5107.pdf - polyu electronic theses
TRANSCRIPT
Copyright Undertaking
This thesis is protected by copyright, with all rights reserved.
By reading and using the thesis, the reader understands and agrees to the following terms:
1. The reader will abide by the rules and legal ordinances governing copyright regarding the use of the thesis.
2. The reader will use the thesis for the purpose of research or private study only and not for distribution or further reproduction or any other purpose.
3. The reader agrees to indemnify and hold the University harmless from and against any loss, damage, cost, liability or expenses arising from copyright infringement or unauthorized usage.
IMPORTANT
If you have reasons to believe that any materials in this thesis are deemed not suitable to be distributed in this form, or a copyright owner having difficulty with the material being included in our database, please contact [email protected] providing details. The Library will look into your claim and consider taking remedial action upon receipt of the written requests.
Pao Yue-kong Library, The Hong Kong Polytechnic University, Hung Hom, Kowloon, Hong Kong
http://www.lib.polyu.edu.hk
i
ESTIMATION OF AIRCRAFT TRIP FUEL
CONSUMPTION: A NOVEL SELF-ORGANIZING
MACHINE LEARNING CONSTRUCTIVE NEURAL
NETWORK
WAQAR AHMED KHAN
PhD
The Hong Kong Polytechnic University
2020
ii
The Hong Kong Polytechnic University
Department of Industrial and Systems Engineering
Estimation of Aircraft Trip Fuel Consumption: A
Novel Self-Organizing Machine Learning
Constructive Neural Network
WAQAR AHMED KHAN
A thesis submitted in partial fulfilment of the
requirements for the degree of Doctor of Philosophy
May 2020
iii
Certificate of Originality
I hereby declare that this thesis is my own work and that, to the best of my knowledge and
belief, it reproduces no material previously published or written, nor material that has been
accepted for the award of any other degree or diploma, except where due acknowledgement
has been made in the text.
__________________________ (Signed)
KHAN, Waqar Ahmed (Name of student)
iv
Abstract
Accurate estimation of aircraft fuel consumption is critical for airlines in terms of safety and
profitability. Recently, the growth in the aviation industry worldwide has made accurate fuel
estimation an important research topic. It can be revealed that the demand for passengers and
cargos has increased by 7.4% and 3.4% respectively in 2018 as compared to the level in 2017.
Similarly, in 2006, the airline industry fuel consumption was 69 billion gallons and it was
forecasted that it will change to 97 billion gallons in 2019. Despite these pleasing economic
conditions for airlines, the increase in jet fuel prices and restrictions to protect environmental
degradation comprises a lot of challenges. It was forecasted that jet fuel prices will increase by
31.18% in 2019 as compared to those in 2015. International authorities stress to reduce carbon
dioxide (CO2) emissions by 50% in 2050 and reduce fuel consumption by 1.5% per year to
avoid ozone depletion. In the future, international authorities are planning to make it mandatory
for airlines to certify their aircraft according to CO2 certification standards. These challenges
and restrictions force airlines operating organizations to control excess fuel consumption.
Furthermore, among various airline operating expenses, fuel consumption cost accounts for the
highest contribution of 28.2% of the total operating cost. A slight change in fuel prices can
create an enormous impact on airlines operating expenses making it more valuable to study.
The increasing awareness for environmental protection by international authorities in
conjunction with growing fuel prices and boosting demand from tourism are encouraging
airline operating companies to adopt competitive strategies in fuel management to control
excess fuel consumption for long-term sustainability.
In current practice, estimation of fuel consumption for a flight trip is usually done by an energy
balance approaches (EAs). However, according to the existing literature, the information
needed to determine the coefficients are not always available in a real scenario and a lot of
v
flight testing need to be performed to generate data which may make the EAs expensive. The
unavailability of data may result in the usage of global parameters with default values rather
than local parameters, which may lead to inaccurate results. The complex mathematical
computation, high testing and consultation cost, expert involvement, and estimation errors,
which may become worse in certain conditions limit EA methods applicability. Later, machine
learning backpropagation neural networks (BPNNs) was proposed to provide an alternative to
EAs. The main limitation of earlier works on the application of a BPNNs for fuel estimation is
that they only covered a small number of aircraft types with limited flight data. The reasons for
this may be the weak generalization performance and slow convergence drawbacks of a BPNN
based on trial-and-error approaches to select the best hyperparameters. Besides, BPNN based
fuel estimation models were proposed by considering low-level operational parameters with
the future recommendation of incorporating more parameters that may have a significant effect
on fuel consumption. Other than EAs and BPNNs, many other models for fuel estimation are
proposed in the literature by considering distinct flight phases. Their cumulative effect to
estimate fuel for the whole journey may even result in the suboptimal estimation.
The application of neural networks (NNs) is gaining much popularity in the airline sector to
improve its various operations and enhance services. Limiting our study scope to EA and
BPNN based fuel estimation models, the actual performance of aircraft usually deviates from
such estimation. The required quantity of fuel needed for a safe journey is dependent on many
operational parameters and estimation methods. Loading suboptimal or abundant fuel in
aircraft may result in deviation of fuel from estimation. The fuel deviation may be either
positive or negative known as overestimation or underestimation, respectively. Therefore, extra
fuel is loaded in the discrepancy reservoirs based on experience because of less confidence in
the estimation methods and to meet unforeseen conditions and accounts for aircraft
deterioration. This increases the weight of the aircraft, requiring more thrust to balance drag
vi
and weight. Ultimately more fuel is consumed, and more frequent aircraft maintenance is
required than planned.
To overcome the above limitations of trip fuel estimation, our objectives are threefold: i) to
formulate a model and define an objective function of minimizing fuel deviation, ii) to propose
a novel self-organizing constructive neural network (CNN) featuring a cascade topology and
capable of analytically calculating connection weight coefficients to achieve better
generalization performance and faster learning speed, and iii) to apply the novel CNN for
minimizing fuel deviation and make performance comparison with the existing airline energy
approach (AEA) and the BPNN. The purpose is to achieve better estimation by adding high-
level operational parameters, avoid using global operational parameters, eliminate the need for
a trial-and-error approach, reduce the number of hyperparameter adjustments and expert
involvement. We consider that insufficient attempts have been reported in the literature
concerning estimates of trip fuel using CNNs along with high-dimensional data for the entire
trip flight phases collectively. A comparative study of the proposed CNN with the existing
AEA and the BPNN gives an important managerial insight. The numerical results demonstrate
that the trip fuel estimation by the proposed CNN achieves better results compared to AEA and
BPNN while requiring the shortest time compared to the BPNN. The significant improvement
in trip fuel estimation creates greater confidence in the proposed CNN given that it may
eliminate the need for adding more fuel based solely on experience.
vii
List of Publications
International Journal Publications
Khan, W.A., Chung, S.H., Ma, H.L., Liu, S.Q. and Chan, C.Y. (2019), “A novel self-
organizing constructive neural network for estimating aircraft trip fuel consumption”,
Transportation Research Part E: Logistics and Transportation Review, Vol. 132, pp. 72–
96.
Khan, W.A., Chung, S.H., Awan, M.U. and Wen, X. (2019a), “Machine learning facilitated
business intelligence (Part I): Neural networks learning algorithms and applications”,
Industrial Management & Data Systems, Vol. 120 No. 1, pp. 164–195.
Khan, W.A., Chung, S.H., Awan, M.U. and Wen, X. (2019b), “Machine learning facilitated
business intelligence (Part II): Neural networks optimization techniques and
applications”, Industrial Management & Data Systems, Vol. 120 No. 1, pp. 128–163.
International Conference Proceedings
Khan, W.A., Chung, S.H. and Chan, C.Y. (2018), “Cascade principal component least squares
neural network learning algorithm”, 2018 24th International Conference on Automation
and Computing (ICAC), IEEE, pp. 1–6.
Khan, W.A., Chung, S.H., Awan, M.U. and Wen, X. (2019c), “Improving the convergence
and extracting useful information from high dimensional big data with neural networks”,
2019 International Conference on Business, Big-Data, and Decision Sciences (ICBBD),
pp. 40–41.
viii
Acknowledgment
Firstly, I would like to express my sincere gratitude to my supervisor Dr. Sai-Ho Chung for his
trust, patience, support, motivation, and encouragement during my Ph.D. period. His guidance
helped me in all the time of my research work and writing of this thesis. I could not have
imagined a better supervisor and mentor than him for my Ph.D. study. Honestly, without his
support, I would not be able to achieve this milestone.
My sincere thanks also go to my co-supervisor Dr. Ching Yuen Chan who provided me an
opportunity to join his team. Without his precious support, it would not be possible to conduct
this research.
Many thanks to Prof. Shi Qiang Liu, Dr. Muhammad Usman Awan, Dr. MA Hoi Lam, and Dr.
Wen Xin for their discussions, feedbacks, and suggestions in improving the quality of research.
Last, but not least, I wish to express special thanks to my parents, wife, and friends for
supporting me spiritually throughout my Ph.D. period and my life in general.
ix
Table of Contents
Certificate of Originality ........................................................................................................ iii
Abstract .................................................................................................................................... iv
List of Publications ................................................................................................................ vii
Acknowledgment ................................................................................................................... viii
Table of Contents .................................................................................................................... ix
List of Figures ......................................................................................................................... xii
List of Tables ......................................................................................................................... xiv
List of Abbreviations ............................................................................................................ xvi
Chapter 1. Introduction .......................................................................................................... 1
1.1 Research background ..................................................................................................... 1
1.2 Problem statements ........................................................................................................ 5
1.3 Research objectives ........................................................................................................ 7
1.4 Research contributions ................................................................................................... 8
1.5 Research scope and significance .................................................................................. 10
1.6 Structure of the thesis................................................................................................... 11
Chapter 2. Literature Review ............................................................................................... 13
2.1 Aircraft fuel estimation ................................................................................................ 13
2.1.1 EAs based fuel estimation ................................................................................ 14
2.1.2 BPNNs based fuel estimation ........................................................................... 16
2.1.3 Estimation methods other than NN-based machine learning methodologies .. 18
2.2 Neural networks learning algorithms and optimization techniques ............................. 19
2.2.1 Survey methodology ........................................................................................ 21
2.2.1.1 Source of literature ............................................................................... 21
2.2.1.2 The philosophy of the review work ...................................................... 25
2.2.1.3 Classification schemes ......................................................................... 26
2.2.2 FNN: An overview ........................................................................................... 31
2.2.3 Learning algorithms and applications .............................................................. 33
2.2.3.1 Gradient learning algorithms for network training .............................. 33
2.2.3.2 Gradient free algorithms ....................................................................... 41
2.2.4 Optimization techniques and applications ........................................................ 51
x
2.2.4.1 Optimization algorithms for learning rate ............................................ 51
2.2.4.2 Bias and variance (underfitting and overfitting) minimization
algorithms ............................................................................................. 58
2.2.4.3 Constructive topology FNN ................................................................. 66
2.2.4.4 Metaheuristic search algorithms ........................................................... 71
2.3 Discussion .................................................................................................................... 75
Chapter 3. Trip Fuel Model Formulation for Minimizing Fuel deviation ....................... 82
3.1 Introduction .................................................................................................................. 82
3.2 Fuel consumption and deviation problem framework ................................................. 84
3.3 Model formulation ....................................................................................................... 87
3.3.1 Complex high-level operational parameters ................................................... 87
3.3.1.1 Statistical analysis and extraction ........................................................ 87
3.3.1.2 Influence of extracted parameters on the fuel consumption ................ 88
3.3.2 Mathematical and data-driven solution methods ............................................. 91
3.3.2.1 Relationship between mathematical and data-driven methods ............ 97
3.3.2.2 Significance of the proposed method ................................................. 100
3.3.3 Trip fuel model formulation ........................................................................... 103
3.4 Summary .................................................................................................................... 108
Chapter 4. A Novel Self-Organizing Constructive Neural Network Algorithm ............ 111
4.1 Introduction ................................................................................................................ 111
4.2 Convergence limitations of CasCor and its extensions .............................................. 112
4.3 Orthogonal linear transformation and ordinary least squares .................................... 115
4.4 Cascade principal component least squares neural network ...................................... 116
4.4.1 Lemma and statement ..................................................................................... 117
4.4.2 Analytically determining hidden units input connection weights .................. 117
4.4.3 Analytically determining hidden units output connection weights ................ 119
4.4.4 Adding hidden layers ..................................................................................... 120
4.4.5 Hyperparameters ............................................................................................ 120
4.4.6 Convergence theoretical justification ............................................................. 121
4.5 Experimental work ..................................................................................................... 125
4.5.1 Artificial benchmarking problems ................................................................. 126
4.5.1.1 Two Spiral classification task ............................................................ 126
xi
4.5.1.2 SinC function approximation regression task .................................... 128
4.5.2 Real-world problems ...................................................................................... 129
4.5.3 Selection of hidden units in the hidden layers ................................................ 134
4.5.4 Role of connecting only newly added hidden layer to the output layer ......... 137
4.6 Summary .................................................................................................................... 140
Chapter 5. Reducing the Negative Role of Global Parameters with Default Values and
Varying Operational Parameters Effect on the Trip Fuel Estimation ........ 142
5.1 Introduction ................................................................................................................ 142
5.2 Problem context ......................................................................................................... 143
5.3 Data analytics for fuel consumption .......................................................................... 143
5.4 Solution methods and computational results ............................................................. 144
5.4.1 Proposed method and existing methods ......................................................... 144
5.4.2 Trip fuel estimation methods performance analysis and discussion .............. 145
5.4.2.1 Combined model ................................................................................ 145
5.4.2.2 Individual models ............................................................................... 149
5.5 Summary .................................................................................................................... 160
Chapter 6. Conclusion and Future Work .......................................................................... 162
6.1 Conclusion ................................................................................................................. 162
6.2 Future work ................................................................................................................ 169
Appendix A. Neural Networks Learning Algorithms and Optimization Techniques
Applications ................................................................................................ 175
References ............................................................................................................................. 192
xii
List of Figures
Figure Title Page
Figure 1.1. Fuel cost (US$ billion) and cost per barrel (US$) 2
Figure 1.2. Passenger demand (RPK) 2
Figure 1.3. Cargo demand (FTK) 3
Figure 1.4. Fuel consumption and carbon dioxide emission 3
Figure 2.1. Articles distribution 22
Figure 2.2. Articles published over time 25
Figure 2.3. Algorithms distribution categories wise 29
Figure 2.4. Algorithms proposed over time 30
Figure 2.5. Papers distribution categories wise 30
Figure 3.1. Fuel estimation before flight and consumption after the flight 85
Figure 3.2. BPNN learning algorithm network 96
Figure 4.1. CasCor learning algorithm network 114
Figure 4.2. CPCLS learning algorithm network 118
Figure 4.3. Two spiral classification task 126
Figure 4.4. SinC function regression task 128
Figure 4.5. Smooth and stable convergence of CPCLS 133
Figure 4.6. Hidden units generation effect on generalization performance of
CPCLS
135
Figure 4.7. Hidden units generation effect on learning of CPCLS 136
Figure 4.8. Hidden units generation effect on network of CPCLS 136
Figure 4.9 Shuffled dataset results of LHL and AHL 138
Figure 4.10. Different test size dataset results of LHL and AHL 139
xiii
Figure 5.1. Fuel deviation (combined model) 148
Figure 5.2. Fuel deviation interval (combined model) 148
Figure 5.3. Fuel deviation (𝑆𝑅𝐻𝑈𝑆𝐼) 153
Figure 5.4. Fuel deviation (𝑆𝑅𝐻𝐷) 153
Figure 5.5. Fuel deviation (𝑆𝑅𝑈𝑆1𝐻 ) 153
Figure 5.6. Fuel deviation (𝑆𝑅𝑈𝑆2𝐻 ) 154
Figure 5.7. Fuel deviation (𝑆𝑅𝑈𝐾𝐻 ) 154
Figure 5.8. Fuel deviation (𝑆𝑅𝐻𝑈𝑆2) 154
Figure 5.9. Fuel deviation (𝑆𝑅𝐻𝑈𝐾) 155
Figure 5.10. Fuel deviation (𝑆𝑅𝐻𝐴) 155
Figure 5.11. Fuel deviation interval (𝑆𝑅𝐻𝑈𝑆𝐼) 156
Figure 5.12. Fuel deviation interval (𝑆𝑅𝐻𝐷) 156
Figure 5.13. Fuel deviation interval (𝑆𝑅𝑈𝑆1𝐻 ) 156
Figure 5.14. Fuel deviation interval (𝑆𝑅𝑈𝑆2𝐻 ) 157
Figure 5.15. Fuel deviation interval (𝑆𝑅𝑈𝐾𝐻 ) 157
Figure 5.16. Fuel deviation interval (𝑆𝑅𝐻𝑈𝑆2) 157
Figure 5.17. Fuel deviation interval (𝑆𝑅𝐻𝑈𝐾) 158
Figure 5.18. Fuel deviation interval (𝑆𝑅𝐻𝐴) 158
xiv
List of Tables
Table Title Page
Table 2.1. Articles source description 23
Table 2.2. Classification of FNN published algorithms 27
Table 3.1. Correlation analysis of selected operational parameters with trip fuel
consumption
88
Table 3.2. Relationship between the mathematical method and data-driven
method
99
Table 3.3. Relationship among existing BPNN-based fuel estimation models
and the proposed method
102
Table 4.1. Generalization accuracy and learning speed of two spiral
classification task
127
Table 4.2. Generalization performance and learning speed of SinC regression
task
128
Table 4.3. Dataset extracted from UCI 130
Table 4.4. Algorithms comparison on real world regression problems 131
Table 4.5. Algorithms comparison on real world classification problems 132
Table 4.6. CPCLS and CasCor extensions comparison 134
Table 4.7. Connecting hidden layers to output unit in CPCLS 138
Table 5.1. Trip fuel deviation by AEA, BPNN and CPCLS (combined model) 146
Table 5.2. Performance improvement comparison (combined model) 146
Table 5.3. Trip fuel deviation by the AEA, BPNN and CPCLS (individual
models)
151
Table 5.4. Performance accuracy comparison (individual models) 151
xv
Table A.1. Applications of gradient learning algorithms 176
Table A.2. Applications of gradient free learning algorithms 179
Table A.3. Applications of optimization algorithms for learning rate 184
Table A.4. Applications of bias and variance minimization algorithms 186
Table A.5. Applications of constructive algorithms 188
Table A.6. Applications of metaheuristic search algorithms 190
xvi
List of Abbreviations (Alphabetical order)
AdaGrad Adaptive Gradient algorithm
Adam Adaptive Moment estimation
AEA Airline Energy balance Approach
AFBM Advanced Fuel Burn Model
AFCM Aircraft Fuel Consumption Model
AHL All Hidden Layers
APSO Adaptive Particle Swarm Optimization
BADA Base of Aircraft Data
B-ELM Bidirectional Extreme Learning Machine
BFGS Broyden–Fletcher–Goldfarb–Shanno
BP Backpropagation
BPNN Backpropagation Neural Network
CasCor Cascade-Correlation neural network
CCOEN Cascade Correntropy Network
CG Conjugate Gradient method
COG Centre of Gravity
CI-ELM Convex Incremental Extreme Learning Machine
CNN Constructive Neural Network
CNNE Constructive Neural Network Ensemble
CO2 Carbon Dioxide
CPCLS Cascade Principal Component Least Squares Neural Network
DAOI-ELM Orthogonal Incremental Extreme Learning Machine based on the
Driving Amount
xvii
EA Energy balance Approach
ECNN Evolving Cascade Neural Network
EI-ELM Enhanced Incremental Extreme Learning Machine
ELM Extreme Learning Machine
EMA Exponential Moving weighted Average
EM-ELM Error Minimized Extreme Learning Machine
Eurocontrol European Organization for the Safety of Air Navigation
FAA Federal Aviation Administration
FCNN Faster Cascade Neural Network
FNN Feedforward Neural Network
FTKs Freight Tonne Kilometers
GA Genetic Algorithm
GANN Genetic Algorithm based Feedforward Neural Network
GD Gradient Descent
GHG Greenhouse Gases
GN Gauss-Newton
GPR Gaussian Process Regression
GRNN General Regression Neural Network
H-ELM Hierarchical Extreme Learning Machine
IATA International Air Transport Association
I-ELM Incremental Extreme Learning Machine
IFNNRWs Iterative Feedforward Neural Networks with Random Weights
IPSO-EM-ELM Particle Swarm Optimization Error Minimized Extreme Learning
Machine
LHL Last Hidden Layer
xviii
LM Levenberg-Marquardt
ML-ELM Multilayer Extreme Learning Machine
NBN Neuron by Neuron
NFL No Free Lunch theorem
NM Newton Method
NN Neural Network
No-Prop No-Propagation
OAA Optimized Approximation Algorithm
OI-ELM Orthogonal Incremental Extreme Learning Machine
OLSCN Orthogonal Least Squares based Cascade Network
OPF Operational Performance Files
OS-ELM Online Sequential Extreme Learning Machine
PNN Probabilistic Neural Network
PSO Particle Swarm Optimization
PSONN Particle Swarm Optimization based Feedforward Neural Network
QP Quickprop
quasi NM Quasi Newton Method
RPKs Revenue Passenger Kilometers
RProp Resilient Propagation
SGD Stochastic Gradient Descent
SLFN Single Layer Feedforward Neural network
SNRF Signal to Noise Ratio Figure
𝑆𝑅𝐻𝐴 Sector route from departure airport at Australia and arrival airport at
Hong Kong
xix
𝑆𝑅𝐻𝐷 Sector route from departure airport at Dubai and arrival airport at
Hong Kong
𝑆𝑅𝑈𝐾𝐻 Sector route from departure airport at Hong Kong and arrival airport
at the United Kingdom
𝑆𝑅𝐻𝑈𝐾 Sector route from departure airport at the United Kingdom and
arrival airport at Hong Kong
𝑆𝑅𝑈𝑆1𝐻 Sector route from departure airport at Hong Kong and arrival
airport-one at the United States of America
𝑆𝑅𝐻𝑈𝑆𝐼 Sector route from departure airport-one at United States of America
and arrival airport at Hong Kong
𝑆𝑅𝑈𝑆2𝐻 Sector route from departure airport at Hong Kong and arrival
airport-two at the United States of America
𝑆𝑅𝐻𝑈𝑆2 Sector route from departure airport-two at United States of America
and arrival airport at Hong Kong
TOW Takeoff Weight
TSFC Thrust-Specific Fuel Consumption
W-ELM Weighted Extreme Learning Machine
WOA Whale Optimization Algorithm
1
Chapter 1. Introduction
Chapter 1 is about Introduction and is organized as follows. Section 1.1 is about the research
background. Section 1.2 concisely give statements of the problem by highlighting existing
research gaps. Section 1.3 is about research objectives to add knowledge to the existing
literature. Section 1.4 explains the research contributions. Section 1.5 briefly discusses research
scope and significance, and Section 1.6 elaborates on the structure of the thesis.
1.1 Research background
The calculation of the amount of trip fuel is essential for an aircraft to safely reach the
destination. Consequently, it receives much attention in the aviation sector. Controlling excess
fuel consumption has become one of the major concerns for airline operating organizations
given that it contributes to increasing operating expenses (Sheng et al., 2019). Globally, during
the last decade, fuel cost accounts for an average contribution of 28.2% of the total operating
cost among various airline operating expenses. Therefore, it is critical to design methodologies
for accurately planning the trip fuel required for each flight (IATA, 2019). The required
quantity of trip fuel loaded in an aircraft depends on many operational parameters and
estimation methods. Loading suboptimal trip fuel may result in the utilization of fuel from the
supplementary reservoir, whereas abundant trip fuel may increase the ramp weight. Both
situations are undesirable for the smooth operation of an airline. Utilizing supplementary
reservoir fuels, which are reserved to meet unexpected flight conditions such as bad weather,
alternative airport divergence, airport congestion, and hold-on, may create uncertainty for the
flight crew. Conversely, loading abundant fuel may ensure a safe journey but with an additional
cost in terms of excess fuel consumption and early aircraft maintenance. In both scenarios, the
actual trip fuel consumed during each flight significantly deviates from the estimated trip fuel.
2
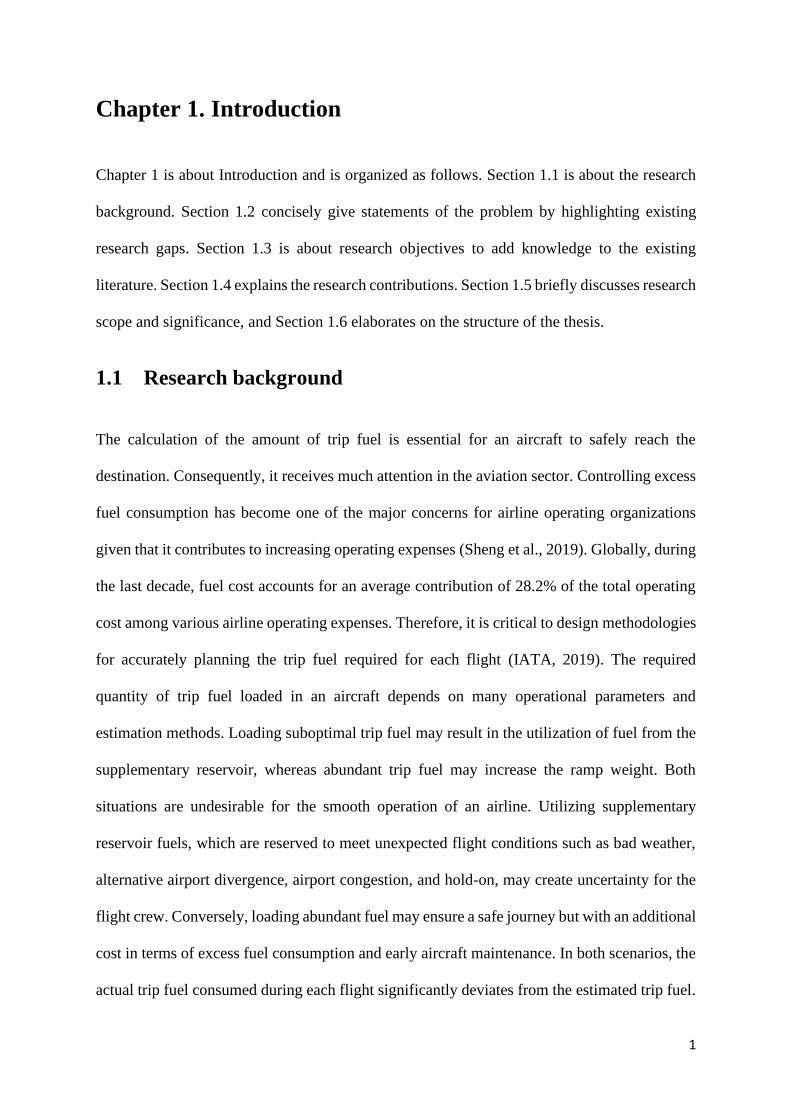
Fuel deviation, defined as the difference between the actual trip fuel consumed during a flight
and the trip fuel estimated before that flight, may take either negative or positive values
corresponding to underestimation or overestimation, respectively. A low confidence in
estimation methods and the need to meet unforeseen flight issues require adding an extra
amount of fuel in the discrepancy – rather than contingency or final emergency – reservoir
based on experience. This makes the situation worse for airlines. First, it increases the total
weight of the aircraft, requiring more thrust to balance weight and drag in combination with
other atmospheric and physical factors (Irrgang et al., 2015). Taking more fuel onboard not
only increases the weight of an aircraft but also affects the performance of its engines in the
Figure 1.1. Fuel cost (US$ billion) and cost per barrel (US$)
020406080100120140
0
50
100
150
200
250
2006
2007
2008
2009
2010
2011
2012
2013
2014
2015
2016
2017
2018
2019F
US
$
US
$ b
illi
on
Year
Fuel, US$ billion Jet kerosene price, US$/barrel
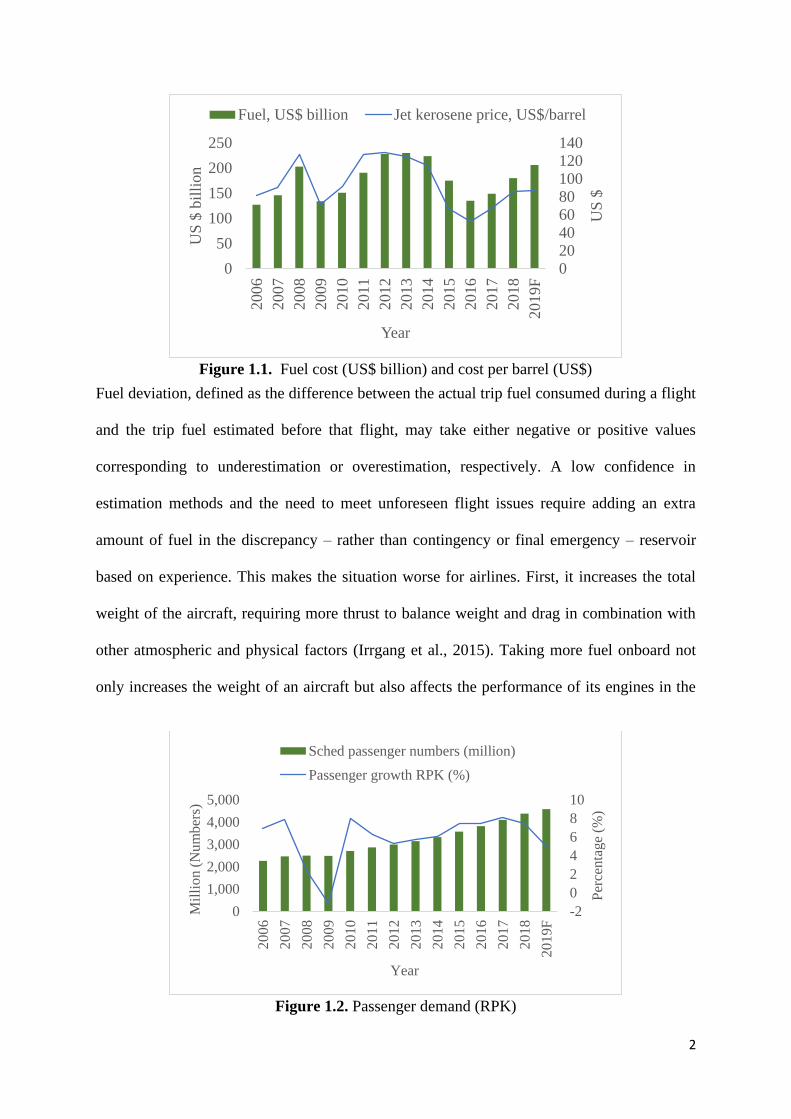
Figure 1.2. Passenger demand (RPK)
-2
0
2
4
6
8
10
0
1,000
2,000
3,000
4,000
5,000
20
06
20
07
20
08
20
09
20
10
20
11
20
12
20
13
20
14
20
15
20
16
20
17
20
18
20
19F
Per
cen
tage
(%)
Mil
lio
n (
Nu
mb
ers)
Year
Sched passenger numbers (million)
Passenger growth RPK (%)
3
long run by burning more fuel per unit distance. This ultimately shortens the lifetime of
engines, which need more frequent maintenance than planned (Abdelghany et al., 2005).
Moreover, an aircraft may require more fuel to burn than a brand-new one and the pilots may
be unaware of the actual amount of wear (deterioration) in the aircraft or may not know how
the wear is calculated by particular estimation methods. As a result, the pilots will demand
more fuel as a buffer in the discrepancy reservoir of the aircraft (Irrgang et al., 2015).
Therefore, the objective of reaching the destination with the smallest possible amount of fuel
left in the trip tank or utilized from the supplementary tank constitutes a challenging task to
accomplish.
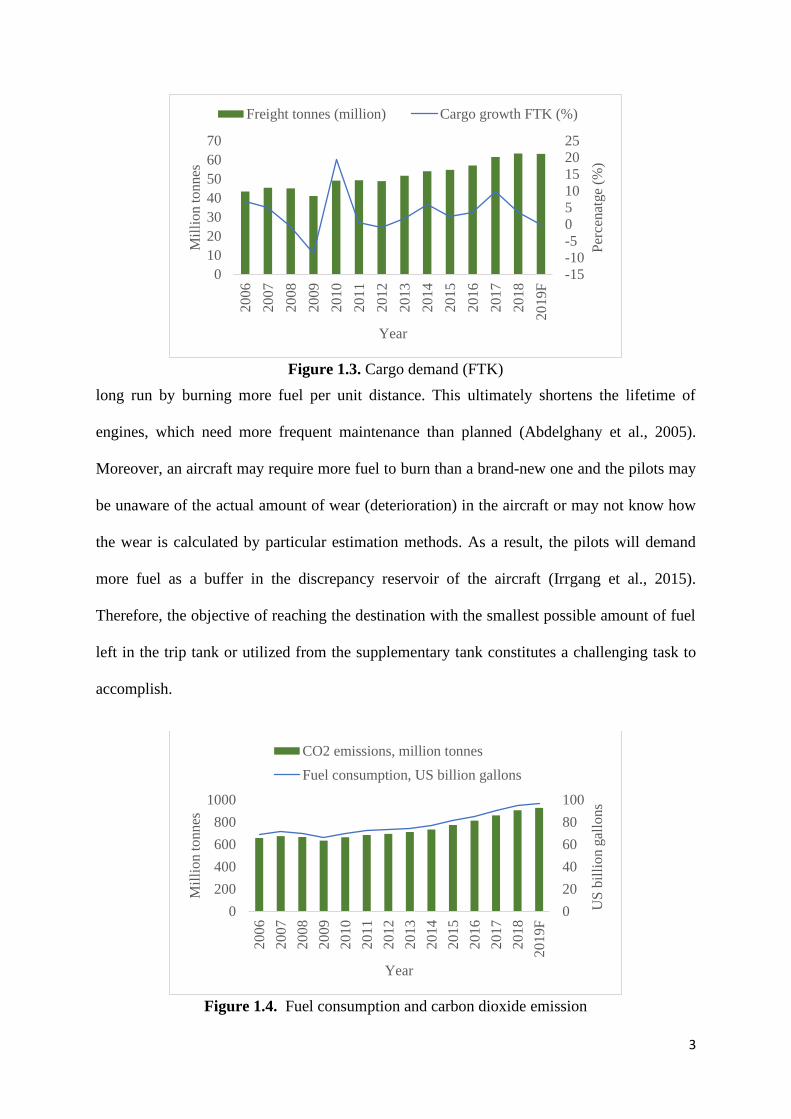
Figure 1.3. Cargo demand (FTK)
-15
-10
-5
0
5
10
15
2025
0
10
20
30
40
50
60
70
20
06
20
07
20
08
20
09
20
10
20
11
2012
20
13
20
14
20
15
20
16
20
17
20
18
20
19F
Per
cen
atge
(%)
Mil
lio
n to
nn
es
Year
Freight tonnes (million) Cargo growth FTK (%)
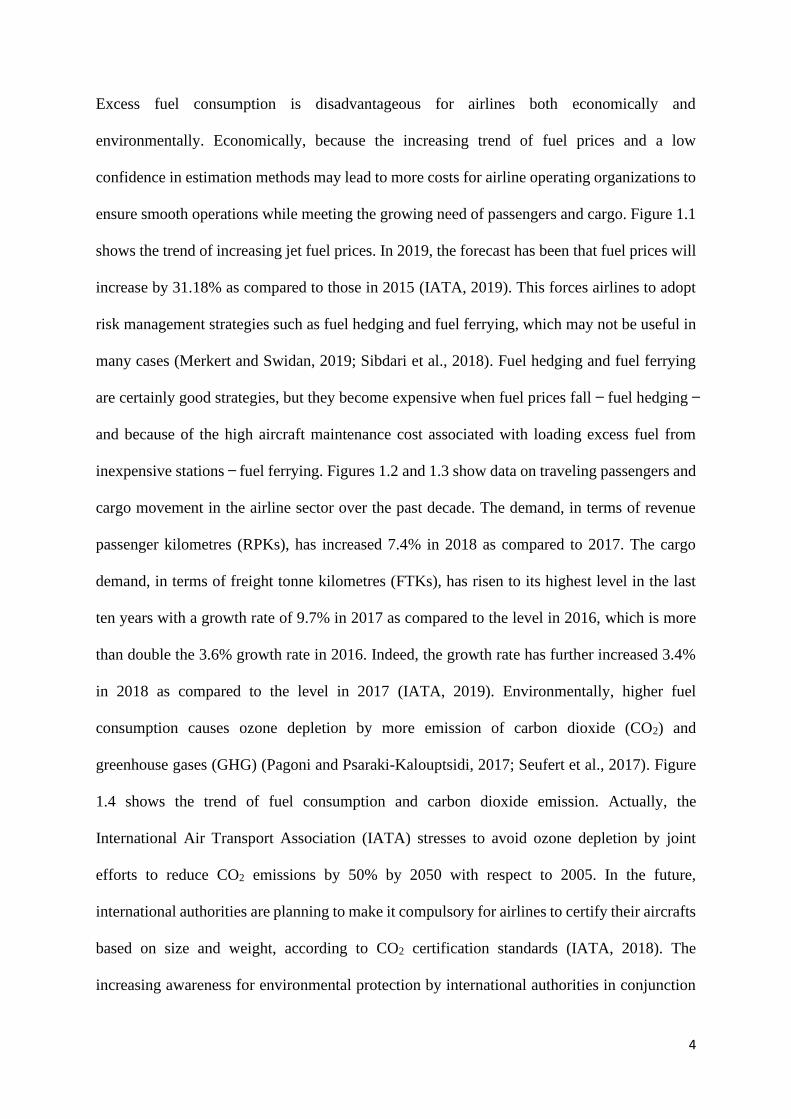
Figure 1.4. Fuel consumption and carbon dioxide emission
0
20
40
60
80
100
0
200
400
600
800
1000
20
06
20
07
20
08
20
09
20
10
20
11
20
12
20
13
20
14
20
15
20
16
20
17
20
18
20
19F
US
bil
lio
n g
allo
ns
Mil
lio
n to
nn
es
Year
CO2 emissions, million tonnes
Fuel consumption, US billion gallons
4
Excess fuel consumption is disadvantageous for airlines both economically and
environmentally. Economically, because the increasing trend of fuel prices and a low
confidence in estimation methods may lead to more costs for airline operating organizations to
ensure smooth operations while meeting the growing need of passengers and cargo. Figure 1.1
shows the trend of increasing jet fuel prices. In 2019, the forecast has been that fuel prices will
increase by 31.18% as compared to those in 2015 (IATA, 2019). This forces airlines to adopt
risk management strategies such as fuel hedging and fuel ferrying, which may not be useful in
many cases (Merkert and Swidan, 2019; Sibdari et al., 2018). Fuel hedging and fuel ferrying
are certainly good strategies, but they become expensive when fuel prices fall ̶ fuel hedging ̶
and because of the high aircraft maintenance cost associated with loading excess fuel from
inexpensive stations ̶ fuel ferrying. Figures 1.2 and 1.3 show data on traveling passengers and
cargo movement in the airline sector over the past decade. The demand, in terms of revenue
passenger kilometres (RPKs), has increased 7.4% in 2018 as compared to 2017. The cargo
demand, in terms of freight tonne kilometres (FTKs), has risen to its highest level in the last
ten years with a growth rate of 9.7% in 2017 as compared to the level in 2016, which is more
than double the 3.6% growth rate in 2016. Indeed, the growth rate has further increased 3.4%
in 2018 as compared to the level in 2017 (IATA, 2019). Environmentally, higher fuel
consumption causes ozone depletion by more emission of carbon dioxide (CO2) and
greenhouse gases (GHG) (Pagoni and Psaraki-Kalouptsidi, 2017; Seufert et al., 2017). Figure
1.4 shows the trend of fuel consumption and carbon dioxide emission. Actually, the
International Air Transport Association (IATA) stresses to avoid ozone depletion by joint
efforts to reduce CO2 emissions by 50% by 2050 with respect to 2005. In the future,
international authorities are planning to make it compulsory for airlines to certify their aircrafts
based on size and weight, according to CO2 certification standards (IATA, 2018). The
increasing awareness for environmental protection by international authorities in conjunction
5
with growing fuel prices and boosting demand from tourism are encouraging airline operating
companies to adopt competitive strategies in fuel management to control excess fuel
consumption for long-term sustainability.
1.2 Problem statements
Accurately estimating the trip fuel for an aircraft has become an important research topic
because of profitability and safety issues. Several models have been studied in the literature,
however, still many gaps exist to improve and add a contribution to the existing literature. The
research gaps that need to be addressed are:
1 In current practice, estimation of fuel consumption for a flight trip is usually done by
an energy balance mathematical approaches (EAs). The most popular of them are the
Simmod simulation program, developed from the so-called advanced fuel burn model
(AFBM) (Collins, 1982) by the Federal Aviation Administration (FAA) (Baklacioglu,
2016), and the base of aircraft data (BADA) developed by the European Organization
for the Safety of Air Navigation (Eurocontrol) (Nuic, 2014). However, the actual
performance of a flight usually deviates from such estimation. Firstly, the information
needed to determine fuel flow is not always available in a real scenario and a great deal
of flight testing is needed to generate the parameter data, what may make the EAs
expensive technique to adopt (Trani and Wing-Ho, 1997). The parameters include
engine constants, airspeed, aircraft mass, atmospheric density, extra thrust needed for
ascending, and wing area (Huang et al., 2017). Secondly, aircraft fuel estimation may
not be accurate in EA methods owing to outdated existing databases and the
unavailability of data for all types of aircrafts and engines (Yanto and Liem, 2018). The
unavailability of data may result in the usage of more global parameters with default
values rather than local parameters, what in turn may lead to inaccurate results (Pagoni
6
and Psaraki-Kalouptsidi, 2017). Insufficient attempts have been made to study the
effect of usage of global parameters on the deviation of fuel consumption from
estimation.
2 The applications of machine learning neural networks (NNs) are gaining significant
interest among researchers to improve the various operation of airlines. To provide an
alternative and simplify the EA based fuel estimation methods, the application of a
backpropagation neural network (BPNN) was suggested in the literature. BPNN is a
fixed topology NN and adjustment of various hyperparameters is dependent on user
expertise. The trial and error experimental works and the problem of local minima may
not assure that selected network is optimal causing weak generalization performance
and slow convergence of the BPNN (Huang et al., 2006; Kapanova et al., 2018; Krogh
and Hertz, 1992; Liew et al., 2016; Srivastava et al., 2014). In existing works, BPNN
is applied to estimate fuel without addressing the above key issues.
3 In the existing literature, operational parameters are selected based on prior experience
and knowledge. There exist many operational parameters that may contribute to fuel
consumption and are previously ignored. The existing BPNN fuel estimation models
are proposed by considering low-level operational parameters, covering a small number
of aircraft types with limited flight data, with the future recommendation of
incorporating more parameters. A gap exists to extract and add high-level operational
parameters that can contribute to fuel consumption which is previously ignored.
4 Other than EAs and NNs, researchers have also developed models to achieve a better
fuel estimation. Similar to EAs and BPNNs, the limitation of models is that many of
them are proposed for distinct flight phases, e.g., take-off, cruise, and descent. The
weakness is that the models cannot be used for estimating fuel for a whole flight
journey. Taking the cumulative effect of phases to estimate fuel for the journey may
7
even lead to higher fuel deviation. It should be noted that complete flight trip fuel
consumption is dependent on many operational parameters and their changing
behaviour at the departure airport, cruise phase, and arrival airport.
5 Lastly, insufficient work exists that has studied the effect of dividing the high
dimensional historical data into chunks (portions) of data on fuel estimation, by
considering all phases collectively, using machine learning NNs. Machine learning
algorithms are highly dependent on historical datasets and application of an algorithm
that may give better results regardless of a change in data structure and size is gaining
an important consideration.
1.3 Research objectives
The purpose of this work is to develop a novel machine learning NN algorithm having
characteristics of better generalization performance and learning speed to handle efficiently
real and large-scale aircraft trip fuel estimation problems. The aim is to eliminate the need for
a trial-and-error approach, reduce the number of hyperparameter adjustments, usage of global
parameters, outdated database, and expert involvement. We consider that insufficient attempts
have been reported in the literature concerning the estimation of trip fuel using feedforward
constructive neural networks (CNNs) along with high-dimensional data for the entire trip flight
phases collectively. More specifically, the research objectives can be concisely described
below:
1 To formulate the trip fuel estimation model and define an objective function of
minimizing fuel deviation. Relevant operational parameters that can contribute to fuel
consumption will be extracted from the real historical high dimensional data of one of
the international airlines operating in Hong Kong. The extracted operational parameters
will be incorporated in the newly formulated model to estimate trip fuel for all phases
8
collectively. This objective will facilitate addressing the first four research gaps
identified in Section 1.2.
2 To develop a novel machine learning NN algorithm having characteristics of better
generalization performance and faster learning speed with a fewer hyperparameter
adjustment. The roadmap is to conduct a comprehensive review of the existing
literature, carried out in the last three decades, that proposed to improve the feedforward
neural networks (FNNs) learning algorithms and optimization techniques. Based on
extensive review and understanding of the merits, limitations, recent research trends
and research gaps in FNNs we plan to develop a novel CNN. The basic idea is to
generate linearly independent hidden units in each hidden layer from analytically
calculation of input units and connect only the last hidden layer to the output unit
through output connection weight having maximum error convergence property. This
objective will facilitate addressing second and fifth research gaps as identified in
Section 1.2.
3 To apply a novel CNN for minimizing the fuel deviation. The performance comparison
of novel CNN with an existing airline energy balance approach (AEA) and a traditional
BPNN will be made to understand the effectiveness of proposed CNN in minimizing
fuel deviation. This objective will mainly address all research gaps as identified in
Section 1.2.
1.4 Research contributions
Early attempts to estimate the trip fuel by EAs have gained popularity. However, the successful
wide use of machine learning in many applications has changed the interest of the airlines
operating organization. The unavailability of data related to local parameters, complex
mathematical formulations, and expertise involvement limits the applicability of EAs. The
9
application of BPNNs as an alternative to EAs constitutes an attempt to overcome the above
limitations with improved results. However, the existing BPNN-based fuel estimation models
only cover a small number of aircraft types with limited flight data. The possible reasons are
the random generation and iteratively tuning of the connection weights on both sides of BPNNs
by gradient-based learning algorithms. This may create a complex co-adaptation by generating
redundant hidden units, thereby contributing less to error convergence. The adjustment of local
and global hyperparameters with the connection weights may require many experimental trials
to obtain an optimal fixed-topology network. These problems increase the expertise
requirement as well as cause weak generalization performance and slow convergence.
The application of traditional machine learning NNs for airline trip fuel estimation is not
straightforward. Extensive knowledge is required to fit the algorithm to the model. The varying
nature of airline input parameters and the high dimensionality of data might be challenging for
traditional BPNNs to accurately estimate the trip fuel with the aforementioned limitations. The
same problem has been observed in our experimental work (discussed in Chapter 5). Similarly,
in the current literature, the application of fixed-topology BPNNs for fuel estimation is limited
in scope by considering a few aircraft types, flight data, and operational parameters. This means
that the application of machine learning NNs on the varying nature of operational parameters
and the high dimensionality of data is still an open area. To overcome the limitations of BPNNs,
this study proposes a CNN featuring a self-organizing cascading architecture and capable of
analytically calculating connection weights. These characteristics generate linearly
independent (non-redundant) hidden units having the capability of maximum error reduction.
The proposed CNN thus achieves a better generalization performance and converges
significantly faster than traditional BPNNs.
10
The application of the proposed CNN with varying operational parameters and high-
dimensional data for airline trip fuel estimation can bring a breakthrough improvement
compared to existing fuel estimation methods. Unlike EAs, the advantages of the proposed
CNN are that it requires neither the involvement and consultation of an expert for a complex
mathematical formulation nor the cost to determine the coefficients. In addition, it can work
with any type of available data. Compared to BPNNs, the proposed CNN avoids the fixed-
topology trail-and-error experimental works with too much adjustment of hyperparameters and
iterative tuning of the connection weights. These advantages simplify the implementation of
high-dimensional data with the objective of achieving better trip fuel estimation with fast
convergence. A comparative study has been performed among the proposed self-organizing
CNN, AEA, and a BPNN to estimate airline trip fuel. To make the study more valuable, the
comparison is not limited to high-dimensional data and its varying operational parameters
(referred to as a combined model in Section 5.4.2.1). We also include the portion of data
resulting from dividing high-dimensional data into a small dataset representing the same
behaviour within operational parameters (referred to as individual models in Section 5.4.2.2).
The significant improvement in trip fuel estimation and the learning speed in both models
(combined model and individual models) increase the confidence in that the proposed CNN
may eliminate the need of adding more fuel-based solely on experience.
1.5 Research scope and significance
The main focus of the research is to formulate a machine learning CNN model for aircraft trip
fuel estimation that is able to handle practical large-scale problems. The work will help to add
knowledge to the existing literature from two different viewpoints: academically and
practically. Academically, the research work will help to fill the identified research gaps in the
area of aircraft trip fuel estimation and machine learning as discussed in Section 1.2.
11
Practically, the research findings will provide insights into the aviation industry in controlling
airlines’ excess fuel consumption. Furthermore, it will add a contribution to the global goal of
IATA to make an average improvement in fuel efficiency of 1.5% per year (IATA, 2018).
1.6 Structure of the thesis
The thesis is organized as follows:
▪ Chapter 2 is about the literature review. This chapter is further divided into two major
sections followed by discussion. Section 2.1 is about the literature review explaining
mainly existing aircraft fuel estimation models. Section 2.2 is about literature review
explaining mainly FNNs learning algorithms and optimization techniques with their
merits, limitations, a shift in research trends, and real-world applications. Section 2.3
summarizes the research gaps.
▪ Chapter 3 explains the framework of fuel consumption and its deviation from the
estimation. The relevant operational parameters that may contribute to fuel
consumption are extracted and their relationships to fuel consumption are explained in
detail. The relationship between mathematical and data-driven methods is constructed
and the significance of the proposed method is elaborated. Then, the trip fuel estimation
model is formulated, and the objective function is defined.
▪ Chapter 4 is about the novel self-organizing CNN. This chapter initially explains
existing CNN and its extension convergence limitations. Then, a novel self-organizing
CNN learning algorithm is proposed and explained with supporting lemma and
theoretical justification. Finally, various set of artificial benchmarking and real-world
application dataset is used to demonstrate the generalization performance and learning
speed of proposed CNN.
12
▪ Chapter 5 is about aircrafts trip fuel estimation and comparison. The chapter describes
the data and pre-processing techniques. Then experimental work is carried out by
estimating trip fuel by novel CNN and making a comparison with AEA and BPNN.
Major findings are discussed in detail to get a better insight.
▪ Chapter 6 concludes the thesis by explaining the limitations of existing work and
possible future research directions.
▪ The application of FNNs in solving real-world problems, described in Chapter 2, are
presented in Appendix A.
13
Chapter 2. Literature Review
In Chapter 2, a literature review is carried out for two topics: aircraft fuel estimation, and FNNs
learning algorithms and optimization techniques. Firstly, for aircraft fuel estimation (Section
2.1), the existing fuel estimation models based on EAs (Subsection 2.1.1) and BPNNs
(Subsection 2.1.2) are reviewed. Later, other estimation methods are also reviewed in
Subsection 2.1.3 to enrich the content. Secondly, for neural networks learning algorithms and
optimization techniques (Section 2.2), we conducted a comprehensive review to understand
noteworthy contributions made in the area of the FNN and their merits and limitations; to
identify new research directions that will help to design novel and efficient algorithm. The
survey methodology of comprehensive review is discussed in Subsection 2.2.1. Subsection
2.2.2 gives a brief introduction to FNN. Learning algorithms and their applications are
reviewed in Subsection 2.2.3, whereas, optimization techniques and their applications are
reviewed in Subsection 2.2.4. Finally, in Section 2.3, the summary of the literature review and
research gaps of fuel estimation and FNN are identified and elaborated.
2.1 Aircraft fuel estimation
The trip fuel containing a maximum portion of fuel weight must be considered for
improvement. A small improvement in fuel estimation can bring significant savings in fuel
consumption and substantial cost benefit (Jensen et al., 2013). Irrgang et al. (2015) concluded
from their work on aircraft fuel optimization analytics that the optimal amount of fuel should
be accurately determined, resulting in the minimum amount of fuel remaining at the destination
airport. Taking extra fuel increases the weight of the aircraft, which results in more fuel
consumption than required. Turgut et al. (2014) worked on the fuel flow during the cruise
phase. They suggested that reducing the aircraft weight by 1 tonne, increasing the flying
14
altitude by 100 ft, and reducing the cruise speed by 1 knot may result in a reduction of per-hour
fuel consumption of 15-21 kg, 26-28 kg, and 7.7-8.7 kg, respectively. Taking more fuel
increases the weight of the aircraft, and in consequence, more fuel is consumed with higher
maintenance costs (Abdelghany et al., 2005). Therefore, more efficient and effective methods
are needed to make the estimation models applicable (Choi et al., 2016).
2.1.1 EAs based fuel estimation
Early attempts made use of EAs to estimate the fuel for aircrafts. EAs are based on extensive
mathematical formulations and are derived from the basic concept of energy balance. They
assume static constants of aircraft performance and a dynamic input of the path profile. The
energy balance can be expressed in terms of the energy the aircraft gains and losses as it travels
along the prescribed path profile. During each flight operation, as a result of the change in
kinetic and potential energies, the aircraft suffers energy losses because of drag. These losses
are adjusted by a certain amount of thrust to maintain the energy balance. Thus, an aircraft can
be viewed as a system undergoing energy losses and gains that should be continuously balanced
by the consumption of fuel energy. Collins (1982) derived an algorithm for fuel estimation
based on such energy balance approach by considering the description of aircraft configuration,
weight, and path profile. The path profile depends on a change in true airspeed, altitude, and
flight time. Collins (1982) explained that various aircraft-specific constants need to be
determined for each aircraft to define the relationship between drag and lift/weight coefficients
and to define the relationship between fuel consumption and energy gain from the thrust as a
function of velocity and altitude. Experimental work demonstrated that the algorithm could
result in saving more than two million US gallons of fuel annually. The accuracy check of the
algorithm with Eastern Airlines demonstrated its effectiveness with a difference of less than
3%. This algorithm, known as AFBM, was developed by the Mitre corporation under the FAA
15
and was incorporated in their simulation software Simmod to predict the fuel consumption for
each flight (Baklacioglu, 2016; Schilling, 1997). Similarly, BADA, developed by Eurocontrol
(Nuic, 2014), is another energy balance-based fuel estimation method that estimates thrust-
specific fuel consumption (TSFC) as a function of true airspeed. The fuel for different phases
and engine types (Jet, Turbo, and Piston) can be calculated from coefficients defined for each
aircraft type in operational performance files (OPF) of BADA. The BADA database holds a
set of files explaining the performance and operating procedure coefficient of many different
types of aircrafts. The coefficients are used to calculate drag, thrust, and fuel flow. As a result,
climb, nominal cruise, and descent speeds for the targeted aircraft are provided.
The AFBM Simmod model is based on various parameters to estimate fuel flow. The
parameters include engine constants, airspeed, aircraft mass, atmospheric density, extra thrust
needed for ascending, and wing area (Huang et al., 2017). Trani and Wing-Ho (1997) argued
that the information needed to determine fuel flow is not always available in a real scenario
and a great deal of flight testing is needed to generate the parameter data, what may make the
Simmod method expensive. The Simmod method has certainly improved the measurement of
airline fuel efficiency (Baklacioglu, 2016; Schilling, 1997; Senzig et al., 2009; Trani et al.,
2004). However, Senzig et al. (2009) reported that BADA is an effective method that has
gained much more popularity than Simmod. Indeed, BADA can estimate fuel consumption
with an average deviation of 3% during the cruise phase. For the terminal areas, such as takeoff
and descent, BADA losses accuracy. An average difference of -22.3% was observed between
the BADA model and the fuel consumption reported by an airline during the takeoff phase.
Moreover, according to recent studies, aircraft fuel estimation may not be accurate in EA
methods (Simmod and BADA) owing to outdated existing databases and the unavailability of
data for all types of aircrafts and engines (Yanto and Liem, 2018). The unavailability of data
may result in the usage of more global parameters with default values rather than local
16
parameters, which in turn may lead to inaccurate results (Pagoni and Psaraki-Kalouptsidi,
2017). Complex mathematical computation, high testing and consultation cost, expert
involvement, and estimation errors, which may become worse in certain conditions, limit EA
applicability.
2.1.2 BPNNs based fuel estimation
In the literature, many efforts have been made to simplify EA-based fuel estimation methods
with respect to BPNNs. Schilling (1997) proposed to estimate aircraft fuel by a BPNN in
conjunction with the AFBM energy balance theory to simplify the computational capability
and improve the estimation accuracy of the AFBM. The engine-specific constant in AFBM
was determined by multivariate regression with an average accuracy error of 4% (Schilling,
1997). Their proposed aircraft fuel consumption model (AFCM) comprises two systems: 1)
initial fuel estimation by AFBM; and 2) information generated by AFBM such as altitude,
velocity, and fuel estimated to map into the BPNN. Two inputs with 600 flight instances were
trained and a network with 2 layers and 7 hidden units in each layer was selected through a
trial-and-error approach among six candidate BPNNs. The employed various activation
function with a backpropagation Levenberg-Marquardt (LM) learning algorithm. Boeings 747-
100 and 767-200, Bombardier Dash-7, DC 10-30, and Jetstar were aircrafts used for
performance comparison. Schilling (1997) demonstrated that AFCM achieved better results
compared to AFBM. AFCM was modelled based on low-level input variables such as altitude
and velocity with the future recommendation of incorporating more operational parameters.
Trani and Wing-Ho (1997) pointed out that EAs are challenging to implement because of the
information required to define the constants and to determine the coefficients demands a great
effort in addition to testing and expertise. These disadvantages are the main constraints for their
expansion. Trani et al. (2004) proposed a BPNN as an alternative approach for fuel estimation
17
during the climb, cruise, and descent phases of a flight. Eight different sizes of BPNN candidate
networks for fuel estimation were constructed according to four operational parameters,
namely Mach number, weight, temperature, and altitude, covering the cruise phase in a dataset
comprising 1,610 flight instances performed by Fokker F-100 aircrafts. They suggested that a
BPNN trained by LM with three layers is the best approach for fuel estimation with eight
hidden units in the first two layers each and one unit in the output layer. The employed various
activation function with maximum stopping training epochs of 10,000. The BPNN was trained
for the cruise phase with a target vector of a specific air range rather than consumed fuel. The
trained BPNN model of the cruise phase was also implemented for the climb and descent flight
phases. Actually, the climb and descent phases consisted of a fuel burn output vector. This
implies that this research work is more focused on engine performance over distance traveled
during the cruise phase. The work does not clearly distinguish the estimation in different flight
phases because the specific air range is defined as the distance covered per unit of consumed
fuel (Nautical Miles/ Kilogram or NM/kg), whereas fuel burn may be related to fuel
consumption (kg) during flight. There exist many similarities between the suggestions of
(Schilling, 1997) and (Trani et al., 2004) concerning BPNNs. These similarities are based on
the same assumptions, involving trial-and-error approaches to find hidden units for two hidden
layers along with different activation functions.
Baklacioglu (2016) improved the work reported in (Trani et al., 2004) and proposed a so-called
genetic algorithm optimized neural network (GANN) to determine the network
hyperparameters and number of hidden layers to achieve the best model with less effort. Such
networks considered two input operational parameters, i.e., altitude and airspeed, as a function
of fuel flow rate, with a dataset composed of 347, 404, and 483 flight instances for the climb,
cruise, and descent phases, respectively. The targeted aircraft was a medium-weight Boeing
737-800. The work indicated that GANNs with one hidden layer is better than those with two
18
hidden layers and achieve improved results for the climb and descent phases compared to a
previously suggested model (Trani et al., 2004).
2.1.3 Estimation methods other than NN-based machine learning
methodologies
Apart from NN machine learning methodologies, researchers have also developed models to
achieve a better fuel estimation. Turgut and Rosen (2012) proposed a genetic algorithm fuel
consumption model for commercial flights in a Boeing B737-800 by studying the relationship
between altitude and fuel flow during four different descents within the descent flight phase.
This model suggests avoiding low-level flight and maintaining higher altitude if possible
during the descent phase for greater fuel saving. When a delay condition occurs, aircraft
holding at a higher altitude could save substantial fuel rather than holding the flight at a lower
altitude. The results demonstrate that performing low-level flights at an altitude 1000 ft higher
could substantially decrease fuel consumption. Chati and Balakrishnan (2017) studied the
impact of takeoff weight (TOW) on aircraft fuel consumption and proposed a Gaussian process
regression (GPR) statistical approach to determine TOW using observed data from takeoff
round roll. The estimated TOW model was used as an input to study its effect on fuel
consumption during ascent. In particular, GPR-estimated TOW was averaged over eight
different types of aircraft for 874 flight instances. The predicted TOW was used as an input
feature to estimate the fuel flow rate during the ascent phase. Ryerson et al. (2011) studied the
impact of three performance metrics, namely schedule padding, airborne delay, and departure
delay, on two aircrafts ̶ Boeing 757-200 and 737-800 ̶ on fuel consumption. They found that
airborne delays burn 50-60 lbs/minute of fuel compared with schedule padding, which is 4.5-
12 lbs/minute, and a departure delay, which is 2.3-4.6 lbs/minute. Additionally, a congested
airport terminal area increases fuel consumption by 16%. Improvement in performance
19
measurements by eliminating the above three delays by econometric methods can reduce
airborne fuel consumption.
2.2 Neural networks learning algorithms and optimization
techniques
The importance of FNN is increasing every day due to its property of processing big nonlinear
data like in the human brains. It can discover a hidden pattern in the data by entering raw data
in the input, passing layer by layer until it arrives at the output in the forward direction. The
model is trained to correctly estimate unseen data (also known as test data) referred to as the
generalization performance of FNN. The ideal FNN is considered to have better generalization
performance and may require less learning time (also known as convergence rate) to train the
model. Generalization performance can be defined as the ability of an algorithm to accurately
predict values on previously unseen samples (Yeung et al., 2007), whereas, learning time can
be defined as the ability of the algorithm to train a model quickly. Both “generalization
performance” and “learning time” are key performance indicators for FNNs and are used by
researchers to demonstrate the effectiveness of their proposed algorithms. Some of the
drawbacks that may affect the generalization performance and learning speed of FNNs include
local minima, saddle points, plateau surfaces, hyperparameters adjustment, trial and error
experimental work, tuning connection weights, deciding hidden units and layers, and many
others. The drawbacks that limit FNN applicability may become worse with inappropriate user
expertise and insufficient theoretical information. For instance, how to define network size,
hidden units, hidden layers, connection weights, learning rate, topology, and many others.
In the literature, the answers to the above problems are not so straightforward. Researchers
have proposed several learning algorithms and optimization techniques, that benefit in
20
improving the FNN, with the main motivation to get a better generalization performance in the
shortest possible network training time. In the existing literature surveys, several authors have
reviewed FNN algorithms by performing a comparative study of different algorithms within
the same class (for instance: constructive algorithms comparison based on data, and many
others), studying the application area (for instance: business, engineering, and many others)
and specific class surveys (for instance: network ensemble survey and many others). For
instance, Zhang (2000) focused on and surveyed the recent development of neural networks
for classification problems. The review included the link between the neural and conventional
classifiers and demonstrated that neural networks are a competitive alternative to the traditional
classifiers. Other contributions include examining the issues of posterior probability
estimation, feature selection, and the trade-off between learning and generalization. Hunter et
al. (2012) performed a comparative study among different types of learning algorithms and
network topology so as to select a proper neural network size and architecture for better
generalization performance. LeCun et al. (2015) reviewed deep learning and provided in-depth
knowledge of backpropagation, convolutional neural network, and recurrent neural networks.
The success in deep learning is that it requires little engineering by hand and new algorithms
will accelerate its progress much more. Tkáč and Verner (2016) provided a systematic review
of neural network applications over two decades and disclosed that most of the application
areas included financial distress and bankruptcy. Cao et al. (2018) presented a survey on tuning
free random weights neural networks from the perspective of deep learning. The traditional
deep learning iterative algorithms are far slower and have the problem of local minima. The
survey suggests that the computing efficiency of deep learning increases due to the combination
of traditional deep learning and tuning free random weights neural networks.
In the above studies, the focus is only on the specific type of algorithms or their applications
which limits their scope. The existing studies are more focused on comparing and selecting a
21
suitable algorithm within their class which is solely based on expertise and available
application data. It does not clearly identify the research directions over the past decades.
Researchers have made efforts to reduce the drawbacks of FNNs, however, a comprehensive
review is missing, and an open challenge is to gather the answers for the drawbacks in one
platform. Therefore, we carried out a comprehensive literature review and classified it into six
categories based on the algorithms proposed, and investigated their applications in real-world
management, engineering, and health sciences problems, so as to understand the researchers’
current interests and directions in overcoming FNN drawbacks. Our review contributes to the
existing literature not only by summarizing the recent developments in FNN algorithms and
classifying them into six categories according to the nature of algorithms, but also by exploring
the applications of the proposed algorithms in solving real-world management, engineering,
and health sciences problems and demonstrating the great potential for their practical
utilization. Moreover, we propose several interesting and crucial future research directions
regarding FNNs which are believed to be useful for the development of the area.
2.2.1 Survey methodology
2.2.1.1 Source of literature
The objective of the study is to identify and classify the learning algorithms and optimization
techniques that have contributed to improving the generalization performance and learning
speed of FNNs. Therefore, a comprehensive review has been conducted to get in-depth
knowledge of the existing work and to understand researchers’ contributions and work
directions. Furthermore, the authors discuss the future research directions so as to contribute in
strengthening the literature. To accomplish these objectives, the literature surveyed in the study
was explored from seven different sources: IEEE Xplore -IEEE, ScienceDirect- Elsevier,
22
Emerald Insight, arXiv- Cornell University, SpringerLink- Springer, Taylor & Francis and
Google Scholar. The survey is based on articles in journals, conference proceedings, archives,
technical reports, books, and academic lectures. The focus was to select articles published in
the last three decades mainly in the period 1986-2018. However, the articles that contribute
significant knowledge to the existing literature and one out of time frame (For instance, the
year 1985 and earlier) are also included to support and deepen the review.
The research contributions and its applications in FNN are numerous and cannot be covered in
one study. Four keywords that are related to FNN were used to search for articles in the above-
mentioned databases: “generalization performance”, “learning rate”, “overfitting”, and “fixed
and cascade architecture”. Moreover, the combination of keywords was also used to get
relevant articles. The duplicated articles in the databases, non-English language, and matched
keywords but out of scope were discarded. The screening process was limited to articles
belonging to the Q1 category of ranked journals, issued by either “Scientific Journal Rankings
- SJR” or “Journal Citation Reports - JCR” in the year 2018. However, to strengthen the review,
a small number of highly cited conference papers and articles belonging to Q2, Q3, and Q4
journals with more than 500 citations, and articles from other sources (such as online achieves,
books, technical reports, and websites) with more than 100 citations were also considered. All
the searched article’s abstracts and the conclusions were completely reviewed along with the
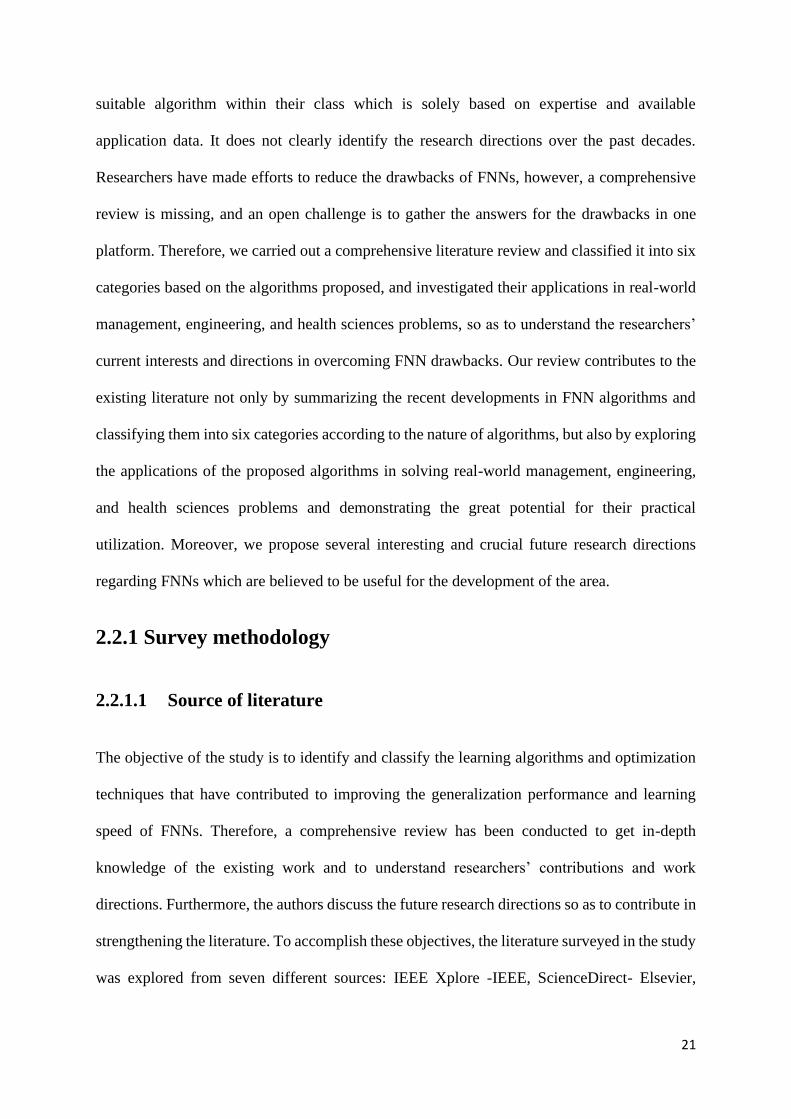
full text to screen high-quality relevant literature. This resulted in a total of 80 articles. Figure
Figure 2.1. Articles distribution
Journal Articles
63 Nos.; 78.75%
Conference Proceedings
10Nos.; 12.50%
arXiv online Archives
3 Nos.; 3.75%
Books
2 No.; 2.50%
Technical Report
1No.; 1.25%
Academic Lecture
1No.; 1.25%
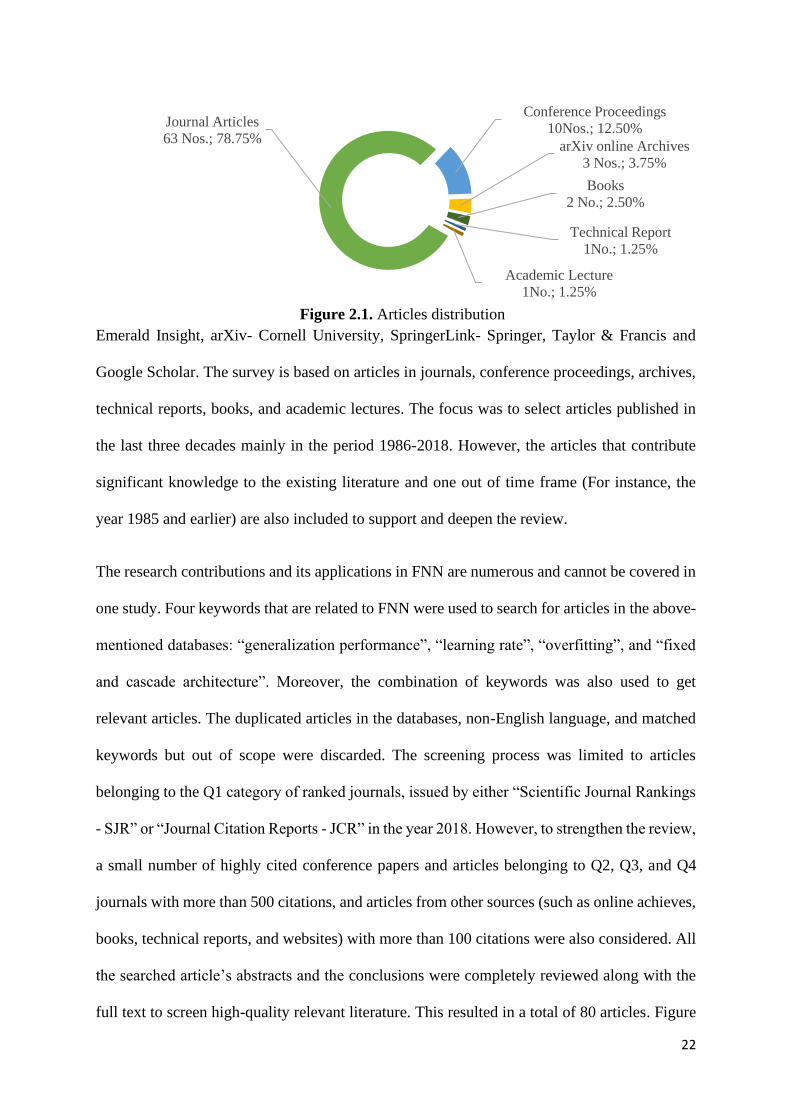
23
2.1 shows the distribution of the articles along with the number and percentage in each
category. In the 80 articles, 63 (78.75%) are journal papers, 10 (12.50%) conference papers, 3
(3.75%) online arXiv archives, 2 (2.50%) books, 1 (1.25%) technical report, and 1 (1.25%)
Table 2.1. Articles source description
Source Papers
(Nos.)
Citation
(Nos.)
1) Journal Article 63 88144
Artificial Intelligence 42 48707
IEEE Transactions on Neural Networks and Learning Systems 19 18778
Journal of Machine Learning Research 2 11513
Neurocomputing 6 8123
Neural Networks 6 5650
IEEE Transactions on Pattern Analysis and Machine Intelligence 3 4411
Artificial Intelligence Review 1 140
Neural Computing and Applications 3 62
Information Sciences 2 30
Multidisciplinary 2 25654
Nature 2 25654
Applied Mathematics 6 6219
Mathematics of Computation 1 3093
Technometrics 1 1752
SIAM Review 1 636
Applied Mathematics and Computation 2 543
Mathematical Programming 1 195
Arts and Humanities (Miscellaneous) 1 3491
Neural Computation 1 3491
Computer Science Applications 7 3226
IEEE Transactions on Cybernetics 2 2762
IEEE Transactions on Industrial Informatics 1 180
IEEE Transactions on Industrial Electronics 1 134
Journal of Chemical Information and Computer Sciences 1 88
IEEE Access 1 32
Industrial Management & Data Systems 1 30
Engineering (Miscellaneous) 1 434
Advances in Engineering Software 1 434
Computer Networks and Communication 2 315
24
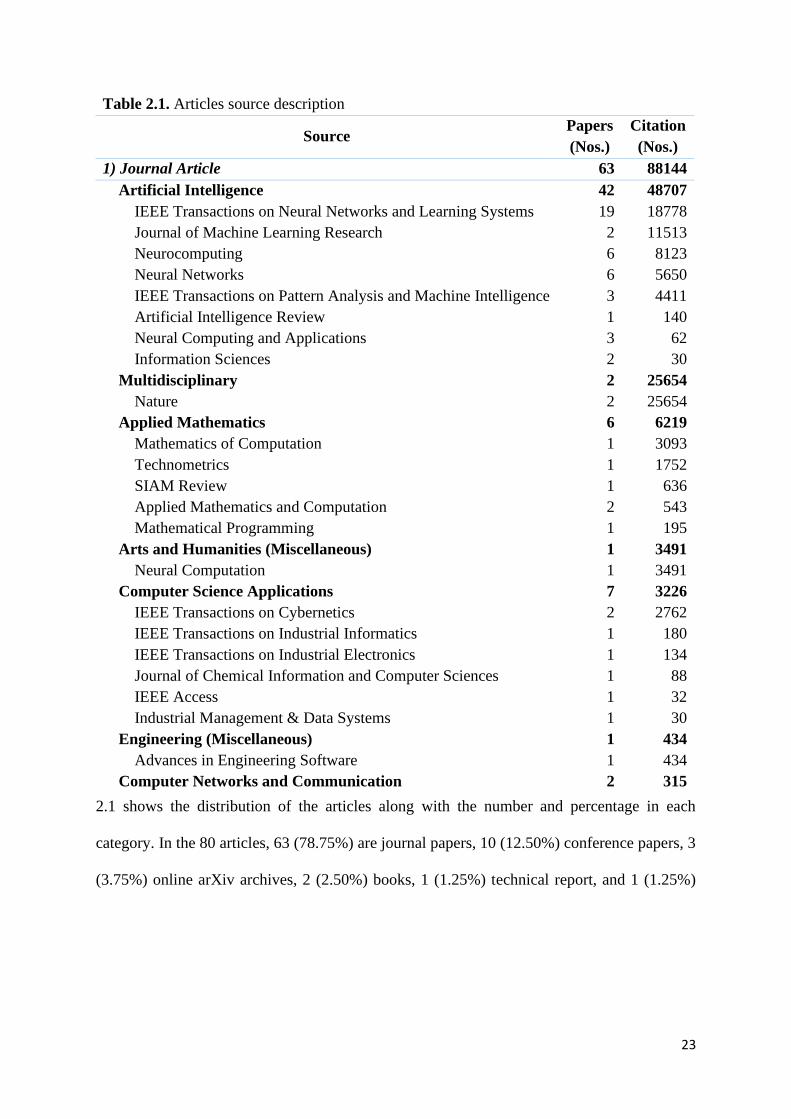
online academic lecture. Table 2.1 lists the journals, conferences, archives, books, technical
reports, and academic lectures used in the literature along with a description of the type,
publisher, the number of papers extracted, and the number of citations. The content of the table
illustrates the importance of screened articles not only in journals but also in the conference
and other sources. The main idea was to include highly cited articles published in reputable
journals. However, a small number of articles from conferences and other sources with a high
citation rate and unique ideas are also considered as a part of a survey to enrich the content.
IEEE Intelligent System 1 261
Neural Processing Letters 1 54
Statistics and Probability 1 76
American Statistician 1 76
Electrical and Electronics Engineering 1 22
IEEE Transactions on Circuits and Systems I: Regular Papers 1 22
2) Conference Proceedings 10 41712
IEEE 4 32574
International Symposium on Micro Machine and Human Science 1 13257
IEEE International Conference on Evolutionary Computation 1 11520
IEEE International Conference on Neural Networks 1 4793
International Joint Conference on Neural Networks 1 3004
MIT Press 4 7492
Advances in neural information processing systems 4 7492
IMLS 1 1054
International Conference on Machine Learning 1 1054
Morgan Kaufmann 1 592
Proceedings of the 1988 connectionist models summer school 1 592
3) arXiv Archive 3 21519
Cornell University Library 3 21519
4) Book 2 14323
The MIT Press 1 14009
Morgan & Claypool Publishers 1 314
5) Report 1 1238
School of Computer Science, Carnegie Mellon University 1 1238
6) Webpage 1 118
Coursera 1 118
Grand Total 80 167054
25
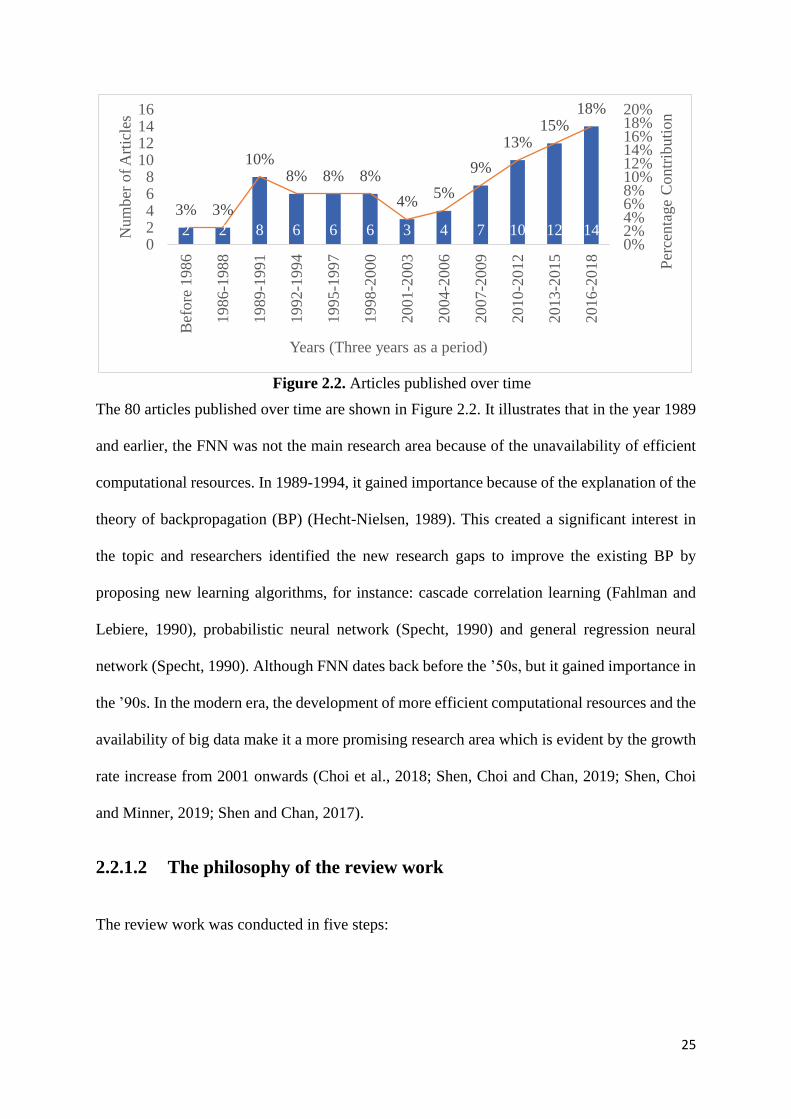
The 80 articles published over time are shown in Figure 2.2. It illustrates that in the year 1989
and earlier, the FNN was not the main research area because of the unavailability of efficient
computational resources. In 1989-1994, it gained importance because of the explanation of the
theory of backpropagation (BP) (Hecht-Nielsen, 1989). This created a significant interest in
the topic and researchers identified the new research gaps to improve the existing BP by
proposing new learning algorithms, for instance: cascade correlation learning (Fahlman and
Lebiere, 1990), probabilistic neural network (Specht, 1990) and general regression neural
network (Specht, 1990). Although FNN dates back before the ’50s, but it gained importance in
the ’90s. In the modern era, the development of more efficient computational resources and the
availability of big data make it a more promising research area which is evident by the growth
rate increase from 2001 onwards (Choi et al., 2018; Shen, Choi and Chan, 2019; Shen, Choi
and Minner, 2019; Shen and Chan, 2017).
2.2.1.2 The philosophy of the review work
The review work was conducted in five steps:
Figure 2.2. Articles published over time
2 2 8 6 6 6 3 4 7 10 12 14
3% 3%
10%8% 8% 8%
4%5%
9%
13%15%
18%
0%2%4%6%8%10%12%14%16%18%20%
02468
10121416
Bef
ore
1986
19
86-1
98
8
1989-1
991
1992-1
994
1995-1
997
1998-2
000
2001-2
003
2004-2
006
2007-2
009
2010-2
012
2013-2
015
2016-2
018 Per
centa
ge
Contr
ibuti
on
Num
ber
of
Art
icle
s
Years (Three years as a period)
26
Step-1) Relevant literature explaining the learning algorithms and optimization techniques
proposed to improve the generalization performance and learning speed of FNN was
identified based on the popular keywords used in FNN.
Step-2) The algorithms were classified into six categories. The algorithms were assigned to a
category based on problem identification, mathematical model, technical reasoning,
and proposed solution.
Step-3) The six categories were further classified into two main Parts. Part I review the two
categories mainly explores learning algorithms, whereas, the remaining four categories
developing optimization algorithms (techniques) are reviewed in Part II.
Step-4) The algorithms are explained with their merits and technical limitations to suggest
future research directions in FNN.
Step-5) The applications of the proposed algorithms in the real-world are identified to show the
success of FNN in management, engineering, and health sciences problem-solving.
2.2.1.3 Classification schemes
The classification scheme in the existing literature surveyed in FNN is mainly focused on the
comparative study of different algorithms within the same class (for instance: constructive
algorithms comparison based on data, etc), studying the application area (for instance: business,
engineering, etc) and specific class surveys (for instance: network ensemble survey, etc). This
study classification is unique as its focus is on learning algorithms and optimization techniques
recommended in the last three decades for improving the generalization performance and
learning speed of FNN. The algorithms are classified into six categories and further divided
into two main parts. The six categories are:
Part I: Learning algorithms (Gradient learning algorithm, Gradient-free learning algorithm)
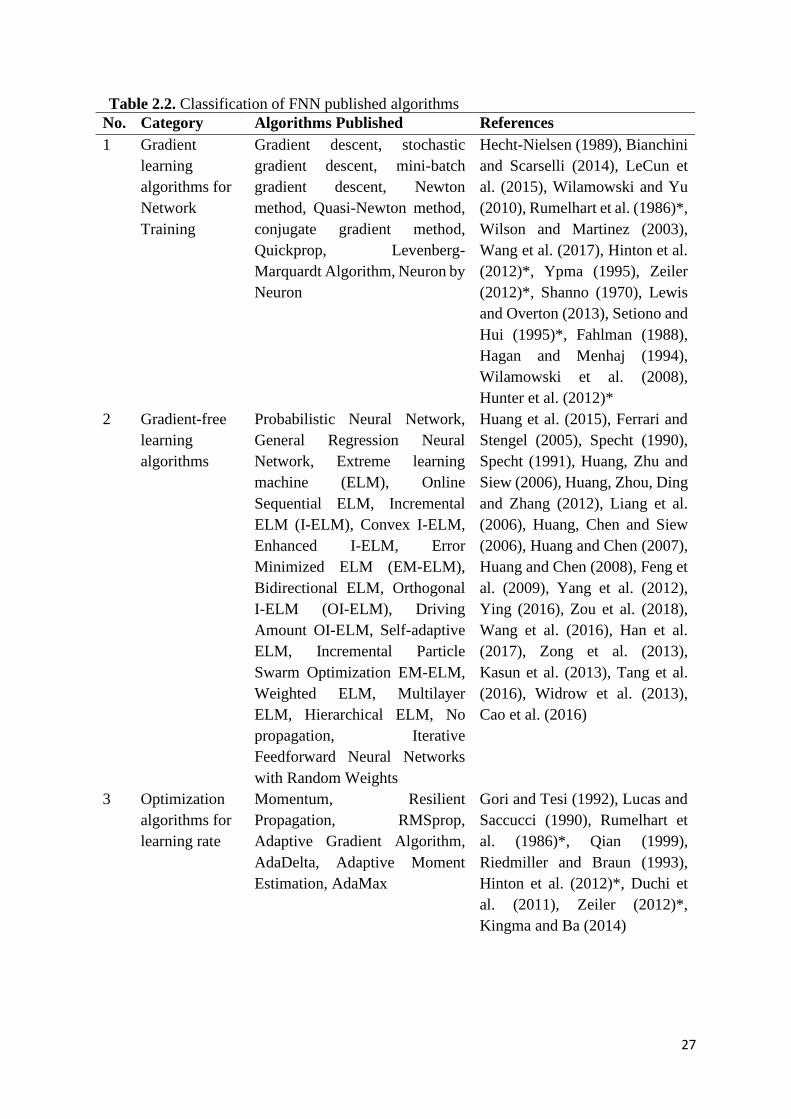
27
Table 2.2. Classification of FNN published algorithms
No. Category Algorithms Published References
1 Gradient
learning
algorithms for
Network
Training
Gradient descent, stochastic
gradient descent, mini-batch
gradient descent, Newton
method, Quasi-Newton method,
conjugate gradient method,
Quickprop, Levenberg-
Marquardt Algorithm, Neuron by
Neuron
Hecht-Nielsen (1989), Bianchini
and Scarselli (2014), LeCun et
al. (2015), Wilamowski and Yu
(2010), Rumelhart et al. (1986)*,
Wilson and Martinez (2003),
Wang et al. (2017), Hinton et al.
(2012)*, Ypma (1995), Zeiler
(2012)*, Shanno (1970), Lewis
and Overton (2013), Setiono and
Hui (1995)*, Fahlman (1988),
Hagan and Menhaj (1994),
Wilamowski et al. (2008),
Hunter et al. (2012)*
2 Gradient-free
learning
algorithms
Probabilistic Neural Network,
General Regression Neural
Network, Extreme learning
machine (ELM), Online
Sequential ELM, Incremental
ELM (I-ELM), Convex I-ELM,
Enhanced I-ELM, Error
Minimized ELM (EM-ELM),
Bidirectional ELM, Orthogonal
I-ELM (OI-ELM), Driving
Amount OI-ELM, Self-adaptive
ELM, Incremental Particle
Swarm Optimization EM-ELM,
Weighted ELM, Multilayer
ELM, Hierarchical ELM, No
propagation, Iterative
Feedforward Neural Networks
with Random Weights
Huang et al. (2015), Ferrari and
Stengel (2005), Specht (1990),
Specht (1991), Huang, Zhu and
Siew (2006), Huang, Zhou, Ding
and Zhang (2012), Liang et al.
(2006), Huang, Chen and Siew
(2006), Huang and Chen (2007),
Huang and Chen (2008), Feng et
al. (2009), Yang et al. (2012),
Ying (2016), Zou et al. (2018),
Wang et al. (2016), Han et al.
(2017), Zong et al. (2013),
Kasun et al. (2013), Tang et al.
(2016), Widrow et al. (2013),
Cao et al. (2016)
3 Optimization
algorithms for
learning rate
Momentum, Resilient
Propagation, RMSprop,
Adaptive Gradient Algorithm,
AdaDelta, Adaptive Moment
Estimation, AdaMax
Gori and Tesi (1992), Lucas and
Saccucci (1990), Rumelhart et
al. (1986)*, Qian (1999),
Riedmiller and Braun (1993),
Hinton et al. (2012)*, Duchi et
al. (2011), Zeiler (2012)*,
Kingma and Ba (2014)
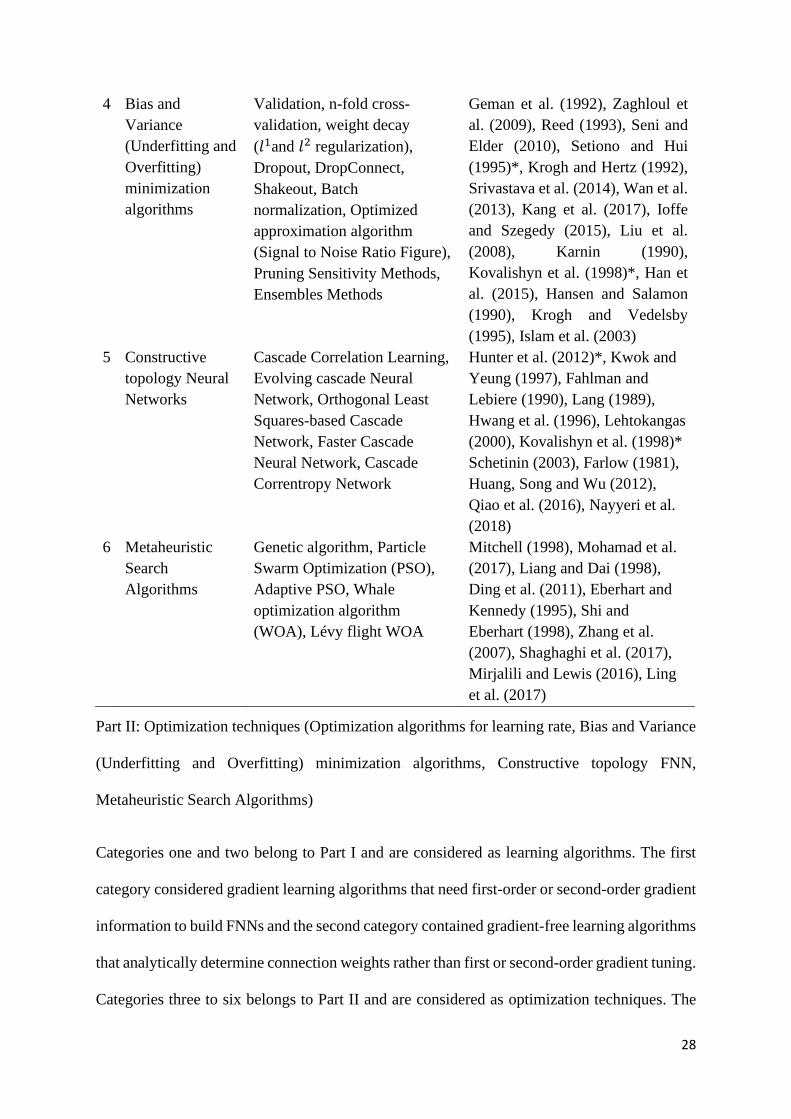
28
Part II: Optimization techniques (Optimization algorithms for learning rate, Bias and Variance
(Underfitting and Overfitting) minimization algorithms, Constructive topology FNN,
Metaheuristic Search Algorithms)
Categories one and two belong to Part I and are considered as learning algorithms. The first
category considered gradient learning algorithms that need first-order or second-order gradient
information to build FNNs and the second category contained gradient-free learning algorithms
that analytically determine connection weights rather than first or second-order gradient tuning.
Categories three to six belongs to Part II and are considered as optimization techniques. The
4 Bias and
Variance
(Underfitting and
Overfitting)
minimization
algorithms
Validation, n-fold cross-
validation, weight decay
(𝑙1and 𝑙2 regularization),
Dropout, DropConnect,
Shakeout, Batch
normalization, Optimized
approximation algorithm
(Signal to Noise Ratio Figure),
Pruning Sensitivity Methods,
Ensembles Methods
Geman et al. (1992), Zaghloul et
al. (2009), Reed (1993), Seni and
Elder (2010), Setiono and Hui
(1995)*, Krogh and Hertz (1992),
Srivastava et al. (2014), Wan et al.
(2013), Kang et al. (2017), Ioffe
and Szegedy (2015), Liu et al.
(2008), Karnin (1990),
Kovalishyn et al. (1998)*, Han et
al. (2015), Hansen and Salamon
(1990), Krogh and Vedelsby
(1995), Islam et al. (2003)
5 Constructive
topology Neural
Networks
Cascade Correlation Learning,
Evolving cascade Neural
Network, Orthogonal Least
Squares-based Cascade
Network, Faster Cascade
Neural Network, Cascade
Correntropy Network
Hunter et al. (2012)*, Kwok and
Yeung (1997), Fahlman and
Lebiere (1990), Lang (1989),
Hwang et al. (1996), Lehtokangas
(2000), Kovalishyn et al. (1998)*
Schetinin (2003), Farlow (1981),
Huang, Song and Wu (2012),
Qiao et al. (2016), Nayyeri et al.
(2018)
6 Metaheuristic
Search
Algorithms
Genetic algorithm, Particle
Swarm Optimization (PSO),
Adaptive PSO, Whale
optimization algorithm
(WOA), Lévy flight WOA
Mitchell (1998), Mohamad et al.
(2017), Liang and Dai (1998),
Ding et al. (2011), Eberhart and
Kennedy (1995), Shi and
Eberhart (1998), Zhang et al.
(2007), Shaghaghi et al. (2017),
Mirjalili and Lewis (2016), Ling
et al. (2017)
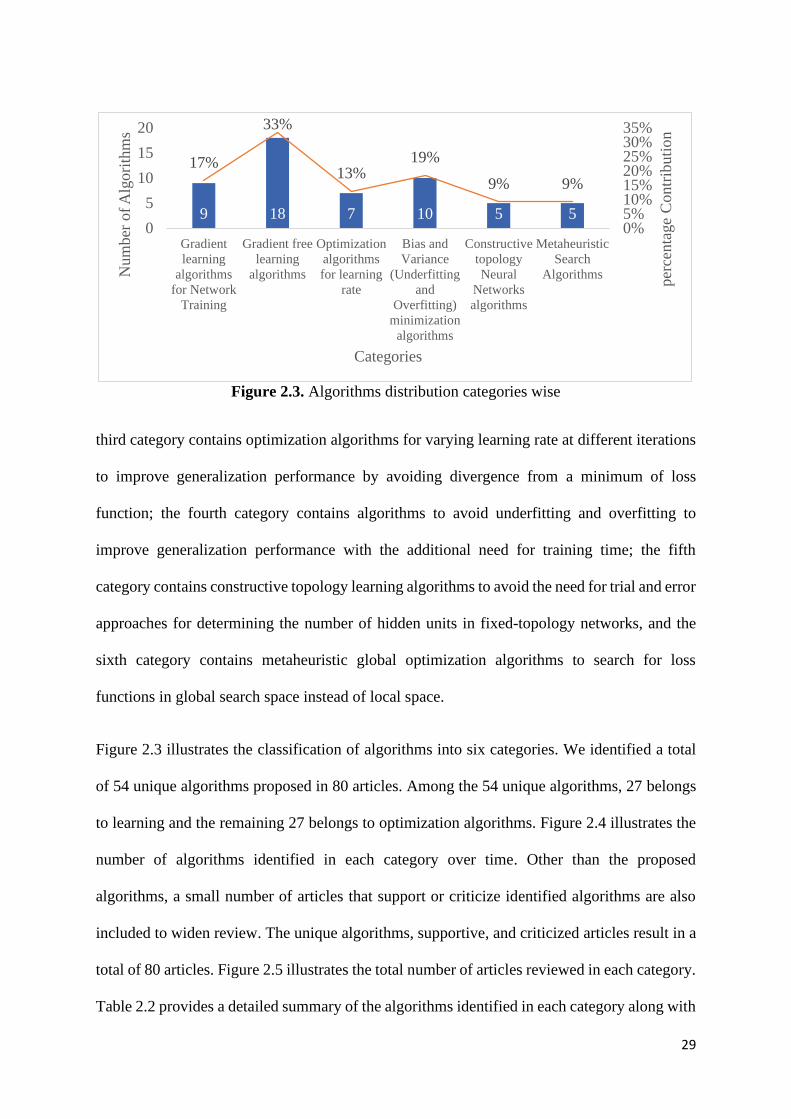
29
third category contains optimization algorithms for varying learning rate at different iterations
to improve generalization performance by avoiding divergence from a minimum of loss
function; the fourth category contains algorithms to avoid underfitting and overfitting to
improve generalization performance with the additional need for training time; the fifth
category contains constructive topology learning algorithms to avoid the need for trial and error
approaches for determining the number of hidden units in fixed-topology networks, and the
sixth category contains metaheuristic global optimization algorithms to search for loss
functions in global search space instead of local space.
Figure 2.3 illustrates the classification of algorithms into six categories. We identified a total
of 54 unique algorithms proposed in 80 articles. Among the 54 unique algorithms, 27 belongs
to learning and the remaining 27 belongs to optimization algorithms. Figure 2.4 illustrates the
number of algorithms identified in each category over time. Other than the proposed
algorithms, a small number of articles that support or criticize identified algorithms are also
included to widen review. The unique algorithms, supportive, and criticized articles result in a
total of 80 articles. Figure 2.5 illustrates the total number of articles reviewed in each category.
Table 2.2 provides a detailed summary of the algorithms identified in each category along with
Figure 2.3. Algorithms distribution categories wise
9 18 7 10 5 5
17%
33%
13%19%
9% 9%
0%5%10%15%20%25%30%35%
0
5
10
15
20
Gradient
learning
algorithms
for Network
Training
Gradient free
learning
algorithms
Optimization
algorithms
for learning
rate
Bias and
Variance
(Underfitting
and
Overfitting)
minimization
algorithms
Constructive
topology
Neural
Networks
algorithms
Metaheuristic
Search
Algorithms
per
centa
ge
Con
trib
uti
on
Num
ber
of
Alg
ori
thm
s
Categories
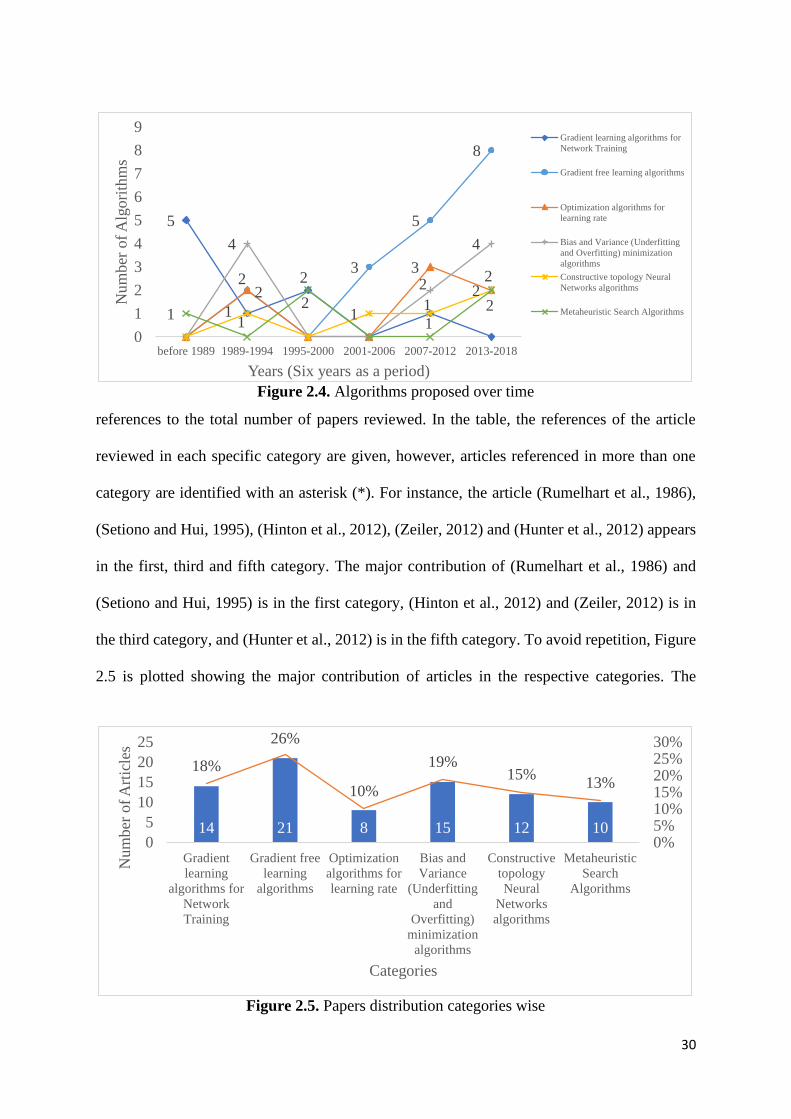
30
references to the total number of papers reviewed. In the table, the references of the article
reviewed in each specific category are given, however, articles referenced in more than one
category are identified with an asterisk (*). For instance, the article (Rumelhart et al., 1986),
(Setiono and Hui, 1995), (Hinton et al., 2012), (Zeiler, 2012) and (Hunter et al., 2012) appears
in the first, third and fifth category. The major contribution of (Rumelhart et al., 1986) and
(Setiono and Hui, 1995) is in the first category, (Hinton et al., 2012) and (Zeiler, 2012) is in
the third category, and (Hunter et al., 2012) is in the fifth category. To avoid repetition, Figure
2.5 is plotted showing the major contribution of articles in the respective categories. The
Figure 2.4. Algorithms proposed over time
5
12
1
23
5
8
2
3
2
4
2
4
11
1 21
2 2
0
1
2
3
4
5
6
7
8
9
before 1989 1989-1994 1995-2000 2001-2006 2007-2012 2013-2018
Num
ber
of
Alg
ori
thm
s
Years (Six years as a period)
Gradient learning algorithms for
Network Training
Gradient free learning algorithms
Optimization algorithms for
learning rate
Bias and Variance (Underfitting
and Overfitting) minimization
algorithms
Constructive topology Neural
Networks algorithms
Metaheuristic Search Algorithms
Figure 2.5. Papers distribution categories wise
14 21 8 15 12 10
18%
26%
10%
19%15%
13%
0%5%10%15%20%25%30%
0
5
10
15
20
25
Gradient
learning
algorithms for
Network
Training
Gradient free
learning
algorithms
Optimization
algorithms for
learning rate
Bias and
Variance
(Underfitting
and
Overfitting)
minimization
algorithms
Constructive
topology
Neural
Networks
algorithms
Metaheuristic
Search
Algorithms
Num
ber
of
Art
icle
s
Categories
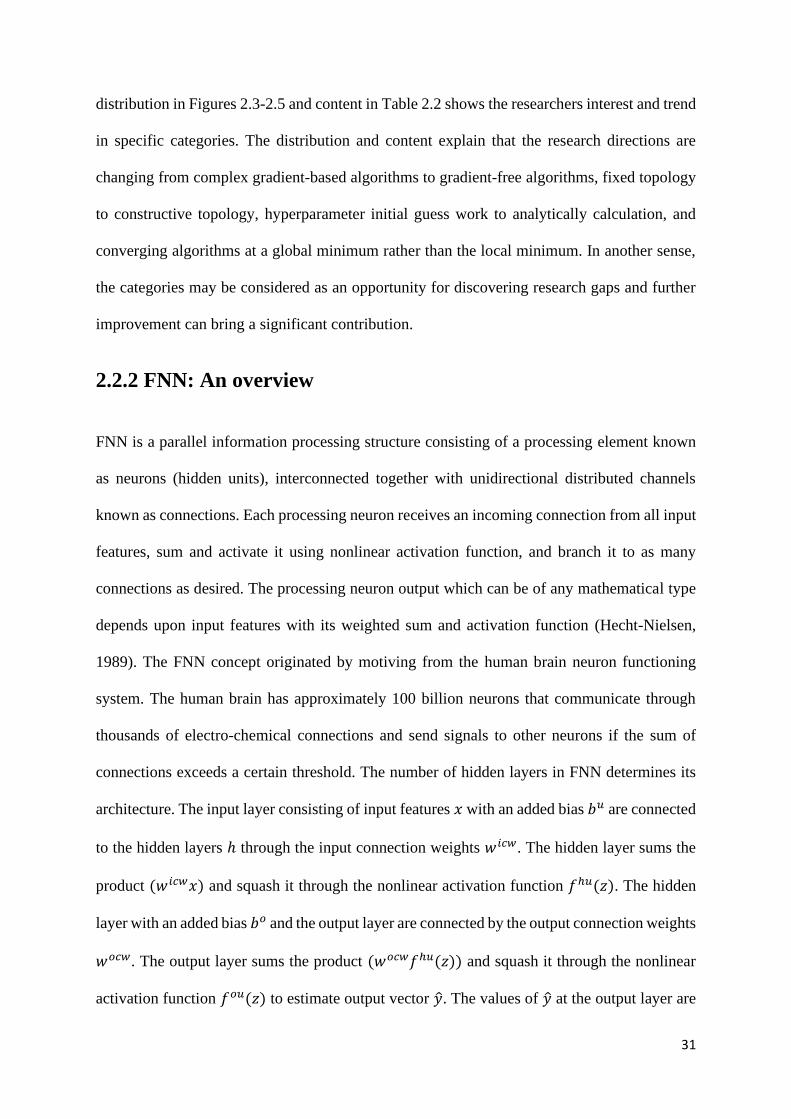
31
distribution in Figures 2.3-2.5 and content in Table 2.2 shows the researchers interest and trend
in specific categories. The distribution and content explain that the research directions are
changing from complex gradient-based algorithms to gradient-free algorithms, fixed topology
to constructive topology, hyperparameter initial guess work to analytically calculation, and
converging algorithms at a global minimum rather than the local minimum. In another sense,
the categories may be considered as an opportunity for discovering research gaps and further
improvement can bring a significant contribution.
2.2.2 FNN: An overview
FNN is a parallel information processing structure consisting of a processing element known
as neurons (hidden units), interconnected together with unidirectional distributed channels
known as connections. Each processing neuron receives an incoming connection from all input
features, sum and activate it using nonlinear activation function, and branch it to as many
connections as desired. The processing neuron output which can be of any mathematical type
depends upon input features with its weighted sum and activation function (Hecht-Nielsen,
1989). The FNN concept originated by motiving from the human brain neuron functioning
system. The human brain has approximately 100 billion neurons that communicate through
thousands of electro-chemical connections and send signals to other neurons if the sum of
connections exceeds a certain threshold. The number of hidden layers in FNN determines its
architecture. The input layer consisting of input features 𝑥 with an added bias 𝑏𝑢 are connected
to the hidden layers ℎ through the input connection weights 𝑤𝑖𝑐𝑤. The hidden layer sums the
product (𝑤𝑖𝑐𝑤𝑥) and squash it through the nonlinear activation function 𝑓ℎ𝑢(𝑧). The hidden
layer with an added bias 𝑏𝑜 and the output layer are connected by the output connection weights
𝑤𝑜𝑐𝑤. The output layer sums the product (𝑤𝑜𝑐𝑤𝑓ℎ𝑢(𝑧)) and squash it through the nonlinear
activation function 𝑓𝑜𝑢(𝑧) to estimate output vector �̂�. The values of �̂� at the output layer are

32
compared with target vector 𝑦 and the loss function 𝐸 is determined. These all steps proceed
in a forward phase and known as the forward propagation. This can be expressed
mathematically as:
�̂� = 𝑓𝑜𝑢(𝑤𝑜𝑐𝑤𝑓ℎ𝑢(𝑤𝑖𝑐𝑤𝑥 + 𝑏𝑢) + 𝑏𝑜) (2.1)
Such that:
𝑓(𝑧) =
1
1 + 𝑒−𝑧
(2.2)
Equation (2.2) is a commonly used type of nonlinear activation function known as the sigmoid
activation function. Other various types of activation functions are differentiable such as
hyperbolic tangent, rectified linear unit, leaky rectified linear unit, SoftMax and many others,
and nondifferentiable such as a threshold and many others. The suitable choice of activation
function in the hidden unit changes with the application problem under consideration. The FNN
attempt to minimize 𝐸 of the network by accomplishing �̂� approximately equal to 𝑦:
𝐸 =1
𝑚∑(�̂�ℎ − 𝑦ℎ)
2
𝑚
ℎ=1
(2.3)
At each instance ℎ the error 𝑒ℎ can be expressed as:
𝑒ℎ = �̂�ℎ − 𝑦ℎ (2.4)
If 𝐸 is larger than predefined expected error ε, the connection weights are backpropagated by
taking the derivative of 𝐸 with respect to each weight in the direction of descending gradient.
This update of the connection weights in the gradient descent direction is such that �̂� starts to
become closer to 𝑦. The backward steps to calculate gradient information and the updated
weight to minimize the error function is known as backpropagation (BP). The forward
33
propagation and backpropagation complete one iteration 𝑖 and are known as FNN training.
After each iteration, the error function 𝐸𝑖 is recalculated and compared with 𝐸𝑖−1. If 𝑖 reaches
to its predefined maximum limit or 𝐸𝑖 converges/starts increasing the training is stopped, else
it is continued. The training of FNN is influenced by several reasons as highlighted in the
introduction section and may be overcome by various experimental trial and error works with
appropriate learning algorithms and optimization techniques for fast and efficient convergence.
2.2.3 Learning algorithms and applications
In this section, the authors made an effort to explain FNN learning algorithms merits and
technical limitations in order to understand the FNN drawbacks and needed user expertise, so
as to identify research gaps and future directions. The proposed algorithms in the selected
literature were reviewed to understand the inspiration, research gaps, merits, limitations, and
application areas. In current practice, a single algorithm in FNN is not sufficient for all types
of applications. There is always a trade-off between network generalization performance and
learning speed. Some algorithms have the advantage of being more efficient than others but
may be constrained by memory requirements, complex architecture, and/or more learning time.
Since the early FNN development, many improvements have been made and many of them are
mentioned below:
2.2.3.1 Gradient learning algorithms for network training
The first category is the learning algorithms proposed based on the BP gradient information
concept, which is considered the reason for creating significant interest in the FNN topic. The
BP gradient learning algorithms can be further subcategorized into two types: first-order and
second-order. The first-order gradient trains the FNN by calculating the gradient information
and updated weight to reach a minimum of a loss function. The first-order derivative of the
34
error with respect to weight is calculated at the output layer at each iteration and is distributed
back to the whole network. However, the first order BP is considered slow because of the
computation of the first-order gradient information at each iteration. This increases the learning
time and possibility of the algorithm to be stuck in a local minimum. Researchers made efforts
to improve the learning speed by incorporating second-order gradient information to reach the
loss function faster. Wilamowski and Yu (2010) explained that first-order learning methods
might need an excessive number of hidden units and iterations for convergence which can
reduce the generalization performance for unseen data. Whereas second-order learning
algorithms are powerful in learning, but the complexity increases with increasing network size.
A lot of computational memory is needed to store the Jacobian 𝐉 and Hessian Matrix 𝐇𝐧 along
with their inverses, which can make it difficult for large training datasets.
a) First-order gradient algorithms
The popular and well known first-order learning algorithms among the BP family class is
Gradient descent (GD). It backpropagates the error with respect to connection weights 𝑤
through layers to minimize a loss function 𝐸 until it converges to minimal error (Rumelhart et
al., 1986) :
∇𝐸 =𝜕𝐸
𝜕𝑤𝑖=
𝜕𝐸
𝜕𝑜𝑢𝑡𝑖
𝜕𝑜𝑢𝑡𝑖𝜕𝑛𝑒𝑡𝑖
𝜕𝑛𝑒𝑡𝑖𝜕𝑤𝑖
(2.5)
where ∇𝐸 is a partial derivative of the error with respect to weight 𝑤, 𝑜𝑢𝑡𝑖 is the activation
output and 𝑛𝑒𝑡𝑖 is the weighted sum of inputs of the hidden unit. The updated weight 𝑤𝑖+1
needed for the next iteration can be expressed as:
𝑤𝑖+1 = 𝑤𝑖−∝ ∇𝐸 (2.6)
35
where ∝ is a learning rate hyperparameter. For the sake of simplicity in this study, the
connection weights 𝑤 in the equations refer to all types of connection weights in the network,
unless otherwise specified. The GD convergence is considered to be slow because the loss
function is computed based on the whole training dataset. An increase in data size makes it
slower and more time consuming for large application datasets (Wilson and Martinez, 2003).
Therefore, an improved form of GD known as Stochastic GD (SGD) was proposed to compute
the gradient on each training data instance. If the loss function is convex, it converges faster
than GD to a global minimum, otherwise, a local minimum is guaranteed (Wang et al., 2017).
The issue with SGD is that its convergence is not smooth compared to GD and overshoots
during training on some iterations, which may be controlled to some extent by adjustment of
learning rate. The drawbacks of both GD and SGD can be overcome by Mini Batch GD that
takes equal size mini-batches 𝑁 of training data instead of whole training data or single training
instance. Mini batch SD is more favorable due to its hybrid characteristics: a stable and better
convergence rate (Hinton et al., 2012).
For GD:
𝑤𝑖+1 = 𝑤𝑖−∝ ∇𝐸, (𝑥, 𝑎) (2.7)
For SGD:
𝑤𝑖+1 = 𝑤𝑖−∝ ∇𝐸, (𝑥ℎ, 𝑎ℎ) (2.8)
For Mini batch GD:
𝑤𝑖+1 = 𝑤𝑖−∝ ∇𝐸, (𝑥ℎ:ℎ+𝑁 , 𝑎ℎ:ℎ+𝑁) (2.9)
36
The drawbacks of first-order GD and its variant algorithms (SGD and Mini batch GD) are that
the number of iterations comparatively increases which makes them far slower and liable to be
stuck at a local minimum.
b) Second-order gradient algorithms
The convergence problem of the first-order gradient was improved by applying the second-
order form. The Newton method (NM), a second-order derivative, was proposed to increase the
convergence by modifying GD to the second-order Hessian inverse matrix 𝐇𝐧−𝟏 along with
the first-order ∇𝐸 to take larger steps towards the minimum of an objective function (Ypma,
1995):
𝑤𝑖+1 = 𝑤𝑖−∝ 𝐇𝐧−𝟏∇𝐸 (2.10)
NM makes use of the second-order 𝐇𝐧 and its inverse 𝐇𝐧−𝟏 to minimize the loss function
which makes it computationally expensive and unfeasible for real large model applications
(Zeiler, 2012). The small networks with fewer parameters may be trained with NM to take
advantage of the better convergence speed compared to GD. The Quasi-Newton method (quasi
NM) was proposed to address the drawback of NM and simplified by approximating the inverse
of the 𝐇𝐧 from the first order derivative. It updates the approximated 𝐇𝐧 and its inverse 𝐇𝐧−𝟏
after each iteration which makes it computationally less expensive compared to NM (Shanno,
1970). Among several techniques Broyden–Fletcher–Goldfarb–Shanno (BFGS) has gained
much popularity in applications (Lewis and Overton, 2013). It computes 𝐇𝐧 and 𝐇𝐧−𝟏
expressed as:
𝐇𝐧𝐢+𝟏 = 𝐇𝐧𝐢 +𝑜𝑖𝑜𝑖
𝑇
𝑜𝑖𝑇𝜎𝑖
−𝐇𝐧𝐢𝜎𝑖𝜎𝑖
𝑇𝐇𝐧𝐢𝑻
𝜎𝑖𝑇𝐇𝐧𝐢𝜎𝑖
(2.11)
Similarly, it's inverse 𝐇𝐧−𝟏can be calculated from the Sherman-Morrison formula:
37
𝐇𝐧𝐢+𝟏−𝟏 = (𝐼 −
𝜎𝑖𝑜𝑖𝑇
𝑜𝑖𝑇𝜎𝑖)𝐇𝐧𝐢
−𝟏 (𝐼 −𝑜𝑖𝜎𝑖
𝑇
𝑜𝑖𝑇𝜎𝑖) +
𝜎𝑖𝜎𝑖𝑇
𝑜𝑖𝑇𝜎𝑖
(2.12)
Such that:
𝑜𝑖 = ∇𝐸𝑖+1 − ∇𝐸𝑖 (2.13)
𝜎𝑖 = 𝑤𝑖+1 − 𝑤𝑖 (2.14)
𝑤𝑖+1 = 𝑤𝑖+∝ 𝑑𝑖 (2.15)
𝑑𝑖 = −𝐇𝐧𝐢−𝟏∇𝐸𝑖 (2.16)
The algorithm is initialized by the initial value of 𝑤0 and 𝐇𝐧0. Mostly, 𝐇𝐧0 is initially given
the value of the identity matrix 𝐇𝐧0 = 𝐼. The algorithm first computes the position 𝑑0, as
shown in Equation (2.16), from the initial inverse 𝐇𝐧𝟎−𝟏 and ∇𝐸0, then determines new weights,
as shown in Equation (2.15), based on optimal step size ∝. The change in weights 𝜎𝑖, as shown
in Equation (2.14), and change in the first-order derivative 𝑜𝑖, as shown in Equation (2.13), are
used to approximate 𝐇𝐧 and its inverse 𝐇𝐧−𝟏, as shown in Equation (2.11) and (2.12),
respectively. This algorithm continues until 𝑤𝑖 converges. The quasi NM is more efficient than
the NM but requires computational memory which limits its applicability to medium-sized
problems. To overcome the memory problem and contribute to improving the convergence rate
(Setiono and Hui, 1995), a conjugate gradient method (CG) was proposed. For a conjugate, the
gradient of the two vectors needs to be orthogonal to reach a minimum of the cost function. If
not orthogonal, it means the second vector needs to travel along the previous vector to be nearer
to a minimum point. Mostly, in GD, it takes slightly larger steps and deviates from the minimal
point. The objective of conjugate gradient descent is to take a step along the gradient so that
38
the next gradient vector should be orthogonal and nearer to zero error. The first orthogonal
vector 𝑑0 can be computed from the initial guess such that:
𝑑0 = ∇𝐸0 (2.17)
The next orthogonal vector 𝑑𝑖+1 can be expressed as:
𝑑𝑖+1 = ∇𝐸𝑖+1 + 𝛽𝑑𝑖 (2.18)
where 𝛽 is used to calculate new orthogonal vector direction and is known as a conjugate
hyperparameter. The weights are updated as per below rule:
𝑤𝑖+1 = 𝑤𝑖+∝ 𝑑𝑖 (2.19)
The conjugate gradient descent iteratively finds the best orthogonal gradient vector based on
the previous vector with an inner product equal to zero and then updates the weight parameters.
The advantage of CG over GD is that it converges faster but compared to other methods such
as quasi NM and Levenberg Marquardt (LM), its convergence rate is lower. In terms of
memory, due to its second-order, it needs more memory as compared to GD and less memory
compared to quasi NM and LM (Hagan and Menhaj, 1994). To overcome the problem of both
GD slow convergence and second-order gradient algorithms memory, Quickprop (QP) was
proposed. QP is a second-order iterative learning algorithm based on Newton’s method used
to find a minimum of the loss function. The purpose of QP development was to speed up the
convergence process by taking much larger steps to reach a minimum of the loss function rather
than GD infinitesimal small steps in the weight space (Fahlman, 1988). The algorithm proceeds
like GD, but for each weight, it keeps a copy of ∇𝐸𝑖−1and ∆𝑤𝑖−1:
∆𝑤𝑖 =∇𝐸𝑖
∇𝐸𝑖−1 − ∇𝐸𝑖∆𝑤𝑖−1 (2.20)
39
It shows that error vs. weight can be approximated by an upward parabola and change in the
slope of the error curve by each weight is not affected by all the other weights that are changing
at the same time. For each weight, it computes the gradient change and weight changes to
determine the parabola: and rapidly jumps to a minimum of this parabola.
To make learning faster, the Levenberg-Marquardt Algorithm (LM) was proposed by
combining both Gauss-Newton (GN) and GD to compute the best gradient direction. It is a
method to solve nonlinear least-squares problems to minimize the sum of the squared error
(Hagan and Menhaj, 1994). Instead of directly computing the 𝐇𝐧 it works with gradient vector
and 𝐉. The gradient vector ∇𝐸 of the loss function can be computed as:
∇𝐸 = 2𝐉𝑇𝑒 (2.21)
The 𝐇𝐧 can be approximated from the equation below:
∇2𝐸 = 𝐇𝐧 = 2𝐉𝑇𝐉 (2.22)
The weight parameter improvement process in LM is iterative such as:
∆𝑤𝑖 = [𝐉𝑇𝐉 + 𝜇𝐼]−1𝐉𝑇𝑒 (2.23)
where 𝐼 is an identity matrix and 𝜇 is damping hyperparameter factor. The 𝜇 is adjusted in each
iteration to create a balance between the GN and GD methods. If the objective function
achievement is fast, 𝜇 is divided by some factor to bring the algorithm closer to GN and if
objective function achievement is slow in each iteration, 𝜇 is multiplied by some factor so as
to move towards GD. In many applications, LM is very fast and converges to the local
minimum rapidly, which may not be the global minimum. The LM has the disadvantage that it
cannot be used with other loss functions such as cross-entropy and cannot be applied to
constructive types of neural networks (Hunter et al., 2012). The 𝐉 becomes large and needs a
40
lot of memory with an increase in network size, limiting its application in a large dataset.
Therefore the learning speed of LM is less evident compared to GD when the network size
increases (Wilamowski and Yu, 2010). The LM limits its application to a fixed topology neural
network. Therefore, Neuron by Neuron (NBN) was proposed to compute the gradient vector
and the 𝐉 for arbitrarily constructive neural networks. Wilamowski et al. (2008) highlighted
that several improvements have been proposed in second-order learning algorithms, but much
better results can be achieved from Newton and LM methods. The NBN was proposed to
simplify the Jacobian calculation and make it workable for constructive algorithms. The
Jacobian is expressed in a square matrix of the first-order partial derivative:
𝐉 =𝜕𝑒
𝜕𝑤 (2.24)
NBN calculates the Jacobian in gradient vector form instead of the matrix by performing: 1)
Forward computation, 2) Backward computation, and finally, 3) Calculating the Jacobian
elements. In the forward computation, the inputs are processed to get the neuron output, which
is further processed to get the target output. During forward computation, the value of the slope
of the neuron activation function is stored for the backward stage. In the backward step, the
Jacobian element is computed by multiplying the neuron delta with its slope and input weights.
Finally, instead of using the 𝐉 to store values, they are summed into a gradient vector:
∇𝐸 =𝜕𝑒
𝜕𝑤𝑒 (2.25)
This enables NBN to be used with the constructive algorithm but with the additional cost of
more memory requirement compared to LM. Hunter et al. (2012) argued that NBN is not
perfect, but it can compete with other similar algorithms. Their experimental work showed that
NBN achieved much better results than GD and almost similar results to LM.
41
c) Application of Gradient Learning Algorithms
Various applications of gradient learning algorithms are explained and listed in Appendix A.
2.2.3.2 Gradient free algorithms
The gradient learning algorithms randomly assign connection weights to the network and
iteratively tune them to get the optimal weight for a network with better error minimization
capability. The disadvantages associated with gradient learning algorithms are that they require
user expertise to build an optimal FNN. A better choice of hyperparameters such as learning
rate, momentum, regularization, and initial weight may improve the convergence but needs a
lot of trial and error approach to get the best possible parameters. This may cause gradient
learning algorithms to trap the FNN at a local minimum which may be far away from the global
minimum and may affect the generalization performance. In terms of convergence rate, it can
be increased by assigning a large learning rate, however, the algorithm will become unstable,
whereas for a low learning rate it may converge slowly and may take even hours, days, or
months to solve a large dataset with complex patterns.
Researchers made an extensive effort to improve the gradient learning algorithms. Huang et al.
(2015) comment that improvement in gradient learning leads to faster learning speed and better
generalization performance, but still most of them cannot guarantee a global solution.
Researchers proposed that the issues associated with gradient learning algorithms can be fixed
in a state-of-the-art way by learning FNN without gradient learning algorithms, known as
gradient-free learning in the forward steps. The gradient-free algorithms eliminate the need for
chain delta rule to calculate the derivative of the loss function with respect to each weight and
updating them for the next iteration. Some of the advantages of gradient-free algorithms are:
1) They are simple, fast, and do not need complex hyperparameter adjustments, 2) no need for
42
backpropagating error, and 3) can work directly with both differentiable and non-differentiable
activation functions (Ferrari and Stengel, 2005). The gradient-free algorithms are useful in that
they reduce training time significantly, however, a drawback is that it increases network
complexity. The number of hidden unit’s generation increases many times which may cause
overfitting. The following are popular algorithms that eliminate the use of gradient information.
a) Probability and General Regression
Probabilistic Neural Network (PNN) was proposed for classification problems (Specht, 1990),
and, General Regression Neural Network (GRNN) for regression problems (Specht, 1991).
Both algorithms were proposed to address the slowness of the backpropagation FNN (BPNN)
by doing one pass learning. They are similar in structure and do not need iterative tuning and
work in a highly parallel structure. PNN finds the decision boundaries between pattern, whereas
GRNN estimates the continuous dependent variable. The network architecture consists of four
layers: input, pattern, summation, and output. The output layer can be expressed as:
�̂�ℎ =∑𝑦ℎ 𝑒
−(𝑑ℎ2
2𝜎2)
∑𝑒−(𝑑ℎ2
2𝜎2)
(2.26)
where 𝑑ℎ2 is Euclidean distance and 𝑒
−(𝑑ℎ2
2𝜎2) is the activation function. The best value of kernel
𝜎 is estimated by a holdout or validation method. PNN and GRNN are considered faster than
the BPNN and learn in one pass, which means the forward direction. The major drawback is
that it requires more memory space compared to BPNN and separate algorithms are built for
classification and regression problems.
b) Extreme Learning Machine
43
Huang, Zhu, et al. (2006) mentioned that the learning speed of traditional FNN is far slower
which limits its applicability in many application areas. Two possible reasons are: 1) Slow
learning ability of gradient-based BP algorithms, and 2) Iteratively tuning of all parameters in
the network by gradient learning algorithms. They proposed a simple algorithm known as the
Extreme learning machine (ELM) for a single layer FNN (SLFN). It randomly chooses hidden
units 𝐻, and analytically determines only the output connection weights 𝑤𝑜𝑐𝑤. 𝐻 is considered
in a linear relationship to the output unit 𝑦 and 𝑤𝑜𝑐𝑤 are calculated from the expression:
𝐻𝑤𝑜𝑐𝑤 = 𝑦ℎ (2.27)
𝑤𝑜𝑐𝑤 = 𝐻ϯ𝑦ℎ (2.28)
where 𝐻ϯ= (𝐻𝑇𝐻)−1𝐻𝑇 is Moore-Penrose generalized inverse of 𝐻. It steps forward, and no
BP gradient information is needed to compute weights. Their experimental results based on
artificial and real-world regression and classification problems demonstrated that ELM can
achieve better generalization performance in most cases and learn many times faster than
traditional learning algorithms of FNN. In addition, more stable results and better
generalization can be achieved by adding positive value (1/𝜆) in the diagonal of (𝐻𝐻𝑇) or
(𝐻𝑇𝐻) such that (Huang, Zhou, et al., 2012):
when ℎ < 𝑟:
𝑤𝑜𝑐𝑤 = 𝐻𝑇(1
𝜆+ 𝐻𝐻𝑇)−1𝑦ℎ (2.29)
when ℎ > 𝑟:
𝑤𝑜𝑐𝑤 = (1
𝜆+ 𝐻𝑇𝐻)−1𝐻𝑇𝑦ℎ (2.30)
44
where 𝑟 is the number of hidden units. ELM limits its applicability to batch learning, whereas,
one by one or chunk by chunk data (mini-batches) of fixed or varying size can be learned
through Online Sequential ELM (OS-ELM) algorithm (Liang et al., 2006). The OS-ELM
working methodology idea is similar to ELM. The hidden units’ parameters are randomly
generated, and output weights are analytically calculated. Unlike other GD sequential
algorithms with many hyperparameters, OS-ELM only specifies the number of hidden units.
Like BP, the limitation of ELM is that the optimal number of hidden units are selected based
on the trial and error approach. The ELM is learned with some initial guess of the hidden units
and then experimental trials are performed with different hidden units to select the best optimal
network having a hidden unit capable of maximum error reduction. Although the learning
speed of ELM is much faster than the traditional BP, however the initial setup to find optimal
hidden units may increase the total trial and error time (Han et al., 2017). Incremental ELM (I-
ELM), an extension of ELM, was proposed to solve the problem of hidden units allocation
(Huang, Chen, et al., 2006). The key difference is that I-ELM is a constructive topology type,
whereas ELM is a fixed topology type FNN. I-ELM initializes with one hidden unit and adds
the hidden unit one by one until the error converges or maximum hidden units are achieved.
The output weight for the new hidden unit can be computed from the expression:
𝑤𝑟𝑜𝑐𝑤 =
𝐸𝐻𝑟𝑇
𝐻𝑟𝐻𝑟𝑇 (2.31)
Initially, the error 𝐸 is set to 𝑦ℎ such that 𝐸=𝑦ℎ, and after adding a new hidden unit, the error
is recalculated as:
𝐸 = 𝐸 − 𝑤𝑟𝑜𝑐𝑤𝐻𝑟 (2.32)

45
Adding hidden units one by one results in redundant hidden units in I-ELM which will make
network size large and complex. Some of the hidden unit’s contribution to error reduction
might be very low and can be omitted. Efforts were made to compact the I-ELM network size
without losing generalization accuracy. Convex I-ELM (CI-ELM) was proposed to recalculate
the 𝑤𝑜𝑐𝑤 based on Barron’s convex optimization technique to improve the convergence rate
of I-ELM (Huang and Chen, 2007). In CI-ELM, 𝑤𝑟𝑜𝑐𝑤 for the randomly generated hidden unit
is calculated as:
𝑤𝑟𝑜𝑐𝑤 =
𝐸. [𝐸 − (𝐹 − 𝐻𝑟]𝑇
[𝐸 − (𝐹 − 𝐻𝑟]. [𝐸 − (𝐹 − 𝐻𝑟]𝑇 (2.33)
where 𝐹 = 𝑦 is the target vector. It recalculates the 𝑤𝑜𝑐𝑤 of all existing hidden units if 𝑟 > 1,
and error as expressed below:
𝑤𝑖𝑜𝑐𝑤 = (1 − 𝑤𝑟
𝑜𝑐𝑤)𝑤𝑖𝑜𝑐𝑤 (2.34)
𝐸 = (1 − 𝑤𝑟𝑜𝑐𝑤)𝐸 − 𝑤𝑟
𝑜𝑐𝑤(𝐹 − 𝐻𝑟) (2.35)
CI-ELM can converge faster with more compact architecture while maintaining I-ELM
simplicity and efficiency. Similarly, Enhanced I-ELM (EI-ELM) was proposed to compact I-
ELM by adding some sets of candidate units and selecting a candidate unit as a hidden unit
having a maximum capability of error reduction (Huang and Chen, 2008). The hidden unit
addition in I-ELM might take it nearer or farther away from the loss function. The hidden units
farther away from the loss function may not contribute to error reduction and can be omitted.
The EI-ELM adds some candidate units and one nearer to the loss function is selected as a new
hidden unit and added to the network. In such a case, the number of hidden units in EI-ELM
46
will be less and the network size will be more compact compared to I-ELM with the same
amount of training time.
Feng et al. (2009) addressed two main issues of ELM: 1) How to choose optimal hidden units
in ELM, and 2) whether ELM computation complexity can be further reduced given the large
training examples requiring many hidden units. The issues were addressed by proposing Error
Minimized ELM (EM-ELM) to automatically determine the number of hidden units rather than
the trial and error approach. It works by adding hidden units one by one or group by group
(with varying group size) and updates the output weights in a fast-recursive way. The advantage
of EM-ELM is that it reduces the computational complexity by only updating the output
weights incrementally each time rather than ELM, which needs to recalculate the entire output
weights when the architecture is changed. Yang et al. (2012) added that the learning speed of
ELM and I-ELM are faster, however, there are two major unsolved problems: 1) For ELM, the
selection of an optimal number of hidden units is still unknown and trial and error approaches
are adopted, and 2) I-ELM has solved the problem of ELM by adding hidden units one by one.
However, the learning speed of I-ELM increases many times compared to ELM. Yang et al.
(2012) proposed an incremental learning algorithm known as Bidirectional ELM (B-ELM) to
compact the I-ELM architecture without affecting learning effectiveness. In B-ELM, some of
the hidden units are not randomly generated, and it tries to find the best hidden unit parameters
(𝑤𝑖𝑐𝑤, 𝑏𝑢) to reduce 𝐸 as quickly as possible. In B-ELM, with the hidden unit 𝑟𝜖 {2𝑛 +
1, 𝑛𝜖𝒁}, the hidden units parameters are randomly generated similar to I-ELM, whereas, when
the hidden unit 𝑟𝜖 {2𝑛, 𝑛𝜖𝒁}, the hidden units parameters are calculated instead of being
randomly generated to converge faster.
Ying (2016) highlighted that the I-ELM merits are obvious but have four drawbacks which
need to be improved: 1) Generation of redundant units, 2) some hidden units are sometimes
47
larger than training examples, 3) the solution is not a least-squares type indicating that it is not
optimal, and 4) it is rarely used to solve multiclass classification problems. The proposed CI-
ELM and EI-ELM may learn faster and build a more compact architecture; however, the
drawbacks are not settled. Ying (2016) proposed Orthogonal I-ELM (OI-ELM) by
incorporating a Gram-Schmidt orthogonalization method in I-ELM to obtain the least-squares
solution. It randomly generates one hidden unit similar to I-ELM and calculates its output 𝐻𝑟.
The Gram-Schmidt orthogonalization method is applied to the hidden unit output to determine
the orthogonal vector 𝑉𝑟 and if its norm is greater than the predefined value, it is added, else
eliminated. For the 𝑤𝑟𝑜𝑐𝑤 calculation, the basic idea is similar to I-ELM with the replacement
of 𝑉𝑟 with the 𝐻𝑟 vector in Equation (2.31). Ying (2016) experimental work demonstrates that
OI-ELM achieved more a compact network and faster convergence compared to ELM, I-ELM,
CI-ELM, and EI-ELM. Inspired from the idea of (Ying, 2016), Zou et al. (2018) proposed a
new algorithm called OI-ELM based on the driving amount (DAOI-ELM) to obtain a better
generalization performance with more compact architecture. DAOI-ELM determines 𝑉𝑟 similar
to OI-ELM with modification in 𝑤𝑟𝑜𝑐𝑤. It adds 𝐸𝑟−1 to 𝑉𝑟 while calculating 𝑤𝑟
𝑜𝑐𝑤. The
comparison of DAOI-ELM with I-ELM, OI-ELM and B-ELM on several benchmarking and
real-world dataset demonstrated the effectiveness of DAOI-ELM.
Similarly, for ELM, Wang et al. (2016) explained that ELM is sensitive to the selection of an
optimal number of hidden units in the layer and improper hidden units can lead to suboptimal
accuracy. They proposed Self-adaptive ELM (SaELM) to find the best possible number of
hidden units for the network. SaELM initializes by defining the minimum and maximum
possible hidden units with its interval, width factor 𝑄 and scale factor 𝐿. Han et al. (2017) argue
that much effort has been dedicated to the convergence accuracy of I-ELM, whereas its
numerical stability (condition) is generally ignored. The numerical stability is directly related
to the input weight and hidden biases. The issue was addressed by combining particle swarm
48
optimization (PSO) and EM-ELM called IPSO-EM-ELM. The algorithm proposed to add one
by one hidden units to the existing network. PSO is recommended to optimize the input weight
and hidden bias in the new hidden unit. The optimal hidden unit is selected based on not only
the minimum error of training data but also considering the condition value of the hidden unit
output matrix. The output weight needs to be incrementally updated similar to EM-ELM.
Zong et al. (2013) highlighted that ELM provides better performance, however, none of the
work in ELM mentioned the problem of unbalanced data distribution. Typically, imbalance
class distributions are balanced by adopting either sampling techniques (oversampling or
undersampling) or algorithmic approaches. They proposed an algorithm named as Weighted
ELM (W-ELM) to handle both binary and multi-class imbalance data problems. Unlike, ELM
which considers all training examples as equal, W-ELM adds a penalty term to the errors
corresponding to different inputs. Similar to Equations (2.29) and (2.30), derived two versions
of 𝑤𝑜𝑐𝑤 were:
when ℎ < 𝑟:
𝑤𝑜𝑐𝑤 = 𝑈𝑇(1
𝜆+𝑊𝐻𝐻𝑇)−1𝑊𝑦ℎ (2.36)
when ℎ > 𝑟:
𝑤𝑜𝑐𝑤 = (1
𝜆+ 𝐻𝑇𝑊𝐻)−1𝐻𝑇𝑊𝑦ℎ (2.37)
where 𝑊 is a diagonal weight matrix defined for every training example. It determines what
degree of re-balance the user concerns and how much the boundary can be further pushed
towards the majority class. When the training example comes from a minority class, it is
assigned a relatively higher value of 𝑊 than the others. The experimental work demonstrates
that W-ELM not only obtains better generalization performance compared to ELM on the
49
imbalanced dataset by allocating importance to minority class compared to majority class but
also maintains good performance on the well-balanced dataset.
ELM and its variant are mainly focused on classification and regression problems and still
encounter difficulties in natural scenes (e.g., signals and visual) and practical applications
(voice recognition and image classification) due to its shallow architecture which is unable to
learn features even with a large number of hidden units. In many cases, a multilayer solution
is required for feature learning before classification is performed (Tang et al., 2016). Kasun et
al. (2013) proposed Multilayer ELM (ML-ELM) for classification based on the ELM
autoencoder (ELM-AE). ELM was modified to ELM-AE by keeping the output the same as
the input for autoencoder and estimating the weight for the hidden layer. The number of
successive hidden layers was calculated in the same manner as the ELM methodology to create
layer weights for ML-ELM. Finally, the output layer weight for ML-ELM is calculated using
regularized least squares. Tang et al. (2016) highlighted that the encoded output from ELM-
AE is directly fed into the last layer for decision making before applying the least-squares,
without random feature mapping which violates the ELM universal approximation-based
theories. Tang et al. (2016) proposed a new Hierarchical ELM (H-ELM) consisting of two
parts: unsupervised feature encoding based on the new 𝑙1 regularized ELM autoencoder to
extract multilayer sparse features of input data, and supervised feature classification based on
ELM is applied for decision making. H-ELM is based on the universal approximation
capability theories of ELM and the results demonstrate its superior performance over ELM and
other FNN autoencoders.
c) Semi Gradient and Iterative Algorithms
The No-propagation (No-Prop) simplifies the learning mechanism of multi-layer BPFNN by
randomly generating 𝑤𝑖𝑐𝑤 and hidden connection weights 𝑤ℎ𝑐𝑤 and only iteratively train 𝑤𝑜𝑐𝑤

50
by the BP learning algorithm (Widrow et al., 2013). The algorithm cannot be considered as
complete gradient-free learning because it uses gradient information in its last layer. However,
due to its random generation of 𝑤𝑖𝑐𝑤 and 𝑤ℎ𝑐𝑤, and only tuning the last layer 𝑤𝑜𝑐𝑤, it is named
as No-Prop. The No-Prop guarantee to minimize the loss function when the number of training
patterns is less than or equal to 𝑤𝑜𝑐𝑤 connecting the last hidden layer to the output units. This
criterion is referred to as the least mean square error capacity (LMS capacity). The No-Prop
algorithm explains that when the training pattern is under or at LMS capacity, the output unit
will deliver the desired output pattern perfectly and the generalization performance will be like
BP with much faster results. However, if the training pattern is overcapacity, BP works better
than No-Prop. In such a case, increasing the number of hidden units in the last layer will
increase the number of output weights and again the training pattern will become under or at
capacity, and the performance of No-Prop will increase.
Cao et al. (2016) argued that the random generation of hidden units’ parameters, and the
analytical calculation of output weights become infeasible and the generalization performance
drops when the dataset is extremely large. Iterative Feedforward Neural Networks with
Random Weights (IFNNRWs) was proposed to overcome the issues generated from random
generation. The iterative algorithm IFNNRWs is developed which iteratively tunes the output
connection weight based on 𝑙2 model. It randomly generates the input weight and hidden units
but iteratively calculates 𝑤𝑜𝑐𝑤 as expressed below:
𝑤𝑖+1𝑜𝑐𝑤 =
1
1 + 𝜆((𝐼 − 𝐻𝑇𝐻)𝑤𝑖
𝑜𝑐𝑤 + 𝐻𝑇𝐻) (2.38)
The advantages of this algorithm are that 𝑙2 regularization improves its generalization
performance. Unlike algorithms which are based on Moore-Penrose generalized Inverse of
51
hidden units, which consumes a lot of memory with the number of examples increasing,
IFNNRWs is more stable and unaffected by increasing the number of hidden units.
d) Application of Gradient free learning Algorithms
Various applications of gradient-free learning algorithms are explained and listed in Appendix
A.
2.2.4 Optimization techniques and applications
This section covers the remaining four categories (i.e., Optimization algorithms for learning
rate, Bias and Variance (Underfitting and Overfitting) minimization algorithms, Constructive
topology Neural Networks, Metaheuristic search algorithms) explaining mainly the
optimization techniques as summarized in Table 2.2. The optimization algorithms (techniques)
are explained along with their merits and technical limitations in order to understand the FNN
drawbacks and needed user expertise, so as to identify research gaps and future directions. The
list of applications mentioned in each category gives an indication of the successful
implementation of optimization techniques in various real-world management, engineering,
and health sciences problems. The sections below explain the algorithms categories and their
subcategories:
2.2.4.1 Optimization algorithms for learning rate
BP gradient learning algorithms are powerful and have been extensively studied to improve
the convergence. The important global hyperparameter that sets the position of new weight for
BP is the learning rate ∝. If ∝ is too large, the algorithms may diverge from a minimum loss
function and will oscillate around it, however, if ∝ is too small it will converge very slowly.
The suboptimal ∝ can cause FNN to trip into a local minimum or saddle point. A saddle point
52
can be defined as a point where the function has both minimum and maximum directions (Gori
and Tesi, 1992).
The algorithms in this category, that improve the convergence of BP by optimizing ∝, are based
on knowledge of exponential moving weighted average (EMA) statistical technique (Lucas and
Saccucci, 1990) and its bias correction (Kingma and Ba, 2014). EMA is best suitable when
the data is noisy, and it helps to make it denoise by taking a moving average of the previous
values to define the next sequence in the data. With an initial guess of ∆𝑤𝑜 = 0, the next
sequence can be computed from the expression:
∆𝑤𝑖 = 𝛽∆𝑤𝑖−1 + (1 − 𝛽)∇𝐸𝑖 (2.39)
where 𝛽 is a moving exponential hyperparameter with value [0,1]. Hyperparameter 𝛽 plays an
important role in EMA. Firstly, it approximates the moving average ∆𝑤𝑖 by 1/(1 − 𝛽) which
means higher the value of 𝛽, the more values will be averaged and the data trend will be less
noisy, whereas, a lower value of 𝛽 will average less values and the trend will fluctuate more.
Secondly, for a higher value of 𝛽, more importance will be given to the previous weights as
compared to the derivative values. Moreover, it is discovered that during the initial sequence,
the trend is biased and is further away from the original function due to the initial guess ∆𝑤𝑜 =
0. This results in much lower values which can be improved by computing the bias such that:
∆𝑤𝑖 =𝛽∆𝑤𝑖−1 + (1 − 𝛽)∇𝐸𝑖
1 − 𝛽𝑖 (2.40)
The effect of 1 − 𝛽𝑖 in the dominator decreases with increasing iteration 𝑖. Therefore, 1 − 𝛽𝑖
has more influence on the starting iteration and can generate a sequence with better results.
When the ∝ is small, the gradient slowly moves towards the minimum, whereas, a large ∝ will
oscillate the gradient along the long and short axis of the minimum error valley. This reduces

53
gradient movement towards the long axis which faces towards the minimum. The momentum
minimizes the short axis of oscillation while adding more contributions along the long axis
moves the gradient in larger steps towards the minimum with fewer iterations (Rumelhart et
al., 1986). Equation (2.39) can be modified for momentum:
∆𝑤𝑖𝑎 = 𝛽𝑎∆𝑤𝑖−1
𝑎 + (1 − 𝛽𝑎)∇𝐸𝑖 (2.41)
𝑤𝑖+1 = 𝑤𝑖−∝ ∆𝑤𝑖𝑎 (2.42)
where 𝛽𝑎 is the momentum hyperparameter controlling the exponential decay. The new weight
is a linear function of both the current gradient and weight change during the previous step
(Qian, 1999). Riedmiller and Braun (1993) argued that in practice, it is always not true that
momentum will make learning more stable. The momentum parameter 𝛽𝑎 is equally
problematic due to the learning parameter ∝ and no general improvement can be achieved.
Despite ∝, the second factor that effects the ∆𝑤𝑖 is the unforeseeable behaviour of the
derivative ∇𝐸𝑖 whose magnitude will be different for different weights. The Resilient
Propagation (RProp) algorithm was developed to avoid the problem of blurred adaptivity of
∇𝐸𝑖 and changes the size of ∆𝑤𝑖 directly without considering ∇𝐸𝑖. For each weight 𝑤𝑖+1, the
size of the update value ∆𝑖 is computed based on the local gradient information:
∆𝑖= {𝜂+ ∗ ∆𝑖−1 , 𝑖𝑓 ∇𝐸𝑖−1 ∗ ∇𝐸𝑖 > 0 𝜂− ∗ ∆𝑖−1 , 𝑖𝑓 ∇𝐸𝑖−1 ∗ ∇𝐸𝑖 < 0
∆𝑖−1 , 𝑒𝑙𝑠𝑒 (2.43)
where 𝜂+ and 𝜂− are increasing and decreasing hyperparameters. The basic intention is that
when the algorithm jumps over the minimum, ∆𝑖 is decreased by the 𝜂− factor and if it retains
the sign it is accelerated by the 𝜂+ increasing factor. The weight update ∆𝑤𝑖 is decreased if the
derivative is positive and increased if the derivative is negative such that:

54
∆𝑤𝑖 = {−∆𝑖 , 𝑖𝑓 ∇𝐸𝑖 > 0 +∆𝑖 , 𝑖𝑓 ∇𝐸𝑖 < 00 , 𝑒𝑙𝑠𝑒
(2.44)
𝑤𝑖+1 = 𝑤𝑖 + ∆𝑤𝑖 (2.45)
RProp has an advantage over BP in that it gives equal importance to all weights during learning.
In BP the size of derivative decreases for weights that are far from the output and they are less
modified compared to other weights, which make it slower. RProp is dependent on the sign
rather than derivative magnitude which gives equal importance to far away weights. Hinton et
al. (2012) addressed that RProp does not work with mini-batches because it treats all mini-
batches as equivalent. They proposed RMSProp by combining the robustness of RProp, the
efficiency of mini-batches, and gradient average over mini-batches. RMSprop is a minibatch
version of RProp by keeping a moving average of square gradient such that:
∆𝑤𝑖𝑏 = 𝛽𝑏∆𝑤𝑖−1
𝑏 + (1 − 𝛽𝑏)∇𝐸𝑖2 (2.46)
𝑤𝑖+1 = 𝑤𝑖 −
(
∝
√∆𝑤𝑖𝑏
)
∇𝐸𝑖
(2.47)
Like 𝛽𝑎, 𝛽𝑏 is a hyperparameter that controls the exponential decay. When the gradient is in
the short axis, the moving average will be large which will slow down the gradient, whereas,
in the long axis, the moving average will be small which will accelerate the gradient. For
optimal results, Hinton et al. (2012) recommended using 𝛽𝑏 = 0.9.
On the contrary, the Adaptive Gradient Algorithm (AdaGrad) performs informative gradient-
based learning by incorporating knowledge of the geometry of the data observed during each
iteration (Duchi et al., 2011). The features that occur infrequently are assigned a larger ∝

55
because they are more informative, while features that occur frequently are given a small ∝.
AdaGrad computes matrix 𝐺 as the 𝑙2 norm of all previous gradients:
∆𝑤𝑖 = (∝
√𝐺𝑖)∇𝐸𝑖 (2.48)
𝑤𝑖+1 = 𝑤𝑖 − ∆𝑤𝑖 (2.49)
This algorithm is more suitable for high spare dimensionality data. The above equations
increase the learning rate for more spare data and decrease the learning rate for low spare data.
The ∝ is scaled based on 𝐺 and ∇𝐸𝑖 to give a parameter specific learning rate. The main
drawback of AdaGrad is that it accumulates the squared gradient which grows after each
iteration. This shrinks the ∝ and it becomes infinitesimally small and limits the purpose of
gaining additional information (Zeiler, 2012). Therefore, AdaDelta was proposed based on the
idea extracted from AdaGrad to improve two main issues in learning: 1) shrinkage of ∝, and
2) manually selecting the ∝ (Zeiler, 2012). Accumulating the sum of the squared gradients
shrinks the ∝ in AdaGrad and this can be controlled by restricting the previous gradient to a
fixed size 𝑠. This restriction will not accumulate gradient to infinity and more importance will
go to the local gradient. The gradient can be restricted by accumulating an exponential decaying
average of the square gradient. Assume at 𝑖 the running average of the gradient is 𝐸[∇𝐸2]𝑖
then:
𝐸[∇𝐸2]𝑖 = 𝛽𝑐𝐸[∇𝐸2]𝑖−1 + (1 − 𝛽
𝑐)∇𝐸𝑖2 (2.50)
Like AdaGrad, taking the square root 𝑅𝑀𝑆 of the parameter 𝐸[∇𝐸2]𝑖:
𝑅𝑀𝑆𝑖 = √𝐸[∇𝐸2]𝑖 + 𝜖 (2.51)
56
where the constant 𝜖 is added to condition the denominator for approaching zero. The update
parameter ∆𝑤𝑖 can be expressed as:
∆𝑤𝑖 = (∝
𝑅𝑀𝑆𝑖) ∇𝐸𝑖 (2.52)
𝑤𝑖+1 = 𝑤𝑖 + ∆𝑤𝑖 (2.53)
The performance of this method on FNN is better with no manual setting of the ∝, insensitivity
to hyperparameters, and robust to large gradients and noise. However, it requires some extra
computation per iteration over GD and requires expertise in selecting the best hyperparameters.
Similarly, the concept of both first and second moments of gradients was incorporated in
Adaptive Moment Estimation (Adam). It requires first-order gradient information to compute
the individual ∝ for parameters from an exponential moving average of first and second
moments of gradients (Kingma and Ba, 2014). For parameter updating, it combines the idea of
both the exponential moving average of gradients like momentum and an exponential moving
average of square gradients like RMSProp and AdaGrad. The moving average of the gradient
is an estimate of the 1st moment (mean) and the square gradient is an estimate of the 2nd moment
(the uncentered variable) of the gradient. Like momentum and RMSProp, 1st-moment
estimation and 2nd-moment estimation can be expressed in Equations (2.41) and (2.46)
respectively. The above estimations are initialized with 0’s vectors which make it biased
towards zero during the initial iterations. This can be corrected by computing the bias
correction such as:
∆𝑤𝑖𝑎′ =
∆𝑤𝑖𝑎
1 − (𝛽𝑎)𝑖 (2.54)

57
∆𝑤𝑖
𝑏′ =∆𝑤𝑖
𝑏
1 − (𝛽𝑏)𝑖
(2.55)
The parameters are updated by:
∆𝑤𝑖 =
∝
√∆𝑤𝑖𝑏′ + 𝜖
∆𝑤𝑖𝑎′
(2.56)
𝑤𝑖+1 = 𝑤𝑖 − ∆𝑤𝑖 (2.57)
The parameter update rule in Adam is based on scaling their gradient to be inversely
proportional to the 𝑙2 norm of their individual present and past gradients. In AdaMax, the 𝑙2
norm based update rule is extended to the 𝑙𝑝 norm based update rule (Kingma and Ba, 2014).
For a more stable solution and avoiding the instability of large 𝑝, let 𝑝 → ∞ then:
∆𝑤𝑖𝑑 = max(𝛽𝑑∆𝑤𝑖−1
𝑑 , |∇𝐸𝑖|) (2.58)
where ∆𝑤𝑖𝑑 is exponentially weighted infinity norm. The updated parameter can be expressed
as:
∆𝑤𝑖 = (∝
1 − (𝛽𝑎)𝑖)∆𝑤𝑖
𝑎
∆𝑤𝑖𝑑 (2.59)
𝑤𝑖+1 = 𝑤𝑖 − ∆𝑤𝑖 (2.60)
The advantages of Adam and AdaMax are that it combines the characteristics of both AdaGrad
while dealing with sparse gradient and RMSProp in dealing with non-stationary objectives.
Adam and its extension AdaMax require less memory and are suitable for both convex and
non-convex optimization problems.
a) Application of optimization algorithms for learning rate
58
Various applications of optimization algorithms for learning rate are explained and listed in
Appendix A.
2.2.4.2 Bias and variance (underfitting and overfitting) minimization
algorithms
The best FNN should be able to truly approximate the training and testing data. Researchers
extensively studied FNN to avoid high bias and variance to improve convergence
approximations. The high bias is referred to a problem known as underfitting and high variance
is referred to as overfitting. Underfitting occurs when the network is not properly trained and
the patterns in the training data are not fully discovered. It occurs before the convergence point
and, in this case, the generalization performance (also known as test data performance) does
not deviate much from the training data performance. That is the reason that the underfitting
region has high bias and low variance. In contrast, overfitting occurs after the convergence
point when the network is overtrained. In this scenario, the training error is in a continuous
state of decreasing whereas the testing error starts increasing. The overfitting is known as
having the properties of low bias and high variance. The high variance in training and the
testing error occurs because the network trains the noise in the training data which might be
not part of the actual model data. The best choice is to choose a model that balances bias and
variance, which is known as bias and variance trade-off. Bias and variance trade-off allows
FNN to discover all patterns in the training data and simultaneously give better generalization
performance (Geman et al., 1992).
For simplicity, the bias-and-variance trade-off point is referred to as the convergence point.
The FNN should be stopped from further training when it approaches the convergence point to
balance bias (underfitting) and variance (overfitting). The most popular method to identify and
stop the FNN at the convergence point is to select suitable validation data. Validation datasets
59
and test datasets are used interchangeably and are unseen data held back from the training data
to check the network performance. The error estimate by the training data is not a useful
estimator and comparing its performance with the validation dataset generalization
performance can help to identify the convergence point (Zaghloul et al., 2009). One of the
drawbacks associated with the validation technique is that the dataset should be large enough
to split it (Reed, 1993). This makes it unsuitable for small datasets especially complicated data
with few instances and many variables. When sufficient data is not available, the n-fold cross-
validation technique can be considered as an alternative to the validation technique (Seni and
Elder, 2010). The n-fold cross-validation technique splits data randomly into n-equal sized data
subsamples. The FNN is repeated n times by allocating one subsample for testing and the
remaining n-1 for the training model. The n-subsample is allocated once for each testing.
Finally, the n-results are averaged to get a single accurate estimation. The suitable selection of
n-fold size is based on dataset complexity and network size which make this technique
challenging for complicated applications.
The underfitting problem is easily detectable and therefore the literature has focused on
proposing techniques for improving overfitting. A large size network has a greater possibility
to overfit as compared to a smaller size (Setiono and Hui, 1995). Similarly, overfitting chances
increase when the network degree of freedom (such as weights) increases significantly from
the training sample (Reed, 1993). These two problems have gained greater attention and led to
the development of the techniques, explained below, to avoid overfitting analytically rather
than trial and error approaches. The algorithms for this category are subcategorized into
regularization, pruning, and ensembles.
a) Regularization Algorithms
60
Overfitting occurs when the training examples information does not match with network
complexity. The network complexity depends upon the free parameters such as the number of
weights and added bias. Often it is desirable to lessen the network complexity by using less
weight to train networks. This can be done by limiting weight growth by techniques known as
weight decay (Krogh and Hertz, 1992). It penalizes the large weights in growing too large by
adding a penalize term in the loss function:
∑(𝑦ℎ − �̂�ℎ)2
𝑚
ℎ=1
+ 𝜆∑(𝑤𝑗)2
𝑝
𝑗=1
(2.61)
where ∑ (𝑦ℎ − �̂�ℎ)2𝑚
ℎ=1 is the error function and 𝑤𝑗 is the weight in position 𝑗 which is
penalized by parameter 𝜆. The selection of 𝜆 depends on the largeness of the penalty weight.
The above equation shows that if the training examples are more informative than the network
complexity, the regularization influence will be weak and vice versa. The above weight decay
method is also known as 𝑙2 regularization. Similarly, for 𝑙1 regularization:
∑(𝑦ℎ − �̂�ℎ)2
𝑚
ℎ=1
+ 𝜆∑|𝑤𝑗|
𝑝
𝑗=1
(2.62)
𝑙1 regularization adds absolute value, while 𝑙2 regularization adds the squared value of the
weight to the loss function. Krogh and Hertz (1992) experimental work demonstrated that FNN
with the weight decay technique can avoid overfitting and improve generalization performance.
The improvement mentioned in their paper was less significant. Several high-level techniques,
as discussed below, were proposed to achieve better results.
A renowned regularization technique Dropout was proposed for large fully connected networks
to overcome the issues of overfitting and the need for FNN ensembles (Srivastava et al., 2014).
With a limited dataset, the estimation of the training data with noise does not approximate the
61
testing data which leads to overfitting. Firstly, this happens because each parameter during the
gradient update influences the other parameters, which creates a complex coadaptation among
the hidden units. This coadaptation can be broken by removing some hidden units from the
network. Secondly, during FNN ensembles, combining the average of many outputs of a
separately trained FNN is an expensive task. Training many FNN requires many trial and error
approaches to find the best possible hyperparameters, which makes it a daunting task and needs
a lot of computation efforts. Dropout avoids overfitting by temporarily dropping the units
(hidden and visible) along with all connections with certain random probability during the
network forward steps. Training FNN with dropout means training 2n thinned networks where
n is a number of units in FNN. During testing time, it is not recommended to take an average
of the prediction from all thinned trained FNNs. It is best to use a single FNN during the testing
time without dropout. The weights of this single FNN provide a scaled down version of all the
trained weights. If the unit output is denoted by 𝑦𝑖′, input by 𝑥𝑖
′ with weight by 𝑤′, than the
dropout is expressed as:
𝑦𝑖′ = 𝑟 ∗ 𝑓(𝑤′𝑥𝑖
′) (2.63)
where 𝑟 is a vector of the independent Bernoulli random variable with * denoting an element
wise product. The downside of dropout is that its training time is 2-3 times longer than the
standard FNN for the same architecture. However, the experimental results achieved by
dropout compared to FNN are remarkable. DropConnect, a generalization of Dropout, is
another regularization technique for a large fully connected layer FNN to avoid overfitting
(Wan et al., 2013). The key difference between Dropout and DropConnect is in their dropping
mechanism. The Dropout temporarily drops the units along with their connection weights,
whereas, DropConnect randomly drops a subset of weight connections with a random
probability. The technique is like Dropout and the key difference is that DropConnect drops
62
connection weights during forward propagation of the network. The output 𝑦𝑖′ in Dropconnect
can be expressed as:
𝑦𝑖′ = 𝑓((𝑟 ∗ 𝑤′)𝑥𝑖
′) (2.64)
The training time of DropConnect is slightly higher than No-Drop and Dropout due to the
feature extractor bottleneck in large models. The advantage of DropConnect is that it allows
training a large network without overfitting with better generalization performance. The
limitation of both Dropout and DropConnect are that they are suitable only for fully connected
layer FNN. Other regularization techniques include Shakeout that was proposed to remove
unimportant weights to enhance FNN prediction performance (Kang et al., 2017). The
performance of FNN may not be severely affected if most of the unimportant connection
weights are removed. One technique is to train a network, prune the connections and finetune
the weights. However, this technique can be simplified by imposing sparsity-inducing penalties
during the training process. During implementation, Shakeout randomly chooses to reverse or
enhance the unit contribution to the next layer in the training forward stage to avoid overfitting.
Dropout can be considered a special case of shakeout by keeping the enhancement factor to
one and the reverse factor to zero value. Shakeout induces 𝑙0 and 𝑙1 regularization which
penalizes the magnitude of the weight and leads to a sparse weight that truly represents a
connection among units. This sparsity induced penalty (𝑙0 and 𝑙1 regularization) is combined
with 𝑙2 regularization to get a more effective prediction. It randomly modifies the weight based
on 𝑟 and can be expressed as:
{
𝑤𝑖+1′ = −𝑐𝑠 𝑖𝑓 𝑟 = 0
𝑤𝑖+1′ =
𝑤𝑖′ + 𝑐𝜏𝑠
1 − 𝜏 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
(2.65)
63
where 𝑠 = sgn(𝑤𝑖′) with ±1 or 0 if 𝑤𝑖
′=0, constant 𝑐 > 1 and 𝜏 ∈ [0,1]. When hyperparameter
𝑐 is set to zero, shakeout can be considered a special case of Dropout.
Beside dropping hidden units or weights, the batch normalization method avoids overfitting
and improves the learning speed by preventing the formulation of the internal covariant shift
problem, which occurs due to changes in the parameters during the training process of FNN
(Ioffe and Szegedy, 2015). Updating the parameters during training affects the layers of the
input distribution in that it makes it deeper and slower with a requirement for more careful
hyperparameters initialization. The batch normalization technique eliminates the internal
covariant shift and accelerates network training. This simple technique improves the layers
distribution by normalizing activation of each layer with the mean zero and unit variance.
Unlike BP with a higher learning rate which results in gradient overshoot or diverges and gets
stuck in local minima, the stable distribution of the activation values by batch normalization
during training can tolerate larger learning rates.
Similarly, besides using the validation and its variant techniques that may not capture
overfitting, it might go undetected, which costs more. The Optimized approximation algorithm
(OAA) avoids overfitting without any need for a separate validation set (Liu et al., 2008). It
uses stopping criteria formulated in their original paper known as Signal to Noise Ratio Figure
(SNRF) to detect overfitting during the training error measurement. It calculates SNRF during
each iteration and if it is less than the defined threshold value, the algorithm is stopped.
b) Pruning FNN
Training a network with larger size requires more time because of many hyperparameters
adjustments which can lead to overfitting if not initialized and controlled properly, whereas,
the smaller network will learn faster but may converge to poor local minima or be unable to
learn data. Therefore, it is often desirable to get an optimal network size with no overfitting,
64
better generalization performance, fewer hyperparameters, and fast convergence. An effective
way is to train a network with a large possible architecture and remove the parts that are
insensitive to performance. This approach is known as pruning because it prunes unnecessary
units from the large network and reduces its depth to the most optimal possible small network
with few parameters. This technique is considered effective in eliminating the overfitting
problem and in improving generalization performance, but at the same time, it requires a lot of
effort and training time to construct a large network and then to reduce it. The simplest
technique of pruning involves training a network, pruning the unnecessary parts and retraining.
The training and retraining of weights in pruning will sustainably increase the FNN training
time. The training time can be reduced to some extent by calculating the sensitivity of each
weight with respect to the global loss function (Karnin, 1990). The weight sensitivity 𝑆 can be
calculated from the expression:
𝑆𝑖 = ∑[∆𝑤𝑖]2
𝑛−1
𝑖=0
𝑤𝑖+1∝ (𝑤𝑖+1 − 𝑤𝑖)
(2.66)
The idea is to calculate sensitivity concurrently during the training process without interfering
with the learning process. Reed (1993) explained that besides sensitivity methods, penalty
methods (weight decay or regularization) are also other types of pruning. In sensitivity
methods, weight or units are removed, whereas, in the penalty method, weights or units are set
to zero which is like removing them from the FNN. Kovalishyn et al. (1998) applied the pruning
technique to the constructive FNN algorithm and demonstrate that constructive algorithms
(also known as cascade algorithms) generalization performance improves significantly
compared to fixed topology FNNs. Han et al. (2015) demonstrated the effectiveness of the
pruning method by performing experimental work on AlexNet and VGG-16. Pruning method
65
reduced the parameters from 61 million to 6.37 million and 138 million to 10.3 million for
AlexNet and VGG-16 respectively without losing accuracy.
c) Ensembles of FNNs
Another effective method of avoiding overfitting is the ensembles of FNNs, which means
training multiple networks and combining their prediction as opposed to single FNNs. The
combination is done through averaging in regression and majority in classification or weighted
combination of FNNs. The more advanced techniques include stacking, boosting and bagging,
and many others. The error and variance obtained by the collective decision of ensembles are
considered to be less as compared to individual networks (Hansen and Salamon, 1990). Many
ensembles combine three stages: defining the structure of FNN in ensembles, training each
FNN, and combining the results. Krogh et al. (1995) explained that the generalization error of
ensembles is less than network individual errors for uniform weights. Islam et al. (2003)
explained that the drawback with existing ensembles is that the number of FNNs in the
ensemble and the number of hidden units in individual FNN need to be predefined for FNN
ensemble training. This makes it suitable for applications where prior rich knowledge and FNN
experts are available. The above-mentioned drawbacks can be overcome by the constructive
NN ensemble (CNNE) by determining both the number of FNNs in the ensemble and their
hidden units in individual FNNs based on negative correlation learning. FNN ensembles are
still being used in many applications, with different strategies, by researchers. The above
discussion covers some of the techniques for effective ensembles and others can be more found
in the literature.
d) Applications of bias and variance minimization algorithms
Various applications of bias and variance minimization algorithms are explained and listed in
Appendix A.
66
2.2.4.3 Constructive topology FNN
FNN with a fixed number of hidden layers and units are known as fixed-topology networks
which can be either shallow (single) or deep (more than one) depending on the application task.
Whereas, the FNN that starts with the simplest network and then adds hidden units until the
error convergence is known as a constructive (or cascade) topology network. The drawbacks
associated with fixed typology FNNs are that the hidden layers and units need to be predefined
before training initialization. This needs a lot of trial and error to find the optimal hidden units
in the layers. If too many hidden layers and units are selected, the training time will increase,
whereas, if fewer layers and hidden units are selected, it might result in poor convergence.
Constructive topology networks have advantages over fixed topologies that in it start with a
minimal simple network and then adds hidden layers with some predefined hidden units until
error convergence occurs. This eliminates the need for trial and error approaches and
automatically constructs the network. Recent studies have shown that constructive algorithms
are more powerful than fixed algorithms. Hunter et al. (2012) in their FNNs comparative study
explained that a constructive network can solve the Parity-63 problem with only 6 hidden units
compared to a fixed network that required 64 hidden units. The training time is proportional to
the hidden unit’s quantity. Adding more hidden units will cause the network to be slow because
of more computational work. The computational training time of constructive algorithms is
much better than in a fixed topology. However, it does not mean that the generalization
performance of constructive networks will be always superior to a fixed network. A more
careful approach is needed to handle hidden units with a lot of connections and parameters to
stop the addition of further hidden units to avoid decreasing generalization performance (Kwok
and Yeung, 1997).
67
The most popular algorithm for constructive topology networks in the literature is the Cascade-
Correlation neural network (CasCor) (Fahlman and Lebiere, 1990). CasCor was developed to
address the slowness of BPNN. The factor that contributes to the slowness of BPNN is that
each hidden unit faces a constantly changing environment when all weights in the network are
changed collectively. CasCor is initialized with a simple network by linearly connecting the
input 𝑥 to the output �̂� by the output connection weight 𝑤𝑜𝑐𝑤. Most often, the QP learning
algorithm is applied for repetitively tuning of 𝑤𝑜𝑐𝑤. When training converges, and the 𝐸 is
more than ε, then a new hidden unit ℎ is added receiving all input connections 𝑤𝑖𝑐𝑤 from the
𝑥 and any pre-existing hidden units. The ℎ is trained to maximize its covariance 𝑆𝑐𝑜𝑣 magnitude
with 𝐸, as expressed below:
𝑆𝑟𝑐𝑜𝑣 = ∑|∑(ℎ𝑟 − ℎ̅)(𝐸𝑟,𝑜 − 𝐸𝑜̅̅ ̅)
𝑟
|
𝑜
(2.67)
where ℎ̅ and 𝐸𝑜̅̅ ̅ are mean values of hidden unit ℎ𝑟 and output error 𝐸𝑝,𝑜, 𝑜 and 𝑟 are the network
output and the hidden unit respectively. The magnitude is maximized by computing the
derivative of 𝑆𝑐𝑜𝑣 with respect to 𝑤𝑖𝑐𝑤 and performing gradient ascent. When there is no
further increase in 𝑆𝑐𝑜𝑣, the 𝑤𝑖𝑐𝑤is kept frozen and ℎ is connected to �̂� through the 𝑤𝑜𝑐𝑤.
Again, the 𝑤𝑜𝑐𝑤 is retrained, and 𝐸 is calculated. If 𝐸 is less than ε, the algorithm is stopped,
otherwise, 𝑢 is added one by one till the error is acceptable. CNN suggests using QP learning
algorithm for training because of its characteristics to take larger steps toward the minimum
rather than GD infinitesimal small steps. Experimental work on nonlinear classification
benchmarking of two spiral problems (Lang, 1989) demonstrated the training speed
effectiveness of CNN over BPFNN. The major advantage of CNN is that it learns quickly and
determine its own network size. However, studies show that CNN is more suitable for
classification tasks (Hwang et al., 1996). This narrows the scope of CNN in other application
68
areas. Some studies have shown that the generalization performance of CNN may not be
optimal and even larger networks may be required (Lehtokangas, 2000). Kovalishyn et al.
(1998) experimental work on quantitative structure activity relationship (QSAR) data did not
find any model where the performance of CNN was significantly better than BPFNN. They
optimized the performance of CNN by introducing a pruning algorithm.
The Evolving cascade Neural Network (ECNN) was proposed to select the most informative
features from the data to resolve the issue of overfitting in CCN (Schetinin, 2003). Overfitting
in CNN results from the noise and redundant features in the training data which affects its
performance. ECNN selects the most informative features by adding initially one input unit
and the network is evolved by adding a new input unit as well as a hidden unit. The final ECNN
has a minimal number of hidden units and the most informative input features in the network.
The selection criteria for a neuron is based on the regularity criterion 𝐶 extracted from the
Group Method of Data Handling (GMDH) algorithm (Farlow, 1981). The higher the value of
𝐶, the less informative the hidden unit will be. The selection criteria for hidden units can be
expressed as:
𝑖𝑓 𝐶𝑟 < 𝐶𝑟−1, 𝑎𝑐𝑐𝑒𝑝𝑡 𝑟𝑡ℎ ℎ𝑖𝑑𝑑𝑒𝑛 𝑢𝑛𝑖𝑡 (2.68)
The selection criteria illustrate that if 𝐶𝑟 calculated for the current hidden unit is less than the
previous hidden unit 𝐶𝑟−1, it means that the current hidden unit is more informative and
relevant than the previous unit and will be then added in the network.
Huang, Song, et al. (2012) explained that the CNN covariance objective function is maximized
by training 𝑤𝑖𝑐𝑤 which cannot guarantee a maximum error reduction when a new hidden unit
is added. This will slow down the convergence and more hidden units will be needed which
will reduce the generalization performance. In addition to this, the repetitive tuning of
69
𝑤𝑜𝑐𝑤after each hidden unit addition is more time consuming. They proposed an algorithm
named as Orthogonal Least Squares-based Cascade Network (OLSCN), which used an
orthogonal least squares technique and derived a new objective function 𝑆𝑜𝑙𝑠 for input training,
expressed as below:
𝑆𝑟𝑜𝑙𝑠 = 𝐸𝑟−1 − 𝐸𝑟 = (𝛾𝑟
𝑇𝑦)2/(𝛾𝑟𝑇𝛾𝑟) (2.69)
where 𝛾 are the elements of the orthogonal matrix obtained by performing QR factorization of
the output of the 𝑟 hidden unit. This objective function is optimized iteratively by using the
second-order algorithm as expressed below:
𝑤𝑖+1 (𝑟)𝑖𝑐𝑤 = 𝑤𝑖 (𝑟)
𝑖𝑐𝑤 − [𝐇𝐧𝑟 − 𝜇𝐼𝑟]−1𝑔𝑟 (2.70)
where 𝐼 is an identity matrix and 𝜇 is damping hyperparameter factor, 𝑔𝑟 is the gradient of the
new objective function 𝑆𝑜𝑙𝑠 with respect to 𝑤𝑖𝑐𝑤 for hidden unit 𝑟. The information generated
from input training is further continued to calculate 𝑤𝑜𝑐𝑤 using the back substitution method
for linear equations. The 𝑤𝑖𝑐𝑤 values, after randomly initializing, are trained based on the
above objective function, however, 𝑤𝑜𝑐𝑤 values are calculated after all 𝑢 are added and thus
there is no need for any repeatedly training. The benefit of OLSCN is that it needs less hidden
units as compared to original CCN for the same training example, with some improvement in
generalization performance.
In addition, the Faster Cascade Neural Network (FCNN) was proposed to improve the
generalization performance of CCN and improve the existing OLSCN drawbacks: Firstly, the
linear dependence of candidate units with the existing ℎ can cause mistake in the new objective
function in OLSCN. Secondly, the 𝑤𝑖𝑐𝑤 modification by the modified Newton Method is based
on a second-order 𝐇𝐧 which may result in a local minimum and slow convergence due to heavy
computation (Qiao et al., 2016). In FCNN, hidden nodes are generated randomly and remain
70
unchanged as inspired by randomly mapping algorithms. The 𝑤𝑜𝑐𝑤 connecting both input and
hidden units to output units are calculated after the addition of all the necessary input and
hidden units. The FCNN initializes, with no input and hidden units in the network. The bias
unit is added to the network and input units are added one by one with error calculation for
each input unit. When there are no input units to be added, a pool of candidate units is randomly
generated. The candidate unit with the maximum capability to error reduction computed from
the reformulated modified index is added as a hidden unit to the network. When a maximum
number of hidden units or defined thresholds are achieved, the addition of hidden units is
stopped. Finally, the output units are calculated by back substitution computing like OLSCN.
The experimental comparison among FCNN, OLSCN, and CNN demonstrated that FCNN
achieved better generalization performance and fast learning, however, the network
architecture size increases many times.
Nayyeri et al. (2018) proposed to use a correntropy based objective function with a sigmoid
kernel to adjust the 𝑤𝑖𝑐𝑤 of the newly added hidden unit rather than a covariance (correlation)
objective function. The success of correlation heavily relies on the Gaussian and linearity
assumptions, whereas, the properties of correntropy are to make the network more optimal in
nonlinear and non-Gaussian terms. The new algorithm with a correntropy objective function
based on a sigmoid kernel is named as Cascade Correntropy Network (CCOEN). Similar to
other cascade algorithms described above, 𝑤𝑖𝑐𝑤 is optimized by using correntropy objective
function 𝑆𝑐𝑡 with sigmoid:
𝑆𝑟𝑐𝑡 = max
𝑈𝑟(∑(tanh(а𝑟⟨𝐸𝑟−1, 𝐻𝑟⟩ + 𝑐)) − 𝐶‖𝑤𝑟
𝑖𝑐𝑤‖2
𝑟
𝑖=1
) (2.71)
71
where tanh(а𝑟⟨. , . ⟩ + 𝑐) is defined as a sigmoid kernel with hyperparameters а and 𝑐. 𝐶 ∈
{0,1} is a constant. If the new hidden unit and residual error are orthogonal then 𝐶 = 0 ensures
algorithm convergence, otherwise 𝐶 = 1. The 𝑤𝑜𝑐𝑤 is adjusted as:
𝑤𝑟𝑜𝑐𝑤 =
𝐸𝑟−1𝐻𝑟𝑇
𝐻𝑟𝐻𝑟𝑇 (2.72)
An experimental study was performed on regression problems, with and without noise and
outliers, by comparing CCOEN with six other objective functions as defined in (Kwok and
Yeung, 1997), the CasCor covariance objective function as shown in Equation (2.67), and one
hidden layer FNN. The study demonstrates that the CCOEN correntropy objective function, in
most cases, achieved better generalization performance and increase the robustness to noise
and outliers compared to other objective functions. The network size of CCOEN showed
slightly less compactness compared to other objective functions, however, no specific objective
function was found to have better compact size, in general.
a) Application of Constructive FNN
Various applications of constructive FNN are explained and listed in Appendix A.
2.2.4.4 Metaheuristic search algorithms
The major drawback of FNN is that it stuck at a local minimum with a poor convergence rate
and it becomes worse at the plateau surface where the rate of change in error is very slow at
each iteration. This increases the learning time and coadaptation among the hyperparameters.
Therefore, trial and error approaches are applied to find optimal hyperparameters, and this
makes gradient learning algorithms even more complex and it becomes difficult to select the
best FNN. Moreover, the unavailability of gradient information in some applications makes
FNN ineffective. To solve the two main issues of FNN that need to find the best optimal
72
hyperparameters and to make it useable with no gradient information, the application of
metaheuristic algorithms such as genetic algorithm, particle swarm optimization, and whale
optimization algorithm is implemented in combination with FNN. The major contribution of
the applications of a metaheuristic algorithm is that it may converge at a global minimum rather
than the local minimum by moving from a local search to a global search. Therefore, these are
more suitable for global optimization problems. The metaheuristic algorithms are good for
identifying the best hyperparameters and convergence at a global minimum, but they have
drawbacks in the high memory requirements and processing time.
a) Genetic Algorithm
Genetic Algorithm (GA) is a metaheuristic technique belonging to the class of evolutionary
algorithms (EA) inspired by Darwinian theory about evolution and natural selection and was
invented by John Holland in the 1960s (Mitchell, 1998). It is used to find a solution for
optimization problems by performing chromosome encoding, fitness selection, crossover, and
mutation. Like BP, it is used to train FNNs to find the best possible hyperparameters.
Researchers demonstrated that the generalization performance of GA is better than BP
(Mohamad et al., 2017) with the additional need for training time. Liang and Dai (1998)
highlighted the same issue by applying GA to FNN. They demonstrated that the performance
of GA is better than BP, but the training time increased. Ding et al. (2011) proposed that GA
performance can be improved by integrating the concept of both BP gradient information and
GA genetic information to train an FNN for superior generalization performance. GA is good
for global searching, whereas, BP is appropriate for local searching. The algorithm first uses
GA to optimize the initial weights by searching for better search space and then uses BP to fine
tune and search for an optimal solution. Experimental results demonstrated that FNN trained
on the hybrid approach of GA and BP achieved better generalization performance than
73
individual BPNN and GANN. Moreover, in terms of learning speed, a hybrid approach is better
than GANN compared to BPNN.
b) Particle Swarm Optimization
Eberhart and Kennedy (1995) argued that a GA used to find hyperparameters may not be
suitable for the crossover operator. The two chromosomes selected with high fitness values
might be very different from one another and reproduction will be not effective. The Particle
Swarm Optimization (PSO) based FNNs (PSONN) can overcome this issue in GA by searching
for the best optimal solution through the movement of particles in space. PSO is an iterative
algorithm in which a particle 𝑤 adjusts its velocity 𝑣 during each iteration based on momentum,
its best possible position achieved 𝑝𝑝𝑏𝑒𝑠𝑡 so far and the best possible position achieved by
global search 𝑝𝑔𝑏𝑒𝑠𝑡. This can be expressed in mathematically as:
𝑣𝑖+1 = 𝑣𝑖 + 𝑐1 ∗ 𝑟 ∗ (𝑝𝑖𝑝𝑏𝑒𝑠𝑡 − 𝑤𝑖) + 𝑐2 ∗ 𝑟 ∗ (𝑝𝑖
𝑔𝑏𝑒𝑠𝑡− 𝑤𝑖) (2.73)
𝑤𝑖+1 = 𝑤𝑖 + 𝑣𝑖+1 (2.74)
where 𝑟 is a random number with value [0,1] and 𝑐 is an acceleration constant. A more robust
generalization may be achieved by balancing the global search and local search, and PSO being
modified to Adaptive PSO (APSO) by multiplying the current velocity with the inertia weight
𝑤𝑖𝑛𝑡𝑒𝑟𝑖𝑎 such that (Shi and Eberhart, 1998):
𝑣𝑖+1 = 𝑤𝑖𝑛𝑡𝑒𝑟𝑖𝑎 ∗ 𝑣𝑖 + 𝑐1 ∗ 𝑟 ∗ (𝑝𝑖
𝑝𝑏𝑒𝑠𝑡 − 𝑤𝑖) + 𝑐2 ∗ 𝑟 ∗ (𝑝𝑖𝑔𝑏𝑒𝑠𝑡
− 𝑤𝑖) (2.75)
Zhang et al. (2007) argued that PSO converges faster in a global search but around the global
optimum, it becomes slow, whereas, BP converges faster at a global optimum due to efficient
local search. The faster property of APSO in a global search at the initial stages of learning and
the BP of local search motivates the use of a hybrid approach known as particle swarm
74
optimization backpropagation (PSO-BP) to train the FNN hyperparameters. Experimental
results indicate that PSO-BP generalization performance and learning speed are better than
both PSONN and BPNN. The critical point in PSO-BP is to decide when to shift learning from
PSO to BP during learning. This can be done by a heuristic approach, and if the particle has
not changed from in iterations then the learning should be shifted to gradient BP. One of the
difficulties associated with PSO algorithms is the selection of optimal hyperparameters such
as 𝑟, 𝑐 and 𝑤𝑖𝑛𝑡𝑒𝑟𝑖𝑎. The performance of the PSO algorithm is highly influenced on
hyperparameter adjustment and is currently being investigating by many researchers.
Shaghaghi et al. (2017) detailed a comparative analysis of a GMBH neural network optimized
by GA and PSO, and concluded that GA is more efficient than PSO. However, in the literature,
the performance advantage of GANN over PSONN and vice versa is still unclear.
c) Whale Optimization Algorithm
The application of GAs and APSO have been investigated widely in the literature, however,
according to the no free lunch (NFL) theorem, there is no algorithm that is superior for all
optimization problems. The NFL theorem is the motivation for proposing the whale
optimization algorithm (WOA) to solve the problem of local minima, slow convergence, and
dependency on hyperparameters. The WOA is inspired by the bubble net hunting strategy of
humpback whales (Mirjalili and Lewis, 2016). The idea of humpback whale hunting is
incorporated in WOA, which creates a trap using bubbles, moving in a spiral path around the
prey. It can be expressed mathematically as:
𝑤𝑖+1 = {𝑤𝑖∗ − 𝐴𝐷 𝑝 < 0.5
𝐷′𝑒𝑏𝑙cos(2𝜋𝑖) + 𝑤𝑖
∗ 𝑝 ≥ 0.5 (2.76)
where 𝐴 = 2𝑎𝑟 − 𝑎, 𝐶 = 2𝑟 such that 𝑎 is linearly decreased from 2 to 0 and 𝑟 is a random
number in [0,1], 𝑏 is constant and represent the shape of the spiral, 𝑙 is a random number in [-
75
1,1], and 𝑝 is a random number in [0,1]. 𝐷′ = |𝑤𝑖∗ − 𝑤𝑖| is the distance between the best
solution obtained so far and current position and 𝐷 = |𝐶𝑤𝑖∗ − 𝑤𝑖|. The first part of the above
equation represents the encircling mechanism and the second part represents the bubble net
technique. Like GAs and APSO, the search process starts with candidate solutions and then
improves it until defined criteria are achieved. In WOA, search agents are assigned and their
fitness functions are calculated. The position of the search agent is updated by computing
Equation (2.76). The process is repeated until the maximum number of iterations is achieved.
Ling et al. (2017) mentioned that WOA disadvantageous of slow convergence, low precision,
and being trapped in a local minimum because of lack of population diversity. They argued
that WOA is more useful for solving low dimensional problems, however, when dealing with
high dimensional and multi-model problems, its solution is not quite optimal. To overcome the
WOA drawbacks, an extension known as the Lévy flight WOA was proposed to enhance the
convergence by avoiding the local minimum.
d) Application of metaheuristic search algorithms
Various applications of metaheuristic search algorithms are explained and listed in Appendix
A.
2.3 Discussion
The application of NNs is gaining much popularity in the airline sector to improve its various
operations and enhance services. For instance, Lin and Vlachos (2018) proposed an analytical
framework, known as “Importance-Performance-Impact-Analysis”, to improve customer
satisfaction from airlines by incorporating techniques such as BPNNs, decision-making trail,
and evaluation laboratory. Cui and Li (2017) studied airline efficiency measures under “Carbon
Neutral Growth from 2020” and used a BPNN to predict the CO2 emission volume for an
76
individual airline. Khanmohammadi et al. (2016) studied the issue of nominal variables in data
and proposed to use a multilevel input layer BPNN to predict incoming flight delays for the
John F. Kennedy (JFK) International Airport in New York. The list of applications of neural
networks in the airline domain is long, thereby motivating to apply NN-based machine learning
methods to study fuel estimation for flight trips.
We limit the scope of our study to EAs and BPNNs. EAs are disadvantageous in that they
require a lot of effort to perform flight testing, and they involve expertise for complex
mathematical formulation as well as cost to determine coefficients. All these aspects make EAs
difficult to implement (Pagoni and Psaraki-Kalouptsidi, 2017; Senzig et al., 2009; Yanto and
Liem, 2018). The efforts based on BPNNs to provide an alternative for EAs can be considered
as an improvement; however, existing research works are restricted to trial-and-error
approaches to determine the optimal hyperparameters, the number of hidden units and layers,
and the activation functions. The major drawbacks of the fixed topology of BPNNs are that it
involves iterative tuning of connection weights. This tuning may converge at local minima
when global minima are far away. As a result, learning becomes slow when the learning rate
is low and unstable when the learning rate is high (Huang, Zhu, et al., 2006). Other issues
include local and global hyperparameter adjustment and decision, for instance, setting the
learning rate, connection weights, hidden units, hidden layer, and gradient learning algorithm.
Too many hyperparameters and their adjustment with iterative tuning influence between each
other make the network complex, which leads to the problem known as weak generalization
performance and slow convergence (Huang, Chen, et al., 2006; Kapanova et al., 2018; Krogh
and Hertz, 1992; Liew et al., 2016; Srivastava et al., 2014). The aforementioned drawbacks
need to be resolved in a more innovative way to get an accurate trip fuel estimation for each
flight with less expertise requirement and faster learning speed. In-depth literature review
results in below research gaps:
77
1 EAs are based on complex energy balance mathematical formulation which needs a lot
of expertise and cost to determine many coefficients making it difficult to implement.
A lot of flight testing is needed to generate information about parameters and to
determine coefficients. The EAs needed some of the information about aircrafts types
and engines to determine the amount of fuel needed for a journey. The unavailability
of such information and usage of an outdated existing database having global
parameters with default values rather than local parameters may result in inaccurate
estimation of fuel by EAs. In the literature, an insufficient attempt has been made to
study the effect of using global parameters on the deviation of fuel from estimation
using a practical example.
2 The popularity of machine learning BPNN in the aviation sector and particularly in
estimating fuel consumption has gained much popularity to provide as an alternative to
EAs. Regarding methodology, in exiting studies, the pitfall is that no clear direction
exists that has explained the reason for recommended fixed topology architecture for
estimating fuel. The selection of hidden units, hidden layers, connection weight, and
learning rate requires much human intervention and inappropriate hyperparameter
selection may cause the algorithm to converge at suboptimal solution leading to higher
fuel deviation. A lot of trial and error experimental need to be performed to find the
best hyperparameters and which even become more difficult when dealing with high
dimensional real data. Another technical drawback of BPNN is that it converges at local
minima when global minima are far away, and computational time is highly dependent
on gradient derivation and learning speed.
3 It is observed that the selection of operational parameters was considered based on prior
experience and knowledge, whereas, their relationship to fuel consumption was
unnoticed. Moreover, existing BPNN based estimation models are trained by
78
considering low-level operational parameters. For instance, Schilling (1997) model was
based on a low-level operational parameter such as altitude and velocity with the future
recommendation of incorporating more parameters. However, Trani et al. (2004) also
used low-level operational parameters such as Mach number, weight, temperature, and
altitude, and according to a recent study, Baklacioglu (2016) also used low-level
operational parameters such as altitude and velocity for estimating fuel consumption.
In the literature, a gap still exists to add high-level operational parameters that can
contribute to minimizing fuel deviation which was ignored previously.
4 Most studies formulated to overcome fuel estimation limitations are proposed taking
into consideration either take-off, cruise or descent phase. The suggested models may
fail to work on all phases efficiently. For instance, the model proposed for take-off may
not perform accurately for decent because of a change in operational parameters. Some
models proposed to estimate fuel for phases separately and accumulate them to know
the final fuel needed for the journey. This approach can even result in higher deviation
because the amount of overestimation or underestimation in each phase may
cumulatively lead to higher fuel deviation. Therefore, it is important to have a model
that can efficiently estimate fuel for all phases collectively to ensure profitability and
safety.
5 Once developed, the performance of the same architecture machine learning NN may
no longer be suitable for learning the same application if data structure and size
changes. How to improve existing machine learning algorithms that may give the same
and accurate result regardless of a change in data structure and size is gaining attraction.
In the literature, fuel is estimated based on available small dimensional data and no
effort has been made to check the performance of an algorithm on varying nature of
data. The comparison of the difference in fuel deviation by considering all sectors high
79
dimensional data and reducing the dataset into small chunks (portions) need
considerable attention. The algorithm having a minimal difference in performance
regardless of a change in data structure and size means that algorithm estimation
accuracy does not decrease with the change in data dimensional.
An important question arises: Which machine learning NN algorithm will be more suitable to
address the above-mentioned research gaps? A comprehensive review of FNNs in Section 2.2
gives insight that existing improvement is not straightforward, and researchers are making
continuous efforts to propose algorithms that are computationally efficient and have better
generalization performance. By analyzing the existing research, we consider that following
seven research gaps that need considerable attention in order to improve existing FNNs:
1 Activation function: The importance of using nonlinear activation function in hidden
layers of FNNs is clear, however, it is still unclear in the literature which activation
function is more suitable for a particular application and data structure.
2 Efficient and compact Algorithm with fewer hyperparameters: Gradient free learning
algorithms are simple to apply because of no backpropagation, whereas, gradient
learning algorithms have compact architecture. Efforts are needed to design algorithm
has both characteristics of gradient-free learning and compact architecture.
3 Connection weight initialization: The purpose of FNN is to find the best optimal
connection weights that can generate optimal results. The question arises: What should
be the best possible initial weights for the network? Traditional FNN is dependent on
the initial weight value because it calculates the derivative of the total error with respect
to weight to get a minimum of the objective function. Assigning suboptimal weights
will cause the network to have more iterations and subsequently decreases its
performance. The issue is resolved to some extent by a new approach that analytically
80
calculates the connection weights on the output side by randomly generating hidden
units. However, existing neural networks can be further strengthened by calculating all
connection weights (including input connection and output connection) analytically to
generate hidden units, explaining maximum variance in the dataset. This may also help
to further improve the generalization and learning speed by compacting the size of the
network.
4 Data structure: Future research may include designing FNN architecture with less
complexity with the characteristics of learning noisy data without overfitting. Few
attempts have been made to study the effect of data size and structure on FNN
algorithms. The availability of training data in many applications (for instance, medical
science and so on) is limited (small data rather than big data) and costly (Choi et al.,
2018; Shen, Choi and Minner, 2019). Once trained, the same model may become
unstable for less or more data within the same application and may result in a loss of
generalization ability. Each time, for the same application area and algorithm, a new
model is needed to be trained with a different set of parameters. Future research on
designing an algorithm that can approximate the problem task equally, regardless of
data size (instance) and shape (features), will be a breakthrough achievement.
5 Eliminating the need for data pre-processing and transformation: Wrong application
of pre-processing and transformation techniques may result in suboptimal results.
Future algorithms are needed that may be less sensitive to outliers and noisy data and
do not need to reduce the magnitude of data.
6 A hybrid approach for real-world applications: Researchers most often use publicly
available real-world data to compare their results with other popular algorithms.
Frequently using the same real-world applications data may cause specific data to
become a benchmark. The best practice may be to use a hybrid approach of well-known
81
data in the field along with new data applications during the comparative study of
algorithms. This may create and maintain users’ interest in FNNs over the passage of
time
7 A number of hidden units needed: The analytical calculation of hidden units to deal
with high dimensional large datasets, rather than trial and error, is gaining interest. The
number of hidden units needed in either single or multiple layers such that no
dependency exists can ensure maximum error reduction of a network.
Addressing all the above FNNs research gaps in current work is difficult. The work is more
focused on two important research gaps “Connection weight initialization” and “Data
structure” that need researchers' attention.
In summary, in order to address the above research gaps of fuel estimation and FNNs, the trip
fuel model is formulated, and a novel machine learning algorithm is proposed. A computational
comparison of the proposed algorithm is made with other known popular algorithms using
artificial benchmarking and real-world datasets to demonstrate its effectiveness. Lastly, the
proposed algorithm is applied to estimate trip fuel for airlines using historical real data. The
comparison of the proposed algorithm with existing AEA and BPNN based fuel models are
also made to enrich the literature.
82
Chapter 3: Trip fuel Model Formulation for Minimizing
Fuel Deviation
3.1 Introduction
In this chapter, our main focus is to formulate a model for estimating trip fuel. Prior to
formulating the model and defining an objective function, the framework of fuel consumption
and its deviation from estimation is concisely explained. Before the commencement of each
flight, various amounts of fuel are loaded in aircraft to meet certain requirements. The trip fuel,
comprising a large portion of various other fuels, is loaded to ensure the smooth journey. The
difference in trip fuel estimated and consumed after flight enables us to understand the reasons
causing the overestimation and underestimation of fuel. The major reason for causing higher
fuel deviation from estimation is because of unreliable estimation techniques and ignoring
some of the operational parameters that may highly contribute to fuel consumption. The
methods (or estimation techniques) that are popular to estimate fuel for aircraft are of two types:
mathematical method and a data-driven method. The mathematical methods help to provide a
physical understanding of the system. However, in a real application, mathematical methods
might be difficult to implement and inaccurate because a lot of information needed to represent
the relationship among variables (Kuo and Kusiak, 2019). Machine learning (data-driven) are
considered ideally suitable for learning from historical data to make a better-informed decision,
time and cost-saving. Among machine learning, NNs are more popular to solve problems
because of their universal approximation capability (Ferrari and Stengel, 2005; Hornik et al.,
1989; Huang, Chen, et al., 2006). It can solve any complex nonlinear problem more accurately
which is difficult using classical statistical techniques (Kumar et al., 1995; Tkáč and Verner,
2016; Tu, 1996). The NN range of applications is numerous and some areas include regression
83
estimation (Chung et al., 2017; Deng et al., 2019; Kummong and Supratid, 2016; Teo et al.,
2015), image processing (Dong et al., 2016; Mohamed Shakeel et al., 2019), image
segmentation (Chen et al., 2018), video processing (Babaee et al., 2018), speech recognition
(Abdel-Hamid et al., 2014), text classification (Kastrati et al., 2019; Zaghloul et al., 2009), face
classification and recognition (Yin and Liu, 2018), human action recognition (Ijjina and
Chalavadi, 2016), risk analysis (Nasir et al., 2019) and many others. With modern information
technology advancement, the challenging issue of high dimensional, non-linear, noisy and
unbalanced data is continuously growing and varying at a rapid rate so that it demands efficient
learning algorithms and optimization techniques. The data may become a costly resource if not
analysed properly. Machine learning is gaining popularity in all aspects from data gathering to
discovering knowledge and its role in enhancing business decisions is gaining significant
interest (Bottani et al., 2019; Hayashi et al., 2010; Kim et al., 2019; Lam et al., 2014; Li et al.,
2018; Mori et al., 2012; Wang et al., 2005; Wong et al., 2018).
Efforts are being made to overcome the challenges by building optimal NNs that may extract
useful patterns from the data and generate information for better-informed decision making.
Extensive knowledge and theoretical information are required to build NNs having the
characteristics of better generalization performance and learning speed. The generalization
performance and learning speed are the two criteria that play an essential role in deciding on
the use of learning algorithms and optimization techniques to build optimal NNs. Depending
upon the application and data structure, the user might prefer either better generalization
performance or faster learning speed, or a combination of both. In its simplest form, NN with
a single hidden layer is powerful in solving many problems, given that there are a sufficient
number of hidden units in the layer (Nguyen and Widrow, 1990). The application of NNs in
diverse topics is not simple and expertise is needed to build an optimal network to achieve the
84
intended results in the shortest possible time. More specifically, in our work, mathematical
methods can be referred to as EAs and data-driven methods can be referred to as NNs.
The use of global parameters rather than local parameters and the need for complex
mathematical calculations to determine the coefficient may cause a higher deviation of fuel
from estimation in EAs. BPNN is a suitable alternative, however, the weak generalization
performance and slow learning speed with needed user expertise may limit its application for
estimating fuel consumption. Unlike existing estimation methods in which operational
parameters are selected based on experience and knowledge, this research work segregates and
incorporates all those parameters which have a relationship to fuel consumption. This work
also considered some other important operational parameters that were ignored in the existing
literature. The statistical analysis and explanation show that extracted operational parameters
have a strong effect on fuel consumption and cannot be ignored. In the end, a model is
formulated, and the objective function of minimizing fuel deviation is defined.
The Chapter is organized as follows. Section 3.2 concisely explains the framework of fuel
consumption and its deviation from estimation. Section 3.3 is about complex high-level
operational parameters extraction and showing their relationship to fuel consumption,
constructing the relationship between mathematical and data-driven methods. Furthermore, the
significance of the proposed method is also elaborated before formulating a model for trip fuel.
Section 3.4 summarizes the chapter.
3.2 Fuel consumption and deviation problem framework
In this study, we work on a dataset obtained from an international airline operating in Hong
Kong. Currently, it experiences the usual problem of excess fuel consumption that increases its
fuel expenses. Before each flight operation, the flight plan is prepared such that it contains
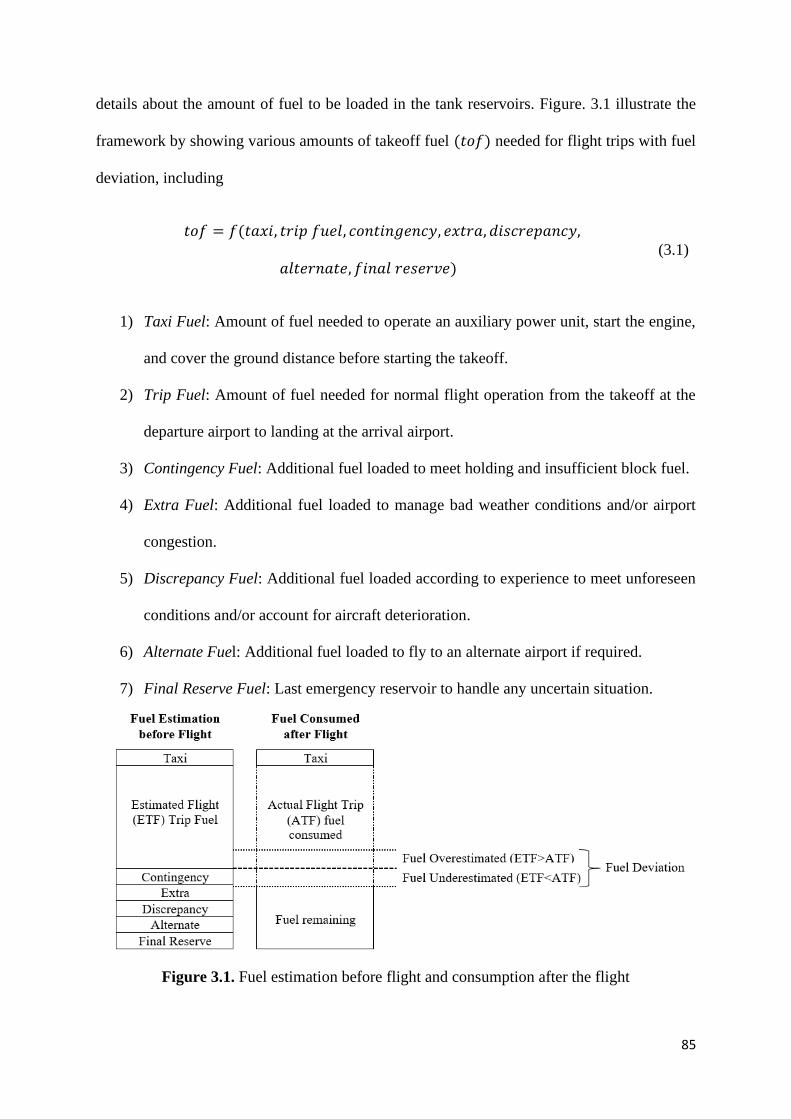
85
details about the amount of fuel to be loaded in the tank reservoirs. Figure. 3.1 illustrate the
framework by showing various amounts of takeoff fuel (𝑡𝑜𝑓) needed for flight trips with fuel
deviation, including
𝑡𝑜𝑓 = 𝑓(𝑡𝑎𝑥𝑖, 𝑡𝑟𝑖𝑝 𝑓𝑢𝑒𝑙, 𝑐𝑜𝑛𝑡𝑖𝑛𝑔𝑒𝑛𝑐𝑦, 𝑒𝑥𝑡𝑟𝑎, 𝑑𝑖𝑠𝑐𝑟𝑒𝑝𝑎𝑛𝑐𝑦,
𝑎𝑙𝑡𝑒𝑟𝑛𝑎𝑡𝑒, 𝑓𝑖𝑛𝑎𝑙 𝑟𝑒𝑠𝑒𝑟𝑣𝑒) (3.1)
1) Taxi Fuel: Amount of fuel needed to operate an auxiliary power unit, start the engine,
and cover the ground distance before starting the takeoff.
2) Trip Fuel: Amount of fuel needed for normal flight operation from the takeoff at the
departure airport to landing at the arrival airport.
3) Contingency Fuel: Additional fuel loaded to meet holding and insufficient block fuel.
4) Extra Fuel: Additional fuel loaded to manage bad weather conditions and/or airport
congestion.
5) Discrepancy Fuel: Additional fuel loaded according to experience to meet unforeseen
conditions and/or account for aircraft deterioration.
6) Alternate Fuel: Additional fuel loaded to fly to an alternate airport if required.
7) Final Reserve Fuel: Last emergency reservoir to handle any uncertain situation.
Figure 3.1. Fuel estimation before flight and consumption after the flight
86
The trip fuel consists of a large portion of the aircraft reservoir, whereas, other fuels are loaded
based on requirements and to meet international regulation for a safe journey. Currently, the
airline trip fuel estimation is based on various factors such as flight time, weight, wind speed,
altitude, speed, etc. This estimated trip fuel is loaded to aircraft with other additional reserves
for smooth flight operations. As illustrated in Figure 3.1, after flight operations, the actual trip
fuel usually deviates from estimated fuel. The difference between fuel consumed and estimated
is known as fuel deviation. The fuel deviation may be positive or negative. When actual fuel
consumed is less than fuel estimated then it is considered that fuel was overestimated, and fuel
deviation is positive. Contrary, when actual fuel consumed is more than fuel estimated that it
is considered that fuel was underestimated, and fuel deviation is negative. Both situations are
undesirable for the smooth operation of aircraft. Fuel comprises a major portion of the aircraft
weight and its overestimation can cause an increase in the total weight of the aircraft, which
needs more thrust and force to balance the increase in weight and drag with other features,
resulting in more fuel consumption. Similarly, underestimation can create safety issues.
Underestimated fuel may create problems in reaching the destination safely and may need
utilization of some fuel from the supplementary reservoirs which are held back for other
reasons and emergency purposes. This creates less confidence in the fuel estimation system
and additional fuel is loaded based on experience in the discrepancy reservoir.
Other than fuel deviation, suboptimal fuel loading may cause some other major drawbacks:
adding extra fuel in a discrepancy reservoir may result in worse management control and may
need more frequent aircraft maintenance than planned which may shorten the life of engine
causing huge economic losses to airlines. The major reason for causing higher fuel deviation
from estimation is because of ignoring some of the operational parameters that may highly
contribute to fuel consumption and unreliable estimation methods.
87
3.3 Model formulation
This section is divided into three major subsections. In Subsection 3.3.1, the real historical data
is statistically analysed to extract complex high-level operational parameters that significantly
influence fuel consumption. In Subsection 3.3.2, the mathematical and data-driven methods are
elaborated, and their relationship is constructed. Furthermore, the significance of the proposed
method is also explained to understand the purpose and need of the work. Subsection 3.3.3 is
about trip fuel model formulation. The model is formulated by defining an objective function
of minimizing fuel deviation and to overcome the existing limitations.
3.3.1 Complex high-level operational parameters
3.3.1.1 Statistical analysis and extraction
To achieve the objectives of better fuel estimation with less expertise requirement and faster
learning speed, our study focuses on analysing high-dimensional data (Choi et al., 2018; Chung
et al., 2015). These high-dimensional data were provided by the airline and contain details
about historical real flights operated from April 2015 to March 2017. The useful operational
parameters are extracted from data that contributes to fuel consumption. The extracted data are
applied to estimate the trip fuel before each flight and compare it with actual consumed fuel to
measure fuel deviation in absolute percentage error. The comparative study is performed
among existing AEA, a BPNN, and the proposed CNN (discussed in Section 4.4). These
methods are used to estimate fuel for each flight. The one leading to a lesser fuel deviation is
considered for its effectiveness.
During each flight operation, the aircraft generates a considerable amount of high-dimensional
data with many operational parameters. The selection of relevant operational parameters plays
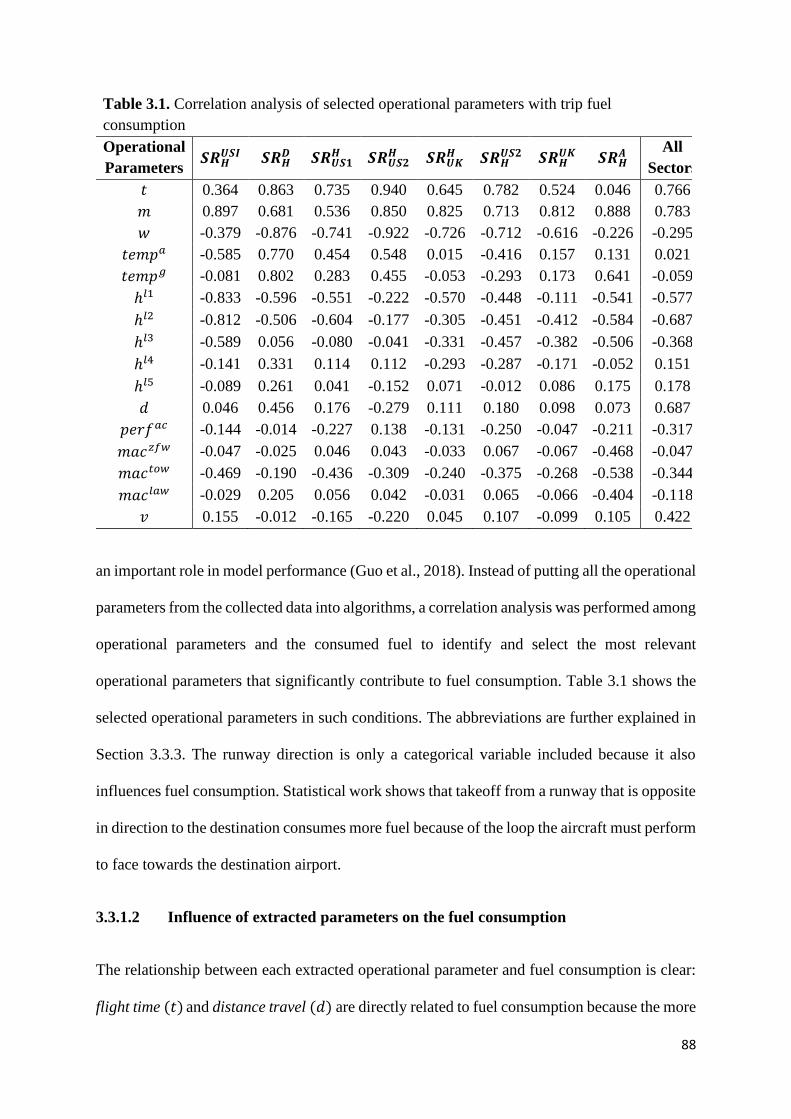
88
an important role in model performance (Guo et al., 2018). Instead of putting all the operational
parameters from the collected data into algorithms, a correlation analysis was performed among
operational parameters and the consumed fuel to identify and select the most relevant
operational parameters that significantly contribute to fuel consumption. Table 3.1 shows the
selected operational parameters in such conditions. The abbreviations are further explained in
Section 3.3.3. The runway direction is only a categorical variable included because it also
influences fuel consumption. Statistical work shows that takeoff from a runway that is opposite
in direction to the destination consumes more fuel because of the loop the aircraft must perform
to face towards the destination airport.
3.3.1.2 Influence of extracted parameters on the fuel consumption
The relationship between each extracted operational parameter and fuel consumption is clear:
flight time (𝑡) and distance travel (𝑑) are directly related to fuel consumption because the more
Table 3.1. Correlation analysis of selected operational parameters with trip fuel
consumption
Operational
Parameters 𝑺𝑹𝑯
𝑼𝑺𝑰 𝑺𝑹𝑯𝑫 𝑺𝑹𝑼𝑺𝟏
𝑯 𝑺𝑹𝑼𝑺𝟐𝑯 𝑺𝑹𝑼𝑲
𝑯 𝑺𝑹𝑯𝑼𝑺𝟐 𝑺𝑹𝑯
𝑼𝑲 𝑺𝑹𝑯𝑨
All
Sectors
𝑡 0.364 0.863 0.735 0.940 0.645 0.782 0.524 0.046 0.766
𝑚 0.897 0.681 0.536 0.850 0.825 0.713 0.812 0.888 0.783
𝑤 -0.379 -0.876 -0.741 -0.922 -0.726 -0.712 -0.616 -0.226 -0.295
𝑡𝑒𝑚𝑝𝑎 -0.585 0.770 0.454 0.548 0.015 -0.416 0.157 0.131 0.021
𝑡𝑒𝑚𝑝𝑔 -0.081 0.802 0.283 0.455 -0.053 -0.293 0.173 0.641 -0.059
ℎ𝑙1 -0.833 -0.596 -0.551 -0.222 -0.570 -0.448 -0.111 -0.541 -0.577
ℎ𝑙2 -0.812 -0.506 -0.604 -0.177 -0.305 -0.451 -0.412 -0.584 -0.687
ℎ𝑙3 -0.589 0.056 -0.080 -0.041 -0.331 -0.457 -0.382 -0.506 -0.368
ℎ𝑙4 -0.141 0.331 0.114 0.112 -0.293 -0.287 -0.171 -0.052 0.151
ℎ𝑙5 -0.089 0.261 0.041 -0.152 0.071 -0.012 0.086 0.175 0.178
𝑑 0.046 0.456 0.176 -0.279 0.111 0.180 0.098 0.073 0.687
𝑝𝑒𝑟𝑓𝑎𝑐 -0.144 -0.014 -0.227 0.138 -0.131 -0.250 -0.047 -0.211 -0.317
𝑚𝑎𝑐𝑧𝑓𝑤 -0.047 -0.025 0.046 0.043 -0.033 0.067 -0.067 -0.468 -0.047
𝑚𝑎𝑐𝑡𝑜𝑤 -0.469 -0.190 -0.436 -0.309 -0.240 -0.375 -0.268 -0.538 -0.344
𝑚𝑎𝑐𝑙𝑎𝑤 -0.029 0.205 0.056 0.042 -0.031 0.065 -0.066 -0.404 -0.118
𝑣 0.155 -0.012 -0.165 -0.220 0.045 0.107 -0.099 0.105 0.422
89
the aircraft is airborne, the more the fuel it will consume. Flight duration and covered distance
significantly contribute to aircraft operational expenses. The cost index (CI) is used to adjust
the speed (𝑣) of aircraft to a trade-off between higher operational expenses or more fuel-saving
(Edwards et al., 2016). The operational expenses can include crew time, leasing rate, plan
maintenance, landing and take-off fees, and ground services. All of them play major roles in
deciding whether to keep the aircraft airborne to make the airline profitable. The CI ranges
from 0 to 999 and is expressed as
𝐶𝐼 =𝐹𝑙𝑦𝑖𝑛𝑔 𝐶𝑜𝑠𝑡
𝐹𝑢𝑒𝑙 𝐶𝑜𝑠𝑡 (3.2)
When fuel is expensive, the CI will be lower, which means a slower speed of the aircraft.
Operating an aircraft at low-speed results in a higher climb rate due to excessive engine thrust
and, simultaneously, it is recommended to fly at a higher altitude to lower fuel consumption.
Similarly, when fuel is cheap, the CI will be higher, and a faster aircraft will operate to be less
airborne to reduce the amount of operational cost at the cost of more consumed fuel. Note that
the CI shortens or lengthens the airborne phase by changing the aircraft speed depending on
fuel prices and operational expenses to cut overall expenses.
The ramp weight (𝑚) can be expressed according to the following combination (Pagoni and
Psaraki-Kalouptsidi, 2017):
𝑚 = 𝑧𝑓𝑤 + 𝑡𝑜𝑓 (3.3)
Zero fuel weight (𝑧𝑓𝑤) is the total weight of an aircraft including crew, passengers, and
unusable fuel, minus the total weight of the usable fuel. During flight operation, the 𝑧𝑓𝑤
remains constant whereas 𝑡𝑜𝑓 weight decreases over time because of its continuous
90
consumption. This reduces the value of 𝑚 for an aircraft and ultimately decreases fuel
consumption over time.
A suitable choice of wind direction (𝑤) has a significant influence on fuel consumption. The
headwind that blows in a direction opposite to the aircraft is more favorable during takeoff and
landing. The aerofoils can generate more lift during takeoff and more induced drag during
landing. Tailwind that blows in the direction of the aircraft flight path is helpful during the
cruise phase as the aircraft travels faster and saves fuel at the same ground speed (Irrgang et
al., 2015). The ground speed is determined by the vector sum of aircraft speed, wind speed,
and direction. Headwind subtracts from the ground speed, while tailwind is added to the ground
speed.
The altitude (ℎ) can be used to assess the aerodynamic performance of an aircraft at certain
atmospheric conditions. Flying at higher altitudes can significantly save fuel consumption
because of less drag (Turgut and Rosen, 2012). Simultaneously, it may face a problem of low-
density air for fuel combustion that may result in more fuel flow to the engine. Therefore, the
altitude is adjusted for a non-standard temperature known as density altitude and can be
expressed as
𝐷𝐴 = 𝑃𝐴 + (118.8 𝑓𝑡/ C𝑜 )(𝑂𝐴𝑇 − 𝐼𝑆𝐴 𝑇𝑒𝑚𝑝) (3.4)
𝑃𝐴 = ℎ + (30𝑓𝑡/𝑚𝑖𝑙𝑙𝑖𝑏𝑎𝑟)(1013𝑚𝑖𝑙𝑙𝑖𝑏𝑎𝑟 − 𝑄𝑁𝐻) (3.5)
where 𝐷𝐴 is the density altitude in feet, 𝑃𝐴 is the pressure altitude in feet, 𝑄𝑁𝐻 is the
atmospheric pressure in millibar, 𝑂𝐴𝑇 is the outside air temperature in degree Celsius, and
𝐼𝑆𝐴 𝑇𝑒𝑚𝑝 is the international standard atmospheric temperature in degree Celsius. Aircrafts
are designed for specific optimal altitude, what minimizes fuel consumption. A change in that
altitude may cause aircrafts to burn more fuel (Diao and Chen, 2018).
91
The weight and balance of aircrafts can be expressed in terms of the percentage of the mean
aerodynamic chord (𝑚𝑎𝑐) (Dancila et al., 2013).
𝑚𝑎𝑐% =
((∑ 𝑤𝑖𝑎𝑖
𝑁𝑖=1 )𝑚 − 𝑙𝑒𝑚𝑎𝑐)
𝑡𝑒𝑚𝑎𝑐 − 𝑙𝑒𝑚𝑎𝑐
(3.6)
where (∑ 𝑤𝑖𝑎𝑖
𝑁𝑖=1 )
𝑚 is defined as the center of gravity (COG) with 𝑤 denoting component weights
and 𝑎 denoting the arm value, defined both as the moment arm (𝑤𝑎). 𝑙𝑒𝑚𝑎𝑐 and 𝑡𝑒𝑚𝑎𝑐 are
the leading-edge mean aerodynamic chord and tail-edge mean aerodynamic chord,
respectively. Improper distribution of aircraft weight may shift its COG forward and may need
more tail lift force for stable flight. The tail force ultimately increases the aircraft angle of
attack, which may cause aircrafts to face more induced drag. Therefore, the aircraft weight
balance (at the center of aircraft) should be maintained at zero fuel weight during takeoff and
landing phases to avoid the generation of excess induced drag and reduce fuel consumption.
The location and direction of the runway have clear effects on fuel consumption (Singh and
Sharma, 2015). Runway directions are identified by a number within the range 1 to 36, which
are magnetic azimuths in decadegrees. A runway number 09 means pointing toward the east
(90°), 18 means pointing toward the south (180°), 27 means pointing toward the west (270°),
and 36 means pointing toward the north (360°). Furthermore, if there is more than one runway
in the same direction, then the location is differentiated with a letter as follows: L for left, C
for a center, and R for right. It is more favorable to take off from a runway that faces the
headwind direction. However, it can also be a source of excess fuel consumption. If that
favorable runway is in the opposite direction to the allocated flight path, the aircraft must take
a loop to head towards the allocated path.
3.3.2 Mathematical and data-driven solution methods
92
In this section, the EA mathematical method and the BPNN data-driven method are concisely
explained to understand the complexity of both methods. The purpose is to reduce the
complexity of estimation methods to achieve minimum fuel deviation with less human
intervention.
EAs are based on the extensive mathematical formulation and are derived from the basic
concept of energy balance by accepting static constants of aircraft performance and the
dynamic input of the path profile (Collins, 1982). The energy balance can be expressed as
energy gain and loss by the aircraft as it travels along with the path profile:
𝑒𝑛𝑒𝑟𝑔𝑦 𝑔𝑎𝑖𝑛 − 𝑒𝑛𝑒𝑟𝑔𝑦 𝑙𝑜𝑠𝑠 = 𝑒𝑛𝑒𝑟𝑔𝑦 𝑐ℎ𝑎𝑛𝑔𝑒 (3.7)
𝐸𝑇 − 𝐸𝐷 = △ 𝐾𝐸 + △ 𝑃𝐸 (3.8)
During each flight operation, the change in kinetic △𝐾𝐸 and potential △ 𝑃𝐸 energies, the
aircraft suffers energy losses because of drag 𝐸𝐷 is adjusted by the amount of thrust 𝐸𝑇 to
maintain the energy balance. Thus, aircraft can be considered a system with energy losses and
gains that should be continuously balanced by the consumption of fuel energy. Collins (1982)
derived an algorithm for fuel estimation based on the aircraft configuration, weight and path
profile. The path profile may be described by considering a change in true airspeed, altitude
and time, with the following expressions for fuel estimation:
�̂� =
𝑡𝑣�̅�𝐹𝑁𝑣𝑡𝑃
+ 𝑡(𝐿𝐴𝑀1) (3.9)
Such that
𝐹𝑁 =
𝑅1𝐾12
�̅�𝑆𝑤𝑣𝑡2̅̅ ̅ +
2𝑅2𝐾2𝑚2
�̅�𝑆𝑤𝑣𝑡2̅̅ ̅+𝑚
𝑔𝑡(𝑣𝑡2 − 𝑣𝑡1) +
𝑚
𝑡𝑣𝑡(ℎ2 − ℎ1)
(3.10)

93
𝑃 = 𝐾10𝑒
𝐾11𝑣𝑡̅̅ ̅ + 𝐾12 (ℎ12 + ℎ1ℎ2 + ℎ2
2
3) + 𝐾13 (
ℎ1 + ℎ23
) + 𝐾14 (3.11)
𝐿𝐴𝑀1 = {
0 𝑖𝑓 𝐹𝑁 ≤ 𝐾7𝐾8𝐹𝑁 + 𝐾9 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
(3.12)
where �̂� is fuel estimation, 𝑡 is time, 𝑣 is true velocity, �̅� is average velocity, 𝐹𝑁 is thrust, 𝑃 is
thrust energy, 𝐿𝐴𝑀1 is a relationship between fuel flow and thrust, �̅� is average atmospheric
density, 𝑆𝑤 is wing area, 𝑚 is weight, 𝑔 is the gravitational acceleration and ℎ is altitude. In
the Equations (3.10), (3.11) and (3.12), Collins (1982) explained that 𝐾1, 𝐾2, 𝑅1, 𝑅2,
𝐾7, 𝐾8, 𝐾9, 𝐾10, 𝐾11, 𝐾12, 𝐾13, 𝐾14 and 𝑆𝑤 are aircraft specific constant and need to be
determined for each aircraft. Constants 𝐾1, 𝐾2 and 𝑆𝑤 determine the relationship between drag
and lift/weight coefficient and constants 𝐾10, 𝐾11, 𝐾12, 𝐾13 and 𝐾14 determine the relationship
between fuel consumption and energy gain from the thrust as a function of velocity and altitude.
The drag increases with the change in a configuration such as gear up or gear down and can be
expressed as:
𝑅1 = 𝐺𝑈1𝐹3 + 𝐺𝑈2𝐹
2 + 𝐺𝑈3𝐹 + 1 (𝑔𝑒𝑎𝑟 𝑢𝑝) (3.13)
𝑅1 = 𝐺𝐷1𝐹3 + 𝐺𝐷2𝐹
2 + 𝐺𝐷3𝐹 + 1 (𝑔𝑒𝑎𝑟 𝑑𝑜𝑤𝑛) (3.14)
𝑅2 = 𝐹𝐷𝑀1𝐹3 + 𝐹𝐷𝑀2𝐹
2 + 𝐹𝐷𝑀3𝐹 + 1 (3.15)
where 𝐹 is flap angle, 𝐷 is drag and 𝑀 is Mach number. Experimental work demonstrates that
the algorithm could result in saving more than two million US gallons of fuel annually. The
accuracy check of the algorithm with Eastern Airlines demonstrates its effectiveness with a
difference of less than 3%. This algorithm named as AFBM and was developed by MITRE,
under the FAA, and was incorporated in their simulation software Simmod to predict the fuel
consumption for each flight (Baklacioglu, 2016; Schilling, 1997). Similarly, The BADA

94
developed by Eurocontrol (Nuic, 2014) is another mathematical-based fuel estimation method
that estimates thrust specific fuel consumption (TSFC) 𝜂 as a function of true airspeed 𝑣𝑇𝐴𝑆.
The BADA provide files on performance and operating procedure coefficients of various
aircraft. The coefficients are needed to determine fuel flow, drag and thrust needed to specify
cruise, climb and descent speeds. The fuel for different phases and engines can be expressed
as:
𝜂 =
{
𝐶𝑓1 (1 +
𝑣𝑇𝐴𝑆𝐶𝑓2
) , 𝐽𝑒𝑡 𝐸𝑛𝑔𝑖𝑛𝑒
𝐶𝑓1 (1 +𝑣𝑇𝐴𝑆𝐶𝑓2
) (𝑣𝑇𝐴𝑆1000
) , 𝑇𝑢𝑟𝑏𝑜𝑝𝑟𝑜𝑝 𝐸𝑛𝑔𝑖𝑛𝑒
(3.16)
�̂�𝑛𝑜𝑚 = 𝜂𝑇ℎ𝑟, 𝐽𝑒𝑡 𝑎𝑛𝑑 𝑇𝑢𝑟𝑏𝑜 𝐸𝑛𝑔𝑖𝑛𝑒 (3.17)
�̂�𝑛𝑜𝑚 = 𝐶𝑓1, 𝑃𝑖𝑠𝑡𝑜𝑛 𝐸𝑛𝑔𝑖𝑛𝑒 (3.18)
where �̂�𝑛𝑜𝑚 is nominal fuel estimation and 𝐶𝑓1, 𝐶𝑓2 are fuel flow coefficients for the specific
aircraft type and are derived in OPF of the BADA. Equations (3.16), (3.17) and (3.18) are used
for fuel estimation in all flight phases except during idle descent and cruise. The following
mathematical calculations need to be performed to estimate the fuel consumption for idle
descent phase of flight:
�̂�𝑚𝑖𝑛 = 𝐶𝑓3 (1 +
𝐻𝑝
𝐶𝑓4) , 𝐽𝑒𝑡 𝑎𝑛𝑑 𝑇𝑢𝑟𝑏𝑜 𝐸𝑛𝑔𝑖𝑛𝑒
(3.19)
�̂�𝑚𝑖𝑛 = 𝐶𝑓3, 𝑃𝑖𝑠𝑡𝑜𝑛 𝐸𝑛𝑔𝑖𝑛𝑒 (3.20)
where �̂�𝑚𝑖𝑛 is minimal fuel estimation and 𝐶𝑓3, 𝐶𝑓4 are the fuel flow coefficient. When an
aircraft switches from idle descent and reaches the approach 𝑎𝑝 and landing 𝑙𝑑 phase, the thrust
is increased. The calculation for fuel flow at approach and landing phase can be expressed as:
95
�̂�𝑎𝑝/𝑙𝑑 = 𝑀𝐴𝑋(�̂�𝑛𝑜𝑚, �̂�𝑚𝑖𝑛), 𝐽𝑒𝑡 𝑎𝑛𝑑 𝑇𝑢𝑟𝑏𝑜 𝐸𝑛𝑔𝑖𝑛𝑒 (3.21)
Cruise phase fuel is estimated by using 𝜂, cruise thrust 𝑇ℎ𝑟 and the cruise fuel flow factor 𝐶𝑓𝑐𝑟
for jet and turbo engine, and fuel coefficients 𝐶𝑓1 and 𝐶𝑓3 for piston engine:
�̂�𝑐𝑟 = 𝜂 x 𝑇ℎ𝑟 x 𝐶𝑓𝑐𝑟, 𝐽𝑒𝑡 𝑎𝑛𝑑 𝑇𝑢𝑟𝑏𝑜 𝐸𝑛𝑔𝑖𝑛𝑒 (3.22)
�̂�𝑐𝑟 = 𝐶𝑓1x 𝐶𝑓3, 𝑃𝑖𝑠𝑡𝑜𝑛 𝐸𝑛𝑔𝑖𝑛𝑒 (3.23)
The BADA manual contains detailed mathematical expressions needed to calculate the thrust
𝑇ℎ𝑟 for each flight phase of the climb, take-off, cruise, descent, approach, and landing.
BPNN data-driven method is considered as an alternative for EAs based fuel estimation
models. A BPNN is defined as a network that does not form a cycle. All the connection signals
exist from the input unit 𝑿 to the output unit 𝒀 only in the forward direction. Note that 𝑿 and
𝒀 are connected through a number of hidden units 𝑯 by a series of connection weights without
any cycle or loop (Hecht-Nielsen, 1989). Figure 3.2 illustrates a simple BPNN with three
layers. The number of hidden units and layers in the BPNN determines its topology structure.
A BPNN with one hidden layer is known as shallow type, whereas a BPNN featuring more
than one hidden layer is known as deep type (Bianchini and Scarselli, 2014; LeCun et al.,
2015). The weights 𝑾 connecting 𝑿 to 𝑯 are known as input connection weights whereas the
weights 𝜷 connecting 𝑯 to 𝒀 are known as output connection weights. A BPNN is initialized
by randomly defined hyperparameters, for instance, learning rate, connection weights, hidden
units, and hidden layers. Training a model involves two steps, i.e., forward propagation and
backward propagation. BPNN can be consider a type of the FNN. In the forward propagation
step, the output �̂� is estimated by taking ∅ from the product of 𝑯 and 𝜷. Suppose 𝑿 be m×n, 𝒀
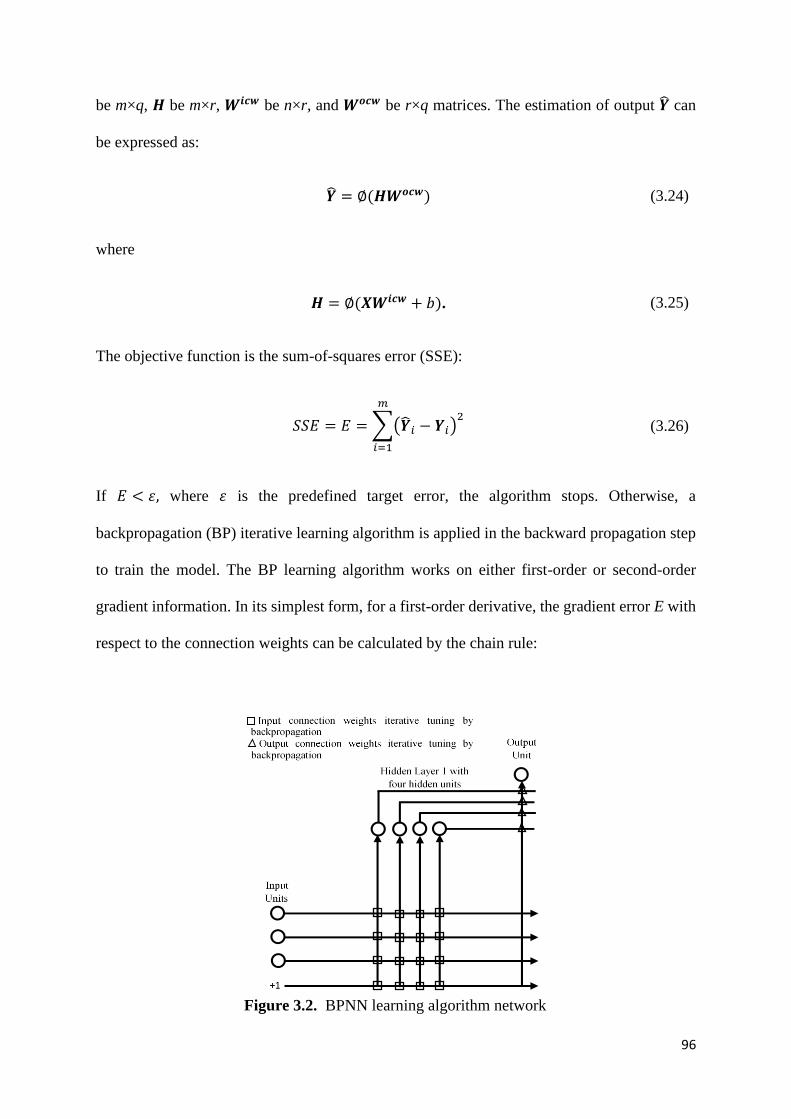
96
be m×q, 𝑯 be m×r, 𝑾𝒊𝒄𝒘 be n×r, and 𝑾𝒐𝒄𝒘 be r×q matrices. The estimation of output �̂� can
be expressed as:
�̂� = ∅(𝑯𝑾𝒐𝒄𝒘) (3.24)
where
𝑯 = ∅(𝑿𝑾𝒊𝒄𝒘 + 𝑏). (3.25)
The objective function is the sum-of-squares error (SSE):
𝑆𝑆𝐸 = 𝐸 =∑(�̂�𝑖 − 𝒀𝑖)2
𝑚
𝑖=1
(3.26)
If 𝐸 < 𝜀, where 𝜀 is the predefined target error, the algorithm stops. Otherwise, a
backpropagation (BP) iterative learning algorithm is applied in the backward propagation step
to train the model. The BP learning algorithm works on either first-order or second-order
gradient information. In its simplest form, for a first-order derivative, the gradient error E with
respect to the connection weights can be calculated by the chain rule:
Figure 3.2. BPNN learning algorithm network
97
𝜕𝐸
𝜕𝑾𝑖𝒐𝒄𝒘 =
𝜕𝐸
𝜕𝑜𝑢𝑡𝑖
𝜕𝑜𝑢𝑡𝑖𝜕𝑛𝑒𝑡𝑖
𝜕𝑛𝑒𝑡𝑖𝜕𝑾𝑖
𝒐𝒄𝒘 (3.27)
where 𝜕𝐸
𝜕𝑾𝑖𝒐𝒄𝒘 is a partial derivative of the error with respect to 𝑾𝑖
𝒐𝒄𝒘 for iteration 𝑖, 𝑜𝑢𝑡𝑖 is the
activation output, and 𝑛𝑒𝑡𝑖 is the weighted sum of the inputs of 𝑯.
Thus, for updating the output connection weight 𝑾𝑖+1𝒐𝒄𝒘, we have
𝑾𝑖+1𝒐𝒄𝒘 = 𝑾𝑖
𝒐𝒄𝒘 − 𝜂𝜕𝐸
𝜕𝑾𝑖𝒐𝒄𝒘 (3.28)
Similarly, for updating the input connection weight 𝑾𝑖+1𝒊𝒄𝒘, we apply
𝑾𝑖+1𝒊𝒄𝒘 = 𝑾𝑖
𝒊𝒄𝒘 − 𝜂𝜕𝐸
𝜕𝑾𝑖𝒊𝒄𝒘
(3.29)
A similar procedure is followed for second-order derivative learning algorithms. The updated
new connection weights are forward propagated and 𝐸 is recalculated. The connection weights
are trained after each iteration to obtain a minimum gradient error. When E converges or starts
increasing, the algorithm is stopped.
3.3.2.1 Relationship between mathematical and data-driven methods
Senzig et al. (2009) highlighted that BADA is an effective method that works better for the
cruise phase; however, it loses accuracy for terminal areas such as takeoff and descent. Besides,
the information needed to determine coefficients for mathematical methods is not always
available in a real scenario and it needs to be generated from other sources, which may limit
their applicability (Pagoni and Psaraki-Kalouptsidi, 2017; Trani and Wing-Ho, 1997; Yanto
and Liem, 2018). The estimation of trip fuel by EA usually results in a higher deviation of fuel
from estimation. The usage of more global parameters, with default values, rather than local
98
parameters and complex mathematical calculation requiring information about many
coefficient results in the suboptimal estimation of fuel. BPNN has gained much popularity in
estimating fuel consumption and its usage may overcome EA limitations to some extents,
however, it has certain problems that can influence its generalization performance and learning
speed causing higher fuel deviation (Huang, Zhu, et al., 2006; Srivastava et al., 2014). The
major drawbacks are:
1. being trapped in a local minimum when the global minimum is far away
2. facing a problem of saddle point
3. the convergence decreases at plateau surface
4. network performance is affected by hyperparameter initialization and adjustment
5. needs trial and error approaches and expert involvement
6. repeatedly tuning of connection weights
7. hidden units and layers adjustments.
In addition to the drawbacks mentioned above, the following human expertise significantly
affects the fuel estimation results of BPNNs:
1. What should be the network size and depth i.e. shallow or deep?
2. How many hidden units should be generated by each hidden layer?
3. How many hidden layers will be sufficient for deep learning?
4. What should be network initial connection weights and learning rate?
5. How should the hyperparameters be adjusted?
6. What should be the size of the dataset during network training?
7. Which learning algorithm should be implemented?
8. Which network topology is more efficient i.e. fixed or cascade?
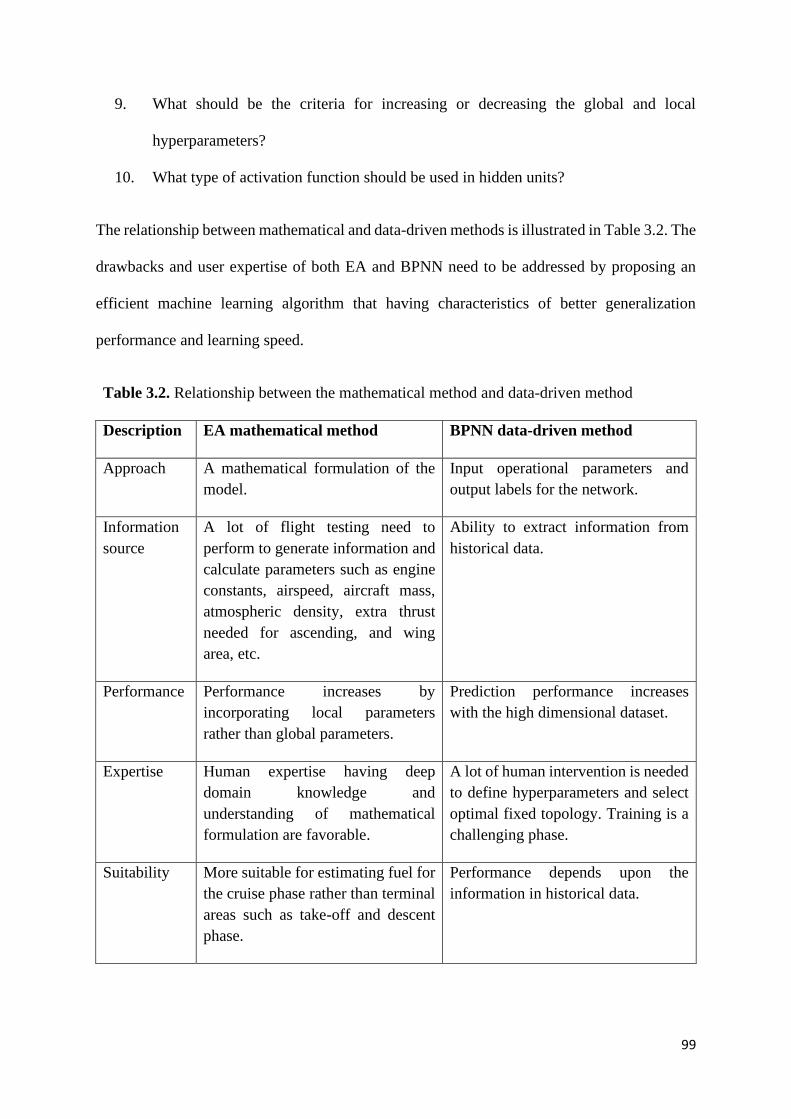
99
9. What should be the criteria for increasing or decreasing the global and local
hyperparameters?
10. What type of activation function should be used in hidden units?
The relationship between mathematical and data-driven methods is illustrated in Table 3.2. The
drawbacks and user expertise of both EA and BPNN need to be addressed by proposing an
efficient machine learning algorithm that having characteristics of better generalization
performance and learning speed.
Table 3.2. Relationship between the mathematical method and data-driven method
Description EA mathematical method BPNN data-driven method
Approach A mathematical formulation of the
model.
Input operational parameters and
output labels for the network.
Information
source
A lot of flight testing need to
perform to generate information and
calculate parameters such as engine
constants, airspeed, aircraft mass,
atmospheric density, extra thrust
needed for ascending, and wing
area, etc.
Ability to extract information from
historical data.
Performance Performance increases by
incorporating local parameters
rather than global parameters.
Prediction performance increases
with the high dimensional dataset.
Expertise Human expertise having deep
domain knowledge and
understanding of mathematical
formulation are favorable.
A lot of human intervention is needed
to define hyperparameters and select
optimal fixed topology. Training is a
challenging phase.
Suitability More suitable for estimating fuel for
the cruise phase rather than terminal
areas such as take-off and descent
phase.
Performance depends upon the
information in historical data.
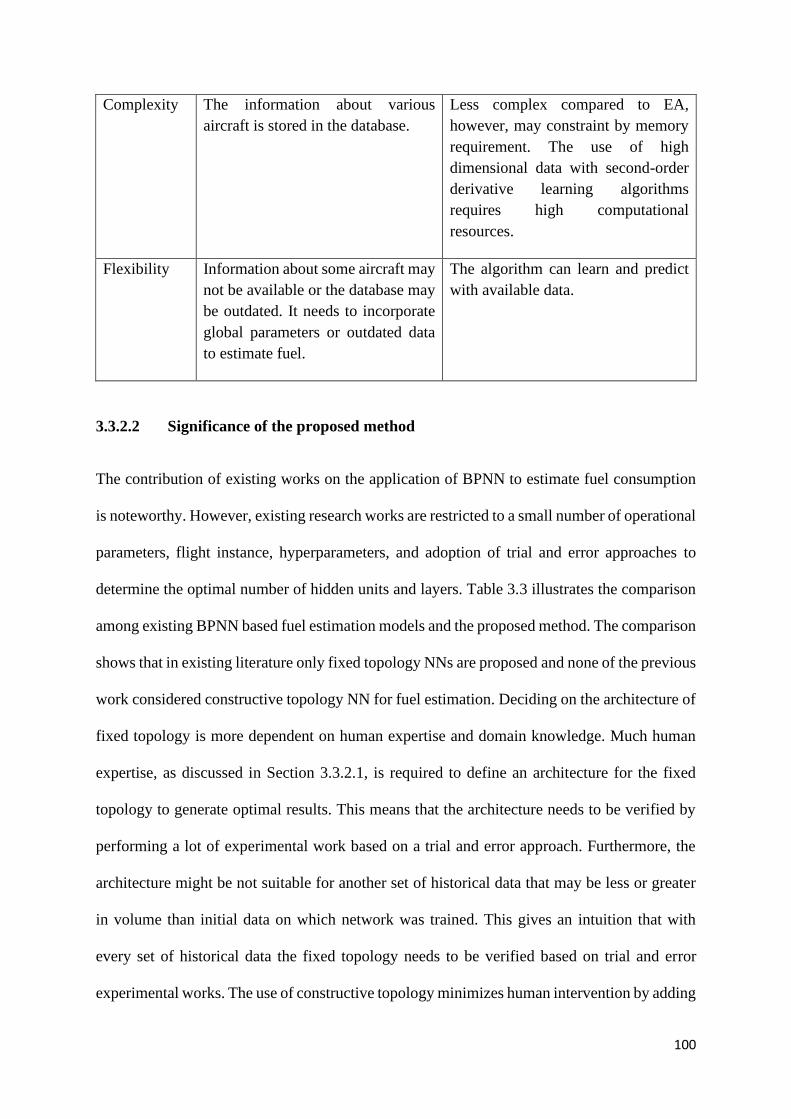
100
Complexity The information about various
aircraft is stored in the database.
Less complex compared to EA,
however, may constraint by memory
requirement. The use of high
dimensional data with second-order
derivative learning algorithms
requires high computational
resources.
Flexibility Information about some aircraft may
not be available or the database may
be outdated. It needs to incorporate
global parameters or outdated data
to estimate fuel.
The algorithm can learn and predict
with available data.
3.3.2.2 Significance of the proposed method
The contribution of existing works on the application of BPNN to estimate fuel consumption
is noteworthy. However, existing research works are restricted to a small number of operational
parameters, flight instance, hyperparameters, and adoption of trial and error approaches to
determine the optimal number of hidden units and layers. Table 3.3 illustrates the comparison
among existing BPNN based fuel estimation models and the proposed method. The comparison
shows that in existing literature only fixed topology NNs are proposed and none of the previous
work considered constructive topology NN for fuel estimation. Deciding on the architecture of
fixed topology is more dependent on human expertise and domain knowledge. Much human
expertise, as discussed in Section 3.3.2.1, is required to define an architecture for the fixed
topology to generate optimal results. This means that the architecture needs to be verified by
performing a lot of experimental work based on a trial and error approach. Furthermore, the
architecture might be not suitable for another set of historical data that may be less or greater
in volume than initial data on which network was trained. This gives an intuition that with
every set of historical data the fixed topology needs to be verified based on trial and error
experimental works. The use of constructive topology minimizes human intervention by adding
101
hidden units at each hidden layer and the process continues until error convergence. This makes
CNN more like deep learning having multiple hidden units and hidden layers in the network.
Unlike fixed topology, CNN advantageous in that it is not affected by the change in the
historical data set. For historical data that may be less or greater than initial data, the CNN
network gets to learn in smaller or larger sizes respectively.
It should be noted that low-level operational parameters, e.g. altitude, speed, and weight, are
commonly used for estimation in existing BPNN models and many other important operational
parameters are ignored that have a significant effect on fuel consumption. The importance of
operational parameters in estimating fuel consumption cannot disagree. Machine learning
algorithms depend on historical data and incorporating operational parameters that contribute
to fuel consumption can improve the generalization performance of the network. Studying low
operational parameters in existing works is because of low generalization performance and
slower convergence of BPNN with a lot of expertise needed to define hyperparameters. To
address this issue, the present work incorporates high-level operational parameters in the
proposed method that have a significant effect on fuel consumption.
Another important point that strengthens this work is that we considered high dimensional data
covering large fleet and various sectors to estimate fuel for all phases collectively. The flights
performed by various aircraft in same or different sector assists to generate data covering
different geographical regions. Studying a single aircraft or single sector may make it difficult
for NNs to capture the varying behavior of the operational parameters. For instance, if aircraft-
A is used for sector-A, then the network learned might be unsuitable to predict fuel for sector-
B using the same aircraft. The sector-A geographical conditions might be different from sector-
B. Similarly, if sector-A use aircraft-A, then the network learned might be unsuitable for
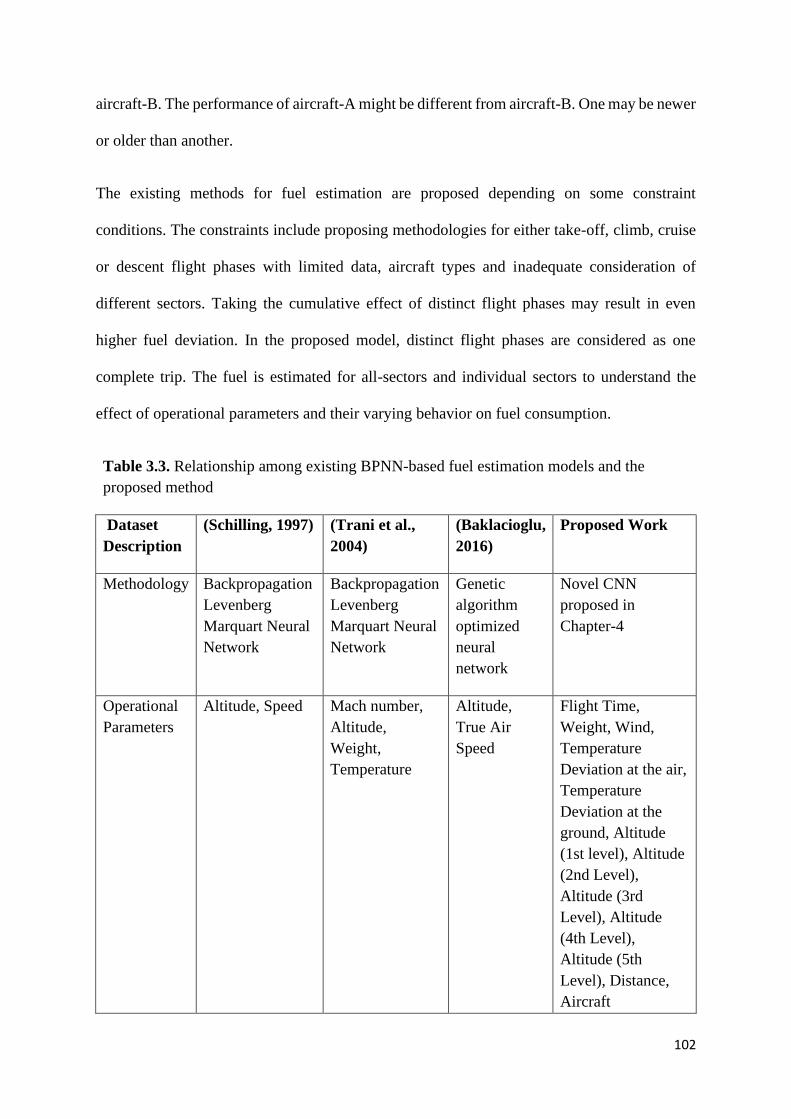
102
aircraft-B. The performance of aircraft-A might be different from aircraft-B. One may be newer
or older than another.
The existing methods for fuel estimation are proposed depending on some constraint
conditions. The constraints include proposing methodologies for either take-off, climb, cruise
or descent flight phases with limited data, aircraft types and inadequate consideration of
different sectors. Taking the cumulative effect of distinct flight phases may result in even
higher fuel deviation. In the proposed model, distinct flight phases are considered as one
complete trip. The fuel is estimated for all-sectors and individual sectors to understand the
effect of operational parameters and their varying behavior on fuel consumption.
Table 3.3. Relationship among existing BPNN-based fuel estimation models and the
proposed method
Dataset
Description
(Schilling, 1997) (Trani et al.,
2004)
(Baklacioglu,
2016)
Proposed Work
Methodology Backpropagation
Levenberg
Marquart Neural
Network
Backpropagation
Levenberg
Marquart Neural
Network
Genetic
algorithm
optimized
neural
network
Novel CNN
proposed in
Chapter-4
Operational
Parameters
Altitude, Speed Mach number,
Altitude,
Weight,
Temperature
Altitude,
True Air
Speed
Flight Time,
Weight, Wind,
Temperature
Deviation at the air,
Temperature
Deviation at the
ground, Altitude
(1st level), Altitude
(2nd Level),
Altitude (3rd
Level), Altitude
(4th Level),
Altitude (5th
Level), Distance,
Aircraft
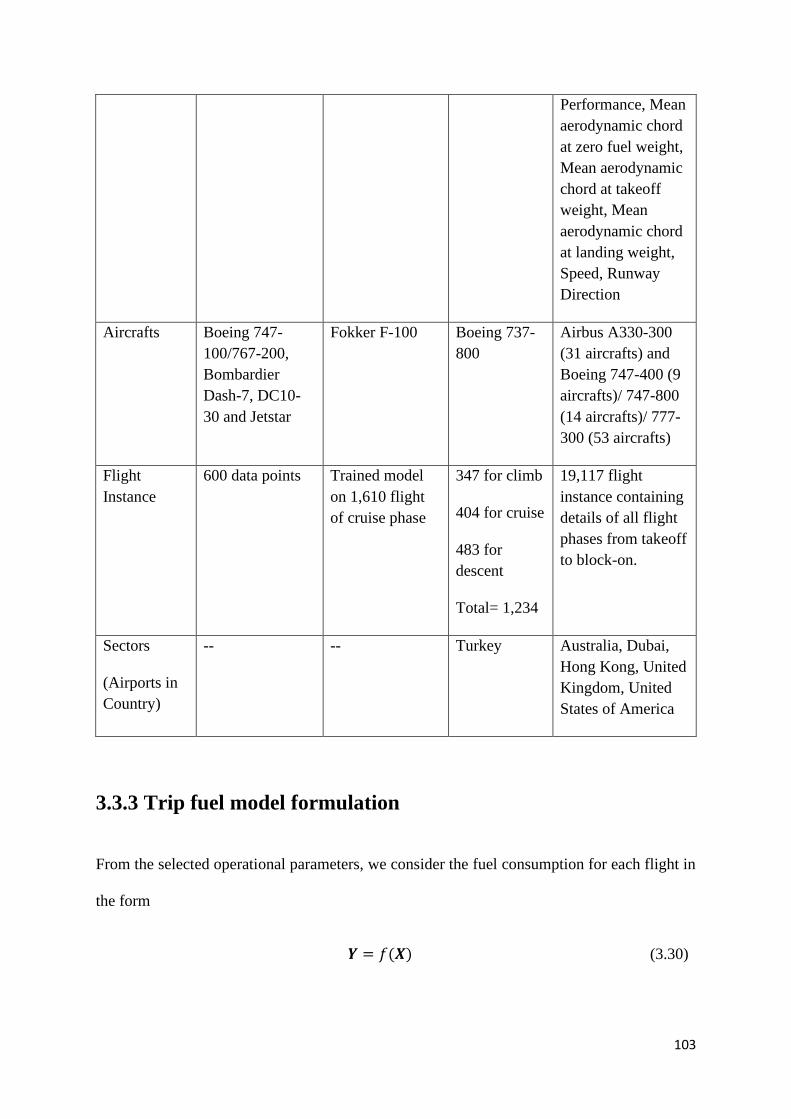
103
Performance, Mean
aerodynamic chord
at zero fuel weight,
Mean aerodynamic
chord at takeoff
weight, Mean
aerodynamic chord
at landing weight,
Speed, Runway
Direction
Aircrafts Boeing 747-
100/767-200,
Bombardier
Dash-7, DC10-
30 and Jetstar
Fokker F-100 Boeing 737-
800
Airbus A330-300
(31 aircrafts) and
Boeing 747-400 (9
aircrafts)/ 747-800
(14 aircrafts)/ 777-
300 (53 aircrafts)
Flight
Instance
600 data points Trained model
on 1,610 flight
of cruise phase
347 for climb
404 for cruise
483 for
descent
Total= 1,234
19,117 flight
instance containing
details of all flight
phases from takeoff
to block-on.
Sectors
(Airports in
Country)
-- -- Turkey Australia, Dubai,
Hong Kong, United
Kingdom, United
States of America
3.3.3 Trip fuel model formulation
From the selected operational parameters, we consider the fuel consumption for each flight in
the form
𝒀 = 𝑓(𝑿) (3.30)
104
𝒀 = 𝑓(𝑡,𝑚,𝑤, 𝑡𝑒𝑚𝑝𝑎, 𝑡𝑒𝑚𝑝𝑔, ℎ𝑙1, ℎ𝑙2, ℎ𝑙3, ℎ𝑙4, ℎ𝑙5,
𝑑, 𝑝𝑒𝑟𝑓𝑎𝑐, 𝑚𝑎𝑐𝑧𝑓𝑤,𝑚𝑎𝑐𝑡𝑜𝑤, 𝑚𝑎𝑐𝑙𝑎𝑤, 𝑣, 𝑟𝑤𝑦)
(3.31)
The objective function is
𝑅𝑀𝑆𝐸 = √1
𝑚∑(�̂�𝑖 − 𝒀𝑖)
2𝑚
𝑖=1
(3.32)
or
𝑀𝐴𝑃𝐸 =100%
𝑚∑|
�̂�𝑖 − 𝒀𝑖𝒀𝑖
|
𝑚
𝑖=1
(3.33)
such that
�̂� = (∅(𝑿𝑾𝒊𝒄𝒘 + 𝑏))𝑾𝒐𝒄𝒘 + 𝜀 (3.34)
∅(𝑧) =1
1 + 𝑒−𝑧 (3.35)
where
𝒀: Output target variable representing actual consumed fuel after
flight operation in Kilogram (Kg)
𝑿: Input variables with m-rows representing flight instances and n-
columns representing operational parameters
𝑡: Flight time duration from takeoff to landing in minutes (min)
105
𝑚: Ramp weight including aircraft, passengers, crew, and usable and
unusable fuel weight in Kilogram (Kg)
𝑤: Wind speed (a negative value means headwind whereas a
positive value means tailwind) in Knots (kt)
𝑡𝑒𝑚𝑝𝑎: Temperature deviation at the air in degree Celsius (oC)
𝑡𝑒𝑚𝑝𝑔: Temperature deviation at the ground in degree Celsius (oC)
ℎ𝑙1: Cruise altitude level 1 in hectofeet (hft)
ℎ𝑙2: Cruise altitude level 2 in hectofeet (hft)
ℎ𝑙3: Cruise altitude level 3 in hectofeet (hft)
ℎ𝑙4: Cruise altitude level 4 in hectofeet (hft)
ℎ𝑙5: Cruise altitude level 5 in hectofeet (hft)
𝑑: Travel distance in nautical miles (NM)
𝑝𝑒𝑟𝑓𝑎𝑐: Performance of aircraft engine (% compared to a new model
aircraft)
𝑚𝑎𝑐𝑧𝑓𝑤: Mean aerodynamic chord at zero fuel weight (%)
𝑚𝑎𝑐𝑡𝑜𝑤: Mean aerodynamic chord at takeoff weight (%)
𝑚𝑎𝑐𝑙𝑎𝑤: Mean aerodynamic chord at landing weight (%)
𝑣: Speed of aircraft in cost index (CI)
106
𝑟𝑤𝑦: Runway direction (a number between 01 and 36, which is
generally the magnetic azimuth of the runway's heading in
decadegrees)
�̂�: Fuel estimated for flight in Kilogram (Kg)
𝑾𝒊𝒄𝒘: Input connection weights connecting input units (operational
parameters) to hidden units
𝑏: Bias for hidden units (+1 value)
𝑾𝒐𝒄𝒘: Output connection weight connecting hidden units to the output
unit (fuel estimation)
∅: Nonlinear sigmoid activation function
𝜀: Predefined target error
𝑅𝑀𝑆𝐸: Root mean square error between estimated fuel and actual
consumed fuel (Kg)
𝑀𝐴𝑃𝐸: Mean absolute percent error between estimated fuel and actual
consumed fuel (%)
𝑆𝑅𝐻𝑈𝑆𝐼: Sector route from departure airport-one at the United States of
America and arrival airport at Hong Kong
𝑆𝑅𝐻𝐷: Sector route from departure airport at Dubai and arrival airport at
Hong Kong
107
𝑆𝑅𝑈𝑆1𝐻 : Sector route from departure airport at Hong Kong and arrival
airport-one at the United States of America
𝑆𝑅𝑈𝑆2𝐻 : Sector route from departure airport at Hong Kong and arrival
airport-two at the United States of America
𝑆𝑅𝑈𝐾𝐻 : Sector route from departure airport at Hong Kong and arrival
airport at the United Kingdom
𝑆𝑅𝐻𝑈𝑆2: Sector route from departure airport-two at United States of
America and arrival airport at Hong Kong
𝑆𝑅𝐻𝑈𝐾: Sector route from departure airport at the United Kingdom and
arrival airport at Hong Kong
𝑆𝑅𝐻𝐴: Sector route from departure airport at Australia and arrival airport
at Hong Kong
The objective functions (3.32) or (3.33) correspond to fuel deviation and their purpose is to
achieve the smallest deviation by estimating a value of �̂� that approximately represents 𝒀. The
RMSE objective function (3.32) measures the performance of the estimation method by
determining the difference between the estimated �̂� and the actual consumed 𝒀. The
measurement scale is identical to that of 𝒀. The RMSE tends to give more importance to a
higher deviation by computing its square error. Actually, this is a more useful metric for
comparison given that a higher deviation is undesirable. The MAPE objective function (3.33)
measures the performance in percentage accuracy by determining the absolute difference
between the estimated �̂� and actual consumed 𝒀. The percentage accuracy helps to make a
more informed decision by comparing the deviation of the estimation methods on an absolute
108
scale. In the NN, the value of �̂�, as shown in Equation (3.34), can be estimated by determining
coefficients of connection weights 𝑾𝒊𝒄𝒘 and 𝑾𝒐𝒄𝒘. Hidden units can be generated in-between
connection weights by using a nonlinear sigmoid activation function ∅ , as shown in Equation
(3.35), to truly approximate 𝒀 from 𝑿.
3.4 Summary
In this chapter, we explained the framework of fuel consumption and its deviation from the
estimation, extracted complex high-level operational parameters that contribute to fuel
estimation and explained their relationship, and formulated a model with an objective function
to minimize a fuel deviation. The trip fuel deviation arises from the overestimation or
underestimation of fuel because of less confidence in existing estimation techniques and
ignoring some of the operational parameters that may contribute to fuel consumption.
Overestimation increases the weight of an aircraft and hence more fuel is needed to balance
thrust and drag. Underestimation may create a safety issue by utilizing some of the fuel reserved
in supplementary reservoirs that may be needed for other purposes or emergency landing.
The two methods used to estimate fuel consumption for aircraft, known as a mathematical
method and data-driven method, are explained. The mathematical methods are helpful in
physical understanding of the system; however, it is equally challenging to practice. It is
difficult to apply because information about aircraft is not always available and needs expert
knowledge. The EA mathematical methods are best suitable for cruise phases and loss accuracy
for the terminal areas. There are separate mathematical equations for estimating fuel
consumption for each distinct flight phase which needed a lot of flight testing to generate
information about parameters. Some of the information about aircraft such as engine design,
wing area, aerodynamic properties, thrust needed, etc and the situation at arrival or departure
109
airport such as atmospheric condition may not be available in a real scenario and need to apply
global parameters with default values rather than local parameters.
Compared to the mathematical method, data-driven methods are generally favorable because
of their ability to learn from historical data. Among various machine learning data-driven
methods, NNs are more popular because of their universal approximation ability. The
prediction performance of BPNNs is highly dependent on the dataset and hyperparameter
initialization and adjustment. This involves human intervention by doing a lot of trial and error
experimental work which makes the training phase a challenging task to accomplish. In some
cases, the use of second-order learning algorithms, which are considered better than first-order
learning algorithms, is selected for training. The second-order learning algorithms are
constraints by memory requirement. This demand for more computational resources when high
dimensional data is available.
Existing work on the application of BPNN to estimate fuel consumption for aircraft is limited
in scope. The work covered the small number of aircraft with limited flight data and operational
parameters with a future recommendation of incorporating high-level operational parameters.
The main reason for this is weak generalization performance and slow convergence of BPNN
with the need for human intervention to decide and adjust hyperparameters.
The limitation needs to be addressed more innovatively by proposing an algorithm that has
cascade architecture and able to calculate connection weights analytically. The cascade
architecture of CNN helps to generate hidden units in hidden layers until error convergence.
This makes it work like deep learning with a less human intervention needed. The objective of
reaching a destination with less fuel deviation is an important research topic to ensure
profitability and safety. A model is formulated, to overcome existing limitations and
complexity, with the objective to minimize fuel deviation by estimating fuel for each flight that

110
may truly approximate actual fuel consumed. The model incorporates extracted operational
parameters to estimate the fuel, and calculate the difference from actual fuel consumed to
measure the fuel deviation.
111
Chapter 4. A Novel Self-Organizing Constructive Neural
Network Algorithm
4.1 Introduction
NNs following the universal approximation theorem may map any complex nonlinear function
more accurately compared to other statistical parametric methods (Ferrari and Stengel, 2005;
Hornik et al., 1989; Kumar et al., 1995). The rapidly growing interest in NNs (Au et al., 2008;
Lin and Vlachos, 2018; Ruiz-Aguilar et al., 2014), and particularly in CNNs (Chung et al.,
2017), motivates the study of their application to the airline sector. CNNs are considered to be
more powerful compared to standard fixed NNs (Hunter et al., 2012; Wilamowski et al., 2008).
The major drawbacks of BPNNs limiting their applicability are their weak generalization
performance and learning speed. The generalization performance is weak in the sense that it
may stop at local minima of the function if global minima are far away. The learning speed
(also known as convergence rate) is slow and dependent on the learning rate and BP learning
algorithms. When the learning rate is small, it converges slowly, and when the learning rate is
large, it becomes unstable. The BP learning can be considered time-consuming because of the
repetitive tuning of the connection weights in forward and backward steps with other
hyperparameters (Huang, Zhu, et al., 2006). This may create a complex co-adaptation among
the parameters and hidden units that demands further attention in regularization (Srivastava et
al., 2014). Moreover, with respect to the drawbacks mentioned above, the human expertise of
defining the structure of the network based on trial and errors significantly affects the
generalization performance and learning speed of BPNNs.
The drawbacks and expertise issues need to be solved in a more innovative way to improve
generalization performance and learning speed. To overcome the above limitations, we propose
112
a self-organizing cascade topology-based CNN capable of analytically calculating connection
weights and requiring less expertise by eliminating the need for complex hyperparameter
initialization and adjustment. The objective is to improve the performance of the estimation
model with less expertise involvement and obtain results with fast learning speed. Inspired
from the gradient-free learning algorithms (Chapter 2, Subsection 2.2.3.2) having the property
of calculating analytically output connection weights and constructive topology FNN (Chapter
2, Subsection 2.2.4.3) have the property of adding hidden units in the hidden layer, this work
proposes new algorithm. The novel algorithm may also assist in overcoming the exiting FNNs
research gaps identified in Chapter 2.
The rest of the Chapter is organized as follows. Section 4.2 discusses CasCor and its extension
with convergence limitations. Section 4.3 briefly explains existing orthogonal linear
transformation and ordinary least squares methodologies. In Section 4.4, we propose a novel
CNN. Section 4.5 is about experimental work to demonstrate the performance of proposed
CNN on artificial and real-world problems. Section 4.6 summarizes the chapter.
4.2 Convergence limitations of CasCor and its extensions
To address the learning issues of BPNNs, the so-called cascade correlation learning algorithm
(CasCor) was proposed to add hidden units sequentially to the network (Fahlman and Lebiere,
1990). CasCor begins with the minimal network by linearly connecting 𝑿 to 𝒀 through
randomly generated 𝑾𝒐𝒄𝒘. The values of 𝑾𝒐𝒄𝒘 are iteratively tuned (or trained) by the QP
learning algorithm to minimize 𝐸. When training converges and 𝐸 is greater than 𝜀, it adds
𝑯𝒌 (𝑘 = 1,2, … . , 𝑙) one at a time to the network, which receives randomly generated 𝑾𝒊𝒄𝒘
from all 𝑿 and any pre-existing 𝑯𝒌−𝟏. The 𝑯𝒌 is not yet connected to 𝒀. The values of 𝑾𝒊𝒄𝒘
are iteratively tuned to maximize the covariance objective function between 𝑯𝒌 and 𝐸. When
113
the covariance objective function converges, 𝑯𝒌 is added to 𝒀 by freezing 𝑾𝒊𝒄𝒘, and 𝑾𝒐𝒄𝒘 is
once again iteratively tuned by QP. This process continues and finally stops when 𝐸 converges
or starts increasing. The QP quickly reaches the loss function by taking a much larger step
rather than infinitesimal steps (Fahlman, 1988). The advantage of CasCor over fixed-topology
BPNNs is that it can learn complex tasks more quickly as well as determine its own network
topology. In addition, it is economical and has no underfitting issue. The network of CasCor is
illustrated in Figure 4.1.
The growing applications of CNN-based algorithms concluded that CasCor learning speed is
better than that of BPNNs, but its generalization performance might be not optimal. Hwang et
al. (1996) and Lehtokangas (2000) highlighted that CasCor works better with classification
tasks compared to regression tasks and this may make it unsuitable for some applications. Liang
and Dai (1998) made an effort to improve the generalization performance of CasCor on
classification problems by using a genetic algorithm, at the additional cost of requiring more
training time. Kovalishyn et al. (1998) studied the application of CasCor on the quantitative
structural activity relationship and did not achieve any dramatic increase in performance
compared to BPNNs. The reasons may be (i) the chaotic behavior and numerical instability of
the iterative QP learning algorithm and (ii) no guarantee of maximum error reduction by the
covariance objective function when a new hidden unit is added.
Firstly, QP during iterative tuning takes a much larger step to move towards the loss function
based on information of past and current gradient. If the current gradient is in the opposite
direction from the past gradient, the QP may cross the minimum of the loss function and moves
towards the opposite direction of the valley, from where it needs to come back (Fahlman, 1988).
This may cause the QP to act chaotically across the minimum valley of the loss function.
Banerjee et al. (2011) explained that QP becomes numerically unstable if the current iteration
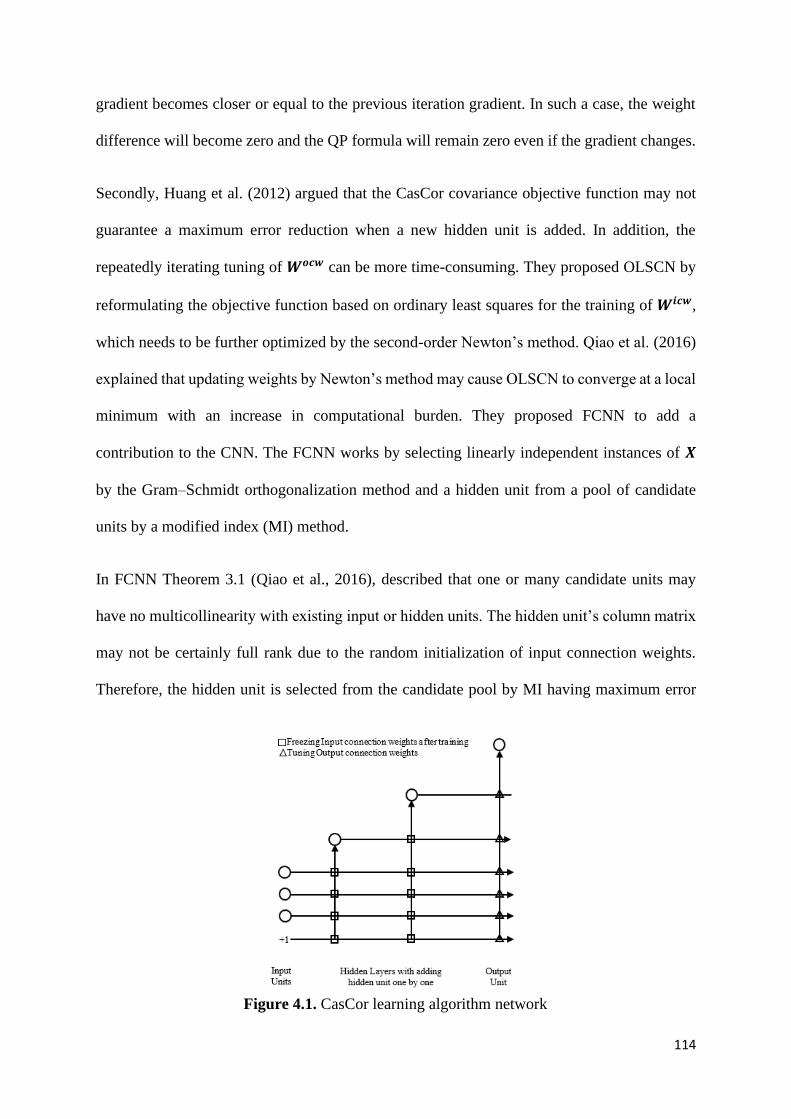
114
gradient becomes closer or equal to the previous iteration gradient. In such a case, the weight
difference will become zero and the QP formula will remain zero even if the gradient changes.
Secondly, Huang et al. (2012) argued that the CasCor covariance objective function may not
guarantee a maximum error reduction when a new hidden unit is added. In addition, the
repeatedly iterating tuning of 𝑾𝒐𝒄𝒘 can be more time-consuming. They proposed OLSCN by
reformulating the objective function based on ordinary least squares for the training of 𝑾𝒊𝒄𝒘,
which needs to be further optimized by the second-order Newton’s method. Qiao et al. (2016)
explained that updating weights by Newton’s method may cause OLSCN to converge at a local
minimum with an increase in computational burden. They proposed FCNN to add a
contribution to the CNN. The FCNN works by selecting linearly independent instances of 𝑿
by the Gram–Schmidt orthogonalization method and a hidden unit from a pool of candidate
units by a modified index (MI) method.
In FCNN Theorem 3.1 (Qiao et al., 2016), described that one or many candidate units may
have no multicollinearity with existing input or hidden units. The hidden unit’s column matrix
may not be certainly full rank due to the random initialization of input connection weights.
Therefore, the hidden unit is selected from the candidate pool by MI having maximum error
Figure 4.1. CasCor learning algorithm network
115
reduction capability among the existing pool. This makes sure that the selected hidden unit
from the pool will have maximum error reduction capability in the existing pool, however,
network best error reduction cannot be guaranteed. Firstly, if in the existing pool, some of the
candidate units get linearly dependent than the selection of the best hidden unit by MI also
declines. Secondly, the hidden unit generated in the existing hidden layer may do not guarantee
that the next hidden unit generation will contribute to more error reduction. These drawbacks
may result in the generation of redundant hidden units in the network causing suboptimal
performance. Experimental work (Qiao et al., 2016) having Figure 9 explains the same problem
of not achieving smooth convergence upon the addition of hidden units. The objective of
achieving smooth and better convergence at each subsequent hidden layer is not achieved. To
add a contribution and overcome above discussed limitations of CasCor and its extension, we
propose to generate linearly independent hidden units and calculate all connection weights
analytically rather than the random generation or gradient iterative tuning.
4.3 Orthogonal linear transformation and ordinary least
squares
This section explains two existing methodologies that will assist in calculating analytically the
connection weights for the proposed algorithm. The generated hidden units must be linearly
independent of each other to ensure better convergence.
The orthogonal linear transformation (OLT) method is helpful in linearly transforming one
variable into another variable orthogonally (Jolliffe, 2002). This can be achieved by the
eigendecomposition of the symmetric matrix by calculating the eigenvalue and the
corresponding eigenvector. Suppose 𝑿 be m×n, 𝒀 be m×q, 𝑯 be m×r, 𝑾𝒊𝒄𝒘 be n×r, and 𝑾𝒐𝒄𝒘
be r×q matrices. Initially, OLT determines the covariance 𝑪 symmetric matrix with a number
116
other than diagonal represents the covariance among n-features of variable 𝑿. The
eigendecomposition of 𝑪 generates eigenvalues λ. The largest λ explaining maximum
variability in the datasets are selected and corresponding eigenvectors are calculated. The
calculated 𝑾𝒊𝒄𝒘 linearly transform 𝑿 to a new variable named as hidden unit 𝑯. The new
variable 𝑯 is generated from 𝑿, therefore, 𝑯 dimension will be always less than or equal to 𝑿
i.e. 𝑟 ≤ 𝑛.
Ordinary least squares (OLS) minimizes the error between actual and predicted variables. The
unknown parameter 𝑾𝒐𝒄𝒘 is determined by taking Moore Penrose pseudo-inverse of matrix 𝑯
and taking the product with 𝒀 (Goldberger, 1964). Finally, the �̂� is estimated by taking the
product of 𝑯 and 𝑾𝒐𝒄𝒘. The calculated �̂� is compared with 𝒀 to calculate the error.
Calculating connection weights 𝑾𝒊𝒄𝒘 and 𝑾𝒐𝒄𝒘 analytically may facilitate in generating and
connecting hidden units to an output unit that is linearly independent ensuring smooth and
better convergence. The concept of OLT and OLS may facilitate in calculating analytically
connection weights for the proposed algorithm, and further improvement in cascade
architecture of the existing CasCor and its extensions may result in better convergence.
4.4 Cascade principal component least squares neural network
Motivated by the cascade architecture of CasCor, we propose a new CNN by improving the
original CasCor and its extensions. The key idea is to analytically determine connection
weights on both sides of the network rather than iterative tuning or random generation with
modified cascade architecture. We propose to analytically determine 𝑾𝒊𝒄𝒘 by the OLT of 𝑿,
whereas 𝑾𝒐𝒄𝒘 by the OLS method. The proposed CNN algorithm is named the cascade
principal component least squares (CPCLS) neural network.
117
In the following subsections, lemma and supporting statements with remarks are discussed.
The remarks generated from lemma and statement will facilitate in designing an efficient
algorithm that has the property of calculating connection weights analytically to obtain the best
least-squares solution from linearly independent hidden units.
4.4.1 Lemma and statement
Lemma 1: Given a standard SLFN with 𝑁 hidden nodes and activation function 𝑔: 𝑅 → 𝑅,
which is infinitely differentiable in any interval, for 𝑁 arbitrary distinct samples (xi, yi), where
xiϵ 𝐑𝐧 and 𝑦iϵ 𝐑𝐦, for any 𝑤𝑖𝑖𝑐𝑤 and 𝑏𝑖 randomly chosen from any intervals of 𝐑𝐧 and 𝐑,
respectively, according to any continuous probability distribution, then with probability one,
the hidden layer output matrix 𝑯 of the SLFN is invertible and ||𝑯𝑾𝒐𝒄𝒘 − 𝒀|| = 𝟎 (Huang,
Zhu, et al., 2006).
Remark 1: Lemma 1 suggests that generated hidden units in a layer must be invertible (linearly
independent) to each other to obtain better convergence.
Statement 1: The orthogonal linear transformation of variables into linearly independent
variables can be achieved by calculating eigenvalue and eigenvector from the
eigendecomposition of the symmetric matrix (Jolliffe, 2002).
Remark 2: Statement 1 confirms that new variables generated will be always linearly
independent of each other.
4.4.2 Analytically determining hidden units input connection
weights

118
The architecture of CPCLS is illustrated in Figure. 4.2. Given 𝑿 and 𝒀, CPCLS is initialized
by defining 𝜀 and hidden units 𝑁 of 𝑯 such that 𝑟 ≤ 𝑛 . For input connection weight 𝑾𝒊𝒄𝒘
determination, it transforms the set of correlated 𝑿 n-features orthogonally and linearly into
uncorrelated 𝑯 r-features by eigendecomposition of the 𝑿 covariance square n×n matrix 𝑪:
𝑪 =1
𝑚 − 1(𝑿 − �̅�)𝑇(𝑿 − �̅�) (4.1)
�̅� =1
𝑚∑ 𝑥𝑖
𝑚
𝑖=1
(4.2)
The highest eigenvalue λ generated from 𝑪 corresponds to an eigenvector. These selected 𝑁
eigenvectors are considered as the input connection weight, i.e., 𝑾𝒊𝒄𝒘:
|𝑪 − λ𝑰| = 0 (4.3)
(𝑪 − λ𝑰)𝑾𝒊𝒄𝒘 = 0 (4.4)
We calculate 𝑯 by taking the nonlinear activation ∅ from the product of 𝑿 and 𝑾𝒊𝒄𝒘 by adding
a bias 𝑏:
Figure 4.2. CPCLS learning algorithm network
119
𝑯 = ∅(𝑿𝑾𝒊𝒄𝒘 + 𝑏) (4.5)
The orthogonal linear transformation by eigendecomposition of 𝑪 generates 𝑯, which explains
the maximum variance in the data, which in turn can help to estimate trip fuel more accurately.
4.4.3 Analytically determining hidden units output connection
weights
The maximum variance in 𝑯 becomes more linear in a relationship with 𝒀, and the sum of
squared errors can be minimized through OLS by calculating for output connection weight, i.e.,
𝑾𝒐𝒄𝒘:
𝑾𝒐𝒄𝒘 = (𝑯𝑻𝑯)−𝟏𝑯𝑻𝒀 (4.6)
where (𝑯𝑻𝑯)−𝟏𝑯𝑻 is the Moore-Penrose pseudo-inverse of 𝑯. We estimate the trip fuel �̂� by
linearly transferring 𝑯 (4.5) through 𝑾𝒐𝒄𝒘 (4.6):
�̂� = 𝑯𝑾𝒐𝒄𝒘 (4.7)
We calculate fuel deviation in (3.32) or (3.33) by subtracting the actual consumed fuel 𝒀 from
the estimated trip fuel �̂�.
If (3.32) or (3.33) is less than 𝜀, we stop; otherwise, another hidden layer 𝑯𝒌 with 𝑁′ hidden
units are added with respect to the previously added hidden layer 𝑯𝒌−𝟏 having 𝑁 hidden units
until the desired performance is achieved. The newly added hidden layer 𝑯𝒌 will receive all
the connections from 𝑿 and from any pre-existing hidden layers, i.e., 𝑯𝒌−𝟏. In other words, the
previously calculated 𝑯𝒌−𝟏 becomes a part of 𝑿, such that

120
𝑿 = (𝑿, 𝑯𝒌−𝟏) (4.8)
𝑁 = 𝑁 + 𝑁′ (4.9)
The steps from Equation (4.1) to (4.7) are repeated.
4.4.4 Adding hidden layers
Equation (4.8) implies that only newly added 𝑯𝒌 will connect to 𝒀 and will eliminate previous
connections, i.e., 𝑯𝒌−𝟏, 𝑯𝒌−𝟐, etc. This helps to avoid linear dependencies among hidden units
in the multiple hidden layers. For better illustration, consider an example in Figure 4.2, where
the hidden layers are initialized with 𝑁=2 and 𝑁′=2. It implies that the first hidden layer (hidden
layer 1) is initialized with 𝑁=2 hidden units and the algorithm is then trained. If the error
resulting from training is larger than 𝜀, then another hidden layer (hidden layer 2) is added with
𝑁′=2 hidden units with respect to hidden units of previous layers (𝑁 = 𝑁 + 𝑁′ = 2+2= 4 hidden
units in the hidden layer 2). Again, the algorithm is trained, and the error is calculated by
connecting only a newly added hidden layer (hidden layer 2) to the output unit and by
eliminating a previous hidden layer (hidden layer 1) from the output connections weight. These
steps continue until the targeted value of 𝜀 is achieved.
4.4.5 Hyperparameters
The advantages of CPCLS that makes it superior compared to CasCor and its extensions is the
generation of non-redundant and linearly independent multiple hidden units in the layers. The
linearly independent hidden units generated by an OLT of the operational parameters help to
achieve the best least squares solution. Similarly, to avoid the linear dependency among hidden
layers, a cascade architecture is improved by connecting only the newly added hidden layer to
the output, with all previous connections being eliminated. Besides, the input units are
121
connected to the output unit through hidden units to avoid the input unit’s linear dependency.
Multiple hidden units can be generated in hidden layers to converge faster. These
characteristics help CPCLS to converge faster and ensure maximum error reduction when the
new hidden layer is added. However, the problem of overfitting and slow convergence should
be avoided while generating multiple hidden units. To further elaborate the overfitting and
convergence complexity issues of the algorithm, experimental work in Subsection 4.5.3 is
performed to study the effect of hidden unit generation on network performance. The
achievement of estimation results in the shortest possible computational time along with
minimum hyperparameter initialization, such as 𝑯 and 𝜀, makes CPCLS more favorable. Other
properties include no iterative tuning, no random generation, no trial-and-error to find the best
hyperparameters, and less human intervention.
4.4.6 Convergence theoretical justification
CPCLS proposed to connect only a new added hidden layer to the output unit and eliminate
previous connections to avoid linear dependence among hidden layers. In this Subsection, we
theoretical justified that adding only the newly added layer contributes to error convergence. If
all hidden layers are connected to the output unit then it will create an extra burden on the
network. Besides, if there exists linear dependence among hidden units in hidden layers that
will cause low performance of the network.
Suppose two eigenvectors 𝑤1𝑖𝑐𝑤 and 𝑤2
𝑖𝑐𝑤 are generated from the eigendecomposition of 𝑪.
Both vectors can be considered orthogonal if and only if the inner product is zero, i.e.,
𝑤1𝑖𝑐𝑤. 𝑤2
𝑖𝑐𝑤 = 0 or 𝑤1𝑖𝑐𝑤𝑇
𝑤2𝑖𝑐𝑤 = 0. Where 𝑇 in superscript is the transpose of a matrix.
We have:

122
𝑪𝑤1𝑖𝑐𝑤 = 𝜆1𝑤1
𝑖𝑐𝑤 (4.10)
and
𝑪𝑤2𝑖𝑐𝑤 = 𝜆2𝑤2
𝑖𝑐𝑤 (4.11)
To prove that 𝑤1 and 𝑤2 are orthogonal:
𝜆1(𝑤1𝑖𝑐𝑤. 𝑤2
𝑖𝑐𝑤)
= (𝜆1𝑤1𝑖𝑐𝑤). 𝑤2
𝑖𝑐𝑤
= (𝑪𝑤1𝑖𝑐𝑤). 𝑤2
𝑖𝑐𝑤
= (𝑪𝑤1𝑖𝑐𝑤) 𝑇𝑤2
𝑖𝑐𝑤
= 𝑤1𝑖𝑐𝑤𝑇
𝑪𝑇𝑤2𝑖𝑐𝑤
= 𝑤1𝑖𝑐𝑤𝑇
𝑪𝑤2𝑖𝑐𝑤
= 𝑤1𝑖𝑐𝑤𝑇
𝜆2𝑤2𝑖𝑐𝑤
= 𝜆2(𝑤1𝑖𝑐𝑤𝑇
𝑤2𝑖𝑐𝑤)
= 𝜆2(𝑤1𝑖𝑐𝑤. 𝑤2
𝑖𝑐𝑤) (4.12)
𝑪 = 𝑪𝑻 because 𝑪 is a symmetric matrix. From mathematical work, we have:
𝜆1(𝑤1𝑖𝑐𝑤. 𝑤2
𝑖𝑐𝑤) = 𝜆2(𝑤1𝑖𝑐𝑤. 𝑤2
𝑖𝑐𝑤) (4.13)
(𝜆1 − 𝜆2)(𝑤1𝑖𝑐𝑤. 𝑤2
𝑖𝑐𝑤) = 0 (4.14)
Since 𝜆1 − 𝜆2 ≠ 0, because both are different. So, we have:
123
𝑤1𝑖𝑐𝑤. 𝑤2
𝑖𝑐𝑤 = 0 (4.15)
Equation (4.15) implies that 𝑤1𝑖𝑐𝑤 and 𝑤2
𝑖𝑐𝑤 are orthogonal and linearly independent in
eigenmatrix 𝑾𝒊𝒄𝒘. Suppose if two hidden units ℎ𝑘1 and ℎ𝑘2
are generated from 𝑤1𝑖𝑐𝑤 and 𝑤2
𝑖𝑐𝑤
in the first hidden layer, that will be also orthogonal, i.e., ℎ𝑘1⊥ ℎ𝑘2
. This theoretical
justification supports Lemma 1, that generated hidden units in the layer are linearly
independent (inevitable) and hence ||𝑯𝑾𝒐𝒄𝒘 − 𝒀|| = 𝟎 ensuring convergence of the network.
Now, suppose if more than one hidden layer is added in the network. If ℎ𝑘−11 and ℎ𝑘−12
are
generated in 𝑯𝒌−𝟏 by 𝑤𝑘−1𝑖𝑐𝑤
1 and 𝑤𝑘−1
𝑖𝑐𝑤2, and ℎ𝑘1
and ℎ𝑘2 are generated in 𝑯𝒌 by 𝑤𝑘
𝑖𝑐𝑤1 and
𝑤𝑘𝑖𝑐𝑤
2, then equal chance exists that it may or may not be linearly independent. i.e., 𝑯𝒌−𝟏 ⊥
𝑯𝒌 or 𝑯𝒌−𝟏 ⟂̸𝑯𝒌. In 𝑯𝒌−𝟏 ⟂̸𝑯𝒌 case, it may be not orthogonal and may not support lemma 1
and hence ||𝑯𝑾𝒐𝒄𝒘 − 𝒀|| ≠ 𝟎
Algorithm 4.1. CPCLS algorithm summary
In a training dataset (𝑿, 𝒀), let 𝑿 be input variable matrix m×n, 𝒀 be output variable m×q
matrix.
1. Initialize the network by defining number 𝑁 of hidden units in the first hidden layer
such that the number of hidden units less than or equal to input variable, i.e., r ≤ n.
2. Learn the network by defining the criteria of convergence error 𝜀. Compare 𝜀 with
network estimated error 𝐸:
While 𝐸 > 𝜀
a. Input connection weights 𝑾𝒊𝒄𝒘: Determine eigenvectors 𝑾𝒊𝒄𝒘 from the orthogonal
linear transformation of 𝑿. Calculate symmetric matrix 𝑪 and perform its

124
eigendecomposition. The extracted eigenvalue and its corresponding eigenvector are
selected as 𝑾𝒊𝒄𝒘 of matrix n×r:
𝑪 =1
𝑚 − 1(𝑿 − �̅�)𝑇(𝑿 − �̅�)
|𝑪 − λ𝑰| = 0
(𝑪 − λ𝑰)𝑾𝒊𝒄𝒘 = 0
b. Hidden units 𝑯: Generate a linearly independent 𝑯 of matrix m×r by passing the net
of 𝑿 and 𝑾𝒊𝒄𝒘 through activation function ∅:
𝑯 = ∅(𝑿𝑾𝒊𝒄𝒘)
c. Output connection weights 𝑾𝒐𝒄𝒘: Calculate the pseudo-inverse of 𝑯 and take the
product with 𝒀 to determine 𝑾𝒐𝒄𝒘 matrix of r×q:
𝑾𝒐𝒄𝒘 = (𝑯𝑻𝑯)−𝟏𝑯𝑻𝒀
d. Predicted output �̂�: Take the product of calculated 𝑯 and 𝑾𝒐𝒄𝒘 to estimate the
output:
�̂� = 𝑯𝑾𝒐𝒄𝒘
e. Network Error 𝐸: Take the difference between the �̂� and the 𝒀:
𝐸 = (�̂� − 𝒀)2
f. Column stack 𝑯 with 𝑿:
𝑿 = (𝑿, 𝑯)
125
g. Calculate 𝑁 for the proceeding 𝑯 by defining and adding 𝑁′ to existing 𝑁 such that p
≤ n:
𝑁 = 𝑁 + 𝑁′
end
4.5 Experimental work
The generalization performance and learning speed of the proposed algorithm CPCLS are
compared with the traditional algorithms on artificial benchmarking and real-world dataset
problems. The artificial benchmarking problems include the two-spiral classification task and
the function approximation of the SinC regression task. For comparison of real-world
problems, the classification and regression dataset problems are taken from the UCI machine
learning repository. The numerical work was carried out in Netmaker v0.9.5.2 and Anaconda
Spyder Python v3.2.6. Netmaker is a powerful simulation software designed in C programming
for building neural networks and has a built-in QP CasCor programming code. CPCLS, BPNN,
and SaELM simulation were carried out in Python, whereas, CasCor simulation was carried
out in the Netmaker. The limitation of this research work is that the CasCor programming code
is designed in the C programming language. Generally speaking, simulation in different
programming codes will not imitate the comparison because C programming execution is faster
than python. The dataset input and output has been normalized in the range [0,1] to make it
compatible with the sigmoid nonlinear activation function ∅(𝑧) = 1/(1 + 𝑒−𝑧) used in the
hidden units.
The work is divided into two parts: artificial benchmarking problems and real-world problems.
In artificial benchmarking problems, CPCLS is compared with CasCor on two spiral
classifications and the SinC function regression task. A comparison with two spiral
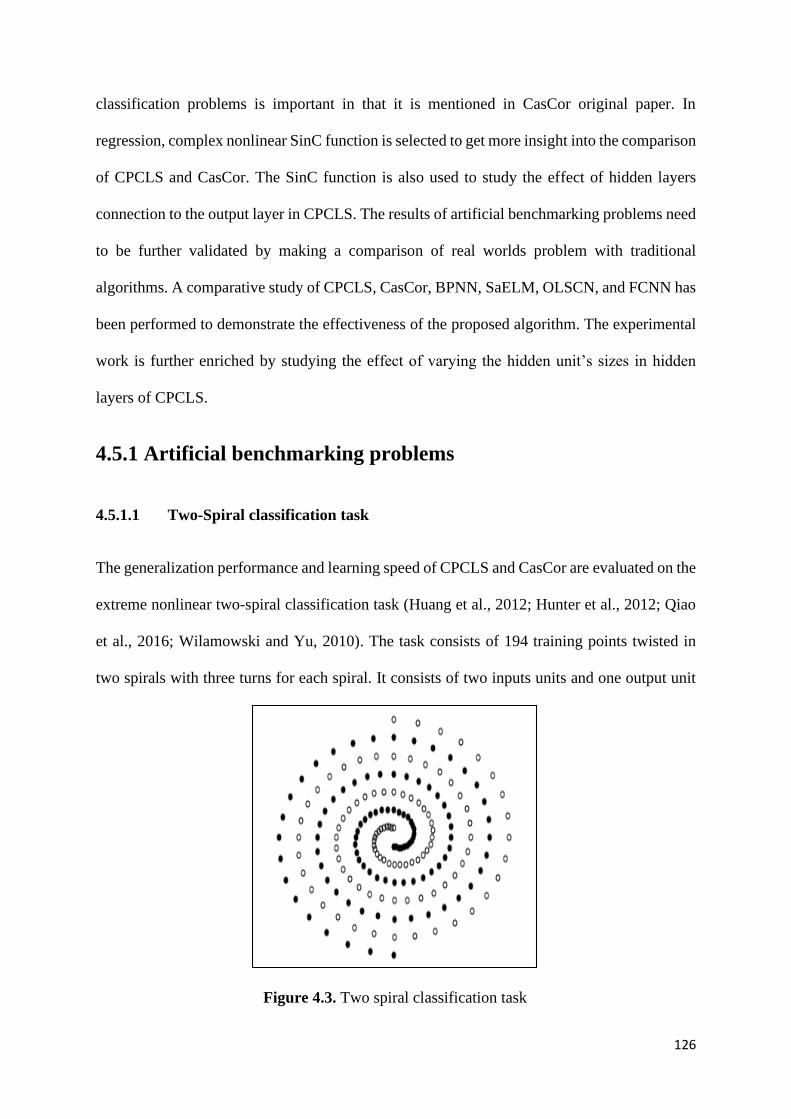
126
classification problems is important in that it is mentioned in CasCor original paper. In
regression, complex nonlinear SinC function is selected to get more insight into the comparison
of CPCLS and CasCor. The SinC function is also used to study the effect of hidden layers
connection to the output layer in CPCLS. The results of artificial benchmarking problems need
to be further validated by making a comparison of real worlds problem with traditional
algorithms. A comparative study of CPCLS, CasCor, BPNN, SaELM, OLSCN, and FCNN has
been performed to demonstrate the effectiveness of the proposed algorithm. The experimental
work is further enriched by studying the effect of varying the hidden unit’s sizes in hidden
layers of CPCLS.
4.5.1 Artificial benchmarking problems
4.5.1.1 Two-Spiral classification task
The generalization performance and learning speed of CPCLS and CasCor are evaluated on the
extreme nonlinear two-spiral classification task (Huang et al., 2012; Hunter et al., 2012; Qiao
et al., 2016; Wilamowski and Yu, 2010). The task consists of 194 training points twisted in
two spirals with three turns for each spiral. It consists of two inputs units and one output unit
Figure 4.3. Two spiral classification task
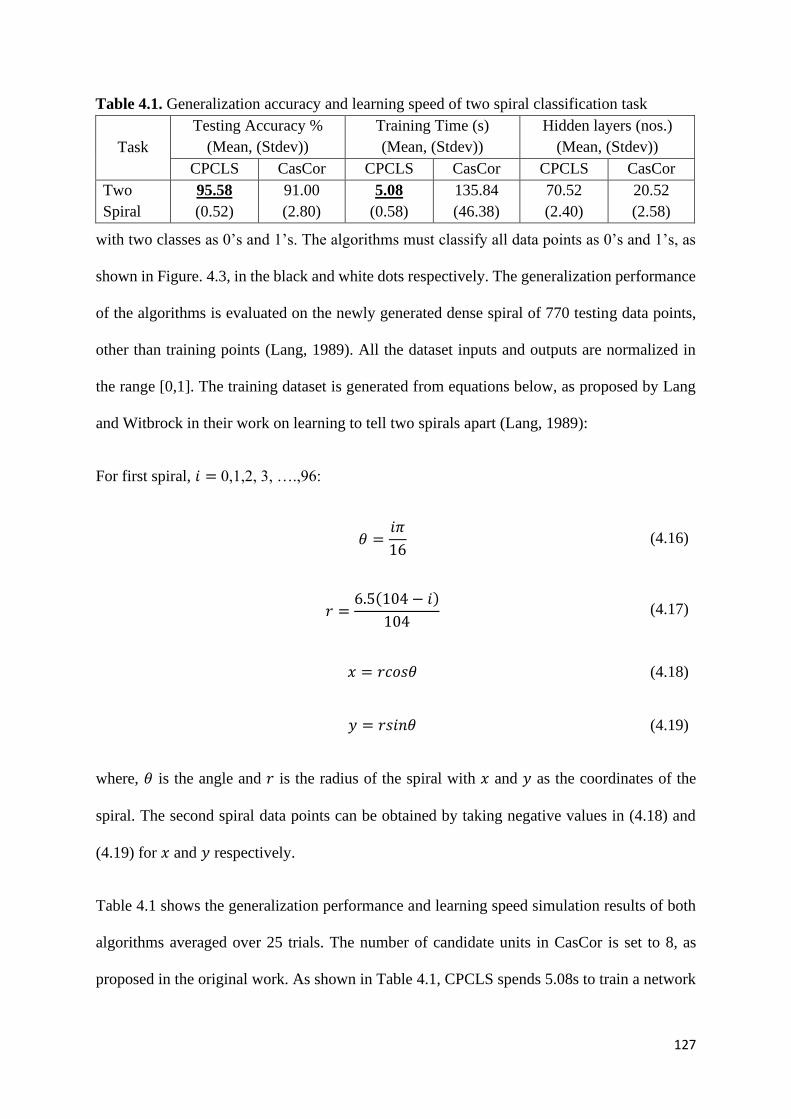
127
with two classes as 0’s and 1’s. The algorithms must classify all data points as 0’s and 1’s, as
shown in Figure. 4.3, in the black and white dots respectively. The generalization performance
of the algorithms is evaluated on the newly generated dense spiral of 770 testing data points,
other than training points (Lang, 1989). All the dataset inputs and outputs are normalized in
the range [0,1]. The training dataset is generated from equations below, as proposed by Lang
and Witbrock in their work on learning to tell two spirals apart (Lang, 1989):
For first spiral, 𝑖 = 0,1,2, 3, ….,96:
𝜃 =𝑖𝜋
16 (4.16)
𝑟 =6.5(104 − 𝑖)
104 (4.17)
𝑥 = 𝑟𝑐𝑜𝑠𝜃 (4.18)
𝑦 = 𝑟𝑠𝑖𝑛𝜃 (4.19)
where, 𝜃 is the angle and 𝑟 is the radius of the spiral with 𝑥 and 𝑦 as the coordinates of the
spiral. The second spiral data points can be obtained by taking negative values in (4.18) and
(4.19) for 𝑥 and 𝑦 respectively.
Table 4.1 shows the generalization performance and learning speed simulation results of both
algorithms averaged over 25 trials. The number of candidate units in CasCor is set to 8, as
proposed in the original work. As shown in Table 4.1, CPCLS spends 5.08s to train a network
Table 4.1. Generalization accuracy and learning speed of two spiral classification task
Task
Testing Accuracy %
(Mean, (Stdev))
Training Time (s)
(Mean, (Stdev))
Hidden layers (nos.)
(Mean, (Stdev))
CPCLS CasCor CPCLS CasCor CPCLS CasCor
Two
Spiral
95.58
(0.52)
91.00
(2.80)
5.08
(0.58)
135.84
(46.38)
70.52
(2.40)
20.52
(2.58)
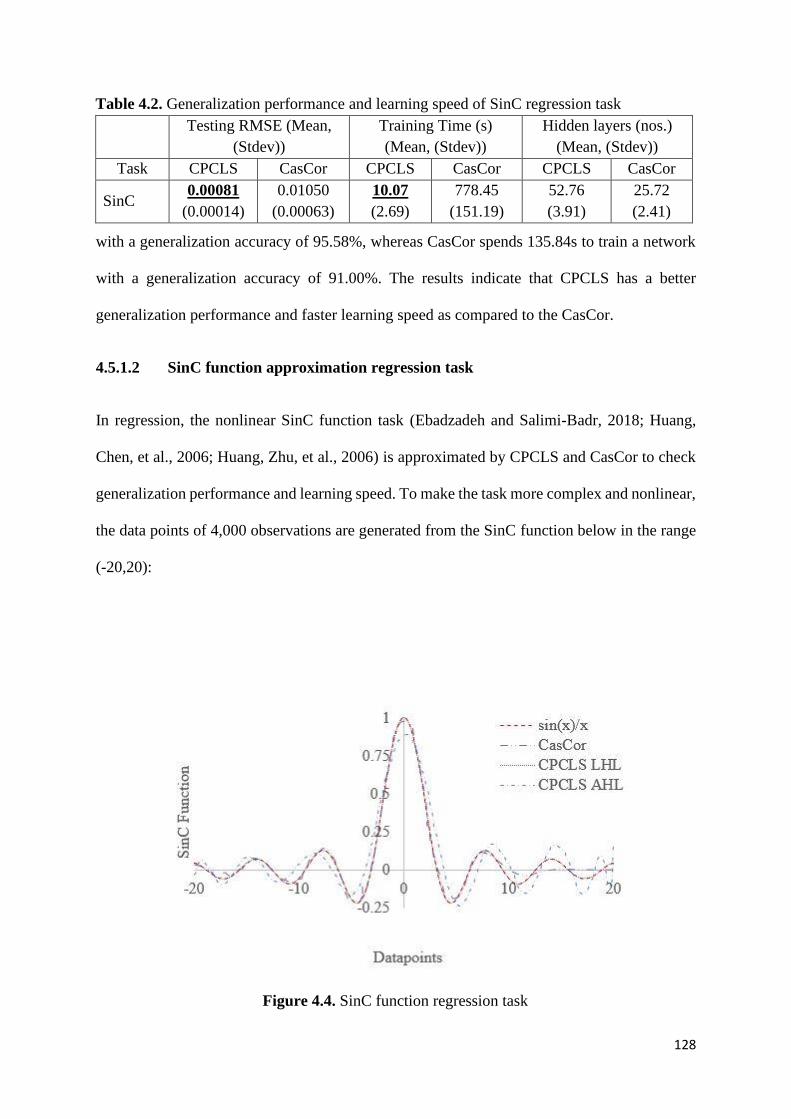
128
with a generalization accuracy of 95.58%, whereas CasCor spends 135.84s to train a network
with a generalization accuracy of 91.00%. The results indicate that CPCLS has a better
generalization performance and faster learning speed as compared to the CasCor.
4.5.1.2 SinC function approximation regression task
In regression, the nonlinear SinC function task (Ebadzadeh and Salimi-Badr, 2018; Huang,
Chen, et al., 2006; Huang, Zhu, et al., 2006) is approximated by CPCLS and CasCor to check
generalization performance and learning speed. To make the task more complex and nonlinear,
the data points of 4,000 observations are generated from the SinC function below in the range
(-20,20):
Figure 4.4. SinC function regression task
Table 4.2. Generalization performance and learning speed of SinC regression task
Testing RMSE (Mean,
(Stdev))
Training Time (s)
(Mean, (Stdev))
Hidden layers (nos.)
(Mean, (Stdev))
Task CPCLS CasCor CPCLS CasCor CPCLS CasCor
SinC 0.00081
(0.00014)
0.01050
(0.00063)
10.07
(2.69)
778.45
(151.19)
52.76
(3.91)
25.72
(2.41)
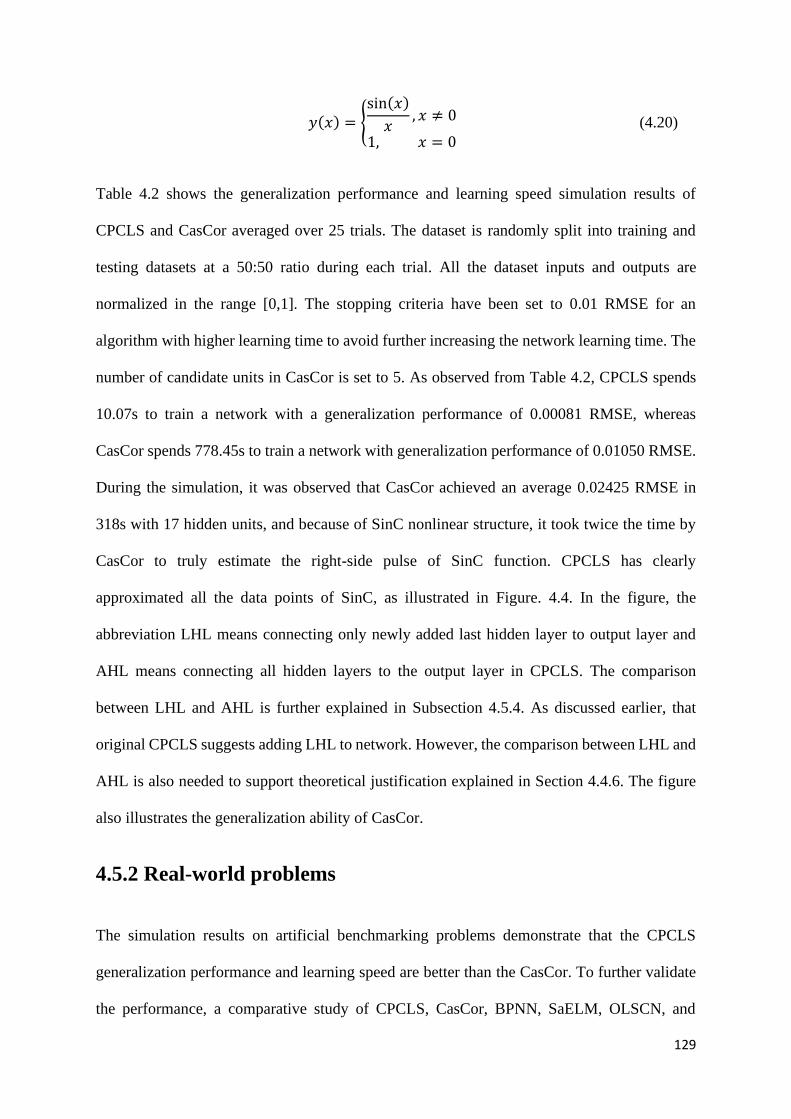
129
𝑦(𝑥) = {sin(𝑥)
𝑥, 𝑥 ≠ 0
1, 𝑥 = 0 (4.20)
Table 4.2 shows the generalization performance and learning speed simulation results of
CPCLS and CasCor averaged over 25 trials. The dataset is randomly split into training and
testing datasets at a 50:50 ratio during each trial. All the dataset inputs and outputs are
normalized in the range [0,1]. The stopping criteria have been set to 0.01 RMSE for an
algorithm with higher learning time to avoid further increasing the network learning time. The
number of candidate units in CasCor is set to 5. As observed from Table 4.2, CPCLS spends
10.07s to train a network with a generalization performance of 0.00081 RMSE, whereas
CasCor spends 778.45s to train a network with generalization performance of 0.01050 RMSE.
During the simulation, it was observed that CasCor achieved an average 0.02425 RMSE in
318s with 17 hidden units, and because of SinC nonlinear structure, it took twice the time by
CasCor to truly estimate the right-side pulse of SinC function. CPCLS has clearly
approximated all the data points of SinC, as illustrated in Figure. 4.4. In the figure, the
abbreviation LHL means connecting only newly added last hidden layer to output layer and
AHL means connecting all hidden layers to the output layer in CPCLS. The comparison
between LHL and AHL is further explained in Subsection 4.5.4. As discussed earlier, that
original CPCLS suggests adding LHL to network. However, the comparison between LHL and
AHL is also needed to support theoretical justification explained in Section 4.4.6. The figure
also illustrates the generalization ability of CasCor.
4.5.2 Real-world problems
The simulation results on artificial benchmarking problems demonstrate that the CPCLS
generalization performance and learning speed are better than the CasCor. To further validate
the performance, a comparative study of CPCLS, CasCor, BPNN, SaELM, OLSCN, and
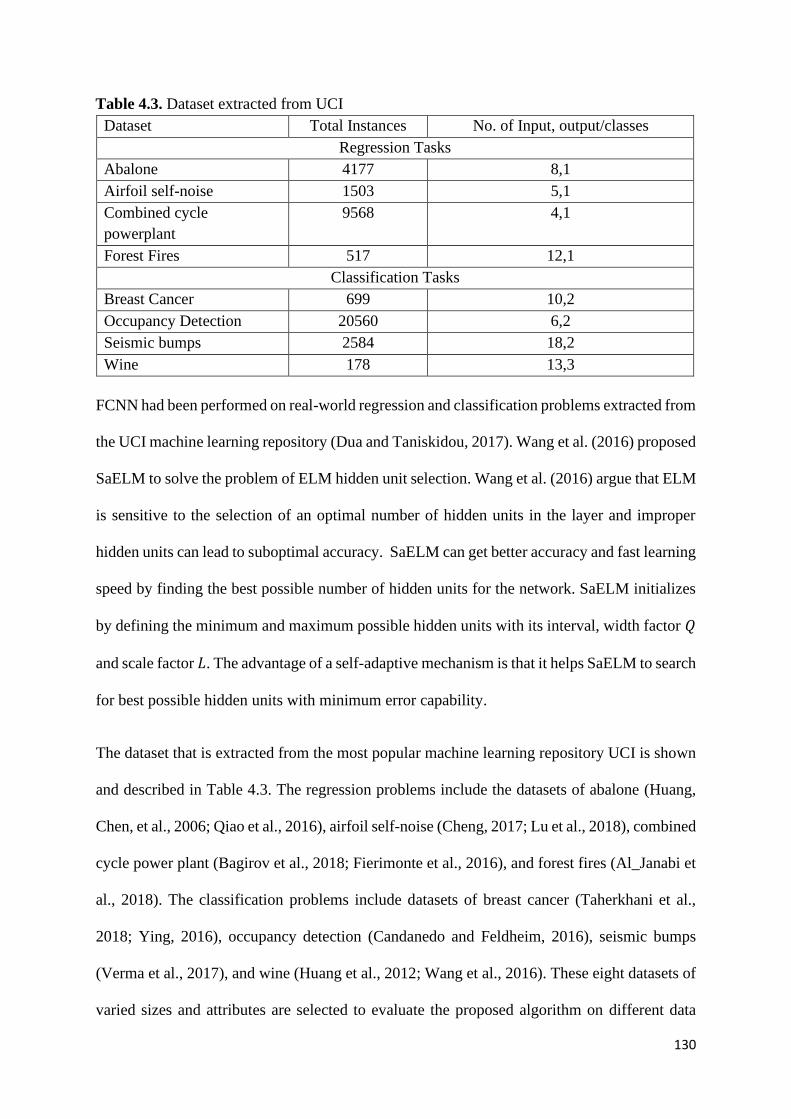
130
FCNN had been performed on real-world regression and classification problems extracted from
the UCI machine learning repository (Dua and Taniskidou, 2017). Wang et al. (2016) proposed
SaELM to solve the problem of ELM hidden unit selection. Wang et al. (2016) argue that ELM
is sensitive to the selection of an optimal number of hidden units in the layer and improper
hidden units can lead to suboptimal accuracy. SaELM can get better accuracy and fast learning
speed by finding the best possible number of hidden units for the network. SaELM initializes
by defining the minimum and maximum possible hidden units with its interval, width factor 𝑄
and scale factor 𝐿. The advantage of a self-adaptive mechanism is that it helps SaELM to search
for best possible hidden units with minimum error capability.
The dataset that is extracted from the most popular machine learning repository UCI is shown
and described in Table 4.3. The regression problems include the datasets of abalone (Huang,
Chen, et al., 2006; Qiao et al., 2016), airfoil self-noise (Cheng, 2017; Lu et al., 2018), combined
cycle power plant (Bagirov et al., 2018; Fierimonte et al., 2016), and forest fires (Al_Janabi et
al., 2018). The classification problems include datasets of breast cancer (Taherkhani et al.,
2018; Ying, 2016), occupancy detection (Candanedo and Feldheim, 2016), seismic bumps
(Verma et al., 2017), and wine (Huang et al., 2012; Wang et al., 2016). These eight datasets of
varied sizes and attributes are selected to evaluate the proposed algorithm on different data
Table 4.3. Dataset extracted from UCI
Dataset Total Instances No. of Input, output/classes
Regression Tasks
Abalone 4177 8,1
Airfoil self-noise 1503 5,1
Combined cycle
powerplant
9568 4,1
Forest Fires 517 12,1
Classification Tasks
Breast Cancer 699 10,2
Occupancy Detection 20560 6,2
Seismic bumps 2584 18,2
Wine 178 13,3
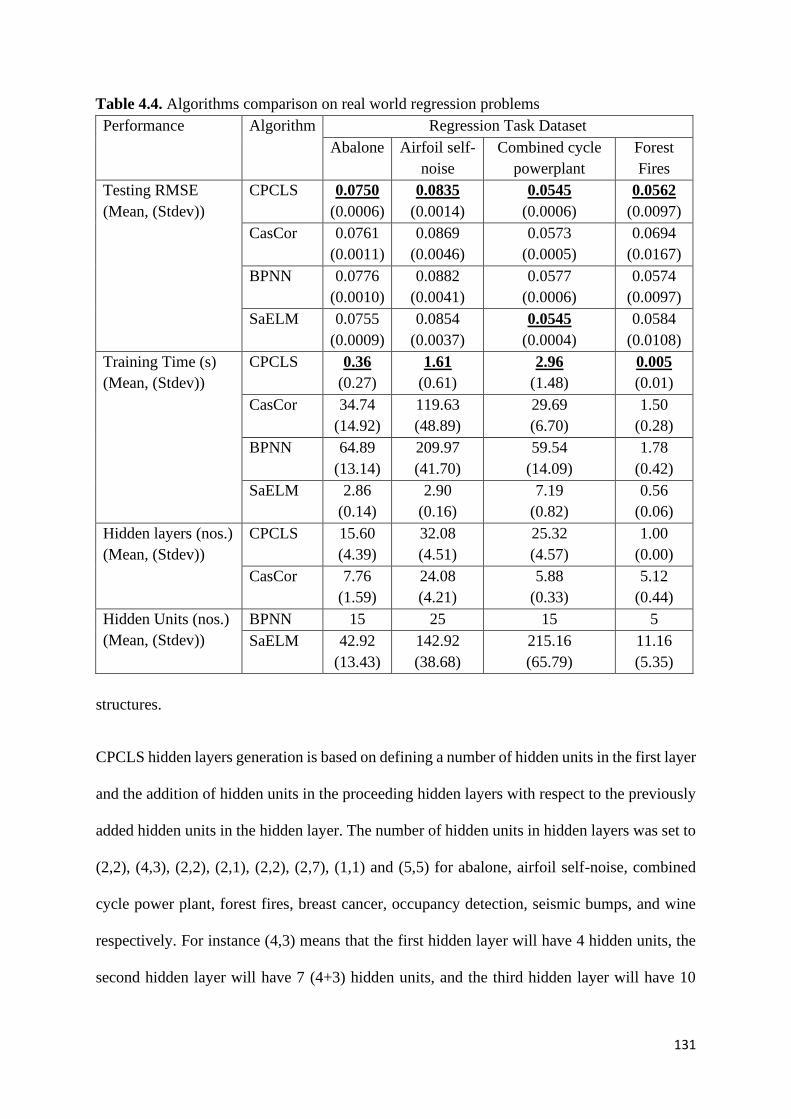
131
structures.
CPCLS hidden layers generation is based on defining a number of hidden units in the first layer
and the addition of hidden units in the proceeding hidden layers with respect to the previously
added hidden units in the hidden layer. The number of hidden units in hidden layers was set to
(2,2), (4,3), (2,2), (2,1), (2,2), (2,7), (1,1) and (5,5) for abalone, airfoil self-noise, combined
cycle power plant, forest fires, breast cancer, occupancy detection, seismic bumps, and wine
respectively. For instance (4,3) means that the first hidden layer will have 4 hidden units, the
second hidden layer will have 7 (4+3) hidden units, and the third hidden layer will have 10
Table 4.4. Algorithms comparison on real world regression problems
Performance Algorithm Regression Task Dataset
Abalone Airfoil self-
noise
Combined cycle
powerplant
Forest
Fires
Testing RMSE
(Mean, (Stdev))
CPCLS 0.0750
(0.0006)
0.0835
(0.0014)
0.0545
(0.0006)
0.0562
(0.0097)
CasCor 0.0761
(0.0011)
0.0869
(0.0046)
0.0573
(0.0005)
0.0694
(0.0167)
BPNN 0.0776
(0.0010)
0.0882
(0.0041)
0.0577
(0.0006)
0.0574
(0.0097)
SaELM 0.0755
(0.0009)
0.0854
(0.0037)
0.0545
(0.0004)
0.0584
(0.0108)
Training Time (s)
(Mean, (Stdev))
CPCLS 0.36
(0.27)
1.61
(0.61)
2.96
(1.48)
0.005
(0.01)
CasCor 34.74
(14.92)
119.63
(48.89)
29.69
(6.70)
1.50
(0.28)
BPNN 64.89
(13.14)
209.97
(41.70)
59.54
(14.09)
1.78
(0.42)
SaELM 2.86
(0.14)
2.90
(0.16)
7.19
(0.82)
0.56
(0.06)
Hidden layers (nos.)
(Mean, (Stdev))
CPCLS 15.60
(4.39)
32.08
(4.51)
25.32
(4.57)
1.00
(0.00)
CasCor 7.76
(1.59)
24.08
(4.21)
5.88
(0.33)
5.12
(0.44)
Hidden Units (nos.)
(Mean, (Stdev))
BPNN 15 25 15 5
SaELM 42.92
(13.43)
142.92
(38.68)
215.16
(65.79)
11.16
(5.35)
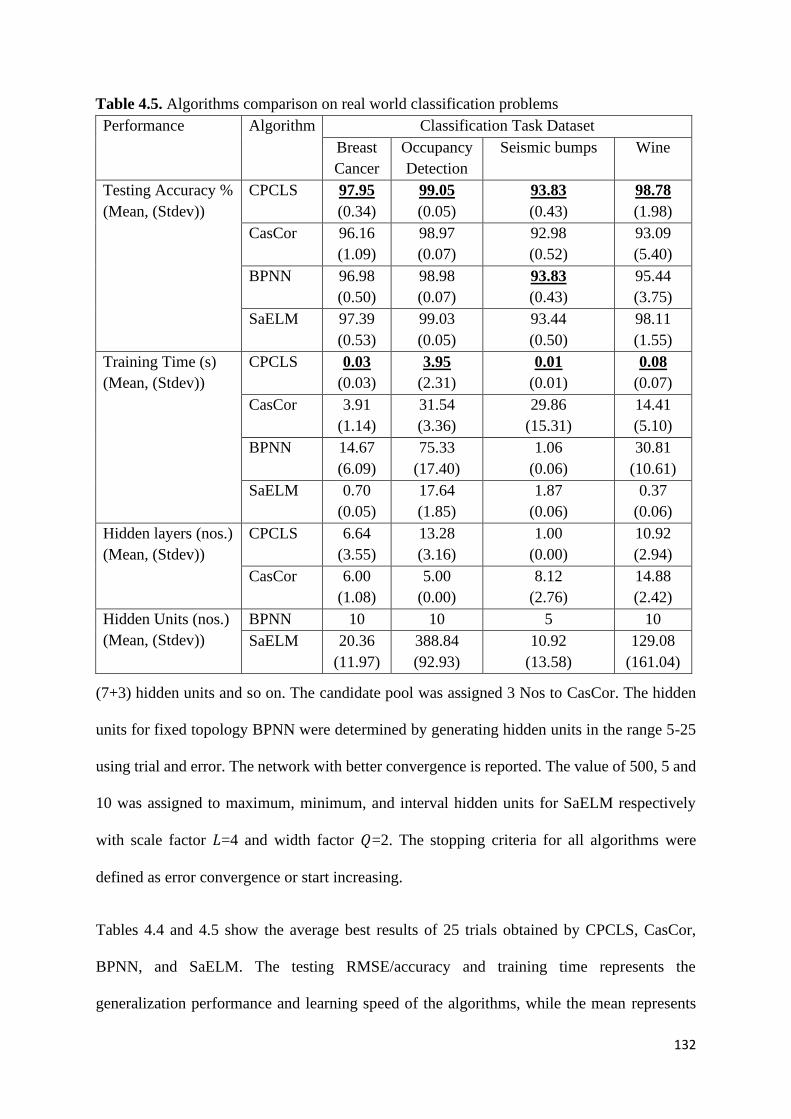
132
(7+3) hidden units and so on. The candidate pool was assigned 3 Nos to CasCor. The hidden
units for fixed topology BPNN were determined by generating hidden units in the range 5-25
using trial and error. The network with better convergence is reported. The value of 500, 5 and
10 was assigned to maximum, minimum, and interval hidden units for SaELM respectively
with scale factor 𝐿=4 and width factor 𝑄=2. The stopping criteria for all algorithms were
defined as error convergence or start increasing.
Tables 4.4 and 4.5 show the average best results of 25 trials obtained by CPCLS, CasCor,
BPNN, and SaELM. The testing RMSE/accuracy and training time represents the
generalization performance and learning speed of the algorithms, while the mean represents
Table 4.5. Algorithms comparison on real world classification problems
Performance Algorithm Classification Task Dataset
Breast
Cancer
Occupancy
Detection
Seismic bumps Wine
Testing Accuracy %
(Mean, (Stdev))
CPCLS 97.95
(0.34)
99.05
(0.05)
93.83
(0.43)
98.78
(1.98)
CasCor 96.16
(1.09)
98.97
(0.07)
92.98
(0.52)
93.09
(5.40)
BPNN 96.98
(0.50)
98.98
(0.07)
93.83
(0.43)
95.44
(3.75)
SaELM 97.39
(0.53)
99.03
(0.05)
93.44
(0.50)
98.11
(1.55)
Training Time (s)
(Mean, (Stdev))
CPCLS 0.03
(0.03)
3.95
(2.31)
0.01
(0.01)
0.08
(0.07)
CasCor 3.91
(1.14)
31.54
(3.36)
29.86
(15.31)
14.41
(5.10)
BPNN 14.67
(6.09)
75.33
(17.40)
1.06
(0.06)
30.81
(10.61)
SaELM 0.70
(0.05)
17.64
(1.85)
1.87
(0.06)
0.37
(0.06)
Hidden layers (nos.)
(Mean, (Stdev))
CPCLS 6.64
(3.55)
13.28
(3.16)
1.00
(0.00)
10.92
(2.94)
CasCor 6.00
(1.08)
5.00
(0.00)
8.12
(2.76)
14.88
(2.42)
Hidden Units (nos.)
(Mean, (Stdev))
BPNN 10 10 5 10
SaELM 20.36
(11.97)
388.84
(92.93)
10.92
(13.58)
129.08
(161.04)
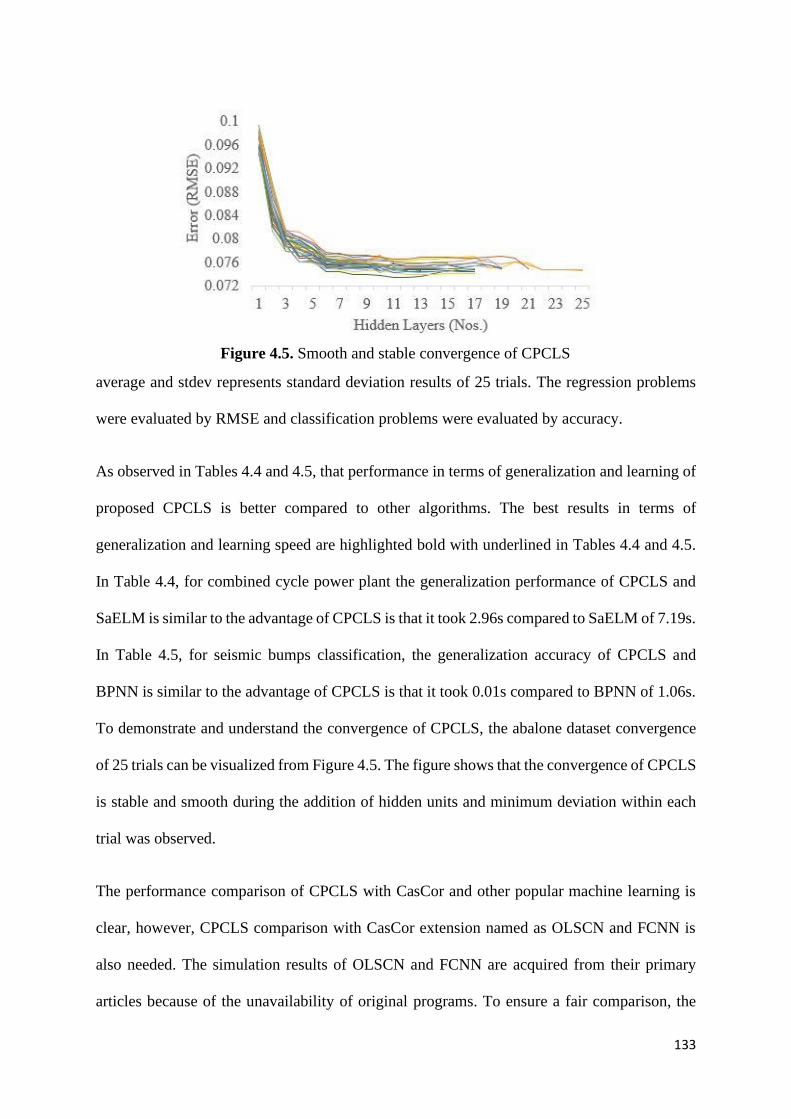
133
average and stdev represents standard deviation results of 25 trials. The regression problems
were evaluated by RMSE and classification problems were evaluated by accuracy.
As observed in Tables 4.4 and 4.5, that performance in terms of generalization and learning of
proposed CPCLS is better compared to other algorithms. The best results in terms of
generalization and learning speed are highlighted bold with underlined in Tables 4.4 and 4.5.
In Table 4.4, for combined cycle power plant the generalization performance of CPCLS and
SaELM is similar to the advantage of CPCLS is that it took 2.96s compared to SaELM of 7.19s.
In Table 4.5, for seismic bumps classification, the generalization accuracy of CPCLS and
BPNN is similar to the advantage of CPCLS is that it took 0.01s compared to BPNN of 1.06s.
To demonstrate and understand the convergence of CPCLS, the abalone dataset convergence
of 25 trials can be visualized from Figure 4.5. The figure shows that the convergence of CPCLS
is stable and smooth during the addition of hidden units and minimum deviation within each
trial was observed.
The performance comparison of CPCLS with CasCor and other popular machine learning is
clear, however, CPCLS comparison with CasCor extension named as OLSCN and FCNN is
also needed. The simulation results of OLSCN and FCNN are acquired from their primary
articles because of the unavailability of original programs. To ensure a fair comparison, the
Figure 4.5. Smooth and stable convergence of CPCLS
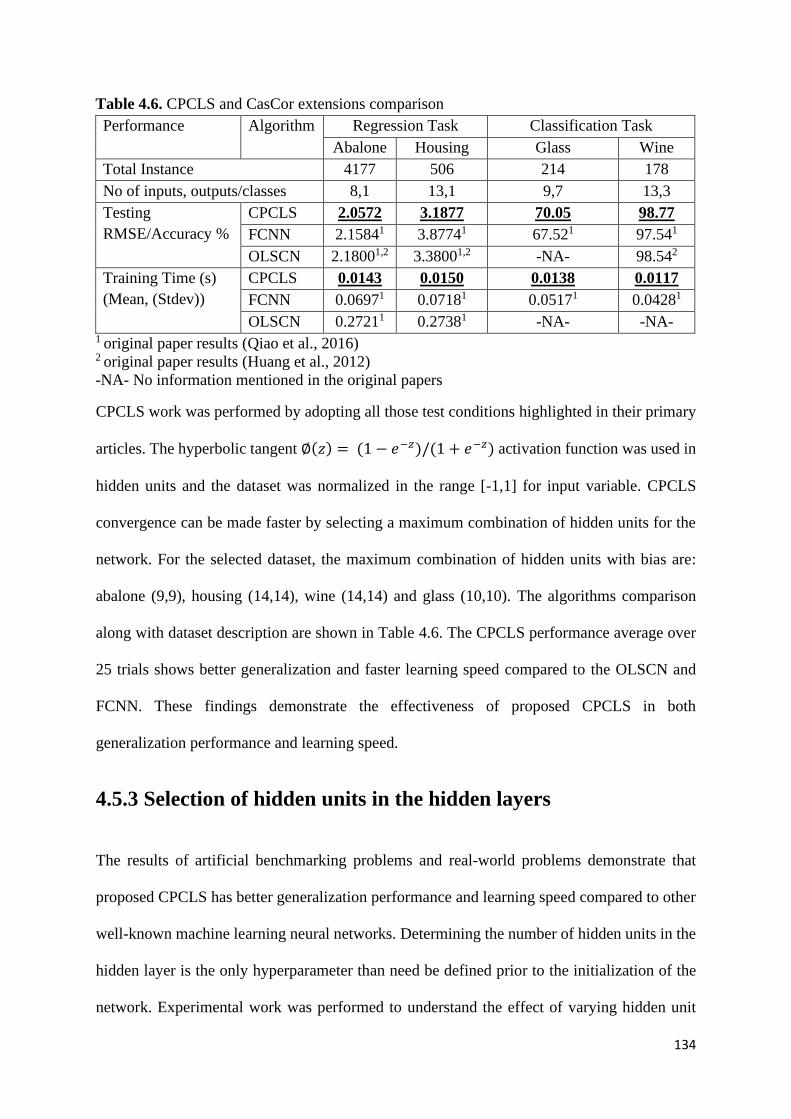
134
CPCLS work was performed by adopting all those test conditions highlighted in their primary
articles. The hyperbolic tangent ∅(𝑧) = (1 − 𝑒−𝑧)/(1 + 𝑒−𝑧) activation function was used in
hidden units and the dataset was normalized in the range [-1,1] for input variable. CPCLS
convergence can be made faster by selecting a maximum combination of hidden units for the
network. For the selected dataset, the maximum combination of hidden units with bias are:
abalone (9,9), housing (14,14), wine (14,14) and glass (10,10). The algorithms comparison
along with dataset description are shown in Table 4.6. The CPCLS performance average over
25 trials shows better generalization and faster learning speed compared to the OLSCN and
FCNN. These findings demonstrate the effectiveness of proposed CPCLS in both
generalization performance and learning speed.
4.5.3 Selection of hidden units in the hidden layers
The results of artificial benchmarking problems and real-world problems demonstrate that
proposed CPCLS has better generalization performance and learning speed compared to other
well-known machine learning neural networks. Determining the number of hidden units in the
hidden layer is the only hyperparameter than need be defined prior to the initialization of the
network. Experimental work was performed to understand the effect of varying hidden unit
Table 4.6. CPCLS and CasCor extensions comparison
Performance Algorithm Regression Task Classification Task
Abalone Housing Glass Wine
Total Instance 4177 506 214 178
No of inputs, outputs/classes 8,1 13,1 9,7 13,3
Testing
RMSE/Accuracy %
CPCLS 2.0572 3.1877 70.05 98.77
FCNN 2.15841 3.87741 67.521 97.541
OLSCN 2.18001,2 3.38001,2 -NA- 98.542
Training Time (s)
(Mean, (Stdev))
CPCLS 0.0143 0.0150 0.0138 0.0117
FCNN 0.06971 0.07181 0.05171 0.04281
OLSCN 0.27211 0.27381 -NA- -NA- 1 original paper results (Qiao et al., 2016) 2 original paper results (Huang et al., 2012)
-NA- No information mentioned in the original papers
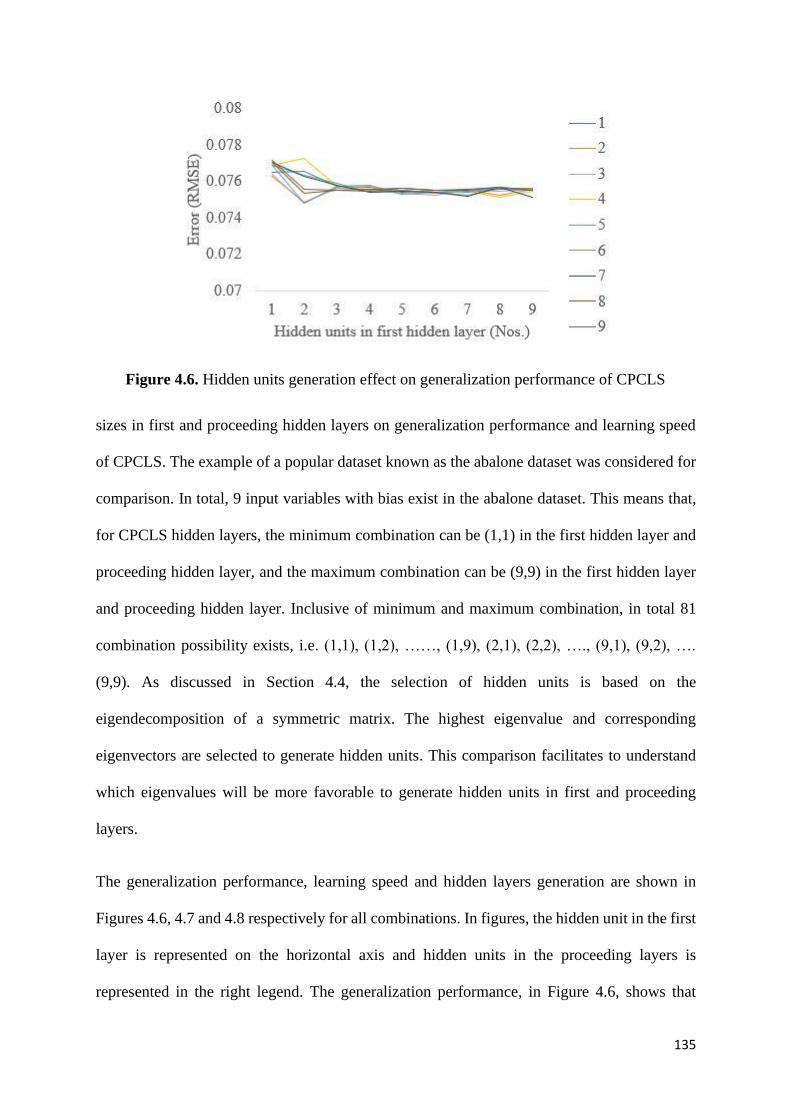
135
sizes in first and proceeding hidden layers on generalization performance and learning speed
of CPCLS. The example of a popular dataset known as the abalone dataset was considered for
comparison. In total, 9 input variables with bias exist in the abalone dataset. This means that,
for CPCLS hidden layers, the minimum combination can be (1,1) in the first hidden layer and
proceeding hidden layer, and the maximum combination can be (9,9) in the first hidden layer
and proceeding hidden layer. Inclusive of minimum and maximum combination, in total 81
combination possibility exists, i.e. (1,1), (1,2), ……, (1,9), (2,1), (2,2), …., (9,1), (9,2), ….
(9,9). As discussed in Section 4.4, the selection of hidden units is based on the
eigendecomposition of a symmetric matrix. The highest eigenvalue and corresponding
eigenvectors are selected to generate hidden units. This comparison facilitates to understand
which eigenvalues will be more favorable to generate hidden units in first and proceeding
layers.
The generalization performance, learning speed and hidden layers generation are shown in
Figures 4.6, 4.7 and 4.8 respectively for all combinations. In figures, the hidden unit in the first
layer is represented on the horizontal axis and hidden units in the proceeding layers is
represented in the right legend. The generalization performance, in Figure 4.6, shows that
Figure 4.6. Hidden units generation effect on generalization performance of CPCLS
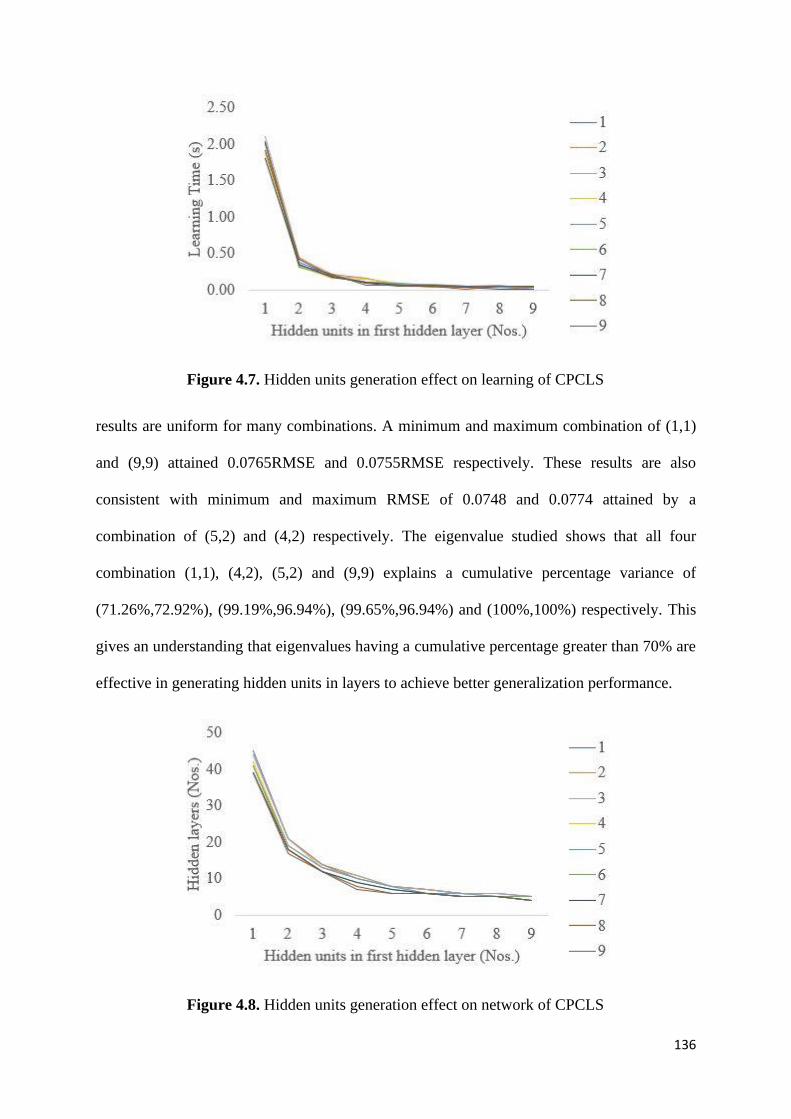
136
results are uniform for many combinations. A minimum and maximum combination of (1,1)
and (9,9) attained 0.0765RMSE and 0.0755RMSE respectively. These results are also
consistent with minimum and maximum RMSE of 0.0748 and 0.0774 attained by a
combination of (5,2) and (4,2) respectively. The eigenvalue studied shows that all four
combination (1,1), (4,2), (5,2) and (9,9) explains a cumulative percentage variance of
(71.26%,72.92%), (99.19%,96.94%), (99.65%,96.94%) and (100%,100%) respectively. This
gives an understanding that eigenvalues having a cumulative percentage greater than 70% are
effective in generating hidden units in layers to achieve better generalization performance.
Figure 4.7. Hidden units generation effect on learning of CPCLS
Figure 4.8. Hidden units generation effect on network of CPCLS
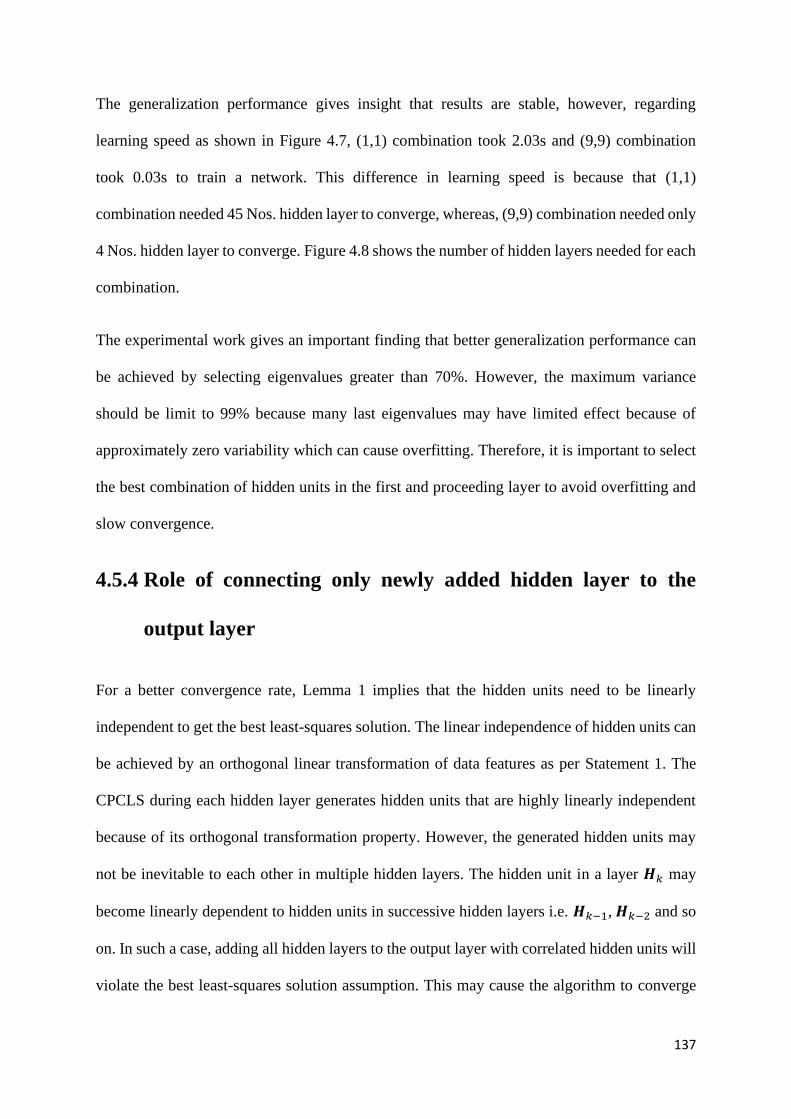
137
The generalization performance gives insight that results are stable, however, regarding
learning speed as shown in Figure 4.7, (1,1) combination took 2.03s and (9,9) combination
took 0.03s to train a network. This difference in learning speed is because that (1,1)
combination needed 45 Nos. hidden layer to converge, whereas, (9,9) combination needed only
4 Nos. hidden layer to converge. Figure 4.8 shows the number of hidden layers needed for each
combination.
The experimental work gives an important finding that better generalization performance can
be achieved by selecting eigenvalues greater than 70%. However, the maximum variance
should be limit to 99% because many last eigenvalues may have limited effect because of
approximately zero variability which can cause overfitting. Therefore, it is important to select
the best combination of hidden units in the first and proceeding layer to avoid overfitting and
slow convergence.
4.5.4 Role of connecting only newly added hidden layer to the
output layer
For a better convergence rate, Lemma 1 implies that the hidden units need to be linearly
independent to get the best least-squares solution. The linear independence of hidden units can
be achieved by an orthogonal linear transformation of data features as per Statement 1. The
CPCLS during each hidden layer generates hidden units that are highly linearly independent
because of its orthogonal transformation property. However, the generated hidden units may
not be inevitable to each other in multiple hidden layers. The hidden unit in a layer 𝑯𝑘 may
become linearly dependent to hidden units in successive hidden layers i.e. 𝑯𝑘−1, 𝑯𝑘−2 and so
on. In such a case, adding all hidden layers to the output layer with correlated hidden units will
violate the best least-squares solution assumption. This may cause the algorithm to converge
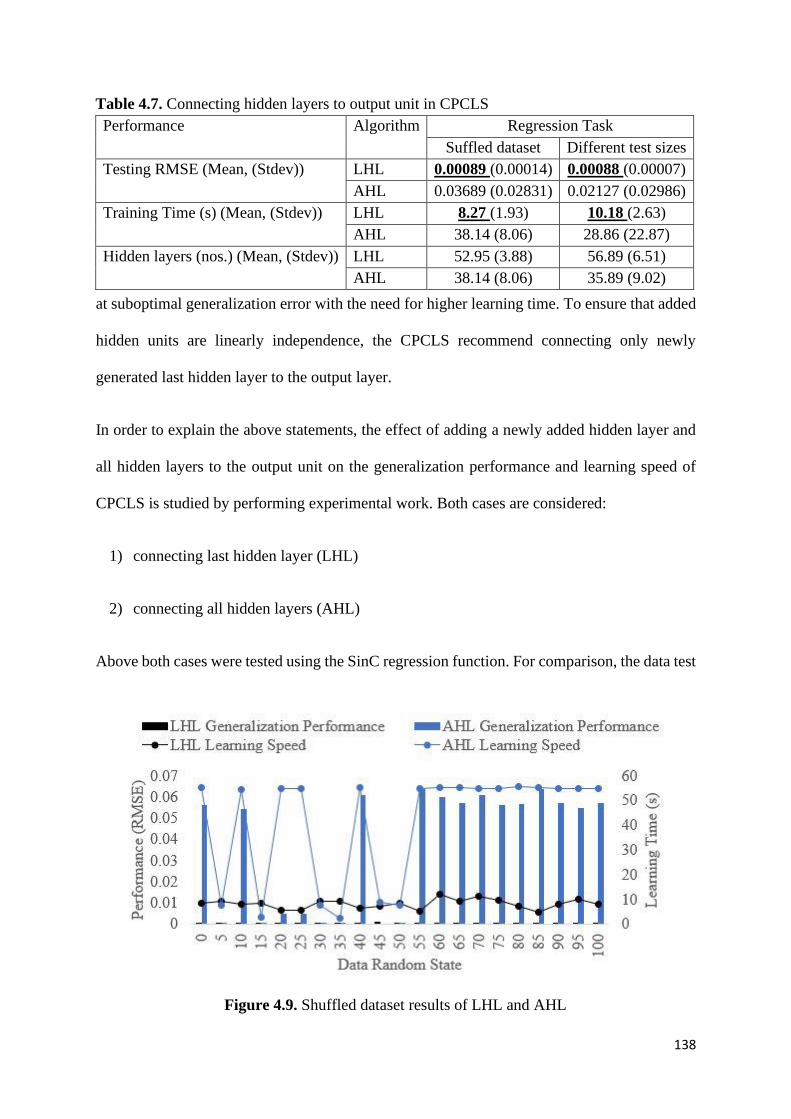
138
at suboptimal generalization error with the need for higher learning time. To ensure that added
hidden units are linearly independence, the CPCLS recommend connecting only newly
generated last hidden layer to the output layer.
In order to explain the above statements, the effect of adding a newly added hidden layer and
all hidden layers to the output unit on the generalization performance and learning speed of
CPCLS is studied by performing experimental work. Both cases are considered:
1) connecting last hidden layer (LHL)
2) connecting all hidden layers (AHL)
Above both cases were tested using the SinC regression function. For comparison, the data test
Figure 4.9. Shuffled dataset results of LHL and AHL
Table 4.7. Connecting hidden layers to output unit in CPCLS
Performance Algorithm Regression Task
Suffled dataset Different test sizes
Testing RMSE (Mean, (Stdev)) LHL 0.00089 (0.00014) 0.00088 (0.00007)
AHL 0.03689 (0.02831) 0.02127 (0.02986)
Training Time (s) (Mean, (Stdev)) LHL 8.27 (1.93) 10.18 (2.63)
AHL 38.14 (8.06) 28.86 (22.87)
Hidden layers (nos.) (Mean, (Stdev)) LHL 52.95 (3.88) 56.89 (6.51)
AHL 38.14 (8.06) 35.89 (9.02)
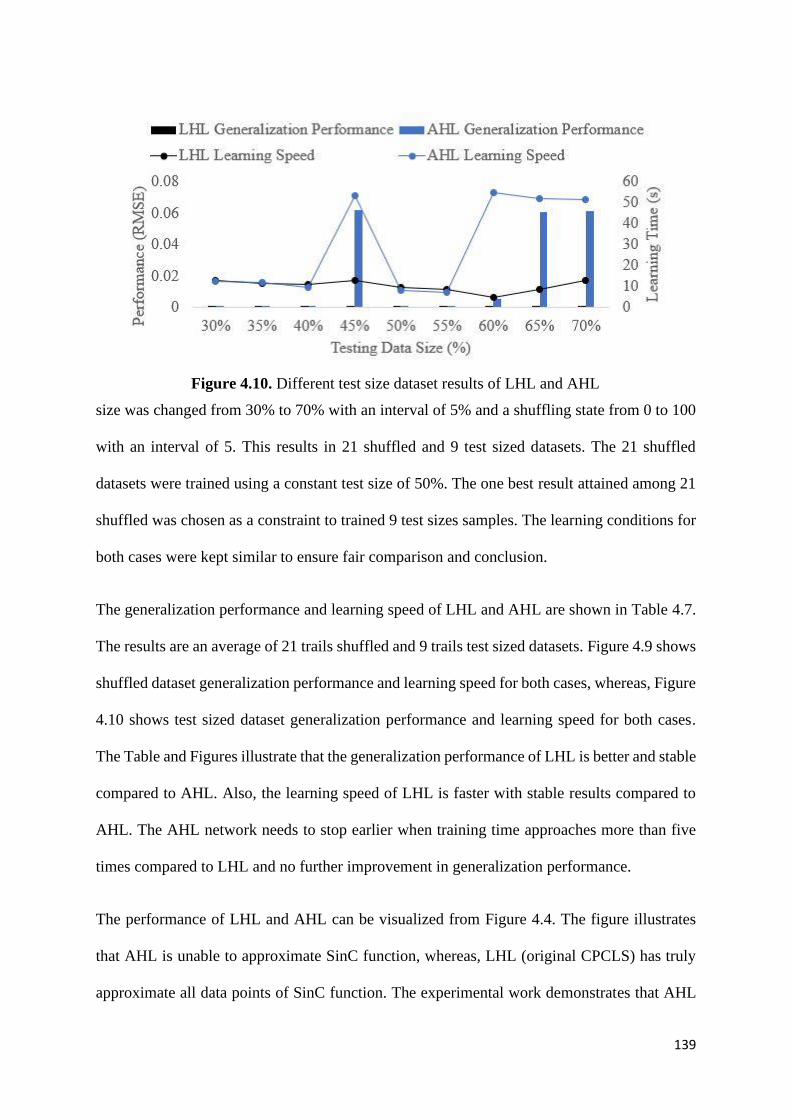
139
size was changed from 30% to 70% with an interval of 5% and a shuffling state from 0 to 100
with an interval of 5. This results in 21 shuffled and 9 test sized datasets. The 21 shuffled
datasets were trained using a constant test size of 50%. The one best result attained among 21
shuffled was chosen as a constraint to trained 9 test sizes samples. The learning conditions for
both cases were kept similar to ensure fair comparison and conclusion.
The generalization performance and learning speed of LHL and AHL are shown in Table 4.7.
The results are an average of 21 trails shuffled and 9 trails test sized datasets. Figure 4.9 shows
shuffled dataset generalization performance and learning speed for both cases, whereas, Figure
4.10 shows test sized dataset generalization performance and learning speed for both cases.
The Table and Figures illustrate that the generalization performance of LHL is better and stable
compared to AHL. Also, the learning speed of LHL is faster with stable results compared to
AHL. The AHL network needs to stop earlier when training time approaches more than five
times compared to LHL and no further improvement in generalization performance.
The performance of LHL and AHL can be visualized from Figure 4.4. The figure illustrates
that AHL is unable to approximate SinC function, whereas, LHL (original CPCLS) has truly
approximate all data points of SinC function. The experimental work demonstrates that AHL
Figure 4.10. Different test size dataset results of LHL and AHL
140
results maybe not optimal in many cases compared to LHL. Furthermore, during all trails, it is
observed that CPCLS with LHL gives better and stable results with lesser deviation.
4.6 Summary
In this Chapter, experimental work demonstrates that the newly proposed algorithm known as
CPCLS achieves better generalization performance and faster learning speed, with improved
cascade architecture and tuning free learning method, as compared to similar constructive and
traditional algorithms. CPCLS has several noteworthy features:
▪ The proposed algorithm has achieved better generalization performance. Experimental
results show that improvement in the cascade architecture creates less burden on the
network and it converges more efficiently towards the target error. The proposed
algorithm works more analytically by determining the optimal connection weights,
rather than the gradient optimization and random generation techniques. Determining
the input connection weights analytically by OLT helps in generating linearly
independent hidden units, explaining the maximum variance in the dataset with
maximum error reduction capability.
▪ The learning speed is fast due to analytically calculating connection weights in the
forward step. Unlike the gradient method and random generation, that are involved in
finding optimal connection weights. CPCLS takes only a forward step to calculate the
target error by analytically calculating the connection weights on both sides of the
network.
▪ CasCor needs a lot of human expertise to control the learning because of the QP large
steps which can cause the network to behave chaotically. The QP can encounter the
problem of zero derivative difference which needs extra control to stop the iterations
141
early to prevent overflow problems in the network. CPCLS advantage over QP CasCor
that of tuning free learning.
▪ CPCLS better network generalization performance validates that the hidden layers
generated are capable of maximum error reduction.
▪ Like other gradient-free learning algorithms i.e.; SaELM, the proposed algorithm can
work directly with differential activation functions (e.g. sigmoid, hyperbolic tangent,
rectified linear unit and so on) and nondifferential activation function (e.g.; threshold).
Gradient-based methods cannot handle nondifferential activation functions directly
because of their differentiation property.
▪ The proposed algorithm has solved the problem of linearly dependent input features and
hidden units. It reduces the chance of multicollinearity by orthogonally transforming the
set of any correlated input units and any pre-existing hidden units into uncorrelated
hidden units. The newly added last hidden layer with characteristics of linearly
independent hidden units is connected to the output layer for the best least-squares
solution.
▪ The proposed method is easy to apply in many application areas because of the small
number of user-specified hyperparameters, such as hidden units addition and target
error.
The better generalization performance and learning ability of CPCLS on nonlinear benchmark
problems and real-world problems, verify that it can be efficiently applied to other application
tasks.
142
Chapter 5. Reducing the Negative Role of Global
Parameters with Default Values and Varying Operational
Parameters Effect on the Trip Fuel Estimation
5.1 Introduction
The usage of global parameters with default values rather than local parameters with an
outdated database in the complex mathematical formulation may cause EAs higher fuel
deviation. The low generalization performance and slow learning speed of BPNN may make it
inappropriate to extract information from high-level operational parameters having varying
behaviour among different sectors. To estimate a trip fuel with less deviation, requiring less
expertise, and achieving faster learning speed, real high-dimensional data were provided by an
airline that historically performed international flights in various regions over two years. The
dataset consists of several operational parameters that may or may not contribute to fuel
consumption. For better estimation, the useful operational parameters were first extracted, as
reported in Table 3.1. In our study, the extracted operational parameters are represented by 𝑿
and the objective is to predict the trip fuel �̂� that truly represents the actual consumed trip fuel
𝒀. Two cases were considered for estimating trip fuel consumption. In the first case, all sectors
in the dataset were considered as a combined model. In the second case, each sector was
considered as an individual model. A sector is defined as an airway route starting from the
departure airport and ending in the arrival airport. A comparison of proposed CPCLS is
performed with AEA and BPNN to demonstrate its effectiveness. The study illustrates that the
AEA is highly affected by the usage of global parameters, and the BPNN generalization
performance and learning speed start decreasing with high dimensional data having high-level
operational parameters.
143
The rest of the Chapter is organized as follows. Section 5.2 is about the problem context. In
Section 5.3, fuel consumption data analytics is elaborated. In Section 5.4, solution methods and
their performance analysis are performed by considering two models: combined model
(Subsection 5.4.2.1) and individual model (Subsection 5.4.2.2). Moreover, a comparison is also
made, and major findings are discussed. Section 5.5 concludes this chapter by summarizing
major findings.
5.2 Problem context
The effect of usage of global parameters with default values rather than local parameters,
outdated database, complex mathematical formulation, hyperparameters adjustment, human
intervention and varying nature of operational parameters may cause a negative role by
deviating fuel consumption from estimation. The proposed CPCLS that has characteristics of
better generalization performance and faster learning speed with less human intervention needs
to apply to estimate aircraft trip fuel to demonstrate its effectiveness as a decision tool for
airlines. All the experimental work was carried out in Anaconda Spyder Python v3.2.6
programming language. The dataset was normalized in the range [0,1]. One hot encoding was
performed on categorical variables to represent it in a binary vector. The nonlinear sigmoid
activation function was used in the hidden layers to make it compatible with the dataset. For
both cases, the dataset was split into a 50:50 ratio for training and testing. The stopping criteria
for the algorithms were defined as error convergence or start increasing.
5.3 Data analytics for fuel consumption
The set of real data that we obtained from an international airline operating in Hong Kong
consists of 19,117 international passenger and cargo flights operated among eight sectors
covering different geographical regions. The flights were performed from April 2015 to March
144
2017 by 107 wide-body aircrafts distributed as Airbus A330-300 (31 aircrafts) and Boeing 747-
400 (9 aircrafts)/747-800 (14 aircrafts)/777-300 (53 aircrafts). The data consist of detailed
information on operational parameters related to 1) carrier with aircraft performance and
operations, 2) date/time of departure and arrival per sector with crew allocation, 3) weather and
atmospheric conditions, 4) sector and aircraft local and global conditions, and 5) fuel
requirements at different tanks and consumption levels. Among the collected data, instead of
putting all operational parameters into algorithms, we work in a more novel way by extracting
the relevant high-level operational parameters contributing to fuel consumption, as summarised
in Table 3.1.
5.4 Solution methods and computational results
5.4.1 Proposed method and existing methods
Three estimation methods were used for the comparative study, namely AEA, BPNN, and the
proposed CPCLS. The comparison is important to study the performance of CPCLS compared
to existing AEA and BPNN. For AEA, the estimated and actual consumed fuel information
was retrieved from available data. CPCLS is compared to AEA in terms of fuel deviation,
whereas its comparison with BPNN is in terms of both fuel deviation and learning speed. The
limitation of the study is that the computational time for AEA is not mentioned because the
information is not available in the historical dataset provided by the airline. The CPCLS is
initialized with 5 hidden units in the first layer and 15 added hidden units in the next hidden
layers with respect to previously added hidden units. Among different trial-and-error
approaches, BPNN is selected, with 10 hidden units and 0.5 learning rate as the best
hyperparameters for the network.
145
5.4.2 Trip fuel estimation methods performance analysis and
discussion
The main objective of our study is to develop a method capable of accurately and efficiently
estimating trip fuel; however, a comparison with existing methods plays an important role in
demonstrating effectiveness. To study the effect of operational parameters, the fuel is estimated
for the following two types of models:
5.4.2.1 All sectors combined for fuel estimation (referred to as a combined model)
5.4.2.2 Sector-wise fuel estimation (referred to as individual models)
5.4.2.1 Combined model
In this model, the trip fuel is estimated by considering all eight sectors of the 19,117 flights as
a combined model. The selection of operational parameters and their data trend plays a major
role in examining and analysing the estimation method. The significant difference in
operational parameter ranges and standard deviation may make estimating trip fuel accurately
a challenging task. The runway direction parameter is a categorical variable with 26 different
runway directions for eight sectors. One hot encoding pre-processing technique is applied to
each runway direction to represent it in a binary vector. It translates runway direction features
into 26 subfeatures as a binary value with 1 representing existence and 0 representing no
existence. All the flight phases such as takeoff, climb, cruise, descent, and approach are
considered as one entire flight trip.
Table 5.1 shows the trip fuel deviation resulting from AEA, BPNN, and CPCLS. The values
of Mean, StDev, Min, Q1, Med, Q3, Max, Ran, and IQR under the column absolute percent
error (APE) respectively refer to the mean, standard deviation, minimum, first quartile, median,
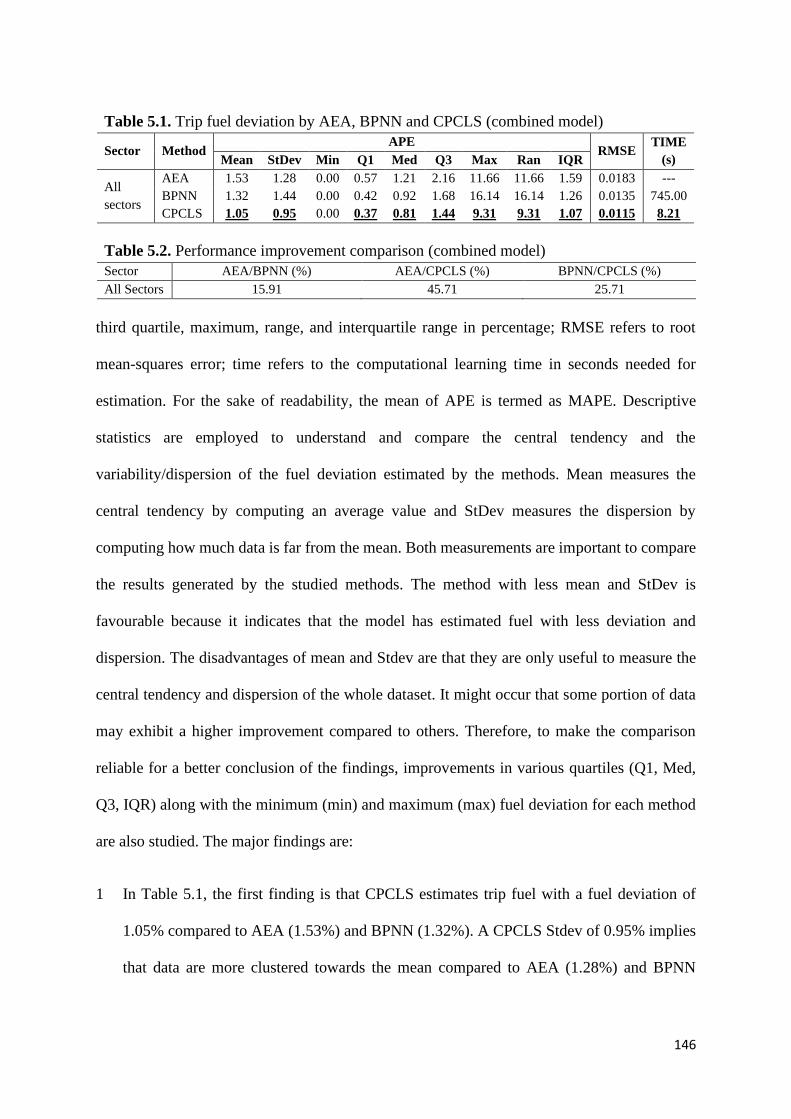
146
third quartile, maximum, range, and interquartile range in percentage; RMSE refers to root
mean-squares error; time refers to the computational learning time in seconds needed for
estimation. For the sake of readability, the mean of APE is termed as MAPE. Descriptive
statistics are employed to understand and compare the central tendency and the
variability/dispersion of the fuel deviation estimated by the methods. Mean measures the
central tendency by computing an average value and StDev measures the dispersion by
computing how much data is far from the mean. Both measurements are important to compare
the results generated by the studied methods. The method with less mean and StDev is
favourable because it indicates that the model has estimated fuel with less deviation and
dispersion. The disadvantages of mean and Stdev are that they are only useful to measure the
central tendency and dispersion of the whole dataset. It might occur that some portion of data
may exhibit a higher improvement compared to others. Therefore, to make the comparison
reliable for a better conclusion of the findings, improvements in various quartiles (Q1, Med,
Q3, IQR) along with the minimum (min) and maximum (max) fuel deviation for each method
are also studied. The major findings are:
1 In Table 5.1, the first finding is that CPCLS estimates trip fuel with a fuel deviation of
1.05% compared to AEA (1.53%) and BPNN (1.32%). A CPCLS Stdev of 0.95% implies
that data are more clustered towards the mean compared to AEA (1.28%) and BPNN
Table 5.1. Trip fuel deviation by AEA, BPNN and CPCLS (combined model)
Sector Method APE
RMSE TIME
(s) Mean StDev Min Q1 Med Q3 Max Ran IQR
All
sectors
AEA 1.53 1.28 0.00 0.57 1.21 2.16 11.66 11.66 1.59 0.0183 ---
BPNN 1.32 1.44 0.00 0.42 0.92 1.68 16.14 16.14 1.26 0.0135 745.00
CPCLS 1.05 0.95 0.00 0.37 0.81 1.44 9.31 9.31 1.07 0.0115 8.21
Table 5.2. Performance improvement comparison (combined model)
Sector AEA/BPNN (%) AEA/CPCLS (%) BPNN/CPCLS (%)
All Sectors 15.91 45.71 25.71
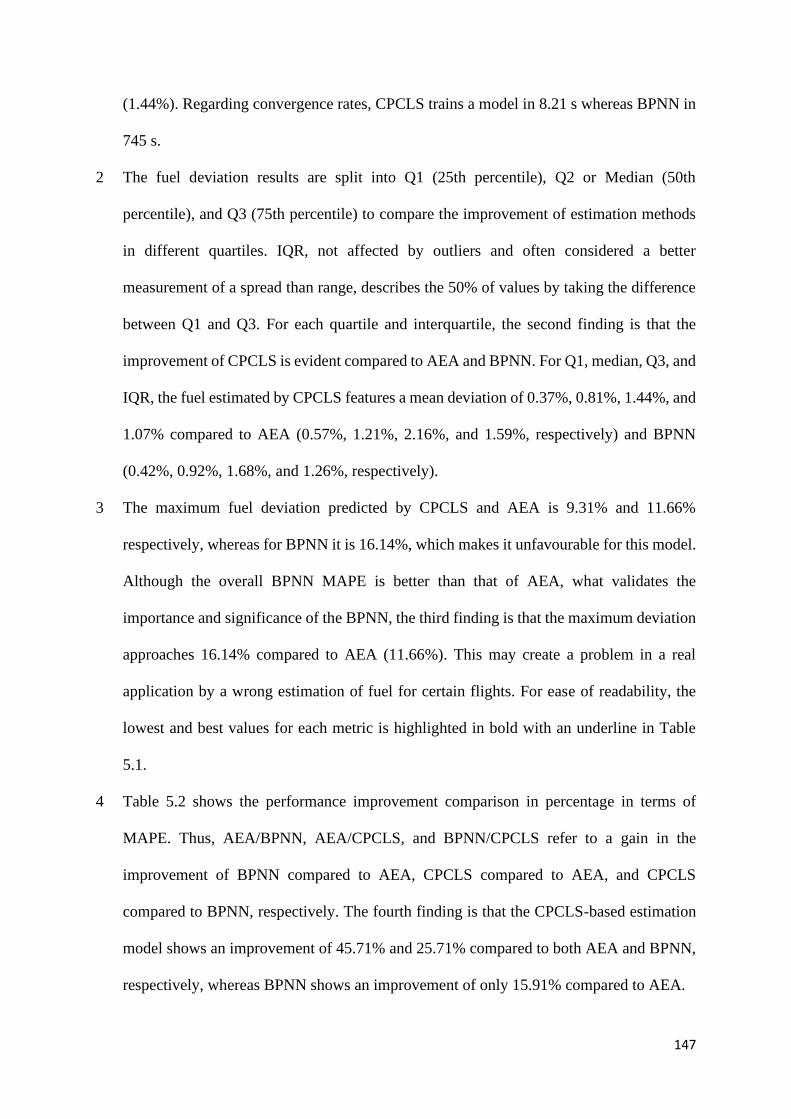
147
(1.44%). Regarding convergence rates, CPCLS trains a model in 8.21 s whereas BPNN in
745 s.
2 The fuel deviation results are split into Q1 (25th percentile), Q2 or Median (50th
percentile), and Q3 (75th percentile) to compare the improvement of estimation methods
in different quartiles. IQR, not affected by outliers and often considered a better
measurement of a spread than range, describes the 50% of values by taking the difference
between Q1 and Q3. For each quartile and interquartile, the second finding is that the
improvement of CPCLS is evident compared to AEA and BPNN. For Q1, median, Q3, and
IQR, the fuel estimated by CPCLS features a mean deviation of 0.37%, 0.81%, 1.44%, and
1.07% compared to AEA (0.57%, 1.21%, 2.16%, and 1.59%, respectively) and BPNN
(0.42%, 0.92%, 1.68%, and 1.26%, respectively).
3 The maximum fuel deviation predicted by CPCLS and AEA is 9.31% and 11.66%
respectively, whereas for BPNN it is 16.14%, which makes it unfavourable for this model.
Although the overall BPNN MAPE is better than that of AEA, what validates the
importance and significance of the BPNN, the third finding is that the maximum deviation
approaches 16.14% compared to AEA (11.66%). This may create a problem in a real
application by a wrong estimation of fuel for certain flights. For ease of readability, the
lowest and best values for each metric is highlighted in bold with an underline in Table
5.1.
4 Table 5.2 shows the performance improvement comparison in percentage in terms of
MAPE. Thus, AEA/BPNN, AEA/CPCLS, and BPNN/CPCLS refer to a gain in the
improvement of BPNN compared to AEA, CPCLS compared to AEA, and CPCLS
compared to BPNN, respectively. The fourth finding is that the CPCLS-based estimation
model shows an improvement of 45.71% and 25.71% compared to both AEA and BPNN,
respectively, whereas BPNN shows an improvement of only 15.91% compared to AEA.
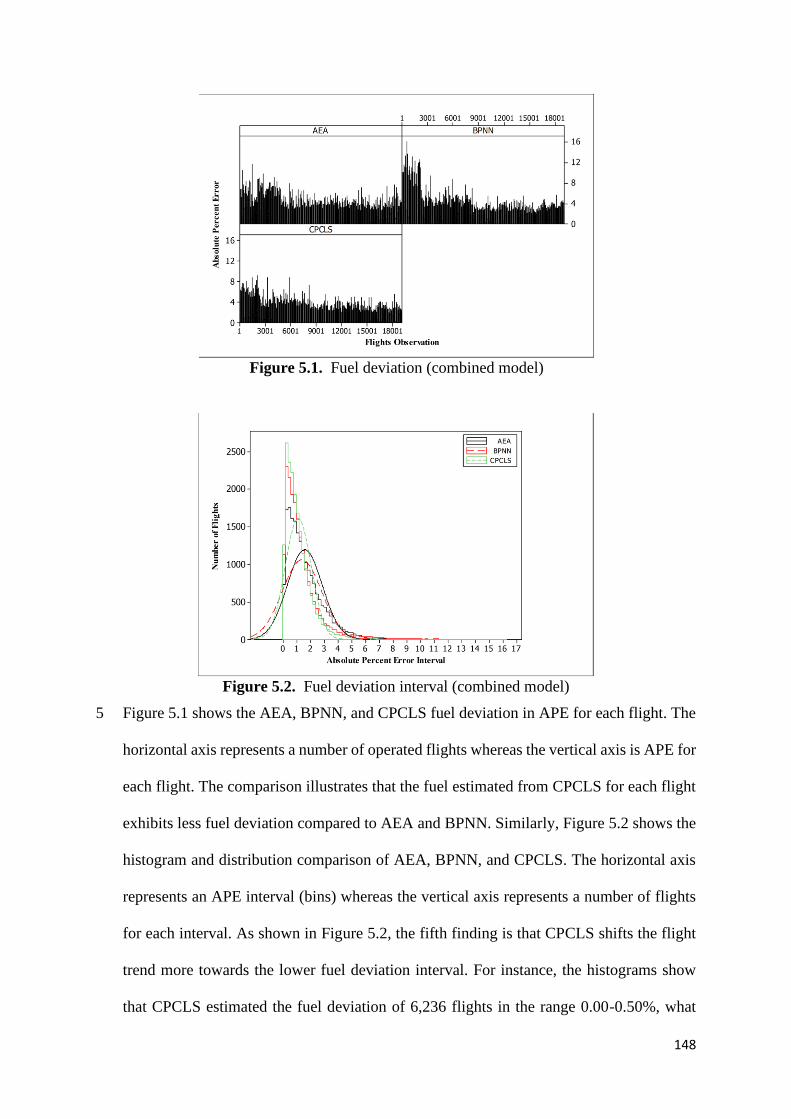
148
5 Figure 5.1 shows the AEA, BPNN, and CPCLS fuel deviation in APE for each flight. The
horizontal axis represents a number of operated flights whereas the vertical axis is APE for
each flight. The comparison illustrates that the fuel estimated from CPCLS for each flight
exhibits less fuel deviation compared to AEA and BPNN. Similarly, Figure 5.2 shows the
histogram and distribution comparison of AEA, BPNN, and CPCLS. The horizontal axis
represents an APE interval (bins) whereas the vertical axis represents a number of flights
for each interval. As shown in Figure 5.2, the fifth finding is that CPCLS shifts the flight
trend more towards the lower fuel deviation interval. For instance, the histograms show
that CPCLS estimated the fuel deviation of 6,236 flights in the range 0.00-0.50%, what
Figure 5.1. Fuel deviation (combined model)
Figure 5.2. Fuel deviation interval (combined model)
149
demonstrates an improvement of 47.77% and 11.35% compared to the 4,220 flights from
AEA and 5,600 flights from BPNN, respectively. For other histogram bins, the
improvement shown by CPCLS is more significant.
6 In addition, Figure 5.2 indicates the sixth finding, i.e., that CPCLS has more cluster
distribution (lower StDev) compared to the disperse distribution of AEA and BPNN.
7 However, Figure 5.1 shows that CPCLS and BPNN estimated the number of 2,000 flights
with less improvement in fuel deviation as compared to the remaining flights. An in-depth
analysis shows our seventh finding, i.e., these flights are operated in 𝑆𝑅𝐻𝐷 and 𝑆𝑅𝐻
𝐴 sectors,
which belong to short-range flights, whereas the remaining flights are operated in the
𝑆𝑅𝐻𝑈𝑆𝐼, 𝑆𝑅𝑈𝑆1
𝐻 , 𝑆𝑅𝑈𝑆2𝐻 , 𝑆𝑅𝑈𝐾
𝐻 , 𝑆𝑅𝐻𝑈𝑆2, and 𝑆𝑅𝐻
𝑈𝐾 sectors and belong to long-range flights on
long-haul routes. The large portion of data belongs to the long-range route flights. This
forces NN-based algorithms to determine network connection weights by considering
long-range route flights rather than short-range route flights. This is the main reason for
which it is hard for BPNNs to truly approximate the complex operational parameters and
their data instances. It can be easily visualised from Figure 5.1 that the BPNN estimation
for the mentioned 2000 flights is even worse than both AEA and CPCLS. Therefore, to
study the effect of the short-range and long-range route on estimation models, our work is
extended by estimating the trip fuel for each sector individually. The purpose of sector-
wise fuel estimation (individual model) is to study the effect of the extracted operational
parameters of fuel consumed within each sector.
5.4.2.2 Individual models
The types of operational parameters and their data instances have a significant effect on fuel
consumption. For example, an aircraft traveling from airport A to airport B might face
headwinds, and during the return, it might face tailwinds. The difference in both conditions
150
may cause different fuel consumption for the same route. The real data consist of 2658, 1252,
3080, 2493, 3199, 2423, 3116, and 896 flights operated in sectors 𝑆𝑅𝐻𝑈𝑆𝐼, 𝑆𝑅𝐻
𝐷, 𝑆𝑅𝑈𝑆1𝐻 , 𝑆𝑅𝑈𝑆2
𝐻 ,
𝑆𝑅𝑈𝐾𝐻 , 𝑆𝑅𝐻
𝑈𝑆2, 𝑆𝑅𝐻𝑈𝐾, and 𝑆𝑅𝐻
𝐴, respectively. The aircraft flying in sectors 𝑆𝑅𝐻𝑈𝑆𝐼, 𝑆𝑅𝑈𝐾
𝐻 , 𝑆𝑅𝐻𝑈𝑆2,
𝑆𝑅𝐻𝐴 faced headwind compared to sectors 𝑆𝑅𝐻
𝐷, 𝑆𝑅𝑈𝑆1𝐻 , 𝑆𝑅𝑈𝑆2
𝐻 , which faced tailwind. High-
performance aircrafts are operated in sectors 𝑆𝑅𝑈𝑆2𝐻 , 𝑆𝑅𝑈𝐾
𝐻 , 𝑆𝑅𝐻𝑈𝑆2, and 𝑆𝑅𝐻
𝑈𝐾. The short-range
route flights in sectors 𝑆𝑅𝐻𝐷 and 𝑆𝑅𝐻
𝐴 are operated at a lower altitude level compared to long-
range route flights. The flight time varies according to an increase in distance for all sectors,
whereas the mean aerodynamic chord and aircraft speed are more dependent on aircraft
weights. The runway directions for 𝑆𝑅𝐻𝑈𝑆𝐼 are 07, 15, 25, and 33; for 𝑆𝑅𝐻
𝐷, are 12 and 30; for
𝑆𝑅𝑈𝑆1𝐻 are 07 and 25; for 𝑆𝑅𝑈𝑆2
𝐻 are 07 and 25; for 𝑆𝑅𝑈𝐾𝐻 are 07 and 25; for 𝑆𝑅𝐻
𝑈𝑆2 are 06, 07,
24 and 25; for 𝑆𝑅𝐻𝑈𝐾 are 09 and 27; and for 𝑆𝑅𝐻
𝐴 are 03, 06, 21 and 24. Location of more than
one runway with the same directions are differentiated with a letter as follows: L for left, C for
centre, and R for right. A one hot encoding pre-processing technique is applied sector-wise on
the runway direction categorical variable to convert it to a binary vector. This varying
behaviour of operational parameters may significantly influence the accuracy of machine
learning algorithms.
1 Table 5.3 shows the sector-wise trip fuel deviation results for AEA, BPNN, and CPCLS.
The first finding is that the fuel estimation by CPCLS produces fuel deviation MAPEs of
1.11%, 1.30%, 0.95%, 0.70%, 0.80%, 0.76%, 0.88%, and 1.03% compared to AEA fuel
deviation MAPEs of 2.84%, 2.73%, 1.18%, 0.99%, 1.36%, 1.27%, 1.12%, and 1.52%, and
that of BPNN, i.e., 1.21%, 1.38%, 1.13%, 0.85%, 0.90%, 0.78%, 0.93%, and 1.08% for
sectors 𝑆𝑅𝐻𝑈𝑆𝐼, 𝑆𝑅𝐻
𝐷, 𝑆𝑅𝑈𝑆1𝐻 , 𝑆𝑅𝑈𝑆2
𝐻 ,𝑆𝑅𝑈𝐾𝐻 ,𝑆𝑅𝐻
𝑈𝑆2,𝑆𝑅𝐻𝑈𝐾 and 𝑆𝑅𝐻
𝐴, respectively. StDev
measurements show that CPCLS dispersion from mean is less for all sectors compared to
AEA and BPNN.
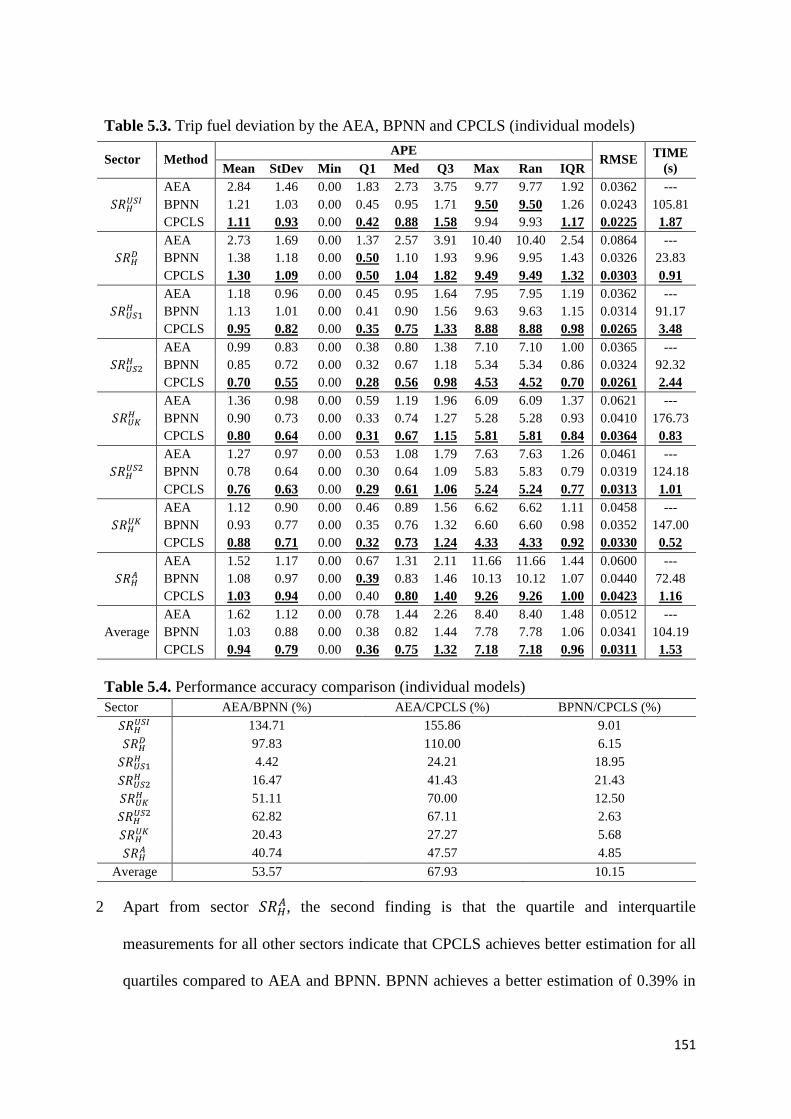
151
2 Apart from sector 𝑆𝑅𝐻𝐴, the second finding is that the quartile and interquartile
measurements for all other sectors indicate that CPCLS achieves better estimation for all
quartiles compared to AEA and BPNN. BPNN achieves a better estimation of 0.39% in
Table 5.3. Trip fuel deviation by the AEA, BPNN and CPCLS (individual models)
Sector Method APE
RMSE TIME
(s) Mean StDev Min Q1 Med Q3 Max Ran IQR
𝑆𝑅𝐻𝑈𝑆𝐼
AEA 2.84 1.46 0.00 1.83 2.73 3.75 9.77 9.77 1.92 0.0362 ---
BPNN 1.21 1.03 0.00 0.45 0.95 1.71 9.50 9.50 1.26 0.0243 105.81
CPCLS 1.11 0.93 0.00 0.42 0.88 1.58 9.94 9.93 1.17 0.0225 1.87
𝑆𝑅𝐻𝐷
AEA 2.73 1.69 0.00 1.37 2.57 3.91 10.40 10.40 2.54 0.0864 ---
BPNN 1.38 1.18 0.00 0.50 1.10 1.93 9.96 9.95 1.43 0.0326 23.83
CPCLS 1.30 1.09 0.00 0.50 1.04 1.82 9.49 9.49 1.32 0.0303 0.91
𝑆𝑅𝑈𝑆1𝐻
AEA 1.18 0.96 0.00 0.45 0.95 1.64 7.95 7.95 1.19 0.0362 ---
BPNN 1.13 1.01 0.00 0.41 0.90 1.56 9.63 9.63 1.15 0.0314 91.17
CPCLS 0.95 0.82 0.00 0.35 0.75 1.33 8.88 8.88 0.98 0.0265 3.48
𝑆𝑅𝑈𝑆2𝐻
AEA 0.99 0.83 0.00 0.38 0.80 1.38 7.10 7.10 1.00 0.0365 ---
BPNN 0.85 0.72 0.00 0.32 0.67 1.18 5.34 5.34 0.86 0.0324 92.32
CPCLS 0.70 0.55 0.00 0.28 0.56 0.98 4.53 4.52 0.70 0.0261 2.44
𝑆𝑅𝑈𝐾𝐻
AEA 1.36 0.98 0.00 0.59 1.19 1.96 6.09 6.09 1.37 0.0621 ---
BPNN 0.90 0.73 0.00 0.33 0.74 1.27 5.28 5.28 0.93 0.0410 176.73
CPCLS 0.80 0.64 0.00 0.31 0.67 1.15 5.81 5.81 0.84 0.0364 0.83
𝑆𝑅𝐻𝑈𝑆2
AEA 1.27 0.97 0.00 0.53 1.08 1.79 7.63 7.63 1.26 0.0461 ---
BPNN 0.78 0.64 0.00 0.30 0.64 1.09 5.83 5.83 0.79 0.0319 124.18
CPCLS 0.76 0.63 0.00 0.29 0.61 1.06 5.24 5.24 0.77 0.0313 1.01
𝑆𝑅𝐻𝑈𝐾
AEA 1.12 0.90 0.00 0.46 0.89 1.56 6.62 6.62 1.11 0.0458 ---
BPNN 0.93 0.77 0.00 0.35 0.76 1.32 6.60 6.60 0.98 0.0352 147.00
CPCLS 0.88 0.71 0.00 0.32 0.73 1.24 4.33 4.33 0.92 0.0330 0.52
𝑆𝑅𝐻𝐴
AEA 1.52 1.17 0.00 0.67 1.31 2.11 11.66 11.66 1.44 0.0600 ---
BPNN 1.08 0.97 0.00 0.39 0.83 1.46 10.13 10.12 1.07 0.0440 72.48
CPCLS 1.03 0.94 0.00 0.40 0.80 1.40 9.26 9.26 1.00 0.0423 1.16
Average
AEA 1.62 1.12 0.00 0.78 1.44 2.26 8.40 8.40 1.48 0.0512 ---
BPNN 1.03 0.88 0.00 0.38 0.82 1.44 7.78 7.78 1.06 0.0341 104.19
CPCLS 0.94 0.79 0.00 0.36 0.75 1.32 7.18 7.18 0.96 0.0311 1.53
Table 5.4. Performance accuracy comparison (individual models)
Sector AEA/BPNN (%) AEA/CPCLS (%) BPNN/CPCLS (%)
𝑆𝑅𝐻𝑈𝑆𝐼 134.71 155.86 9.01
𝑆𝑅𝐻𝐷 97.83 110.00 6.15
𝑆𝑅𝑈𝑆1𝐻 4.42 24.21 18.95
𝑆𝑅𝑈𝑆2𝐻 16.47 41.43 21.43
𝑆𝑅𝑈𝐾𝐻 51.11 70.00 12.50
𝑆𝑅𝐻𝑈𝑆2 62.82 67.11 2.63
𝑆𝑅𝐻𝑈𝐾 20.43 27.27 5.68
𝑆𝑅𝐻𝐴 40.74 47.57 4.85
Average 53.57 67.93 10.15
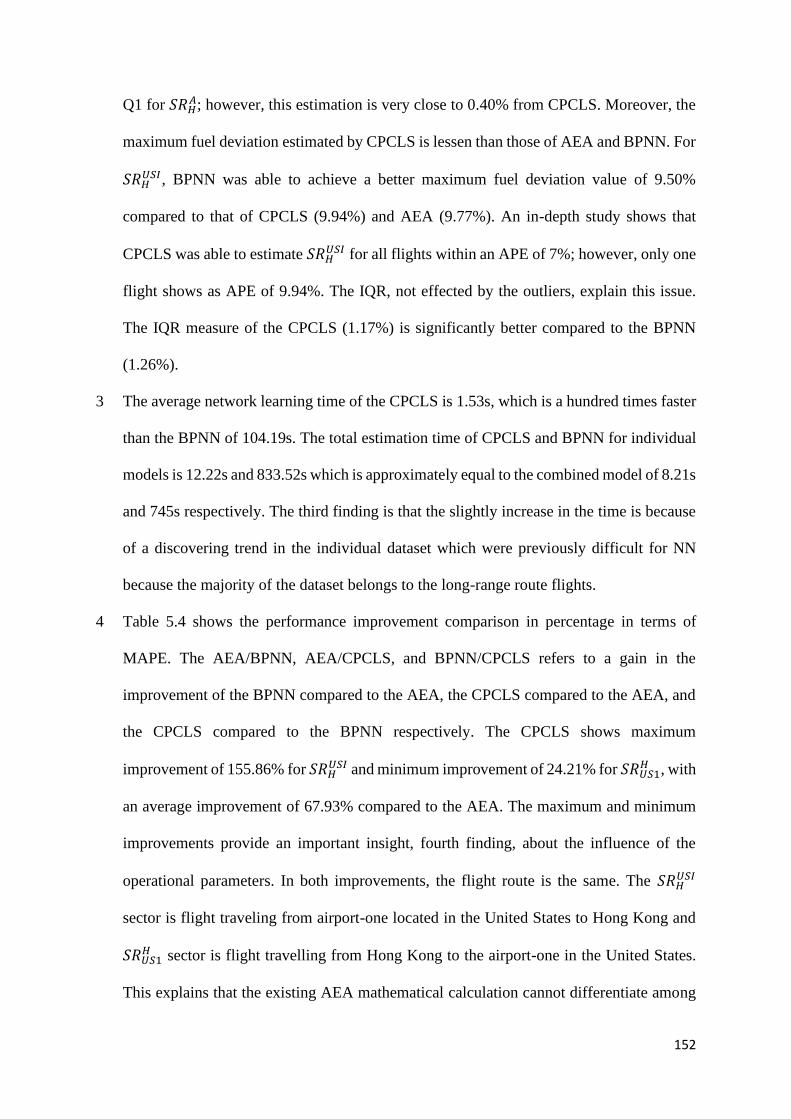
152
Q1 for 𝑆𝑅𝐻𝐴; however, this estimation is very close to 0.40% from CPCLS. Moreover, the
maximum fuel deviation estimated by CPCLS is lessen than those of AEA and BPNN. For
𝑆𝑅𝐻𝑈𝑆𝐼, BPNN was able to achieve a better maximum fuel deviation value of 9.50%
compared to that of CPCLS (9.94%) and AEA (9.77%). An in-depth study shows that
CPCLS was able to estimate 𝑆𝑅𝐻𝑈𝑆𝐼 for all flights within an APE of 7%; however, only one
flight shows as APE of 9.94%. The IQR, not effected by the outliers, explain this issue.
The IQR measure of the CPCLS (1.17%) is significantly better compared to the BPNN
(1.26%).
3 The average network learning time of the CPCLS is 1.53s, which is a hundred times faster
than the BPNN of 104.19s. The total estimation time of CPCLS and BPNN for individual
models is 12.22s and 833.52s which is approximately equal to the combined model of 8.21s
and 745s respectively. The third finding is that the slightly increase in the time is because
of a discovering trend in the individual dataset which were previously difficult for NN
because the majority of the dataset belongs to the long-range route flights.
4 Table 5.4 shows the performance improvement comparison in percentage in terms of
MAPE. The AEA/BPNN, AEA/CPCLS, and BPNN/CPCLS refers to a gain in the
improvement of the BPNN compared to the AEA, the CPCLS compared to the AEA, and
the CPCLS compared to the BPNN respectively. The CPCLS shows maximum
improvement of 155.86% for 𝑆𝑅𝐻𝑈𝑆𝐼 and minimum improvement of 24.21% for 𝑆𝑅𝑈𝑆1
𝐻 , with
an average improvement of 67.93% compared to the AEA. The maximum and minimum
improvements provide an important insight, fourth finding, about the influence of the
operational parameters. In both improvements, the flight route is the same. The 𝑆𝑅𝐻𝑈𝑆𝐼
sector is flight traveling from airport-one located in the United States to Hong Kong and
𝑆𝑅𝑈𝑆1𝐻 sector is flight travelling from Hong Kong to the airport-one in the United States.
This explains that the existing AEA mathematical calculation cannot differentiate among
153
the varying behaviour of operational parameters. The use of global parameters for the both
Figure 5.3. Fuel deviation (𝑆𝑅𝐻
𝑈𝑆𝐼)
Figure 5.4. Fuel deviation (𝑆𝑅𝐻
𝐷)
Figure 5.5. Fuel deviation (𝑆𝑅𝑈𝑆1
𝐻 )
154
sectors of the same route rather than local parameters with the old database in mathematical
Figure 5.6. Fuel deviation (𝑆𝑅𝑈𝑆2
𝐻 )
Figure 5.7. Fuel deviation (𝑆𝑅𝑈𝐾
𝐻 )
Figure 5.8. Fuel deviation (𝑆𝑅𝐻
𝑈𝑆2)
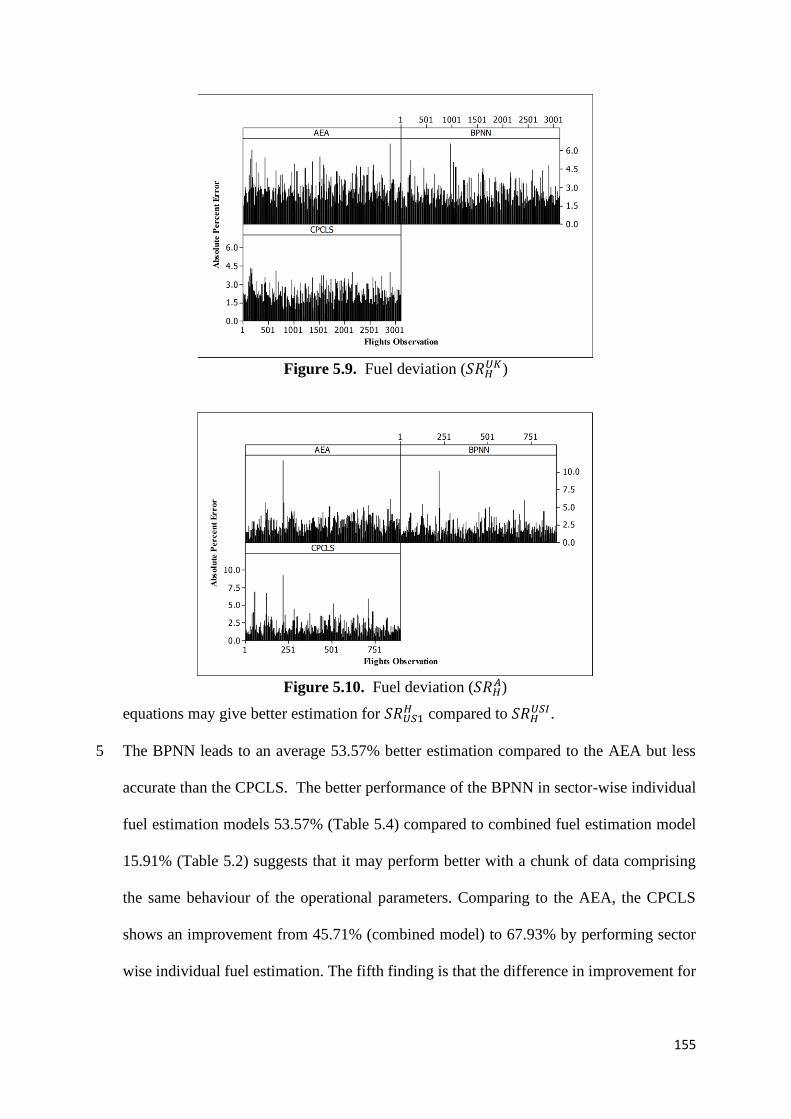
155
equations may give better estimation for 𝑆𝑅𝑈𝑆1𝐻 compared to 𝑆𝑅𝐻
𝑈𝑆𝐼.
5 The BPNN leads to an average 53.57% better estimation compared to the AEA but less
accurate than the CPCLS. The better performance of the BPNN in sector-wise individual
fuel estimation models 53.57% (Table 5.4) compared to combined fuel estimation model
15.91% (Table 5.2) suggests that it may perform better with a chunk of data comprising
the same behaviour of the operational parameters. Comparing to the AEA, the CPCLS
shows an improvement from 45.71% (combined model) to 67.93% by performing sector
wise individual fuel estimation. The fifth finding is that the difference in improvement for
Figure 5.9. Fuel deviation (𝑆𝑅𝐻
𝑈𝐾)
Figure 5.10. Fuel deviation (𝑆𝑅𝐻
𝐴)
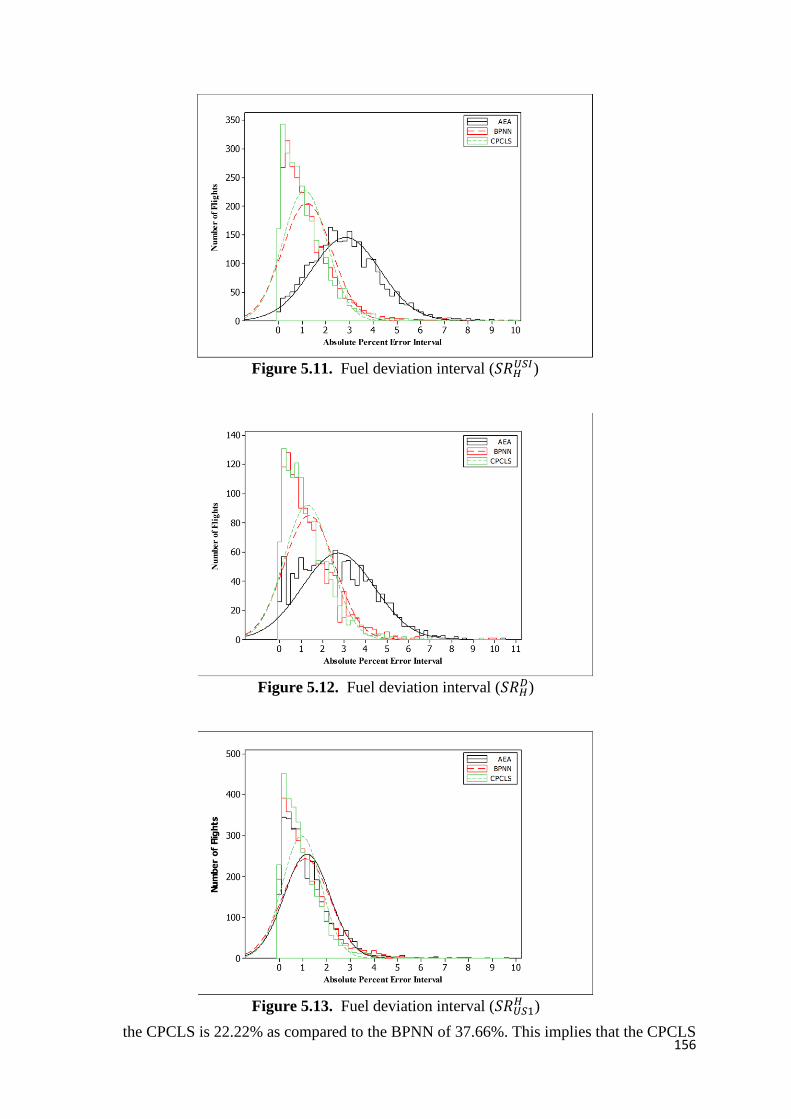
156
the CPCLS is 22.22% as compared to the BPNN of 37.66%. This implies that the CPCLS
Figure 5.11. Fuel deviation interval (𝑆𝑅𝐻
𝑈𝑆𝐼)
Figure 5.12. Fuel deviation interval (𝑆𝑅𝐻
𝐷)
Figure 5.13. Fuel deviation interval (𝑆𝑅𝑈𝑆1
𝐻 )
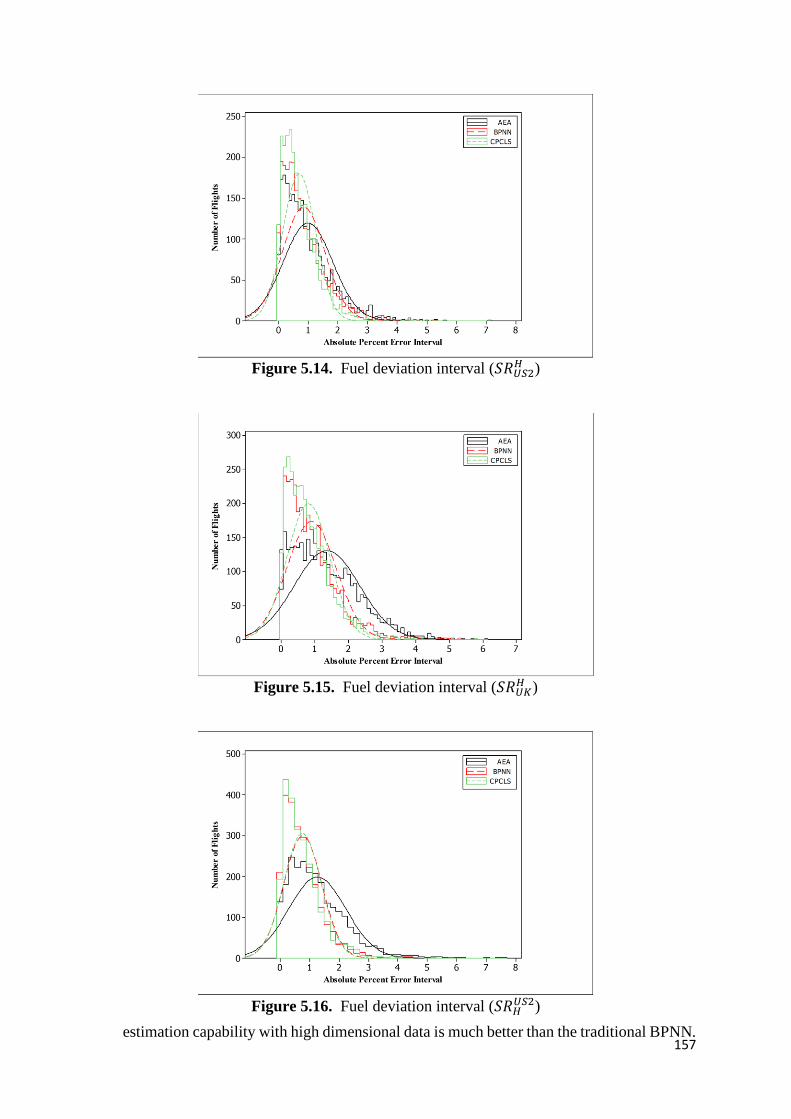
157
estimation capability with high dimensional data is much better than the traditional BPNN.
Figure 5.14. Fuel deviation interval (𝑆𝑅𝑈𝑆2
𝐻 )
Figure 5.15. Fuel deviation interval (𝑆𝑅𝑈𝐾
𝐻 )
Figure 5.16. Fuel deviation interval (𝑆𝑅𝐻
𝑈𝑆2)
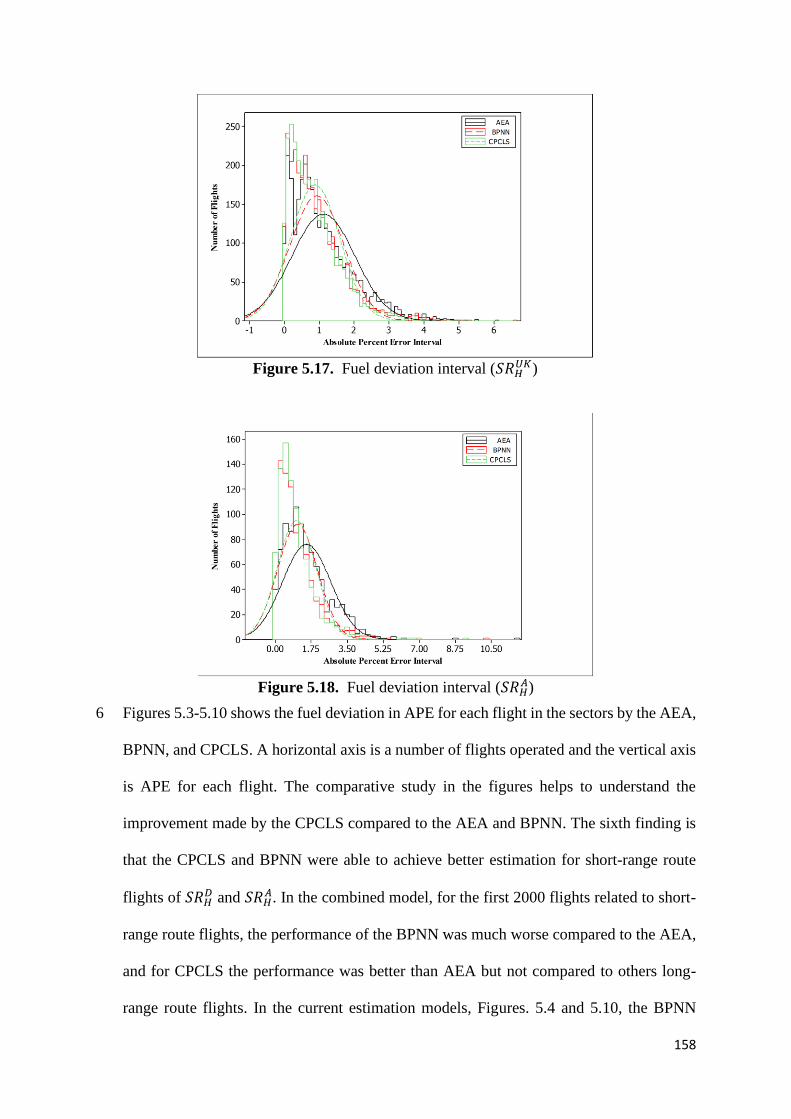
158
6 Figures 5.3-5.10 shows the fuel deviation in APE for each flight in the sectors by the AEA,
BPNN, and CPCLS. A horizontal axis is a number of flights operated and the vertical axis
is APE for each flight. The comparative study in the figures helps to understand the
improvement made by the CPCLS compared to the AEA and BPNN. The sixth finding is
that the CPCLS and BPNN were able to achieve better estimation for short-range route
flights of 𝑆𝑅𝐻𝐷 and 𝑆𝑅𝐻
𝐴. In the combined model, for the first 2000 flights related to short-
range route flights, the performance of the BPNN was much worse compared to the AEA,
and for CPCLS the performance was better than AEA but not compared to others long-
range route flights. In the current estimation models, Figures. 5.4 and 5.10, the BPNN
Figure 5.18. Fuel deviation interval (𝑆𝑅𝐻
𝐴)
Figure 5.17. Fuel deviation interval (𝑆𝑅𝐻
𝑈𝐾)
159
achieves better estimation than the AEA, and the CPCLS achieves better estimation
compared to both AEA and BPNN. Similarly, for all other sectors, Figures 5.3, 5.5-5.9,
the APE of each flights shows better results for the CPCLS compared to the AEA and
BPNN.
7 As mentioned earlier that sector 𝑆𝑅𝐻𝑈𝑆𝐼 and 𝑆𝑅𝑈𝑆1
𝐻 follow the same route but travel in the
opposite direction. Comparative study of Figure 5.3 and 5.5, shows that the AEA estimated
APE for flights is much higher for 𝑆𝑅𝐻𝑈𝑆𝐼 (MAPE 2.84%) compared to 𝑆𝑅𝑈𝑆1
𝐻 (MAPE
1.18%). The reason is using the same global parameter for both sectors rather than local
parameters. Based on historical data, the seventh finding is that the CPCLS minimized this
issue and shows APE for both sectors (Figures 5.3 and 5.5) almost identical. For other
sectors having the same route, for instance 𝑆𝑅𝐻𝑈𝑆2,𝑆𝑅𝑈𝑆2
𝐻 and 𝑆𝑅𝑈𝐾𝐻 , 𝑆𝑅𝐻
𝑈𝐾, the figures show
the same issue of usage of global hyperparameter and old database by the AEA. The 𝑆𝑅𝐻𝑈𝑆2
shows higher APE compared to 𝑆𝑅𝑈𝑆2𝐻 , and 𝑆𝑅𝑈𝐾
𝐻 shows higher APE compared to 𝑆𝑅𝐻𝑈𝐾.
This demonstrates the main limitation, as highlighted in the literature review Chapter 2, of
the EA based methods.
8 Figures 5.11- 5.18 shows the histogram and distribution comparison of the AEA, BPNN,
and CPCLS. The histograms indicate that the CPCLS fuel deviation is spread on less APE
bins with a major focus on estimating flights contributing to less deviation bins. For most
sectors, the eighth finding is that the distribution of CPCLS is more clustered as compared
to the AEA and BPNN. For instance, in Figures 5.11 and 5.12, the bell shape of 𝑆𝑅𝐻𝑈𝑆𝐼 and
𝑆𝑅𝐻𝐷 sectors show that the AEA method fuel deviation exists mainly in the bins 1.50-
3.50%, whereas, the CPCLS distribution peak shape shows that the fuel deviation exists in
0.00-1.00%. In Figures 5.13, 5.16, 5.18 for 𝑆𝑅𝑈𝑆1𝐻 , 𝑆𝑅𝐻
𝑈𝑆2, 𝑆𝑅𝐻𝐴, the distribution of BPNN
is almost identical to the AEA or CPCLS. For all sectors, the histogram and distribution
trend of the CPCLS illustrates that it attempts to estimate trip fuel for flights with less
160
deviation compared to the AEA and BPNN. The histogram and distribution of the AEA
show much dispersed fuel deviation. The possible reason for the AEA high fuel deviation
is less confidence in method because of the availability and applicability of global
parameters rather than the local parameters.
5.5 Summary
The experimental work demonstrates the effectiveness of the CPCLS. The estimation of the
CPCLS results in a fuel deviation mean absolute error percentage (MAPE) of 1.05% and 0.94%
with an improvement of 45.71% and 67.93%, and BPNN estimated fuel with a deviation of
1.32% and 1.03% with an improvement of 15.91% and 53.57% compared to the AEA fuel
deviation of 1.53% and 1.62% for combined and individual models respectively. In comparison
with the BPNN, the CPCLS achieved an improvement of 25.71% and 10.15% for combined
and individual models respectively. Similarly, CPCLS trained the network a hundred times
faster compared to the traditional BPNN. In the CPCLS, the analytical calculation of
connection weights by eigendecomposition of the input covariance squares matrix tries to
generate linearly independent hidden units explaining the maximum variance in the operational
parameters. The eigendecomposition eliminates a problem of linear dependence of operational
parameters and the hidden units. These characteristics make it more suitable to accurately
estimate trip fuel with less expertise requirement and faster learning speed. Sector-wise
(individual) fuel estimation models validate the earlier work of fuel estimation by the BPNN
with a limited amount of data operational parameters and flights, divided among different flight
phases. However, during the study, it is observed that the estimation accuracy of the BPNN
starts decreasing with an increase in the data structure. The varying nature of the operational
parameter behavior made it difficult for the BPNN to create hidden units with the capability of
operational parameters linearly separable. The sole purpose of this work is not a comparison

161
of the CPCLS with AEA and BPNN. The main contribution is to propose and apply the self-
organizing CNN algorithm that gives better estimation accuracy with less expertise
requirement and faster learning speed. The significant improvement of 67.93% by the proposed
CPCLS method in existing airline fuel estimation (i.e., AEA) will directly benefit in
eliminating excess fuel consumption.
162
Chapter 6. Conclusion and Future Work
6.1 Conclusion
This work addresses airline trip fuel deviation from estimated values, which results in excessive
fuel consumption. Accurate fuel estimation is crucial for airlines to ensure safety and
profitability. Nowadays, the aviation industry is growing at a significant rate and improvement
in various operations can ensure long term sustainability. Among various operating expenses,
fuel cost contributes to an average 28.2% which makes it more valuable to design a method
that may accurately estimate fuel for each flight journey. It has been noticed that fuel
consumption demand is increasing each year. The forecasted demand was to reach 97 billion
gallons in 2019 compared to the level of 2006 because of an increase in demand of passengers
and cargos. These promising economic opportunities may become a threat if airlines are unable
to handle problems of increase in jet fuel prices and international authorities regulations to
protect environmental degradation. It was forecasted that jet fuel prices will increase by 31.18%
in 2019 compared to the 2015 level. Besides, to protect environmental degradation and avoid
ozone depletion, international authorities stress to reduce CO2 emissions by 50% by 2050 with
respect to 2005 and reduce fuel consumption 1.5% per year. In the future, international
authorities are planning to make it compulsory for airlines to certify their aircraft based on size
and weight, according to CO2 certification standards. The growing demand with high fuel
prices and increasing awareness for environmental protection are encouraging airlines to adopt
competitive strategies in fuel management to control excess fuel consumption for long-term
sustainability.
163
In the existing literature, the efforts made by researchers to address the fuel estimation problem
are noteworthy. However, there are still some research gaps that need considerable attention.
The research gaps are concisely summarized as follows:
1 The most popular fuel estimation methods that are currently in practice by various
airlines are based on energy balance mathematical formulation. It is identified that the
actual performance of aircraft usually deviates from such estimation. The EAs need
information about many coefficients to determine the amount of fuel needed for each
journey. Firstly, the information about coefficients is not always available in a real
scenario and a lot of flight testing is needed to perform to generate such information.
This makes the method expensive to adopt. Secondly, the unavailability of such
information may lead to the use of global parameters with default values rather than
local parameters which may result in inaccurate estimation. In current literature, an
insufficient attempt has been made to study the effect of using global parameters on the
deviation of fuel from estimation using a practical example.
2 The popularity of the application of machine learning NNs in the aviation sector to
improve various operations is significant. The BPNN based fuel estimation was
proposed to provide an alternative to EAs. A pitfall is that BPNN is a fixed topology
NN and adjustment of various hyperparameters is based on human expertise. The
BPNN drawbacks of trial and error experimental work to determine network and
convergence at local minima may not assure that the selected network is optimal
causing weak generalization performance and slow convergence. In existing works,
BPNN is applied to estimate fuel without addressing the above key issues.
3 In the existing literature, the operational parameters are selected based on prior
experience and knowledge. There may exist some operational parameters that may also
contribute to fuel consumption and are unnoticed. BPNN based fuel estimation models
164
are learned on low-level operational parameters with the future recommendation of
incorporating more parameters. In literature, the research gap still exists to incorporate
high-level operational parameters that are previously ignored.
4 Likewise, EAs and BPNNs, many other models are proposed to estimate fuel for
distinct flight phases. The cumulative effect of distinct phases to estimate fuel for the
complete journey may even lead to higher fuel deviation. Therefore, it is important to
have a model that can efficiently estimate fuel for all phases collectively to ensure
profitability and safety.
5 The trained NN performance may no longer be suitable for learning the same
application if data structure and size changes. How to improve the machine learning
NNs that give the same performance regardless of change is data structure and size is
gaining significant consideration.
To address the above research gaps, we conducted our work in three main stages to achieve
three objectives discussed in Chapter 1, Section 1.3. The first stage is discussed in Chapter 3,
in which we discussed the framework and model is formulated to achieve an objective function
of minimizing fuel deviation. The significance of the proposed work and its relationship to
existing methods is constructed to understand the purpose and need of the work. Chapter 3
mainly addresses the first four research gaps. The second stage is discussed in Chapter 4, in
which novel CNN is proposed to avoid trial and error experimental work by analytically
calculating connection weights with improved cascade architecture. This chapter mainly
addresses research gaps second and fifth. The third stage is discussed in Chapter 5, in which
comparative study among proposed CPCLS, AEA and BPNN is performed. The chapter
provides important managerial insight and mainly addresses all research gaps.
165
In Chapter 3, prior to formulating model and defining an objective function, a framework of
fuel consumption and its deviation from estimation problem, and useful operational parameters
that can contribute to fuel consumption are explained. The problem of fuel deviation arises
because of the inappropriate selection of estimation methods and operational parameters. Low
confidence in existing estimation methods results in adding more fuel in discrepancy reservoirs
other than contingency and supplementary reservoirs to ensure a smooth journey. This
ultimately increases the total weight of the aircraft and results in more fuel consumption. This
problem is known as overestimation and concern profitability issues. Also, loading suboptimal
fuel, known as underestimation, may concern safety issues. Therefore, the objective of reaching
a designation airport with minimal deviation cannot be achieved. The methods used for
estimating fuel consumption are mainly divided into two types: the mathematical method and
data-driven method. Mathematical methods are advantageous that they provide the physical
understanding of the system, however, according to the recent studies many challenges exist in
real practice. The mathematical methods need a lot of information to define the relationship
among variables, difficult to study system non-linearities, and need expert involvement.
Machine learning data-driven methods are considered a viable tool for discovering hidden
patterns or information from historical data. Among many machine learning algorithms, NNs
are generally favorable because of their universal approximation capability. However, existing
BPNN based fuel estimation models are limited in scope by considering low-level operational
parameters with few aircraft types with the future recommendation of incorporating high-level
operational parameters. The reason for this is low generalization performance and slow
convergence drawbacks of BPNN. Moreover, it requires much human intervention to decide
and adjust hyperparameters. In addition, selecting operational parameters based on prior
experience or knowledge and using global values may consequence in inaccurate results. In
this chapter, a trip fuel estimation model is formulated by considering the first four research
166
gaps. The useful operational parameters representing historical real data that can contribute to
fuel consumption are extracted and added to the model. The objective function of minimizing
fuel deviation is defined. Rather than estimating fuel for distinct phases, the model is based on
estimating fuel for all phases collectively.
In Chapter 4, a novel self-organizing CNN is proposed. The objective is to improve the
performance of the estimation model with less expertise involvement and obtain results with
fast learning speed. A comprehensive review of FNNs was conducted (Chapter 2, Section 2.2)
to understand the merits and limitations along with applications of various algorithms. Based
on three decades of review of FNN, we classified the literature into six categories. Those six
categories are gradient learning algorithms, gradient-free learning algorithms, optimization
algorithms for learning rate, bias and variance (Underfitting and Overfitting) minimization
algorithms, constructive topology FNN, and metaheuristic search algorithms. Following the
literature review, we identified some research gaps in the existing FNNs. Those research gaps
are studying the effect of activation functions, designing efficient and compact algorithm with
fewer hyperparameters, analytically calculating connection weights rather than a random
generation and gradient optimization, change in a data structure, eliminating the need for data
pre-processing and transformation, adopting a hybrid approach for real-world applications, and
determining analytically a number of hidden units. Inspired from the gradient-free learning
algorithms (Chapter 2, Subsection 2.2.3.2) having the property of calculating analytically
output connection weights and the constructive topology FNN (Chapter 2, Subsection 2.2.4.3)
having the property of adding hidden units in the hidden layer, we proposed new algorithm.
Efforts were also made to address two research gaps of “calculating connection weights rather
than a random generation and gradient optimization” and “change in data structure” in the
proposed algorithm. Combining the concept of two categories and two research gaps result in
a novel algorithm named as cascade principal component least squares (CPCLS) neural
167
network. The characteristics of CPCLS is that it analytically determines connection weights
rather than gradient or random generation and add multiple linearly independent hidden units
in the hidden layer to improve and make convergence faster. Experimental work was conducted
on artificial benchmarking and real-world problems to demonstrate the superiority of CPCLS.
The work shows that proposed CPCLS achieved better generalization performance and faster
learning speed compared to other known NNs, such as CasCor, BPNN, SaELM, OLSCN, and
FCNN. The theoretical justification and experimental work demonstrated that hidden units
generated in the hidden layer, and connecting only newly added last hidden layer to output
layer ensures maximum convergence.
In chapter 5, the novel CPCLS is applied to the fuel estimation model to achieve the objective
function of minimal fuel deviation and reduce the negative role of global parameters and
varying operational parameters on fuel consumption. The purpose was to eliminate the need
for a trial-and-error approach and reduce the number of hyperparameter adjustments and expert
involvement. We consider that insufficient attempts have been reported in the literature
concerning the estimation of trip fuel using CNNs along with high-dimensional data for the
entire trip flight phases collectively. A comparative study with the existing AEA and a
traditional BPNN to estimate trip fuel prove that our work is unique in studying the sectors
both in combination and individually by considering all flight phases as a complete flight trip.
Unlike AEA and BPNN, the proposed CPCLS does not require complex mathematical
formulation, a trial-and-error approach, gradient derivative techniques, or too many
hyperparameter initializations. This makes it superior to estimate trip fuel accurately with fewer
expertise requirements and faster learning speed. Previously, the entire trip was divided into
different flight phases, namely takeoff, climb, cruise, descent, and approach, to propose a fuel
estimation model with limited flight data restricted to a small number of aircraft or generated
by a simulation planner. In our study, we analyzed high-dimensional data associated with 107
168
wide-body aircrafts ̶ Airbus A330-300 (31 aircrafts) and Boeing 747-400 (9 aircrafts)/747-
800 (14 aircrafts)/777-300 (53 aircrafts) ̶ that operated a total of 19,117 real international
passenger and cargo flights in eight sectors over two years. Comparative study results
demonstrate that the trip fuel estimation by the proposed CPCLS achieves better results while
requiring the shortest time compared to AEA and BPNN. The CPCLS exhibits an average
improvement of 45.71% and 25.71% for a combined eight-sector model, and 67.93% and
10.15% for a sector-wise individual model, compared to AEA and BPNN, respectively. The
significant improvement in trip fuel estimation creates greater confidence in the proposed
CPCLS given that it may eliminate the need for adding more fuel-based solely on experience.
In summary, educationally, the experimental work on the varying nature of operational
parameters and high dimensionality of data demonstrates the effectiveness of CPCLS, which,
with low fuel deviation and more stable results, demonstrates that can be effectively employed
for estimating trip fuel for each flight. The better and faster estimation results of the self-
organizing CPCLS is because of its analytical calculation of network connection weights
explaining maximum variance in the operational parameters. Thus, CPCLS is a promising
machine learning tool for estimating flight trip fuel. In practical applications, the proposed
CPCLS will be beneficial to airlines by accurately planning the amount of flight trip fuel. This
may avoid the need for extra fuel to be loaded in the aircraft and helps in better management
control. Flight planners and pilots will be more confident with trip fuel estimation and will
avoid the requirement for extra fuel in the discrepancy tank. The weight of aircraft will
decrease, which will not only reduce fuel consumption but also will increase the lifetime of the
engines. The flight planner may suggest and select a suitable airways route by simulating
different combinations of operational parameters to reach the destination with fewer fuel
requirements. Furthermore, controlling excess fuel consumption may benefit in contributing to
less environmental pollution, preventing the scarce jet fuel from natural resources from being
169
wasted, as well as surviving with growing fuel prices, less unplanned aircraft maintenance,
fewer fuel surcharges, and more competitiveness by fulfilling the demand of passengers and
cargo.
6.2 Future Work
This work has addressed the problem of fuel deviation by formulating a model and proposing
a novel CNN. However, there are still some limitations that need to be addressed in future
work. Several important research directions are summarized as:
1. In this work, our main focus was to minimize the fuel deviation by accurately estimating
trip fuel. The work is about predictive analytics that mainly addresses the fuel
estimation and deviation problem. How to identify the alternative routes having less
fuel requirement shall be addressed in the future by performing prescriptive analytics.
The formulated model in Chapter 3 can be extended to estimate aircraft horizontal and
vertical trajectories along with trip fuel estimation. Initial prediction of trajectories by
machine learning and further optimization by mathematical modelling or reinforcement
learning may help to discover alternative routes having less fuel requirement. Currently,
airlines follow the routes as per international guidelines. Identifying the alternative
routes having less fuel requirement may facilitate airlines for making long term
contingency plans.
2. In Chapter 4, OLT was achieved by the eigendecomposition of the covariance
symmetric matrix. Other than the covariance matrix, correlation and single value
decomposition methods can also be applied to achieve OLT. Besides, the experimental
work was performed by considering only the popular sigmoid activation function.
Future direction is to consider other OLT methods and activation functions and study
170
their effects on the performance and learning speed of novel CPCLS. Additionally, its
consequence on trip fuel estimation needs to explore in the future.
3. In Chapter 5, CPCLS is compared to AEA in terms of fuel deviation, whereas its
comparison with BPNN is in terms of both fuel deviation and learning speed. The
computational time for AEA was not considered because the information was not
available in the historical dataset provided by the airline. How much CPCLS is
computational better than AEA is still unclear. This is the main practical limitations in
applying the proposed fuel estimation model in the airline industry. The computational
comparison between CPCLS and AEA maybe explore in the future to facilitate airlines
operating companies in understanding the true benefits of the proposed algorithm.
In addition to the above research directions, some new research directions were identified in
Chapter 2 Section 2.3 to add a contribution to the existing FNNs literature. The research
directions are summarized as:
1. Activation function: Few attempts have been made to study the effect of using various
types of activation functions on FNN. Karlik and Olgac (2011) made a comparison of
popular activation functions including uni-polar sigmoid, bi-polar sigmoid, tangent
hyperbolic, radial bias function and conic section function along with gradient-based
algorithms for fixed topology FNN. The limitation of this experimental work was in
using 10 hidden units and 40 hidden units with 100 iterations and 500 iterations
respectively. Moreover, the data structure, normalization techniques, learning
algorithms, and hyperparameters were not clearly stated in the experimental work. The
experimental results demonstrated that tangent hyperbolic activation function
performance is better than the others. However, it can be observed in various studies
that the sigmoid activation function application is more common compared to tangent
171
hyperbolic function. The importance of hidden units and their activation functions is
clear and is used in every type of FNN. The studies of various activation functions
performance based on fixed and constructive topology, along with gradient algorithms
and gradient-free algorithms, still need researcher attention.
2. Efficient and compact Algorithm with fewer hyperparameters: The gradient learning
algorithms are favorable because of compact size, whereas, gradient-free learning
algorithms are favorable because of gradient-free learning and fast convergence. The
gradient-free algorithms network size becomes much larger which increases its
complexity and the chance of overfitting increases. The best FNN may be considered
to be one having the characteristics of compact architecture with a small number of
hidden units and connection weights. It may analytically calculate hidden units and
connection weights, need fewer hyperparameters and reaches a global minimum in less
training time. There is always a trade-off between network generalization performance
and learning speed. Some algorithms have the advantage of being more efficient than
others but may be constrained by memory requirements, complex architecture, and/or
more learning time. Therefore, more efforts are needed to construct efficient and fast
algorithms with fewer hyperparameters, that are computationally simple and have a
compact size.
3. Eliminating the need for data pre-processing and transformation: Better results of
machine learning algorithms are highly dependent on data pre-processing and the
transformation steps. In pre-processing, various algorithms/techniques are adapted to
clean data to reduce noise, outliers, and missing values, whereas, in transformation,
various algorithms/techniques are adapted to transform the data into formats and forms,
by encoding or standardization, that is appropriate for machine learning. Both steps are
performed prior to feeding data into FNN and are adopted in many algorithms.
172
Insufficient knowledge or inappropriate application of pre-processing and
transformation techniques may cause the algorithm to wrongly conclude the findings.
Future algorithms may be designed that are less sensitive to noise, outliers, missing
values, and do not need a specific form of reducing data features magnitude to a
common scale.
4. A hybrid approach for real-world applications: Researchers demonstrate the
effectiveness of the proposed algorithm either on benchmarking or on real-world
problems or a combination of both. The study of all six categories applications
(Appendix A) gives a clear indication that the interest in researchers proposed
algorithms on real-world problems is rapidly increasing. Traditionally, in 2000 and
earlier, experimental work for demonstrating the effectiveness of proposed algorithms
was limited to artificial benchmarking problems. The possible reasons were the
unavailability of database sources and user reluctance in using FNN. In the literature
survey, it is noticed that nowadays researchers most often use real-world data to ensure
consistency and compare their results with other popular published known algorithms.
Frequently using the same real-world applications data may cause specific data to
become a benchmark. The same issue has been observed in all categories and especially
in the second category. It is important to avoid causing specific data to become a
benchmark because that data may become unsuitable for practical application in the
future with the passage of time. The role of high dimensional, nonlinear, noisy and
unbalanced big data is changing at a rapid rate. The best practice may be to use a hybrid
approach of well-known data in the field along with new data applications during the
comparative study of algorithms. This may increase and maintain user interest in FNN
over the passage of time.
173
5. Hidden units’ analytical calculation: The successful application of learning and
regularization algorithms on complex high dimensional big data application areas,
involving more than 50,000 instances, to improve the convergence of deep neural
networks is noteworthy. The maximum error reduction property of hidden units in deep
neural networks is dependent on connection weights and activation function
determination. More research work is needed to focus on hidden units’ analytical
calculations to avoid the trial and error approach. Calculating the optimal number of
hidden units and connection weights for single or multiple hidden layers in the network,
such that no linear dependence exists may help in achieving better and stable
generalization performance. Similarly, future research work may give clear direction to
users about the application of different activation functions for enhancing business
decisions.
It should be noticed that two other research gaps named “connection weight initialization” and
“data structure” were also identified in Chapter 2 (Section 2.3). This work has addressed both
research gaps to some extent, however, some further improvements are needed to improve
FNNs:
1. Connection weight initialization: In Chapter 2, we explain that existing NNs can be
further strengthened by calculating all connection weights (including input connection
and output connection) analytically to generate hidden units, explaining maximum
variance in the dataset. This may also help to further improve the generalization and
learning speed by compacting the size of the network. From work in Chapter 4, we
concluded that generalization and learning speed has improved, however, the network
size is not compact. How to improve FNNs to make the network compact and avoid
overfitting need further attention in the future.
174
2. Data structure: In Chapter 2, we explain that few attempts have been made to study the
effect of data size and features on FNN algorithms. Future research on designing an
algorithm that can approximate the problem task equally, regardless of data size
(instance) and shape (features), will be a breakthrough achievement. From work in
Chapter 5, we concluded that the difference in improvement for the CPCLS is 22.22%
as compared to the BPNN of 37.66% by changing data from high dimensional to
chunks. This implies that the CPCLS estimation capability with high dimensional data
is much better than the traditional BPNN. The difference in improvement should be on
the lower side. Lower the difference means that algorithm performance on high
dimensional and chunks are approximately similar. CPCLS difference is lower,
however, future research work is needed to further improve FNNs algorithm that may
give a much lower difference.

175
Appendix A. Neural Networks Learning Algorithms and
Optimization Techniques Applications
A.1 Application of gradient learning algorithms
The gradient learning algorithms have gained much attention from researchers compared to
traditional statistical techniques. Gradient learning algorithms help to make a more informed
decision from the available information. Table A.1 highlights some of the applications of
gradient learning algorithms that researchers used to demonstrate the effectiveness of
algorithms during the comparative study. Before the year 2000, the range of real-world
applications appears to be on the low side. The gradient learning algorithms are among the
early attempts that researchers investigated to build FNN. In the early attempt phase, the
possible reason for the unavailability of public real-world application data sources and less
research interest might have forced researchers to rely highly on using artificial benchmarking
data.
The successful application of gradient learning algorithms is dependent on user expertise in
deciding and adjusting the hyperparameters correctly. The major concern of researchers and
users in gradient learning algorithms is to find a method for the network to converge faster. It
is believed that SGD helps to achieve generalization performance many times faster than for
batch learning. Wilson and Martinez (2003) demonstrated that SGD was able to achieve the
required accuracy, on average, 20 times faster compared to batch learning during classifying
real-world problems such as credit card requests, patient diabetes, flower species, beverages
types, religions in the country, crime, voters, and various health diseases. Similarly, while
dealing with problems having more than 1000 instances such as satellite images, shuttle
controls and displaying seven-segment digits, the SGD achieved the required accuracy, on
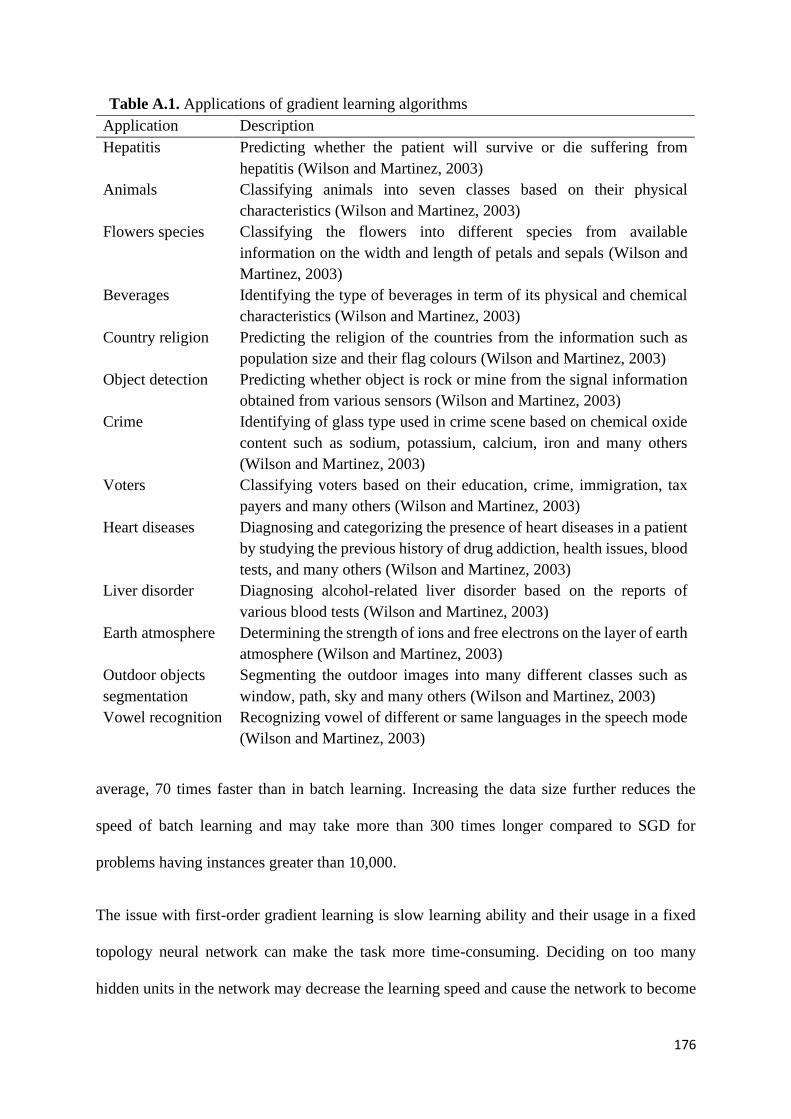
176
average, 70 times faster than in batch learning. Increasing the data size further reduces the
speed of batch learning and may take more than 300 times longer compared to SGD for
problems having instances greater than 10,000.
The issue with first-order gradient learning is slow learning ability and their usage in a fixed
topology neural network can make the task more time-consuming. Deciding on too many
hidden units in the network may decrease the learning speed and cause the network to become
Table A.1. Applications of gradient learning algorithms
Application Description
Hepatitis Predicting whether the patient will survive or die suffering from
hepatitis (Wilson and Martinez, 2003)
Animals Classifying animals into seven classes based on their physical
characteristics (Wilson and Martinez, 2003)
Flowers species Classifying the flowers into different species from available
information on the width and length of petals and sepals (Wilson and
Martinez, 2003)
Beverages Identifying the type of beverages in term of its physical and chemical
characteristics (Wilson and Martinez, 2003)
Country religion Predicting the religion of the countries from the information such as
population size and their flag colours (Wilson and Martinez, 2003)
Object detection Predicting whether object is rock or mine from the signal information
obtained from various sensors (Wilson and Martinez, 2003)
Crime Identifying of glass type used in crime scene based on chemical oxide
content such as sodium, potassium, calcium, iron and many others
(Wilson and Martinez, 2003)
Voters Classifying voters based on their education, crime, immigration, tax
payers and many others (Wilson and Martinez, 2003)
Heart diseases Diagnosing and categorizing the presence of heart diseases in a patient
by studying the previous history of drug addiction, health issues, blood
tests, and many others (Wilson and Martinez, 2003)
Liver disorder Diagnosing alcohol-related liver disorder based on the reports of
various blood tests (Wilson and Martinez, 2003)
Earth atmosphere Determining the strength of ions and free electrons on the layer of earth
atmosphere (Wilson and Martinez, 2003)
Outdoor objects
segmentation
Segmenting the outdoor images into many different classes such as
window, path, sky and many others (Wilson and Martinez, 2003)
Vowel recognition Recognizing vowel of different or same languages in the speech mode
(Wilson and Martinez, 2003)
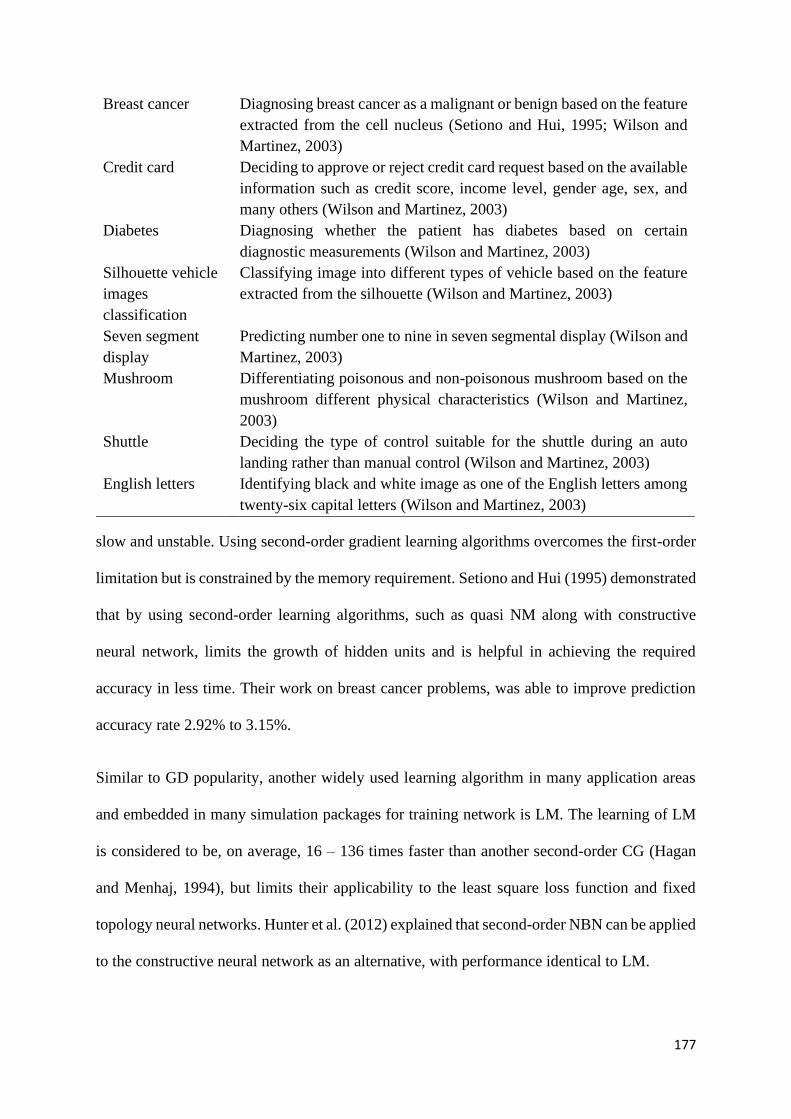
177
slow and unstable. Using second-order gradient learning algorithms overcomes the first-order
limitation but is constrained by the memory requirement. Setiono and Hui (1995) demonstrated
that by using second-order learning algorithms, such as quasi NM along with constructive
neural network, limits the growth of hidden units and is helpful in achieving the required
accuracy in less time. Their work on breast cancer problems, was able to improve prediction
accuracy rate 2.92% to 3.15%.
Similar to GD popularity, another widely used learning algorithm in many application areas
and embedded in many simulation packages for training network is LM. The learning of LM
is considered to be, on average, 16 – 136 times faster than another second-order CG (Hagan
and Menhaj, 1994), but limits their applicability to the least square loss function and fixed
topology neural networks. Hunter et al. (2012) explained that second-order NBN can be applied
to the constructive neural network as an alternative, with performance identical to LM.
Breast cancer Diagnosing breast cancer as a malignant or benign based on the feature
extracted from the cell nucleus (Setiono and Hui, 1995; Wilson and
Martinez, 2003)
Credit card Deciding to approve or reject credit card request based on the available
information such as credit score, income level, gender age, sex, and
many others (Wilson and Martinez, 2003)
Diabetes Diagnosing whether the patient has diabetes based on certain
diagnostic measurements (Wilson and Martinez, 2003)
Silhouette vehicle
images
classification
Classifying image into different types of vehicle based on the feature
extracted from the silhouette (Wilson and Martinez, 2003)
Seven segment
display
Predicting number one to nine in seven segmental display (Wilson and
Martinez, 2003)
Mushroom Differentiating poisonous and non-poisonous mushroom based on the
mushroom different physical characteristics (Wilson and Martinez,
2003)
Shuttle Deciding the type of control suitable for the shuttle during an auto
landing rather than manual control (Wilson and Martinez, 2003)
English letters Identifying black and white image as one of the English letters among
twenty-six capital letters (Wilson and Martinez, 2003)
178
A.2 Application of gradient-free learning algorithms
Many authors have successfully demonstrated the effectiveness of gradient-free learning
algorithms in a wide range of applications, consisting of a variety of applications in the
management, engineering, and health sciences domain. The notable applications include
various areas, but is not limited to, supply chains and logistics, financial analysis, marketing
and sales, management information systems, decision support systems, product and process
improvements, manufacturing cost reduction, business improvements, and health services.
Table A.2 illustrates the range of applications of gradient-free learning algorithms. In the
literature, gradient-free learning algorithms are mostly compared with gradient learning
algorithms by considering the application areas shown in Table A.2. The gradient-free learning
algorithms are relatively new compared to the gradient learning algorithms and are
continuously gaining the attention of researchers.
The gradient learning algorithms disadvantages face a problem of local minimum which can
reduce the generalization performance, and iterative tuning of connection weights may cause
the learning to be more time-consuming. Gradient free learning algorithms are considered to
have faster convergence with more stable results on many application problems. For instance,
the application of the gradient-free learning algorithm (e.g. ELM) on various problems such as
predicting stock prices, house prices, automobile prices, species age, cancer, diabetes drug
compounds, aircraft ailerons and elevators, and adults income found that generalization
performance improves by, on average, 0.12 times with learning speed, on average, 20 times
faster than gradient learning algorithms. Moreover, on large complex problems such as
predicting soil types, segmenting objects, and shuttle control, the ELM improved accuracy, on
average, 6% and achieved prediction a thousand times faster than the gradient learning
algorithms.
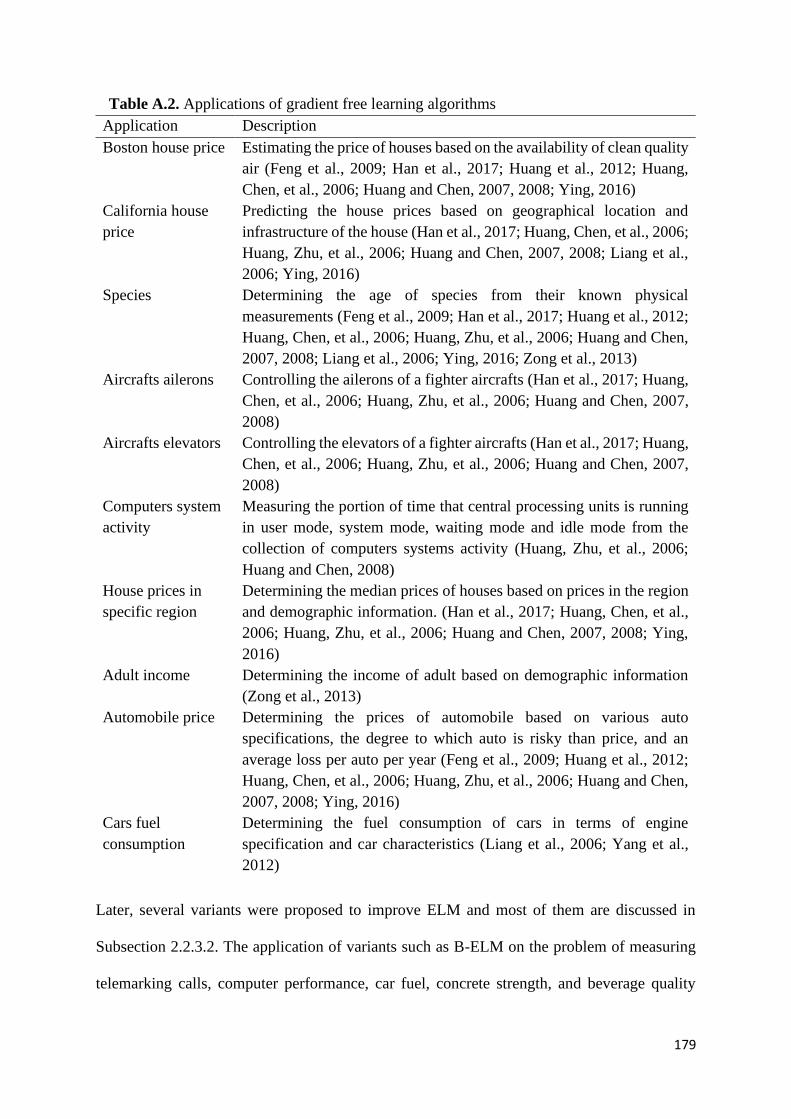
179
Later, several variants were proposed to improve ELM and most of them are discussed in
Subsection 2.2.3.2. The application of variants such as B-ELM on the problem of measuring
telemarking calls, computer performance, car fuel, concrete strength, and beverage quality
Table A.2. Applications of gradient free learning algorithms
Application Description
Boston house price Estimating the price of houses based on the availability of clean quality
air (Feng et al., 2009; Han et al., 2017; Huang et al., 2012; Huang,
Chen, et al., 2006; Huang and Chen, 2007, 2008; Ying, 2016)
California house
price
Predicting the house prices based on geographical location and
infrastructure of the house (Han et al., 2017; Huang, Chen, et al., 2006;
Huang, Zhu, et al., 2006; Huang and Chen, 2007, 2008; Liang et al.,
2006; Ying, 2016)
Species Determining the age of species from their known physical
measurements (Feng et al., 2009; Han et al., 2017; Huang et al., 2012;
Huang, Chen, et al., 2006; Huang, Zhu, et al., 2006; Huang and Chen,
2007, 2008; Liang et al., 2006; Ying, 2016; Zong et al., 2013)
Aircrafts ailerons Controlling the ailerons of a fighter aircrafts (Han et al., 2017; Huang,
Chen, et al., 2006; Huang, Zhu, et al., 2006; Huang and Chen, 2007,
2008)
Aircrafts elevators Controlling the elevators of a fighter aircrafts (Han et al., 2017; Huang,
Chen, et al., 2006; Huang, Zhu, et al., 2006; Huang and Chen, 2007,
2008)
Computers system
activity
Measuring the portion of time that central processing units is running
in user mode, system mode, waiting mode and idle mode from the
collection of computers systems activity (Huang, Zhu, et al., 2006;
Huang and Chen, 2008)
House prices in
specific region
Determining the median prices of houses based on prices in the region
and demographic information. (Han et al., 2017; Huang, Chen, et al.,
2006; Huang, Zhu, et al., 2006; Huang and Chen, 2007, 2008; Ying,
2016)
Adult income Determining the income of adult based on demographic information
(Zong et al., 2013)
Automobile price Determining the prices of automobile based on various auto
specifications, the degree to which auto is risky than price, and an
average loss per auto per year (Feng et al., 2009; Huang et al., 2012;
Huang, Chen, et al., 2006; Huang, Zhu, et al., 2006; Huang and Chen,
2007, 2008; Ying, 2016)
Cars fuel
consumption
Determining the fuel consumption of cars in terms of engine
specification and car characteristics (Liang et al., 2006; Yang et al.,
2012)
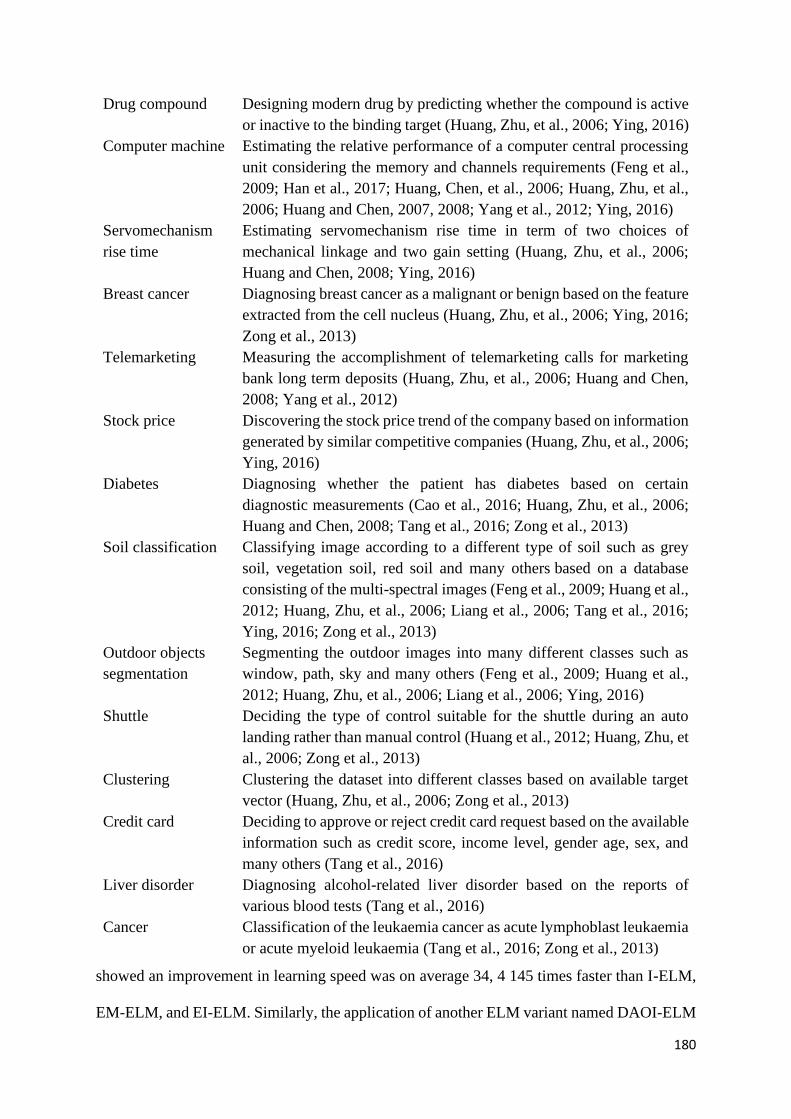
180
showed an improvement in learning speed was on average 34, 4 145 times faster than I-ELM,
EM-ELM, and EI-ELM. Similarly, the application of another ELM variant named DAOI-ELM
Drug compound Designing modern drug by predicting whether the compound is active
or inactive to the binding target (Huang, Zhu, et al., 2006; Ying, 2016)
Computer machine Estimating the relative performance of a computer central processing
unit considering the memory and channels requirements (Feng et al.,
2009; Han et al., 2017; Huang, Chen, et al., 2006; Huang, Zhu, et al.,
2006; Huang and Chen, 2007, 2008; Yang et al., 2012; Ying, 2016)
Servomechanism
rise time
Estimating servomechanism rise time in term of two choices of
mechanical linkage and two gain setting (Huang, Zhu, et al., 2006;
Huang and Chen, 2008; Ying, 2016)
Breast cancer Diagnosing breast cancer as a malignant or benign based on the feature
extracted from the cell nucleus (Huang, Zhu, et al., 2006; Ying, 2016;
Zong et al., 2013)
Telemarketing Measuring the accomplishment of telemarketing calls for marketing
bank long term deposits (Huang, Zhu, et al., 2006; Huang and Chen,
2008; Yang et al., 2012)
Stock price Discovering the stock price trend of the company based on information
generated by similar competitive companies (Huang, Zhu, et al., 2006;
Ying, 2016)
Diabetes Diagnosing whether the patient has diabetes based on certain
diagnostic measurements (Cao et al., 2016; Huang, Zhu, et al., 2006;
Huang and Chen, 2008; Tang et al., 2016; Zong et al., 2013)
Soil classification Classifying image according to a different type of soil such as grey
soil, vegetation soil, red soil and many others based on a database
consisting of the multi-spectral images (Feng et al., 2009; Huang et al.,
2012; Huang, Zhu, et al., 2006; Liang et al., 2006; Tang et al., 2016;
Ying, 2016; Zong et al., 2013)
Outdoor objects
segmentation
Segmenting the outdoor images into many different classes such as
window, path, sky and many others (Feng et al., 2009; Huang et al.,
2012; Huang, Zhu, et al., 2006; Liang et al., 2006; Ying, 2016)
Shuttle Deciding the type of control suitable for the shuttle during an auto
landing rather than manual control (Huang et al., 2012; Huang, Zhu, et
al., 2006; Zong et al., 2013)
Clustering Clustering the dataset into different classes based on available target
vector (Huang, Zhu, et al., 2006; Zong et al., 2013)
Credit card Deciding to approve or reject credit card request based on the available
information such as credit score, income level, gender age, sex, and
many others (Tang et al., 2016)
Liver disorder Diagnosing alcohol-related liver disorder based on the reports of
various blood tests (Tang et al., 2016)
Cancer Classification of the leukaemia cancer as acute lymphoblast leukaemia
or acute myeloid leukaemia (Tang et al., 2016; Zong et al., 2013)
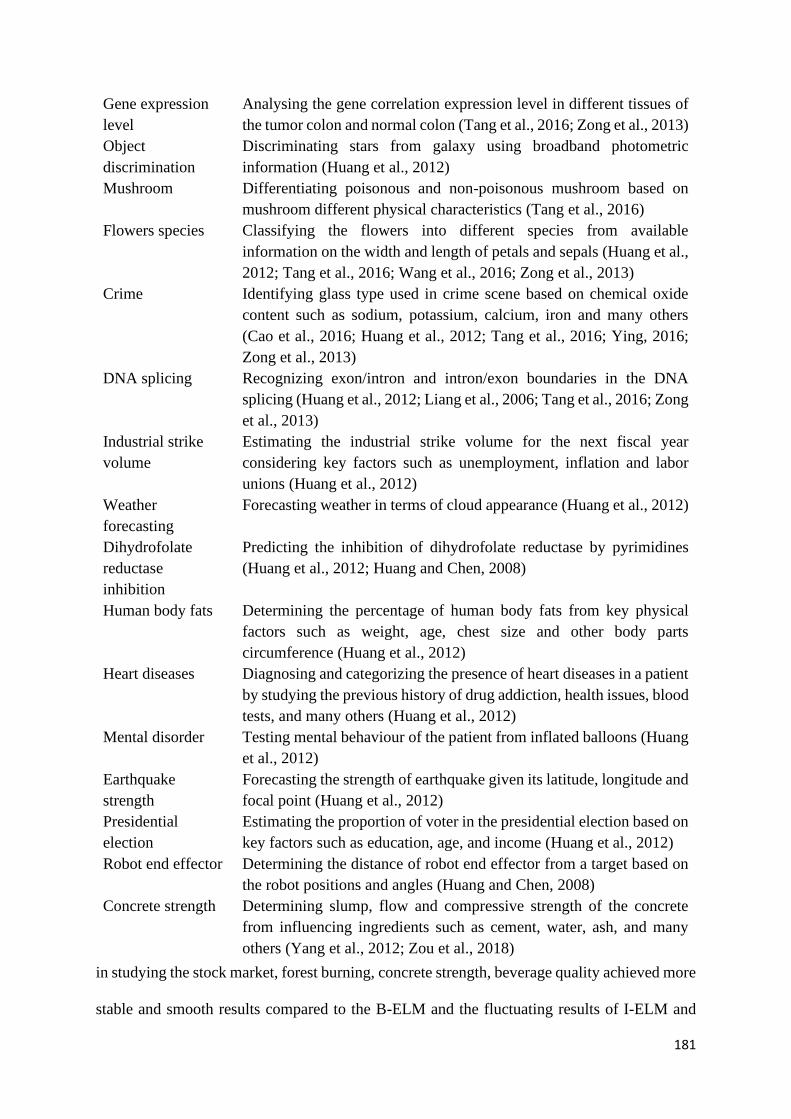
181
in studying the stock market, forest burning, concrete strength, beverage quality achieved more
stable and smooth results compared to the B-ELM and the fluctuating results of I-ELM and
Gene expression
level
Analysing the gene correlation expression level in different tissues of
the tumor colon and normal colon (Tang et al., 2016; Zong et al., 2013)
Object
discrimination
Discriminating stars from galaxy using broadband photometric
information (Huang et al., 2012)
Mushroom Differentiating poisonous and non-poisonous mushroom based on
mushroom different physical characteristics (Tang et al., 2016)
Flowers species Classifying the flowers into different species from available
information on the width and length of petals and sepals (Huang et al.,
2012; Tang et al., 2016; Wang et al., 2016; Zong et al., 2013)
Crime Identifying glass type used in crime scene based on chemical oxide
content such as sodium, potassium, calcium, iron and many others
(Cao et al., 2016; Huang et al., 2012; Tang et al., 2016; Ying, 2016;
Zong et al., 2013)
DNA splicing Recognizing exon/intron and intron/exon boundaries in the DNA
splicing (Huang et al., 2012; Liang et al., 2006; Tang et al., 2016; Zong
et al., 2013)
Industrial strike
volume
Estimating the industrial strike volume for the next fiscal year
considering key factors such as unemployment, inflation and labor
unions (Huang et al., 2012)
Weather
forecasting
Forecasting weather in terms of cloud appearance (Huang et al., 2012)
Dihydrofolate
reductase
inhibition
Predicting the inhibition of dihydrofolate reductase by pyrimidines
(Huang et al., 2012; Huang and Chen, 2008)
Human body fats Determining the percentage of human body fats from key physical
factors such as weight, age, chest size and other body parts
circumference (Huang et al., 2012)
Heart diseases Diagnosing and categorizing the presence of heart diseases in a patient
by studying the previous history of drug addiction, health issues, blood
tests, and many others (Huang et al., 2012)
Mental disorder Testing mental behaviour of the patient from inflated balloons (Huang
et al., 2012)
Earthquake
strength
Forecasting the strength of earthquake given its latitude, longitude and
focal point (Huang et al., 2012)
Presidential
election
Estimating the proportion of voter in the presidential election based on
key factors such as education, age, and income (Huang et al., 2012)
Robot end effector Determining the distance of robot end effector from a target based on
the robot positions and angles (Huang and Chen, 2008)
Concrete strength Determining slump, flow and compressive strength of the concrete
from influencing ingredients such as cement, water, ash, and many
others (Yang et al., 2012; Zou et al., 2018)
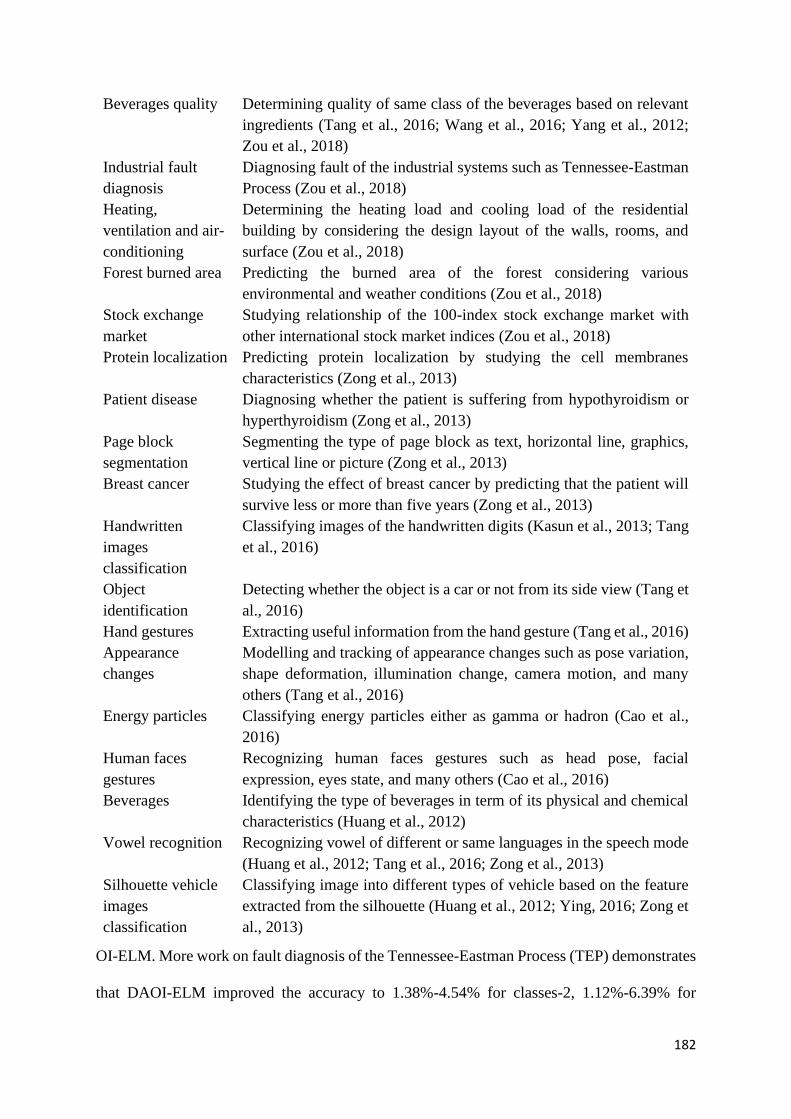
182
OI-ELM. More work on fault diagnosis of the Tennessee-Eastman Process (TEP) demonstrates
that DAOI-ELM improved the accuracy to 1.38%-4.54% for classes-2, 1.12%-6.39% for
Beverages quality Determining quality of same class of the beverages based on relevant
ingredients (Tang et al., 2016; Wang et al., 2016; Yang et al., 2012;
Zou et al., 2018)
Industrial fault
diagnosis
Diagnosing fault of the industrial systems such as Tennessee-Eastman
Process (Zou et al., 2018)
Heating,
ventilation and air-
conditioning
Determining the heating load and cooling load of the residential
building by considering the design layout of the walls, rooms, and
surface (Zou et al., 2018)
Forest burned area Predicting the burned area of the forest considering various
environmental and weather conditions (Zou et al., 2018)
Stock exchange
market
Studying relationship of the 100-index stock exchange market with
other international stock market indices (Zou et al., 2018)
Protein localization Predicting protein localization by studying the cell membranes
characteristics (Zong et al., 2013)
Patient disease Diagnosing whether the patient is suffering from hypothyroidism or
hyperthyroidism (Zong et al., 2013)
Page block
segmentation
Segmenting the type of page block as text, horizontal line, graphics,
vertical line or picture (Zong et al., 2013)
Breast cancer Studying the effect of breast cancer by predicting that the patient will
survive less or more than five years (Zong et al., 2013)
Handwritten
images
classification
Classifying images of the handwritten digits (Kasun et al., 2013; Tang
et al., 2016)
Object
identification
Detecting whether the object is a car or not from its side view (Tang et
al., 2016)
Hand gestures Extracting useful information from the hand gesture (Tang et al., 2016)
Appearance
changes
Modelling and tracking of appearance changes such as pose variation,
shape deformation, illumination change, camera motion, and many
others (Tang et al., 2016)
Energy particles Classifying energy particles either as gamma or hadron (Cao et al.,
2016)
Human faces
gestures
Recognizing human faces gestures such as head pose, facial
expression, eyes state, and many others (Cao et al., 2016)
Beverages Identifying the type of beverages in term of its physical and chemical
characteristics (Huang et al., 2012)
Vowel recognition Recognizing vowel of different or same languages in the speech mode
(Huang et al., 2012; Tang et al., 2016; Zong et al., 2013)
Silhouette vehicle
images
classification
Classifying image into different types of vehicle based on the feature
extracted from the silhouette (Huang et al., 2012; Ying, 2016; Zong et
al., 2013)
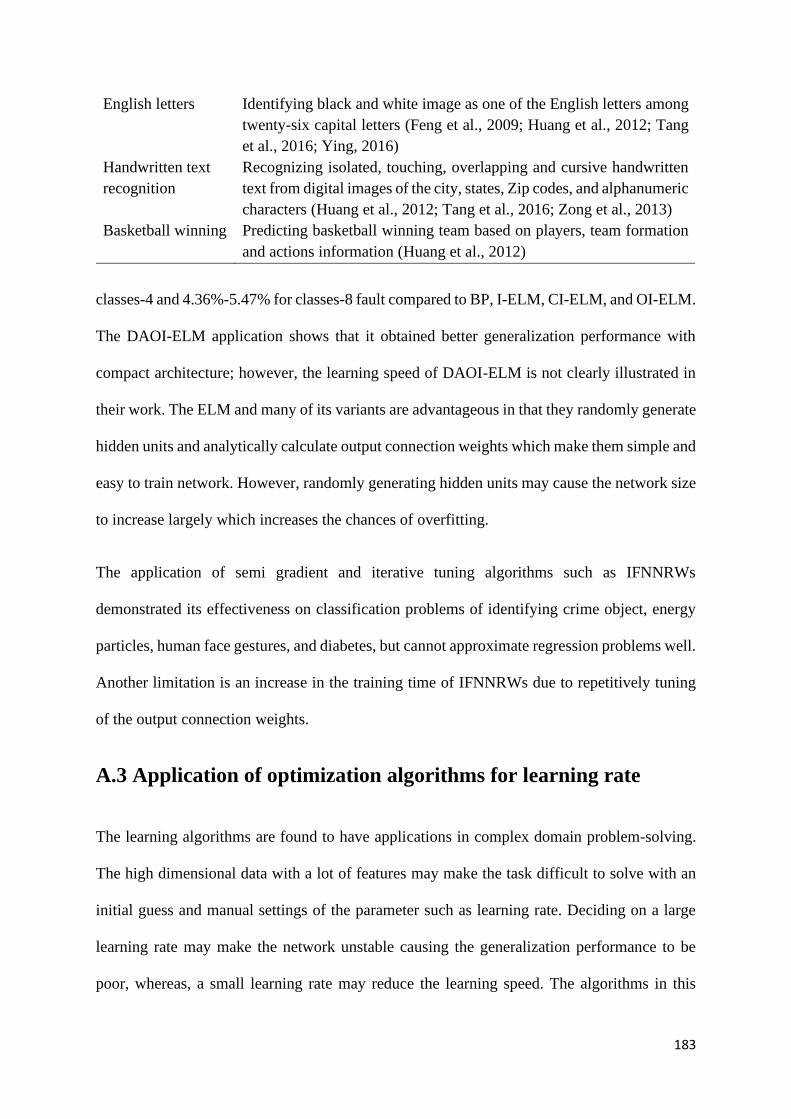
183
classes-4 and 4.36%-5.47% for classes-8 fault compared to BP, I-ELM, CI-ELM, and OI-ELM.
The DAOI-ELM application shows that it obtained better generalization performance with
compact architecture; however, the learning speed of DAOI-ELM is not clearly illustrated in
their work. The ELM and many of its variants are advantageous in that they randomly generate
hidden units and analytically calculate output connection weights which make them simple and
easy to train network. However, randomly generating hidden units may cause the network size
to increase largely which increases the chances of overfitting.
The application of semi gradient and iterative tuning algorithms such as IFNNRWs
demonstrated its effectiveness on classification problems of identifying crime object, energy
particles, human face gestures, and diabetes, but cannot approximate regression problems well.
Another limitation is an increase in the training time of IFNNRWs due to repetitively tuning
of the output connection weights.
A.3 Application of optimization algorithms for learning rate
The learning algorithms are found to have applications in complex domain problem-solving.
The high dimensional data with a lot of features may make the task difficult to solve with an
initial guess and manual settings of the parameter such as learning rate. Deciding on a large
learning rate may make the network unstable causing the generalization performance to be
poor, whereas, a small learning rate may reduce the learning speed. The algorithms in this
English letters Identifying black and white image as one of the English letters among
twenty-six capital letters (Feng et al., 2009; Huang et al., 2012; Tang
et al., 2016; Ying, 2016)
Handwritten text
recognition
Recognizing isolated, touching, overlapping and cursive handwritten
text from digital images of the city, states, Zip codes, and alphanumeric
characters (Huang et al., 2012; Tang et al., 2016; Zong et al., 2013)
Basketball winning Predicting basketball winning team based on players, team formation
and actions information (Huang et al., 2012)
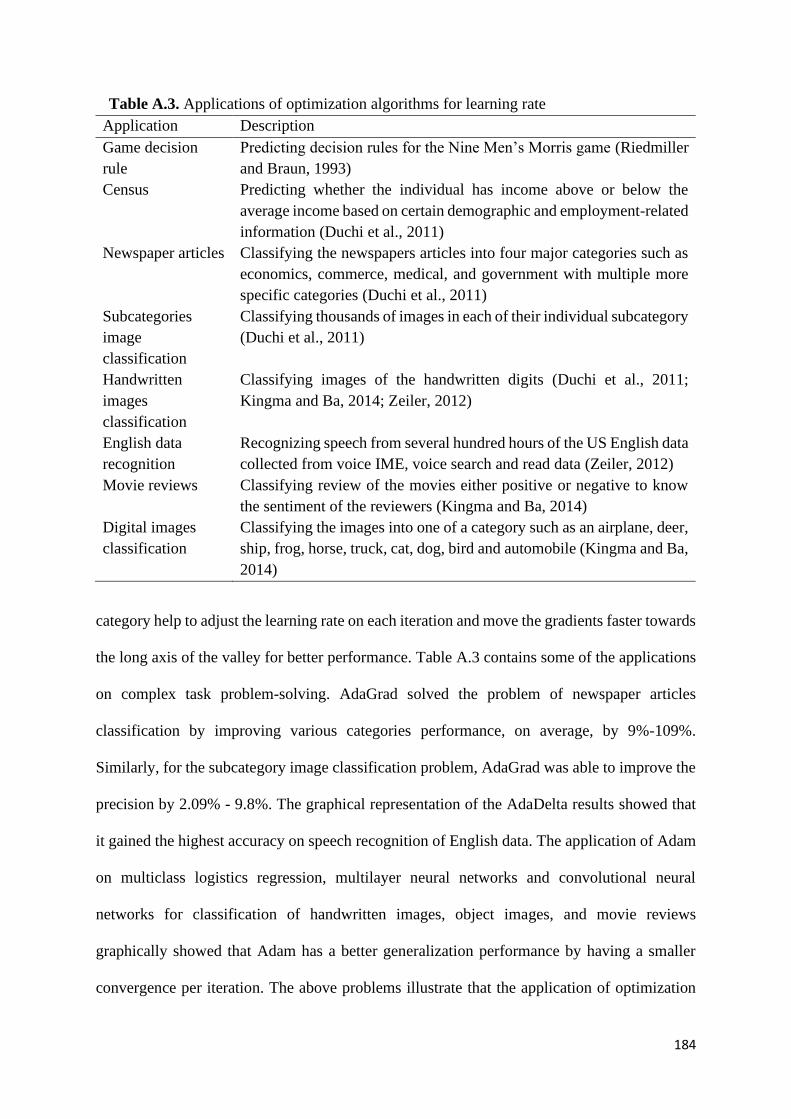
184
category help to adjust the learning rate on each iteration and move the gradients faster towards
the long axis of the valley for better performance. Table A.3 contains some of the applications
on complex task problem-solving. AdaGrad solved the problem of newspaper articles
classification by improving various categories performance, on average, by 9%-109%.
Similarly, for the subcategory image classification problem, AdaGrad was able to improve the
precision by 2.09% - 9.8%. The graphical representation of the AdaDelta results showed that
it gained the highest accuracy on speech recognition of English data. The application of Adam
on multiclass logistics regression, multilayer neural networks and convolutional neural
networks for classification of handwritten images, object images, and movie reviews
graphically showed that Adam has a better generalization performance by having a smaller
convergence per iteration. The above problems illustrate that the application of optimization
Table A.3. Applications of optimization algorithms for learning rate
Application Description
Game decision
rule
Predicting decision rules for the Nine Men’s Morris game (Riedmiller
and Braun, 1993)
Census Predicting whether the individual has income above or below the
average income based on certain demographic and employment-related
information (Duchi et al., 2011)
Newspaper articles Classifying the newspapers articles into four major categories such as
economics, commerce, medical, and government with multiple more
specific categories (Duchi et al., 2011)
Subcategories
image
classification
Classifying thousands of images in each of their individual subcategory
(Duchi et al., 2011)
Handwritten
images
classification
Classifying images of the handwritten digits (Duchi et al., 2011;
Kingma and Ba, 2014; Zeiler, 2012)
English data
recognition
Recognizing speech from several hundred hours of the US English data
collected from voice IME, voice search and read data (Zeiler, 2012)
Movie reviews Classifying review of the movies either positive or negative to know
the sentiment of the reviewers (Kingma and Ba, 2014)
Digital images
classification
Classifying the images into one of a category such as an airplane, deer,
ship, frog, horse, truck, cat, dog, bird and automobile (Kingma and Ba,
2014)
185
algorithms for the learning rate are more suitable for high dimension complex datasets to avoid
manual adjustment of the learning rate.
A.4 Applications of bias and variance minimization algorithms
The algorithms in this category improve the generalization performance of the network and
include applications that cannot be solved by a simple network, and more sophisticated
knowledge is needed to avoid overfitting in gaining better performance. The regularization,
pruning, and ensembles methods are implemented by training many networks simultaneously
to get the average best results. The limitation of this category is that it requires more learning
time compared to the standard networks for convergence. The limitation can be minimized by
adopting a hybrid approach using learning optimization algorithms and this category. Besides,
the limitation of regularization techniques such as dropout, DropConnect, and shakeout are that
they are suitable to work with fully connected neural networks.
Table A.4 shows some of the applications in areas such as classification, recognition,
segmentation, and forecasting. Shakeout work on the classification of high dimensional digital
images and complex handwritten digits images, comprising more than 50,000 images,
improved the accuracy by about 0.95%-2.85% and 1.63%-4.55% respectively for fully
connected neural networks. For classifying more than 50,000 house number images generated
from google street views, DropConnect slightly enhanced the accuracy to 0.02%-0.03%.
Similarly, DropConnect work on 3D object recognition achieved a better accuracy of 0.34%.
Shakeout and DropConnect show promising results on highly complex data, however, the
popularity and success of the dropout technique in many applications is comparatively high.
Some applications of dropout include classifying species images into their classes and
subclasses, recognizing the different dialect speech, classifying newspaper articles into
different categories, detecting human diseases by predicting alternative splicing and classifying
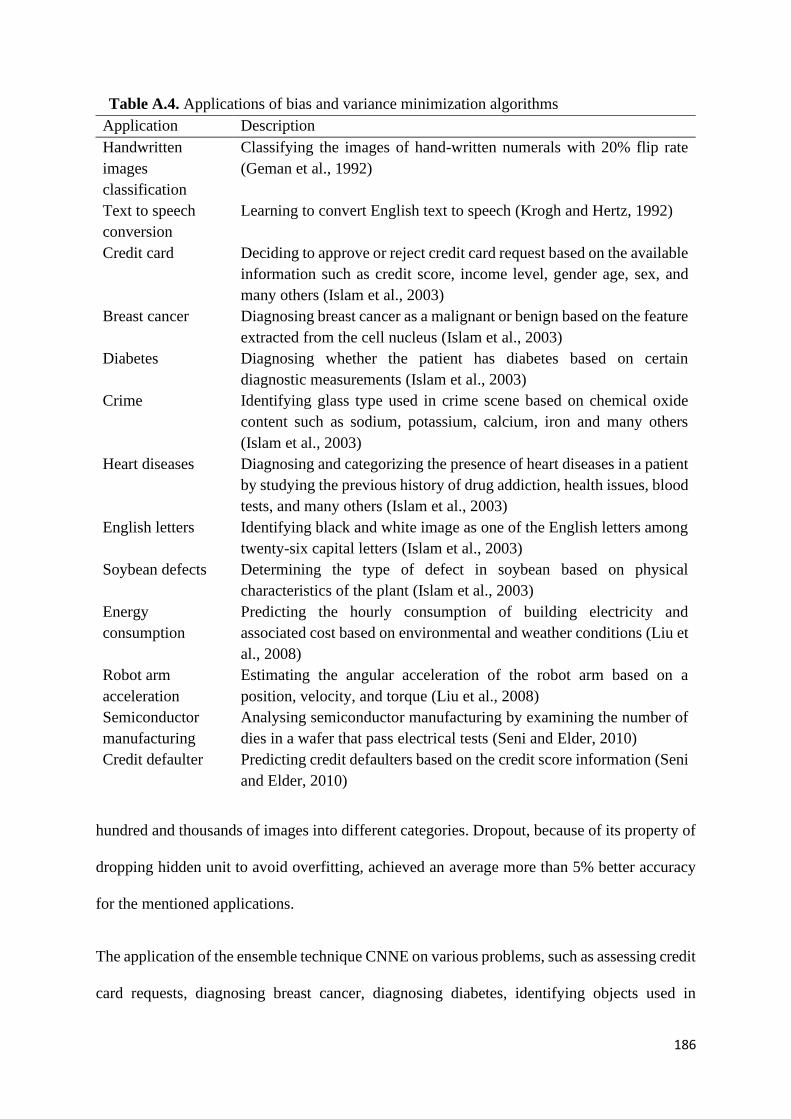
186
hundred and thousands of images into different categories. Dropout, because of its property of
dropping hidden unit to avoid overfitting, achieved an average more than 5% better accuracy
for the mentioned applications.
The application of the ensemble technique CNNE on various problems, such as assessing credit
card requests, diagnosing breast cancer, diagnosing diabetes, identifying objects used in
Table A.4. Applications of bias and variance minimization algorithms
Application Description
Handwritten
images
classification
Classifying the images of hand-written numerals with 20% flip rate
(Geman et al., 1992)
Text to speech
conversion
Learning to convert English text to speech (Krogh and Hertz, 1992)
Credit card Deciding to approve or reject credit card request based on the available
information such as credit score, income level, gender age, sex, and
many others (Islam et al., 2003)
Breast cancer Diagnosing breast cancer as a malignant or benign based on the feature
extracted from the cell nucleus (Islam et al., 2003)
Diabetes Diagnosing whether the patient has diabetes based on certain
diagnostic measurements (Islam et al., 2003)
Crime Identifying glass type used in crime scene based on chemical oxide
content such as sodium, potassium, calcium, iron and many others
(Islam et al., 2003)
Heart diseases Diagnosing and categorizing the presence of heart diseases in a patient
by studying the previous history of drug addiction, health issues, blood
tests, and many others (Islam et al., 2003)
English letters Identifying black and white image as one of the English letters among
twenty-six capital letters (Islam et al., 2003)
Soybean defects Determining the type of defect in soybean based on physical
characteristics of the plant (Islam et al., 2003)
Energy
consumption
Predicting the hourly consumption of building electricity and
associated cost based on environmental and weather conditions (Liu et
al., 2008)
Robot arm
acceleration
Estimating the angular acceleration of the robot arm based on a
position, velocity, and torque (Liu et al., 2008)
Semiconductor
manufacturing
Analysing semiconductor manufacturing by examining the number of
dies in a wafer that pass electrical tests (Seni and Elder, 2010)
Credit defaulter Predicting credit defaulters based on the credit score information (Seni
and Elder, 2010)
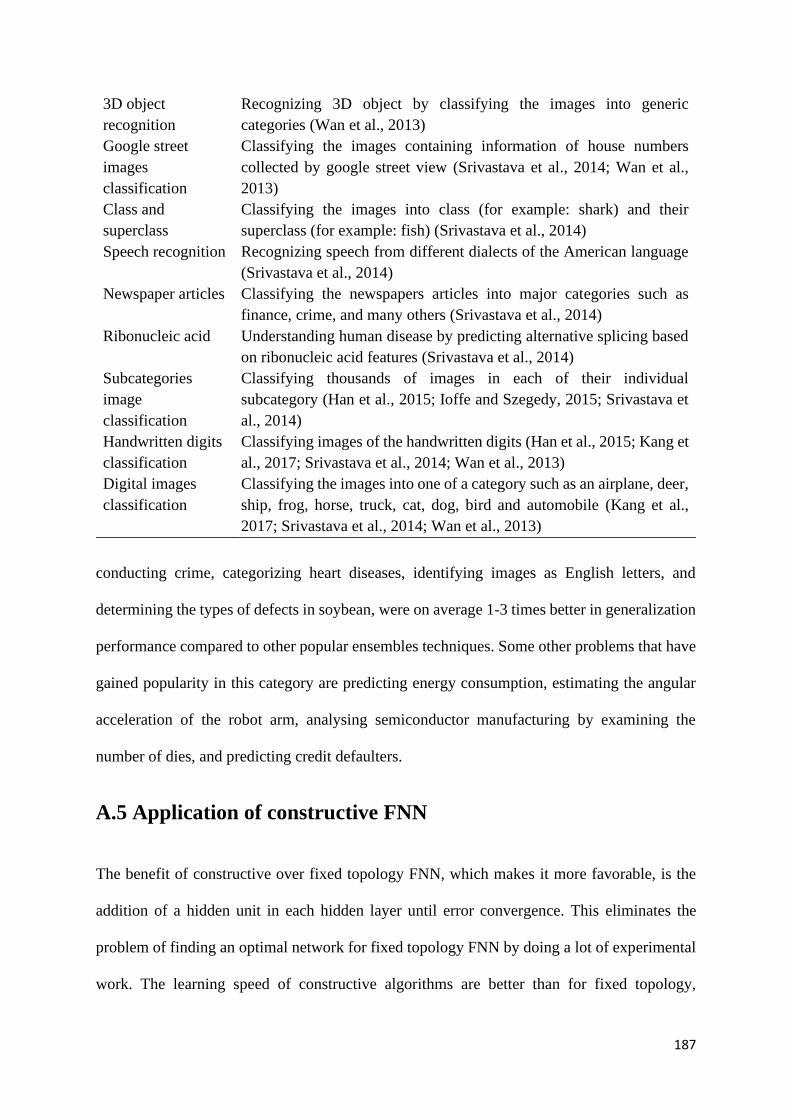
187
conducting crime, categorizing heart diseases, identifying images as English letters, and
determining the types of defects in soybean, were on average 1-3 times better in generalization
performance compared to other popular ensembles techniques. Some other problems that have
gained popularity in this category are predicting energy consumption, estimating the angular
acceleration of the robot arm, analysing semiconductor manufacturing by examining the
number of dies, and predicting credit defaulters.
A.5 Application of constructive FNN
The benefit of constructive over fixed topology FNN, which makes it more favorable, is the
addition of a hidden unit in each hidden layer until error convergence. This eliminates the
problem of finding an optimal network for fixed topology FNN by doing a lot of experimental
work. The learning speed of constructive algorithms are better than for fixed topology,
3D object
recognition
Recognizing 3D object by classifying the images into generic
categories (Wan et al., 2013)
Google street
images
classification
Classifying the images containing information of house numbers
collected by google street view (Srivastava et al., 2014; Wan et al.,
2013)
Class and
superclass
Classifying the images into class (for example: shark) and their
superclass (for example: fish) (Srivastava et al., 2014)
Speech recognition Recognizing speech from different dialects of the American language
(Srivastava et al., 2014)
Newspaper articles Classifying the newspapers articles into major categories such as
finance, crime, and many others (Srivastava et al., 2014)
Ribonucleic acid Understanding human disease by predicting alternative splicing based
on ribonucleic acid features (Srivastava et al., 2014)
Subcategories
image
classification
Classifying thousands of images in each of their individual
subcategory (Han et al., 2015; Ioffe and Szegedy, 2015; Srivastava et
al., 2014)
Handwritten digits
classification
Classifying images of the handwritten digits (Han et al., 2015; Kang et
al., 2017; Srivastava et al., 2014; Wan et al., 2013)
Digital images
classification
Classifying the images into one of a category such as an airplane, deer,
ship, frog, horse, truck, cat, dog, bird and automobile (Kang et al.,
2017; Srivastava et al., 2014; Wan et al., 2013)
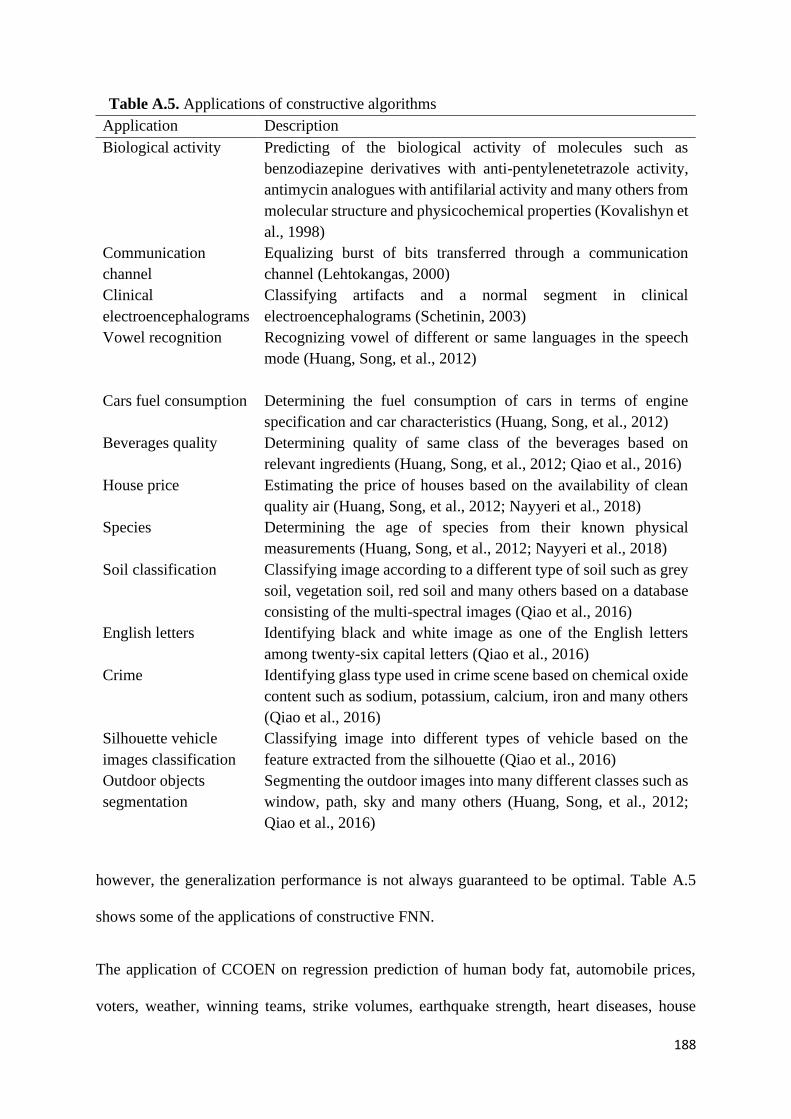
188
however, the generalization performance is not always guaranteed to be optimal. Table A.5
shows some of the applications of constructive FNN.
The application of CCOEN on regression prediction of human body fat, automobile prices,
voters, weather, winning teams, strike volumes, earthquake strength, heart diseases, house
Table A.5. Applications of constructive algorithms
Application Description
Biological activity Predicting of the biological activity of molecules such as
benzodiazepine derivatives with anti-pentylenetetrazole activity,
antimycin analogues with antifilarial activity and many others from
molecular structure and physicochemical properties (Kovalishyn et
al., 1998)
Communication
channel
Equalizing burst of bits transferred through a communication
channel (Lehtokangas, 2000)
Clinical
electroencephalograms
Classifying artifacts and a normal segment in clinical
electroencephalograms (Schetinin, 2003)
Vowel recognition Recognizing vowel of different or same languages in the speech
mode (Huang, Song, et al., 2012)
Cars fuel consumption Determining the fuel consumption of cars in terms of engine
specification and car characteristics (Huang, Song, et al., 2012)
Beverages quality Determining quality of same class of the beverages based on
relevant ingredients (Huang, Song, et al., 2012; Qiao et al., 2016)
House price Estimating the price of houses based on the availability of clean
quality air (Huang, Song, et al., 2012; Nayyeri et al., 2018)
Species Determining the age of species from their known physical
measurements (Huang, Song, et al., 2012; Nayyeri et al., 2018)
Soil classification Classifying image according to a different type of soil such as grey
soil, vegetation soil, red soil and many others based on a database
consisting of the multi-spectral images (Qiao et al., 2016)
English letters Identifying black and white image as one of the English letters
among twenty-six capital letters (Qiao et al., 2016)
Crime Identifying glass type used in crime scene based on chemical oxide
content such as sodium, potassium, calcium, iron and many others
(Qiao et al., 2016)
Silhouette vehicle
images classification
Classifying image into different types of vehicle based on the
feature extracted from the silhouette (Qiao et al., 2016)
Outdoor objects
segmentation
Segmenting the outdoor images into many different classes such as
window, path, sky and many others (Huang, Song, et al., 2012;
Qiao et al., 2016)
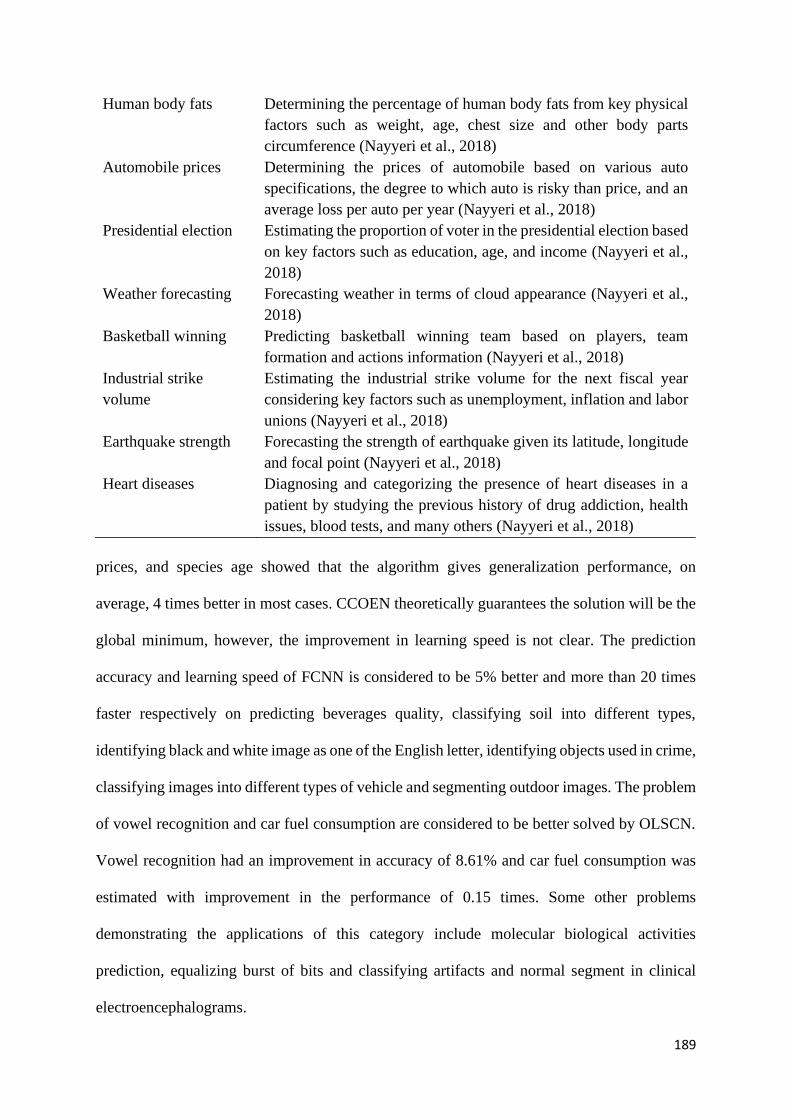
189
prices, and species age showed that the algorithm gives generalization performance, on
average, 4 times better in most cases. CCOEN theoretically guarantees the solution will be the
global minimum, however, the improvement in learning speed is not clear. The prediction
accuracy and learning speed of FCNN is considered to be 5% better and more than 20 times
faster respectively on predicting beverages quality, classifying soil into different types,
identifying black and white image as one of the English letter, identifying objects used in crime,
classifying images into different types of vehicle and segmenting outdoor images. The problem
of vowel recognition and car fuel consumption are considered to be better solved by OLSCN.
Vowel recognition had an improvement in accuracy of 8.61% and car fuel consumption was
estimated with improvement in the performance of 0.15 times. Some other problems
demonstrating the applications of this category include molecular biological activities
prediction, equalizing burst of bits and classifying artifacts and normal segment in clinical
electroencephalograms.
Human body fats Determining the percentage of human body fats from key physical
factors such as weight, age, chest size and other body parts
circumference (Nayyeri et al., 2018)
Automobile prices Determining the prices of automobile based on various auto
specifications, the degree to which auto is risky than price, and an
average loss per auto per year (Nayyeri et al., 2018)
Presidential election Estimating the proportion of voter in the presidential election based
on key factors such as education, age, and income (Nayyeri et al.,
2018)
Weather forecasting Forecasting weather in terms of cloud appearance (Nayyeri et al.,
2018)
Basketball winning Predicting basketball winning team based on players, team
formation and actions information (Nayyeri et al., 2018)
Industrial strike
volume
Estimating the industrial strike volume for the next fiscal year
considering key factors such as unemployment, inflation and labor
unions (Nayyeri et al., 2018)
Earthquake strength Forecasting the strength of earthquake given its latitude, longitude
and focal point (Nayyeri et al., 2018)
Heart diseases Diagnosing and categorizing the presence of heart diseases in a
patient by studying the previous history of drug addiction, health
issues, blood tests, and many others (Nayyeri et al., 2018)
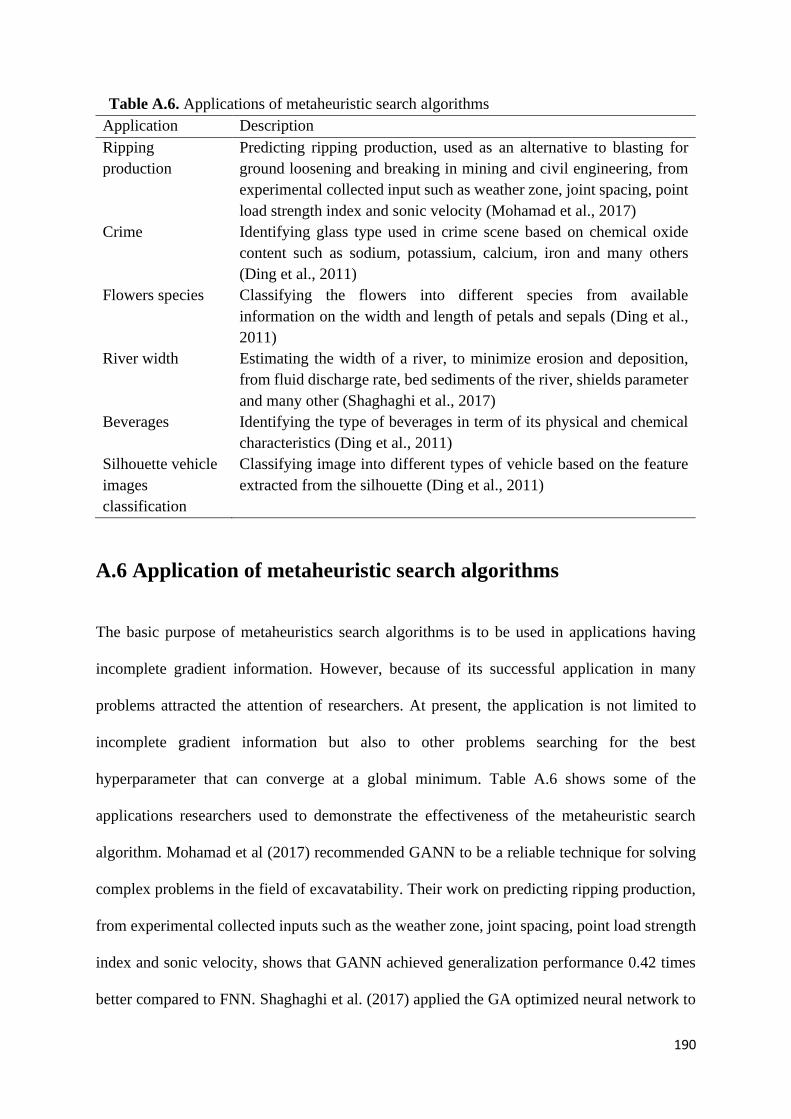
190
A.6 Application of metaheuristic search algorithms
The basic purpose of metaheuristics search algorithms is to be used in applications having
incomplete gradient information. However, because of its successful application in many
problems attracted the attention of researchers. At present, the application is not limited to
incomplete gradient information but also to other problems searching for the best
hyperparameter that can converge at a global minimum. Table A.6 shows some of the
applications researchers used to demonstrate the effectiveness of the metaheuristic search
algorithm. Mohamad et al (2017) recommended GANN to be a reliable technique for solving
complex problems in the field of excavatability. Their work on predicting ripping production,
from experimental collected inputs such as the weather zone, joint spacing, point load strength
index and sonic velocity, shows that GANN achieved generalization performance 0.42 times
better compared to FNN. Shaghaghi et al. (2017) applied the GA optimized neural network to
Table A.6. Applications of metaheuristic search algorithms
Application Description
Ripping
production
Predicting ripping production, used as an alternative to blasting for
ground loosening and breaking in mining and civil engineering, from
experimental collected input such as weather zone, joint spacing, point
load strength index and sonic velocity (Mohamad et al., 2017)
Crime Identifying glass type used in crime scene based on chemical oxide
content such as sodium, potassium, calcium, iron and many others
(Ding et al., 2011)
Flowers species Classifying the flowers into different species from available
information on the width and length of petals and sepals (Ding et al.,
2011)
River width Estimating the width of a river, to minimize erosion and deposition,
from fluid discharge rate, bed sediments of the river, shields parameter
and many other (Shaghaghi et al., 2017)
Beverages Identifying the type of beverages in term of its physical and chemical
characteristics (Ding et al., 2011)
Silhouette vehicle
images
classification
Classifying image into different types of vehicle based on the feature
extracted from the silhouette (Ding et al., 2011)

191
estimate the width of a river and found a 0.40 times better generalization performance. Besides,
it was reported that neural networks optimized by GA are more efficient than PSO. Ding et al.
(2011) worked on predicting flower species, beverages type, identifying objects used in crime
and classifying images showed that the hybrid approach of GA and BP achieved a prediction
accuracy on average 2%-3% better than GA and BP. The study further explained that the
accuracy of BP in the above problems is better than GA. Furthermore, it was concluded that
the GA needs more learning time compared to BP and this learning speed can be increased to
some extent by using the hybrid approach. The hybrid approach achieved learning speed 0.05
times better than GA but was still slower than BP.
192
References
Abdel-Hamid, O., Mohamed, A., Jiang, H., Deng, L., Penn, G. and Yu, D. (2014),
“Convolutional neural networks for speech recognition”, IEEE/ACM Transactions on
Audio, Speech, and Language Processing, Vol. 22 No. 10, pp. 1533–1545.
Abdelghany, K., Abdelghany, A. and Raina, S. (2005), “A model for the airlines’ fuel
management strategies”, Journal of Air Transport Management, Vol. 11 No. 4, pp. 199–
206.
Al_Janabi, S., Al_Shourbaji, I. and Salman, M.A. (2018), “Assessing the suitability of soft
computing approaches for forest fires prediction”, Applied Computing and Informatics,
Elsevier, Vol. 14 No. 2, pp. 214–224.
Au, K.F., Choi, T.M. and Yu, Y. (2008), “Fashion retail forecasting by evolutionary neural
networks”, International Journal of Production Economics, Elsevier, Vol. 114 No. 2, pp.
615–630.
Babaee, M., Dinh, D.T. and Rigoll, G. (2018), “A deep convolutional neural network for video
sequence background subtraction”, Pattern Recognition, Elsevier Ltd, Vol. 76, pp. 635–
649.
Bagirov, A., Taheri, S. and Asadi, S. (2019), “A difference of convex optimization algorithm
for piecewise linear regression”, Journal of Industrial & Management Optimization, Vol.
15 No. 2, pp. 909–932.
Baklacioglu, T. (2016), “Modeling the fuel flow-rate of transport aircraft during flight phases
using genetic algorithm-optimized neural networks”, Aerospace Science and Technology,
Elsevier Masson SAS, Vol. 49, pp. 52–62.
Banerjee, P., Singh, V.S., Chatttopadhyay, K., Chandra, P.C. and Singh, B. (2011), “Artificial
neural network model as a potential alternative for groundwater salinity forecasting”,
Journal of Hydrology, Elsevier, Vol. 398 No. 3–4, pp. 212–220.
Bianchini, M. and Scarselli, F. (2014), “On the complexity of neural network classifiers: A
comparison between shallow and deep architectures”, IEEE Transactions on Neural
Networks and Learning Systems, IEEE, Vol. 25 No. 8, pp. 1553–1565.
Bottani, E., Centobelli, P., Gallo, M., Kaviani, M.A., Jain, V. and Murino, T. (2019),
“Modelling wholesale distribution operations: an artificial intelligence framework”,
Industrial Management & Data Systems, Emerald Publishing Limited, Vol. 119 No. 4,
pp. 698–718.
Candanedo, L.M. and Feldheim, V. (2016), “Accurate occupancy detection of an office room
from light, temperature, humidity and CO2 measurements using statistical learning
models”, Energy and Buildings, Elsevier, Vol. 112, pp. 28–39.
193
Cao, F., Wang, D., Zhu, H. and Wang, Y. (2016), “An iterative learning algorithm for
feedforward neural networks with random weights”, Information Sciences, Elsevier Inc.,
Vol. 328, pp. 546–557.
Cao, W., Wang, X., Ming, Z. and Gao, J. (2018), “A review on neural networks with random
weights”, Neurocomputing, Elsevier, Vol. 275, pp. 278–287.
Chati, Y.S. and Balakrishnan, H. (2017), “Statistical modeling of aircraft engine fuel”, Twelfth
USA/Europe Air Traffic Management Research and Development Seminar (ATM 2017).
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K. and Yuille, A.L. (2018), “DeepLab:
Semantic image segmentation with deep convolutional nets, atrous convolution, and fully
connected CRFs”, IEEE Transactions on Pattern Analysis and Machine Intelligence,
IEEE, Vol. 40 No. 4, pp. 834–848.
Cheng, Y. (2017), “Backpropagation for fully connected cascade networks”, Neural
Processing Letters, Springer, Vol. 46 No. 1, pp. 293–311.
Choi, T.-M., Cai, Y.-J. and Shen, B. (2018), “Sustainable fashion supply chain management:
A system of systems analysis”, IEEE Transactions on Engineering Management, IEEE,
Vol. 66 No. 4, pp. 730–745.
Choi, T.M., Chiu, C.H. and Chan, H.K. (2016), “Risk management of logistics systems”,
Transportation Research Part E: Logistics and Transportation Review, Elsevier, Vol. 90,
pp. 1–6.
Choi, T.M., Wallace, S.W. and Wang, Y. (2018), “Big data analytics in operations
management”, Production and Operations Management, Wiley Online Library, Vol. 27
No. 10, pp. 1868–1883.
Chung, S.H., Ma, H.L. and Chan, H.K. (2017), “Cascading delay risk of airline workforce
deployments with crew pairing and schedule optimization”, Risk Analysis, Wiley Online
Library, Vol. 37 No. 8, pp. 1443–1458.
Chung, S.H., Tse, Y.K. and Choi, T.M. (2015), “Managing disruption risk in express logistics
via proactive planning”, Industrial Management & Data Systems, Emerald Group
Publishing Limited, Vol. 115 No. 8, pp. 1481–1509.
Collins, B.P. (1982), “Estimation of aircraft fuel consumption”, Journal of Aircraft, Vol. 19
No. 11, pp. 969–975.
Cui, Q. and Li, Y. (2017), “Airline efficiency measures under CNG2020 strategy: An
application of a Dynamic By-production model”, Transportation Research Part A: Policy
and Practice, Elsevier, Vol. 106, pp. 130–143.
Dancila, B.D., Botez, R. and Labour, D. (2013), “Fuel burn prediction algorithm for cruise,
constant speed and level flight segments”, Aeronautical Journal, Vol. 117 No. 1191, pp.
194
491–504.
Deng, C., Miao, J., Ma, Y., Wei, B. and Feng, Y. (2019), “Reliability analysis of chatter
stability for milling process system with uncertainties based on neural network and fourth
moment method”, International Journal of Production Research, Taylor & Francis, pp.
1–19.
Diao, X. and Chen, C.-H. (2018), “A sequence model for air traffic flow management rerouting
problem”, Transportation Research Part E: Logistics and Transportation Review,
Elsevier, Vol. 110, pp. 15–30.
Ding, S., Su, C. and Yu, J. (2011), “An optimizing BP neural network algorithm based on
genetic algorithm”, Artificial Intelligence Review, Vol. 36 No. 2, pp. 153–162.
Dong, C., Loy, C.C., He, K. and Tang, X. (2016), “Image super-resolution Using deep
convolutional networks”, IEEE Transactions on Pattern Analysis and Machine
Intelligence, Vol. 38 No. 2, pp. 295–307.
Dua, D. and Taniskidou, E.K. (2017), “UCI Machine Learning Repository”, available at:
http://archive.ics.uci.edu/ml (accessed 28 March 2018).
Duchi, J., Hazan, E. and Singer, Y. (2011), “Adaptive subgradient methods for online learning
and stochastic optimization”, Journal of Machine Learning Research, Vol. 12, pp. 2121–
2159.
Ebadzadeh, M.M. and Salimi-Badr, A. (2018), “IC-FNN: A novel fuzzy neural network with
interpretable, intuitive, and correlated-contours fuzzy rules for function approximation”,
IEEE Transactions on Fuzzy Systems, IEEE, Vol. 26 No. 3, pp. 1288–1302.
Eberhart, R. and Kennedy, J. (1995), “A new optimizer using particle swarm theory”,
Proceedings of the Sixth International Symposium on Micro Machine and Human Science
MHS’95., pp. 39–43.
Edwards, H.A., Dixon-Hardy, D. and Wadud, Z. (2016), “Aircraft cost index and the future of
carbon emissions from air travel”, Applied Energy, Elsevier, Vol. 164, pp. 553–562.
Fahlman, S.E. (1988), An Empirical Study of Learning Speed in Back-Propagation Networks,
School of Computer Science, Carnegie Mellon University, Pittsburgh PA 15213.
Fahlman, S.E. and Lebiere, C. (1990), “The cascade-correlation learning architecture”, in
Lippmann, R.P., Moody, J.E. and Touretzky, D.S. (Eds.), Advances in Neural Information
Processing Systems, Morgan Kaufmann, Denver, pp. 524–532.
Farlow, S.J. (1981), “The GMDH algorithm of Ivakhnenko”, The American Statistician, Vol.
35 No. 4, pp. 210–215.
Feng, G., Huang, G.-B., Lin, Q. and Gay, R.K.L. (2009), “Error minimized extreme learning
195
machine with growth of hidden nodes and incremental learning”, IEEE Trans. Neural
Networks, Vol. 20 No. 8, pp. 1352–1357.
Ferrari, S. and Stengel, R.F. (2005), “Smooth function approximation using neural networks”,
IEEE Transactions on Neural Networks, Vol. 16 No. 1, pp. 24–38.
Fierimonte, R., Barbato, M., Rosato, A. and Panella, M. (2016), “Distributed learning of
random weights fuzzy neural networks”, International Conference on Fuzzy Systems,
IEEE, pp. 2287–2294.
Geman, S., Doursat, R. and Bienenstock, E. (1992), “Neural networks and the bias/variance
dilemma”, Neural Computation, Vol. 4 No. 1, pp. 1–58.
Goldberger, A.S. (1964), “Classical linear regression”, Econometric Theory, New York: John
Wiley & Sons., pp. 156–212.
Gori, M. and Tesi, A. (1992), “On the problem of local minima in backpropagation”, IEEE
Transactions on Pattern Analysis & Machine Intelligence, IEEE, Vol. 14 No. 1, pp. 76–
86.
Guo, X., Grushka-Cockayne, Y. and De Reyck, B. (2018), “Forecasting airport transfer
passenger flow using real-time data and machine learning”, SSRN Electronic Journal,
available at:https://doi.org/10.2139/ssrn.3245609.
Hagan, M.T. and Menhaj, M.B. (1994), “Training feedforward networks with the Marquardt
algorithm”, IEEE Transactions on Neural Networks, Vol. 5 No. 6, pp. 989–993.
Han, F., Zhao, M.-R., Zhang, J.-M. and Ling, Q.-H. (2017), “An improved incremental
constructive single-hidden-layer feedforward networks for extreme learning machine
based on particle swarm optimization”, Neurocomputing, Elsevier, Vol. 228, pp. 133–142.
Han, S., Pool, J., Tran, J. and Dally, W.J. (2015), “Learning both weights and connections for
efficient neural networks”, in Cortes, C., Lawrence, N.D., Lee, D.D., Sugiyama, M. and
Garnett, R. (Eds.), Advances in Neural Information Processing Systems, MIT press,
Montreal, pp. 1135–1143.
Hansen, L.K. and Salamon, P. (1990), “Neural network ensembles”, IEEE Transactions on
Pattern Analysis and Machine Intelligence, Vol. 12 No. 10, pp. 993–1001.
Hayashi, Y., Hsieh, M.-H. and Setiono, R. (2010), “Understanding consumer heterogeneity: A
business intelligence application of neural networks”, Knowledge-Based Systems,
Elsevier, Vol. 23 No. 8, pp. 856–863.
Hecht-Nielsen, R. (1989), “Theory of the backpropagation neural network”, International Joint
Conference on Neural Networks, Vol. 1, IEEE, Washington DC, pp. 593–605 vol.1.
Hinton, G.E., Srivastava, N. and Swersky, K. (2012), “Lecture 6a- overview of mini-batch
196
gradient descent”, COURSERA: Neural Networks for Machine Learning, available at:
http://www.cs.toronto.edu/~tijmen/csc321/slides/lecture_slides_lec6.pdf (accessed 19
July 2018).
Hornik, K., Stinchcombe, M. and White, H. (1989), “Multilayer feedforward networks are
universal approximators”, Neural Networks, Vol. 2 No. 5, pp. 359–366.
Huang, C., Xu, Y. and Johnson, M.E. (2017), “Statistical modeling of the fuel flow rate of GA
piston engine aircraft using flight operational data”, Transportation Research Part D:
Transport and Environment, Elsevier, Vol. 53, pp. 50–62.
Huang, G.-B. and Chen, L. (2007), “Convex incremental extreme learning machine”,
Neurocomputing, Elsevier, Vol. 70 No. 16–18, pp. 3056–3062.
Huang, G.-B. and Chen, L. (2008), “Enhanced random search based incremental extreme
learning machine”, Neurocomputing, Vol. 71 No. 16–18, pp. 3460–3468.
Huang, G.-B., Chen, L. and Siew, C.K. (2006), “Universal approximation using incremental
constructive feedforward networks with random hidden nodes”, IEEE Transactions on
Neural Networks, Vol. 17 No. 4, pp. 879–892.
Huang, G.-B., Zhou, H., Ding, X. and Zhang, R. (2012), “Extreme learning machine for
regression and multiclass classification”, IEEE Transactions on Systems, Man, and
Cybernetics. Part B, Cybernetics, Vol. 42 No. 2, pp. 513–29.
Huang, G.-B., Zhu, Q.-Y. and Siew, C.-K. (2006), “Extreme learning machine: theory and
applications”, Neurocomputing, Vol. 70 No. 1–3, pp. 489–501.
Huang, G., Huang, G.-B., Song, S. and You, K. (2015), “Trends in extreme learning machines:
A review”, Neural Networks, Elsevier, Vol. 61, pp. 32–48.
Huang, G., Song, S. and Wu, C. (2012), “Orthogonal least squares algorithm for training
cascade neural networks”, IEEE Transactions on Circuits and Systems I: Regular Papers,
Vol. 59 No. 11, pp. 2629–2637.
Hunter, D., Yu, H., Pukish III, M.S., Kolbusz, J. and Wilamowski, B.M. (2012), “Selection of
proper neural network sizes and architectures—A comparative study”, IEEE Transactions
on Industrial Informatics, Vol. 8 No. 2, pp. 228–240.
Hwang, J.-N., You, S.-S., Lay, S.-R. and Jou, I.-C. (1996), “The cascade-correlation learning:
A projection pursuit learning perspective”, IEEE Transactions on Neural Networks, Vol.
7 No. 2, pp. 278–289.
IATA. (2018), “Fact Sheet Climate Change & CORSIA”, Online, available at:
https://www.iata.org/pressroom/facts_figures/fact_sheets/Documents/fact-sheet-climate-
change.pdf (accessed 7 May 2018).
197
IATA. (2019), “Industry facts and statistics”, Online, available at:
https://www.iata.org/pressroom/facts_figures/fact_sheets/Pages/index.aspx (accessed 5
August 2019).
Ijjina, E.P. and Chalavadi, K.M. (2016), “Human action recognition using genetic algorithms
and convolutional neural networks”, Pattern Recognition, Elsevier, Vol. 59, pp. 199–212.
Ioffe, S. and Szegedy, C. (2015), “Batch Normalization: Accelerating deep network training
by reducing internal covariate shift”, available at:https://doi.org/10.1007/s13398-014-
0173-7.2.
Irrgang, M.E., Kaul, C.E., Hall, A.E., Klerk, A.D., Elham and Boozarjomehri. (2015), “Aircraft
fuel optimization analytics”.
Islam, M., Yao, X. and Murase, K. (2003), “A constructive algorithm for training cooperative
neural network ensembles”, IEEE Transactions on Neural Networks, Vol. 14 No. 4, pp.
820–834.
Jensen, L., Hansman, R.J., Venuti, J.C. and Reynolds, T. (2013), “Commercial airline speed
optimization strategies for reduced cruise fuel consumption”, 2013 Aviation Technology,
Integration, and Operations Conference, pp. 1026–1038.
Jolliffe, I.T. (2002), Principal Component Analysis, edited by 2, Springer-Verlag, New York.
Kang, G., Li, J. and Tao, D. (2017), “Shakeout: A new approach to regularized deep neural
network training”, IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol.
40 No. 5, pp. 1245–1258.
Kapanova, K.G., Dimov, I. and Sellier, J.M. (2018), “A genetic approach to automatic neural
network architecture optimization”, Neural Computing and Applications, Springer, Vol.
29 No. 5, pp. 1481–1492.
Karlik, B. and Olgac, V. (2011), “Performance analysis of various activation functions in
generalized MLP architectures of neural networks”, International Journal of Artificial
Intelligence And Expert Systems (IJAE), Vol. 1 No. 4, pp. 111–122.
Karnin, E.D. (1990), “A simple procedure for pruning back-propagation trained neural
networks”, IEEE Transactions on Neural Networks, Vol. 1 No. 2, pp. 239–242.
Kastrati, Z., Imran, A.S. and Yayilgan, S.Y. (2019), “The impact of deep learning on document
classification using semantically rich representations”, Information Processing &
Management, Elsevier, Vol. 56 No. 5, pp. 1618–1632.
Kasun, L.L.C., Zhou, H., Huang, G. and Vong, C. (2013), “Representational learning with
extreme learning machine for big data”, IEEE Intelligent System, Vol. 28 No. 6, pp. 31–
34.
198
Khanmohammadi, S., Tutun, S. and Kucuk, Y. (2016), “A new multilevel input layer artificial
neural network for predicting flight delays at JFK airport”, Procedia Computer Science,
Elsevier, Vol. 95, pp. 237–244.
Kim, Y.-S., Rim, H.-C. and Lee, D.-G. (2019), “Business environmental analysis for textual
data using data mining and sentence-level classification”, Industrial Management & Data
Systems, Emerald Publishing Limited, Vol. 119 No. 1, pp. 69–88.
Kingma, D.P. and Ba, J. (2014), “Adam: A Method for Stochastic Optimization”, pp. 1–15.
Kovalishyn, V. V, Tetko, I. V, Luik, A.I., Kholodovych, V. V, Villa, A.E.P. and Livingstone,
D.J. (1998), “Neural network studies. 3. variable selection in the cascade-correlation
learning architecture”, Journal of Chemical Information and Computer Sciences, Vol. 38
No. 4, pp. 651–659.
Krogh, A. and Hertz, J.A. (1992), “A simple weight decay can improve generalization”, in
Hanson, S.J., Cowan, J.D. and Giles, C.L. (Eds.), Advances in Neural Information
Processing Systems, Morgan Kaufmann, Denver, pp. 950–957.
Krogh, A. and Vedelsby, J. (1995), “Neural Network Ensembles, Cross Validation, and Active
Learning”, in Touretzky, D.S., Mozer, M. and Hasselmo, M.E. (Eds.), Advances in Neural
Information Processing Systems, MIT press, Denver, pp. 231–238.
Kumar, A., Rao, V.R. and Soni, H. (1995), “An empirical comparison of neural network and
logistic regression models”, Marketing Letters, Vol. 6 No. 4, pp. 251–263.
Kummong, R. and Supratid, S. (2016), “Thailand tourism forecasting based on a hybrid of
discrete wavelet decomposition and NARX neural network”, Industrial Management and
Data Systems, Vol. 116 No. 6, pp. 1242–1258.
Kuo, Y.-H. and Kusiak, A. (2019), “From data to big data in production research: the past and
future trends”, International Journal of Production Research, Taylor & Francis, Vol. 57
No. 15–16, pp. 4828–4853.
Kwok, T.-Y. and Yeung, D.-Y. (1997), “Constructive algorithms for structure learning in
feedforward neural networks for regression problems”, IEEE Transactions on Neural
Networks, Vol. 8 No. 3, pp. 630–645.
Lam, H.Y., Ho, G.T.S., Wu, C.-H. and Choy, K.L. (2014), “Customer relationship mining
system for effective strategies formulation”, Industrial Management & Data Systems,
Emerald Group Publishing Limited, Vol. 114 No. 5, pp. 711–733.
Lang, K.J. (1989), “Learning to tell two spirals apart”, Proceedings of the 1988 Connectionist
Models Summer School, Morgan Kaufmann, pp. 52–59.
LeCun, Y., Bengio, Y. and Hinton, G. (2015), “Deep learning”, Nature, Nature Publishing
Group, Vol. 521 No. 7553, pp. 436–444.
199
Lehtokangas, M. (2000), “Modified cascade-correlation learning for classification”, IEEE
Transactions on Neural Networks, Vol. 11 No. 3, pp. 795–798.
Lewis, A.S. and Overton, M.L. (2013), “Nonsmooth optimization via quasi-Newton methods”,
Mathematical Programming, Vol. 141 No. 1–2, pp. 135–163.
Li, M., Ch’ng, E., Chong, A.Y.L. and See, S. (2018), “Multi-class Twitter sentiment
classification with emojis”, Industrial Management & Data Systems, Emerald Publishing
Limited, Vol. 118 No. 9, pp. 1804–1820.
Liang, H. and Dai, G. (1998), “Improvement of cascade correlation learning”, Information
Sciences, Vol. 112 No. 1–4, pp. 1–6.
Liang, N.-Y., Huang, G.-B., Saratchandran, P. and Sundararajan, N. (2006), “A fast and
accurate online sequential learning algorithm for feedforward networks”, IEEE
Transactions on Neural Networks, Vol. 17 No. 6, pp. 1411–1423.
Liew, S.S., Khalil-Hani, M. and Bakhteri, R. (2016), “An optimized second order stochastic
learning algorithm for neural network training”, Neurocomputing, Elsevier, Vol. 186, pp.
74–89.
Lin, Z. and Vlachos, I. (2018), “An advanced analytical framework for improving customer
satisfaction: A case of air passengers”, Transportation Research Part E: Logistics and
Transportation Review, Elsevier, Vol. 114, pp. 185–195.
Ling, Y., Zhou, Y. and Luo, Q. (2017), “Lévy flight trajectory-based whale optimization
algorithm for global optimization.”, IEEE Access, Vol. 5 No. 99, pp. 6168–6186.
Liu, Y., Starzyk, J.A. and Zhu, Z. (2008), “Optimized approximation algorithm in neural
networks without overfitting”, IEEE Transactions on Neural Networks, Vol. 19 No. 6, pp.
983–995.
Lu, X., Ming, L., Liu, W. and Li, H.-X. (2018), “Probabilistic regularized extreme learning
machine for robust modeling of noise data”, IEEE Transactions on Cybernetics, IEEE,
Vol. 48 No. 8, pp. 2368–2377.
Lucas, J.M. and Saccucci, M.S. (1990), “Exponentially weighted moving average control
schemes: Properties and enhancements”, Technometrics, IEEE, Vol. 32 No. 1, pp. 1–12.
Merkert, R. and Swidan, H. (2019), “Flying with(out) a safety net: Financial hedging in the
airline industry”, Transportation Research Part E: Logistics and Transportation Review,
Elsevier, Vol. 127, pp. 206–219.
Mirjalili, S. and Lewis, A. (2016), “The whale optimization algorithm”, Advances in
Engineering Software, Elsevier Ltd, Vol. 95, pp. 51–67.
Mitchell, M. (1998), “Genetic Algorithms: An Overview”, in Watson, T., Robbins, C., Belew,
200
R.K., Wilson, S.W., Holland, J.H., Waltz, D.L. and Koza, J.R. (Eds.), An Introduction to
Genetic Algorithms, MIT press, London, England, pp. 1–15.
Mohamad, E.T., Faradonbeh, R.S., Armaghani, D.J., Monjezi, M. and Majid, M.Z.A. (2017),
“An optimized ANN model based on genetic algorithm for predicting ripping production”,
Neural Computing and Applications, Springer, Vol. 28 No. 1, pp. 393–406.
Mohamed Shakeel, P., Tobely, T.E. El, Al-Feel, H., Manogaran, G. and Baskar, S. (2019),
“Neural network based brain tumor detection using wireless infrared imaging sensor”,
IEEE Access, IEEE, Vol. 7, pp. 5577–5588.
Mori, J., Kajikawa, Y., Kashima, H. and Sakata, I. (2012), “Machine learning approach for
finding business partners and building reciprocal relationships”, Expert Systems with
Applications, Elsevier, Vol. 39 No. 12, pp. 10402–10407.
Nasir, M., South-Winter, C., Ragothaman, S. and Dag, A. (2019), “A comparative data analytic
approach to construct a risk trade-off for cardiac patients’ re-admissions”, Industrial
Management & Data Systems, Emerald Publishing Limited, Vol. 119 No. 1, pp. 189–209.
Nayyeri, M., Yazdi, H.S., Maskooki, A. and Rouhani, M. (2018), “Universal approximation by
using the correntropy objective function”, IEEE Transactions on Neural Networks and
Learning Systems, IEEE, Vol. 29 No. 9, pp. 4515–4521.
Nguyen, D. and Widrow, B. (1990), “Improving the learning speed of 2-layer neural networks
by choosing initial values of the adaptive weights”, International Joint Conference on
Neural Networks, Vol. 3, IEEE, San Diego CA, pp. 21–26.
Nuic, A. (2014), User Manual for the Base of Aircraft Data (BADA) Revision 3.12, European
Organisation for the Safety of Air Navigation, available at:
https://www.eurocontrol.int/sites/default/files/field_tabs/content/documents/sesar/user-
manual-bada-3-12.pdf.
Pagoni, I. and Psaraki-Kalouptsidi, V. (2017), “Calculation of aircraft fuel consumption and
CO2 emissions based on path profile estimation by clustering and registration”,
Transportation Research Part D: Transport and Environment, Elsevier, Vol. 54, pp. 172–
190.
Qian, N. (1999), “On the momentum term in gradient descent learning algorithms”, Neural
Networks, Vol. 12 No. 1, pp. 145–151.
Qiao, J., Li, F., Han, H. and Li, W. (2016), “Constructive algorithm for fully connected cascade
feedforward neural networks”, Neurocomputing, Elsevier, Vol. 182, pp. 154–164.
Reed, R. (1993), “Pruning algorithms-a survey”, IEEE Transactions on Neural Networks, Vol.
4 No. 5, pp. 740–747.
Riedmiller, M. and Braun, H. (1993), “A direct adaptive method for faster backpropagation
201
learning: the RPROP algorithm”, IEEE International Conference on Neural Networks,
Vol. 1993, IEEE, pp. 586–591.
Ruiz-Aguilar, J.J., Turias, I.J. and Jiménez-Come, M.J. (2014), “Hybrid approaches based on
SARIMA and artificial neural networks for inspection time series forecasting”,
Transportation Research Part E: Logistics and Transportation Review, Elsevier, Vol. 67,
pp. 1–13.
Rumelhart, D.E., Hinton, G.E. and Williams, R.J. (1986), “Learning representations by back-
propagating errors”, Nature, Vol. 323 No. 6088, pp. 533–536.
Ryerson, M.S., Hansen, M. and Bonn, J. (2011), “Fuel consumption and operational
performance”, 9th USA/Europe Air Traffic Management Research and Development
Seminar, pp. 1–10.
Schetinin, V. (2003), “A learning algorithm for evolving cascade neural networks”, Neural
Processing Letters, Springer, Vol. 17 No. 1, pp. 21–31.
Schilling, G.D. (1997), Modeling Aircraft Fuel Consumption with a Neural Network, Doctoral
Dissertation, Virginia Tech.
Seni, G. and Elder, J. (2010), “Model complexity, model selection and regularization”, in
Grossman, R. (Ed.), Ensemble Methods in Data Mining: Improving Accuracy Through
Combining Predictions, Morgan & Claypool Publishers, Chicago, pp. 21–40.
Senzig, D.A., Fleming, G.G. and Iovinelli, R.J. (2009), “Modeling of terminal-area airplane
fuel consumption”, Journal of Aircraft, Vol. 46 No. 4, pp. 1089–1093.
Setiono, R. and Hui, L.C.K. (1995), “Use of a quasi-Newton method in a feedforward neural
network construction algorithm”, IEEE Transactions on Neural Networks, Vol. 6 No. 1,
pp. 273–277.
Seufert, J.H., Arjomandi, A. and Dakpo, K.H. (2017), “Evaluating airline operational
performance: A Luenberger-Hicks-Moorsteen productivity indicator”, Transportation
Research Part E: Logistics and Transportation Review, Elsevier, Vol. 104, pp. 52–68.
Shaghaghi, S., Bonakdari, H., Gholami, A., Ebtehaj, I. and Zeinolabedini, M. (2017),
“Comparative analysis of GMDH neural network based on genetic algorithm and particle
swarm optimization in stable channel design”, Applied Mathematics and Computation,
Elsevier, Vol. 313, pp. 271–286.
Shanno, D.F. (1970), “Conditioning of quasi-Newton methods for function minimization”,
Mathematics of Computation, Vol. 24 No. 111, pp. 647–647.
Shen, B. and Chan, H.-L. (2017), “Forecast information sharing for managing supply chains in
the big data era: Recent development and future research”, Asia-Pacific Journal of
Operational Research, World Scientific, Vol. 34 No. 01, pp. 1740001-1-1740001–26.
202
Shen, B., Choi, T.-M. and Chan, H.-L. (2019), “Selling green first or not? A Bayesian analysis
with service levels and environmental impact considerations in the Big Data Era”,
Technological Forecasting and Social Change, Elsevier, Vol. 144, pp. 412–420.
Shen, B., Choi, T.-M. and Minner, S. (2019), “A review on supply chain contracting with
information considerations: information updating and information asymmetry”,
International Journal of Production Research, Taylor & Francis, Vol. 57 No. 15–16, pp.
4898–4936.
Sheng, D., Li, Z.-C. and Fu, X. (2019), “Modeling the effects of airline slot hoarding behavior
under the grandfather rights with use-it-or-lose-it rule”, Transportation Research Part E:
Logistics and Transportation Review, Elsevier, Vol. 122, pp. 48–61.
Shi, Y. and Eberhart, R. (1998), “A modified particle swarm optimizer”, 1998 IEEE
International Conference on Evolutionary Computation Proceedings. IEEE World
Congress on Computational Intelligence (Cat. No.98TH8360), IEEE, pp. 69–73.
Sibdari, S., Mohammadian, I. and Pyke, D.F. (2018), “On the impact of jet fuel cost on airlines’
capacity choice: Evidence from the U.S. domestic markets”, Transportation Research
Part E: Logistics and Transportation Review, Elsevier, Vol. 111, pp. 1–17.
Singh, V. and Sharma, S.K. (2015), “Fuel consumption optimization in air transport: a review,
classification, critique, simple meta-analysis, and future research implications”, European
Transport Research Review, Springer, Vol. 7 No. 2, p. 12.
Specht, D.F. (1990), “Probabilistic neural networks”, Neural Networks, Vol. 3 No. 1, pp. 109–
118.
Specht, D.F. (1991), “A general regression neural network”, IEEE Transactions on Neural
Networks, Vol. 2 No. 6, pp. 568–576.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I. and Salakhutdinov, R. (2014),
“Dropout: A simple way to prevent neural networks from overfitting”, Journal of Machine
Learning Research, Vol. 15 No. 1, pp. 1929–1958.
Taherkhani, A., Belatreche, A., Li, Y. and Maguire, L.P. (2018), “A supervised learning
algorithm for learning precise timing of multiple spikes in multilayer spiking neural
networks”, IEEE Transactions on Neural Networks and Learning Systems, IEEE, Vol. 29
No. 11, pp. 5394–5407.
Tang, J., Deng, C. and Huang, G.-B. (2016), “Extreme learning machine for multilayer
perceptron”, IEEE Transactions on Neural Networks and Learning Systems, Vol. 27 No.
4, pp. 809–821.
Teo, A.-C., Tan, G.W.-H., Ooi, K.-B., Hew, T.-S. and Yew, K.-T. (2015), “The effects of
convenience and speed in m-payment”, Industrial Management & Data Systems, Vol. 115
203
No. 2, pp. 311–331.
Tkáč, M. and Verner, R. (2016), “Artificial neural networks in business: Two decades of
research”, Applied Soft Computing, Vol. 38, pp. 788–804.
Trani, A., Wing-Ho, F., Schilling, G., Baik, H. and Seshadri, A. (2004), “A neural network
model to estimate aircraft fuel consumption”, AIAA 4th Aviation Technology, Integration
and Operations (ATIO) Forum, American Institute of Aeronautics and Astronautics,
Reston, Virigina, p. 6401.
Trani, A.A. and Wing-Ho, F. (1997), Enhancements to SIMMOD : A Neural Network Post-
Processor to Estimate Aircraft Fuel Consumption Phase I Final Report.
Tu, J. V. (1996), “Advantages and disadvantages of using artificial neural networks versus
logistic regression for predicting medical outcomes”, Journal of Clinical Epidemiology,
Vol. 49 No. 11, pp. 1225–1231.
Turgut, E.T., Cavcar, M., Usanmaz, O., Canarslanlar, A.O., Dogeroglu, T., Armutlu, K. and
Yay, O.D. (2014), “Fuel flow analysis for the cruise phase of commercial aircraft on
domestic routes”, Aerospace Science and Technology, Vol. 37, pp. 1–9.
Turgut, E.T. and Rosen, M.A. (2012), “Relationship between fuel consumption and altitude for
commercial aircraft during descent: Preliminary assessment with a genetic algorithm”,
Aerospace Science and Technology, Vol. 17 No. 1, pp. 65–73.
Verma, L.K., Kishore, N. and Jharia, D.C. (2017), “Predicting dangerous seismic events in
active coal mines through data mining”, International Journal of Applied Engineering
Research, Vol. 12 No. 5, pp. 567–571.
Wan, L., Zeiler, M., Zhang, S., LeCun, Y. and Fergus, R. (2013), “Regularization of neural
networks using dropconnect”, International Conference on Machine Learning, pp. 109–
111.
Wang, G.-G., Lu, M., Dong, Y.-Q. and Zhao, X.-J. (2016), “Self-adaptive extreme learning
machine”, Neural Computing and Applications, Springer, Vol. 27 No. 2, pp. 291–303.
Wang, J., Wu, X. and Zhang, C. (2005), “Support vector machines based on K-means
clustering for real-time business intelligence systems”, International Journal of Business
Intelligence and Data Mining, Citeseer, Vol. 1 No. 1, pp. 54–64.
Wang, L., Yang, Y., Min, R. and Chakradhar, S. (2017), “Accelerating deep neural network
training with inconsistent stochastic gradient descent”, Neural Networks, Elsevier, Vol.
93, pp. 219–229.
Widrow, B., Greenblatt, A., Kim, Y. and Park, D. (2013), “The No-Prop algorithm: A new
learning algorithm for multilayer neural networks”, Neural Networks, Elsevier Ltd, Vol.
37, pp. 182–188.
204
Wilamowski, B.M., Cotton, N.J., Kaynak, O. and Dundar, G. (2008), “Computing gradient
vector and Jacobian matrix in arbitrarily connected neural networks”, IEEE Transactions
on Industrial Electronics, Vol. 55 No. 10, pp. 3784–3790.
Wilamowski, B.M. and Yu, H. (2010), “Neural network learning without backpropagation”,
IEEE Transactions on Neural Networks, Vol. 21 No. 11, pp. 1793–1803.
Wilson, D.R. and Martinez, T.R. (2003), “The general inefficiency of batch training for
gradient descent learning”, Neural Networks, Elsevier, Vol. 16 No. 10, pp. 1429–1451.
Wong, T.C., Haddoud, M.Y., Kwok, Y.K. and He, H. (2018), “Examining the key determinants
towards online pro-brand and anti-brand community citizenship behaviours: a two-stage
approach”, Industrial Management & Data Systems, Emerald Publishing Limited, Vol.
118 No. 4, pp. 850–872.
Yang, Y., Wang, Y. and Yuan, X. (2012), “Bidirectional extreme learning machine for
regression problem and its learning effectiveness”, IEEE Transactions on Neural
Networks and Learning Systems, IEEE, Vol. 23 No. 9, pp. 1498–1505.
Yanto, J. and Liem, R.P. (2018), “Aircraft fuel burn performance study: A data-enhanced
modeling approach”, Transportation Research Part D: Transport and Environment,
Elsevier, Vol. 65, pp. 574–595.
Yeung, D.S., Ng, W.W.Y., Wang, D., Tsang, E.C.C. and Wang, X.-Z. (2007), “Localized
Generalization Error Model and Its Application to Architecture Selection for Radial Basis
Function Neural Network”, IEEE Transactions on Neural Networks, IEEE, Vol. 18 No.
5, pp. 1294–1305.
Yin, X. and Liu, X. (2018), “Multi-task convolutional neural network for pose-invariant face
recognition”, IEEE Transactions on Image Processing, Vol. 27 No. 2, pp. 964–975.
Ying, L. (2016), “Orthogonal incremental extreme learning machine for regression and
multiclass classification”, Neural Computing and Applications, Springer, Vol. 27 No. 1,
pp. 111–120.
Ypma, T.J. (1995), “Historical development of the Newton–Raphson method”, SIAM Review,
Society for Industrial and Applied Mathematics, Vol. 37 No. 4, pp. 531–551.
Zaghloul, W., Lee, S.M. and Trimi, S. (2009), “Text classification: neural networks vs support
vector machines”, Industrial Management & Data Systems, Vol. 109 No. 5, pp. 708–717.
Zeiler, M.D. (2012), “ADADELTA: An adaptive learning rate method”, available
at:https://doi.org/http://doi.acm.org.ezproxy.lib.ucf.edu/10.1145/1830483.1830503.
Zhang, G.P. (2000), “Neural networks for classification: a survey”, IEEE Transactions on
Systems, Man, and Cybernetics, Part C (Applications and Reviews), IEEE, Vol. 30 No. 4,
pp. 451–462.
205
Zhang, J.R., Zhang, J., Lok, T.M. and Lyu, M.R. (2007), “A hybrid particle swarm
optimization-back-propagation algorithm for feedforward neural network training”,
Applied Mathematics and Computation, Vol. 185 No. 2, pp. 1026–1037.
Zong, W., Huang, G.-B. and Chen, Y. (2013), “Weighted extreme learning machine for
imbalance learning”, Neurocomputing, Elsevier, Vol. 101, pp. 229–242.
Zou, W., Xia, Y. and Li, H. (2018), “Fault diagnosis of Tennessee-Eastman process using
orthogonal incremental extreme learning machine based on driving amount”, IEEE
Transactions on Cybernetics, IEEE, Vol. 48 No. 12, pp. 3403–3410.