a cooperative fuzzy game theoretic approach to multiple objectivedesign optimization
TRANSCRIPT

ELSEVIER European Journal of Operational Research 83 (1995) 547-567
EUROPEAN JOURNAL
OF OPERATIONAL RESEARCH
Theory and Methodology
A cooperative fuzzy game theoretic approach to multiple objective design optimization
A.K. Dhingra a,., S.S. Rao b a Department of Mechanical Engineering, University of Wisconsin, Milwaukee, W153201, USA
b School of Mechanical Engineering, Purdue University, West Lafayette, IN 47907, USA
Received August 1992; revised April 1993
Abstract
The utility and applicability of cooperative game theory in an engineering design process is examined. It is shown how game theory may be used as a tool for solving multiple objective optimization (MOO) problems. The concepts in cooperative game theory and fuzzy set theory are combined to yield a new optimization method referred to herein as cooperative fuzzy games. The concept of cooperative fuzzy games can be applied to solve not only well- and ill-structured single and MOO problems, but also preliminary decision making and design problems where only a feasible solution is sought and no objective functions are specified. A completely general formulation capable of solving decision making problems with partly crisp and partly fuzzy objective functions, as well as partly crisp and partly fuzzy constraints is presented. It is shown that existing techniques for solving crisp and fuzzy mathematical programming problems are special cases of this general formulation. The computational procedure is illustrated via an application to a MOO problem dealing with the design of high speed mechanisms.
Keywords: Design; Fuzzy sets; Optimization; Multiple criteria programming
1. Introduct ion
M o d e m computer-aided design methods for engineering systems generally assume that a scalar objective function or functional such as cost, efficiency, or weight can be defined so that standard computational algorithms from mathematical programming can be applied to determine an optimum solution. The usefulness of these methods is seriously limited because the performance of a complex engineering system depends on several different, often conflicting, criteria that cannot be combined into a single measure of performance. Hence, a consideration of multiple objective functions becomes an important aspect in the design of several engineering systems.
Furthermore, while modeling real world decision making problems, a decision maker (DM) is often forced to state a problem in precise mathematical terms rather than in real world terms that are often imprecise in nature. The relationships and statements used for problem description may be imprecise not
* Corresponding author.
0377-2217/95/$09.50 © 1995 Elsevier Science B.V. All rights reserved SSDI 0377-2217(93)E0324-Q

548 A.K~ Dhingra, S.S. Rao / European Journal of Operational Research 83 (1995) 547-567
because of randomness, but owing to inherent fuzziness in the system. With increasing system complex- ity, one's ability to make precise and significant statements about a given system diminishes further (Zadeh, 1973). Consequently, the closer one examines a real world problem, the fuzzier its description becomes. Fuzzy set theories can effectively model such domains in which the description of activities and observations are 'fuzzy' in the sense that there are no sharply defined boundaries of the set of activities or observations to which the descriptions apply. These theories enable one to structure and describe activities that differ from each other vaguely, to formulate them in models, and to use these models for problem solving and decision making (Bellman and Zadeh, 1970; Zadeh, 1973).
In this paper we first show how game theory may be used as a decision making tool in solving multiple objective optimization (MOO) problems. The concepts in cooperative game theory and fuzzy set theory are then combined to yield a new optimization method referred to herein as, cooperative fuzzy games. Finally the complete computational procedure is shown via an application to the design of high speed mechanisms.
Game theory is a mathematical tool for the analysis of conflicting interests situations. The conflict includes players who select various strategies from a set of available strategies. While the conflicting payoffs may put the players at cross purposes, there may also be room for cooperation between them. Game theory attempts to abstract essential elements of such competitive situations, put them in mathematical models, and use these models for decision making. An MOO problem can be viewed as a game where each player corresponds to an objective function. These players are competing with each other to improve their overall position subject to a limited supply of resources. Two theories have been used to abstract the conflicting interests situation between the players; the non-cooperative model based on the concept of a Nash equilibrium, and the cooperative model based on the concept of a Pareto-opti- mal solution (Luce and Raiffa, 1957; Leitmann, 1975).
In a non-cooperative game, each player is looking out for his own interests and is unconcerned how his choice will affect the payoffs for other players. With this outlook each player selects a suitable strategy for himself. The players then engage in bargaining and exchange resources until an equilibrium is reached. The resulting solution, referred to as Nash equilibrium, is a solution where no player may improve his payoff by attaining some c~ifferent amount of resources as long as other players maintain their resource choices. A cooperative model, on the other hand, assumes that each player is a part of a team and is willing to compromise his own payoff to improve the situation as a whole. A cooperative game proceeds with the intent that the team wants to allocate resources such that all players are as bet ter off as possible, and an improvement in the payoff for one player does not result in an unacceptable loss for another player. The von Neumann-Morgenstern theory for cooperative games yields a multitude of such solutions that are all non-dominated (von Neumann and Morgenstern, 1947). The bargaining scheme postulated by Nash yields a unique and optimal distribution of resources such that the arbitrated outcome is Pareto-optimal (Nash, 1950, 1953; Rao and Hati, 1980).
The game theoretic class of methods, however, can be used only when the MOO problem is well defined. This requires that the problem data be known precisely, the constraints delimit a well defined set of feasible solutions, and the objective functions be well defined and easy to formulate. Frequently while modeling real world decision making problems, the problem data, constraints, a n d / o r objective functions cannot be stated precisely. Consequently a DM is unable to state a problem in precise mathematical terms, which in turn limits the applicability of classical MOO techniques. Fuzzy set theories help alleviate such modeling difficulties by enabling a DM to structure and describe activities that differ from each other vaguely, to formulate them in models, and to use these models for problem solving and decision making (Bellman and Zadeh, 1970; Rao, 1987; Dhingra et al., 1990a).
In this paper, we combine the concepts in cooperative game theory and fuzzy set theory to yield a new optimization method referred to herein as cooperative fuzzy games. The concept of cooperative fuzzy

A.K. Dhingra, S.S. Rao / European Journal of Operational Research 83 (1995) 547-567 549
games can be applied to solve not only well- and ill-structured single and MOO problems, but also preliminary decision making and design problems where only a feasible solution is sought and no objective functions are specified. New fuzzy operators have been introduced for aggregating membership functions corresponding to fuzzy objective functions. A completely general formulation capable of solving optimization problems with partly crisp and partly fuzzy objective functions, as well as partly crisp and partly fuzzy constraints is presented. It is shown that existing techniques for solving crisp and fuzzy mathematical programming problems are special cases of this general formulation.
2. Multiobjective problem and Pareto-optimal solutions
A general multiobjective problem is of the form
min f ~ X ) = [ f l ( X ) , r E ( X ) . . . . , f k ( X ) ] T (1)
subject to X ~ S = [ X I X ~ Nn, g i ( X ) <ai ' h i ( X ) =bj] (2)
where X is an n-dimensional vector of decision variables, f l ( X ) . . . . . f k ( X ) are k distinct objective functions, and S is the set of feasible solutions. For a single objective problem, an optimum solution is defined as one that minimizes the objective function f i ( X ) , X ~ S. For a multiobjective problem, an attempt to define a vector minimal point as one at which all components of the objective function vector f a r e simultaneously minimized is not an adequate generalization since such 'utopia' points are seldom attainable. Therefore the concept of a Pareto-optimal and weakly Pareto-optimal solution has been found to be useful in the context of MOO problems (Geoffrion, 1968; Hwang and Masud, 1979).
A feasible solution X * ~ S is called a Pareto-optimal solution if there is no ~,Y~ S such that f i ( X ) < f i ( X * ) , i = 1 , . . . , k, and f io(X) <rio(X*) for at least one i 0 ~ [1 . . . . . k]. Alternately, a decision vector X* is Pareto-optimal if there exists no feasible vector .,Y which would decrease some objective function fi without causing a simultaneous increase in at least one other objective function fj, i 4:j. A feasible solution X * ~ S is called a weakly Pareto-optimal solution if there is no X ~ S such that f i ( X ) < f i ( X * ) , i = 1 . . . . . k. If X* is Pareto-optimal, then X* is weakly Pareto-optimal. The converse, however, is true only under special circumstances.
Unless an optimization problem is convex, only a locally optimal solution is guaranteed using standard mathematical programming techniques. Therefore, the concept of Pareto-optimality needs to be modi- fied to introduce the notion of a locally Pareto-optimal solution for a non-convex problem as (Geoffrion, 1968): A solution X * ~ S is said to be locally Pareto-optimal if and only if 36 > 0 such that X* is Pareto-optimal in S A N( X* , 6) where N( X* , 6) denotes a neighborhood of X*, i.e., the set [ X I X ~ S, II x - x * II z < 6].
The set of Pareto-optimal solutions usually consists of infinitely many points and additional informa- tion is needed to order the set of Pareto-optimal solutions. This makes it possible to bring in additional considerations that are not included in the optimization model, thus making the multiobjective approach a flexible technique for most decision making and design problems. A game theoretic formulation for an MOO problem that helps determine an optimal compromise solution from the set of Pareto-optimal solutions is presented next.
3. The bargaining model
Consider a game-theoretic problem with two players. Assume there exists a utility (payoff) function U/(X) associated with each player i such that if strategy X ( X ~ S) is selected, player i's payoff will be

550 A.K. Dhingra, S.S. Rao / European Journal of Operational Research 83 (1995) 547-567
c - O
e -
4-a
L
~3
Pareto-optimal frontier
Ii,
Player l 's u t i l i ty function
Fig. 1. Pareto optimal frontier.
U~(X). The two players engage in bargaining a n d desire a trade such that their utility functions are maximized. There also exists a status-quo point X w ~ S such that if both players decide not to cooperate, their payoffs will be u*(Ul(Xw)) and v*(Uz(X,v)) respectively (see Fig. 1). To maximize their utilities, player one desires a trade represented by a point as far to the right as possible in S, while player two wishes a point as high in S as possible. Using the image of S (Fig. 1), it can be seen that line a-b-c represents the best payoffs both players can hope for. Consequently line a-b-c constitutes the Pareto-op- timal frontier. The von Neumann-Morgens te rn theory contends that selection of a unique solution from the multi tude of solutions on Pareto-optimal frontier depends on the psychological aspects of players, and n e e d not be amenable to mathematical abstraction. An arbitration scheme postulated by Nash (1950) helps determine a unique solution from the set of Pareto-optimal solutions.
The bargaining model used in this work as follows. Assume there exists a convex, bounded and closed set of alternatives S, a special point X w ~ S corresponding to point of no agreement (status-quo) between the players, and a set of utility functions U~(X), i = 1 , . . . , k, associated with each player. To determine a fair solution, a bargaining function B(X) is defined as 1
k
B ( X ) = FI [ q ( x ) - q (Xw)] (3) i=1
for all X ~ S* c S, where
s* = [xlx s, q ( x ) - (Xw) - 0]. (4)
An optimum compromise solution Y °pt is then given as
B ( X °pt) = m a x B(X) , X~S* . (5)
This bargairiing (arbitration) scheme yields an alternative X °pt which maximizes the product of each player's distance from the status-quo point.
1 Unde r mild assumptions it can be proved that the bargaining function as defined is unique.

A.t£ Dhingra, S.S. Rao /European Journal of Operational Research 83 (1995) 547-567 551
Consider now an MOO problem with k objective functions (Eqs. (1)-(2)). A game-theoretic formula- tion for this problem consists of k players where each player corresponds to an objective function. The bargaining function B ( X ) for this MOO problem is given as
k B ( X ) = YI [ f i (Xw) - f i ( x ) ] • (6)
i=1
Here objective functions fi have to be minimized whereas in Eq. (3), the utility functions U,.(X) are maximized. In Eq. (6), f ; ( X w) is the worst value of objective function f~ that player i is willing to accept. A systematic step-by-step procedure for Calculating this value is given in a later section (Section 6).
Implicit in the bargaining function given above is the assumption that all objective functions f~'s are equally important. If we associate differing degrees of importance with objective functions, the bargain- ing function B ( X ) is generalized as
k B ( X ) = H [f i (Xw) - f i ( x ) ] wi (7)
i=1
where wi's are relative degrees of importance of objective functions fi's. The weights w z can be determined using the Saaty's method of paired comparisons (Saaty, 1977). Thus a game theoretic formulation for an MOO problem yields
k max B ( X ) = YI [f~(Xw) - - f i ( X ) ] wl (8)
i=l
subject to X ~ S*. (9)
The game theoretic formulation for an MOO problem (Eqs. (8)-(9)) (i) yields an optimum solution that is Pareto-optimal, 2 (ii) requires minimal amount of subjective information from the DM (only fi(Xw) are needed), (iii) requires no interpersonal comparison of utilities amongst various objective functions fi's, and (iv) insures that at the final solution all objective functions attain acceptable values. Several commonly used MOO techniques such as the weighting method, goal programming, and goal attainment methods lack one or more of these desirable features that cooperative game theory possesses (Hwang and Masud, 1979; Dhingra et al., 1990b). However, this formulation can be used only when the MOO problem is well defined. A generalization of this formulation to the case when the problem data, constraints, a n d / o r objective functions are not known precisely is presented next. The generalization is based on the concepts in fuzzy set theory (Zimmermann, 1985). Towards this end, a critical review of fuzzy sets, especially the concept of fuzzy intersection is presented first. This concept forms the basis of a decision making process in a fuzzy environment.
4. Fuzzy intersection
Consider two normal 3 fuzzy sets A and B. A fuzzy intersection i is defined as the mapping (Zimmermann, 1985)
i: [0,1] × [0,1] ~ [0,1], with tZAnB(X ) =i[tZA(X), /ZB(X)], (10)
where IXA(X) and /xB(X) denote the membership value of some element X in fuzzy sets A and B
2 The proof is given in Section 6, case 2. 3 A fuzzy set is referred to as a normal fuzzy set if its membership function /z i is such that 0 </x i < 1.
552 A.K. Dhingra, S.S. Rao / European Journal of Operational Research 83 (1995) 547-567
respectively, and ' × ' in Eq. (10) denotes the cartesian product of two fuzzy sets. For n fuzzy sets, the above definition can be generalized to yield
i: [0,1] ~ ~ [0,1], (11)
where [0 ,1] n denotes the cartesian product of n fuzzy sets. Next, consider a fuzzy optimization problem with n fuzzy goals G k, k = 1 . . . . , n, where G k could be a fuzzy objective function or a fuzzy constraint. These fuzzy goals need to be aggregated (intersected) to determine an overall fuzzy decision function D. Let S denote the set of feasible solutions (alternatives). A fuzzy intersection operator i used to aggregate these fuzzy goals must satisfy the axioms stated in Appendix A. In addition, the fuzzy intersection operator i also satisfies the following relations. (See Appendix B for proofs to these statements.) 1. A fuzzy decision function D defined as intersection of two fuzzy sets with membership funct ions/z 1
a nd / z 2 where 0 </z I < 1 and / z e = 1 has a membership value/z 1 (Theorem B.1, Appendix B). 2. A fuzzy decision function D defined as intersection of two fuzzy sets with membership functions /z 1
a n d / z 2 where 0 < /Zl , /z e < 1 has a membership value bounded from above by the smaller o f / z 1 and ~z (Theorem B.2, Appendix B).
3. The only fuzzy aggregation operator i that satisfies all the axioms stated in Appendix A is the 'rain' operator (Theorem B.3, Appendix B).
Let us examine the min operator commonly employed for aggregating fuzzy sets (Feng, 1983; Rao, 1987; Dhingra et al., 1990a). The global decision function D depends on the worst rating only, and does not take into account the superiority of other ratings. The compatibility of any decision X ~ S is bounded from above by its compatibility with respect to the least achieved goal. Further, the DM is implicitly assuming the goals to be aggregated are not interacting in the decision making process, i.e. the membership function of G i is independent of the membership function (achievement level) of Gk, i 4: k. This non-interactiveness assumption is questionable in several decision making scenarios.
From a game theoretic point of view, when a min operator is employed to aggregate fuzzy sets, the decision process corresponds to a noncooperative game, where each player is looking for his own interests, and is unconcerned about the achievement level of other players. This in turn implies that an improvement in the satisfaction level of each player is at the expense of his opponents, and no cooperation exists between various players. On other hand, the bargaining model given in Section 3 permits a t radeoff between various goals whereby players are willing to compromise their own payoffs to improve the situation as a whole. The unsuitability of the rain operator for aggregating fuzzy goals in a cooperative decision making process requires us to search for more appropriate fuzzy aggregation operators. A general class of means described next realizes a tradeoff between conflicting fuzzy goals by allowing a positive compensation between various fuzzy ratings.
5. General class of me a ns
A tradeoff in a decision making process corresponds to viewing the global evaluation of an action as lying between the worst and the best individual ratings. This occurs in the presence of conflicting goals, when a compromise between the corresponding compatibilities is allowed. A compromise attitude between conflicting goals is expressed as
Va, b ~ [0,1], min(a , b) < h ( a , b) < m a x ( a , b) (12)
where h is a suitable fuzzy aggregation operator that models a t radeoff between two fuzzy goals, whose membership values are a and b respectively. A class of averaging operators that span the entire interval
A.K. Dhingra, S.S. Rao /European Journal of Operational Research 83 (1995) 547-567 553
between min and max operators are called the generalized means. The general class of means is of the following form (Dubois and Prade, 1984):
z , ~ = a D ~ b = (½(a '~+b '~) ) 1/'~ (13)
where z , satisfies Axioms A.1-A.5 (Appendix A) and [ ] , represents a parametric class of symmetric, continuous and idempotent aggregation operators. Taking logarithms of both sides of Eq. (13) yields
ln(a ~ + b " ) - In 2 In z,~ = ln(a • , b) = (14)
O/
As a ~ 0,
ln (a" + b ") - In 2 lim In z~ = lira , (15) a~0 ~ 0 O~
Eq. (15) reduces to the form 1 °°. Using l 'Hospital's rule, Eq. (15) can be written as
I [ l u a --[- I n b ] . ( 1 6 ) lim In z,, = o~ ----~ 0
Thus, one has
z 0 = ~ - . (17)
This is the well known geometric mean. Generalizing the above procedure to n fuzzy sets yields
z0 = ( X l x 2 " " x.) 1In (18)
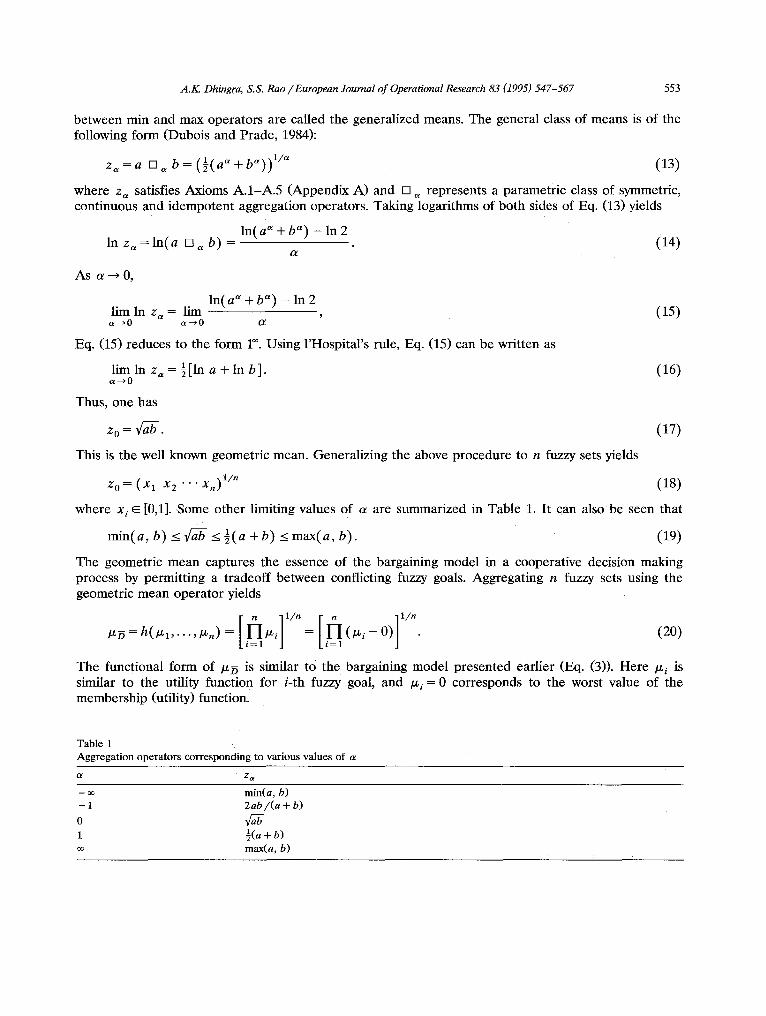
where Xg ~ [0,1]. Some other limiting values of a are summarized in Table 1. It can also be seen that
min(a , b) _< ~ _< ½(a + b) _< max(a , b) . (19)
The geometric mean captures the essence of the bargaining model in a cooperative decision making process by permitting a t radeoff between conflicting fuzzy goals. Aggregating n fuzzy sets using the geometric mean operator yields
r n 11/n [i=l~.= ]x/n ]'~D = h ( ld~ l . . . . . ]&n) = [i~=l]&i] = ( / z i - 0 ) (20)
The functional form of /x~ is similar tO the bargaining model presented earlier (Eq. (3)). Here /tz i is similar to the utility function for i-th fuzzy goal, and ~i = 0 corresponds to the worst value of the membership (utility) function.
Table 1 Aggregation operators corresponding to various values of a
a Z a DC~
-1 0 1
min(a, b) 2ab / (a + b) i f f ½(a + b) max(a, b)

554 A.K. Dhingra, S.S. Rap/European Journal of Operational Research 83 (1995) 547-567
6. Cooperative fuzzy game theoretic approach
Consider next a completely general version of the 'crisp' MOO problem given by Eqs. (1)-(2). The generalized version has nff fuzzy objective functions, ncf crisp objective functions, nfg fuzzy inequality constraints, ncg crisp inequality constraints, nfh fuzzy equality constraints, and nch crisp equality constraints. A (locally) Pareto-optimal solution to this generalized multiobjective problem is obtained by solving the following problem which combines fuzzy and game theoretic concepts presented in Sections 3-5.
max B + ah (21)
subject to (22)
(23)
A _< P~F,
A _~L~i , i = 1 . . . . . nfg,
A_</x~7~, i = 1 . . . . ,nfh,
X ~ S = [ X I X ~ R n, gi <ai, hj=bj, i= 1 . . . . . ncg, j = 1 . . . . . nch],
where B and ~p are defined as
ncf B = i '-[[Fiu-f i ]
i=1
[ nff ] 1/nff
(24)
(25)
(26)
(27)
and 'a' is a DM supplied parameter. 4 The crisp objective functions are combined using the bargaining model given by Eq. (26). (The similarity between Eq. (26) and Eq. (6) is evident). In this equation, Flu denotes the worst (status-quo) value for the i-th objective function, which can be determined by: (i) finding solutions to individual single objective optimization problems: min f i (X) subject to the complete constraint set, i = 1,. . . ,(ncf + nff), and (ii) determining the best (f i(X*)) and worst values (fi(X*)), i, j = 1 . . . . . (ncf + nff), for each of the objective functions. This computational procedure helps each player analyze the maximum benefit he can obtain while negotiating with other players. It also apprises each player i of (i) the extreme conditions of other players [fs(X*), Fju], (ii) helps him in guaranteeing against his worst value (Flu), and (iii) insures that none of the players begin bargaining from a reference value that is unacceptable to other players.
The bar over a symbol shows that the expression or variable contains fuzzy information. The membership functions corresponding to fuzzy equality (/zl7 i) and inequality (/x~i) constraints are aggregated using the fuzzy min operator. The min operator does not permit any tradeoff between the fuzzy constraints, which must all be satisfied during the optimization process. The non-interactiveness assumption for fuzzy constraints holds in most decision making scenarios. To preserve the cooperative attitude expressing a tradeoff between fuzzy goals, a geometric mean operator is used for aggregating membership functions corresponding to fuzzy objective functions. A min operator is used to aggregate fuzzy sets corresponding to fuzzy objective and constraint functions since the complete optimization problem entails that both fuzzy objective functions and fuzzy constraints be satisfied. The crisp equality and inequality constraints are appended to the problem formulation as given by Eq. (25).
4 A detailed discussion on this parameter is given in Section 7.

A.K. Dhingra, S.S. Rao / European Journal of Operational Research 83 (1995) 547-567 555
The fuzzy game theoretic formulation given by Eqs. (21)-(25) can be used to solve not only well- and ill-structured single and MOO problems, but also preliminary decision making and design problems with no objective functions. Depending on the values for nff, ncf, ncg, nfg, nch and nfh, it can be shown that existing techniques for solving crisp and fuzzy mathematical programming problems are special cases of the fuzzy game theoretic formulation (Eqs. 21)-(25). Ten special cases along with necessary theorems for optimality are outlined next.
Case 1. nff = nfg = nfh = 0, ncf = 1. The proposed formulation reduces to
max(Flu - f l ) (28)
subject to X ~ S,
or in other words
min f l (29)
subject to X ~ S.
This is a mathematical programming problem with a single objective function and crisp design con- straints. An optimal solution to this problem can be obtained using standard optimization techniques.
Case 2. nff = nfg = nfh = 0, ncf > 2. The proposed model reduces to
max B (30)
subject to X ~ S.
This formulation is identical to the game theoretic approach for an MOO problem given by Eqs. (8)-(9).
Theorem 1. I f X * is a (locally) optimal solution to the above problem, then X * is (locally) Pareto-optimal.
Proof. Assume that X* is not (locally) Pareto optimal. Then 3 X ~ S such that
f i ( X ) < f i ( X * ) V i ~ [1 . . . . ,ncf]. (31)
and
3 i 0 ~ [1 . . . . . ncf] such that rio(X) <rio(X*) . (32)
If the above equations hold, then ncf ncf I-I [F /u - f i ( . e~ ) ] > l-I[Fiu-fi(X*)] (33) i=1 i=1
which contradicts that X* is a (locally) optimal solution. Hence X* is (locally) Pareto-optimal.
Case 3. nff = ncg = nch = 0, ncf >_ 2. The proposed formulation yields
max B +aA subject to A -</*~i, i = 1 . . . . . nfg,
A <it,q,, j = 1 . . . . ,nfh.
The functional form of the objective function incorporates a t radeoff between an improvement in the value of supercriterion (B) and the degree of constraint violation ( 1 - a). When a = 1, all fuzzy constraints are completely satisfied. The value of the supercriterion is lowest for this case. When all fuzzy constraints are completely violated (a = 0), the supercriterion attains its highest value. Thus the composite objective function B + aa achieves a t radeoff between an improvement in the value of supercriterion (B) and the degree of constraint violation.
556 A.K. Dhingra, S.S. Rao ~European Journal of Operational Research 83 (1995) 547-567
If ncg >__ 0, and nch > 0, the previous formulation can be generalized to yield
max B +ah
subject to A _</z~i, i = 1 , . . . , n fg ,
A </x%, j = 1 , . . . , n f b ,
X ~ S .
Optimization problems with crisp objective functions and cr isp/fuzzy constraints can alternately be cast in the following form:
max B (34)
subject to a_</zci , i = 1 , . . . , n fg , (35a)
a _</x~Tj, j = l . . . . ,nfh, (35b)
X ~ S. (35c)
This formulation is a generalization of the alpha-cut approach for fuzzy optimization that allows for multiple objective functions. It can be used to find an extremum of crisp objective function(s) which are subject to fuzzy (and crisp) constraints.
Case 4. ncf = ncg = nch = 0. The optimization problem has only fuzzy objective functions and fuzzy constraints. Consequently the proposed formulation reduces to
m a x a A
subject to A </xp,
A_</xci, i = 1 . . . . ,nfg,
Z </ ,Hj, j = l . . . . . nfh.
Case 5. n c f = nfg = nfh = O. The optimization problem has fuzzy objective functions and crisp constraints. A (locally) Pareto-optimal solution is obtained by
max aA
subject to A </zp,
X ~ S .
This formulation can also be restated as
max/z r
subject to X ~ S.
Theorem 2. I f X* is a (locally) optimal solution to the above problem, then X * is (locally) Pareto-optimal.
Proof. Assume that X* is not (locally) Pareto-optimal. Then 3.,Y ~ S such that
f i ( X ) <_fi(X*) Vi ~ [ 1 , . . . , n f f ]
and
3 i 0 ~ [ 1 . . . . . nff] such that f i o ( X ) < f i o ( X * ) .

Since the membership equations hold:
~/ , (~) _> ~ii(x*) arid
o r
A.K. Dhingra, S.S. Rao / European Journal of Operational Research 83 (1995) 547-567 557
functions are monotonically nonincreasing functions of fg'S, the following
Vi ~ [ 1 , . . . , nff] (36)
3 i o ~ [ 1 , . . . , n f f ] suchtha t /Zfgo(_~ ) >/ZAo(X*), (37)
nff nff
Yl~+~(x) > Yl~+~(x*). (38) i = 1 i = 1
[ '~f _ 1 ' / ' ~ r n . 11 /n~
1 G . Eq. (39) contradicts that X* is a (locally) optimal solution. Hence X* is (locally) Pareto-optimal.
Case 6. ncf = 0. Case 6 is a generalization of case 4 when crisp constraints are also present in the problem formulation. An optimal solution is obtained by
max aA
subject to h _</zF,
A_</z~i , i = l , . . . , n f g ,
h _</zErs, j = 1 , . . . , n f h ,
X ~ S .
Case 7. ncg = nch = 0. Case 7 is similar to the original fuzzy game theory formulation (Eqs. (21)-(25)) except that no crisp constraints are present. An optimal solution to this problem is obtained by
max B + aA
subject to A _</.t F,
h_</.tci, i = 1 , . . . , n fg ,
A_</.t~7 j, j = l . . . . . nfh.
Case 8. nfg = nfh = 0. Case 8 is similar to the original formulation except that fuzzy constraints are absent. An optimal solution to this problem is obtained by
max B + ah
such that h _</.tp,
X ~ S .
Lemma 1. For a > O, if X * is an optimal solution to the above problem, then X * is weakly Pareto-optimal.
Lemma 2. For a > O, i f X * is a unique optimal solution to the above problem, then X * is Pareto-optimal.
Lemma 3. For a > O, i f X * is an optimal solution to the above problem, then X * is Pareto-optimal.

558 A.K. Dhingra, S.S. Rao / European Journal of Operational Research 83 (1995) 547-567
Theorem 3. I f X* is a (locally) optimal solution to the above problem, then X* is (locally) Pareto-optimal.
Proof. The Proof follows from Theorems 1 and 2.
Case 9. nff = ncf = ncg = nch = 0. The optimization problem consists of only fuzzy constraints and no crisp o r fuzzy objective functions are specified. An optimum solution to this problem is obtained by
max aA
subject to A </zc i , i = 1 . . . . . nfg,
A </zHj , j = 1 , . . . , n f h .
Case 10. nff = ncf = 0. The optimization problem has both crisp and fuzzy constraints but no objective functions. An optimum solution is obtained by
max aA
subject to A</xc l , i = l , . . . , n f g ,
A </x~Tj, j = 1 , . . . , n f h ,
X ~ S .
One is most likely to encounter cases 9 and 10 during preliminary a n d / o r conceptual stages of the decision making and design process. During these initial stages, a DM rarely has a performance index that he is trying to optimize. All he is attempting to do is come up with a feasible starting design. Cases 9 and 10 are expected to be useful in solving such problems. Once a preliminary solution is obtained and judged feasible, it can next be optimized using any of the formulations presented in cases 1 through 8.
It may be noted that for optimization problems with fuzzy constraints, i.e. cases 3, 4, 6, 7, 9 and 10, no reference is made to the Pareto-optimality of the optimal solution. This is because for a crisp MOO problem, Pareto-optimality of a solution is based on the assumption that a solution can only be classified as being feasible or infeasible. There is no concept of partial feasibility in classical MOO theory. However, the solutions to a fuzzy optimization problem differ not only with respect to objective function values, but they also differ with respect to their degree of feasibility. Consequently, for problems with fuzzy constraints, the concept of fuzzy Pareto-optimality as defined in Appendix C is needed.
7. Design example
The applicability of cooperative fuzzy game theoretic formulation to engineering design problems is Shown next via an application to a multiobjective problem dealing with the design of high speed mechanisms. This example illustrates how the proposed approach can be used to design a mechanism while simultaneously optimizing several kinematic and dynamic design criteria.
High speed mechanism design application
The primary application of cooperative fuzzy game theoretic techniques to the design of high speed mechanisms involves a determination of mechanism and counterweight variables for the planar four bar mechanism shown in Fig. 2. A total of six (one kinematic and five dynamic) objective functions (criteria) are considered. The kinematic characteristic deals with the minimization of the differnece between the desired and generated motion. The dynamic criteria consist of the minimization of the input driving

A.I£ Dhingra, S.S. Rao ~European Journal of Operational Research 83 (1995) 547-567 559
generated path
Y 0A
X 0A
f
o x Fig. 2. A path generating planar four bar mechanism.
torque, ground bearing forces, and the shaking forces and shaking moments transmitted to the ground link over a cycle. The input crank is rotating at a constant speed of 500 rpm.
The four bar mechanism (Fig. 2) is to be designed to generate a given path with coordinated rotation of the input link. Using Fig. 2, the coordinates of the path traced by the coupler point P are given as
Sg i =XoA d- r 2 COS(02i + a) + r 5 cos(03/+ a) -- r 6 sin(03i + a)
Ygi = YoA + r2 sin(02/+ or) + r 5 sin(03i + a) + F 6 COS(03i q- O/)
where
02i = 02s "]- 02i
(40)
(41)
(42)
and (XoA, YoQ are the coordinates of the ground pivot OA, ff is the angular orientation of the ground link, r i (i = 1 . . . . . 6) are the link lengths, 02s is the starting position of the input link, and 02i and O3i are the angular orientations of links 2 and 3 at the i-th design position respectively. Let the desired (prescribed) values of the path coordinates be given as (Xdi, Yai). T h e first objective (f l ) deals with the minimization of the structural error over the entire range of motion, and is defined as
N N f l = ~-~ e 2 = E [ ( X d i - X g i ) 2 + (rdi ~ rgi)2] (43)
i=1 i=1
where N denotes the number of design points into which the desired path is divided. To study the dynamics of the mechanism, the kinetostatic method of analysis (Dhingra and Moskowitz,
1991) is used because we are interested in minimizing the bearing forces and torques resulting from a given mechanism motion. The dynamic analysis is carried out by writing the equations of; equilibrium

560 A.K. Dhingra, S.S. Rao /European Journal of Operational Research 83 (1995) 547-567
corresponding to the free body diagrams of each of the three moving links. This results in a system of 9 equations in 9 unknowns (the x- and y-components of the four bearing reactions F12, F23 , F34, F14, and the input driving torque Ts). The dynamic analysis is performed at every five degree rotation of the input link. This results in a total of 72 evaluations during each cycle of crank rotation. The maximum values of input driving torque (f2), shaking force (f3), shaking moment (f4), and the forces transmitted to the two ground pivots (f5 - f6 ) over a cycle are treated as five distinct objective functions. The maximum values of these dynamic performance measures, over a complete cycle, are to be minimized.
The minimization of the six (one kinematic and five dynamic) objective functions defined above is achieved by varying the link lengths rl-r6, ground pivot parameters XOA, YOA and a (a total of 9 design variables), and by adding counterweights to all three moving links. The counterweight radii, thicknesses, and locations are treated as (additional 9) design variables. Thus, the optimization problem has a total of eighteen design variables. The problem is subject to the following constraints: 1. The mechanism must satisfy the loop closure equation at each design position. This is achieved by
using an equality constraint of the form
2/'2/" 4 COS(02i -- 04i ) -- 2 r l r 4 COS 04i "[- 2 f i r 2 COS 02i -1- F~ ~ ?.2 ..}_ r2 ..[_ F2 (44)
at each design position i, i = 1, . . . , N. 2. The structural error at each design position is constrained to be less than a specified quantity A, i.e.
e i < A , i = 1 . . . . . N. (45)
3. A further design restriction that insures that the input link be a crank is stated as
r 1 + r 2 < r 3 + r4 , (46)
[ r 3 -- r4] 2 < [ r I -- r 2 ] 2. (47)
4. Lastly, the value of transmission angle (3') over the entire cycle is constrained as
1 5 ( 4 8 ) gTr _< T _< g'rr.
Additional constraints that insure that each candidate solution is free of any branch and/or order defects can also be imposed at each design position. In the present work, a value of N = 10 is used that results in a total of ten equality (Eq. (44)) and fourteen inequality (Eqs. (45)-(48)) constraints. The coordinates of the prescribed path are as follows:
Xdi = 0.4 -- sin(2-rr ( t i - 0.34)), (49)
Yai = 2.0 - 0.9 sin(2"rr (t i - 0.5)), (50)
where
t i = ( i - 1 ) / N . (51)
The coordinated input link orientations are determined using
02/ = 2art i. (52)
The single objective optimization problems are solved first using an exterior penalty function approach with BFGS and golden-section search methods. The optimum values of objective functions are given in Table 2. Table 2 also includes objective function values at the starting solution. Using these single
A.I~ Dhingra, S.S. Rao / European Journal of Operational Research 83 (1995) 547-567
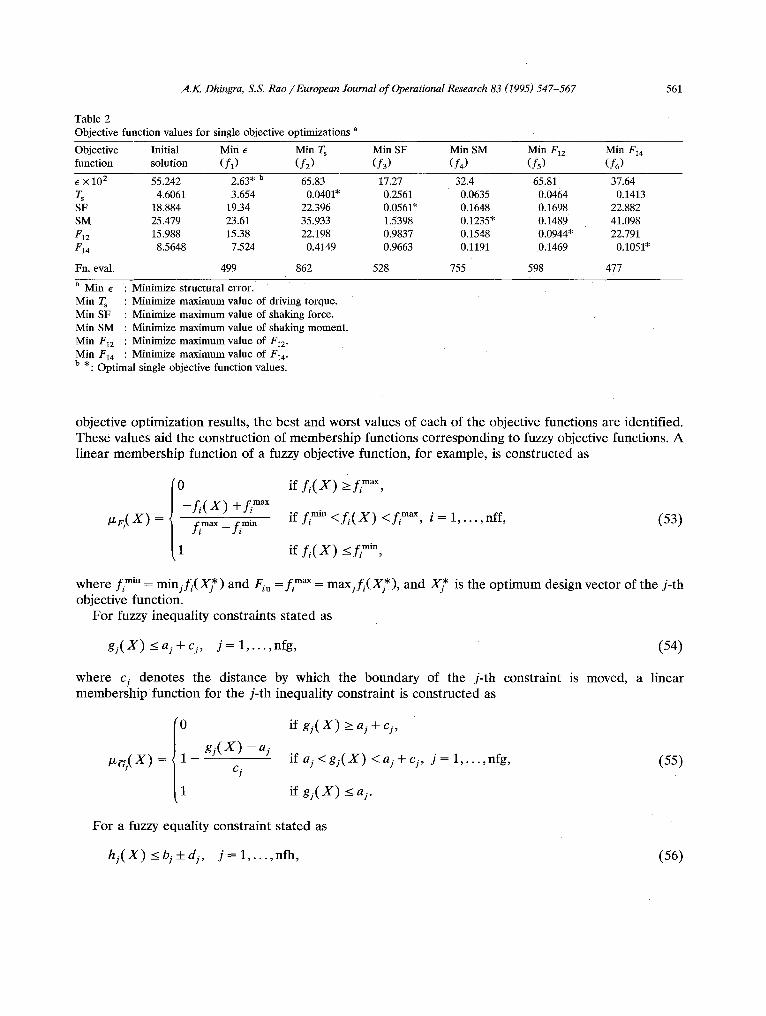
Table 2 Objective function values for single objective optimizations a
561
Objective Initial Mine Min T s Min SF Min SM Min F12 Min F14 function solution (fl) (f2) (f3) (f4) (f5) (f6)
e X 102 55.242 2.63* b 65.83 17.27 32.4 65.81 37.64 T s 4.6061 3.654 0.0401" 0.2561 0.0635 0.0464 0.1413 SF 18.884 19.34 22.396 0.0561" 0.1648 0.1698 22.882 SM 25.479 23.61 35.933 1.5398 0.1235" 0.1489 41.098 F12 15.988 15.38 22.198 0.9837 0.1548 0.0944* 22.791 El4 8.5648 7.524 0.4149 0.9663 0.1191 0.1469 0.1051"
Fn. eval. 499 862 528 755 598 477
a Mine : Minimize structural error. Min T s : Minimize maximum value of driving torque. Min SF : Minimize maximum value of shaking force. Min SM : Minimize maximum value of shaking moment. Min F12 : Minimize maximum value of F12. Min F14 : Minimize maximum value of F14. b . : Optimal single objective function values.
objective op t imiza t ion results, the best and worst values of each of the objective funct ions are identif ied. These values aid the cons t ruc t ion of member sh ip funct ions cor responding to fuzzy objective functions. A l inear member sh ip func t ion of a fuzzy objective funct ion, for example, is cons t ruc ted as
I O-fi( X) + fi max = [1 kmax-kmm
if f i ( X ) >f.max
i f f imi"<fi(X)<f .maxj , , i = 1 , . . ., nff,
if f i ( X ) < f.mi~
(53)
where f/rain = minjL(x7 ) and Flu = f/m~, = maxje(XT), and Xff is the o p t i m u m design vector of the j - th objective funct ion.
For fuzzy inequal i ty cons t ra in ts s ta ted as
g j ( X ) < aj + cj, j = 1 . . . . ,n fg , (54)
where cj denotes the dis tance by which the b o u n d a r y of the j - th cons t ra in t is moved, a l inear m e m b e r s h i p func t ion for the j - th inequal i ty cons t ra in t is cons t ruc ted as
g j ( X ) - aj
cj
if & ( X ) >__aj+ci,
if ay < g i ( X ) < aj + cj, j = 1 , . . . , n f g ,
if gj ( X ) < aj .
(55)
For a fuzzy equal i ty cons t ra in t s ta ted as
h i ( X ) <_bj+di, j = 1 . . . . . nfh , (56)
562 A.K. Dhingra, S.S. Rao /European Journal of Operational Research 83 (1995) 547-567
where d i denotes the distance by which the boundary of the j-th constraint is moved, membership function for the j-th equality constraint is constructed a s
= -
if h i ( X ) >__ bj + dj,
I h i ( X ) - bj I i f b j - d j < h j ( X ) < b j + d i , j = l . . . . . nfh,
if h i (X) < b j - d i.
the linear
(57)
For this design problem, a 10% leeway is permitted in the constraints limiting the magnitude of structural error at each design position (Eq. (45)), as well as the minimum and maximum values of transmission angle over a cycle (Eq. (48)). The remaining constraints are treated as crisp. Once the membership functions of all fuzzy objective functions and fuzzy constraints are constructed, the resulting multiobjective problem is solved using an exterior penalty function approach with BFGS and golden-sec- tion methods.
The DM supplied parameter a exercises considerable bearing on optimum solutions for cases 3, 7 and 8. For case 3, parameter a controls the tradeoff between an improvement in the supercriterion B and the degree of constraint violation. The similarity between a, and DM supplied parameter a in the alpha-cut formulation (Eqs. (34)-(35)) is evident. In the alpha-cut approach, the decision on a suitable value of o~ is somewhat difficult to make, and the optimum solutions obtained depend on the prescribed value of oz. A similar trend was observed for case 3 corresponding to various values of parameter a.
For cases 7 and 8, a acts as a 'meta-level' weighting parameter between crisp (B) and fuzzy (A) bargaining functions. Consider the crisp MOO technique, the weighting method, where F ( X ) = E w i f i is minimized. The Pareto-optimal solution obtained using the weighting method depends on the weighting factors w i. A similar trend is observed for cases 7 and 8 where the fuzzy Pareto-optimal solution obtained depends on the weighting parameter a. By varying the value of a, a series of fuzzy Pareto-optimal solutions can be obtained.
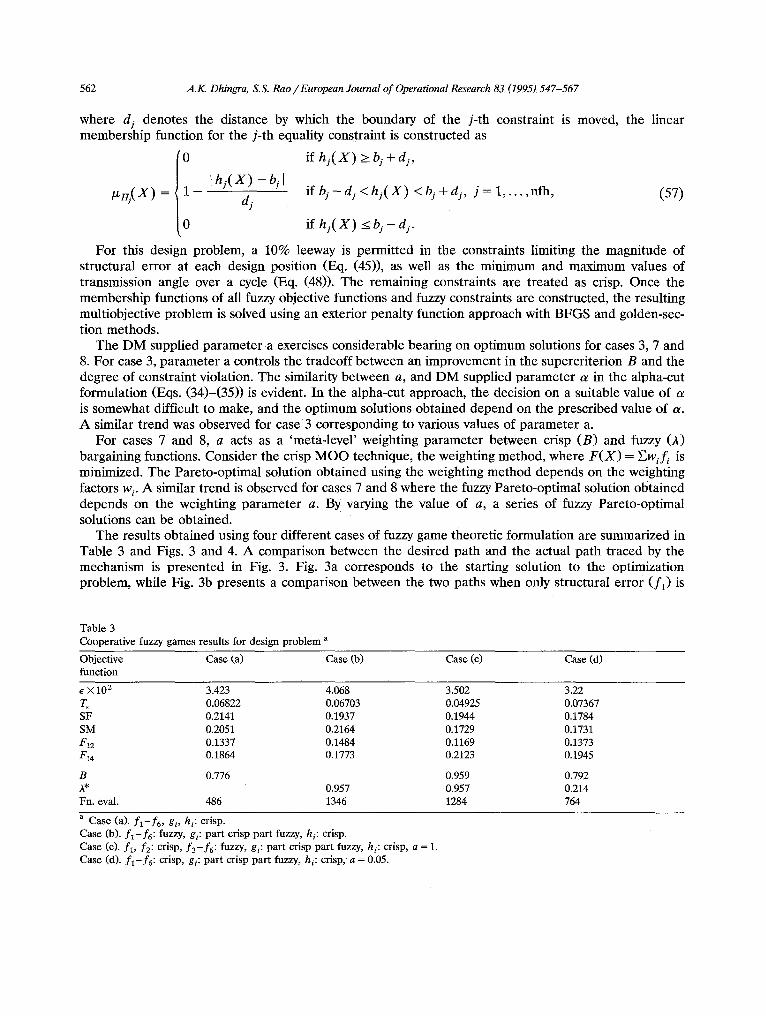
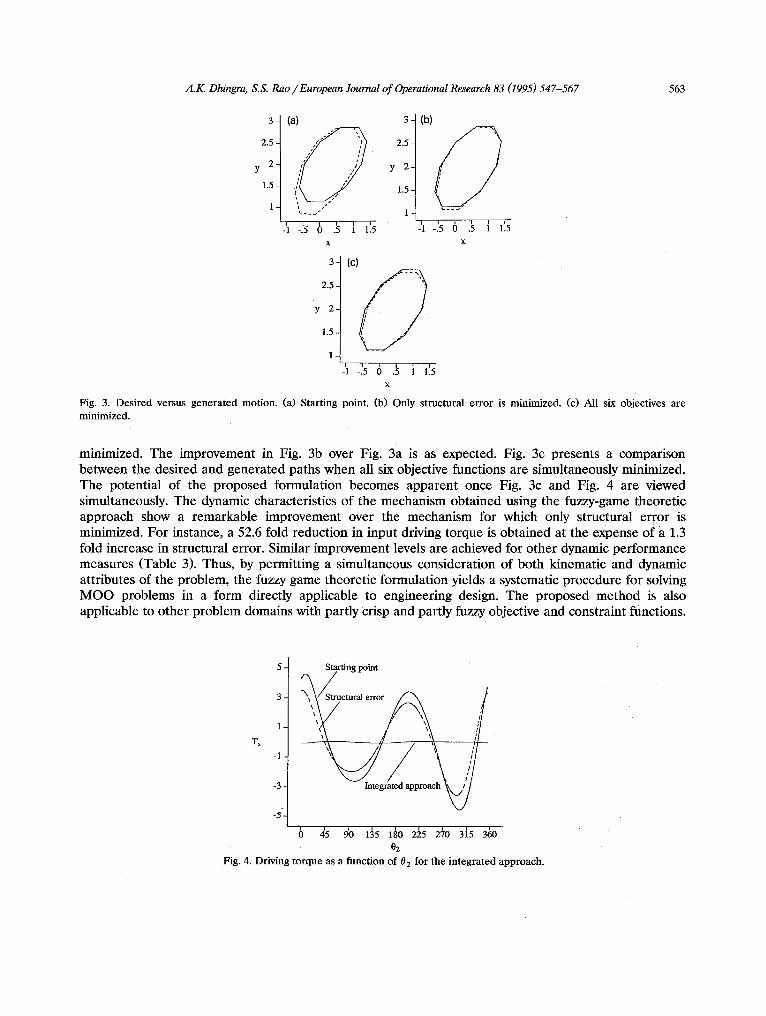
The results obtained using four different cases of fuzzy game theoretic formulation are summarized in Table 3 and Figs. 3 and 4. A comparison between the desired path and the actual path traced by the mechanism is presented in Fig. 3. Fig. 3a corresponds to the starting solution to the optimization problem, while Fig. 3b presents a comparison between the two paths when only structural error (f t ) is
Table 3 Cooperative fuzzy games results for design problem a
Objective Case (a) Case (b) Case (c) Case (d) function
E × 102 3.423 4.068 3.502 3.22 T s 0.06822 0.06703 0.04925 0.07367 SF 0.2141 0.1937 0.1944 0.1784 SM 0.2051 0.2164 0.1729 0.1731 F12 0.1337 0.1484 0.1169 0.1373 E14 0.1864 0.1773 0.2123 0.1945
B 0.776 0.959 0.792 A* 0.957 0.957 0.214 Fn. eval. 486 1346 1284 764
a Case (a). f l - f 6 , gi, hi: crisp. Case (b). f l - f 6 : fuzzy, gi: part crisp part fuzzy, hi'. crisp. Case (c). f i , f2: crisp, f 3 - f6 : fuzzy, gi: part crisp part fuzzy, hi: crisp, a = 1. Case (d). f l - f 6 : crisp, gi" part crisp part fuzzy, hi: crisp, a = 0.05.
A.K. Dhingra, S.S. Rao /European Journal of Operational Research 83 (1995) 547-567 563
.J 2. 2.5
y y 2 1.51 1.5
J 1 -'~-.5 6 .3 i ~.5
x 3-
2.5- y 2- 1.5- 1-
(b)
/
-J5 -] 6 .3 1 t3 x
(c)
-~- .5 6 .~ J 1'.5 x
Fig. 3. Desired versus generated motion. (a) Starting point. (b) Only structural error is minimized. (c) All six objectives are minimized.
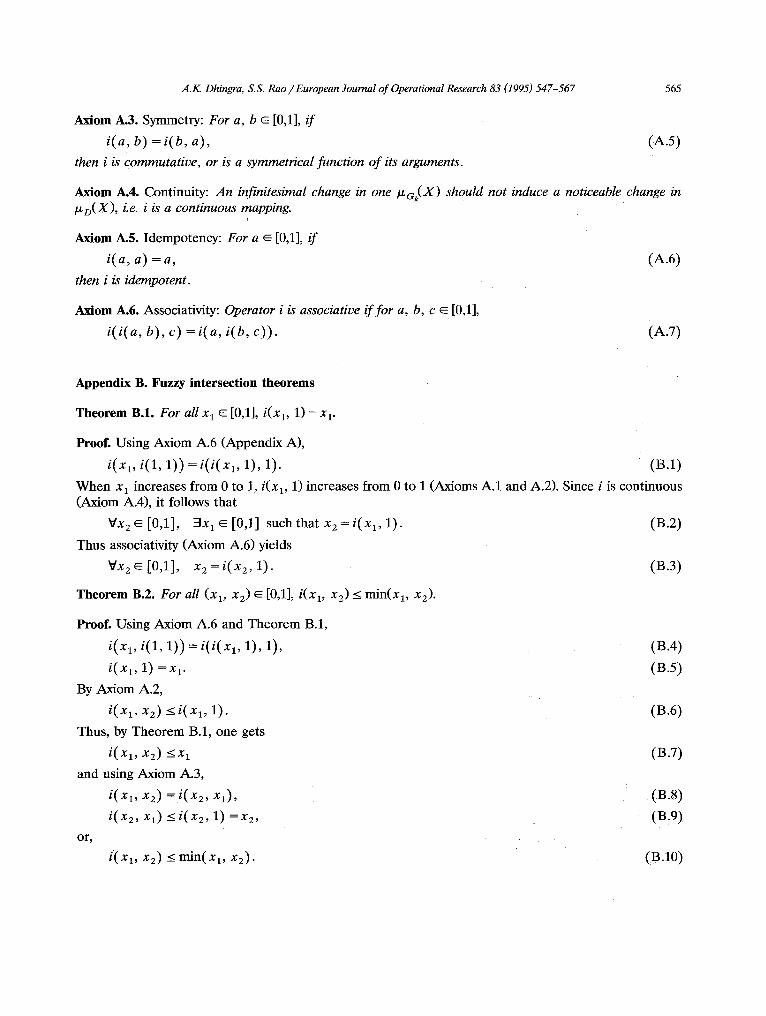
minimized. The improvement in Fig. 3b over Fig. 3a is as expected. Fig. 3c presents a comparison between the desired and generated paths when all six objective functions are simultaneously minimized. The potential of the proposed formulation becomes apparent once Fig. 3c and Fig. 4 are viewed simultaneously. The dynamic characteristics of the mechanism obtained using the fuzzy-game theoretic approach show a remarkable improvement over the mechanism for which only structural error is minimized. For instance, a 52.6 fold reduction in input driving torque is obtained at the expense of a 1.3 fold increase in structural error. Similar improvement levels are achieved for other dynamic performance measures (Table 3). Thus, by permitting a simultaneous consideration of both kinematic and dynamic attributes of the problem, the fuzzy game theoretic formulation yields a systematic procedure for solving MOO problems in a form directly applicable to engineering design. The proposed method is also applicable to other problem domains with partly crisp and partly fuzzy objective and constraint functions.
5- Starting point
3" ~ ] , i 1 ' Ts
-1
-3 J~ Integrated approach
4'5 9'0 115 140 2~5 2÷0 3i5 3~0 02
Fig. 4. Driving torque as a function of 02 for the integrated approach.

564 A.K. Dhingra, S.S. Rao /European Journal of Operational Research 83 (1995) 547-567
8. Conclusions
A new method for solving multiobjective problems based on the concept of cooperative fuzzy games is presented. The proposed approach (i) yields Pareto-optimal solutions, (ii) requires minimal amount of subjective information from the decision maker, (iii) requires no interpersonal comparison of utilities, and (iv) insures that at the compromise solution, all objective functions attain acceptable values. The concept of cooperative fuzzy games can be applied to solve not only well- and ill-structured single and MOO problems, but also preliminary decision making and design problems where only a feasible solution is sought and no objective functions are specified. It is shown that existing techniques for solving crisp and fuzzy optimization problems are special cases of the fuzzy game theoretic formulation. An application of the proposed approach to a mechanism design problem results in designs with superior kinematic and dynamic characteristics. This is accomplished through a compromise between conflicting design requirements. The concept of cooperative fuzzy games should be more generically useful in solving other decision making and design problems with partly crisp and partly fuzzy objective functions and constraints.
Acknowledgments
The research was supported in part by a grant from Corporate Research and Development Center of General Electric Company. The technical monitor was Dr. V. Kumar. This support is gratefully acknowledged. The authors also acknowledge several fruitful discussions with Dr. Kumar on various aspects of this work.
Appendix A. Basic axioms for fuzzy intersection
An intersection operator i used for aggregating fuzzy sets must satisfy the following axioms.
Axiom A.1. Boundary conditions: Any X ~ S (the set of alternatives) which completely satisfies all the goals must completely belong to the decision set D and vice versa, i.e.
i(1, 1 , . . . , 1) = 1, (A.1)
i (0 , 0 . . . . . 0) = 0. ( A . 2 )
Axiom A.2. Pareto-optimality: X is preferred (or is indifferent) to R ( X > pX) iff
txck(X ) >tZGk(X ) V k ~ [1 . . . . . n], (A.3)
where > p is a transitive, reflexive, and antisymmetrical relation, i.e. it induces a partial order on S.
If i is to be consistent with the statement above, then
V(a 1 . . . . . a , ) , (b 1 . . . . . bn), i f V j as>bj , then i (a 1 . . . . . an) > i ( b 1 . . . . , b , ) , (a .4)
where a i and b i ~ [0,1]. Axiom A.2 insures that a linear order induced by decision set D does not contradict the Pareto partial order, i e. if X > p.,Y, then /XD(X)>/*D(X).
Axioms A.1 and A.2 are essential for fuzzy intersection. Additional axioms that are desirable in certain applications are as follows:
A.K Dhingra, S.S. Rao /European Journal of Operational Research 83 (1995) 547-567 565
Axiom A.3. Symmetry: For a, b ~ [0,1], i f
i( a, b) = i( b, a), (A.5)
then i is commutative, or is a symmetrical function of its arguments.
Axiom A.4. Continuity: An infinitesimal change in one t~ck(X) should not induce a noticeable change in t~o(X), i.e. i is a continuous mapping.
Axiom A.5. Idempotency: For a ~ [0,1], if
i (a , a) = a, (A.6)
then i is idempotent.
Axiom A.6. AssociatMty: Operator i is associative if for a, b, c ~ [0,1],
i ( i ( a , b) , c) = i ( a , i (b , c ) ) . (A.7)
Appendix B. Fuzzy intersection theorems
Theorem B.1. For all x 1 ~ [0,1], i (x D 1) = x p
Proof. Using Axiom A.6 (Appendix A),
i ( x l , i(1, 1 ) ) = i ( i ( x D 1), 1). (B.1)
When x 1 increases from 0 to l, i(xl , 1) increases from 0 to 1 (Axioms A.1 and A.2). Since i is continuous (Axiom A.4), it follows that
VX 2 ~ [0,1], ::Ix I E [0,1] such that x 2 = i ( x 1, 1). (B.2)
Thus associativity (Axiom A.6) yields
VX 2 E [0,1], x 2 = i (x2 , 1). (B.3)
Theorem B.2. For all (xl , x 2) ~ [0,1], i(xl , x z) < min(x 1, x2).
Proof. Using Axiom A.6 and Theorem B.1,
i ( x l , i(1, 1)) = i ( i ( x x, 1), 1),
i ( X l , 1) = x 1.
By Axiom A.2,
i ( x l , x2) < i ( x l , 1).
Thus, by Theorem B.1, one gets
i ( X l , X2) -~X 1
and using Axiom A.3,
i ( x l , x2) = i (x2 , xl) ,
i (x2 , Xl) _~< i (x2 , 1) =X 2,
or,
i ( x l , x2) < min(x 1, x2).
(B.4) (B.5)
(B.6)
(B.7)
(B.8)
(B:9)
(B.IO)
566 A.K. Dhingra, S.S. Rao / European Journal of Operational Research 83 (1995) 547-567
Theorem B.2 implies that the degree of acceptability of an alternative with respect to a conjunction (intersection) of goals cannot be greater than any of the ratings of this alternative with respect to each of the goals.
Theorem B.3. The only idempotent, continuous mapping i(xl, X 2) = min(x 1, X2) , i.e., min is the only function that satisfies Axioms A.1-A.6.
Proof. See Yager (1982).
Appendix C. Fuzzy Pareto-optimality
For an MOO problem with partly crisp and partly fuzzy constraints, the concept of Pareto-optimality used for optimization problems with crisp constraints needs to be revised to introduce the concept of a fuzzy Pareto-optimal solution. This is done because the solutions differ not only with respect to associated values for objective functions, but they also differ with respect to their degree of feasibility (Zimmermann, 1985). Thus the definition of Pareto-optimality is extended as follows.
Let fi : ~n ..__> ~1 i = 1 , . . . , k, be the objective functions and/xc, : En ___> [0,1], i = 1 . . . . , p, and ~Er : ~n ---> [0,1], i = 1 . . . . . q, be the membership functions of fuzzy constraints. A solution X* ~ S is said t'o be fuzzy Pareto-optimal if and only if there exists no )~ ~ S such that
f i ( S ) ~ f i ( X * ) V i ~ [1 . . . . , k ] , (C.1)
and
/x~i(X ) >/x~i(X*) V i~ [ 1 , . . . , p ] , (C.2)
and
/x~()~) >_/zH~(X* ) V i~ [1 . . . . ,q] , (C.3)
and
or
o r
3 j ~ [1 . . . . . k] suchthat f j ( R ) < f j ( X * ) , (C.4)
X* 3 j ~ [ 1 , . . . , p ] suchthat /xc~(X)>/zcj( ), (C.5)
: t j ~ [1 , . . . , q ] suchthat /z~,j(,,Y) >/x~j(X*). (C.6)
References
Bellman, R.E., and Zadeh, L.A. (1970), "Decision making in a fuzzy environment", Management Science 17, 141-164. Dhingra, A.K., and Moskowitz, H. (1991), "Application of fuzzy theories to multiple objective decision making in system design",
European Journal of Operational Research 53, 348-361. Dhingra, A.K., Rao, S.S., and Miura, H. (1990a), "Multiobjective decision making in a fuzzy environment with applications to
helicopter design", AIAA Journal 28/4, 703-710. Dhingra, A.K,, Rao, S.S., and Miura, H. (1990b), "Pareto-optimal solutions in helicopter design problems", Engineering
Optimization 15, 211-231.
A.K. Dhingra, S.S. Rao / European Journal of Operational Research 83 (1995) 547-567 567
Dubois, D., and Prade, H. (1984), "Criteria aggregation and ranking of alternatives in the framework of fuzzy set theory", TIMS Studies in the Management Sciences 20, 209-240.
Feng, Y. (1983), "A method using the fuzzy mathematics to solve the vectormaximum problem", Fuzzy Sets and Systems 9, 129-136.
Geoffrion, A.M. (1968), "Proper efficiency and the theory of vector maximization", Journal of Mathematical Analysis and Applications 22, 618-630:
Hwang, C.L., and Masud, A.S.M. (1979), Multiple Objective Decision Making - Methods and Applications, Lecture Notes in Economics and Mathematical Systems 164, Springer-Verlag, Berlin.
Leitmann, G. (1975), "Cooperative and non-cooperative differential games", in: G. Leitmann and A. Marzollo (Eds.), Multicriteria Decision Making, Springer-Verlag, New York, 7-31.
Luce, R.D., and Raiffa, H. (1957), Games and Decisions, Wiley, New York. Nash, J.F. (1950), "The bargaining problem", Econometrica 18, 155-162. Nash, J.F. (1953), "Two person cooperative games", Econometrica 21, 128-140. Rao, S.S. (1987), "Description and optimum design of fuzzy mechanical systems", Journal of Mechanisms, Transmissions and
Automation in Design 109/1, 126-132. Rao, S.S., and Hati, S.1¢_ (1980), "Optimum design of shock and vibration isolation systems using game theory", Engineering
Optimization 4, 215-226. Saaty, T.L. (1977), "A scaling method for priorities in hierarchical structures", Journal of Mathematical Psychology 15, 234-281. von Neumann, J., and Morgenstern, O. (1947), Theory of Games and Economic Behavior, 2nd ed., Princeton University Press,
Princeton, NJ. Yager, R.R. (1982), "Some procedures for selecting fuzzy set-theoretic operators", International Journal of General Systems 8,
115-124. Zadeh, L.A. (1973), "Outline of a new approach to the analysis of complex systems and decision processes", 1EEE Transactions on
Systems, Man, and Cybernetics 3, 28-44 Zimmermann, H.J. (1985), Fuzzy Set Theory and Its Applications, Kluwer-Nijhoff, Boston,/VIA.