a cooperative framework for segmentation of mri brain scans
TRANSCRIPT
1
A Cooperative Framework for Segmentation of MRI Brain Scans
Laurence Germonda, Michel Dojatb, C. Taylorc, C. Garbaya
aLaboratoire TIMC-IMAG, Institut Bonniot, Faculté de Médecine, Domaine dela Merci, 38706 La Tronche Cedex, FrancebInstitut National de la Santé et de la Recherche Médicale, U438 - RMNBioclinique, Centre Hospitalier Universitaire - Pavillon B, BP 217, 38043Grenoble Cedex 9, FrancecDepartment of Medical Biophysics, University of Manchester, StopfordBuilding, Oxford Road, Manchester M139PT, England
Address for correspondence: M. Dojat
INSERM U438 - RMN Bioclinique
Centre Hospitalier Universitaire - Pavillon B BP217, 38043 Grenoble Cedex 9 FRANCE
phone: 33 4 76 76 57 48
fax: 33 4 76 76 58 96
email: [email protected]
2
Abstract:
Automatic segmentation of MRI brain scans is a complex task for two
main reasons: the large variability of the human brain anatomy, which limits
the use of general knowledge and, inherent to MRI acquisition, the artifacts
present in the images that are difficult to process. To tackle these difficulties we
propose to mix, in a cooperative framework, several types of information and
knowledge provided and used by complementary individual systems:
presently, a multi-agent system, a deformable model and an edge detector. The
outcome is a cooperative segmentation performed by a set of region and edge
agents constrained automatically and dynamically by both, the specific gray
levels in the considered image, statistical models of the brain structures and
general knowledge about MRI brain scans. Interactions between the individual
systems follow three modes of cooperation: integrative, augmentative and
confrontational cooperation, combined during the three steps of the
segmentation process namely, the specialization of the seeded-region-growing
agents, the fusion of heterogeneous information and the retroaction over slices.
The described cooperative framework allows the dynamic adaptation of the
segmentation process to the own characteristics of each MRI brain scan. Its
evaluation using realistic brain phantoms is reported.
Keywords: Multi-agent system, Cerebral Cortex, Active Shape Model.
3
1. INTRODUCTION
The development of reliable methods of segmentation is a central
prerequisite to exploit in deep information contained in Magnetic Resonance
Imaging (MRI) brain scans. In particular, the functional organization of the
cortical areas, as assessed by functional brain imaging, can only be visualized
and understood with a precise delineation of the cortical ribbon. Automated
procedures for the accurate cortex delineation rely on the precise segmentation
of the brain tissues. The automatic segmentation of MR images is a complex
task for two main reasons: the inter-subject variability of the human brain
anatomy that restricts the use of general knowledge and, inherent to the
acquisition process, image artifacts that are difficult to correct, such as partial
volume effects and non uniformity of the gray level intensities for a given
tissue, essentially due to inhomogenities of the excitation pulse (radio-
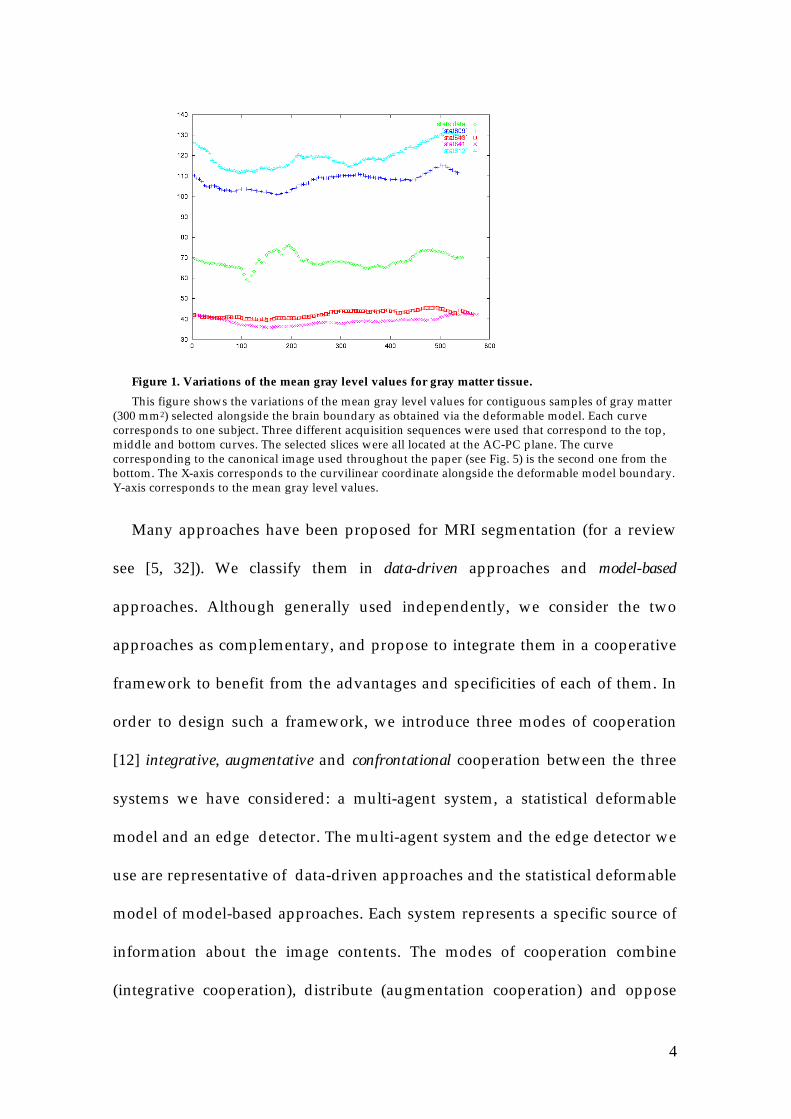
frequency field). As an example, the non-uniformity of the gray levels for gray
matter tissue (GM), within and between images, is shown on Figure 1. The
importance of these gray level variations motivates the use of an adaptative
segmentation process.
4
Figure 1. Variations of the mean gray level values for gray matter tissue.
This figure shows the variations of the mean gray level values for contiguous samples of gray matter(300 mm2) selected alongside the brain boundary as obtained via the deformable model. Each curvecorresponds to one subject. Three different acquisition sequences were used that correspond to the top,middle and bottom curves. The selected slices were all located at the AC-PC plane. The curvecorresponding to the canonical image used throughout the paper (see Fig. 5) is the second one from thebottom. The X-axis corresponds to the curvilinear coordinate alongside the deformable model boundary.Y-axis corresponds to the mean gray level values.
Many approaches have been proposed for MRI segmentation (for a review
see [5, 32]). We classify them in data-driven approaches and model-based
approaches. Although generally used independently, we consider the two
approaches as complementary, and propose to integrate them in a cooperative
framework to benefit from the advantages and specificities of each of them. In
order to design such a framework, we introduce three modes of cooperation
[12] integrative, augmentative and confrontational cooperation between the three
systems we have considered: a multi-agent system, a statistical deformable
model and an edge detector. The multi-agent system and the edge detector we
use are representative of data-driven approaches and the statistical deformable
model of model-based approaches. Each system represents a specific source of
information about the image contents. The modes of cooperation combine
(integrative cooperation), distribute (augmentation cooperation) and oppose
5
(confrontational cooperation) different solutions to a given problem.
Cooperation is used at each step of the segmentation process namely:
specialization of refine seeded-region-growing agents, fusion of heterogeneous
information and retraction over slices.
• The specialization step, based on integrative and augmentative
cooperation, customizes two sets of specialized agents that segment
successively gray matter and white matter (WM). In addition to general
knowledge about brain anatomy and brain scans, the statistical 2D deformable
model provides valuable information on the brain boundary to position the
GM agents that allow eventually the localization of WM agents.
• The fusion step relies on augmentative and confrontational cooperation. It
leads to the refinement of the detection of the brain boundary from both the
region classification obtained via the multi-agent system and the edge
detection provided by the edge detector. The refinement process is based on
several specific agents working concurrently along the brain boundary.
• The retroaction step uses integrative and confrontational cooperation. It
allows the improvement of the current segmentation and the transmission of
information to initialize the segmentation of contiguous slices. Although, we
use a 2D deformable model, this step achieves a 2.5D segmentation.
In the remainder of the paper, we briefly present in section 2 a state of the art
on MRI brain scans segmentation. We detail, in section 3, the different systems
currently present in our framework. Section 4 describes the complete
segmentation process to enlighten the three modes of cooperation we propose.
6
Section 5 is devoted to the evaluation of the system performance in using
phantoms provided by the Montreal Neurological Institute (MNI). Then, in
section 6 we discuss several aspects of our work for segmentation of MRI brain
scans and point out work under development.
2. STATE OF THE ART
We separate the numerous approaches proposed in the literature in two
main categories depending whether they use models (model-based
approaches) or mainly the gray levels present in the images (data-driven
approaches). We note that accordingly to this categorization, region-based
classification techniques rather use local models (data-driven approaches) and
implicit or explicit knowledge, whilst edge-based detection methods rely on
global models and implicit knowledge.
2.1. DATA DRIVEN APPROACHES
Classification processes, such as bayesian classification or Markov
random fields, are the main representative of data-driven approaches. They
have been widely used for region segmentation and interpretation of cerebral
tissues [11, 14, 17, 23, 31]. These approaches can be used to provide volume
measurements of the brain tissues, pixel labeling and also research of areas of
interest. The main difficulties encountered in using these approaches come
from the artifacts inherent to the image acquisition procedure. Specific
preprocessing techniques have been proposed [22, 26] to cope with the non
uniformity of the gray level intensities for a given tissue that is a critical point
7
in these approaches. Moreover, a preprocessing step is also often required to
isolate the brain and lower the number of classes to detect. Due to the local and
systematic nature of the treatments used, these approaches are easily
extendable in 3D.
2.2. MODEL-BASED APPROACHES
Modeling is mainly related to the introduction of a priori information or
knowledge about edges and brain structures. Models provide a robust
localization of the structures of interest without requiring a preprocessing step.
Among the set of model-based approaches, we can quote those based on
snakes [4, 9, 10, 21, 24] and those based on a statistical processing of a training
images set [7, 27, 29]. Models use global constraints that limit their deformation
capability and thus their ability to describe local deformations. As a
consequence, some structures present in brain images, highly variable in shape,
appearance and topology, are difficult to model with a sufficient precision to
be useful. The design of 3D models is a challenging task since the majority of
current available models are built in 2D.
2.3. COOPERATIVE APPROACHES
In front of the complexity of MRI brain scans segmentation, several
approaches have been proposed [15, 28, 30] to combine several autonomous
modules, each responsible of a part of the task. Although the method obtained
is more robust than its individual components, the cooperation between the
modules is still embryonic: each sub-task is performed sequentially and its
result is used to feed the following sub-task. Following [2], we propose to use
8
more fully the concept of cooperation, thus taking advantage of the
complementary of different systems for the generation of constraints and
information exploited by each system. We have studied three modes of
cooperation to facilitate the integration of heterogeneous sources of
information, i.e. anatomical information provided by model-based approaches,
and self-contained image information provided by data-driven based
approaches. We assume that a framework based on the multi-agent paradigm
is well adapted to operationalize these modes of cooperation.
3. THE INDIVIDUAL SYSTEMS
Three individual systems are currently used in our framework, which
generate and use different types of information and knowledge (Figure 2).
• The multi-agent system that segments MRI scans, is composed of seeded-
region-growing and edge detection autonomous entities called agents. It has a
pivotal role in our framework, the other systems playing the role of
information providers via our cooperation modes. It processes local gray level
information through a priori domain knowledge and a statistical model whose
parameters are acquired at run time.
• The deformable model provides spatial and topological information based
on an off-line learned statistical model adaptable to the image to segment.
• The edge detector provides edges based on gray level intensity
information and a priori domain knowledge.
9
Deformable Model
Region Agent
Edge Agent
Multi-agent System
Speciali-zation
Fusion
Retro-action
Edge Detector
edgeregion
refinedenveloppe
Tc2
Tc1
Cc1-2
enveloppe
integrative & augmentative
augmentative & confrontational
integrative & confrontational
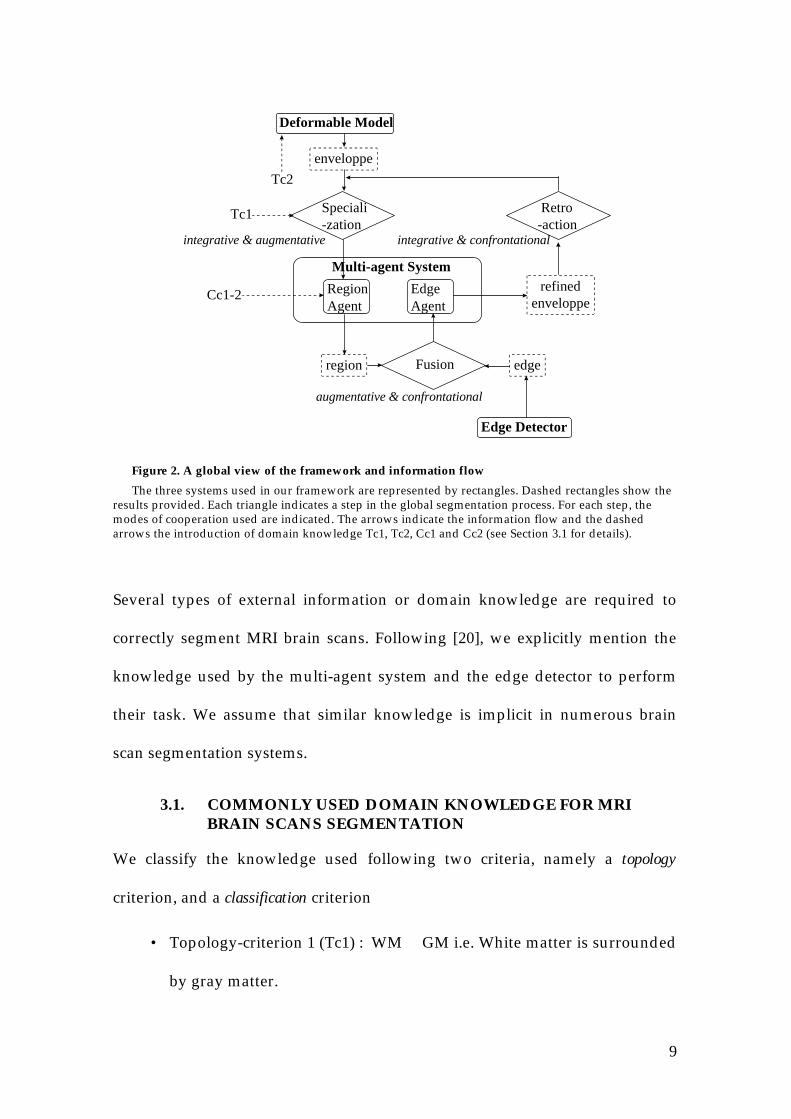
Figure 2. A global view of the framework and information flow
The three systems used in our framework are represented by rectangles. Dashed rectangles show theresults provided. Each triangle indicates a step in the global segmentation process. For each step, themodes of cooperation used are indicated. The arrows indicate the information flow and the dashedarrows the introduction of domain knowledge Tc1, Tc2, Cc1 and Cc2 (see Section 3.1 for details).
Several types of external information or domain knowledge are required to
correctly segment MRI brain scans. Following [20], we explicitly mention the
knowledge used by the multi-agent system and the edge detector to perform
their task. We assume that similar knowledge is implicit in numerous brain
scan segmentation systems.
3.1. COMMONLY USED DOMAIN KNOWLEDGE FOR MRIBRAIN SCANS SEGMENTATION
We classify the knowledge used following two criteria, namely a topology
criterion, and a classification criterion
• Topology-criterion 1 (Tc1) : WM ∈ GM i.e. White matter is surrounded
by gray matter.
10
• Topology-criterion 2 (Tc2) : If dst(p, Model) ≤ 2 Then p ∈ GM | CSF
GM can be modeled as a ribbon of approximately 2 mm width. Thus, if a pixel
p, (1 mm2 with the resolution used) is less than two pixels far from the model
boundary, it belongs to either GM or cerebro-spinal fluid (CSF).
• Classification-criterion 1 (Cc1): E/M{Matter} ⇒ {sup(GM), mean(WM}
where Matter = {GM, WM}
We consider that the Estimation/Maximisation (E/M) algorithm on three
classes is sufficient to calculate the higher value of GM i.e. sup(GM) and the
mean of WM i.e. mean(WM).
• Classification-criterion 2 (Cc2) : If p ∈ GM Then I(p) < mean(WM)
If p ∈ WM Then I(p) > sup(GM)
where I(p) is the gray-level of pixel p in the image. This criterion depends on
the image acquisition parameters and is valid for the T1 weighted acquisition
sequence we use.
3.2. THE MULTI-AGENT SYSTEM
Presently, two classes of agents have been defined: region agents
specialized for GM or for WM segmentation and edge agents specialized for
the brain boundary detection (Figure 3). The agents are autonomous and
simple entities implemented as C++ objects, which communicate through a
shared environment and are concurrently executed under control of a
scheduler. RegionAgent class allows the definition of the initial localization in
the image (seed) and the behavior (parameterSpecialization) of pixel growing
11
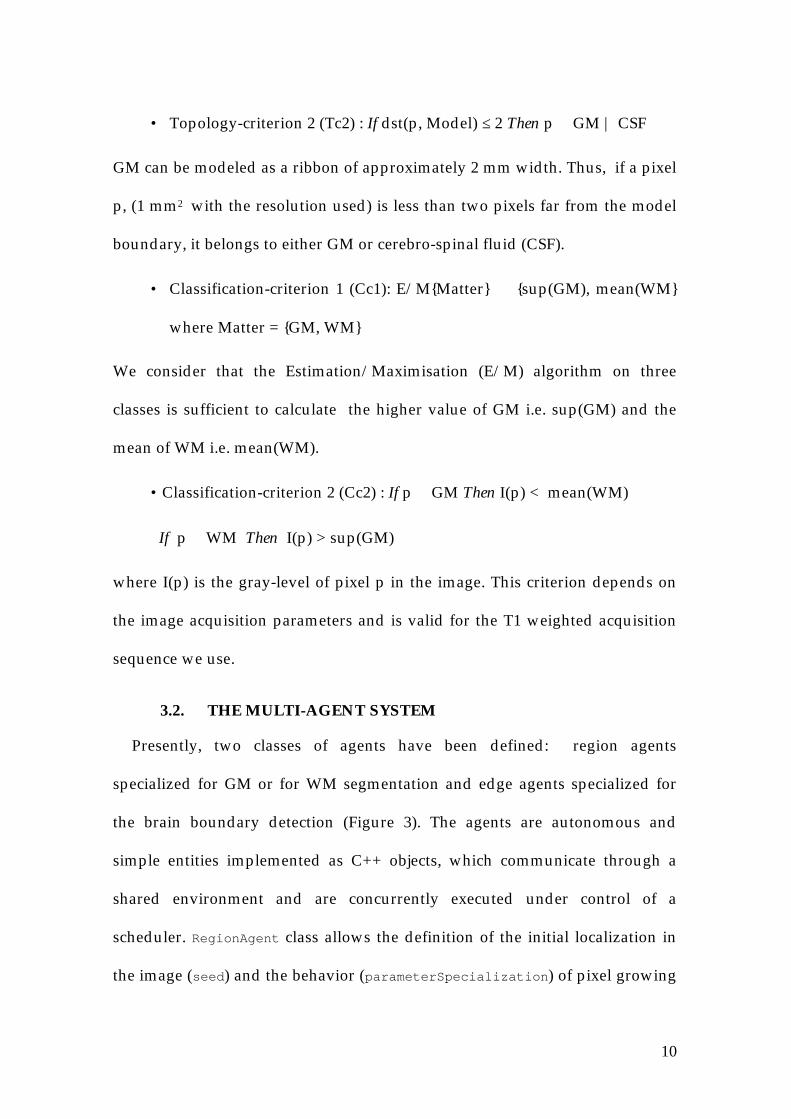
agents. EdgeAgent class implies the specification of the bounds (bounds) of the
edge and the parameters of the cost function (costFunction). Each agent is
locally specialized and initialized at runtime (see Section 4).
Agent ClassidentificationNumber
allocationTime
RegionAgent Classseed, pixelCandidates
parametersOfSpecialization
EdgeAgent Classbounds
costFunction
Figure 3. Agents hierarchy
Three agent classes compose the hierarchy that are linked by means of isa relation (arrows). Theinstance variables for each class are indicated.
3.3. THE DEFORMABLE MODEL
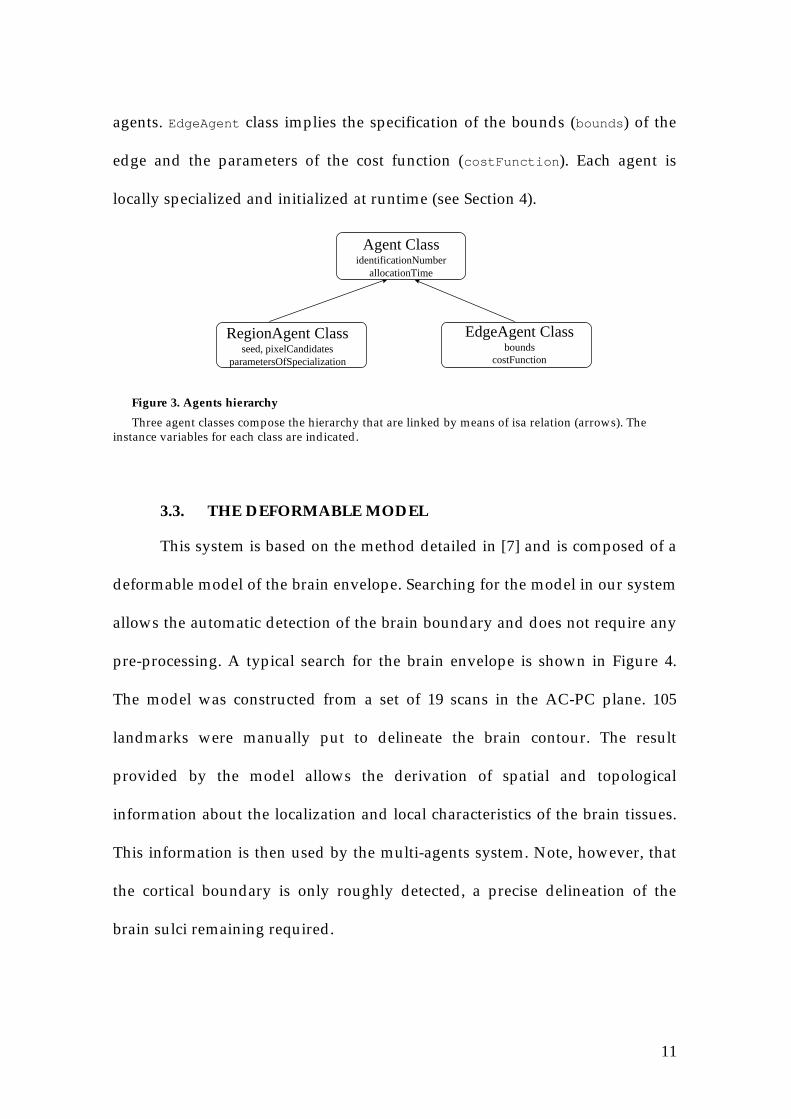
This system is based on the method detailed in [7] and is composed of a
deformable model of the brain envelope. Searching for the model in our system
allows the automatic detection of the brain boundary and does not require any
pre-processing. A typical search for the brain envelope is shown in Figure 4.
The model was constructed from a set of 19 scans in the AC-PC plane. 105
landmarks were manually put to delineate the brain contour. The result
provided by the model allows the derivation of spatial and topological
information about the localization and local characteristics of the brain tissues.
This information is then used by the multi-agents system. Note, however, that
the cortical boundary is only roughly detected, a precise delineation of the
brain sulci remaining required.
12
Figure 4. Automatic detection of the brain envelope.
The figure indicates the final position of the model after deformation to fit to the characteristics of thenew image not present in the initial training set.
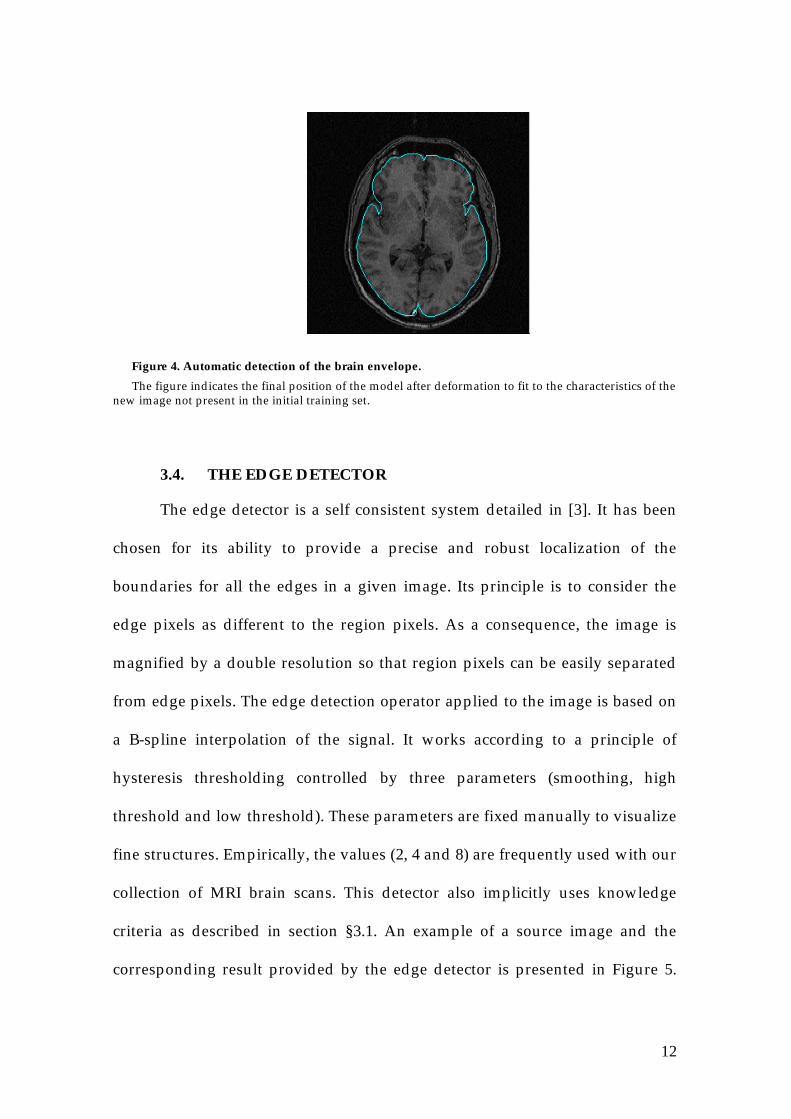
3.4. THE EDGE DETECTOR
The edge detector is a self consistent system detailed in [3]. It has been
chosen for its ability to provide a precise and robust localization of the
boundaries for all the edges in a given image. Its principle is to consider the
edge pixels as different to the region pixels. As a consequence, the image is
magnified by a double resolution so that region pixels can be easily separated
from edge pixels. The edge detection operator applied to the image is based on
a B-spline interpolation of the signal. It works according to a principle of
hysteresis thresholding controlled by three parameters (smoothing, high
threshold and low threshold). These parameters are fixed manually to visualize
fine structures. Empirically, the values (2, 4 and 8) are frequently used with our
collection of MRI brain scans. This detector also implicitly uses knowledge
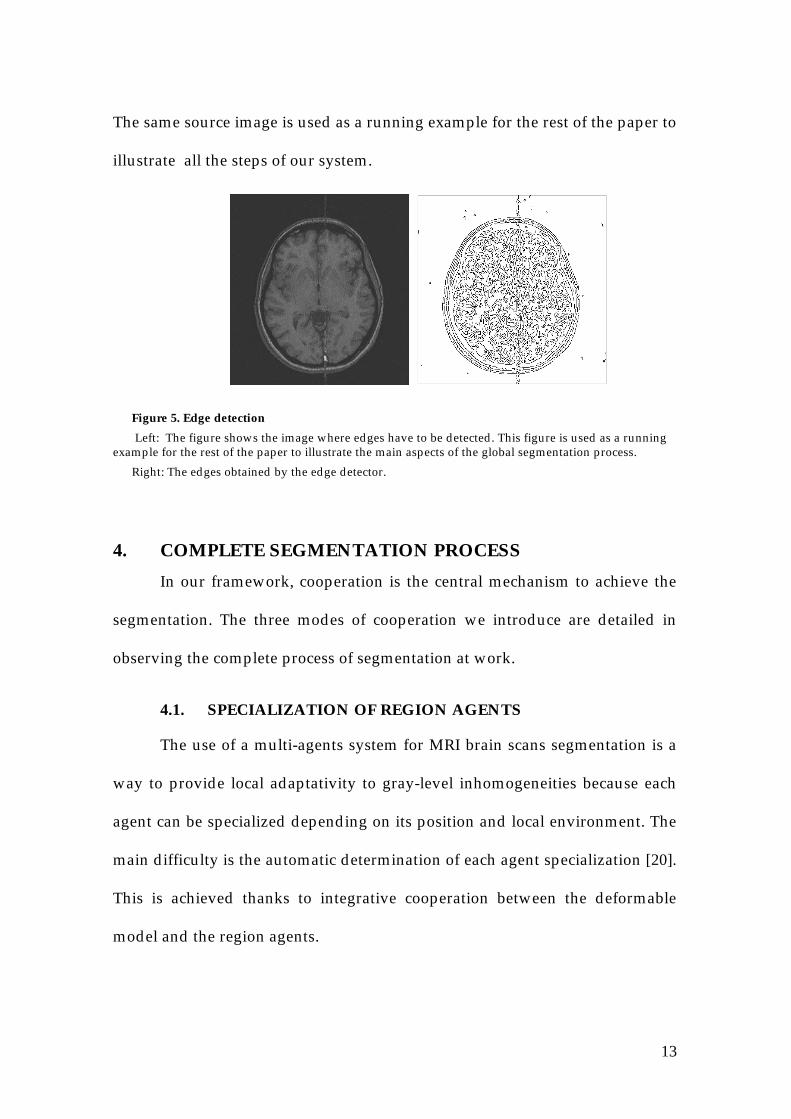
criteria as described in section §3.1. An example of a source image and the
corresponding result provided by the edge detector is presented in Figure 5.
13
The same source image is used as a running example for the rest of the paper to
illustrate all the steps of our system.
Figure 5. Edge detection
Left: The figure shows the image where edges have to be detected. This figure is used as a runningexample for the rest of the paper to illustrate the main aspects of the global segmentation process.
Right: The edges obtained by the edge detector.
4. COMPLETE SEGMENTATION PROCESS
In our framework, cooperation is the central mechanism to achieve the
segmentation. The three modes of cooperation we introduce are detailed in
observing the complete process of segmentation at work.
4.1. SPECIALIZATION OF REGION AGENTS
The use of a multi-agents system for MRI brain scans segmentation is a
way to provide local adaptativity to gray-level inhomogeneities because each
agent can be specialized depending on its position and local environment. The
main difficulty is the automatic determination of each agent specialization [20].
This is achieved thanks to integrative cooperation between the deformable
model and the region agents.
14
4.1.1. DETERMINATION OF THE AGENT POSITION
The position and number of GM agents are automatically constrained from
the detection of the brain boundary by the deformable model. The principle is
to place an agent every n1 pixels alongside the brain boundary and to move
towards the inside of the brain, in a direction normal to the local boundary, for
a distance of n2 pixels. In our current application, n1 and n2 are equal to 5 and 2
respectively and, based on the domain knowledge Tc2 (see §3.1), we assume
that the selected pixels are in GM. The position of the WM agents is defined
after GM segmentation. This allows the definition of an area of interest located
inside the boundary of the brain detected by the deformable model and not in
previously segmented GM (domain knowledge Tc1, §3.1). In this area, we have
adopted a systematic principle of positioning: one agent every n3 pixels
alongside both directions of the image. n3 is set to 10 in the current application.
For GM agents as well as for the WM agents, criteria Cc1 and Cc2 (see §3.1)
allow the control of the validity of each selected agent position. The unreliable
agents are suppressed. Following the augmentative cooperation, the region
segmentation task is distributed to the set of GM and WM agents. Each agent,
locally adapted to a sub-part of the image, processes at best its partial task of
segmentation. Due to their concurrent launching, each agent is constrained at
run-time by the agent working in its neighborhood. The pixel classification is
based on a first-come first-served principle.
4.1.2. DETERMINATION OF THE AGENT BEHAVIOR
The behavior of seeded-region-growing agents is determined by two
parameters (σi, µi). The pixels candidates for aggregation to the region under
15
construction are selected at the current region border in 4-connexity and must
verify equation (1) where Ip represents the gray-level of pixel p and α is a fixed
coefficient, currently set to 1.5.
µi -σi x α ≤ I(p) ≤ µi + σi x α (1)
In order to calculate automatically (σi, µi), samples of tissue are selected and
processed following the criterion Sc1 :
• Sampling-criterion 1 (Sc1): size(Window{GM}) = 100*3 pixels
For each gray-matter agent, we select a band of 100 pixels length and 3 pixels
width (i.e. 300 mm2) to perform a local E/M on the gray-levels for both CSF
and GM (domain knowledge Tc2, §3.1). The mean and the variance of the
gaussian curve with the highest mean (domain knowledge Cc2, §3.1) is used to
define the behavior of the considered agent.
For the white matter agents, the criterion Sc2 is used:
• Sampling-criterion 2 (Sc2) : size(Window{WM}) = 9*9 pixels
For each white-matter agent, we select a square sample of 9*9 pixels (i.e. 81
mm2) to calculate the local mean and variance of the white matter. Only the
non segmented pixels are considered and the mean and the variance of the
resulting sample is used to define the behavior of the corresponding WM
agent.
4.2. FUSION OF INFORMATION
Based on the use of global constraints, the boundary determined by the
deformable model is not accurate enough to describe variable structures such
16
as convolutions or sulci openings. Consequently, the delineation of GM/CSF
border performed by the multi-agent system can also be partly erroneous. The
goal of this step is to build a more precise brain contour based on augmentative
and confrontational cooperation between the multi-agent system and the edge
detector. A new edgeAgent class is defined for this purpose, in using
complementary information about regions provided by the multi-agent system
and about edges provided by the edge detector.
4.2.1. EDGE AGENTS
The definition of the edge agents has been guided by two requirements:
• Conservation of the topology of the boundary detected by the deformable
model (closed boundary).
• Confrontation of information acquired in previous stages by the two
independent information sources.
To fit these requirements, a dynamic programming approach (A* algorithm) is
used to define the behavior of this agent class. Accordingly to this behavior, the
edge agents search for the best path between two extremities placed on the
brain boundary as assessed by the deformable model. This guaranties the
topology conservation. The cost function allows the search for an optimal path
between the two extremities.
4.2.2. COHERENCE OF THE INFORMATION SOURCES
To be confronted the two information sources have to be coherent. The
coherence is approximately correct as shown in Figure 6 where edges are
mainly located at the region borders. However, it can be observed that regions
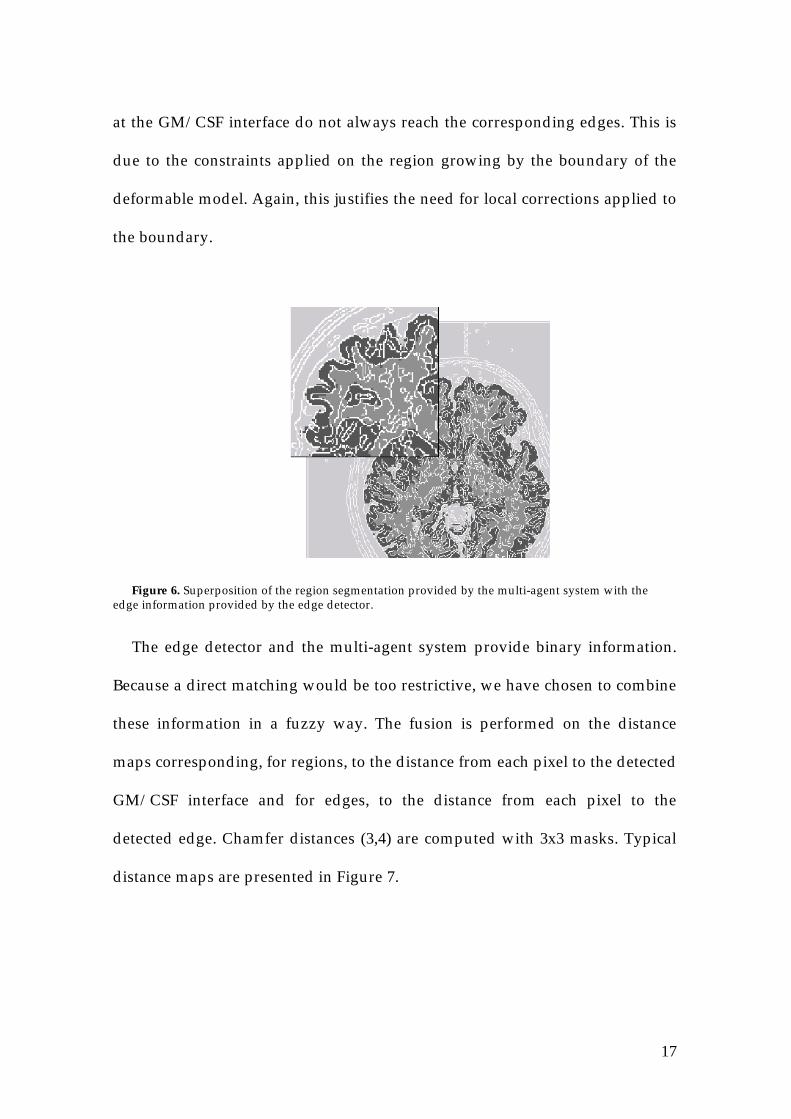
17
at the GM/CSF interface do not always reach the corresponding edges. This is
due to the constraints applied on the region growing by the boundary of the
deformable model. Again, this justifies the need for local corrections applied to
the boundary.
Figure 6. Superposition of the region segmentation provided by the multi-agent system with theedge information provided by the edge detector.
The edge detector and the multi-agent system provide binary information.
Because a direct matching would be too restrictive, we have chosen to combine
these information in a fuzzy way. The fusion is performed on the distance
maps corresponding, for regions, to the distance from each pixel to the detected
GM/CSF interface and for edges, to the distance from each pixel to the
detected edge. Chamfer distances (3,4) are computed with 3x3 masks. Typical
distance maps are presented in Figure 7.
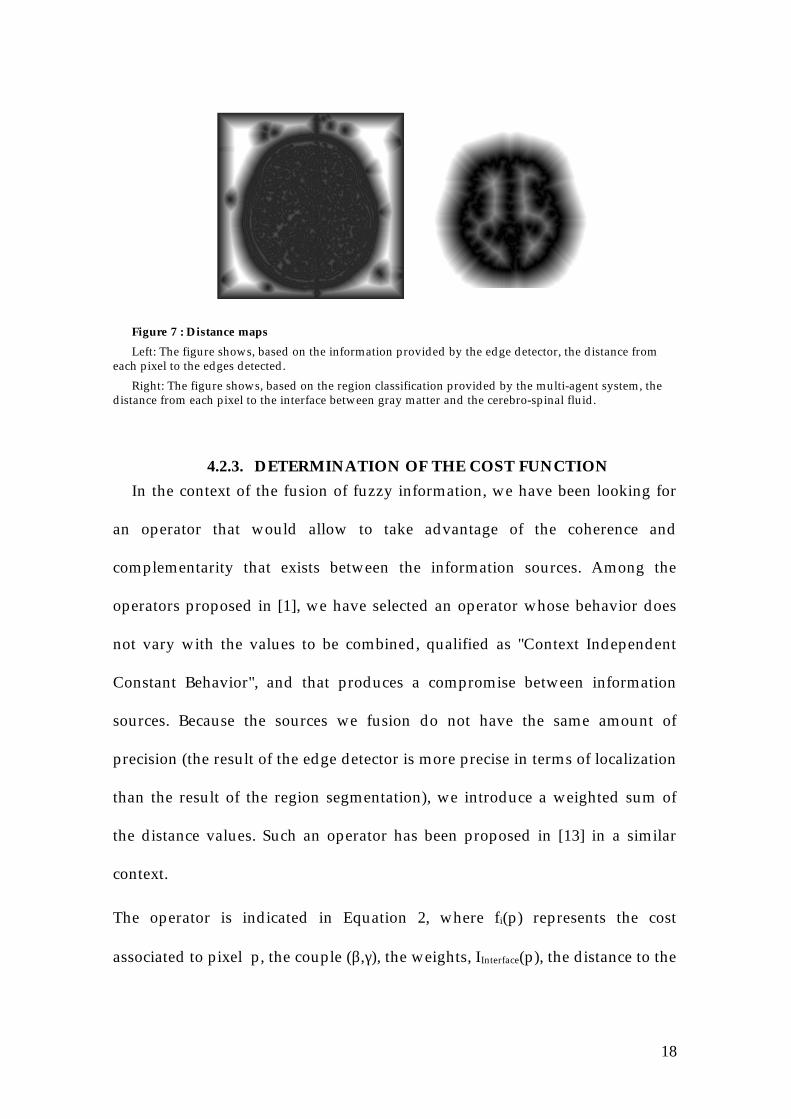
18
Figure 7 : Distance maps
Left: The figure shows, based on the information provided by the edge detector, the distance fromeach pixel to the edges detected.
Right: The figure shows, based on the region classification provided by the multi-agent system, thedistance from each pixel to the interface between gray matter and the cerebro-spinal fluid.
4.2.3. DETERMINATION OF THE COST FUNCTION
In the context of the fusion of fuzzy information, we have been looking for
an operator that would allow to take advantage of the coherence and
complementarity that exists between the information sources. Among the
operators proposed in [1], we have selected an operator whose behavior does
not vary with the values to be combined, qualified as "Context Independent
Constant Behavior", and that produces a compromise between information
sources. Because the sources we fusion do not have the same amount of
precision (the result of the edge detector is more precise in terms of localization
than the result of the region segmentation), we introduce a weighted sum of
the distance values. Such an operator has been proposed in [13] in a similar
context.
The operator is indicated in Equation 2, where fi(p) represents the cost
associated to pixel p, the couple (β,γ), the weights, IInterface(p), the distance to the
19
GM/CSF interface based on region segmentation, and IEdge(p) the distance to
the edge provided by the edge detector.
fi(p) = (βIInterface(p) + γ IEdge(p)) /(β+γ) (2)
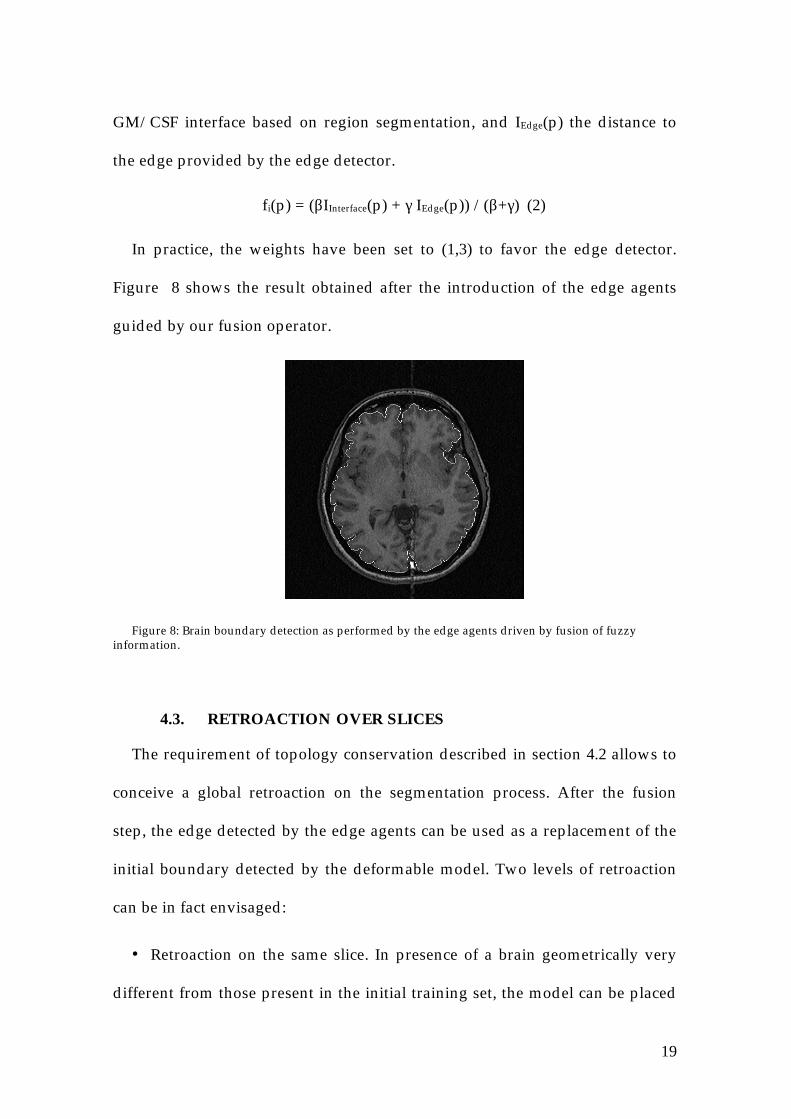
In practice, the weights have been set to (1,3) to favor the edge detector.
Figure 8 shows the result obtained after the introduction of the edge agents
guided by our fusion operator.
Figure 8: Brain boundary detection as performed by the edge agents driven by fusion of fuzzyinformation.
4.3. RETROACTION OVER SLICES
The requirement of topology conservation described in section 4.2 allows to
conceive a global retroaction on the segmentation process. After the fusion
step, the edge detected by the edge agents can be used as a replacement of the
initial boundary detected by the deformable model. Two levels of retroaction
can be in fact envisaged:
• Retroaction on the same slice. In presence of a brain geometrically very
different from those present in the initial training set, the model can be placed
20
inside the real boundary. In such a case, some GM pixels are missed. The
retroaction on the same slice detects those pixels to refine the initial contour.
This step uses confrontational cooperation: the initial model-based information
is replaced by the newly computed one, judged more accurate.
• Retroaction on an adjacent slice in the image volume. Currently we do not
dispose of a 3D statistical deformable model. To overcome the intrinsic 2D
limitation, we exploit the capacities of our system to propagate information to
adjacent slices in the image volume. Following the detection of the brain
boundary by the edge agents at a given level in the image volume, and after at
least one retroaction on the same slice, we can transmit the delineated brain
contour to an adjacent slice. This brain contour is then used to start the
segmentation process for this new slice, instead of the one provided by the
deformable model, that was built from a set of slices at another plane level. The
hypothesis is that the brain geometry is almost constant on adjacent slices. A
similar principle of information transmission has been proposed in [15] to
successively initialize snakes through an image volume. This step uses the
integrative cooperation: a newly computed information is transmitted to
constraint the next steps of the global segmentation process.
5. EVALUATION
Because it is impossible to establish ground truth with real images, we
have used, to perform an accurate evaluation of our framework, the realistic
digital brain phantom provided by the Montréal Neurologic Institute
21
(http://www.bic.mni.mcgill.ca/brainweb) and largely used for validation
purposes [6].
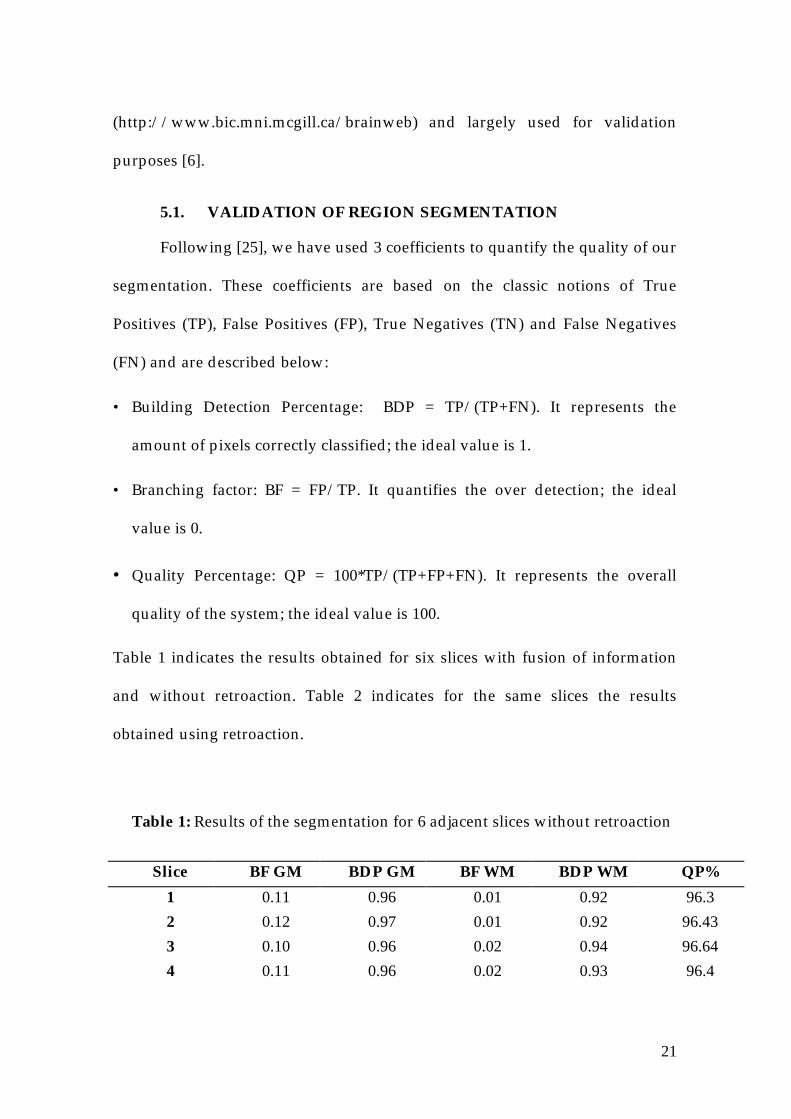
5.1. VALIDATION OF REGION SEGMENTATION
Following [25], we have used 3 coefficients to quantify the quality of our
segmentation. These coefficients are based on the classic notions of True
Positives (TP), False Positives (FP), True Negatives (TN) and False Negatives
(FN) and are described below:
• Building Detection Percentage: BDP = TP/(TP+FN). It represents the
amount of pixels correctly classified; the ideal value is 1.
• Branching factor: BF = FP/TP. It quantifies the over detection; the ideal
value is 0.
• Quality Percentage: QP = 100*TP/(TP+FP+FN). It represents the overall
quality of the system; the ideal value is 100.
Table 1 indicates the results obtained for six slices with fusion of information
and without retroaction. Table 2 indicates for the same slices the results
obtained using retroaction.
Table 1: Results of the segmentation for 6 adjacent slices without retroaction
Slice BF GM BDP GM BF WM BDP WM QP%
1 0.11 0.96 0.01 0.92 96.3
2 0.12 0.97 0.01 0.92 96.43
3 0.10 0.96 0.02 0.94 96.64
4 0.11 0.96 0.02 0.93 96.4
22
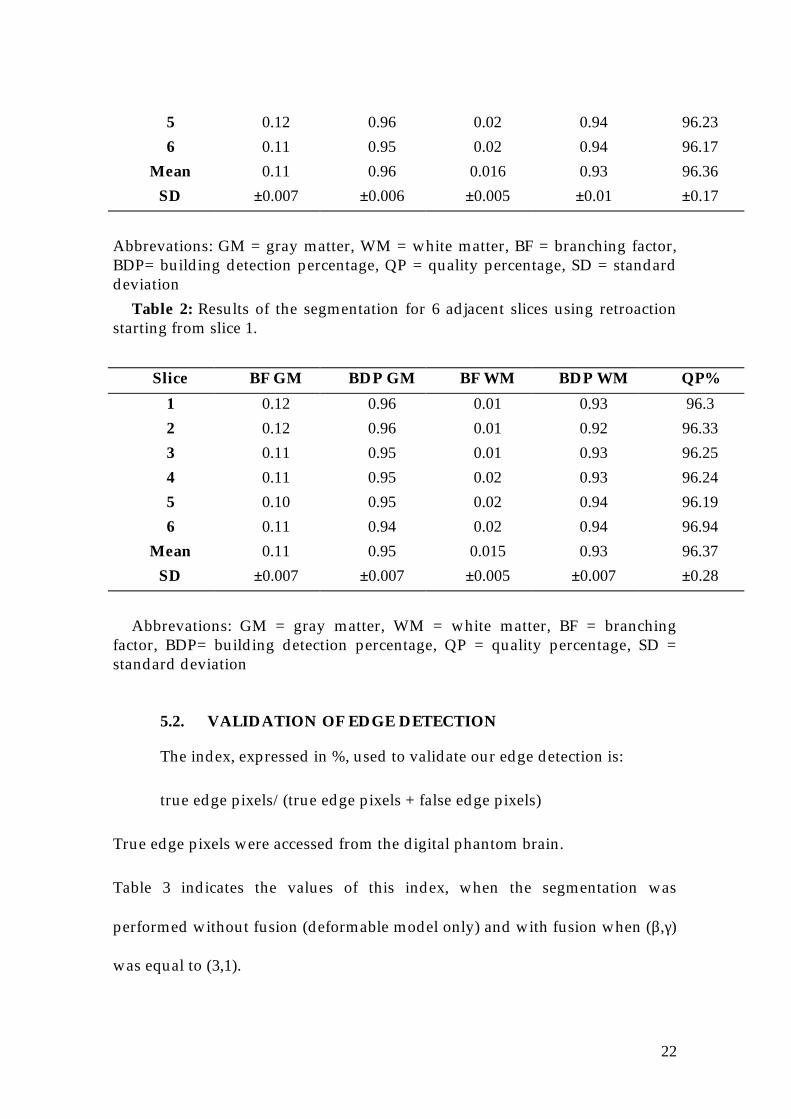
5 0.12 0.96 0.02 0.94 96.23
6 0.11 0.95 0.02 0.94 96.17
Mean 0.11 0.96 0.016 0.93 96.36
SD ±0.007 ±0.006 ±0.005 ±0.01 ±0.17
Abbrevations: GM = gray matter, WM = white matter, BF = branching factor,BDP= building detection percentage, QP = quality percentage, SD = standarddeviation
Table 2: Results of the segmentation for 6 adjacent slices using retroactionstarting from slice 1.
Slice BF GM BDP GM BF WM BDP WM QP%
1 0.12 0.96 0.01 0.93 96.3
2 0.12 0.96 0.01 0.92 96.33
3 0.11 0.95 0.01 0.93 96.25
4 0.11 0.95 0.02 0.93 96.24
5 0.10 0.95 0.02 0.94 96.19
6 0.11 0.94 0.02 0.94 96.94
Mean 0.11 0.95 0.015 0.93 96.37
SD ±0.007 ±0.007 ±0.005 ±0.007 ±0.28
Abbrevations: GM = gray matter, WM = white matter, BF = branchingfactor, BDP= building detection percentage, QP = quality percentage, SD =standard deviation
5.2. VALIDATION OF EDGE DETECTION
The index, expressed in %, used to validate our edge detection is:
true edge pixels/(true edge pixels + false edge pixels)
True edge pixels were accessed from the digital phantom brain.
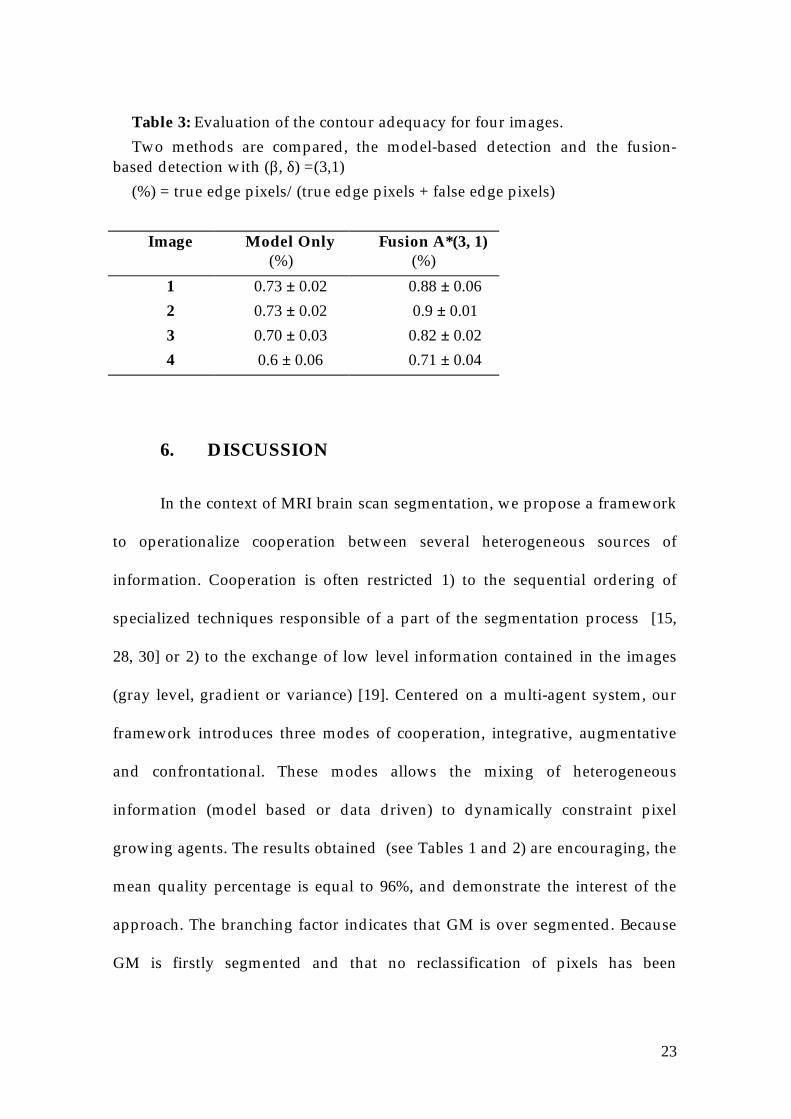
Table 3 indicates the values of this index, when the segmentation was
performed without fusion (deformable model only) and with fusion when (β,γ)
was equal to (3,1).
23
Table 3: Evaluation of the contour adequacy for four images.
Two methods are compared, the model-based detection and the fusion-based detection with (β, δ) =(3,1)
(%) = true edge pixels/(true edge pixels + false edge pixels)
Image Model Only(%)
Fusion A*(3, 1)(%)
1 0.73 ± 0.02 0.88 ± 0.06
2 0.73 ± 0.02 0.9 ± 0.01
3 0.70 ± 0.03 0.82 ± 0.02
4 0.6 ± 0.06 0.71 ± 0.04
6. DISCUSSION
In the context of MRI brain scan segmentation, we propose a framework
to operationalize cooperation between several heterogeneous sources of
information. Cooperation is often restricted 1) to the sequential ordering of
specialized techniques responsible of a part of the segmentation process [15,
28, 30] or 2) to the exchange of low level information contained in the images
(gray level, gradient or variance) [19]. Centered on a multi-agent system, our
framework introduces three modes of cooperation, integrative, augmentative
and confrontational. These modes allows the mixing of heterogeneous
information (model based or data driven) to dynamically constraint pixel
growing agents. The results obtained (see Tables 1 and 2) are encouraging, the
mean quality percentage is equal to 96%, and demonstrate the interest of the
approach. The branching factor indicates that GM is over segmented. Because
GM is firstly segmented and that no reclassification of pixels has been
24
introduced, WM is then under segmented. During the retroaction process, the
transmission of information is reliable (see Table 2). However, due to the
efficiency of the 2D statistical deformable model, the interest of the retroaction
is not demonstrated here.
The design of this model requires considerable user intervention with
the manual placement of landmarks on the brain contours that constitute the
training set. Its extension in 3D raises theoretical problems. Techniques based
on morphological operations, less powerful but sufficient for a roughly brain
contour isolation, could advantageously replaced the deformable model. In this
case, retroaction could be an efficient technique to refine the initial contour.
The fusion operator, which favors non interpreted information provided by the
edge detector, improves the edge detection compared to the use of the
deformable model only (see Table 3). This directly demonstrates the benefit of
the confrontational mode of cooperation. In preliminary experiences, GM and
WM agents were launched in the image without topological constraints and
poor results were obtained. The integrative mode of cooperation between the
deformable model and the multi-agents system was central for the
improvement of the segmentation process. Finally, for the augmentative mode
of cooperation, an optimal relatively stable number of agents should be
introduced over which no gain is obtained.
Clearly, each individual component we currently integrate in our
framework can be improved. The choice of the Estimation/Maximization
algorithm for the calculation of the behavior of each agent is not fully
25
satisfying. Thanks to the modular construction of the framework, more
sophisticated statistical methods could be easily introduced and tested.
The behavior of the edge agents is based on the A* algorithm to
maintain a topology of closed boundary during the retroaction process.
Contrary to the deformable model, these agents are not constrained by global
deformations and then are more capable of delineating brain convolutions. No
rigidity constraints are applied as it is the case with snakes, energy-minimizing
elastic curves efficient to localize edges [16]. However, their extension in 3D is
problematic. Approaches for 3D brain structures modeling [18, 24] could be
explored.
Currently, agents communicate via shared memory. To reinforce the
cooperation, direct synchronous or asynchronous communication between the
agents have to be introduced. Interactions between agents are useful to
dynamically control the segmentation process and to take into account of the
partial volume effects inherent to MRI acquisition. The segmentation of gray
matter and white matter could then be performed concurrently, instead of
sequentially, lowering over and under segmentation by dynamic confrontation
of agents results. Note that contrary to our approach, some authors [8, 28]
choose, essentially for topological reasons and homogeneity of WM compared
to GM, to firstly segment WM and then start the GM segmentation on the
surface of the WM.
To conclude, the next step of our work is the extension of the framework
to 3D segmentation in a fully distributed environment.
26
ACKNOWLEDGMENTS: Laurence Germond has a PhD grant from the
French Ministry of Research and Technology. Financial support from the
European Commission (ALLIANCE project) is gratefully acknowledged. We
wish to thank Professor Alain Chehikian for his stimulating advice and for
providing us with his software for edge detection.
7. REFERENCES
[1] Bloch I. Information combination operators for data fusion: A comparative
review with classification, IEEE Trans. Systems, Man, Cybernetics. 1996;26:52-
67.
[2] Bozma I and Duncan JS. A game theoretic approach to integration of
modules, IEEE Trans. Patt. Anal. Mach. Intell. 1994;16:1074-1086.
[3] Chehikian A. Filtres récursifs pour l'estimation du gradient et de la
détection des contours par interpolation de splines, T.S. 1997;14:29-42.
[4] Chiou G and Hwang JN. A neural network-based stochastic active contour
model (nns-snake) for contour finding of distinct features, Im. Vis. Comput.
1995;4:1407-1416.
[5] Clarke LP, Velthuisen RP, Camacho MA, Heine JJ, Vaidyanathan M, Hall
LO, Thatcher RW and Silibiger ML. MRI segmentation: Methods and
applications, M.R.I. 1995;13:343-368.
[6] Collins D, Zijdenbos A, Kollokian V, Sled J, Kabani N, Holmes C and Evans
A. Design and construction of a realistic digital brain phantom, IEEE Trans.
Med. Imag. 1998;17:463-468.
27
[7] Cootes TF, Hill A, Taylor CJ and Haslam J. The use of active shape models
for locating structures in medical images, Im. Vis. Comput. 1995;12:335-365.
[8] Dale A, Fischl B and Sereno M. Cortical surface-based analysis I:
segmentation and surface reconstruction, NeuroImage. 1999;9:179-194.
[9] Davatzikos C and Prince JL. An active contour model for mapping the
cortex, IEEE Trans. Med. Imag. 1995;14:65-80.
[10] Duta N and Sonka M. Segmentation an interpretation of MR brain images,
IEEE Trans. Med. Imag. 1998;17:1049-1062.
[11] Held K, Kopps ER, Krause BJ, Wells WM, Kikinis R and Muller-Gartner
HW. Markov random field segmentation of brain MR images, IEEE Trans.
Med. Imag. 1997;16:878-886.
[12] Hoc J. Supervision et contrôle de processus: La cognition en situation
dynamique. PUF, Grenoble: 1996.
[13] Huet-Guillemot F, Fusion d'images segmentées et interprétées. Application
aux images aériennes, PhD Thesis, Cergy Pontoise (Fr), 1999.
[14] Jaggi C, Segmentation par méthode markovienne de l'encéphale humain
par résonance magnétique, PhD Thesis, Caen University, 1998.
[15] Kapur T, Eric W, Grimson L, Wells WM and Kikinis R. Segmentation of
the brain tissue from magnetic resonance images, Med. Im. Anal. 1996;1:109-
127.
[16] Kass M, Witkin A and Terzopoulos D. Snakes: Active contour models, Int.
J. Comput. Vision. 1988;Jan:321-331.
28
[17] Laidlaw DH, Fleischer KW and Barr AH. Partial-volume bayesian
classification of material mixtures in MR volume data using voxel histograms,
IEEE Trans. Med. Imag. 1998;17:74-86.
[18] Le Goualher G, Procyk E, Collins D, Venugopal R, Barillot C and Evans A.
Automated extraction and variability analysis of sulcal neuroanatomy, IEEE
Trans. Med. Imag. 1999;18:206-217.
[19] Lecornu L, Roux C and Jacq J. Suivi bilatéral des structures vasculaires
dans les images d'angiographie et reconstruction 3D des branches principales
du réseau vasculaire coronarien à partir de deux projections angiographiques,
T.S. 1998;15:395-410.
[20] Liu J and Tang YY. Adaptative image segmentation with distributed
behavior-based agents, IEEE Trans. Patt. Anal. Mach. Intell. 1999;21:544-551.
[21] McInerney T and Terzopoulos D. Deformable models in medical images
analysis: a survey, Med. Im. Anal. 1996;1:91-108.
[22] Meyer CR, Bland PH and Pipe J. Retrospective correction of intensity
inhomogenities in MRI, IEEE Trans. Med. Imag. 1995;14:36-41.
[23] Rajapakse J, Giedd J and Rapoport J. Statistical approach to segmentation
of single-channel cerebral MR images, IEEE Trans. Med. Imag. 1997;16:176-186.
[24] Sandor S and Leahy R. Surface-based labeling of cortical anatomy using a
deformable atlas, IEEE Trans. Med. Imag. 1997;16:41-54.
29
[25] Shufelt JA. Performance evaluation and analysis of monocular building
extraction from aerial imagery, IEEE Trans. Patt. Anal. Mach. Intell.
1999;21:311-326.
[26] Sled JG, Zujdenbos AP and Evans A. A non parametric method for
automatic correction of non uniformity in MRI data, IEEE Trans. Med. Imag.
1998;17:87-97.
[27] Székely G, Brechbuler C, Kelemen A and Gerig G. Segmentation of 2d and
3d objects from MRI volumes using constrained elastic deformations of flexible
Fourier contour and surface models, Med. Im. Anal. 1996;1:19-34.
[28] Teo PC, Sapiro G and Wandell BA. Creating connected representations of
cortical gray matter for functional MRI visualization, IEEE Trans. Med. Imag.
1997;16:852-863.
[29] Vaillant M and Davatzikos C. Finding parametric representation of the
cortical sulci using an active contour models, Med. Im. Anal. 1996;1:295-315.
[30] Warfield S, Dengler J, Zaers J, Guttmann CR, Wells WMr, Ettinger GJ,
Hiller J and Kikinis R. Automatic identification of gray matter structures from
MRI to improve the segmentation of white matter lesions, J Image Guid. Surg.
1995;1:326-38.
[31] Wells WL, Grimson L, Kikinis R and Jolesz FA. Adaptative segmentation
of MRI data, IEEE Trans. Med. Imag. 1996;15:429-442.
[32] Zijdenbos AP and Dawant BM. Brain segmentation and white matter
lesion detection in MR images, Crit. Rev. Bio. Eng. 1994;22:401-465.

30