a parameter-uniform implicit difference scheme for solving time-dependent burgers' equations
TRANSCRIPT
Applied Mathematics and Computation 170 (2005) 1365–1393
www.elsevier.com/locate/amc
A parameter-uniform implicitdifference scheme for solving
time-dependent Burgers� equations
Mohan K. Kadalbajoo a, K.K. Sharma b, A. Awasthi c,*
a Department of Mathematics, I.I.T-Kanpur, Kanpur 208 016, Indiab Department of Mathematics, Punjab University, Chandigarh 160 014, India
c Department of Mathematics, I.I.T-Kanpur, Kanpur 208 016, India
Abstract
A numerical study is made for solving one dimensional time dependent Burgers�equation with small coefficient of viscosity. Burgers� equation is one of the fundamental
model equations in the fluid dynamics to describe the shock waves and traffic flows. For
high coefficient of viscosity a number of solution methodology exist in the literature [6–
9] and [14] but for the sufficiently low coefficient of viscosity, the exist solution method-
ology fail and a discrepancy occurs in the literature. In this paper, we present a numer-
ical method based on finite difference which works nicely for both the cases, i.e., low as
well as high viscosity coefficient. The method comprises a standard implicit finite differ-
ence scheme to discretize in temporal direction on uniform mesh and a standard upwind
finite difference scheme to discretize in spacial direction on piecewise uniform mesh. The
quasilinearzation process is used to tackle the non-linearity. An extensive amount of
analysis has been carried out to obtain the parameter uniform error estimates which
show that the resulting method is uniformly convergent with respect to the parameter.
0096-3003/$ - see front matter � 2005 Elsevier Inc. All rights reserved.
doi:10.1016/j.amc.2005.01.032
* Corresponding author. Tel.: +915122597732; fax: +915122597500.
E-mail addresses: [email protected] (M.K. Kadalbajoo), [email protected] (K.K. Sharma),
[email protected] (A. Awasthi).

1366 M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393
To illustrate the method, numerical examples are solved using the presented method and
compare with exact solution for high value of coefficient of viscosity.
� 2005 Elsevier Inc. All rights reserved.
Keywords: Burgers� equation; Euler implicit method; Quasilinearization; Shishkin mesh; Uniform
convergence
1. Introduction
In this paper, we examine the one dimensional time dependent Burgers�equation with small coefficient of viscosity. This is a homogeneous quasilinear
parabolic parabolic partial differential equation which is encountered in themathematical modeling of turbulent fluid and shock waves and considered as
one of the fundamental model equation in the fluid dynamics to describe the
shock waves and traffic flows. Such type of equations can be found in the paper
of Batman [1] in 1915. In 1948, Burgers [2] introduced this equation to capture
some features of turbulent fluid in a channel caused by the interaction of the
opposite effects of convection and diffusion.
The numerical solution of the convection dominating Burgers� equation in
one space dimension has been studied extensively. In 1972, Benton and Platz-man [3] published a number of distinct solutions to the initial value problems
for the Burgers� equation in the infinite domain as well as in the finite domain.
In 1996, Ozis and Ozdes [13] applied the variational method, from which they
succeeded to generate an approximate solution in the form of sequence solu-
tion which converges to the exact solution. In 1997, Mazzia and Mazzia [12]
converted Burgers� equation to a system of ordinary differential equations,
and then applied the transverse scheme in combination with boundary value
methods. In 1996, Mittal and Singhal [11] presented a numerical approxima-tion of the one dimensional Burgers� equations, they truncated one dimensional
Fourier expansion with time dependent coefficients and formulated as the
approximated problem which consisted of a system of non-linear ordinary dif-
ferential equations for the coefficients. They also extended their work to study
Burgers� equation with periodic boundary conditions.
For small values of the coefficient of viscosity �, one of the major difficulties
encountered is due to inviscid boundary layers produced by the steeping effect
of the non-linear advection term in Burgers� equation. In case where the coef-ficient of viscosity 610�5, the exact solution is not available and a discrepancy
exits in the literature see [16].
Here we construct the numerical method for solving the Burgers� equationwith small �, i.e., the coefficient of viscosity, whose convergence behavior in
the global maximum norm is parameter-uniform, i.e. �-uniform. We first semi
discretize the original non-linear Burgers�equation in the temporal direction by

M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393 1367
backward Euler scheme with the constant time step which produces a set of sta-
tionary Burgers� equations. Then use the quasilinearization process [4] to line-
arize the stationary Burgers� equation obtained from semi discretization and
shown that the sequence of solutions of linearized problem converges quadrat-
ically to the solution of the original non-linear problem at each time step. For
totally discrete scheme, we discretize the set of linear problems resulting fromthe time semidiscretization using the simple upwind finite difference scheme
defined on an appropriate piecewise uniform mesh of Shishkin type. We
decompose the global error in two components, which are analyzed separately
and obtain parameter uniform error estimates for the totally discrete method.
Throughout the paper we denote C (sometimes subscripted), a generic posi-
tive constant independent of � and of the mesh.
2. The continuous problem
Consider the Burgers� equation
ouot
þ uouox
¼ �o2uox2
; ðx; tÞ 2 X � ð0; T �; ð2:1aÞ
where
X ¼ ð0; 1Þ;With initial condition
uðx; 0Þ ¼ f ðxÞ for 0 6 x 6 1; ð2:1bÞand boundary conditions
uð0; tÞ ¼ 0 uð1; tÞ ¼ 0 for 0 6 t 6 T ; ð2:1cÞwhere � > 0 is the coefficient of kinematic viscosity and the prescribed function
f(x) is sufficiently smooth.
We impose the compatibility conditions
f ð0Þ ¼ 0; f ð1Þ ¼ 0; ð2:2Þso that the data matches at the two corners (0,0) and (1,0) of the domainX � ½0; T �.
These conditions guarantee that there exits a constant C such that for
0 < � 6 1 and for all ðx; tÞ 2 X � ½0; T �, (see Bobisud [5]).
juðx; tÞ � f ðxÞj 6 Ct; t 2 ð0; T �; ð2:3Þ
juðx; tÞ � 0j 6 Cx; x 2 ð0; 1Þ; ð2:4ÞUsing the properties of norm, Eq. (2.3) is written as
juðx; tÞ � f ðxÞj 6 juðx; tÞ � f ðxÞj 6 Ct; t 2 ð0; T � ð2:5Þ

1368 M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393
i.e.
juj 6 Ct þ jf jsince f(x) is sufficiently smooth and x and t also lie in the bounded interval, it is
clear with the above relations that the solution u is bounded i.e.
juðx; tÞj 6 C; ðx; tÞ 2 X � ½0; T �: ð2:6Þ
Lemma 1. By keeping x fixed along the line {(x, t):0 6 t 6 T} the bound of ut is
given by
jutðx; tÞj 6 C ð2:7Þ
Proof. We assume that the solution u(x, t) is sufficiently smooth in the domain
X � ½0; T � and by mean value theorem there exits a t* in the interval (t, t + k)
along the line {(x, t):0 6 t 6 T} such that
utðx; t�Þ ¼uðx; t þ kÞ � uðx; tÞ
k;
jutðx; t�Þj 62juðx; tÞj
k
ð2:8Þ
using Eq. (2.6), we get
jutðx; tÞj 6 C: ð2:9ÞSimilarly we get the bounds of the utt(x, t) and uttt(x, t) along the line,
{(x, t):0 6 t 6 T}, i.e. we have
oiuðx; tÞoti
���� ���� 6 C for i ¼ 0; 1; 2; 3: � ð2:10Þ
3. The time semidiscretization
We can write Eq. (2.1) in the following form:
ut ¼ �uxx � uux forðx; tÞ 2 X � ð0; T �:Discretizing the time variable by means of Euler implicit method with uniform
size Dt, we obtain
u0 ¼ f ðxÞ; ð3:11aÞ
ujþ1 � ujDt
¼ ½�uxx � uux�jþ1;¼ ½�ujþ1�xx � ujþ1½ujþ1�x 0 6 j 6 M � 1
ð3:11bÞ

M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393 1369
with the boundary conditions
ujþ1ð0Þ ¼ 0; ujþ1ð1Þ ¼ 0 for j ¼ 0; 1; . . . ;M � 1: ð3:11cÞwhere uj+i is the solution of the above differential equation at the (j + 1)th time
step. The differential Eq. (3.11) can be written in the following form:
u0 ¼ f ðxÞ; ð3:12aÞ
��Dt½ujþ1�xx þ ½1þ Dt½ujþ1�x�ujþ1 ¼ uj; 0 6 j 6 M � 1 ð3:12bÞwith the boundary conditions,
ujþ1ð0Þ ¼ 0; ujþ1ð1Þ ¼ 0 for j ¼ 0; 1; . . . ;M � 1: ð3:12cÞEq. (3.12) is non-linear ordinary differential equation for each j lying between 0
to M � 1.
4. Quasilinearization
Using quasilinearization process we linearize the above non-linear ordinary
differential equations and followed by simplification yields
uðnþ1Þ0 ¼ f ðxÞ; ð4:13aÞ
��Dt uðnþ1Þjþ1
h ixxþ Dtðuðnþ1Þ
jþ1 ÞxuðnÞjþ1 þ 1þ DtðuðnÞjþ1Þx
h iuðnþ1Þjþ1
¼ uðnþ1Þj þ DtðuðnÞjþ1Þxu
ðnÞjþ1; 0 6 j 6 M � 1; ð4:13bÞ
with boundary conditions
uðnþ1Þjþ1 ð0Þ ¼ 0; uðnþ1Þ
jþ1 ð1Þ ¼ 0: ð4:13cÞ
with initial guess u(0) and n is the iteration index.
Using the notation u(n+1) = U the above equation can be written as
U 0 ¼ f ðxÞ ð4:14aÞ
��DtðUjþ1Þxx þ DtðuðnÞjþ1ÞðUjþ1Þx þ 1þ DtðuðnÞjþ1Þh i
Ujþ1
¼ Uj þ DtðuðnÞx Þjþ1uðnÞjþ1: ð4:14bÞ
For the simplicity we use the following notations:
1
Dtþ ðuðnÞjþ1Þx
� �¼ aðnÞðxÞ;
uðnÞjþ1 ¼ bðnÞðxÞ;

1370 M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393
Uj
Dtþ uðnÞjþ1
� �xðuðnÞjþ1Þ
� �¼ F ðnÞðxÞ:
Using the above notations Eq. (4.14) can be written in the following form:
U 0 ¼ f ðxÞ ð4:15aÞ
� �ðUjþ1ðxÞÞxx þ bðnÞðxÞðUjþ1ðxÞÞx þ aðnÞðxÞUjþ1ðxÞ ¼ F ðnÞðxÞ;j ¼ 0ð1ÞM � 1: ð4:15bÞ
We assume that a is the lower bound of the b(n)(x), i.e.
bðnÞðxÞ P a > 0; x 2 X: ð4:16Þ
Writing Eq. (4.15) in the following form:
U 0 ¼ f ðxÞ;L�Ujþ1ðxÞ ¼ F ðnÞðxÞ; 0 6 j 6 M � 1;
ð4:17Þ
where
L�Ujþ1ðxÞ � ��ðUjþ1Þxx þ bðnÞðxÞðUjþ1ÞxðxÞ;þaðnÞðxÞUjþ1ðxÞ
with boundary conditions
Ujþ1ð0Þ ¼ 0; Ujþ1ð1Þ ¼ 0:
4.1. Convergence of quasilinearization process
For the sake of simplicity we consider the following form of equation:
ðUjþ1ÞxxðxÞ ¼ HðUjþ1Þ ð4:18Þwith boundary conditions
Ujþ1ð0Þ ¼ 0; Ujþ1ð1Þ ¼ 0:
We assume that U ð0Þjþ1ðxÞ be the initial guess. Consider the sequence obtained by
the following recurrence relation:
ðU ðnþ1Þjþ1 Þxx ¼ HðU ðnÞ
jþ1Þ þ ðU ðnþ1Þjþ1 � U ðnÞ
jþ1ÞHUjþ1ðU ðnÞ
jþ1Þ ð4:19Þ
with boundary conditions
U ðnþ1Þjþ1 ð0Þ ¼ 0; U ðnþ1Þ
jþ1 ð1Þ ¼ 0:

M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393 1371
Subtracting the (n + 1)th equation from (n + 2)th equation, we have
U ðnþ2Þjþ1 � U ðnþ1Þ
jþ1
� �xx¼ HðU ðnþ1Þ
jþ1 Þ � HðU ðnÞjþ1Þ
� ðU ðnþ1Þjþ1 � U ðnÞ
jþ1ÞHUjþ1ðU ðnÞ
jþ1Þ þ HUjþ1ðU ðnþ1Þ
jþ1 Þ
� ðU ðnþ2Þjþ1 � U ðnþ1Þ
jþ1 Þ: ð4:20Þ
The above equation is a differential equation for ðU ðnþ2Þjþ1 � U ðnþ1Þ
jþ1 Þ, and convert-
ing into an integral equation, we have
ðU ðnþ2Þjþ1 � U ðnþ1Þ
jþ1 Þ ¼Z 1
0
Gðx; sÞ½HðU ðnþ1Þjþ1 Þ � HðU ðnÞ
jþ1Þ
� ðU ðnþ1Þjþ1 � U ðnÞ
jþ1ÞHUjþ1ðU ðnÞ
jþ1Þ þ HUjþ1
� ðU ðnþ1Þjþ1 ÞðU ðnþ2Þ
jþ1 � U ðnþ1Þjþ1 Þ�ds; ð4:21Þ
where the Green�s function
Gðx; sÞ ¼xðs� 1Þ; 0 6 x 6 s 6 1;
ðx� 1Þs; 0 6 s 6 x 6 1;
maxx;s
Gðx; sÞ ¼ 1
4:
ð4:22Þ
The mean-value theorem gives us
HðU ðnþ1Þjþ1 Þ ¼ HðU ðnÞ
jþ1Þ þ ðU ðnþ1Þjþ1 � U ðnÞ
jþ1ÞHUjþ1ðU ðnÞ
jþ1Þ
þðU ðnþ1Þ
jþ1 � U ðnÞjþ1Þ
2
2HUjþ1Ujþ1
ðhÞ; ð4:23Þ
where h lies between U ðnÞjþ1 and U ðnþ1Þ
jþ1 .
Using Eq. (4.23), Eq. (4.21) become
ðU ðnþ2Þ � U ðnþ1Þjþ1 Þ ¼
Z 1
0
Gðx; sÞ
�ðU ðnþ1Þ
jþ1 � U ðnÞjþ1Þ
2
2HUjþ1Ujþ1
ðhÞ þ HUjþ1ðU ðnþ1Þ
jþ1 ÞðU ðnþ2Þjþ1 � U ðnþ1Þ
jþ1 Þ" #
ds:
ð4:24ÞDefine
k ¼ maxjUjþ1j61
jHUjþ1Ujþ1ðUjþ1Þj and m ¼ max
jUjþ1j61jHUjþ1
ðUjþ1Þj: ð4:25Þ

1372 M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393
Now Eq. (4.24) become
U ðnþ2Þjþ1 � U ðnþ1Þ
jþ1
� ���� ��� 6 1
4
Z 1
0
k2
U ðnþ1Þjþ1 � U ðnÞ
jþ1
� �2
þ m U ðnþ2Þjþ1 � U ðnþ1Þ
jþ1
��� ���� �ds:
ð4:26ÞTaking the maximum over x on both sides of the above inequality and aftersimplification, we have
maxx
ðU ðnþ2Þjþ1 � U ðnþ1Þ
jþ1 Þ��� ��� 6 k
8
1� m4
� maxx
ðU ðnþ1Þjþ1 � U ðnÞ
jþ1Þ2: ð4:27Þ
The inequality (4.27) shows that the convergence of quasilinearization processis quadratic.
4.2. Maximum principle [15]
Assume that any function W 2 C2ðXÞ satisfies w(0) P 0 and w(1) P 0. Then,
L�w(x) P 0 for all x 2 X implies that w(x) P 0 for all x 2 X.
Proof. Let x* be such that wðx�Þ ¼ minXwðxÞ and suppose that w(x*) < 0. It isclear that x* 62 {0,1}. Therefore wx(x*) = 0,wxx(x*) P 0, and
L�wðx�Þ ¼ ��wxxðx�Þ þ bðnÞðx�Þwxðx�Þ þ aðnÞðx�Þwðx�Þ; ð4:28Þsince a(n)(x) P 0 for all x 2 X therefore
L�wðx�Þ < 0;
which contradicts the assumption, therefore it follows that w(x*) P 0 and thus
w(x) P 0 for all x 2 X. h
4.3. Local error
The local truncation error is given by the following relation:
ejþ1 ¼ Uðtjþ1Þ � Ujþ1;
where Uj+i is the solution of the semidiscretized Eq. (4.14). With the help of this
local error at each time step, we will find the global error of the time discreti-
zation which is defined as
Ej � Uðx; tjÞ � UjðxÞ:
k Æ kh denotes the discrete maximum norm, given by
kxkh ¼ max16i6N
kxik

M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393 1373
Theorem 1. If
okuðx; tÞokt
���� ���� 6 C; ðx; tÞ 2 X � ½0; T �; 0 6 k 6 2 ð4:29Þ
then the local and global error estimates satisfy the following estimates
kejþ1kh 6 CðDtÞ2: ð4:30Þ
kEjþ1kh 6 CDt for all j 6 T=Dt: ð4:31ÞTherefore, the time discretisation process is uniformly convergent of first-order.
Proof. The function Uj+1 satisfies
L�Ujþ1 ¼ F ðnÞðxÞ: ð4:32ÞLinearize the original problem by quasilinearization process, we have
oUot
¼ ��Uxx þ uðnÞUx þ uðnÞx U þ uðnÞðuðnÞÞx; ð4:33Þ
where
U ¼ uðnþ1Þ
Since the solution of Eq. (4.33) is smooth enough, it holds
UðtjÞ ¼ Uðtjþ1Þ � DtoUðtjþ1Þ
otþZ tj
tjþ1
ðtj � sÞ o2uot2
ðsÞds ð4:34Þ
Using Eq. (4.33), we have
UðtjÞ ¼ Uðtjþ1Þ � Dt �Uxx � uðnÞUx � uðnÞx U � uðnÞðuðnÞÞx�
ðtjþ1Þ
þZ tj
tjþ1
ðtj � sÞ o2UðsÞot2
ds: ð4:35Þ
Subtracting Eq. (4.14) from Eq. (4.35), we get
DtL�ejþ1 ¼ OðDtÞ2 ð4:36ÞSince the operator (DtL�) satisfies the maximum principle therefore
kðDtL�Þ�1kh 6 C1 ð4:37Þwhere C1 is a positive constant independent on Dt. Using the inequality (4.37)
we get
kejþ1kh 6 CðDtÞ2: ð4:38ÞUsing the local error estimates up to the jth time step we get the following glo-
bal error estimate at (j + 1)th time step:

1374 M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393
kEjþ1kh ¼Xj
l¼1
el
����������h
; j 6 T=Dt;
6 ke1kh þ ke2kh þ . . .þ kejkh;6 C1ðj:DtÞ:Dt; using Eq:ð4:38Þ;6 C1TDt since jDt 6 T ;
¼ CDt;
ð4:39Þ
where C is a positive constant independent of � and Dt.
4.4. Bounds for U and its derivatives
Lemma 2. Let Uj+1(x) be the solution of Eq. (4.15), there exits a constant Csuch that
jUjþ1ðxÞj 6 C for all x 2 X: ð4:40Þ
Proof. By the construction of barrier functions we find the bounds of Uj+1(x),
w�ðxÞ ¼ Mð1þ xÞ � Ujþ1ðxÞ; ð4:41Þwhere M is a constant chosen sufficiently large such that
w�ð0Þ P 0; wð1Þ P 0;
L�w�ðxÞ ¼ MbðnÞðxÞ þ aðnÞðxÞð1þ xÞ � F ðnÞðxÞ; x 2 X:
Since x 2 X, and a(n)(x) P 0 therefore
L�w�ðxÞ P 0; x 2 X: ð4:42Þ
Using maximum principle for L� we have,
w�ðxÞ P 0; x 2 X
Mð1� xÞ � Ujþ1ðxÞ P 0;
jUjþ1ðxÞj 6 Mð1� xÞ; x 2 X
ð4:43Þ
and so
jUjþ1ðxÞj 6 C for all x 2 X:
Theorem 2. Let Uj+i be the the solution of Eq. (4.17), the bounds of its deriva-
tives are given by
jU ðkÞjþ1j 6 Cð1þ ��ke�að1�xÞ=�Þ for all x 2 X; k ¼ 1; 2; 3: ð4:44Þ

M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393 1375
Proof. We find the bounds of the derivatives of Uj+i with the help of induction.
By the differentiating Eq. (4.15) k times w. r. t. x we have
L�UðkÞjþ1ðxÞ ¼ F kðxÞ for 0 6 k 6 3;
where
F 0 ¼ F
F k ¼ F ðkÞ �Xk�1
s¼0
k
s
� �bðk�sÞU ðsþ1Þ þ
k
s
� �aðk�sÞU ðsÞ
� �for 1 6 k 6 3:
Assume that for all l, 0 6 l 6 k, the following estimates hold:
jU ðlÞjþ1ðxÞj 6 C 1þ ��le
�að1�xÞ�
� �; x 2 X;
where a is the lower bound of b(n)(x).
From the above assumption we have
L�UðkÞjþ1 ¼ F k;
where
jU ðkÞjþ1ðxÞj 6 C 1þ ��ke
�að1�xÞ�
� �;
F kðxÞ 6 C 1þ ��ke�að1�xÞ
�
� �:
And at the boundaries we have
jU ðkÞjþ1ð0Þj 6 C 1þ ��ke
�a�
� ;6 Cð1þ ��ðk�1ÞÞ since e
�a� 6 1 6 ��1; ð4:45Þ
jU ðkÞjþ1ð1Þj 6 Cð1þ ��kÞ: ð4:46Þ
Since � 6 1, this implies that
��ðk�1Þ P 1 for 1 6 k 6 3:
Using the above fact in Eqs. (4.45) and (4.46),
jU ðkÞjþ1ð0Þj 6 C��ðk�1Þ; jU ðkÞ
jþ1ð1Þj 6 C��k:
Defining
hkðxÞ ¼1
�
Z 1
xF kðsÞe�ðAðxÞ�AðsÞÞ ds;
where
AðxÞ ¼Z 1
xbðnÞðsÞds:

1376 M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393
The particular solution of
L�UðkÞjþ1 ¼ F k;
is given by
ðUjþ1ÞpðxÞ ¼ �Z 1
xhkðsÞds:
Its general solution can be written in the form of
U ðkÞjþ1 ¼ ðUjþ1ÞðkÞp þ ðUjþ1ÞðkÞh ;
where the homogeneous solution ðUjþ1ÞðkÞh satisfies
L�ðUjþ1ÞðkÞh ¼ 0;
ðUjþ1ÞðkÞh ð0Þ ¼ U ðkÞjþ1ð0Þ � ðUjþ1ÞðkÞp ð0Þ;
ðUjþ1ÞðkÞh ð1Þ ¼ U ðkÞjþ1ð1Þ:
Introducing the function
/ðxÞ ¼R 1
x e�AðsÞ=� dsR 1
0e�AðsÞ=� ds
;
we have, L�/ ¼ 0;/ð0Þ ¼ 1;/ð1Þ ¼ 0 and 0 6 /ðxÞ 6 1:Now ðUjþ1Þkh can be written as
ðUjþ1ÞðkÞh ðxÞ ¼ U ðkÞjþ1ð0Þ � ðUjþ1ÞðkÞp ð0Þ/ðxÞ þ U ðkÞ
jþ1ð1� /ðxÞÞ ð4:47Þ
The above leads the following expression for U ðkþ1Þjþ1 :
U ðkþ1Þjþ1 ¼ ðUjþ1Þðkþ1Þ
p þ ðUjþ1Þðkþ1Þh
¼ hkðxÞ þ ðUjþ1ð0Þ � ðUjþ1ÞðkÞp ð0ÞÞ/xðxÞ þ U ðkÞjþ1ð1Þð�/xðxÞÞ:
Since
/xðxÞ ¼�e�AðxÞ=�R 1
0eAðsÞ=� ds
;
the upper and lower bound of b(n)(x) lead the estimate
j/xðxÞj 6 C��1e�að1�xÞ=�:
Furthermore
jhkðxÞj 6 C��1
Z 1
xð1þ ��ke�að1�sÞ=�Þe�aðs�xÞ=� ds:

M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393 1377
Evaluating the above integral exactly and estimating the terms in the resulting
expression gives
jhðkÞðxÞj 6 Cð1þ ��ðkþ1Þe�að1�xÞ=�Þ: ð4:48Þ
Since
ðUjþ1ÞðkÞp ð0Þ ¼ �Z 1
0
hkðsÞds;
Using Eq. (4.48) in the above expression and followed by a simplification gives
jðUjþ1ÞðkÞp ð0Þj 6Z 1
0
jhkðsÞjds;6 CZ 1
0
ð1þ ��ðkþ1Þe�að1�sÞ=�Þds;
¼ C 1þ ��k
að1� e�a=�Þ
� �;
6 C 1þ ��k
a
� �; since ð1� e�a=�Þ 6 1;
Since � 6 1, this implies that ��k P 1, 1 6 k 6 3, using this fact in the aboveexpression we have
jðUjþ1ÞðkÞp ð0Þj 6 C��k; jðUjþ1ÞðkÞp ð1Þj ¼ 0: ð4:49Þ
Differentiating Eq. (4.47) we have
jU ðkþ1Þjþ1 j 6 jhðkÞj þ jU ðkÞ
jþ1ð0Þj þ jðUjþ1ÞðkÞp ð0Þj þ jU ðkÞjþ1ð1Þj
� �jhxj: ð4:50Þ
Using the estimates of Eq. (4.49) yields
jU ðkþ1Þjþ1 j 6 Cð1þ ��ðkþ1Þe�að1�xÞ=�Þ: ð4:51Þ
5. The spatial discretization
5.1. Shishkin mesh
Shishkin meshes are piecewise-uniform meshes which condense approxi-
mately in the boundary layer regions as � ! 0; this is accomplished by the
use of transition parameter s, which depend naturally on �, crucially on N.
Thus for a given N and �, the interval [0,1], is divided into parts, [0,1 � s],[1 � s, 1] where the transition point s is given by
s � min1
2;C� logN
�the value of the constant C depends on which scheme is used.

1378 M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393
Define
hi ¼2ð1�sÞ
N ; if i ¼ 1; 2; . . . ; N2;
2sN ; if i ¼ N
2þ 1; . . . ;N :
8<: ð5:52Þ
where N is the no discretization points and the set of mesh points XN ¼ fxigNi¼0
with
xi ¼2ð1� sÞN�1i; if i ¼ 0; 2; . . . ; N
2;
1� s þ 2sN�1ði� N2Þ if i ¼ N
2þ 1; . . . ;N :
(ð5:53Þ
Define
D�x U i;j ¼
Ui;j � Ui�1;j
hi;
d2xUi;j ¼
1
hi
U iþ1;j � Ui;j
hiþ1
� Ui;j � Ui�1;j
hi
� �;
�hi ¼ ðhi þ hiþ1Þ=2:Discretizing Eq. (4.15) by using standard upwind finite difference operator on
the piecewise uniform mesh XN ¼ fxigNi¼0 with xN = 1, we get
Ui;0 ¼ f ðxiÞ; xi 2 XN ; ð5:54aÞ
��d2xU i;jþ1 þ bðnÞi D�
x U i;jþ1 þ aðnÞi U i;jþ1 ¼ F ðnÞðxiÞ; xi 2 XN ð5:54bÞwith boundary conditions
U 0;jþ1 ¼ 0; UN ;jþ1 ¼ 0: ð5:54cÞThe finite difference operator in Eq. (5.54) defined by
LN� � ��d2
x þ bðnÞi D�x þ aðnÞi I : ð5:55Þ
5.2. Discrete maximum principle
Assume that the mesh function wi satisfies w0 P 0 and wN P 0. Then
LN� wi P 0 for 1 6 i 6 N � 1 implies that wi P 0 for all 0 6 i 6 N.
Proof. Let there exits an integer k such that wk = miniwi and suppose wk < 0.We have w0 P 0 and, wN P 0 therefore k 62 {0,N}.
Now we have
wkþ1 � wk P 0; wk � wk�1 < 0:

M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393 1379
Therefore
LN� wk ¼ ��d2
xðwkÞ þ bðnÞðxkÞD�x wk þ aðnÞðxkÞwk
¼ � ��hk
wkþ1 � wk
hkþ1
� wk � wk�1
hk
� �þ bðnÞðxkÞ
wk � wk�1
hk
� �þ aðnÞðxkÞwk
< 0;
which contradicts the hypothesis, thus we have
wi P 0 for all 0 6 i 6 N : �
6. Error estimates and convergence analysis
To derive �-uniform error estimates, we need sharper bounds on the deriv-
atives of the solution U. We derive these using the following decomposition of
the solution into smooth and singular components
Ujþ1ðxÞ ¼ V jþ1ðxÞ þ W jþ1ðxÞ;where Vj+1 can be written in the form
V jþ1 ¼ V 0 þ �V 1 þ �2V 2
and V0,V1 and V2 are defined, respectively, to be the solutions of the problems
bðnÞðxÞV 0 þ aðnÞðxÞðV 0Þx ¼ F ðnÞðxÞ; V 0ð0Þ ¼ Ujþ1ð0Þ; ð6:56Þ
bðnÞðxÞV 1 þ aðnÞðxÞðV 1Þx ¼ �ðV 0Þxx; V 1ð0Þ ¼ 0; ð6:57Þ
��ðV 2Þxx þ bðnÞðxÞV 2 þ aðnÞðxÞðV 2Þx ¼ �ðV 1Þxx; V 2ð0Þ ¼ 0; V 2ð1Þ ¼ 0:
ð6:58Þthus the smooth component Vj+1 is the solution of
L�V jþ1 ¼ F ðnÞðxÞ; V jþ1ð0Þ ¼ V 0ð0Þ þ �V 1ð0Þ; V jþ1ð1Þ ¼ Ujþ1ð1Þð6:59Þ
and consequently the singular component Wj+1 is the solution of the homoge-
neous problem
L�W jþ1 ¼ 0; W jþ1ð0Þ ¼ 0; W jþ1ð1Þ ¼ Ujþ1ð1Þ � V jþ1ð1Þ: ð6:60Þ
Lemma 3. The bounds of Vj+1,Wj+1 and their derivatives are given as follows:
kV ðkÞjþ1k 6 Cð1þ �ð2�kÞÞ; k ¼ 0; 1; 2; 3; ð6:61aÞ
kW jþ1ðxÞk 6 Ce�að1�xÞ=� for all x 2 X; ð6:61bÞ

1380 M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393
kW ðkÞjþ1ðxÞk ¼ C��k; k ¼ 1; 2; 3; ð6:61cÞ
where kÆk denotes the maximum norm taken over the appropriate domain of the
independent variable, given by
kf k ¼ maxx2X
jf ðxÞj:
Proof. Since V0 is the solution of the reduced problem which is the first order
linear differential Eq. (6.56), with bounded coefficients i.e. b(n)(x), a(n)(x) and
F(n)(x), therefore V0 is the bounded and the bound is independent of the �.Using the bounds of V0, a(n) and F(n) in Eq. (6.56) we get (V0)x is bounded
and independent of �.Differentiating Eq. (6.56) w.r.t. x we get the second order differential
equation, by using the bounds of V0, (V0)x, bðnÞx ; aðnÞx and F ðnÞ
x we get the
estimate for (V0)xx.
Similarly twice differentiating of Eq. (6.56) gives the third order differential
equation, by using the bounds of V0, (V0)x and (V0)xx we get the estimate for
(V0)xxx.
Thus we have
V ðkÞ0 6 C1; k ¼ 0; 1; 2; 3; ð6:62Þ
where C1 is a positive constant independent on the �.In the same fashion we get the bounds on V1 and its derivatives V ðkÞ
1 for
k = 1,2,3. Thus we have
V ðkÞ1 6 C2; k ¼ 0; 1; 2; 3; ð6:63Þ
where C2 is the positive constant independent on the �.Since V2 is the solution of Eq. (6.58), which is similar to Eq. (4.15) therefore
the estimates for the bounds on V2 and its derivatives are given by
V ðkÞ2 6 C3�
�ke�að1�xÞ=�; k ¼ 0; 1; 2; 3; ð6:64Þwhere C3 is positive constant independent on �.
V ðkÞjþ1 ¼ V ðkÞ
0 þ V ðkÞ1 þ V ðkÞ
2 ð6:65Þ
with the help of Eqs. (6.62), (6.63) and (6.64) the above equation can be written
as
V ðkÞjþ1 6 Cð1þ ��ke�að1�xÞ=�Þ; k ¼ 0; 1; 2; 3: ð6:66Þ
To obtain the required bounds on Wj+1 and its derivatives, we consider the bar-
rier functions defined as
w�ðxÞ ¼ Ce�að1�xÞ=� � W jþ1ðxÞ: ð6:67Þ

M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393 1381
Now we have
w�ð0Þ ¼ Ce�a=� � W jþ1ð0Þ;¼ Ce�a=�; since W jþ1ð0Þ ¼ 0;P 0;
w�ð1Þ ¼ C � W jþ1ð1Þ: ð6:68ÞWe can choose the value C such that
w�ð1Þ ¼ C � W jþ1ð1Þ P 0; ð6:69Þ
L�w�ðxÞ ¼ ��w�
xxðxÞ þ bðnÞðxÞw�x ðxÞ þ aðnÞðxÞw�ðxÞ;
¼ � a2
�e�að1�xÞ=� þ bðnÞðxÞ a
�e�að1�xÞ=� þ aðnÞðxÞe�að1�xÞ=�;
¼ a�½�a þ bðnÞðxÞ�e�að1�xÞ=� þ aðnÞðxÞe�að1�xÞ=�; ð6:70Þ
since a is the minimum of b(n)(x), therefore
�a þ bðnÞðxÞ P 0
and a(n)(x) is non-negative, thus we have
L�w�ðxÞ P 0:
Since L� satisfies the maximum principle and we have shown that L�w±(x) P 0,
therefore
w�ðxÞ ¼ Ce�að1�xÞ=� � W jþ1ðxÞ P 0 for all x 2 X
or
kW jþ1ðxÞk 6 Ce�að1�xÞ=� for all x 2 XZ x
0
ðbðW jþ1ÞxÞðsÞds���� ���� ¼ ðbðnÞx W jþ1Þx0 �
Z x
0
ðbðnÞx ðW jþ1ÞxÞðsÞds���� ����;
¼ bðnÞx W jþ1ðxÞ �Z x
0
ðbðnÞx ðW jþ1ÞxÞðsÞds���� ����
6 Ce�að1�xÞ=�: ð6:71Þ
By mean-value theorem in the interval (0, �) there exist z 2 (0,�) such that
jW jþ1ðzÞj ¼W jþ1ð�Þ � W jþ1ð0Þ
�
���� ����;¼ W jþ1ð�Þ
�
���� ����6 C��1e�að1��Þ=�
6 C��1: ð6:72Þ

1382 M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393
Integrating Eq. (6.60) w.r.t. x from 0 to x we have
� �ðW jþ1ÞxðxÞ þ �ðW jþ1Þxð0Þ þZ x
0
bðnÞðW jþ1ÞxðsÞds
þZ x
0
aðnÞW jþ1ðsÞds ¼ 0; ð6:73Þ
the above equation gives
j�ðW jþ1Þxð0Þj ¼ �ðW jþ1ÞxðzÞ �Z z
0
bðnÞðW jþ1ÞxðsÞds�Z z
0
aðnÞW jþ1ðsÞds���� ����;
ð6:74Þmaking use of Eqs. (6.71) and (6.72) we have
j�ðW jþ1Þxð0Þj 6 Ce�að1��Þ=�6 C: ð6:75Þ
Now Eq. (6.73) gives the following estimate with the help of the estimates give
by (6.71) and (6.75)
jðW jþ1ðxÞÞxj 6 C��1; x 2 X: ð6:76Þusing the above estimate in Eq. (6.60) we get the estimate for (Wj+1(x))xx i.e.
jðW jþ1Þxxj 6 C��2: ð6:77ÞSimilarly by differentiating Eq. (6.60) w.r.t. x and using the estimates given byEqs. (6.76) and (6.77) we get the estimate for (Wj+1)xxx. Thus we have
jW ðkÞjþ1j 6 C��k for k ¼ 1; 2; 3: � ð6:78Þ
Theorem 3. Let Uj+1(xi) be the solution of Eq. (4.15) and Ui, j+1 is the solution of
the discrete problem (5.54) at the point xi, at the (j + 1)th time label, there is a
constant C such that
kUi;jþ1 � Ujþ1ðxiÞkh 6 CN�1ðlogNÞ2 for i ¼ 1; 2; . . . ;N ;
where k Æ kh denotes the discrete maximum norm.
Proof. The solution Ui, j+1 of the discrete problem (5.54) at the ith point on the
(j + 1)th time level is decomposed as follows:
Ui;jþ1 ¼ V i;jþ1 þ W i;jþ1;
where Vi, j+1 is the solution of the in non-homogeneous problem,
LN� V i;jþ1 ¼ F ðnÞ; 1 6 i 6 N � 1;
V 0;jþ1 ¼ V jþ1ð0Þ; V N ;jþ1 ¼ V jþ1ð1Þð6:79Þ

M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393 1383
and Wi, j+1 is the solution of the homogeneous problem
LN� W i;jþ1 ¼ 0; 1 6 i 6 N � 1;
W 0;jþ1 ¼ W jþ1ð0Þ; W N ;jþ1 ¼ W jþ1ð1Þ:ð6:80Þ
The error estimate can be written in the following form:
Ui;jþ1 � Ujþ1ðxiÞ ¼ ðV i;jþ1 � V jþ1ðxiÞÞ þ ðW i;jþ1 � W jþ1ðxiÞÞ; xi 2 XN:
The error of smooth and singular components can be estimated separately. h
Estimate the error of smooth component as follows:
LN� ðV i;jþ1 � V jþ1ðxiÞÞ ¼ F ðnÞ � LN
� ðV jþ1ðxiÞÞ; xi 2 XN
¼ ðL� � LN� ÞV jþ1ðxiÞ
¼ ��o2
ox2� d2
x
� �V jþ1ðxiÞ þ bðnÞðxiÞ
o
ox�D�
x
� �V jþ1ðxiÞ:
ð6:81Þ
Let xi 2 XN. Then for any function w 2 C2ðXÞ
D�x � o
ox
� �wðxiÞ
���� ���� 6 ðxi � xi�1Þkwð2Þk=2
and for any function w 2 C3ðXÞ
d2x �
o2
ox2
� �wðxiÞ
���� ���� 6 ðxiþ1 � xi�1Þkwð3Þk=3
for the proof of the above results are given in Lemma 4.1 [p. 21], of [10].
Using these results in Eq. (6.81) followed by simplification gives
jLN� ðV i;jþ1 � V jþ1ðxiÞÞj 6 Cðxiþ1 � xi�1Þ �jV ð3Þ
jþ1j þ jV ð2Þjþ1j
� �: ð6:82Þ
Since xi+1 � xi�1 6 2N�1 and using Lemma 3 for the estimates of V ð3Þjþ1 and V ð2Þ
jþ1
then we have
jLN� ðV i;jþ1 � V jþ1ðxiÞÞj 6 CN�1 ð6:83Þ
and using Lemma 3 [p. 60] of [10] we have
jðV i;jþ1 � V jþ1ðxiÞÞj 6 CN�1: ð6:84Þ
The estimation of the singular component of the error (Wi, j+1 �Wj+1(xi)),depends on the argument whether the value of transition parameter s = 1/2
or s ¼ ðC� logNÞ=a.
Case (i) (C� logN P 1/2, i.e., when the mesh is uniform).
The classical argument used in the estimation of the smooth component of
the error leads to

1384 M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393
jLN� ðW i;jþ1 � W jþ1ðxiÞÞj ¼ Cðxiþ1 � xi�1Þ �jW ð3Þ
jþ1j þ jW ð2Þjþ1j
� �Since (xi+1 � xi�1) 6 2N�1, using Lemma 3 for the estimates of bounds of
W ð3Þjþ1; W ð2Þ
jþ1 lead to
jLN� ðW i;jþ1 � W jþ1ðxiÞÞj 6 C��2N�1:
In this case ��16 2C logN . Using the above inequality we obtained
jLN� ðW i;jþ1 � W jþ1ðxiÞÞj 6 CN�1ðlogNÞ2:
Using the Lemma 3 [p. 60] of [10] we get
jðW i;jþ1 � W jþ1ðxiÞÞj 6 CN�1ðlogNÞ2:
Case (ii) (C� logN < 1/2, i.e., when the mesh is piecewise uniform with the
mesh spacing 2(1 � s)/N in the subinterval [0,1 � s). and 2s/N in the subinter-
val [1 � s, 1]). Since by the Lemma 3 we have
jW jþ1ðxiÞj 6 Ce�að1�xiÞ=�; 1 6 i 6 N=2
Since exp{�a(1 � x)} is a increasing function for x in [0,1 � s]. Using this fact
in the above inequality we have
jW jþ1ðxiÞj 6 jW jþ1ð1� sÞ; 1 6 i 6 N=2
But in this case we have s = Ce logN. Using this value of s in the above inequal-
ity we get
jW jþ1ðxiÞj 6 CN�1; xi; 1 6 i 6 N=2 ð6:85ÞTo establish the similar bound on Wi, j+1, we construct a mesh function bW i;jþ1
with the help of Lemma 5 [p. 53] of [10] we get
jW i;jþ1j 6 j bW i;jþ1j; 0 6 i 6 N : ð6:86Þwhere bW i;jþ1 is the solution of the difference equation
��d2xbW i;jþ1 þ aD�
xbW i;jþ1 þ aðnÞðxiÞ bW i;jþ1 ¼ F ðnÞðxiÞ: ð6:87Þ
By Lemma 3 [p. 51] of [10] we have
j bW i;jþ1j 6 CN�1; 0 6 i 6 N=2: ð6:88Þ
Combining the inequalities (6.86) and (6.88) we have
jW i;jþ1j 6 CN�1; 0 6 i 6 N=2: ð6:89Þ
Using the inequalities (6.85) and (6.89) we get
jðW i;jþ1 � W jþ1ðxiÞÞj 6 CN�1; 0 6 i 6 N=2: ð6:90Þ

M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393 1385
In the second subinterval [1 � s, 1], using the classical argument yields the fol-
lowing estimate of local truncation error for N/2 + 1 6 i 6 N � 1:
jLN� ðW i;jþ1 � W i;jþ1ðxiÞÞj 6 C��2jðxiþ1 � xi�1Þj: ð6:91Þ
Since (xi+1 � xi�1) = 4s/N, using this fact in the above inequality we get
jLN� ðW i;jþ1 � W jþ1ðxiÞÞj 6 4C��2sN�1: ð6:92Þ
Also we have
jW N ;jþ1 � W jþ1ð1Þj ¼ 0; ð6:93Þ
jW N=2;jþ1 � W jþ1ðxN=2Þj 6 jW N=2;jþ1j þ jW jþ1ðxN=2Þj ð6:94Þ
Using inequalities (6.85) and (6.89)in the above inequality we get
jW N=2;jþ1 � W jþ1ðxN=2Þj 6 CN�1: ð6:95Þ
Now introducing the barrier function
Ui ¼ ðxi � ð1� sÞÞC1��2sN�1 þ C2N�1;
N26 i 6 N :
For the suitable choice of C1 and C2, the mesh functions
w�i ¼ Ui � ðW i;jþ1 � W jþ1ðxiÞÞ;
N26 i 6 N : ð6:96Þ
UN=2 ¼ ðxN=2 � ð1� sÞÞC1��2sN�1 þ C2N�1 ¼ C2N�1; since xN=2 ¼ 1� s
ð6:97Þ
w�N=2 ¼ UN=2 � ðW N=2;jþ1 � W jþ1ðxN=2ÞÞ
P C2N�1 � ð�CN�1Þ using ð6:97Þ and ð6:95Þ;
¼ ðC2 � CÞN�1; choose C2 P C
P C3N�1;C3 ¼ ðC2 � CÞ a positive constant
P 0
w�N ¼ UN � ðW N ;jþ1 � W jþ1ðxN ÞÞ; ð6:98Þ
where
UN ¼ ðxN ð1� sÞÞC1��2sN�1 þ C2N�1
¼ C1��2s2N�1 þ C2N�1; since xN ¼ 1
P 0
ð6:99Þ

1386 M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393
using the inequalities (6.93) and (6.99), in the inequality (6.98) we have
w�N P 0; ð6:100Þ
LN� w�
i ¼ LN� ðUi � W i;jþ1W jþ1ðxiÞÞ;
N2þ 1 6 i 6 N � 1; by (6.96)
¼ LN� Ui � LN
� ðW i;jþ1 � W jþ1ðxiÞÞP aðxi � sÞC1�
�2sN�1 þ C2N�1 � ð�4C��2sN�1Þ;¼ ðaðxi � sÞC1 � 4CÞ��2sN�1 þ C2N�1
P 0;
ð6:101Þsince xi P s and choose C1 very large such that (a(xi � s)C1 � 4C) P 0. Now
we have
w�N=2 P 0; w�
N P 0;
LN� w�
i P 0; N=2þ 1 6 i 6 N � 1:
Using discrete maximum principle for LN� on the interval [1 � s,1] gives
w�i P 0; N=2 6 i 6 N ð6:102Þ
Using the inequality (6.96)in the above inequality we have
Ui � ðW i;jþ1 � W jþ1ðxiÞÞ P 0;N=2 6 i 6 N ð6:103ÞThe above inequality implies that
jðW i;jþ1 � W jþ1ðxiÞj 6 Ui 6 C1��2s2N�1 þ C2N�1: ð6:104Þ
Since s = C�logN, using this fact in the above inequality, we have
jðW i;jþ1 � W jþ1ðxiÞÞj 6 C1ðlogNÞ2N�1 þ C2N�1
6 ðC1 þ C2ÞðlogNÞ2N�1; logN P 1: ð6:105Þ
Combining the error estimates in the subintervals [0, 1 � s] and [1 � s, 1] asgiven by the inequalities (6.90) and (6.105), we have
jðW i;jþ1 � W jþ1ðxiÞÞj 6 CðlogNÞ2N�1; N=2 6 i 6 N ð6:106Þ
Since
jUi;jþ1 � Ujþ1ðxiÞj 6 jV i;jþ1 � V jþ1ðxiÞj þ jW i;jþ1 � W jþ1ðxiÞj: ð6:107Þ
Using the inequalities (6.84) and (6.106) we get
jðUi;jþ1 � Ujþ1ðxiÞÞj 6 CN�1ðlogNÞ2: ð6:108Þ
M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393 1387
The uniform convergence of the totally discrete scheme is obtained as follows.
Theorem 4. Let U(xi, tj+1) be the solution of the linearized problem (4.33) of Eq.
(2.1), Uj+1(xi) be the solution of the differential Eq. (4.15) and the Ui, j+1 be the
solution of the totally discrete Eq. (5.54). By Theorems 1 and 3, there exist a
constant C such that
kUðxi; tjþ1Þ � Ui;jþ1kh 6 CðDt þ N�1ðlogNÞ2Þ:
Proof. The proof of the above Theorem is just the consequence of the Theo-
rems 1 and 3,
kUðxi; tjþ1Þ � Ui;jþ1kh 6 kUðxi; tjþ1Þ � Ujþ1ðxiÞkh þ kUjþ1ðxiÞ � Ui;jþ1kh
6 C1Dt þ C2N�1ðlogNÞ2 using Theorems 1 and 3
6 CðDt þ N�1ðlogNÞ2Þ where C ¼ maxfC1;C2g:ð6:109Þ
7. Numerical results
In this section to illustrate the performance of the proposed method, we con-
sider the some test examples and compare the computed results with the exact
solution for the considered examples.
Example 1
ut þ uux ¼ uxx; ðx; tÞ 2 ð0; 1Þ � ð0; T � ð7:110aÞwith initial condition
uðx; 0Þ ¼ sinðpxÞ; 0 6 t 6 T ð7:110bÞ
and boundary conditions
uð0; tÞ ¼ 0; uð1; tÞ ¼ 0; 0 6 x 6 1: ð7:110cÞ
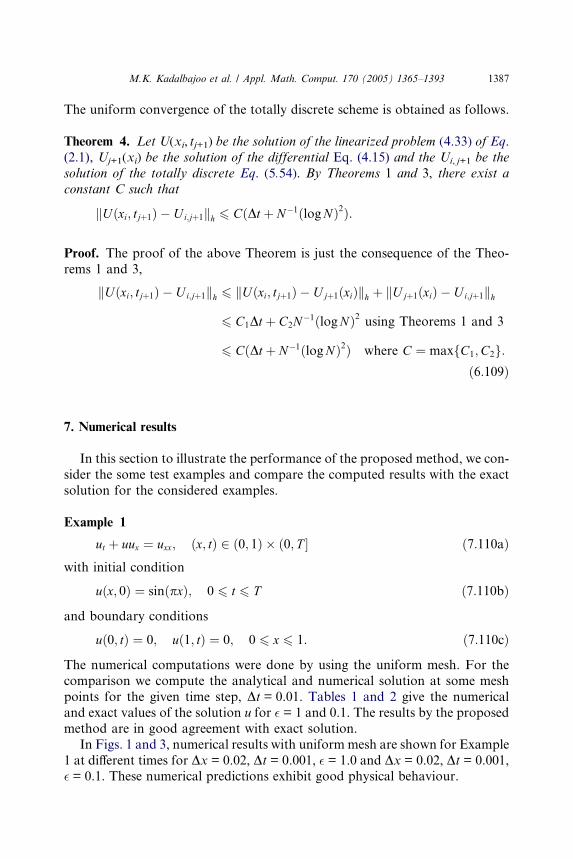
The numerical computations were done by using the uniform mesh. For the
comparison we compute the analytical and numerical solution at some mesh
points for the given time step, Dt = 0.01. Tables 1 and 2 give the numerical
and exact values of the solution u for � = 1 and 0.1. The results by the proposed
method are in good agreement with exact solution.
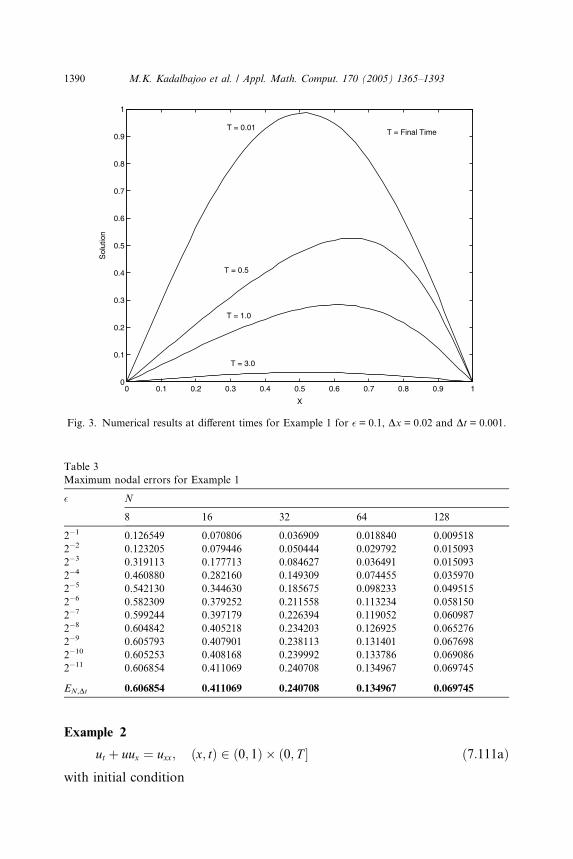
In Figs. 1 and 3, numerical results with uniform mesh are shown for Example
1 at different times for Dx = 0.02, Dt = 0.001, � = 1.0 and Dx = 0.02, Dt = 0.001,� = 0.1. These numerical predictions exhibit good physical behaviour.
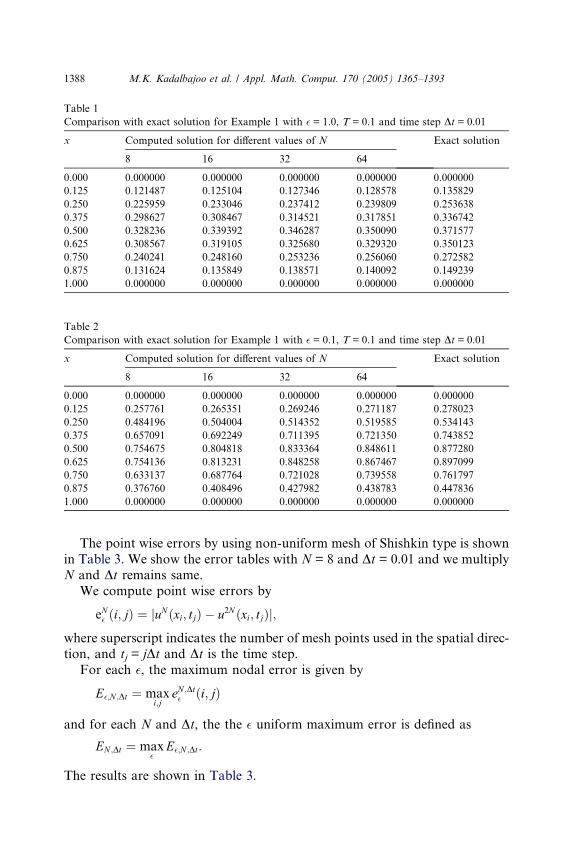
Table 2
Comparison with exact solution for Example 1 with � = 0.1, T = 0.1 and time step Dt = 0.01
x Computed solution for different values of N Exact solution
8 16 32 64
0.000 0.000000 0.000000 0.000000 0.000000 0.000000
0.125 0.257761 0.265351 0.269246 0.271187 0.278023
0.250 0.484196 0.504004 0.514352 0.519585 0.534143
0.375 0.657091 0.692249 0.711395 0.721350 0.743852
0.500 0.754675 0.804818 0.833364 0.848611 0.877280
0.625 0.754136 0.813231 0.848258 0.867467 0.897099
0.750 0.633137 0.687764 0.721028 0.739558 0.761797
0.875 0.376760 0.408496 0.427982 0.438783 0.447836
1.000 0.000000 0.000000 0.000000 0.000000 0.000000
Table 1
Comparison with exact solution for Example 1 with � = 1.0, T = 0.1 and time step Dt = 0.01
x Computed solution for different values of N Exact solution
8 16 32 64
0.000 0.000000 0.000000 0.000000 0.000000 0.000000
0.125 0.121487 0.125104 0.127346 0.128578 0.135829
0.250 0.225959 0.233046 0.237412 0.239809 0.253638
0.375 0.298627 0.308467 0.314521 0.317851 0.336742
0.500 0.328236 0.339392 0.346287 0.350090 0.371577
0.625 0.308567 0.319105 0.325680 0.329320 0.350123
0.750 0.240241 0.248160 0.253236 0.256060 0.272582
0.875 0.131624 0.135849 0.138571 0.140092 0.149239
1.000 0.000000 0.000000 0.000000 0.000000 0.000000
1388 M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393
The point wise errors by using non-uniform mesh of Shishkin type is shown
in Table 3. We show the error tables with N = 8 and Dt = 0.01 and we multiplyN and Dt remains same.
We compute point wise errors by
eN� ði; jÞ ¼ juNðxi; tjÞ � u2N ðxi; tjÞj;where superscript indicates the number of mesh points used in the spatial direc-tion, and tj = jDt and Dt is the time step.
For each �, the maximum nodal error is given by
E�;N ;Dt ¼ maxi;j
eN ;Dt� ði; jÞ
and for each N and Dt, the the � uniform maximum error is defined as
EN ;Dt ¼ max�
E�;N ;Dt:
The results are shown in Table 3.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
X
Sol
utio
n
T = 0.001
T = 0.1
T = 0.2
T = 0.3
T = Final Time
Fig. 1. Numerical results at different times for Example 1 for � = 1.0, Dx = 0.02 and Dt = 0.001.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
X
Sol
utio
n
T = 0.001
T = 0.1
T = 0.2
T = 0.3
T = Final Time
Fig. 2. Numerical results at different times for Example 2 for � = 1.0, Dx = 0.02 and Dt = 0.001.
M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393 1389
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
X
Sol
utio
n
T = 0.01
T = 0.5
T = 1.0
T = 3.0
T = Final Time
Fig. 3. Numerical results at different times for Example 1 for � = 0.1, Dx = 0.02 and Dt = 0.001.
Table 3
Maximum nodal errors for Example 1
� N
8 16 32 64 128
2�1 0.126549 0.070806 0.036909 0.018840 0.009518
2�2 0.123205 0.079446 0.050444 0.029792 0.015093
2�3 0.319113 0.177713 0.084627 0.036491 0.015093
2�4 0.460880 0.282160 0.149309 0.074455 0.035970
2�5 0.542130 0.344630 0.185675 0.098233 0.049515
2�6 0.582309 0.379252 0.211558 0.113234 0.058150
2�7 0.599244 0.397179 0.226394 0.119052 0.060987
2�8 0.604842 0.405218 0.234203 0.126925 0.065276
2�9 0.605793 0.407901 0.238113 0.131401 0.067698
2�10 0.605253 0.408168 0.239992 0.133786 0.069086
2�11 0.606854 0.411069 0.240708 0.134967 0.069745
EN,Dt 0.606854 0.411069 0.240708 0.134967 0.069745
1390 M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393
Example 2
ut þ uux ¼ uxx; ðx; tÞ 2 ð0; 1Þ � ð0; T � ð7:111aÞwith initial condition
M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393 1391
uðx; 0Þ ¼ 4xð1� xÞ; 0 6 x 6 1 ð7:111bÞand boundary conditions
uð0; tÞ ¼ 0; uð1; tÞ ¼ 0; 0 6 t 6 T : ð7:111cÞ
Table 4
Maximum nodal error for Example 2
� N
8 16 32 64 128
2�1 0.068049 0.038832 0.019986 0.010134 0.009518
2�2 0.098964 0.055833 0.032670 0.019375 0.015093
2�3 0.265789 0.142863 0.067190 0.028797 0.016726
2�4 0.410171 0.245469 0.129438 0.064377 0.035970
2�5 0.507933 0.319100 0.173349 0.091323 0.049515
2�6 0.565204 0.369275 0.205817 0.112251 0.058150
2�7 0.608845 0.420887 0.242355 0.140985 0.068855
2�8 0.621333 0.439466 0.261480 0.145203 0.076823
2�9 0.623685 0.444969 0.269322 0.152896 0.082167
2�10 0.622498 0.444803 0.271893 0.157022 0.085812
2�11 0.620764 0.443056 0.271884 0.159089 0.088103
EN,Dt 0.623685 0.444969 0.271893 0.159089 0.088103
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
X
Sol
utio
n
T = 0.01
T = 0.5
T = 1.0
T = 3.0
T = Final Time
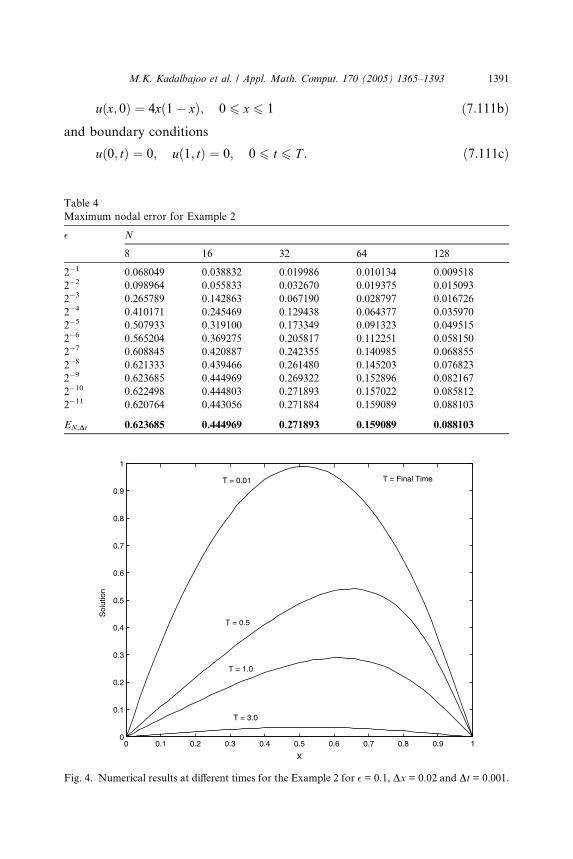
Fig. 4. Numerical results at different times for the Example 2 for � = 0.1, Dx = 0.02 and Dt = 0.001.

1392 M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393
The points wise errors with non-uniform mesh of Shishkin type is given in
Table 4 with various values of � and N.
In Figs. 2 and 4, numerical results with uniform mesh are shown for
Example 2 at different times for Dx = 0.02, Dt = 0.001, � = 1.0 and Dx = 0.02,
Dt = 0.001, � = 0.1. These numerical predictions exhibit good physical
behaviour.
8. Conclusions
In this paper, we propose a numerical scheme for solving time dependent
Burgers� equation for low viscosity coefficient, i.e. for high Reynold�s number.
The Burgers� equation is a non-linear parabolic partial differential equation. To
tackle the non-linearity, quasilinearization is used. The sequence of solutions ofthe linear equations obtained after applying quasilinearization is shown to con-
verge quadratically to the solution of the original non-linear problem. An
extensive amount of analysis has been carried out to establish the parameter
uniform error estimates for time as well as spatial discretization.
In support of predicted theory some test examples are solved using the pre-
sented method. The computed solution is compared with exact solution for
high viscosity coefficient. Since for low viscosity coefficient or high Reynold�snumber, the exact solution of the Burgers� equation [16] is not available, soto illustrate the performance of the proposed method for low viscosity coeffi-
cient, the maximum error is calculated in Tables 3 and 4 using half mesh prin-
ciple. The error Tables 3 and 4 show that the method converges independently
of perturbation parameter. The solution is also plotted with uniform meshes
for � = 1.0 and � = 0.1 in Figs. 1–4.
References
[1] H. Batman, some recent researches on the motion of fluids, Mon. Weather Rev. 43 (1915) 163–
170.
[2] J.M. Burgers, A mathematical model illustrating the theory of turbulenceAdvances in Applied
Mechanics, 1, Academic Press, New York, 1948, pp. 171–199.
[3] E.R. Benton, G.W. Platzman, A table of solutions of the one-dimensional Burgers equation,
Quart. Appl. Math. 30 (1972) 195–212.
[4] R.E. Bellman, R.E. Kalaba, Quasilinearization and Nonlinear Boundary-value Problems,
American Elsevier Publishing Company, Inc., New York, 1965.
[5] L. Bobisud, Second-order linear parabolic equation with a small parameter, Arch. Ration.
Mech. Anal. 27 (1967) 385–397.
[6] J.D. Cole, On a quasilinear parabolic equation occurring in aerodynamics, Quart. Appl. Math.
9 (1951) 225–236.
[7] D.J. Evans, A.R. Abdullah, The group explicit method for the solution of Burgers equation,
computing 32 (1984) 239–253.
M.K. Kadalbajoo et al. / Appl. Math. Comput. 170 (2005) 1365–1393 1393
[8] E. Hopf, The partial differential equation ut + uux = muxx, Commun. Pure Appl. Math. 3 (1950)
201–230.
[9] S. Kutluay, A.R. Bahadir, A. Ozdes, Numerical solution of one-dimensional Burgers
equation: explicit and exact explicit finite difference methods, J. Comput. Appl. Math. 103
(1999) 251–261.
[10] J.J.H. Miller, E. O�Riordan, G.I. Shishkin, Fitted Numerical Methods for Singular
Perturbation Problems, World Scientific, Singapore, 1996.
[11] R.C. Mittal, P. Singhal, Numerical solution of Burgers equation, Commun. Numer. Methods
Eng. 9 (1993) 397–406.
[12] A. Mazzia, F. Mazzia, Higher order transverse schemes for the numerical solution of partial
differential equations, J. Comput. Appl Math. 82 (1997).
[13] T. Ozis, A. Ozdes, A direct variational methods applied to Burgers equation, J. Comput. Appl.
Math. 71 (1996) 163–175.
[14] T. Ozis, E.N. Aksan, A. Ozdes, A finite element approach for solution of Burgers� equation,Appl. Math. Comput. 139 (2003) 417–428.
[15] M.H. Protter, H.F. Weinberger, Maximum Principles in Differential Equations, Prentice Hall,
Inc., 1967.
[16] D.S. Zang, G.W. Wei, D.J. Kouri, D.K. Hoffman, Burgers� equation with high Reynolds
number, Phys. Fluids 9 (1997) 1853–1855.