copyright © 2005. shi ping cuc chapter 2 discrete-time signals and systems content the...
TRANSCRIPT

Copyright © 2005. Shi Ping CUC
Chapter 2Discrete-Time Signals and Systems
Content
The Discrete-Time Signal: Sequence
The Discrete-Time System
The Discrete-Time Fourier Transform (DTFT)
The Symmetric Properties of the DTFT
System Function and Frequency Response

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Elementary sequences
Unit sample sequence
0,0
0,1)(
n
nn
0
00 ,0
,1)(
nn
nnnn

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Unit step sequence
0,0
0,1)(
n
nnu
0
00 ,0
,1)(
nn
nnnnu
)1()()( nunun
0
)()(m
mnnu

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Rectangular sequence
otherwise
NnnRN ,0
10,1)(
)()()( NnununRN
1
0
)()(N
mN mnnR

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Sinusoidal sequence
nnAnx ),cos()( 0
amplitude
digital angular frequency
phase
A
0
)205.0sin(5.1)()205.0cos(5.1)(
2
1
nnxnnx

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Real-valued exponential sequence
Rananx n ;,)(
The is convergent when 1|| a)(nx
The is divergent when 1|| a)(nx
n
n
nx
nx
8.02.0)(
2.1001.0)(
2
1

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Complex-valued exponential sequence
nenx nj ,)( )( 0
)()(
sincos)( 00
njxnx
njenenx
imre
nn
Attenuation factor
njenx
)85
1(2)(

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Classification of sequences
Finite-length sequence
)(nx
21 NnN is defined only for a finite time interval:
where 21 ,NN
examples 88,)( 2 nnnxnny 4.0cos)(
The length of a finite-length sequence can be increased by zero-padding

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Right-sided sequence
)(nx1Nn has zero-valued samples for
where 1N
If , a right-sided sequence is called a causal sequence
01 N

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Left-sided sequence
)(nx2Nn has zero-valued samples for
where 2N
If , a left-sided sequence is called a anti-causal sequence
02 N

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Two-sided sequence
)(nx is defined for any n
a dual-sided sequence can be seen as the sum of a right-sided sequence and a left-sided sequence.

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Absolutely summable sequence
n
nx )(
Example:
0,0
0,3.0)(
n
nnx
n
42857.13.01
13.0
0n
n

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Square-summable sequence
n
nx2
)(
Example: nnnx 3.0sin)(
It is square-summable but not absolutely summable

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Operations on sequence
Time-shifting operation
)()( Nnxny where is an integerN
delaying operation0N
advance operation0N
z-1)(nx )1()( nxnyUnit delay
z)(nx )1()( nxnyUnit advance

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Time-reversal (folding) operation
)()( nxny
Addition operation
)(nx )()()( nwnxny Adder
)(nw
Sample-by-sample addition )()()( nwnxny

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Scaling operation
)()( nAxny )(nx )()( nAxny Multiplier A
Product (modulation) operation
)(nx )()()( nwnxny modulator
)(nw
Sample-by-sample multiplication )()()( nwnxny

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Sample summation
Sample production
2
1
)()()( 21
n
nn
nxnxnx
)()()( 21
2
1
nxnxnxn
nn

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Sequence energy
Sequence power
nn
x nxnxnxE 2* |)(|)()(
1
0
2|)(|1
limN
nN
x nxN
P

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Decimation by a factor D
)()( Dnxnxd
Every D-th samples of the input sequence are kept and others are removed:

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Interpolation by a factor I
otherwise ,0
2 , ,0 ),()( IInI
nxnxp
I -1 equidistant zeros-valued samples are inserted between each two consecutive samples of the input sequence.

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
The periodicity of sequence
then the is called a periodic sequence,
and the value of N is called the fundamental period.
)(nx
a periodic sequence is usually expressed as
)(~ nx Nnx ))((
)()( kNnxnx if: any integerk: positive integerN

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
The periodicity of sinusoidal sequence
)cos()( 0 nAnx
)cos()( 00 NnANnx
k
NorkN
00
22
If , : any integerN k
is a periodic sequence and its period is)(nx
0
2
k
N 0
min2N

Copyright © 2005. Shi Ping CUC
0min
2
N0
2
If is a integer
0
2
If is a noninteger rational number
QNkP
QkN
P
Q min
00
22
0
2
If is a irrational number
is an aperiodic sequence)(nx
)cos()( 0 nAnx

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
The periodicity of Complex-valued exponential sequence
when , the periodicity of Complex-valued exponential sequence is the same as the sinusoidal sequence
0
njene
enxnn
nj
00
)(
sincos
)( 0

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
The periodicity of sinusoidal sequence which is developed by uniformly sampling a continuous-time sinusoidal signal
)cos()( 0 tAtx
)cos(
)2
cos(
)cos()()(
0
0
0
nA
nA
nTAtxnx
T
nTt
Analog angular frequency0
Sampling periodT
Sampling angular frequencyT
Digital angular frequency0

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
ss f
f
fT 0
000 21
Sampling period : seconds/sample
Analog frequency : hertz (Hz)
Analog angular frequency : radians/second
Digital angular frequency : radians/sample
0
T
0
0f
Units:

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
The periodicity:
TT
TfTfT0
0000
1 212122
If is a rational number, then 0
2
P
Q
0
2
0PTQT PQ, are positive integers
T0T The period of the continuous-time sinusoidal signal
The sampling period

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Sequence synthesis
Any arbitrary sequence can be synthesized in the time-domain as a weighted sum of delayed (advanced) and scaled unit sample sequence.
Unit sample synthesis
k
knkxnx )()()(

Copyright © 2005. Shi Ping CUC
The Discrete-Time Signal: Sequences
Any arbitrary real-valued sequence can be decomposed into its even and odd component:
Even and odd synthesis
return
)()()( nxnxnx oe
)]()([21)(
)]()([21)(
nxnxnx
nxnxnx
o
e
)()( nxnx ee Even (symmetric):
)()( nxnx oo Odd (antisymmetric):

Copyright © 2005. Shi Ping CUC
The Discrete-Time System
A discrete-time system processes a given input
sequence x(n) to generate an output sequence y(n)
with more desirable properties.
Mathematically, an operation T [ • ] is used.
y(n) = T [ x(n) ]
x(n): excitation, input signal
y(n): response, output signal
Introduction
example
example

Copyright © 2005. Shi Ping CUC
The Discrete-Time System
Classification
Linear System
Time-Invariant (Shift-Invariant) System
Linear Time-Invariant (LTI) System
Causal System
Stable System

Copyright © 2005. Shi Ping CUC
The Discrete-Time System
Linear System
A system is called linear if it has two mathematical properties: homogeneity and additivity.
)]([)]([)]()([ 2121 nxTnxTnxnxT
)]([)]([ nxaTnaxT
)]([)]([)]()([ 22112211 nxTanxTanxanxaT
Accumulator

Copyright © 2005. Shi Ping CUC
The Discrete-Time System
Time-Invariant (Shift-Invariant) System
)()]([ then
)()]([ if
00 nnynnxT
nynxT
Accumulator

Copyright © 2005. Shi Ping CUC
The Discrete-Time System
Linear Time-Invariant (LTI) System
A accumulator is an LTI system !
A system satisfying both the linearity and the time-
invariance properties is called an LTI system.
LTI systems are mathematically easy to analyze and
characterize, and consequently, easy to design.

Copyright © 2005. Shi Ping CUC
The Discrete-Time System
The output of an LTI system is called
linear convolution sum
)(*)()()()]([)( nhnxknhkxnxLTInyk
An LTI system is completely characterized in the time domain by the impulse response h(n).
example

Copyright © 2005. Shi Ping CUC
The Discrete-Time System
Causal System
For a causal system, changes in output samples do not precede changes in the input samples.
In a causal system, the -th output sample
depends only on input samples for and
does not depend on input samples for
0n
)(nx 0nn
0nn
)2()1()()( 321 nxanxanxanye.g.

Copyright © 2005. Shi Ping CUC
The Discrete-Time System
An LTI system will be a causal system if and only if :
0,0)( nnh
An ideal low-pass filter is not a causal system !
0,0)( nnx
A sequence is called a causal sequence if :)(nx

Copyright © 2005. Shi Ping CUC
The Discrete-Time System
Stable System
A system is said to be bounded-input bounded-output
(BIBO) stable if every bounded input produces a
bounded output, i.e.
PnyMnx )( then ,)( if
An LTI system will be a stable system if and only if :
n
nhS )(

Copyright © 2005. Shi Ping CUC
The Discrete-Time System
The M-point moving average filter is BIBO
stable :
1
0
)(1
)(M
k
knxM
ny
A causal LTI discrete-time system:
stablenot is system the 1,|| ifstable is system the 1,|| if
)()( nunh n
prove
prove

Copyright © 2005. Shi Ping CUC
The Discrete-Time System
Causal and Stable System
)(
)()()(
n
nh
nunhnh
A system is said to be a causal and stable system if
the impulse response is causal and absolutely
summable , i.e.
)(nh
return

Copyright © 2005. Shi Ping CUC
The Discrete-time Fourier Transform (DTFT)
The transform-domain representation of discrete-time signal
● Discrete-Time Fourier Transorm (DTFT)
● Discrete-Fourier Transform (DFT)
● z-Transform

Copyright © 2005. Shi Ping CUC
The Discrete-time Fourier Transform (DTFT)
The definition of DTFT
dweeXeXIDTFTnx jwnjwjw )(
2
1)]([)(IDTFT:
Existence condition:
|)(| nx
DTFT:
n
jwnjw enxnxDTFTeX )()]([)(

Copyright © 2005. Shi Ping CUC
The Discrete-time Fourier Transform (DTFT)
The comparison of vs.)(nx )( jeX
Time domain Frequency domain
discrete continuous
Real valued Complex-valued
Summation integral
)(nx )( jeX

Copyright © 2005. Shi Ping CUC
The Discrete-time Fourier Transform (DTFT)
About )( jeX
● It is a periodic function of with a period of 2
The range of
The integral range of
~ ~
● It can be expressed as )()()( jjj eeXeX
)( jeX magnitude function
)( phase function
)(and are all real function of)( jeX example

Copyright © 2005. Shi Ping CUC
The Discrete-time Fourier Transform (DTFT)
DTFT vs. z Transform
n
nj
ez
j
enx
zXeX j
)(
)()(

Copyright © 2005. Shi Ping CUC
The Discrete-time Fourier Transform (DTFT)
The general properties of DTFT
Linearity
The DTFT is a linear transformation
)()()()( jj ebYeaXnbynax
Time shifting
A shift in the time domain corresponds to the phase shifting
)()( jmj eXemnx

Copyright © 2005. Shi Ping CUC
The Discrete-time Fourier Transform (DTFT)
Frequency shifting
Multiplication by a complex exponential corresponds to a shift in the frequency domain
)()( )( 00 jjn eXnxe
Convolution Convolution in time domain corresponds to
multiplication in frequency domain
)()()()( 2121jwjw eXeXnxnx

Copyright © 2005. Shi Ping CUC
The Discrete-time Fourier Transform (DTFT)
Energy (Parseval’s Theorem)
deXnx j
n
22)(
2
1)(
Multiplication
deXeXnxnx wjj )()(2
1)()( )(
2121
2)( jeX energy density spectrum

Copyright © 2005. Shi Ping CUC
The Discrete-time Fourier Transform (DTFT)
Sequence weighting
)]([)(
jeX
d
djnxn
Multiplied by an exponential sequence
)()( jn ea
Xnxa1

Copyright © 2005. Shi Ping CUC
The Discrete-time Fourier Transform (DTFT)
Conjugation Conjugation in the time domain corresponds to the
folding and conjugation in the frequency domain
)()( jeXnx Folding Folding in the time domain corresponds to the folding
in the frequency domain)()( jeXnx
Conjugation and Folding Conjugation and folding in the time domain corresponds
to the conjugation in the frequency domain
)()( jeXnx return

Copyright © 2005. Shi Ping CUC
The symmetric properties of the DTFT
Conjugate symmetric sequence: )()( nxnx ee
Conjugate antisymmetric sequence: )()( nxnx oo
For real-valued sequence, it is even symmetric:
)()( nxnx ee
Conjugate symmetry of )(nx
)()( nxnx oo For real-valued sequence, it is odd symmetric:

Copyright © 2005. Shi Ping CUC
The symmetric properties of the DTFT
)()()( nxnxnx oe
Any arbitrary sequence can be expressed as the sum of a conjugate symmetric sequence and a conjugate antisymmetric sequence
)]()([2
1)(
)]()([2
1)(
nxnxnx
nxnxnx
o
e

Copyright © 2005. Shi Ping CUC
The symmetric properties of the DTFT
Conjugate symmetry of )( jeX
)()()( jo
je
j eXeXeX
The can be expressed as the sum of the conjugate symmetric component and the conjugate antisymmetric component
)( jeX
)]()([2
1)(
)]()([2
1)(
jjjo
jjje
eXeXeX
eXeXeX

Copyright © 2005. Shi Ping CUC
The symmetric properties of the DTFT
)()( je
je eXeX -conjugate symmetric
)()( jo
jo eXeX conjugate antisymmetric
)()( je
je eXeX -
For real-valued function, it is even symmetric
)()( jo
jo eXeX
For real-valued function, it is odd symmetric

Copyright © 2005. Shi Ping CUC
The symmetric properties of the DTFT
The symmetric properties of the DTFT
)](Im[ )(
)](Re[ )(
)( )](Im[
)( )](Re[
jo
je
jo
je
eXjnx
eXnx
eXnxj
eXnx
Implication: If the sequence is real and even, then is also real and even.)( jeX
)(nx

Copyright © 2005. Shi Ping CUC
The symmetric properties of the DTFT
)](arg[)](arg[
)( )(
)](Im[)](Im[
)](Re[ )](Re[
)()(
jj
jj
jj
jj
jj
eXeX
eXeX
eXeX
eXeX
eXeX
If the sequence x(n) is real, then
example

Copyright © 2005. Shi Ping CUC
The symmetric properties of the DTFT
The DTFT of periodic sequences
The DTFT of complex-valued exponential sequences
)(
)2(2)(
)( )(
0
0
0
i
j
nj
ieX
nenx

Copyright © 2005. Shi Ping CUC
The symmetric properties of the DTFT
The DTFT of constant-value sequences
i
j ieX
nnx
)2(2)(
)(- 1)(

Copyright © 2005. Shi Ping CUC
The symmetric properties of the DTFT
The DTFT of unit sample sequences
k
j
i
kNN
eX
iNnnx
)2
(2
)(
)()(

Copyright © 2005. Shi Ping CUC
The symmetric properties of the DTFT
return
The DTFT of general periodic sequences
k
k
kNj
j
ii
kN
kXN
kN
eXN
eX
iNnnxiNnxnx
)2
()(~2
)2
()(2
)(
)()()()(~
2

Copyright © 2005. Shi Ping CUC
The representation of a LTI system
Impulse response
Difference equation
System function
)(nh
M
mm
N
kk mnxbknya
00
)()(
)(zH
System Function and Frequency Response

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
System function (Transfer function)
The z-transform of the impulse response h(n) of the LTI
system is called system function or transfer function
)()()(
)()]([)(
zXzYzH
znhnhΖzHn
n

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
The region of convergence (ROC) for H(z)
An LTI system is stable if and only if the unit circle is in
the ROC of H(z)
An LTI system is causal if and only if the ROC of H(z) is
|| zRx
An LTI system is both stable and causal if and only if the H(z) has all its poles inside the unit circle, i.e. the ROC of H(z) is
|| 1 z

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
System function vs. difference equation
M
mm
N
kk mnxbknya
00
)()(difference equation
take z-transform for both sides
M
m
mm
N
k
kk zXzbzYza
00
)()(
N
kk
M
mm
N
k
kk
M
m
mm
zd
zcK
za
zb
zX
zYzH
1
1
1
1
0
0
)1(
)1(
)(
)()(

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
Frequency response of an LTI system
n
njj enheH )()(
The DTFT of an impulse response is called the frequency response of an LTI system, i.e.
)](arg[)()( jeHjjj eeHeH
magnitude response function)( jeH
phase response function)](arg[ jeH
example
example

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
deHd j
g
)](arg[ )(
Group delays
)( jeH In general, the frequency response is a complex function of
is a continuous function of )( jeH
is a periodic function of , the period is 2)( jeH

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
Response to exponential sequence
)( jeHnjenx 0)( )()( 00 jnj eHeny
The output sequence is the input exponential sequence
modified by the response of the system at frequency 0

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
Response to sinusoidal sequences
)( jeH)(nx )(ny
)])(arg[cos(|)(|)(
)cos()(00
0
0
jj eHneHAny
nAnx
))](arg[cos(|)(|)(
)cos()(
k
jkk
jk
kkkk
kk eHneHAny
nAnx

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
Response to arbitrary sequences
)( ),( nheH j)(nx )(ny
)()()( jjj eHeXeY
)()()( nhnxny

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
Geometric interpretation of frequency response
N
kk
M
mm
MN
N
kk
M
mm
N
k
kk
M
m
mm
dz
czKz
zd
zcK
za
zb
zX
zYzH
1
1)(
1
1
1
1
0
0
)(
)(
)1(
)1(
)(
)()(

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
)](arg[
1
1)(
)(
)(
)()(
jeHjj
N
kk
j
M
mm
j
MNjj
eeH
de
ceKeeH
K is a real number

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
N
kk
j
M
mm
j
j
de
ceKeH
1
1
)(
)()(
k
m
jkk
jk
jmm
jm
eldeD
eceC
zero vector
pole vector

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
)(]arg[
]arg[]arg[)](arg[
1
1
MNde
ceKeH
M
mk
j
M
mm
jj
k
m
jkk
jk
jmm
jm
eldeD
eceC
zero vector
pole vector

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
)(]arg[)](arg[
)(
11
1
1
MNKeH
lKeH
N
kk
M
mm
j
N
kk
M
mm
j

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
An approximate plot of the magnitude and phase responses of the system function of an LTI system can be developed by examining the pole and zero locations
To highly attenuate signal components in a specified frequency range, we need to place zeros very close to or on the unit circle in this range
To highly emphasize signal components in a specified frequency range, we need to place poles very close to or on the unit circle in this range

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
11
2
2
2l
2
1 1l
22
23
je
N
kk
M
mm
j
lKeH
1
1)(

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
Minimum-Phase and Maximum-Phase system
)()(
arg11
MNKeH N
kk
M
mm
j
the number of zeros inside the unit circleim
the number of zeros outside the unit circleom
the number of poles outside the unit circleopthe number of poles inside the unit circleip
oi ppN oi mmM

Copyright © 2005. Shi Ping CUC
A causal stable system with all zeros inside the unit circle is called a minimum-phase delayed system
A causal stable system with all zeros outside the unit circle is called a maximum-phase delayed system
Npp io ,0 A causal stable system
oi
ii
j
mMm
MNpmK
eH
2 2 2
)(222)(
arg2
0)(
arg2
KeH j
MKeH j
2)(
arg2

Copyright © 2005. Shi Ping CUC
An anti-causal stable system with all zeros inside the unit circle is called a maximum-phase advanced system
An anti-causal stable system with all zeros outside the unit circle is called a minimum-phase advanced system
o
j
pNKeH
22)(
arg2
)(2)(2)(
arg2
oo
j
mpMNKeH
Npp oi ,0 An anti-causal stable system
)(22)(
arg2
MNmKeH
i
j

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
Important properties of minimum-phase delayed system
Any nonminimum-phase system can be expressed as the product of a minimum-phase system function and a stable all-pass system
minimum-phase delayed system is often called minimum-phase system for short. It plays an important role in telecommunications
1 ,|)(||)(|
|)(||)(|
0
2min
0
2
1
0
2min
1
0
2
N-mnhnh
nhnh
m
n
m
n
N
n
N
n
|)(| jeH For all systems with the identical

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
All-pass system Definition
A system that has a constant magnitude response for all frequencies, that is,
0 1|)(| ,jap eH
kzzH )(The simplest example of an all-pass system is a pure delay system with system function
This system passes all signals without modification except for a delay of k samples.

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
1-th order all-pass system
10 , , 1
)(1
1
rreaazazzH j
ap
1)sin()cos(1)sin()cos(1
11
1)(
)(
)(
jrrjrr
reree
erereeeH
j
jj
jj
jjj
ap

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
An alternative form of 1-th order all-pass system
10 , , 1
)(1)(
1
11
rreaaz
zazH j
ap
1)( reH jap
a1
a
]Re[z
]Im[zj
Mirror image symmetry with respect to the unit circle

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
2-th order all-pass system
10 , , 11
)(1
1
1
1
rreaza
az
az
azzH j
ap
10 , , 1
1
1
)(1)(
1
11
1
11
rreaza
za
az
zazH j
ap
1)( jap eH
2)( reH jap
example

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
example
)()(
cos21cos21
cos21cos2
11)(
12
221
222
221
212
1
1
1
1
zDzD
zzrrzzrrzz
zrrzrrzz
zaaz
azazzHap
10 , rrealet j
221 cos21)( zrrzzD

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
N-th order all-pass system
)(
)(
1
1)(
1
)1(1
11
)1(1
11
11
1
zD
zDz
zdzdzd
zzdzdd
za
azzH
N
NN
NN
NNNN
N
k k
kap
)()( jj eDeD
1)( jeH

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
An alternative form for N-th order all-pass system
CR N
k kk
kkN
k k
kap zbzb
bzbz
za
azzH
111
11
11
1
)1)(1(
))((
1)(
RN The number of real poles and zeros
CN The number of complex-conjugate pair of poles and zeros
For causal and stable system 1|| ,1|| kk ba

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
Application
When placed in cascade with a system that has an undesired phase response, a phase equalizer is designed to compensate for the poor phase characteristics of the system and therefore to produce an overall linear-phase response.
)()()( zHzHzH dap
Phase equalizers

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
)]()([)()(
)()()(
dapjjd
jap
jd
jap
j
eeHeH
eHeHeH
0)()(
)](arg[ )(
dap
j
d
eHd
Group delays
)()()](arg[ dap
jeH

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
)()()( min zHzHzH ap
Any causal-stable nonminimum-phase system can be expressed as the product of a minimum-phase delayed system cascaded with a stable all-pass system
)()()()( 111
oo zzzzzHzH
a minimum-phase system )(1 zH
a pair of conjugate zeros outside the unit circle oo zz
1 ,
1
1|| oz
example

Copyright © 2005. Shi Ping CUC
)()(
11)1()1()(
1
1
1
1)()()()(
min
1
1
1
111
1
1
1
1
111
1
zHzH
zz
zz
zz
zzzzzzzH
zz
zz
zz
zzzzzzzHzH
ap
o
o
o
ooo
o
o
o
ooo
)1()1()( 111
zzzzzH oo is a minimum-phase system
1
1
1
1
11
zz
zz
zz
zz
o
o
o
ois a 2-th all-pass system

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
By cascading an all-pass system an unstable system can be made stable without changing its magnitude response
11
)(1
1
1
1
za
az
az
azzHap
example
)()()( zHzHzH ap
unstable system)(zH
stable system)(zH

Copyright © 2005. Shi Ping CUC
System Function and Frequency Response
Relationships between system representations
return
)(zH
)(nhDifference Equation
)( jeH
Inverse ZT
ZT
DTFT
Inverse DTFT
Express H(z) in z-1 cross multiply and take inverse
take ZT solve for Y/X
Take DTFT solve for Y/X
jez substitute

Copyright © 2005. Shi Ping CUC
-10 -5 0 5 10 15 200
0.2
0.4
0.6
0.8
1
n
Am
plit
ud
e
unit sample sequence
-10 -5 0 5 10 15 200
0.2
0.4
0.6
0.8
1
n
Am
plit
ud
e
return
)(n
)5( n

Copyright © 2005. Shi Ping CUC
-5 0 5 10 15 200
0.2
0.4
0.6
0.8
1
n
Am
plit
ud
e
unit step sequence
-5 0 5 10 15 200
0.2
0.4
0.6
0.8
1
n
Am
plit
ud
e
return
)(nu
)5( nu

Copyright © 2005. Shi Ping CUC
-5 0 5 10 15 200
0.2
0.4
0.6
0.8
1
n
Am
plit
ud
e
unit step sequence
-5 0 5 10 15 200
0.2
0.4
0.6
0.8
1
n
Am
plit
ud
e
Rectangular sequence
return
)(10 nR
)5(10 nR

Copyright © 2005. Shi Ping CUC
0 10 20 30 40 50 60-2
-1
0
1
2
n
Am
plit
ud
e
Sinusoidal sequence
0 10 20 30 40 50 60-2
-1
0
1
2
n
Am
plit
ud
e
return
) 205.0cos(5.1 n
) 205.0sin(5.1 n

Copyright © 2005. Shi Ping CUC
0 5 10 15 20 25 300
0.05
0.1
0.15
0.2
0.25
n
Am
plit
ud
e
Sinusoidal sequence
0 5 10 15 20 25 300
0.05
0.1
0.15
0.2
n
Am
plit
ud
e
Real-valued exponential sequence
return
n2.1001.0
n8.02.0

Copyright © 2005. Shi Ping CUC
0 5 10 15 20 25 30 35-0.5
0
0.5
1
1.5
2
n
Am
plit
ud
e
real part
0 5 10 15 20 25 30 35-0.5
0
0.5
1
1.5
n
Am
plit
ud
e
imaginary part
Complex-valued exponential sequence
return
nje
)85
1(2

Copyright © 2005. Shi Ping CUC
-20 -15 -10 -5 0 5 10 15 200
20
40
60
80
n
Am
plit
ud
e
finite-length sequence
-20 -15 -10 -5 0 5 10 15 20-1
-0.5
0
0.5
1
n
Am
plit
ud
e
infinite-length sequence
return
)8(172 nRn
)4.0cos( n

Copyright © 2005. Shi Ping CUC
-10 -5 0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
n
Am
plit
ud
e
right-sided sequence
-10 -5 0 5 10 15 20 25 300
0.05
0.1
0.15
0.2
n
Am
plit
ud
e
causal sequence
)5(8.02.0 nun
return
)(8.02.0 nun

Copyright © 2005. Shi Ping CUC
-30 -25 -20 -15 -10 -5 0 5 100
0.2
0.4
0.6
0.8
n
Am
plit
ud
e
left-sided sequence
-30 -25 -20 -15 -10 -5 0 5 100
0.05
0.1
0.15
0.2
n
Am
plit
ud
e
anti-causal sequence
)5(8.02.0 nun
return
)(8.02.0 nun

Copyright © 2005. Shi Ping CUC
-20 -15 -10 -5 0 5 10 15 200
0.05
0.1
0.15
0.2
n
Am
plit
ud
e
two-sided sequence
-20 -15 -10 -5 0 5 10 15 20-0.2
-0.1
0
0.1
0.2
n
Am
plit
ud
e
two-sided sequence
||8.02.0 n
return
)3.0cos(2.0 n

Copyright © 2005. Shi Ping CUC
-5 0 5 10 15 20 25 30 350
0.2
0.4
0.6
0.8
1
n
Am
plit
ud
e
absolutely summable sequence
-5 0 5 10 15 20 25 30 350
0.2
0.4
0.6
0.8
1
n
Am
plit
ud
e
absolutely summable sequence
)(3.0 nun
return
)(85.0 nun

Copyright © 2005. Shi Ping CUC
-20 -15 -10 -5 0 5 10 15 20-0.05
0
0.05
0.1
0.15
n
Am
plit
ud
e
square-summable sequence
-20 -15 -10 -5 0 5 10 15 20-0.05
0
0.05
0.1
0.15
0.2
n
Am
plit
ud
e
square-summable sequence
nn3.0sin
return
nn6.0sin

Copyright © 2005. Shi Ping CUC
-10 -5 0 5 10 15 20 25 300
0.1
0.2
n
Am
plit
ud
e
original sequence
-10 -5 0 5 10 15 20 25 300
0.1
0.2
n
Am
plit
ud
e
delayed sequence
-10 -5 0 5 10 15 20 25 300
0.1
0.2
n
Am
plit
ud
e
advanced sequence
Time-shifting operation )(8.02.0 nun
return
)5(8.02.0 5 nun
)5(8.02.0 5 nun

Copyright © 2005. Shi Ping CUC
-20 -15 -10 -5 0 5 10 15 200
0.2
0.4
0.6
0.8
1
n
Am
plit
ud
e
original sequence
-20 -15 -10 -5 0 5 10 15 200
0.2
0.4
0.6
0.8
1
n
Am
plit
ud
e
folding sequence
folding operation
)(8.0 nun
return
)(8.0 nun

Copyright © 2005. Shi Ping CUC
0 5 10 15 20 25 30 35 400
0.5
1
n
Am
plit
ud
e
x1(n)
0 5 10 15 20 25 30 35 40-1
0
1
n
Am
plit
ud
e
x2(n)
0 5 10 15 20 25 30 35 40-1
0
1
2
n
Am
plit
ud
e
x1(n)+x2(n)
addition operation
)(8.0 nun
return
)()2.0cos( nun
)()2.0cos()(8.0 nunnun

Copyright © 2005. Shi Ping CUC
0 20 40 60 80 100 120 140 160-0.1
0
0.1A
mp
litu
de
x1(n)
0 20 40 60 80 100 120 140 160-1
0
1
Am
plit
ud
e
x2(n)
0 20 40 60 80 100 120 140 160-0.1
0
0.1
Am
plit
ud
e
x1(n)*x2(n)
modulation operation n0125.0sin1.0
return
n125.0sin
)()( 21 nxnx

Copyright © 2005. Shi Ping CUC
0 10 20 30 40 50 60 70 80 90-1
-0.5
0
0.5
1
n
Am
plit
ud
e
periodic sequence
0 10 20 30 40 50 60 70 80 90-1
-0.5
0
0.5
1
n
Am
plit
ud
e
periodic sequence
periodic sequence)
8sin( n
return
)16
sin( n

Copyright © 2005. Shi Ping CUC
0 10 20 30 40 50 60 70 80 90-1
0
1
Am
plit
ud
e
x1(n)
0 10 20 30 40 50 60 70 80 90-1
0
1
Am
plit
ud
e
x2(n)
0 10 20 30 40 50 60 70 80 90-1
0
1
Am
plit
ud
e
x3(n)
Periodicity of sequence )8
sin( n
return
)103sin( n
)4.0sin( n
Copyright © 2005. Shi Ping CUC
0 10 20 30 40 50 60-1
-0.5
0
0.5
1A
mp
litu
de
0 10 20 30 40 50 60-1
-0.5
0
0.5
1
Am
plit
ud
e
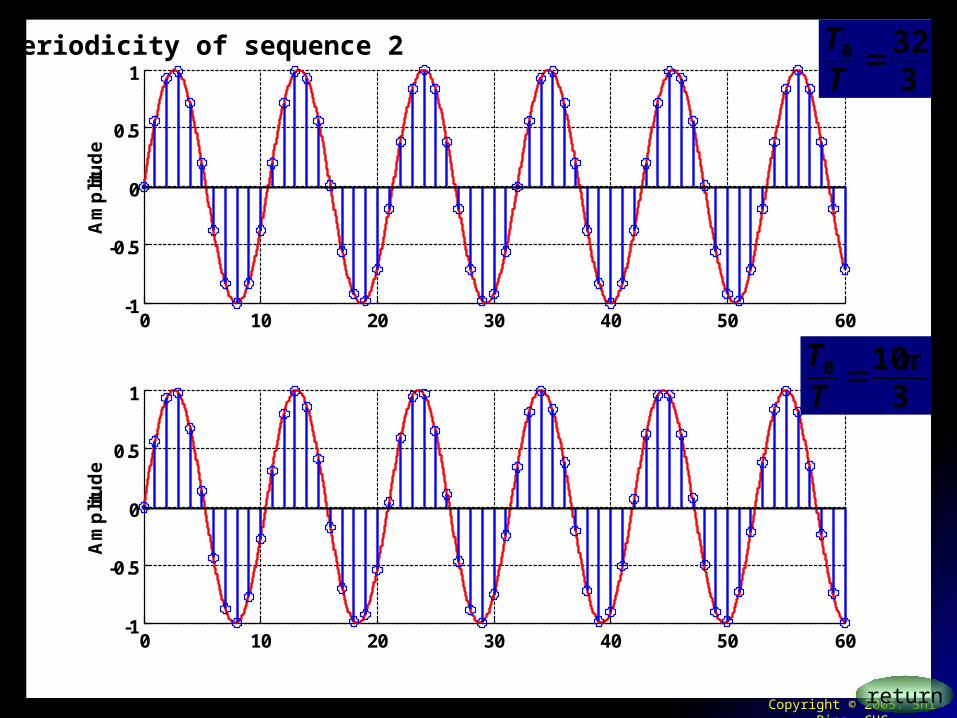
Periodicity of sequence 23320
TT
return
3100
TT

Copyright © 2005. Shi Ping CUC
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 200
1
2
3
4
5
6
7
8
9
10
11
12
)7(9)6(11)5(10)4(8
)3(6)2(3)1(4)(
nnnnnn
nn
return

Copyright © 2005. Shi Ping CUC
-20 -15 -10 -5 0 5 10 15 200
5
10
Am
plit
ud
e
x(n)
-20 -15 -10 -5 0 5 10 15 200
2
4
6
Am
plit
ud
e
xe(n)
-20 -15 -10 -5 0 5 10 15 20-5
0
5
Am
plit
ud
e
xo(n)
return
n9.0

Copyright © 2005. Shi Ping CUC
Accumulator
The input-output relation can also be written in the form:
This form is used for a causal input sequence, in which case y(-1) is called the initial condition
)()1()()()()(1
nxnynxlxlxnyn
l
n
l
0 ,)()1()()()(00
1
nlxylxlxny
n
l
n
ll
The output at time instant n is the sum of the input sample at time instant n and the previous output at time instant n-1, which is the sum of all previous input sample values from to n-1
)(ny)(nx )1( ny
return

Copyright © 2005. Shi Ping CUC
M-point moving-average system
1
0
)(1)(M
k
knxM
ny
An application: consider )()()( ndnsnx
return
Where is the signal, and is a random noise)(ns )(nd
nnns 9.02)( 8M
7
0
)(81)(k
knxny

Copyright © 2005. Shi Ping CUC
0 5 10 15 20 25 30 35 40 45 500
5
10
Am
plit
ud
e
s(n),d(n)
0 5 10 15 20 25 30 35 40 45 500
5
10
Am
plit
ud
e
x(n)
0 5 10 15 20 25 30 35 40 45 500
5
10
Am
plit
ud
e
y(n)
return
nnns 9.02)(

Copyright © 2005. Shi Ping CUC
Accumulator
Hence, the above system is linear
)()]([ ,)()]([ 2211
n
l
n
l
lxnxTlxnxT
return
)]([)]([)()(
)]()([)]()([
2121
2121
nxbTnxaTlxblxa
lbxlaxnbxnaxT
n
l
n
l
n
l
)()(
n
l
lxny

Copyright © 2005. Shi Ping CUC
Accumulator
Hence, the above system is time-invariant
)]([)()(
)()]([
knxTlxkny
lxknxT
kn
l
kn
l
return
)()(
n
l
lxny

Copyright © 2005. Shi Ping CUC
0 5 10 15 20 25 30 35 40 45 500
0.5
1
1.5
Am
plit
ud
e
x(n)
0 5 10 15 20 25 30 35 40 45 500
0.5
1
1.5
Am
plit
ud
e
h(n)
0 5 10 15 20 25 30 35 40 45 500
5
10
Am
plit
ud
e
y(n)
return
)(9.0)( nunh n
)()( 10 nRnx
)()()( nhnxny

Copyright © 2005. Shi Ping CUCreturn
The M-point moving average filter
1
0
)(1)(M
k
knxM
ny
For a bounded input , we havexBnx )(
xx
M
k
M
k
BMBM
knxM
knxM
ny
)(1
)(1)(1)(1
0
1
0
Hence, the M-point moving average filter is BIBO stable

Copyright © 2005. Shi Ping CUCreturn
A causal LTI discrete-time system
stablenot is system the 1,|| ifstable is system the 1,|| if
)()( nunh n
1|| 1
1||)( ||0
aif
aanuaS
n
n
n
n

Copyright © 2005. Shi Ping CUC
-2 -1 0 1 20
2
4
6
8
pi
Am
plit
ud
e
Amplitude part
-2 -1 0 1 2-0.5
0
0.5
pi
ph
as
e(p
i)
phase part
-2 -1 0 1 20
2
4
6
8
pi
Am
plit
ud
e
real part
-2 -1 0 1 2-5
0
5
pi
Am
plit
ud
e
imaginary part
return
)](9.0[DTFT 113/ nRe jnn

Copyright © 2005. Shi Ping CUC
-1 -0.5 0 0.5 10
2
4
6
8
pi
Am
plit
ud
e
Amplitude part
-1 -0.5 0 0.5 1-0.5
0
0.5
pi
ph
as
e(p
i)
phase part
-1 -0.5 0 0.5 10
2
4
6
8
pi
Am
plit
ud
e
real part
-1 -0.5 0 0.5 1-5
0
5
pi
Am
plit
ud
e
imaginary part
return
)](9.0[DTFT 11 nRn

Copyright © 2005. Shi Ping CUC
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Ima
gin
ary
Pa
rt81.09.0
1)(2
zz
zzH

Copyright © 2005. Shi Ping CUC
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
pi
Am
plit
ud
e
Amplitude response
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1
-0.5
0
0.5
1
pi
ph
as
e(p
i)
phase response
return
81.09.01)(
2 zz
zzH

Copyright © 2005. Shi Ping CUC
-1 -0.5 0 0.5 1 1.5 2
-1
-0.5
0
0.5
1
Real Part
Ima
gin
ary
Pa
rt
21
1
251
2419
127
)(
zz
zzH

Copyright © 2005. Shi Ping CUC
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.3
0.35
0.4
0.45
0.5
0.55
pi
Am
plit
ud
e
Amplitude response
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.4
-0.3
-0.2
-0.1
0
pi
ph
as
e(p
i)
phase response
21
1
251
2419
127
)(
zz
zzH
return

Copyright © 2005. Shi Ping CUC
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-1.5
-1
-0.5
0
0.5
1
1.5
Real Part
Ima
gin
ary
Pa
rt
return
)3
,21(
11)(
1
1
1
1
r
zaaz
azazzHap
a1
a
a
a1
Mirror image symmetry

Copyright © 2005. Shi Ping CUC
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Ima
gin
ary
Pa
rt
2
return
21
4321
48.012.11
83.085.108.361.21)(
zz
zzzzzH
oz
1
oz1

Copyright © 2005. Shi Ping CUC
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Ima
gin
ary
Pa
rt
2
return
oz
1
oz1
oz
oz

Copyright © 2005. Shi Ping CUC
oz
1
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Ima
gin
ary
Pa
rt
return
21
21
26.241.21
35.083.01)(
zz
zzzH
a
1
a1
a
a