constant and switching gains in semi-active damping of vibrating structures
TRANSCRIPT

International Journal of ControlVol. 85, No. 12, December 2012, 1886–1897
Constant and switching gains in semi-active damping of vibrating structures
Franco Blanchinia, Daniele Casagrandeb*, Paolo Gardoniob and Stefano Mianib
aDepartment of Mathematics and Computer Science, University of Udine, Via delle Scienze,208-33100 Udine, Italy; bDepartment of Electrical, Managerial and Mechanical Engineering,
University of Udine, Via delle Scienze, 208-33100 Udine, Italy
(Received 2 April 2012; final version received 7 July 2012)
We consider the problem of optimal control of vibrating structures and we analyse the solution provided bycollocated semiactive decentralised damping devices. We mainly consider the H1 criterion and we first study thecase of constant dampers, showing that in the case of a single damper the performance is a quasi-convex functionof friction so there is a single local minimum which is a global one. The case of multiple dampers does not exhibitthis feature and time-expensive computations may be required. Secondly, we consider the case in which dampersmay be tuned on line, and in particular the case in which they work in a switching on–off mode. We propose astate-switching feedback control strategy, which outperforms the constant damping approach with the optimalstatic gain performance as an upper bound. For large distributed flexible structures, state feedback is unrealisticand so we propose a stochastic strategy based on a Markov-jump criterion for which the transition probabilityare not assigned but designed to optimise average performance, with guaranteed asymptotic stability. Finally, weshow that the same result provided for the H1 case holds for the H2 and the l1 criteria.
Keywords: semi-active control; switching control; optimal control
1. Introduction and preliminaries
The control of vibration and sound radiation ofdistributed flexible structures with active systems is achallenging problem. Complex multichannel feedbackcontrollers are often used; however, they are difficult torealise in practice (Clark, Saunders, and Gibbs 1978;Preumont 2002). During the past decade, research hasshifted to much simpler solutions based on decentra-lised velocity feedback, which generate active dampingon the structure. The interest for this control config-uration is twofold. First, the decentralised controlloops are bound to be unconditionally stable, providedthe sensor and actuator pairs are dual and collocated(Balas 1979). Secondly, when considering broadbandrandom disturbances on plate structures, as the controlgains of the decentralised control units are increasedfrom zero, both the vibrational response and soundradiation tend to decrease up to a certain gain beyondwhich they progressively go back to the valuescorresponding to a feedback gain equal to zero(Elliott, Gardonio, Sors, and Brennan 2002;Gardonio, Miani, Blanchini, Casagrande, andElliott 2012). Simulations indicate that there is anoptimal gain for the velocity feedback such thatboth vibrational response and sound radiation areminimised. Thus decentralised velocity feedbackcontrol offers a stable and simple control strategy to
reduce broad-band random disturbances in distributed
flexible structures.Many structural vibration control applications can
be interpreted as semi-active control scenarios (Spencer
and Nagarajaiah 2003). In particular, among other
techniques, the well-known H1 approach (Yamashita,
Fujimori, Hayakawa, and Kimura 1994; Du, Sze, and
Lam 2005; Karimi, Zapateiro, and Luo 2009;
Prabakar, Sujatha, and Narayanan 2009; Fallah,
Bhat, and Xie 2010; Karimi, Zapateiro, and Luo
2010; Li, Gao, and Liu 2011; Sun, Gao, and Kaynak
2011) and the model predictive control (Canale,
Milanese, and Novara 2006) have been successfully
applied. The reader is referred to Cavallo, De Maria,
and Natale (2010) for a detailed survey. As far as the
practical realisation of the control is concerned, several
configurations have been investigated experimentally,
which employ different types of sensor-actuator pairs
for the implementation of the decentralised velocity
feedback loops, such as piezoelectric transducers
(Hagood and von Flotow 1991; Dosch, Inman, and
Garcia 1992; Cole and Clark 1994; Petitjean and
Legrain 1996; Petitjean, Legrain, Simon, and Pauzin
2002; Bianchi, Gardonio, and Elliott 2004; Gardonio,
Aoki, and Elliott 2010) or electromagnetic transducers
(Paulitsch, Gardonio, and Elliott 2006; Alujevic,
Gardonio, and Frampton 2011; Rohlfing, Gardonio,
*Corresponding author. Email: [email protected]
ISSN 0020–7179 print/ISSN 1366–5820 online
� 2012 Taylor & Francis
http://dx.doi.org/10.1080/00207179.2012.710915
http://www.tandfonline.com
and Thompson 2011). Of particular interest is the ideaof implementing switching controllers, which enhancethe damping action of passive shunts (Ji, Qiu, Xia, andGuyomar 2011). In general, these studies are focusedon two aspects for the given pair of sensor-actuatortransducers: first, how to set the controller in order toget a negative feedback that would produce a dampingeffect on the structure in the audio frequency range ofinterest; second, how to ensure the feedback loops arestable for the control gains that would minimise theflexural vibration and sound radiation of the panelstructure.
In parallel to the work on active control of vibrationand sound radiation by distributed flexible structures,the idea of using decentralised velocity feedback controlunits has also been explored for vibration isolationproblems, i.e. to reduce ground disturbances transmis-sion to delicate equipment (normally measurementsetups or precise fabrication devices) or to vehicles(cars, trains, etc.) and to control the disturbancetransmission by running equipment (reciprocatingengines or compressors, electric motors, flying wheels,etc.) to the supporting structure (Gordon 1995; Fuller,Elliott, and Nelson 1996; Preumont 2002). Normally,both types of problems are tackled by using compliantmounts. However, very soft mounts are required toensure good isolation effects starting from low seismicfrequencies but this requirement cannot be easilysatisfied as the mounts have also to be stiff enough towithstand the static load exerted by the suspendedsystem. With reference to this problem, decentralisedvelocity feedback (Kim, Elliott, and Brennan 2001) and‘sky-hook’ active damping (Karnopp 1995) have beeninvestigated. In both cases, the feedback systems aremounted in parallel with the passive mount. In case ofnarrow band disturbances, inertial actuators thatoperate at resonance frequency have been used(Elliott, Serrand, and Gardonio 2001). Alternatively,semi-active systems have been developed where thedamping of the suspension system is switched from lowto high values in such a way as to synthesise a sky-hookdamping effect, which more efficiently dissipates energyand thus reduces vibration transmission (Karnopp,Crosby, and Harwood 1974; Fischer and Isermann2003). In particular, the use of magneto-rheologicalfluid dampers has been extensively investigated (Jean,Ohayon, Mace, and Gardonio 2006).
In parallel to the practical development of thefeedback loops to which the above-mentioned worksrefer, there has been a lot of theoretical work on theformulation of optimal output feedback control laws.For instance, as summarised in Mkula and Toivonen’s(1987) survey, a number of studies have beenproposed for the optimal tuning of decentralisedvelocity feedback control loops with constant gain
(e.g. Toivonen 1985; Skogestad and Postlethwaite1996). In this article we consider the specific problemof a weakly damped structure controlled by collocateddampers, of which only the friction coefficient can betuned. In particular, we focus on the optimal controlproblem related to the minimisation of the H1 normof a relevant transfer function. The case of constanttunable dampers with the tuning performed off-line isstudied first. Then the case in which the dampingvalues can be switched on line in an on–off mode isanalysed.
A state-switching can introduce a considerableadvantage in semi-active control for two reasons.First, from a technological point of view, switchingstrategies are suitable for easy on-line retuning and canbe implemented at a reasonable cost. Second, as shownbelow, they outperform constant strategies. Third, theimplementation of a constant damper can be doneeither actively (a proportional control) at a high costand with stability problem due to phase lag, orpassively. In this second case, tuning the dampingcoefficient is conceptually simple but practicallydifficult, because friction devices are subject to broadvariations due to external factors such as temperature.Conversely switching allows for a ‘virtually perfect’tuning of the damping factor.
The main results of the paper are detailed below.
. In the case of a SISO system with a singledamper in which either a displacement or avelocity is taken as output, we show that theminimum of theH1 norm is unique. Precisely,given a performance level �, we can providethe interval of all gains which ensure such aperformance level. The global minimum isreadily achieved by bisection. However, in thecase of multiple dampers, non-convex optimi-sation is necessary.
. In the case in which a semi-active approach isallowed, so that the damping coefficient canbe changed on-line, we show that there exists aswitching strategy that outperforms staticones, provided that the state feedback ispossible. The switching strategy is achievedby considering the storage function associatedwith the constant gain.
. If state feedback is not applicable, then weshow how to use a probabilistic approach,with guaranteed stability. The resultingclosed-loop system is a Markov jump linearsystems whose transition properties are opti-mised by means of parametric matrixinequalities.
. We briefly discuss the case of H2-norm andl1-norm, showing that one can obtain
International Journal of Control 1887

analogous results to those that hold in the caseof the H1-norm.
Preliminary results on the problem considered in thispaper are found in Blanchini, Casagrande, Gardonio,and Miani (2011). Furthermore, the problem is relatedto the consistency for which very recent results areprovided in Geromel, Deaecto, and Daafouz (2011).
2. Problem setup
Consider a mechanical vibrating system modelled by
M €qðtÞ ¼ � �KqðtÞ þ �B2uðtÞ þ �E2wðtÞ,
yðtÞ ¼ C2 _qðtÞ,
zðtÞ ¼ H1qðtÞ þH2 _qðtÞ,
8><>: ð1Þ
where y2 IRp is the output velocities vector, M and �Kare the mass and stiffness positive definite matrices,�B2 and �E2 are the control and the primary excitationmatrices, u2 IRp and w are the control and primaryexcitation (i.e. noise) inputs, z is the performanceoutput, H1 and H2 are constant matrices. The statevariable are casted in the Lagrangian coordinate vectorq2 IRm and C2 is the control velocities matrix.
We consider the case of a negative linear feedback,namely the case of a linear damper of the form
uðtÞ ¼ �GyðtÞ, ð2Þ
in which G¼ diag{g} is a p� p diagonal matrixwith positive entries gi2 IR representing the frictioncoefficients of the damper (g ¼ ð g1, . . . , gpÞ
>2 IR
pþ is
the vector of the non-negative diagonal entries).We will work under the following assumption.
Assumption 2.1: Denoting by B2i the ith column of �B2
and by C2i the i-th row of C2 matrix B2iC2i þ C>2iB>2i is
positive semidefinite.
Remark 2.2: The previous assumption implies thatB2i is aligned with C>2i. Note that in most cases, forcollocated dampers we have simply that C2 ¼ �B>2 ,which ensures that Assumption 2.1 is satisfied. In turn,the assumption assures that �B2C2 þ C>2
�B>2 is positivesemidefinite.
Assumption 2.3: The system is reachable from anyinput channel ui and observable from any output yi.
Before dealing with damping optimisation, wepresent a result concerning the stability of the closed-loop system.
Proposition 2.4: Under the previous assumptions,system (2) is asymptotically stable for any choicegi� 0 such that at least one parameter is strictlypositive gi4 0.
Conversely, Assumption 2.3 means that the dam-
pers are not misplaced, for instance in a node of the
vibrating structure.By introducing the variables x1¼ q and x2 ¼ _q and
K ¼ �M�1 �K, E2 ¼ �M�1 �E2 and B2 ¼ �M�1 �B2 we obtain
the state space representation
_x1
_x2
� �¼
0 I
�K 0
� �x1
x2
� �þ
0
E2
� �wþ
0
B2
� �u, ð3Þ
z ¼ H1 H2
� � x1
x2
� �, ð4Þ
y ¼ 0 C2
� � x1
x2
� �: ð5Þ
The closed loop system becomes
_xðtÞ ¼ Að gÞxðtÞ þ EwðtÞ
zðtÞ ¼ HxðtÞð6Þ
where
A¼0 I
�K �B2GC2
� �, E¼
0
E2
� �, H¼ H1 H2ð Þ:
The problem considered in this article is how to
minimise the effect of the input w on the output z by
tuning g. The effect can be measured by using any of
the following performance indices, defined for x(0)¼ 0.
. Energy-to-energy gain:
J1 ¼ supR 10kwk22ðtÞdt�1
Z 10
kzðtÞk22dt:
where kwk2¼wTw, is the Euclidean norm.. Impulse response energy:
J2 ¼
Z 10
kzðtÞDk22dt,
where zD(t) is the impulse response of
system (6).. Peak-to-peak amplification:
J1 ¼ supkwð�Þk1�1
kzðtÞk1, ð7Þ
where k � k1, is the infinity norm:
kwð�Þk1 ¼ supt�0
max jwij:
We develop in particular the first criterion, since
the other two lead essentially to very similar results.
1888 F. Blanchini et al.

3. H1 optimisation
3.1 The SISO case with a single damper
Consider a system of masses and springs and a single
damper as the one depicted in Figure 1 and suppose
that the value of the damping coefficient g has to be
tuned in order to minimise the effect of the motion of
one of the masses on the motion of another mass,
namely the effect of an input w on an output z.
Denoting by F(s, g) the (g-dependent) closed-loop
transfer function from the input w to the output z,
assuming g constant, we can write the performance
index as
J1ð gÞ ¼ sup!�0jFð j!, gÞj: ð8Þ
The next theorem shows that for displacement or
velocity output the function has no multiple local
minima.
Theorem 3.1: If in (1) either H1¼ 0 or H2¼ 0, then J1does not have local minima which are not global. œ
Proof: We prove the theorem in the case H2¼ 0. The
case H1¼ 0 is identical.Assuming that H2¼ 0 the transfer function of
system (3)–(5) is of the form
Fðs, gÞ ¼�ðs2Þ þ gs�ðs2Þ
�ðs2Þ þ gs�ðs2Þ, ð9Þ
where �, �, � and � are even polynomials1 and
�(s)þ gs�(s) is Hurwitz for any positive g. Indeed,
the closed-loop system with u¼� gy in the input–out-
put representation can be written as
zðsÞ ¼ sH1 s2Iþ Kþ sgB2C2
� �1E2wðsÞ, ð10Þ
where z(s) and w(s) are the Laplace transforms of z(t)
and w(t), respectively, and I is the identity matrix.
Assumption 2.3 implies that B2C2 has rank one,
therefore
det s2Iþ Kþ sgB2C2
� is a polynomial function of s2 and an affine function of
�¼ sg. Similarly, the determinant of any sub-matrix of
s2IþKþ �B2C2 is an affine function of �. Then each
entry of
s2Iþ Kþ �B2C2
� �1is a bilinear function (the ratio of two affine functions)
of �¼ sg, precisely it has the form
�ijðs2Þ þ ��ijðs
2Þ
�ðs2Þ þ ��ðs2Þ:
Since all these functions have a common (Hurwitz in
view of Proposition 2.4) denominator,
Fðs, gÞ ¼ H1 s2Iþ Kþ sgB2C2
� �1E2
is of the required form.Now, let �4 0 be an arbitrary value. Setting
�¼ g2, the inequality jF(j!, g)j �� for all ! is
equivalent to
�ð�!2Þ2þ �!2�ð�!2Þ
2� �2 �ð�!2Þ
2þ �!2�ð�!2Þ
2�
,
that can be rewritten as
!2�ð�!2Þ2��2!2�ð�!2Þ
2�
�� �2�ð�!2Þ2��ð�!2Þ
2�
:
ð11Þ
The set of positive values �4 0 which satisfy the
previous inequality is a half-bounded interval. The
admissible set for � is the intersection of all such half-
bounded intervals, which is a (possibly empty) interval:
�ð�Þ ¼ f�j ð11Þ is verified for all ! � 0g
In other words, J1 is a quasi-convex function,2
and there cannot exist local minima which are
not global. œ
The case in which H1 and H2 are both different
from 0 remains open and it is not clear if multiple local
minima are possible.
3.2 Multiple dampers cases
We conclude the section analysing the case of multiple
(different) dampers. Since the aim of this article is to
show that a switching damping strategy may outper-
form a constant damping approach, which occurs for
the single damper case described above, we do not
compare the performance of the two approaches in the
case of multiple dampers. However, we show that this
case is associated with a non-convex optimisation
problem.In the case of multiple dampers, as that depicted in
Figure 2, the transfer function takes the extended form
g
z
w
Figure 1. Oscillating system with a feedback made of a singledamper whose coefficient g varies with time. w and z are theexternal input and performance output, respectively.
International Journal of Control 1889

valid for E2¼ 0 (or a similar form for E1¼ 0)
Fðs, g1, g2, . . . , gmÞ ¼�ðs2Þ þ
Pmk¼1ð gk�kðs
2ÞÞ
�ðs2Þ þPm
k¼1ð gk�kðs2ÞÞ
For the energy-to-energy gain minimisation problem,the following inequality must hold for anycandidate �4 0
�ð�!Þ2 þ ðPm
k¼1 gk�kð�!ÞÞ2
�ð�!Þ2 þ ðPm
k¼1 gk�kð�!ÞÞ2� �2:
However, this condition is difficult to solve, andrequires cumbersome computation. Therefore it isconvenient to apply the well-known condition thatJ1(g)5� if for some positive definite constant matrixP, in short P4 0, we have
Að gÞTPþ PAð gÞ PE HT
ETP ��2I 0
H 0 �I
264
3755 0,
for all g where the involved matrices are those in (6).The previous conditions is a LMI for fixed g, butnon-convex as long as the vector parameter g is to betuned. For low dimensional g the problem is affordablewithout difficulties, but might be hard to solve in caseof many components gi.
4. Time-varying dampers and switching
4.1 Advantage of a switching architecture
Since on-line tuning of the parameter does not affectstability, any technique can be employed to adapt thegain (Kim et al. 2001) including extremum seekingcontrol (Hayakawa et al. 1999) or, more in general,adaptive techniques. For instance, the practical imple-mentation of time-varying damping systems has beeninvestigated considering switching shunt of piezo-electric strain transducers bonded to flexible structures.In general, shunt devices are composed by resonantelectric networks that enhance the vibration energyabsorption by the piezoelectric transducer at narrowband frequencies. However, switching techniques have
been developed, which present simultaneously good
damping performance over wide frequency bands,
good robustness and low-power requirements
(Lallart, Lefeuvre, Richard, and Guyomar 2008;
Lallart and Guyomar 2010).
4.2 Switching outperforms static damping understate feedback
The first result shows that any on-line variation of the
parameter does not compromise robust stability. To
address this issue we introduce the following
assumption.
Assumption 4.1: The parameter g¼ (g1, . . . , gm)
belongs to some bounded interval G¼4½ g�1 , g
þ1 � �
� � � � ½ g�m, gþm�.
Proposition 4.2: Assume that system (6) (with possibly
uncertain parameters) satisfies Assumptions 2.1 and 2.3.
Then robust stability is assured under arbitrary time-
variations of gi, giðtÞ 2 ½ g�i , g
þi �, including switching
giðtÞ 2 fg�i , gþi g.
Proof: It is based on Krasowskii arguments and
reported for the sake of completeness.Consider the energy
VðxÞ ¼1
2½xT2 x2 þ xT1Kx1�
as a candidate Lyapunov function. Assuming
u¼�G(t)y, the time-derivative of V is
_VðxÞ ¼ �xT2B2GðtÞCx2
¼ �Xpk¼1
xT2B2kgkðtÞC2kx2 � �Xpk¼1
xT2B2kg�k C2kx2
Therefore, the energy V(x(t)) is non-increasing and
converges monotonically to a non-negative value.
Correspondingly, _VðxðtÞÞ ! 0, and since all the terms
in the sum are non-negative, therefore x2(t) converges
to the set for which
xT2B2kg�k C2kx2 ¼ 0
for all k. Namely x converges either to a subspace for
which xT2B2k ¼ 0 or C2kx2¼ 0, and since B2k and C2k
are aligned, to the subspace
C2x2 ¼ 0:
The derivative vector on this subspace is
_x1
_x2
� �¼
0 I
�K �B2GC2
� �x1
x2
� �¼
0 I
�K 0
� �x1
x2
� �:
w
z
u1
u2
u3
Figure 2. Oscillating system with two dampers.
1890 F. Blanchini et al.

Then to preserve the condition C2x2¼ 0, it must be
d
dtðC2x2Þ ¼ C2 _x2 ¼ �C2Kx1 ¼ 0:
In turn this condition has to be preserved, so that
d
dtðC2Kx1Þ ¼ C2K _x1 ¼ C2Kx2 ¼ 0:
Then recursively, one must have C2K _x2 ¼ 0, hence
C2K2x1¼ 0, and then C2K
2x2¼ 0 and so on to get
C2Kix2 ¼ 0:
On the other hand, denoting by O the observability
matrix, we have
O0
x2
� �¼
0 C2
�C2K 0
0 �C2K
C2K2 0
: :
26666664
37777775
0
x2
� �¼ 0,
then if x2 6¼ 0 the observability assumptions would be
violated. Hence, x2 and its derivative must converge to
zero. Since K is positive definite, x1 must converges to 0
as well.
The following theorem shows that the strategy of
switching among different values of g may perform
better than a feedback with a constant g.
Theorem 4.3: Assume that the (possibly optimal)
gain g provides a value J1. Then there exists a
switching strategy which achieves at least the same
performances. œ
Proof: Consider the case of the H1 strategy and
suppose that a constant gain g(t)¼ g is applied. Then
by the standard H1 theory (Zhou, Doyle, and Glower
1996; Sanchez Pena and Sznaier 1998) J15 1 if and
only if3 there exists a positive definite matrix P such
that, for all t� 0,
d
dtxðtÞ>PxðtÞ5 � kzðtÞk2 þ kwðtÞk2: ð12Þ
In fact, by integrating Equation (12) from the current
instant t to infinity, we obtainZ 1t
ðkzðÞk2 � kwðÞk2Þd � xðtÞ>PxðtÞ:
The function xðtÞ>PxðtÞ is the so called storage
function and for the initial condition x(0)¼ 0 we haveZ 10
kzðÞk2d �
Z 10
kwðÞk2d � 1,
which means J15 1. It is known that P must satisfythe Riccati equation
A>ðgÞPþ PAðgÞ þ PEE>Pþ H>H ¼ 0:
Again, denoting by xðtÞ the constant-gain solution fora given current state and for g(t)¼ g, by minimising thederivative of xðtÞ>PxðtÞ we obtain
ming2½ g�,gþ�
d
dtxðtÞ>PxðtÞ
�d
dtxðtÞ>PxðtÞ � �kzðtÞk2 þ kwðtÞk2:
Thus in a right neighbourhood of t, we have
xðtþ Þ>Pxðtþ Þ � xðtþ Þ>Pxðtþ Þ,
which means that the storage function x>Px achievedby the constant gain is always an upper bound for theenergy achieved by the switching strategy. On the otherhand, it is known that (12) is an equality for the worstcase of the input w and therefore the constant gaincannot outperform the switching gain strategy. œ
Therefore the strategy suggested by the previoustheorem is
gðxÞ ¼ arg mingi2fg
�i,gþ
ig
x>PAð gÞx:
4.3 Switching without state feedback
The switching strategy requires the knowledge of thestate of the system, since it is based on the minimisa-tion of the quantity x>PA(g)x, hence an observer isneeded. This requirement is reasonable in simplesystems, but it may be difficult to fulfill for high-orderdistributed flexible structures. In this case the use of anopen-loop switching strategy may be a viable solution.A possibility is to apply a dynamic random processwith transition probabilities suitably chosen.
Denote by Ai, for i¼ 1, 2, . . . , 2m, the matricesachieved by taking all possible values of the parametersat their extrema. The transition probability among thediscrete states can be governed by a Markov matrix Q,the entries of which verifyX
j
qij ¼ 0, qii 5 0:
This is a Markov-jump system whose performance isgiven by the following condition (de Souza, Trofino,and Barbosa 2006).
Proposition 4.4: The index J1 satisfies, J1�� ifand only if there exist symmetric matrices Pj4 0
International Journal of Control 1891

such that
ATi Pi þ PiAi þ
Pj qijPj PiE HT
ETPi ��2I 0
H 0 �I
264
3755 0 ð13Þ
The Markov chain Q is a design parameter which hasto be optimised rather then assigned as in most of theexisting literature. Unfortunately, the last quadraticcondition is bilinear in the matrices Pi and Q and noconvex characterisation of the set of solutions can beprovided. None the less, the random switching approachappears to be promising, as shown by Example 6.2 inSection 6.
5. The H2 and l1 cases
5.1 H2 performance and switching
The H2 performance in the case of a single transferfunction can be expressed in the frequency domain as:
J2ð gÞ ¼1
�
Z 10
Fð j!, gÞFð�j!, gÞd!: ð14Þ
Adopting the same notations of the previous sections,we obtain
J2ð�Þ ¼1
�
Z 10
�ð�!2Þ2þ �!2�ð�!2Þ
2
�ð�!2Þ2þ �!2�ð�!2Þ
2d!,
where, again, �¼ g2. As observed by As observed byBlanchini et al. (2011), one may take advantage from aconvex–concave decomposition of this functional, butit is not clear if the optimisation problem admitsmultiple local minima.
The performance optimisation can be approachedby means of standard theory (Zhou et al. 1996) bysolving the problem
J2 ¼ ming
trfETPEg,
s:t: Að gÞTPþ PAð gÞ ¼ �HTH,ð15Þ
which is equivalent to minimising the ratio of twopolynomials in g, as shown by the following result.
Theorem 5.1: Problem (15) is equivalent to the mini-misation of the ratio of two polynomials in g. œ
Proof: By introducing the notation ~g ¼ g� g�,A1¼A(g�) and
A2 ¼Að gþÞ � Að g�Þ
gþ � g�,
the Lyapunov equation in (15) can be written as
A1 þ ~gA2ð ÞTPþ P A1 þ ~gA2ð Þ ¼ �HTH, ð16Þ
an equation whose solution can be found via
Kronecker products and sums (Zhou et al. 1996).
By defining4
~A1 ¼ AT1 � I2n þ I2n � AT
1 ,
~A2 ¼ AT2 � I2n þ I2n � AT
2 ,
X ¼ vecfPg,
the optimal H2 index can be found as
J2 ¼ ming
vecfEETgTX,
s:t: ~A1 þ ~g ~A2
�X ¼ �vecfHTHg:
Now, since by Proposition 4.2 A1 is invertible, so is ~A1,
hence the problem can be rewritten as
J2 ¼ ming
vecfEETgTX,
s:t: Iþ ~g ~A�11~A2
�X ¼ � ~A�11 vecfHTHg,
which results in the minimisation problem
J2 ¼ ming�vecfEETgT Iþ ~g ~A�11
~A2
��1~A�11 vecfHTHg:
It is straightforward to see that the term to be
minimised is the ratio of two polynomials in ~g and
hence in g. œ
Once the former problem has been solved, one can
again improve the performance by switching. The
following result holds.5
Theorem 5.2: Assume that the (possibly optimal) gain
g provides the value J2 for the cost function (14). There
exists a state-feedback strategy which assures at least
the same performances.
Proof: Consider the Lyapunov equation
AðgÞ>Pþ PAðgÞ ¼ �H>H: ð17Þ
The integral of the energy from the current instant t to
infinity is
J2,resðtÞ ¼4
Z 1t
zð gðÞ, Þ2d
¼
Z 1t
xð gðÞ, Þ>H>Hxð gðÞ, Þd: ð18Þ
Denote by J2,resðtÞ the value achieved when in (18), a
constant gain g()¼ g is used. In view of (17),
J2,resðtÞ ¼ �
Z 1t
xðg, Þ> AðgÞ>Pþ PAðgÞ �
xðg, Þd
¼ xðtÞ>PxðtÞ:
1892 F. Blanchini et al.

Now, consider again the index (18), and suppose that
the constant value g()¼ g, not necessarily equal to g,
is applied in the interval [t, tþ ] and the value g from
the instant tþ on, so that the state value at tþ equals eAð g
ÞxðtÞ and the resulting cost J2,res(t) isZ tþ
t
x>ð g, ÞH>Hxð g, Þd
þ xðtÞ>eA>ð gÞPeAð g
ÞxðtÞ
¼ x>ðtÞ
Z
0
eA>ð gÞH>HeAð g
Þd
� �xðtÞ
þ x>ðtÞeA>ð gÞPeAð g
ÞxðtÞ:
The above expression can be written by using theexponential power series expansion, that is, for a
matrix M and a scalar �, the identity
eM� ¼ Iþ �MþOð�2Þ,
with O(�)! 0 when �! 0. We obtain
J2,resðtÞ ¼ x>ðtÞhH>H þ A>ð gÞH>Hþ H>HAð gÞ
��2
2þ Pþ A>ð gÞPþ PAð gÞ
�þOð2Þ
ixðtÞ,
where O(2)! 0 when ! 0. Therefore, with the given
strategy, the integral of the energy from the current
instant t to infinity is
x>ðtÞ Pþ H>Hþ A>ð gÞPþ PAð gÞ � �
xðtÞ
þ x>ðtÞOð2ÞxðtÞ:
A minimisation of the residual energy, up to the
first-order term, is obtained by minimising the above
value with respect to g, namely by adopting the
following strategy
gðtÞ ¼ arg ming2½ g�,gþ�
xðtÞ> PAð gÞ þ A>ð gÞP �
xðtÞ: ð19Þ
Since the above minimisation results in a value of
J2res(t) not greater than J2,resðtÞ, this means that for a
given state x(t) at time t, the residual energy at timetþ , for any 4 0, achieved by the switching strategy
is not greater than the energy achieved by a constant g,
which means that the constant-gain strategy cannot be
better than the switching one. œ
Note that a more general class of controllers can be
designed if one allows an active control, rather than a
semi-active architecture. The reader is referred to
Geromel, Colaneri, and Bolzern (2008) for details
and a survey. However, in the presence of a more
general architecture, the robust stability is a major
issue, while here stability is assured under arbitrary
switching.
5.2 l1 performance and switching
The l1 performances of (6) for given g can be computed
as follows. Denote by F(t, g) the impulse response
matrix corresponding to the gain g. Then, given the
bound suptjwi(t)j5 1 for all i, the performance
index (7) is given by Barabanov and Granichin
(1984) and Dahleh and Pearson (1987)
J1 ¼ maxi
Xj
Z 10
jFijðt, gÞjdt:
Assuming that a certain performance J1 is assured via
static feedback with constant feedback gain g, the
question is if also in this case a switching strategy can
achieve at least the same performance. We can provide
a positive answer to this question (up to an arbitrarily
small tolerance) along with a constructive solution.
Theorem 5.3: Assume that J1(g) is the (optimal)
performance given by the vector gain g. Then given
4 0 there exists a switching strategy which achieves the
performance J1(g)þ .
Proof: The proof is based on the set–theoretic
characterisation of J1 (Blanchini and Miani 2008).
The performance is equivalent to the existence of a
convex and compact set P including the origin in its
interior and included in the set
Sð Þ ¼ fx : kHxk1 � J1ðgÞ þ g
For a small 4 0 we can approximate (Blanchini and
Miani 1999) P by S(0) which is the unit ball in a
smooth norm6 V(x) for which
rVðxÞ½AðgÞxþ Ew� � ��,
for all w such that kw k1� 1, for some �4 0, and for
all x such that V(x)� 1. From this Lyapunov
characterisation, and the fact that A(g) is affine in g,
we have
arg mingi2fg
�i,gþ
igrVðxÞ½Að gÞxþ Ew�
� rVðxÞ½AðgÞxþ Ew� � ��:
which implies that the set S is attractive for the system
governed by the switching rule
gðtÞ ¼ arg mingi2fg
�i,gþ
igrVðxÞ½Að gÞxþ Ew�:
œ
International Journal of Control 1893
6. Examples
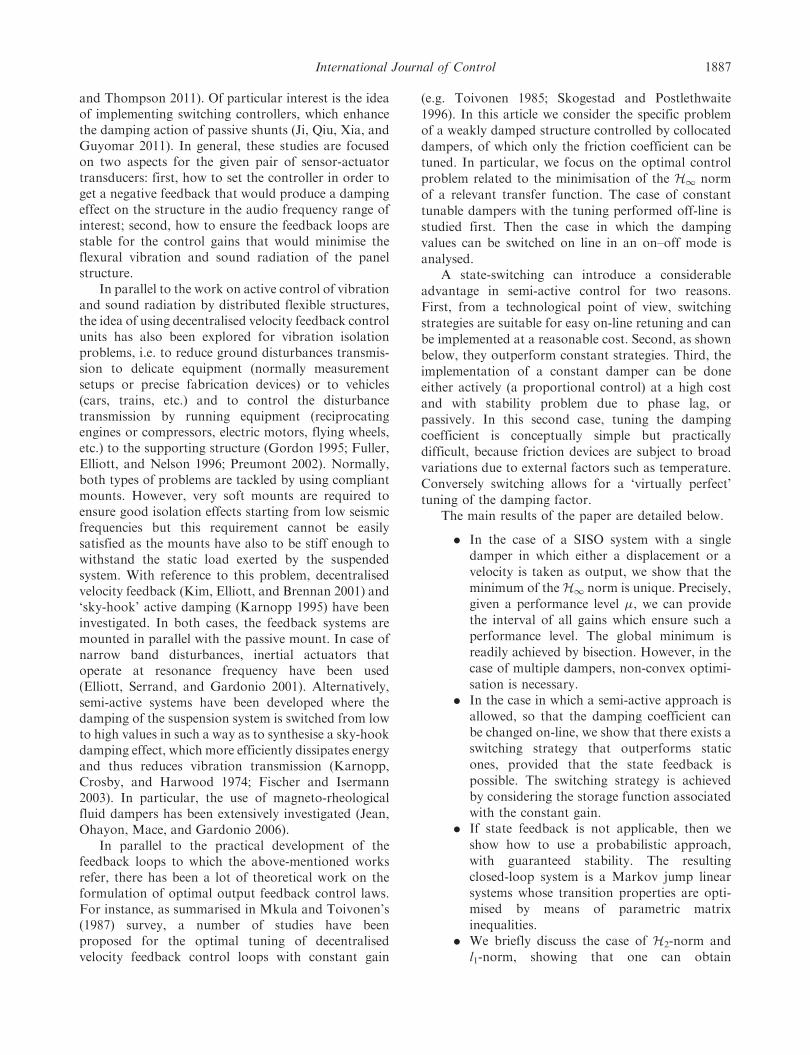
Example 6.1 (An oscillator with additive damping
mass): Consider the simple case of a single degree of
freedom system, as the spring–mass k1–m1 in Figure 3,
along with an additional mass m2 with a damper
g2 [0.1, 10] in parallel with spring k2. The system
equations of motion are
€q1
€q2
" #¼�ðk1 þ k2Þ k2
k2 �k2
" #q1
q2
" #þ
1
�1
" #uþ
1
1
" #w
while the outputs are defined by y ¼ _q2 � _q1and z¼ q1.
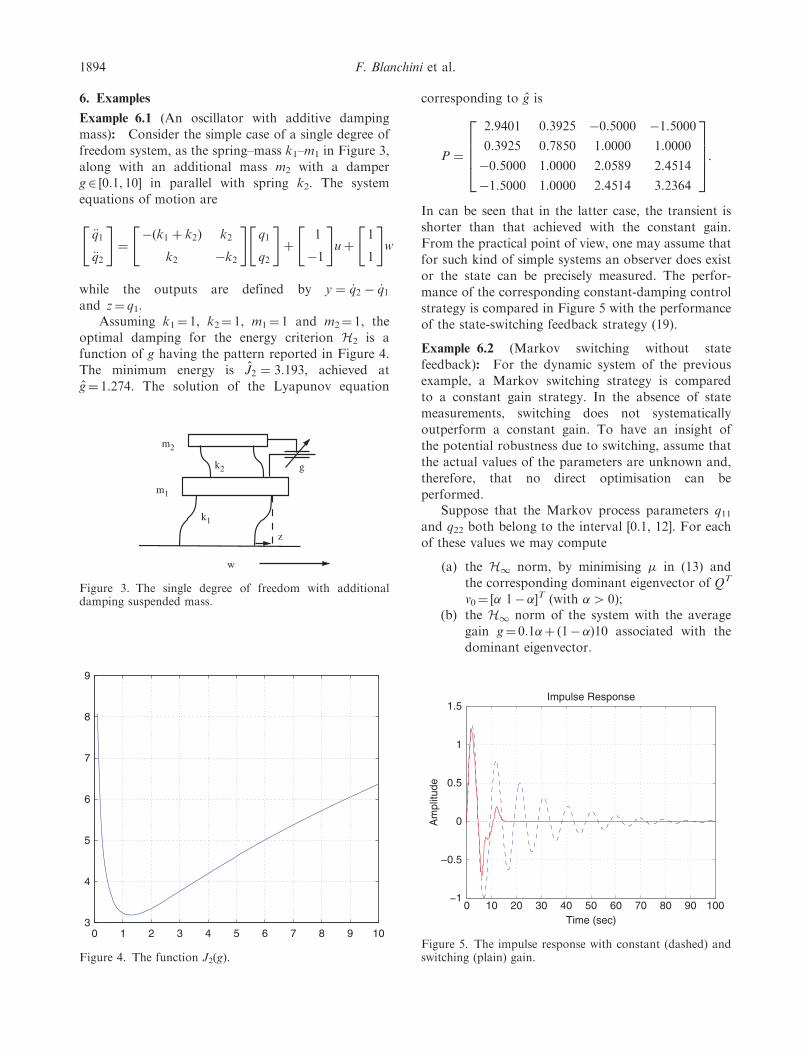
Assuming k1¼ 1, k2¼ 1, m1¼ 1 and m2¼ 1, the
optimal damping for the energy criterion H2 is a
function of g having the pattern reported in Figure 4.
The minimum energy is J2 ¼ 3:193, achieved at
g¼ 1.274. The solution of the Lyapunov equation
corresponding to g is
P ¼
2:9401 0:3925 �0:5000 �1:5000
0:3925 0:7850 1:0000 1:0000
�0:5000 1:0000 2:0589 2:4514
�1:5000 1:0000 2:4514 3:2364
26664
37775:
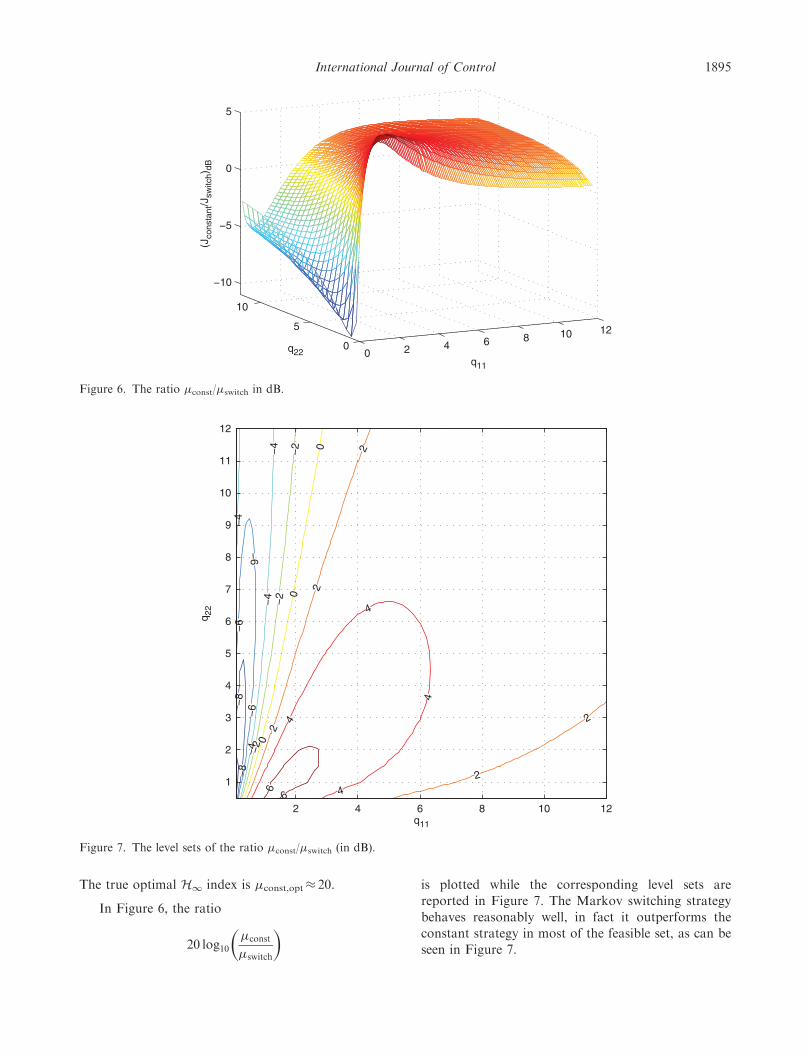
In can be seen that in the latter case, the transient is
shorter than that achieved with the constant gain.
From the practical point of view, one may assume that
for such kind of simple systems an observer does exist
or the state can be precisely measured. The perfor-
mance of the corresponding constant-damping control
strategy is compared in Figure 5 with the performance
of the state-switching feedback strategy (19).
Example 6.2 (Markov switching without state
feedback): For the dynamic system of the previous
example, a Markov switching strategy is compared
to a constant gain strategy. In the absence of state
measurements, switching does not systematically
outperform a constant gain. To have an insight of
the potential robustness due to switching, assume that
the actual values of the parameters are unknown and,
therefore, that no direct optimisation can be
performed.Suppose that the Markov process parameters q11
and q22 both belong to the interval [0.1, 12]. For each
of these values we may compute
(a) the H1 norm, by minimising � in (13) and
the corresponding dominant eigenvector of QT
v0¼ [� 1� �]T (with �4 0);(b) the H1 norm of the system with the average
gain g¼ 0.1�þ (1� �)10 associated with the
dominant eigenvector.
0 1 2 3 4 5 6 7 8 9 103
4
5
6
7
8
9
Figure 4. The function J2(g).
0 10 20 30 40 50 60 70 80 90 100−1
−0.5
0
0.5
1
1.5Impulse Response
Time (sec)
Am
plitu
de
Figure 5. The impulse response with constant (dashed) andswitching (plain) gain.
m2
m1
k2
k1
g
w
z
Figure 3. The single degree of freedom with additionaldamping suspended mass.
1894 F. Blanchini et al.
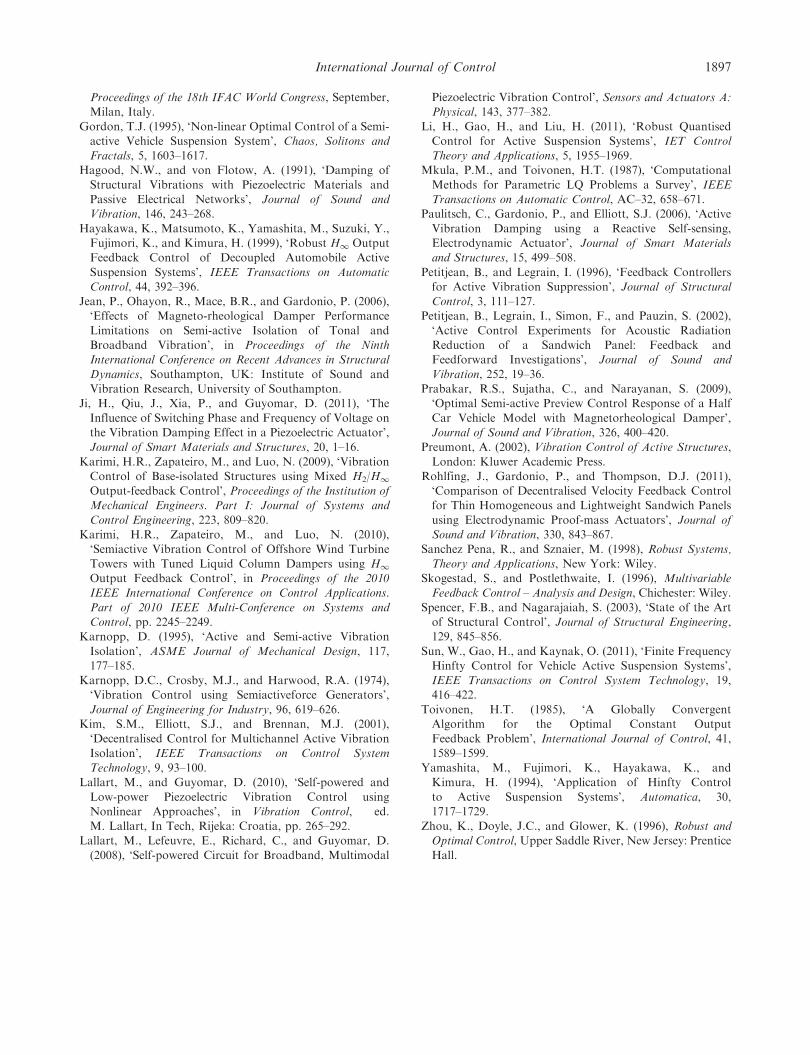
The true optimal H1 index is �const,opt 20.
In Figure 6, the ratio
20 log10�const
�switch
� �is plotted while the corresponding level sets are
reported in Figure 7. The Markov switching strategy
behaves reasonably well, in fact it outperforms the
constant strategy in most of the feasible set, as can be
seen in Figure 7.
−8−
8−
6
−6
−6
−4
−4
−4
−4
−2
−2−
2
0
0
0
2
2
2
2
24
4
4
46
6
q11
q 22
2 4 6 8 10 12
1
2
3
4
5
6
7
8
9
10
11
12
Figure 7. The level sets of the ratio �const/�switch (in dB).
0 2 4 6 8 10 12
0
5
10
−10
−5
0
5
q11
q22
(Jco
nsta
nt/J
switc
h)dB
Figure 6. The ratio �const/�switch in dB.
International Journal of Control 1895

7. Conclusions
We have investigated the problem of optimal semi-active damping of vibrating structures, taking intoaccount, in particular, the H1 criterion. In the case ofa single constant damper, finding the H1 performanceis a quasi-convex problem, while in the case of multipledampers the problem does not have this feature andtime-expensive computations may be required.Moreover, we have shown that in the case of tunabledampers, and in particular in the case of dampers thatcan be switched on and off, a state-feedback controlstrategy outperforming the static (optimal) can bedesigned. In the case of distributed flexible structures,where state-feedback is unrealistic, a stochastic strat-egy based on a Markov-jump criterion may beeffective.
Notes
1. If H1¼ 0 the numerator is s�(s2)þ g�(s2).2. A function f is quasi-convex if f(�xþ (1��)y)�
max{f(x), f( y)}.3. For a simpler presentation the cost function can be
normalised to one without loss of generality.4. (vec{P} is the vector obtained by stacking the columns
of the matrix P one on top of the other.5. The proof could be derived from Geromel et al. (2008);
however, for the sake of completeness, a simple proof isshown here.
6. This means S(0)¼ {x: V(x)� 1}.
References
Alujevic, N., Gardonio, P., and Frampton, K.D. (2011),
‘Experiments on a Smart Double Panel for the Sound
Radiation Control: Blended Velocity Feedback’, AIAA
Journal, 49, 1123–1134.Balas, M.J. (1979), ‘Direct Velocity Feedback Control of
Large Space Structures’, Journal of Guidance and Control,
2, 252–253.
Barabanov, N.E., and Granichin, O.N. (1984), ‘Optimal
Controller for a Linear Plant with Bounded Noise’,
Automatic Remote Control, 45, 578–584.Bianchi, E., Gardonio, P., and Elliott, S.J. (2004), ‘Smart
Panel with Multiple Decentralised Units for the Control of
Sound Transmission. Part III: Control System
Implementation’, Journal of Sound and Vibration, 274,
215–232.
Blanchini, F., Casagrande, D., Gardonio, P., and Miani, S.
(2011), ‘On Optimal Damping of Vibrating Structures’, in
Proceedings of the 18th IFAC World Congress, September,
Milan, Italy.Blanchini, F., and Miani, S. (1999), ‘A Universal Class of
Smooth Functions for Robust Control’, IEEE
Transactions on Automatic Control, 44, 641–647.Blanchini, F., and Miani, S. (2008), Set-theoretic Methods in
Control, Boston: Birkhauser.
Canale, M., Milanese, M., and Novara, C. (2006), ‘Semi-active Suspension Control using Fast Model Predictive
Techniques’, IEEE Transactions on Control SystemTechnology, 14, 1034–1046.
Cavallo, A., De Maria, G., Natale, C., and Pirozzi, S. (2010),
‘Active Control of Flexible Structures, from Modelling toimplementation’, Ser. Advanced in Industrial Control,Springer Verlag, ISBN: 978-1-84996-280-3.
Clark, R.L., Saunders, R.L., and Gibbs, G.P. (1978),Adaptive Structures: Dynamics and Control, New York:Wiley.
Cole, D.G., and Clark, R.L. (1994), ‘Adaptive Compensationof Piezoelectric Sensoriactuators’, Journal of IntelligentMaterial Systems and Structures, 5, 665–672.
Dahleh, M.A., and Pearson, J.B. (1987), ‘l1-OptimalFeedback Controllers for MIMO Discrete-time System’,IEEE Transactions on Automatic Control, 32, 314–322.
de Souza, C.E., Trofino, A., and Barbosa, K.A. (2006),‘Mode-independent H1 Filters for Markovian JumpLinear Systems’, IEEE Transactions on Automatic
Control, 51, 1837–1841.Dosch, J.J., Inman, D.J., and Garcia, E. (1992), ‘A Self-sensing Piezoelectric Actuator for Collocated Control’,
Journal of Intelligent Material Systems and Structures, 3,166–185.
Du, H., Sze, K.Y., and Lam, J. (2005), ‘Semi-active H1
Control of Vehicle Suspension with Magneto-rheologicalDampers’, Journal of Sound and Vibration, 283, 981–996.
Elliott, S.J., Gardonio, P., Sors, T.C., and Brennan, M.J.(2002), ‘Active Vibro-acoustic Control with Multiple
Feedback Loops’, Journal of the Acoustical Society ofAmerica, 111, 908–915.
Elliott, S.J., Serrand, M., and Gardonio, P. (2001),
‘Feedback Stability Limits for Active Isolation Systemswith Reactive and Inertial Actuators’, Journal of Vibrationand Acoustics, 123, 250–261.
Fallah, M.S., Bhat, R., and Xie, W. (2010), ‘H1 RobustControl of Semi-active Macpherson Suspension System:New Applied Design’, Vehicle System Dynamics, 48,
339–360.Fischer, D., and Isermann, R. (2003), ‘Mechatronic Semi-active and Active Vehicle Suspensions’, Control
Engineering Practice, 12, 1353–1367.Fuller, C.R., Elliott, S.J., and Nelson, P.A. (1996), ActiveControl of Vibration, London: Academic Press.
Gardonio, P., Aoki, Y., and Elliott, S.J. (2010), ‘Smart Panelwith Active Damping Wedges Along the Perimeter’,Journal of Smart Materials and Structures, 19, 1–15.
Gardonio, P., Miani, S., Blanchini, F., Casagrande, D., andElliott, S.J. (2012), ‘Plate with Decentralised VelocityFeedback Loops: Power Absorption and Kinetic Energy
Considerations’, Journal of Sound and Vibrations, 331,1722–1741.
Geromel, J.C., Colaneri, P., and Bolzern, P. (2008),
‘Dynamic Output Feedback Control of Switched LinearSystems’, IEEE Transactions on Automatic Control, 53,720–733.
Geromel, J., Deaecto, G.S., and Daafouz, J. (2011),‘Suboptimal Switching State Feedback ControlConsistency Analysis for Switched Linear Systems’, in
1896 F. Blanchini et al.
Proceedings of the 18th IFAC World Congress, September,Milan, Italy.
Gordon, T.J. (1995), ‘Non-linear Optimal Control of a Semi-active Vehicle Suspension System’, Chaos, Solitons andFractals, 5, 1603–1617.
Hagood, N.W., and von Flotow, A. (1991), ‘Damping of
Structural Vibrations with Piezoelectric Materials andPassive Electrical Networks’, Journal of Sound andVibration, 146, 243–268.
Hayakawa, K., Matsumoto, K., Yamashita, M., Suzuki, Y.,Fujimori, K., and Kimura, H. (1999), ‘Robust H1 OutputFeedback Control of Decoupled Automobile Active
Suspension Systems’, IEEE Transactions on AutomaticControl, 44, 392–396.
Jean, P., Ohayon, R., Mace, B.R., and Gardonio, P. (2006),‘Effects of Magneto-rheological Damper Performance
Limitations on Semi-active Isolation of Tonal andBroadband Vibration’, in Proceedings of the NinthInternational Conference on Recent Advances in Structural
Dynamics, Southampton, UK: Institute of Sound andVibration Research, University of Southampton.
Ji, H., Qiu, J., Xia, P., and Guyomar, D. (2011), ‘The
Influence of Switching Phase and Frequency of Voltage onthe Vibration Damping Effect in a Piezoelectric Actuator’,Journal of Smart Materials and Structures, 20, 1–16.
Karimi, H.R., Zapateiro, M., and Luo, N. (2009), ‘VibrationControl of Base-isolated Structures using Mixed H2/H1Output-feedback Control’, Proceedings of the Institution ofMechanical Engineers. Part I: Journal of Systems and
Control Engineering, 223, 809–820.Karimi, H.R., Zapateiro, M., and Luo, N. (2010),‘Semiactive Vibration Control of Offshore Wind Turbine
Towers with Tuned Liquid Column Dampers using H1Output Feedback Control’, in Proceedings of the 2010IEEE International Conference on Control Applications.
Part of 2010 IEEE Multi-Conference on Systems andControl, pp. 2245–2249.
Karnopp, D. (1995), ‘Active and Semi-active Vibration
Isolation’, ASME Journal of Mechanical Design, 117,177–185.
Karnopp, D.C., Crosby, M.J., and Harwood, R.A. (1974),‘Vibration Control using Semiactiveforce Generators’,
Journal of Engineering for Industry, 96, 619–626.Kim, S.M., Elliott, S.J., and Brennan, M.J. (2001),‘Decentralised Control for Multichannel Active Vibration
Isolation’, IEEE Transactions on Control SystemTechnology, 9, 93–100.
Lallart, M., and Guyomar, D. (2010), ‘Self-powered and
Low-power Piezoelectric Vibration Control usingNonlinear Approaches’, in Vibration Control, ed.M. Lallart, In Tech, Rijeka: Croatia, pp. 265–292.
Lallart, M., Lefeuvre, E., Richard, C., and Guyomar, D.
(2008), ‘Self-powered Circuit for Broadband, Multimodal
Piezoelectric Vibration Control’, Sensors and Actuators A:Physical, 143, 377–382.
Li, H., Gao, H., and Liu, H. (2011), ‘Robust QuantisedControl for Active Suspension Systems’, IET ControlTheory and Applications, 5, 1955–1969.
Mkula, P.M., and Toivonen, H.T. (1987), ‘Computational
Methods for Parametric LQ Problems a Survey’, IEEETransactions on Automatic Control, AC–32, 658–671.
Paulitsch, C., Gardonio, P., and Elliott, S.J. (2006), ‘Active
Vibration Damping using a Reactive Self-sensing,Electrodynamic Actuator’, Journal of Smart Materialsand Structures, 15, 499–508.
Petitjean, B., and Legrain, I. (1996), ‘Feedback Controllersfor Active Vibration Suppression’, Journal of StructuralControl, 3, 111–127.
Petitjean, B., Legrain, I., Simon, F., and Pauzin, S. (2002),
‘Active Control Experiments for Acoustic RadiationReduction of a Sandwich Panel: Feedback andFeedforward Investigations’, Journal of Sound and
Vibration, 252, 19–36.Prabakar, R.S., Sujatha, C., and Narayanan, S. (2009),‘Optimal Semi-active Preview Control Response of a Half
Car Vehicle Model with Magnetorheological Damper’,Journal of Sound and Vibration, 326, 400–420.
Preumont, A. (2002), Vibration Control of Active Structures,
London: Kluwer Academic Press.Rohlfing, J., Gardonio, P., and Thompson, D.J. (2011),‘Comparison of Decentralised Velocity Feedback Controlfor Thin Homogeneous and Lightweight Sandwich Panels
using Electrodynamic Proof-mass Actuators’, Journal ofSound and Vibration, 330, 843–867.
Sanchez Pena, R., and Sznaier, M. (1998), Robust Systems,
Theory and Applications, New York: Wiley.Skogestad, S., and Postlethwaite, I. (1996), MultivariableFeedback Control – Analysis and Design, Chichester: Wiley.
Spencer, F.B., and Nagarajaiah, S. (2003), ‘State of the Artof Structural Control’, Journal of Structural Engineering,129, 845–856.
Sun, W., Gao, H., and Kaynak, O. (2011), ‘Finite FrequencyHinfty Control for Vehicle Active Suspension Systems’,IEEE Transactions on Control System Technology, 19,416–422.
Toivonen, H.T. (1985), ‘A Globally ConvergentAlgorithm for the Optimal Constant OutputFeedback Problem’, International Journal of Control, 41,
1589–1599.Yamashita, M., Fujimori, K., Hayakawa, K., andKimura, H. (1994), ‘Application of Hinfty Control
to Active Suspension Systems’, Automatica, 30,1717–1729.
Zhou, K., Doyle, J.C., and Glower, K. (1996), Robust andOptimal Control, Upper Saddle River, New Jersey: Prentice
Hall.
International Journal of Control 1897