an application of subagging for the improvement of prediction accuracy of multivariate calibration...
TRANSCRIPT
vier.com/locate/chemolab
Chemometrics and Intelligent Laborat
An application of subagging for the improvement of prediction accuracy
of multivariate calibration models
Roberto Kawakami Harrop Galvao a, Mario Cesar Ugulino Araujo b,*,
Marcelo do Nascimento Martins a, Gledson Emidio Jose b, Marcio Jose Coelho Pontes b,
Edvan Cirino Silva b, Teresa Cristina Bezerra Saldanha b
a Instituto Tecnologico de Aeronautica, Divisao de Engenharia Eletronica, 12228-900, Sao Jose dos Campos, SP, Brazilb Universidade Federal da Paraıba, CCEN, Departamento de Quımica, Caixa Postal 5093, CEP 58051-970-Joao Pessoa, PB, Brazil
Received 18 February 2005; received in revised form 2 September 2005; accepted 19 September 2005
Available online 21 October 2005
Abstract
The term bagging refers to a class of techniques in which an ensemble model is obtained by combining different member models generated by
resampling the available data set. It has been shown that bagging can lead to substantial gains in accuracy for both classification and regression
models, specially when alterations in the training set cause significant changes in the outcome of the modelling procedure. However, in the context
of chemometrics, the use of bagging for quantitative multicomponent analysis is still incipient. More recently, an alternative aggregation scheme
termed subagging, which is based on subsampling without replacement, has been shown to provide performance improvements similar to bagging
at a smaller computational cost. The present paper proposes a strategy for using subagging in conjunction with three multivariate calibration
methods, namely Partial Least Squares (PLS) and Multiple Linear Regression with variable selection by using either the Successive Projections
Algorithm (MLR-SPA) or a Genetic Algorithm (MLR-GA). The subagging member models are generated by subsampling the pool of samples
available for modelling and then forming new calibration sets. Such a strategy is of value in analytical problems involving complex matrices, in
which reproducing the composition variability of real samples by means of optimized experimental designs may be a difficult task. The efficiency
of the proposed strategy is illustrated in a problem involving the NIR spectrometric determination of four diesel quality parameters (specific mass,
sulphur content, and the distillation temperatures T10% and T90% at which 10% and 90% of the sample has evaporated, respectively). In this case
study, the use of 30 subsampling iterations provides relative improvements of up to 16%, 33%, and 35% in the prediction accuracy of PLS, MLR-
SPA, and MLR-GA models, respectively, with respect to the expected results of individual (non-ensemble) models.
D 2005 Elsevier B.V. All rights reserved.
Keywords: Bagging; Subagging; MLR; PLS; SPA; Genetic algorithms; NIR spectrometry; Diesel analysis
1. Introduction
In regression and classification tasks where the size of the
data set is small, resampling techniques [1] are often used to
obtain better estimates of prediction accuracy, as well as to
assess the sensitivity of the modelling method with respect to
the composition of the training set [2]. A popular method,
which has long been used for this purpose is the jackknife
[3], or ‘‘leave-one-out’’ procedure, in which different models
are constructed by removing and then re-inserting one object
at a time from the training set. At the end, the variability of
0169-7439/$ - see front matter D 2005 Elsevier B.V. All rights reserved.
doi:10.1016/j.chemolab.2005.09.005
* Corresponding author. Tel.: +55 8 3216 7438; fax: +55 8 3216 7437.
E-mail address: [email protected] (M.C.U. Araujo).
the model properties (such as regression or discriminant
coefficients, for instance) may be determined. Moreover, each
object can be used for validation once, in order to obtain a
cross-validation measure of prediction performance. The
cross-validation error may be used, for instance, to select
the best single model from a class of models, as in the case of
choosing the number of latent variables in Principal Compo-
nent Regression (PCR) and Partial-Least-Squares (PLS), or
the best subset of variables in Multiple Linear Regression
(MLR). In a related technique, known as bootstrap [4,5],
different calibration sets are formed by randomly selecting a
fixed number of objects from the available data set, with
replacement. In this manner, different models can be obtained,
as in the jackknife procedure.
ory Systems 81 (2006) 60 – 67
www.else

R.K.H. Galvao et al. / Chemometrics and Intelligent Laboratory Systems 81 (2006) 60–67 61
A less common use for such methods consists of
combining the different models obtained in the course of
resampling in order to generate a single ‘‘ensemble’’ model
[6]. For instance, the combination can be carried out by
averaging the coefficients of the models if linear structures
are employed [7]. In a more general setting, the outputs of
classifiers can be combined by majority voting [8,9] whereas
the outputs of quantitative models can be averaged [10]. As
a result, the ensemble model is often more accurate than any
of its individual members [6,8]. Such a concept was studied
in detail by Breiman [11,12], who coined the term
‘‘bagging’’ (bootstrap aggregating) for the process of
generating different modelling sets by a bootstrap procedure
and then combining the resulting models. In those seminal
papers, Breiman showed that bagging can lead to substantial
gains in accuracy for both classification and regression,
specially when alterations in the training set cause signif-
icant changes in the outcome of the modelling procedure.
More specifically, in regression tasks, where the mean-
square error of prediction is the sum of noise variance,
predictor bias, and predictor variance, bagging can be used
to reduce the predictor variance [11]. However, a modified
version of the basic bagging algorithm (‘‘iterated bagging’’)
can also lead to reductions in the predictor bias [13].
It is worth noting that bagging techniques have become
more popular for classification tasks, whereas their use in
multivariate regression problems has received comparatively
little attention. In this context, most research efforts have been
focused on neural network applications [10,14]. In such cases,
bagging can be used to reduce the statistical instability of
neural network training, whose generalization performance
may be significantly altered by small changes in the training set
and/or training parameters [15]. However, the utility of bagging
in the problem of variable selection for MLR was already
pointed out by Breiman [11,12]. In this case, changes in the
selection outcome caused by modifications in the calibration
set are smoothed by averaging the resulting models. Moreover,
bagging techniques may also be of value in the context of
Partial-Least-Squares (PLS) modelling, as described in a study
[16] concerning the determination of solid content in latex
samples by near-infrared reflectance spectrometry. In such an
application, the aggregation of 30 PLS models generated by the
bootstrap procedure led to a decrease of 7% in the mean sum of
squared errors (MSEE) with respect to the standard PLS
method. Such an MSEE statistic was obtained by applying the
models to the prediction of an independent, previously unseen
data set.
More recently, an alternative aggregation scheme based
on subsampling without replacement was also proposed [17].
In such a scheme, which was termed ‘‘subagging’’ (subsam-
ple aggregating), each individual model is constructed on
the basis of a reduced number of Mc objects extracted from
the pool of M objects available for modelling (Mc<M). The
individual models thus generated are then combined to
create an ensemble model, as in bagging. It is worth noting
that the bootstrap procedure employed in standard bagging
generates data sets with the same size M of the original
modelling set. Buhlmann and Yu argue that subagging may
have substantial computational advantages with respect to
bagging because the calibration of each individual model is
faster if fewer training objects are employed. Interestingly,
such an improved computational efficiency comes at the
cost of only a small loss in performance for the ensemble
model, as demonstrated by numerical examples [17].
In the present paper, a subagging strategy is proposed to
improve the accuracy of multivariate calibration models in
spectrometric analysis. More specifically, the resampling
factor used to generate the subagging member models
consists of extracting calibration objects from the overall
data set available for modelling purposes. It is worth noting
that this application of subagging may be of value when the
complexity of the matrix makes it difficult to reproduce the
composition variability of real samples by means of
optimized experimental designs [18]. In this case, a
representative calibration set must be extracted from a pool
of real samples [19]. The remaining samples may be used
for validation in order to guide modelling decisions such as
the choice of an appropriate subset of informative variables
in MLR [20–22].
In this context, random sampling (RS) is often employed
because of its simplicity and also because a group of data
randomly extracted from a larger set follows the statistical
distribution of the entire set. However, RS does not guarantee
the representativity of the set, nor does it prevent extrapolation
problems [23]. In fact, RS does not ensure, for instance, that
the samples on the boundaries of the set are included in the
calibration. In this sense, it may be interesting to investigate the
use of subagging in conjunction with RS in the construction of
the calibration set.
The proposed subagging strategy is employed with three
regression techniques: (a) PLS, (b) MLR with variable
selection by the Successive Projections Algorithm (MLR-
SPA) [20–22], and (c) MLR with variable selection by a
Genetic Algorithm (MLR-GA) [24,25]. For illustration, a
multivariate calibration problem involving NIR spectrometric
analysis of diesel samples is considered. Four quality
parameters are determined (specific mass, sulphur content,
and the distillation temperatures T10% and T90% at which
10% and 90% of the sample has evaporated, respectively
[26]).
2. Proposed subagging strategy
The use of subagging requires a procedure for obtaining
a model from each resampled data set and a method for
combining the resulting models. This section describes the
implementation of these procedures, as well as the definition
of a performance index for the subagging result.
The overall data set available for model-building purposes
will be termed ‘‘modelling set’’. The Mc samples extracted by
subsampling the modelling set will form the ‘‘calibration set’’.
It is worth noting that the subsampling is carried out without
replacement, as previously discussed. The Mv samples remain-
ing in the modelling set after extraction of the calibration set
R.K.H. Galvao et al. / Chemometrics and Intelligent Laboratory Systems 81 (2006) 60–6762
will form the ‘‘validation set’’. As described below, the
validation set will be employed to guide the variable selection
process in MLR-SPA and MLR-GA.
2.1. Resampling and calibration
2.1.1. PLS
In the PLS calibration, an appropriate number of latent
variables (r) is initially determined on the basis of the cross-
validation (‘‘leave-one-out’’) error obtained by using the entire
modelling set. The criterion of Haaland and Thomas is applied
to find the optimum point in the curve of prediction error sum
of squares (PRESS) vs. r [27,28]. Such a criterion consists of
employing an F-test to determine the smallest value of r for
which PRESS(r) is not significantly larger than the global
PRESS minimum. An F-ratio probability of 0.75 is adopted, as
suggested elsewhere [29].
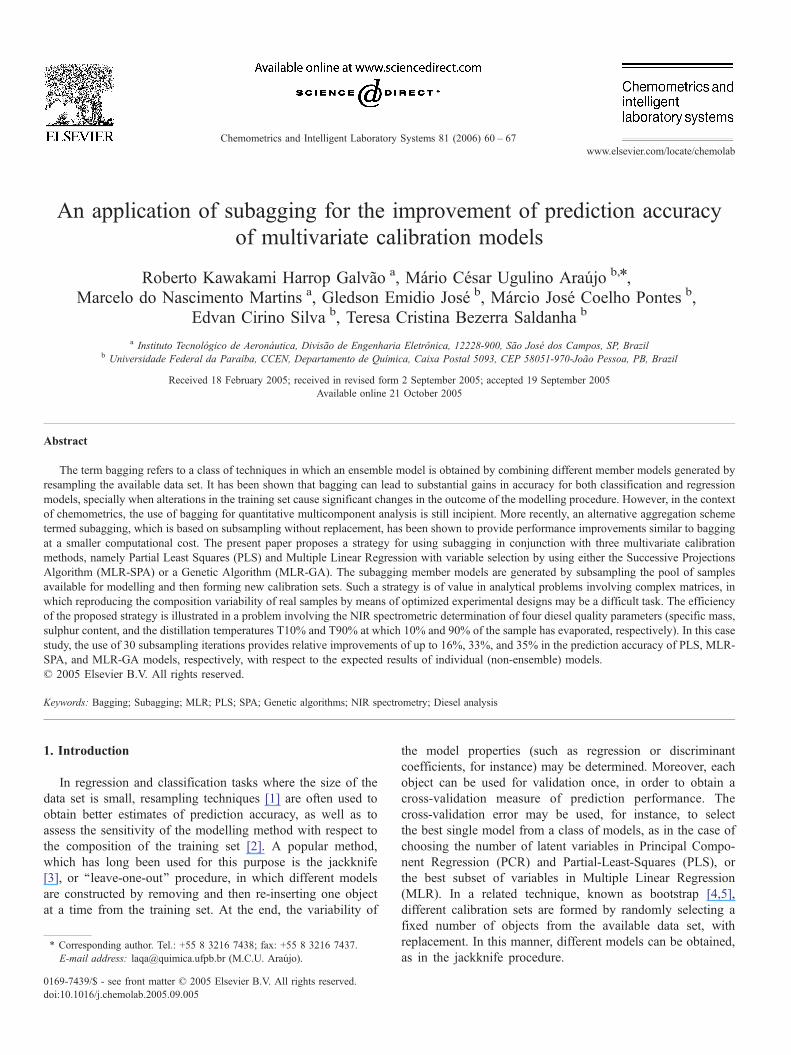
The subagging procedure for PLS is illustrated in Fig. 1a.
As can be seen, a PLS model is obtained from each calibration
set obtained by subsampling the modelling set. The regressions
Fig. 1. Subagging procedure for (a) PLS and (b) MLR-SPA or MLR-GA modelling
previously determined by cross-validation using the entire modelling data set. Th
prediction error in the validation set.
are carried out by using the number of latent variables initially
established by cross-validation.
2.1.2. MLR-SPA
In MLR-SPA, the validation set is employed to guide the
variable selection procedure [20–22]. The core of SPA consist of
projection operations carried out on the calibration data matrix
Xcal (Mc�J), whose lines and columns correspond to Mc
calibration samples and J spectral variables, respectively.
Starting from each of the J variables (columns of Xcal) available
for selection, SPA builds an ordered chain ofMc variables. Each
element in the chain is selected in order to display the least
collinearity with the previous ones. From each of the J chains
constructed in this manner, it is possible to extractMc subsets of
variables by using one up to Mc elements in the order in which
they were selected. Thus, a total of J�Mc subsets of variables
can be formed. In order to choose the most appropriate subset,
MLR models are built and compared in terms of the root-mean-
square error of prediction in the validation set (RMSEV). The
model that leads to the smallest RMSEV is then adopted.
employing n subsampling iterations. The number of latent variables for PLS is
e variable selection procedure in MLR-SPA and MLR-GA is guided by the
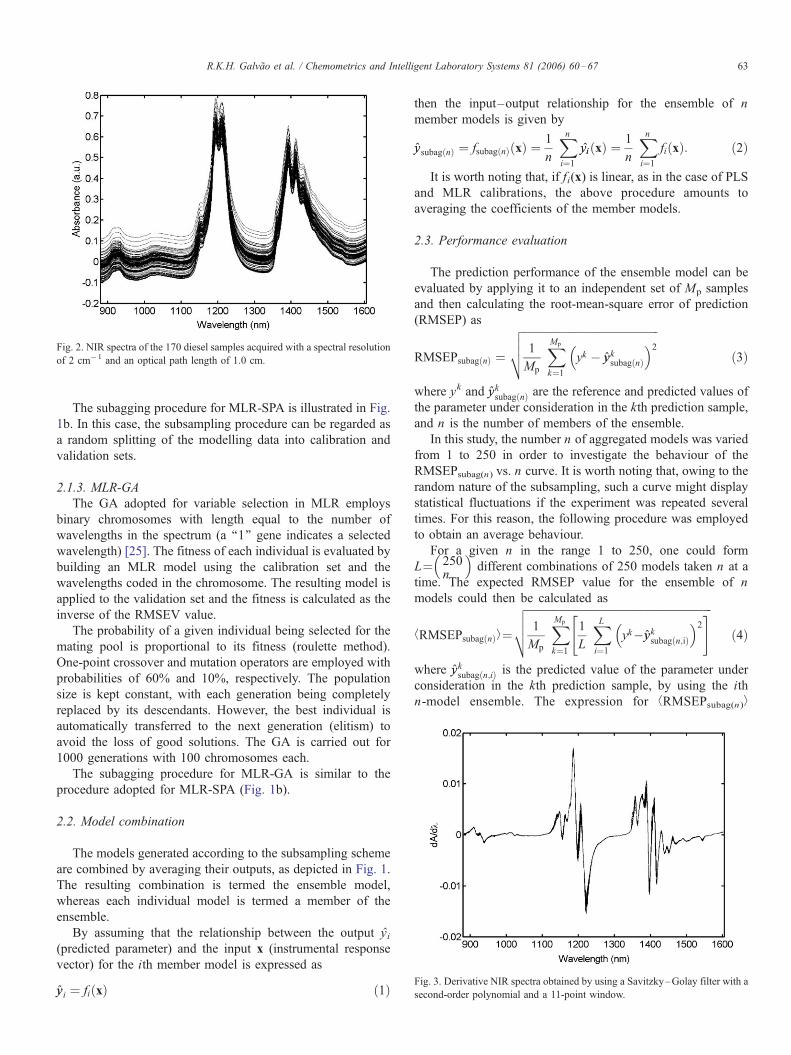
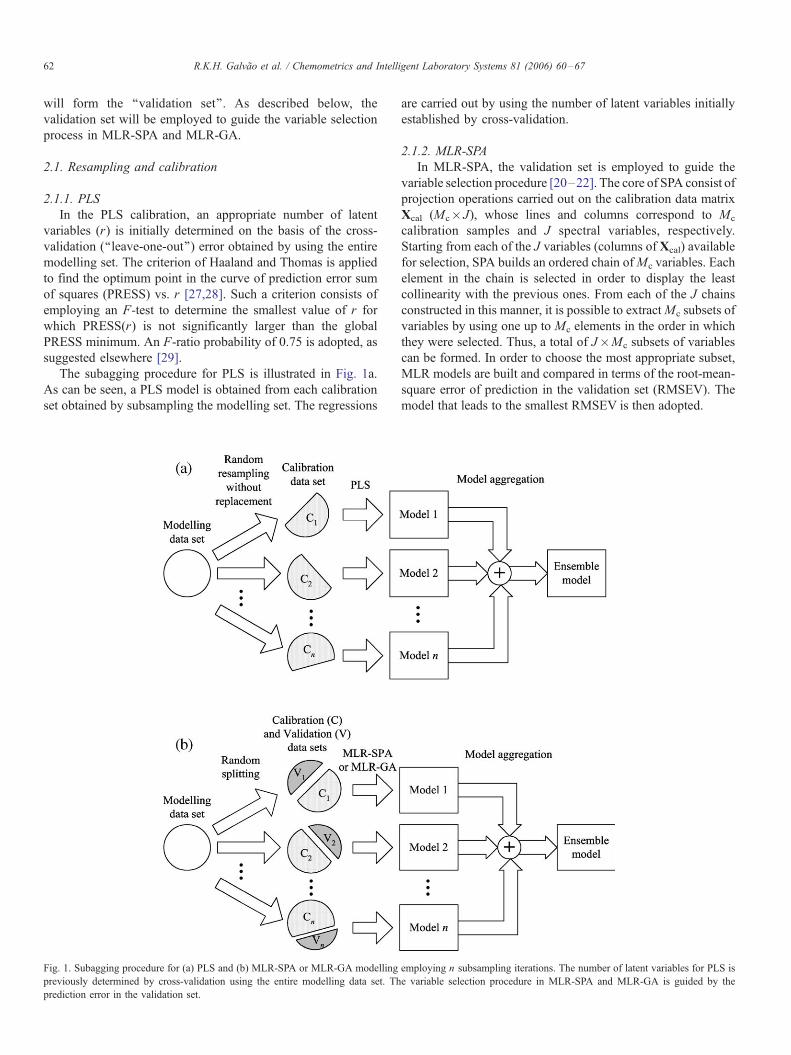
Fig. 2. NIR spectra of the 170 diesel samples acquired with a spectral resolution
of 2 cm� 1 and an optical path length of 1.0 cm.
Fig. 3. Derivative NIR spectra obtained by using a Savitzky–Golay filter with a
second-order polynomial and a 11-point window.
R.K.H. Galvao et al. / Chemometrics and Intelligent Laboratory Systems 81 (2006) 60–67 63
The subagging procedure for MLR-SPA is illustrated in Fig.
1b. In this case, the subsampling procedure can be regarded as
a random splitting of the modelling data into calibration and
validation sets.
2.1.3. MLR-GA
The GA adopted for variable selection in MLR employs
binary chromosomes with length equal to the number of
wavelengths in the spectrum (a ‘‘1’’ gene indicates a selected
wavelength) [25]. The fitness of each individual is evaluated by
building an MLR model using the calibration set and the
wavelengths coded in the chromosome. The resulting model is
applied to the validation set and the fitness is calculated as the
inverse of the RMSEV value.
The probability of a given individual being selected for the
mating pool is proportional to its fitness (roulette method).
One-point crossover and mutation operators are employed with
probabilities of 60% and 10%, respectively. The population
size is kept constant, with each generation being completely
replaced by its descendants. However, the best individual is
automatically transferred to the next generation (elitism) to
avoid the loss of good solutions. The GA is carried out for
1000 generations with 100 chromosomes each.
The subagging procedure for MLR-GA is similar to the
procedure adopted for MLR-SPA (Fig. 1b).
2.2. Model combination
The models generated according to the subsampling scheme
are combined by averaging their outputs, as depicted in Fig. 1.
The resulting combination is termed the ensemble model,
whereas each individual model is termed a member of the
ensemble.
By assuming that the relationship between the output yi(predicted parameter) and the input x (instrumental response
vector) for the ith member model is expressed as
yyi ¼ fi xð Þ ð1Þ
then the input–output relationship for the ensemble of n
member models is given by
yysubag nð Þ ¼ fsubag nð Þ xð Þ ¼1
n
Xni¼1
yiyi xð Þ ¼1
n
Xni¼1
fi xð Þ: ð2Þ
It is worth noting that, if fi(x) is linear, as in the case of PLS
and MLR calibrations, the above procedure amounts to
averaging the coefficients of the member models.
2.3. Performance evaluation
The prediction performance of the ensemble model can be
evaluated by applying it to an independent set of Mp samples
and then calculating the root-mean-square error of prediction
(RMSEP) as
RMSEPsubag nð Þ ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1
Mp
XMp
k¼1yk � yyk
subag nð Þ
� �2vuut ð3Þ
where yk and yyksubag nð Þ are the reference and predicted values of
the parameter under consideration in the kth prediction sample,
and n is the number of members of the ensemble.
In this study, the number n of aggregated models was varied
from 1 to 250 in order to investigate the behaviour of the
RMSEPsubag(n) vs. n curve. It is worth noting that, owing to the
random nature of the subsampling, such a curve might display
statistical fluctuations if the experiment was repeated several
times. For this reason, the following procedure was employed
to obtain an average behaviour.
For a given n in the range 1 to 250, one could form
L¼�250n
�different combinations of 250 models taken n at a
time. The expected RMSEP value for the ensemble of n
models could then be calculated as
bRMSEPsubag nð Þ�¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1
Mp
XMp
k¼1
1
L
XLi¼1
yk�yyksubag n;ið Þ
� �2#"vuut ð4Þ
where yyksubag n;ið Þ is the predicted value of the parameter under
consideration in the kth prediction sample, by using the ith
n-model ensemble. The expression for bRMSEPsubag(n)�
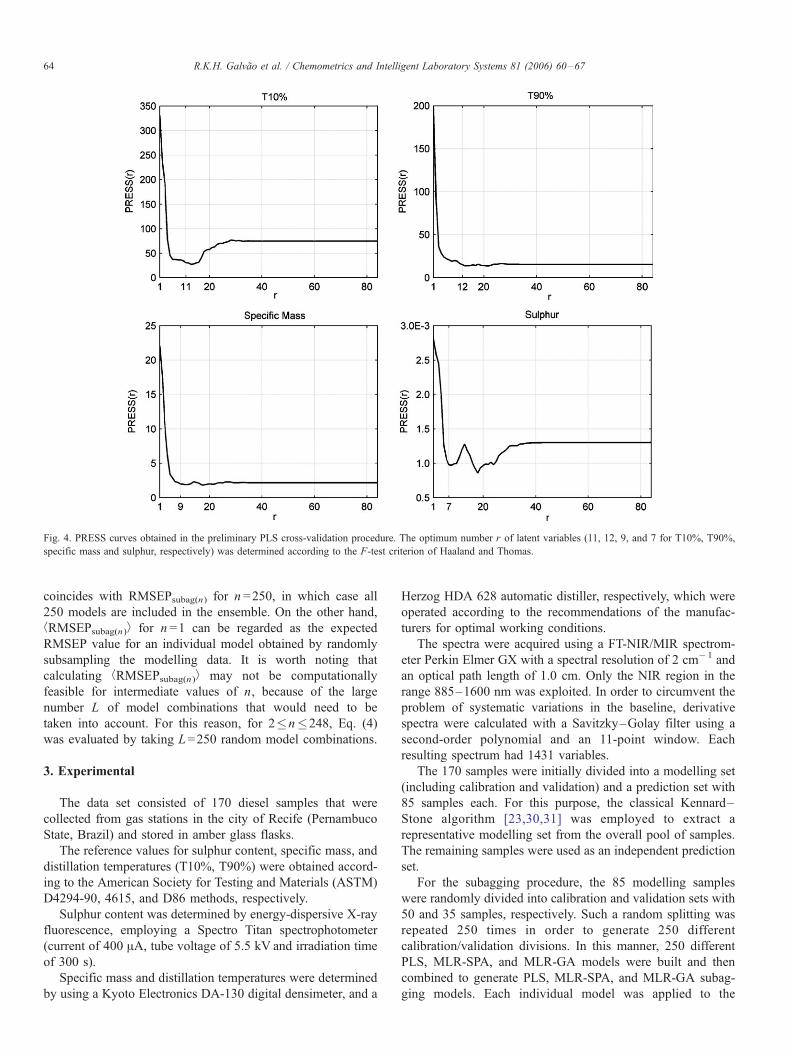
Fig. 4. PRESS curves obtained in the preliminary PLS cross-validation procedure. The optimum number r of latent variables (11, 12, 9, and 7 for T10%, T90%,
specific mass and sulphur, respectively) was determined according to the F-test criterion of Haaland and Thomas.
R.K.H. Galvao et al. / Chemometrics and Intelligent Laboratory Systems 81 (2006) 60–6764
coincides with RMSEPsubag(n) for n =250, in which case all
250 models are included in the ensemble. On the other hand,
bRMSEPsubag(n)� for n =1 can be regarded as the expected
RMSEP value for an individual model obtained by randomly
subsampling the modelling data. It is worth noting that
calculating bRMSEPsubag(n)� may not be computationally
feasible for intermediate values of n, because of the large
number L of model combinations that would need to be
taken into account. For this reason, for 2�n�248, Eq. (4)
was evaluated by taking L=250 random model combinations.
3. Experimental
The data set consisted of 170 diesel samples that were
collected from gas stations in the city of Recife (Pernambuco
State, Brazil) and stored in amber glass flasks.
The reference values for sulphur content, specific mass, and
distillation temperatures (T10%, T90%) were obtained accord-
ing to the American Society for Testing and Materials (ASTM)
D4294-90, 4615, and D86 methods, respectively.
Sulphur content was determined by energy-dispersive X-ray
fluorescence, employing a Spectro Titan spectrophotometer
(current of 400 AA, tube voltage of 5.5 kV and irradiation time
of 300 s).
Specific mass and distillation temperatures were determined
by using a Kyoto Electronics DA-130 digital densimeter, and a
Herzog HDA 628 automatic distiller, respectively, which were
operated according to the recommendations of the manufac-
turers for optimal working conditions.
The spectra were acquired using a FT-NIR/MIR spectrom-
eter Perkin Elmer GX with a spectral resolution of 2 cm�1 and
an optical path length of 1.0 cm. Only the NIR region in the
range 885–1600 nm was exploited. In order to circumvent the
problem of systematic variations in the baseline, derivative
spectra were calculated with a Savitzky–Golay filter using a
second-order polynomial and an 11-point window. Each
resulting spectrum had 1431 variables.
The 170 samples were initially divided into a modelling set
(including calibration and validation) and a prediction set with
85 samples each. For this purpose, the classical Kennard–
Stone algorithm [23,30,31] was employed to extract a
representative modelling set from the overall pool of samples.
The remaining samples were used as an independent prediction
set.
For the subagging procedure, the 85 modelling samples
were randomly divided into calibration and validation sets with
50 and 35 samples, respectively. Such a random splitting was
repeated 250 times in order to generate 250 different
calibration/validation divisions. In this manner, 250 different
PLS, MLR-SPA, and MLR-GA models were built and then
combined to generate PLS, MLR-SPA, and MLR-GA subag-
ging models. Each individual model was applied to the
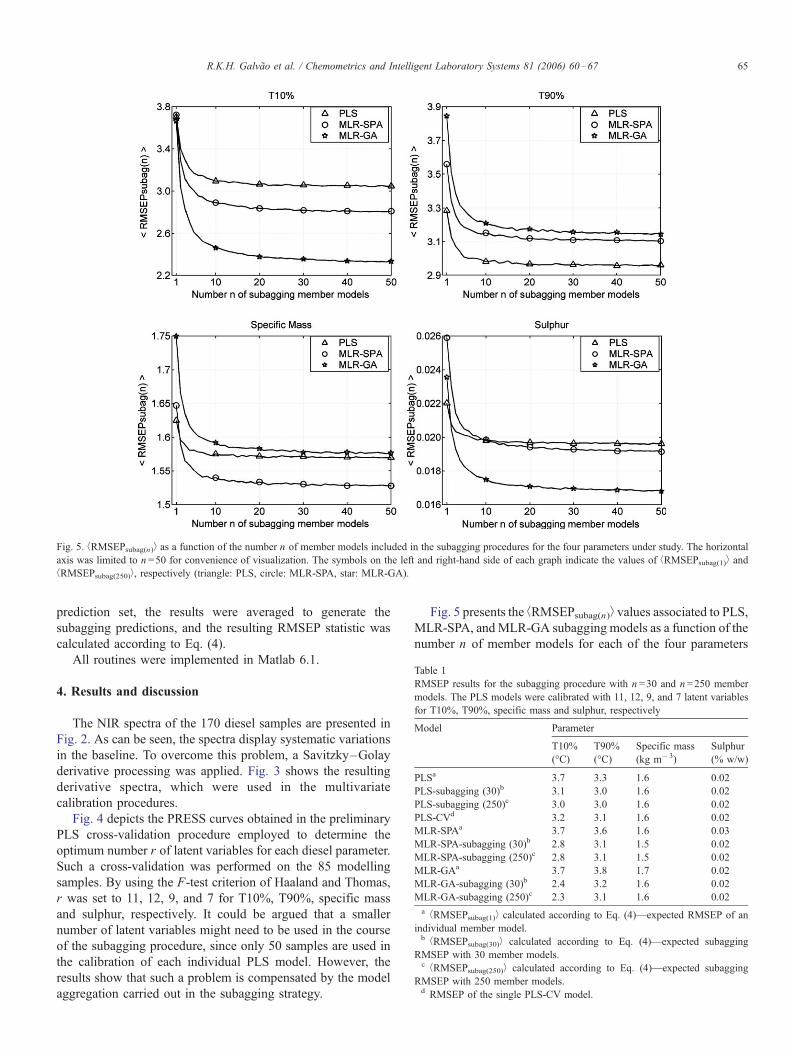
Fig. 5. bRMSEPsubag(n)� as a function of the number n of member models included in the subagging procedures for the four parameters under study. The horizontal
axis was limited to n =50 for convenience of visualization. The symbols on the left and right-hand side of each graph indicate the values of bRMSEPsubag(1)� and
bRMSEPsubag(250)�, respectively (triangle: PLS, circle: MLR-SPA, star: MLR-GA).
Table 1
RMSEP results for the subagging procedure with n =30 and n =250 member
models. The PLS models were calibrated with 11, 12, 9, and 7 latent variables
for T10%, T90%, specific mass and sulphur, respectively
Model Parameter
T10%
(-C)T90%
(-C)Specific mass
(kg m� 3)
Sulphur
(% w/w)
PLSa 3.7 3.3 1.6 0.02
PLS-subagging (30)b 3.1 3.0 1.6 0.02
PLS-subagging (250)c 3.0 3.0 1.6 0.02
PLS-CVd 3.2 3.1 1.6 0.02
MLR-SPAa 3.7 3.6 1.6 0.03
MLR-SPA-subagging (30)b 2.8 3.1 1.5 0.02
MLR-SPA-subagging (250)c 2.8 3.1 1.5 0.02
MLR-GAa 3.7 3.8 1.7 0.02
MLR-GA-subagging (30)b 2.4 3.2 1.6 0.02
MLR-GA-subagging (250)c 2.3 3.1 1.6 0.02
abRMSEPsubag(1)� calculated according to Eq. (4)—expected RMSEP of an
individual member model.bbRMSEPsubag(30)� calculated according to Eq. (4)—expected subagging
RMSEP with 30 member models.cbRMSEPsubag(250)� calculated according to Eq. (4)—expected subagging
RMSEP with 250 member models.d RMSEP of the single PLS-CV model.
R.K.H. Galvao et al. / Chemometrics and Intelligent Laboratory Systems 81 (2006) 60–67 65
prediction set, the results were averaged to generate the
subagging predictions, and the resulting RMSEP statistic was
calculated according to Eq. (4).
All routines were implemented in Matlab 6.1.
4. Results and discussion
The NIR spectra of the 170 diesel samples are presented in
Fig. 2. As can be seen, the spectra display systematic variations
in the baseline. To overcome this problem, a Savitzky–Golay
derivative processing was applied. Fig. 3 shows the resulting
derivative spectra, which were used in the multivariate
calibration procedures.
Fig. 4 depicts the PRESS curves obtained in the preliminary
PLS cross-validation procedure employed to determine the
optimum number r of latent variables for each diesel parameter.
Such a cross-validation was performed on the 85 modelling
samples. By using the F-test criterion of Haaland and Thomas,
r was set to 11, 12, 9, and 7 for T10%, T90%, specific mass
and sulphur, respectively. It could be argued that a smaller
number of latent variables might need to be used in the course
of the subagging procedure, since only 50 samples are used in
the calibration of each individual PLS model. However, the
results show that such a problem is compensated by the model
aggregation carried out in the subagging strategy.
Fig. 5 presents the bRMSEPsubag(n)� values associated to PLS,
MLR-SPA, andMLR-GA subagging models as a function of the
number n of member models for each of the four parameters

Table 2
RMSEP improvements resulting from the subagging procedure with n =30 with
respect to the expected result of individual models (n =1)
Model Parameter
T10%
(-C)
T90%
(-C)
Specific mass
(kg m� 3)
Sulphur
(% w/w)
PLS 16% 9% 0% 0%
MLR-SPA 24% 14% 6% 33%
MLR-GA 35% 16% 6% 0%
R.K.H. Galvao et al. / Chemometrics and Intelligent Laboratory Systems 81 (2006) 60–6766
under study. As can be seen, the subagging promotes a general
improvement in the prediction accuracy as n increases. For
convenience of visualization the graphs are shown up to n =50,
because the curves are seen to converge after the aggregation of
approximately 30 member models.
Table 1 presents the RMSEP results of the different
modelling strategies for each parameter under study. Subagging
results are presented for n =30 and also for n =250. For
comparison, the result of using PLS with full cross-validation
(PLS-CV) is also shown.
In almost all cases presented in Table 1, the use of subagging
with n =30 led to a smaller RMSEP in comparison with the
average result bRMSEPsubag(1)� for individual models (the only
exceptions being the determination of specific mass by PLS and
sulphur by PLS and MLR-GA, in which the RMSEP remained
the same). Such a finding is in accordance with the literature,
which claims that an ensemble model is often more accurate
than its individual members [6,8]. Moreover, PLS-subagging
displayed a smaller RMSEP than PLS with full cross-validation
(PLS-CV) for T10% and T90%. In general, extending the
subagging from n =30 to n =250 did not promote further
reductions in the RMSEP values, which is in agreement with the
convergence of the curves observed in Fig. 5. The only
exceptions were the determination of T10% by PLS and
T10%, T90% by MLR-GA. However, such improvements
may not justify the additional computational workload required.
In order to better assess the subagging benefits, a relative
RMSEP reduction was evaluated as
bRMSEPsubag 1ð Þ�� bRMSEPsubag 30ð Þ�
bRMSEPsubag 1ð Þ�� 100% ð5Þ
which indicates the improvement obtained with n =30 with
respect to the expected result of individual models (n =1).
The improvements calculated in this manner are presented in
Table 2. As can be seen, the largest RMSEP reductions were
achieved with MLR-SPA (up to 33%) and mainly with MLR-
GA (up to 35%). The PLS results were less affected by the
subagging procedure, with improvements up to 16%.
5. Conclusions
There has been a growing interest in using bagging strategies
for classification tasks, in which improvements have been
reported over the use of individual models. However, such a
research in the context of multivariate calibration has been
comparatively smaller and mostly focused on the training of
neural networks.More recently, the concept of subagging, which
employs subsampling rather than bootstrapping to generate
different calibration sets, was proposed to achieve the benefits of
bagging at a smaller computational cost. The present paper
demonstrated that subagging can be useful in conjunction with
two of the most popular multivariate calibration methods (PLS
and MLR). The proposed subagging strategy is aimed at
analytical problems involving complex matrices, where the
calibration set must be extracted from a pool of real samples.
For illustration purposes, a multivariate calibration problem
involving the determination of four diesel quality parameters
(specific mass, sulphur content, and the distillation tempera-
tures T10% and T90% at which 10% and 90% of the sample
has evaporated, respectively) by NIR spectrometry was
addressed. The results showed that the subagging procedure
leads to a general improvement in the prediction accuracy of
the multivariate calibration models for the parameters under
study. In particular, the largest improvements were achieved for
the MLR models with variable selection by SPA and GA. The
comparatively smaller improvements obtained for PLS may be
ascribed to the statistical stability of PLS regression. In fact,
bagging/subagging strategies were mainly devised for methods
that show instability with respect to changes in the composition
of the calibration set.
Future works could exploit the iterated bagging methodol-
ogy [13] to reduce the bias term of the mean-square prediction
error, which was not exploited in the present paper. Moreover,
other optimization methods for variable selection (such as
simulated annealing [32] and ant colonies [33]) may also
benefit from the use of bagging or subagging to reduce
statistical fluctuations.
Acknowledgments
The authors thank FINEP-CTPETRO (Grant 0652/00)
science funding program, PROCAD/CAPES (Grant 0064/01-
7), CNPq (Grant 475204/2004-2 and PRONEX Grant 015/98),
and FAPESP (Grant 03/09433-5) for partial financial support.
The research fellowships and scholarships granted by CNPq and
CAPES are also gratefully acknowledged. The authors are
indebted to Mr. Claudio Vicente Ferreira (Laboratorio de
Combustıveis, Departamento de Engenharia Quımica, Univer-
sidade Federal de Pernambuco) for providing the diesel samples
and the reference values of the quality parameters employed in
this study.
References
[1] P.I. Good, Resampling Methods: A Practical Guide to Data Analysis,
Birkhauser, Boston, 1999.
[2] R.O. Duda, P.E. Hart, D.G. Stork, Pattern Classification, 2nd edR, Wiley,
New York, 2001.
[3] B. Efron, The Jackknife, The Bootstrap and Other Resampling Plans,
SIAM, Philadelphia, 1982.
[4] A.C. Davison, D.V. Hinkley (Eds.), Bootstrap Methods and their
Application, Cambridge Univ. Press, Cambridge, UK, 1997.
[5] B.M. Smith, P.J. Gemperline, J. Chemom. 16 (2002) 241–246.
[6] D.W. Opitz, R.J. Maclin, Artif. Intell. Res. 11 (1999) 169–198.
[7] M. Skurichina, R.P.W. Duin, Pattern Recogn. 31 (1998) 909–930.
R.K.H. Galvao et al. / Chemometrics and Intelligent Laboratory Systems 81 (2006) 60–67 67
[8] L.K. Hansen, P. Salamon, IEEE Trans, Pattern Anal. Mach. Intell. 12
(1990) 993–1001.
[9] E. Bauer, R. Kohavi, Mach. Learn. 36 (1999) 105–139.
[10] M. Taniguchi, V. Tresp, Neural Comput. 9 (1997) 1163–1178.
[11] L. Breiman, Mach. Learn. 24 (1996) 123–140.
[12] L. Breiman, Mach. Learn. 24 (1996) 49–64.
[13] L. Breiman, Mach. Learn. 45 (2001) 261–277.
[14] M. Sugimoto, S. Kikuchi, M. Arita, T. Soga, T. Nishioka, M. Tomita,
Anal. Chem. 77 (2005) 78–84.
[15] D.K. Agrafiotis, W. Cedeno, V.S. Lobanov, J. Chem. Inf. Comput. Sci. 42
(2002) 903–911.
[16] E.B. Martin, A.J. Morris, in: J.W. Kay, D.M. Titterington (Eds.), Statistics
and Neural Networks—Advances at the Interface, Oxford Univ. Press,
Oxford, 1999, pp. 195–258.
[17] P. Buhlmann, B. Yu, Ann. Stat. 30 (2002) 927–961.
[18] D.L. Massart, B.G.M. Vandeginste, L.M.C. Buydens, S. De Jong, P.J.
Lewi, J. Smeyers-Verbeke, Handbook of Chemometrics and Qualimetrics:
Part A, Elsevier, Amsterdam, 1997.
[19] R.K.H. Galvao, M.C.U. Araujo, G.E. Jose, M.J.C. Pontes, E.C. Silva,
T.C.B. Saldanha, Talanta 67 (2005) 736–740.
[20] M.C.U. Araujo, T.C.B. Saldanha, R.K.H. Galvao, T. Yoneyama, H.C.
Chame, V. Visani, Chemom. Intell. Lab. Syst. 57 (2001) 65–73.
[21] R.K.H. Galvao, M.F. Pimentel, M.C.U. Araujo, T. Yoneyama, V. Visani,
Anal. Chim. Acta 443 (2001) 107–115.
[22] R.K.H. Galvao, G.E. Jose, H.A. Dantas Filho, M.C.U. Araujo, E.C. Silva,
H.M. Paiva, T.C.B. Saldanha, E.S.O.N. Souza, Chemom. Intell. Lab. Syst.
70 (2004) 1–10.
[23] K.R. Kanduc, J. Zupan, N. Majcen, Chemom. Intell. Lab. Syst. 65 (2003)
221–229.
[24] C. Abrahamsson, J. Johansson, A. Sparen, F. Lindgren, Chemometr. Intell.
Lab. Syst. 69 (2003) 3–12.
[25] R. Leardi, J. Chemom. 15 (2001) 559–569.
[26] C.T. Mansfield, B.N. Barman, Anal. Chem. 71 (1999) 81R–107R.
[27] D.M. Haaland, E.V. Thomas, Anal. Chem. 60 (1988) 1193–1202.
[28] J. Moros, F.A. Inon, S. Garrigues, M. de la Guardia, Anal. Chim. Acta 538
(2005) 181–193.
[29] B.X. Li, D.M. Wang, C.L. Xu, Z.J. Zhang, Microchim. Acta 149 (2005)
205–212.
[30] R.W. Kennard, L.A. Stone, Technometrics 11 (1969) 137–148.
[31] E. Bouveresse, C. Hartmann, D.L. Massart, I.R. Last, K.A. Prebble, Anal.
Chem. 68 (1996) 982–990.
[32] S.P. Brooks, N. Friel, R. King, J. R. Stat. Soc., B 65 (2003) 503–520.
[33] Q. Shen, J.H. Jiang, J.C. Tao, G.L. Shen, R.Q. Yu, J. Chem. Inf. Model 45
(2005) 1024–1029.