delta v course 7009-10
TRANSCRIPT

FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-1
TM
Conditional Alarms

FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-2
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-3
Objectives
Upon completion of this module you will be able to define
System Alarm Management
Conditional Alarming
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-4
System Alarm Management
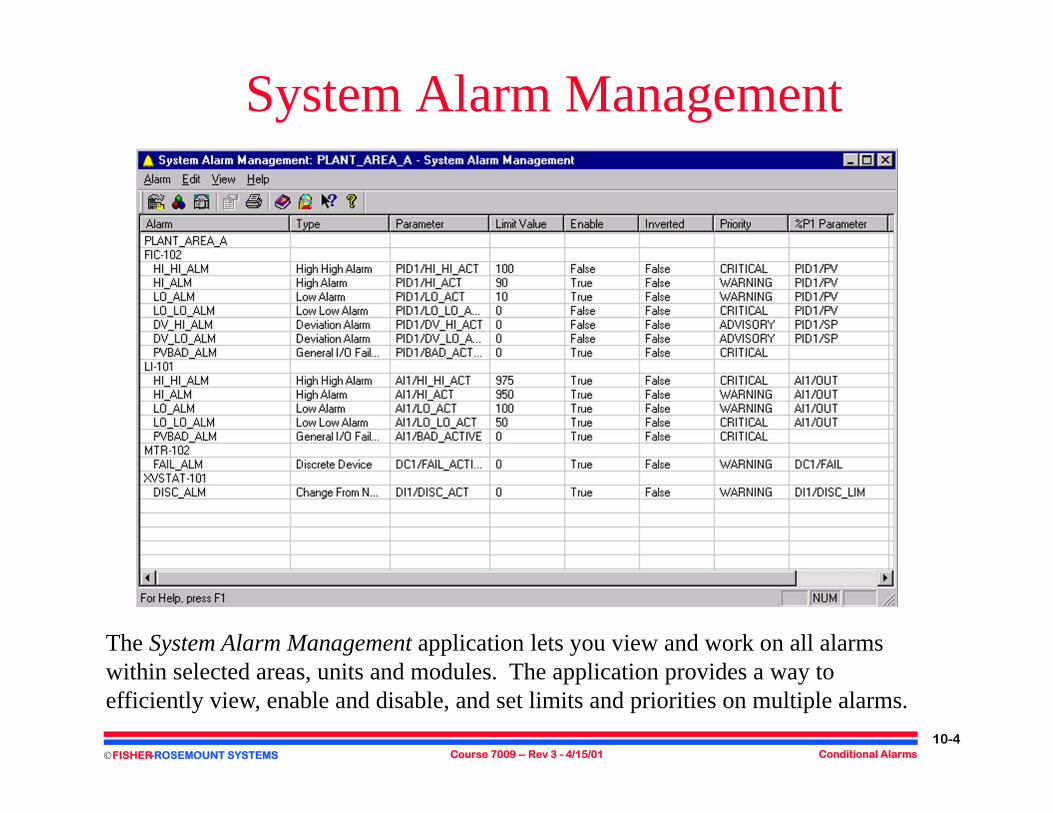
The System Alarm Management application lets you view and work on all alarms within selected areas, units and modules. The application provides a way to efficiently view, enable and disable, and set limits and priorities on multiple alarms.
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-5
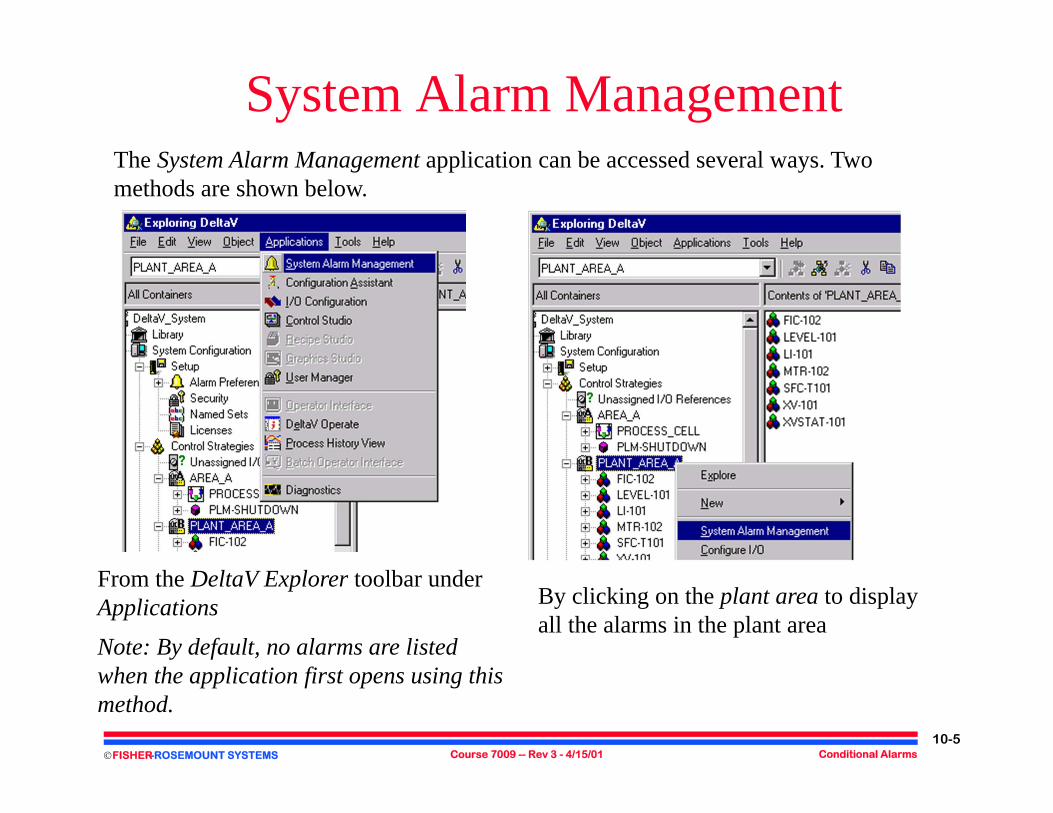
System Alarm ManagementThe System Alarm Management application can be accessed several ways. Two methods are shown below.
From the DeltaV Explorer toolbar under Applications
Note: By default, no alarms are listed when the application first opens using this method.
By clicking on the plant area to display all the alarms in the plant area

FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-6
System Alarm Management
Alarms may be viewed By Area, By Unit and By Module.
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-7
System Alarm Management
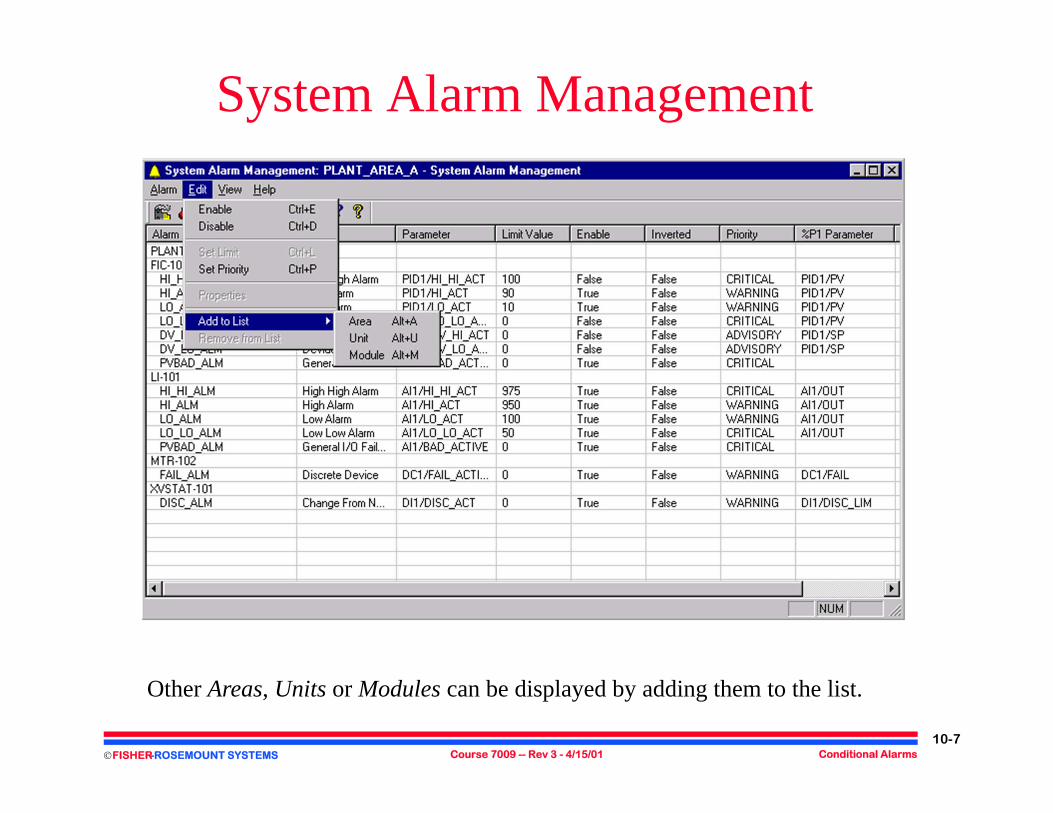
Other Areas, Units or Modules can be displayed by adding them to the list.
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-8
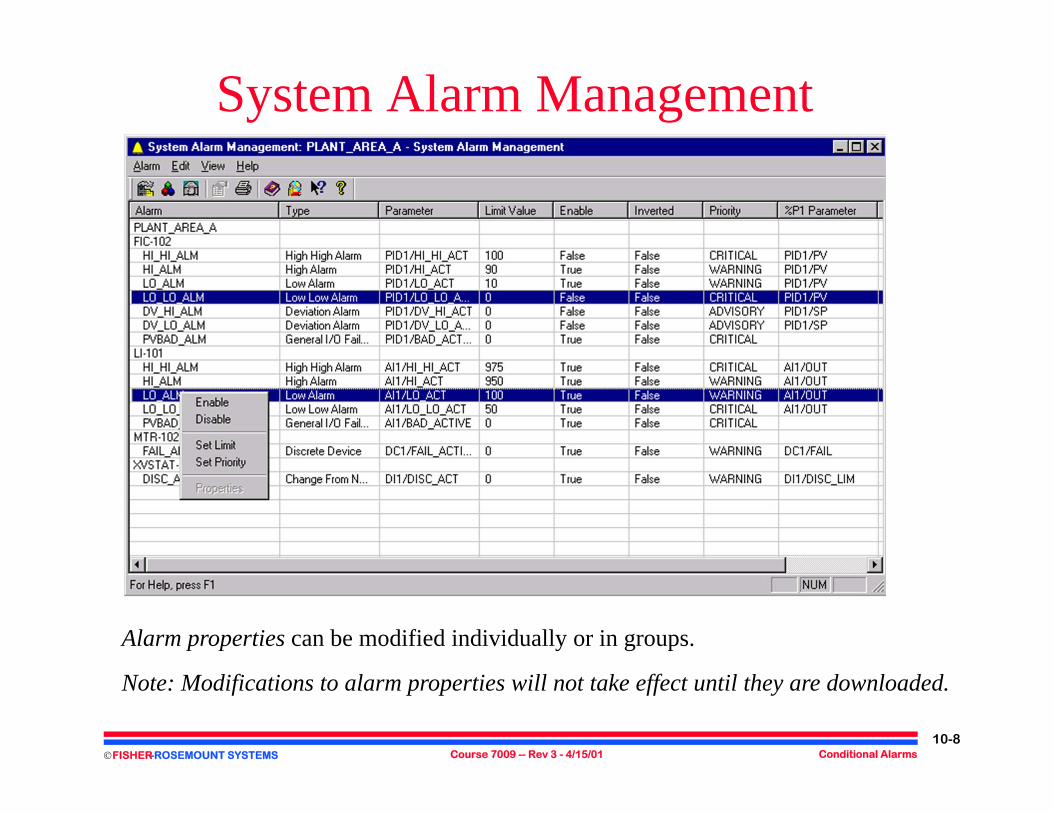
System Alarm Management
Alarm properties can be modified individually or in groups.
Note: Modifications to alarm properties will not take effect until they are downloaded.

FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-9
Conditional AlarmingConditional Alarming enables you to add time delays and enable/disable alarms to minimize nuisance alarms. For example, a low flow alarm is needed for FIC-102. However, we do not want a low flow alarm if the pump is not running. Conditional alarming allows us to disable the alarm if the pump is not running.
The AI, Alarm, Manual Loader, PID, Fuzzy Logic Control and Ratio function blocks support conditional alarming for the standard alarms: HI, HI_HI, LO and LO_LO. The DI function block supports conditional alarming for the DISC alarm.
Conditional Alarming is not supported in function blocks that will be assigned to execute in a fieldbus device.
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-10
Conditional Alarming
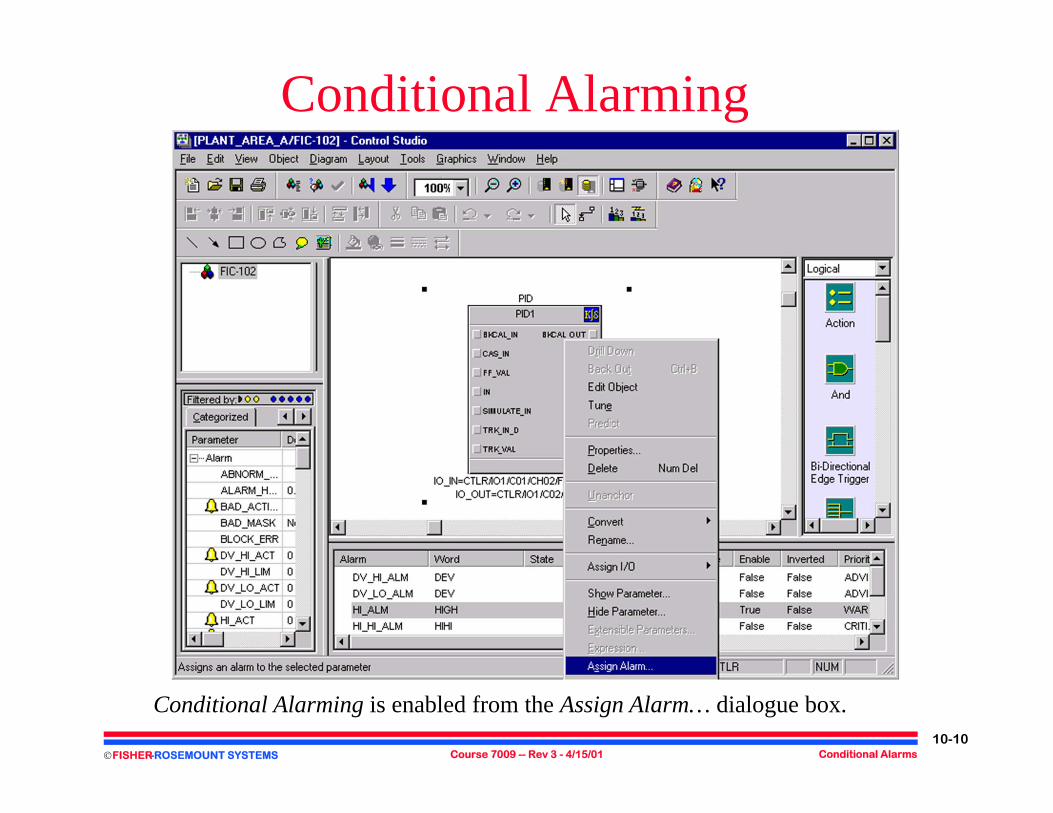
Conditional Alarming is enabled from the Assign Alarm… dialogue box.
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-11
Conditional Alarming
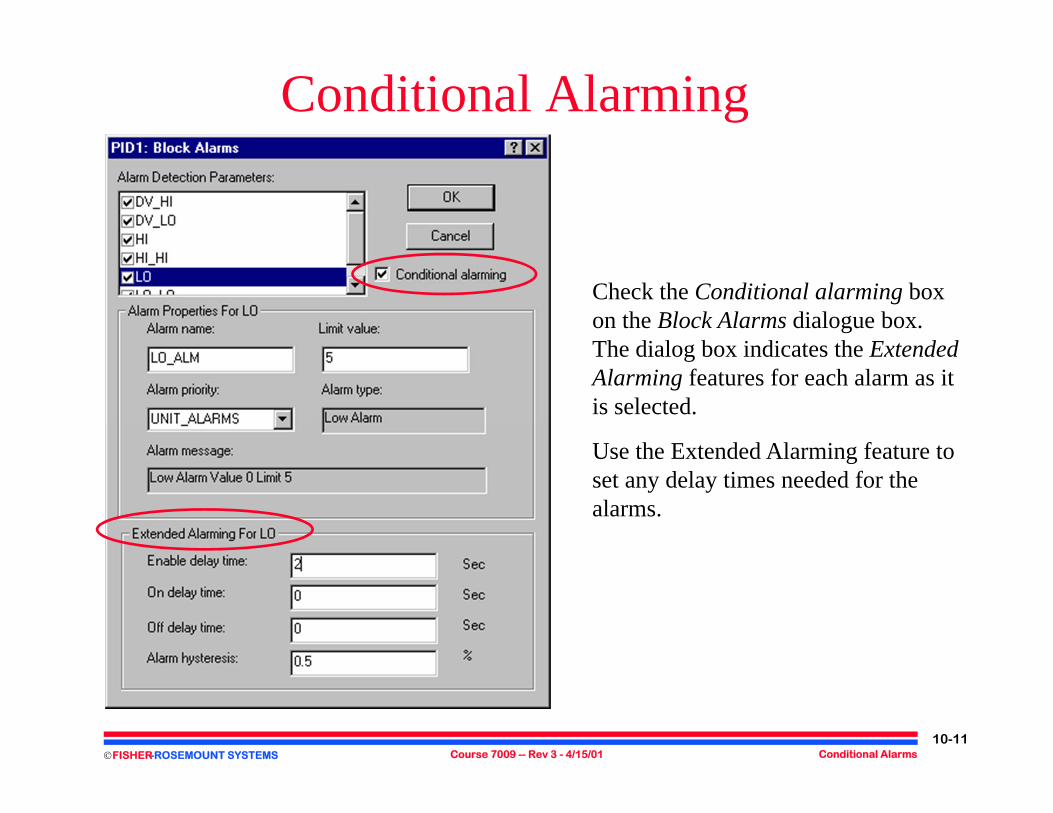
Check the Conditional alarming box on the Block Alarms dialogue box. The dialog box indicates the Extended Alarming features for each alarm as it is selected.
Use the Extended Alarming feature to set any delay times needed for the alarms.
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-12
Conditional Alarming
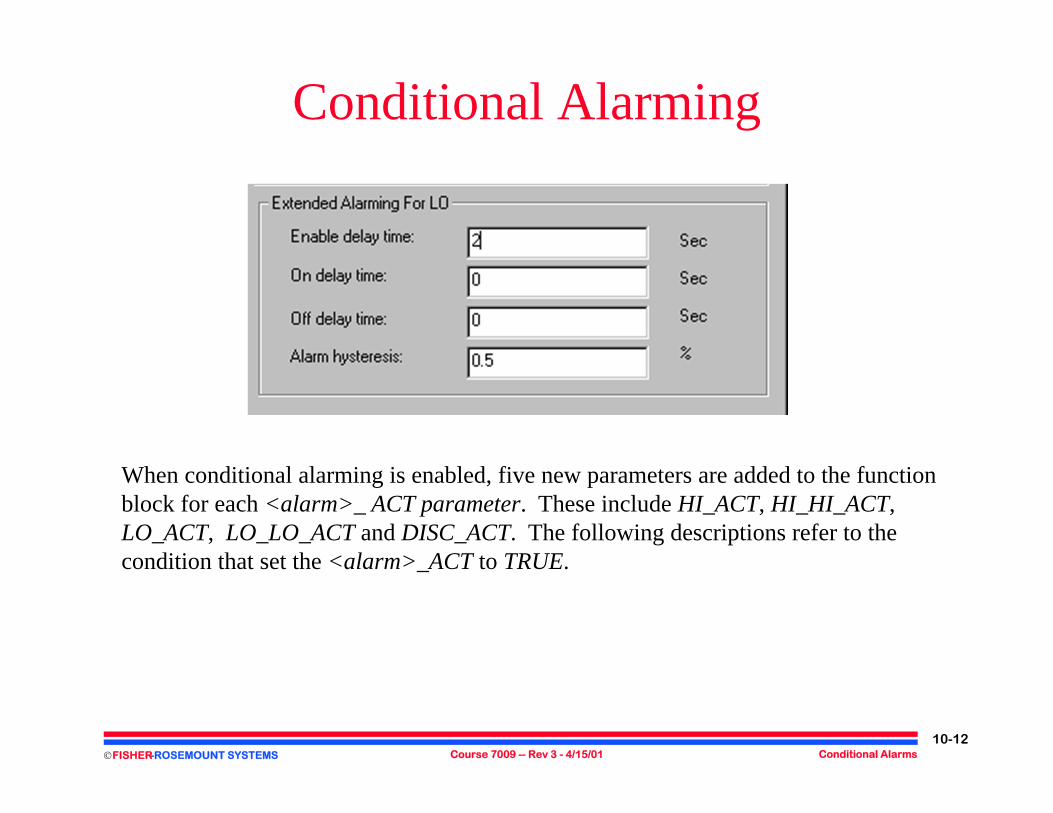
When conditional alarming is enabled, five new parameters are added to the function block for each <alarm>_ ACT parameter. These include HI_ACT, HI_HI_ACT, LO_ACT, LO_LO_ACT and DISC_ACT. The following descriptions refer to the condition that set the <alarm>_ACT to TRUE.
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-13
<alarm>_ENAB - This Boolean parameter enables/disables conditional alarm processing for a single alarm. The default value for this parameter is enabled (1). You can write to the _ENAB parameter to dynamically enable/disable the alarm based on external process conditions.
When <alarm>_ENAB is disabled (0): The <alarm>_ACT parameter is immediately forced to false (0).No alarm process occurs.
<alarm>_DELAY_ON - When conditional alarming has been selected, this parameter delays the time (seconds) that it takes for the <alarm>_ACT to be true (1) after the alarm condition is detected. The timer resets every time the alarm condition clears.
<alarm>_DELAY_OFF – This parameter delays the time (in seconds) that it takes for <alarm>_ACT to be set to false (0) after the alarm condition clears. The timer resets every time the alarm condition is detected.
Conditional Alarming

FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-14
<alarm>_ENAB_DELAY – This parameter delays the time (in seconds) before the alarm processing begins immediately after the <alarm>_ENAB is written to true (1). The <alarm>_ACT parameter is forced to false (0) for the time specified. The timer resets when <alarm>_ENAB goes from 0 to 1.
<alarm>_HYS – This parameter is used as a deadband when resetting base alarm conditions for analog values. The block uses the value of <alarm>_HYS rather than the standard ALARM_HYS on the module.
Conditional Alarming
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-15
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-16
Conditional Alarming
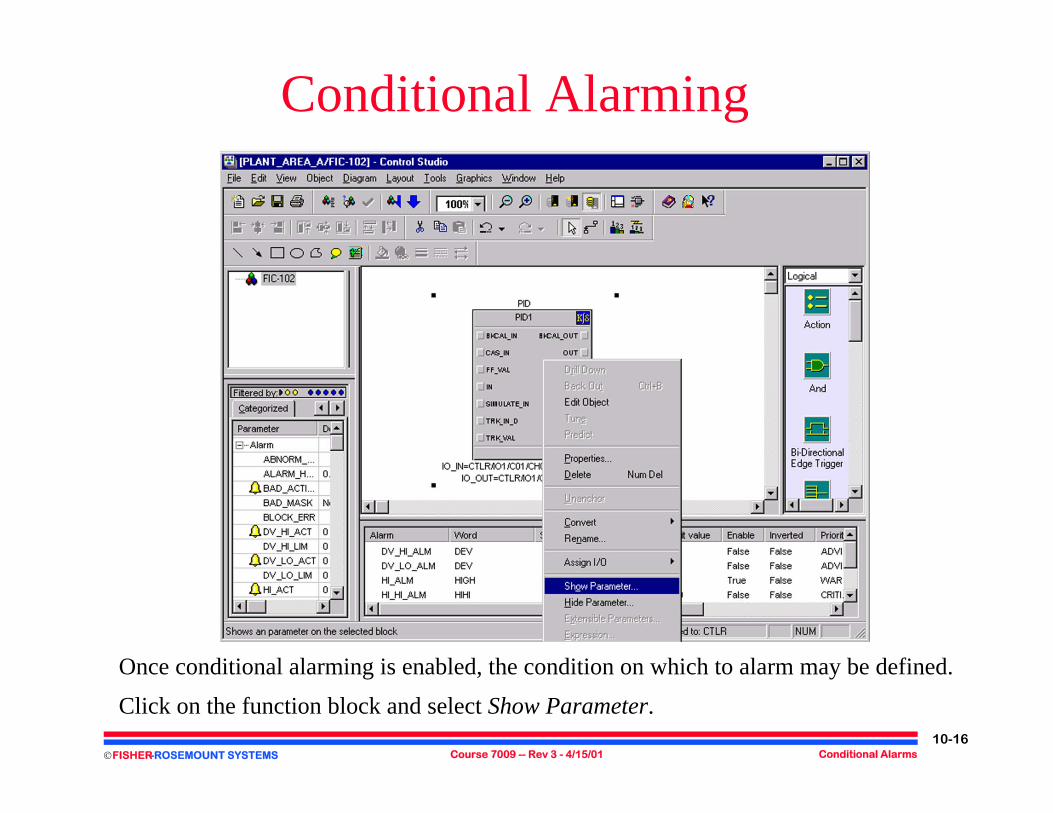
Once conditional alarming is enabled, the condition on which to alarm may be defined.
Click on the function block and select Show Parameter.
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-17
Conditional Alarming
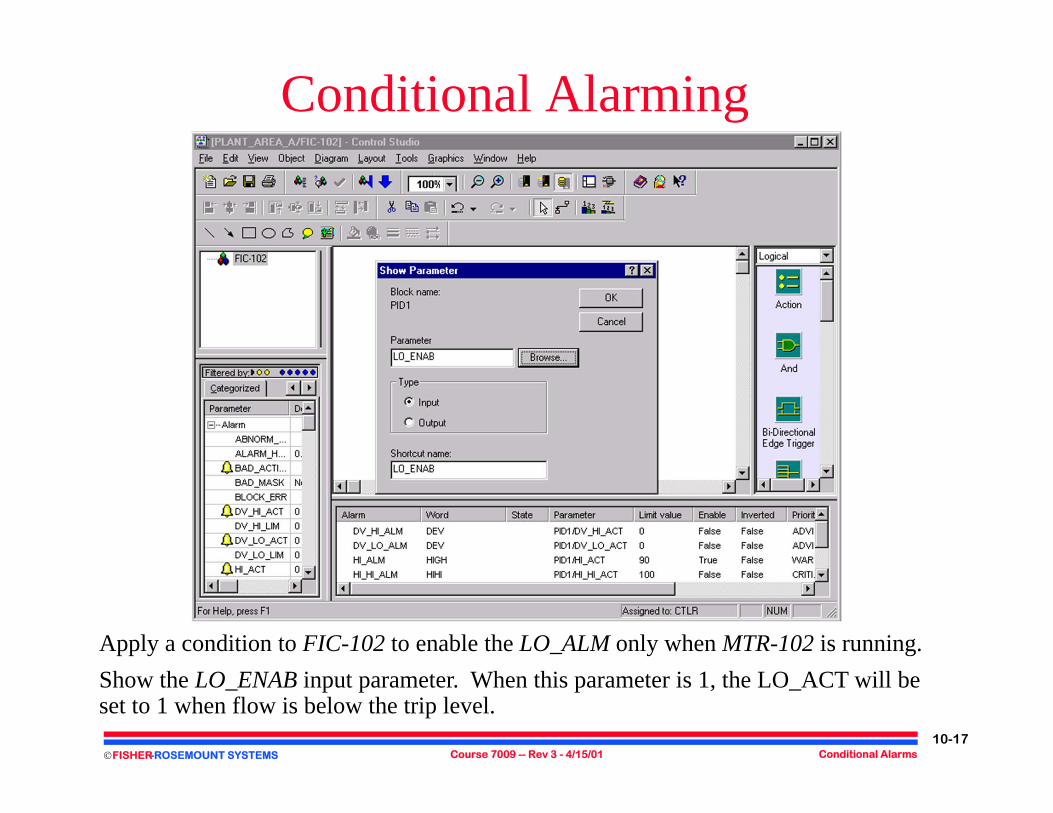
Apply a condition to FIC-102 to enable the LO_ALM only when MTR-102 is running.Show the LO_ENAB input parameter. When this parameter is 1, the LO_ACT will be set to 1 when flow is below the trip level.
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-18
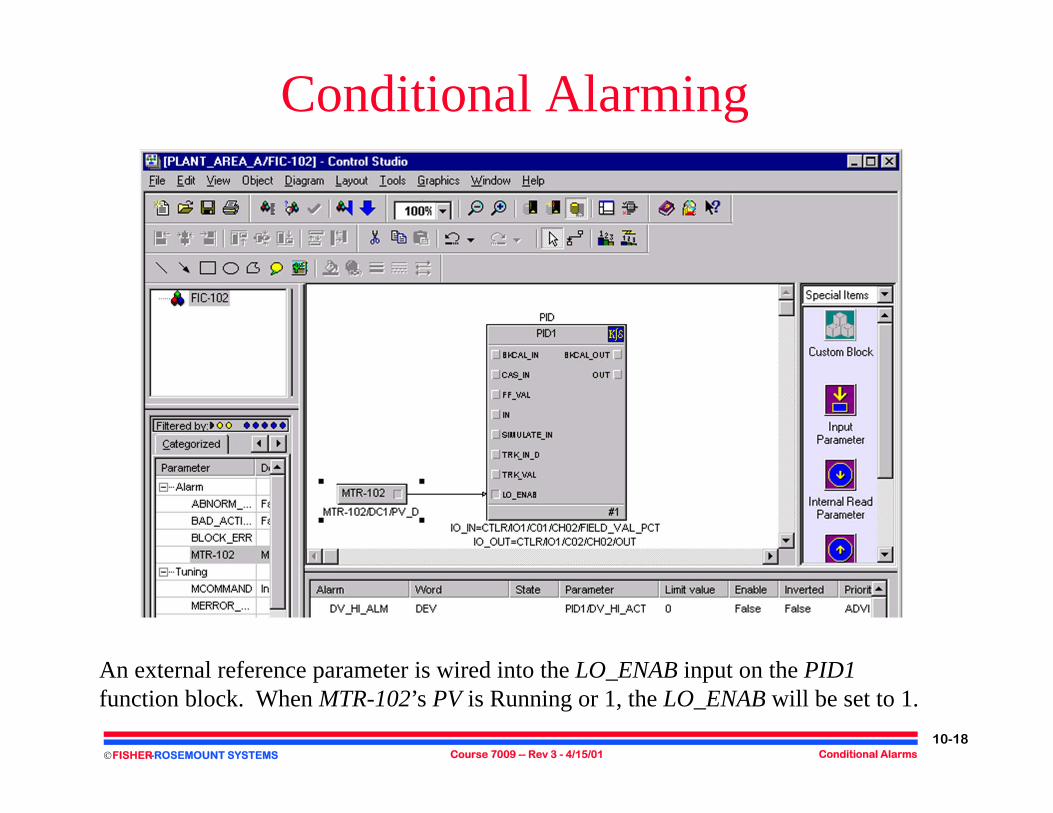
Conditional Alarming
An external reference parameter is wired into the LO_ENAB input on the PID1 function block. When MTR-102’s PV is Running or 1, the LO_ENAB will be set to 1.
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-19
Configuring Conditional Alarm
While the level alarms are valid, FIC-102’s low alarm is a nuisance unless the pump, MTR-102, is running. In the following exercise, you will configure a conditional on the LO_ALM of FIC-102 to only enable when the motor is running.
Conditional Alarm Workshop
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-20
Step 1. Open FIC-102 in Control Studio.
Step 2. Right Click the PID1 block and select Assign Alarm…
Step 3. Check the Conditional alarming option. The dialogue will extend to enable configuration of conditional alarms.
Step 4. Select the LO parameter and verify that the limit value is 10. No delays are necessary for this alarm. Select OK to continue and save your control studio session.
Step 5. Right click on the PID1 block and select Show Parameter….
Step 6. Browse and select the LO_ENAB parameter, an input parameter, from the list.
Conditional Alarm Workshop
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-21
Step 7. Add an Input Parameter to your diagram. Name the parameter MTR-102and set the type to External Reference. Assign the category to Alarm. Set the parameter path to MTR-102/DC1/PV_D.
Step 8. Connect the input parameter to LO_ENAB on the PID1 block. Only when the input is 1 (pump is running) will the LO_ACTbe enabled.
Step 9. Save and Download FIC-102.
Step 10. Verify that the LO_ALM for FIC-102 is not triggered unless the pump is running.
Conditional Alarm Workshop
FISHER-ROSEMOUNT SYSTEMS Conditional AlarmsCourse 7009 -- Rev 3 - 4/15/0110-22