a multi-objective constraint-handling method with pso algorithm for constrained engineering...
TRANSCRIPT

A Multi-Objective Constraint-Handling Method with PSO Algorithm for Constrained Engineering Optimization Problems
Lily D LI1, Xiaodong Li2, Xinghuo Yu2
-----------------------------------------------------------------------------------------------------------------
1 Central Queensland University, Australia2 RMIT University, Australia
1IEEE Congress on Evolutionary Computation 2008

OutlineBackgroundProblem formulationThe proposed approach
PSO algorithmConstraint handling
SimulationResultsConclusion
2IEEE Congress on Evolutionary Computation 2008

BackgroundReal world optimization problems are constrainedConstraint-Handling is a key issueEvolutionary algorithms for optimization
successful in unconstrained optimization problemsconstraint-handling remain problematic because their original versions have no mechanism to incorporate constraints into fitness functions
3IEEE Congress on Evolutionary Computation 2008

Background (cont.)Constraint-Handling via Genetic Algorithm has been studied Constraint-Handling via Particle Swarm Optimization Algorithm has few attempts
4IEEE Congress on Evolutionary Computation 2008

Problem formulationConstrained single objective optimization problem
where X=[x1,x2,…xn] , with each xi (i=1,2,…n) is bounded by lower and upper limits Li ≤ xi ≤ Ui
m is the total number of constraints
minimize ( ) (1)
subject to ( ) 0, 1,2,.... .i
fg i m
⎫⎬≤ = ⎭
XX
5IEEE Congress on Evolutionary Computation 2008
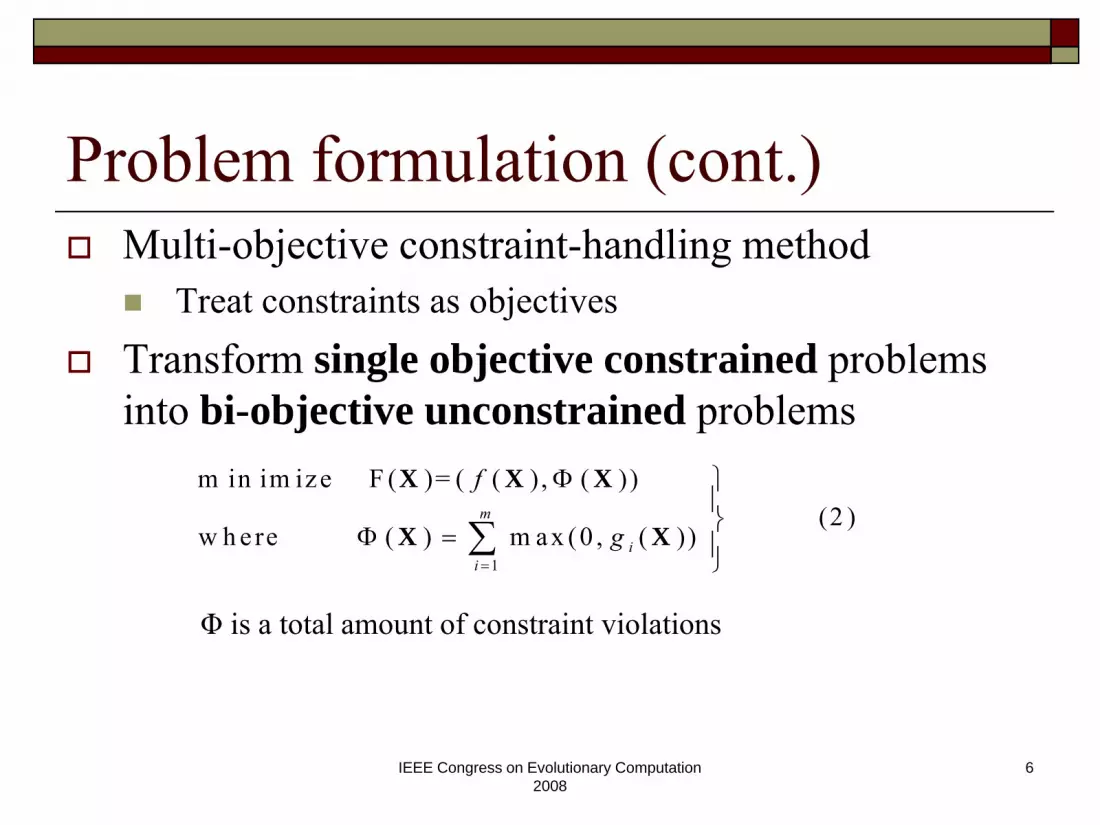
Problem formulation (cont.)Multi-objective constraint-handling method
Treat constraints as objectives
Transform single objective constrained problems into bi-objective unconstrained problems
Φ is a total amount of constraint violations
1
m in im ize F ( )= ( ( ), ( )) (2 )
w h ere ( ) m ax (0 , ( )) m
ii
f
g=
Φ ⎫⎪⎬Φ = ⎪⎭
∑
X X X
X X
6IEEE Congress on Evolutionary Computation 2008

Problem formulation (cont.)A general Multi-objective Optimization (MOO) problem
Find Pareto-frontApply high-level information to find the final solution
For this problem in Equation (2)Constraints satisfaction (Φ = 0 or Φ ≤ ε) is a must Can be used as high-level information
7IEEE Congress on Evolutionary Computation 2008
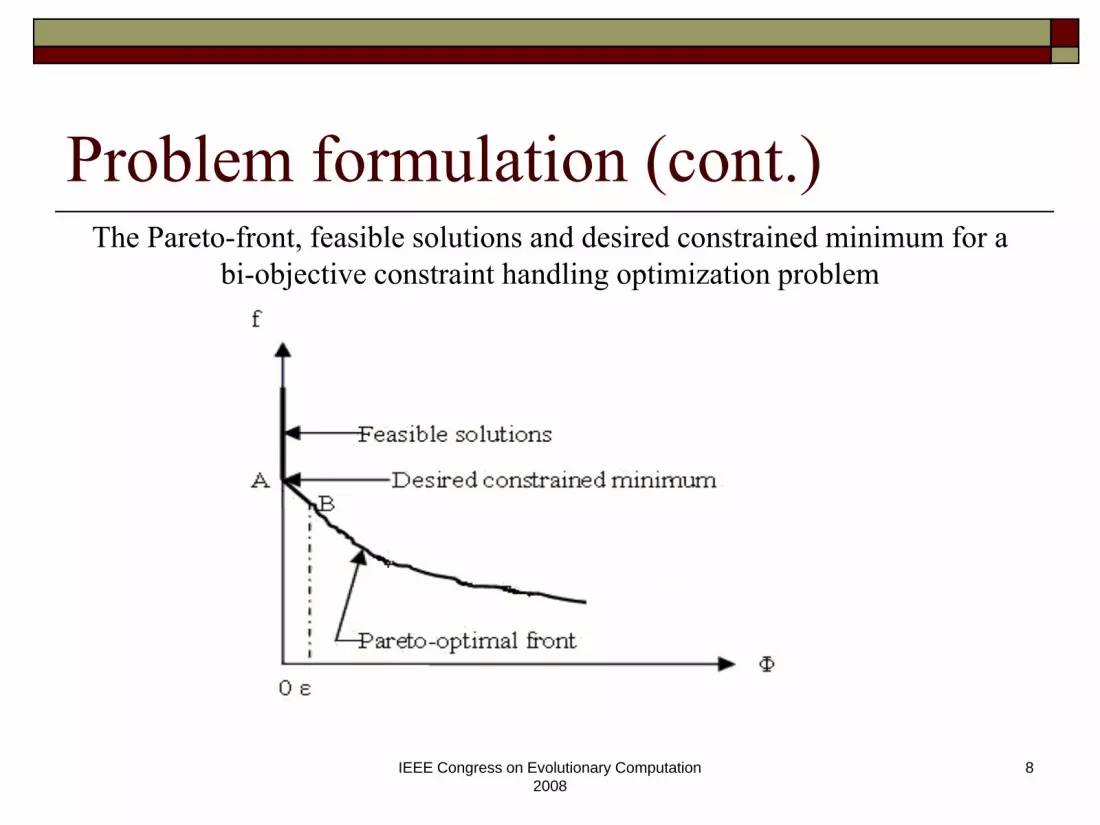
Problem formulation (cont.)The Pareto-front, feasible solutions and desired constrained minimum for a
bi-objective constraint handling optimization problem
8IEEE Congress on Evolutionary Computation 2008

Problem formulation (cont.)If a predefined target is givenThe problem can be transferred into
t: predefined targetε: minimum error allowed to constraintsΔ: minimum error allowed to target
minimize F(X)=( ( ) - , (X)) (3)
goal (X) and ( ) - f t
f tεΦ ⎫
⎬Φ ≤ ≤Δ ⎭
XX
9IEEE Congress on Evolutionary Computation 2008

Problem formulation (cont.)The solutions area for a bi-objective constraint handling optimization problem
10IEEE Congress on Evolutionary Computation 2008

Proposed approachIntegrate Multi-objective constraint-handling method into PSO algorithmAdopt domination concept from Multi-objective optimization in deciding particles behaviours
11IEEE Congress on Evolutionary Computation 2008

PSO algorithmstochastic methodmetaphor of social behaviour of flocks of birds and schools of fishlink to evolutionary computationno “survival of the fittest”
IEEE Congress on Evolutionary Computation 2008
12

PSO algorithmFormula
(a)
(b)
vidt+1: velocity for particle i, dimension d, generation t+1
xidt+1: position for particle i, dimension d, generation t+1
13IEEE Congress on Evolutionary Computation 2008
1 1
2 2
( 1 ) ( ) ( ) ( ) ( )
( ) ( ) ( )
( 1 ) ( 1 )m a x m a x
( 1 ) ( 1 )m a x m a x
[ + ( )
+ ( ) ]
,
,
i d i d i d i d i d
i d i d i d
i d i d
i d i d
t t t t t
t t t
t t
t t
v w v c r p B e s t x
c r l B e s t x
v V i f v V
v V i f v V
χ+
+ +
+ +
⎫= −⎪
− ⎪⎪⎬
= > ⎪⎪= − < − ⎪⎭
( 1) ( ) ( 1)id id id
t t tx x v+ += +

Constraint HandlingMulti-objective Constraint HandlingAdopt domination conceptDefinition: A solution X(1) is said to dominate the other solution X(2), if both conditions 1 and 2 are true:
The solution X(1) is no worse than X(2) in all objectives, (for all j =1,2,…,m).The solution X(1) is strictly better than X(2) in at least one objective, for at least
one
Second objective Φ has high priorityFinal results must be selected from Φ = 0 or Φ ≤ ε
14IEEE Congress on Evolutionary Computation 2008
{1, 2 , ..., }j m∈

Selection rules and Diversity ControlSelection rules
Non-dominated particles are better than dominated onesParticles with lower Φ is better than those with higher Φ (means closer to the feasible area)
Perturbationminor probability pdisturb few particles by regenerating
15IEEE Congress on Evolutionary Computation 2008

Modified PSO algorithm
16IEEE Congress on Evolutionary Computation 2008
1. GlobalF = POSITIVE_INFINITY; 2. P0 = URand (Li, Ui)3. V0 = 04. F0 = Fitness_F (P0)5. Φ0 = Fitness_Φ(P0)6. pBest0 = P07. For i = 0 To n 8. lBesti = LocalBest (Pi-1, Pi, Pi+1) (Selection rules)9. End for10. Do 11. For i = 0 To n12. Vi+1 = Speed ( Pi,,Vi, pBesti, lBesti) (Equation (a)) 13. Pi+1 = Pi+ Vi+1 (Equation (b)) 14. r = URand (0,1)15. If (r ≤ p) 16. TempPi+1 = Rand (Li, Ui)

Modified PSO algorithm (cont.)
17IEEE Congress on Evolutionary Computation 2008
17. If (TempPi+1 isBetterThan Pi+1) (Selection rules)18. Pi+1 = TempPi+119. Fi+1 = Fitness_F(Pi+1)20. Φi+1 = Fitness_Φ(Pi+1)21. If (Pi+1 isBetterThan pBesti ) (Selection rules)22. pBesti = Pi+123. If (Φi+1 ≤ ε)24. If (Fi+1 < GlobalF) 25. GlobalF = Fi+126. End For27. For i = 0 To n28. lBesti = LocalBest (Pi-1, Pi, Pi+1) (Selection rules)29. End for30. If (GlobalF ≤ Δ ) 31. Output GlobalF and Pi+132. Stop33. End Do

Features of the modified PSO algorithm
Whenever calculating fitness, both objectivesF=f(X)-t and Φ need to be evaluated;
If a particle’s new location is better than its best past location, the pBest is updated (decided by selection rules);
IEEE Congress on Evolutionary Computation 2008
18

Features of the modified PSO algorithm (cont.)
A particle’s best neighboring particle is determined by the two steps:
Find all the non-dominated particles in the neighborhood; If there is only one non-dominated particle in the neighborhood, select it as lBest; otherwise, select one with the lowest Φ as lBest (the lower Φ means closer to the feasible region).
IEEE Congress on Evolutionary Computation 2008
19

Features of the modified PSO algorithm (cont.)
A minor perturbation with the probability of p is introduced after the calculating the next particle position. If perturbed particle is better than the particle before perturbation, replace the particle with the perturbed one.After each iteration, check whether the goal is obtained; if obtained, the iteration ends.
IEEE Congress on Evolutionary Computation 2008
20

SimulationThree well-known engineering design problems
E01: Welded beam design problem(This problem has little difference from the original one proposed by Reklaitis et al in 1983 which has 5 constraints. For some reason, many researchers have studied the one has 7 constraints, we include this version for comparison purpose)
E02: Pressure vessel design problemE03: Spring design problem
21IEEE Congress on Evolutionary Computation 2008

E01: Welded beam design problem
IEEE Congress on Evolutionary Computation 2008
22
Minimize2
1 2 3 4 2( ) 1.10471 0.04811 (14.0 )f X x x x x x= + +
Subject to
1 max
2 max
3 1 42
4 1 3 4 2
5 1
6 max
7
( ) ( ) 0( ) ( ) 0( ) 0
( ) 0.10471 0.04811 (14 ) 5 0( ) 0.125 0( ) ( ) 0( ) ( ) 0c
g X Xg X Xg X x x
g X x x x xg X xg X Xg X P P X
τ τσ σ
δ δ
= − ≤
= − ≤= − ≤
= + + − ≤
= − ≤
= − ≤= − ≤

E02: Pressure vessel design problem
IEEE Congress on Evolutionary Computation 2008
23
Minimize 2 2 21 3 4 2 3 1 4 1 3( ) 0.6224 1.7781 3.1661 19.84f X x x x x x x x x x= + + +
Subject to 1 3 1
2 3 2
2 33 3 4 3
4 4
( ) 0.0193 0( ) 0.00954 0
4( ) 1296000 03
( ) 240 0
g X x xg X x x
g X x x x
g X x
π π
= − ≤= − ≤
= − − ≤
= − ≤

E03: Spring design problem
IEEE Congress on Evolutionary Computation 2008
24
Minimize 23 2 1( ) ( 2)f X x x x= +
Subject to3
2 31 4
12
2 1 22 3 4 2
2 1 1 1
13 2
2 3
2 14
( ) 1 071785
4 1( ) 1 012566( ) 5108
140.45( ) 1 0
( ) 1 01.5
x xg Xx
x x xg Xx x x x
xg Xx x
x xg X
= − ≤
−= + − ≤
−
= − ≤
+= − ≤

ParametersNeighbourhood topology: ring (circular)w = 0 (Empirically derived)c1=c2=2χ=0.63 Vmax= 0.5*(decision variable range)p = 0.1% number of particles is 100the maximum iteration is set to 10,000ε = 1.0E-9Δ = 1.0E-04 (E01 and E03), 1.0E-01 (E02), because E02 has large magnitude than E01 and E03.30 independent runs
25IEEE Congress on Evolutionary Computation 2008
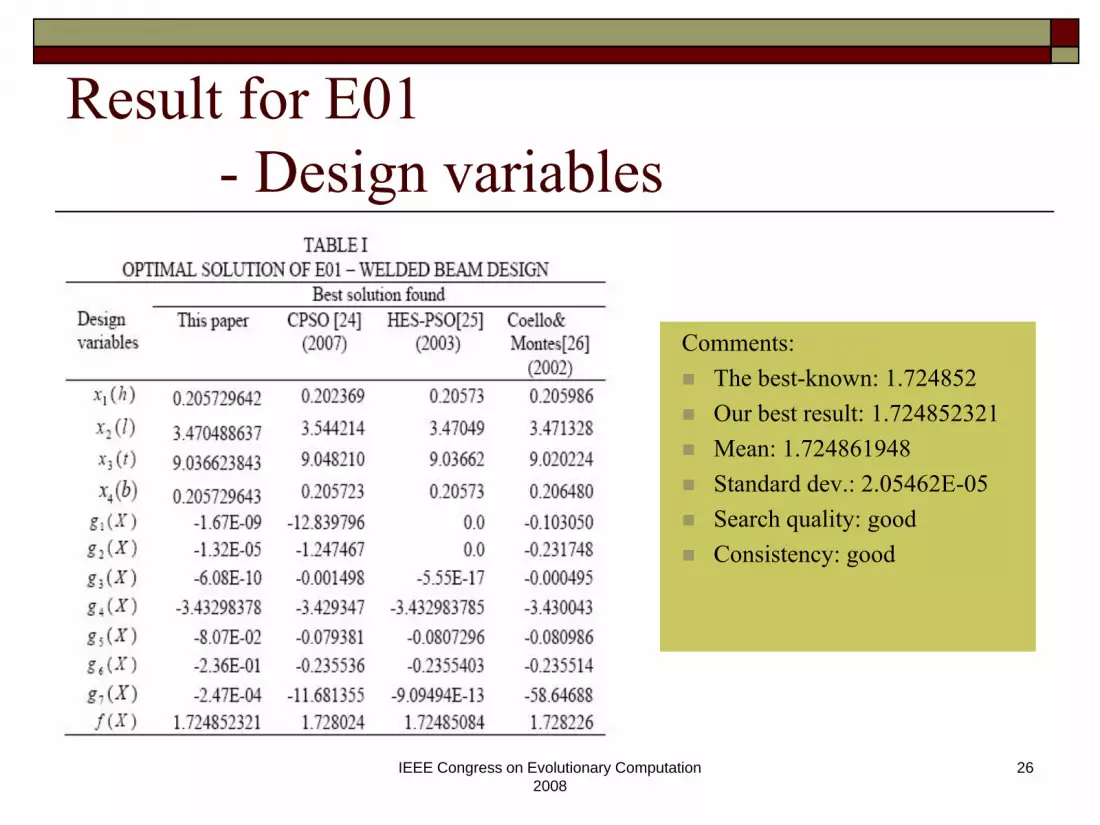
Result for E01- Design variables
Comments:The best-known: 1.724852Our best result: 1.724852321Mean: 1.724861948Standard dev.: 2.05462E-05Search quality: goodConsistency: good
IEEE Congress on Evolutionary Computation 2008
26
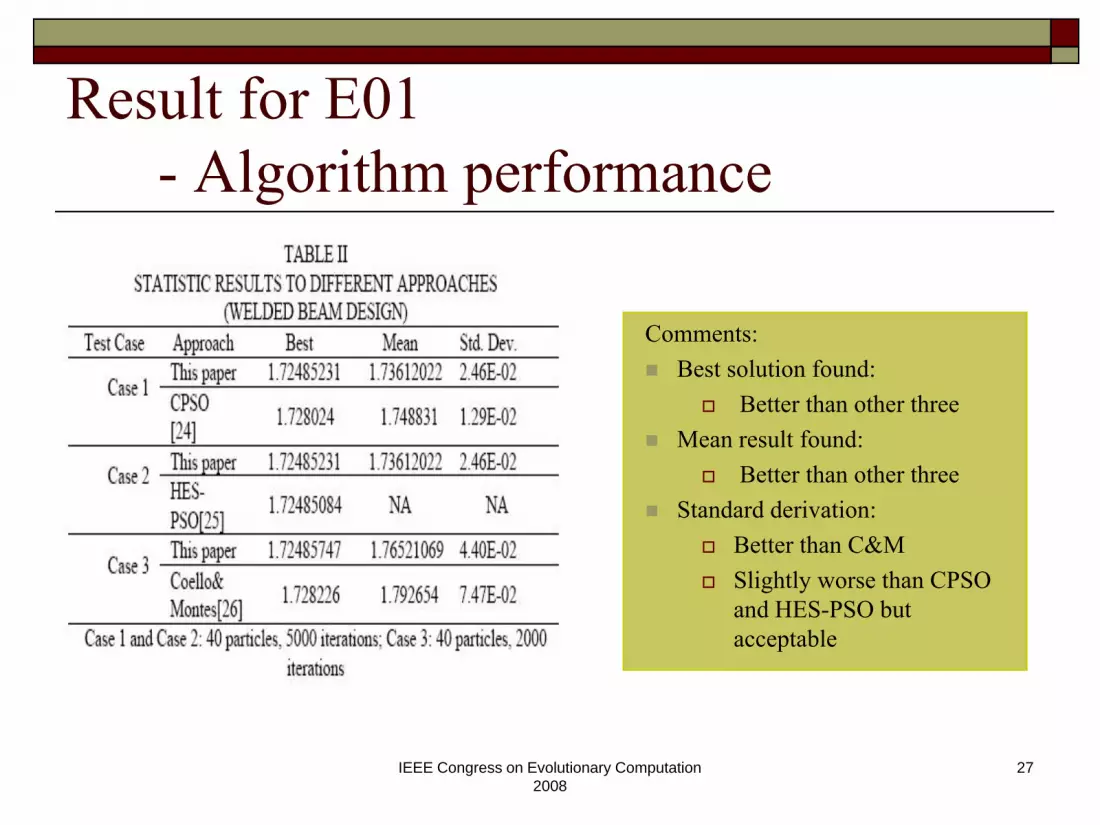
Result for E01- Algorithm performance
27IEEE Congress on Evolutionary Computation 2008
Comments:Best solution found:
Better than other threeMean result found:
Better than other threeStandard derivation:
Better than C&MSlightly worse than CPSO and HES-PSO but acceptable

Result for E02- Design variables
28IEEE Congress on Evolutionary Computation 2008
Comments:The best-known: 6059.94634 Our best result: 5971.4003 Mean: 6049.1590 Standard dev.: 22.841537 Search quality: goodConsistency: good

Result for E02- Algorithm performance
29IEEE Congress on Evolutionary Computation 2008
Comments:Best solution found:
Better than other threeMean result found:
Not as good as other threeStandard derivation:
Not as good as other threeBy looking up Table III, it seems our approach needs more iterations to achieve consistent results.

Result for E03- Design variables
30IEEE Congress on Evolutionary Computation 2008
Comments:The best-known: 0.012665 Our best result: 0.012665236 Mean: 0.012714543 Standard dev.: 6.28E-05 Search quality: goodConsistency: good

Result for E03- Algorithm performance
31IEEE Congress on Evolutionary Computation 2008
Comments:Best solution found:
Better than other threeMean result found:
Similar to other threeStandard derivation:
Similar other three
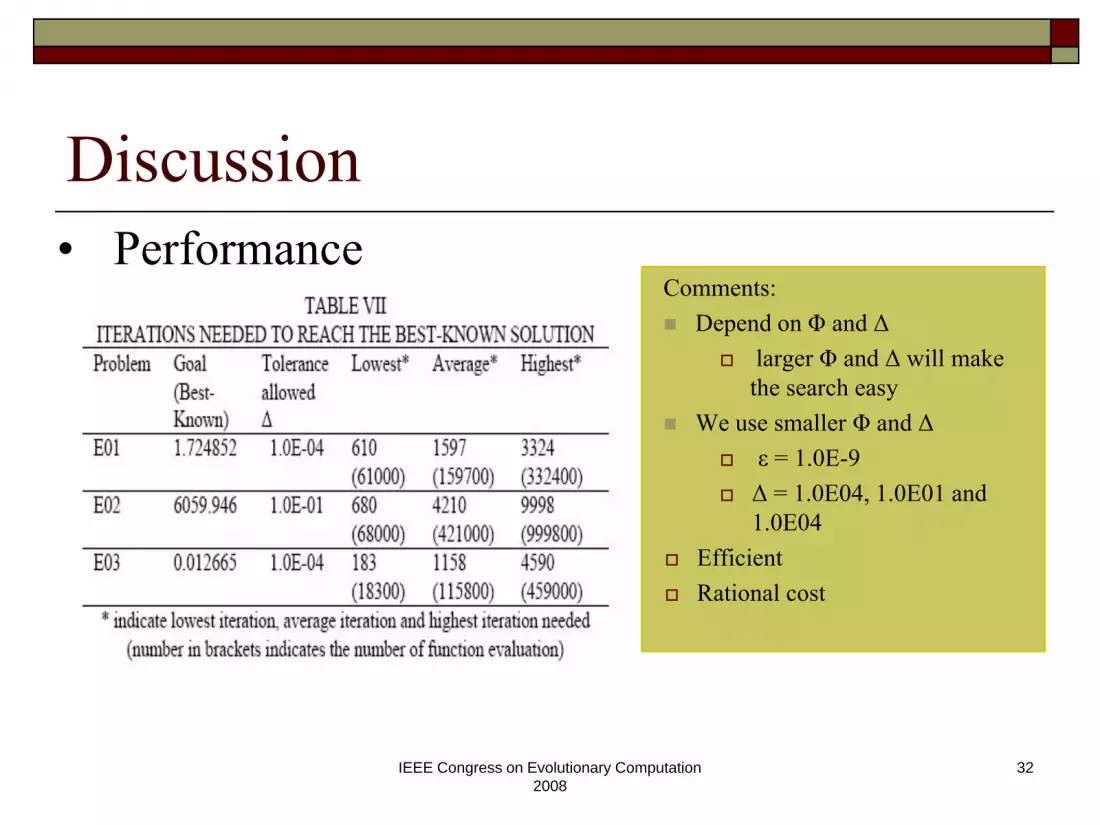
Discussion• Performance
32IEEE Congress on Evolutionary Computation 2008
Comments:Depend on Φ and Δ
larger Φ and Δ will make the search easy
We use smaller Φ and Δε = 1.0E-9 Δ = 1.0E04, 1.0E01 and 1.0E04
EfficientRational cost

ConclusionMulti-objective constraint handling methodAdopt domination conceptSelection rulePerturbation for diversityNo problem-dependent parametersRational computation costSimulation to 3 engineering design problems demonstrated: capability, efficiencyMethodology can be applied to wider applications
33IEEE Congress on Evolutionary Computation 2008