convex and concave hulls for classification with support vector machine
TRANSCRIPT
Author's Accepted Manuscript
Convex and concave hulls for classificationwith support vector machine
Asdrúbal López Chau, Xiaoou Li, Wen Yu
PII: S0925-2312(13)00644-9DOI: http://dx.doi.org/10.1016/j.neucom.2013.05.040Reference: NEUCOM13493
To appear in: Neurocomputing
Received date: 1 June 2012Revised date: 19 March 2013Accepted date: 27 May 2013
Cite this article as: Asdrúbal López Chau, Xiaoou Li, Wen Yu, Convex andconcave hulls for classification with support vector machine, Neurocomputing,http://dx.doi.org/10.1016/j.neucom.2013.05.040
This is a PDF file of an unedited manuscript that has been accepted forpublication. As a service to our customers we are providing this early version ofthe manuscript. The manuscript will undergo copyediting, typesetting, andreview of the resulting galley proof before it is published in its final citable form.Please note that during the production process errors may be discovered whichcould affect the content, and all legal disclaimers that apply to the journalpertain.
www.elsevier.com/locate/neucom

Convex and Concave Hulls for Classification with
Support Vector Machine
Asdrubal Lopez Chau1,2, Xiaoou Li1, Wen Yu3,∗
1Departamento de Computacion, CINVESTAV-IPN
Mexico City, 07360, Mexico
2Universidad Autonoma del Estado de Mexico (UAEM)
Zumpango, Estado de Mexico, 55600, Mexico
2Departamento de Control Automatico, CINVESTAV-IPN
Mexico City, 07360, Mexico, [email protected]
∗Corresponding author
Abstract
The training of a support vector machine (SVM) has the time complexity of O(n3)
with data number n . Normal SVM algorithms are not suitable for classification of
large data sets. Convex hull can simplify SVM training, however the classification
accuracy becomes lower when there are inseparable points. This paper introduces
a novel method for SVM classification, called convex-concave hull. After grid pre-
processing, the convex hull and the concave (non-convex) hull are found by Jarvis
march method. Then the vertices of the convex-concave hull are applied for SVM
training. The proposed convex-concave hull SVM classifier has distinctive advantages
on dealing with large data sets with higher accuracy. Experimental results demonstrate
that our approach has good classification accuracy while the training is significantly
faster than the other training methods.
1 Introduction
Support Vector Machine (SVM) is a popular classification method in machine learning [30].
It minimizes the empirical classification error and maximizes the geometric margin. It offers
1
a hyperplane that represents the largest separation (or margin) between two classes [24].
However this kind of maximum-margin hyperplane may not exist because of class overlapping
or mislabeled examples. The soft margin SVM by introducing slack variables can find a
hyperplane that splits the examples as cleanly as possible. In order to find a separation
hyperplane, it is necessary to solve the Quadratic Programming Problem (QPP). This is
computational expensive, it has O(n3) time and O(n2) space complexities with n data [24].
so the standard SVM is unfeasible for large data sets [25].
Many researchers have tried to find possible methods to apply SVM classification for
large data sets. These methods can be divided into four types: a) reducing training data
sets (data selection), b) using geometric properties of SVM, c) modifying SVM classifiers,
d) decomposition, and e) the other methods. The data selection method chooses the objects
which are possible to be the support vectors (SV) [20]. These data are used for SVM training.
Generally, the number of the support vectors is much small compared with the whole data.
Clustering is another effective tool to reduce data set size, for example, hierarchical clustering
[33] and parallel clustering [26]. The sequential minimal optimization (SMO) [25] breaks the
large QP problem into a series of smallest possible QP problems. The projected conjugate
gradient (PCG) chunking scales somewhere between linear and cubic in the training set [8].
The geometric properties of SVM can also be used to reduce the training data. In sep-
arable case, the maximum-margin hyperplane is equivalent to finding the nearest neighbors
in the convex hulls of each class [2]. Neighborhood properties of the objects can be applied
to detect SV. In [18] an active learning model of sample selection is proposed. The model
is based on the measurement of neighborhood entropy. In [19] is proposed an algorithm
that selects the patterns in the overlap region around the decision boundary. The method
presented in [4] follows this trend but it uses fuzzy C-means clustering to select samples on
the boundaries of class distribution. The most popular geometric methods are the nearest
points problem (NPP) and the convex hull.
NPP was first reformulated to solve SVM classification in [18]. The data which are close
to those opposite label have high probability to be SV. The Euclidean distance between
these data and the opposite label are computed to find the shortest distance. The problem
of this method is the computation time is O(n2). Gilbert’s algorithm [12] is one of the first
algorithms for solving the minimum norm problem (MNP) in NPP. The MDM algorithm
suggested by Mitchell et al. [22] works faster than Gilbert’s algorithm. The NPP method is
also extended to solving the SMO-SVM optimization problem in the image processing [19].
Since the support vectors are usually located in local extremum or near extremum [1], using
extremes examples from the full training set can reduce training set [14].
2
The key problem is how to find the border of a data set. K-nearest neighbor (KNN)
method is a good method. The local data distribution and local geometrical property were
applied in [31][20]. Minimum enclosing ball is applied to SVM classification in [4]. Ap-
proximately optimal solutions of SVM are obtained by core vector machine (CVM) in [29].
Schlesinger-Kozinec (SK) algorithm [28] used the geometric interpretation of SVM. The
maximal margin classifier with a given precision for separable data was obtained.
Convex hull has been applied in training SVM in [1][2][21]. There are some algorithms
to compute the convex hull with finite points. Graham scan [13] finds all vertices of the
convex hull along its boundary by computing the direction of the cross product of the two
vectors. Jarvis’ march (Gift wrapping) [17] identifies the convex hull by angle comparisons
and wrapping a string around the point set. Divide and Conquer method [27] is applicable to
the three dimensional case. The incremental convex hull [23] and quick hull [9] give methods
to eliminate useless points.
In many real applications the data are not perfectly separated, and the kernel method
is not so powerful for nonlinear separation. In these cases, the closest points in the convex
hulls are no longer support vectors. In this case, the soft SVM . Although the soft margin
optimization with the slack variable, the penal parameter C effects the optimal performance
of SVMs can be applied directly. The optimization becomes a trade off between a large
margin and a small error penalty [24].
Another method is to use the reduced convex hull [21]. The intersection parts disappear
by reducing the convex hulls. The inseparable case becomes separable case. The main
disadvantage of the reduced convex hull is the convex hull has to be calculated in each
reducing step [2]. Variant SVM (v-SVM) [6] can make the intersection set be empty by the
choice of parameters. The v-SVM is similar with the reduced convex hull, the computation
process is complex.
Concave-convex procedure (CCCP) [32] separates the energy function into a convex func-
tion and a concave (non-convex) function. By using a non-convex loss function, it forms a
non-convex SVM. But some good properties of SVM, for example the maximum margin,
cannot be guaranteed [7], because the intersection parts of data sets are not satisfied convex
conditions.
In this paper we propose a new algorithm, called convex-concave hull, to search the points
that are on the outer boundaries of a set of points. By using Jarvis’ march method, we first
compute the convex hulls. Then the concave hulls are created by using the vertices of the
convex hull. In this way, the misleading points in the intersection become the vertices of the
concave hulls. The classification accuracy is increased compared with the other geometric
3

methods, such as the reduced convex hull SVM (RCHSVM) and v-SVM. The training time
is decreased considerably. The experimental results show that the accuracy obtained by our
convex-concave hull approach is very close to classic SVM methods, while the training time
is significantly shorter.
2 Convex and Concave Hull
2.1 Convex Hull
The convex hull (CH) of a set of points S is the minimum convex set that contains S.
Mathematically, CH is defined as
CH(X) :
{w =
n∑i=1
aixi, ai ≥ 0,n∑
i=1
ai = 1, xi ∈ X
}(1)
For SVM classification, a data set X has the general form as
X ={(xi, yi), xi ∈ Rd, yi = {+1,−1}
}(2)
where d is the number of features, yi is the label of object xi.
Let’s create two subsets X+ and X−, X = X+ ∪X−
X+ ={(xi, yi), xi ∈ Rd and yi = {+1}
}(3)
X− ={(xi, yi), xi ∈ Rd and yi = {−1}
}(4)
If CH(X+) ∩ CH(X−) = ∅, there is not intersection. It is called linearly separable. The
optimal separating hyperplane is determined by the closest pair of points that belong to X+
and X− [1][2]. The problem can be stated as
minxi∈X+xj∈X−
∥∑M
i=1 αixi −∑L
j=1 αjxj∥2∑Mi=1 αi = 1,
∑Lj=1 αj = 1, αi ≥ 0, αj ≥ 0
(5)
where | X+ | is the size of the set X+. Let us define | X+ |= M and | X− |= L.
In this linearly separable case, the ”‘hard”’ optimal separating hyperplane is a vector
that is normal to the line which joints the closest points, see Figure 1.
In the most case, the data are not linearly separable. The convex hulls intersect each
other, see Figure 2. (5) does not have solution. It is necessary to map the objects to a higher
dimensional space to allow mis-classification. The separating hyperplane is ”soft”. The soft
margin separating hyperplane is shown in Figure 2.
4

y=-1y=+1
w
Separating hyper plane
Figure 1: Linearly separable case
2.2 Concave Hull
In no-linearly separable case, most geometric methods have to shrink or reduce the convex
hull to avoid the overlapping. In our method, the convex hull is not changed. We detect
the objects that are close to exterior boundaries. In order to detect these objects, we use
concave hull. The border points B(X) of a set X ∈ R2 are vertices of a ”convex-concave
hull”, if they hold the following properties:
1. The vertices of a convex-concave hull B(X) are the vertices of a convex hull (CH) andthe points that are closed to the edges of CH
B(X) = VCH(X) ∪ CloseCH (6)
where VCH(X) is vertex set of the convex hull, CloseCH is the set that is closed to the edges
of the convex hull. The ”closeness” to an edge of CH(X) is different from point to point, so
there is no unique set of border points.
2. B(X) is not a convex hull. A set S ∈ R2 is said to be convex CH(X) if
x1, x2 ∈ S, then αx1 + (1− α)x2 ∈ S, for all α ∈ (0, 1) (7)
Generally, a polygon defined by (6) does not satisfy (7).
3. The border points must be part of the data set
B(X) ⊆ X (8)
It can be proved that (8) implies
max |B(X)| = |X| ∀ X (9)
5

Supportvectors
Optimal (soft margin)separatinghyper plane
Error
allowed
Misclassified
sample
Figure 2: Linearly inseparable case
where |X| refers to the number of elements in set X.
4. The minimum size of B(X) is defined by
min |B(X)| = |VCH(X)| (10)
In the following subsection we describe a method to detect the vertices of a convex-
concave hull.
2.3 Searching the vertices of a Convex-Concave Hull
The first object is to find the extreme points by computing CH(X) from given a set X =
{x ∈ R2}. For any two adjacent vertices vi and vj in CH(X), it is clear that all other points
in X must be located on one side of the line vi− vj. If an edge E is formed by two adjacent
vertices vi and vj of CH(X), they are used as reference points to detect the concave hull
B(X). The procedure is summarized as follows:
1. Compute the convex hull CH(X)
2. Search the points which are closed to each edge of CH(X)
3. Repeat Step1 and Step 2 until all local neighbors are reached.
These steps are realized by the following algorithm.
Algorithm 1 (Convex-Concave Searching Scheme)
Input
X: Set of points.
6

K: Number of candidates.
Output:
B(X):Convex-concave hull
Begin algorithm
// Set of vertices begins empty
B(X)← ∅Compute CH(X)
The vertices of CH(X) are v1,...,vn
for each pair of adjacent vertexes (vi, vj) do
θ ← compute angle defined by (vi, vj ) as cos−1
(−→vi ·−→vj
∥−→vi∥·∥−→vj∥
)//Detect points ”close” to edge (vi, vj )
Apply Algorithm 2 using (X, (vi, vj), K, θ)
B(X)← B(X) ∪ CloseCH
end for
End algorithm
We use Algorithm 2 to search the nearest points to the edges of CH(X). It works as
follows: Given a set of points X and two reference points vi, vj, the algorithm begins with
the point vi and finds its K nearest neighbors.
From each neighbor, we search the point vk such that which −−→vivk has the smallest angle
with respect to line −−→vivj
θmin = mink
[cos−1
( −−→vivk · −−→vivj∥−−→vivk∥ · ∥−−→vivj∥
)](11)
This procedure is repeated until vk = vj, see Figure 3. The closest points to the edge of
CH(X) are the nearest points to the edges of CH(X). Figure 3 shows an example where
K = 3
Algorithm 2 (Search the neareat points)
Input
X : A set of points
S: Two adjacent vertices {vi, vj} of CH(X)
K: Number of neighbors
θ : The previous angle angle between adjacent vertices
Output
7

Figure 3: Algorithm 2 searches for points that are close to an edge of CH(X)
CloseCH(X) : The set of points close to edge defined by adjacent vertices {vi, vj}Begin algorithm
currentPoints← vi;
stopPoint← vj;
CloseCH(X) ← vi;
whilecurrentPoint = vj do
candidates←get the K nearest points to currentPoint;
Compute the angle of every pi ∈ candidates w.r.t. to angle θ;
Sort candidates by increasing angle;
for each point pi ∈ candidates
Define L as a segment of line defined by pi and currentPoint;
if L do not intersect the convex-concave hull then
CloseCH(X)← CloseCH(X) ∪ pi;
exit this loop;
end if
end for
if no point was added in last loop then
CloseCH(X)← CloseCH(X) ∪ vj;
return CloseCH(X);
end if
Remove currentPoint from X;
Update θ using the two more recently added points of CloseCH(X);
ifcurrentPoint = vjthen
8
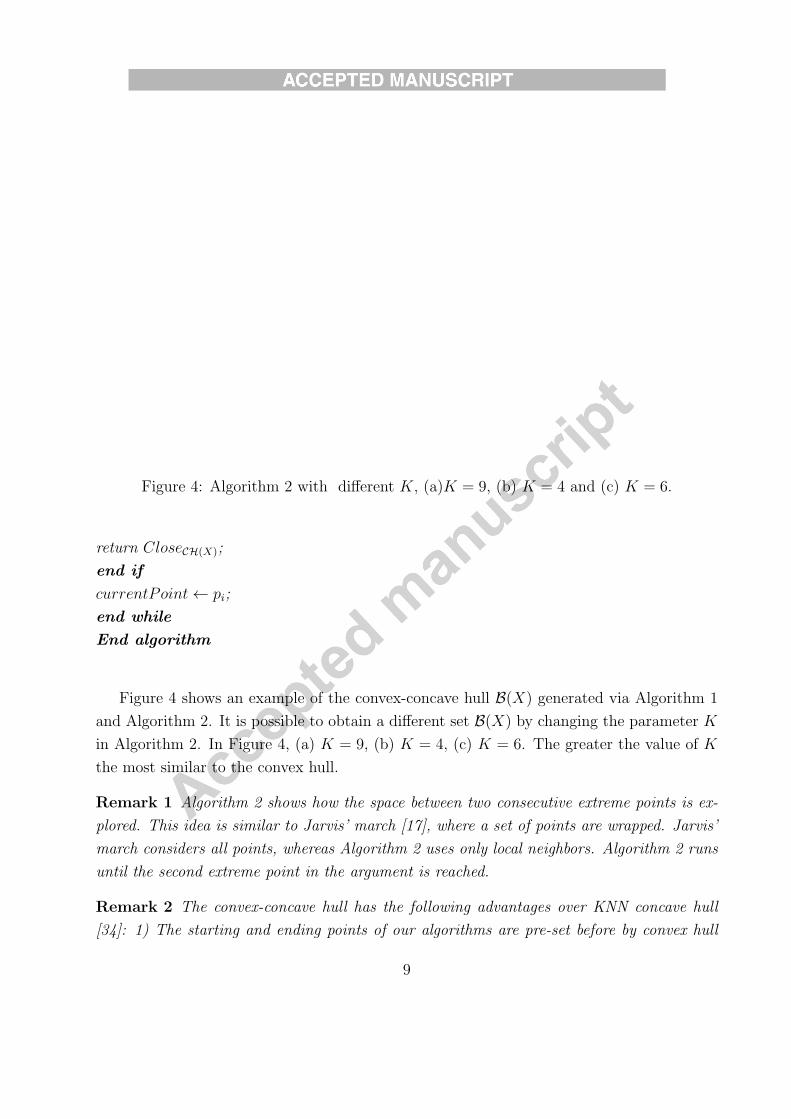
Figure 4: Algorithm 2 with different K, (a)K = 9, (b) K = 4 and (c) K = 6.
return CloseCH(X);
end if
currentPoint← pi;
end while
End algorithm
Figure 4 shows an example of the convex-concave hull B(X) generated via Algorithm 1
and Algorithm 2. It is possible to obtain a different set B(X) by changing the parameter K
in Algorithm 2. In Figure 4, (a) K = 9, (b) K = 4, (c) K = 6. The greater the value of K
the most similar to the convex hull.
Remark 1 Algorithm 2 shows how the space between two consecutive extreme points is ex-
plored. This idea is similar to Jarvis’ march [17], where a set of points are wrapped. Jarvis’
march considers all points, whereas Algorithm 2 uses only local neighbors. Algorithm 2 runs
until the second extreme point in the argument is reached.
Remark 2 The convex-concave hull has the following advantages over KNN concave hull
[34]: 1) The starting and ending points of our algorithms are pre-set before by convex hull
9
method. It ensures all vertices of convex hull are always in the vertices of convex-concave
hull. 2) The angles in [34] are entirely depended on the previously computed ones. In our
method, the extreme points are used to compute the angles, so it is easy to implement. 3)
Our algorithm does not use recursive invocations. The stop point is added to the set of border
points when there are no more points, the search time is less than [34].
2.4 Properties of Convex-Concave Hull
In this section, we propose three interesting properties of our convex-concave hull methods.
These properties can be to formulate a simple pre-processing algorithm, which helps to find
the exterior boundaries of the points X fast.
Property 1 The vertexes of convex hull VCH(X) is a subset of the vertexes of convex-concave
hull B(X)
VCH(X) ⊆ B(X)
The searching algorithm first computes CH(X), then uses two extreme points vi and vj
in CH(X) to search concave points B(X). At the last iteration, B(X) contains all vertices
of CH(X).
Remark 3 The property 1 ensures that the optimal separating hyperplane can be obtained
in linearly separable cases, if B(X) is used for SVM training.
Property 2 A superset of the convex-concave hull B(X) can be obtained by detecting border
points by partitions of X, i.e., ∪i
B(X i) ⊇ B(X) ⊇ CH(X)
where X i is the partitions of X, ∩CH(X i) = ∅ and ∪X i = X.
Let us create j partitions on the input space X ∈ R2, i.e.,
∩X i = ∅ and ∪X i = X
Suppose each partition X i contains at least three points that belong to X. It is not difficult
to see that the vertices of convex hull VCH(X) is a subset of ∪VCH(Xi). We define two partitions
as CH(X1) and CH(X2). It is clear that
VCH(X) ⊂ VCH(X1) ∪ VCH(X2)
10
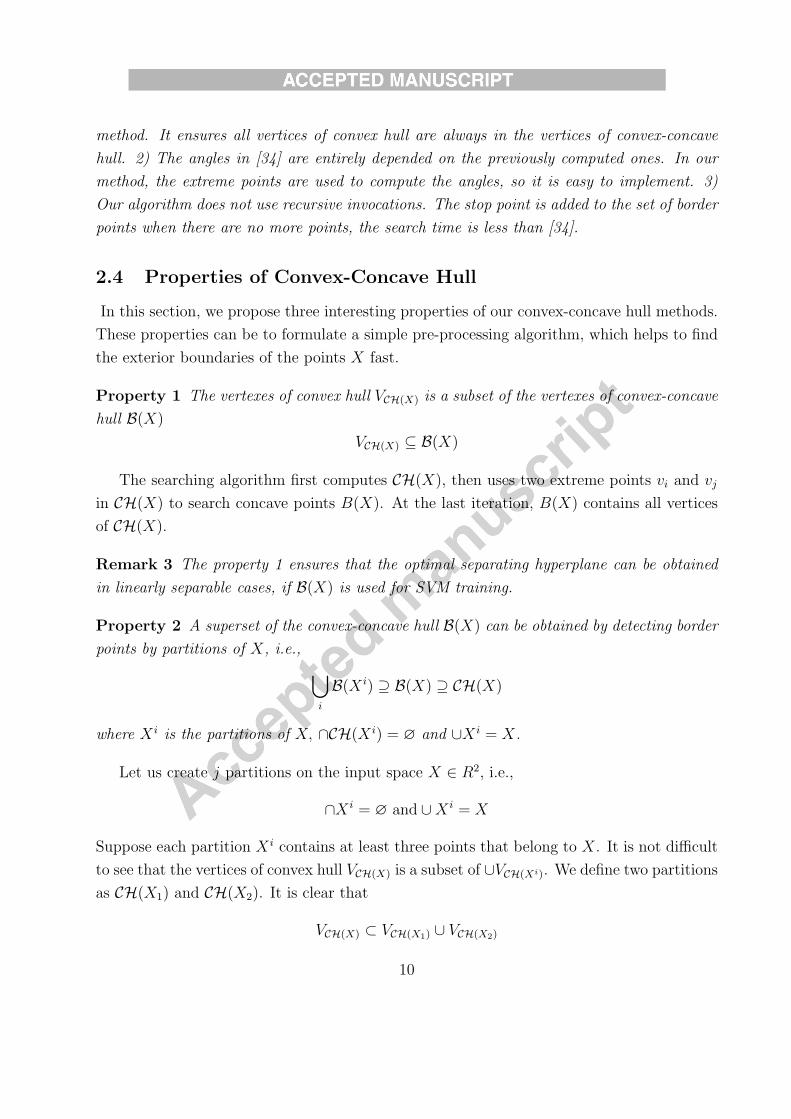
Applying Algorithm 1 and Algorithm 2 on X1 and X2, two convex-concave hulls B(X1) and
B(X2) are generated. Obviously, the join of them is a superset of the convex concave hull of
X, i.e.,
B(X) ⊂ B(X1) ∪ B(X2)
Figure 5 explains this property.
Figure 5: A super set of B(X) can be obtained by applying Algorithms 1 and 2 on partitions
of X
Remark 4 All extreme points in X must be included in B(X). If the convex-concave hull
search algorithm is applied on the disjoint partitions of X, the result data set must contain
all the vertices of convex-concave hull from X.
3 SVM Classification via Convex-Concave Hull
3.1 Data Set Pre-process
The convex-concave hull searching scheme behaves good if the data set X has a uniform
distribution of elements in a region. However, the distribution of a data set is unknown in
advance. Computing the convex-concave hull B(X) directly from X is not appropriate for
training the SVM classifier. In order to avoid the density problem, we separate X into X+
and X− and then we create partitions. The basic idea here is to obtain regions where the
11
distribution is more uniform than in the original ones. The property 2 allows us to claim
that all vertices of convex hull can be included in the vertexes of the convex concave hull
VCH(X) ⊆ VB(X)
In addition, the points in intersection of convex hulls are also included in B(X). This is
helpful for linearly inseparable cases for SVM classification. Property 1 gives guaranty
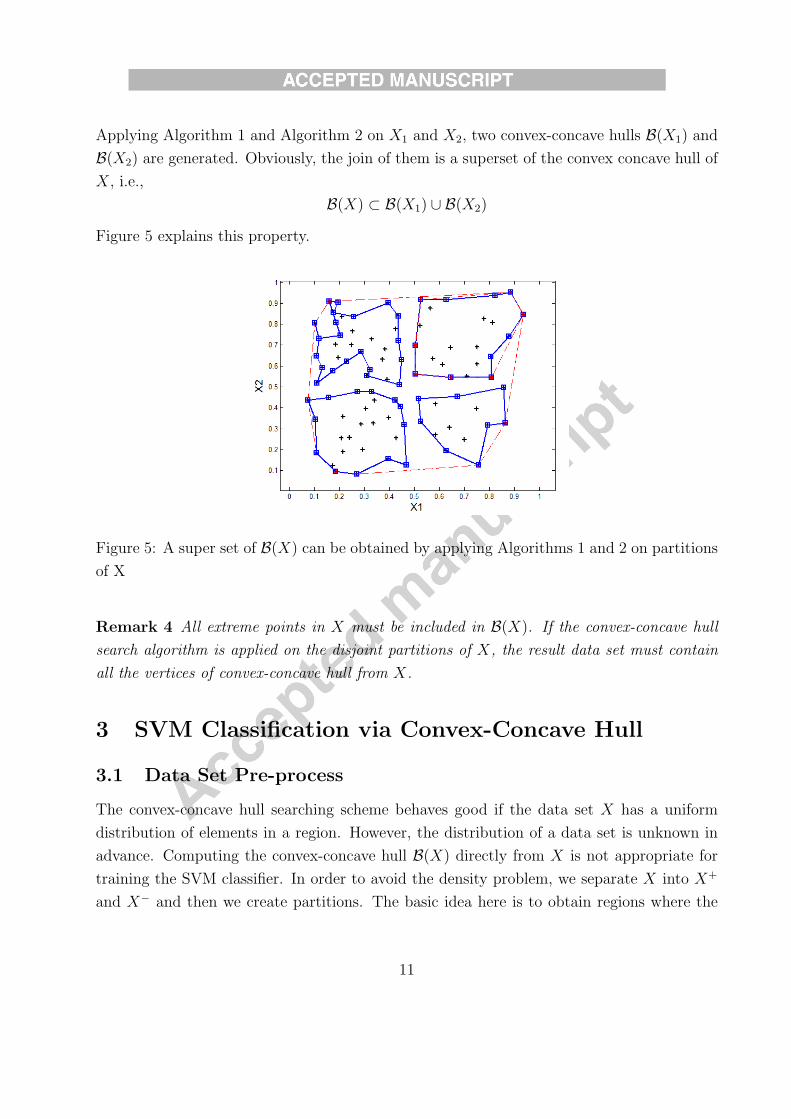
that all vertexes of convex hull will be also included. Figure 6 shows the general steps to
apply our method to training sets.
Figure 6: General process of the method
The partition of input space can avoid the bottleneck problem in the border point de-
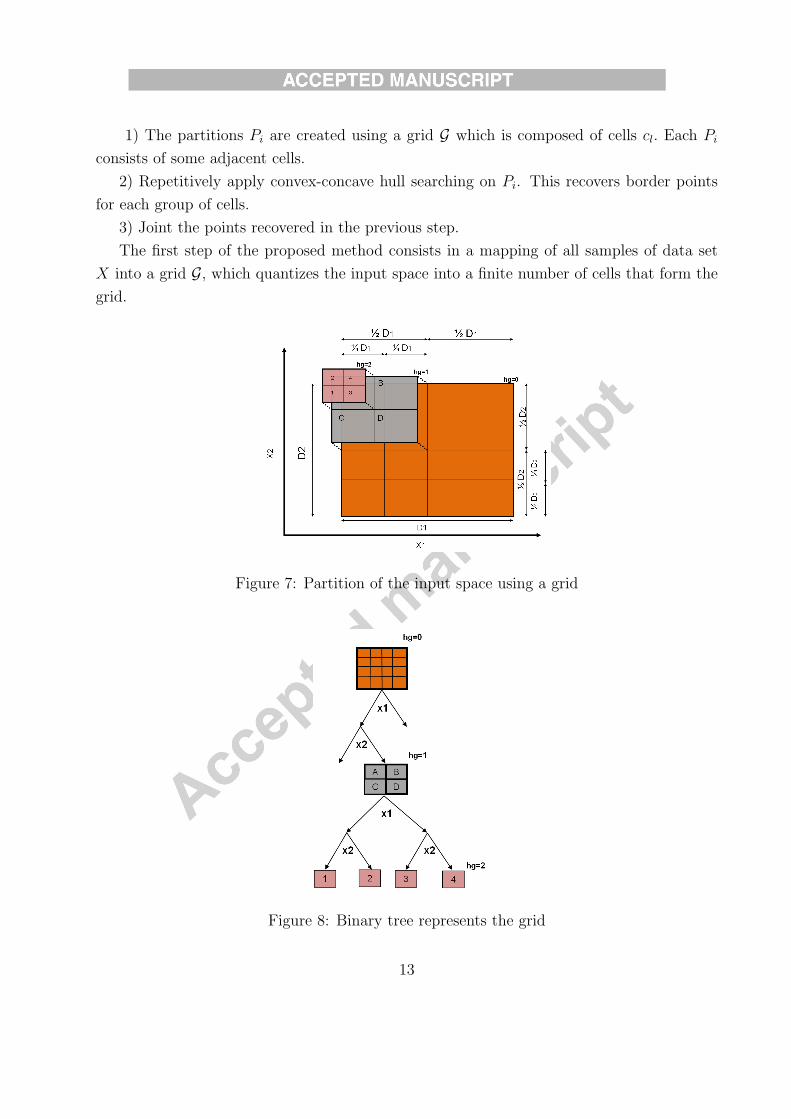
tection. The subsets Pi can be quickly created by introducing all points in a binary tree of
height h and then using the leaves as a version of the original points. Once all points have
been introduced in the binary tree, it is possible to look down from height hg < h of the tree
and take all leaves as a subset Pi.
We propose a grid method to pre-process the data set. Figure 7 and 8 show the data set
pre-process. It includes:
12
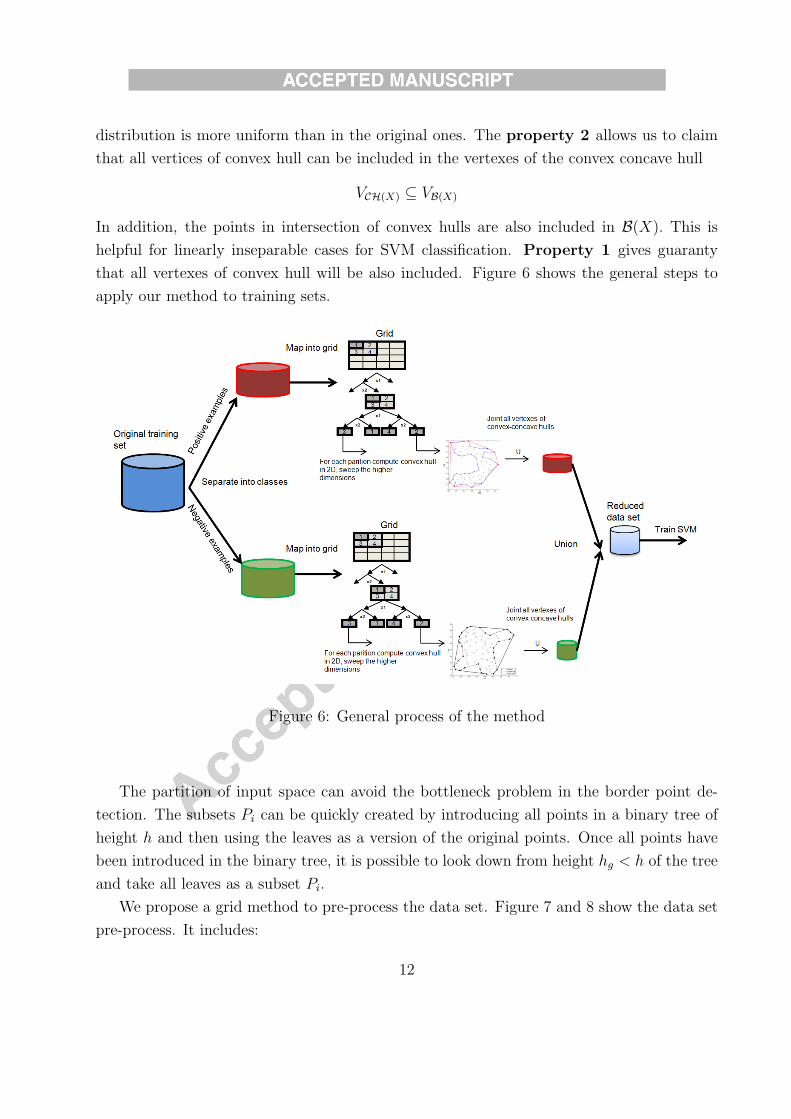
1) The partitions Pi are created using a grid G which is composed of cells cl. Each Pi
consists of some adjacent cells.
2) Repetitively apply convex-concave hull searching on Pi. This recovers border points
for each group of cells.
3) Joint the points recovered in the previous step.
The first step of the proposed method consists in a mapping of all samples of data set
X into a grid G, which quantizes the input space into a finite number of cells that form the
grid.
Figure 7: Partition of the input space using a grid
Figure 8: Binary tree represents the grid
13
We use four parameters to control the grid process: hg, ha, hb and K. Here hg is the
granularity of the grid, i.e., the height of the binary tree. ha is used to create the partitions
in higher dimensions. The binary tree is traverse down in the height of hb. K is used to
control the number of the neighbor points which are close to the edges of the convex hull.
The bigger the granularity, the finer the quantization. However, the amount of memory
required to store the grid is increased. This mapping from X into a G allows to maintain a
set of non repeated points, because they are mapped into the same cells, furthermore, this
can help to reduce the original number of points.
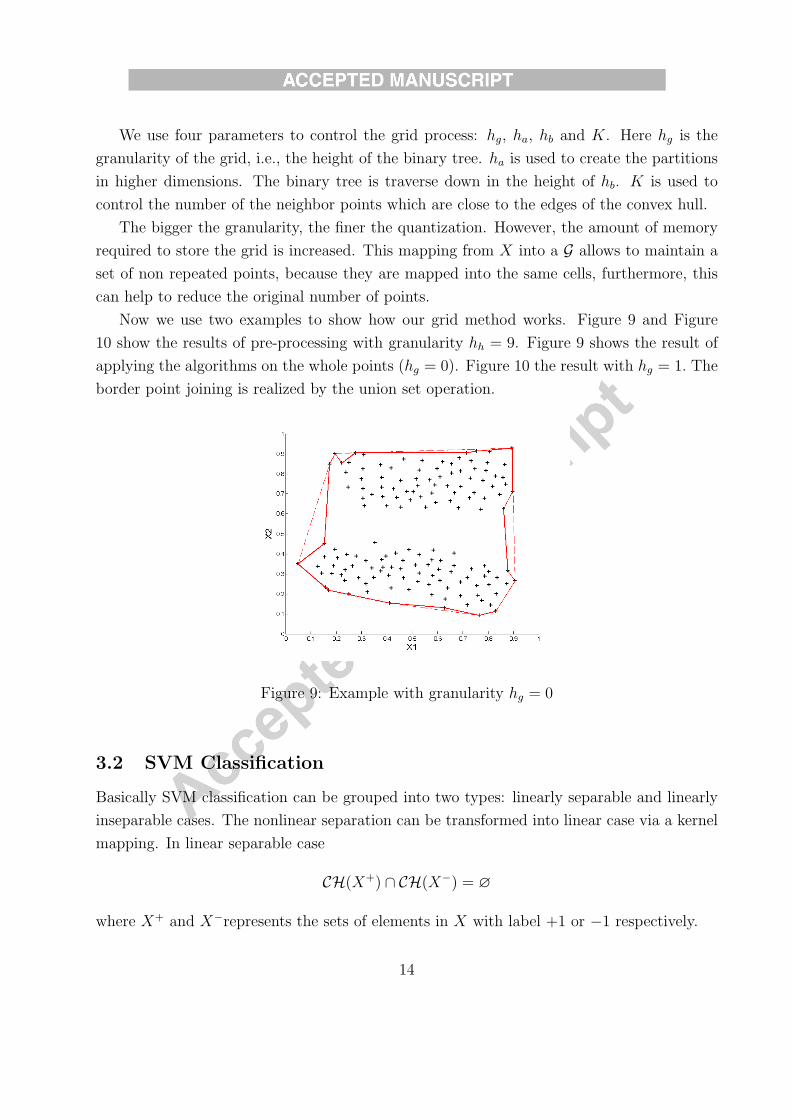
Now we use two examples to show how our grid method works. Figure 9 and Figure
10 show the results of pre-processing with granularity hh = 9. Figure 9 shows the result of
applying the algorithms on the whole points (hg = 0). Figure 10 the result with hg = 1. The
border point joining is realized by the union set operation.
Figure 9: Example with granularity hg = 0
3.2 SVM Classification
Basically SVM classification can be grouped into two types: linearly separable and linearly
inseparable cases. The nonlinear separation can be transformed into linear case via a kernel
mapping. In linear separable case
CH(X+) ∩ CH(X−) = ∅
where X+ and X−represents the sets of elements in X with label +1 or −1 respectively.
14
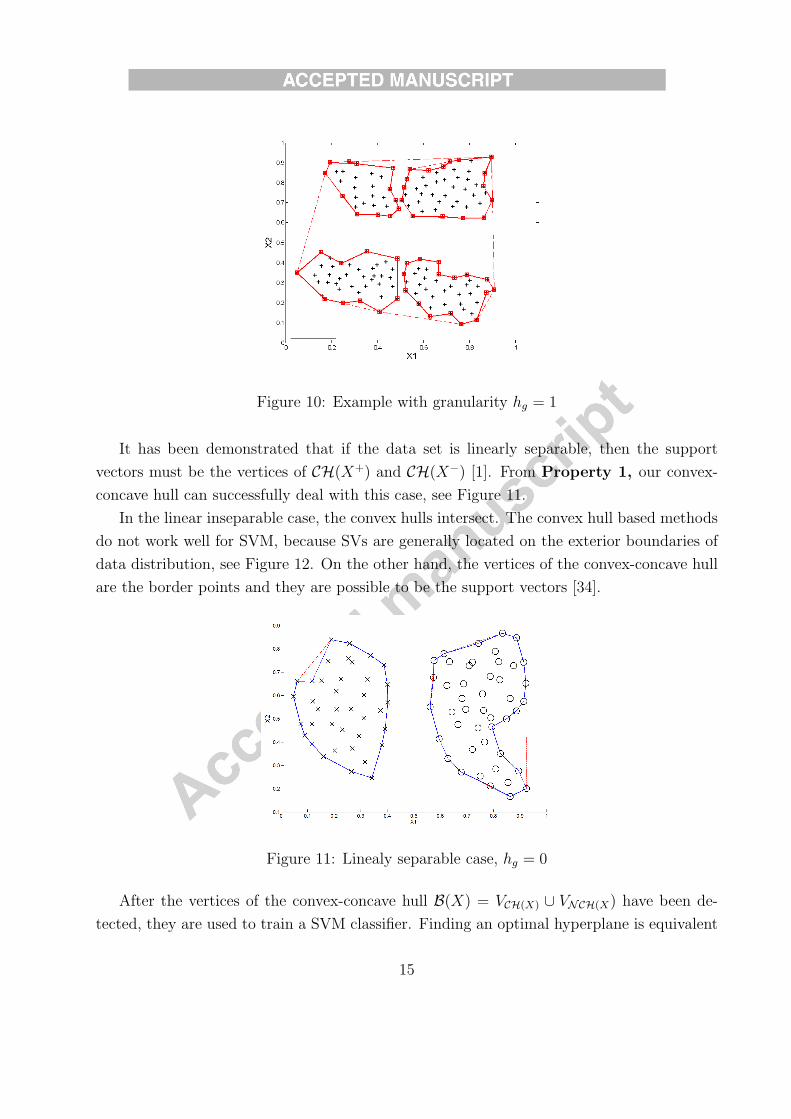
Figure 10: Example with granularity hg = 1
It has been demonstrated that if the data set is linearly separable, then the support
vectors must be the vertices of CH(X+) and CH(X−) [1]. From Property 1, our convex-
concave hull can successfully deal with this case, see Figure 11.
In the linear inseparable case, the convex hulls intersect. The convex hull based methods
do not work well for SVM, because SVs are generally located on the exterior boundaries of
data distribution, see Figure 12. On the other hand, the vertices of the convex-concave hull
are the border points and they are possible to be the support vectors [34].
Figure 11: Linealy separable case, hg = 0
After the vertices of the convex-concave hull B(X) = VCH(X) ∪ VNCH(X) have been de-
tected, they are used to train a SVM classifier. Finding an optimal hyperplane is equivalent
15

Figure 12: Linearly inseparable case, hg = 0
to solve the following quadratic programming problem (primal problem)
minw,b J (w) = 12wTw + C
n∑k=1
ξk
subject : yk[wTφ (xk) + b
]≥ 1− ξk
(12)
where ξk is slack variables to tolerate mis-classifications ξk > 0, k = 1 · · ·n, c > 0, wk is the
distance from xk to the hyperplane[wTφ (xk) + b
]= 0, φ (xk) is a nonlinear function.
The kernel which satisfies the Mercer condition [30] is K (xk, xi) = φ (xk)
T φ (xi) . (12)
is equivalent to the following quadratic programming problem which is a dual problem with
the Lagrangian multipliers αk ≥ 0,
maxα J (α) = −12
n∑k,j=1
ykyjK (xk, xj)αkαj +n∑
k=1
αk
subject :n∑
k=1
αkyk = 0, 0 ≤ αk ≤ c
(13)
It is well known most of solutions are zero, i.e., the solution vector is sparse. The non-zero
αk is called a support vector. Let V be the index set of support vectors, then the optimal
hyperplane is ∑k∈V
αkykK (xk, xj) + b = 0 (14)
The resulting classifier is
y(x) = sign
[∑k∈V
αkykK (xk, x) + b
]
16
where b is determined by Kuhn-Tucker conditions.
In our convex-concave hull SVM classification, the penal factor C can be selected very
small, because all misleading points are almost disappear by the concave algorithm. The
classification accuracy is improved. The other design parameters, such as the parameters of
the kernel, are chosen by the grid search method [24].
3.3 High-Dimension Case
Since the convex-concave hull searching algorithm of this paper must calculate angles, it
works in two-dimension space. In order to extend out method to high-dimension data set,
the dimension reduction is needed. The principal component analysis (PCA) is a common
method to reduce the dimension of data sets, but it is not suitable for large trainings sets.
The general approach for the high-dimension data is as the following:
1) Partition the input space to create a number of partitions X i. These partitions have
a more uniform distribution of objects.
2) Select two features from X i to create a set Y i ∈ R2. The Y i can be viewed as X i with
all its features fixed, at exception of two.
3) Apply convex-concave hull searching on Y i.
4) Explore fixed features for more points.
5) Join the points recovered in the previous steps.
It is well known that computing the convex hull in more than three dimensions is compu-
tational expensive. We solve this problem by searching the vertices of convex-concave hull in
several two-dimension spaces, see Figure 13. In order to extend convex-concave hull to more
than two dimensions, we create partitions on the higher dimensions and reduce temporally
the dimension of the data set in several steps. For each dimension we create one-dimensional
clusters. The center of the corresponding cluster is fixed. The final two-dimensional subsets
are formed with respect to the number of partitions of each dimension. We compute border
samples in these two-dimensional subsets and then get them back to their original dimension
with respect to the fixed center values.
The clustering algorithm is as following.
Algorithm 3 (Clustering higher dimensions)
Data
X :Data set
m:Index of a feature of X
Output
17
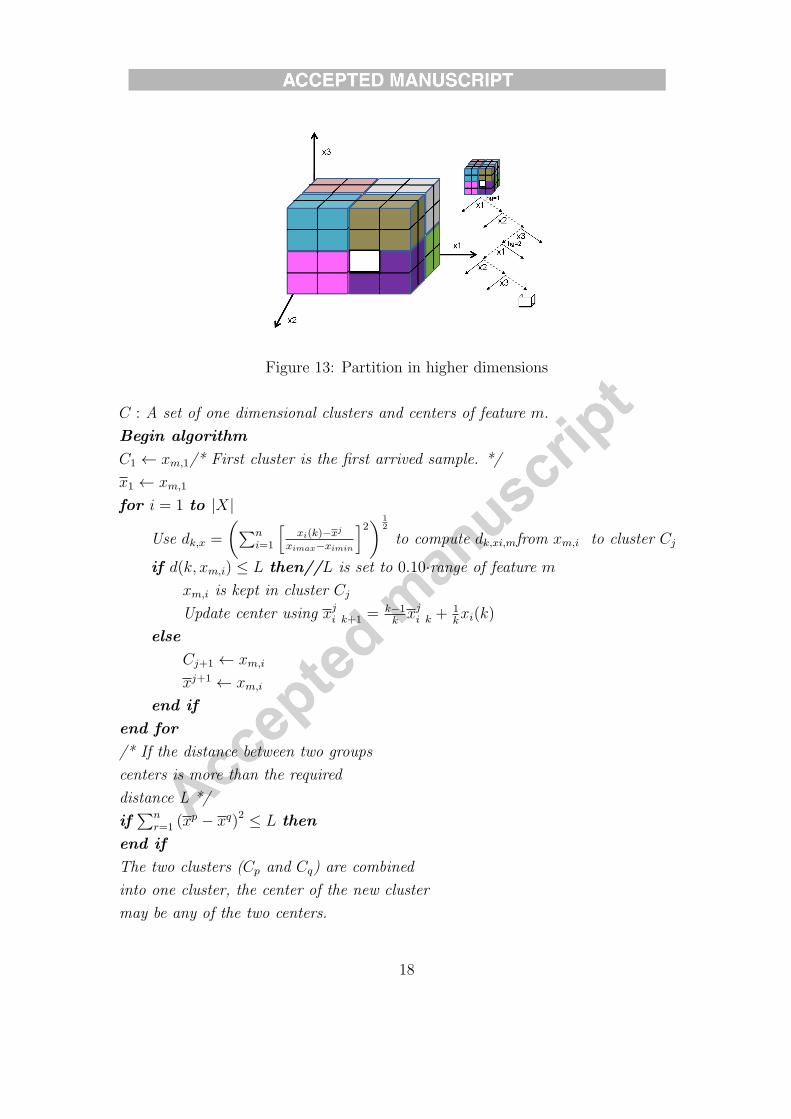
Figure 13: Partition in higher dimensions
C : A set of one dimensional clusters and centers of feature m.
Begin algorithm
C1 ← xm,1/* First cluster is the first arrived sample. */
x1 ← xm,1
for i = 1 to |X|
Use dk,x =
(∑ni=1
[xi(k)−xj
ximax−ximin
]2) 12
to compute dk,xi,mfrom xm,i to cluster Cj
if d(k, xm,i) ≤ L then//L is set to 0.10·range of feature m
xm,i is kept in cluster Cj
Update center using xji k+1 =
k−1kxji k +
1kxi(k)
else
Cj+1 ← xm,i
xj+1 ← xm,i
end if
end for
/* If the distance between two groups
centers is more than the required
distance L */
if∑n
r=1 (xp − xq)2 ≤ L then
end if
The two clusters (Cp and Cq) are combined
into one cluster, the center of the new cluster
may be any of the two centers.
18
end if
return C
End algorithm
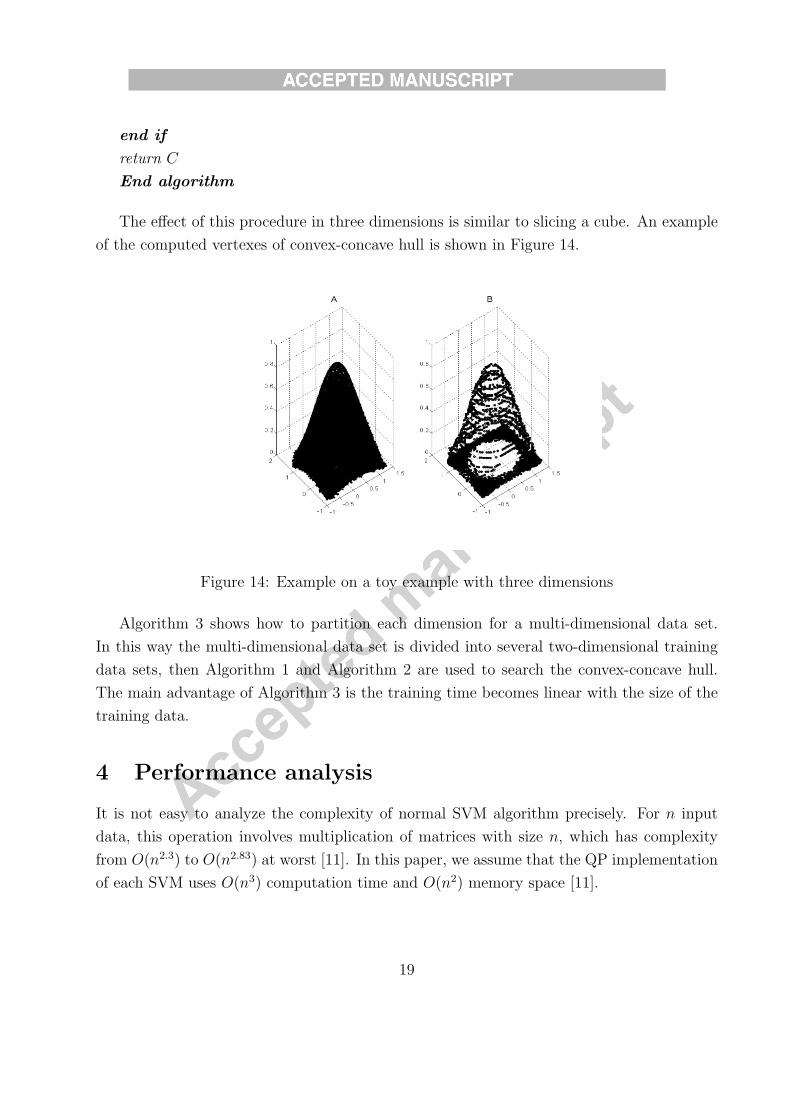
The effect of this procedure in three dimensions is similar to slicing a cube. An example
of the computed vertexes of convex-concave hull is shown in Figure 14.
Figure 14: Example on a toy example with three dimensions
Algorithm 3 shows how to partition each dimension for a multi-dimensional data set.
In this way the multi-dimensional data set is divided into several two-dimensional training
data sets, then Algorithm 1 and Algorithm 2 are used to search the convex-concave hull.
The main advantage of Algorithm 3 is the training time becomes linear with the size of the
training data.
4 Performance analysis
It is not easy to analyze the complexity of normal SVM algorithm precisely. For n input
data, this operation involves multiplication of matrices with size n, which has complexity
from O(n2.3) to O(n2.83) at worst [11]. In this paper, we assume that the QP implementation
of each SVM uses O(n3) computation time and O(n2) memory space [11].
19

4.1 Memory space
In the first step of our method, all examples in training set X are mapped into grid G by a
binary tree with the height hg (granularity). Considering the following facts:
• Each example has d dimensions and the data types are double (8 bytes),
• Each internal node in the binary tree occupies about 40 bytes (two references to the
child nodes and internal variables),
So the amount of memory to manage all examples in G is
23+hg (d+ 5)− 40 bytes
where hg is the height of the binary tree, d is the number of features in data set X.
This amount of memory is computed as follows: the maximum number of leaves in a
binary tree of height hg is given by 2hg , each leaf contains a vector of d features and each
feature is stored in 8 bytes, the amount of memory used by the leaves is
2hg · 8 · d = 2hg23 · d
It is well known that the number of internal nodes in a binary tree of height hg is given
by 2hg − 1. Because each internal node in the implemented binary tree uses about 40 bytes,
the amount of memory used for the internal nodes is
40 · (2hg − 1)
The total amount of memory used by the binary tree is composed of the leaves and the
internal nodes, i.e.,
(2hg23 · d) + 40 · (2hg − 1)
This can be simplified as 2hg·23·d+40·(2hg−1) = 2hg·23d+2hg·40−40 = 2hg·23·d+2hg·23·5−40.Grouping terms we obtain finally 2hg · 23(d+ 5)− 40 bytes.
This amount of memory is used when all leaves of the binary tree exist. In this case more
than one example is usually mapped into the same leaf of the tree. Reducing the amount
of memory originally required to allocate the training set X, i.e., 8 · |X| · d bytes. With |X|the size of training set, namely n.
The memory used by Algorithm 2 can be ignored, because they use a little memory space
compared with the binary tree.
20
4.2 Computation time
In order to analyze the computational cost of the proposed method, our method is separated
into:
• Create a grid G via a binary tree. The computing time for creating G is the example
inserting in a binary tree. It is O(n log2 n) with n = |X|.
• Detect the vertexes of the convex-concave hulls in partitions Yi by looking downward
tree from height ha down to height hb.
Algorithm 1 uses the partition Yi to obtain the vertexes of a convex hull. The cost is
O(|Yi| log2 |Yi|).
To simplify the analysis we consider a uniform distribution of examples, in this case the
size of Yi can be approximated as |X|2hb
. For Algorithm 2, the worst case occurs is that all
examples of Yi are considered as vertexes, usually Yi has a few elements. The computing
time is small compared with these few samples. In general case, Algorithm 2 searches a
small subset from Yi by the K-nearest neighbors method (KNN). The computing time of the
simple KNN is O(d|X|2). For our case it becomes O(d(
|X|2
22·(hb)
)).
• The total computation time in the pre-processing steps is
O(|X| log2 |X|) +O(|X|2hb
log2|X|2hb
) +O
(d
(|X|2
22·(hb)
))(15)
• SVM training uses the QPP solver. It takes O(n3) time and O(n2) space for X. On
the other hand, the number of vertexes of convex-concave hull is greater than the
vertexes of convex hull |B(X)| >> |VCH(H)|. However |B(X)| ≪ |X|, because not all
points are on boundary. The training time of using |B(X)| is lesser than using X , i.e.,
O(|B(X)|3) << O(|X|3)
5 Experiments
We used eight data sets to compare our algorithms with other methods. Four data sets are
available in UCI web site. The others are benchmark examples.
The data sets from UCI are Four class, Skin-no-skin Breast cancer and Haberman’s
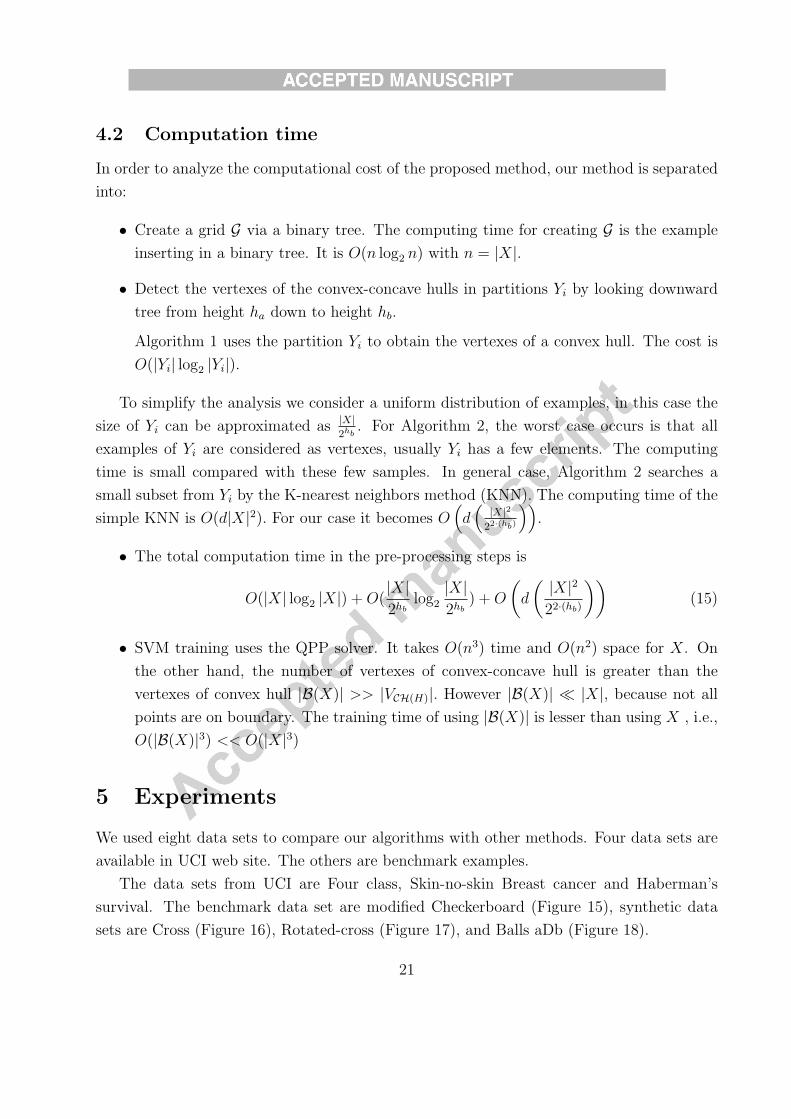
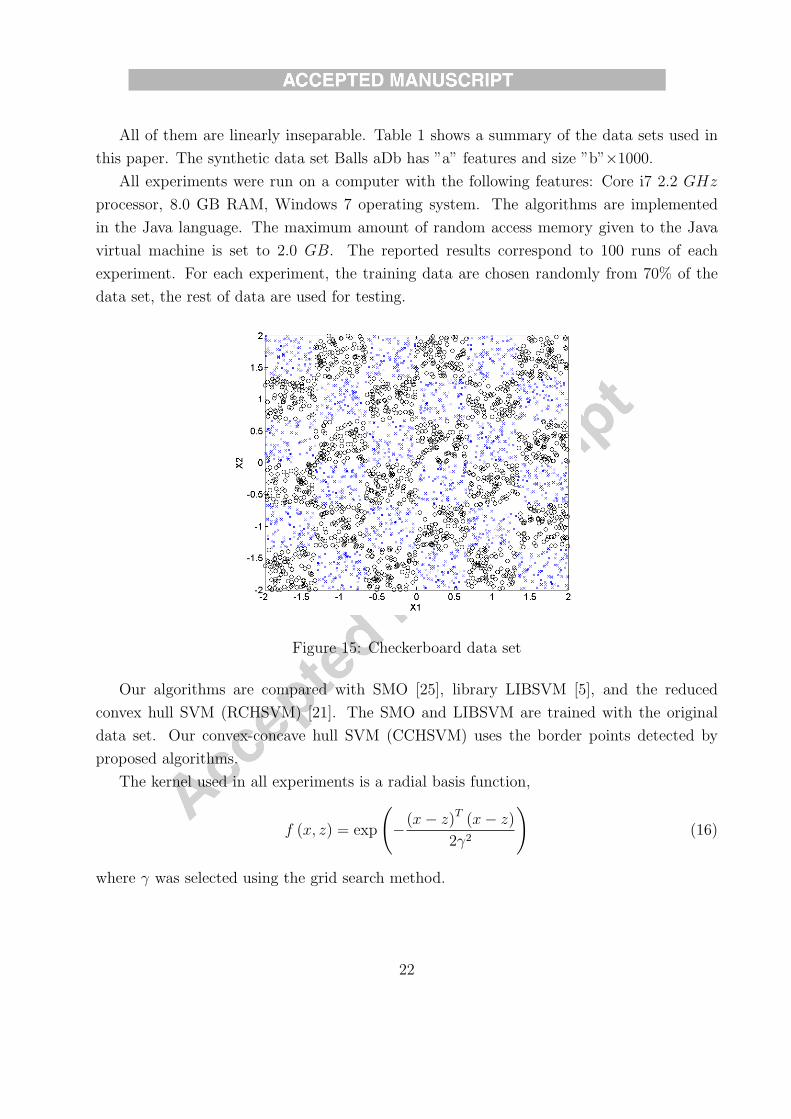
survival. The benchmark data set are modified Checkerboard (Figure 15), synthetic data
sets are Cross (Figure 16), Rotated-cross (Figure 17), and Balls aDb (Figure 18).
21
All of them are linearly inseparable. Table 1 shows a summary of the data sets used in
this paper. The synthetic data set Balls aDb has ”a” features and size ”b”×1000.All experiments were run on a computer with the following features: Core i7 2.2 GHz
processor, 8.0 GB RAM, Windows 7 operating system. The algorithms are implemented
in the Java language. The maximum amount of random access memory given to the Java
virtual machine is set to 2.0 GB. The reported results correspond to 100 runs of each
experiment. For each experiment, the training data are chosen randomly from 70% of the
data set, the rest of data are used for testing.
Figure 15: Checkerboard data set
Our algorithms are compared with SMO [25], library LIBSVM [5], and the reduced
convex hull SVM (RCHSVM) [21]. The SMO and LIBSVM are trained with the original
data set. Our convex-concave hull SVM (CCHSVM) uses the border points detected by
proposed algorithms.
The kernel used in all experiments is a radial basis function,
f (x, z) = exp
(−(x− z)T (x− z)
2γ2
)(16)
where γ was selected using the grid search method.
22
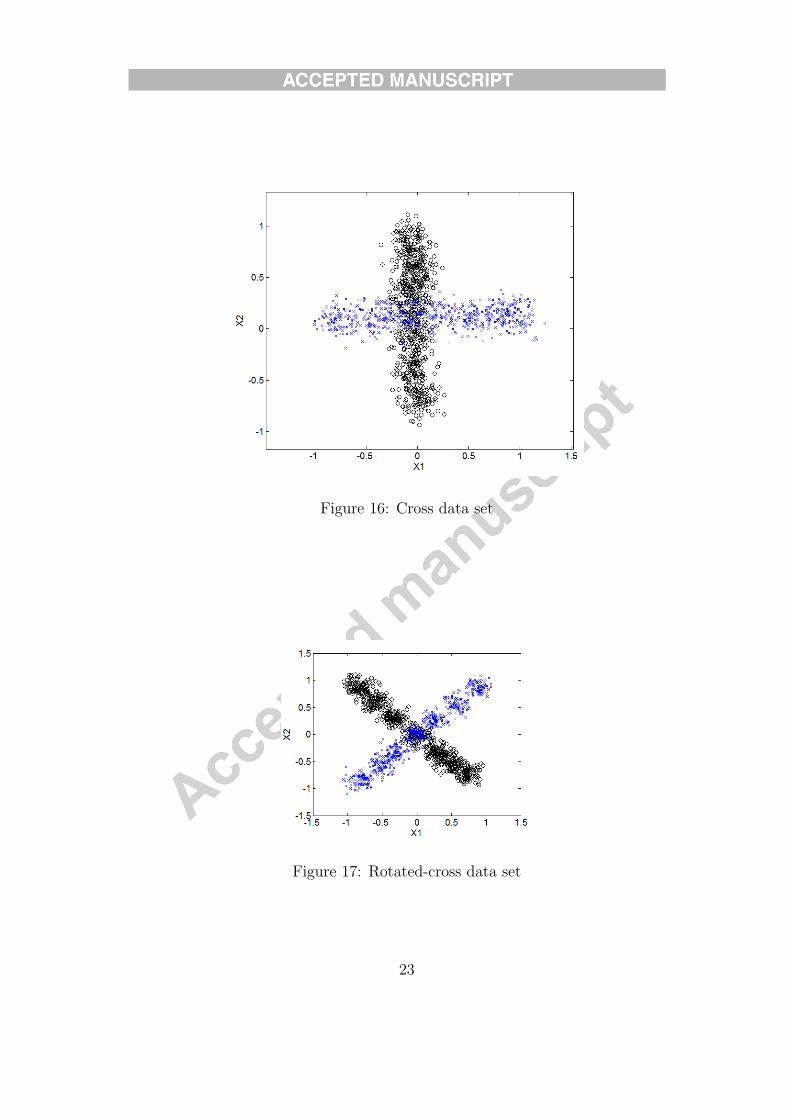
Figure 16: Cross data set
Figure 17: Rotated-cross data set
23
Figure 18: Balls data set
Table 1: Data sets used in the experiments
Data set Features Size yi = +1 yi = −1 classes
Four-class 2 862 307 555 2
Checkerboard50 2 50,000 13,000 12,000 2
Cross 2 90,000 50,000 40,000 2
Rotated-cross 2 90,000 50,000 40,000 2
Skin-no-Skin 3 245,057 50,859 194,198 2
Haberman’s Survival 3 306 225 81 2
Balls aDb a b b/2 b/2 2
Breast cancer 9 286 201 85 2
24
5.1 Experiment 1: Size of training set
In this experiment, we use the checkerboard data set [15] which is commonly used for eval-
uating SVM implementations. It is also useful to illustrate the scaling properties of our
algorithms.
We first exam how does the training data size affect the training time, and the classifi-
cation accuracy of our CCHSVM. We use 500, 1, 000, 2000, 5000, 10000, 50000 and 100000
examples to train CCHSVM and LibSVM. The comparison results of 100 runs of experi-
ments are shown in Table 2, here the columns Avg Acc and Avg training are the averages
of accuracy and training times respectively, the column stdDev is the standard deviation of
accuracy. In this experiment, the values γ = 0.9 and C = 1.0 which are chosen using the
grid search method. The parameters of the CCHSVM algorithm defined in section III are
K = 50, hg = 9, ha = 4 and hb = 8 which are also selected via a grid method.
We can see that our CCHSVM has less training time than LibSVM when the size of
training set is large, more than 5000. For small data sets, LibSVM is better than our
method. The classification accuracy of our method is slightly lesser than LibSVM. The size
of training set is important when the set contains thousands of examples. The pre-processing
reduces the size of training set.
When the data size in increased, the training time is increased with LibSVM. While our
method only increases a little. Although the classification accuracy cannot be improved
significantly when data size is very large, it does not get worse. The testing accuracy is still
acceptable.
5.2 Experiment 2: Parameters
The CCHSVM method has four parameters: hg, ha, hb and K. The hg controls the granu-
larity of the grid, i.e., the height of the binary tree. The parameter ha is used to create the
partitions in higher dimensions. The binary tree is traverse down to high hb. The parameter
K controls the number of neighbors to detect border points close to edges of convex hull.
We used the synthetic Balls3D40 data set (40, 000 examples) to analyze the effect of
parameters of algorithm. The LibSVM method was used as a reference. Table 3 shows the
results. In this experiment, γ = 1.9 and C = 2.5 which are from the grid method.
The most important effect of parameter K is to reduce the data size. K does not
contribute much on the classification accuracy and running time. The parameters hg and ha
25
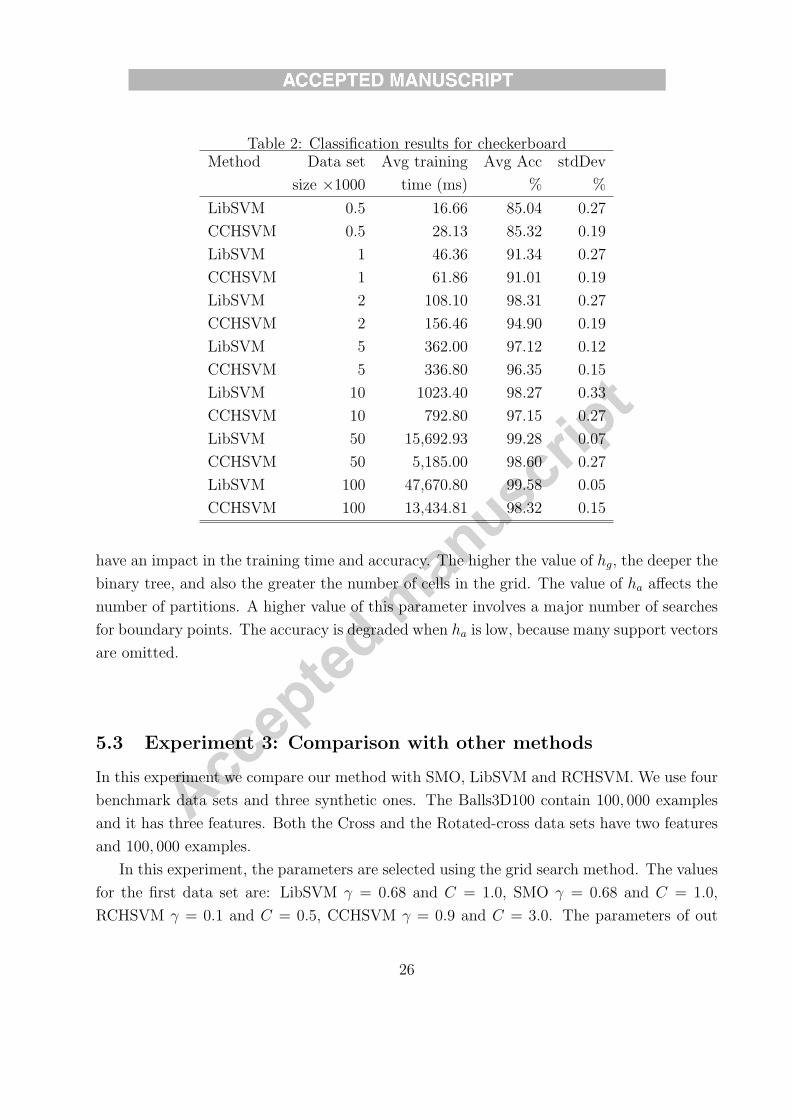
Table 2: Classification results for checkerboardMethod Data set Avg training Avg Acc stdDev
size ×1000 time (ms) % %
LibSVM 0.5 16.66 85.04 0.27
CCHSVM 0.5 28.13 85.32 0.19
LibSVM 1 46.36 91.34 0.27
CCHSVM 1 61.86 91.01 0.19
LibSVM 2 108.10 98.31 0.27
CCHSVM 2 156.46 94.90 0.19
LibSVM 5 362.00 97.12 0.12
CCHSVM 5 336.80 96.35 0.15
LibSVM 10 1023.40 98.27 0.33
CCHSVM 10 792.80 97.15 0.27
LibSVM 50 15,692.93 99.28 0.07
CCHSVM 50 5,185.00 98.60 0.27
LibSVM 100 47,670.80 99.58 0.05
CCHSVM 100 13,434.81 98.32 0.15
have an impact in the training time and accuracy. The higher the value of hg, the deeper the
binary tree, and also the greater the number of cells in the grid. The value of ha affects the
number of partitions. A higher value of this parameter involves a major number of searches
for boundary points. The accuracy is degraded when ha is low, because many support vectors
are omitted.
5.3 Experiment 3: Comparison with other methods
In this experiment we compare our method with SMO, LibSVM and RCHSVM. We use four
benchmark data sets and three synthetic ones. The Balls3D100 contain 100, 000 examples
and it has three features. Both the Cross and the Rotated-cross data sets have two features
and 100, 000 examples.
In this experiment, the parameters are selected using the grid search method. The values
for the first data set are: LibSVM γ = 0.68 and C = 1.0, SMO γ = 0.68 and C = 1.0,
RCHSVM γ = 0.1 and C = 0.5, CCHSVM γ = 0.9 and C = 3.0. The parameters of out
26
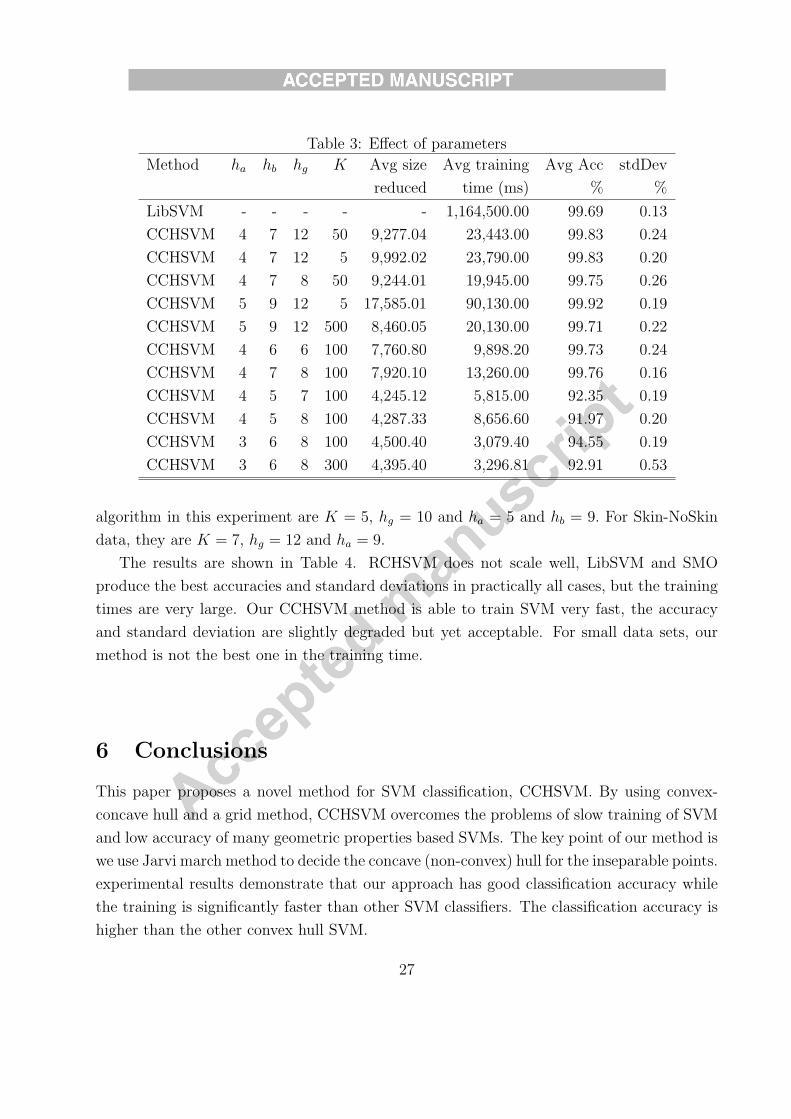
Table 3: Effect of parameters
Method ha hb hg K Avg size Avg training Avg Acc stdDev
reduced time (ms) % %
LibSVM - - - - - 1,164,500.00 99.69 0.13
CCHSVM 4 7 12 50 9,277.04 23,443.00 99.83 0.24
CCHSVM 4 7 12 5 9,992.02 23,790.00 99.83 0.20
CCHSVM 4 7 8 50 9,244.01 19,945.00 99.75 0.26
CCHSVM 5 9 12 5 17,585.01 90,130.00 99.92 0.19
CCHSVM 5 9 12 500 8,460.05 20,130.00 99.71 0.22
CCHSVM 4 6 6 100 7,760.80 9,898.20 99.73 0.24
CCHSVM 4 7 8 100 7,920.10 13,260.00 99.76 0.16
CCHSVM 4 5 7 100 4,245.12 5,815.00 92.35 0.19
CCHSVM 4 5 8 100 4,287.33 8,656.60 91.97 0.20
CCHSVM 3 6 8 100 4,500.40 3,079.40 94.55 0.19
CCHSVM 3 6 8 300 4,395.40 3,296.81 92.91 0.53
algorithm in this experiment are K = 5, hg = 10 and ha = 5 and hb = 9. For Skin-NoSkin
data, they are K = 7, hg = 12 and ha = 9.
The results are shown in Table 4. RCHSVM does not scale well, LibSVM and SMO
produce the best accuracies and standard deviations in practically all cases, but the training
times are very large. Our CCHSVM method is able to train SVM very fast, the accuracy
and standard deviation are slightly degraded but yet acceptable. For small data sets, our
method is not the best one in the training time.
6 Conclusions
This paper proposes a novel method for SVM classification, CCHSVM. By using convex-
concave hull and a grid method, CCHSVM overcomes the problems of slow training of SVM
and low accuracy of many geometric properties based SVMs. The key point of our method is
we use Jarvi march method to decide the concave (non-convex) hull for the inseparable points.
experimental results demonstrate that our approach has good classification accuracy while
the training is significantly faster than other SVM classifiers. The classification accuracy is
higher than the other convex hull SVM.
27
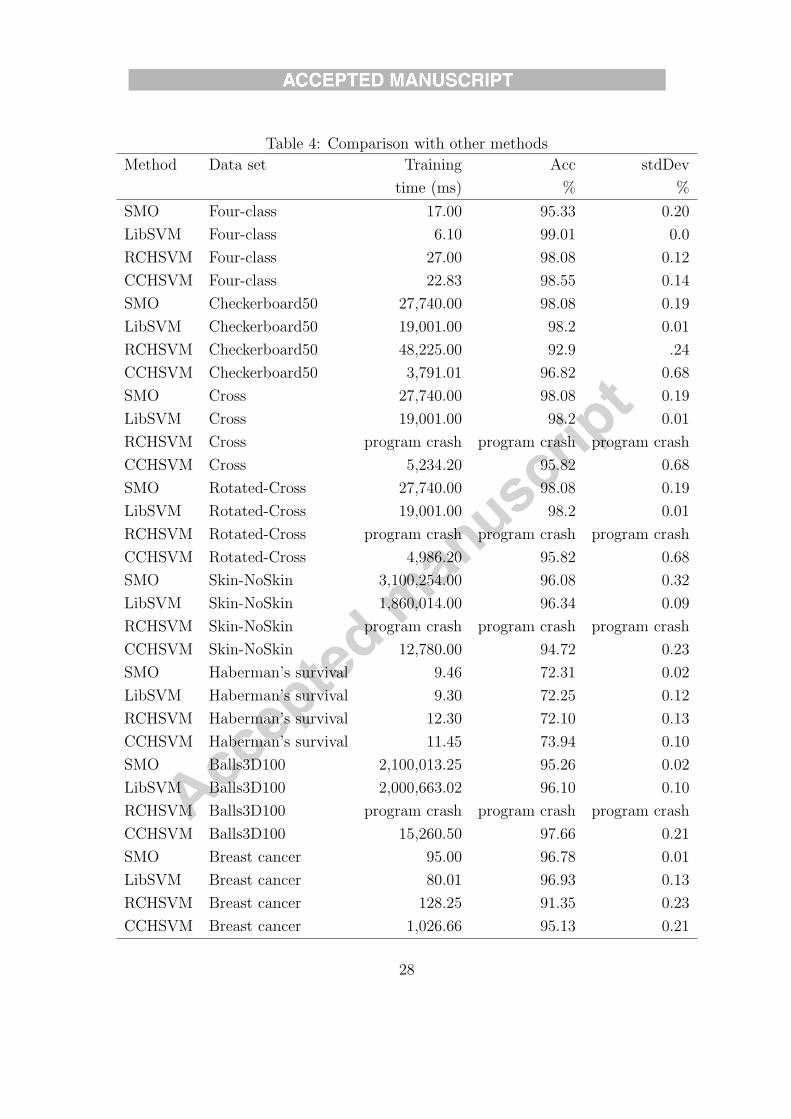
Table 4: Comparison with other methods
Method Data set Training Acc stdDev
time (ms) % %
SMO Four-class 17.00 95.33 0.20
LibSVM Four-class 6.10 99.01 0.0
RCHSVM Four-class 27.00 98.08 0.12
CCHSVM Four-class 22.83 98.55 0.14
SMO Checkerboard50 27,740.00 98.08 0.19
LibSVM Checkerboard50 19,001.00 98.2 0.01
RCHSVM Checkerboard50 48,225.00 92.9 .24
CCHSVM Checkerboard50 3,791.01 96.82 0.68
SMO Cross 27,740.00 98.08 0.19
LibSVM Cross 19,001.00 98.2 0.01
RCHSVM Cross program crash program crash program crash
CCHSVM Cross 5,234.20 95.82 0.68
SMO Rotated-Cross 27,740.00 98.08 0.19
LibSVM Rotated-Cross 19,001.00 98.2 0.01
RCHSVM Rotated-Cross program crash program crash program crash
CCHSVM Rotated-Cross 4,986.20 95.82 0.68
SMO Skin-NoSkin 3,100,254.00 96.08 0.32
LibSVM Skin-NoSkin 1,860,014.00 96.34 0.09
RCHSVM Skin-NoSkin program crash program crash program crash
CCHSVM Skin-NoSkin 12,780.00 94.72 0.23
SMO Haberman’s survival 9.46 72.31 0.02
LibSVM Haberman’s survival 9.30 72.25 0.12
RCHSVM Haberman’s survival 12.30 72.10 0.13
CCHSVM Haberman’s survival 11.45 73.94 0.10
SMO Balls3D100 2,100,013.25 95.26 0.02
LibSVM Balls3D100 2,000,663.02 96.10 0.10
RCHSVM Balls3D100 program crash program crash program crash
CCHSVM Balls3D100 15,260.50 97.66 0.21
SMO Breast cancer 95.00 96.78 0.01
LibSVM Breast cancer 80.01 96.93 0.13
RCHSVM Breast cancer 128.25 91.35 0.23
CCHSVM Breast cancer 1,026.66 95.13 0.21
28
Experimental results demonstrate that our approach has good classification accuracy
while the training is significantly faster than other SVM classifiers. The classification accu-
racy is higher than the other geometric methods such as reduced convex hull.
The training time of CCHSVM have been significantly reduced. For small data sets and
high dimension data, the accuracy of CCHSVM is maintained slightly lower than the classical
SVM classifiers which use the whole data set. However, in the case of larger data sets, the
classification accuracy are almost the same or even better than the other SVMs, because we
do not use soft margin method to deal with the misleading points, we use concave hull to
solve this problem.
References
[1] K.P. Bennett , E.J. Bredensteiner, Geometry in Learning, Geometry at Work, C. Gorini
editors, Mathematical Association of America, 132-145, 2000
[2] K.P. Bennett , E.J. Bredensteiner, Duality and Geometry in SVM Classifiers, 17th
International Conference on Machine Learning, San Francisco, CA, 2000
[3] M.Berg, O.Cheong, M.Kreveld, M.Overmars, Computational Geometry: Algorithms and
Applications, Springer-Verlag, 2008
[4] J.Cervantes, X.Li, W.Yu, K.Li, Support vector machine classification for large data sets
via minimum enclosing ball clustering, Neurocomputing, Vol.71, 611-619, 2008
[5] C-C.Chang and C-J.Lin, LIBSVM: A library for support vector machines,
http://www.csie.ntu.edu.tw/˜cjlin/libsvm, 2001.
[6] D.J. Crisp, C.J.C. Burges, A Geometric Interpretation of υ-SVM Classifiers, NIPS,
Vol.12, 244-250, 2000
[7] R.Collobert, F.Sinz, J.Weston, L.Bottou, Trading convexity for scalability, 23rd Inter-
national Conference on Machine Learning, 201-208, Pittsburgh, USA; 2006
[8] R.Collobert, S.Bengio, SVMTorch: Support vector machines for large regression prob-
lems, Journal of Machine Learning Research, Vol.1, 143-160, 2001.
[9] W.Eddy, A New Convex Hull Algorithm for Planar Sets, ACM Transactions on Math-
ematical Software Vol.3, No.4, 398–403, 1977
29
[10] V.Franc, V.Hlavac, An iterative algorithm learning the maximal margin classifier, Pat-
tern Recognition, Vol.36, 1985 –1996, 2003
[11] B.V.Gnedenko, Y.K.Belyayev, and A.D.Solovyev, Mathematical Methods of Reliability
Theory, NewYork: Academic Press, 1969
[12] E. G. Gilbert, An iterative procedure for computing the minimum of a quadratic form
on a convex set, SIAM J. on Control and Optimization, Vol.4, No.1, 61-79, 1966
[13] R.L.Graham, An Efficient Algorithm for Dutennining the Convex Hull of a Finite PIanar
Set, Information Processing Letters, Vol.1, 132-133, 1972
[14] G.Guo, J.-S.Zhang, Reducing examples to accelerate support vector regression, Pattern
Recognition Letters, Vol.28, 2173-2183, 2007
[15] T. K. Ho and E. M. Kleinberg. Checkerboard dataset, http://www.cs.wisc.edu/, 1996.
[16] C.-W.Hsu, C.-C.Chang, C.-J.Lin, A Practical Guide to Support Vector Classification,
Bioinformatics, Volume: 1, Issue: 1, 1-16, 2010.
[17] R.A.Jarvis, On the identification of the convex hull of a finite set of points in the plane,
Information Processing Letters, Vol.2, 18-21, 1973
[18] S. S. Keerthi, S. K. Shevade, C. Bhattacharyya, and K. R. K. Murthy, A Fast Iter-
ative Nearest Point Algorithm for Support Vector Machine Classifier Design, IEEE
Transactions on Neural Networks, Vol. 11, No.12, 124-137, 2001.
[19] S.S.Keerthi, E.G.Gilbert, Convergence of a Generalized SMO Algorithm for SVM Clas-
sifier Design. Machine Learning, 46, 351–360, 2002
[20] Y.Li, Selecting training points for one-class support vector machines, Pattern Recogni-
tion Letters, Vol.32, 1517-1522, 2011.
[21] M.E.Mavroforakis, S.Theodoridis, A Geometric Approach to Support Vector Machine
(SVM) Classification, IEEE Trans. Neural Networks, vol.17, no.3, pp.671-682, 2006. S
[22] B. F. Mitchell, V. F. Dem’yanov, and V. N. Malozemov, Finding the point of a polyhe-
dron closest to the origin, Vestinik Leningrad. Gos.Univ., Vol. 13, pp. 38-45, 1971
[23] M.Kallay, The Complexity of Incremental Convex Hull Algorithms, Information Pro-
cessing Letters, Vol.19, No.4, 197-212, 1984.
30
[24] N.Cristianini, J.Shawe-Taylor , An Introduction to Support Vector Machines and Other
Kernel-based Learning Methods , Cambridge University Press, 2000.
[25] J.Platt, Fast Training of support vector machine using sequential minimal optimization,
Advances in Kernel Methods: Support Vector Machine, MIT Press, Cambridge, MA,
1998.
[26] C.Pizzuti, D.Talia, P-Auto Class: Scalable Parallel Clustering for Mining Large Data
Sets, IEEE Trans. Knowledge and Data Eng., vol.15, no.3, pp.629-641, 2003.
[27] F.P.Preparata, S.J. Hong. Convex Hulls of Finite Sets of Points in Two and Three
Dimensions, Communications of the ACM , vol. 20, no. 2, pp. 87–93, 1977.
[28] M.I. Schlesinger, V.G. Kalmykov, A.A. Suchorukov, Sravnitelnyj, Comparative anal-
ysis of algorithms synthesising linear decision rule for analysis of complex hypotheses,
Automatika, Vol.1, 3-9, 1981.
[29] I.W. Tsang, J.T. Kwok, P.M.Cheung, Core Vector Machines: Fast SVM Training on
Very Large Data Sets, Journal of Machine Learning Research, Vol. 6, 363-392, 2005
[30] V.Vapnik, The Nature of Statistical Learning Theory, Springer, New York, 1995.
[31] C.Xia, W.Hsu, M.L.Lee, B.C.Ooi, BORDER: Efficient Computation of Boundary
Points, IEEE Trans. Knowledge and Data Eng., vol.18, no.3, pp.289-303, 2006.
[32] A. L. Yuille, A.Rangarajan, The Concave-Convex Procedure, Neural Computation, Vol.
15, No. 4, Pages 915-936, 2003
[33] H.Yu , J.Yang and J.Han , Classifying Large Data Sets Using SVMs with Hierarchical
Clusters, Proc. of the 9th ACM SIGKDD 2003, Washington, DC, USA, 2003.
[34] A.Moreira, M.Y.Santos, Concave Hull: A K-Nearest Neighbours Approach for the Com-
putation of the Region Occupied by a Set of Points, GRAPP (GM/R), Pages 61–68,
2007
[35] W.Yu, X.Li, On-line fuzzy modeling via clustering and support vector machines, Infor-
mation Sciences, Vol.178, 4264-4279, 2008.
31