automated test generation from timed automata
TRANSCRIPT

Int J Softw Tools Technol Transfer (2003) 5: 59–77 / Digital Object Identifier (DOI) 10.1007/s10009-002-0094-1
Automated test generation from timed automata
Brian Nielsen, Arne Skou
Aalborg University, Department of Computer Science, Fredrik Bajersvej 7E, 9220 Aalborg, DenmarkE-mail: {bnielsen,ask}@cs.auc.dkPublished online: 17 June 2003 – Springer-Verlag 2003
Abstract. Testing is the most dominant validation activ-ity used by industry today, and there is an urgent needfor improving its effectiveness, both with respect to thetime and resources for test generation and execution, andobtained test coverage. We present a new technique forautomatic generation of real-time black-box conformancetests for non-deterministic systems from a determiniz-able class of timed automata specifications with a densetime interpretation. In contrast to other attempts, ourtests are generated using a coarse equivalence class parti-tioning of the specification. To analyze the specification,to synthesize the timed tests, and to guarantee coveragewith respect to a coverage criterion, we use the efficientsymbolic techniques recently developed for model check-ing of real-time systems. Application of our prototypetool to a realistic specification shows promising results interms of both the test suite size, and the time and spaceused for test generation.
Keywords: Formal methods – Real-time systems –Automated testing – Test case generation – Testing tool– Timed automata – Symbolic analysis – Test selection –Domain testing – Dense time – State partitioning – Casestudy – Performance evaluation
1 Background
Communicating and embedded real-time systems remainamong the most challenging class of systems to developcorrectly. The challenge arises in part from the inher-ent complexity in these systems, but in particular fromthe lack of adequate methods and tools to deal with thiscomplexity. This applies to most development activities,including specification, design, and implementation.Testing consists of executing a program or a physical
system with the goal of finding errors. It is not unusual to
spend more than a third of the total development time ontesting in industrial projects, and it therefore constitutesa significant portion of the cost and the time to market ofthe product. Because testing is the most dominant vali-dation activity used by industry today, there is an urgentneed for improving its effectiveness, both with respect tothe time and resources used for test generation and execu-tion, and also the obtained coverage.A potential improvement that is being examined by
researchers is to make testing a formal method, and toprovide tools that automate test case generation and exe-cution. This approach has experienced some level of suc-cess: formal specification and automatic test generationare being applied in practice [10, 30, 33, 37], and academicas well as commercial test generations tools are emergingfor specification languages like SDL (Specification andDesign Language) [11, 25, 29, 38], CSP (CommunicatingSequential Processes) [34], Lotos, and Promela [21].However, current tools do not address real-time sys-
tems, or only provide a limited support of testing thetiming aspects. They often abstract away the actual timeat which events are supplied or expected, or do not selectthese time instances thoroughly and systematically.A large varitey of testing types and techniques exist,
and they may be classified by the visibility of the imple-mentation (black box or white box), the granularity ofthe implementation (function, component, system level),and by the correctness aspect being examined (robust-ness, reliability, performance, or behavior). This papercontributes new techniques that will enable automaticgeneration of black box test cases that check the externaltiming behavior of real-time systems or components.
1.1 Model-based systems development
Testing is often perceived as an experimental and ad hocapproach to validating the correctness of a system, and it

60 B. Nielsen, A. Skou: Automated test generation from timed automata
is also contrasted to verification which aims at formallyproving system correctness. One kind of verification tech-nology is model checking where a (fully) automatic toolexamines whether the states of a behavioral descriptionof a system satisfy a given property. Another approachis theorem proving where a proof assistant tool helps thesystem developer to prove that the system has a givenproperty.In our view, testing and verification are complemen-
tary techniques solving different problems. Therefore,both should be used. The relation between different vali-dation techniques and the (simplified) phases of softwaredevelopment is shown in Fig. 1. Based on this observationwe envision a development methodology where formalverification and testing are integral and complementaryactivities, both being centered around the use of formaland machine readable models.The system analysts capture the informal require-
ments by interviewing customers, users, and domain ex-perts about the requirements and expectations they haveto the system. The requirements can then be formu-lated as logical properties or propositions. Completenessand soundness with respect to the informal requirementsare achieved by reviews, inspections, and walk-throughs.Formal consistency check can be applied to the logicalproperties.The analysis and design activities result in an abstract
model or design of the system to be implemented: itscomponents, the behavior of these components, and theirinteraction. The central or critical parts of the model canbe specified in detail using a formal behavioral descrip-tion language such as state machines or process algebra.The modelling and specification effort is by itself valuablebecause it gives very precise insight into the detailed op-eration of the system, but even more importantly, modelchecking can be used to ensure that this formal modelsatisfies the desired properties. Consistency check of therequirements, modeling, andmodel checking of the design
Formal Specification(logical properties)
Implemenation(c-code, OS, hardware)
testing
model checkingtheorem proving
monitoring
walkthroughreviewinspection
Informal specification(natural language)
(state machines)Design
Fig. 1. Testing and verification are complementarytechniques (inspired by Rushby [36])
are important activities, because they contribute to faultdetection at the early development phases where correc-tion can be made at much less costs than at the laterphases.Given a detailed model, the programmers implement
the system using a particular programming language,compiler, and operating system. Automatic code gener-ation from the formal model can also be used in specialcases. However, with the current state of the art, systemconstruction is largely an informal step carried out by hu-mans. Errors may also be present in software componentspurchased from a third party, or in previously developedcomponents used in the new product (and thereby ina different environment). Further, the target system maybe faulty due to errors in the hardware or operating sys-tem, or in the middleware. Therefore, the final physicalsystemmay be faulty even if its design is correct. It shouldalso be mentioned here that many public safety boardsrequire extensive testing of safety critical systems. It is in-sufficient, although important, to show that the design iscorrect: it must be demonstrated that the actual physicalsystem is safe. However, the (verified) design or speci-fication can now be used as a basis for (automatically)generating test cases.The fundamental goal of testing, which cannot be done
by model checking, is to check whether an actual runningphysical system of which we have no or incomplete know-ledge conforms to a specification. A test case describes anexperiment consisting of a sequence (or tree) of commu-nications and associated verdicts to be executed on theimplementation under test. The execution of a test resultsin a pass, fail, or an inconclusive verdict.
1.2 Using formal models for testing
This section explains how a formal specficiation can beinterpreted for test generation. Consider the timed auto-mata specification of a mouse double-click detector inFig. 2. A timed automaton is a finite state machine ex-tended with continous clock variables, enabling condi-tions on edges, and clock resets, see [7].In the initial state the automaton occupies location
s1, and clock x is zero. The value of clock x increasesautonomously as time passes. When the user presses themouse button (click), the automaton moves to locations2 and simoultaneously resets clock x to zero. If the userclicks again before the clock x reaches a value of 2 timeunits, the automaton moves to location s3, and then sig-nals the detection of a double-click ( doubleClick) afterwhich it moves back to the initial location. If no click ismade before 2 time units has elapsed after the first click,the automaton silently moves back to the initial state.From this specification it is easy to suggest a collec-
tion of potential test cases that can be used to check thecorrectness of a given mouse double-click detector imple-mentation. Some examples are shown in Fig. 2. The firstis read as follows: first press click, wait 1.5 time units,

B. Nielsen, A. Skou: Automated test generation from timed automata 61
click! click! click!wait(1.5) wait(5) wait(0.1)click! click! click!doubleClick? doubleClick? doubleClick?(pass) (fail) (pass)
Fig. 2. Specification of a mouse double clickdetector, and potential test cases
press click, and if the detector signals a double-click, thetest execution should be given the verdict pass, i.e., itchecks that double click is signaled when it should be. Thesecond is read as: first press click, wait 5 time units, makethe second click, and if the detector signals a double-click, the test execution should be given the verdict fail,because a double click is in fact not a legal behavior ac-cording to the specification, i.e., the test case checks thatthe detector only signals double click when permitted bythe specification. The third test case checks that two fastclicks are detected as a double click.Observe that an infinite number of test cases can be
generated from this specification. There is an infinitenumber of delays to choose from between each observ-able event, and the loops of the specification can be un-
Fig. 3. Automated testing
folded arbitrarily many times. Good test selection strate-gies therefore become imperative.Because test generation is based explicitly on a for-
mal model, the generated tests will only be as good as themodel. It is therefore important that the model itself hasbeen checked by means of, for example, inspection, simu-lation or model checking.
1.3 Automated testing
An overview of the setup for automated testing is de-picted in Fig. 3. Typically, a test generation tool inputsa specification formed by some kind of finite state ma-chine description of the behavior that is required, desired,and forbidden by the implementation. A formalized im-plementation relation describes exactly what it means foran implementation to be correct with respect to a spe-cification. The test generation tool interprets the speci-fication or transforms it to a data structure appropriatefor test generation, and then computes a set of test se-quences. The test generator must select a subset of testsfor execution only, because exhaustive testing is generallyinfeasible. Test selection can be based on manually statedtest purposes, a fault model, or on a coverage criterionof the specification or implementation (like statement orbranch coverage known from sequential program testing).The generated test cases are usually abstract and
given at the same level of abstraction as the specifica-tion. To become executable, the test cases must be in-terpreted by a test execution tool. The translation ofabstract events into concrete events involves completingparameter lists, and encoding of these to bit strings thatcan be fed to the implementation under test. The execu-tion tool communicates the concrete events to and fromthe implementation using the programming interface thatis available in the test execution environment. Further, it

62 B. Nielsen, A. Skou: Automated test generation from timed automata
manages timers, monitors the implementation under test,maintains log files, controls the overall progress of test ex-ecution, and assigns verdicts to the test execution.Sometimes, test suites are not generated explicitly and
stored in files, but are rather generated event by event asit is being executed. This approach is known as on-the-flytest generation and execution.
1.4 Testing real-time systems
To test real-time systems, the specification languagemustbe extended with constructs for expressing real-time con-straints, the implementation relation must be generalizedto consider the temporal dimension, and the data struc-tures and algorithms used to generate tests must be re-vised to operate on a potentially infinite set of states.Further, the test selection problem is worsened becausea huge number of time instances are relevant to test. Itis therefore necessary to make good decisions of when todeliver an input to the system, andwhen to expect an out-put. The time dimension must be tested thoroughly andsystematically because real-time systems are often safetycritical. Automated test generation for real-time systemsis a fairly new research area, and only few proposals existthat deal with these problems.This paper presents a new technique for automatic
generation of timed tests from a restricted class of densetimed automata specifications. We permit both non-deterministic specifications and (black-box) implementa-tions. Our implementation relation is therefore based onHennessy’s classical testing theory [31] for concurrent sys-tems, which we have extended to take time into account.We believe that it is important to allow non-determin-
istic specifications and implementations. Implementa-tions of real-time systems are usually (indeterminate)concurrent systems, and consequently, the tester cannotin general control or know the order in which events areprocessed by the implementation. Further, the tester maynot always be able to control every parameter of the op-erating environment of the implementation, such as thetemperature, and must be prepared to accept the outputdelivered. Non-determinism is often used in specificationsto abstract over internal decisions in the implementationwhich may not be known, or is too complicated for formalmodelling. Specifically for real-time systems, the responsetimes of the implementation may vary, and the testermust be prepared for the output in a bounded interval,rather than at specific timepoints.We propose to select test cases by partitioning the
state space into coarse grained equivalence classes thatin a systematic way preserve essential timing and dead-lock information, and select a few tests for each class.This approach is inspired by sequential black-box testingtechniques frequently referred to as domain- or partitiontesting [4], by regarding the clocks of a timed specificationas (oddly behaving) input parameters.
We present an algorithm and data structure for sys-tematically generating timed Hennessy tests. The algo-rithm ensures that the specification will be covered suchthat the relevant Hennessy tests for each reachable equiv-alence class will be generated. To compute and cover thereachable equivalence classes, and to compute the timedtest sequences, we employ efficient symbolic reachabilitytechniques based on constraint solving that have recentlybeen developed for model checking of timed automata [6,9, 22, 27, 41].
1.5 Contributions
In summary, the contributions of the paper are:
– We propose a coarse equivalence class partitioning ofthe state space and use this for automatic test selec-tion.– Other work on test generation for real-time systemsallows deterministic specifications only, and use traceinclusion as implementation relation. We permit bothnon-deterministic specifications and (black-box) im-plementations, and use an implementation relationbased on Hennessys testing theory that takes dead-locks into account.– Application of the recently developed symbolic reach-ability techniques has to our knowledge not previouslybeen applied to test generation.– Our techniques are implemented in a prototype testgeneration tool, RTCAT.– We apply our technique to a realistic case study, thePhilips Audio Protocol, and evaluate the generatedtests qualitatively as well as quantitatively.– We provide experimental data about the efficiency ofour technique. Application of RTCAT to one smalland one larger case study results in encouraginglysmall test suites.
The remainder of the paper is organized as follows.Section 2 summarizes the related work. Section 3 intro-duces Hennessy tests, the specification language, thesymbolic reachability methods, and test selection strat-egy. Section 4 presents the test generation algorithm,and Sect. 5 presents the facilities of our tool. Section 6describes the case study, whereas Sect. 7 contains our ex-perimental results. Finally, Sect. 8 concludes the paperand suggests future work.
2 Related work
Springintveld et al. proved in [39] that exhaustive testingwith respect to trace equivalence of deterministic timedautomata with a dense time interpretation is theoretic-ally possible, but highly infeasible in practice. Exhaustivehere means that every incorrect implementation wouldbe rejected by some test case. Another result generatingchecking sequences for a discretized deterministic timed

B. Nielsen, A. Skou: Automated test generation from timed automata 63
automaton is presented by En-Nouaary et al. in [23]. Al-though the required discretization step size (1/(|X|+2),where |X| is the number of clocks) in [23] is more reason-able than [39], it still appears to be too small for mostpractical applications because too many tests are gener-ated. The technique in [23] produces 30 test cases givena simple specification timed automaton modelling an on-off switch and consisting of two locations, two edges anda maximum clock constant of one.Both of these techniques are based on computing
checking sequences from the so called region graph tech-nique due to Alur and Dill [1]. Clock regions are veryfine-grained equivalence classes of clock valuations. Weargue that coarser partitions are needed in practice. Fur-ther, our equivalence class partitioning as well as the usedsymbolic techniques are much less sensitive to the clockconstants and the number of clocks appearing in the spe-cification compared to the region construct.Cardell-Oliver and Glover showed in [15] how to de-
rive checking sequence from a discrete time, determin-istic, timed transition system model. Their approach isimplemented in a tool that is applied to a series of smallcases. Their result indicates that the approach is feasible,at least for small systems, but problems arise if the imple-mentation has more states than the specification. No testselection with respect to the time dimension is performed,i.e., an action is taken at all the time instances it is en-abled. This work has recently been carried to a restrictedtimed automata model [14] in which a discretization stepof 1 suffices. Observe that this cannot ensure that equiva-lence classes as proposed in this paper can be covered bya test. Moreover, it does not present an effective solutionto the test selection problem, and the complexity remainshighly dependent on the clock constants that appear inthe specification.Clarke and Lee [17, 18] also propose domain testing
for real-time systems. Although their primary goal ofusing testing as a means of approximating verificationto reduce the state explosion problem is different fromours, their generated tests could potentially be applied tophysical systems as well. Their technique appears to pro-duce much fewer tests than region-based generation. Thetime requirements are specified as directed acyclic graphscalled constraint graphs. Compared to timed automatathis specification language appear very restricted, e.g.,because their constraint graphs must be acyclic this onlypermits specification of finite behaviors. Their domainsare “nice” linear intervals that are directly available in theconstraint graph. In our work they are (convex) polyhe-dra of a dimension equal to the number of clocks.Braberman et al. [12] describe an approach where
a structured analysis/structured design real-time modelis represented as a timed Petri net. Analysis methodsfor timed Petri nets based on constraint solving can beused to generate a symbolic timed reachability tree up toa predefined time bound. From this, specific timed testsequences can be chosen. This work shares with ours the
generation of tests from a symbolic representation of thestate space. We guarantee coverage according to a well-defined criterion without reference to a predefined or ex-plicitly given upper time bound. The paper also proposesother selection criteria, mostly based on the type andorder of the events in the trace. However, they are con-cerned with generating traces only, and not on deadlockproperties as we are. The paper describes no specific datastructures or algorithms for constraint solving, and statesno results regarding their efficiency. Their approach doesnot appear to be implemented.Castanet et al. presents in [16] an approach where
timed test traces can be generated from timed automataspecifications. Test selection must be done manually bythe enginerers by specifying a test purposes for each testin the form of deterministic acyclic timed automata. Suchexplicit test selection reduces the state explosion prob-lem during test generation, but leaves a significant burdenon the engineer. Further, the test sequences appear to besynthesized from paths available directly in an interme-diate timed automaton formed by a synchronous productof the specification and the test purpose, and not froma (symbolic) interpretation thereof. This approach there-fore risks generating tests that need not be passed by theimplementation, or not finding a test satisfying the testpurpose when one in fact exists.Finally, test generation from a discrete time temporal
logic is investigated by [30].
3 Preliminaries
3.1 Hennessy tests
In Hennessy’s testing theory [31] specifications S aredefined as finite state labelled transition systems overa given finite set of actions Act. In addition, it assumesthat implementations I (and specifications) can be ob-served by finite tests T via a sequence of synchronousCCS-like communications. The implementation undertest is composed in parallel (using a CCS-like parallelcomposition operator ‖) with a process modelling thetester, and consequently, the execution of a test con-sists of a finite sequence of communications forminga so-called computation – denoted by Comp(T ‖ I) (orComp(T ‖ S)). A test execution is assigned a verdict(pass, fail or inconclusive), and a computation is success-ful if it terminates after an observation having the verdictpass.Hennessy tests have the following abstract syntax
Ltlts: (1) after σmust A, (2) can σ, and (3) after σmust ∅, where σ ∈ Act∗ and A ⊆ Act. Informally, (1) issuccessful if at least one of the observations in A (calleda must set) can be observed whenever the trace σ is ob-served, (2) is successful if σ is a prefix of the observedsystem, and (3) is successful if this is not the case (i.e.,σ is not a prefix).

64 B. Nielsen, A. Skou: Automated test generation from timed automata
The basic idea in Hennessy’s testing theory is to com-pare systems based on the tests they pass: two systemsare regarded as equivalent if no experimenter can distin-guish them by executing tests. Hennessy’s testing equiv-alence thus requires that the specification and implemen-tation exactly passes the same tests. Similarly, the testingpreorder requires that the implementation passes at leastthe same tests as the specification.Because some computations of a test may yield suc-
cess and some may not, there are two possible definitionsof passing a test. One is that an implementation passesa test if the possible executions may report success, i.e.,at least one of the possible computations is required to re-port success. The other choice is that an implementationpasses a test if the possible executions must report suc-cess, i.e., all computations are required to report success.The must (may) preorder requires that every test
that must (may) be passed by the specification must(may) also be passed by the implementation. In non-deterministic systems these notions do not coincide. Thetesting preorder defined formally in Definition 1 requiressatisfaction on both the must and may preorders.
Definition 1. The testing preorder �te:
1. S must T iff ∀Σ ∈ Comp(T ‖ S). Σ is successful.2. S may T iff ∃Σ ∈Comp(T ‖ S). Σ is successful.3. S �must I iff∀T ∈ Ltlts. S must T implies I must T
4. S �may I iff∀T ∈ Ltlts. S may T implies I may T
5. S �te I iff S �must I and S �may I�
A further relation called conf proposed by Brinksma[13] is commonly used in the field of protocol conformancetesting. It is similar to the must preorder except that itonly considers must tests with traces in the specification,i.e., tests of the form after σmust A with σ ∈ Tr(S).The examples in Fig. 4 compare the merits of the dif-
ferent implementation relations, and illustrate that theimportance of making the right choice of relations.First compare the vending machine specifications S1
and S2. The specification S1 requires that an implemen-tation after accepting a coin enables the environment tochoose between tea and coffee. S2 would be a faulty im-plementation using either the conformance or the mustpreorder, because it chooses internally whether to en-able tea or coffee. S1 and S2 are distinguishable by thetest after coin must {cof } that S1 always passes, but S2does not. However, S1 and S2 are indistinguishable by themay preorder.S2 can be interpreted as a specification that allows
the implementor to choose between implementing a coffeeor a tea machine (or both). S3 is a legal implementationof S2 according to the must and conformance preorder,but not according to the may preorder: S2 may coin · cofpassed by S2 but never by S3. The may preorder ensures
Fig. 4. For different coffe machines modelled aslabelled transition systems
that every behavior that can be exhibited by the specifi-cation can also be exhibited by the implementation, i.e.,it checks the robustness or liveness aspects of the imple-mentation.S4 is a deterministic alternative that does not have the
same problem as S2. However, it is able to sell vodka inaddition to tea and coffee. If the goal is to ensure thatwe can buy coffee or tea, thus using the conformance re-lation, we can safely accept S4 as an implementation,i.e., S4 conf S1. However, such extended functionalitymay be catastrophic e.g., selling alcoholic drinks to mi-nors, or splashing coffee on the floor when no coins andcups have been inserted. The must preorder does not per-mit such added behavior, as demonstrated by the testafter coin · vodka must ∅ that S1 passes, but not S4.A must test after σmust A can be generated from
a specification by 1) finding a trace σ in the specifica-tion, 2) computing the states that are reachable after thattrace, and 3) computing a set of actions A that must beaccepted in these states. To facilitate and ease systematicgeneration of all relevant tests, the specification can beconverted to a success graph (or acceptance graph [19])data structure. A success graph is a deterministic statemachine trace equivalent to the specification, and whosenodes are labeled with the must sets holding in that node,the set of actions that are possible, and the actions thatmust be refused.We propose a simple timed generalization of Hen-
nessy’s tests. In a timed test after σmust A (or after σmust ∅), σ becomes a timed trace (a sequence of alter-nating actions and time delays), after which an actionin A must be accepted immediately. Similarly, a testcan σ (after σmust ∅) becomes a timed trace satisfiedif σ is (is not) a prefix trace of the observed system.A test will be modelled by an executable timed automa-ton whose locations are labelled with pass, fail, or incon-clusive verdicts.
B. Nielsen, A. Skou: Automated test generation from timed automata 65
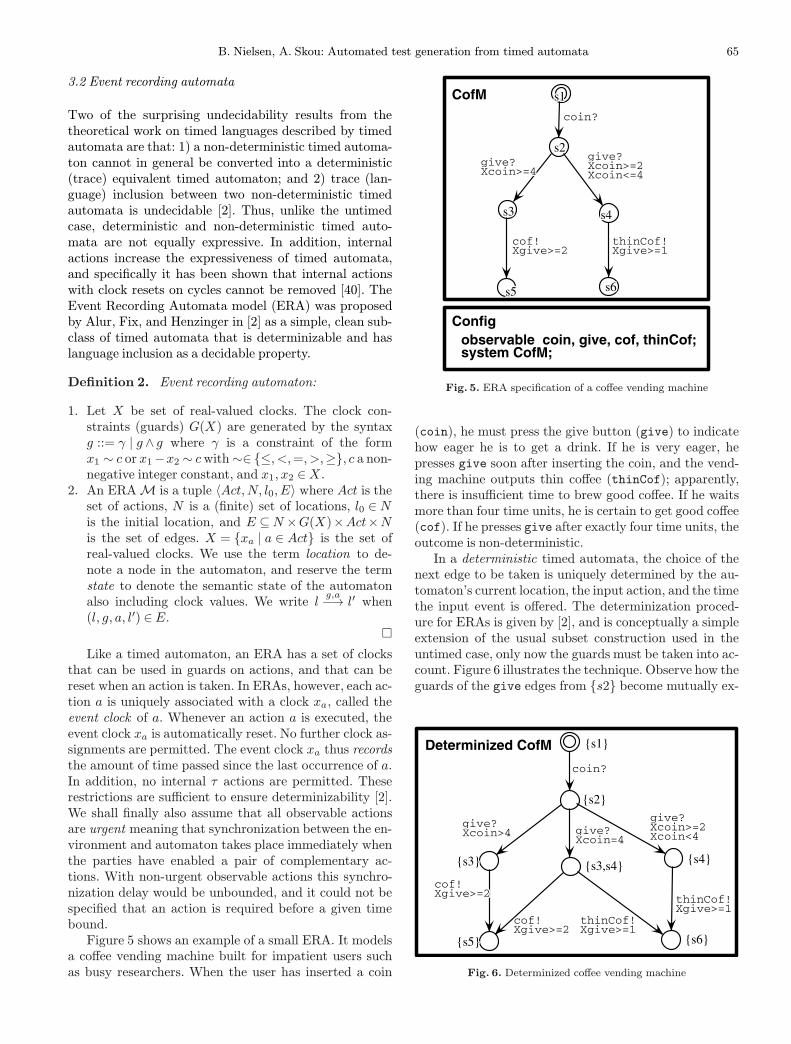
3.2 Event recording automata
Two of the surprising undecidability results from thetheoretical work on timed languages described by timedautomata are that: 1) a non-deterministic timed automa-ton cannot in general be converted into a deterministic(trace) equivalent timed automaton; and 2) trace (lan-guage) inclusion between two non-deterministic timedautomata is undecidable [2]. Thus, unlike the untimedcase, deterministic and non-deterministic timed auto-mata are not equally expressive. In addition, internalactions increase the expressiveness of timed automata,and specifically it has been shown that internal actionswith clock resets on cycles cannot be removed [40]. TheEvent Recording Automata model (ERA) was proposedby Alur, Fix, and Henzinger in [2] as a simple, clean sub-class of timed automata that is determinizable and haslanguage inclusion as a decidable property.
Definition 2. Event recording automaton:
1. Let X be set of real-valued clocks. The clock con-straints (guards) G(X) are generated by the syntaxg ::= γ | g∧ g where γ is a constraint of the formx1 ∼ c or x1−x2 ∼ cwith∼∈ {≤, <,=, >,≥}, c a non-negative integer constant, and x1, x2 ∈X.
2. An ERAM is a tuple 〈Act,N, l0, E〉 where Act is theset of actions, N is a (finite) set of locations, l0 ∈Nis the initial location, and E ⊆N ×G(X)×Act×Nis the set of edges. X = {xa | a ∈ Act} is the set ofreal-valued clocks. We use the term location to de-note a node in the automaton, and reserve the termstate to denote the semantic state of the automatonalso including clock values. We write l
g,a−→ l′ when
(l, g, a, l′) ∈E.�
Like a timed automaton, an ERA has a set of clocksthat can be used in guards on actions, and that can bereset when an action is taken. In ERAs, however, each ac-tion a is uniquely associated with a clock xa, called theevent clock of a. Whenever an action a is executed, theevent clock xa is automatically reset. No further clock as-signments are permitted. The event clock xa thus recordsthe amount of time passed since the last occurrence of a.In addition, no internal τ actions are permitted. Theserestrictions are sufficient to ensure determinizability [2].We shall finally also assume that all observable actionsare urgent meaning that synchronization between the en-vironment and automaton takes place immediately whenthe parties have enabled a pair of complementary ac-tions. With non-urgent observable actions this synchro-nization delay would be unbounded, and it could not bespecified that an action is required before a given timebound.Figure 5 shows an example of a small ERA. It models
a coffee vending machine built for impatient users suchas busy researchers. When the user has inserted a coin
give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin<=4Xcoin<=4Xcoin<=4Xcoin<=4Xcoin<=4Xcoin<=4Xcoin<=4Xcoin<=4Xcoin<=4Xcoin<=4Xcoin<=4Xcoin<=4Xcoin<=4Xcoin<=4Xcoin<=4Xcoin<=4Xcoin<=4
give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?Xcoin>=4Xcoin>=4Xcoin>=4Xcoin>=4Xcoin>=4Xcoin>=4Xcoin>=4Xcoin>=4Xcoin>=4Xcoin>=4Xcoin>=4Xcoin>=4Xcoin>=4Xcoin>=4Xcoin>=4Xcoin>=4Xcoin>=4
coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?
cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2
thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1
s4s4s4s4s4s4s4s4s4s4s4s4s4s4s4s4s4s3s3s3s3s3s3s3s3s3s3s3s3s3s3s3s3s3
s2 s2 s2 s2 s2 s2 s2 s2 s2 s2 s2 s2 s2 s2 s2 s2 s2
s1s1s1s1s1s1s1s1s1s1s1s1s1s1s1s1s1
s5s5s5s5s5s5s5s5s5s5s5s5s5s5s5s5s5 s6s6s6s6s6s6s6s6s6s6s6s6s6s6s6s6s6
ConfigConfigConfigConfigConfigConfigConfigConfigConfigConfigConfigConfigConfigConfigConfigConfigConfigobservable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;observable coin, give, cof, thinCof;system CofM;system CofM;system CofM;system CofM;system CofM;system CofM;system CofM;system CofM;system CofM;system CofM;system CofM;system CofM;system CofM;system CofM;system CofM;system CofM;system CofM;
CofMCofMCofMCofMCofMCofMCofMCofMCofMCofMCofMCofMCofMCofMCofMCofMCofM
Fig. 5. ERA specification of a coffee vending machine
(coin), he must press the give button (give) to indicatehow eager he is to get a drink. If he is very eager, hepresses give soon after inserting the coin, and the vend-ing machine outputs thin coffee (thinCof); apparently,there is insufficient time to brew good coffee. If he waitsmore than four time units, he is certain to get good coffee(cof). If he presses give after exactly four time units, theoutcome is non-deterministic.In a deterministic timed automata, the choice of the
next edge to be taken is uniquely determined by the au-tomaton’s current location, the input action, and the timethe input event is offered. The determinization proced-ure for ERAs is given by [2], and is conceptually a simpleextension of the usual subset construction used in theuntimed case, only now the guards must be taken into ac-count. Figure 6 illustrates the technique. Observe how theguards of the give edges from {s2} become mutually ex-
thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1
cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2
give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin>=2Xcoin<4Xcoin<4Xcoin<4Xcoin<4Xcoin<4Xcoin<4Xcoin<4Xcoin<4Xcoin<4Xcoin<4Xcoin<4Xcoin<4Xcoin<4Xcoin<4Xcoin<4Xcoin<4Xcoin<4
give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?Xcoin>4Xcoin>4Xcoin>4Xcoin>4Xcoin>4Xcoin>4Xcoin>4Xcoin>4Xcoin>4Xcoin>4Xcoin>4Xcoin>4Xcoin>4Xcoin>4Xcoin>4Xcoin>4Xcoin>4 give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?give?
Xcoin=4Xcoin=4Xcoin=4Xcoin=4Xcoin=4Xcoin=4Xcoin=4Xcoin=4Xcoin=4Xcoin=4Xcoin=4Xcoin=4Xcoin=4Xcoin=4Xcoin=4Xcoin=4Xcoin=4
coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?coin?
cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!cof!Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2Xgive>=2
thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!thinCof!Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1Xgive>=1
{s4}{s4}{s4}{s4}{s4}{s4}{s4}{s4}{s4}{s4}{s4}{s4}{s4}{s4}{s4}{s4}{s4}{s3}{s3}{s3}{s3}{s3}{s3}{s3}{s3}{s3}{s3}{s3}{s3}{s3}{s3}{s3}{s3}{s3}
{s2} {s2} {s2} {s2} {s2} {s2} {s2} {s2} {s2} {s2} {s2} {s2} {s2} {s2} {s2} {s2} {s2}
{s1}{s1}{s1}{s1}{s1}{s1}{s1}{s1}{s1}{s1}{s1}{s1}{s1}{s1}{s1}{s1}{s1}
{s5}{s5}{s5}{s5}{s5}{s5}{s5}{s5}{s5}{s5}{s5}{s5}{s5}{s5}{s5}{s5}{s5} {s6}{s6}{s6}{s6}{s6}{s6}{s6}{s6}{s6}{s6}{s6}{s6}{s6}{s6}{s6}{s6}{s6}
{s3,s4}{s3,s4}{s3,s4}{s3,s4}{s3,s4}{s3,s4}{s3,s4}{s3,s4}{s3,s4}{s3,s4}{s3,s4}{s3,s4}{s3,s4}{s3,s4}{s3,s4}{s3,s4}{s3,s4}
Determinized CofMDeterminized CofMDeterminized CofMDeterminized CofMDeterminized CofMDeterminized CofMDeterminized CofMDeterminized CofMDeterminized CofMDeterminized CofMDeterminized CofMDeterminized CofMDeterminized CofMDeterminized CofMDeterminized CofMDeterminized CofMDeterminized CofM
Fig. 6. Determinized coffee vending machine

66 B. Nielsen, A. Skou: Automated test generation from timed automata
clusive such that either both are enabled, or only one ofthem is.
3.3 Symbolic representation
Timed automata with a dense time interpretation cannotbe analyzed by finite state techniques, but must ratherbe analyzed symbolically. Efficient symbolic reachabilitytechniques have been developed for model checking oftimed automata [6, 9, 22, 27, 41]. Specifically, we shall em-ploy similar techniques as those developed for the Upp-Aal tool [6, 27, 41].The state of a timed automaton can be represented by
the pair 〈l, u〉, where l is the automaton’s current loca-tion (vector), and where u is the vector of its current clockvalues. A zone z is a conjunction of clock constraints ofthe form x1 ∼ c or x1−x2 ∼ c with ∼∈ {≤, <,=, >,≥},or equivalently, the solution set to these constraints.Viewed graphically, the solution set of a zone forms a con-vex polyhedron of a number of dimensions correspondingto the number of clocks. A symbolic state [l, z] representsa (infinite) set of states: {〈l, u〉 | u ∈ z}, see the example inFig. 7.Zones can be represented and manipulated efficiently
by the difference bound matrix (DBM) data structure [5].DBMs were first applied to represent clock differencesby Dill in [22]. A DBM represents clock difference con-straints of the form xi−xj ≺ cij by a (n+1)× (n+1)matrix where n is the number of clocks, and≺∈ {≤, <}.An efficient set of operations on zones allows the fol-
lowing to be computed:
– The symbolic state that results by taking an edge froma given source symbolic state can be computed.– The reachable state space can be computed. Forwardreachability analysis starts in the initial state (l0, 0),and computes the symbolic states that can be reachedby executing an action from an existing one, or by let-ting time pass. When a new symbolic state is included
〈s2,Xcoin = 2.00Xgive = 3.14
〉
[s2, z],z=Xgive ≥ 1∧Xcoin ≤ 4∧Xgive−Xcoin ≤ 3
a b
0 XcoinXgive0 × 4 7Xcoin 0 × 3Xgive−1 3 ×
c d
Fig. 7a–d. State of a timed automaton (a), a symbolicstate (b), a polyhedron containing the solution set
to zone z, and DBM for zone z (d)
in one previously visited, no further exploration of thenew state needs to take place. Forward reachabilitythus terminates when no new states can be reached.– Given a symbolic path to a symbolic state, a concretetimed trace leading to it (or subset thereof) can becomputed by back propagating its constraints alongthe symbolic path used to reach it, and by choosingspecific time points along this trace.
To ensure soundness (in the sence that failing a testimplies that the implemenation is incorrect) of the pro-duced tests, symbolic reachability analysis is needed toselect only states for testing that are reachable, and tocompute only timed traces that are actually part of thespecification.
3.4 Timed trace computation
When a desired target symbolic state is reached, it canbe concluded that all concrete states in the symbolic tar-get states are reachable. However, it is not ensured thatall states along the path of symbolic states used to reachit, necessarily will end in a state in the target symbolicstate, but only that some of the states traversed un-derway will end up in the target state. Therefore, whena trace leading to the desired target is to be computed,the trace must only pass through the states that canreach the desired target. It is relatively straight forwardto compute the preconditions for the required subsetsby back-propagating the zone constraints of the targetstates back along the path used to reach it. Back propaga-tion results in a strengthened symbolic trace representinga (possibly infinite) set of concrete traces leading to thetarget.From this set the tester can choose a specific trace by
controlling when actions are offered and observed, i.e., bychoosing the specific delay to wait between actions. Thisprocess is started at the initial state. The possible delaysthat can be chosen are defined by the strengthened sym-bolic states. Let D be the set of possible delays before anaction. There are three immediate strategies for choosingdelays:
1. Choose the smallest delay d ∈ D. This checks thepromptness of the implementation by executing thesucceeding action at the earliest time possible in thecurrent trajectory.
2. Choose the delay (possibly stochastically) to be in theinterior of D. This checks the persistence of the im-plementation, i.e., that the succeeding action can beexecuted in the interior of its enabling interval.
3. Choose the delay to be the largest delay in D. Thistests the patience of the system, i.e., that the suc-ceeding action is also executable at the latest requiredenabled time.
Of the above strategies, it seems most important tocheck the promptness of the system as this checks formissed deadline errors, which are common in real-time

B. Nielsen, A. Skou: Automated test generation from timed automata 67
systems. However, also the patience may be important,because this may detect errors where a timer times outprematurely.
3.5 Domain-based test selection
It is important to systematically select and generatea limited amount of tests, because exhaustive testing isgenerally infeasible. A test selection criterion (or cov-erage criterion) is a rule describing what behavior orrequirements should be tested. Coverage is a metric ofcompleteness with respect to a test selection criterion.In industrial projects it is highly desirable that there issuch a well defined metric of the testing thoroughness,and that this can be measured.As previously stated, our approach is inspired by se-
quential black-box testing techniques frequently referredto as domain- or partition testing [4]. We regard theclocks of a timed specification as (oddly behaving) inputparameters.To exemplify the analogy, consider the ‘maxPositive’
function specified below to return the maximum positivevalue of two arbitrary integers, x and y. If both argumentsare less than zero the function is to return zero:
maxPositive(x, y) =defmax(0,max(x, y))
max=def
{x, if x > y
y, otherwise
Obviously, this function cannot be tested with all possiblepairs of integers as inputs. A systematic strategy for deal-ing with this problem is to partition the input variablesinto input domains, i.e., sets of inputs that the programis expected to treat “identically” (e.g., pass through thesame program path), and choose only a few representa-tives from each domain.For the ‘maxPositive’ example, one might use four
domains, one for each of the four cases in the specifi-cation. The resulting domains, tabulated in Table 1, aredescribed as inequations of x and y whose solution set isdepicted in Fig. 8. Test input data can be derived from theinequations that define each domain. Concluding correct-ness from testing with only a few representatives requiresa uniformity hypothesis stating that if the implementa-tion is correct for one input in the domains, it is correctfor all. To support this hypothesis boundary value analy-sis is applied by selecting several extreme values in the
Table 1. Proposed domains for maxPositive function
domain condition expected output
1 x < 0∧x > y 02 y < 0∧x≤ y 03 x≥ 0∧x > y x
4 y ≥ 0∧x≤ y y
y
x
Fig. 8. Visualization of proposed do-mains for the maxPositive function
domain. Thus, at least four test cases should be gener-ated, but usually several interior and extreme values arechosen.For real-time systems we propose to partition the
clock valuations into domains and ensure that each suchdomain is tested systematically. Similarly, the concept ofextreme values carries over to the time domain to meanextreme clock valuations close to the borders of clockvalue domains. However, observe that clock values are notparameters that can be directly supplied to a function,but can only be controlled implicitly by stimulating thetarget system by a timed trace of events.
4 A test generation algorithm
Our equivalence class partitioning and coverage criterionare introduced intuitively in Sect. 4.1. The equivalenceclass partitioning is defined formally in Sect. 4.2. An algo-rithm for constructing the equivalence classes of a speci-fication is provided in Sect. 4.3. The test generation algo-rithm is presented in Sect. 4.4.
4.1 Selection criterion
The implementation relation in Definition 1 specifieswhat test cases are necessary and what structure theymust have: only those Hennessy tests passed by the spe-cification are relevant and need to be generated andexecuted. However, even with this restriction exhaustivetesting requires an infinite number of test cases, and notest case is in theory expendable. In practice there is onlyresources to execute a finite and very limited subset, andconsequently, test selection must be employed to computean executable subset.We propose a selection criterion based on partitioning
the state space of the specification into coarse equivalenceclasses, and requiring that the test suite for each classmakes a set of required observations of the implementa-tion when it is expected to be in a state in that class.These observations are used to increase the confidencethat the equivalence classes are correctly implemented.

68 B. Nielsen, A. Skou: Automated test generation from timed automata
The partitioning and observations can be done in numer-ous ways, and some options are explored and formallydefined in [32].Given the partitioning stated in the following, the sta-
ble edge set criterion implemented in RTCAT requiresthat all relevant simple deadlock observations of the formafter εmust A (a must property), after amust ∅ (alsocalled cannot a, a refusal property), and can a (a mayproperty) are made at least once in each class. Theseproperties are derived from the correctness criterion, thetesting preorder.Consider the (determinized) coffee vending machine
from Fig. 6. We propose to partition the clock valuationsinto domains, e.g., for location {s3, s4} we argue thatthere are three important cases: domain 1 where neitherof the outgoing edges are enabled, domain 2 where thethinCof edge is enabled, but not the cof edge, and do-main 3 where both are enabled, see Fig. 9.The idea behind this partitioning is that the speci-
fication remains stable with respect to the locations itmight occupy (recall that it may be non-deterministic),and the edges that might be enabled; only the clock valuesare changing. The hypothesis is that a correct implemen-tation is also stable because no new actions need to beenabled or disabled to match the behavior of the speci-fication. In contrast, when its locations or enabled edgeschange, some internal action (e.g., a clock interrupt) musttrigger the implementation causing it to change state, andhence, its behavior should be reexamined.In general we propose an equivalence class for each
subset of edges possibly enabled from each subset of lo-cations. Each such class is decorated with the simpledeadlock observations satisfied in that class, see Fig. 10.A test case consists of a timed trace leading to a de-sired state in an equivalence class followed by one of thesimple deadlock observations. Suppose the implementa-tion erroneously allowed coffee to be produced imme-diately after a coin was entered and give was pushedafter 4 time units. The specification would then oc-cupy class [{s3, s4}, Xgive< 1] that satisfies the property
Xgive
Xcoin
Fig. 9. Visualization of the proposed clockvaluation domains for the coffee vending
machine location {s3, s4}
cannot coin
cannot give
cannot give
cannot coin
cannot cof
cannot give
cannot thinCof
cannot cof
can thinCof
can cof
can thinCof
must{ cof, thinCof}
cannot coin
p5 :Xgive≥ 2
[{s3, s4}, p5] [{s3, s4}, p7]
p7 :Xgive < 1p6 :Xgive∈[1, 2)
[{s3, s4}, p6]
Fig. 10. Three examples of decorated equivalence classes (coffeemachine)
cannot cof , see Fig. 10. The coverage criterion guar-antees that a test is generated that could detect this(particular) error.In general there is a tradeoff between partition size,
error detection capability, the strength of the requireduniformity hypothesis, and the number of required testcases, and thus the cost of the test suite. The finer the par-titioning, the higher cost of generating and executing thetest suite. Our partitioning is based on the guards thatactually occur in a specification, and is therefore muchcoarser than, for example, the region partitioning which isbased on the guards that could possibly occur in an ERA(Definition 2).A finer partitioning like covering the regions of a speci-
fication results in an increased timewise resolution of thetest suite, i.e., the edges will be visited with many more(timed) test points, thus increasing the likelihood of de-tecting erroneously implemented guards, but it is import-ant to note that it does not examine more actions or edgesthan ours, because our reachability analysis guaranteesthat every (reachable) action or edge will be covered by atleast one test. Covering the region graph also appear to beextremely costly in terms of the number of required testsboth in theory [39] and in practice [23].Our partitioning has the nice formal property that the
states in the same equivalence class are also equivalentwith respect the previously stated simple deadlock prop-erties. This follows from the absence of τ actions, and thefact that only enabled edges, and not the precise clockvalues, affect the satisfaction of these properties. In con-trast, different equivalence classes typically satisfy differ-ent simple deadlock properties. It is therefore natural tocheck that the implementation matches these propertiesfor each equivalence class. Using an even coarser parti-tioning is therefore likely to leave out significant timingand deadlock behavior.Our approach provides a heuristic that guarantees
that a well-defined set of interesting scenarios in the spe-cification has been automatically, completely, and sys-tematically explored.
4.2 State partitioning
From each control location L (recall that a location ina determinized automaton is the set of locations of the

B. Nielsen, A. Skou: Automated test generation from timed automata 69
original automaton that the automaton can possibly oc-cupy after a given trace), the clock valuations are parti-tioned such that two clock valuations belong to the sameequivalence class iff they enable precisely the same edgesfrom L, i.e., the states are equivalent with respect to theenabled edges.An equivalence class will be represented by a pair
[L, p], where L is a set of location vectors, and p is the in-equation describing the clock constraints that must holdfor that class, i.e., [L, p] is the set of states {〈L, u〉 | u ∈ p}.Further, to obtain equivalence classes that are contigu-ous convex polyhedra, and to reuse the existing efficientsymbolic techniques, this constraint is rewritten to its dis-junctive normal form. Each disjunct is treated as its ownequivalence class. The partitioning from a given set of lo-cations is defined formally in Definition 3.
Definition 3. State partitioning Ψ(L):Let L be a set of location vectors, E(L) the set of edgesstarting in a location vector in L, E a set of edges, andΓ(E) = {g | l
g,a−→ l′ ∈ E}. Recall from Definition 2 that
G(X) denotes the guards generated by the syntax g ::=γ | g∧ g where γ is a basic clock constraint of the formx1 ∼ c or x1−x2 ∼ c.Let P be a constraint over clock inequations γ com-
posed using any of the logical connectives ∧,∨, or ¬.Let DNF(P ) denote a function that rewrites constraint Pto its equivalent disjunctive normal form, i.e., such that∨i
∧j γij = P . Each conjunct in the disjunctive form can
be written as a guard g in G(X) by appropriately negat-ing basic clock constraints where required. The disjunctivenormal form can therefore be interpreted as a disjunctionof guards such that
∨i gi =
∨i
∧j γij. The set of guards
gi whose disjunction equals the disjunctive normal form isdenoted GDNF, i.e., GDNF(PE) = {gi ∈G(X) |
∨i gi =
p0 : tt
p5 :Xgive ≥ 2give?
give?
thinCof!
cof!
coin?
[{s1}, p0]
thinCof!
give?
p6 :Xgive∈[1, 2)
[{s3, s4}, p6]
coin?
coin?
[{s3, s4}, p5]
[{s6}, p12]
p12 : tt
[{s5}, p13]
p13 : tt
p7 :Xgive < 1
[{s3, s4}, p7]
[{s2}, p1]
p1 :Xcoin= 4
coin?
give?
give?
give?[{s3}, p10]
give?
thinCof!
cof!
[{s2}, p2]
p2 :Xcoin ∈ [2, 4)
p3 :Xcoin > 4
[{s2}, p4]
p4 :Xcoin < 2
[{s3}, p11]
p10 :Xgive≤ 2
p11 :Xgive < 2
p8 :Xgive ≥ 1
[{s4}, p9]
p9 :Xgive < 1
[{s4}, p8][{s2}, p3]
Fig. 11. Equivalence class graph for the coffee machine
DNF(PE)}.
1.Ψ(L) = {PE | E ∈ 2E(L)},where
PE =∧
g∈Γ(E)
g ∧∧
g∈Γ(E(L)−E)
¬g
2.Ψdnf(L) =⋃
PE∈Ψ(L)
GDNF(PE)
�
The equivalence classes for the coffee vending machineis depicted in Fig. 11. Each equivalence class [L, p] cannow be decorated with the action setsM,C,R defined inDefinition 4. Some examples are shown in Fig. 10.
Definition 4. Decorated equivalence classes:Define Sort([L, p]) = {a | ∃〈L, u〉 ∈ [L, p]. 〈L, u〉
a−→}, and
Must([L, p]) = {A | ∃〈L, u〉 ∈ [L, p]. 〈L, u〉 |= after εmust A}
1. M([L, p]) =Must([L, p]).2. C([L, p]) = Sort([L, p]).3. R([L, p]) =Act−Sort([L, p]).
�
M contains the sets of actions necessary to generate themust tests, C the may tests, and R the refusal testsfor that class. Specifically, if σ is a timed trace leadingto class [L, p], and A ∈M([L, p]) then after σmust Ais a test to be passed for that class. So is after σ ·amust ∅ if a ∈ R([L, p]), and can σ ·a if a ∈ C([L, p]).The number of generated tests can be further reducedby removing tests that are logically passed by anothertest, i.e., the must sets can be reduced to M([L, p]) =min⊆Must([L, p]) (where min⊆(M) gives the set of min-imal elements of M under subset inclusion), and the

70 B. Nielsen, A. Skou: Automated test generation from timed automata
actions observed during the execution of a must testcan be removed from the may tests, i.e., C([L, p]) =Sort([L, p])−
⋃A∈M([L,p])A.
4.3 Equivalence class graph construction
We view the state space of the specification as a graphof equivalence classes. A node in this graph contains anequivalence class. An edge between two nodes is labeledwith an observable action, and represents the possibilityof executing an action in a state in the source node, wait-ing some amount of time, and thereby entering a statein the target node. The graph is constructed by start-ing from an existing node [L, p] (initially the equivalenceclasses of the initial location), and then for each enabledaction a, by computing the set of locations L′ that canbe entered by executing the a action from the equivalenceclass. Then the partitions p′ of location L′ can be com-puted according to Definition 3 (2). Every [L′, p′] is thenan a successor of [L, p]. It should be noted that only equiv-alence classes whose constraints have solutions need to berepresented. The equivalence class graph is defined induc-tively in Definition 5. This definition can easily be turnedinto an algorithm for constructing the equivalence classgraph.
Definition 5. Equivalence class graph:The nodes and edges are defined inductively as:
1. The set {[L0, p] | L0 = {l0}, p ∈Ψdnf(L0), and p �= ∅}are nodes.
2. If [L, p] is a node, so is [L′, p′], and [L, p]a−→ [L′, p′] is an
edge if p′ �= ∅, whereL′ = {l′ | ∃l ∈ L. l
g,a−→ l′}, and p′ ∈Ψdnf(L′).
�The construction algorithm implicitly determinizes
the specification, but preserves the non-determinism ofthe original specification. The equivalence class graphpreserves all timed traces of the specification, and fur-thermore preserves the required deadlock informationfor our timed Hennessy tests of the specification bythe M , C, and R action sets stored in each node. Thenon-determinism found in the original specification istherefore maintained, but is represented differently, andin a way that is more convenient for test generation:a test is composed of a trace, a deadlock observationpossible in the specification thereafter, and associatedverdicts, and this information can be found simply by fol-lowing a path in the equivalence class graph. All timedHennessy tests that the specification passes can thusbe generated from this graph. The explicit graph alsomakes it easy to ensure coverage according to the cover-age criterion by marking the visited parts of the graphduring test generation. However, note that we do notassume that all nondeterministic choices (and conse-quently branches of a test case) are revealed during testexecution.
In addition, note that the determinization allows theequivalence classes to be computed (relatively) efficiently;there is no need to form every subset of edges in theentire specification, only of those edges from the samelocation in the determinized automaton. The equiva-lence class graph for the coffee machine is depicted inFig. 11.
4.4 Overall algorithm
The equivalence class graph preserves the necessary in-formation for generating timed Hennessy tests. How-ever, it also contains behavior and states not foundin the specification, and using such behavior will re-sult in irrelevant and unsound tests. An unsound testmay produce the verdict fail even when the imple-mentation conforms to the specification. According tothe testing preorder only tests passed by the specifi-cation should be generated. To ensure soundness, onlythe traces and deadlock properties actually containedin the specification may be used in a generated test.To find these, we therefore interpret the specificationsymbolically, and generate the timed Hennessy testsfrom a representation of only the reachable states andbehavior.For instance, no test can be constructed that must be
passed by the specification that checks the behavior ofthe coffee vending machine in state 〈{s3, s4}, (Xcoin = 2,Xgive = 2)〉, because whenever the automaton occupieslocation {s3, s4}, clock Xcoin is at least 4. Similarly, itmay be necessary to unfold loops in the equivalence classgraph several time to ensure that all reachable classesare visited by a test. An example of this is provided inSect. 6.1.Moreover, the use of reachability analysis gives a ter-
mination criterion for the symbolic interpretation; whencompleted it guarantees that every reachable equivalenceclass is represented by some symbolic state. Thus, weare able to guarantee coverage by inspecting the reachedsymbolic states.Algorithm 1 presents the main steps of our generation
procedure. Step 1 constructs the equivalence class graphas described in Sect. 4.2. The result of step 2 is a symbolicreachability graph. Nodes in this graph consist of symbolicstates [L, z/p] where L is a set of location vectors, andwhere z is a constraint characterizing a set of reachableclock valuations also in p, i.e., z ⊆ p. An edge representsthat the target state is reachable by executing an actionfrom the source state and then waiting some amount oftime.The nodes in the reachability graph are decorated ac-
cording to Definition 4 in step 3. Step 4 initializes anempty set that contains the symbolic states from whichtests have be generated so far.
Algorithm 1. Overall test case generation algorithm:input: ERA specification S.

B. Nielsen, A. Skou: Automated test generation from timed automata 71
output: A covering set of relevant timed Hennessyproperties.
1. Compute Sp = Stable Edge Set Partition Graph(S).2. Compute Sr =Reachability(Sp).3. Label every [L, z/p] ∈ Sr with the setsM , C, R.4. Tested := ∅5. Traverse Sr. For each [L, z/p] in Sr:if �∃z′. [L, z′/p] ∈ Tested thenTested := Tested ∪{[L, z/p]}, and enumerate tests:
(a)Choose 〈l, u〉 ∈ [L, z/p](b)Compute a concrete trace σ from 〈l0, 0〉 to 〈l, u〉.(c) Make Test Cases:if A ∈M([L, p]) then after σmust A is a relevanttest.if a ∈ C([L, p]) then can σ ·a is a relevant test.if a ∈R([L, p]) then after σ ·amust ∅ is a relevanttest.
�Step 5 contains the generation process itself. Note
that the same partition may be traversed many timesduring forward reachability analysis. The coverage cri-terion only requires that tests are generated from onepoint of the partition. Algorithm 1 therefore only gener-ates test for the first symbolic state that reaches a givenpartition, and uses the set Tested to ignore subsequentpasses over the same partition. This ensures that allthe may, must, and refusal properties are only gener-ated once per partition, and thus reduces the numberof produced test cases. Other strategies such as testingall reached symbolic states, or only testing certain desig-nated locations deemed critical by the user, can easily beimplemented.If a particular point in the symbolic state is of inter-
est, such as an extreme value, this must be computed(step 5a). When a point has been chosen, a trace leadingto it from the initial state is computed (step 5b). Finally,in step 5c, a test case can be generated for each of themust, may, and refusal properties holding in that sym-bolic state, and can finally be output as a test automatonin whatever output format is desired.It should be noted that the above algorithm generates
individual timed Hennessy tests. In general, it is desir-able to compose several of these properties into fewertree structured tests. To facilitate test composition, thetraversal and construction of test cases in step 5 should bedone differently. A composition algorithm is implementedin RTCAT [32]. Furthermore, the graphs in steps 1 and 2can be constructed stepwise on a need basis. This couldresult in a smaller graph and less memory use during itsconstruction because not all equivalence classes may bereachable.Figure 12 shows some examples of generated test cases
from the coffee machine specification in Fig. 5a. RTCAThas been configured to select test points in the interior ofthe equivalence classes.
Xcoin=100coin!
Xcoin=2give!
XthinCof=100Act
Xgive=101thinCof?
Xcoin=100coin!
Xcoin=105give!
Xcof=100Act
Xgive=102cof?
Xcoin=100coin!
Xcoin=4give!
Xgive=1thinCof?
Xcoin=100coin!
Xcoin=4give!
Xgive=102thinCof?
Xgive=102cof?
Fig. 12. Example tests generated from the coffee machine inFig. 5. Filled states are fail states, and unfilled states arepass states. Diamonds contain actions to be refused at
the time indicated at the its top. Act is anacronym for all actions
5 Tool facilities
We have implemented our approach and algorithms ina prototype tool called RTCAT. RTCAT inputs an ERAspecification in AutoGraph format [35]. A specificationmay consist of several ERAs operating in parallel, andcommunicating via shared clocks and integer variables,but no internal synchronization is allowed as stated inSect. 3.2.Other features include:
Termination: by default, the entire equivalence classgraph is constructed. Reachability graph construc-tion terminates when no further equivalence classescan be reached. The result is generation of a com-plete covering test suite.We have also implemented a few pragmatic strate-gies for handling specifications whose reachability orequivalence class graphs are too large to be com-pletely computed, stored, or tested. Construction ofboth graphs can also be terminated by specifyinga maximum trace depth, using bit-state hashing, orboth. Bit-state hashing [24] is a technique that lim-its the number of nodes in a graph, and is believed toresult in a better (under) approximation of the statespace than random exploration, which has a ten-dency of confining itself to small parts of the statespace.
Construction order: both breadth-first and depth-firstconstruction of the equivalence class and reachabilitygraphs are implemented. The tests for a given equiv-alence class are generated the first time it is reachedduring forward reachability analysis. Consequently,the traversal order may affect the number and lengthof tests generated.
Test structure: tests can be constructed either as individ-ual timed Hennessy tests (Algorithm 1) or as testtrees which merge the individual tests when possible.

72 B. Nielsen, A. Skou: Automated test generation from timed automata
Trace generation: timed traces can be generated usingprompt, interior, or patience selection as described inSect. 3.4.
Extreme value selection is currently not supported, butcan easily be implemented. The prototype operates in fourdistinct phases, i.e., the preceeding must be completedbefore a new is started: parsing and initialization, equiv-alence class graph construction, reachability graph con-struction, and, finally, timed trace computation and out-put of the test suite to a file in dot format [26]. RTCAToccupies about 22K lines of C++ code, and is based oncode from a simulator for timed automata (part of an oldversion of the UppAal toolkit [28]). ItsAutoGraph fileformat parser was reused with some minor modificationsto accommodate the ERA syntax. In addition, its DBMimplementation was reused with some added operationsfor zone extrapolation and clock scaling.
6 A case study
6.1 Example 1
The ERA example in Fig. 13a demonstrates that com-puting test cases from a timed automata specificationby hand is non-trivial, even for very small specifica-tions. For example, to compute a test that visits the edge
s1a?,Xa≤1−−−−−→ s0, the edge s0
a?,1<Xa<2−−−−−−−→ s0 must be visitedat least three times in succession for the guard on the bedge to become satisfiable. Furthermore, the b edge mustbe visited before Xa equals 1 time unit; otherwise, the
guard on the succeeding s1a?,Xa≤1−−−−−→ s0 edge is not satis-
fiable. The tool generates the test automaton shown inFig. 13b; its locations are labeled with the visited locationof the specification, and the test verdict (p=pass, f=fail)to be given if the test execution stops in that location.A total of 12 such tests is generated to cover the specifi-cation. It is thus easy to neglect an important scenario iftests are derived manually.
6.2 Example 2: Philips audio protocol
The Philips Audio Protocol is a dedicated protocol forexchanging control information between audio/visualconsumer electronic units. Consequently, the protocol
a?a?a?a?a?a?a?a?a?a?a?a?a?a?a?a?a?Xa<=1Xa<=1Xa<=1Xa<=1Xa<=1Xa<=1Xa<=1Xa<=1Xa<=1Xa<=1Xa<=1Xa<=1Xa<=1Xa<=1Xa<=1Xa<=1Xa<=1
a?a?a?a?a?a?a?a?a?a?a?a?a?a?a?a?a?Xa<2Xa<2Xa<2Xa<2Xa<2Xa<2Xa<2Xa<2Xa<2Xa<2Xa<2Xa<2Xa<2Xa<2Xa<2Xa<2Xa<2Xa>1Xa>1Xa>1Xa>1Xa>1Xa>1Xa>1Xa>1Xa>1Xa>1Xa>1Xa>1Xa>1Xa>1Xa>1Xa>1Xa>1
b!b!b!b!b!b!b!b!b!b!b!b!b!b!b!b!b!Xa<=3Xa<=3Xa<=3Xa<=3Xa<=3Xa<=3Xa<=3Xa<=3Xa<=3Xa<=3Xa<=3Xa<=3Xa<=3Xa<=3Xa<=3Xa<=3Xa<=3Xb>=7Xb>=7Xb>=7Xb>=7Xb>=7Xb>=7Xb>=7Xb>=7Xb>=7Xb>=7Xb>=7Xb>=7Xb>=7Xb>=7Xb>=7Xb>=7Xb>=7
s1s1s1s1s1s1s1s1s1s1s1s1s1s1s1s1s1
s0s0s0s0s0s0s0s0s0s0s0s0s0s0s0s0s0 (s0, f)a!,Xa=1
12−−−−−−→ (s0, f)
a!,Xa=112−−−−−−→
(s0, f)a!,Xa=1
12−−−−−−→ (s0, f)
a!,Xa=112−−−−−−→
(s0, f)b?,Xa=1−−−−−→ (s1, f)
a!,Xb=0−−−−−→ (s0,p)
a b
Fig. 13. Simple ERA example
must be simple and cheap to implement. The data isManchester encoded, and transmitted on a shared busimplemented as a single wire. There are two interestingaspects of this protocol. One is that a certain toler-ance is permitted on the timing of events to compen-sate for drift of hardware clocks and CPU contention.Philips permits a ±5% tolerance on all the timing,while still being able to decode the transmitted sig-nal correctly. The second aspect is that the collisionsof messages on the bus must be detected. The protocolwas first studied by Bosscher et al. in [8]. It was hereproven formally that the signals can be correctly decodedif tolerances are less than 1
17 . The protocol has sincebeen studied numerous times in the context of modelchecking.The goal of generating tests for the protocol is to com-
pute a test suite that can be used to determine if a givenaudio component implements the Manchester encodingand collision detection correctly, and within the allowedtolerances.A station is equipped with a module for encoding and
transmitting data on the bus, and a module for receivingand decoding the data. An overview of the protocol enti-ties is shown in Fig. 14. The sender obtains the bit streamto be transmitted via three actions: in0, in1, and empty,respectively, representing a zero-bit, a one-bit, and anend of message delimiter. The sender Manchester encodesthese bits, and uses the actions up and dn to drive the busvoltage high and low, respectively.The bus works as a logical or, so whenever a station
drives the bus high, the bus will be high even if otherstations previously has set it low. A sender can detect col-lision by checking that the bus is indeed low when it isitself sending a low. The isUp action is used for this pur-pose. If a collision is detected, the upper protocol layer isinformed via the coll action.The receiver informs the upper layer of the decoded
bits via the out1, out0, and end actions. Philips uses ris-ing edge triggering to decode the electrical signal. A risingedge is indicated to the receiver by the VUP action. Todecode the signal using only rising edge triggering as re-quired by Philips, messages must start with a logical one,and be odd in length.Using Manchester encoding, illustrated in Fig. 15, the
time axis is divided into equal sized bit slots. In every bitslot one bit can be sent. A bit slot is further halved intotwo intervals. A logical zero is represented by a low volt-age on the wire during the first interval of a bit slot, a ris-
Sender Receiver
dn
in1 empty coll out0 endout1in0
VUPup isUp Bus
Fig. 14. Overview of the Philips audio protocol

B. Nielsen, A. Skou: Automated test generation from timed automata 73
1 1 10 0 0 0Bit stream
Manchesterencoding
Fig. 15.Manchester encoding of the bit stream 1000110
ing edge at half the bit slot, and high voltage during thelast interval. A logical one is represented by a high dur-ing the first interval, followed by falling edge, and a lowthrough the last half.A bit slot in the Philips protocol is 888µs long. In the
modeling we use quarters of bit slots, denoted q, equal-ing 222µs. The basic constants used in the model, and thederived tolerance levels are summarized in Table 2.The basic operating principle of the sender, shown in
Fig. 16, is that it inputs a new bit while encoding the cur-rent bit, i.e., it has read a bit ahead. The important states
isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?sent==1sent==1sent==1sent==1sent==1sent==1sent==1sent==1sent==1sent==1sent==1sent==1sent==1sent==1sent==1sent==1sent==1
coll!coll!coll!coll!coll!coll!coll!coll!coll!coll!coll!coll!coll!coll!coll!coll!coll!
isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440
isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?Xdn>=6440Xdn>=6440Xdn>=6440Xdn>=6440Xdn>=6440Xdn>=6440Xdn>=6440Xdn>=6440Xdn>=6440Xdn>=6440Xdn>=6440Xdn>=6440Xdn>=6440Xdn>=6440Xdn>=6440Xdn>=6440Xdn>=6440Xdn<=6880Xdn<=6880Xdn<=6880Xdn<=6880Xdn<=6880Xdn<=6880Xdn<=6880Xdn<=6880Xdn<=6880Xdn<=6880Xdn<=6880Xdn<=6880Xdn<=6880Xdn<=6880Xdn<=6880Xdn<=6880Xdn<=6880
isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440 empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?
Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662
empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324
up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!
dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1
dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1sent:=1
empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324
empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?empty?Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662
in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324
in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662
dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662
up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!
in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup>=8436Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324Xup<=9324
in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662
up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!
in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662
in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn>=8436Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324
dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!
in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?in0?Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662
up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn>=4218Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662
dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!dn!
in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup>=4218Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662Xup<=4662up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!up!
in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?in1?Xdn>=80000Xdn>=80000Xdn>=80000Xdn>=80000Xdn>=80000Xdn>=80000Xdn>=80000Xdn>=80000Xdn>=80000Xdn>=80000Xdn>=80000Xdn>=80000Xdn>=80000Xdn>=80000Xdn>=80000Xdn>=80000Xdn>=80000sent:=0sent:=0sent:=0sent:=0sent:=0sent:=0sent:=0sent:=0sent:=0sent:=0sent:=0sent:=0sent:=0sent:=0sent:=0sent:=0sent:=0
isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn>=2000Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440Xdn<=2440
isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?Xdn>=8236Xdn>=8236Xdn>=8236Xdn>=8236Xdn>=8236Xdn>=8236Xdn>=8236Xdn>=8236Xdn>=8236Xdn>=8236Xdn>=8236Xdn>=8236Xdn>=8236Xdn>=8236Xdn>=8236Xdn>=8236Xdn>=8236Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324Xdn<=9324
isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662
isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?isUp?Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn>=4018Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662Xdn<=4662
s12s12s12s12s12s12s12s12s12s12s12s12s12s12s12s12s12
s9s9s9s9s9s9s9s9s9s9s9s9s9s9s9s9s9
s10s10s10s10s10s10s10s10s10s10s10s10s10s10s10s10s10
s11s11s11s11s11s11s11s11s11s11s11s11s11s11s11s11s11
s6s6s6s6s6s6s6s6s6s6s6s6s6s6s6s6s6
s1s1s1s1s1s1s1s1s1s1s1s1s1s1s1s1s1s0s0s0s0s0s0s0s0s0s0s0s0s0s0s0s0s0
s7s7s7s7s7s7s7s7s7s7s7s7s7s7s7s7s7
s0to0s0to0s0to0s0to0s0to0s0to0s0to0s0to0s0to0s0to0s0to0s0to0s0to0s0to0s0to0s0to0s0to0
s0to1s0to1s0to1s0to1s0to1s0to1s0to1s0to1s0to1s0to1s0to1s0to1s0to1s0to1s0to1s0to1s0to1s5s5s5s5s5s5s5s5s5s5s5s5s5s5s5s5s5
s8s8s8s8s8s8s8s8s8s8s8s8s8s8s8s8s8s1to0s1to0s1to0s1to0s1to0s1to0s1to0s1to0s1to0s1to0s1to0s1to0s1to0s1to0s1to0s1to0s1to0
s4s4s4s4s4s4s4s4s4s4s4s4s4s4s4s4s4s1to1s1to1s1to1s1to1s1to1s1to1s1to1s1to1s1to1s1to1s1to1s1to1s1to1s1to1s1to1s1to1s1to1s3s3s3s3s3s3s3s3s3s3s3s3s3s3s3s3s3
configconfigconfigconfigconfigconfigconfigconfigconfigconfigconfigconfigconfigconfigconfigconfigconfigsystem sender;system sender;system sender;system sender;system sender;system sender;system sender;system sender;system sender;system sender;system sender;system sender;system sender;system sender;system sender;system sender;system sender;int sent;int sent;int sent;int sent;int sent;int sent;int sent;int sent;int sent;int sent;int sent;int sent;int sent;int sent;int sent;int sent;int sent;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;observable in1, in0, up, dn, empty, isUp, coll;
sendersendersendersendersendersendersendersendersendersendersendersendersendersendersendersendersender
Fig. 16. The sender ERA with collision detection
Table 2. Constants used in the ERA specification of the Philipsaudio protocol
Symbol Value Meaning
q 2220 one quarter of a bit slot (220 µs)d 200 Detection ‘just’ before up (20 µs)g 220 ‘Around’ 25% and 75% of the bit-slot (22 µs)w 80000 Station Silence (8 ms)t 0.05 Tolerance (5%)
A1min 2000 q-g A1max 2440 q+gA2min 6440 3q-g A2max 6880 3q+gQ2 4440 2q Q2minD 4018 2q(1-t)-dQ2min 4218 2q(1-t) Q2max 4662 2q(1+t)Q3min 6327 3q(1-t) Q3max 6993 3q(1+t)Q4 8880 4q Q4minD 8236 4q(1-t)-dQ4min 8436 4q(1-t) Q4max 9324 4q(t+t)Q5min 10545 5q(1-t) Q5max 11655 5q(1+t)Q7min 14763 7q(1-t) Q7max 16317 7q(1+t)Q9min 18981 9q(1-t) Q9max 20979 9q(1+t)

74 B. Nielsen, A. Skou: Automated test generation from timed automata
are labeled SXtoY, where X represents the bit currentlybeing generated, and Y the bit to be generated next. Ob-serve that whenever X and Y differ, the sender waitstwice the normal duration before changing the status ofthe wire.To detect collisions the bus must according to Phillips
be sampled ‘around’ three specific time points, namelyafter a quarter of a bit slot after starting a low signal,again after three quarters (if still transmitting a low as inthe one-to-zero transition), and ‘just’ before setting thebus high.The receiver, shown in Fig. 17, decodes the signal
based on occurrences of rising edges. The importantstates are LO and L1. The receiver is in LO when the lastreceived bit was a zero, and in L1 when the last bit was
s5s5s5s5s5s5s5s5s5s5s5s5s5s5s5s5s5
s4s4s4s4s4s4s4s4s4s4s4s4s4s4s4s4s4
s3s3s3s3s3s3s3s3s3s3s3s3s3s3s3s3s3
L0L0L0L0L0L0L0L0L0L0L0L0L0L0L0L0L0
s2s2s2s2s2s2s2s2s2s2s2s2s2s2s2s2s2
end!end!end!end!end!end!end!end!end!end!end!end!end!end!end!end!end!
end!end!end!end!end!end!end!end!end!end!end!end!end!end!end!end!end!odd==1odd==1odd==1odd==1odd==1odd==1odd==1odd==1odd==1odd==1odd==1odd==1odd==1odd==1odd==1odd==1odd==1XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979
out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!odd==0odd==0odd==0odd==0odd==0odd==0odd==0odd==0odd==0odd==0odd==0odd==0odd==0odd==0odd==0odd==0odd==0XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP>=18981XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979XVUP<=20979
out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317
VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP>=14736XVUP<=18981XVUP<=18981XVUP<=18981XVUP<=18981XVUP<=18981XVUP<=18981XVUP<=18981XVUP<=18981XVUP<=18981XVUP<=18981XVUP<=18981XVUP<=18981XVUP<=18981XVUP<=18981XVUP<=18981XVUP<=18981XVUP<=18981
VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317
VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP>=10545XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317XVUP<=16317
VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655
VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP>=6327XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655XVUP<=11655
out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!
out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!
out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!out0!odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1
out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!out1!odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1odd:=-odd+1
VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?VUP?odd:=0odd:=0odd:=0odd:=0odd:=0odd:=0odd:=0odd:=0odd:=0odd:=0odd:=0odd:=0odd:=0odd:=0odd:=0odd:=0odd:=0
L1L1L1L1L1L1L1L1L1L1L1L1L1L1L1L1L1
s1s1s1s1s1s1s1s1s1s1s1s1s1s1s1s1s1idleidleidleidleidleidleidleidleidleidleidleidleidleidleidleidleidle
system receiver;system receiver;system receiver;system receiver;system receiver;system receiver;system receiver;system receiver;system receiver;system receiver;system receiver;system receiver;system receiver;system receiver;system receiver;system receiver;system receiver;int odd;int odd;int odd;int odd;int odd;int odd;int odd;int odd;int odd;int odd;int odd;int odd;int odd;int odd;int odd;int odd;int odd;observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end; observable VUP, out1, out0, end;
receiverreceiverreceiverreceiverreceiverreceiverreceiverreceiverreceiverreceiverreceiverreceiverreceiverreceiverreceiverreceiverreceiver
configconfigconfigconfigconfigconfigconfigconfigconfigconfigconfigconfigconfigconfigconfigconfigconfig
Fig. 17. The receiver ERA
Test Case 1.
(s0, f)in1!,Xup=80000−−−−−−−−−−→ (s1, f)
up?,Xin1=0−−−−−−−→ (s3, f)in0!,Xup=4218−−−−−−−−−→ (s1to0, f)
dn?,Xin0=0−−−−−−−→ (s5, f)in0!,Xdn=8436−−−−−−−−−→
(s0to0, f)up?,Xin0=0−−−−−−−→ (s6, f)
dn?,Xup=4218−−−−−−−−−→ (s7, f)
in1!,Xdn=4218−−−−−−−−−→ (s0to1, f)up?,Xin1=0−−−−−−−→ (s8, f)
in1!,Xup=8436−−−−−−−−−→
(s1to1, f)dn?,Xin1=0−−−−−−−→ (s4,p)
Act,Xdn=0−−−−−−−→ (sx, f)Test Case 2.
(s0, f)in1!,Xup=80000−−−−−−−−−−→ (s1, f)
up?,Xin1=0−−−−−−−→ (s3, f)empty!,Xup=4218−−−−−−−−−−−→ (s1, f)
dn?,Xempty=0−−−−−−−−−→ (s0, f)
isUp!,Xdn=0−−−−−−−−→
(s12, f)coll?,XisUp=0−−−−−−−−−→ (s0, f)
isUp!,Xcoll=80000−−−−−−−−−−−→ (s12,p)
Fig. 18. Examples of tests generated for the Philips audio protocol sender
a one. According to [6] the model is a direct transla-tion of the decoding algorithm described in the Philipsdocumentation.The generated tests are exemplified in Fig. 18. Test
case 1 produces the bit string ‘1001’, and checks whetherthe implementation can produce this sequence, andwhether it like the specification refuses all actions at thestate and time entered thereafter (s4). If one of the offeredactions are accepted, the test execution will terminate ina state sx with fail verdict. Test case 2 checks whethercollision detection is performed after, in this case, trans-mission of the single bit message ‘1’.The case study illustrates that test cases can be gener-
ated from a real-life case, but it has also revealed a pointwhere our current approach can be improved. For ex-

B. Nielsen, A. Skou: Automated test generation from timed automata 75
ample, in our modeling of collision detection, the senderis required to be able to synchronize with the isUp ac-tion at all instances in the ±g interval. This is probablynot what the Philips engineers have in mind. Rather,they intend to sample the bus at some point in thisinterval. However, this form of timing uncertainty can-not be readily modeled in the current ERA language. Itis possible to change the specification (by using a non-deterministic choice) such that the proper verdict (incon-clusive) is assigned to the tests, but executing them willmost likely result in large number of inconclusive verdicts,because the action could not be observed at the chosentime.In addition, it should be noted that the timing toler-
ances are modeled by permitting the upper protocol layerto deliver the next bit to be transmitted at some pointin the “window of opportunity”. The sender is thereforerequired to accept bits at any time within the toleranceinterval. If the interface of the actual Philips components(such a detailed description was not available to us) isdifferent from this, the test cases will not be directly exe-cutable as is. An important lesson learned is that the spe-cification model used for test generation must accuratelyreflect the behavior at the interface of the component tobe tested.We conclude that our technique is applicable “as is”
for strictly timed embedded controllers that are deter-ministic with respect to time, but that it will be import-ant to add support for timing uncertainty.
7 Tool performance
To analyze the feasibility of our techniques with respectto time and space usage, and also test suite size, we ap-plied RTCAT on a created ERA version of the frequentlystudied Philips audio protocol [6, 8] and a simple tokenpassing protocol. As part of the experiment we measuredthe number and length of the generated tests, the num-ber of reached (convex) equivalence classes and symbolicstates, and the space and time needed to generate thetests and output them to a file.The platform used in the experiment consists of a Sun
Ultra-250 workstation running Solaris 5.7. The machineis equiped with 1GB RAM and 2×400MHz CPUs. Noextra compiler optimizations were made. The results aretabulated in Table 3.The size of the produced test suites is in all combi-
nations quite manageable, and constitute test suites thatcan easily be executed in practice. There is thus a largemargin allowing for more test points per equivalence classin the form of several extreme values, generating longertests by iterating loops in the specification and reach-ability graph, or by performing experiments for everyreached symbolic state as opposed to the selection cri-terion of equivalence classes only. Moreover, coverage ofeven larger specifications can also be obtained.
Table 3. Experimental results from generating tests from the cof-fee machine (CofM), the Philips audio protocol receiver component(Ph-R), sender component with collision detection (Ph-S), and7-node token passing protocol (Tok7). I=individually generatedtests (Algorithm 1), C=composed tests
CofM Ph-R Ph-S Tok7
Equivalence Classes 14 60 47 42
Breadth-First
Symbolic States 17 71 97 15427Time (s) 1 1 2 541Memory (MB) 5 5 5 40
C-Number of Tests 16 97 68 71C-Total Length 45 527 393 574
I-Number of Tests 22 118 85 84I-Total Length 58 614 467 665
Depth-First
Symbolic States 17 85 98 7283Time (s) 1 2 2 158Memory (MB) 5 5 5 24
C-Number of Tests 16 86 67 60C-Total Length 45 1619 487 5290
I-Number of Tests 22 118 85 84I-Total Length 58 2103 587 6321
The construction order may influence the number andlength of tests because the reached symbolic states are in-cluded in the set Tested during construction of the reach-ability graph. Our results show that depth-first construc-tion generates slightly fewer tests than breadth-first, butalso considerably longer test suites. This suggests thatbreadth-first should be used when the most economic cov-ering test suite is desired, and that depth-first should beused when a covering test suite is desired that also checkslonger sequences of interactions. Our observation is con-sistent with most model checking tools which produceshorter counter examples when breadth-first traversal isused, but also observe that breadth-first traversal gener-ally consumes more memory during the construction ofthe state space.The tabulated figures on the space and time consump-
tion is the maximum observed; generally, test composi-tion takes slightly longer and uses a little extra spacedue to the extra computations and traversals. For thefirst three specifications, the space and time consump-tion is quite low, and indicates that fairly large specifica-tions can be handled. However, we have also encountereda problem with our current implementation which occursfor some specifications (such as the token passing proto-col), where our application of the symbolic reachabilitytechniques becomes a bottleneck. When the specificationuses a large set of active clocks (one per node to measurethe token holding time for that node plus one auxiliaryin the example), we experience that a large number of

76 B. Nielsen, A. Skou: Automated test generation from timed automata
symbolic states is constructed in order to terminate theforward reachability analysis. Consequently, an extremeamount of memory is used to guarantee complete cover-age. It is important to note that the size of the producedtest suite is still quite reasonable. The increased complex-ity due to clocks that is inherent in the applied symbolictechniques is also experienced in the context of modelchecking, and here more sophisticated clock reduction al-gorithms have been applied [20]. These techniques canalso be applied to test generation. Running RTCAT onan equivalent one-clock version (only one node may holdthe token at a time, and thus one clock suffices) of Tok7
consumes much less memory (about 5MB).In addition, the (non-inherent) way the techniques
are implemented in the prototype can be improved. Herereachability analysis is performed on the state space thathas been partitioned into first equivalence classes, andthen, further into convex sets. Although it simplified im-plementation of the prototype it results in more andsmaller symbolic states than is really necessary from theperspective of reachability analysis. It would thereforebe better to apply the reachability analysis on the ori-ginal specification automaton rather than the partitionedstate space, because this should result in larger and fewersymbolic states, with the effect of using less memory. Inaddition, a new symbolic technique called Clock Differ-ence Diagrams [3] has been developed that more effec-tively represents non-convex sets of states than zones do.In conclusion, there are several options for reducing theobserved problem.
8 Conclusions and future work
This paper has presented a new technique for generat-ing real-time tests from a restricted, but determinizableclass of timed automata. The underlying testing theoryis Hennessy’s tests lifted to include timed traces. Themain problem is to generate a sufficiently small test suitethat can be executed in practice while maintaining a highlikelihood of detecting unknown errors and obtaining thedesired level of coverage. In our technique, the generatedtests are selected on the basis of a coarse equivalenceclass partitioning of the state space of the specification.We employ the efficient symbolic techniques developedfor model checking to synthesize the timed tests, andto guarantee coverage with respect to a coverage crite-rion which is inspired by classical domain testing criteria.The techniques are implemented in a prototype tool, andthe application thereof to a realistic specification showspromising results. The test suite is quite small, and isconstructed quickly, and with a reasonable memory us-age. Our experience, however, also indicates a problemwith our application of the symbolic reachability analy-sis, which should be addressed in future implementationwork. Compared to previous work based on the regiongraph technique, our approach appear advantageous.
Much additional work remains to be done. In par-ticular we are examining the possibilities for extendingthe expressiveness of our specification language. It willbe important to allow specification and effective test oftiming uncertainty, i.e., that an event must be producedor accepted at some (unspecified) point in an interval.Further, it should be possible to specify environment as-sumptions and to take these into account during testgeneration. Determinizability is not in general a formalnecessity to generate real-time test cases, because test-ing execution in practice only allows checking of finitebehavior, but one of algorithmic convenience. However,further work is necessary to investigate what problemsand efficiency can be expected if our techniques are gener-alized towards a more general timed automaton language.It would also be academically interesting to develop a for-mal fault model for our selection criteria, that preciselycharacterizes the hypothesis required to conclude abso-lute correctness according to the implementation pre-order. Finally, our techniques should be examined withreal applications, and the generated test should be exe-cuted against real implementations.
References
1. Alur R, Dill DL: A theory of timed automata. Theoret Com-put Sci 126(2):183–235, 1994
2. Alur R, Fix L, Henzinger TA: Event-clock automata: a de-terminizable class of timed automata. In: 6th Conference onComputer Aided Verification, Lecture Notes in ComputerScience, vol. 818. Springer, Berlin Heidelberg New York,1994
3. Behrmann G, Larsen KG, Pearson J, Weise C, Yi W: Efficienttimed reachability analysis using clock difference diagrams.In: Computer Aided Verification (CAV’99), Lecture Notes inComputer Science, vol. 1633. Springer, Berlin Heidelberg NewYork, 1999, pp. 22–24
4. Beizer B: Software testing techniques. International Thomp-son Computer, New York, 1990
5. Bellman R: Dynamic programming. Princeton UniversityPress, Princeton, New Jersey, 1957
6. Bengtsson J, David Griffioen WO, Kristoffersen KJ, LarsenKG, Larsson F, Petterson P, Yi W: Verification of an au-dio protocol with bus collision using UppAal. In: 9th Int.Conference on Computer Aided Verification, Lecture Notes inComputer Science, vol. 1102. Springer, Berlin Heidelberg NewYork, 1996, pp. 244–256
7. Steffen B, Cleaveland R (eds.): Int J Software Tools TechnolTransfer 1(1+2), 1997
8. Bosscher D, Polak I, Vaandrager F: Verification of an audioprotocol. TR CS-R9445, CWI, Amsterdam, The Netherlands,1994; Lecture Notes in Computer Science, vol. 863. Springer,Berlin Heidelberg New York, 1994
9. Bouajjani A, Tripakis S, Yovine S: On-the-fly symbolic model-checking for real-time systems. In: 1997 IEEE Real-Time Sys-tems Symposium, RTSS’97, San Fransisco, Calif., USA. IEEEComputer, New York, 1996
10. Bozga M, Fernandez JC, Ghirvu L, Jard C, Jeron T, KerbratA, Morel P, Mounier L: Verification and test generation for theSSCOP protocol. Sci Comput Program 36(1):27–52, 2000
11. Bozga M, Fernandez JC, Kerbrat A, Mounier L: Protocol ver-ification with the ALDEBARAN toolset. Int J Software ToolsTechnol Transfer 1(1+2):166–184, 1997
12. Braberman V, Felder M, Marre M: Testing timing behaviorsof real time software. In: Quality Week 1997. San Francisco,Calif., USA, 1997, pp. 143–155

B. Nielsen, A. Skou: Automated test generation from timed automata 77
13. Brinksma E: A theory for the derivation of tests. In: ProtocolSpecification Testing and Verification VIII (PSTV’88), 1988,pp. 63–74
14. Cardell-Oliver R: Conformance testing of real-time systemswith timed automata. Formal Aspects Comput 12(5):350–371,2000
15. Cardell-Oliver R, Glover T: A practical and complete algo-rithm for testing real-time systems. In: 5th international Sym-posium on Formal Techniques in Real Time and Fault Toler-ant Systems (FTRTFT’98), September 14–18, Lecture Notesin Computer Science, vol. 1486. Springer, Berlin HeidelbergNew York, 1998, pp. 251–261
16. Castanet R, Kone O, Laurencot P: On-the-fly test generationfor real-time protocols. In: International Conference in Com-puter Communications and Networks, Lafayette, La., USA,October 12–15. IEEE Computer, New York, 1998
17. Clarke D, Lee I: Testing real-time constraints in a process al-gebraic setting. In: 17th International Conference on SoftwareEngineering, 1995
18. Clarke D, Lee I: Automatic test generation for the analysis ofa real-time system: case study. In: 3rd IEEE Real-Time Tech-nology and Applications Symposium, 1997
19. Cleaveland R, Hennessy M: Testing equivalence as a bisimula-tion equivalence. Formal Aspects Comput 5:1–20, 1993
20. Daws C, Yovine S: Reducing the number of clock variables oftimed automata. In: 1996 IEEE Real-Time Systems Sympo-sium, RTSS’96, Washington, DC, USA. IEEE Computer, NewYork, 1996
21. de Vries RG, Tretmans J: On-the-fly conformance testingusing SPIN. Int Jn Software Tools Technol Transfer 2(4):382–393, 2000
22. Dill DL: Timing assumptions and verification of finite-state concurrent systems. In: International Workshop onAutomatic Verification Methods for Finite State Systems,Grenoble, France, June. Lecture Notes in Computer Sci-ence, vol. 407. Springer, Berlin Heidelberg New York, 1989,pp. 197–212
23. En-Nouaary A, Dssouli R, Khendek F: Timed test casesgeneration based on state characterization technique. In:19th IEEE Real-Time Systems Symposium (RTSS’98), 1998,pp. 220–229
24. Holzmann JG: Design and validation of computer protocols.Prentice-Hall, N.J., USA, 1991
25. Kerbrat A, Jeron T, Groz R: Automated test generation fromSDL specifications. In: 9th SDL Forum, 21–25 June. Montreal,Quebec, Canada, 1999
26. Koustsofios E, North SC: Drawing graphs with dot. TechnicalReport http://www.research.att.com/sw/tools/graphviz/dotguide.ps.gz, AT&T Bell Laboratories, Murray Hill, N.J.,USA, 1999
27. Larsen KG, Larsson F, Petterson P, Yi W: Efficient veri-fication of real-time systems: compact data structures andstate-space reduction. In: 18th IEEE Real-Time Systems Sym-posium, 1997, pp. 14–24
28. Larsen KG, Pettersson P, Yi W: UppAal in a nutshell. Int JSoftware Tools Technol Transfer 1(1):134–152, 1997
29. Leblanc P: OMT and SDL based techniques and tools for de-sign, simulation and test production of distributed systems.Int J Software Tools Technol Transfer 1(1+2):153–165, 1997
30. Mandrioli D, Morasca S, Morzenti A: Generating test cases forreal-time systems from logic specifications. ACM Trans Com-put Syst 13(4):365–398, 1995
31. De Nicola R, Hennessy MCB: Testing equivalences for pro-cesses. Theoret Comput Sci 34:83–133, 1984
32. Nielsen B: Specification and test of real-time systems. PhDthesis, Department of Computer Science, Aalborg University,Denmark, 2000
33. Peleska J, Buth B: Formal methods for the international spacestation ISS. In: Olderog ER, Steffen B (eds) Correct Sys-tem Design. Lecture Notes in Computer Science, vol. 1710.Springer, Berlin Heidelberg New York, 1999, pp. 363–389
34. Peleska J, Zahlten C: Test automation for avionic systems andspace technology. In: GI Working Group on Test, Analysis andVerification of Software. Munich (extended abstract), 1999
35. Ressouche A, de Simone R, Bouali A, Roy V. The fcToolsuser manual. Technical Report ftp://ftp-sop.inria.fr/meije/verif/fc2.userman.ps, INRIA Sophia Antipolis
36. Rushby J: Formal methods: instruments of justification ortools of discovery. In: Nordic Seminar on Dependable Comput-ing Systems (NSDCS’94), Lyngby, Denmark, 1994
37. Schlingloff H, Meyer O, Hulsing T: Correctness analysis ofan embedded controller. In: Data Systems in Aerospace (DA-SIA99). ESA SP-447, Lisbon, Portugal, 1999, pp. 317–325
38. Schmitt M, Koch B, Grabowski J, Hogrefe D: Autolink –Putting formal test methods into practice. In: 11th Int. Work-shop on Testing of Communicating Systems (IWTCS’98),Tomsk, Russia, 1998
39. Springintveld J, Vaandrager F, D’Argenio PR: Testing timedautomata. TR CTIT 97-17, University of Twente. TheoretComput Sci 254(1–2):225–257, 2001
40. Diekert V, Gastin P, Petit A: Removing epsilon-transitionsin timed automata. In: 14th Annual Symposium on Theor-etical Aspects of Computer Science, STACS 1997, Lubeck,Germany, February 27 – March 1 1997. Lecture Notes inComputer Science, vol. 1200. Springer, Berlin Heidelberg NewYork, 1997, pp. 583–594
41. Yi W, Pettersson P, Daniels M: Automatic verification of real-time communicating systems by constraint solving. In: 7th Int.Conf. on Formal Description Techniques. North-Holland, Am-sterdam, The Netherlands, 1994, pp. 223–238