calculation of solitary wave shoaling on plane beaches by extended boussinesq equations
TRANSCRIPT

Engineering Applications of Computational Fluid Mechanics Vol. 6, No. 1, pp. 25–38 (2012)
Received: 16 Jan. 2011; Revised: 23 Jul. 2011; Accepted: 9 Aug. 2011
25
CALCULATION OF SOLITARY WAVE SHOALING ON PLANE
BEACHES BY EXTENDED BOUSSINESQ EQUATIONS
Parviz Ghadimi *, Mohammad Hadi Jabbari and Arsham Reisinezhad
Department of Marine technology, Amirkabir University of Technology, Teheran, Iran
* E-Mail: [email protected] (Corresponding Author)
ABSTRACT: In this study, shoaling phenomenon is analyzed using Galerkin finite element approach. This
numerical scheme is applied to the extended Boussinesq equations derived by Beji and Nadaoka (1996) for
simulation of shoaling on plane beaches. For spatial discretization, quadratic elements with three-station Lagrange
interpolation polynomials are used for horizontal velocity and the water surface elevation. However, for time
discretization, two different numerical schemes are used. The first method is a combination of semi-implicit schemes
with low-order backward finite difference for time integration and the second method is high-order Adam-
Bashforth-Moulton predictor-corrector strategy. Based on this numerical approach, shoaling phenomenon caused by
propagation of a solitary wave on sloped beaches is modeled and the results are compared with the available results
from the fully nonlinear potential flow model. Considering the fact that the extended Boussinesq equations are
affected by nonlinear effects, a non-dimensional parameter called “Asymmetric Parameter” is introduced. This
parameter expresses the effects of the travelled distance of the solitary wave as well as the relative wave height on
the resulting wave asymmetry. Finally, using this parameter, shoaling coefficient has been computed in an
appropriate range.
Keywords: shoaling coefficient, solitary waves, extended boussinesq equation, finite element approximation,
asymmetric parameter
1. INTRODUCTION
Boussinesq equations have been commonly used
to describe weakly nonlinear and weakly
dispersive properties of wave propagation in
shallow waters. These equations include the low-
order effect of frequency dispersion and
nonlinearity. Nonlinear effect is denoted by the
ratio of wave amplitude to the water depth
(δ=𝜂0/h0) and frequency dispersion is defined by
the square of the ratio of water depth to
wavelength, i.e. μ2= (h0/L0)
2. In Boussinesq
equations, the dependent variables can be
identified in different ways and typical velocity
variables include the surface velocity, the bottom
velocity, the depth-averaged velocity, the velocity
at an arbitrary depth, and the depth-integrated
velocity, as expressed by Madsen and Sorensen
(1992).
Standard Boussinesq equations for variable water
depth derived by peregrine (1967) are based on
the assumptions of δ<< 1 and μ<< 1 and has good
linear accuracy up to 𝑘 ≈ 0.75 (k is the wave
number). Linearized dispersion property of the
standard Boussinesq equations has been
drastically improved and can even be applied to
relatively deep water, i.e. for the range of 𝑘 ≤ 3,
in which case, they are known as extended
Boussinesq equations. Extended form of
Boussinesq equations with improved dispersive
properties of the equations have been derived by
Madsen et al. (1991), Nwogu (1993), and Beji
and Nadaoka (1996). Madsen et al. (1991)
introduced some higher-order terms in the
momentum equations which were conventionally
neglected in the process of deriving the
Boussinesq equations. Nwogu (1993) derived an
alternative form of the Boussinesq equations from
the continuity equation and Euler’s equations of
motion. He used the velocity at a certain depth as
a dependent variable. Beji and Nadaoka (1996),
by a simple algebraic manipulation of the
Peregrine’s original equation, designed a
particular form of extended Boussinesq equations.
Ouahsine et al. (2008) also presented an extended
Boussinesq model based on the spectral approach
of the finite element method to improve the
dispersion relationship of the wave propagation in
deeper water.
Until now, there does not appear to be any case
where the dispersion and asymmetry of the
solitary wave propagation over sloped beaches
have been considered or addressed by any type of
Boussinesq equations. For this reason, in the
current study, Beji and Nadaoka (1996)
Boussinesq equations are applied for the
Engineering Applications of Computational Fluid Mechanics Vol. 6, No. 1 (2012)
26
simulation of wave shoaling on slopes where
nonlinearity increases for waves near the breaking
point. However, unlike the fully nonlinear and
dispersive models (Wei et al., 1995; Gobbi et al.,
2000; Madsen et al., 2002; Lynett and Liu, 2004;
Li, 2008; Karambas and Memos, 2009), the
extended Boussinesq equations does not model
the extreme nonlinearity effects near the wave
breaking region, thus determination of a suitable
or reliable range for application of these equations
becomes imperative. Accordingly, in the current
study, using the extended Boussinesq equations,
the propagation of solitary waves over sloped
beaches (gentle (<1:35) and steep (≤1:8) slopes)
are simulated until their breaking points.
Subsequently, by applying different numerical
methods and introducing different wave
geometric parameters, which will be later
identified as asymmetric parameter, an effort will
be made to determine the applicability range of
these equations. As pointed out earlier, due to the
type of depth averaging performed to derive the
Boussinesq equations, these equations are not
capable of modeling wave breaking. Therefore,
much effort has been devoted to develop the
Boussinesq equations. Schäffer et al. (1993)
incorporated a simple description of water wave
breaking in shallow water into the Boussinesq
equations by using the concept of surface roller.
The effect of the roller was included in the
vertical distribution of the horizontal velocity,
which leads to an additional convective
momentum term. The initiation or cessation of
breaking is governed by the maximum surface
slope at each wave front. Kennedy et al. (2000)
used a momentum-conserving eddy viscosity
technique to model the breaking by the
Boussinesq equations. They performed shoaling
and breaking tests involving regular waves. Eddy
viscosity formulation may have some difficulties
in simultaneously providing reliable predictions
of wave heights and horizontal asymmetries in the
inner surf zone. Hirayama and Hara (2003)
presented a wave breaking model that does not
depend on the bottom slope and introduced a
judging function. As part of their model, vertical
water pressure gradient decreases at the wave
breaking point. This model, however, cannot
reproduce the wave breaking on a gentle slope.
Tonelli and Petti (2009) provided coupled
solution of Boussinesq equations and nonlinear
sallow water equations (NSWE) under waves’
physical behavior effects when they move into
shallow water areas and where dispersive terms
become negligible compared to nonlinear terms.
They conducted numerical investigation on
regular wave breaking on a gently sloping beach.
Cienfuegos et al. (2010) developed a new wave-
breaking model for Boussinesq type equations.
They included roller effects in the mass
conservation equation to model the breaking
wave. Their model was also applied to the solitary
wave breaking on a beach.
The above presented methods have also, in recent
years, been applied to other cases to some extent
and among them are the work done by
Orszaghova et al. (2010) and Tonelli and Petti
(2011). In the present numerical study, two
coupled finite element schemes have been utilized
to predict the height of solitary wave propagation
over sloped beaches in a way that the presence of
diffusion terms in the Boussinesq equations is
avoided. Also, in addition to introducing an
asymmetric parameter, the wave geometrical
profile has been used to determine the critical
region of wave breaking.
In recent years, Boussinesq equations have been
solved using finite element schemes by many
researchers; Taylor-Galerkin method by Ambrosi
and Quartapelle (1998), Galerkin technique using
linear elements by Kawahara and Cheng (1994),
Langtangen and Pedersen (1996), Li et al. (1999),
Walkley and Berzins (1999 and 2002), Sørensen
et al. (2004), Zaho et al. (2004) and Ghadimi et al.
(2011), Galerkin technique using high-order
elements by Antunes Do Carmo et al. (1993) and
Langtangen and Pedersen (1998), Petrov-Galerkin
scheme by Woo and Liu (2001) and Avilez-
Valente and Seabra-Santos (2008), and
discontinuous Galerkin method by Engsig-Karup
et al. (2006) are among the most significant works
that can be cited. In this paper, a standard
Galerkin finite element method is applied for
modeling the shoaling phenomena of a solitary
wave.
Similar to the existing numerical methods for
discretization of the spatial terms in Boussinesq
equations, there are several schemes for
discretization of the temporal terms in these
equations. During the developing period of the
Boussinesq equations, various numerical
techniques have been used for time discretizaion
along with spatial discretization. Implementation
of different methods of time discretization have
been done primarily for the purpose of achieving
numerical stability over time as such that the
simulation stays stable for a longer period. Thus,
based on the method of discretization of spatial
terms, the discretization technique of time terms
becomes important, too. Research shows that over
the developing period of Boussinesq equations,
usage of lower order time schemes can cause non-
Engineering Applications of Computational Fluid Mechanics Vol. 6, No. 1 (2012)
27
physical dispersion. For instance, Kawahara and
Cheng (1994) used a simple explicit
approximation in time along with their finite
element scheme. Langtangen and Pedersen (1996)
used a staggered time integration scheme which
allowed them to solve each Boussinesq equation
sequentially rather than in a coupled form.
However, in a subsequent paper (Langtangen and
Pederson, 1998) correction terms to increase the
time accuracy were included to eliminate any
non-physical dispersion.
Wei and Kirby (1995), using a finite difference
technique to model the Nwogu equations, showed
that the application of a fourth order Adams-
Bashforth can substantially reduce the error
associated with non-physical dispersion. Since
then, this approach to integration of the
discretized terms of Boussinesq equations over
time took more notice by researchers. Examples
of this can be seen in the works done by
researchers (Li et al., 1999; Bellotti and
Brocchini, 2001; Hsu et al., 2002, Zhao et al.,
2004; Lin and Man, 2007).
In this paper, one dimensional quadratic elements
with three-station Lagrange interpolation
polynomials are used for spatial discretization of
horizontal velocity and the water surface
elevation. However, for time discretization, two
different numerical schemes are used. The first
method is a combination of semi-implicit schemes
with low-order backward finite difference for
time integration while the second method is a
high-order Adam-Bashforth-Moulton predictor-
corrector strategy.
Results of the computations performed by the
developed code are compared against the
numerical findings of Grilli et al. (1989) which is
based on the fully nonlinear potential flow model
(FNPF(. This model has been extensively tested
against the laboratory data for the case of shoaling
and breaking of the solitary waves by Grilli et al.
(1994) that strikingly has close agreement with
the measured data and thus can be considered as a
reliable source for comparison.
Even though using a time integration method can
cause a reducation in wave height during its
propagation, but in this particular case study (i.e.
determination of shoaling coefficient of the
solitary waves propagating over sloped beaches)
in which propagation time is not too large,
combining this scheme with other high order
terms of time has produced interesting results
which are discussed later in the paper.
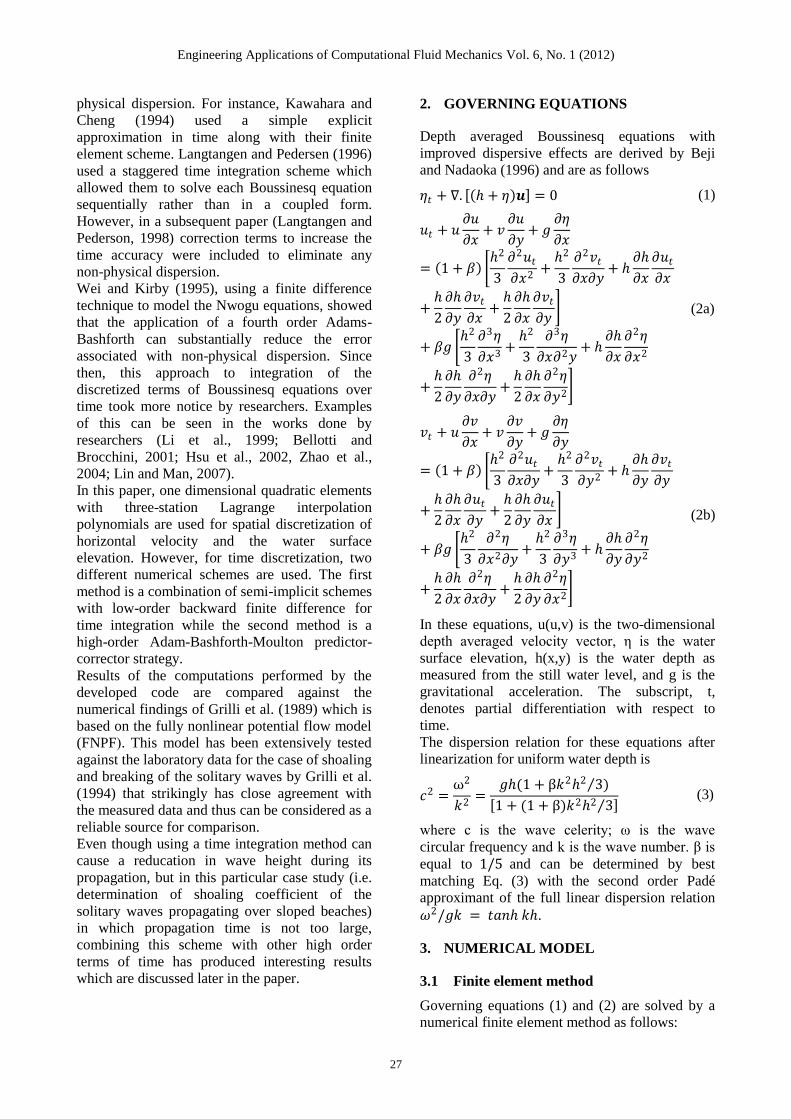
2. GOVERNING EQUATIONS
Depth averaged Boussinesq equations with
improved dispersive effects are derived by Beji
and Nadaoka (1996) and are as follows
𝜂𝑡 + ∇. + 𝜂 𝒖 = 0 (1)
𝑢𝑡 + 𝑢𝜕𝑢
𝜕𝑥+ 𝑣
𝜕𝑢
𝜕𝑦+ 𝑔
𝜕𝜂
𝜕𝑥
= 1 + 𝛽 2
3
𝜕2𝑢𝑡
𝜕𝑥2+
2
3
𝜕2𝑣𝑡
𝜕𝑥𝜕𝑦+
𝜕
𝜕𝑥
𝜕𝑢𝑡
𝜕𝑥
+
2
𝜕
𝜕𝑦
𝜕𝑣𝑡
𝜕𝑥+
2
𝜕
𝜕𝑥
𝜕𝑣𝑡
𝜕𝑦
+ 𝛽𝑔 2
3
𝜕3𝜂
𝜕𝑥3+
2
3
𝜕3𝜂
𝜕𝑥𝜕2𝑦+
𝜕
𝜕𝑥
𝜕2𝜂
𝜕𝑥2
+
2
𝜕
𝜕𝑦
𝜕2𝜂
𝜕𝑥𝜕𝑦+
2
𝜕
𝜕𝑥
𝜕2𝜂
𝜕𝑦2
(2a)
𝑣𝑡 + 𝑢𝜕𝑣
𝜕𝑥+ 𝑣
𝜕𝑣
𝜕𝑦+ 𝑔
𝜕𝜂
𝜕𝑦
= 1 + 𝛽 2
3
𝜕2𝑢𝑡
𝜕𝑥𝜕𝑦+
2
3
𝜕2𝑣𝑡
𝜕𝑦2+
𝜕
𝜕𝑦
𝜕𝑣𝑡
𝜕𝑦
+
2
𝜕
𝜕𝑥
𝜕𝑢𝑡
𝜕𝑦+
2
𝜕
𝜕𝑦
𝜕𝑢𝑡
𝜕𝑥
+ 𝛽𝑔 2
3
𝜕2𝜂
𝜕𝑥2𝜕𝑦+
2
3
𝜕3𝜂
𝜕𝑦3+
𝜕
𝜕𝑦
𝜕2𝜂
𝜕𝑦2
+
2
𝜕
𝜕𝑥
𝜕2𝜂
𝜕𝑥𝜕𝑦+
2
𝜕
𝜕𝑦
𝜕2𝜂
𝜕𝑥2
(2b)
In these equations, u(u,v) is the two-dimensional
depth averaged velocity vector, η is the water
surface elevation, h(x,y) is the water depth as
measured from the still water level, and g is the
gravitational acceleration. The subscript, t,
denotes partial differentiation with respect to
time.
The dispersion relation for these equations after
linearization for uniform water depth is
𝑐2 =ω2
𝑘2=
𝑔(1 + β𝑘22 3)
1 + (1 + β)𝑘22 3 (3)
where c is the wave celerity; ω is the wave
circular frequency and k is the wave number. β is
equal to 1/5 and can be determined by best
matching Eq. (3) with the second order Padé
approximant of the full linear dispersion relation
𝜔2/𝑔𝑘 = 𝑡𝑎𝑛 𝑘.
3. NUMERICAL MODEL
3.1 Finite element method
Governing equations (1) and (2) are solved by a
numerical finite element method as follows:
Engineering Applications of Computational Fluid Mechanics Vol. 6, No. 1 (2012)
28
Two numerical methods are used to discretize the
equations. In the first method (Method A), spatial
derivatives are discretized by Galerkin finite
element approximation while semi implicit
method is used to discretize the derivatives in
time. In the second method (Method B), spatial
derivatives are discretized in the same way as in
(Method A), but explicit Adams–Bashforth–
Moulton (ABM) method with predictor–corrector
scheme similar to that used by Wei and Kirby
(1995) is applied to discretize derivatives in time.
These two methods which have different
accuracies are applied to discretize the one-
dimensional simplified form of Eqs. (1) and (2),
as outlined below. The one-dimensional form of
equations (1) and (2) is as follows:
𝜂𝑡 +𝜕
𝜕𝑥 𝐻𝑢 = 0 (4)
𝑢𝑡 + 𝑢𝜕𝑢
𝜕𝑥+ 𝑔
𝜕𝜂
𝜕𝑥
= 1 + 𝛽
3
𝜕2𝑢𝑡
𝜕𝑥2+
𝜕
𝜕𝑥
𝜕𝑢𝑡
𝜕𝑥
+ 𝛽𝑔[
3
𝜕3𝜂
𝜕𝑥3+
𝜕
𝜕𝑥
𝜕2𝜂
𝜕𝑥2]
(5)
where H = η+ h.
By subdividing computational domain Ω into N
elements, N+1nodes are generated. The
corresponding dependent variables at each point
are approximated within the elements as follows:
𝑓 ≈ 𝑁𝑖𝑓𝑖
𝑛𝑑
𝑖=1
(6)
where 𝑓𝑖 is the value of any dependent variable at
the nodal point(𝑢, 𝜂), nd is the number of nodes
and 𝑁𝑖 is the interpolation function. Due to the
presence of third-spatial derivatives in Eq. (5),
three-station Lagrange interpolation polynomials
are used for 𝑁𝑖 and subsequently integrated.
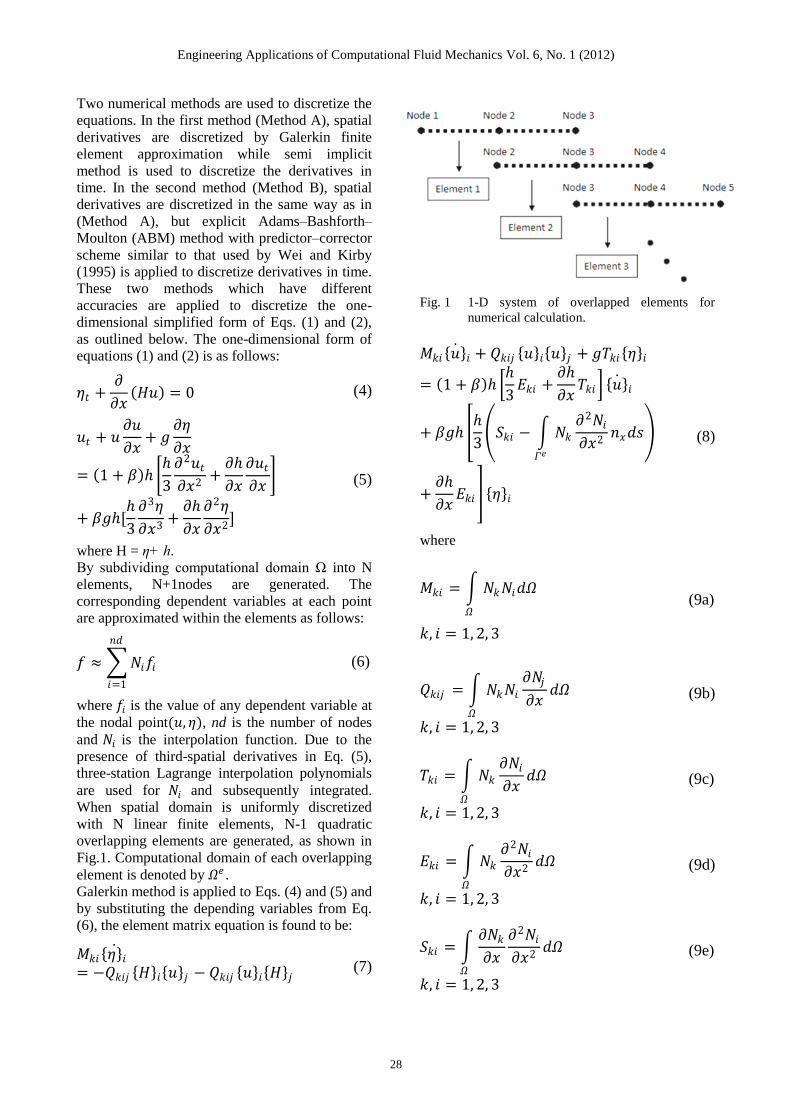
When spatial domain is uniformly discretized
with N linear finite elements, N-1 quadratic
overlapping elements are generated, as shown in
Fig.1. Computational domain of each overlapping
element is denoted by 𝛺𝑒 .
Galerkin method is applied to Eqs. (4) and (5) and
by substituting the depending variables from Eq.
(6), the element matrix equation is found to be:
𝑀𝑘𝑖 𝜂 𝑖
= −𝑄𝑘𝑖𝑗 𝐻 𝑖 𝑢 𝑗 − 𝑄𝑘𝑖𝑗 𝑢 𝑖 𝐻 𝑗 (7)
Fig. 1 1-D system of overlapped elements for
numerical calculation.
𝑀𝑘𝑖 𝑢 𝑖 + 𝑄𝑘𝑖𝑗 𝑢 𝑖 𝑢 𝑗 + 𝑔𝑇𝑘𝑖 𝜂 𝑖
= 1 + 𝛽
3𝐸𝑘𝑖 +
𝜕
𝜕𝑥𝑇𝑘𝑖 𝑢 𝑖
+ 𝛽𝑔
3 𝑆𝑘𝑖 − 𝑁𝑘
𝜕2𝑁𝑖
𝜕𝑥2
𝛤𝑒
𝑛𝑥𝑑𝑠
+𝜕
𝜕𝑥𝐸𝑘𝑖 𝜂 𝑖
(8)
where
𝑀𝑘𝑖 = 𝑁𝑘𝑁𝑖𝑑𝛺
𝛺
𝑘, 𝑖 = 1, 2, 3
(9a)
𝑄𝑘𝑖𝑗 = 𝑁𝑘𝑁𝑖
𝜕𝑁𝑗
𝜕𝑥𝛺
𝑑𝛺
𝑘, 𝑖 = 1, 2, 3
(9b)
𝑇𝑘𝑖 = 𝑁𝑘
𝜕𝑁𝑖
𝜕𝑥𝛺
𝑑𝛺
𝑘, 𝑖 = 1, 2, 3
(9c)
𝐸𝑘𝑖 = 𝑁𝑘
𝜕2𝑁𝑖
𝜕𝑥2
𝛺
𝑑𝛺
𝑘, 𝑖 = 1, 2, 3
(9d)
𝑆𝑘𝑖 = 𝜕𝑁𝑘
𝜕𝑥
𝜕2𝑁𝑖
𝜕𝑥2
𝛺
𝑑𝛺
𝑘, 𝑖 = 1, 2, 3
(9e)

Engineering Applications of Computational Fluid Mechanics Vol. 6, No. 1 (2012)
29
3.2 Time integration methods
The time derivatives are discretized using two
different schemes which are explained below:
a) Semi-implicit method: The discretized form of
the nodal values are written as
𝑓 𝑖 = 𝜃 𝑓 𝑖𝑛𝑡 + (1 − 𝜃) 𝑓 𝑖
𝑛𝑡+1 or
𝑓∗ 𝑖 𝑓 𝑗= 𝑓∗ 𝑖
𝑛𝑡 (𝜃 𝑓 𝑗𝑛𝑡 + 1 − 𝜃 𝑓 𝑗
𝑛𝑡+1) (10)
where θ is called the “relaxation coefficient”
ranging from 0 to 1 while 𝑓∗ and 𝑓 are the
dependent nodal variables.
The first terms of equations (7) and (8) are
discretized by backward finite difference as
𝑓𝑡 𝑖 =( 𝑓 𝑖
𝑛𝑡 +1− 𝑓 𝑖𝑛𝑡 )
∆𝑡+ О(∆𝑡) (11)
Upon generation of element matrices and
assemblage of them, global matrix is formed and
solved by a modified SOR solver.
b) Predictor-corrector method: The assembled
global equations corresponding to Eqs. (7) or
(8) can be written in matrix form as
𝑀 𝑓 = 𝑬 (12)
where M is the coefficient matrix and E is a
vector calculated from the known values of
𝜂 𝑜𝑟 𝑢. 𝑓(𝜂, 𝑢) is a vector depending on 𝜂 and
𝑢 variables.
In order for Eq. (8) to become analogous with Eq.
(12), Eq. (8) has been transformed to the
following two equations:
𝑀𝑘𝑖 𝑢 𝑖 = −𝑄𝑘𝑖𝑗 𝑢 𝑖 𝑢 𝑗 − 𝑔𝑇𝑘𝑖 𝜂 𝑖
+ 𝛽𝑔
3 𝑆𝑘𝑖 − 𝑁𝑘
𝜕2𝑁𝑖
𝜕𝑥2
𝛤𝑒
𝑛𝑥𝑑𝑠
+𝜕
𝜕𝑥𝐸𝑘𝑖 𝜂 𝑖
(13)
𝑀𝑘𝑖 𝑢 𝑖
= 1 + 𝛽
3 𝐸𝑘𝑖 +
𝜕
𝜕𝑥 𝑇𝑘𝑖 𝑢 𝑖
+ 𝑀𝑘𝑖 𝑢 𝑖
(14)
If initial conditions are specified, i.e. if the values
of η and u at the time levels of 𝑛 − 2, 𝑛 − 1, and
𝑛 are available, then the solution at the
subsequent time level 𝑛 + 1 can be obtained by
virtue of the following procedure:
1) Evaluation of the right-hand sides of
equations (7) and (13) at time level 𝑛, 𝑛 −1, 𝑛 − 2;
2) Time Integration of equations (7) and (13) by
means of the predictor stage of the ABM
scheme:
𝑀 𝑓 𝑛+1
= 𝑀 𝑓 𝑛
+∆𝑡
12 23 𝐸 𝑛 − 16 𝐸 𝑛−1 + 5 𝐸 𝑛−2
+ 𝑂(∆𝑡3)
(15)
3) Evaluation of 𝑢 from 𝑢 ;
4) Evaluation of right-hand sides of Eqs. (7) and
(13) at time level 𝑛 + 1;
5) Time Integration of equations (7) and (13) by
means of the corrector stage of the ABM
scheme:
𝑀 𝑓 𝑛+1
= 𝑀 𝑓 𝑛
+∆𝑡
24 9 𝐸 𝑛+1 + 19 𝐸 𝑛 − 5 𝐸 𝑛−1
+ 5 𝐸 𝑛−2 + 𝑂(∆𝑡3)
(16)
6) Evaluation of 𝑢 from 𝑢 ;
Steps 4 through 6 are repeated until convergence
is reached, as suggested by Bellotti and Brocchini
(2001).
4. APPLICATION AND RESULTS
4.1 Shoaling of solitary waves on plane
beaches
In this case study, the suggested model is applied
to the shoaling of solitary waves on different
slopes in the hope of offering a new method for
determining the shoaling coefficient of solitary
waves over sloped beaches. The methods of
generating solitary wave are different based on
the type of governing equations involved (Hafsia
et al., 2009). However, the best method for
solving the Boussinesq equations seems to be the
use of the initial water profile which is found
from the exact solution of the weakened type of
the governing equation (Peregrine, 1967).
Accordingly, two solitary waves with different
initial heights, i.e. 𝛿 =𝜂0
0, propagating over four
different slopes, i.e. S, ranging from gentle
(1:100) to steep (1:8) are considered.
Engineering Applications of Computational Fluid Mechanics Vol. 6, No. 1 (2012)
30
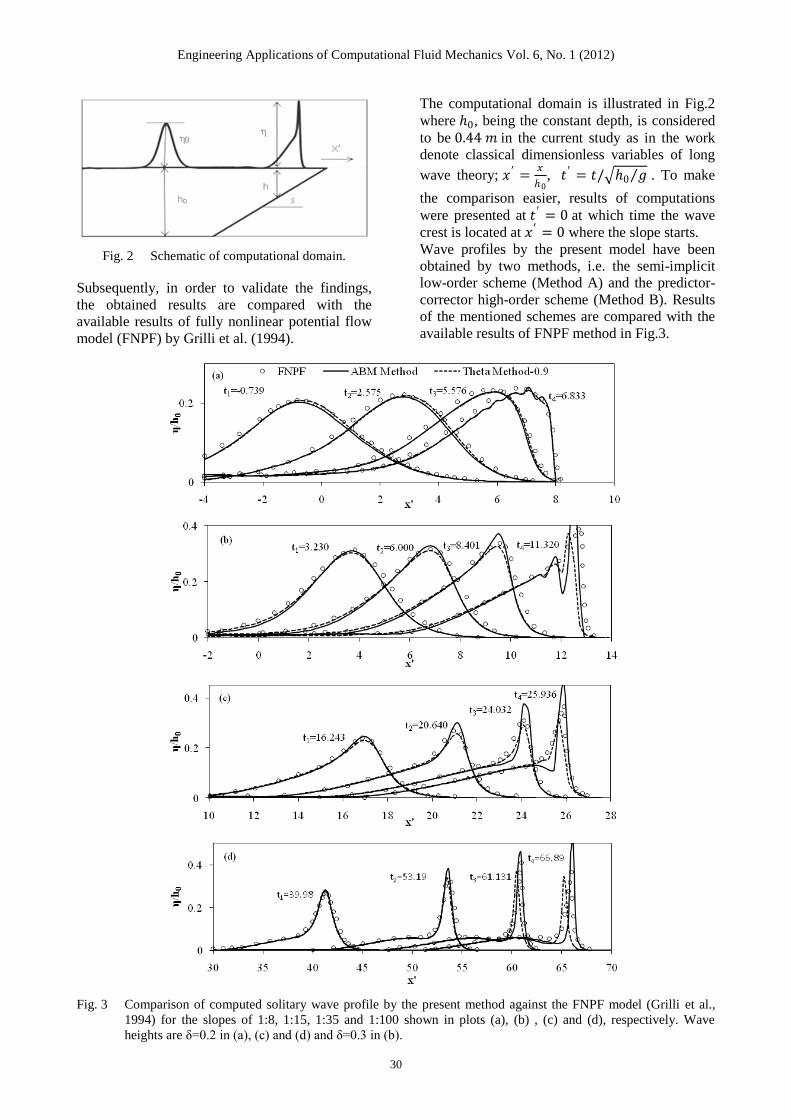
Fig. 2 Schematic of computational domain.
Subsequently, in order to validate the findings,
the obtained results are compared with the
available results of fully nonlinear potential flow
model (FNPF) by Grilli et al. (1994).
The computational domain is illustrated in Fig.2
where 0, being the constant depth, is considered
to be 0.44 𝑚 in the current study as in the work
denote classical dimensionless variables of long
wave theory; 𝑥′ =𝑥
0, 𝑡′ = 𝑡/ 0 𝑔 . To make
the comparison easier, results of computations
were presented at 𝑡′ = 0 at which time the wave
crest is located at 𝑥′ = 0 where the slope starts.
Wave profiles by the present model have been
obtained by two methods, i.e. the semi-implicit
low-order scheme (Method A) and the predictor-
corrector high-order scheme (Method B). Results
of the mentioned schemes are compared with the
available results of FNPF method in Fig.3.
Fig. 3 Comparison of computed solitary wave profile by the present method against the FNPF model (Grilli et al.,
1994) for the slopes of 1:8, 1:15, 1:35 and 1:100 shown in plots (a), (b) , (c) and (d), respectively. Wave
heights are δ=0.2 in (a), (c) and (d) and δ=0.3 in (b).
Engineering Applications of Computational Fluid Mechanics Vol. 6, No. 1 (2012)
31
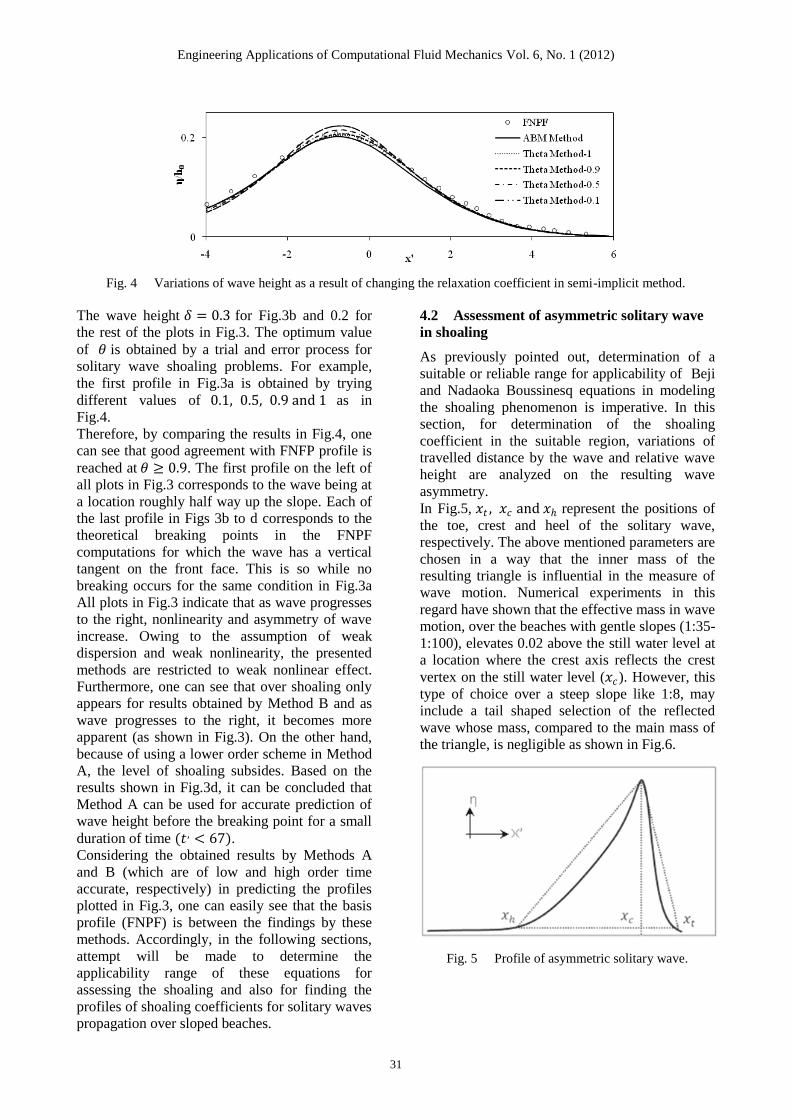
Fig. 4 Variations of wave height as a result of changing the relaxation coefficient in semi-implicit method.
The wave height 𝛿 = 0.3 for Fig.3b and 0.2 for
the rest of the plots in Fig.3. The optimum value
of 𝜃 is obtained by a trial and error process for
solitary wave shoaling problems. For example,
the first profile in Fig.3a is obtained by trying
different values of 0.1, 0.5, 0.9 and 1 as in
Fig.4.
Therefore, by comparing the results in Fig.4, one
can see that good agreement with FNFP profile is
reached at 𝜃 ≥ 0.9. The first profile on the left of
all plots in Fig.3 corresponds to the wave being at
a location roughly half way up the slope. Each of
the last profile in Figs 3b to d corresponds to the
theoretical breaking points in the FNPF
computations for which the wave has a vertical
tangent on the front face. This is so while no
breaking occurs for the same condition in Fig.3a
All plots in Fig.3 indicate that as wave progresses
to the right, nonlinearity and asymmetry of wave
increase. Owing to the assumption of weak
dispersion and weak nonlinearity, the presented
methods are restricted to weak nonlinear effect.
Furthermore, one can see that over shoaling only
appears for results obtained by Method B and as
wave progresses to the right, it becomes more
apparent (as shown in Fig.3). On the other hand,
because of using a lower order scheme in Method
A, the level of shoaling subsides. Based on the
results shown in Fig.3d, it can be concluded that
Method A can be used for accurate prediction of
wave height before the breaking point for a small
duration of time (𝑡 , < 67).
Considering the obtained results by Methods A
and B (which are of low and high order time
accurate, respectively) in predicting the profiles
plotted in Fig.3, one can easily see that the basis
profile (FNPF) is between the findings by these
methods. Accordingly, in the following sections,
attempt will be made to determine the
applicability range of these equations for
assessing the shoaling and also for finding the
profiles of shoaling coefficients for solitary waves
propagation over sloped beaches.
4.2 Assessment of asymmetric solitary wave
in shoaling
As previously pointed out, determination of a
suitable or reliable range for applicability of Beji
and Nadaoka Boussinesq equations in modeling
the shoaling phenomenon is imperative. In this
section, for determination of the shoaling
coefficient in the suitable region, variations of
travelled distance by the wave and relative wave
height are analyzed on the resulting wave
asymmetry.
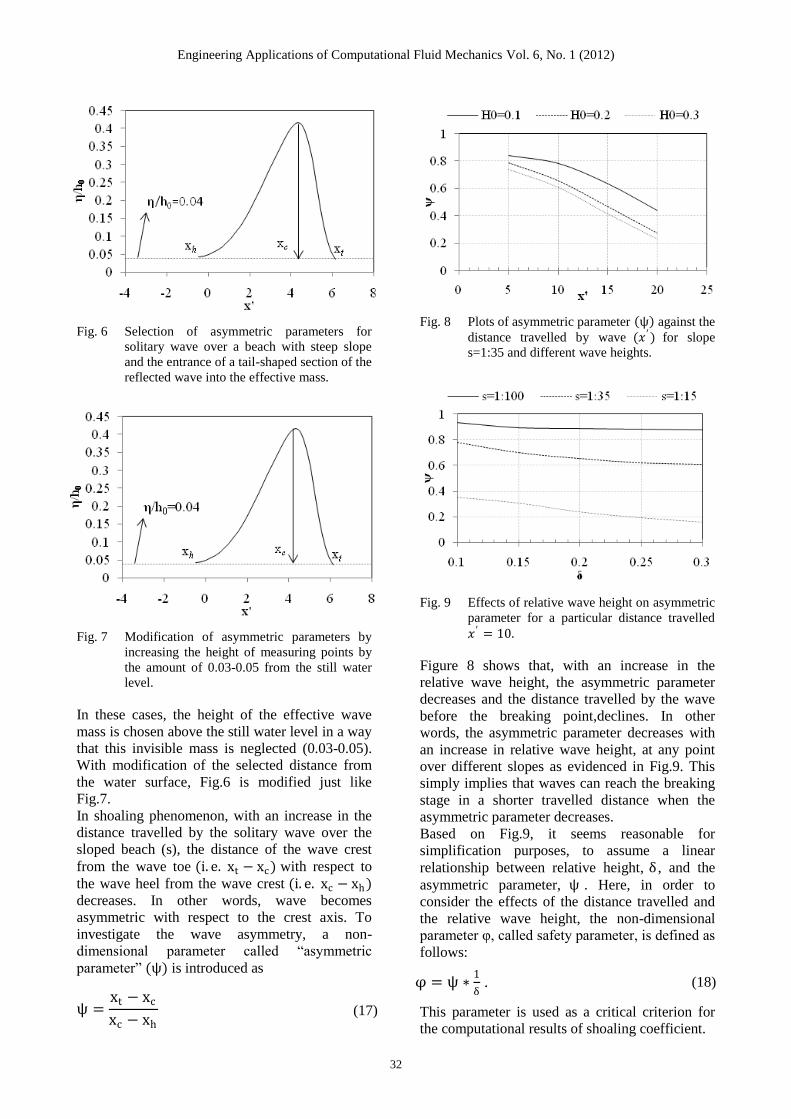
In Fig.5, 𝑥𝑡 , 𝑥𝑐 and 𝑥 represent the positions of
the toe, crest and heel of the solitary wave,
respectively. The above mentioned parameters are
chosen in a way that the inner mass of the
resulting triangle is influential in the measure of
wave motion. Numerical experiments in this
regard have shown that the effective mass in wave
motion, over the beaches with gentle slopes (1:35-
1:100), elevates 0.02 above the still water level at
a location where the crest axis reflects the crest
vertex on the still water level (𝑥𝑐). However, this
type of choice over a steep slope like 1:8, may
include a tail shaped selection of the reflected
wave whose mass, compared to the main mass of
the triangle, is negligible as shown in Fig.6.
Fig. 5 Profile of asymmetric solitary wave.
Engineering Applications of Computational Fluid Mechanics Vol. 6, No. 1 (2012)
32
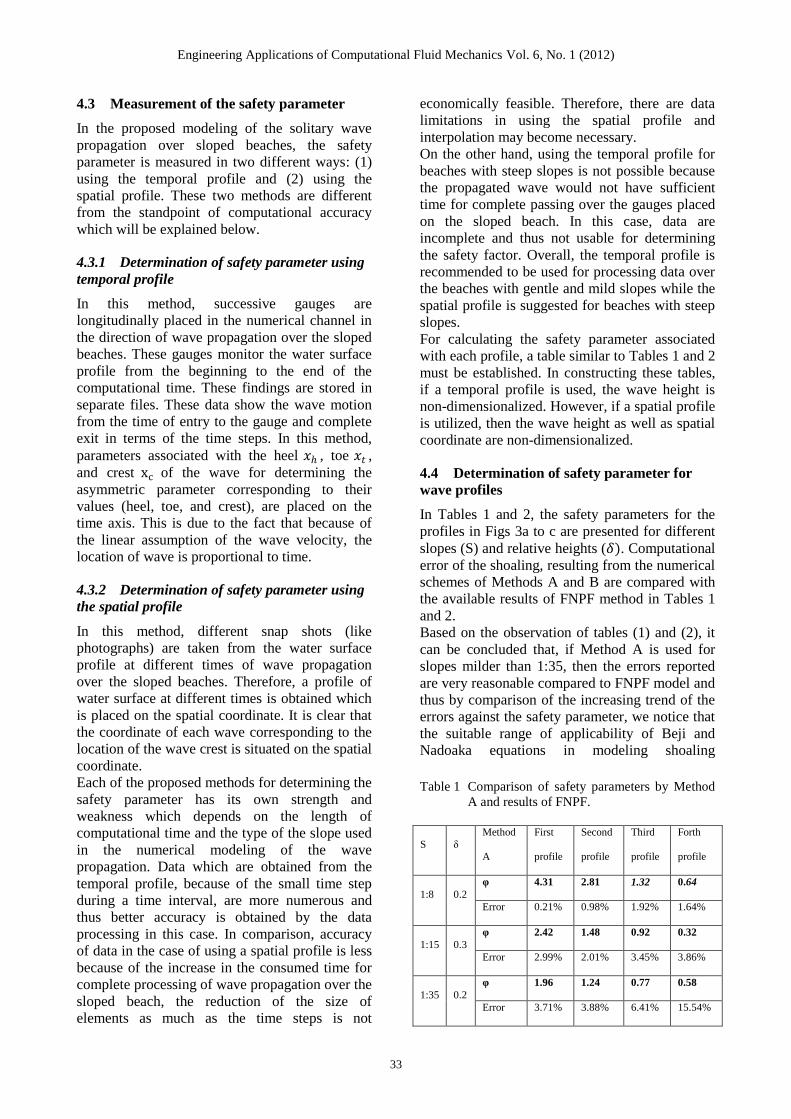
Fig. 6 Selection of asymmetric parameters for
solitary wave over a beach with steep slope
and the entrance of a tail-shaped section of the
reflected wave into the effective mass.
Fig. 7 Modification of asymmetric parameters by
increasing the height of measuring points by
the amount of 0.03-0.05 from the still water
level.
In these cases, the height of the effective wave
mass is chosen above the still water level in a way
that this invisible mass is neglected (0.03-0.05).
With modification of the selected distance from
the water surface, Fig.6 is modified just like
Fig.7.
In shoaling phenomenon, with an increase in the
distance travelled by the solitary wave over the
sloped beach (s), the distance of the wave crest
from the wave toe (i. e. xt − xc) with respect to
the wave heel from the wave crest (i. e. xc − xh )
decreases. In other words, wave becomes
asymmetric with respect to the crest axis. To
investigate the wave asymmetry, a non-
dimensional parameter called “asymmetric
parameter” (ψ) is introduced as
ψ =xt − xc
xc − xh (17)
Fig. 8 Plots of asymmetric parameter ψ against the
distance travelled by wave (𝑥 ′) for slope
s=1:35 and different wave heights.
Fig. 9 Effects of relative wave height on asymmetric
parameter for a particular distance travelled
𝑥 ′ = 10.
Figure 8 shows that, with an increase in the
relative wave height, the asymmetric parameter
decreases and the distance travelled by the wave
before the breaking point,declines. In other
words, the asymmetric parameter decreases with
an increase in relative wave height, at any point
over different slopes as evidenced in Fig.9. This
simply implies that waves can reach the breaking
stage in a shorter travelled distance when the
asymmetric parameter decreases.
Based on Fig.9, it seems reasonable for
simplification purposes, to assume a linear
relationship between relative height, δ , and the
asymmetric parameter, ψ . Here, in order to
consider the effects of the distance travelled and
the relative wave height, the non-dimensional
parameter φ, called safety parameter, is defined as
follows:
φ = ψ ∗1
δ . (18)
This parameter is used as a critical criterion for
the computational results of shoaling coefficient.
Engineering Applications of Computational Fluid Mechanics Vol. 6, No. 1 (2012)
33
4.3 Measurement of the safety parameter
In the proposed modeling of the solitary wave
propagation over sloped beaches, the safety
parameter is measured in two different ways: (1)
using the temporal profile and (2) using the
spatial profile. These two methods are different
from the standpoint of computational accuracy
which will be explained below.
4.3.1 Determination of safety parameter using
temporal profile
In this method, successive gauges are
longitudinally placed in the numerical channel in
the direction of wave propagation over the sloped
beaches. These gauges monitor the water surface
profile from the beginning to the end of the
computational time. These findings are stored in
separate files. These data show the wave motion
from the time of entry to the gauge and complete
exit in terms of the time steps. In this method,
parameters associated with the heel 𝑥 , toe 𝑥𝑡 ,
and crest xc of the wave for determining the
asymmetric parameter corresponding to their
values (heel, toe, and crest), are placed on the
time axis. This is due to the fact that because of
the linear assumption of the wave velocity, the
location of wave is proportional to time.
4.3.2 Determination of safety parameter using
the spatial profile
In this method, different snap shots (like
photographs) are taken from the water surface
profile at different times of wave propagation
over the sloped beaches. Therefore, a profile of
water surface at different times is obtained which
is placed on the spatial coordinate. It is clear that
the coordinate of each wave corresponding to the
location of the wave crest is situated on the spatial
coordinate.
Each of the proposed methods for determining the
safety parameter has its own strength and
weakness which depends on the length of
computational time and the type of the slope used
in the numerical modeling of the wave
propagation. Data which are obtained from the
temporal profile, because of the small time step
during a time interval, are more numerous and
thus better accuracy is obtained by the data
processing in this case. In comparison, accuracy
of data in the case of using a spatial profile is less
because of the increase in the consumed time for
complete processing of wave propagation over the
sloped beach, the reduction of the size of
elements as much as the time steps is not
economically feasible. Therefore, there are data
limitations in using the spatial profile and
interpolation may become necessary.
On the other hand, using the temporal profile for
beaches with steep slopes is not possible because
the propagated wave would not have sufficient
time for complete passing over the gauges placed
on the sloped beach. In this case, data are
incomplete and thus not usable for determining
the safety factor. Overall, the temporal profile is
recommended to be used for processing data over
the beaches with gentle and mild slopes while the
spatial profile is suggested for beaches with steep
slopes.
For calculating the safety parameter associated
with each profile, a table similar to Tables 1 and 2
must be established. In constructing these tables,
if a temporal profile is used, the wave height is
non-dimensionalized. However, if a spatial profile
is utilized, then the wave height as well as spatial
coordinate are non-dimensionalized.
4.4 Determination of safety parameter for
wave profiles
In Tables 1 and 2, the safety parameters for the
profiles in Figs 3a to c are presented for different
slopes (S) and relative heights (𝛿). Computational
error of the shoaling, resulting from the numerical
schemes of Methods A and B are compared with
the available results of FNPF method in Tables 1
and 2.
Based on the observation of tables (1) and (2), it
can be concluded that, if Method A is used for
slopes milder than 1:35, then the errors reported
are very reasonable compared to FNPF model and
thus by comparison of the increasing trend of the
errors against the safety parameter, we notice that
the suitable range of applicability of Beji and
Nadoaka equations in modeling shoaling
Table 1 Comparison of safety parameters by Method
A and results of FNPF.
S δ
Method
A
First
profile
Second
profile
Third
profile
Forth
profile
1:8 0.2
φ 4.31 2.81 1.32 0.64
Error 0.21% 0.98% 1.92% 1.64%
1:15 0.3
φ 2.42 1.48 0.92 0.32
Error 2.99% 2.01% 3.45% 3.86%
1:35 0.2
φ 1.96 1.24 0.77 0.58
Error 3.71% 3.88% 6.41% 15.54%
Engineering Applications of Computational Fluid Mechanics Vol. 6, No. 1 (2012)
34
Table 2 Comparison of safety parameters by Method
B and results of FNPF.
s δ Method
B
First
profile
Second
profile
Third
profile
Fourth
profile
1:8 0.2
φ 4.6 2.97 1.23 0.63
Error 2.77% 1.96% 1.96% -1.45%
1:15 0.3
φ 2.61 1.81 1.01 0.29
Error 0.77% -3.45% -10.2% -58.1%
1:35 0.2
φ 1.94 1.21 0.8 0.49
Error -2.56% -12.74% -20.42% -24.57%
phenomenon is found to be approximately
𝜑 ≥ 0.5. On the other hand, for slopes steeper
than 1:35, if Method B is used, the identified
suitable range is found to be approximately
𝜑 ≥ 1.0 . Therefore, based on the fact that the
Method A is proved to cover a wider range of 𝜑
with better accuracy than Method B for modeling
the shoaling phenomenon, in the next section, the
values of safety parameter will be determined by
Method A.
4.5 Calculation of shoaling coefficient using
safety parameter
The ratio of the wave height at each point of
propagation to the initial wave height in deep
waters, is called shoaling coefficient. This
coefficient is important for engineers in designing
the offshore structures in vicinity of the beaches,
because as the wave height increases, the exerted
force on the structures increases proportionally, as
well. On the other hand, with an increase in
probability of the wave breaking, this force
becomes more important than before.
Accordingly, an effort has been made to use the
shoaling coefficients to inform the design
engineers about how the wave height changes and
also about the increase in probability of the wave
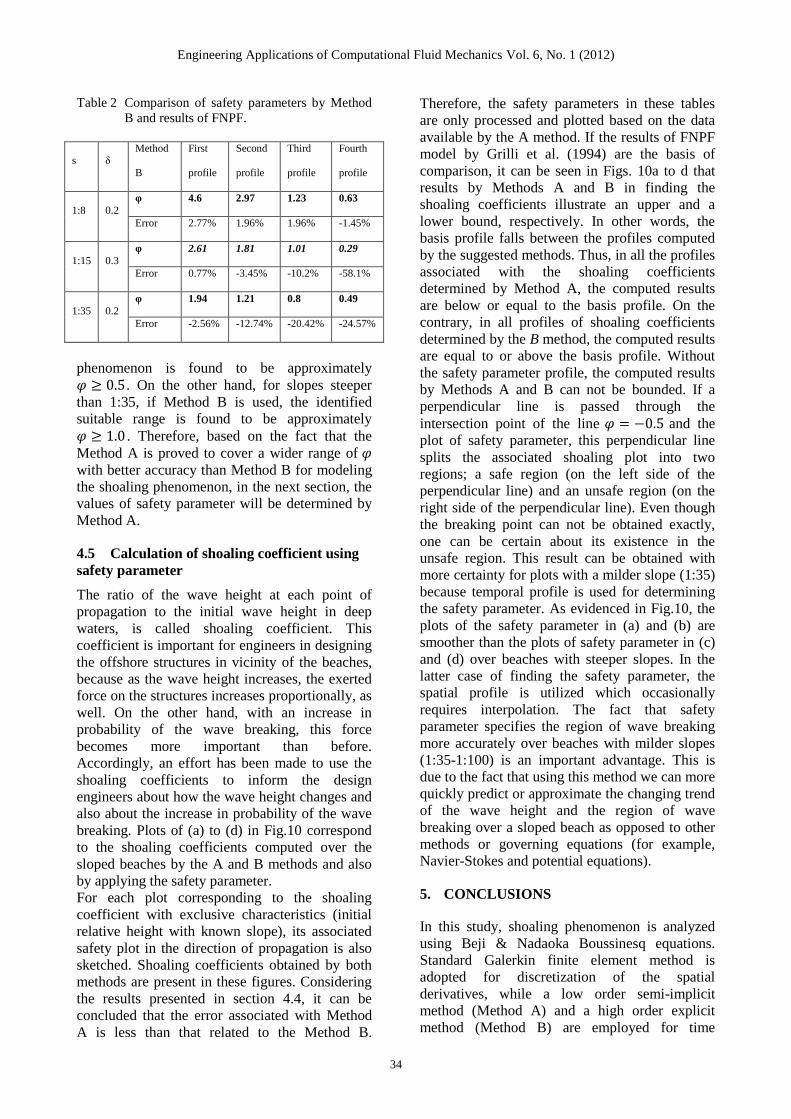
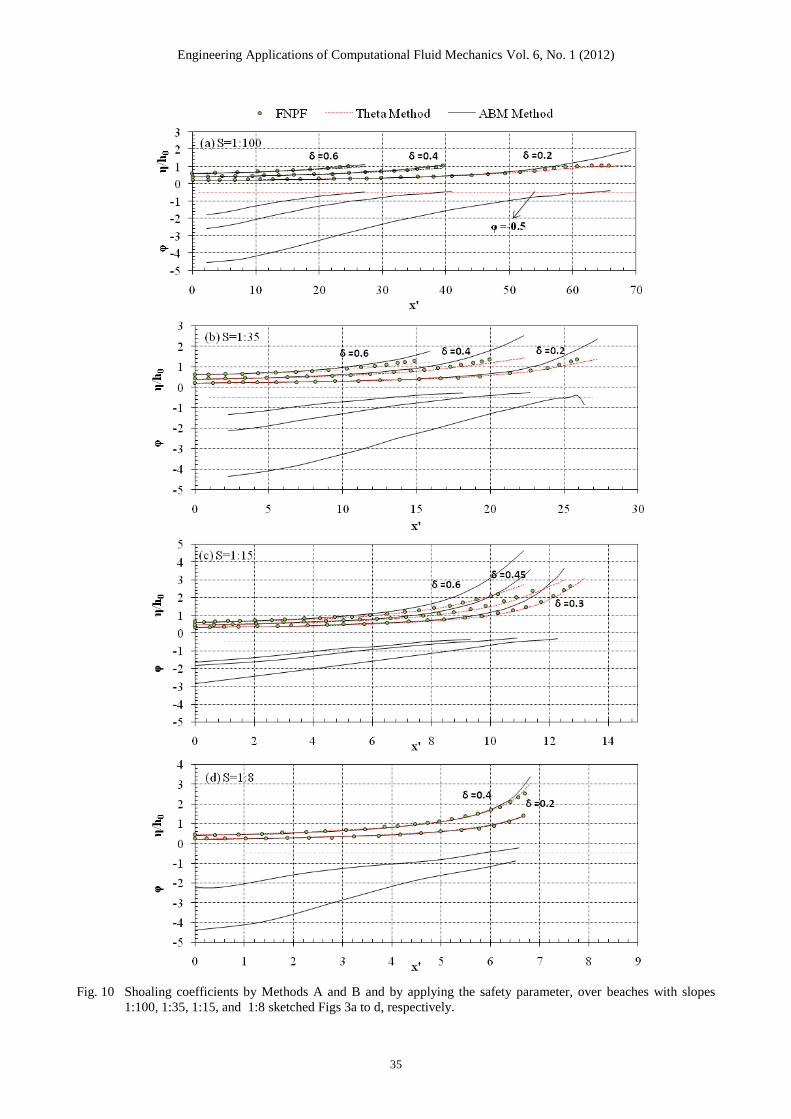
breaking. Plots of (a) to (d) in Fig.10 correspond
to the shoaling coefficients computed over the
sloped beaches by the A and B methods and also
by applying the safety parameter.
For each plot corresponding to the shoaling
coefficient with exclusive characteristics (initial
relative height with known slope), its associated
safety plot in the direction of propagation is also
sketched. Shoaling coefficients obtained by both
methods are present in these figures. Considering
the results presented in section 4.4, it can be
concluded that the error associated with Method
A is less than that related to the Method B.
Therefore, the safety parameters in these tables
are only processed and plotted based on the data
available by the A method. If the results of FNPF
model by Grilli et al. (1994) are the basis of
comparison, it can be seen in Figs. 10a to d that
results by Methods A and B in finding the
shoaling coefficients illustrate an upper and a
lower bound, respectively. In other words, the
basis profile falls between the profiles computed
by the suggested methods. Thus, in all the profiles
associated with the shoaling coefficients
determined by Method A, the computed results
are below or equal to the basis profile. On the
contrary, in all profiles of shoaling coefficients
determined by the B method, the computed results
are equal to or above the basis profile. Without
the safety parameter profile, the computed results
by Methods A and B can not be bounded. If a
perpendicular line is passed through the
intersection point of the line 𝜑 = −0.5 and the
plot of safety parameter, this perpendicular line
splits the associated shoaling plot into two
regions; a safe region (on the left side of the
perpendicular line) and an unsafe region (on the
right side of the perpendicular line). Even though
the breaking point can not be obtained exactly,
one can be certain about its existence in the
unsafe region. This result can be obtained with
more certainty for plots with a milder slope (1:35)
because temporal profile is used for determining
the safety parameter. As evidenced in Fig.10, the
plots of the safety parameter in (a) and (b) are
smoother than the plots of safety parameter in (c)
and (d) over beaches with steeper slopes. In the
latter case of finding the safety parameter, the
spatial profile is utilized which occasionally
requires interpolation. The fact that safety
parameter specifies the region of wave breaking
more accurately over beaches with milder slopes
(1:35-1:100) is an important advantage. This is
due to the fact that using this method we can more
quickly predict or approximate the changing trend
of the wave height and the region of wave
breaking over a sloped beach as opposed to other
methods or governing equations (for example,
Navier-Stokes and potential equations).
5. CONCLUSIONS
In this study, shoaling phenomenon is analyzed
using Beji & Nadaoka Boussinesq equations.
Standard Galerkin finite element method is
adopted for discretization of the spatial
derivatives, while a low order semi-implicit
method (Method A) and a high order explicit
method (Method B) are employed for time
Engineering Applications of Computational Fluid Mechanics Vol. 6, No. 1 (2012)
35
Fig. 10 Shoaling coefficients by Methods A and B and by applying the safety parameter, over beaches with slopes
1:100, 1:35, 1:15, and 1:8 sketched Figs 3a to d, respectively.
Engineering Applications of Computational Fluid Mechanics Vol. 6, No. 1 (2012)
36
integration. By comparison of the obtained results
from modeling the free surface profiles over the
sloped beach with those of FNPF model, it is
clear that the FNPF results fall between the
profiles produced Methods A and B, albeit the
result of Method A is closer to the FNPF profile.
It is further noted that plots of shoaling
coefficients by FNPF model are bounded below
by the result of Method A and above by the result
of Method B. In order to determine the upper and
lower bounds of this range, the variation of wave
geometry in propagation over the sloped beach
was studied. This study showed that the wave
geometry during the propagation over the sloped
beach becomes asymmetric in a way that the
distance of the wave crest from the wave toe with
respect to the distance of the wave heel from the
wave crest would reduce. This reduction causes
instability in the wave and ultimately brings about
wave breaking. The ratio of the mentioned
distances was initially called asymmetric
parameter. However, since waves with higher
relative height break earlier, this ratio was
redefined as safety parameter which is inversely
proportional to the relative height of the wave.
Furthermore, shoaling coefficients over sloped
beaches were computed using the Methods A and
B. Shoaling coefficients along with their
associated safety parameters were plotted. The
intersection point of the plot of safety parameter
and the horizontal line 𝜑 = −0.5 on the plot of
shoaling coefficient indicates the start of the
unsafe region and the probability of wave
breaking in that region. This analysis was more
carefully pursued for beaches with slopes 1:35-
1:100, since using temporal profiles instead of
spatial profiles was possible.
Overall, it can be concluded that, contrary to the
Navier-Stokes and potential equations, using the
one-dimensional extended Boussinesq equations
for calculating the shoaling coefficients over
beaches with slopes 1:35-1:100, from the
standpoint of computational time, is more
economically feasible.
Another conclusion that can be drawn is the fact
that, in modeling the shoaling phenomenon by
solitary wave propagation over sloped beaches,
the application of a low order time scheme seems
to be more appropriate.
REFERENCES
1. Ambrosi D, Quartapelle L )1998(. A Taylor–
Galerkin method for simulation nonlinear-
dispersive water waves. Journal of
Computational Physics 146:546–569.
2. Antunes do Carmo JS, Seabra Santos FJ,
Barthélemy E (1993). Surface waves
propagation in shallow water: A finite
element model. International Journal for
Numerical Methods in Fluids 16:447–459.
3. Avilez-Valente P, Seabra-Santos FJ (2008). A
high-order Petrov–Galerkin finite element
method for the classical Boussinesq wave
model. International Journal for Numerical
Methods in Fluids 59(9):969–1010.
4. Beji S and Nadaoka K (1996). A formal
derivation and numerical modeling of the
improved Boussinesq equations for varying
depth. Ocean Engineering 23:691–704.
5. Bellotti G, Brocchini M (2001). On the
shoreline boundary conditions for
Boussimesq-type models. International
Journal for Numerical Methods in Fluids
37:479–500.
6. Cienfuegos R, Barthélemy E, Bonneton P
(2010). Wave-breaking model for
Boussinesq-type equations including roller
effects in the mass conservation equation.
ASCE Journal of Waterway, Port, Coastal,
and Ocean Engineering 136(1):10–26.
7. Engsig-Karup AP, Hesthaven JS, Bingham
HB, Madsen PA (2006). Nodal DG-FEM
solution of high-order Boussinesq-type
equations. Journal Engineering Math 56:351–
370.
8. Ghadimi P, Jabbari MH, Reisinezhad A
(2011). Finite element modeling of one-
dimesional Boussinesq equations.
International Journal of Modeling Simulation
and Scientific Computing 2(2):1–29.
9. Gobbi MF, Kirby JT, Wei GA (2000). Fully
nonlinear Boussinesq model for surface
waves. Part 2: Extension to 𝑂(𝑘)4. Journal
of Fluid Mechanics 405:181–210.
10. Grilli ST, Skourup J, Svendsein IA (1989).
An efficient boundary element method for
nonlinear water waves. Engng Anal. with
Boundary Elements 6:97–107.
11. Grilli ST, Skourup J, Svendsein IA,
Veeramony J (1994). Shoaling of solitary
waves on plane beaches. ASCE Journal of
Waterway, Port, Coastal, and Ocean
Engineering 120:609–628.
12. Hafsia Z, Haj MB, Lamloumi H, Maalel K
(2009). Comparison between moving paddle
and mass source methods for solitary wave
generation and propagation over a steep
sloping beach. Engineering Applications of
Engineering Applications of Computational Fluid Mechanics Vol. 6, No. 1 (2012)
37
Computational Fluid Mechanics 3(3):355–
368.
13. Hirayama K, Hara N (2003). A simple wave
breaking model with quasi-bore model in
time domain. Report of the Port and Airport
Research Institute 42(2):28–45.
14. Hsu TW, Yang BD, Tsai JY, Chou SE
(2002). A Boussinesq model of nonlinear
wave transformations. Proc. of 12th Intl.
Offshore and Polar Engg. Conf., Kitakyushu,
Japan, May 26–31.
15. Karambas TV and Memos CD (2009).
Boussinesq model for weakly nonlinear fully
dispersive water waves. ASCE Journal of
Waterway, Port, Coastal, and Ocean
Engineering 135(5):187–199.
16. Kawahara M, Cheng JY (1994). Finite
element method for Boussinesq wave
analysis. International Journal of
Computational Fluid Dynamics 2:1–17.
17. Kennedy AB, Chen Q, Kirby JT, Dalrymple
RA (2000). Boussinesq modeling of wave
transformation, breaking, and runup. I: 1D.
ASCE Journal of Waterway, Port, Coastal,
and Ocean Engineering 126(1):39–47.
18. Langtangen HP, Pedersen G (1996). Finite
elements for the Boussinesq wave equations.
In Waves and Nonlinear Processes in
Hydrodynamics. Ed. Grue J, Gjeviki B,
Weber JE. Kluwer Academic, 1–10.
19. Langtangen HP, Pedersen G (1998).
Computational methods for weakly dispersive
and nonlinear water waves. Computer
Methods in Applied Mechanics and
Engineering 160:337–371.
20. Li YS, Liu SX, Yu YX, Lai GZ (1999).
Numerical modeling of Boussinesq equations
by finite element method. Coastal
Engineering 37:97–122.
21. Li B (2008). Equations for regular and
irregular water wave propagation. ASCE
Journal of Waterway, Port, Coastal, and
Ocean Engineering 134(2):121–142.
22. Lin P, Man C (2007). A staggered-grid
numerical algorithm for the extended
Boussinesq equations. Applied Mathematical
Modelling 31:349–368.
23. Lynett PJ, Liu PLF (2004). Linear analysis of
the multi-layer model. Coastal Engineering
51: 439–454.
24. Madsen PA, Bingham HB, Liu HA (2002).
New Boussinesq method for fully nonlinear
waves from shallow water to deep water.
Journal of Fluid Mechanics 462:1–30.
25. Madsen PA, Murray R, Sorensen OR (1991).
A new form of the Boussinesq equations with
improved linear dispersion characteristics.
Coastal Engineering 15:371–388.
26. Madsen PA, Sorensen OR (1992). A new
form of the Boussinesq equations with
improved linear dispersion characteristics.
Part 2. A slowly-varying bathymetry. Coastal
Engineering, 18:183–204.
27. Nwogu O (1993). Alternative form of
Boussinesq equations for nearshore wave
propagation. ASCE Journal of Waterway,
Port, Coastal, Ocean Engineering 119:618–
638.
28. Orszaghova J, Borthwick AGL, Taylor PH
(2010). Boussinesq modeling of solitary wave
propagation, Breaking, runup and
overtopping. Proc. of 32nd Conf. on Coastal
Engineering, Shanghai, China, 32:1–9.
29. Ouahsine A, Sergent P, Hadji S (2008).
Modeling of non-linear waves by an extended
boussinesq model. Engineering Applications
of Computational Fluid Mechanics 2(1):11-
21.
30. Peregrine DH (1967). Long waves on a
beach. Journal of Fluid Mechanics 27:815–
827.
31. Schäffer HA, Madsen PA, Deigaard R (1993).
A Boussonesq model for waves breaking in
shallow water. Costal Engineering 20:185–
202.
32. Sørensen OR, Schäffer HA, Sørensen LS
(2004). Boussinesq type modeling using an
unstructured finite element technique. Coastal
Engineering 50:181-198.
33. Tonelli M, Petti M (2009). Hybrid finite
volume – finite difference scheme for 2DH
improved Boussinesq equations. Costal
Engineering 56:609–620.
34. Tonelli M, Petti M (2011). Simulation of
wave breaking over complex bathymetries
by a Boussinesq model. Journal of
Hydraulic Research, 49(4):473–486. 35. Walkley M, Berzins M (1999). A finite
element method for the one-dimensional
extended Boussinesq equations. International
Journal for Numerical Methods in Fluids
29:143–157.
36. Walkley M, Berzins M (2002). A finite
element method for the two-dimensional
extended Boussinesq equations. International
Journal for Numerical Methods in Fluids
39:865–885.
37. Wei G, Kirby JT (1995). Time-dependent
numerical code for extended Boussinesq
equations. ASCE Journal of Waterway, Port,
Coastal, Ocean Engineering 121:251–261.

Engineering Applications of Computational Fluid Mechanics Vol. 6, No. 1 (2012)
38
38. Wei G, Kirby JT, Grilli ST, Subramanya RA
(1995). Fully nonlinear Boussinesq model for
surface waves. Part 1: Highly nonlinear
unsteady waves. Journal of Fluid Mechanics
294:71–92.
39. Woo SB, Liu PLF (2001). A Petrov–Galerkin
finite element model for one-dimensional
fully nonlinear and weakly dispersive wave
propagation. International Journal for
Numerical Methods in Fluids 37:541–575.
40. Zhao M, Teng B, Cheng L (2004). A new
form of generalized Boussinesq equations for
varying water depth. Ocean Engineering
31:2047–2072.