concept for automated sorting robotic arm
TRANSCRIPT

ScienceDirect
Available online at www.sciencedirect.comAvailable online at www.sciencedirect.com
ScienceDirect Procedia Manufacturing 00 (2017) 000–000
www.elsevier.com/locate/procedia
* Paulo Afonso. Tel.: +351 253 510 761; fax: +351 253 604 741 E-mail address: [email protected]
2351-9789 © 2017 The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the Manufacturing Engineering Society International Conference 2017.
Manufacturing Engineering Society International Conference 2017, MESIC 2017, 28-30 June 2017, Vigo (Pontevedra), Spain
Costing models for capacity optimization in Industry 4.0: Trade-off between used capacity and operational efficiency
A. Santanaa, P. Afonsoa,*, A. Zaninb, R. Wernkeb
a University of Minho, 4800-058 Guimarães, Portugal bUnochapecó, 89809-000 Chapecó, SC, Brazil
Abstract
Under the concept of "Industry 4.0", production processes will be pushed to be increasingly interconnected, information based on a real time basis and, necessarily, much more efficient. In this context, capacity optimization goes beyond the traditional aim of capacity maximization, contributing also for organization’s profitability and value. Indeed, lean management and continuous improvement approaches suggest capacity optimization instead of maximization. The study of capacity optimization and costing models is an important research topic that deserves contributions from both the practical and theoretical perspectives. This paper presents and discusses a mathematical model for capacity management based on different costing models (ABC and TDABC). A generic model has been developed and it was used to analyze idle capacity and to design strategies towards the maximization of organization’s value. The trade-off capacity maximization vs operational efficiency is highlighted and it is shown that capacity optimization might hide operational inefficiency. © 2017 The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the Manufacturing Engineering Society International Conference 2017.
Keywords: Cost Models; ABC; TDABC; Capacity Management; Idle Capacity; Operational Efficiency
1. Introduction
The cost of idle capacity is a fundamental information for companies and their management of extreme importance in modern production systems. In general, it is defined as unused capacity or production potential and can be measured in several ways: tons of production, available hours of manufacturing, etc. The management of the idle capacity
Procedia Manufacturing 20 (2018) 400–405
2351-9789 © 2018 The Authors. Published by Elsevier B.V.Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.10.1016/j.promfg.2018.02.058
10.1016/j.promfg.2018.02.058 2351-9789
© 2018 The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
Available online at www.sciencedirect.com
ScienceDirect
Procedia Manufacturing 00 (2017) 000–000 www.elsevier.com/locate/procedia
2351-9789© 2017 The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
2nd International Conference on Materials Manufacturing and Design Engineering
Concept for Automated Sorting Robotic Arm Shah R., Pandey A. B.*
Department of Mechanical Engineering, Faculty of Technology & Engineering, The Maharaja Sayajirao University of Baroda, Vadodara, Gujarat, India,
*[email protected] [email protected]
Abstract
Repetitive tasks and high accuracy have become the two contradictory needs of any industrial process. By introducing autonomous robotic applications, simple repetitive tasks can be accomplished keeping the demands of the accuracy and speed in mind. Nowadays in this fast growing industrial age every company needs speed in manufacturing to cope up with the customer’s requirements. The basic objective of our project is to develop a versatile and low cost robotic arm which can be utilized in any industry to eliminate this problem.
© 2017The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
Keywords:Robotic Arm; Automation; Sorting; Sensors; Motors
1. Introduction
A robotic arm is a robot manipulator, usually programmable, with similar functions to a human arm. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand. The end effector can be designed to perform any desired task such as welding, gripping, spinning etc.,
* Corresponding author. Tel.: +0-000-000-0000 ; fax: +0-000-000-0000 .
E-mail address:[email protected]
Available online at www.sciencedirect.com
ScienceDirect
Procedia Manufacturing 00 (2017) 000–000 www.elsevier.com/locate/procedia
2351-9789© 2017 The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
2nd International Conference on Materials Manufacturing and Design Engineering
Concept for Automated Sorting Robotic Arm Shah R., Pandey A. B.*
Department of Mechanical Engineering, Faculty of Technology & Engineering, The Maharaja Sayajirao University of Baroda, Vadodara, Gujarat, India,
*[email protected] [email protected]
Abstract
Repetitive tasks and high accuracy have become the two contradictory needs of any industrial process. By introducing autonomous robotic applications, simple repetitive tasks can be accomplished keeping the demands of the accuracy and speed in mind. Nowadays in this fast growing industrial age every company needs speed in manufacturing to cope up with the customer’s requirements. The basic objective of our project is to develop a versatile and low cost robotic arm which can be utilized in any industry to eliminate this problem.
© 2017The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
Keywords:Robotic Arm; Automation; Sorting; Sensors; Motors
1. Introduction
A robotic arm is a robot manipulator, usually programmable, with similar functions to a human arm. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand. The end effector can be designed to perform any desired task such as welding, gripping, spinning etc.,
* Corresponding author. Tel.: +0-000-000-0000 ; fax: +0-000-000-0000 .
E-mail address:[email protected]
Available online at www.sciencedirect.com
ScienceDirect
Procedia Manufacturing 00 (2017) 000–000 www.elsevier.com/locate/procedia
2351-9789© 2017 The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
2nd International Conference on Materials Manufacturing and Design Engineering
Concept for Automated Sorting Robotic Arm Shah R., Pandey A. B.*
Department of Mechanical Engineering, Faculty of Technology & Engineering, The Maharaja Sayajirao University of Baroda, Vadodara, Gujarat, India,
*[email protected] [email protected]
Abstract
Repetitive tasks and high accuracy have become the two contradictory needs of any industrial process. By introducing autonomous robotic applications, simple repetitive tasks can be accomplished keeping the demands of the accuracy and speed in mind. Nowadays in this fast growing industrial age every company needs speed in manufacturing to cope up with the customer’s requirements. The basic objective of our project is to develop a versatile and low cost robotic arm which can be utilized in any industry to eliminate this problem.
© 2017The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
Keywords:Robotic Arm; Automation; Sorting; Sensors; Motors
1. Introduction
A robotic arm is a robot manipulator, usually programmable, with similar functions to a human arm. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand. The end effector can be designed to perform any desired task such as welding, gripping, spinning etc.,
* Corresponding author. Tel.: +0-000-000-0000 ; fax: +0-000-000-0000 .
E-mail address:[email protected]
Available online at www.sciencedirect.com
ScienceDirect
Procedia Manufacturing 00 (2017) 000–000 www.elsevier.com/locate/procedia
2351-9789© 2017 The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
2nd International Conference on Materials Manufacturing and Design Engineering
Concept for Automated Sorting Robotic Arm Shah R., Pandey A. B.*
Department of Mechanical Engineering, Faculty of Technology & Engineering, The Maharaja Sayajirao University of Baroda, Vadodara, Gujarat, India,
*[email protected] [email protected]
Abstract
Repetitive tasks and high accuracy have become the two contradictory needs of any industrial process. By introducing autonomous robotic applications, simple repetitive tasks can be accomplished keeping the demands of the accuracy and speed in mind. Nowadays in this fast growing industrial age every company needs speed in manufacturing to cope up with the customer’s requirements. The basic objective of our project is to develop a versatile and low cost robotic arm which can be utilized in any industry to eliminate this problem.
© 2017The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
Keywords:Robotic Arm; Automation; Sorting; Sensors; Motors
1. Introduction
A robotic arm is a robot manipulator, usually programmable, with similar functions to a human arm. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand. The end effector can be designed to perform any desired task such as welding, gripping, spinning etc.,
* Corresponding author. Tel.: +0-000-000-0000 ; fax: +0-000-000-0000 .
E-mail address:[email protected]
2 Author name / Procedia Manufacturing 00 (2017) 000–000
depending on the application. Our robotic manipulator can be used in a number of applications by changing the program of controller. Moreover, by selecting appropriate capacity of motors, the arm will be capable to lift light loads (e.g. household applications), as well as heavy loads (e.g. industrial applications).
2. Design of Robotic Arm
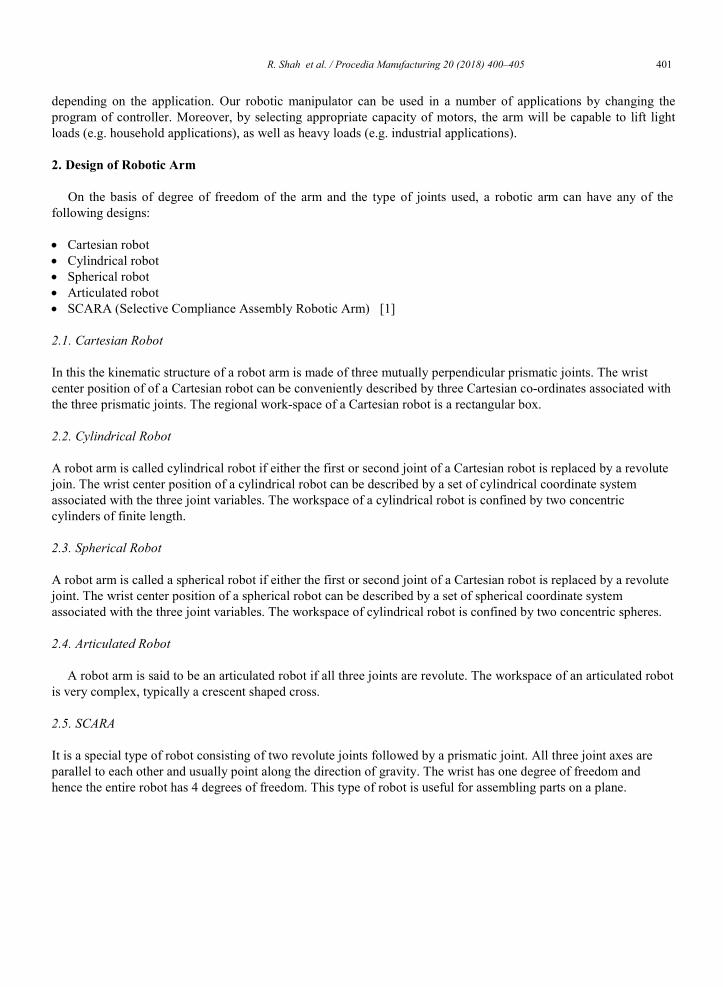
On the basis of degree of freedom of the arm and the type of joints used, a robotic arm can have any of the following designs:
Cartesian robot Cylindrical robot Spherical robot Articulated robot SCARA (Selective Compliance Assembly Robotic Arm) [1]
2.1. Cartesian Robot
In this the kinematic structure of a robot arm is made of three mutually perpendicular prismatic joints. The wrist center position of of a Cartesian robot can be conveniently described by three Cartesian co-ordinates associated with the three prismatic joints. The regional work-space of a Cartesian robot is a rectangular box.
2.2. Cylindrical Robot
A robot arm is called cylindrical robot if either the first or second joint of a Cartesian robot is replaced by a revolute join. The wrist center position of a cylindrical robot can be described by a set of cylindrical coordinate system associated with the three joint variables. The workspace of a cylindrical robot is confined by two concentric cylinders of finite length.
2.3. Spherical Robot
A robot arm is called a spherical robot if either the first or second joint of a Cartesian robot is replaced by a revolute joint. The wrist center position of a spherical robot can be described by a set of spherical coordinate system associated with the three joint variables. The workspace of cylindrical robot is confined by two concentric spheres.
2.4. Articulated Robot
A robot arm is said to be an articulated robot if all three joints are revolute. The workspace of an articulated robot is very complex, typically a crescent shaped cross.
2.5. SCARA
It is a special type of robot consisting of two revolute joints followed by a prismatic joint. All three joint axes are parallel to each other and usually point along the direction of gravity. The wrist has one degree of freedom and hence the entire robot has 4 degrees of freedom. This type of robot is useful for assembling parts on a plane.
R. Shah et al. / Procedia Manufacturing 20 (2018) 400–405 401
Available online at www.sciencedirect.com
ScienceDirect
Procedia Manufacturing 00 (2017) 000–000 www.elsevier.com/locate/procedia
2351-9789© 2017 The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
2nd International Conference on Materials Manufacturing and Design Engineering
Concept for Automated Sorting Robotic Arm Shah R., Pandey A. B.*
Department of Mechanical Engineering, Faculty of Technology & Engineering, The Maharaja Sayajirao University of Baroda, Vadodara, Gujarat, India,
*[email protected] [email protected]
Abstract
Repetitive tasks and high accuracy have become the two contradictory needs of any industrial process. By introducing autonomous robotic applications, simple repetitive tasks can be accomplished keeping the demands of the accuracy and speed in mind. Nowadays in this fast growing industrial age every company needs speed in manufacturing to cope up with the customer’s requirements. The basic objective of our project is to develop a versatile and low cost robotic arm which can be utilized in any industry to eliminate this problem.
© 2017The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
Keywords:Robotic Arm; Automation; Sorting; Sensors; Motors
1. Introduction
A robotic arm is a robot manipulator, usually programmable, with similar functions to a human arm. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand. The end effector can be designed to perform any desired task such as welding, gripping, spinning etc.,
* Corresponding author. Tel.: +0-000-000-0000 ; fax: +0-000-000-0000 .
E-mail address:[email protected]
Available online at www.sciencedirect.com
ScienceDirect
Procedia Manufacturing 00 (2017) 000–000 www.elsevier.com/locate/procedia
2351-9789© 2017 The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
2nd International Conference on Materials Manufacturing and Design Engineering
Concept for Automated Sorting Robotic Arm Shah R., Pandey A. B.*
Department of Mechanical Engineering, Faculty of Technology & Engineering, The Maharaja Sayajirao University of Baroda, Vadodara, Gujarat, India,
*[email protected] [email protected]
Abstract
Repetitive tasks and high accuracy have become the two contradictory needs of any industrial process. By introducing autonomous robotic applications, simple repetitive tasks can be accomplished keeping the demands of the accuracy and speed in mind. Nowadays in this fast growing industrial age every company needs speed in manufacturing to cope up with the customer’s requirements. The basic objective of our project is to develop a versatile and low cost robotic arm which can be utilized in any industry to eliminate this problem.
© 2017The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
Keywords:Robotic Arm; Automation; Sorting; Sensors; Motors
1. Introduction
A robotic arm is a robot manipulator, usually programmable, with similar functions to a human arm. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand. The end effector can be designed to perform any desired task such as welding, gripping, spinning etc.,
* Corresponding author. Tel.: +0-000-000-0000 ; fax: +0-000-000-0000 .
E-mail address:[email protected]
Available online at www.sciencedirect.com
ScienceDirect
Procedia Manufacturing 00 (2017) 000–000 www.elsevier.com/locate/procedia
2351-9789© 2017 The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
2nd International Conference on Materials Manufacturing and Design Engineering
Concept for Automated Sorting Robotic Arm Shah R., Pandey A. B.*
Department of Mechanical Engineering, Faculty of Technology & Engineering, The Maharaja Sayajirao University of Baroda, Vadodara, Gujarat, India,
*[email protected] [email protected]
Abstract
Repetitive tasks and high accuracy have become the two contradictory needs of any industrial process. By introducing autonomous robotic applications, simple repetitive tasks can be accomplished keeping the demands of the accuracy and speed in mind. Nowadays in this fast growing industrial age every company needs speed in manufacturing to cope up with the customer’s requirements. The basic objective of our project is to develop a versatile and low cost robotic arm which can be utilized in any industry to eliminate this problem.
© 2017The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
Keywords:Robotic Arm; Automation; Sorting; Sensors; Motors
1. Introduction
A robotic arm is a robot manipulator, usually programmable, with similar functions to a human arm. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand. The end effector can be designed to perform any desired task such as welding, gripping, spinning etc.,
* Corresponding author. Tel.: +0-000-000-0000 ; fax: +0-000-000-0000 .
E-mail address:[email protected]
Available online at www.sciencedirect.com
ScienceDirect
Procedia Manufacturing 00 (2017) 000–000 www.elsevier.com/locate/procedia
2351-9789© 2017 The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
2nd International Conference on Materials Manufacturing and Design Engineering
Concept for Automated Sorting Robotic Arm Shah R., Pandey A. B.*
Department of Mechanical Engineering, Faculty of Technology & Engineering, The Maharaja Sayajirao University of Baroda, Vadodara, Gujarat, India,
*[email protected] [email protected]
Abstract
Repetitive tasks and high accuracy have become the two contradictory needs of any industrial process. By introducing autonomous robotic applications, simple repetitive tasks can be accomplished keeping the demands of the accuracy and speed in mind. Nowadays in this fast growing industrial age every company needs speed in manufacturing to cope up with the customer’s requirements. The basic objective of our project is to develop a versatile and low cost robotic arm which can be utilized in any industry to eliminate this problem.
© 2017The Authors. Published by Elsevier B.V. Peer-review under responsibility of the scientific committee of the 2nd International Conference on Materials Manufacturing and Design Engineering.
Keywords:Robotic Arm; Automation; Sorting; Sensors; Motors
1. Introduction
A robotic arm is a robot manipulator, usually programmable, with similar functions to a human arm. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand. The end effector can be designed to perform any desired task such as welding, gripping, spinning etc.,
* Corresponding author. Tel.: +0-000-000-0000 ; fax: +0-000-000-0000 .
E-mail address:[email protected]
2 Author name / Procedia Manufacturing 00 (2017) 000–000
depending on the application. Our robotic manipulator can be used in a number of applications by changing the program of controller. Moreover, by selecting appropriate capacity of motors, the arm will be capable to lift light loads (e.g. household applications), as well as heavy loads (e.g. industrial applications).
2. Design of Robotic Arm
On the basis of degree of freedom of the arm and the type of joints used, a robotic arm can have any of the following designs:
Cartesian robot Cylindrical robot Spherical robot Articulated robot SCARA (Selective Compliance Assembly Robotic Arm) [1]
2.1. Cartesian Robot
In this the kinematic structure of a robot arm is made of three mutually perpendicular prismatic joints. The wrist center position of of a Cartesian robot can be conveniently described by three Cartesian co-ordinates associated with the three prismatic joints. The regional work-space of a Cartesian robot is a rectangular box.
2.2. Cylindrical Robot
A robot arm is called cylindrical robot if either the first or second joint of a Cartesian robot is replaced by a revolute join. The wrist center position of a cylindrical robot can be described by a set of cylindrical coordinate system associated with the three joint variables. The workspace of a cylindrical robot is confined by two concentric cylinders of finite length.
2.3. Spherical Robot
A robot arm is called a spherical robot if either the first or second joint of a Cartesian robot is replaced by a revolute joint. The wrist center position of a spherical robot can be described by a set of spherical coordinate system associated with the three joint variables. The workspace of cylindrical robot is confined by two concentric spheres.
2.4. Articulated Robot
A robot arm is said to be an articulated robot if all three joints are revolute. The workspace of an articulated robot is very complex, typically a crescent shaped cross.
2.5. SCARA
It is a special type of robot consisting of two revolute joints followed by a prismatic joint. All three joint axes are parallel to each other and usually point along the direction of gravity. The wrist has one degree of freedom and hence the entire robot has 4 degrees of freedom. This type of robot is useful for assembling parts on a plane.
402 R. Shah et al. / Procedia Manufacturing 20 (2018) 400–405 Author name / Procedia Manufacturing 00 (2017) 000–000 3
Fig. 1. Types of robotic arms
3. Microcontroller
A highly integrated chip that contains all the components comprises a Controller. Typically this includes a CPU, RAM, some form of ROM, I/O ports, and timers. Unlike a general-purpose computer, which also includes all of these components, a micro controller is designed for a very specific task -- to control a particular system. As a result, the parts can be simplified and reduced, which cuts down on production costs. [2] Microcontrollers are sometimes called embedded micro controllers, which just means that they are part of an embedded system -- that is, one part of a larger device or system
3.1. Microcontrollers used in similar applications
PLC, which was used for controlling and handling all processes in “Automatic Sorting Machine using Delta PLC” [3], by Babita Nanda.
Arduino Uno, used for controlling the system in “Object Sorting using Color Sensor and Arduino”. [4] Atmega of the Atmel corp, used in “Automatic Sorting System using Machine Vision”. [5]
Here, for this concept, Arduino Uno microcontroller is considered, as it provides the optimum processing capabilities required to handle the components mentioned in this project, while simultaneously avoiding the complexities existing in other high-grade controllers.
Arduino/Genuino Uno is a microcontroller board based on the ATmega328P. It has 14 digital input/output pins (of which 6 can be used as PWM outputs), 6 analog inputs, a 16 MHz quartz crystal, a USB connection, a power jack, an ICSP header and a reset button. It contains everything needed to support the microcontroller; simply connect it to a computer with a USB cable or power it with a AC-to- DC adapter or battery to get started. [6]
4 Author name / Procedia Manufacturing 00 (2017) 000–000
Fig. 2. Arduino Uno R3 Controller
4. Radar
Many other sorting machines have been built using Machine Vision[5] as medium for detecting the location and shape of the object, but this increases complexity of the system. Instead, the purpose of detecting the object in our project can be accomplished by using a radar system.
Radar can be constructed by mounting an ultrasonic sensor on a servo motor, which will return polar coordinates of any object detected in its vicinity. [7] 4.1. Ultrasonic Sensor
Ultrasonic sensors are transducers that convert ultrasonic waves to electrical signals or vice versa. Those that both transmit and receive these waves are called ultrasound transceivers.
These devices work on a principle similar to that of transducers used in radar and sonar systems, which evaluate attributes of a target by interpreting the echoes from radio or sound waves, respectively.
5. Sorting Hardware
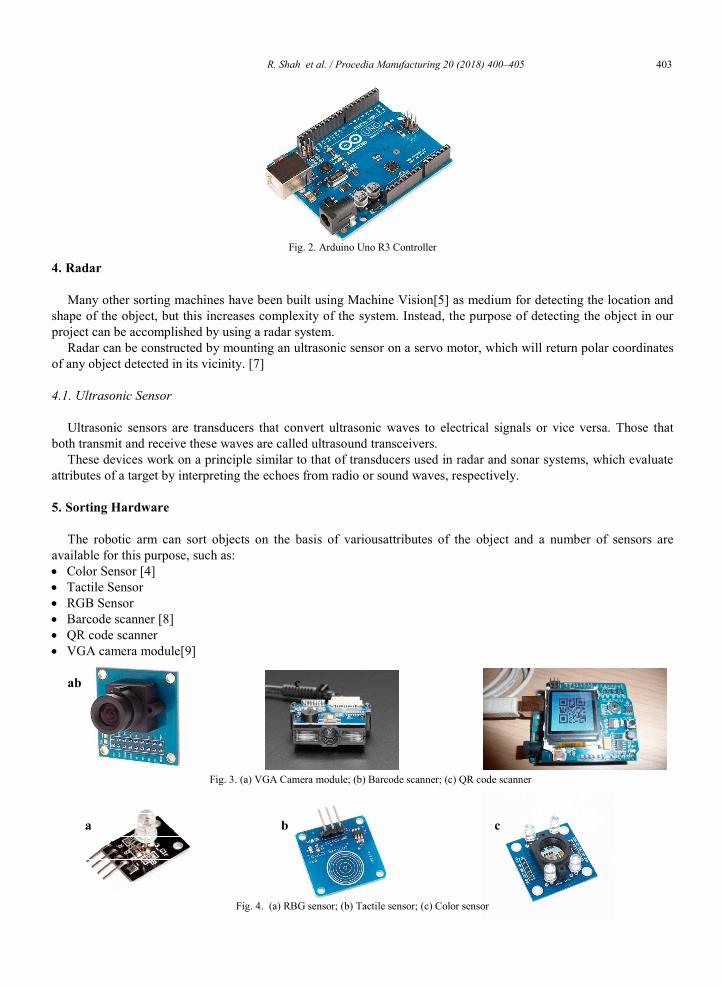
The robotic arm can sort objects on the basis of variousattributes of the object and a number of sensors are available for this purpose, such as: Color Sensor [4] Tactile Sensor RGB Sensor Barcode scanner [8] QR code scanner VGA camera module[9]
ab c
Fig. 3. (a) VGA Camera module; (b) Barcode scanner; (c) QR code scanner
a b c
Fig. 4. (a) RBG sensor; (b) Tactile sensor; (c) Color sensor
R. Shah et al. / Procedia Manufacturing 20 (2018) 400–405 403 Author name / Procedia Manufacturing 00 (2017) 000–000 3
Fig. 1. Types of robotic arms
3. Microcontroller
A highly integrated chip that contains all the components comprises a Controller. Typically this includes a CPU, RAM, some form of ROM, I/O ports, and timers. Unlike a general-purpose computer, which also includes all of these components, a micro controller is designed for a very specific task -- to control a particular system. As a result, the parts can be simplified and reduced, which cuts down on production costs. [2] Microcontrollers are sometimes called embedded micro controllers, which just means that they are part of an embedded system -- that is, one part of a larger device or system
3.1. Microcontrollers used in similar applications
PLC, which was used for controlling and handling all processes in “Automatic Sorting Machine using Delta PLC” [3], by Babita Nanda.
Arduino Uno, used for controlling the system in “Object Sorting using Color Sensor and Arduino”. [4] Atmega of the Atmel corp, used in “Automatic Sorting System using Machine Vision”. [5]
Here, for this concept, Arduino Uno microcontroller is considered, as it provides the optimum processing capabilities required to handle the components mentioned in this project, while simultaneously avoiding the complexities existing in other high-grade controllers.
Arduino/Genuino Uno is a microcontroller board based on the ATmega328P. It has 14 digital input/output pins (of which 6 can be used as PWM outputs), 6 analog inputs, a 16 MHz quartz crystal, a USB connection, a power jack, an ICSP header and a reset button. It contains everything needed to support the microcontroller; simply connect it to a computer with a USB cable or power it with a AC-to- DC adapter or battery to get started. [6]
4 Author name / Procedia Manufacturing 00 (2017) 000–000
Fig. 2. Arduino Uno R3 Controller
4. Radar
Many other sorting machines have been built using Machine Vision[5] as medium for detecting the location and shape of the object, but this increases complexity of the system. Instead, the purpose of detecting the object in our project can be accomplished by using a radar system.
Radar can be constructed by mounting an ultrasonic sensor on a servo motor, which will return polar coordinates of any object detected in its vicinity. [7] 4.1. Ultrasonic Sensor
Ultrasonic sensors are transducers that convert ultrasonic waves to electrical signals or vice versa. Those that both transmit and receive these waves are called ultrasound transceivers.
These devices work on a principle similar to that of transducers used in radar and sonar systems, which evaluate attributes of a target by interpreting the echoes from radio or sound waves, respectively.
5. Sorting Hardware
The robotic arm can sort objects on the basis of variousattributes of the object and a number of sensors are available for this purpose, such as: Color Sensor [4] Tactile Sensor RGB Sensor Barcode scanner [8] QR code scanner VGA camera module[9]
ab c
Fig. 3. (a) VGA Camera module; (b) Barcode scanner; (c) QR code scanner
a b c
Fig. 4. (a) RBG sensor; (b) Tactile sensor; (c) Color sensor
404 R. Shah et al. / Procedia Manufacturing 20 (2018) 400–405 Author name / Procedia Manufacturing 00 (2017) 000–000 5
6. Actuators
Most of the projects working on sorting function use conveyors [4][5] operating on DC motors for transferring the objects from one location to another, along with some sensors to provide a feedback loop. But our project utilizes a robotic arm for lifting the object (whose initial position may not be fixed), which requires high accuracy. For this purpose, using servo motors at the robotic arm’s joint is the most effective solution.
A servomotor is a rotary actuator or linear actuator that allows for precise control of angular or linear position, velocity and acceleration. It consists of a suitable motor coupled to a sensor for position feedback. It also requires arelatively sophisticated controller, often a dedicated module designedspecifically for use with servomotors.
Basically, servo motors are classified into AC and DC servo motors dependingupon the nature of supply. [10]
6.1. DC Servo Motors
A DC servo motor consists of a small DC motor, feedback potentiometer, gearbox, motor drive electronic circuit and electronic feedback control loop. It is more or less similar to the normal DC motor.
6.2. AC Servo Motors
AC servo motors are basically two-phase squirrel cage induction motors and are used for low power applications. Nowadays, three phase squirrel cage induction motors have been modified such that they can be used in high power servo systems.
7. Additional features
7.1. Automatic Guided Vehicle (AGV)
The robotic arm can be mounted on an Automatic guided vehicle so that the arm can move towards out of reach objects
7.2. Manual or Automatic Control
The arm can be programmed to function automatically on its own or also manually by using hand held remote based on the requirement of the task.
7.3. End effectors
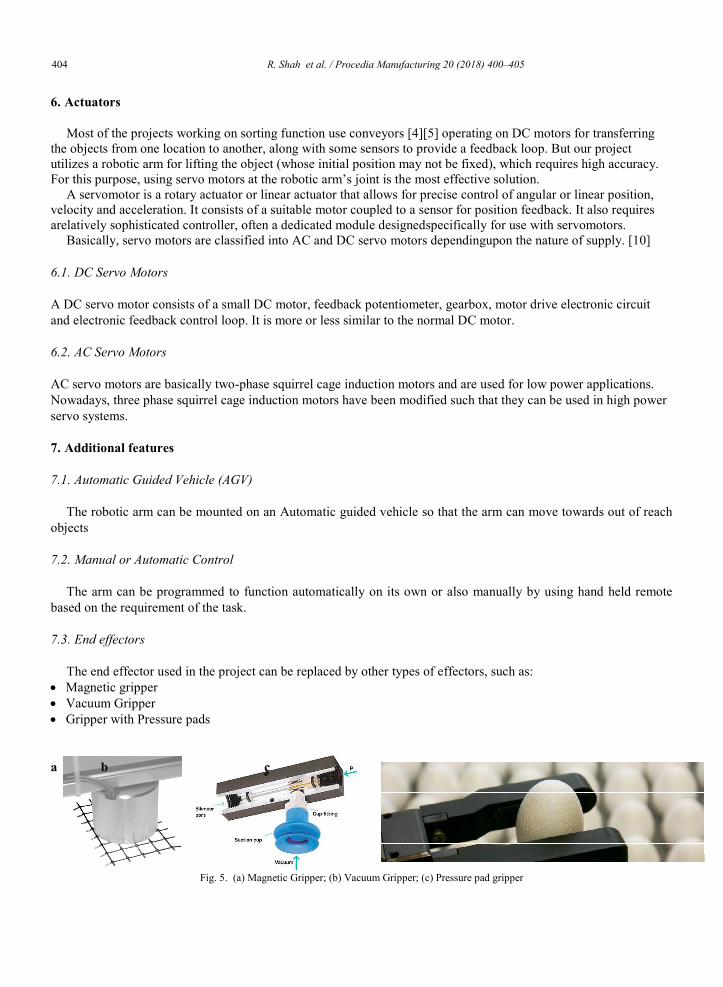
The end effector used in the project can be replaced by other types of effectors, such as: Magnetic gripper Vacuum Gripper Gripper with Pressure pads
a b c
Fig. 5. (a) Magnetic Gripper; (b) Vacuum Gripper; (c) Pressure pad gripper
6 Author name / Procedia Manufacturing
7.4. Scaling of the project
We can adapt the project to large scale applications by using higher capacity motors and better & faster microcontrollers.
7.5. Smart Functionality
The project can also be programmed to react to vocal commands as well as give vocal feedbacks, by incorporating microphone, speaker and other appropriate hardware 7.6. Wireless Communication
A Bluetooth module (like HC05) [9] can be incorporated in the project to provide a wireless communication feature to send commands and receive feedbacks from the system.
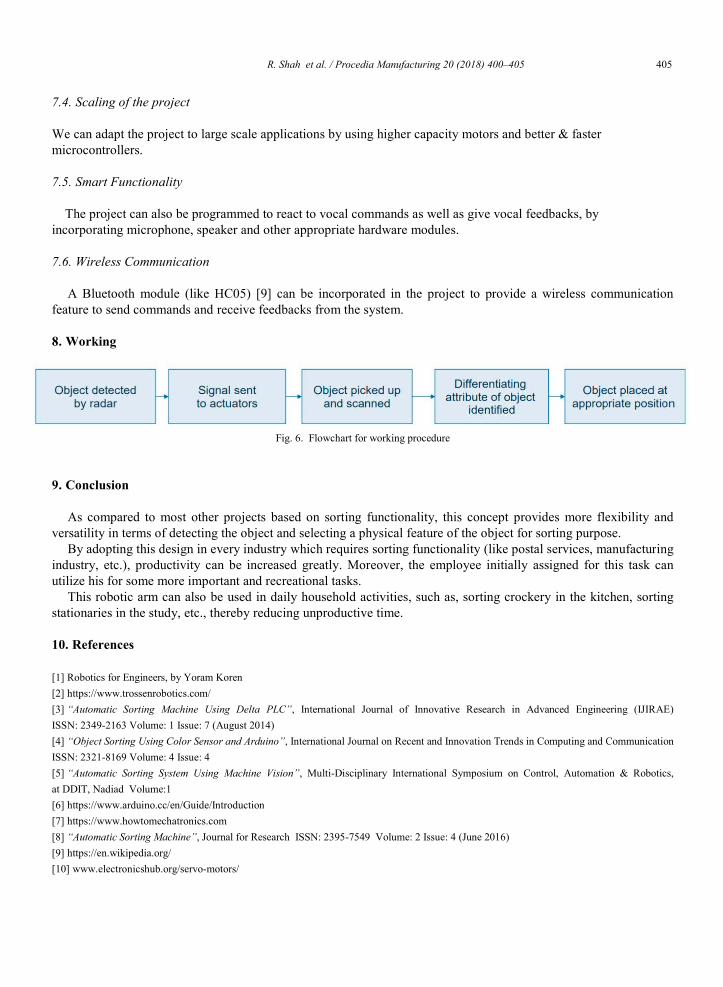
8. Working
Fig. 6. Flowchart for working procedure
9. Conclusion
As compared to most other projects based on sortversatility in terms of detecting the object and selecting a physical feature of
By adopting this design in every industry which requires sorting functionalityindustry, etc.), productivity can be increased greatlyutilize his for some more important and recreational tasks.
This robotic arm can also be used in daily household activities, such as, sostationaries in the study, etc., thereby reducing unproductive time.
10. References
[1] Robotics for Engineers, by Yoram Koren [2] https://www.trossenrobotics.com/ [3] “Automatic Sorting Machine Using Delta PLC”, International Journal of Innovative Research in Advanced Engineering (IJIISSN: 2349-2163 Volume: 1 Issue: 7 (August 2014) [4] “Object Sorting Using Color Sensor and Arduino”, International Journal on Recent and InnovatioISSN: 2321-8169 Volume: 4 Issue: 4 [5] “Automatic Sorting System Using Machine Vision”, Multiat DDIT, Nadiad Volume:1 [6] https://www.arduino.cc/en/Guide/Introduction [7] https://www.howtomechatronics.com [8] “Automatic Sorting Machine”, Journal for Research ISSN: 2395[9] https://en.wikipedia.org/ [10] www.electronicshub.org/servo-motors/
Procedia Manufacturing 00 (2017) 000–000
We can adapt the project to large scale applications by using higher capacity motors and better & faster
The project can also be programmed to react to vocal commands as well as give vocal feedbacks, by appropriate hardware modules.
A Bluetooth module (like HC05) [9] can be incorporated in the project to provide a wireless communication feature to send commands and receive feedbacks from the system.
Fig. 6. Flowchart for working procedure
As compared to most other projects based on sorting functionality, this concept provides more flexibility and versatility in terms of detecting the object and selecting a physical feature of the object for sorting purpose.
adopting this design in every industry which requires sorting functionality (like postal services, manufactur, productivity can be increased greatly. Moreover, the employee initially assigned for this task can
utilize his for some more important and recreational tasks. This robotic arm can also be used in daily household activities, such as, sorting crockery in the kitchen, sorting
reducing unproductive time.
, International Journal of Innovative Research in Advanced Engineering (IJI
, International Journal on Recent and Innovation Trends in Computing and Communication
, Multi-Disciplinary International Symposium on Control, Automation & Robotics,
, Journal for Research ISSN: 2395-7549 Volume: 2 Issue: 4 (June 2016)
A Bluetooth module (like HC05) [9] can be incorporated in the project to provide a wireless communication
provides more flexibility and the object for sorting purpose.
(like postal services, manufacturing . Moreover, the employee initially assigned for this task can
rting crockery in the kitchen, sorting
, International Journal of Innovative Research in Advanced Engineering (IJIRAE)
n Trends in Computing and Communication
Disciplinary International Symposium on Control, Automation & Robotics,
R. Shah et al. / Procedia Manufacturing 20 (2018) 400–405 405 Author name / Procedia Manufacturing 00 (2017) 000–000 5
6. Actuators
Most of the projects working on sorting function use conveyors [4][5] operating on DC motors for transferring the objects from one location to another, along with some sensors to provide a feedback loop. But our project utilizes a robotic arm for lifting the object (whose initial position may not be fixed), which requires high accuracy. For this purpose, using servo motors at the robotic arm’s joint is the most effective solution.
A servomotor is a rotary actuator or linear actuator that allows for precise control of angular or linear position, velocity and acceleration. It consists of a suitable motor coupled to a sensor for position feedback. It also requires arelatively sophisticated controller, often a dedicated module designedspecifically for use with servomotors.
Basically, servo motors are classified into AC and DC servo motors dependingupon the nature of supply. [10]
6.1. DC Servo Motors
A DC servo motor consists of a small DC motor, feedback potentiometer, gearbox, motor drive electronic circuit and electronic feedback control loop. It is more or less similar to the normal DC motor.
6.2. AC Servo Motors
AC servo motors are basically two-phase squirrel cage induction motors and are used for low power applications. Nowadays, three phase squirrel cage induction motors have been modified such that they can be used in high power servo systems.
7. Additional features
7.1. Automatic Guided Vehicle (AGV)
The robotic arm can be mounted on an Automatic guided vehicle so that the arm can move towards out of reach objects
7.2. Manual or Automatic Control
The arm can be programmed to function automatically on its own or also manually by using hand held remote based on the requirement of the task.
7.3. End effectors
The end effector used in the project can be replaced by other types of effectors, such as: Magnetic gripper Vacuum Gripper Gripper with Pressure pads
a b c
Fig. 5. (a) Magnetic Gripper; (b) Vacuum Gripper; (c) Pressure pad gripper
6 Author name / Procedia Manufacturing
7.4. Scaling of the project
We can adapt the project to large scale applications by using higher capacity motors and better & faster microcontrollers.
7.5. Smart Functionality
The project can also be programmed to react to vocal commands as well as give vocal feedbacks, by incorporating microphone, speaker and other appropriate hardware 7.6. Wireless Communication
A Bluetooth module (like HC05) [9] can be incorporated in the project to provide a wireless communication feature to send commands and receive feedbacks from the system.
8. Working
Fig. 6. Flowchart for working procedure
9. Conclusion
As compared to most other projects based on sortversatility in terms of detecting the object and selecting a physical feature of
By adopting this design in every industry which requires sorting functionalityindustry, etc.), productivity can be increased greatlyutilize his for some more important and recreational tasks.
This robotic arm can also be used in daily household activities, such as, sostationaries in the study, etc., thereby reducing unproductive time.
10. References
[1] Robotics for Engineers, by Yoram Koren [2] https://www.trossenrobotics.com/ [3] “Automatic Sorting Machine Using Delta PLC”, International Journal of Innovative Research in Advanced Engineering (IJIISSN: 2349-2163 Volume: 1 Issue: 7 (August 2014) [4] “Object Sorting Using Color Sensor and Arduino”, International Journal on Recent and InnovatioISSN: 2321-8169 Volume: 4 Issue: 4 [5] “Automatic Sorting System Using Machine Vision”, Multiat DDIT, Nadiad Volume:1 [6] https://www.arduino.cc/en/Guide/Introduction [7] https://www.howtomechatronics.com [8] “Automatic Sorting Machine”, Journal for Research ISSN: 2395[9] https://en.wikipedia.org/ [10] www.electronicshub.org/servo-motors/
Procedia Manufacturing 00 (2017) 000–000
We can adapt the project to large scale applications by using higher capacity motors and better & faster
The project can also be programmed to react to vocal commands as well as give vocal feedbacks, by appropriate hardware modules.
A Bluetooth module (like HC05) [9] can be incorporated in the project to provide a wireless communication feature to send commands and receive feedbacks from the system.
Fig. 6. Flowchart for working procedure
As compared to most other projects based on sorting functionality, this concept provides more flexibility and versatility in terms of detecting the object and selecting a physical feature of the object for sorting purpose.
adopting this design in every industry which requires sorting functionality (like postal services, manufactur, productivity can be increased greatly. Moreover, the employee initially assigned for this task can
utilize his for some more important and recreational tasks. This robotic arm can also be used in daily household activities, such as, sorting crockery in the kitchen, sorting
reducing unproductive time.
, International Journal of Innovative Research in Advanced Engineering (IJI
, International Journal on Recent and Innovation Trends in Computing and Communication
, Multi-Disciplinary International Symposium on Control, Automation & Robotics,
, Journal for Research ISSN: 2395-7549 Volume: 2 Issue: 4 (June 2016)
A Bluetooth module (like HC05) [9] can be incorporated in the project to provide a wireless communication
provides more flexibility and the object for sorting purpose.
(like postal services, manufacturing . Moreover, the employee initially assigned for this task can
rting crockery in the kitchen, sorting
, International Journal of Innovative Research in Advanced Engineering (IJIRAE)
n Trends in Computing and Communication
Disciplinary International Symposium on Control, Automation & Robotics,