решениепретпоставува да одалечениот I/O модулима Ethernet врска и подржува ТСРЛРпротокол или некој друг протокол кој секористи во LAN-овите.
• RS-485 магистрала: Ова е најуптребува-ната мрежа во индустриски апликации.RS-485 бара пар на упредени жици до си-те приклучени корисници. Таа е полу-дуплекс магистрала која подржува до 32модула поврзани на неа, и е наменета заработа за растојанија до 1.2кт. Постојатразлични индустриски протоколи дизај-нирани за RS-485 мрежи. Голема пред-ност на овие мрежи е нивната потполнанезависност. Меѓутоа, тие се наменетисамо за ограничени растојанија (на пр.Фабрика, погон и сл.)
3.4 Интернет
Во последните години, започна трендот заинтегрирани различно оддалечени уредиво големи системи поврзувајки ги прекуИнтернет. Интернет поврзувањето е на-правено со примена на т.н. ТСРЛР опрема.Ова отвора можности за прмена на Ин-тернетот како комуникациски потсистемво телеметријата и далечинското управу-вање. Придобивките добиени од овој фактсе евидентни: најпопуларната глобалнамрежа обезбедува широкоприменлива те-леметрија и управување на далечина одеден главен компјутер кој сега може дабиде било кој PC, може да набљудува по-датоците во оддалечената локација од би-ло кој претражувач. Друг концепт овозмо-жен преку TCP/IP протоколот може да ра-боти само при воспоставена кабловска ин-фраструктура како комуникациски си-стем, но сеуште користеји ги своите про-токоли вметнати во повисокото ISO/OSIнивоовски модел. Но сепак мора да се зе-мат во обзир и неговите недостатоци: Це-лосен пристап на Интернет чини пари а ивремето на одзив варира.
3.5 Безжичи комуникациски системи
Постојат неколку ситуации кога безжич-ните системи се оптимални решенија:• Недостапни места со кабелска инфра-
структура• Мобилни телеметриски станици• Телеметриски системи на привремени
експлоатациони постројки
Спротивно на жичаните медиуми, радиоканалите подлежат на интерференција,слабеење и шумови, кое имплицира при-мена на робусни комуникациски протоко-ли. За возврат безжичните системи лесноможе да ја конфигурираат својата тополо-гија. Безжичните комуникациски системикои можат да се искористат во телеметри-јата и далечинското управување се следни-те:
3.5.1 Безжичен LAN
WLAN е начин на конфигурирање на LANсо употреба на радио канал. Примарно тојбеше наменет за компјутерски мрежи. Тојго употребува IEEE 802.11 протокол иобезбедува 64Kbit/s до 1 IMbit/s на преминкое е премногу за телеметрија и далечин-ско управување. Комуникацијата се обаву-ва во таканаречениот ISM (Industrial, Scien-tific, Medicine) радио oncer (900MHz,2.4MHz, 5.7MHz), кои се слободни за кому-никација. Сеуште, максималната моќностна зрачење е ограничена на (100mW воЕвропа) со што е ограничен опсегот напримена (10Km co усмерена антена). Воо-бичаено работно растојание е во опсеготод неколку стотици метри.
3.5.2 GSM мрежи
Употребата на сервисот ЅМЅ и GPRSтрансфер на податоците кое го овозможу-ва GSM мрежите (мобилната телефонија)понекогаш може да биде корисен подси-стем за телеметрија и далечинско управу-вање. Но сеуште GSM провајдерите немо-жат да го покријат опсегот кој е од инте-рес. Покрај тоа, почетната цена на чинењее доста ниска, на пример, со употреба наполинг техника ке биде доста висока, би-дејки таа вклучува цена на секој направенповик.
3.5.3 Радио модеми
Радио модемите се досега најупотребува-ното решение за системите за телеметријаи далечинско управување. Тие ги користат
А-13
VHF и UHF каналите (12.5 или 25KHz ши-роки) за пренос на податоци. Таквите ра-дио канали ја прават телеметријата и да-лечинското управување високо независнаи доверлива. Сеуште, радио околината ба-ра имплементација на робусни комуника-циски протоколи кои ке го направат радиоканалот сигурен и доверлив. Така, моратранспарентно да разграничиме, асинхро-ниот пренос од синхрониот пакет прото-кол, кој вклучува ефикасна детекција нагрешка и алгоритам на корекција, како итехниката на адресирање и рутирање.Пропустот на оваа техника е ограничен на9600bit/s, но за поголем број на случаи ка-де се користи телеметрија и далечинскоуправување, оваа е повеќе од доволно.
4. ПРОТОКОЛИ
Следната важна работа која треба да сеимплементира на горните нивоа во систе-мот се протоколите. Влезно излезните мо-дули и централата мора да комуницираатна ист јазик, и за тоа се бара тие да имаатист стандард на fieldbus протоколот, освенкога се дизајнира сопствен ASCII прото-кол. Fieldbus e генеричко име дадено надигитален комуникациски протокол за ин-дустриски мерења и управувачки аплика-ции. Некои од нив се: Modbus, Fondation Fi-eldbus, CAN, Profibus, DirectNet. За жал непостои стандард над сите, но неколку моќ-ни производители дизајнираа сопственикои се обидуваат да ги стандардизираат.
Co воведувањето на TCP/IP во уредите,станува интересно да се имплементира fi-eldbus протоколот во TCP/IP. Концептот еда се пакуваат податоците во постоечкиотfieldbus формат и понатаму да се транспор-тира тој пакет во ТСРЛР. Во моментот по-стојат Modbus/TCP, EtherNet/TCP и Profibusна Етернет.
5. ЦЕНТРАЛЕН СОФТВЕР
Централен или главен софтвер е срцетона системите за телеметрија и далечинскоуправување. Тој е одговорен за:
• Воспоставување и завршување на конек-цијата
• Аквизиција на податоците во склад сопретходно дефинирана процедура,
• Процесирање на податоците и делувањеспрема добиените резултати,
• Специфични протокол комуникации• Човек-машина интерфејс• Процесирање на ирегуларни услови-
аларми• Управување на далечинскиот процес ако
треба,• Авторизиран пристап за користење на
повеќе пристапи
Организацијата на системот мора да бидесоодветна за актуелната апликација. Не-кои основни концепти се:• Централниот систем ја бира далечинска-
та станица во одредени интервали барај-ки свежи податоци. Неконектиран мод еприродна работа на системи од овој тип,бидејки неговата брзина е многу поголе-ма од времето на одзив. Оваа е добар из-бор кога треба да се трансферираат малброј на податоци.
• Далечинската станица се конфигуриратака да иницира трансфер на податоцикога се случува некој интересен меренрезултат (т.е. аларм, промена). Овде мо-же да се јави колизија, бидејки може дасе случи да во исто време се бара при-стап од повеќе далечински станици.
6. СИСТЕМ ЗА ТЕЛЕМТРИЈАИ ДАЛЕЧИНСКО УПРАВУВАЊЕ
CO ВОДОСНАБДИТЕЛЕН СИСТЕМНА КУМАНОВО
Во последниве неколку години во Репуб-лика Македонија во постојан тренд е осо-временување на системите за снабдувањесо вода на градовите. Доста инвестиции сеизградени во осовременувањето на опре-мата во доводните системи за вода како иво осовременување на опремата во фабри-ките за преработка на водата. Во тие рам-ки во последниве две години е спроведенпроект за подобрување на снабдувањетосо вода на градот Куманово. Градот Ку-маново се снабдува со вода за пиење од не-колку доводи: Главен вод од Липковскоезеро, помошен вод од Липковско езеро иБунари во с. Бедиње. Доводите со водавлегуваат во фабриката за преработка наводата, каде се врши третман на сироватавода. Преработената вода се дистрибуираниз градот преку четири помошни резер-воари, кои се на различни локации низградот. Доводите на вода од Липковскотоезеро се под природен пад, додека водата одбунарите во Бедиње се испумпува со пумпи.
А-14
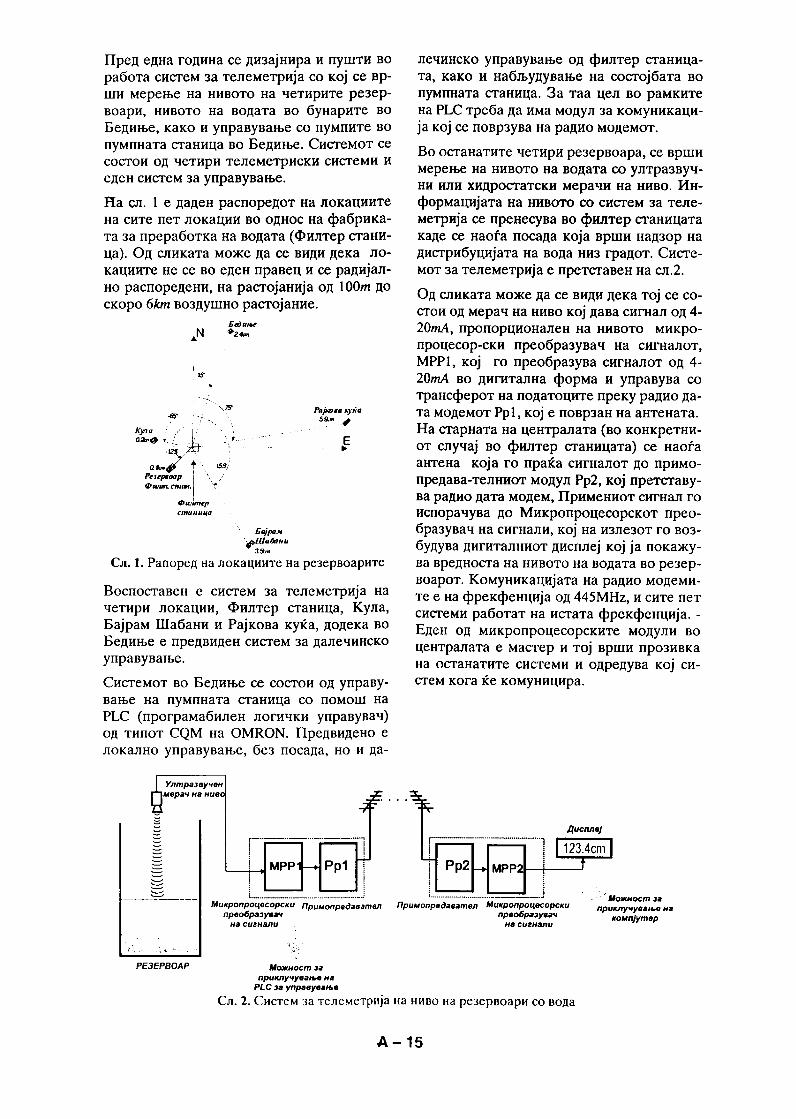
Пред една година се дизајнира и пушти воработа систем за телеметрија со кој се вр-ши мерење на нивото на четирите резер-воари, нивото на водата во бунарите воБедиње, како и управување со пумпите вопумпната станица во Бедиње. Системот сесостои од четири телеметриски системи иеден систем за управување.
На сл. 1 е даден распоредот на локациитена сите пет локации во однос на фабрика-та за преработка на водата (Филтер стани-ца). Од сликата може да се види дека ло-кациите не се во еден правец и се радијал-но распоредени, на растојанија од 100m доскоро бкт воздушно растојание.
BeduibeN •
Kyi aПЛЈ-Ф
Peieptoap
Рајкоша муќа
Е
Фиѕиперстаниџа
Бајрам
Сл. 1. Рапоред на локациите на резервоарите
Воспоставен е систем за телеметрија начетири локации, Филтер станица, Кула,Бајрам Шабани и Рајкова куќа, додека воБедиње е предвиден систем за далечинскоуправување.
Системот во Бедиње се состои од управу-вање на пумпната станица со помош наPLC (програмабилен логички управувач)од типот CQM на OMRON. Предвидено елокално управување, без посада, но и да-
лечинско управување од филтер станица-та, како и набљудување на состојбата вопумпната станица. За таа цел во рамкитена PLC треба да има модул за комуникаци-ја кој се поврзува на радио модемот.
Во останатите четири резервоара, се вршимерење на нивото на водата со ултразвуч-ни или хидростатски мерачи на ниво. Ин-формацијата на нивото со систем за теле-метрија се пренесува во филтер станицатакаде се наоѓа посада која врши надзор надистрибуцијата на вода низ градот. Систе-мот за телеметрија е претставен на сл.2.
Од сликата може да се види дека тој се со-стои од мерач на ниво кој дава сигнал од 4-20тА, пропорционален на нивото микро-процесор-ски преобразувач на сигналот,MPP1, кој го преобразува сигналот од 4-20mA во дигитална форма и управува сотрансферот на податоците преку радио да-та модемот Ppl, кој е поврзан на антената.На старната на централата (во конкретни-от случај во филтер станицата) се наоѓаантена која го праќа сигналот до примо-предава-телниот модул Рр2, кој претставу-ва радио дата модем, Примениот сигнал гоиспорачува до Микропроцесорскот прео-бразувач на сигнали, кој на излезот го воз-будува дигиталниот дисплеј кој ја покажу-ва вредноста на нивото на водата во резер-воарот. Комуникацијата на радио модеми-те е на фрекфенција од 445MHz, и сите петсистеми работат на истата фрекфенција. -Еден од микропроцесорските модули воцентралата е мастер и тој врши прозивкана останатите системи и одредува кој си-стем кога ќе комуницира.
I УптразвучвнЅмерач на ниво
МРР1 Рр1
i.
Рр2 МРР2
Дисплвј
123.4cm |
РЕЗЕРВОАР
Микропроцесорски Примопрвдавзтел Прииопредавател Микропроцесорскипрвобразувач преобразувач
на сигнали ., на сигнали
Можност 13приклучување на
PLC за управување
Сл. 2. Систем за телеметрија на ниво на резервоари со вода
Можност заприклучуваља на
коип/утер
А-15
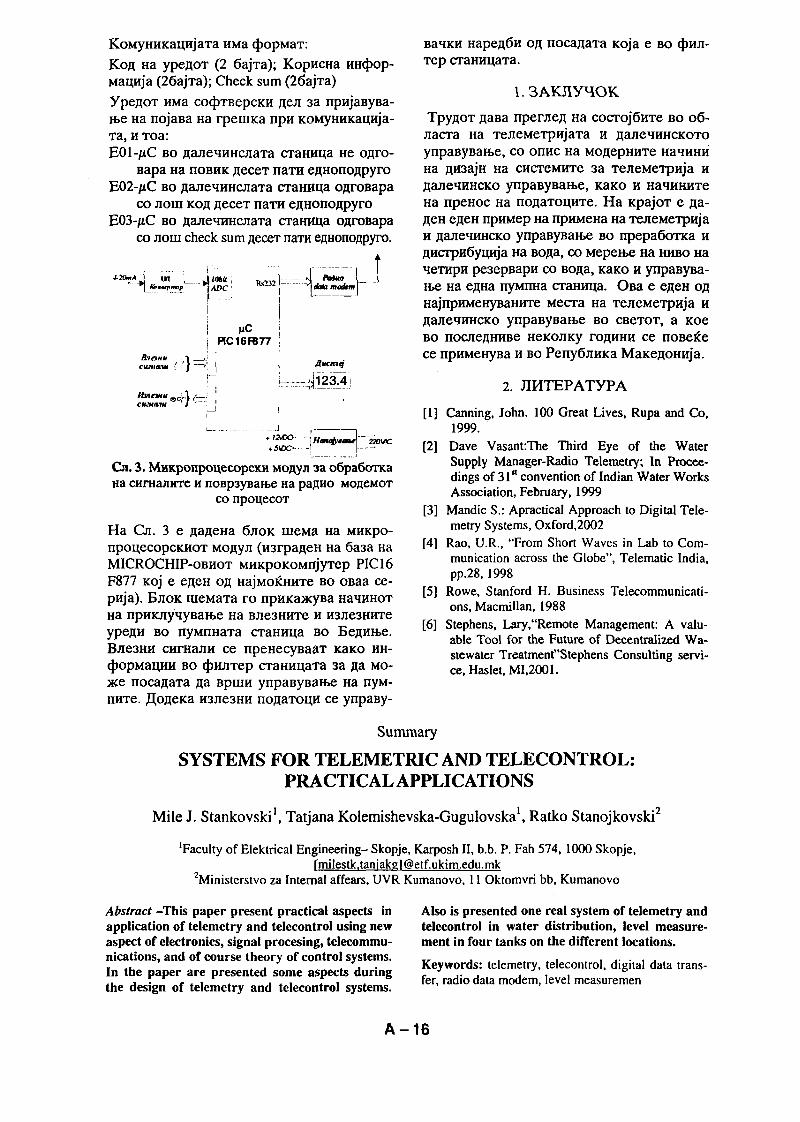
Комуникацијата има формат:Код на уредот (2 бајта); Корисна инфор-мација (2бајта); Check sum (2бајта)
Уредот има софтверски дел за пријавува-н>е на појава на грешка при комуникација-та, и тоа:EQl-џС во далечинслата станица не одго-
вара на повик десет пати едноподругоЕ02-дС во далечинслата станица одговара
со лош код десет пати едноподругоЕ03-/хС во далечинслата станица одговара
со лош check sum десет пати едноподруго.
, _ I •• "
Ј-20тЛ\ ш I Л1Ш\ Paiuot
Riaiiu \
сшнали • If
Њлежи ^ О Дсимап ' Ј
j PIC16FB77
,t...
- - ! |
: • " !
' . - -, I
Дислкј
• 1ЛОО- -н• 54ОС--- -Г ггоис
Сл. З. Микропроцесорски модул за обработкана сигналите и поврзување на радио модемот
со процесот
На Сл. 3 е дадена блок шема на микро-процесорскиот модул (изграден на база наMICROCHIP-овиот микрокомпјутер PIC16F877 кој е еден од најмоќните во оваа се-рија). Блок шемата го прикажува начинотна приклучување на влезните и излезнитеуреди во пумпната станица во Бедиње.Влезни сигнали се пренесуваат како ин-формации во филтер станицата за да мо-же посадата да врши управување на пум-пите. Додека излезни податоци се управу-
вачки наредби од посадата која е во фил-тер станицата.
1.3АКЛУЧОК
Трудот дава преглед на состојбите во об-ласта на телеметријата и далечинскотоуправување, со опис на модерните начинина дизајн на системите за телеметрија идалечинско управување, како и начинитена пренос на податоците. На крајот е да-ден еден пример на примена на телеметријаи далечинско управување во преработка идистрибуција на вода, со мерење на ниво начетири резервари со вода, како и управува-ње на една пумпна станица. Ова е еден однајприменуваните места на телеметрија идалечинско управување во светот, а коево последниве неколку години се повеќесе применува и во Република Македонија.
2. ЛИТЕРАТУРА
[1] Canning, John. 100 Great Lives, Rupa and Co,1999.
[2] Dave Vasant:The Third Eye of the WaterSupply Manager-Radio Telemetry; In Procee-dings of 31" convention of Indian Water WorksAssociation, February, 1999
[3] Mandic S.: Apractical Approach to Digital Tele-metry Systems, Oxford,2002
[4] Rao, U.R., "From Short Waves in Lab to Com-munication across the Globe", Telematic India,pp.28, 1998
[5] Rowe, Stanford H. Business Telecommunicati-ons, Macmillan, 1988
[6] Stephens, Lary,"Remote Management: A valu-able Tool for the Future of Decentralized Wa-stewaler TreatmenfStephens Consulting servi-ce, Haslet, MI.2001.
Summary
SYSTEMS FOR TELEMETRIC AND TELECONTROL:PRACTICAL APPLICATIONS
Mile J. Stankovski1, Tatjana Kolemishevska-Gugulovska1, Ratko Stanojkovski2
'Faculty of Elektrical Engineering- Skopje, Karposh II, b.b. P. Fah 574, 1000 Skopje,[email protected]
2Ministerstvo za Internal affears, UVR Kumanovo, 11 Oktomvri bb, Kumanovo
Abstract -This paper present practical aspects inapplication of telemetry and telecontrol using newaspect of electronics, signal procesing, telecommu-nications, and of course theory of control systems.In the paper are presented some aspects duringthe design of telemetry and telecontrol systems.
Also is presented one real system of telemetry andtelecontrol in water distribution, level measure-ment in four tanks on the different locations.
Keywords: telemetry, telecontrol, digital data trans-fer, radio data modem, level measuremen
A-16

Шесша национална конференција со меѓународно учесшво ЕТАИ'2003Sixth National Conference With International Participation ЕТАГ2003
Охрид, Република МАКЕДОНИЈА - Ohrid, Republic of MACEDONIA17-20. IX 2003
MK0600053
NETWORK SCADA SYSTEM
Dragan R. Milivojevic, Vi§a Tasic, Dejan KarabaSevic
Copper Institute Bor, Zeleni bulevar 35, Serbia and Montenegro, [email protected]
Abstract - Copper Institute, Industrial In-formatics department, is developing and ap-plying network real time process monitoringand control systems/Some of these systemsare already in use. The paper presents somehardware and software general remarks andperformances, with special regard to commu-nication sub-systems and network possibili-ties.
Index terms— Real Time, Process Control,Network
1. INTRODUCTION
In practical works realised so far of applicationof monitoring and control systems for techno-logical processes in some of production units ofMining & Smelting Complex Bor, where remotesystem units had to be connected, the solution ofnetwork infrastructure has always been facedwith a basic problem. In spite of the fact that forcommunication channels telephone line connec-tions have been selected, which represents theleast expensive solution in urbane environment,it is frequently very difficult to provide at leastone communication line for each device (net-work node). It must be stressed that in this caseleased lines are necessary, since the system in-volves the prmanent real time process operation.,which practically is not possible to realise withcommuted lines. Systems already developed andin use, correspond to these requirements to alarge extent, but they have certain deficiencies,which required introduction of some improve-ments.
To meet the basic requirement - operation innetwork environment in real time, with satisfac-tion of imposed limitations: impossibility to pro-vide leased telephone lines from the center toeach of system units, development works havebeen undertaken and synthesis performed forspecific network structure. In designing proce-dure, hierarchical organisation of network man-agement has been adopted, and topographic formhas been dictated by practical requirements inthe concrete application.
2. HARDWARE BASIS
To gain the proper insight into the picture aboutthe requirements to be satisfied and about per-formances of realised network, it is useful first topresent basic characteristics of nodes in the net-work and the manner of their operation.
Considering that here a system is envolved formonitoring and control of technological proc-esses, the basis of the system represents one ormore industrial automatic devices (PLC, DataLogger etc.). For interaction with the process (tocheck actual state of parameters and exert theaction on the process- remote control) a classicalPC is used. This means that the simplest networkcontains one PLC and one PC. In a general case,for "distributed" processes a large number ofPLCs are required to perform measurement ofprocess parameters, their control and transfer tothe host computer (PC). In local control, accord-ing to a pre-set algorithm, PLC generates motorsignals and transfers them to executive devicesfor intervention on the flow of technologicalprocess [1]. Independently from the fact whether
A-17
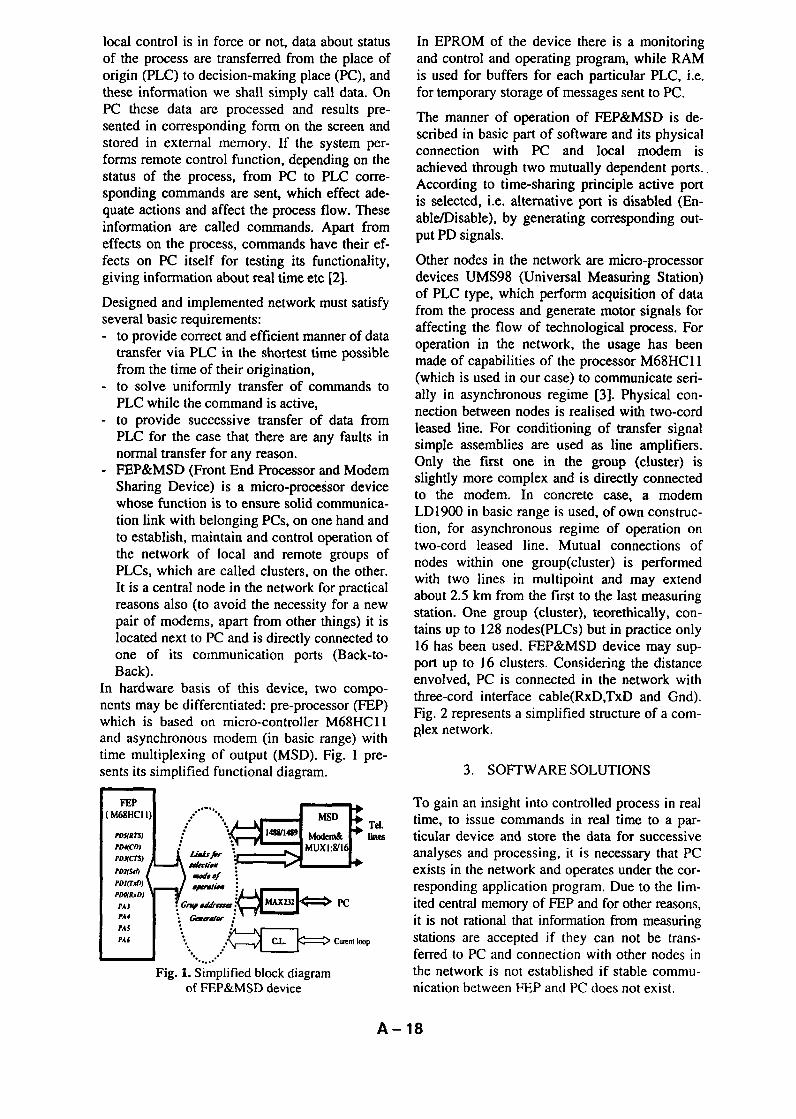
local control is in force or not, data about statusof the process are transferred from the place oforigin (PLC) to decision-making place (PC), andthese information we shall simply call data. OnPC these data are processed and results pre-sented in corresponding form on the screen andstored in external memory. If the system per-forms remote control function, depending on thestatus of the process, from PC to PLC corre-sponding commands are sent, which effect ade-quate actions and affect the process flow. Theseinformation are called commands. Apart fromeffects on the process, commands have their ef-fects on PC itself for testing its functionality,giving information about real time etc [2].
Designed and implemented network must satisfyseveral basic requirements:- to provide correct and efficient manner of data
transfer via PLC in the shortest time possiblefrom the time of their origination,
- to solve uniformly transfer of commands toPLC while the command is active,
- to provide successive transfer of data fromPLC for the case that there are any faults innormal transfer for any reason.
- FEP&MSD (Front End Processor and ModemSharing Device) is a micro-processor devicewhose function is to ensure solid communica-tion link with belonging PCs, on one hand andto establish, maintain and control operation ofthe network of local and remote groups ofPLCs, which are called clusters, on the other.It is a central node in the network for practicalreasons also (to avoid the necessity for a newpair of modems, apart from other things) it islocated next to PC and is directly connected toone of its communication ports (Back-to-Back).
In hardware basis of this device, two compo-nents may be differentiated: pre-processor (FEP)which is based on micro-controller M68HC11and asynchronous modem (in basic range) withtime multiplexing of output (MSD). Fig. 1 pre-sents its simplified functional diagram.
FEP(M68HCI1)
ГОЈѓСТО
FD2(Stt)
fDICTxD) \
ГА4
Ш
i Umisjbr :.— J \ ѕЛсИаж *
\ mode/«/ upmtiM
iGnp ajjressa\ Gauratar
MSD
Modem&Tel.lines
Curcni loop
Fig. 1. Simplified block diagramof FEP&MSD device
In EPROM of the device there is a monitoringand control and operating program, while RAMis used for buffers for each particular PLC, i.e.for temporary storage of messages sent to PC.
The manner of operation of FEP&MSD is de-scribed in basic part of software and its physicalconnection with PC and local modem isachieved through two mutually dependent ports.According to time-sharing principle active portis selected, i.e. alternative port is disabled (En-able/Disable), by generating corresponding out-put PD signals.
Other nodes in the network are micro-processordevices UMS98 (Universal Measuring Station)of PLC type, which perform acquisition of datafrom the process and generate motor signals foraffecting the flow of technological process. Foroperation in the network, the usage has beenmade of capabilities of the processor M68HC11(which is used in our case) to communicate seri-ally in asynchronous regime [3]. Physical con-nection between nodes is realised with two-cordleased line. For conditioning of transfer signalsimple assemblies are used as line amplifiers.Only the first one in the group (cluster) isslightly more complex and is directly connectedto the modem. In concrete case, a modemLD1900 in basic range is used, of own construc-tion, for asynchronous regime of operation ontwo-cord leased line. Mutual connections ofnodes within one group(cluster) is performedwith two lines in multipoint and may extendabout 2.5 km from the first to the last measuringstation. One group (cluster), teorethically, con-tains up to 128 nodes(PLCs) but in practice only16 has been used. FEP&MSD device may sup-port up to 16 clusters. Considering the distanceenvolved, PC is connected in the network withthree-cord interface cabIe(RxD,TxD and Gnd).Fig. 2 represents a simplified structure of a com-Rlex network.
3. SOFTWARE SOLUTIONS
To gain an insight into controlled process in realtime, to issue commands in real time to a par-ticular device and store the data for successiveanalyses and processing, it is necessary that PCexists in the network and operates under the cor-responding application program. Due to the lim-ited central memory of FEP and for other reasons,it is not rational that information from measuringstations are accepted if they can not be trans-ferred to PC and connection with other nodes inthe network is not established if stable commu-nication between FEP and PC does not exist.
A-18
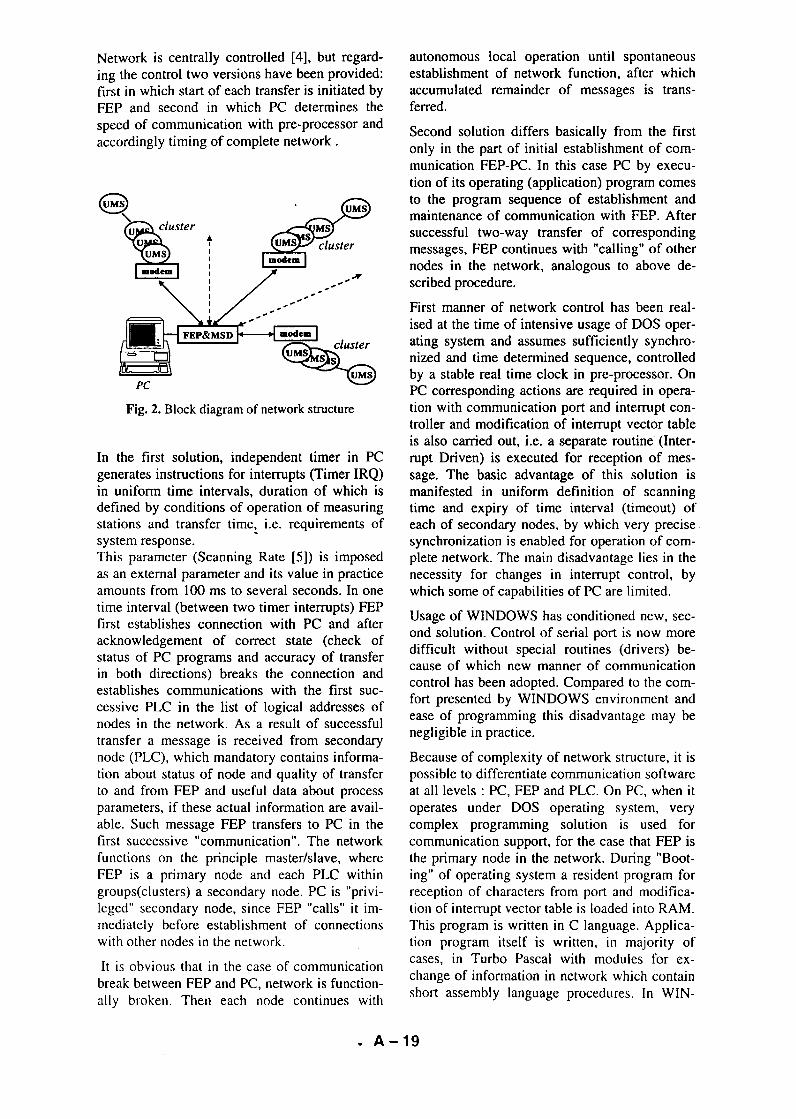
Network is centrally controlled [4], but regard-ing the control two versions have been provided:first in which start of each transfer is initiated byFEP and second in which PC determines thespeed of communication with pre-processor andaccordingly timing of complete network .
Fig. 2. Block diagram of network structure
In the first solution, independent timer in PCgenerates instructions for interrupts (Timer IRQ)in uniform time intervals, duration of which isdefined by conditions of operation of measuringstations and transfer time, i.e. requirements ofsystem response.This parameter (Scanning Rate [5]) is imposedas an external parameter and its value in practiceamounts from 100 ms to several seconds. In onetime interval (between two timer interrupts) FEPfirst establishes connection with PC and afteracknowledgement of correct state (check ofstatus of PC programs and accuracy of transferin both directions) breaks the connection andestablishes communications with the first suc-cessive PLC in the list of logical addresses ofnodes in the network. As a result of successfultransfer a message is received from secondarynode (PLC), which mandatory contains informa-tion about status of node and quality of transferto and from FEP and useful data about processparameters, if these actual information are avail-able. Such message FEP transfers to PC in thefirst successive "communication". The networkfunctions on the principle master/slave, whereFEP is a primary node and each PLC withingroups(clusters) a secondary node. PC is "privi-leged" secondary node, since FEP "calls" it im-mediately before establishment of connectionswith other nodes in the network.
It is obvious that in the case of communicationbreak between FEP and PC, network is function-ally broken. Then each node continues with
autonomous local operation until spontaneousestablishment of network function, after whichaccumulated remainder of messages is trans-ferred.
Second solution differs basically from the firstonly in the part of initial establishment of com-munication FEP-PC. In this case PC by execu-tion of its operating (application) program comesto the program sequence of establishment andmaintenance of communication with FEP. Aftersuccessful two-way transfer of correspondingmessages, FEP continues with "calling" of othernodes in the network, analogous to above de-scribed procedure.
First manner of network control has been real-ised at the time of intensive usage of DOS oper-ating system and assumes sufficiently synchro-nized and time determined sequence, controlledby a stable real time clock in pre-processor. OnPC corresponding actions are required in opera-tion with communication port and interrupt con-troller and modification of interrupt vector tableis also carried out, i.e. a separate routine (Inter-rupt Driven) is executed for reception of mes-sage. The basic advantage of this solution ismanifested in uniform definition of scanningtime and expiry of time interval (timeout) ofeach of secondary nodes, by which very precisesynchronization is enabled for operation of com-plete network. The main disadvantage lies in thenecessity for changes in interrupt control, bywhich some of capabilities of PC are limited.
Usage of WINDOWS has conditioned new, sec-ond solution. Control of serial port is now moredifficult without special routines (drivers) be-cause of which new manner of communicationcontrol has been adopted. Compared to the com-fort presented by WINDOWS environment andease of programming this disadvantage may benegligible in practice.
Because of complexity of network structure, it ispossible to differentiate communication softwareat all levels : PC, FEP and PLC. On PC, when itoperates under DOS operating system, verycomplex programming solution is used forcommunication support, for the case that FEP isthe primary node in the network. During "Boot-ing" of operating system a resident program forreception of characters from port and modifica-tion of interrupt vector table is loaded into RAM.This program is written in C language. Applica-tion program itself is written, in majority ofcases, in Turbo Pascal with modules for ex-change of information in network which containshort assembly language procedures. In WIN-
A-19

DOWS environment application programs arewritten mainly in Delphi and operation withcommunication ports is made significantly eas-ier.
Basically, FEP contains programming solutionsfor control of accuracy of its own operation (SelfTest) and operating programs for establishmentof network function, monitoring and control ofits operation. Since nodes in network are specificdevices (UMSs) , own communication protocolhas been developped. This protocol definesmanner of establishment and breaking of con-nection between nodes, message format andmanner of control of transfer accuracy. All pro-gram modules are written in assembly languagefor MC68HC11 [3], optimized as regards dura-tion and contained as resident software inEPROM. RAM is used for some of side parame-ters and for messages. For specific requirementsit is possible to transfer the code from PC to FEP(teleloading) and its storage in RAM, which ismainly used in program testing stage.
UMS (PLC) device executes supervision andcontrol of technological process and its operat-ing program is adjusted to concrete require-ments. Apart from diagnostic and testing pro-gram module [6] and operating program, eachPLC must also contain communication programbecause of its dependence in operation (it mustbe sent a command, real time clock value etc..)and due to the requirement that measurementdata should be transferred to host computer.Functions of message reception, control of trans-fer accuracy and sending of answers are con-tained in a special procedure which is activatedby hardware interrupt from communication port.Since here a secondary node in the network isenvolved these actions are initiated by FEP andthey do not disturb basic functions of PLCswhich are measuring, control and data collec-tion.
4. MESSAGE FORMATTING AND NET-WORK PERFORMANCE
Designed computer network operates based onasynchronous transfer. To be able to establishand break efficiently connections between net-work nodes and to achieve optimal speed andmaximal accuracy of transfer, a standard mes-sage format has been designed, which is pre-sented in fig.3.
DAD - Destinations AddressSAD - Source Address (Message Originator)EAD - End Address (Address of end destination
node)CODE - Status or CommandCST - Communications status (Previous transfer
quality)Text - Useful informationEOM- End of MassageBCC - Block Check Character
It is obvious that given characters (total 7 byteswithout useful information) represent an over-head which must always be transferred in eachcommunication. Duration of the transfer of thismessage header and control characters , may berepresented in the following manner (1):
(1)
where Tr is the physical transfer speed (TransferRate). Due to some realistic conditions of opera-tion, in practice, transfer rates of 9600 bps and19200 bps are used, so that th = 7.3 ms, i.e. th =3.65 ms, respectively. It is obvious that highertransfer rate must be selected whenever possible,but present limitations must be taken into con-sideration, which are conditioned by the qualityof transfer routes (telephone lines) and distancebetween nodes. For normal maintenance of net-work in operation, for control of presence ofnodes in the network and control of their state itis sufficient that such (null ) message is trans-ferred from PC to any secondary node and thatanswer is received back. Each of the charactersin the message has its significance at two bit lev-els, so that diagnostic of network operation isdone by their analysis. A part of message con-taining useful information (text) has a variablelength, but for the case of commands from PCs,5 bytes are sufficient for any action on PLCs orduring control process. Accordingly, commandmessage length has been standardized to thelength of 12 bytes, i.e. its transfer time is 12.5ms or 6.25 ms, respectively.UMS, in its standard configuration supports 64analogue and 128 bit inputs. During the opera-tion, sampling of input channels is performedand after corresponding controls, a message isformed for sending to the host computer. Thelength of this message may be represented in thefollowing manner (2):
Dp = 3 + 64*2 + 22 = 153 bytes (2)DAD I SAD EAD CODE CST EOM I BCC
Fig. 3. Message formatEach message contains origination time (firstthree characters) and since measuring data are
A - 2 0

one byte numbers and transfer obeys certainrules of ASCII code ( Etx= $03 etc.), it is neces-sary to carry out adjustment for the transfer, sothat total length of useful information is 153bytes, and time required for its transfer is (3):
tt =153*Tr (3)
With given transfer rates, with the inclusion ofone start and one stop bit, maximaltransfer timefor the message is (4):
Tp =th + tt (4)
which practically amounts to 166.6 ms or 83.3ms, respectively for transfer rates of 9600 bpsand 19200 bps.
When complete exchange of information istaken into consideration, i.e. command sent toPLC and command sent to PC, physical transferitself lasts 180 ms or 90 ms, respectively. If it isknown that each information must be transferredfrom PC to FEP and then to secondary node andreversibly, it is obvious that this transfer timeshould be doubled. Accordingly, for messageexchange time interval must be provided of 350ms or in a more favourable case, of 175 ms.If it is known that all other actions on UMS andespecially on PC (including measuring, logicalcontrol, analysis and preparation of messages,i.e. display on the screen and generation ofcommand codes) last significantly shorter, itmay be concluded that for servicing one secon-dary node, 400 ms, or 200 ms is required. Whatdoes it mean in practice ? Optimal response timeof such network including about 50 nodes is inthe range of 10 seconds. In case of issuing com-mands it may be very slow. Due to this, an algo-rithm has been developed for forced establish-ment of connection between selected nodes, sothat servicing of urgent requirements can bedone in the shortest time interval (about 200 ms).After that scanning of other nodes is performedaccording to their logical addresses.In real situations frequent faults occur on par-ticular nodes and they are out of operation for ashorter or longer time interval or without com-munication with FEP. To improve network per-formance (to shorten response time), these nodesare excluded from the network and only afterremedy of faults their operation resumed. Thisprocedure has been called dynamic network con-
figuration and it functions efficiently in practice.Criteria for exclusion of nodes from network andtheir re-connection are sufficiently "broad" andmay be easily changed.
5. CONCLUSION
First impression is that realised network, by itscharacteristics, does not belong to the group ofhigh performance solutions. For standard net-works megabit transfer rates are present. How-ever, if it is known that development and appli-cation of this network has for its practical aimsolution of one group of requirements (prob-lems) in real time environment, then it may bepointed out that this is a very rational solution.Processes and events which are monitored andcontrolled by such system are relatively slow(town central heating system, water supply net-work, electrolytic copper refinery plant, meteor-ology and air pollution control etc.). Actual in-formation about the state of these processes aregenerated in one minute intervals or more rarely,so that efficiency of communication system cannot been questioned. Apart from favourableprice/performance ratio, functioning of realizednetwork has shown to be very efficient and reli-able and especially resistant to poor communica-tion conditions, thanks to solid transfer qualitycontrol and possibility of dynamic network re-configuration.
6. REFERENCES
[1] W.S. Blansche and J. Me. Gill: The control ofindustrial processes by digital techniques (Theorganisation, Design and Construction of DigitalControl Systems), Elsevier Scientific PublishingCompany, Amsterdam, 1976.
[2] G.C. Barney: Inteligent instrumentation, PrenticeHall International (UK) Ltd, New York, 1988.
[3] M68HCI1 Reference Manual, Motorola Inc.1990.
[4] A.S. Tanenbaum: Computer Networks, PrenticeHall Inc., Englewood, 1989.
[5] N. Nissanke: Realtime Systems, Prentice HallEurope, Hertfordshire, 1997.
[6] B. Djordjevic, M.Jevtic, M.Damnjanovic: DigitalReal-Time System Testing, Charisma Evidentzund Caritas Gerd Nowack (Hsrg.), Bochum,1997.
. A - 2 1

Шесша национална конференција со меѓународно учесшво ЕТАИ'2003Sixth National Conference With International Participation ЕТАГ2003
Охрид, Република МАКЕДОНИЈА - Ohrid, Republic of MACEDONIA17-20. IX 2003
MK0600054
ADAPTIVE ALGORITHM FOR IDENTIFICATION OFTHE ENVIRONMENT PARAMETERS IN CONTACT TASKS
Atanasko Tuneski, Darko Babunski
Faculty of Mechanical Engineering, "St. Cyril and Methodius" University,P.O. Box 464, MK-1001 Skopje, Republic of Macedonia
e-mail: [email protected]
Abstract. An adaptive algorithm for identification ofthe unknown parameters of the dynamic environ-ment in contact tasks is proposed in this paper usingthe augmented least square estimation method. Anapproximate environment digital simulator for thecontinuous environment dynamics is derived, i.e. adiscrete transfer function which has theapproximately the same characteristics as thecontinuous environment dynamics is found. Forsolving this task a method named hold equivalence isused. The general model of the environmentdynamics is given and the case when the environmentdynamics is represented by second order models withparameter uncertainties is considered.
Key words: dynamic environment, identification,hold equivalence
1. INTRODUCTION
One of the major topics of currrent robotics researchis the control of constrained motion of roboticmanipulators interacting with dynamic environment.
In general case of treating the contact tasks, thecomplete real environment dynamic model must betaken into account because the dynamic environmenthas a significant influence on the performances andthe stability of the single or multiple robots in thecontact tasks [1-8].
In this paper the case when the contact between theobject and the environment does imply energytransfer or dissipation is analyzed, i.e. when themanipulated object is kinematically constrainedand/or dynamically coupled with the dynamicenvironment.
Based on the principle of closed-loop control systemsstability, the control laws stabilizing simultaneouslythe robot motion and its interaction forces with thedynamic environment have been synthesized [1-8].Control design of robot for compliant manipulationon dynamic environments is studied in [9-13].
In most practical contact tasks, such as assembly,machining, or remote handling in an unstructuredenvironment, the exact values of the environmentdynamic parameters are not known in advance, andonly regions of the possible values of theseparameters are known. In this paper an adaptivealgorithm for identification of the unknownparameters of the dynamic environment in the contacttasks is proposed using the augmented least squareestimation method. An approximate environmentdigital simulator for the continuous environmentdynamics is derived using the method named holdequivalence.
2. THE ENVIRONMENT MODEL
The environment model is essential for the analysisand synthesis of single and multiple robots holding anobject motion of which is constrained by theenvironment. The environment model describes thecomplex nonlinear relation between the contact forceFc at the contact point between the manipulated
object and the environment and the position andmotion of the contact point.
The general dynamic model of the environment withwhich the object is interacting may be described in
.A - 51
the object coordinates YOa ER in the form of a
vector nonlinear differential equation [1], [14]:
F" = t&iOY Y Y ^ =(1)
where Ft sRmx> is the generalized constraint contact
force at the contact point between the object and theenvironment, }} is six-dimensional nonlinear vector
function, Y^ G R6xl are the absolute coordinates of
the mass center of the manipulated object, C
represents viscous friction, inertial, Coriolis,centrifugal, gravitational and elastic contributions,
M{YOe)eRmxm is the non-singular inertia matrix
representing contribution of the environment,IiXoo^oa)
eRmxl coHect terms which represent
viscous friction, Coriolis, centrifugal, gravitational
and elastic contributions, and ST(YOa)eRmxm is
continuous matrix. In a three-dimensional space the
dimension m of the contact force vector Fe depends
on the technological task to be solved, when eitheronly the interaction force between the object and theenvironment is of interest or when the moments ofthese forces are also included. At present, it will beadopted that the dimension m and the number ofdegrees of freedom of the robot mechanism n,(either single or multiple), are equal, i.e. m — n.
One of the most important properties of theenvironment dynamics model (1) is the uniqueness ofits solution with respect to the force Fe,
(rangS(YOa)=m = n), since under the same initial
conditions different actions of the environment forcecannot exert equal object motions in that environment[2].
3. ADAPTIVE ALGORITHM UNDERUNKNOWN ENVIRONMENT
In most practical contact tasks, the exact values of theenvironment parameters are not known in advance,and only regions of the possible values of theseparameters are known. Let us suppose that the set ofthe unknown parameters of the dynamic environmentwhich constraints the object motion is given by
C$t)ERr, where r is the number of the unknown
environment parameters. Assuming that the bounds
of the possible values of the environment parameters
are defined by the set C^t)sRr, an adaptive
algorithm for identifying the unknown environmentparameters is presented in the text to follow. Thisadaptive algorithm enables the single or multiplerobots to perform compliant manipulation on theunknown dynamic environment.
We consider the case when the environmentdynamics is represented by the second order modelswith parameter uncertainties.Without loss in generality, and in the sake ofsimplicity, here the planar case is considered, i.e. thecase when the dimension of the vector Fe is
m = 2. So, the generalized force Fe at the contact
between the manipulated object and the environmentmay be decomposed in two contact forcecomponents: (i) F normal to the environmental
constraint, and (ii) Fa J_ F^.
Let us assume that the contact force component F
is a sum of inertia, friction and elastic terms:
while the contact force component Fa JL F is the
sum of inertial and friction terms:
Ра=тЉо +hAa +^XFey -Sgn ( i O a ) (3)
where x^ and y^ are object coordinates;
^ У = mn'^mt> mo * s ш е m a s s °f m e manipulated
object, me is the equivalent mass representing the
inertial contribution of the environment, mx =tf l 0 ,
hy, hx ,k , Vx denote viscous friction components,
environment stiffness and static friction coefficient,respectively. So, under the assumption that the static
friction coefficient Vx is known, the set Cft) E Rr
containing the unknown environment parameters isgiven by:
O=(my hy ky mx hx) e R5 (4)
These parameters may be identified using theenvironment digital simulators in both directions ofthe contact force components and the adaptivealgorithm presented in the text to follow.
3.1 SYNTHESIS OF THE ENVIRONMENTDIGITAL SIMULATORS
In the s — domain (s=(d I dt) - the Laplace
operator) the equation (2) may be written as
(5)where
is the transfer function of the environment dynamics,which, by taking into account the environmentparameter uncertainties, may be described as
A - 5 2
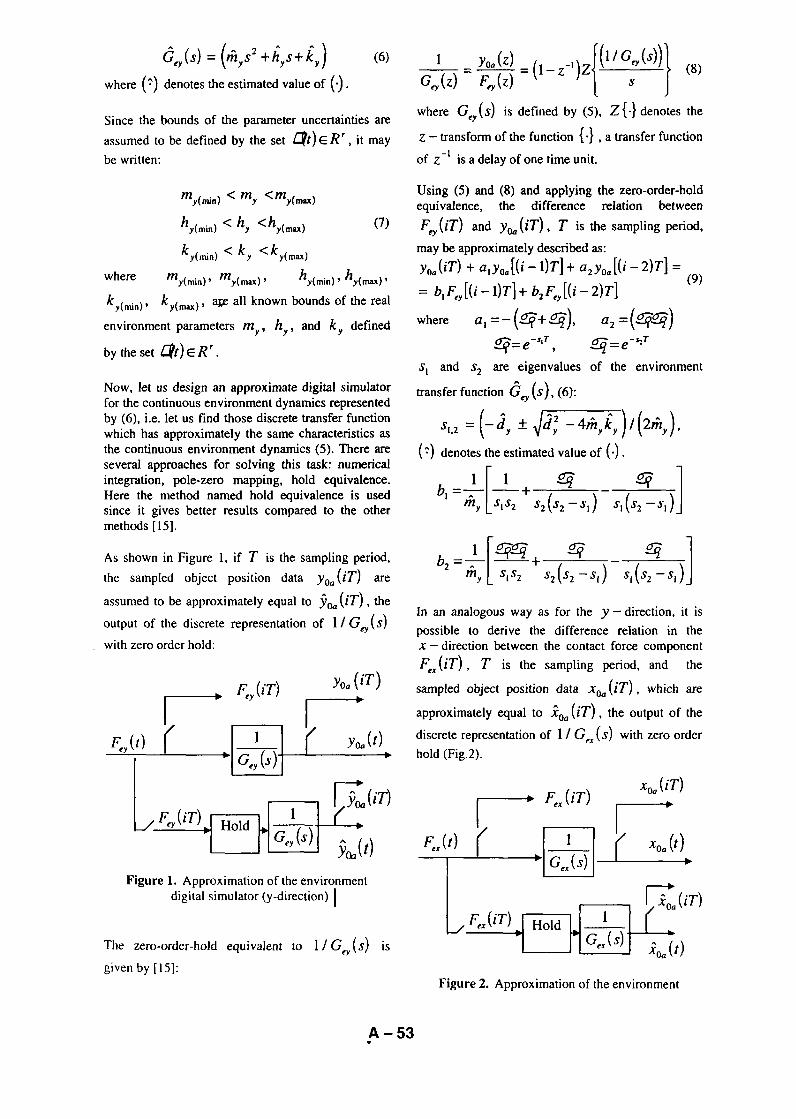
Gey(s) = (mys2+hys+ky) (6)
where (?) denotes the estimated value of (•).
Since the bounds of the parameter uncertainties are
assumed to be defined by the set L$t)ERr, it may
be written:
(7)
where " i , ( m i n ) , mAmu), V i » ) ' A W
^>(min)» ^>(тах)' a^ a " k n o w n bounds of the real
environment parameters my, hy, and ky defined
by the set £fr)etfr.
Now, let us design an approximate digital simulatorfor the continuous environment dynamics representedby (6), i.e. let us find those discrete transfer functionwhich has approximately the same characteristics asthe continuous environment dynamics (5). There areseveral approaches for solving this task: numericalintegration, pole-zero mapping, hold equivalence.Here the method named hold equivalence is usedsince it gives better results compared to the othermethods [15].
As shown in Figure 1, if T is the sampling period,
the sampled object position data УОаЦТ) are
assumed to be approximately equal to yJiT), the
output of the discrete representation of l/Gjs)
with zero order hold:
Г ( yjt)-J
Hold
9Jt)Figure 1. Approximation of the environment
digital simulator (y-direction)
The zero-order-hold equivalent to \IGAs) is
given by [151:
(8)
where G (s) is defined by (5), Z{-} denotes the
Z — transform of the function {•} , a transfer function- i .
of z is a delay of one time unit.
Using (5) and (8) and applying the zero-order-holdequivalence, the difference relation between
FjiT) and ;yO f l(lT), T is the sampling period,
may be approximately described as:
(9)= blFt,[(i-l)T]+b2Fv[(i-2)T]
where ax = - a2 =
s{ and ѕг are eigenvalues of the environment
transfer function G (s),(6):
denotes the estimated value of (•).
_ 1
m
4my
s2(s2-Sl)
In an analogous way as for the y — direction, it is
possible to derive the difference relation in theX - direction between the contact force component
Fa\iT), T is the sampling period, and the
sampled object position data xQa {iT), which are
approximately equal to xQa{iT), the output of the
discrete representation of 1 / Gex(s) with zero order
hold (Fig.2).
ГGjs)
Hold
(iT)
Figure 2. Approximation of the environment
A - 5 3

digital simulator (x-direction)
The zero-order-hold equivalent to \IGa\s) is given
by |
ao>
Using (3) and (10), and applying the zero-order-holdequivalence method [15], the difference relation
between Fa(iT) and XOa{iT) may be
approximately described as:
JCJJT) + C,A:0O[(J - 1)7-] + C 2 J C J ( / - 2)7"] +
(П)
mm, T mm
' = F
tx ~ (see(3)).
3.2. ADAPTIVE ALGORITHM FOR THEUNKNOWN ENVIRONMENT
DYNAMICS
The adaptive algorithm for the unknown environmentdynamics is as follows:
Step 1: Design the single or multiple robot controlsystem with the assumption that the initial dynamic
° h°y, and ky haveenvironment parameters m°y, hy, and ky
the values which lie in the a priori known regionsdefined by (7):
k . <k° <k ^
where
>(min)' )>(max)' y(min)' y(max)' y(min)'
^y(max)'are a ' l l^own bounds of the environment
parameters m , A , and k .
Step 2: Drive the single or multiple robots and themanipulated object with the controller designed inStep 1 to manipulate on the real environment and
, yj2T) ,yOa{NT),
, Fey(T), FJ2T) FjNT)\
, xOa(2T) ,xjNT),
F'(NT)
collect the effective object position data and reactionforce data from the object position and force sensors.In that way the following set of inputs and outputs isobserved:
(12)
(13)
These sets of inputs and outputs are used in the Step4 of this algorithm for identification of the parametersa, , a2,bx,b2 of the difference relation (9), and
identification of the parameters c,, c2, c 3 and
dx,d2 of the difference relation (11), using
augmented least square estimation method [15].
When all these parameters <2,, a2, bx, b2,
c,, c2, c 3 and dx, d2 are identified, the estimated
values of the unknown real environment parameters
>n . hy, ky, mx,
it is shown in Step 4.
and hx, may be calculated, as
Step 3: Following the procedure presented in theParagraph 3, design the approximate digital simulatorfor the continuous environment dynamics, i.e. derivethe difference relations (9) and (11):
YjiT) + e i yj( i-1)Г]+ a2YOa[(i-2)T] =
= blFey[(i-l)T]+b2Fey[(i-2)T]
XjiT) + e,*J(i
where T is the sampling period,
s{ and s2 are eigenvalues of the environment
transfer function Gey (s) (6):
1_2 rh..
— — L *•
V2 S2(s2-Sx)
*o
S\S2
A - 5 4

&75-
identified from the effective sampled data xOa{iT)
and F^iiT), i = n + \,n + 2, , N , and then
the new values of mx, and hx, may be calculated
from the system of equations:
W ^ ffl, ^
4 "e + C"^
(see(3)).
Step 4: Identify the real environment parametersusing augmented least square estimation method [15].The procedure is as follows. First, using the sets ofinputs and outputs (12) and (13) observed in Step 2,define the following matrices:
(14)and, for i = 2, ,3, A,
eR 4x1
(15)
Then, using (14) and (15) the explicit augmentedleast square solution can be written as [15]:
So, from the equation (16) the parameters ax, a2,
and bx, b2 of the difference relation (9) may be
identified using the the effective sampled data
yJiT) and Fey(iT), / = 2,3,4, ,N,
(equations (14) and (15)). Then the new estimatedvalues of the unknown real environment parameters
Л A.
and k may be calculated as follows:m
y 7 h
1 1
sxs2
dy =(s{ +
ky =(sls2)
s2(s2-st)
)-my (17)
my
In a completely analogous way as for parameters
a i , a 2 , and £>,, b2, the parameters c{, c2, c 3 and
d{,d2 of the difference relation (11) may be
w h e r e OC = - C 3 = <
Finally, with these new identified environment
parameters fhy, A , k , mx, and Ax, Step 1 is
repeated, i.e. the single or multiple robots controlsystem is redesigned using these new identifiedvalues of the unknown parameters of the dynamicenvironment.
With the adaptive algorithm defined by the Steps
(1 + 4 ) , the single or multiple robots system can
improve its environment adaptability autonomously.
4. CONCLUSION
The paper presents an adaptive algorithm foridentification of the parameters of the dynamicenvironment in contact tasks. The environmentdynamics has been taken into account since ingeneral case of treating the contact tasks, thecomplete real environment dynamic model must beconsidered. The dynamic environment has asignificant influence on the performances and thestability of the single or multiple robots in the contacttasks [2]. The general model of the environmentdynamics is given and the case when the environmentdynamics is represented by second order models withparameter uncertainties is considered.
An approximate environment digital simulator for thecontinuous environment dynamics is proposed, i.e. adiscrete transfer function which has approximatelythe same characteristics as the continuousenvironment dynamics is found. For solving this taskthe method named hold equivalence is utilized. Usingthe obtained discrete transfer function, and using theaugmented least square estimation method, a specialadaptive algorithm for identifying the unknownparameters of the dynamic environment is proposed.With this adaptive algorithm the combined single ormultiple robots and object system can improve itsenvironment adaptability autonomously.
A - 5 5

REFERENCES:
[1]. M. Vukobratovic and Y. Ekalo, "UnifiedApproach to Control Laws Synthesis forRobotic Manipulators in Contact with DynamicEnvironments" In: Proc. IEEE Int. Conferenceon Robotics and Automation, Atlanta, GA, pp.213-229,(1993).
[2]. Y. Ekalo and M. Vukobratovic, "Quality ofStabilization of Robot Interacting with DynamicEnvironment", Journal of Intelli-gent andRobotic Systems, Vol.14, pp. 155-178, (1995).
[3]. Y. Ekalo and M. Vukobratovic, "Robust andAdaptive Position/Force Stabilization ofRobotic Manipulators in Contact Tasks",Robotica, Vol.11, pp. 373-386, (1993).
[4]. D. Stokic and M. Vukobratovic, "Contributionto Practical Stability Analysis of RobotsInteracting with Dynamic Environment",Proc.of the First ECPD Int. Conference onAdvanced Robotics and Intelligent Auto-mation, Athens, pp. 693-699, (1995|).
[5]. M. Vukobratovic and Y. Ekalo, "NewApproach to Control of Robotic ManipulatorsInteracting with Dynamic Environment",Robotica, Vol.14, pp. 31-39, (1996).
[6]. M. Vukobratovic and A. Tuneski, "Contri-bution to the Control of Multiple CompliantManipulation on Dynamical Environments",Third International Conference on AdvancedRobotics, Intelligent Automation and ActiveSystems, Bremen, Germany, pp. 233-239,(1997).
[7]. M. Vukobratovic, "The Role of EnvironmentDynamics in the Contact Force Control ofManipulation Robots", ASME Journal onDynamic Systems, Measurement and Control,Vol. 119, No.2, pp. 157-164, (1997).
[8]. Tuneski, M. Vukobratovic, "MathematicalModel of Multiple Manipulators: CooperativeCompliant Manipulation on DynamicalEnvironment" Journal of Mechanism andMachine Theory, Vol.33, pp.1211-1239,(1998).
[9]. Tuneski A., Vukobratovic M., "Contribution tothe Adaptive Control of Multiple CompliantManipulation on Dynamic Environments",Robotica, Vol.17, pp.97-109, (1999).
[10]. Tuneski A., Vukobratovic M, Dimirovski G.,"Adaptive Control of Multiple RobotsManipulation on Dynamical Environment",Journal of Systems and Control Engineering,Proceedings of the Institution of MechanicalEngineers, Part I, UK, 2000.
[11]. Z. Luo, K. Ito and M. Ito, "Multiple RobotManipulators: Cooperative Compliant Mani-pulation on Dynamical Environments", Proc.IEEE/RSJ Conf. on Intelligent Robots andSystems, pp. 1927-1934, (1993).
[12]. Z. Luo and M. Ito, "Control Design of Robotfor Compliant Manipulation on DynamicalEnvironments", IEEE Transactions on Roboticsand Automation, Vol.9, No. 3, pp. 286-296,(1993).
[13]. Z. Luo, Y. Uematsu, K. Ito, A. Kato and M. Ito,"On Cooperative Manipulation of DynamicObject", IEEE/RSJ Conference on IntelligentRobots and Systems, pp. 1230-1237, (1994).
[14]. A. De Luca and C. Manes, On the Modeling ofRobots in Contact with a DynamicEnvironment", International Conference onAdvanced Robotics, Pisa, Italy, pp. 568-574,(1991).
[15]. G. Franklin, and J. Powell, Digital Control ofDynamic Systems. Addison-Wesley PublishingCompany Inc., (1980).
Pe зи ме
АДАПТИВЕН АЛГОРИТАМ ЗА ИДЕНТИФИКАЦИЈА HAПАРАМЕТРИТЕ HA ОКОЛИНАТА BO КОНТАКТНИ ЗАДАЧИ
Атанаско Тунески, Дарко Бабунски
Машински факултет - Скопје, Универзитет "Св.Кирил и Методиј",П.Фах 464, МК-1001 Скопје, Република Македонија
e-mail: [email protected]
Bo оваа статија претставен е адаптивен методза идентификација на непознати параметри надинамичка околина во контактни задачи сокористење на алгоритми за естимација со ме-тодот на најмали квадрати. Апроксимативендигитален симулатор на околината е при-кажан, т.е. одредена е дискретна преноснафункција што ги има приближно истите ка-рактеристики како и континуалната преносна
функција што ја дефинира динамиката на око-лината. За одредување на дигиталниот симу-латор користен е методот на еквивалентнозадржување. Општиот модел на динамикатана околината е даден и разгледуван е случајоткога околината е претставена со модели сонепознати параметри од втор ред.
Клучни зборови: динамичка околина, иденти-фикација, еквивалентно задржување
- A - 5 6

Шесша национална конференција со меѓународно учесшво ЕТАИ'2003Sixth National Conference With International Participation ЕТАГ2003
Охрид, Република МАКЕДОНИЈА - Ohrid, Republic of MACEDONIA17-20. IX 2003
MK0600055
СИМУЛАЦИЈА HA ТРАНСФОРМАТОРСКАПОСТРОЈКА BH/CH BO СОФТВЕРСКИОТ ПАКЕТ
DIGSILENT POWER FACTORY
Љубиша Младеновски, Искра Димова, Атанас Илиев, Вангел Фуштиќ
Електротехнички факултет - Скопје, Карпош П, б.б. П. Фах 574, МК-1001 Скопје,[email protected], [email protected], [email protected], [email protected]
Извадок - Bo овој труд е прикажан процесотна моделнрање на трансформаторска построј-ка на внсок напон/среден напон (ВН/СН) којанаоојува потрошувачн на среднонапонскатастрана, како и моделот на кондензаторска ба-терија која служи за регулирање на напонотна среднонапонската собирннца. Моделнрање-то е извршено со софтверскиот пакет DlgSI-LENT Power factory. Исто така, се прикажанирезултатнте од извршената снмулација.
Клучни зборови - трансформаторска пос-тројка, кондензаторска батерија, моделирање,симулација
1.ВОВЕД
Основната намена на софтверскиот пакетDIgSILENT Power factory (Digital SlmuLati-on and Electrical NeTwork) пред ce e да се a-нализираат големи електроенергетски си-стеми со голем број јазли, и голем број напотрошувачи. Исто така, овој програм о-возможува извршување на анализи и кон-трола на однесувањето на некој елементод електроенергетскиот систем (генера-тор, мотор, трансформатор, кондензатор-ска батерија) преку креирање на негов со-одветен модел во DSL (DIgSILENT Simula-tion Language). Развојот на овој програм езапочнат во седумдесетите години на ми-натиот век, поточно во 1976 година, доде-ка во 1997 година на пазарот излегува пр-вата верзија на Power factory [1]. Својатаработа програмот ја базира на Њутн-Раф-соновиот метод. Во зависност од тоа кој
дел од електроенергетскиот систем (EEC)сакаме да го анализираме DIgSILENT Po-wer factory е поделен во четири категории:
• Производство (Generation);• Пренос (Transmission);• Дистрибуција (Distribution);• Индустрија (Industrial).
2. МОДЕЛИРАЊЕ НА КОМПОЗИТЕНМОДЕЛ НА ЕНЕРГЕТСКИ
ТРАНСФОРМАТОР
Елементите со кои се компонира работ-ното коло се избираат од експлицитнатабиблиотека, која ги содржи сите типовина елементи кои можат да се сретнат воEEC и кои се комерцијално расположли-ви на пазарот. Доколку треба да се работисо нестандардни елементи, проектантотможе да избере некој елемент и со едно-ставна промена на неговите параметри даја добие посакуваната карактеристики.Барањата кои се анализирани во истражу-вањето се: номинален напон на среднона-понската собирница и„= 21 kV, дозволенапромена на напонот од 1,5 % (20.685 kV <Un < 21.315 kV), временското затегање надејството на регулаторот е 10, број на ре-гулациски отцепи: ±13. Доколку напонотсе намали под 80%-£/„ или доколку ја над-мине границата од 105%-Un трансформа-торот треба да се исклучи од работа. Вре-мето потребно регулациската преклопкада премине од една во друга положба из-несува 5 ѕ.
.А-69
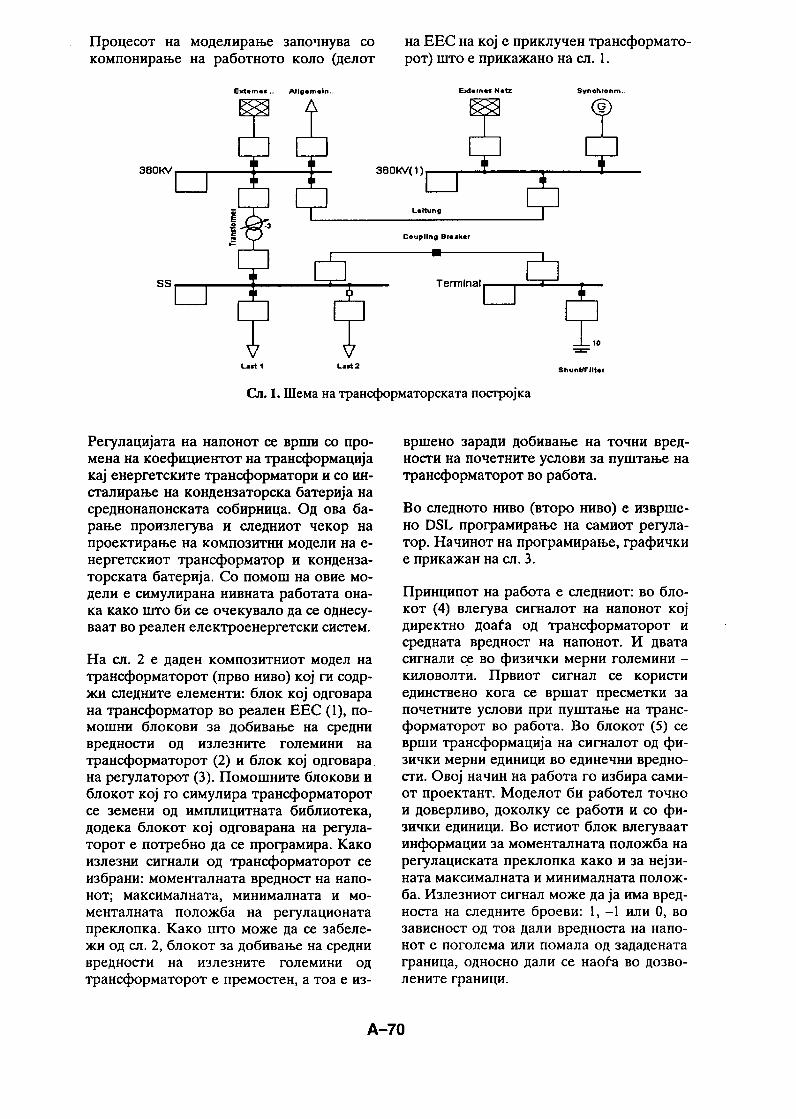
Процесот на моделирање започнува сокомпонирање на работното коло (делот
на EEC на кој е приклучен трансформато-рот) што е прикажано на сл. 1.
Extern** „ Allg«m«in.. Ext«rn«f N«tz Synohronrr
380kVT
1380KV(1)
Ltltung
Coupling Br«jk«r
ss,
TTerminal.
ShunVFIIUl
Сл. I. Шема на трансформаторската постројка
Регулацијата на напонот се врши со про-мена на коефициентот на трансформацијакај енергетските трансформатори и со ин-сталирање на кондензаторска батерија насреднонапонската собирница. Од ова ба-рање произлегува и следниот чекор напроектирање на композитни модели на е-нергетскиот трансформатор и конденза-торската батерија. Co помош на овие мо-дели е симулирана нивната работата она-ка како што би се очекувало да се однесу-ваат во реален електроенергетски систем.
На сл. 2 е даден композитниот модел натрансформаторот (прво ниво) кој ги содр-жи следните елементи: блок кој одговарана трансформатор во реален EEC (1), по-мошни блокови за добивање на среднивредности од излезните големини натрансформаторот (2) и блок кој одговара.на регулаторот (3). Помошните блокови иблокот кој го симулира трансформаторотсе земени од имплицитната библиотека,додека блокот кој одговарана на регула-торот е потребно да се програмира. Какоизлезни сигнали од трансформаторот сеизбрани: моменталната вредност на напо-нот; максималната, минималната и мо-менталната положба на регулационатапреклопка. Како што може да се забеле-жи од сл. 2, блокот за добивање на среднивредности на излезните големини одтрансформаторот е премостен, а тоа е из-
вршено заради добивање на точни вред-ности на почетните услови за пуштање натрансформаторот во работа.
Во следното ниво (второ ниво) е изврше-но DSL програмирање на самиот регула-тор. Начинот на програмирање, графичкие прикажан на сл. 3.
Принципот на работа е следниот: во бло-кот (4) влегува сигналот на напонот којдиректно доаѓа од трансформаторот исредната вредност на напонот. И дватасигнали се во физички мерни големини -киловолти. Првиот сигнал се користиединствено кога се вршат пресметки започетните услови при пуштање на транс-форматорот во работа. Во блокот (5) севрши трансформација на сигналот од фи-зички мерни единици во единечни вредно-сти. Овој начин на работа го избира сами-от проектант. Моделот би работел точнои доверливо, доколку се работи и со фи-зички единици. Во истиот блок влегуваатинформации за моменталната положба нарегулациската преклопка како и за нејзи-ната максималната и минималната полож-ба. Излезниот сигнал може да ја има вред-носта на следните броеви: 1, -1 или 0, возависност од тоа дали вредноста на напо-нот е поголема или помала од зададенатаграница, односно дали се наоѓа во дозво-лените граници.
А-70
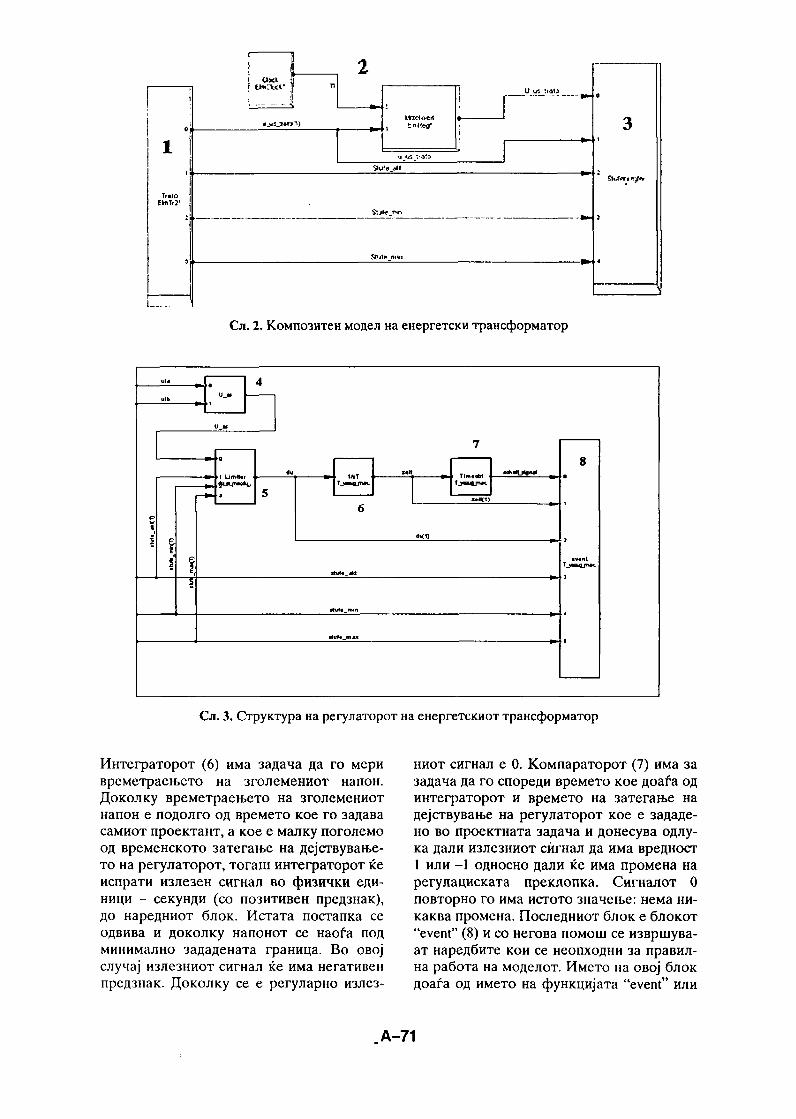
Сл. 2. Композитен модел на енергетски трансформатор
Сл. З. Структура на регулаторот на енергетскиот трансформатор
Интеграторот (6) има задача да го меривреметраењето на зголемениот напон.Доколку времетраењето на зголемениотнапон е подолго од времето кое го задавасамиот проектант, а кое е малку поголемоод временското затегање на дејствување-то на регулаторот, тогаш интеграторот ќеиспрати излезен сигнал во физички еди-ници - секунди (со позитивен предзнак),до наредниот блок. Истата постапка сеодвива и доколку напонот се наоѓа подминимално зададената граница. Во овојслучај излезниот сигнал ќе има негативенпредзнак. Доколку се е регуларно излез-
ниот сигнал е 0. Компараторот (7) има зазадача да го спореди времето кое доаѓа одинтеграторот и времето на затегање надејствување на регулаторот кое е зададе-но во проектната задача и донесува одлу-ка дали излезниот сигнал да има вредностI или -I односно дали ќе има промена нарегулациската преклопка. Сигналот 0повторно го има истото значење: нема ни-каква промена. Последниот блок е блокот"event" (8) и со негова помош се извршува-ат наредбите кои се неопходни за правил-на работа на моделот. Името на овој блокдоаѓа од името на функцијата "event" или
А-71
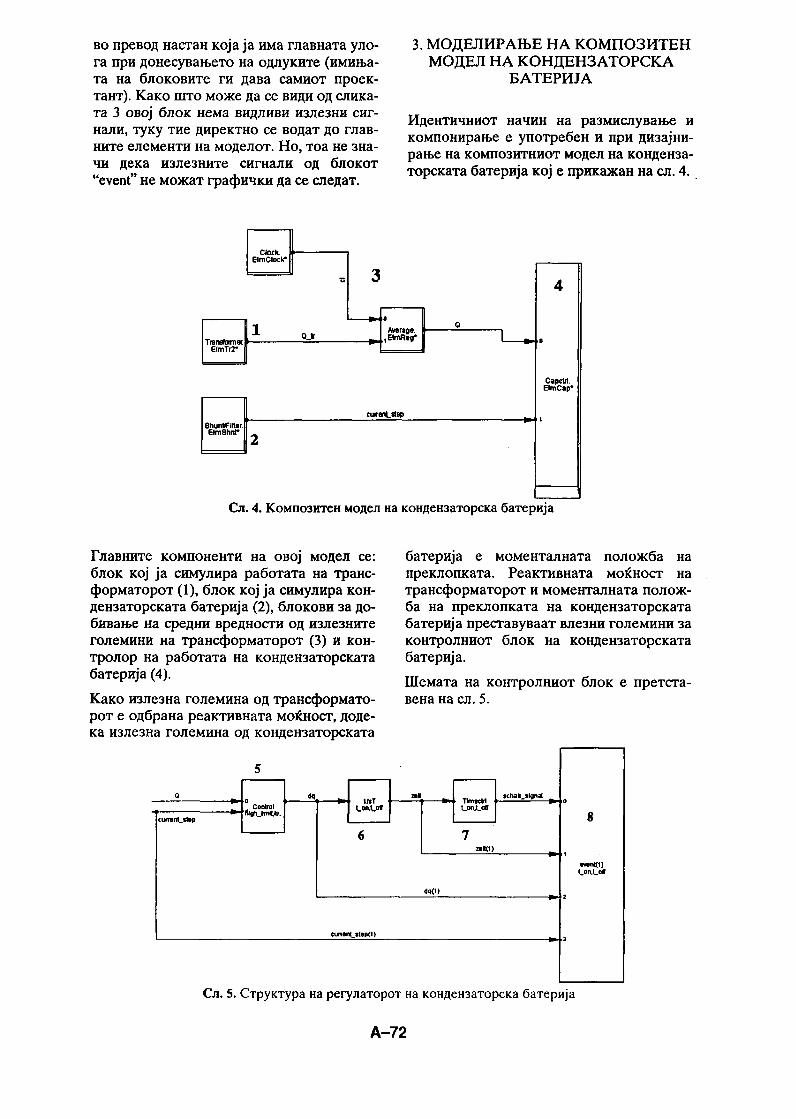
во превод настан која ја има главната уло-га при донесувањето на одлуките (имиња-та на блоковите ги дава самиот проек-тант). Како што може да се види од слика-та 3 овој блок нема видливи излезни сиг-нали, туку тие директно се водат до глав-ните елементи на моделот. Но, тоа не зна-чи дека излезните сигнали од блокот"event" не можат графички да се следат.
3. МОДЕЛИРАЊЕ НА КОМПОЗИТЕНМОДЕЛ НА КОНДЕНЗАТОРСКА
БАТЕРИЈА
Идентичниот начин на размислување икомпонирање е употребен и при дизајни-рање на композитниот модел на конденза-торската батерија кој е прикажан на сл. 4.
Transfomner.ЕИпТгГ"
Shunffmer.ElmShnr
Clotk. Џ ]ElmCloclC||
L=JI
1
2
3
t
Average,EknReir
eurenLstep
Q
4
D
Capctil.ElmCap*
Сл. 4. Композитен модел на кондензаторска батерија
Главните компоненти на овој модел се:блок кој ја симулира работата на транс-форматорот (1), блок кој ја симулира кон-дензаторската батерија (2), блокови за до-бивање на федни вредности од излезнитеголемини на трансформаторот (3) и кон-тролор на работата на кондензаторскатабатерија (4).
Како излезна големина од трансформато-рот е одбрана реактивната моќност, доде-ка излезна големина од кондензаторската
батерија е моменталната положба напреклопката. Реактивната моќност натрансформаторот и моменталната полож-ба на преклопката на кондензаторскатабатерија преставуваат влезни големини законтролниот блок на кондензаторскатабатерија.
Шемата на контролниот блок е претста-вена на сл. 5.
Сл. 5. Структура на регулаторот на кондензаторска батерија
А-72
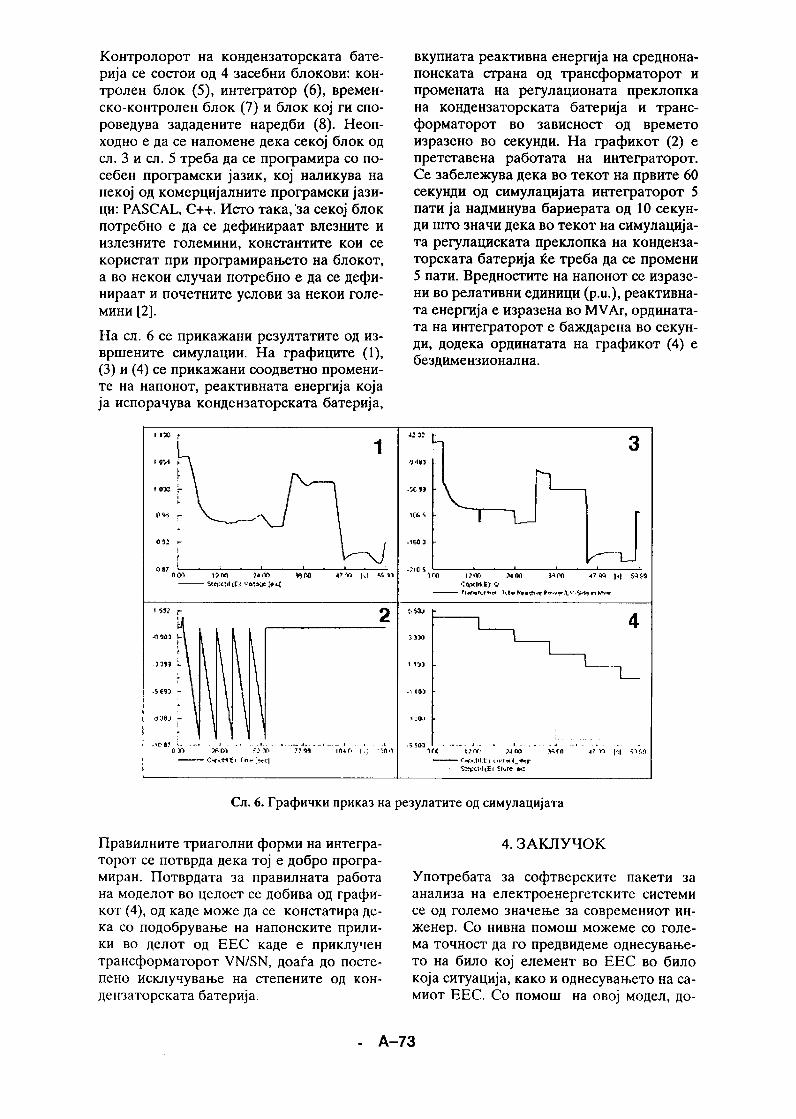
Контролорот на кондензаторската бате-рија се состои од 4 засебни блокови: кон-тролен блок (5), интегратор (6), времен-ско-контролен блок (7) и блок кој ги спо-роведува зададените наредби (8). Неоп-ходно е да се напомене дека секој блок одсл. 3 и сл. 5 треба да се програмира со по-себен програмски јазик, кој наликува нанекој од комерцијалните програмски јази-ци: PASCAL, C++. Исто така/за секој блокпотребно е да се дефинираат влезните иизлезните големини, константите кои секористат при програмирањето на блокот,а во некои случаи потребно е да се дефи-нираат и почетните услови за некои голе-мини [2].
На сл. 6 се прикажани резултатите од из-вршените симулации. На графиците (1),(3) и (4) се прикажани соодветно промени-те на напонот, реактивната енергија којаја испорачува кондензаторската батерија,
вкупната реактивна енергија на среднона-понската страна од трансформаторот ипромената на регулационата преклопкана кондензаторската батерија и транс-форматорот во зависност од времетоизразено во секунди. На графикот (2) епретставена работата на интеграторот.Се забележува дека во текот на првите 60секунди од симулацијата интеграторот 5пати ја надминува бариерата од 10 секун-ди што значи дека во текот на симулација-та регулациската преклопка на конденза-торската батерија ќе треба да се промени5 пати. Вредностите на напонот се изразе-ни во релативни единици (р.и.), реактивна-та енергија е изразена во MVAr, ордината-та на интеграторот е баждарена во секун-ди, додека ординатата на графикот (4) ебездимензионална.
1.ЧХ NIW
Сл. 6. Графички приказ на резулатите од симулацијата
Правилните триаголни форми на интегра-торот се потврда дека тој е добро програ-миран. Потврдата за правилната работана моделот во целост се добива од графи-кот (4), од каде може да се констатира де-ка со подобрување на напонските прили-ки во делот од EEC каде е приклучентрансформаторот VN/SN, доаѓа до посте-пено исклучување на степените од кон-дензаторската батерија.
4. ЗАКЛУЧОК
Употребата за софтверските пакети заанализа на електроенергетските системисе од големо значење за современиот ин-женер. Co нивна помош можеме со голе-ма точност да го предвидеме однесување-то на било кој елемент во EEC во билокоја ситуација, како и однесувањето на са-миот EEC. Co помош на овој модел, до-
А-73
колку се познати: типовите на потрошува-чи на среднонапонска собирница, бројотна степени на кондензаторската батерија,и бројот на регулациони отцепи на енер-гетскиот трансформатор може да се следиработата на трансформаторот, да се кон-тролира дали е преоптоварен, колкавамоќност испорачува на потрошувачите,параметрите на елементите во негова не-посредна близина како и да се врши спо-редба на неколку варијанти на истиот мо-дел,а различни параметри на елементите.
5. ЛИТЕРАТУРА
[1] DIgSILENT Power factory: Integrated PowerSystem Analysis Software, Product Information,DIgSILENT GmbH, Gomaringen, Germany,2002.
[2] DIgSILENT-User Manual and Getting started,Digital simulation and network calculationRev. 10.3, Gomaringen, Germany, 1996.
Summary
SIMULATION OF SUBSTATION HV/MVIN DIGSILENT POWER FACTORY SOFTWARE
Ljubisa Mladenovski, Iskra Dimova, Atanas Iliev, Vangel Fustik
Faculty of Electrical Engineering - Skopje, Кагроѕ П, b.b. P.O. Box 574, MK-1000 Skopje,[email protected], [email protected], [email protected], [email protected]
This paper presents a method for creating a mo-del for substation high voltage/middle voltage(HV/MV) that supplies consumers at middlevoltage side and capacitor battery that regulatesthe voltage at the middle voltage busbar. The re-sults from the analyses are presented and discus-sed. The models of the transformer and the capa-citor battery were made at the University of Ro-
stock, Germany, in DYSIMAC (DYnamic Si-mulation of the MACedonian power plants in anew technological and market environment) pro-ject.
Key words - substation, MV voltage busbar, capaci-tor battery
A-74
Шесша национална конференција со меѓународно учесшво ЕТАИ'2003Sixth National Conference With International Participation ЕТАГ2003
Охрид, Република МАКЕДОНИЈА - Ohrid, Republic of MACEDONIA17-20. IX 2003
MK0600056
ВИРТУЕЛНИ ИНСТРУМЕНТИ ЗА СЛЕДЕЊЕ HAПРОЦЕСИ BO ЕЛЕКТРОЕНЕРГЕТСКИ ПОСТРОЈКИ
Искра Димова, Атанас Илиев, Љубиша Младеновски, Вангел Фуштиќ
Електротехнички факултет - Скопје, П. Фах 574, МК-1001 Скопје,[email protected], [email protected], [email protected], [email protected]
Извадок - Целта на овој труд е да го об-јасни начинот на програмирање и кон-струкција на виртуелните инструментикако и да ја прикаже примената на вакви-те инструменти во електроенергетиката.Инструментот е работен во рамките нанаучно истражувачкиот проект DYSIMAC(DYnamic Simulation of the MACedonianPower Plants in a New Technological andMarket Environment) на Институтот заелектроенергетика при Универзитетот воРосток, СР Германија. Станува збор завиртуелен инструмент кој се употребуваза мерења на параметрите односно акви-зиција на податоците (Data acquisition-DAQ) во хидроелектрични централи, про-грамиран со софтверскиот пакет LabVI-EW.
Клучни зборови - виртуелни инструмен-ти, аквизиција на податоци, мерења
1.ВОВЕД
Co популаризирањето на програмскиотпакет LabVIEW во 1986 год. се развива новконцепт, со кој корисниците употребувај-ќи софтвер интегриран со мерен хардвери компјутер можат да дефинираат сопс-твени решенија за креирање виртуелнамерна инструментација [4].LabVIEW e програм сличен на модернитеразвојни околини Висуал C++ или VisuelBasic но се разликува во една многу важнакарактеристика. LabVIEW го употребуваграфичкиот програмски јазик G за да кре-
ира програми во форма на блок дијаграм.Во состав на овој програм влегуваат ек-стензивни библиотеки од функции и раз-војни алатки специјално дизајнирани зааквизиција на податоци и контрола намерни инструменти. Сите програми изра-ботени со LabVIEW ce наречени виртуел-ни инструменти (Vis-virtual instruments)затоа што нивниот изглед и начинот наманипулирање имитира вистински инстру-мент. Сепак, начинот на програмирање есличен со функциите од конвенционални-те текстуални програми. Според големброј корисници LabVIEW го забрзува раз-војот 4 до 10 пати во однос на традицио-налното текстуално програмирање. Lab-VIEW е екстремно интуитивен, лесен заучење и ги упростува комплексните зада-чи.
Секој VI се состои од следниве компонен-ти:• Фронт панел (Front Panel-интерактивен
кориснички интерфејс);• Блок дијаграм (Block diagram-ro содржи
графичкиот код, кој ја дефинира функ-ционалноста на VI);
• Икони (сликовна репрезентација навиртуелниот инструмент).
Фронт панелот (сл.1) е интерактивен ко-риснички интерфејс на виртуелен инстру-мент и симулира панел на физички ин-струмент. Тој може да содржи копчиња,прекинувачи, тастери, графови и другиконтролори и индикатори. Податоците севнесуваат со употреба на тастатура и
A - 7 5
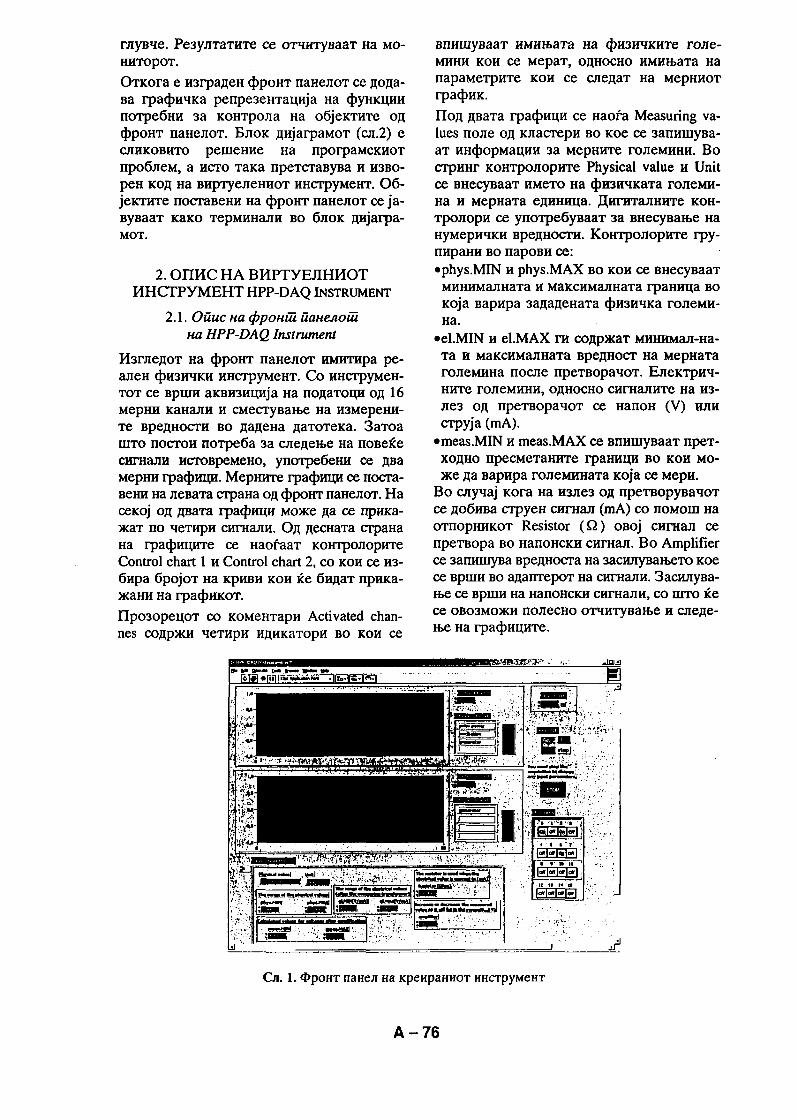
глувче. Резултатите се отчитуваат на мо-ниторот.Откога е изграден фронт панелот се дода-ва графичка репрезентација на функциипотребни за контрола на објектите одфронт панелот. Блок дијаграмот (сл.2) есликовито решение на профамскиотпроблем, а исго така претставува и изво-рен код на виртуелениот инструмент. Об-јектите поставени на фронт панелот се ја-вуваат како терминали во блок дијагра-мот.
2. ОПИС НА ВИРТУЕЛНИОТИНСТРУМЕНТ HPP-DAQ INSTRUMENT
2.1. Опис на фронт панелотна HPP-DAQ Instrument
Изгледот на фронт панелот имитира ре-ален физички инструмент. Co инструмен-тот се врши аквизиција на податоци од 16мерни канали и сместување на измерени-те вредности во дадена датотека. Затоашто постои потреба за следење на повеќесигнали истовремено, употребени се двамерни графици. Мерните графици се поста-вени на левата страна од фронт панелот. Насекој од двата графици може да ое прика-жат по четири сигнали. Од десната странана графиците се наоѓаат контролоритеControl chart 1 и Control chart 2, со кои се из-бира бројот на криви кои ќе бидат прика-жани на графикот.
Прозорецот со коментари Activated chan-пеѕ содржи четири идикатори во кои се
впишуваат имињата на физичките голе-мини кои се мерат, односно имињата напараметрите кои се следат на мерниотграфик.
Под двата графици се наоѓа Measuring va-lues поле од кластери во кое се запишува-ат информации за мерните големини. Востринг контролорите Physical value и Unitсе внесуваат името на физичката големи-на и мерната единица. Дигиталните кон-тролори се употребуваат за внесување нанумерички вредности. Контролорите гру-пирани во парови се:•phys.MIN и phys.MAX во кои се внесуваат
минималната и максималната граница вокоја варира зададената физичка големи-на.
•el.MIN и el.MAX ги содржат минимал-на-та и максималната вредност на мернатаголемина после претворачот. Електрич-ните големини, односно сигналите на из-лез од претворачот се напон (V) илиструја (тА).
•meas.MIN и теаѕ.МАХ се впишуваат прет-ходно пресметаните граници во кои мо-же да варира големината која се мери.
Во случај кога на излез од претворувачотсе добива струен сигнал (тА) со помош наотпорникот Resistor (Q) овој сигнал сепретвора во напонски сигнал. Bo Amplifierсе запишува вредноста на засилувањето коесе врши во адаптерот на сигнали. Засилува-ње се врши на напонски сигнали, со што ќесе овозможи полесно отчитување и следе-ње на графиците.
м
\am-r#y
Сл. 1. Фронт панел на креираниот инструмент
A - 7 6
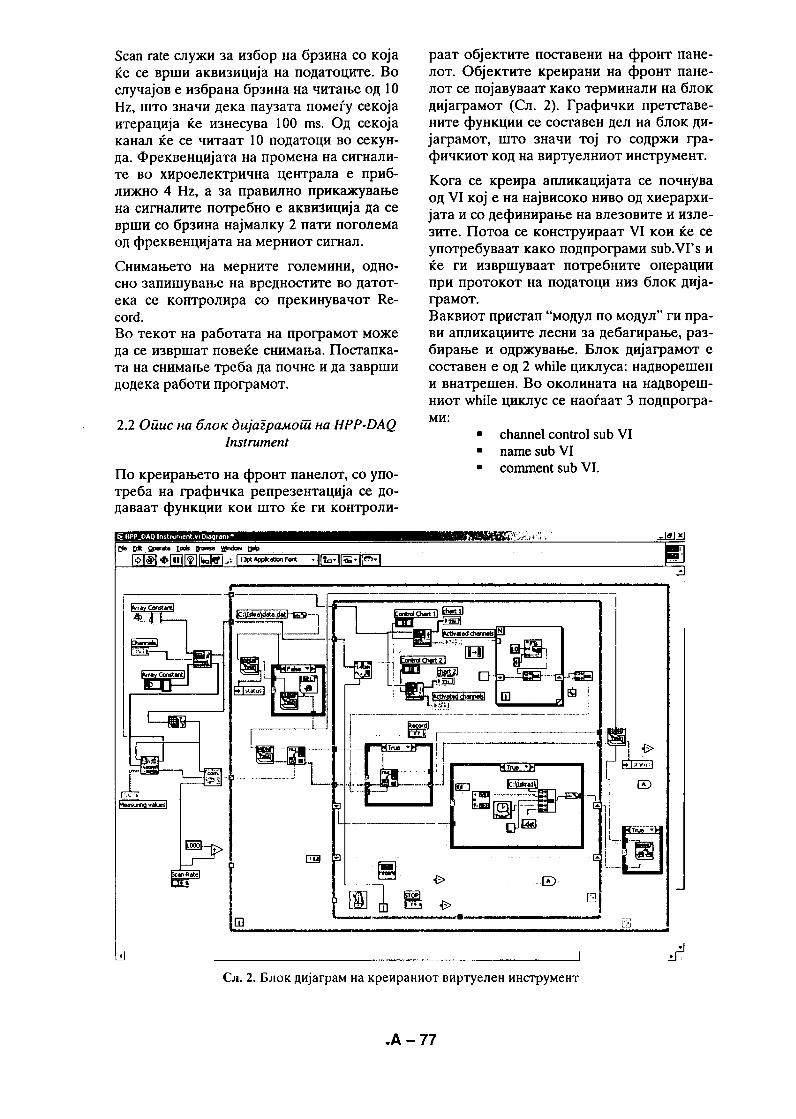
Scan rate служи за избор на брзина со којаќе се врши аквизиција на податоците. Вослучајов е избрана брзина на читање од 10Hz, што значи дека паузата помеѓу секојаитерација ќе изнесува 100 тѕ. Од секојаканал ќе се читаат 10 податоци во секун-да. Фреквенцијата на промена на сигнали-те во хироелектрична централа е приб-лижно 4 Hz, a за правилно прикажувањена сигналите потребно е аквиЗиција да севрши со брзина најмалку 2 пати поголемаод фреквенцијата на мерниот сигнал.
Снимањето на мерните големини, одно-сно запишување на вредностите во датот-ека се контролира со прекинувачот Re-cord.Bo текот на работата на програмот можеда се извршат повеќе снимања. Постапка-та на снимање треба да почне и да завршидодека работи програмот.
2.2 Опис на блок дијаграмот на HPP-DAQInstrument
По креирањето на фронт панелот, со упо-треба на графичка репрезентација се до-даваат функции кои што ќе ги контроли-
раат објектите поставени на фронт пане-лот. Објектите креирани на фронт пане-лот се појавуваат како терминали на блокдијаграмот (Сл. 2). Графички претставе-ните функции се составен дел на блок ди-јаграмот, што значи тој го содржи гра-фичкиот код на виртуелниот инструмент.
Кога се креира апликацијата се почнуваод VI кој е на највисоко ниво од хиерархи-јата и со дефинирање на влезовите и изле-зите. Потоа се конструираат VI кои ќе сеупотребуваат како подпрограми sub.VI'ѕ иќе ги извршуваат потребните операциипри протокот на податоци низ блок дија-грамот.Ваквиот пристап "модул по модул" ги пра-ви апликациите лесни за дебагирање, раз-бирање и одржување. Блок дијаграмот есоставен е од 2 while циклуса: надворешени внатрешен. Во околината на надвореш-ниот while циклус се наоѓаат 3 подпрогра-ми:
• channel control sub VI• name sub VI• comment sub VI.
look frnoie | h ] o a Цѕ|р
Сл. 2. Блок дијаграм на креираниот виртуелен инструмент
.А-77

Chanel control subVI- како влезна инфор-мација овој подпрофам го прима бројотна активирани канали, поточно кои кана-ли се вклучени на фронт панелот. Акти-вираните канали ги подредува во низа одкарактери која потоа се испраќа до функ-цијата AI Read One Scan.vi.[3]. Co оваафункција сигналите кои ги прима плочатаза аквизиција се носат до подпрограмотactivated channels subVI.
Name subVI- за него влезни информациисе податоците од measuring values од фронтпанелот и имињата на активните канали.Тука се врши подредување на редниотброј на активираниот канал со информа-
циите за мерната големина, ова е потреб-но за составување на датотеката со изве-штајот.
Влезни параметри за comment subVIподпрограмот се бројот на активираниканали, полето кое ги содржи инфор-мациите за вклучените мерни канали исцан рате-бројот со кој е дефиниранабрзината на отчитување на вредности-те. Подпрограмот целосно го доофор-мува информативниот дел од извешта-јот (Сл. 3).
ok 01.07.02 at 13:11:21 k.
h o t tax» Ob] :10
mDO
0,000 500,0000,000 500,0000,000 3OO0,«OO
•1 JllStV/кД] «1.MKCVJM] fci*l*t»r COfc^ шф11£]*Е I M ^ J C V iHkslfl
0,000 »0,000 0,000 0,020 0,000 5,0000,000 20,000 200,000 1,000 0,000 4,0000,000 10,000 500,000 1,000 0,000 5,000
•0,40(51,1753
-1,00771,2(311,(704
-0,2»250,««U1,(340
•«,«11
1,51»
-0,3311•0,2925
1,51S(1,5135
1,51051,51091,51121,51171,51121,51211,51131,5111
3,1(573,1(173,1И2
l',UM3,1(573,1(543,1(54
],1M53.1M73,1M]3,1(003,1871
Сл. З. Изглед на извештајот
Bo надворешниот While циклус, се вршиотворање на датотека и запишување наинформативниот дел од извештајот во таапривремена датотека (во дадениот случајC:\Iskra\data.dat). Во внатрешниот while ци-клус се сместени уште три подпрограми:
• activated ch. subVI• record flag subVI• time sub.VI
Подпрограмот activated ch.subVI врши об-работка на влезните податоци, односнонивно трансформирање во определен типкој може да се приклучи на терминалитеод фронт панелот. Подпрограмот е упо-требен два пати за секој од дисплеите одфронт панелот посебно.
Подпрограмот recod flag subVI врши ана-лиза на влезните параметри, односно ко-мандите зададени од фронт панелот. Под-програмот ја контролира и структурата
каде што се создава новата датотека одследниот вид: C:\Iskral\24.06.02_ll-46-19.dat. во која се префрлуваат информа-тивниот извештај и се заггашуваат коло-ните со измерени вредности. Името на да-тотеката е составено од датумот и време-то, и се креира во моментот кога почналеда се запишуваат-снимаат првите измере-ни вредности, односно кога копчето "Re-cord" ќе се префрли во положба "Start".Една од функциите на подпрограмот recordflag sub.VI e креирање на новата датотекасамо во моментот кога ќе се вклучи "Re-cord", а креирањето да не се повторува восекоја итерација.
Подпрограмот timesub.VI го составува име-то на новата датотека
кое се добива во следниот облик24.06.02_11-46-19. Името ги содржи дату-
А-78
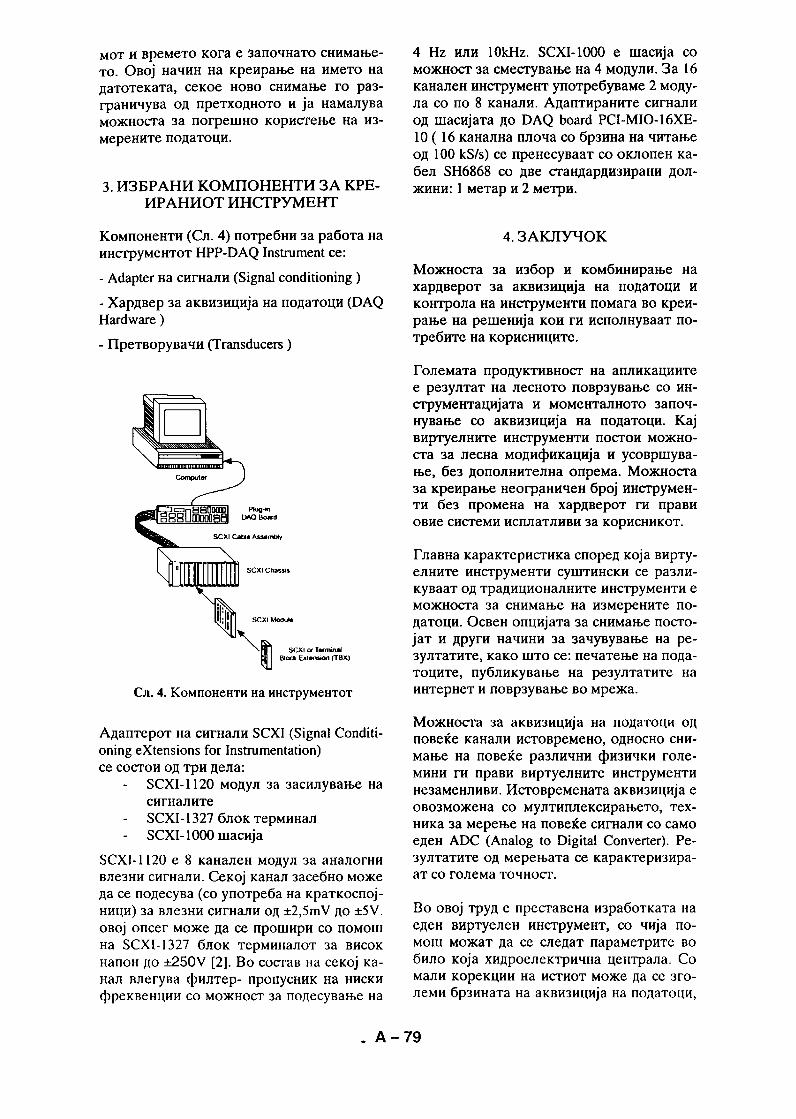
мот и времето кога е започнато снимање-то. Овој начин на креирање на името надатотеката, секое ново снимање го раз-граничува од претходното и ја намалуваможноста за погрешно користење на из-мерените податоци.
3. ИЗБРАНИ КОМПОНЕНТИ ЗА КРЕ-ИРАНИОТ ИНСТРУМЕНТ
Компоненти (Сл. 4) потребни за работа наинструментот HPP-DAQ Instrument ce:
- Adapter на сигнали (Signal conditioning )
- Хардвер за аквизиција на податоци (DAQHardware)
- Претворувачи (Transducers)
D 11
SCXI or TarminalBlock Ejlanskxi (ТВХ)
Сл. 4. Компоненти на инструментот
Адаптерот на сигнали SCXI (Signal Conditi-oning extensions for Instrumentation)ce состои од три дела:
SCXI-1120 модул за засилување насигналите
- SCXI-1327 блок терминал- SCXI-1000 шасија
SCXI-1120 е 8 канален модул за аналогнивлезни сигнали. Секој канал засебно можеда се подесува (со употреба на краткоспој-ници) за влезни сигнали од ±2,5mV до ±5V.овој опсег може да се прошири со помошна SCXI-1327 блок терминалот за високнапон до ±250V [2]. Bo состав на секој ка-нал влегува филтер- пропусник на нискифреквенции со можност за подесување на
4 Hz или 10kHz. SCXI-1000 е шасија соможност за сместување на 4 модули. За 16канален инструмент употребуваме 2 моду-ла со no 8 канали. Адаптираните сигналиод шасијата до DAQ board PCI-MIO-16XE-10 ( 16 канална плоча со брзина на читањеод 100 кЅ/ѕ) се пренесуваат со оклопен ка-бел ЅН6868 со две стандардизирани дол-жини: 1 метар и 2 метри.
4. ЗАКЛУЧОК
Можноста за избор и комбинирање нахардверот за аквизиција на податоци иконтрола на инструменти помага во креи-рање на решенија кои ги исполнуваат по-требите на корисниците.
Големата продуктивност на апликациитее резултат на лесното поврзување со ин-струментацијата и моменталното започ-нување со аквизиција на податоци. Кајвиртуелните инструменти постои можно-ста за лесна модификација и усовршува-ње, без дополнителна опрема. Можностаза креирање неограничен број инструмен-ти без промена на хардверот ги правиовие системи исплатливи за корисникот.
Главна карактеристика според која вирту-елните инструменти суштински се разли-куваат од традиционалните инструменти еможноста за снимање на измерените по-датоци. Освен опцијата за снимање посто-јат и други начини за зачувување на ре-зултатите, како што се: печатење на пода-тоците, публикување на резултатите наинтернет и поврзување во мрежа.
Можноста за аквизиција на податоци одповеќе канали истовремено, односно сни-мање на повеќе различни физички голе-мини ги прави виртуелните инструментинезаменливи. Истовремената аквизиција еовозможена со мултиплексирањето, тех-ника за мерење на повеќе сигнали со самоеден ADC (Analog to Digital Converter). Pe-зултатите од мерењата се карактеризира-ат со голема точност.
Во овој труд е преставена изработката наеден виртуелен инструмент, со чија по-мош можат да се следат параметрите вобило која хидроелектрична централа. Coмали корекции на истиот може да се зго-леми брзината на аквизиција на податоци,
A - 7 9
можат директно да се пресметуваат еле- [2] National Instruments Corporation: Getting Star-ктричните величини во физички големи- t ed with SCXI, 1996
ни и no желба да се складираат во нова да- [ 3] National Instruments Corporation: Lab VIEWтотека. Function and VI Reference Manual, 1999.
[4] National Instruments Corporation: Quick Start5.ЛИТЕРАТУРА Guide, 1999.
[1] National Instruments Corporation: Data Acquisi-tion Basic Manual, 1998.
Summary
VIRTUAL INSTRUMENTS FOR MONITORING THE PROCESSES INPOWER ENGINEERING FACILITIES
Iskra Dimova, Atanas Iliev, Ljubisa Mladenovski, Vangel Fustik
Faculty of Electrical Engineering - Skopje, Karpos II, b.b. P.O. Box 574, 1000 Skopje, [email protected], [email protected], [email protected], [email protected]
In this paper is presented the method for program- Market Environment). It is used for data acquisition-ming and creating virtual instruments. It also presents measuring the parameters in hydro power plants, pro-the implementation of these instruments in power en- grammed with the software package Lab VIEW,gineering. The instrument was designed with in theproject DYSIMAC (Dynamic Simulation of the Ma- Key words - Virtual instrument, ,data acquisition,cedonian Power Plants in a New Technological and measurements.
A - 8 0
Шесша национална конференција со меѓународно учесшво ЕТАИ1003Sixth National Conference With International Participation ЕТАГ2003
Охрид, Република МАКЕДОНИЈА - Ohrid, Republic of MACEDONIA17-20.1X2003
MK0600057
МОДЕЛИРАЊЕ HA ХИДРО^ГРЕГАТОТBO ХЕЦ ТИКВЕШ CO ПРОГРАМСКИОТ ПАКЕТ
MATLAB/SIMULINK
Невенка Китева, Александра Крколева, Игор Новевски, Атанас Илиев, Вангел Фуштиќ
Електротехнички факултет - Скопје, Карпош 2, б.б. П. Фах 574, 1000 Скопје, тел. 02 3099 [email protected], [email protected], [email protected], [email protected],
Извадок - Bo услови на либерализацијана пазарот на електрична енергија, коганезависни производители замаат учество вопокривање на потребите на потрошувачитеод електрична енергија на тежина добивауправувањето и планирањето на развојотна електроенергетските системи (EEC).
Управувањето на сложените системи, ка-ков што е и електроенергетскиот, значи-телно ќе се олесни ако се користат комп-јутерски модели кои може да се создаваатсо помош на разлнчни софтверски пакети.Создавањето на компјутерски симулацио-нен модел за секоја од електричните цен-трали (ЕЦ) во системот и нивно вклучува-ње во еден сбопфатен модел овозможувапредвидување на однесувањето на ЕЦ ка-ко и на електроенергетските системи воразлични режими на работа.
Во овој труд е прикажан компјутерски си-мулационен модел на агрегат со Францистурбина инсталиран во ХЕЦ Тиквеш, ре-зултатите добиени при симулација на мо-делот како и анализа на точноста и довср-ливоста на развиениот модел.
Клучни зборови: моделирање, хидроагре-гат, симулација.
1.ВОВЕД
Во сценаријата за стабилност на еле-ктричните мрежи, обично, се работи соприлично едноставни модели на еле-ктричните централи, оптоварувањата иопремата за контрола и заштита. Обично
параметрите на овие модели се определу-ваат само во груби граници. Ваквите мо-дели се доволно точни за проучување наглобалното однесување на електроенер-гетските системи. Но, кога е потребно дасе анализираат причините за распад наелектроенергетските мрежи и начинитеза нивното повторно воспоставување, не-опходно е да се користат многу попрециз-ни и практично-ориентирани модели [1].Досега, модели од ваков тип се изработе-ни за две хидроцентрали во Македонија,"Вруток" [3,4] и "Тиквеш".
Во трудот се дава опис на динамичкиотмодел на хидроагрегатот инсталиран вохидроцентралата "Тиквеш" изработен сопрограмскиот пакет MATLAB [6]. Во негое дадена и споредбата на резултатите до-биени од моделот со претходно извршени-те мерења во централата [2], со помош наLabView хардверската конфигурација наNational Instruments. Резултатите од пра-ктичните мерења, меѓу другото, даваат ислика за состојбите во хидроцентралата ипомагаат при донесување на одлука за но-ви инвестиции и набавка на опрема.
2. ОСНОВНИ ПОДАТОЦИЗА ХЕЦ ТИКВЕШ
Хидроелектричната централа "Тиквеш" елоцирана на кањонот на реката Црна, воблизина на Кавадарци. Нејзиното средно-годишно производство на електрична ен-ергија изнесува 136GWh , а оваа хидроцен-трала учествува и во секундарната регула-ција на фреквенцијата во електроенерг-тскиотсистем на Македонија [7].
.А-81
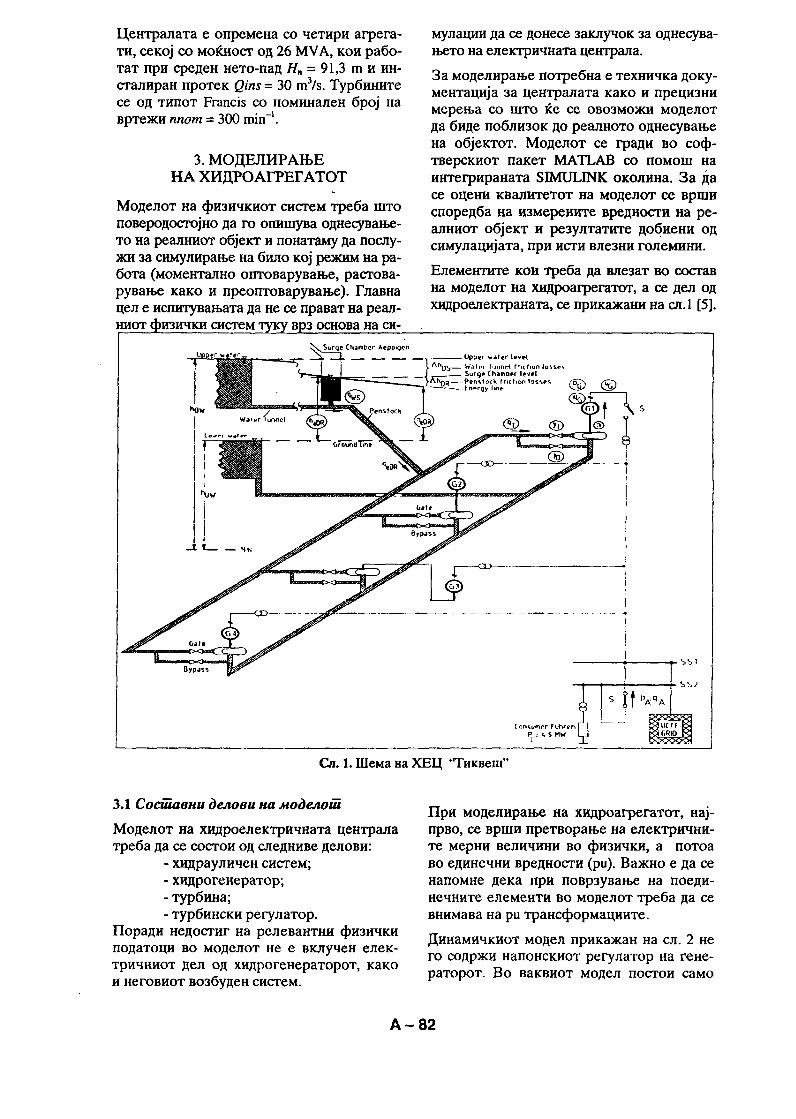
Централата е опремена со четири агрега-ти, секој со моќност од 26 MVA, кои рабо-тат при среден нето-пад Нп = 91,3 m и ин-сталиран протек Qins = 30 m3/s. Турбинитесе од типот Francis co номинален број навртежи ппотп = 300 min"1.
3. МОДЕЛИРАЊЕНА ХИДРОАГРЕГАТОТ
Моделот на физичкиот систем треба штоповеродостојно да го опишува однесување-то на реалниот објект и понатаму да послу-жи за симулирање на било кој режим на ра-бота (моментално оптоварување, растова-рување како и преоптоварување). Главнацел е исшпувањата да не се прават на реал-ниот физички систем туку врз основа на си-
мулации да се донесе заклучок за однесува-н>ето на електричната централа.
За моделирање потребна е техничка доку-ментација за централата како и прецизнимерења со што ќе се овозможи моделотда биде поблизок до реалното однесувањена објектот. Моделот се гради во соф-тверскиот пакет MATLAB со помош наинтегрираната SIMULINK околина. За дасе оцени квалитетот на моделот се вршиспоредба на измерените вредности на ре-алниот објект и резултатите добиени одсимулацијата, при исти влезни големини.
Елементите кои треба да влезат во составна моделот на хидроагрегатот, a ce дел одхидроелектраната, се прикажани на сл. 1 [5].
IPOer Upyer v j ter levelWalur I'jfiniH f'ufionSurge (hanDrrPenstock fritliofi
Гспчипрг Fuhre
Сл. 1. Шема на ХЕЦ 'Тиквеш"
3.1 Сосшавни делови на моделош
Моделот на хидроелектричната централатреба да се состои од следниве делови:
- хидрауличен систем;-хидрогенератор;- турбина;- турбински регулатор.
Поради недостиг на релевантни физичкиподатоци во моделот не е вклучен елек-тричниот дел од хидрогенераторот, какои неговиот возбуден систем.
При моделирање на хидроагрегатот, нај-прво, се врши претворање на електрични-те мерни величини во физички, а потоаво единечни вредности (ри). Важно е да сенапомне дека при поврзување на поеди-нечните елементи во моделот треба да севнимава на ри трансформациите.
Динамичкиот модел прикажан на сл. 2 него содржи напонскиот регулатор на гене-раторот. Во ваквиот модел постои само
A - 8 2

еден влез, произведената активната моќ-ност Pg , изразена преку подесените вред-ности за позицијата на лопатките на спро-водното коло на турбината.
Сл. 2. Динамички модел на хидрагрегатот
Излези на моделот се:• брзината на вртење на генерато-
ротп;• позиција на лопатките на спровод-
ното коло на турбината yt;
• притисокот на водата на влез вотурбината h«;
• протек на вода низ турбината q;Bo моделот постојат поголем број пара-метри и константи кои по креирањето намоделот треба да се идентификуваат. Ни-вната идентификација се прави во про-грамскиот пакет MATLAB со помош наизмерените резултати при обидот да сесимулира истото однесување на агрегатоткакво што било и при снимање на резул-татите.
3.1.1 Хидраулинен дел
Хидрауличниот дел на електричната цен-трала го вклучува системот за довод навода од зафатот (Тиквешкото Езеро) довлезот на машинската зграда. Во хидрау-личниот систем за довод на вода нема во-достан и тунел под притисок што значидека во моделот влегува само цевководпод притисок.
Сл. 3. Модел на хидрауличен систем и генератор
Влезови во овој дел на моделот се:• Нивото на езерото how = 1;• Површината на отворот на турби-
ната ат =fiy,);Моделот на цевководот може да ја симу-лира инерцијата на водата, претставена современската константа на инерција Twdr.Константата Twdre значајна за опишувањена однесувањето на хидрауличниот системна хидроцентралата од кинетички аспект исе определува со следната релација:
'•On
ниот протек и номиналната висина соод-ветно. Временската константа Т{ ѕшг којае употребена во динамичкиот дел на хи-драуличниот модел може да се пресметаспоред следнава равенка:
' / star ~ •2-7.
(2)wdr
л-LO Pa e
Twdr ~ - (1)
каде / и A ce должината и пресекот на до-водот на вода, додека Qn и Н„ се номинал-
J , додека *- =константа на компресибилност.
Коефициентот Rdr претставува коефици-ент на загуби во цевководот под прити-сок. Неговата вредност изнесува 2,5%.
- A - 8 3
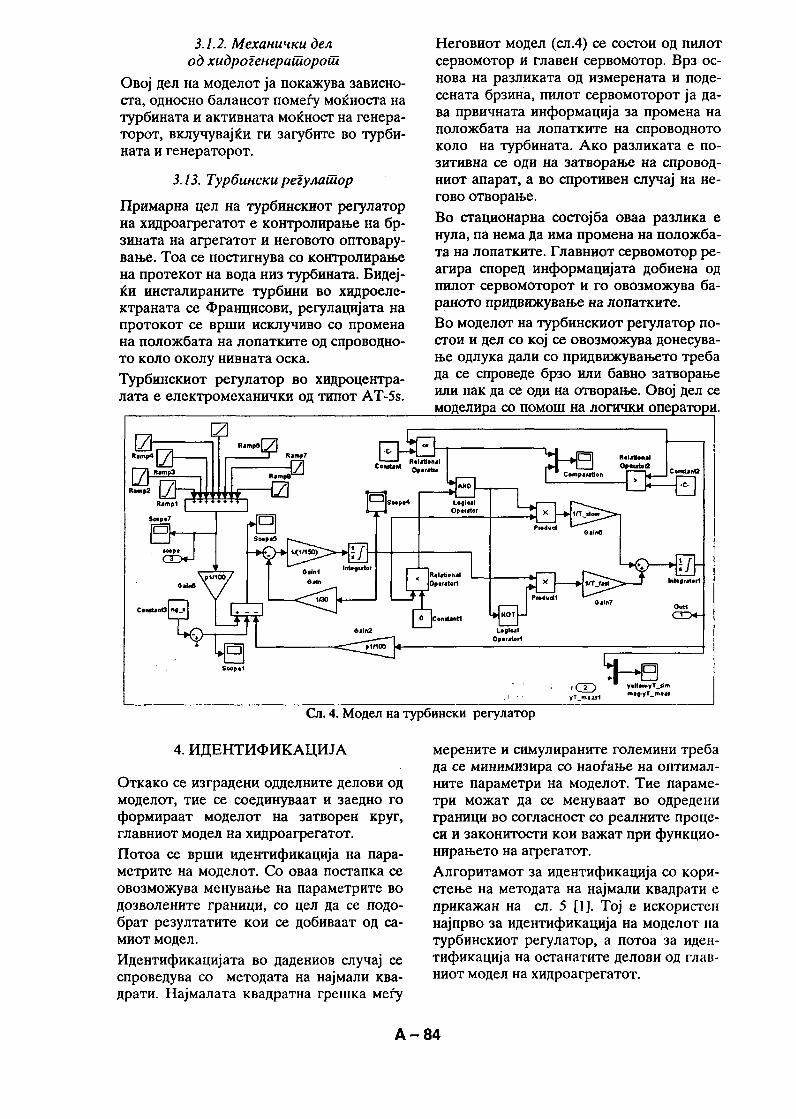
3.1.2. Механички делод хидрогенераторот
Овој дел на моделот ја покажува зависно-ста, односно балансот помеѓу моќноста натурбината и активната моќност на генера-торот, вклучувајќи ги загубите во турби-ната и генераторот.
3.13. Турбински регулатор
Примарна цел на турбинскиот регулаторна хидроагрегатот е контролирање на бр-зината на агрегатот и неговото оптовару-вање. Тоа се постигнува со контролирањена протекот на вода низ турбината. Бидеј-ќи инсталираните турбини во хидроеле-ктраната се Францисови, регулацијата напротокот се врши исклучиво со променана положбата на лопатките од спроводно-то коло околу нивната оска.
Турбинскиот регулатор во хидроцентра-лата е електромеханички од типот АТ-5ѕ.
Неговиот модел (сл.4) се состои од пилотсервомотор и главен сервомотор. Врз ос-нова на разликата од измерената и поде-сената брзина, пилот сервомоторот ја да-ва првичната информација за промена наположбата на лопатките на спроводнотоколо на турбината. Ако разликата е по-зитивна се оди на затворање на спровод-ниот апарат, а во спротивен случај на не-гово отворање.
Во стационарна состојба оваа разлика енула, па нема да има промена на положба-та на лопатките. Главниот сервомотор ре-агира според информацијата добиена одпилот сервомоторот и го овозможува ба-раното придвижување на лопатките.Во моделот на турбинскиот регулатор по-стои и дел со кој се овозможува донесува-ње одлука дали со придвижувањето требада се спроведе брзо или бавно затворањеили пак да се оди на отворање. Овој дел семоделира со помош на логички оператори.
Ѕоор«1
Сл. 4. Модел на турбински регулатор
4. ИДЕНТИФИКАЦИЈА
Откако се изградени одделните делови одмоделот, тие се соединуваат и заедно гоформираат моделот на затворен круг,главниот модел на хидроагрегатот.Потоа се врши идентификација на пара-метрите на моделот. Co оваа постапка сеовозможува менување на параметрите водозволените граници, со цел да се подо-брат резултатите кои се добиваат од са-миот модел.
Идентификацијата во дадениов случај сеспроведува со методата на најмали ква-драти. Најмалата квадратна грешка меѓу
мерените и симулираните големини требада се минимизира со наоѓање на оптимал-ните параметри на моделот. Тие параме-три можат да се менуваат во одредениграници во согласност со реалните проце-си и законитости кои важат при функцио-нирањето на агрегатот.
Алгоритамот за идентификација со кори-стење на методата на најмали квадрати еприкажан на сл. 5 [I]. Toj e искористеннајпрво за идентификација на моделот натурбинскиот регулатор, а потоа за иден-тификација на останатите делови од глав-ниот модел на хидроагрегатот.
A - 8 4
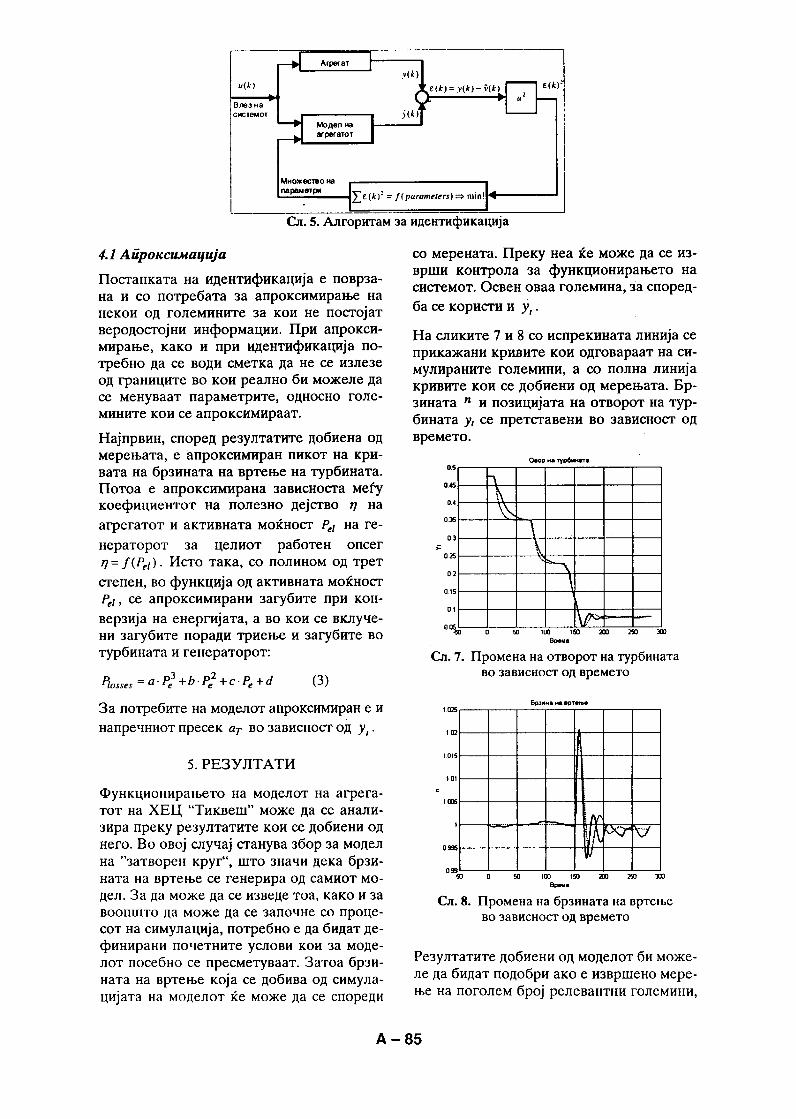
Сл. 5. Алгоритам за идентификација
4.1 Апроксимација
Постапката на идентификација е поврза-на и со потребата за апроксимирање нанекои од големините за кои не постојатверодостојни информации. При апрокси-мирање, како и при идентификација по-требно да се води сметка да не се излезеод границите во кои реално би можеле дасе менуваат параметрите, односно голе-мините кои се апроксимираат.
Најпрвин, според резултатите добиена одмерењата, е апроксимиран пикот на кри-вата на брзината на вртење на турбината.Потоа е апроксимирана зависноста меѓукоефициентот на полезно дејство т] наагрегатот и активната моќност Ре1 на ге-нераторот за целиот работен опсегV = f(pei) • Исто така, со полином од третстепен, во функција од активната моќностРе1, се апроксимирани загубите при кон-верзија на енергијата, а во кои се вклуче-ни загубите поради триење и загубите вотурбината и генераторот:
Plosses =a-Pg +b-Pg +C-Pe+d (3)
За потребите на моделот апроксимиран е инапречниот пресек ат во зависност од у,.
5. РЕЗУЛТАТИ
Функционирањето на моделот на агрега-тот на ХЕЦ "Тиквеш" може да се анали-зира преку резултатите кои се добиени однего. Во овој случај станува збор за моделна "затворен круг", што значи дека брзи-ната на вртење се генерира од самиот мо-дел. За да може да се изведе тоа, како и завоопшто да може да се започне со проце-сот на симулација, потребно е да бидат де-финирани почетните услови кои за моде-лот посебно се пресметуваат. Затоа брзи-ната на вртење која се добива од симула-цијата на моделот ќе може да се спореди
со мерената. Преку неа ќе може да се из-врши контрола за функционирањето насистемот. Освен оваа големина, за според-ба се користи и у,.
На сликите 7 и 8 со испрекината линија сеприкажани кривите кои одговараат на си-мулираните големини, a co полна линијакривите кои се добиени од мерењата. Бр-зината п и позицијата на отворот на тур-бината у, се претставени во зависност одвремето.
04
0 35
0 3
025
0 2
0 1Ѕ
01
00Ѕ100 150
8р«ме
Сл. 7. Промена на отворот на турбинатаво зависност од времето
1
SO IX 150 200 ?Ѕ0 300
Сл. 8. Промена на брзината на вртењево зависност од времето
Резултатите добиени од моделот би може-ле да бидат подобри ако е извршено мере-ње на поголем број релевантни големини,
A - 8 5

со што би се овозможило контролирањена повеќе делови од моделот. Ова би гонамалило и бројот на извршени апрокси-мации во моделот и секако би ја зголеми-ло неговата прецизност.
6. ЗАКЛУЧОК
Во овој труд е прикажана начинот на кре-ирање на модел на хидроагрегат со корис-тење на програмскиот пакет MATLAB-SI-MULINK.
Анализите направени со помош на ваковмодел овозможуваат испитување на одне-сувањето на хидроелектричната централаза различни работни режими без да се на-рушува предвидениот возен ред на хидро-електраната. Co помош на моделот можеда се вршат анализи и на можни опаснисостојби како што се лојава на куси врскиили преоптоварувања. Симулирањето наовие режими на моделот, однапред ќе гоподготви тимот во централата за соодвет-на реакција, во случај ако тој настан сеслучи во текот на експлоатацијата на об-јектот. Секако, за да ја изврши својата ос-новна намена, моделот на хидроагрегатоттреба да биде доверлив во целиот работенопсег, со што ќе овозможи исправна ана-
лиза и донесување правилни заклучоци прирешавањето на практичните проблеми.
7. ЛИТЕРАТУРА
[1] Н. Weber, V. Fustik, F. Prillwitz, A. Iliev:Practically oriented simulation model for theHydro Power Plant "Vrutok" in Macedonia,Proceedings of Second Balkan Power.Conference BPC 2002, Beograd, 19-22 June2002. pp. 261-266
[2] B. Фуштиќ, A. Илиев, X. Вебер, Ф. Прил-виц, И. Куковски, Е. Бекири: Испитувањена динамичките карактеристики на хидро-агрегатот А во ХЕЦ Вруток, Трето Сове-тување на МАКО СИГРЕ, Книга IV,Реф.39-01, Охрид, 3-6 октомври, 2001 год.
[3] V. Fustik, A. Iliev, H. Weber, F. Prillwitz:Dynamic Characteristics of the Unit A in HPPVrutok in Islanded Operation, 6-th InternationalConference Electrical Power Quality andUtilisation, Cracow, 19-21 September 2001.
[4] V. Fustik, H. Weber, A. Iliev, F. Prillwitz:Dynamic Characteristics of the Unit A in HPPVrutok, 1st Balkan Power Conference, PowerSystem control and deregulation of electricity mar-ket, pp.292-29731ed, 24-26 September, 2001.
[5] HPP Zvornik Report-Uni Rostock
[6] MATLAB User Manual, The Math Works, Inc.
[7] Техничка документација на ХЕЦ "Тиквеш".
Summary
MODELLING OF THE HYDRO UNIT OF THE POWER PLANTTIKVES BY MATLAB/SEMULINK PROGRAM PACKAGE
Nevenka Kiteva, Aleksandra Krkoleva, Igor Novevski, Atanas Iliev, Vangel Fustik
Faculty of Electrical Engineering - Skopje, Karpos II, b.b. P.O.Box 574, 1000 [email protected]. alekk [email protected]. [email protected].
[email protected]. [email protected]
Keywords - modeling, hydro unitt, simulation
The liberalization of the energy market allows theindependent producers of energy to take part in cov-ering the needs of the consumers. This process willmake the operation, as well as the planning of theelectric power systems more complicated and moredifficult.
Usage of the various kinds of practically orientedmodels, created with the available software, hasmany advantages. Creating simulation models for allthe power plants in the system and connecting them
into one complete model allow analyses for the be-havior of the power plants and the behavior of thewhole power system for different operational re-gimes.
This paper shows a simulation model of the hydrounit with a Francis turbine, installed in HPP Tikves,the results from the simulation and an overview ofthe reliability of the obtained model.
A - 8 6
Шесша национална конференција со меѓународно учесшво ЕТАЈР2003Sixth National Conference With International Participation ЕТАГ2003
Охрид, Република МАКЕДОНИЈА - Ohrid, Republic of MACEDONIA17-20. IX 2003
MK0600058
НЕУРО-ФАЗИ МОДЕЛИРАЊЕ HA КОЕФИЦИЕНТОТHA ПОЛЕЗНО ДЕЈСТВО HA ХИДРОАГРЕГАТОТ
Атанас Илиев, Вангел Фуштиќ
Електротехнички факултет - Скопје, Карпош II, б.б. П. Фах 574, 1000 Скопје,[email protected]; [email protected]
Извадок - Во овој труд е прикажан неуро-фази метод за моделирање на коефициен-тот на полезно дејство на хидроагрегатот.Методот ги користи карактеристнките нафази-логичките системи како универзалниапроксиматори на функцни и можноститена невронските мрежи за подесување нафункциите на припадност и правилата вопоследичниот дел на фази-системот. Раз-виениот модел базира на позната база наподатоци за протекот на вода низ турбинаи нето висинскиот пад, како влезни вели-чини, и коефициентот на полезно дејствона хидроагрегатот, како излезна величина.
Предложениот метод практично е приме-нет за моделирање на коефициентот наполазно дејство на агрегат од хидроеле-ктричната централа Козјак, Исто така, из-вршена е споредба на перформансите нановиот неуро-фази модел со неколку кла-сични полиномни модели.
Клучни зборови — моделирање, хидроагре-гат, фази систем, невронски мрежи, ефи-касност.
1. ВОВЕД
Моделирањето на коефициентот на полез-но дејство (к.п.д.) на хидрогрегатот е ва-жен чекор во пресметка на можното про-изводство на електрична енергија. Ефи-
касноста на хидроагрегатот во постоечки-те, класични методи се претставува какополиномна функција од расположливиотнето пад и потрошувачката на вода низтурбината. Вообичаено, коефициентите наполиномот се пресметуваат со методот нанајмали квадрати. Овој метод дава добрирезултати за константна вредност на нетопадот или, пак, за мали промени на нетопадот околу претходно определена точка.Но, ако истата формула се употреби запресметка на коефициентот на полезнодејство на агрегатот за поширок опсег напромена на нето-падот, добиените резул-тати не се секогаш прифатливи.
Новиот техничко-технолошки развој и по-јавата на современи методи и техники ка-ко што се фази-логиката и невронскитемрежи создадоа нови можност за подобру-вање на карактеристиките на развиенитемодели. Така, Коѕко [1], покажал дека фа-зи-системите можат да апроксимираат би-ло која реална континуирана функција накомпактен домен со било кој степен наточност. Понатаму, познато е дека адаптив-ниот мрежно базиран фази-систем за доне-сување заклучоци има корисни особини даучи и да се усовршува од расположливитеподатоци [7]. Така, со цел да се добие по-прецизна апроксимација која е независнаод моделот, може да се применат неврон-ските мрежи за да ги подесат параматритена влезните и излезните функции на при-
А-87

падност на веќе развиениот фази-системза донесување заклучоци [2].
Фази-моделирањето на нелинеарни функ-ционални зависности е широко истражува-на и верификувана дисциплина во рамкитена фази логиката. Бројните објавени тру-дови за конструкцијата и идентификацијана фази-системи, кои базираат на множес-тво на влезно-излезни податоци [4,6] вопотполност го потврдуваат оваа тврдење.Меѓутоа, во многу трудови верификација-та на моделите се врши на веќе познатинелинеарни математички равенки. Така,на пример, во [4, 5], како тест пример замоделирање на статичка нелинеарна за-висност служи равенката:
y = (l+jcj~2+;cj1>5)2, a во [4] и равенката
неарна функција од нето падот (//„) и по-трошувачката на вода низ турбината (Q).
Моделирањето, во овој случај, ќе базирана реален физички систем ХЕЦ Козјак,која е во завршна изградба. Верификација-та на моделот ќе се врши со споредба насимулираните и пресметаните вредностиза коефициентот на полезно дејство на хи-дроагрегатот.
Главна цел е да се иницира нов, пофлекси-билен пристап (во споредба со класични-от), за моделирање на коефициентот наполезно дејство на хидроагрегатот бази-ран на т.н. soft computing [3], а во кој ќе би-дат вклучени најдобрите особини на фази-системите и невронските мрежи.
2. МОДЕЛ НА ХИДРОАГРЕГАТОТ
Хидроагрегатот има задача да ја транс-формира потенцијалната и кинетичкатаенергија на водата од акумулациониот ба-зен, најпрвин во механичка енергија (вотурбината), а потоа и во електрична енер-гија (во генераторот). Овие енергетскипроцеси на трансформација, од еден виденергија во друг, нераскинливо се поврза-ни со загуби на енергија, во секој степен натрансформација. Така, вкупниот степен наполезно дејство на хидроагрегатот (j]ag) e
дефиниран како производ на к.п.д. на тур-бината (ТЈ, ) и к.п.д. на генераторот (rjg ):
rlag=Tlt'rlg ( 0
Зависноста на коефициентот на полезнодејство на турбината (т),) е сложена нели-
C(niVs)' i
85 90 95 100
Сл. 1. Типичен топографски дијаграмна Францис турбина
Оваа зависност, обично, во фазата на про-ектирање се конструира врз база на распо-ложливите карактеристики на моделнитетурбини, додека за изградените хидроелек-трични централи е дадена во графичкаформа со т.н. топографски дијаграм натурбината. На сл.1 е прикажан типичен то-пографскиот дијаграм на Францисова тур-бина тип F90.
Коефициентот на полезно дејство на гене-раторот се задава или како функција одизлезната моќност на турбината што исто-времено претставува и влезна моќност нагенераторот rjg = f(P,), или како функција
од излезната моќност на генераторот:rjg = f(Pg). Типичниот изглед на каракте-
ристиката на полезно дејство на хидроге-нераторот во зависност од оптоварување-то како процент од номиналното оптова-рување е прикажан на сл. 2.
П, 0,99
0,98
0,97
0,9660% 70% 80% 90% 100%
Сл.2. Типичен изглед на карактеристика на по-лезно дејство на хидрогенератор
///
А-88
3. МОДЕЛИРАЊЕ НА КОЕФИЦИЕН-ТОТ HA ПОЛЕЗНО ДЕЈСТВО
ANFIS (Adaptive-Network-Fuzzy Inference Sys-tem) [2] ги обединува најдобрите каракте-ристики на невронските мрежи и фази-ло-гичките системи и претставува погоднаалатка з,а моделирање на податоци со ви-сок степен на нелинеарност. Главна карак-теристика на невронските мрежи е што сеподложни на процес на учење со цел што еможно поблиску да го доближат модели-раниот податок до познатиот (условно то-чен) влезен податок. Невронските мрежисо повратна спрега (feedback) континуира-но можат да учат, класифицираат и гене-рираат нови влезно-излезни податоци. Тиеимаат можност да го прифатат новото зна-ење, интелигенција да учат од самите себе,да се прилагодат и адаптираат во соглас-ност со новите услови.
Влезни променливи при моделирањето, вонашиот случај, се нето висинскиот пад накој работи агрегатот и протекот на воданиз турбината, додека излезна ггроменливае к.п.д. на агрегатот. Процесот на модели-рање базира на постоење на колекција намерени/пресметани влезно/излезни пода-тоци за различни стационарни режими нахидроагрегатот [10]. ANFIS методот во се-бе содржи постапка, која обезбедува фази-моделот да учи од информациите содржа-ни во расположивата база на податоци.
Принципиелната шема на фази-системот задонесување заклучоци, познат уште и какофази-систем базиран на правила (Fuzzy Infe-rence System-FIS) e прикажана на сл. 3.
Влез(Q. Hn)
^ >
cnsp)
Фазифи-KauHja
База на знаење
База налодатоцн
(fuzzy)
База направнла
Модул задонесување одлуки
Дефази-фикација
(fuzzy)
Излез
(ч)•=>(crisp)
Сл. 3. Принципиелна шема на фази-систем задонесување заклучоци
За формирање на ANFIS моделот за ефи-касноста на хидроагрегатот е употребенпрограмскиот пакет MatLab [8], односнонеговиот модул Fuzzy Logic Toolbox [9]. Ка-ко дефазификационен метод е употребенметодот на тежински просеци. Типични-те фази правила за Sugeno моделот од прв
ред, кои се употребени во ова истражува-ње, ја имаат следнава форма:
If Q is A and tf „ is B Then 7} = pQ + qHn + r (2)
каде што:
A, B - фази множества во причинскиот(антецедентниот) дел на правилото,p,q,r - реални константи.
Карактеристично за овој модел е што пос-ледичниот дел од правилата е опишан сообична (не фази) равенка која е функцијаод влезните променливи. Излезот на креи-раниот фази систем за донесување заклу-чоци за моделирање на к.п.д. на агрегатот,според моделот од прв ред на Sugeno ceпресметува со помош на равенката:
ieF
_ i6 F
ieF
каде што:
(3)
F- множество на активни правила заб = 0.-и H=Hni
о - ознака за усвоената Т-норма (која нај-често е операцијата множење или опера-цијата минимум).
За да се употреби ANFIS модулот во про-грамскиот пакет MatLab Fuzzy Logic Tool-box потребно е:- Доверлива и квалитетна база на влез-
но/излезни податоци погодни за развојна потребниот модел;
- Да се изврши поделба на расположливи-те податоци во две множества: подато-ци за тренинг на невронската мрежа иподатоци за тестирање на невронскатамрежа;
- Да се поврзе базата на податоци со про-грамскиот модул ANFIS;
- Дизајнирање на фази-систем за донесу-вање заклучоци (FIS). Во овој чекор мо-же да се искористи веќе дизајниран фазисистем за донесување заклучоци или не-која од познатите методи за кластериза-ција како што се: методата на поделбана мрежа (grid partition) или методот наподкластери (subclustering method);
- Дизајнирање на бројот и формата (триа-голна, трапезоидна, ѕвончеста и сл.) на
А-89
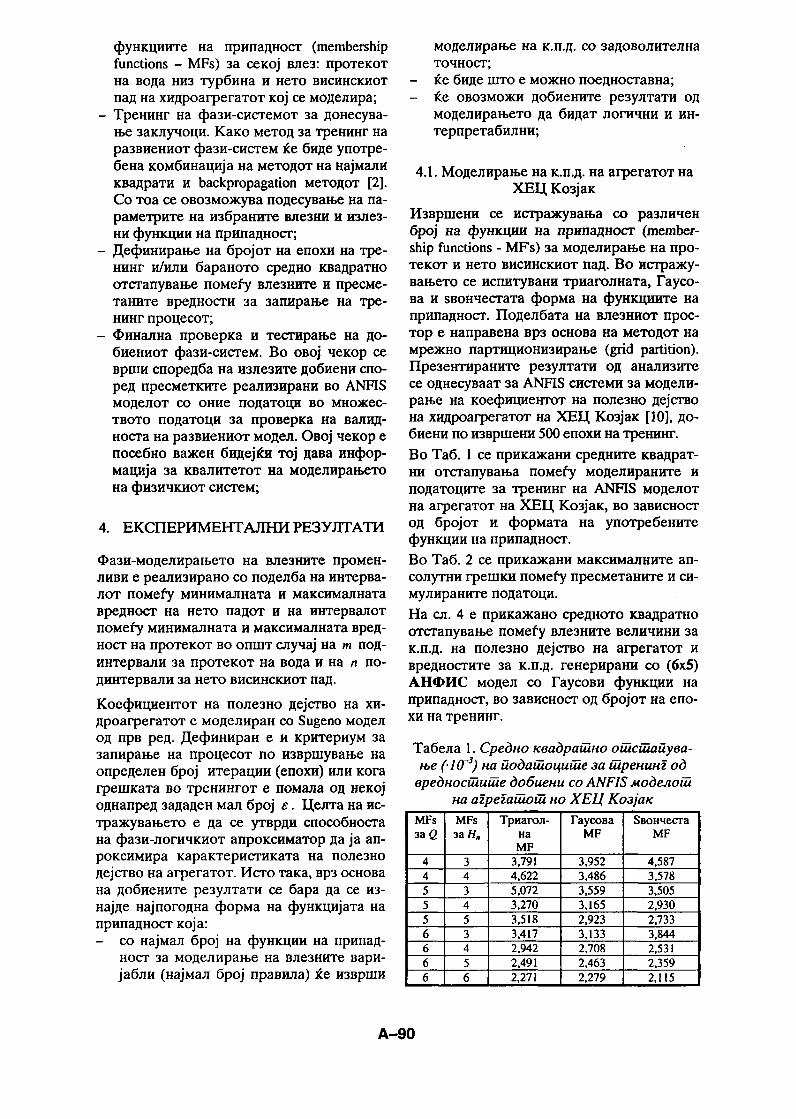
функциите на припадност (membershipfunctions - MFs) за секој влез: протекотна вода низ турбина и нето висинскиотпад на хидроагрегатот кој се моделира;
- Тренинг на фази-системот за донесува-ње заклучоци. Како метод за тренинг наразвиениот фази-систем ќе биде употре-бена комбинација на методот на најмаликвадрати и backpropagation методот [2].Co тоа се овозможува подесување на па-раметрите на избраните влезни и излез-ни функции на припадност;
- Дефинирање на бројот на епохи на тре-нинг и/или бараното средно квадратноотстапување помеѓу влезните и пресме-таните вредности за запирање на тре-нинг процесот;
- Финална проверка и тестирање на до-биениот фази-систем. Во овој чекор севрши споредба на излезите добиени спо-ред пресметките реализирани во ANFISмоделот со оние податоци во множес-твото податоци за проверка на валид-носта на развиениот модел. Овој чекор епосебно важен бидејќи тој дава инфор-мација за квалитетот на моделирањетона физичкиот систем;
4. ЕКСПЕРИМЕНТАЛНИРЕЗУЛТАТИ
Фази-моделирањето на влезните промен-ливи е реализирано со поделба на интерва-лот помеѓу минималната и максималнатавредност на нето падот и на интервалотпомеѓу минималната и максималната вред-ност на протекот во општ случај на т под-интервали за протекот на вода ина л по-динтервали за нето висинскиот пад.
Коефициентот на полезно дејство на хи-дроагрегатот е моделиран со Sugeno моделод прв ред. Дефиниран е и критериум зазапирање на процесот по извршување наопределен број итерации (епохи) или когагрешката во тренингот е помала од некојоднапред зададен мал број ѕ. Целта на ис-тражувањето е да се утврди способностана фази-логичкиот апроксиматор да ја ап-роксимира карактеристиката на полезнодејство на агрегатот. Исто така, врз основана добиените резултати се бара да се из-најде најпогодна форма на функцијата наприпадност која:- со најмал број на функции на припад-
ност за моделирање на влезните вари-јабли (најмал број правила) ќе изврши
моделирање на к.п.д. со задоволителнаточност;
- ќе биде што е можно поедноставна;- ќе овозможи добиените резултати од
моделирањето да бидат логични и ин-терпретабилни;
4.1. Моделирање на к.п.д. на агрегатот наХЕЦ Козјак
Извршени се истражувања со различенброј на функции на припадност (member-ship functions - MFs) за моделирање на про-текот и нето висинскиот пад. Во истражу-вањето се испитувани триаголната, Гаусо-ва и ѕвончестата форма на функциите наприпадност. Поделбата на влезниот прос-тор е направена врз основа на методот намрежно партиционизирање (grid partition).Презентираните резултати од анализитесе однесуваат за ANFIS системи за модели-рање на коефициентот на полезно дејствона хидроагрегатот на ХЕЦ Козјак [10], до-биени по извршени 500 епохи на тренинг.
Во Таб. 1 се прикажани средните квадрат-ни отстапувања помеѓу моделираните иподатоците за тренинг на ANFIS моделотна агрегатот на ХЕЦ Козјак, во зависностод бројот и формата на употребенитефункции на припадност.Во Таб. 2 се прикажани максималните ап-солутни грешки помеѓу пресметаните и си-мулираните податоци.
На сл. 4 е прикажано средното квадратноотстапување помеѓу влезните величини зак.п.д. на полезно дејство на агрегатот ивредностите за к.п.д. генерирани со (6x5)АНФИС модел со Гаусови функции наприпадност, во зависност од бројот на епо-хи на тренинг.
Табела 1. Средно квадратно отстапува-ње (10~3) на податоците за тренинг од
вредностите добиени со ANFIS моделотна агреѓатот но ХЕЦ Козјак
MFs
заб
445556666
MFsза//„
343453456
Триагол-наMF
3,7914,6225,0723,2703,5183,4172,9422,4912,271
ГаусоваMF
3,9523,4863,5593,1652,9233,1332,7082,4632,279
ЅвончестаMF
4.5873,5783,5052,9302,7333,8442,5312,3592,115
А-90
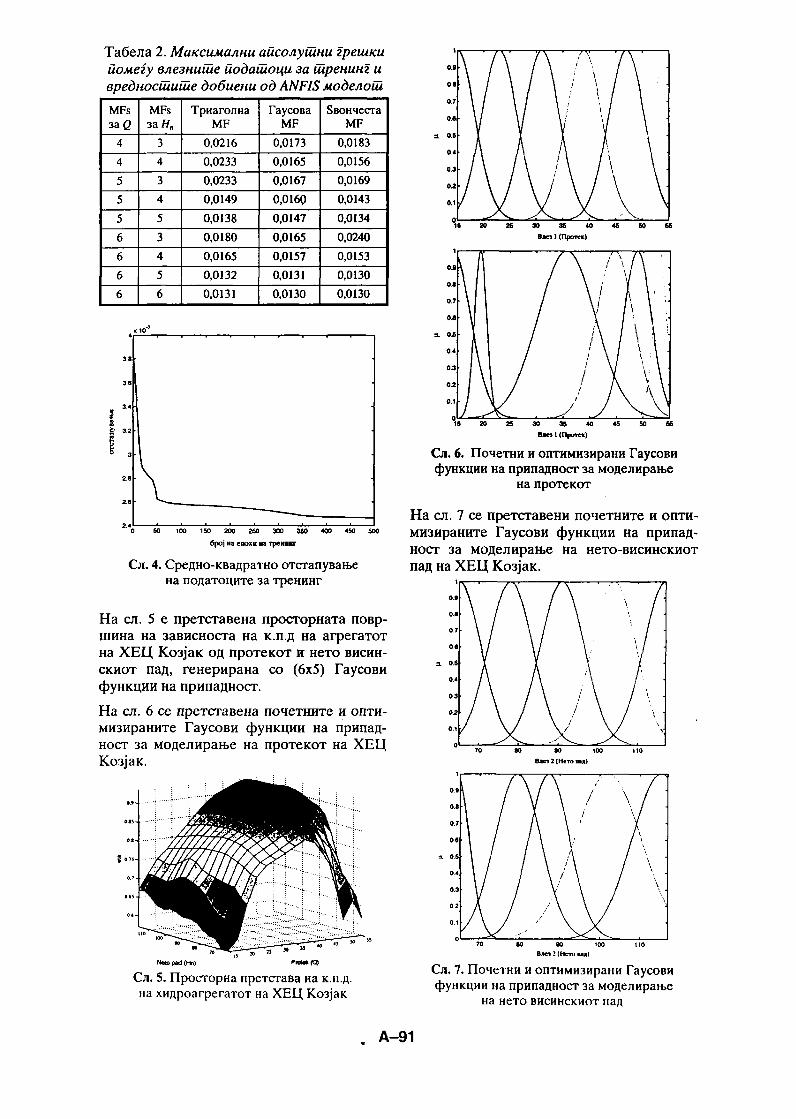
Табела 2. Максимални аисолушни грешкипомеѓу влезните податоци за тренинг ивредностите добиени од ANFIS моделот
MFsза£>
4
4
5
5
5
6
6
6
6
MFsза#„
3
4
3
4
5
3
4
5
6
ТриаголнаMF
0,0216
0,0233
0,0233
0,0149
0,0138
0,0180
0,0165
0,0132
0,0131
ГаусоваMF
0,0173
0,0165
0,0167
0,0160
0,0147
0,0165
0,0157
0,0131
0,0130
ЅвончестаMF
0,0183
0,0156
0,0169
0,0143
0,0134
0.0240
0,0153
0,0130
0,0130
60 100 150 200 260 300 360 400 450 6О0
број на епохи на треимкг
Сл. 4. Средно-квадратно отстапувањена податоците за тренинг
На сл. 5 е претставена просторната повр-шина на зависноста на к.п.д на агрегатотна ХЕЦ Козјак од протекот и нето висин-скиот пад, генерирана со (6x5) Гаусовифункции на припадност.
На сл. 6 се претставена почетните и опти-мизираните Гаусови функции на припад-ност за моделирање на протекот на ХЕЦКозјак.
Вле> 1 (Прота)
Сл. 6. Почетни и оптимизирани Гаусовифункции на припадност за моделирање
на протекот
На сл. 7 се претставени почетните и опти-мизираните Гаусови функции на припад-ност за моделирање на нето-висинскиотпад на ХЕЦ Козјак.
o.a
OS
0.7
0 «
a OS
0 4
0 3
0 2
0 1
0
TO SO 90 100BJlei 2 (H«1O m i l
\ /XV/ /\ v/ / V\
A / A V
\
/
no
Л .\\\
I
\\ •
ВлетЗ (Нсто шд)
Сл. 5. Просторна претстава на к.п.д.на хидроагрегатот на ХЕЦ Козјак
Сл. 7. Почетни и оптимизирани Гаусовифункции на припадност за моделирање
на нето висинскиот пад
А-91

Моделирање на к.п.д. на агрегатот на ХЕЦКозјак е извршено и со три класични ре-гресиони полиномни модели:
Модел Ml:
Модел М2:
+ gQ3 + hHl + iQ2Hn + jQH7
n
Модел МЗ:
+ еН2 + fQHn (4)
(5)
+ kQ2
l +iQ2Hn +JQH2
l + mQ3Hn + pQ2H2 (6)
Коефициентите на полиномите за овиетри модели T}ai(Q,Hn), / = 1,2,3 ; се пресмета-ни според класичната метода на најмаликвадрати.
Потоа, пресметани се средната квадратнагрешка помеѓу влезните податоци за тре-нинг за к.п.д. на агрегатот на ХЕЦ Козјаки вредности добиени според моделитеШ,М2 и МЗ, како и максималните апсолутнигрешки што при тоа се појавуваат. Резул-татите од аналзите се прикажани во Таб.З.
Табела 3. Средно-квадратна и максимал-на апсолутна Грешка помеѓу влезнитеи моделираните Големини
Средно-квадратнагрешкаМаксимална апсо-лутна грешка
Ml
0,0213
0,0783
М2
0.0126
0,0516
мз0,0114
0,0546
Co споредба на добиените резултати (Таб.1; Таб. 2 и Таб. 3) се заклучува дека разви-ените неуро-фази модели за агрегатот наХЕЦ Козјак имаат подобри карактерис-тики (помала средно-квадратна грешка ипомала максимална апсолутна грешка) воспоредба со класичните полиномни моде-лиМ1,М2иМЗ.
5. ЗАКЛУЧОК
Развиен е оригинален неуро-фази метод замоделирањето на коефициентот на полезо
дејство на хидроагрегатот. Извршенитеистражувања покажаа дека моделирањетона влезните променливи со 4-6 функции наприпадност дава солидни резултати, имај-ќи ги предвид меѓусебно спротивставенитебарања за што попрецизно моделирање иза употреба на што е можно помал број напотребни правила за опишување на фази-системот за донесување заклучоци. Спо-редбата на развиениот неуро-фази логич-ки пристап со класичните полиномни мо-дели покажува дека предложениот кон-цепт овозможува поточна и подоверливаапроксимација на коефициентот на полез-но дејство на агрегатот во функција одпротекот и нето-висинскиот пад.
6. ЛИТЕРАТУРА
[1] В. Коѕко, Fuzzy systems as universal functionapproximators, IEEE International Conferencein Neural Network and Fuzzy Systems, 1992,1153-1162.Jyh Shing Roger Jang: ANFIS: Adaptive-Net-work Fuzzy Inference System. IEEE TransactionSystem, Man Cybernetic, 23 (1993), p.p. 665-685.A. M. Iliev, V. V. Fustik: ANFIS Based Methodfor Hydro Unit Efficiency Calculation, IASTEDConference of PES, Crete, 25-28 June 2002, pp.450-455.D. Tikk, G. Biro, T.D. Gedeon, L. Kocszy: Im-provements and Critique on Sugeno's and Yasu-kawa's Qualitative Modeling, IEEE Transactionon Fuzzy Systems, Vol.10, No.5, October 2002,p.p. 596-606.E. Kim, Minkee Park, S. Ji, Mignon Park: ANew Approach to Fuzzy Modelling: IEEE Tran-saction on Fuzzy System, Vol.5, No.3 August1997, pp.328-337.W. Pedryez, M. Reformat: Ruled based Mode-ling of Nonlinear Relation, IEEE Transaction onFuzzy System, Vol.5, No.2 May 1997, pp.256-269.Jyn-Shing Jang, Chuen-Tsai Chen, Neuro-FuzzyModeling and Control, Proceedings of the IEEE,Vol. 83, No.3, March 1995, p.p. 378-406.MATLAB User's Guide, The Math Works, Inc.,2000.Fuzzy Logic Toolbox for Use with MATLAB,The Math Works, Inc. 2000.
[10] ЈП Електростопанство на Македонија:ХЕЦ Козјак во изградба - проектна доку-ментација - универзална карактеристиканатурбина, 1999.
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
А-92

Summary
NEURO-FUZZY MODELLING OF HYDRO UNIT EFFICIENCY
Atanas Iliev, Vangel Fustik
Faculty of Electrical Engineering - Skopje, Karpos II, b.b. P.O.Box 574, 1000 Skopje,[email protected]; [email protected]
Key words - fuzzy systems, neural network, modeling, hydro unit, efficiency
This paper presents neuro-fuzzy method for mode- Developed method is practically applied for mode-ling of the hydro unit efficiency. The proposed met- ling of the efficiency of unit which will be installedhod uses the characteristics of the fuzzy systems as in the hydro power plant Kozjak. Comparison of theuniversal function approximators, as well the abilities performance of the derived neuro-fuzzy method withof the neural networks to adopt the parameters of the several classical polynomials models is also perfor-membership's functions and rules in the consequent med.part of the developed fuzzy system.
A-93

INVESTIGATION OF THE INFLUENCE OF INTEGRATEDDISPERSED ENERGY RESOURCES AND NON-LINEAR
LOADS ON THE DIGITAL PROTECTION
B. Hadzi-Kostova, Z. Styczynski
MK0600059
Abstract— This paper presents the results of the investigationconcerning the behavior of digital protection devicesimplemented in a power system that contains dispresed energyresources such as wind power plants, fuel cells and photovoltaics;and non-linear loads. The study combines basic knowledge fromthe fields of power quality and protection technique. The goal isto test and analyse the impact of the new electrical environmenton the different types of protection algorithms that can beimplemented in the protection devices. A comparation of thedifferent protection algorithms concerning their output results ispresented.
Index Terms — Electrical Power System, Fault, HarmonicsProtection Relays, Relaying Algorithms.
1. INTRODUCTION
I HE fast development of dispersed energy resources andtheir implementation in the electrical energy system
(EES), in combination with the rapidly rising number ofelecrical energy users with non-linear U-l characteristic setsnew demands for the network protection systems. Theresearch of the behavior of the protective relays in the newelectrical environment joins knowledge, not only from thefield of protection technique, but also from other differentengineering disciplines like: power quality, power systemcontrols, signal processing and computing, system stateestimation, intelligent systems, etc. Generated disturbances inthe voltage and the current, that appear not due to a fault in theprotected relay zone, but from the new power systemenvironment may lead the protection relay to send an incorrecttripping command to the circuit breaker. This phenomenonhas consequences on the threshold setting of the protectionrelays and their testing [1-5].
In the work presented in this paper, for the construction of thenew protective relay elements and the models for dispersedenergy resources and non-linear power loads the standarduniversity tool of MATLAB-SIMULINK with SimPowerSystem-Block Set is used.
B. Hadzi-Kostova is a research Assistant of the Chair for Electrical PowerNetwork and Renewable Energy Sources at ihe Otlo-von-Guericke UniversityMagdeburg, Faculty of Electrical Engineering and Information Technology (e-mail: biljiiiia.liail/i-koslovutii'iMcclinik uni-niagdcbur(!.ili;).
Z. Styczynski is a Head of the Chair for Electrical Power Network andRenewable Energy Sources at Ihe Otto-von-Guericke University Magdeburg,Faculty of Electrical Engineering and Information Technology (email: s iy te -lixhnik.uni-iiiajidchuru do)
Models of the four types of distance protection algorithms forcalculation of the distance to the fault (steady-state; steady-state-phasor; line differential equation first and second orderapproach) are made. The different algorithms are tested in anelectrical environment with dispersed energy resources (testnetwork). Models for differential protection are constructedand tested as well. The problems of the current transformersaturation are also taken into consideration.
The paper starts with the description of the modeled protectiverelays. Implementation of the four types of distancealgorithms, as well as of the differential protection follows.The aim of this paper is to present the behavior of theprotection algorithms in the new decentralised environmentconcerning primarily the power quality. The results of theinvestigations are presented in a few examples. Conclusionsare given at the end of the paper.
2. MODELING OF DISTANCE PROTECTION DEVICES
For the modeling of protective distance relays, so as for thedifferential relays, the hardware and software elements of thedigital relay are represented with corresponding blocks andtheir number was set to minimum with the demand ofmaximum flexibl ility of the model and maximumcorrespondness to the modeled digital protection relay [1-3].Implemented basic hardware and software components of adigital relay in the MATLAB - library are : ports for dataacquisition, digital filters, the four types of distancealgorithms, different tripping characteristics and algorithmsfor the differential protection. Libraries are made also for:different current and voltage transformer models, non-linearloads and the decentralised power sources. This enables one tofreely design digital relays and network elements by selectingand joining elements from the libraries.
This also provides a very good opportunity for the user toleam the different digital relay constructions and investigatetheir behavior in the different conditions as well as in differentconfigurations of the power system.
A - 9 4

2.1 Implementation of steady-stale algorithms
For calculation of the distance to the fault on the protectedpower transmission line, this group of algorithms uses thesteady-state equations o f the input signals treating them assolid sinusoidal voltages and currents. With a small samplingrate (8-12 per period) of the voltages and the currents, theresistance R (Ohm) and the reactance X (Ohm) can becalculated. Having the values of the line parameters, thedistance to the fault can easily be calculated. The algorithmsof: Gilbert/Shovlin, Mann/Morrison, Gilcrest/Rockefeller andthe T2- Method from Lobos belong to this group [1]. Thebehavior o f all of these algorithms is investigated.
The input signals of the relay terminals are due to the non-linearities of the integrated power electronics in the systemelements, not ideal. For the testing of the behavior of theprotection relays a simple test-network presented on Fig. 1 isused. For this example, the wind power generator is connectedto the EES through a 6-pulse inverter and the non-linear loadis connencted to the EES through a 12-pulse inverter.
In the invesigations no fault on the transmission line, butinjection of harmonics according ( I ) are taken into account.
v = 1,2,3....w(1)
where p = 6, the generated harmonics and their maximumallowed amounts are given in Table 1.
From (1) can be calculated that the injected harmonics from a12-pulse inverter are from the I I , 13, 23, 25... order.Concerning Table 1 a 12-pulse inverter injects a lower amountof harmonics into the EES.
CT - Current Transformer
VT - Vollage Transformer
CB Circuil breaker
У- t-aull
( j Summalinn Generalor
Fig. I Test-network for protection algorithms
In order to investigate the behavior of every algorithm by non-ideal input signals the first tests of the algorithms are made forone phase. As an non-ideal input signals on the relay terminalsthe maximum values given in Table I are used. The standardoutput values of voltage transformer 100V and currenttransformer 1A are taken, and the angle <p = -pi/6. No loadwas taken into consideration. The results for the resistance R= 83 Q , and for the reactance X = 52 Q are to be expected.
As an example the response of the steady-state algorithmGilbert/Shovlin is given of this on Fig. 2.
Table I:
Maximum allowed amount of harmonics by a 6 - pulseinverter.
Harmonicsorder
57I I
13171923252931
Harmonic current/Nominal current
0,2025
0,1025
0,08
0,06
0,05
0,05
0,03
0,035
0,025
0,03
•! I
Fig. 2 Response of the algorithm of Gilbert/Shovlin
It can be seen, that the algorithms from this group areextremly sensitive to harmonic influence. The estimation ofthe reactance and the resistance of the power transmission lineis not stable and with that the command for relay - tripping isincorrect. The reasons for this lay in the small number ofsampling data and the small data window.In Table 2 the results of this group of distance calculationalgorithms are given.
Table 2:Characteristics of the steady-state algorithms
Input signals
SinusoidalHarmonicsSamling rateData window (ms)
Gilber/Shovli.++-
87.5
T2-Lobos++-
85
Mann/Morris+-
123.33
Gilbert/Rockef.+-
125
Symbol meanings: (++) unsensitive, (+) relatively unsensitive,(--) very sensitive, systematic follows [ I ]
These algorithms should not be used for calculation of thefault distance when signal disturbances caused by dispersedenergy resources and non-linear loads are present in thenetwork.
A - 9 5
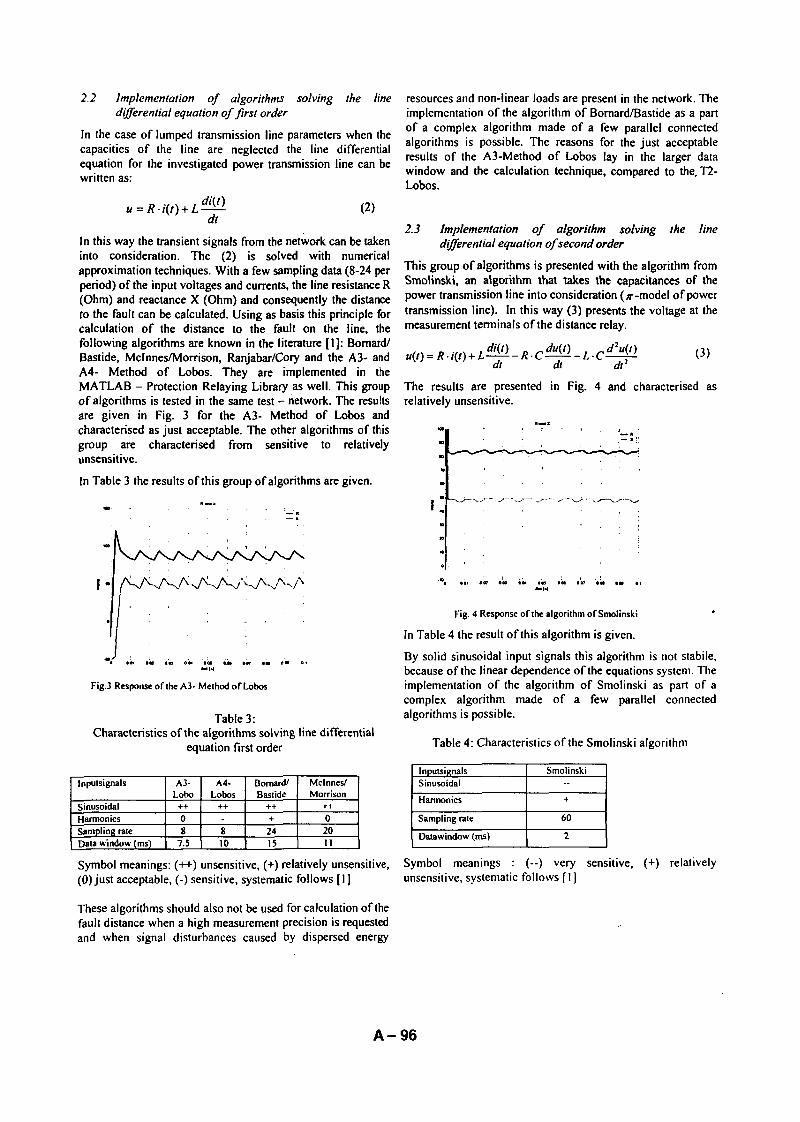
2.2 Implementation of algorithms solving the linedifferential equation of first order
In the case of lumped transmission line parameters when thecapacities of the line are neglected the line differentialequation for the investigated power transmission line can bewritten as:
u = Ri(t) + Ldi(t)
dt(2)
In this way the transient signals from the network can be takeninto consideration. The (2) is solved with numericalapproximation techniques. With a few sampling data (8-24 perperiod) of the input voltages and currents, the line resistance R(Ohm) and reactance X (Ohm) and consequently the distanceto the fault can be calculated. Using as basis this principle forcalculation of the distance to the fault on the line, thefollowing algorithms are known in the literature [1]: Bornard/Bastide, Mclnnes/Morrison, Ranjabar/Cory and the A3- andA4- Method of Lobos. They are implemented in theMATLAB - Protection Relaying Library as well. This groupof algorithms is tested in the same test - network. The resultsare given in Fig. 3 for the A3- Method of Lobos andcharacterised as just acceptable. The other algorithms of thisgroup are characterised from sensitive to relativelyunsensitive.
In Table 3 the results of this group of algorithms are given.
• «1 • • I n OOa в« I N IIT I B C"
Fig.3 Response of ihe A3- Method of Lobos
Table 3:Characteristics of the algorithms solving line differential
equation first order
Inputsignals
Sinusoidal
Harmonics
Sampling rate
Data window (ms)
A3-
Lobo++
08
7.5
A4-
Lobos++
.
8
10
Bornard/
Bastide++
+
24
15
Mclnnes/
Morrison++
0
20
11
Symbol meanings: (++) unsensitive, (+) relatively unsensitive,(O)just acceptable, (-) sensitive, systematic follows [I]
These algorithms should also not be used for calculation of thefault distance when a high measurement precision is requestedand when signal disturbances caused by dispersed energy
resources and non-linear loads are present in the network. Theimplementation of the algorithm of Bornard/Bastide as a partof a complex algorithm made of a few parallel connectedalgorithms is possible. The reasons for the just acceptableresults of the A3-Method of Lobos lay in the larger datawindow and the calculation technique, compared to the. T2-Lobos.
2.3 Implementation of algorithm solving the linedifferential equation of second order
This group of algorithms is presented with the algorithm fromSmolinski, an algorithm that takes the capacitances of thepower transmission line into consideration (л--model of powertransmission line). In this way (3) presents the voltage at themeasurement terminals of the distance relay.
du{t)— (3)
The results are presented in Fig. 4 and characterised asrelatively unsensitive.
I.
Fig. 4 Response of the algorithm of Smolinski '
In Table 4 the result of this algorithm is given.
By solid sinusoidal input signals this algorithm is not stabile,because of the linear dependence of the equations system. Theimplementation of the algorithm of Smolinski as part of acomplex algorithm made of a few parallel connectedalgorithms is possible.
Table 4: Characteristics of the Smolinski algorithm
Inputsignals
Sinusoidal
Harmonics
Sampling rale
Dalawindow (ms)
Smolinski
--
+
60
2
Symbol meanings : (--) very sensitive, (+) relativelyunsensitive, systematic follows [I]
A - 9 6

2.4 Implementation of Filter - Algorithms
The steady-state approach can be improved with theimplementation of one of the following methods: Fourier-filtering [6], discrete cross-correlation, orthogonal expansions,symmetrical filtering or Kalman filtering [I].
Using the above mentioned improving, filtering methods, thefollowing algorithms are programed and tested in thepresented test-network: Phadke/lbrahim, Slemon/Robertson,Sachdev/Baribeau, Carr/Jackson, Kratz and Girgis.
The results of this group of algorithms are presented on Fig. 5by the example of the algorithm of Phadke/lbrahim. Thisalgorithm calculates the orthogonal components of the inputsignals voltage (4 ) and (5):
Im{t/} = - £
(4)
(5)
Fig. S Response of the algorithm of Phadke/lbrahim
The results of all implemented filtering-algorithms are givenin Table 5. It can be noticed that they are practically the same- unsensitive to harmonics. The differences concern themethod of calculation, realisation of the filter, the samplingrate and the data window.
and current (6) and (7):
(6)
(7)
where n is the number of sampling data for one period.
Using the orthogonal components of the voltages and thecurrents the resistance R (Ohm) and the reactance X (Ohm) ofthe power transmission line can be calculated using thefollowing (8) and (9):
(8)
(9)
It can be noticed that the resistance R (Ohm) and the reactanceX (Ohm) of the power transmission line are correctlycalculated in a time duration of 0.02 s.
That is precisely the duration of one data window.
The results of this group of algorithms, thanks primarly to thefiltering of the relay input signals and secondary to the highnumber of sampling data are characterised as unsensitive toharmonics.
Table 5:Characteristics of the filtering-algorithms
Inputsignals
Sinusoidal
Harmonics
Sampling rateDatawindow (ms)
Phadke/Ibrahim
++
++
20
20
Slemon/Robert
++++
20
20
Can/Jack++
++
16
25
Sachdev/Baribeau
++
++
12
15
Symbol meanings: (++) unsensitive, systematic follows [ I ]
If the calculated line parameters find themselves in thetripping area of the programed relay characteristic the relaywill send a tripping command to the circuit breaker. Anexample of an implemented tripping characteristic as a blockdiagram is given in Fig. 6.
1
<<<<
V.luei R ind X |
ч Rfnl>-R, y
• >»ч X(n)>-o.Rlnl S
•»-^ XlnXI X.-o-R(nl
R(nl< R. y — H
'—Г—,*-| >e 1 •
1 m,1
P '
<
I • <
Tnpping Command
C XlnXIX.-o.Rlnl ^ >
/ S.t R(ni < Ri >
Fig. 6 Implemented tripping characteristic [2]
The tripping characteristic is in a polygon shape and dividedinto two tripping zones (R|,X, and Ri,X2)- That protects thepower transmission line in forward direction. As an examplethe results of a phase to phase fault on 10 km of the protected
A - 9 7

20 km long power transmission line at time point 0.2 s (PhaseA to ground solid fault) are given in Fig. 7.
• «si to» •« I M •« «a
«i» •)Fig. 8 Low - Saturation characteristic
Fig. 7 Response of the algorithm of Phadke/lbrahim in the case ofphase to ground fault
The tripping command is given after 0.008 s and the distanceto the fault is correctly measured at the first tripping zone ofthe line.
These algorithms can be used for calculation of the faultdistance when a high measurement precision is requested. Theimplementation of the algorithms as a part of a complexalgorithm made of a few parallel connected algorithms is alsopossible.
\ A \ /f
3. M O D E L I N G OF DIFFERENTIAL PROTECTION DEVICES
The same power transmission line is also protected with a linedifferential protection. As input signals to the protection relaythe voltages and the currents of the both sides of thetransmission line are used. The realised algorithm functionsunder the well known current difference method. In case of afault in the protected zone, the protection relay should send atripping command to the circuit breaker and in the case of afault outside the protected zone that should not be the case.
Especially in systems with high short circuit power and a faultclose to the relays but outside the protected zone the effect ofcurrent transformer saturation becomes important. This effectrepresents the difference in the shape between the input andthe output current of the current transformer. The bigger thedifference, the smaller the measurement precision of thecurrent transformers, and with that the bigger themeasurement error and the possibility of a false trippingcommand. For this purpose models of different currenttransformers considering the parameter time - to - saturate areprogrammed and tested.
In Fig. 8 and Fig. 9 two examples as a result of differentferomagnetic - material characteristics and with differentmagnetisation curves and saturation effects are presented.
Fig. 9 High - Saturation characteristic
Comparing the two given characteristics (Fig. 8 and Fig. 9 )the importance of this event should be clear.
The results from the fault in the protected zone at a time of 0.3s made on a differential protection relay with (tripping timeafter 0.05 s of the fault accuration) are shown in Fig. 10.
Fig. 10 Tripping characteristic of ihe relay with an integrated fillerfor the input signals
A - 9 8
Шесша национална конференција со меѓународно учесшво ЕТАИ'2003Sixth National Conference With International Participation ЕТАГ2003
Охрид, Република МАКЕДОНИЈА - Ohrid, Republic of MACEDONIA17-20. IX 2003
мкобоообо
БЕЗКОНТАКТЕН МОНИТОРИНГHA КАТОДНА ЗАШТИТА
Зоран Ангеловски1, Јулие Цинклер2, Драган Станковски3
'FZC 11 OKTOMVRI - Kumanovo, ul: 11 Noemvri br. 86, [email protected] ZA PREVENTIVU - Novi Sad, ul: Kraqevija Marka br. 11, SCG,[email protected]
3Електротехнички факултет, Карпош II, бб, 1000 Скопје, [email protected]
Извадок: Катодната заштита е многу еконо-мичен и ефикасен начин на заштита на под-земните структури од електролитичка корози-ја. Оваа заштита се одржува кога потенција-лот помеѓу површината на структурата и еле-ктролитот на околината го задржуваат мате-ријалот во имуна состојба од корозија. Овазначи дека потенцијалот на секоја точка назаштитената структура треба да се проверуваи одржува. Проверката на потенцијалот можеда биде на неколку начини. Класичниот начин,мерење на потенцијалот на цевоводот на тестточки на 1-2км, врши само "потенцијален при-мерок" при што може да се добие состојбатасамо во ^ерните точки, додека може да имаранливи н дефектни точки помеѓу овие точки.Таканаречени "ннтензивни мерења", се когасе мери потенцијалот вдолж цевководот содвижечка електрода, поврзана на тест точка-та. Проверувајки го магнетното поле на по-вратната струја вдолж цевководот, може да сенајдат истите аномалии.
Овие мерења може да се направат ако еднолице шета вдолж трасата на цевководот. Аковдолж трасата на цевководот нема пречки, мо-же да се употреби возило кое се движи вдолжтрасата. Co користење на компјутерски бази-ран уред за снимање во возилото, мереннтевредности може да се комбинираат со локаци-ја на аномалијата и снимката може директнода го покаже местото на дефектот. Поната-мошно подобрување и убрзување на работатаможе да се добие со употреба на хелихоптер.Трудов ја претставува постоечката состојбана оваа поле и опремата и методите кои се ко-ристат во АД "11 Октомври" од Куманово.
Клучни зборови -катодна заштита, челичен це-вковод, безконтактен мониторинг, корозија
ВОВЕД
За снабдување на големи индустриски потро-шувачи и урбани средини со енергетски флуи-ди и вода се јавува потреба од транспорт на го-леми количини на флуиди од нивните извори.Co оглед на добри механички особини и нискацена на челик, денеска се смета дека најбезбе-ден транспорт на овие флуиди е со челичницевководи поставени во земја, под реки, езераи мориња. За таа цел изградени се цевководисо должини преку илјада километри и дијаме-тар до 2 т .
Своите особини челикот ги добива со хемискипроцеси при негово производство од железнаруда со вложување на голема количина наенергија од надвор, за да се добие кристалнаструктура во која атомите на железо имаатпоголемо енергетско ниво одошто при јонскиоблик во руда. Тенденција на сите чисти мета-ли па и на железото е да помиинат во понискоенергетско ниво кога ќе се појават такви усло-ви во околната средина.
Челичните цевководи се долги метални стру-ктури кои со својата траса поминуваат во поч-ви со различен хемиски состав, степен навлажност, кислородна аерираност, рН фактор,специфичен електричен отпор и сл. Влијание-то на средината во која се положени цевково-ди се манифестира во различни вредности наприродниот потенцијал на цевковод во поо-делни делници односно формирање на коро-зивни ќелии во кои протечуваат лутачкиструи од локалните аноди преку почвен еле-ктролит до локалните катоди на самиот це-вковод. Овие струи имаат електрохемискаприрода и вршат однесување на материјал одцевководот во анодните зони.
За да се спречи перфорирање на цевководитево анодни зони, денес е усвоена пракса да це-
A - 1 4 7
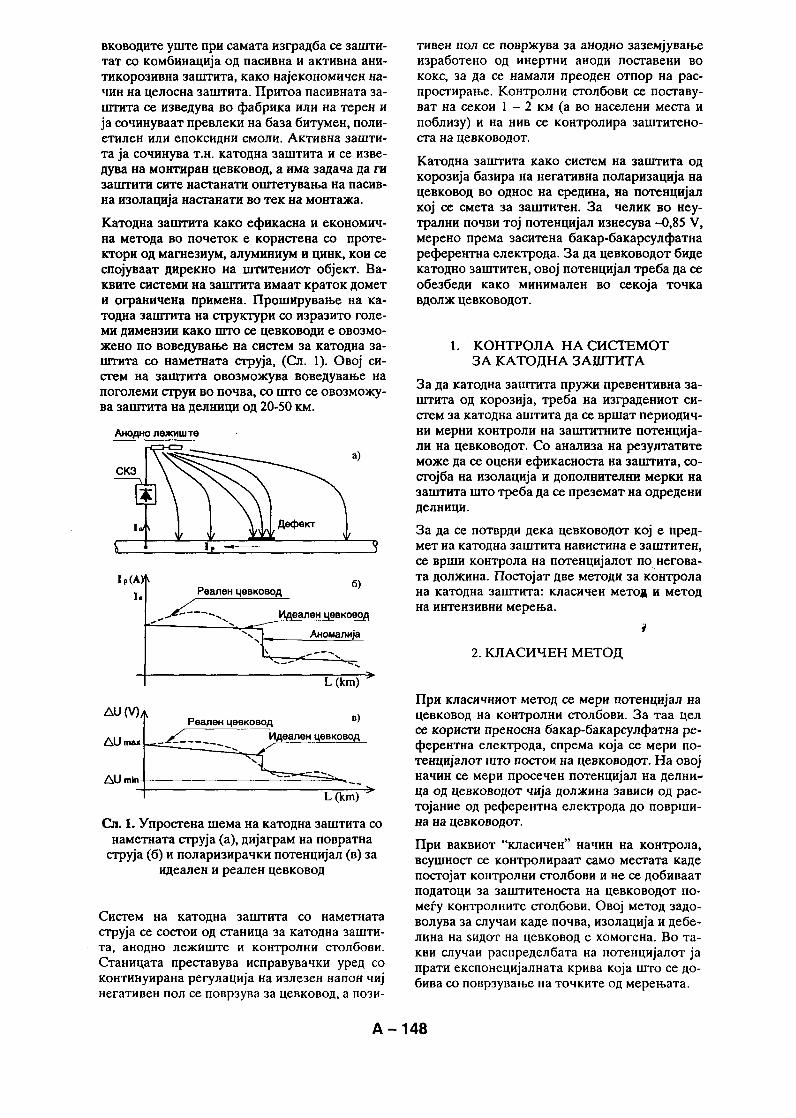
вководите уште при самата изградба се зашти-тат со комбинација од пасивна и активна ани-тикорозивна заштита, како најекономичен на-чин на целосна заштита. Притоа пасивната за-штита се изведува во фабрика или на терен ија сочинуваат превлеки на база битумен, поли-етилен или епоксидни смоли. Активна зашти-та ја сочинува т.н. катодна заштита и се изве-дува на монтиран цевковод, а има задача да гизаштити сите настанати оштетувања на пасив-на изолација настанати во тек на монтажа.
Катодна заштита како ефикасна и економич-на метода во почеток е користена со проте-ктори од магнезиум, алуминиум и цинк, кои сеспојуваат дирекно на штитениот објект. Ва-квите системи на заштита имаат краток домети ограничена примена. Проширување на ка-тодна заштита на структури со изразито голе-ми димензии како што се цевководи е овозмо-жено по воведување на систем за катодна за-штита со наметната струја, (Сл. 1). Овој си-стем на заштита овозможува воведување напоголеми струи во почва, со што се овозможу-ва заштита на делници од 20-50 км.
Анодно лежиште
б)Реален цевковод
— — ^ ^ Идеален цевковод
Аномалија
L ( k m )
Реален цевковод в^Идеален цевковод
L(km)
Сл. I. Упростена шема на катодна заштита сонаметната струја (а), дијаграм на повратна
струја (б) и поларизирачки потенцијал (в) заидеален и реален цевковод
Систем на катодна заштита со наметнатаструја се состои од станица за катодна зашти-та, анодно лежиште и контролни столбови.Станицата преставува исправувачки уред соконтинуирана регулација на излезен напон чијнегативен пол се поврзува за цевковод, а пози-
тивен пол се повржува за анодно заземјувањеизработено од инертни аноди поставени вококс, за да се намали преоден отпор на рас-простирање. Контролни столбови се поставу-ват на секои 1 - 2 км (а во населени места ипоблизу) и на нив се контролира заштитено-ста на цевководот.
Катодна заштита како систем на заштита одкорозија базира на негативна поларизација нацевковод во однос на средина, на потенцијалкој се смета за заштитен. За челик во неу-трални почви тој потенцијал изнесува -0,85 V,мерено према заситена бакар-бакарсулфатнареферентна електрода. За да цевководот бидекатодно заштитен, овој потенцијал треба да сеобезбеди како минимален во секоја точкавдолж цевководот.
1. КОНТРОЛА НАСИСТЕМОТЗА КАТОДНА ЗАШТИТА
За да катодна заштита пружи превентивна за-штита од корозија, треба на изградениот си-стем за катодна аштита да се вршат периодич-ни мерни контроли на заштитните потенција-ли на цевководот. Co анализа на резултатитеможе да се оцени ефикасноста на заштита, со-стојба на изолација и дополнителни мерки назаштита што треба да се преземат на одредениделници.
За да се потврди дека цевководот кој е пред-мет на катодна заштита навистина е заштитен,се врши контрола на потенцијалот по негова-та должина. Постојат две методи за контролана катодна заштита: класичен метоа и мстодна интензивни мерења.
1
2. КЛАСИЧЕН МЕТОД
При класичниот метод се мери потенцијал нацевковод на контролни столбови. За таа целсе користи преносна бакар-бакарсулфатна ре-ферентна електрода, спрема која се мери по-тенцијалот што постои на цевководот. На овојначин се мери просечен потенцијал на делни*ца од цевководот чија должина зависи од рас-тојание од референтна електрода до површи-на на цевководот.
При ваквиот "класичен" начин на контрола,всушност се контролираат само местата кадепостојат контролни столбови и не се добиваатподатоци за заштитеноста на цевководот по-меѓу контролните столбови. Овој метод задо-волува за случаи каде почва, изолација и дебе-лина на ѕидот на цевковод е хомогена. Во та-кви случаи распределбата на потенцијалот јапрати експонецијалната крива која што се до-бива со поврзување на точките од мерењата.
A - 1 4 8
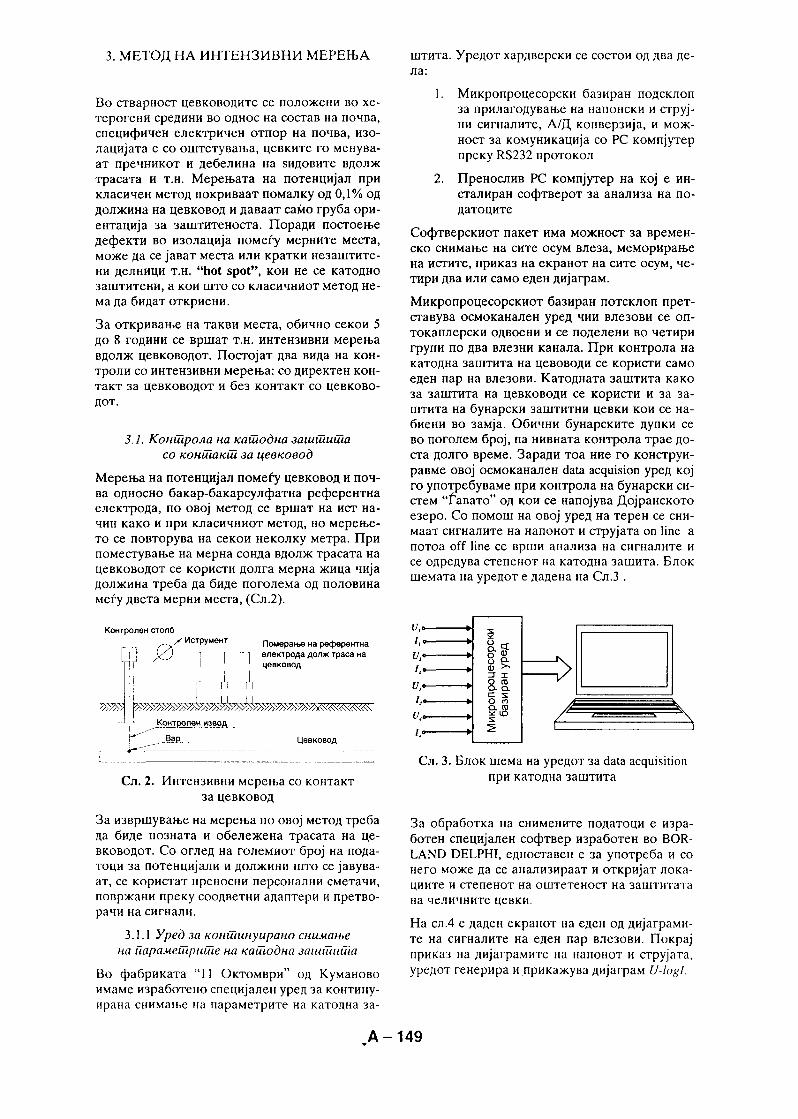
3. МЕТОД НА ИНТЕНЗИВНИ МЕРЕЊА
Bo стварност цевководите се положени во хе-терогени средини во однос на состав на почва,специфичен електричен отпор на почва, изо-лацијата е со оштетувања, цевките го менува-ат пречникот и дебелина на ѕидовите вдолжтрасата и т.н. Мерењата на потенцијал прикласичен метод покриваат помалку од 0,1% оддолжина на цевковод и даваат само груба ори-ентација за заштитеноста. Поради постоењедефекти во изолација помеѓу мерните места,може да се јават места или кратки незаштите-ни делници т.н. "hot spot", кои не се катоднозаштитени, а кои што со класичниот метод He-Ma да бидат откриени.
За откривање на такви места, обично секои 5до 8 години се вршат т.н. интензивни мерењавдолж цевководот. Постојат два вида на кон-троли со интензивни мерења: со директен кон-такт за цевководот и без контакт со цевково-дот.
3.1. Контрола на катодна заштитасо контакт за цевковод
Мерења на потенцијал помеѓу цевковод и поч-ва односно бакар-бакарсулфатна референтнаелектрода, по овој метод се вршат на ист на-чин како и при класичниот метод, но мерење-то се повторува на секои неколку метра. Припоместување на мерна сонда вдолж трасата нацевководот се користи долга мерна жица чијадолжина треба да биде поголема од половинамеѓу двета мерни места, (Сл.2).
Контролен столбИ с т
Р Ум в н т
Померање на референтнаелектрода долж траса нацевковод
Сл. 2. Интензивни мерења со контактза цевковод
За извршување на мерења по овој метод требада биде позната и обележена трасата на це-вководот. Co оглед на големиот број на пода-тоци за потенцијали и должини што се јавува-ат, се користат преносни персонални сметачи,повржани преку соодветни адаптери и претво-рачи на сигнали.
3.1.1 Уред за континуирано снимањена параметрите на катодна заштита
Во фабриката "11 Октомври" од Кумановоимаме изработено специјален уред за контину-ирана снимање на параметрите на катодна за-
штита. Уредот хардверски се состои од два де-ла:
1. Микропроцесорски базиран подсклопза прилагодување на напонски и струј-ни сигналите, А/Д конверзија, и мож-ност за комуникација со PC компјутерпреку RS232 протокол
2. Пренослив PC компјутер на кој е ин-сталиран софтверот за анализа на по-датоците
Софтверскиот пакет има можност за времен-ско снимање на сите осум влеза, меморирањена истите, приказ на екранот на сите осум, че-тири два или само еден дијаграм.
Микропроцесорскиот базиран потсклоп прет-ставува осмоканален уред чии влезови се оп-токаплерски одвоени и се поделени во четиригрупи по два влезни канала. При контрола накатодна заштита на цевоводи се користи самоеден пар на влезови. Катодната заштита какоза заштита на цевководи се користи и за за-штита на бунарски заштитни цевки кои се на-биени во замја. Обични бунарските дупки сево поголем број, па нивната контрола трае до-ста долго време. Заради тоа ние го конструи-равме овој осмоканален data acquision уред којго употребуваме при контрола на бунарски си-стем "Ѓавато" од кои се напојува Дојранскотоезеро. Co помош на овој уред на терен се сни-маат сигналите на напонот и струјата on line aпотоа off line ce врши анализа на сигналите исе одредува степенот на катодна зашита. Блокшемата на уредот е дадена на Сл.З .
Сл. 3. Блок шема на уредот за data acquisitionпри катодна заштита
За обработка на снимените податоци е изра-ботен специјален софтвер изработен во BOR-LAND DELPHI, едноставен е за употреба и сонего може да се анализираат и откријат лока-циите и степенот на оштетеност на заштитатана челичните цевки.
На сл.4 е даден екранот на еден од дијаграми-те на сигналите на еден пар влезови. Покрајприказ на дијаграмите на напонот и струјата,уредот генерира и прикажува дијаграм U-logl.
A - 1 4 9
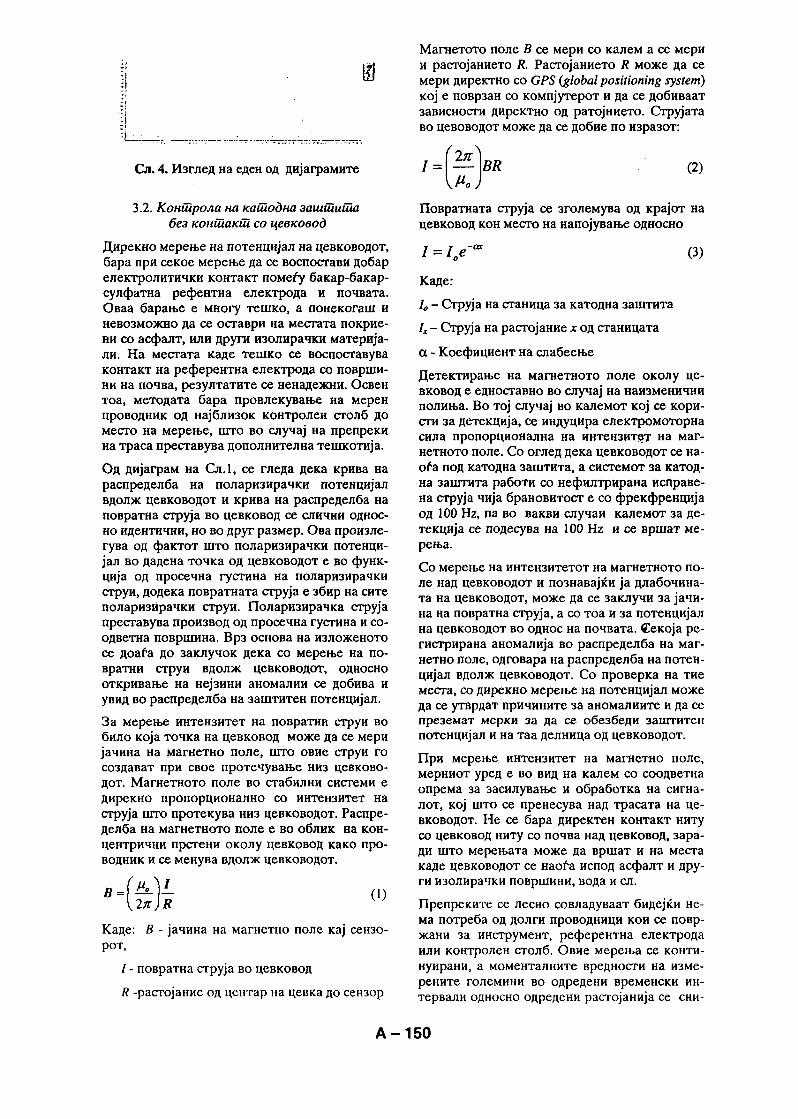
Сл. 4. Изглед на еден од дијаграмите
Магнетото поле В се мери со калем a ce мерии растојанието R. Растојанието R може да семери директно со GPS (global positioning system)кој е поврзан со компјутерот и да се добиваатзависности директно од ратојнието. Струјатаво цевоводот може да се добие по изразот:
(2)
3.2. Контрола на катодна заштитабез контакт со цевковод
Дирекно мерење на потенцијал на цевководот,бара при секое мерење да се воспостави добарелектролитички контакт помеѓу бакар-бакар-сулфатна рефентна електрода и почвата.Оваа барање е многу тешко, а понекогаш иневозможно да се оставри на местата покрие-ни со асфалт, или други изолирачки материја-ли. На местата каде тешко се воспоставуваконтакт на референтна електрода со површи-ни на почва, резултатите се ненадежни. Освентоа, методата бара провлекување на меренпроводник од најблизок контролен столб доместо на мерење, што во случај на препрекина траса преставува дополнителна тешкотија.
Од дијаграм на Сл.1, се гледа дека крива нараспределба на поларизирачки потенцијалвдолж цевководот и крива на распределба наповратна струја во цевковод се слични однос-но идентични, но во друг размер. Ова произле-гува од фактот што поларизирачки потенци-јал во дадена точка од цевководот е во функ-ција од просечна густина на поларизирачкиструи, додека повратната струја е збир на ситеполаризирачки струи. Поларизирачка струјапреставува производ од просечна густина и со-одветна површина. Врз основа на изложенотосе доаѓа до заклучок дека со мерење на по-вратни струи вдолж цевководот, односнооткривање на нејзини аномалии се добива иувид во распределба на заштитен потенцијал.
За мерење интензитет на повратни струи вобило која точка на цевковод може да се меријачина на магнетно поле, што овие струи госоздават при свое протечување низ цевково-дот. Магнетното поле во стабилни системи едирекно пропорционално со интензитет наструја што протекува низ цевководот. Распре-делба на магнетното поле е во облик на кон-центрични прстени околу цевковод како про-водник и се менува вдолж цевководот.
(1)
Каде: В - јачина на магнетно поле кај сензо-рот,
/ - повратна струја во цевковод
R -растојание од центар на цевка до сензор
Повратната струја се зголемува од крајот нацевковод кон место на напојување односно
1 = 1ое-т (3)
Каде:
1О - Струја на станица за катодна заштита
1Х - Струја на растојание х од станицата
a - Коефициент на слабеење
Детектирање на магнетното поле околу це-вковод е едноставно во случај на наизменичниполиња. Во тој случај во калемот кој се кори-сти за детекција, се индуцира електромоторнасила пропорционална на интензитвх на маг-нетното поле. Co оглед дека цевководот се на-оѓа под катодна заштита, а системот за катод-на заштита работи со нефилтрирана исправе-на струја чија брановитост е со фрекфренцијаод 100 Hz, па во вакви случаи калемот за де-текција се подесува на 100 Hz и се вршат ме-рења.
Co мерење на интензитетот на магнетното по-ле над цевководот и познавајќи ја длабочина-та на цевководот, може да се заклучи за јачи-на на повратна струја, а со тоа и за потенцијална цевководот во однос на почвата. Секоја ре-гистрирана аномалија во распределба на маг-нетно поле, одговара на распределба на потен-цијал вдолж цевководот. Co проверка на тиеместа, со дирекно мерење на потенцијал можеда се утврдат причините за аномалиите и да сепреземат мерки за да се обезбеди заштитенпотенцијал и на таа делница од цевководот.
При мерење интензитет на магнетно поле,мерниот уред е во вид на калем со соодветнаопрема за засилување и обработка на сигна-лот, кој што се пренесува над трасата на це-вководот. He ce бара директен контакт нитусо цевковод ниту со почва над цевковод, зара-ди што мерењата може да вршат и на местакаде цевководот се наоѓа испод асфалт и дру-ги изолирачки површини, вода и сл.
Препреките се лесно совладуваат бидејќи He-Ma потреба од долги проводници кои се повр-жани за инструмент, референтна електродаили контролен столб. Овие мерења се конти-нуирани, а моменталните вредности на изме-рените големини во одредени временски ин-тервали односно одредени растојанија се сни-
А-150
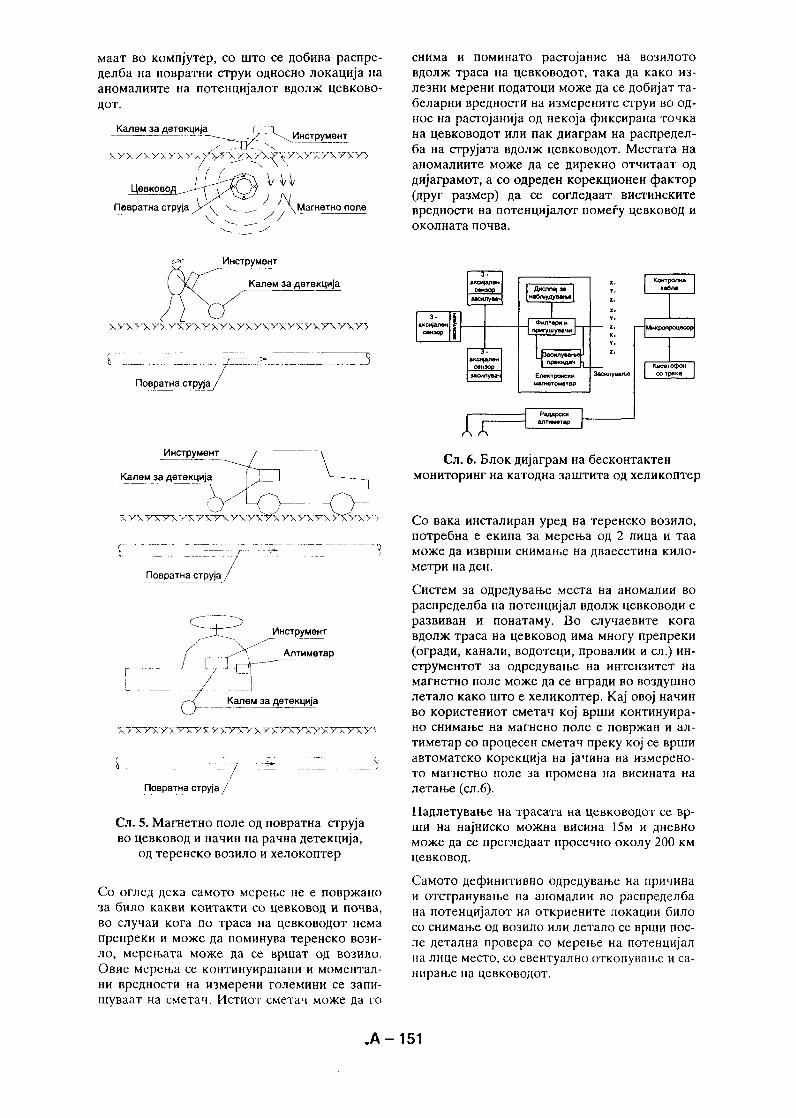
маат во компјутер, со што се добива распре-делба на повратни струи односно локација нааномалиите на потенцијалот вдолж цевково-ДОТ.
Калем за детекција
Цевково
Повратнаструја
Инструмент
У\ >'
Магнетнополе
снима и поминато растојание на возилотовдолж траса на цевководот, така да како из-лезни мерени податоци може да се добијат та-беларни вредности на измерените струи во од-нос на растојанија од некоја фиксирана точкана цевководот или пак диаграм на распредел-ба на струјата вдолж цевководот. Местата нааномалиите може да се дирекно отчитаат оддијаграмот, a co одреден корекционен фактор(друг размер) да се согледаат вистинскитевредности на потенцијалот помеѓу цевковод иоколната почва.
Инструмент
Калем за детекција
'ХУХУХУХУУУХУ}
~:zr: ZZI3Повратна струја ,
Инструмент
Повратна струја /
Инструмент
Алтиметар
Капем за детекција
ХУХУГУГУ\ УХУХ^ХТТ: У У >
Повратна струја /
Сл. 5. Магнетно поле од повратна струјаво цевковод и начин на рачна детекција,
од теренско возило и хелокоптер
Co оглед дека самото мерење не е повржаноза било какви контакти со цевковод и почва,во случаи кога по траса на цевководот немапрепреки и може да поминува теренско вози-ло, мерењата може да се вршат од возило.Овие мерења се континуиранани и моментал-ни вредности на измерени големини се запи-шуваат на сметач. Истиот сметач може да го
аксијалеи Комтролиат«бла
— Микропроцесор
Сл. 6. Блок дијаграм на бесконтактенмониторинг на катодна заштита од хеликоптер
Co вака инсталиран уред на теренско возило,потребна е екипа за мерења од 2 лица и тааможе да изврши снимање на дваесетина кило-метри на ден.
Систем за одредување места на аномалии вораспределба на потенцијал вдолж цевководи еразвиван и понатаму. Во случаевите когавдолж траса на цевковод има многу препреки(огради, канали, водотеци, провалии и сл.) ин-струментот за одредување на интензитет намагнетно поле може да се вгради во воздушнолетало како што е хеликоптер. Кај овој начинво користениот сметач кој врши континуира-но снимање на магнено поле е повржан и ал-тиметар со процесен сметач преку кој се вршиавтоматско корекција на јачина на измерено-то магнетно поле за промена на висината налетање (сл.6).
Надлетување на трасата на цевководот се вр-ши на најниско можна висина 15м и дневноможе да се прегледаат просечно околу 200 кмцевковод.
Самото дефинитивно одредување на причинаи отстранување на аномалии во распределбана потенцијалот на откриените локации билосо снимање од возило или летало се врши пос-ле детална провера со мерење на потенцијална лице место, со евентуално откопување и са-нирање на цевководот.
.А-151

ЗАКЛУЧОКREFERENCES:
Наоѓањето места на аномалии во распределбана заштитен потенцијал вдолж цевководотпод катодна заштита е многу важно. Местатакаде распределба на заштитен потенцијал по-кажуваат отстапување од проектиранитевредности, укажуваат на можност од постое-ње на локални корозивни ќелии, кои не се ка-тодно заштитени и може да бидат места накои се одвива локална појачана корозија.Откривањето на таквите места со класиченметод е доста тешко и бара ангажирање на по-веќечлена екипа. Опишаната постапка на бе-сконтактно пратење работа на системот за ка-тодна заштита и одредување место на анома-лии во распределба на потенцијал ги сведуваовие интензивни мерења на едноставни мере-ња. Наведените мерења може успешно да сеспроведат само ако трасата на цевководотточно дефинирана и обележана додека за слу-чај на мерења од летало потребна е и сателит-ска навигација.
1. William A. Read, Airborne magnetometar moni-tors cathodic protection,, AGA GAS Transmissi-on Conference, May 1982, Chicago, IL.
2. Istvan Szalai, Description of instrument techni-ques used for corrosion inspection of buried pi-pelines, Budapest 1997.
3. J. Cinkler, Corrosion Engineering - Lecture No-tes to the Specialits Corrosion Course, VOEST-ALPINE Linz Austria, 1991
4. Transwave Expert Risk Management System -Users manual Transwave International - DaytonOhio 1996
5. Test Reports of Intensive Measurements Perfor-med on Pipelines Owned by Naftagas from 1985-1988, NIS Engineering,
6. Nick J. Frost, Electromagnetic techniquies for mo-nitoring pipelines coatings, National Associationof Corrosion Engineers, conference in
Summary
CONTACTLESS MONITORING OF CATHODIC PROTECTION
Zoran Angelovski1, Julie Cinkler2 Dragan Stankovski3
lFZC 11 OKTOMVRI - Kumanovo, "11 Noemvri". 86, [email protected] ZA PREVENTIVU - Novi Sad, "Kraljevica Marka", 11, SCG,[email protected]
3Facculty of Electrical Engineering,Karposh II, bb, 1000 Skopje, [email protected]
Cathodic protection is a very efficient and economi-cal way for protecting underground structures fromelectrolytic corrosion. The protection is maintainedwhen the potential between the structure surface andthe surrounding electrolite keeps the material in animmune state from corrosion. This means, that thepotential on every spot of the protected pipeline sho-uld be checked and maintained. Checking the poten-tial can be on few way. The classical way, measuringthe pipe to soil potential on the test post spaced 1 - 2km apart only "potential samples" can be obtainedwhile "hot spots" can be left between the test post.The so called "intensive measurements", when poten-tial is surveyed along the pipeline by a moving elec-trode connected to a test post. By checking the mag-netic field of the returning current along the pipeline,the same anomalies can be found, as by checking thepotential distribution along the pipeline, so the places
with contacts with foreign structures or coating da-mages can be located.
This measurements can be done by one person wal-king along the pipeline route. If the pipe route is wit-hout obstacles, the measurements can be performedfrom a vehicle moving along the pipe route. By usinga computer based recording device in the vehicle, themeasured values can be combined with the locationof the anomalies and the printout will show directlythe sort and location of the anomalies. Using a heli-copter, when up to sevaral hunders of km pipeline ro-ute can be checked daily, makes further improve-ments. This paper present curent situation on this fi-eld, and equipment in FZC 11 Oktomvri in Kumano-vo.
Key words -Cathodic protection, steel pipeline, con-tactless monitoring, corrosion
A - 1 5 2