03-cap03-03-ret grupo fase
TRANSCRIPT
3.4. Retardo de grupo y retardo de fase 21
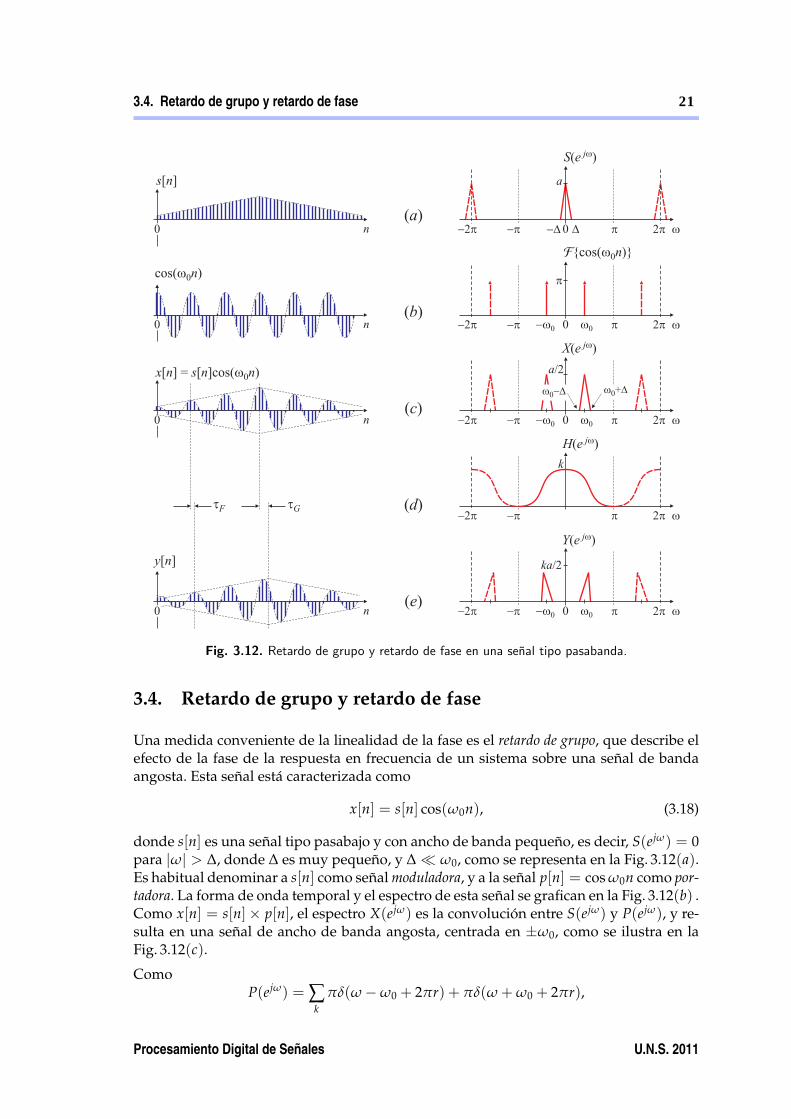
Fig. 3.12. Retardo de grupo y retardo de fase en una señal tipo pasabanda.
3.4. Retardo de grupo y retardo de fase
Una medida conveniente de la linealidad de la fase es el retardo de grupo, que describe elefecto de la fase de la respuesta en frecuencia de un sistema sobre una señal de bandaangosta. Esta señal está caracterizada como
x[n] = s[n] cos(ω0n), (3.18)
donde s[n] es una señal tipo pasabajo y con ancho de banda pequeño, es decir, S(ejω) = 0para |ω| > ∆, donde ∆ es muy pequeño, y ∆� ω0, como se representa en la Fig. 3.12(a).Es habitual denominar a s[n] como señal moduladora, y a la señal p[n] = cos ω0n como por-tadora. La forma de onda temporal y el espectro de esta señal se grafican en la Fig. 3.12(b) .Como x[n] = s[n]× p[n], el espectro X(ejω) es la convolución entre S(ejω) y P(ejω), y re-sulta en una señal de ancho de banda angosta, centrada en ±ω0, como se ilustra en laFig. 3.12(c).
ComoP(ejω) = ∑
kπδ(ω−ω0 + 2πr) + πδ(ω+ω0 + 2πr),
Procesamiento Digital de Señales U.N.S. 2011

22 3. Señales y sistemas discretos
la transformada de Fourier de la sucesión discreta (3.18) es
X(ejω) =1
2π
∫ π
−πS(ejθ)P(ej(ω−θ)) dθ
=1
2π
∫ π
−πS(ejθ)[πδ(ω− θ −ω0) + πδ(ω− θ +ω0)] dθ
= 12 S(ej(ω−ω0)) + 1
2 S(ej(ω+ω0))
Si esta señal excita un filtro discreto con respuesta en frecuencia H(ejω), representada enla Fig. 3.12(d), la transformada de Fourier de la salida y[n] del sistema es
Y(ejω) = H(ejω)X(ejω)
= 12 H(ejω)S(ej(ω−ω0+2πk)) + 1
2 H(ejω)S(ej(ω+ω0+2πk)) (3.19)
como se muestra en la Fig. 3.12(d) . La salida y[n] del filtro está dada por
y[n] =1
2π
∫ π
−πY(ejω)ejωndω =
12π
∫ π
−πH(ejω)X(ejω)ejωndω.
Como el intervalo de integración es (−π, π], de las infinitas réplicas presentes en (3.19)sólo deben considerarse las correspondientes a k = 0. Además, ya que la señal x[n] es debanda angosta, su espectro X(ejω) es nulo en todo el intervalo (−π, π] con excepción delas bandas [−ω0−∆,−ω0+∆] y [ω0−∆, ω0+∆], [Fig. 3.12(c)] de manera que
y[n]=1
2π
∫ ω0+∆
ω0−∆
12 H(ejω)S(ej(ω−ω0))ejωndω+
12π
∫ −ω0+∆
−ω0−∆
12 H(ejω)S(ej(ω+ω0))ejωndω. (3.20)
Para calcular de manera explícita la salida se deben analizar cada una de las dos integra-les de (3.20). Si se definen
y1[n] =1
2π
∫ ω0+∆
ω0−∆
12
H(ejω)S(ej(ω−ω0))ejωndω,
y2[n] =1
2π
∫ −ω0+∆
−ω0−∆
12
H(ejω)S(ej(ω+ω0))ejωndω,
es evidente que y[n] = y1[n] + y2[n]. Por lo tanto, basta analizar en detalle la primeraintegral, ya que la segunda se puede derivar de manera similar. En primer lugar, convieneintroducir un cambio de variables ω = σ+ω0, de modo que dω = dσ, y entonces
y1[n] =1
2π
∫ ∆
−∆
12
H(ej(ω0+σ))S(ejσ)ejω0nejσndσ. (3.21)
Como ∆ � ω0, H(ej(ω0+σ)) =∣∣H(ejω0+σ)
∣∣ ej arg[H(ej(ω0+σ))] se puede aproximar utilizandoseries de Taylor como∣∣∣H(ejω0+σ)
∣∣∣ ≈ ∣∣∣H(ejω0)∣∣∣+ ∂
∂ω{∣∣∣H(ejω)
∣∣∣}∣∣∣∣ω=ω0
σ, (3.22)
arg[H(ej(ω0+σ))] ≈ arg[H(ejω0)] +∂
∂ω{arg[H(ejω)]}
∣∣∣∣ω=ω0
σ, (3.23)
Procesamiento Digital de Señales U.N.S. 2011
3.4. Retardo de grupo y retardo de fase 23
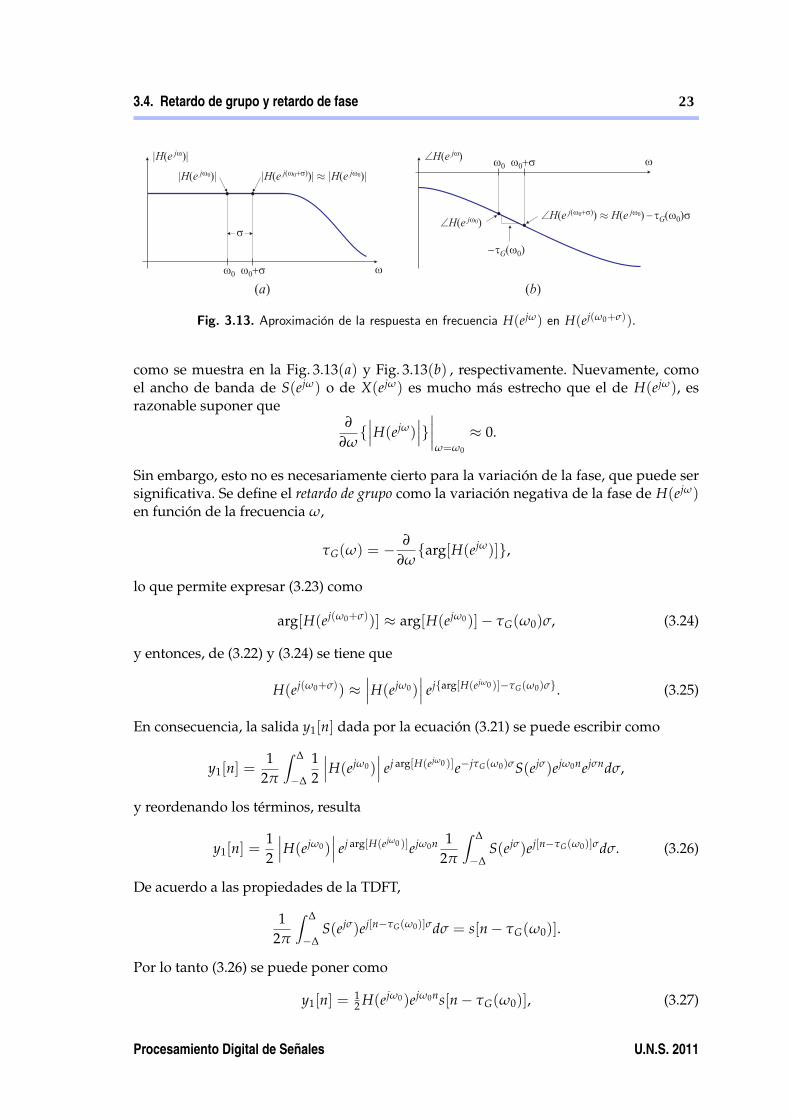
Fig. 3.13. Aproximación de la respuesta en frecuencia H(ejω) en H(ej(ω0+σ)).
como se muestra en la Fig. 3.13(a) y Fig. 3.13(b) , respectivamente. Nuevamente, comoel ancho de banda de S(ejω) o de X(ejω) es mucho más estrecho que el de H(ejω), esrazonable suponer que
∂
∂ω{∣∣∣H(ejω)
∣∣∣}∣∣∣∣ω=ω0
≈ 0.
Sin embargo, esto no es necesariamente cierto para la variación de la fase, que puede sersignificativa. Se define el retardo de grupo como la variación negativa de la fase de H(ejω)en función de la frecuencia ω,
τG(ω) = −∂
∂ω{arg[H(ejω)]},
lo que permite expresar (3.23) como
arg[H(ej(ω0+σ))] ≈ arg[H(ejω0)]− τG(ω0)σ, (3.24)
y entonces, de (3.22) y (3.24) se tiene que
H(ej(ω0+σ)) ≈∣∣∣H(ejω0)
∣∣∣ ej{arg[H(ejω0 )]−τG(ω0)σ}. (3.25)
En consecuencia, la salida y1[n] dada por la ecuación (3.21) se puede escribir como
y1[n] =1
2π
∫ ∆
−∆
12
∣∣∣H(ejω0)∣∣∣ ej arg[H(ejω0 )]e−jτG(ω0)σS(ejσ)ejω0nejσndσ,
y reordenando los términos, resulta
y1[n] =12
∣∣∣H(ejω0)∣∣∣ ej arg[H(ejω0 )]ejω0n 1
2π
∫ ∆
−∆S(ejσ)ej[n−τG(ω0)]σdσ. (3.26)
De acuerdo a las propiedades de la TDFT,
12π
∫ ∆
−∆S(ejσ)ej[n−τG(ω0)]σdσ = s[n− τG(ω0)].
Por lo tanto (3.26) se puede poner como
y1[n] = 12 H(ejω0)ejω0ns[n− τG(ω0)], (3.27)
Procesamiento Digital de Señales U.N.S. 2011

24 3. Señales y sistemas discretos
y de manera análoga, suponiendo que la respuesta impulsiva h[n] de H(ejω) es real,
y2[n] = 12 H∗(ejω0)e−jω0ns[n− τG(ω0)], (3.28)
Finalmente, de (3.27) y (3.28) resulta
y[n] =∣∣∣H(ejω0)
∣∣∣ s[n− τG(ω0)] cos{ω0n+ arg[H(ejω0)]}
=∣∣∣H(ejω0)
∣∣∣ s[n− τG(ω0)] cos{[ω0 − τF(ω0)]n},
donde τF(ω) = − arg[H(ejω)]/ω es el retardo de fase del sistema H(ejω).
En síntesis, definiendo el
retardo de grupo como τG(ω) = −∂
∂ω{arg[H(ejω)]},
retardo de fase como τF(ω) = −1ω
arg[H(ejω)],
la salida del sistema con respuesta en frecuencia H(ejω) ante una excitación de bandaangosta x[n] = s[n] cos(ω0n), donde s[n] es una señal tipo pasabajo, con S(ejω) = 0 para|ω| > ∆, y ∆� ω0 es
y[n] =∣∣∣H(ejω0)
∣∣∣ s[n− τG(ω0)] cos{[ω0 − τF(ω0)]n}.
Esta ecuación muestra que para una señal x[n] de banda angosta, la fase de H(ejω) aplicaun retardo τG (retardo de grupo) a la envolvente s[n] de la señal x[n], y un retardo de τF(retardo de fase) a la portadora cos(ω0n).
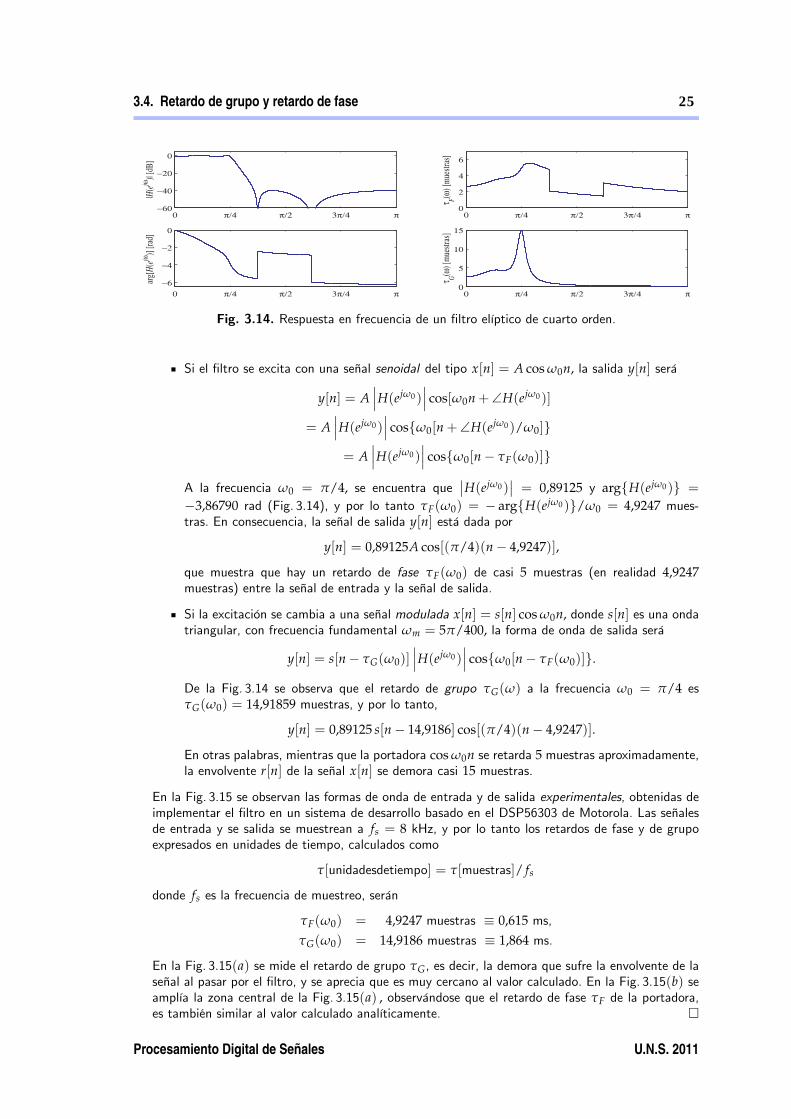
EJEMPLO 3.8. Determinación experimental del retardo de grupoEn la Fig. 3.14 se muestra la respuesta en frecuencia de un filtro elíptico de cuarto orden confrecuencia de corte ωc = π/4, con ondulación de 1 dB en la banda de paso, y 40 dB en la bandade rechazo. El filtro se implementa como una cascada de dos secciones de segundo orden
H(ejω) =b1,0 + b1,1e−jω + b1,2e−j2ω
a1,0 + a1,1e−jω + a1,2e−j2ω× b2,0 + b2,1e−jω + b2,2e−j2ω
a2,0 + a2,1e−jω + a2,2e−j2ω,
dondeSección bi ai
1 b1,0 = +0,02636248173504 a1,0 = +1,00000000000000b1,1 = +0,01905630958554 a1,1 = −1,37540781597787b1,2 = +0,02636248173504 a1,2 = +0,55745202060406
2 b2,0 = +1,00000000000000 a2,0 = +1,00000000000000b2,1 = −0,76923432315460 a2,1 = −1,31689024623849b2,2 = +1,00000000000000 a2,2 = +0,86140502929003
A continuación se estudia la respuesta del sistema ante dos excitaciones distintas.
Procesamiento Digital de Señales U.N.S. 2011
3.4. Retardo de grupo y retardo de fase 25
Fig. 3.14. Respuesta en frecuencia de un filtro elíptico de cuarto orden.
Si el filtro se excita con una señal senoidal del tipo x[n] = A cos ω0n, la salida y[n] será
y[n] = A∣∣∣H(ejω0)
∣∣∣ cos[ω0n+∠H(ejω0)]
= A∣∣∣H(ejω0)
∣∣∣ cos{ω0[n+∠H(ejω0)/ω0]}
= A∣∣∣H(ejω0)
∣∣∣ cos{ω0[n− τF(ω0)]}
A la frecuencia ω0 = π/4, se encuentra que∣∣H(ejω0)
∣∣ = 0,89125 y arg{H(ejω0)} =−3,86790 rad (Fig. 3.14), y por lo tanto τF(ω0) = − arg{H(ejω0)}/ω0 = 4,9247 mues-tras. En consecuencia, la señal de salida y[n] está dada por
y[n] = 0,89125A cos[(π/4)(n− 4,9247)],
que muestra que hay un retardo de fase τF(ω0) de casi 5 muestras (en realidad 4,9247muestras) entre la señal de entrada y la señal de salida.
Si la excitación se cambia a una señal modulada x[n] = s[n] cos ω0n, donde s[n] es una ondatriangular, con frecuencia fundamental ωm = 5π/400, la forma de onda de salida será
y[n] = s[n− τG(ω0)]∣∣∣H(ejω0)
∣∣∣ cos{ω0[n− τF(ω0)]}.
De la Fig. 3.14 se observa que el retardo de grupo τG(ω) a la frecuencia ω0 = π/4 esτG(ω0) = 14,91859 muestras, y por lo tanto,
y[n] = 0,89125 s[n− 14,9186] cos[(π/4)(n− 4,9247)].
En otras palabras, mientras que la portadora cos ω0n se retarda 5 muestras aproximadamente,la envolvente r[n] de la señal x[n] se demora casi 15 muestras.
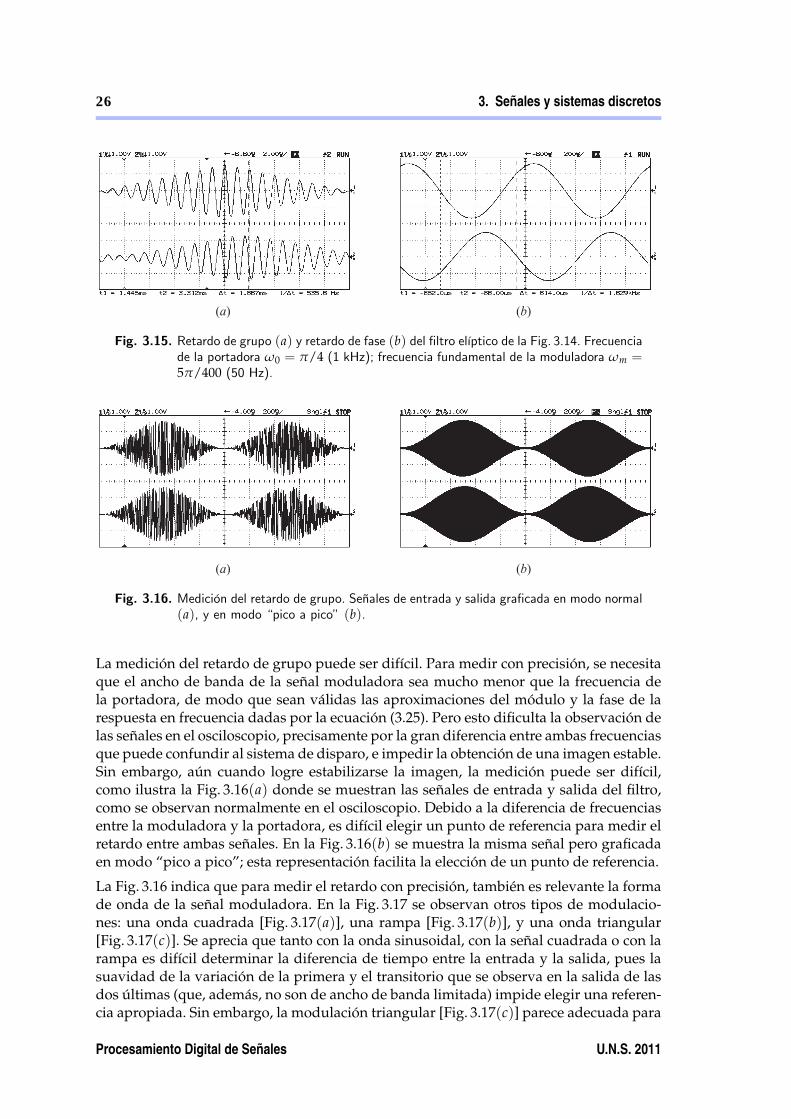
En la Fig. 3.15 se observan las formas de onda de entrada y de salida experimentales, obtenidas deimplementar el filtro en un sistema de desarrollo basado en el DSP56303 de Motorola. Las señalesde entrada y se salida se muestrean a fs = 8 kHz, y por lo tanto los retardos de fase y de grupoexpresados en unidades de tiempo, calculados como
τ[unidadesdetiempo] = τ[muestras]/ fs
donde fs es la frecuencia de muestreo, serán
τF(ω0) = 4,9247 muestras ≡ 0,615 ms,τG(ω0) = 14,9186 muestras ≡ 1,864 ms.
En la Fig. 3.15(a) se mide el retardo de grupo τG, es decir, la demora que sufre la envolvente de laseñal al pasar por el filtro, y se aprecia que es muy cercano al valor calculado. En la Fig. 3.15(b) seamplía la zona central de la Fig. 3.15(a) , observándose que el retardo de fase τF de la portadora,es también similar al valor calculado analíticamente. �
Procesamiento Digital de Señales U.N.S. 2011
26 3. Señales y sistemas discretos
Fig. 3.15. Retardo de grupo (a) y retardo de fase (b) del filtro elíptico de la Fig. 3.14. Frecuenciade la portadora ω0 = π/4 (1 kHz); frecuencia fundamental de la moduladora ωm =5π/400 (50 Hz).
Fig. 3.16. Medición del retardo de grupo. Señales de entrada y salida graficada en modo normal(a), y en modo “pico a pico” (b).
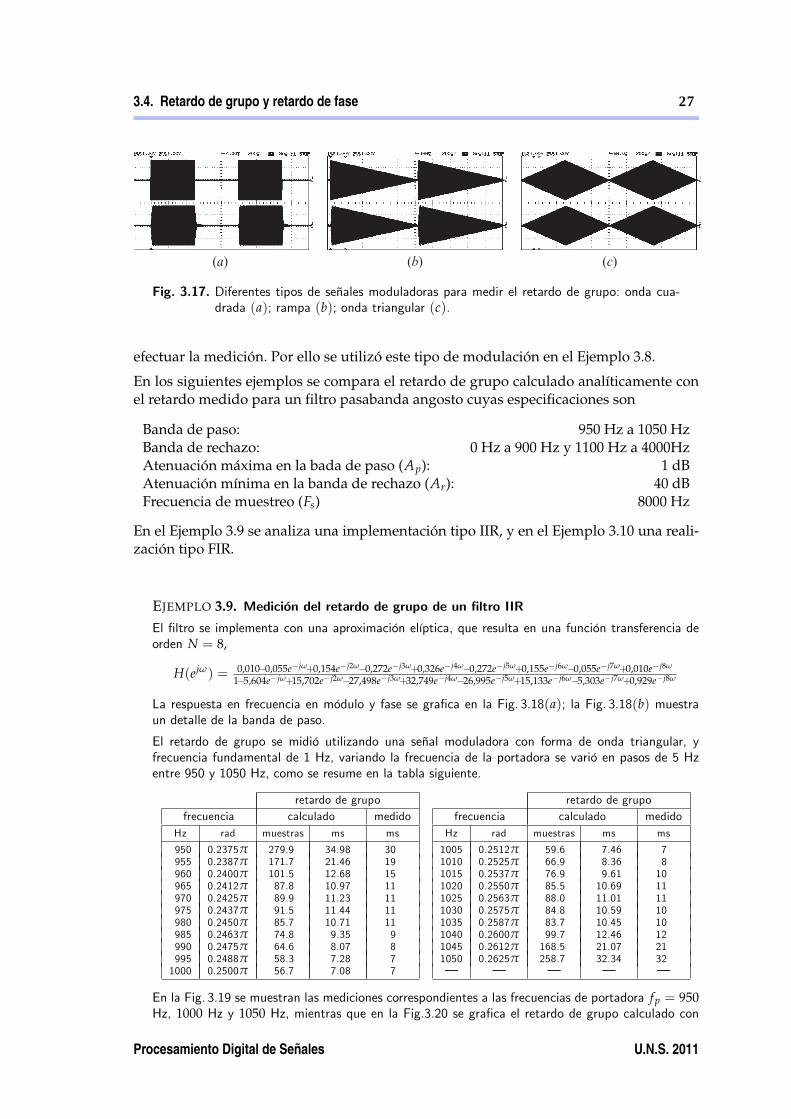
La medición del retardo de grupo puede ser difícil. Para medir con precisión, se necesitaque el ancho de banda de la señal moduladora sea mucho menor que la frecuencia dela portadora, de modo que sean válidas las aproximaciones del módulo y la fase de larespuesta en frecuencia dadas por la ecuación (3.25). Pero esto dificulta la observación delas señales en el osciloscopio, precisamente por la gran diferencia entre ambas frecuenciasque puede confundir al sistema de disparo, e impedir la obtención de una imagen estable.Sin embargo, aún cuando logre estabilizarse la imagen, la medición puede ser difícil,como ilustra la Fig. 3.16(a) donde se muestran las señales de entrada y salida del filtro,como se observan normalmente en el osciloscopio. Debido a la diferencia de frecuenciasentre la moduladora y la portadora, es difícil elegir un punto de referencia para medir elretardo entre ambas señales. En la Fig. 3.16(b) se muestra la misma señal pero graficadaen modo “pico a pico”; esta representación facilita la elección de un punto de referencia.
La Fig. 3.16 indica que para medir el retardo con precisión, también es relevante la formade onda de la señal moduladora. En la Fig. 3.17 se observan otros tipos de modulacio-nes: una onda cuadrada [Fig. 3.17(a)], una rampa [Fig. 3.17(b)], y una onda triangular[Fig. 3.17(c)]. Se aprecia que tanto con la onda sinusoidal, con la señal cuadrada o con larampa es difícil determinar la diferencia de tiempo entre la entrada y la salida, pues lasuavidad de la variación de la primera y el transitorio que se observa en la salida de lasdos últimas (que, además, no son de ancho de banda limitada) impide elegir una referen-cia apropiada. Sin embargo, la modulación triangular [Fig. 3.17(c)] parece adecuada para
Procesamiento Digital de Señales U.N.S. 2011
3.4. Retardo de grupo y retardo de fase 27
Fig. 3.17. Diferentes tipos de señales moduladoras para medir el retardo de grupo: onda cua-drada (a); rampa (b); onda triangular (c).
efectuar la medición. Por ello se utilizó este tipo de modulación en el Ejemplo 3.8.
En los siguientes ejemplos se compara el retardo de grupo calculado analíticamente conel retardo medido para un filtro pasabanda angosto cuyas especificaciones son
Banda de paso: 950 Hz a 1050 HzBanda de rechazo: 0 Hz a 900 Hz y 1100 Hz a 4000HzAtenuación máxima en la bada de paso (Ap): 1 dBAtenuación mínima en la banda de rechazo (Ar): 40 dBFrecuencia de muestreo (Fs) 8000 Hz
En el Ejemplo 3.9 se analiza una implementación tipo IIR, y en el Ejemplo 3.10 una reali-zación tipo FIR.
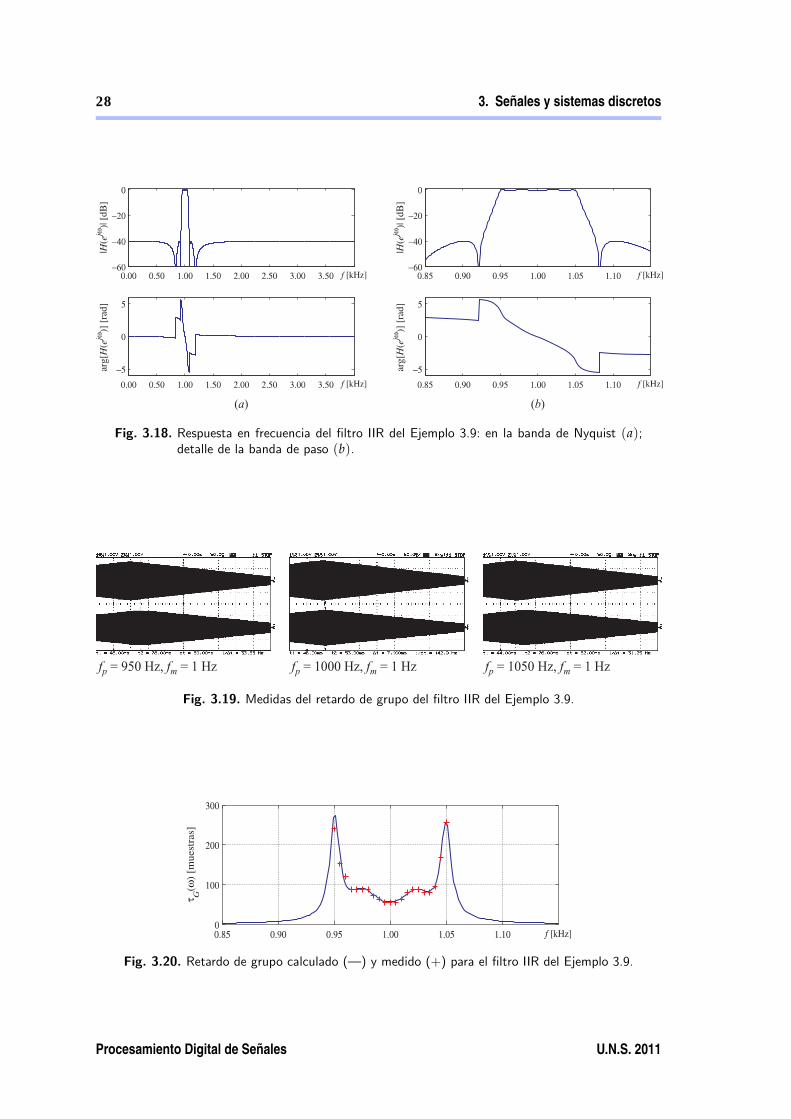
EJEMPLO 3.9. Medición del retardo de grupo de un filtro IIREl filtro se implementa con una aproximación elíptica, que resulta en una función transferencia deorden N = 8,
H(ejω) = 0,010−0,055e−jω+0,154e−j2ω−0,272e−j3ω+0,326e−j4ω−0,272e−j5ω+0,155e−j6ω−0,055e−j7ω+0,010e−j8ω
1−5,604e−jω+15,702e−j2ω−27,498e−j3ω+32,749e−j4ω−26,995e−j5ω+15,133e−j6ω−5,303e−j7ω+0,929e−j8ω
La respuesta en frecuencia en módulo y fase se grafica en la Fig. 3.18(a); la Fig. 3.18(b) muestraun detalle de la banda de paso.
El retardo de grupo se midió utilizando una señal moduladora con forma de onda triangular, yfrecuencia fundamental de 1 Hz, variando la frecuencia de la portadora se varió en pasos de 5 Hzentre 950 y 1050 Hz, como se resume en la tabla siguiente.
retardo de grupofrecuencia calculado medido
Hz rad muestras ms ms
950 0.2375π 279.9 34.98 30955 0.2387π 171.7 21.46 19960 0.2400π 101.5 12.68 15965 0.2412π 87.8 10.97 11970 0.2425π 89.9 11.23 11975 0.2437π 91.5 11.44 11980 0.2450π 85.7 10.71 11985 0.2463π 74.8 9.35 9990 0.2475π 64.6 8.07 8995 0.2488π 58.3 7.28 71000 0.2500π 56.7 7.08 7
retardo de grupofrecuencia calculado medido
Hz rad muestras ms ms
1005 0.2512π 59.6 7.46 71010 0.2525π 66.9 8.36 81015 0.2537π 76.9 9.61 101020 0.2550π 85.5 10.69 111025 0.2563π 88.0 11.01 111030 0.2575π 84.8 10.59 101035 0.2587π 83.7 10.45 101040 0.2600π 99.7 12.46 121045 0.2612π 168.5 21.07 211050 0.2625π 258.7 32.34 32– – – – –
En la Fig. 3.19 se muestran las mediciones correspondientes a las frecuencias de portadora fp = 950Hz, 1000 Hz y 1050 Hz, mientras que en la Fig.3.20 se grafica el retardo de grupo calculado con
Procesamiento Digital de Señales U.N.S. 2011
28 3. Señales y sistemas discretos
Fig. 3.18. Respuesta en frecuencia del filtro IIR del Ejemplo 3.9: en la banda de Nyquist (a);detalle de la banda de paso (b).
Fig. 3.19. Medidas del retardo de grupo del filtro IIR del Ejemplo 3.9.
Fig. 3.20. Retardo de grupo calculado (– ) y medido (+) para el filtro IIR del Ejemplo 3.9.
Procesamiento Digital de Señales U.N.S. 2011
3.4. Retardo de grupo y retardo de fase 29
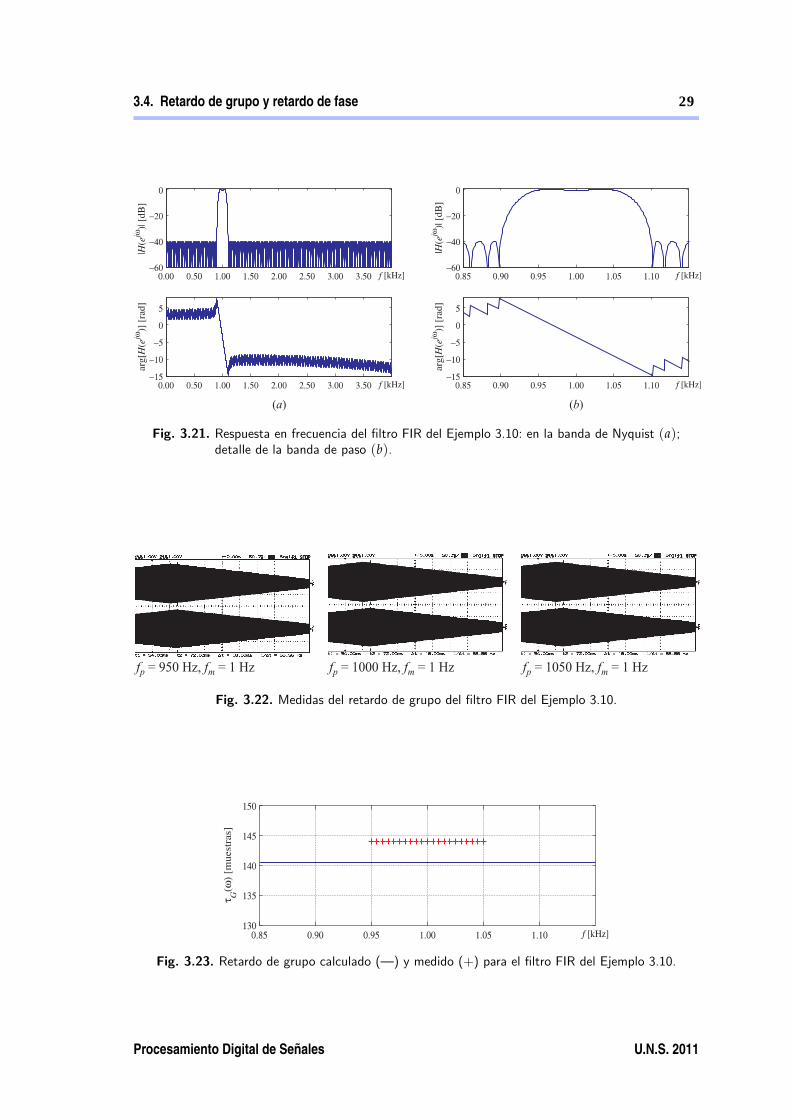
Fig. 3.21. Respuesta en frecuencia del filtro FIR del Ejemplo 3.10: en la banda de Nyquist (a);detalle de la banda de paso (b).
Fig. 3.22. Medidas del retardo de grupo del filtro FIR del Ejemplo 3.10.
Fig. 3.23. Retardo de grupo calculado (– ) y medido (+) para el filtro FIR del Ejemplo 3.10.
Procesamiento Digital de Señales U.N.S. 2011

30 3. Señales y sistemas discretos
Matlab a partir de la función de sistema, junto con los valores medidos (indicados con “+”)observándose que no es constante en función de la frecuencia. �
EJEMPLO 3.10. Medición del retardo de grupo de un filtro FIREl filtro se implementa utilizando un algoritmo óptimo, que resulta en una función transferenciade orden N = 282. La respuesta en frecuencia en módulo y fase se grafica en la Fig. 3.21(a); undetalle de la banda de paso se muestra en la Fig. 3.21(b). La frecuencia de la portadora se varió enpasos de 5 Hz entre 950 y 1050 Hz; la medida del retardo de grupo a tres frecuencias diferentesse muestra en la Fig. 3.22, utilizando una onda moduladora triangular, y período de 1 s. Como larespuesta en fase es lineal, el retardo de grupo resulta constante en función de la frecuencia, y esτG = 141 muestras, como se observa en la Fig. 3.23. En la misma figura se muestra el valor delretardo medido en distintas frecuencias. Se aprecia una ligera diferencia con el valor calculado, quese atribuye a la poca precisión que tiene la medida efectuada con el osciloscopio. �
Procesamiento Digital de Señales U.N.S. 2011