control activo acustico estructural. una …physionet.cps.unizar.es/~car/doc_internos/ia0.pdf ·...
TRANSCRIPT

PROGRAMA NACIONAL DE I+D EN MEDIO AMBIENTE
Proyecto AMB99-1095-C02-01
Control activo acústico estructural del ruido de baja frecuencia en elinterior de medios de transporte
Informe Nº 0
CONTROL ACTIVO ACUSTICO ESTRUCTURAL. UNAREVISION DEL ESTADO DEL ARTE
Septiembre 2000
Pedro Cobo ParraMaría Cuesta Ruiz
Instituto de Acústica. CSIC.Serrano 144. 28006 Madrid

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
1
A continuación se hace ua revisión de las publicaciones en el campo del Control Activo AcústicoEstructural (CAAE). Se trata de hacer una ficha de cada uno de los trabajos publicados sobre estetema. En cada ficha figurarán, además de la referencia del trabajo, unas claves que sirvan paraidentificarlo en el contexto de este estudio general. Por ejemplo, interesa conocer el problemaque trata y las aplicaciones que tiene. Si es teórico exclusivamente, o por el contrario, si contieneresultados experimentales. Si hace referencia a algún sistema comercial existente. Cada fichacontiene también un resumen del trabajo revisado. Al final de la revisión se hará un análisisglobal por años, aplicaciones que contempla, revistas en las que se publica, etc.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
2
Autores: R. Kinss
Título: Active and passive control of machinery noise un future warships: a ship designer’sviewpoint
Revista: Proc. UDT Año: 1988 Vol(Num): Páginas:352-359
Problema: Ruido en barcos Aplicación: control local de lasvibraciones
Teórico/Experimental: tutorial Sistema comercial: No
Extrapolación: No Filtro:
Resumen: El autor hace aquí una revisión de las técnicas pasivas y activas para reducir elruido en barcos de guerra. Estos barcos han de ser más silenciosos cada dia, tanto en ruidoradiado como en ruido propio. El ruido radiado puede conducir a una localización lejana por unbuque enemigo. El ruido propio reduce la capacidad de funcionamiento del sonar, tanto enoperación activa como pasiva. Las líneas espectrales, asociadas casi siempre a la maquinariainstalada en el barco, son de vital importancia en la firma de un barco, y sirven paraidentificarlo. Por tanto, reducir esas líneas espectrales es de transcendental importancia. Aquí esdonde tiene más importancia el control activo.
El autor reinvidica que el control activo, al que califica como una tecnología de importanciaemergente, tendrá un papel determinante en problemas asociados con aspectos concretos delruido de maquinaria y en ciertas vías de propagación. Las fuerzas fluctuantes, causa de lageneración de ruido en un barco, se originan en la transmisión a través de los calzos de lamaquinaria, a través de los ejes rotantes, conexiones flexibles de las tuberías, y en el golpeo delruido aéreo en el casco del barco. A velocidades altas, hay que considerar además el ruido deflujo hidrodinámico y el de propulsión. Incluso a frecuencias bajas, una fuerza puntual excitaun gran número de grados de libertad acústicos. La firma de ruido de un barco a una sólafrecuencia resulta de un gran número de fuerzas fluctuantes actuando en paralelo. Por tanto, noes razonable esperar una reducción significativa de la firma del barco simplemente actuandocon un número limitado de fuerzas secundarias sobre su estructura, aun cuando estas fuerzasestén óptimamente controladas en amplitud y fase a cada frecuencia. Esta discusión tiene uncierto paralelismo con la de control local o global en un recinto. Aquí podríamos decir que elcontrol global no es muy viable, debido a la complejidad del campo de ruido, pero el controllocal tiene una aplicación importante en problemas concretos de ruido.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
3
Autores: C. Deffayet and P.A. Nelson
Título: Active control of low frequency harmonic sound radiated by a finite panel
Revista: JASA Año: 1988 Vol(Num): 84(6) Pág: 2192-2199
Problema: CAR radiado por un panel finito Aplicación:
Teórico/Experimental: Teórico Sistema comercial: No
Extrapolación: No Filtro: No
Resumen : Se aplica la teoría de optimización cuadrática para determinar la potencia acústicade salida mínima de un panel soportado sencillamente, cuando se utiliza una serie de fuentessecundarias puntuales para controlar el ruido radiado. La fuente de ruido primaria es un panelrectangular que se supone vibrando en la dirección de uno de sus modos normales.Considerando que las dimensiones del panel son pequeñas en comparación con la longitud deonda acústica se puede trabajar en el margen de baja frecuencia. En aproximación de campolejano este panel puede sustituirse por cuatro fuentes monopolares situadas en las esquinas delpanel. Dependiendo de los modos de radiación el sistema puede considerarse cuatro monopolosradiando en fase, dos dipolos en fase o bien un cuadrupolo. Para minimizar la potencia en cadauno de estos casos es necesario utilizar una fuente secundaria del mismo tipo.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
4
Autores: M.C. McGary
Título: A new diagnostic method for separating airborne and structureborne noise radiated byplates with applications for propeller driven aircraft
Revista: JASA Año: 1988 Vol(Num): 84(3) Pág: 830-840
Problema: Distinción de ruido radiado porfuente acústica y fuente de vibraciones
Aplicación: Industria aerospacial
Teórico/Experimental: ambos Sistema comercial: No
Extrapolación: No Filtro: No
Resumen : El objetivo de este trabajo ha sido presentar la base teórica, procedimiento demedidas y una validación experimental, de un nuevo método basado en la medida con unasonda de la intensidad acústica radiada por paneles aerospaciales sobre los que actúan unafuente acústica y una fuente de vibración, que permite distinguir y predecir estas componentesdel ruido radiado.
El modelo propone una estimación matemática de las potencias sonoras acústica (en aire) yvibracional, cada una de las cuales está en función de su eficiencia de radiación, y términoscruzados que aparecen cuando las dos fuentes actúan a la vez. Los pasos que sigue el modeloson:
• Determinar a partir de las ecuaciones propuestas, la eficiencia de radiación de la estructuracuando solamente actúa la fuente sonora.
• Hacer lo mismo cuando solo se radia a consecuencia de una vibración de la estructura.• Medir de la potencia acústica total radiada cuando las dos fuentes actúan juntas, y utilizar
los dos resultados anteriores, para predecir las dos contribuciones a ésta.
El modelo se valida experimentalmente en un panel de aluminio, rectangular y ligeramenteamortiguado, sobre el que actúa de manera predominante la fuente acústica (altavoz en su cajade resonancia). Un shaker en una esquina, ejerce una pequeña vibración. Los resultadosobtenidos demuestran que el modelo predice con bastante acierto la componente predominanteen la potencia acústica en toda la anda de frecuencias, y proporciona una interesanteinformación sobre la interacción de las dos fuentes de ruido cuando los términos cruzados delas ecuaciones se vuelven significativos.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
5
Autores: G.V. Bargiotti
Título: The power radiated by a vibrating body in an acoustic fluid and its determination from
boundary measurements
Revista: J.A.S.A. Año:1990 Vol.(Num.): 88 (4) Páginas: 1884-1893
Problema: Modos radiantes Aplicaciones: CAAE cilindros
Filtro: No Teórico/experimental: Teórico
Sistema comercial: No Otros:
Resumen: Este es un trabajo clásico sobre descomposición de alguna matriz de las que intervienen
en el problema de la radiación acústica de superficies vibrantes en modos radiantes. Se trata de una
formulación armónica, válida por tanto a una frecuencia pura.
Se trata de un artículo teórico sobre el problema analítico de la descomposición del campo acústico
radiado en valores y vectores propios. La diagonalización del campo de velocidad en la superficie
en valores singulares identifica una serie de patrones de velocidad ortonormales, cada uno de ellos
correspondiente a un patrón en el campo lejano. Los valores singulares son indicadores de la
eficiencia de radiación de cada uno de los patrones de velocidad de la base. Los patrones de
velocidad con alta eficiencia de radiación forman una subserie, cuya dimensión depende del tamaño
y de la forma de la superficie vibrante. Los otros patrones de velocidad de la base no radian
eficientemente y contribuyen fundamentalmente al campo evanescente en las cercanías de la
superficie vibrante. Así pues, los patrones de velocidad que radian eficientemente constituyen unaa
serie de funciones de filtrado espacial, separando las componentes radiantes y no radiantes del
campo de velocidad de la superficie.
Se ilustra el método calculando los primeros 10 patrones de velocidad singular de un cilindro
definido por los parámetros adimensionales k/a=1 y L/a=13. Existen 8 patrones de velocidad con
eficiencias comprendidas en –20 dB.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
6
Autores: D.R. Thomas, P.A. Nelson, and S.J. Elliott
Título: Experiments on the active control of the transmission of sound through a clampedrectangular plate
Revista: JSV Año: 1990 Vol(Num): 139(2) Páginas:351-355
Problema: Control CAAE del ruidotransmitido
Aplicación: Aislamiento acústico
Teórico/Experimental: Experimental Sistema comercial: No
Extrapolación: No Filtro: ME FX-LMS
Resumen: Se presentan los resultados de un experimento CAR realizado en unas cámaras detransmisión. En una cámara pequeña (152 m3) se sitúa un altavoz que radia un ruido armónicode frecuencia fundamental comprendida entre 80 y 100 Hz. En una cámara adyacente másgrande (348 m3) se distribuyen aleatoriamente 24 micrófonos. Las frecuencia de Schröeder dela cámara grande es de 60 Hz, por lo que estamos en condiciones de campo difuso. La funciónde coste para el sistema CAR es la suma de las presiones al cuadrado en los 24 micrófonos.Entre las dos cámaras existe un panel sobre el que se sitúan tres actuadores electrodinámicos. Elsistema CAR multicanal para reducir la transmisión del ruido ya fue usado por el equipo delISVR para reducir el ruido en el interior de una cabina de avión.
Se presentan resultados experimentales de la reducción del ruido como una función de lafrecuencia:
• Variando la posición de la fuente primaria en la cámara pequeña (bastante dependencia).• Variando la posición de la fuente secundaria sobre el panel (apenas afecta).• Para 1,2, o tres fuentes secundarias (apenas afecta).
En todos los casos, se consigue una reducción que pasa por una serie alternada de máximos(unos 15 dB) y mínimos (0 dB). Se concluye que es posible el control CAAE del ruidotransmitido, pero que es necesario investigar más este problema.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
7
Autores: X.-Q. Bao, V.K. Varadan, V.V. Varadan, and T.R. Howarth
Título: Model of bilaminar actuator for active acoustic control systems
Revista: J.A.S.A. Año: 1990 Vol(Num): 87(3) Páginas:1350-1352
Problema: Actuador para control de lareflexion/transmision
Aplicación: Ruido submarino
Teórico/Experimental: Numérico Sistema comercial:
Extrapolación: Filtro: Realimentación
Resumen: En este trabajo se presenta un actuador de doble capa (bilaminal) capaz de cancelarsimultáneamente la reflexión y la transmisión de una onda plana en incidencia normal. Elmaterial del actuador es un piezocomposite 1-3. El modelo analítico del actuador está basado enel circuito eléctrico equivalente de Mason. El modelo proporciona las ecuaciones querelacionan las presiones de la onda incidente, de la onda reflejada, y de la onda transmitida conlos voltajes aplicados a las capas A y B. La estrategia de control consiste en calcular VA de talmodo que pr sea cero, y VB de tal modo que pt sea cero. Es decir, se usa la primera capa paracancelar la reflexión, y la segunda capa para cancelar la transmisión.
Para ilustrar el funcionamiento del modelo, se considera un caso de dos capas del mismomaterial, unidas en contrafase (electrodo negativo común). Los resultados del modelodemuestran que:
• Se consigue control en un margen ancho de frecuencias.• Existen polos a frecuencias correspondientes a múltiplos de media longitud de onda.• Existen mínimos a frecuencias correspondientes a múltiplos impares de un cuarto de
longitud de onda.• Los voltajes necesarios son independientes de la impedancia del medio transmitido
(impedancia backing). Esto demuestra que este método, pensado originalmente para eldiseño de recubrimientos activos en agua, puede usarse también en aire.
• El sistema CAAE necesario para implementar esta estrategia debería tener dos canales.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
8
Autores: J. Pan, C.H. Hansen, and D.A. Bies
Título: Active control of noise transmission through a panel into a cavity: Analytical study
Revista: J.A.S.A. Año: 1990 Vol(Num): 87(5) Páginas:2098-2108
Problema: Mecanismos de control Aplicación: Control del ruido transmitidoa través de un panel
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro:
Resumen: En este trabajo se exponen los fundamentos teóricos del control del ruidotransmitido a través de un panel a una cavidad, usando actuadores puntuales sobre el panel. Setrata del primero de una serie de tres artículos de los autores sobre este tema. Los autoresexponen el modelo, discuten sus predicciones, e identifican los dos mecanismos fundamentalesde control.
El modelo consiste en el acoplamiento del comportamiento modal del panel con elcomportamiento modal de la cavidad. Se usa la ecuación de ondas acústica para describir elcampo acústico en la cavidad en términos de una serie de modos amortiguados. Se usa laecuación de ondas de un panel fino isotrópico para describir la vibración del panel en términosde sus modos normales amortiguados. El acoplamiento entre ambos sistemas se hace a travésde la continuidad de la velocidad de partícula en la superficie interna del panel.
Se calcula el campo de presión en la cavidad en términos de los modos en el panel y en la
cavidad. La función de coste, pp * , es proporcional a la energía potencial acústica en la
cavidad. Para una posición fija de los actuadores, esta función de coste es una forma cuadráticadefinida positiva que tiene un sólo mínimo. Este mínimo puede ser encontrado analíticamente.Sin embargo, los autores usan el método de Newton para encontrarlo.
Se identifican dos mecanismos de control. Si el campo acústico está dominado por un modo delpanel, el mecanismo de control consiste en suprimir la vibración correspondiente a ese modo.Si, por el contrario, el campo acústico está dominado por un modo de la cavidad, el controlóptimo consiste en ajustar las amplitudes y las fases del campo de velocidad en el panel, de talmodo que la parte real de la potencia acústica radiada por el panel en la cavidad sea mínima. Eneste último caso, puede ocurrir un aumento del flujo de intensidad reactiva local y de los nivelesde vibración del panel.
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
9
Autores: C.A. Rogers
Título: Active vibration and structural acoustic control of shape memory alloy hybridcomposites: Experimental results
Revista: J.A.S.A. Año: 1990 Vol(Num): 88(6) Páginas:2803-2811
Problema: Uso de las aleaciones conmemoria de forma (SMA) para CAAE
Aplicación: CAAE 1D (barra)
Teórico/Experimental: Ambos Sistema comercial:
Extrapolación: Filtro:
Resumen: Una aleación con memoria de forma (SMA) es un material que tiende a recuperarsu forma original cuando se calienta. Si estiramos el material, por ejemplo, y lo calentamos,cuando sobrepasa una cierta temperatura, tenderá a recuperar su estado original,proporcionando una tensión en la dirección longitudinal. Uno de los materiales SMA conpropiedades más espectaculares es una aleación de Niquel y Titanio denominada Nitinol. LosSMA se pueden usar como actuadores para el control activo de las vibraciones y del ruidoestructural, y como sensores. Además, se pueden embeber fibras o películas de estos materialesen estructuras para formar compuestos híbridos con SMA. Para construir compuestos híbridoscon SMA para el CAAE se puede usar la técnica denominada sintonización activa de la energíade deformación (ASET). Esta técnica consiste en sintonizar o modificar la respuesta modal dela estructura (barras o placas) simplemente calentando las fibras de SMA embebidas o pegadasa la estructura, de tal modo que cambie la rigidez de toda la estructura. El Nitinol es capaz decambiar el módulo de Young de la estructura por un factor 4 y la yield strength por un factor10. Estos cambios del material ocurren simplemente por un cambio de fase (cuando se superauna cierta temperatura en el SMA) y no da lugar a ninguna fuerza apreciable. Es decir, cuandose activan los fibras de SMA, se coloca la estructura en un estado de deformación residual, sinoriginar deflexiones en la misma. La energía de deformación almacenada resultante cambia elbalance de energía de la estructura y modifica su respuesta modal.
Se presentan resultados experimentales del CAAE de una barra grafito-epoxy de 81.92 cm delarga, 2.03 cm de ancha, y de 0.1 mm de espesor, con un 15 % en volumen de Nitinol en formade fibras. La barra se excitaba con un shaker y se aplicaba un método de búsqueda constreñidacomo sistema de control. Se presentan resultados a frecuencias de 35 Hz (primer modo) con20-25 dB de atenuación, y de 145 Hz (cuarto modo) con 25-30 dB de atenuación.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
10
Autores: R.L. Clark, C.R. Fuller, and A. Wicks
Título: Characterization of multiple piezoelectric actuators for structural excitation
Revista: J.A.S.A. Año: 1991 Vol(Num): 90(1) Páginas:346-357
Problema: Distribución de la excitaciónproporcionada por cerámicas piezoeléctricas
Aplicación: CAAE 1D (barras)
Teórico/Experimental: Ambos Sistema comercial:
Extrapolación: Filtro:
Resumen: Se presenta un modelo de la excitación de una barra por medio de un par deactuadores piezocerámicos, y se comparan las predicciones del modelo con resultadosexperimentales. El modelo teórico incluye la barra y los actuadores. Se asume que ambos estánpegados perfectamente por una capa de pegamento de espesor cero. El actuador incluye doscerámicas, una por encima y otra por debajo de la barra, excitadas en contrafase. Por tanto, sólose incluyen ondas flexionales. Se desprecian la masa y la rigidez del actuador. Finalmente, seobtiene una relación lineal entre el momento inducido por el actuador y la deformación delpiezoeléctrico (o lo que es lo mismo, el voltaje exterior aplicado). El modelo para la barraproporciona el desplazamiento vertical en términos de una suma de modos normales (modelo1D). No incluye el incremento de la rigidez efectiva de la barra debido al desplazamiento en ladirección tranversal.
Se construye una barra de acero de (380 mm x 40 mm x 2 mm) simplemente soportada en losbordes. A 76 mm y 268 mm desde el borde izquierdo se pegan dos actuadores de (38.1 mm x15.8 mm x 0.2 mm) de material G1195. Antes de pegar las cerámicas se unta la barra con unacapa de cola aislante, para evitar que se produzca un corto entre los terminales eléctricos. Sedispone un acelerómetro B&K 4374, de 0.65 g de peso, cada 20 mm a lo largo de la placa (18posiciones de medida). Experimentalmente se determina el margen de linealidad de las medidasen (100 , 2000) Hz y (30 , 90) V. Se comparan los valores propios (frecuencias modales) yvectores propios (formas modales) teóricos con los experimentales para los seis primerosmodos. Las frecuencias de los primeros cuatro están bastante próximos. Los dos últimos semiden con un error relativo del 3 %. Las amplitudes modales se obtienen por descomposiciónespacial a partir de medidas de las FRF. Los vectores propios de los primeros cinco modoscoinciden bastante bien con los teóricos, a diferencia del sexto. Las amplitudes modales semiden con errores de hasta el 25 %. Se presenta evidencia experimental de la importancia deexcitar los dos actuadores en fase o en contrafase. Dependiendo de la diferencia de fase entreambos actuadores se pueden exitar modos dominantes o modos residuales de la estructura.
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
11
Autores: S.E. Burke and J.E. Hubbard, Jr
Título: Distributed transducer vibration control of thin plates
Revista: JASA Año: 1991 Vol(Num): 90(2) Pág: 937-944
Problema: Diseño de transductores Aplicación: Control de vibraciones
Teórico/Experimental: Teórico Sistema comercial: No
Extrapolación: No Filtro: No
Resumen : Se desarrolla en este trabajo un método para el diseño y aplicación de transductoresdistribuidos para medida y control de la vibración de placas delgadas sujetas a condiciones decontorno generales. El método diseñado para el control está basado en la teoría de Lyapounovque determina la estabilidad de un sistema a partir de su energía. Se utiliza la representaciónintegral de la energía para desarrollar distribuciones espaciales de transductores ycompensadores temporales para medir y atenuar simultáneamente los modos de vibración de lasplacas tan bien como los de los modos seleccionados.
Se desarrolla un modelo para actuadores distribuidos en una placa, considerando una lámina dePVF biaxial, una capa piezoeléctrica que actúa como transductor adherido a una de las caras dela placa. Esta capa piezoeléctrica responde al campo eléctrico al que se ve sometido con unadeformación longitudinal en las dos dimensiones del plano. La energía de este sistema puedeexpresarse de forma integral, en la cual se destacan un término de deformación y otro deenergía cinética. Cuando la derivada temporal de esta expresión es negativa, el sistema esestable siguiendo el criterio de Lyapunov, disminuye la potencia. Esta metodología puedeextenderse a otras geometrías (barras,...) y otros transductores (sensores distribuidos),debiéndose imponer en cada caso las restricciones de contorno necesarias.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
12
Autores: L.D. Lafleur, F.D. Shields, and J.E. Hendrix
Título: Acustically active surfaces using piezorubber
Revista: J.A.S.A. Año: 1991 Vol(Num): 90(3) Páginas:1230-1237
Problema: Superficies activas tipopiezorubber
Aplicación: Control de larelexión/transmisión de pulsos tipo burst(sonar)
Teórico/Experimental: Ambos Sistema comercial:
Extrapolación: Filtro:
Resumen: Los materiales compuestos se construyen dispersando polvo de un materialpiezoeléctrico en un polímero sólido. Estos materiales compuestos tienen una densidad muchomenor que la de las cerámicas clásicas, y una impedancia más próxima a la del agua. Cuando elmaterial base de estos compuestos es goma, se denominan piezogomas. Tienen la ventaja deque son flexibles y se pueden ajustar a superficies no planas. Es decir, son ideales comorecubrimientos activos. Se puede ajustar el voltaje de excitación de estos materiales paraproducir reflexión cero (materiales anecoicos), transmisión cero, o ambos. En este trabajo: (1)se modeliza un sistema con una capa activa y dos capas activas. Para resolver el sistemaresultante es necesario medir las constantes piezoeléctricas como una función de la frecuenciade la piezogoma usada. (2) Se usa una capa para controlar la reflexión o la transmisión. (3) Seusan dos capas para controlar la reflexión y la transmisión simultáneamente.
Los experimentos se hacen en un tubo de ondas de 4.385 m de largo, 6.31 cm de diámetroexterior y 8.91 cm de diámetro exterior. En ambos extremos se ponen transductres construidostambién a base de la piezogoma. El primer modo transversal en el conducto es de 13 kHz. Eltubo está relleno con aceite de castor, el cual tiene una impedancia parecida a la del agua, peroes menos corrosivo. En el centro del tubo se coloca el sistema activo, compuesto de uno o dosdiscos de piezogoma. El procedimiento de medida consiste en excitar un transductor de uno delos extremos con tonos burst, aplicar una ganancia y un desfase apropiados al disco central através de un DSP, y medir la reflexión y la transmisión en los transductores de los extremos. Sepresentan resultados experimentales en un margen de frecuencias de hasta 100 kHz. Para elcaso de la doble capa (control simultáneo de la reflexión/transmisión los resultados sonexperimentales). Aunque no se cita explícitamente, este trabajo tiene aplicación directa en sonaractivo.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
13
Autores: J. Pan and C.H. Hansen
Título: Active control of noise transmission through a panel into a cavity. II: Experimentalstudy
Revista: J.A.S.A. Año: 1991 Vol(Num): 90(3) Páginas:1488-1492
Problema: Ruido transmitido Aplicación: Control del ruido transmitidoa través de un panel
Teórico/Experimental: Experimental Sistema comercial:
Extrapolación: Cambio de fase Filtro: Control manual
Resumen: Este es el segundo artículo de una serie de tres de los mismos autores. En el primerose presentaba un modelo analítico para estudiar el control del ruido transmitido a través de unpanel a una cavidad usando actuadores puntuales. En este trabajo se presentan resultadosexperimentales que validan el modelo.
El experimento consiste en el estudio del campo acústico en la cavidad y del campo deaceleración en el panel en condiciones originales y bajo control. La cavidad tiene unasdimensiones de (1.15x0.868x1) m3 y está construida con paneles de hormigón de 20 cm deespesor. El panel, simplemente soportado en los bordes superiores de la cavidad, es de aluminiode 6 mm de espesor. El campo acústico se genera en el exterior con un arco de altavoces tipobocina a una distancia de 63 cm desde el centro del panel. Se usa un actuador electromagnéticoen el centro del panel, y un micrófono de error en una de las esquinas inferiores de la cavidad.La misma señal armónica excita a los altavoces y al actuador, en el primer caso a través de loscorrespondientes amplificadores, y en el segundo a través de un amplificador y un desfasador.Se trata por tanto de un control manual. Se usa un array de 10 acelerómetros a lo largo de unalínea paralela a uno de los ejes para medir la aceleración del panel. Este array lineal se mueveen la dirección del otro eje. Se mide en 130 puntos en total. Se usa un array lineal de sietemicrófonos paralelo a uno de los ejes, el cual se mueve en la dirección de los otros dos ejes.Con ambos arrays, se mide el campo acústico en la cavidad y el campo de aceleración en elpanel, en las condiciones originales y bajo control. Se analizan dos frecuencias: 170.5 Hz, unmodo de cavidad, y 181 Hz, un modo del panel.
Los resultados experimentales confirman las predicciones del primer trabajo acerca de losmecanismos de control: supresión de la vibración del panel, para el caso de 181 Hz, y reajustemodal del panel, para el caso de 170.5 Hz.
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
14
Autores: J. Pan and C.H. Hansen
Título: Active control of noise transmission through a panel into a cavity. III: Effect of theactuator location
Revista: J.A.S.A. Año: 1991 Vol(Num): 90(3) Páginas:1493-1501
Problema: Situación óptima de losactuadores
Aplicación: Control del ruido transmitidoa través de un panel
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro:
Resumen: En el primer artículo de los mismos autores se exponía el modelo acopladoacústico-estructural. En el segundo artículo se validaba experimentalmente el modelo. Puesbien, en este tercer artículo los autores usan el mismo modelo acústico-estructural para analizarla influencia en el control de la posición del actuador.
Recordemos el modelo. Se resuelve la ecuación de ondas en la cavidad por el método de Green.Se encuentra la solución para la presión acústica en términos de los modos normales de lacavidad rígida. A continuación se resuelve la ecuación de ondas para la vibración vertical de unpanel simplemente soportado por el método de Green. Se encuentra la solución para lavelocidad de vibración en términos de los modos normales del panel. El acoplamiento acústico-estructural enrtre la cavidad y el panel se hace a través de la condición de contorno que implicala continuidad de la velocidad vertical en la cara interna del panel. De este modo se puedecalcular la vibración vertical del panel y la presión acústica en el interior. A partir de aquí se
construye una función de coste pp * . Esta función de coste resulta ser una forma cuadrática
semidefinida positiva en la fuerza de control. Se puede calcular su mínimo.
Aunque la fuerza de control que minimiza la función de coste depende de la posición delactuador, esta dependencia no es sencilla. Por tanto, la optimización de la fuerza de control enfunción de la posición del actuador no es un problema trivial. Además, es necesario tener encuenta otras variables, tales como la amplitud de la fuerza de control (esfuerzo de control) laamplitud de vibración promedio del panel, y el flujo de potencia reactiva. Los autores analizanestas cuatro variables como función de la posción del actuador a dos frecuencias: 170.5 Hz y181 Hz. Los resultados analíticos demuestran que pueden existir varias posiciones candidataspara situar el actuador atendiendo a estas cuatro variables. Los autores alertan sobre lanecesidad de encontrar un método de optimización apropiado, sobre todo cuando existan variosactuadores.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
15
Autores: B-T Wang, C.R Fuller and E.K. Dimitriadis
Título: Active control of noise transmission through rectangular plates using multiplepiezoelectric or point force actuators
Revista: JASA Año: 1991 Vol(Num): 90(5) Pág: 2820-2830
Problema: Controlar la transmisión acústicaen una placa simplemente soportada
Aplicación: Control de vibraciones
Teórico/Experimental: Ambos Sistema comercial: No
Extrapolación: No Filtro: No
Resumen : Se presenta un estudio el uso de actuadores piezoeléctricos o fuerzas puntuales(shakers) como fuerzas secundarias para reducir la transmisión acústica en un panelsimplemente soportado. Se analiza la respuesta en frecuencia y la Pérdida por Transmisión (TL)del sistema cuando es excitado con una fuente armónica puntual (shaker) a distintasfrecuencias, para distinto número y posiciones de las fuentes secundarias. Minimizando lafunción de coste definida, relacionada con la potencia acústica radiada, se determinan losvoltajes de entrada que hay que aplicar tanto a los actuadores piezoeléctricos como los shakersy se consigue aumentar la TL del panel.
La radiación sonora producida por la vibración de una placa está relacionada con la distribuciónde aceleración de ésta. Aplicando el principio de superposición a un sistema con N fuentesprimarias y M secundarias puede deducirse la expresión de la presión sonora radiada, a partir dela solución de la integral de Rayleigh. La función de coste es una expresión cuadrática, definidacomo la integral del cuadrado del módulo de esta presión alrededor de una semiesfera con radioconocido. Minimizar esta función de coste implica determinar las fuentes de control.
Las dos integrales, una para el uso de piezoeléctricos y otra para el de shakers, se evalúananalíticamente con una primera aproximación de Simpson. Los resultados obtenidosdemuestran que en ambos casos se reduce considerablemente la transmisión sonora a través delpanel, siempre y cuando se utilice el número adecuado de actuadores y en las posicionesóptimas. Como norma general a medida que aumenta el número de fuentes de control aumentala atenuación sonora, al igual que ocurre en control acústico. Una conclusión sorprendente esque los shaker ofrecen mejores resultados que los piezoeléctricos a pesar de que éstos últimostienden a remplazar a los primeros por su bajo precio y, tamaño y peso que les hace muymanejables.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
16
Autores: C.R. Fuller, C.H. Hansen, and S.D. Snyder
Título: Active control of sound radiation from a vibrating rectangular panel by soundsources and vibrational inputs: an experimental comparison
Revista: JSV Año: 1991 Vol(Num): 145(2) Páginas:195-215
Problema: Comparación CAR vs CAAEpara el control del ruido estructural
Aplicación: CAAE
Teórico/Experimental: Experimental Sistema comercial: No
Extrapolación: Filtro: Ajuste manual
Resumen: Se hace una comparación experimental entre el control CAR y CAAE del ruidoradiado por un panel fino. En ambos casos, el panel es excitado a una frecuencia pura, quepuede ser una frecuencia propia del panel o una frecuencia intermedia entre modos (vibraciónforzada). En CAR, se trata de cancelar el ruido radiado usando altavoces próximos al panelvibrante. En CAAE, se usan 1-3 actuadores (vibradores) sobre el propio panel. Este artículopone más énfasis en la parte acústica que en la parte electrónica. De hecho, la cancelación sehace manualmente, ajustando la amplitud y las fases de las fuentes de control para máximacancelación en los sensores de error (un micrófono formando un determinado ángulo con el ejeacústico del panel). Se obtienen conclusiones muy interesantes:
• En CAR, el mecanismo de cancelación consiste en descargar la fuente (reducir laimpedancia de radiación).
• En CAAE, parece haber dos mecanismos de cancelación: supresión modal (incremento de laimpedancia de entrada vista por el panel), que predomina a las frecuencias propias del panel,y reestructuración modal (modificación de las fases relativas de los modos), que predominaen vibración forzada.
• En cualquier caso, la cancelación CAAE siempre es superior a la cancelación CAR.
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
17
Autores: C.H. Hansen, and S.D. Snyder
Título: Mechanisms of active noise control by vibrating sources
Revista: JSV Año: 1991 Vol(Num): 147(3) Páginas:519-525
Problema: Comparación CAR vs CAAEpara el control del ruido estructural
Aplicación: CAAE
Teórico/Experimental: Experimental Sistema comercial: No
Extrapolación: Filtro: Ajuste manual
Resumen: Otro trabajo más sobre comparación de control CAR y CAAE cuando el ruido esde origen estructural. El mecanismo de cancelación CAR es la reducción de la impedancia deradiación “vista” por la fuente de ruido (“descarga” acústica de la fuente). En algunos casos,donde no se actúa sobre la impedancia de radiación, se pueden conseguir zonas de cancelaciónactiva local a costa de zonas de refuerzo.
En control CAAE se encuentran dos mecanismos de cancelación:
• Control modal, o reducción de las amplitudes modales.• Reestructuración modal, o alteración de las amplitudes y fases modales.
La importancia relativa de un mecanismo u otro depende de varios parámetros del sistemageométrico y acústico/estructural.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
18
Autores: C.R. Fuller and R.A. Burdisso
Título: A wavenumber domain approach to the active control of structure-borbe sound
Revista: JSV Año: 1991 Vol(Num): 148(2) Páginas:355-360
Problema: CAAE en el dominio del númerode onda
Aplicación: CAAE 1D a determinadosángulos
Teórico/Experimental: Ambos Sistema comercial: No
Extrapolación: Filtro: Ajuste manual
Resumen: Usando la aproximación de fase estacionaria para evaluar el sonido radiado alcampo lejano por una estructura, se puede demostrar que la radiación en un determinado ánguloes debido a una determinada componente espectral de la vibración estructural en el dominiotransformado de Fourier. En realidad este es un hecho bien conocido en teoría de ondas y usadoprofusamente en exploración sísmica (filtrado fan). De hecho, es elemental que la inclinaciónde un campo de ondas en el dominio (x,t) es perpendicular a la inclinación del campo de ondasen el dominio (kx,ω). Por ejemplo, una onda plana de frecuencia ω0 inclinada un ángulo θ en eldominio (x,t) da lugar a un punto en (k sin θ, ω0) en el dominio transformado. En el contextodel CAAE, una vibración estructural con un determinado número de onda kx0 dará lugar a unaradiación sonora en la dirección del ángulo θ0. Por consiguiente, un sistema CAAE que cancelela radiación estructural correspondiente a la componente espectral kx0, cancelará la radiciónsonora en la dirección del ángulo θ0, sin necesidad de situar un micrófono en esa dirección en elcampo lejano. El objetivo fundamental de este trabajo es demostrar la viabilidad de estaestrategia. Por desgracia, no explica como diseñar un sensor que sea capaz de medirdeterminadas componentes espectrales de la respuesta estructural del sistema bajo estudio (eneste caso, una barra delgada en soporte simple, en un baffle infinito).
Se presentan resultados de una simulación numérica sobre el CAAE de una barra de acero de38 cm en soporte simple, a una frecuencia de resonancia (tercer modo) y θ=45º, y a unafrecuencia forzada (entre los modos 3º y 4º) y θ=-20º. En el primer caso, el control a 45ºimplica reducción en todo el semiespacio. En el segundo, la reducción a –20º va acompañadade refuerzo importante a otros ángulos.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
19
Autores: C.R. Fuller, C.H. Hansen, and S.D. Snyder
Título: Experiments on active control of sound radiation from a panel using a piezoceramicactuator
Revista: JSV Año: 1991 Vol(Num): 150(2) Páginas:179-190
Problema: CAAE de una placa en soportesimple usando actuadores PZT
Aplicación: CAAE 2D a frecuenciasmodales
Teórico/Experimental: Experimental Sistema comercial: No
Extrapolación: Filtro: Ajuste manual
Resumen: Se trata de un trabajo muy similar al publicado por los mismos autores en elvolumen 145 d JSV. Allí se comparaban las eficiencias del CAR y del CAAE para la reduccióndel ruido radiado por una placa delgada en soporte simple, usando shakers como fuenteprimaria y secundaria. En este trabajo, se centran en el CAAE del ruido radiado por la mismaplaca, pero usando un excitador electromagnético sin contacto como fuente primaria, y unaactuador piezocerámico de PZT como fuente secundaria. El trabajo es completamenteexperimental. El control es manual (se ajustan la amplitud y la fase del actaudor para máximareducción de la presión acústica en un micrófono del campo lejano). El actuador es un PZT (G-1195) de (6.35 cm x 3.81 cm x 1.9 mm). Debido a la alta impedancia de la cerámica, la señaleléctrica de excitación ha de pasar por un transformador de voltaje 20:1, después de amplificaday desplazada en fase. Para evitar la saturación, chequean la entrada al transformador con unosciloscopio. Para el funcionamiento del actuador, es muy importante que esté bien pegada a laplaca, y que la capa de pegamento sea lo más delgada posible. Primero pegan una láminadelgada a la cara interior de la cerámica, con epoxy conductor, a modo de electrodo. Despuéssueldan un hilo fino a la cara exterior de la cerámica, el otro electrodo. El conjunto se pegaentonces a la placa con epoxy no conductor. Se comprueba la linealidad del actuador hasta unvoltaje de entrada pico-a-pico de 450 V. Con 40 V pico-a-pico, se miden niveles de presiónsonora a 1.8 m de la placa de unos 79 dB. El sensor de error es un micrófono de 1” en el campolejano de la placa (a 1.8 m). La placa se encastra en un baffle de madera de (2.4 m x 2.4 m x 19mm).
Los experimentos se realizan a las frecuencias del modo (1,1), 84 Hz, y del modo (3,1), 350 Hz.Se consigue cancelación global de 45 y 43 dB, respectivamente.
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
20
Autores: D.R. Browning and D.R. Morgan
Título: A pseudo-cascade FXLMS approach to active vibration cancellation
Revista: Noise-Con91 Año: 1991 Vol(Num): Pág: 353-360
Problema: Diseño de algoritmos adaptativos Aplicación: Control de vibraciones
Teórico/Experimental: Ambos Sistema comercial: No
Extrapolación: No Filtro: PCFXLMS
Resumen : El algoritmo adaptativo LMS es muy utilizado en sistemas CAR para atenuar unaseñal correlacionada con la señal de referencia. Cuando la señal de control no puede aplicarsedirectamente a la señal de referencia escogida, se emplea alternativamente el algoritmoFXLMS. Al utilizar señales armónicas, el algoritmo FXLMS se convierte en un "notch filter"que elimina las componentes espectrales de una estrecha banda alrededor de la frecuencia dereferencia. Por ello, este algoritmo es muy utilizado en control de ruido y vibraciones quepresentan esta característica espectral.
En este trabajo se presenta una extensión de este FXLMS "notch filter" que permite aumentar elancho de banda de cancelación. El nuevo algoritmo desarrollado es un algoritmo FXLMS enpseudocascada, y adopta las siglas PCFXLMS. En definitiva, esta nueva técnica inyecta unacascada de secciones FXLMS en la vía de cancelación, consiguiendo que se combine laatenuación de los notch FXLMS próximos, y así aumentar la banda de frecuencia de estacancelación.
Experimentalmente se estudia la utilización del algoritmo PCFXLMS como un controlador devibraciones. La señal de banda ancha que genera un motor produce vibraciones en la superficieque lo sostiene. Varios sensores y actuadores se posicionan óptimamente en la placa paradetectar y atenuar los modos de vibración (primero y tercero) fuertemente excitados,correspondientes a las frecuencias 14.3 y 25.4 Hz. El algoritmo descrito se implementa en elsistema de control y se observan resultados bastante favorables. Es un algoritmo muy útilcuando se utiliza para controlar directamente la vibración de la estructura.
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
21
Autores: C.F. Ross
Título: The practical use of active cancellation for machinery isolation
Revista: Proc. UDT Año: 1992 Vol(Num): Páginas:539-544
Problema: Control activo de las vibraciones Aplicación: Ruido de barcos
Teórico/Experimental: tutorial Sistema comercial:
Extrapolación: No Filtro:
Resumen: Se hace una revisión de los métodos que existen para el control de las vibracionesde la maquinaria, en conexión con el ruido radiado por barcos. Los calzos antivibratorios hande satisfacer requisitos contradictorios. Por una parte, para aislar las fuerzas dinámicas, causade las vibraciones, han de ser compliantes. Por otra parte, para un buen funcionamiento estáticose han de permitir pocas tolerancias de la máquina, por lo que han de ser rígidos. El controlactivo permite conciliar ambos requisitos. Las fuerzas dinámicas pueden contrarestarse porcontrol activo, permitiendo que el soporte sea lo suficientemente rígido. Se discuten cuatrotipos de soportes activos:
• Vibrador inercial en la propia máquina.• Vibrador inercial bajo el calzo.• Actuador en paralelo con el calzo.• Actuador en serie con el calzo.
Se discuten las ventajas e inconvenientes de cada uno de estos montajes, tanto desde el puntode vista mecánico (fuerzas, desplazamientos y masas inerciales requeridas), como desde elpunto de vista de la estrategia de control (complejidad y robustez). En general, todos losmontajes requieren un número mínimo de seis fuentes secundarias (tres grados de libertad detraslación y tres de rotación). Una estrategia de control pasivo-activo puede reducir el númerode fuentes requeridas. Desde el punto de vista del control, el autor concluye que los montajescon actuador son superiores a los montajes con vibrador. Se discuten algunos tipos de actuador(hidráulico, neumático, piezoeléctrico, magnetoestrictivo, electromagnético, SMA). Se discutenlas ventajas, inconvenientes y aplicaciones de cada uno de ellos.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
22
Autores: R.L. Clark and C.R. Fuller
Título: Experiments on active control of structurally radiated sound using multiplepiezoceramic elements
Revista: J.A.S.A. Año: 1992 Vol(Num): 91(6) Páginas:3313-3320
Problema: CAAE multicanal Aplicación: CAAE 2D (placas)
Teórico/Experimental: Experimental Sistema comercial: TI TMS320C25
Extrapolación: Filtro: Anticipativo
Resumen: Este trabajo es la continuación de uno previo publicado por Fuller et al en JSV(1991). Allí se trataba de analizar los mecanismos de control en el CAAE de una placa usandoun simple control manual. Aquí se hace prácticamente lo mismo, pero usando un controladormulticanal anticipativo implementado en un DSP TMS320 C25 de TI. La placa está construidade acero de 1.96 mm de espesor y (380 mm x 300 mm) en un bafle de madera de 19 mm y (4.2m x 2.2 m). El bafle reduce el efecto dipolo que se crearía si ambos lados de la placa radiaranlibremente. La placa se excita armónicamente con un shaker en la posición (240 mm, 130 mm)con respecto a su borde inferior izquierdo. Se usan tres actuadores piezoeléctricos PZT G-1195,de (38.1 x 21 x 0.19 ) mm, distribuidos a lo largo de la placa según dos configuraciones. En laprimera los actuadores están acoplados a los modos impares. En la segunda, los actuadoresestán en los antinodos del modo (3,1). En ambos casos, los actuadores consisten en doscerámicas piezoeléctricas , a un lado y a otro de la placa, excitados en contrafase, de modo quese generan esencialmente ondas flexionales. El voltaje inducido era menor que 180 V rms. Encada caso se medía la respuesta estructural de la placa con 9 miniacelerómetros, y la respuestapolar acústica en un radio de 1.6 m. La respuesta estructural era convertida a amplitudesmodales mediante descomposición modal. Los micrófonos a -45º, 0º, y 45º se usaban comomicrófonos de error. Se analizó el efecto de la excitación a frecuencias de resonancia o fuera dela resonancia, y el efecto del número y posición de actuadores. Se concluyó:
• Para excitación en resonancia, la respuesta está dominada por un modo, por lo que el númerode actuadores tenía poca influencia en los resultados del control. El mecanismo de controlera fundamentalmente la supresión modal.
• Para excitación fuera de la resonancia, se obtiene más cancelación cuanto mayor sea elnúmero de actuadores. La posición de los actuadores resultó crítica. El mecanismo decontrol era la reestructuración modal.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
23
Autores: R.L. Clark and C.R. Fuller
Título: Modal sensing of efficient acoustic radiators with polyvinylidene fluoride distributedsensors in active structural acoustic control approaches
Revista: J.A.S.A. Año: 1992 Vol(Num): 91(6) Páginas:3321-3329
Problema: Uso de PVDF como sensorespara CAAE multicanal
Aplicación: CAAE 2D (placas)
Teórico/Experimental: Experimental Sistema comercial: TI TMS320C25
Extrapolación: Filtro: Anticipativo
Resumen: Este trabajo es complementario con el anterior. Allí se hacia un CAAE multicanalusando cerámicas piezoeléctricas como actuadores y micrófonos como sensores de error.Cuando interese que los sensores estén integrados en la propia estructura se puede usar PVDF.En este trabajo, los autores comparan los resultados del CAAE en la misma placa usandosensores tipo PVDF y micrófonos. Además se introduce un nuevo método de análisis basado enla transformación coordenada espacial→ número de onda. El espectro en la frecuencia espacialpermite distinguir entre la zona radiante o supersónica (kestructural < kacústico) y la zona no radianteo subsónica (kestructural > kacústico). Por tanto, comparando los espectros en la frecuencia espacialantes y después del control se puede identificar fácilmente el mecanismo de control porsupresión modal o por reestructuración modal.
En una placa rectangular, los modos que radian más eficientemente son los correspondientes alos números impar-impar. Teóricamente, se demuestra que un par de tiras perpendiculares entresi, paralelas a cada uno de los lados de la placa, son sensores eficientes de los modos impar-impar (aunque también se miden los modos impar-par). Hay detalles experimentalesinteresantes acerca de como pegar los sensores PVDF sobre la placa. El material PVDF es unode 28 µm fabricado por Kynar Piezo Film, con un acoplamiento piezoeléctrico dos veces mayoren una dirección que en la otra. Esto es importante a la hora de cortarlo.
El resultado más importante es que para todos los casos analizados (excitación en resonancia yfuera de la resonancia) siempre se consigue una cancelación mayor usando micrófonos queusando PVDF. Para mejorar los resultados con el PVDF, los autores sugieren dar una formamás apropiada a los sensores para seleccionar mejor los modos que se quieren medir.
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
24
Autores: J. Pan, S.D. Snyder, C.H. Hansen, and C.R. Fuller
Título: Active control of far-field sound radiated by a rectangular panel - A general analysis
Revista: J.A.S.A. Año: 1992 Vol(Num): 91(4),Pt. 1
Páginas: 2056-2066
Problema: Ruido radiado por un panelrectangular en un bafle
Aplicación: CAAE 2D (panel)
Teórico/Experimental: Ambos Sistema comercial:
Extrapolación: Filtro: Control manual
Resumen: Se presenta un análisis teórico, junto con una validación experimental, del CAAEdel ruido radiado por un panel rectangular. Primero se resuelve la ecuación de ondas para lavibración vertical del panel por el método de los modos normales. Se considera un panelsimplemente soportado (no hay desplazamiento en el borde, pero si rotación). Conocida lavelocidad de vibración vertical del panel, la integral de Rayleigh permite calcular la presiónacústica radiada. Para la geometría considerada, la integral de Rayleigh tiene solución analítica.La función de coste elegida es la potencia sonora total de salida, proporcional al cuadrado de lapresión sonora radiada. La función de coste incluye las correspondientes fuentes de control. Seconsideran dos casos: control acústico (CAR) donde las fuentes de control son fuentes acústicas(altavoces) y control estructural (CAAE) donde las fuentes de control son actuadores puntuales.El trabajo incluye el modelo analítico para ambos casos, incluida la solución de control óptimo.
En la parte experimental se considera una placa de acero de 2 mm de espesor y (0.38x0.3) m2
en un bafle de madera de 19 mm de espesor y (4.8x2.4) m2. Se usa un excitadorelectromagnético que no requiere contacto con la placa, en el centro de la misma a 3 mm, comofuente primaria. El actuador es un vibrador electrodinámico unido a la placa a través de unavarilla de 25 cm. Se analizan dos posiciones para el actuador, a saber (0,-7 cm) y (-15 cm, 0)con respecto al centro de la placa. El altavoz es uno tipo bocina. La respuesta del panel esmedida usando 17 acelerómetros distribuidos en dos líneas. Para medir la radiación polar delpanel se usa un micrófono B&K de una pulgada en un brazo giratorio que recorre unsemicírculo de 1.8 m de radio con respecto al centro del panel. El control es manual, ajustandola fase del actuador para minimizar la presión sonora en un punto del diagrama polar.
Los resultados experimentales evidencian que el CAAE puede obtenerse por dos mecanismos:cancelación modal y reestructuración modal. En el caso del CAR, el mecanismo de control es laalteración de la impedancia vista por el panel y las fuentes de control.
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
25
Autores: K. Naghshineh, G.H. Koopmann, and A.D. Belegendu
Título: Material tailoring of structures to achieve a minimum radiation condition
Revista: J.A.S.A. Año:1992 Vol.(Num.): 92 (2,
Pt. 1)
Páginas: 841-855
Problema: Diseño de un material para que radie
débilmente
Aplicaciones: Control pasivo
Filtro: No Teórico/experimental: Teórico
Sistema comercial: No Otros:
Resumen: Este y el siguiente son dos artículos que salieron de la tesis de Naghshineh, en la PSU,
sobre la comparación de dos estrategias para reducir la radiación estructural. Aquí se trata la
estrategia del diseño del material para que radie débilmente.
El planteamiento es un problema inverso. En general, si conocemos el material del que está
constituida una superficie radiante, su forma geométrica, y sus condiciones de contorno, podemos
calcular su respuesta estructural (vibración) y su respuesta acústica (radiación sonora). Este sería el
problema directo. El planteamiento de los autores es el inverso. Es conocido que la potencia radiada
por un radiador puede ser descompuesta en términos de valores y vectores propios. Es conocido
también que existen modos que radian eficientemente (modos radiantes, modos supersónicos) y
modos que no radian al campo lejano (modos evanescentes, modos subsónicos). Pues bien, fijada la
forma modal de un modo evanescente o subsónico, se trataría de calcular las propiedades del
material para que este radiara según esa forma modal.
Para resolver este problema inverso se usa el método de los elementos finitos junto con la técnica de
programación lineal. Se aplica a una barra sujeta por un extremo y libre por el otro, y sujeta por los
dos extremos. Se calculan las distribuciones del módulo de Young y de la densidad de una barra de
acero, tal que radie a 300 Hz según la forma modal del 5º modo radiante. Es importante resaltar que
un radiador débil a una frecuencia modal, también lo es a las otras frecuencias.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
26
Autores: K. Naghshineh and G.H. Koopmann
Título: A deign method for achieving weak radiator structures using active vibration control
Revista: JASA Año: 1992 Vol(Num): 92(2) Pág: 856-870
Problema: CAAE Aplicación: Control de ruido radiado porestructuras vibrantes.
Teórico/Experimental: Ambos Sistema comercial: No
Extrapolación: No Filtro: No
Resumen : Se presenta un modelo matemático para minimizar la potencia total radiada porestructuras vibrantes, cuando son excitadas por fuentes armónicas y cuando actúan las fuentes decontrol (actuadores). Se recurre a la ya tradicional expresión cuadrática de la potencia, expresadaen función de las fuentes de control y excitación primaria (en forma de vector). Se analiza estaexpresión con y sin control, para determinar la influencia en la potencia total detectada cuandoestán presentes las fuentes secundarias. La potencia es minimizada para un determinado vectorcon las fuentes de control necesarias. Se analizan numéricamente los resultados del modelo paradeterminadas excitaciones y fuentes de control y posteriormente se verifica en un sistemaexperimental la buena correlación de los resultados obtenidos con los predichos en el modelo.
Se elige una barra como estructura vibrante. Su superficie se discretiza en N elementos de iguallongitud, y se consideran las fuentes de control, tanto como momentos (simulando actuadoresPZT) como fuerzas normales (shaker) aplicadas en cada nodo de la barra. La expresióncuadrática de la potencia se formula con elementos finitos. En primer lugar se utiliza un shakerexcitado con una sola frecuencia como fuente primaria y luego se aumenta el ancho de banda.Numéricamente se observa, tanto para shakers, actuadores PZT, y con las dos fuentes primarias,que se produce una notable reducción en la potencia radiada y en la eficiencia de radiación de larespuesta de la barra. Los resultados numéricos más importantes se pueden resumir en:
• La respuesta en amplitud de todo el sistema (con las fuentes secundarias) es mucho menorque sin la presencia de los actuadores en las frecuencias de resonancias.
• Estas amplitudes decrecen junto a los bordes de la barra, en o fuera de resonancia.• Hay un notable desplazamiento de la respuesta de la barra en relación con el número de onda
de la vibración, de la región supersónica a la subsónica.
El experimento diseñado con una barra de Al sujetada por los bordes y excitada con un shaker,demuestra la eficacia de este modelo, dado la fuerte correlación entre los resultados numéricos ylos empíricos.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
27
Autores: R.L. Clark , J. Pan, and C.H. Hansen
Título: An experimental study of the active control of multiple-wave types in an elasticbeam
Revista: J.A.S.A. Año: 1992 Vol(Num): 92(2),Pt. 1
Páginas:871-876
Problema: CAAE de ondas flexionales ylongitudinales en una barra
Aplicación: CAAE 1D (barras)
Teórico/Experimental: Experimental Sistema comercial: TI TMS320C25
Extrapolación: Filtro: Anticipativo
Resumen: En realidad, se trata más de un trabajo sobre Control Activo de las Vibraciones quesobre CAAE. En cualquier caso, puede tener su interés. El problema tratado es como medir(sensores) y controlar (actuadores) diferentes tipos de ondas en una barra. En cuanto a losactuadores, se usan pares de cerámicas piezoeléctricas pegadas a ambos lados de la barra,excitadas en contrafase, para generar ondas flexionales, y en fase, para generar ondaslongitudinales. Se usan actuadores independientes para cada tipo de onda: dos para las ondasflexionales, y uno para la longitudinal. En cuanto a los sensores, se usan pares deacelerómetros, en las direcciones transversal y longitudinal a la barra. Restando la respuesta delos acelerómetros en la dirección transversal, se mide la onda flexional. Sumando la respuestade los acelerómetros en la dirección longitudinal, se mide la onda longitudinal.
Se considera una barra de aluminio de sección (25 mm x 50 mm) y 4 m de longitud. En unextremo se fija el shaker, formando un cierto ángulo con la barra para excitar ambos tipos deondas. El otro extremo se introduce en una caja de arena para simular terminación anecoica. Elcontrolador es uno anticipativo de tres canales de entrada y tres de salida implementado en unDSP TMS320 C25 de TI. La frecuencia de excitación es de 970 Hz. La señal de referencia sesaca del generador.
Como resultados se muestran las componentes de la aceleración traslacional y rotacional de laaceleración, antes y después del control. Análogamente al caso del CAR en conductos, seconsigue reducir la vibración aguas abajo de la barra, a costa de un incremento aguas arriba.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
28
Autores: B.T. Wang and C.R. Fuller
Título: Near-field pressure, intensity, and wave-number distributions for active structuralacoustic control of plate radiation: Theoretical analysis
Revista: J.A.S.A. Año: 1992 Vol(Num): 92(3) Páginas:1489-1498
Problema: Distribuciones de intensidad ypresión en láminas controladas activamente
Aplicación: CAAE 2D (placas)
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro:
Resumen: Se presenta un estudio analítico de las distribuciones de presión en el campopróximo y de la intensidad en placas controladas activamente. El estudio se limita al modo (3,1)de la placa sometido a un CAAE monocanal, con un actuador de doble cerámica y unmicrófono en el campo lejano. Se observa que:
• En general, los módulos de la presión en el campo próximo y la intensidad son menores encondiciones de control.
• El campo controlado exhibe un comportamiento similar a un modo antisimétrio de un ordenmás alto que el (3,1). El campo monopolar que correspondería al modo (3,1) ha sidosustituido por otro con una región nodal próxima a la posición del micrófono de error.
• La aplicación del control parece reducir la radiación de los bordes de la placa, resultando enuna reducción global de la potencia acústica radiada. La posición del micrófono de error,aunque influye poco en la reducción global de la potencia radiada, tiene un efectosignificativo en las distribuciones de presión del campo próximo e intensidad.
Los resultados sugieren posibles estrategias para el diseño de nuevos sensores del campopróximo para la reducción del campo lejano. Para excitación en resonancia, se podría diseñarun sensor distribuido que suministre una señal de error proporcional al promedio de la presiónacústica sobre la superficie de la lámina. Otra estrategia podría ser usar una tira de sensordistribuido localizado en la región de presiones muy bajas de la distribución controlada. Estoproduciría una asimetría del campo radiado, la cual lleva asociada una reducción de la potenciaradiada. Se ha demostrado también que el espectro de frecuencias espaciales proporcionainformación interesante sobre los mecanismos del CAAE.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
29
Autores: R.L. Clark and C.R. Fuller
Título: Optimal placement of piezoelectric actuators and polyvinylidene fluoride errorsensors in activel structural acoustic control approaches
Revista: J.A.S.A. Año: 1992 Vol(Num): 92(3) Páginas:1521-1533
Problema: Optimización de actuadores ysensores en CAAE multicanal
Aplicación: CAAE 2D (placas)
Teórico/Experimental: Ambos Sistema comercial: TI TMS320C25
Extrapolación: Filtro: Anticipativo
Resumen: El objetivo de este trabajo es demostrar la viabilidad de usar una estructuraadaptativa, que incluye un actuador compuesto por dos cerámicas piezoeléctricas, una a cadalado de la placa, y un sensor distribuido PVDF, para conseguir cancelaciones similares a las quese pueden lograr con un sistema CAAE multicanal con tres actuadores y tres micrófonos en elcampo lejano. Para esto, es necesario optimizar la posición del actuador y la posición y formadel sensor. Para ello aplican la teoría de control óptimo lineal cuadrático (LQOCT). Se trata deun método del gradiente. Primero optimizan la posición del actuador, asumiendo sensoresacústicos en el campo lejano. A continuación, asumiendo que el actuador está optimizado,calculan la posición y forma óptimos del sensor PVDF. Primero definen una función de coste,que incluye modelos para el shaker primario, para el actuador y para el sensor. A continuaciónaplican rutinas de un paquete comercial, IMSL, para implementar el algoritmo de optimización,incluyendo constreñimientos físicos y del voltaje pico-a-pico del actuador (400 V). Comoresultado de este proceso, el actuador está cerca de la esqina superior derecha, y el sensor ocupauna franja de (252 x 22) mm en el borde inferior de la placa.
El experimento se hace en la misma placa usada por los autores en otros trabajos: placa deacero de (380 x 300 x 1.96) mm en un bafle de madera, en la cámara anecoica del VPI&SU,con un shaker como fuente primaria en la posición (240,130) mm. El controlador CAAE 3I/3Oconsta de tres actuadores cerámicos en los antinodos del modo (3,3) y tres micrófonos a 1.8 mdel centro de la placa, y a ángulos -45º, 0º y 45 º. Se excita la placa a 550 Hz, una frecuenciaque no corresponde a ninguna resonancia. Los resultados experimentales evidencian que esposible conseguir una atenuación polar de unos 20 dB, tanto con el sistema CAAE 3I/3O comocon el actuador adaptativo actuador/sensor optimizados. Para interpretar los resultados se usanel espectro espacial y la intensidad. El espectro espacial demuestra que en la ventanasupersónica a esta frecuencia existen varios modos con contribuciones significativas. Estojustifica la posición del actuador. El diagrama de intensidad demuestra que la radiación a estafrecuencia viene esencialmente de los bordes. Esto justifica la posición y forma del sensor.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
30
Autores: R.L. Clark and C.R. Fuller
Título: A model reference approach for implementing active structural acoustic control
Revista: J.A.S.A. Año: 1992 Vol(Num): 92(3) Páginas:1534-1544
Problema: Modelo de referencia para elCAAE multicanal
Aplicación: CAAE multicanal
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro: Anticipativo MIMO
Resumen: En este trabajo encontramos muchos conceptos ya publicados por los autores enartículos anteriores. Se trata de un modelo analítico para el CAAE del ruido radiado por unabarra (problema 1D). Así, encontramos un modelo para la radiación de la barra, incluyendo unafuerza primaria puntual, y varios actuadores piezoeléctricos (dobles), con las correspondientesecuaciones para cada uno de ellos. También, encontramos un modelo para los sensores, ya seanestos estructurales (acelerómetros) o acústicos (micrófonos). En este último caso, la relaciónacústico-estructural es la integral de Rayleigh. Se recuerda la relación que hay entre el espectroespacial y la parte radiante (región supersónica) y no radiante (región subsónica) de laestructura. Como estrategia de control, se repasan la teoría del Control Optimo LinealCuadrático (LQOCT) y el algoritmo FX-LMS.
La novedad de este trabajo se encuentra en la introducción del concepto del modelo dereferencia para la implementación del sistema de control. La idea que subyace en todo esto es laposibilidad de implementar CAAE sin necesidad de usar sensores acústicos. Cuando es posibleimplementar sensores acústicos, ya hemos visto en otros trabajos que se pueden conseguirgrandes atenuaciones. Sin embargo, desde un punto de vista tecnológico, parece que espreferible construir estructuras adaptativas, donde tanto los sensores como los actuadores seanestructurales. Como ya sabemos que reducir los modos estructurales no implica necesariamentereducir la respuesta acústica, es necesario encontrar la manera de reducir aquella parte de larespuesta estructural que es responsable de la respuesta acústica. Desde el punto de vista teóricola solución parece sencilla, pues basta reducir el espectro espacial en la región supersónica.Pues bien, el objetivo fundamental de este artículo es demostrar que esto se puede implementaren la práctica mediante una estrategia de control basada en un modelo de referencia. En laestrategia clásica, uno trata de llevar a cero las señales de error. En esta nueva estrategia, setrataría de llevar las señales de error a unos valores predeterminados, a un modelo de referencia.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
31
Autores: W.T. Baumann, F.S. Ho, and H.H. Robertshaw
Título: Active structural acoustic control of broadband disturbances
Revista: J.A.S.A. Año: 1992 Vol(Num): 92(4) Páginas:1998-2005
Problema: Control realimentado de ruido debanda ancha
Aplicación: CAAE 1D (barras)
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro: Realimentado espacio de estados
Resumen: En este trabajo encontramos una formulación realimentada para el CAAE del ruidode banda ancha radiado por una barra en el campo lejano. Se formula el problema decancelación acústica del ruido de banda ancha como un problema gausiano lineal cuadrático(LQG). Primero presentan un modelo analítico para la potencia acústica radiada en el campolejano a partir de unos estados auxiliares que resultan de pasar las componentes de velocidadestructural a través de unos filtros de radiación. Esto es equivalente a estimar los modosradiantes (volumétricos) a partir de variables estructurales. A continuación plantean elproblema del control en el espacio de estados, diseñando un controlador realimentado que tienela forma de un problema de control LQG estándar. La solución a este problema involucra el usode un filtro de Kalman.
Se presentan resultados analíticos en una barra de 1 m de larga, 12.5 cm de ancha, y 0.5 mm deespesor. Se consideran excitaciones armónica y de banda ancha. En ambos casos se demuestraque es posible controlar las vibraciones sin atenuar el ruido. Y viceversa, la cancelación delruido en el campo lejano es compatible con incrementos en las vibraciones de los modos. En laterminología de Fuller, parece que el mecanismo de cancelación es el de reestructuraciónmodal.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
32
Autores: S. Koshigoe and J.W. Murdock
Título: A unified analysis of both active and passive damping for a plate with piezoelectric
transducers
Revista: J.A.S.A. Año:1993 Vol.(Num.): 93 (1) Páginas: 346-355
Problema: CAV con actuadores piezoeléctricos Aplicaciones: CAV de una placa
Filtro: Realimentación Teórico/experimental: Ambos
Sistema comercial: No Otros:
Resumen: Este trabajo plantea una formulación del CAV de una placa distinta de la que suele
aparecer en otros trabajos. La mayoría de los trabajos analizados tratan del CAV de una estructura
mediante un control anticipativo, por lo que usan una formulación cuadrática. Este trabajo, en
cambio, acomete un control por realimentación, por lo que se usa una formulación ligeramente
distinta. En concreto, se presentan una serie de ecuaciones que describen el comportamiento
eléctrico y mecánico del conjunto placa+piezoeléctrico. A continuación se usan estas ecuaciones
para formular el control activo realimentado de esta estructura usando el piezoeléctrico como
actuador y un acelerómetro como sensor. Se comparan las predicciones teóricas con los resultados
experimentales sobre una placa de aluminio de (67.5x52.5x0.1) cm, en soporte rígido, a la
frecuencia del primer modo (25 Hz). Se consigue una atenuación de la amplitud de vibración de la
placa de unos 20 dB.
A continuación se describe la ecuación del PZT como sensor terminado con una impedancia
arbitraria. Usando esta ecuación, se describe una estrategia para construir métodos de
amortiguamiento pasivo y activo. Se discuten dos casos límite para el amortiguamiento activo
(impedancia terminal cero e infinito). También, como un resultado de la ecuación del PZT como
sensor, se discute un método de amortiguamiento pasivo que requiere algunas condiciones concretas
para la impedancia terminal.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
33
Autores: A.R. Masters, S.J. Kim, and J.D. Jones
Título: Experimental investigation into active control of compressor noise radiation usingpiezoelectric actuators
Revista: Inter-Noise 92 Año: 1992 Vol(Num): Pág: 395-400
Problema: Control activo estructural Aplicación: CAAE en compresores,refrigeradores…
Teórico/Experimental: Experimental Sistema comercial: No
Extrapolación: No Filtro: FXLMS
Resumen : En este trabajo se investiga experimentalmente el control activo del ruido radiadopor un compresor. Este tipo de ruidos puede reducirse eficazmente atendiendo directamente alas vibraciones de la carcasa dentro de la cual está el compresor ; se trata pues de control activoestructural. Esto implica que las fuentes de control no son altavoces sino actuadores,concretamente se utilizan actuadores cerámicos piezoeléctricos por presentar varias ventajasrespecto a los actuadores convencionales : son más baratos, fácilmente adheribles a lassuperficies…El material piezoeléctrico se deforma mecánicamente al aplicarle una tensión entresus extremos, consiguiéndose así la fuerza necesaria para cancelar la vibración. El actuador sesitúa en la parte superior de la carcasa. Dos señales de error entran en el controlador para adaptarel sistema ; una procedente de un acelerómetro que se aísla para evitar cualquier interferencia ysituado en la parte superior de la carcasa, y un micrófono a 0.6 metros por encima delcompresor, utilizado para detectar la reducción total del campo. El ruido del compresor esperiódico y todos sus armónicos son múltiplos de la frecuencia fundamental del motor, 56 Hz.Un generador crea la señal de referencia a las frecuencias deseadas para el control. Elcontrolador implementa el algoritmo FXLMS para minimizar las señales de error y adaptar elsistema a todos los cambios que se produzcan en el sistema como consecuencia de ladependencia del actuador con la temperatura.
Se escoge la frecuencia de 412 Hz para las pruebas de cancelación, por coincidir con unafrecuencia de resonancia de la cavidad del compresor. Comparando los espectros de las dosseñales de error, se aprecia una reducción de 18 dB a esta frecuencia en la señal del acelerómetromientras la del micrófono aumenta 13.3 dB en el mismo pico. Esto prueba que el acelerómetrodetecta la reducción local de la vibración. Una de las ventajas de este sistema de control activoacústico-estructural es la utilización de estos actuadores piezoeléctricos y acelerómetros en lugarde altavoces y micrófonos, abaratando el coste del proyecto.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
34
Autores: R.A. Burdisso and C.R. Fuller
Título: Theory of feedforward controlled system eigenproperties
Revista: J.S.V. Año: 1992 Vol(Num): 155(3) Pág: 437-451
Problema: Cambio en el comportamientodinámico de un sistema bajo control
Aplicación: CAAE en una barra en soportesimple
Teórico/Experimental: Ambos Sistema comercial: No
Extrapolación: No Filtro: FXLMS
Resumen : Los autores rebaten la creencia generalizada de que un sistema bajo control tiene lasmismas frecuencias y modos propios que el sistema no controlado. Mediante una formulaciónmodal, calculan las frecuencias y modos propios de un sistema SISO bajo control anticipativo.Mediante un desarrollo matemático claro y elegante, demuestran que las frecuencias y modospropios cambian.
Resuelven el problema numérico para el caso concreto de una barra de acero, de 38 cm delongitud, en soporte simple. Para el cálculo de la respuesta modal, con y sin control, se usan 10modos (9 modos en el caso controlado). Se calculan las frecuencias propias, los modos propios,y la respuesta modal, y se verifica numéricamente el cambio de comportamiento dinámico.
Se verifica experimentalmente la hipótesis de los autores en una barra de acero en soportesimple. Como curiosidad, las frecuencias propias teóricas y experimentales coinciden muy bienen ausencia de transductores (los shakers primario y secundario). Sin embargo, en presencia deestos, hay diferencias de hasta el 9 %. En la verificación experimental, implementan elalgoritmo FXLMS en un TMS320C20 de Texas Instruments, para el control del primer modo devibración (32 Hz).
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
35
Autores: K. Naghshineh and G.H. Koopmann
Título: A design method for achieving weak radiator structures using active vibration control
Revista: J.A.S.A. Año:1993 Vol.(Num.): 93 (5) Páginas: 2740-2752
Problema: CAAE de los modos radiantes Aplicaciones: CAAE 1D de una barra en
soporte rígido
Filtro: No Teórico/experimental: Teórico
Sistema comercial: No Otros:
Resumen: Este es una continuación del trabajo publicado por los mismos autores en JASA (1992).
Allí se formulaba el CAAE de la potencia acústica radiada por una barra sujeta por ambos extremos.
Aquí se da un paso más y se formula la potencia acústica radiada en términos de los modos
radiantes y de sus eficiencias de radiación (aquí llamados funciones base y coeficientes de peso,
respectivamente). Sin embargo, existe una diferencia importante con el planteamiento de otros
autores (por ejemplo, con el equipo de Elliott). Otros equipos prefieren mantener el mismo
controlador usado en CAR, por lo que han de diseñar sensores especiales para los modos radiantes.
Los autores de este trabajo presentan otra estrategia de control. Calcular los modos radiantes y sus
eficiencias de radiación, mediante la descomposición en vectores y valores propios de la matriz de
admitancia, medir la respuesta estructural del sistema, calcular la respuesta estructural acoplada con
los modos radiantes (la velocidad de vibración proyectada en las funciones base), y minimizar la
potencia acústica en términos de estos valores. Esta formulación requiere sensores estructurales,
pero no puede aplicar directamente el algoritmo FX-LMS, pues se requieren una serie de cálculos
matriciales previos.
Se presentan los resultados numéricos de la aplicación de esta estrategia al caso de la barra de
aluminio ya analizada en el artículo previo de los autores. Llama la atención el uso exagerado de
sensores y actuadores en la formulación de un caso 1D. Se nota que es una formulación numérica.
Por ejemplo, para el caso de la barra de aluminio en soporte rígido, se requerirían seis sensores (hay
seis modos radiantes significativos en –10 dB), y se incluyen hasta siete actuadores en el modelo.
Claro, que se presenta una curva de reducción de la potencia de hasta 150 dB a 220 Hz.
Como dato interesante, este trabajo contiene figuras de los ocho primeros modos radiantes de la
barra sujeta por los extremos, como una función de la frecuencia entre 100 y 1000 Hz.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
36
Autores: S.J. Elliott and M.E. Johnson
Título: Radiation modes and the active control of sound power
Revista: J.A.S.A. Año: 1993 Vol(Num): 94(4) Páginas: 2194-2204
Problema: CAAE y modos radiantes Aplicación: CAAE 1D (barra) y 2D(panel)
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro: Anticipativo

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
37
Resumen: En primer lugar, los autores exponen la teoría de la potencia acústica radiada poruna estructura en términos de modos estructurales y de radiadores elementales, conectandoambas mediante la matriz de resistencia de radiación modal. Ambas formulaciones tienen elinconveniente de que la matriz que relaciona la variable acústica con la variable estructural noes diagonal. Por tanto, los modos estructurales o los radiadores elementales no sonindependientes unos de otros. A continuación, introducen el concepto de modos radiantes, quese puede desarrollar a partir tanto de los modos estructurales como de los radiadoreselementales. Los modos radiantes surgen cuando uno descompone en vectores propioscualquiera de las dos matrices anteriores. Los vectores propios son los modos radiantes, y losvalores propios son las eficiencias de radiación de estos modos. Como la matriz de valorespropios si es diagonal, los modos radiantes son independientes unos de otros. Desde el punto devista del CAAE, esto quiere decir que cancelando estos modos radiantes se reduce la potenciaacústica radiada.
Se discute la forma de los modos radiantes para una barra y para un panel apantallados. Sedemuestra que si la frecuencia de excitación es lo suficientemente baja como para que ladimensión más grande del radiador sea menor que media longitud de onda, sólo un modoradiante es significativo. Este primer modo radiante significativo es tipo pistón, y por tanto suamplitud es proporcional a la velocidad volúmica de la superficie del radiador. Por tanto, si sepudiera desarrollar un sensor de la velocidad volúmica, un controlador monocanal sería capazde conseguir reducciones significativas de la potencia acústica radiada en baja frecuencia.
Para poder usar controladores convencionales, basados en el algoritmo FX-LMS, la teoría delos modos radiantes requiere el desarrollo de sensores y actuadores adecuados. Los autorescitan algunas posibilidades, pero no se profundiza en ninguna de ellas. Parece ser que unasolución elegante es usar sensores distribuidos (tipo PVDF) que respondan únicamente a lasdistribuciones de velocidad correspondientes a estos modos (sensores modales).

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
38
Autores: S.D. Snyder and N. Tanaka
Título: On feedforward active control of sound and vibration using vibration error signals
Revista: J.A.S.A. Año:1993 Vol.(Num.): 94 (4) Páginas: 2181-2193
Problema: CAAE usando sensores estructurales Aplicaciones: CAAE 2D de una placa en
campo libre y en un recinto
Filtro: Anticipativo Teórico/experimental: Teórico/numérico
Sistema comercial: No Otros:
Resumen: Se trata de un trabajo extraordinario sobre el diseño de sistemas CAAE usando sensores
de error distribuidos. Se empieza planteando una formulación común de problemas estructurales y
acústicos en términos de una función de error, AvvH=J , donde v es un vector de velocidades
estructurales y A es una matriz simétrica, definida positiva, cuyo valor depende del problema
tratado. La descomposición de A en valores y vectores propios da lugar a un desacoplo modal del
problema. Los vectores propios resultantes son ortogonales. Esta descomposición permite el diseño
de sistemas CAAE más eficientes y con menor dimensión. Se particulariza esta formulación general
a tres casos:
• La energía cinética estructural.
• La potencia acústica radiada por una placa delgada en soporte simple.
• La energía potencial acústica en un recinto acoplado.
En los tres casos se discuten tanto aspectos de diseño del sistema CAAE como su posible
implementación práctica. Se demuestra que:
• La estrategia de controlar la energía cinética no es la más efectiva cuando se pretende cancelar
la radiación acústica: pueden existir zonas de refuerzo.
• Se puede conseguir cancelación de la radiación acústica próxima a la óptima usando sensores
de error distribuidos para un número limitado de modos radiantes (cuatro o 5). Las formas de
estos sensores son proporcionales a la segunda derivada de los modos estructurales.
(Recuérdese aquí que Elliott et al. reivindican que con un solo sensor del primer modo radiante
se debería conseguir atenuación notable).
• Las señales proporcionadas por estos sensores distribuidos requieren un filtrado antes de entrar
al sistema CAAE como señales de error. La respuesta de estos filtros coinciden con la variación
de la raíz cuadrada de los valores propios correspondientes con la frecuencia.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
39
Autores: M.E. Johnson, S.J. Elliott, and J.A. Rex
Título: Volume velocity sensors for active control of acoustic radiation
Revista: ISVR Tech. Memor. Año:1993 Vol.(Num.): Páginas: 27
Problema: Diseño de sensores de la velocidad
volúmica
Aplicaciones: CAAE
Filtro: No Teórico/experimental: Teórico
Sistema comercial: No Otros:
Resumen: En baja frecuencia, donde la longitud de onda es grande en comparación a las
dimensiones de la placa, el primer modo radiante (cuya amplitud es la velocidad volúmica) es el
radiador más eficiente de potencia sonora. Este trabajo aborda el diseño de un sensor distribuido
para medir directamente la velocidad volúmica. El sensor distribuido, que puede ser construido, por
ejemplo, con PVDF, ha de tener una función de sensibilidad cuadrática en uno de los ejes de la
placa. Gran parte del trabajo se dedica a cómo implementar este sensor con función de sensibilidad
cuadrática. En concreto, se discute:
• Cómo cancelar la sensibilidad cruzada. Se sugiere usar dos capas de PVDF, conectadas
eléctricamente tal que 313221 / eeqqq −= .
• Cómo implementar la función de forma cuadrática, usando tiras de anchura variable.
• Qué error se comete al implementar un sensor cuadrático continuo como una serie de tiras
discretas.
Uno de los grandes inconvenientes del diseño de estos autores es que se requiere cubrir toda la
estructura con tiras de PVDF. Esto no es práctico ni barato. Ya veremos posteriormente en el trabajo
de Charette et al (1998) como se puede resolver este inconveniente.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
40
Autores: S.J. Elliott
Título: Active control of structure-borne noise
Revista: Journal of Sound andVib.
Año: 1994 Vol(Num): 177(5) Páginas:651-73
Problema: Control activo del ruido y de lasvibraciones estructurales
Aplicación: Control del ruido en cochesy helicópteros
Teórico/Experimental: Ambos Sistema comercial: No
Extrapolación: No Filtro: Adaptativo LMS
Resumen: Las estrategias de control acústico (global o local) y eléctrico (Realimentación oAnticipativo) ya se discuten en otro artículo del autor con Nelson (IEEE SP Magazine, 1993).Aquí se añade la necesidad de considerar el tipo de perturbación (determinista o aleatoria). Elartículo describe los fundamentos teóricos del control activo del ruido y de las vibraciones en elinterior de recintos, y además presenta resultados experimentales.
En cuanto al control del ruido, el número de altavoces que se necesitan para el control global deun campo sonoro en el interior de un recinto crece con el solapamiento acústico modal, el cual,a su vez, se incrementa con el cubo de la frecuencia de excitación. Por tanto, existe un límitepráctico en frecuencia para el control activo del ruido aéreo. De forma similar, el número deactuadores que se requieren para el control de las vibraciones crece con el solapamientoestructural modal, el cual puede llegar a ser excesivamente grande en alta frecuencia. Se puedenusar también métodos de control local para crear zonas de silencio alrededor del altavozsecundario. La eficiencia de este sistema depende de la longitud de onda como una función dela separación micrófono-altavoz. La zona de silencio tiene la forma de una concha alrededor delaltavoz en baja frecuencia, tendiendo a una esfera con centro en el micrófono monitor en altafrecuencia, de diámetro λ/10.
En algunas aplicaciones el ruido se transmite al recinto a través de vías estructurales. Si secontrolan activamente estas vías estructurales, se consigue reducir el ruido en el interior delrecinto. Aunque en principio es necesario controlar seis componentes en cada punto, un buendiseño pasivo consigue reducir este número de componentes a controlar. Se presentan ejemplosdel montaje del motor de un coche que requiere un único actuador, y del engranaje de unhelicóptero que requiere tres componentes. Se demuestra experimentalmente la mayoreficiencia de un sistema activo que controle tanto el ruido aéreo como el estructural.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
41
Autores: Y. Gu, R.L. Clark, C.R. Fuller, and A.C. Zanden
Título: Experiments on active control of plate vibration using piezoelectric actuators andPVDF modal sensors
Revista: J. Vib. Acoust. Año: 1994 Vol(Num): 116 Páginas:303-308
Problema: Comparaciónacelerómetros/PVDF como sensores del CAV
Aplicación: CAV en placas
Teórico/Experimental: Ambos Sistema comercial: TMS320C25 DSP
Extrapolación: No Filtro: FX-LMS
Resumen: Este trabajo trata sobre el diseño de sensores distribuidos 2D de PVDF para lamedida selectiva de modos como señales de error para un sistema de control activo de lasvibraciones. El diseño de los sensores 2D consiste en dos tiras perpendiculares a lo largo de losejes de la placa (una a lo largo del eje x y la otra a lo largo del eje y). El método se ilustradiseñando un sensor de PVDF para la medida de los modos (3,*) en la dirección del eje x y delos modos (*,1) en la dirección del modo y. Se asume que la combinación de los dos ha deproporcionar esencialmente el modo (3,1). El sensor en la dirección del eje x se sitúa en el ejede simetría de la placa para evitar la medida de los modos pares. El sensor en la dirección deleje y se sitúa a lo largo del primer antinodo del modo (3,1). Se usa la placa de la Universidad deAdelaida, es decir placa de acero de dimensiones (380 x 300 x 19 mm) en soporte simple.Como fuente primaria se usa un shaker y como fuentes secundarias dos actuadores cerámicosdobles, de PZT de dimensiones (38 x 31 x 0.19 mm). La señal de error es la proporcionada porel sensor de PVDF o por dos acelerómetros. Simultáneamente se miden amplitudes modales, yse comparan los resultados con y sin control. Se presentan resultados de las medidas del sensormodal y del control a una frecuencia de resonancia y tres frecuencias forzadas. De estosresultados se deduce:
• El sensor modal es más sensible, efectivamente, a las frecuencias que se pretenden, pero esmenos selectivo a los otros modos de lo que se pretendía inicialmente. Aquí es másimportante la ubicación de los sensores que las imperfecciones en su corte.
• Los resultados del control con sensores de PVDF es superior al control con acelerómetros.No obstante, en todos los casos presentados se aprecia un spillover considerable.
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
42
Autores: L.P. Heck and K. Naghshineh
Título: Large-scale, broadband actuator selecting for active noise control
Revista: NOISE-CON 94 Año: 1994 Vol(Num): Páginas:291-296
Problema: Posición de las fuentessecundarias
Aplicación: Control activo acústicoestructural (CAAE)
Teórico/Experimental: Ambos Sistema comercial: No
Extrapolación: No Filtro:
Resumen: El trabajo más reciente sobre control activo del ruido se ha concentrado en dosaproximaciones. En primer lugar, la cancelación mediante fuentes secundarias, la cual seimplementa usualmente mediante sensores del campo primario (micrófonos) y actuadores(generalmente altavoces) para generar el campo secundario en contrafase. La otra aproximación, que se ha encontrado mucho más efectiva, consiste en alterar los propios mecanismos degeneración del ruido en la fuente. Cuando la fuente primaria es una estructura vibrante, elcontrol consiste en usar actuadores (vibradores) para alterar las características de vibración dela estructura, problema que se conoce como Control Activo Acústico Estructural (CAAE).Ambas aproximaciones se basan en la identificación óptima de las posiciones de los sensores yde los actuadores. Recientes trabajos han estudiado este problema para una frecuencia única. Eneste artículo, los autores presentan un método para la optimización de problemas de controlactivo mediante:
• El tratamiento de un gran número de actuadores.• El desarrollo de una técnica computacional más eficiente (descomposición QR).• La selección de la posición óptima de los actuadores en una banda ancha de frecuencias.
Se presentan resultados experimentales del control CAAE de una estructura vibrante queproporciona una atenuación de más de 60 dB en una banda hasta los 1000 Hz.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
43
Autores: F. Simon and S. Pauzin
Título: An active control procedure to reduce in a broad space the noise created by avibrating panel into a room
Revista: NOISE-CON 94 Año: 1994 Vol(Num): Páginas:349-354
Problema: Ruido radiado por paneles envibración
Aplicación: CAAE
Teórico/Experimental: Experimental Sistema comercial: No
Extrapolación: No Filtro: LMS
Resumen: El ruido radiado por estructuras en vibración puede degradar el confort acústico desalas y cabinas de coche y de avión. Para reducir este tipo de ruido se pueden optimizar lascomponentes, pero también se pueden aplicar técnicas de control activo. Como se ha visto enotro trabajo anterior, esta técnica se conoce con el nombre de CAAE (Control Activo AcústicoEstructural).
Este trabajo analiza las posibilidades de una técnica CAAE para reducir la radiación de unpanel ortotrópico espeso cuadrado usando actuadores como fuentes secundarias, y vibradorescomo fuente primaria. El análisis modal y las medidas de presión (en amplitud y fase) permitenconocer la respuesta estructural y la radiación acústica. Se examina la influencia de losvibradores. Se investigan tres modos en el margen de las frecuencias medias (400 a 800 Hz) asus frecuencias naturales (modos (2,2) , (3,1) y (1,3)), y un modo cerca de su frecuencia natural(modo (3,3)).
Los resultados demuestran que la eficiencia espacial del método CAAE depende no solamentedel comportamiento modal del panel (tipo de modos excitados, posición de la frecuencia deexcitación en relación a la frecuencia de resonancia) sino también de las vías de energíaacústica y estructural (interés de las medidas de intensidad acústica y estructural). Además,añadir más micrófonos de control no mejora la reducción si las vías de energía no son lasapropiadas. Finalmente, el comportamiento modal de la estructura puede verse alterado por lafijación del vibrador. Para solucionar este problema se sugiere el uso de actuadorespiezocerámicos.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
44
Autores: C.R. Fuller and G.P. Gibbs
Título: Active control of interior noise in a bussines jet using piezoceramic actuators
Revista: NOISE-CON 94 Año: 1994 Vol(Num): Páginas:389-394
Problema: Control Acústico Estructural(CAAE)
Aplicación: Ruido en el interior deaviones
Teórico/Experimental: Experimental Sistema comercial: No
Extrapolación: No Filtro: FXLMS Multicanal
Resumen: Se presentan resultados de los experimentos preliminares para controlar el ruido enel interior de un jet privado de tamaño medio usando pequeños actuadores piezocerámicospegados al fuselaje. Los resultados demuestran que estos actuadores tienen una autoridadsuficiente para controlar esta situación. Los resultados son mejores a las frecuencias deresonancia del recinto, y empeoran para frecuencias fuera de la resonancia. Se identifica lapérdida de control por causas de no linealidad.
Se usa un filtro FXLMS para controlar 11 micrófonos de error y dos grupos de cuatrosactuadores cada uno. Cada actuador consiste en un piezocerámico G1195 de 3.81 cm x 6.35 cmx 0.254 cm pegado al fuselaje por una resina epoxy. Los resultados a 250 Hz (frecuencia deresonancia) muestran reducciones de entre 20 y 30 dB en las cuatro posiciones de la cabina. Sinembargo, a 195 Hz, los resultados son muy malos.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
45
Autores: W. Dehanschutter, P. Sas, and C. Bao
Título: Active acoustic and structural acoustic control of car cabine noise- Experimentalstudy on a scale model
Revista: NOISE-CON 94 Año: 1994 Vol(Num): Páginas:409-414
Problema: CAAE vs. CAR Aplicación: Ruido en el interior decoches
Teórico/Experimental: Experimental Sistema comercial: TMS320C30
Extrapolación: No Filtro: FXLMS
Resumen: Un problema de interés creciente es el control del ruido generado estructuralmenteen el interior de coches y aviones. El ruido estructural se genera en el tren de potencia o en elrodamiento, por lo que consta de tres componentes fundamentales: (1) las características de lafuente de excitación, (2) la dinámica de la vía de transmisión, y (3) la respuesta del sistemareceptor. No siempre es fácil reducir la fuente de vibración sin degradar la función principal delsietma (la consecuencia indeseada de la generación de potencia es la vibración). Enconsecuencia, el mayor esfuerzo se concentra en controlar tanto la vía de transmisión mecánicay vibro-acústica, como en la respuesta del sistema receptor.
Ya que el contenido frecuencial de este ruido estructural es menor que 600 Hz, las técnicas decontrol pasivo no son las más apropiadas. Aquí parece muy apropiado el Control Activo delRuido (CAR) pero sobre todo el Control Activo Acústico Estructural (CAAE). En estossistemas, el ruido es controlado reduciendo la eficiencia de la radiación del sistema receptor,mediante mecanismos de supresión y reestructuración modal.
En este trabajo se presenta un estudio del diseño de estas dos aproximaciones (CAR, CAAE)para controlar activamente el ruido en el interior de un coche. Se ha construido un modelo aescala de la cabina de un coche, con paredes rígidas y suelo flexible. Los resultados de esteexperimento demuestran que el CAAE proporciona mayores reducciones de ruido que el CAR,incluso con un solo actuador. La razón es que es mucho más complicado producir un camposecundario en contrafase en el interior de un recinto, y más sencillo reestructurar los modos devibración de la superficie flexible.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
46
Autores: C.R. Fuller, M.J. Bronzel, C.A. Gentry, and D.E. Wittington
Título: Control of sound radiation/reflection with adaptive foams
Revista: NOISE-CON 94 Año: 1994 Vol(Num): Páginas:429-436
Problema: Control del ruido radiado yreflejado
Aplicación: Absorbentes activos
Teórico/Experimental: Experimental Sistema comercial: TMS320C30
Extrapolación: No Filtro: LMS
Resumen: Una capa de material poroso es efectivo como absorbente pasivo solo si su espesores del orden de la longitud de onda de la radiación incidente. Esto los hace poco útiles a bajasfrecuencias. Por ello se han comenzado a desarrollar los absorbentes activos, o espumas activas.La fase sólida de estas espumas puede ser forzada a crear una adaptación perfecta deimpedancias con la onda plana incidente, absorbiendo de este modo completamente el sonido.Algunas de estas espumas activas son fabricadas por medio de materiales piezoeléctricos. Paraobjetos sumergidos se han desarrollado un recubrimiento activo que consiste en un actuadorpiezocomposite y unos sensores polímeros piezoeléctricos.
Los autores presentan aquí una espuma activa cuyo elemento consiste en una pieza circular deespuma de poliuretano parcialmente reticulada alineada internamente con una capa fina de unpolímero piezoeléctrico, el Polivinilideno fluoroso (PVDF). Esta espuma activa sirve paracontrolar tanto el ruido radiado como el reflejado. Se presentan resultados experimentales encámara anecoica, para el ruido radiado, y en un tubo de ondas estacionarias, para el ruidoreflejado. En ambos casos se usa un TMS320C30 para implementar un filtro LMS. En elexperimento de radiación, se superpone una capa de espuma activa en la cara radiante de unpistón y los resultados son espectaculares: una reducción de unos 20 dB en un sector angular de180 º, a una frecuencia de 340 Hz. En el experimento de reflexión se situa la espuma activa enun extremo del tubo de ondas estacionarias, y los resultados tambien son extraordinariamentebuenos entre 100 y 300 Hz, con una reducción adicional de hasta 55 dB.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
47
Autores: F. Charette, C. Guigou, and A. Berry
Título: Development of volume velocity sensors for plates using PVDF film
Revista: ACTIVE 95 Año: 1995 Vol.(Num.): Páginas: 241-252
Problema: Diseño de sensore volúmicos Aplicaciones: CAAE 2D
Filtro: No Teórico/experimental: Ambos
Sistema comercial: Otros:
Resumen: Se trata de un trabajo en la línea de otros publicados por los mismos autores en otras
revistas. Dado que la potencia radiada por una estructura 2D en baja frecuencia está dominada por el
primer modo radiante, modo volumétrico, modo pistón, o modo monopolar, se trata de planetar una
estrategia CAAE que minimiza el desplazamiento de volumen total de la placa, usando una
cerámica PZT como actuador y un sensor distribuido de PVDF para el desplazamiento de volumen.
La gran ventaja de esta estrategia es la simplicidad del controlador resultante (SISO). Pués bien, el
objetivo de este artículo es explicar la metodología del diseño del sensor PVDF para el
desplazamiento de volumen.
El sensor consiste en dos tiras perpendiculares de PVDF. La aportación fundamental de este trabajo
es el cálculo de las formas geométricas de estas tiras. Se parte de las formas de los modos
estructurales, medidas experimentalmente usando vibrometría laser (hay 12x12 puntos de medida)
combinado con el paquete de análisis modal STAR MODAL. Las formas modales medidas
experimentalmente, junto con la ecuación de Lee&Moon para la carga proporcionada por un sensor
distribuido de PVDF, conducen a un sistema de I ecuaciones lineales, donde I es el número de
formas modales consideradas, para los R+S coeficientes, αr y βs, que determinan las formas del
sensor en las direcciones x e y de la placa. Es importante enfatizar que:
• El diseño parte de las formas modales experimentales, por lo que es válido para cualesquiera
condiciones de contorno.
• La forma de los sensores resultantes es independiente de la frecuencia.
• La posición de las líneas a lo largo de las cuales se sitúan los sensores es crítica. Esto es debido
a una simplificación en el cálculo de las formas de los sensores, según la cual la anchura del
sensor es mucho menor que la coordenada de la posición de dicho sensor.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
48
Autores: W. Dehandschutter, R. van Cauter, and P. Sas
Título: Active structural acoustic control of structure borne road noise: Theory, simulations,and experiments
Revista: ACTIVE-95 Año: 1995 Vol(Num): Páginas:735-746
Problema: Control CAAE del ruido derodadura
Aplicación: Ruido de rodadura envehículos
Teórico/Experimental: Experimental Sistema comercial: TMS320 C40
Extrapolación: Filtro: FXLMS
Resumen: El ruido de rodadura se transmite al interior del habitáculo a través de lasconexiones del chasis con la suspensión. La tendencia de la industria de la automoción es ahacer coches más ligeros, que proporcionan una atenuación pasiva menor. Para aumentar elaislamiento al ruido de rodadura se puede usar el control CAAE (señal de error acústica,actuadores sobre la superficie vibrante). Los autores presentan resultados preliminares de unproyecto Brite-Euram (ANRAVA) para control CAAE del ruido de rodadura en habitáculos decoches. El control se implementa mediante el algoritmo FXLMS en una placa TMS320 C40 deTI. Se hace un análisis teórico exhaustivo de la configuración óptima de sensores y actuadores.Se analiza el efecto de la coherencia mutua de las señales de referencia con las de error, y de losretardos, en la máxima atenuación que se puede conseguir mediante esta estrategia.
Se presentan resultados experimentales en un prototipo (station wagon) en condiciones delaboratorio. El ruido de rodadura de banda ancha se simula mediante un vibrador en un bancode rodillos. Las señales de referencia se captan con acelerómetros en el eje de las ruedas. Losactuadores se sitúan en la parte trasera del chasis, lo más próximo posible a la suspensión. Lasseñales de error las proporcionan dos micrófonos próximos a los asientos traseros. Se consigueuna atenuación promedio de 15.2 dB en la banda de 70 a 320 Hz, cuando se excitaprimariamente solo en una rueda. Cuando se excitan simultánemente las dos ruedas traseras, seconsigue una atenuación media de 7.8 dB entre 50 y 160 Hz.
Contiene buenas referencias del control activo del ruido de rodadura en coches.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
49
Autores: K. Wyckaert, H. van der Auweraer, and L. Hermans
Título: An approach for the simulation of active control sensor and actuator configurationsfor rolling noise reduction in automotive vehicles
Revista: ACTIVE-95 Año: 1995 Vol(Num): Páginas:747-754
Problema: Configuración geométrica CAAE Aplicación: Ruido de rodadura envehículos
Teórico/Experimental: Simulación Sistema comercial:
Extrapolación: Filtro:
Resumen: Existen métodos para optimizar la configuración geométrica de las fuentes decontrol y de los sensores de error, para el caso de una única señal de referencia. Este trabajotrata de la extensión de uno de estos métodos en el dominio de frecuencias al caso de múltiplesseñales de referencia, en el contexto del CAR del ruido de rodadura en coches. Primero secaracterizan las funciones de transferencia en el habitáculo del coche. Para la modelización delsistema con múltiples referencias se adopta una aproximación que permite describir elproblema como una superposición de problemas virtuales con referencia única. Esto permitecorrer la simulación para cada una de estas configuraciones virtuales de referencia única. Acontinuación se combinan, en un sentido rms, todas las configuraciones virtuales para evaluarel funcionamiento de la configuración global. Se demuestra la potencialidad del métodoaplicándolo al control CAAE del ruido de rodadura en el interior de un coche. Las funciones detransferencia de la modelización son las medidas experimentalmente (con un software deLMS). En la simulación se usan 8 sensores de error (4 en el techo, encima de las cabezas, 4 enlas posiciones de las cabezas) y 30 posiciones posibles para los actuadores, a lo largo de lasuspensión del coche. El modelo elaborado permite estimar la máxima cancelación que sepuede conseguir mediante esta estrategia de control. La utilidad de la simulación se demuestracomparando los resultados con 8 y con 12 actuadores. En ambos casos se puede obteneraproximadamente la misma cancelación, pero el esfuerzo de control con 12 actuadores esmenor.
Se trata de un trabajo financiado por un Programa Brite-Euram (BE5931).

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
50
Autores: K. Wyckaert, W. Dehandschutter, and G.L. Banfo
Título: Active vibration control of rolling noise in a passenger car: performance evaluationof actuator and feedback sensor configuration
Revista: ACTIVE-95 Año: 1995 Vol(Num): Páginas:755-766
Problema: Control CAAE Aplicación: Ruido de rodadura envehículos
Teórico/Experimental: Experimental Sistema comercial:
Extrapolación: Filtro: Realimentación (acústico yvibracional) y Anticipativo (FXLMS)
Resumen: Es una continuación del trabajo anterior, que presenta resultados experimentalespara validar el método numérico de optimización de la configuración de fuentes y sensores parael caso de múltiples referencias. El problema es usar actuadores, situados en el chasis delvehículo próximos a las vías de transmisión desde la suspensión del coche, para reduciractivamente el ruido transmistido al interior (control CAAE). Existen 10 posiciones candidataspara situar actuadores, cada uno de ellos triaxiales. Ya que hay cuatro fuentes de ruido primario,las cuatro ruedas, es necesario usar referencias múltiples.
El experimento se realiza primero en condiciones de laboratorio. El ruido de rodadura se simulalanzando un chorro de aire sobre las ruedas. Se comparan los resultados de un control SISO,con un acelerómetro como sensor y un actuador como fuente (control co-localizado), y con unmicrófono como sensor y un actuador como fuente (control no co-localizado). Los resultadosdemuestran que el primer caso reduce las vibraciones pero no el ruido, al contrario que elsegundo. Con un micrófono como sensor se consigue una atenuación promedio de 6.7 dB, entre50 y 200 Hz. Estos resultados experimentales están en buena concordancia con las prediccionesdel modelo numérico. Para el caso MIMO solo se presentan resultados de simulaciones. Para elcaso de 8 sensores de referencia y 4 fuentes de control se pronostica una reducción de 2 dB,entre 80 y 300 Hz. Es obvio que el control CAAE del ruido de rodadura necesita un mayordesarrollo para su implementación futura. Se apunta en la dirección de mejorar los actuadores,los parámetros del control,..

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
51
Autores: S.D. Snyder, N. Tanaka, K. Burgemeister, and C.H. Hansen
Título: Direct-sensing of global error criteria for active noise control
Revista: ACTIVE-95 Año: 1995 Vol(Num): Páginas: 849-860
Problema: Diseño de sensores distribuidos Aplicación: CAV/CAAE 2D
Teórico/Experimental: Ambos Sistema comercial: No
Extrapolación: No Filtro: No
Resumen: Se trata de un artículo muy similar al publicado por Snyder&Tanaka en otrasrevistas. Es decir, se discute el diseño de sensores modales distribuidos modales de una placadelgada en soporte simple. En los artículos en revistas se describe con mayor detalle laformulación matemática del problema. En este trabajo se pobe más énfasis en los conceptossubyacentes y en los aspectos prácticos. La idea es medir modos estructurales o modosradiantes (agrupaciones de modos estructurales) usando tiras de PVDF, con una formadeterminada y situados convenientemente sobre la placa. Más concretamente, la ubicación delos sensores y su forma geométrica determina el tipo y número de modos medidos. El procesode diseño incluye:
• La determinación del margen de frecuencias de interés y de los modos estructuralesincluidos en él. Cálculo de los modos radiantes, y número de modos que se pretendencancelar.
• La determinación de qué indice modal (x o y) tiene el mayor número de índices diferentesen este margen. La orientación del sensor en esta dirección reduce el número de sensores adiseñar.
• La determinación del número de sensores necesarios y de su correspondiente forma. Paraello, agrupar los modos en series con el mismo número-índice en la dirección del sensor.Por ejemplo, para medir los modos (impar, impar) con sensores en la dirección y, los modos(1,1), (3,1), (5,1),.., estarían en un grupo, los modos (1,3), (3,3), (5,3),.., estarían en otrogrupo, y así sucesivamente. Después se aplican unas ecuaciones descritas en el artículo paradeterminar la forma de los sensores.
Se ilustra el proceso diseñando un sensor consistente en tres tiras de PVDF a lo largo del eje yde una placa de acero de (380 x 300 x 2 mm), para medida del modo (1,1). Los resultadosexperimentales validan el procedimiento.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
52
Autores: S.D. Snyder, N. Tanaka and Y. Kikushima
Título: The use of optimally shaped piezo-electric film sensors in the active control of free field
structural radiation, Part 1: Feedforward control
Revista: J. Vib. Acoust. Año:1995 Vol.(Num.): 117 Páginas: 311-322
Problema: Diseño de sensores distribuidos Aplicaciones: CAAE 2D de una placa en
soporte simple
Filtro: FX-LMS Teórico/experimental: Ambos
Sistema comercial: No Otros:
Resumen: Se trata de un trabajo muy similar a otros de Snyder&Tanaka sobre el diseño de
sensores modales distribuidos de PVDF para el CAAE/CAV de estructuras. En este caso, además
del diseño de sensores distribuidos se presta atención especial a los aspectos del control
anticipativo. Es decir, se plantea una función de coste a minimizar, que incluye la contribución de
las fuentes primaria y secundaria, y se calcula alguna variable de las fuentes secundarias para que la
función de coste sea mínima. En este caso, la función de coste a minimizar es la potencia acústica
radiada, y las variables de control que resultan de minimizar la función de coste son las fuerzas
aplicadas a las fuentes secundarias. En primer lugar se hacen simulaciones numéricas. Se presta
especial atención a la comparación de dos estrategias de control: control estructural, donde se
cancelan modos vibración de la placa, y control acústico-estructural, donde se cancelan modos
radiantes de la placa. Se demuestra que la cancelación de modos radiantes proporciona mayor
cancelación de la potencia acústica radiada.
En la verificación experimental se usa una placa delgada de acero de (1.8 m x 0.88 m x 10.1 mm) en
soporte simple. Las fuentes primaria y secundaria son sendos shakers, dentro de un
encapsulamiento. Se diseñan sensores de PVDF de 25 µm para el modo estructural (3,1) y para los
tres primeros modos transformados, cada uno de ellos compuesto de tres tiras. Hay detalles
prácticos interesantes sobre como pegar las tiras a la placa, y sobre el conexiado eléctrico de ellas.
Se presentan resultados experimentales del control anticipativo, implementado en el algoritmo FX-
LMS, de ruido radiado cuando la placa es excitada armónicamente, a diferentes frecuencias de
resonancia y forzadas, y con ruido de banda ancha filtrado en 300 y 400 Hz. Los resultados
experimentales confirman la superioridad de la estrategia del CAAE usando sensores para los
modos transformados.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
53

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
54
Autores: M.E. Johnson and S.E. Elliott
Título: Active control of sound radiation using volume velocity cancellation
Revista: J.A.S.A. Año: 1995 Vol(Num): 98(4) Páginas: 2174-2186
Problema: CAAE y modos radiantes usandosensores de velocidad volúmica
Aplicación: CAAE 2D (panel)
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro: Anticipativo o Realimentación
Resumen: Se trata de una continuación del trabajo de los mismos autores en 1993. Secomparan los resultados del control de la potencia radiada con el control de la velocidadvolúmica. La velocidad de volumen de la superficie radiante es proporcional a la amplitud delprimer (y más eficiente) modo radiante. Por consiguiente, la estrategia de controlar la velocidadde volumen equivale a controlar el modo más radiante de la estructura.
Se presenta el modelo teórico para una placa. El modelo es más completo que en el artículoanterior. La placa puede ser excitada por una onda plana (transmisión) o por un actuador(radiación). El control de la potencia acústica radiada puede aumentar los niveles de vibración ola presión sonora en la misma placa (control spillover). Se demuestra que este spilloverdesaparece cuando se usa un actuador de fuerza uniforme en lugar de una cerámicapiezoeléctrica. Esto tiene la ventaja adicional de incrementar el margen de frecuencias decontrol. Una buena disposición de control sería entonces usar parejas acopladas desensores/actuadores. Como la función de transferencia entre este par de transductores es de fasemínima, puede compensarse mediante un filtro inverso. Es decir, una estrategia realimentadadaría lugar a resultados de cancelación similares a una anticipativa, con las ventajas adicionalesde que no requiere señal de referencia y que podría usarse con ruidos de banda ancha. Además,el filtro realimentado sería un simple AmpOp de ganancia alta y un inversor de fase.
También se discuten los mecanismos de cancelación. Según Fuller et al (1991) cuando se excitala placa a una frecuencia distinta de una resonancia, el mecanismo de cancelación es larestructuración modal. Cuando uno representa los modos radiantes, esta reestructuración modalequivale a un desplazamiento la contribución desde los modos más radiantes a los menosradiantes.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
55
Autores: M.E. Johnson and S.J. Elliott
Título: Experiments on active control of sound radiation using a volume velocity sensor
Revista: SPIE Año:1995 Vol.(Num.): 2443 Páginas: 658-669
Problema: Diseño de sensores de la velocidad
volúmica
Aplicaciones: CAAE 2D de una placa de
aluminio sujeta por los extremos
Filtro: Manual Teórico/experimental: Experimental
Sistema comercial: No Otros:
Resumen: Se trata de una continuación de otros trabajos de los mismos autores sobre el diseño de
sensores distribuidos de la velocidad de volumen como señales de error para sistemas CAAE. En
este trabajo se pone énfasis en la descripción de los resultados experimentales en el CAAE del
sonido radiado por una placa de aluminio de (27.8 cm x 24,7 cm x 1 mm), rígidamente encastrada,
sobre una caja cerrada. La fuente primaria es un altavoz dentro de la caja. Como fuentes secundarias
se usan una cerámica PZT de (2.5 cm x 2.5 cm) y un actuador inercial construido con un altavoz
unido con plastilina a la placa. Como sensor se usa uno de PVDF de 52 mm, pegado a la placa con
adhesivo 3M. La forma del sensor se consigue atacando con ácido una película de PVDF, de forma
similar a como se hacen los circuitos integrados (técnica PCB). El control es manual. Se ajustan la
ganancia y la fase del actuador hasta que la señal del sensor se atenúa como mínimo 40 dB. En estas
condiciones se mide la presión acústica en unos micrófonos rodeando la fuente según la norma ISO
3745. Se describen dos tipos de resultados experimentales:
• La atenuación de la potencia sonora radiada, como una función de la frecuencia, predicha a
partir de las medidas experimentales de las funciones de transferencia de las vías primaria y
secundaria, ambos con el actuador cerámico y con el inercial. Con el actuador cerámico se
consiguen resultados (predichos) excelentes, pues sólo se excitan modos impares. En cambio, con
el actuador inercial, existen zonas importantes de refuerzo, debido a la generación de modos
pares.
• La atenuación de la presión acústica radiada en un micrófono situado en el campo lejano,
cuando se usa el actuador cerámico como fuente secundaria, a diferentes frecuencias. En este caso,
las atenuaciones medidas son incluso superiores a las predichas. Esta discrepancia se atribuye a
errores en las medidas de las funciones de transferencia. Se miden atenuaciones de hasta 24 dB.
Hay que destacar que los resultados anteriores son con un CAAE SISO, es decir con un solo sensor
y un actuador.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
56

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
57
Autores: D.J. Rossetti and M.A. Norris
Título: A comparison of actuation and sensing techniques for aircraft cabin noise control
Revista: Noise Control Eng. J. Año: 1996 Vol(Num): 44(1) Páginas:53-58
Problema: Comparación CAR vs CAAEpara el control del ruido estructural
Aplicación: Ruido en cabina de aviones
Teórico/Experimental: Experimental Sistema comercial: No
Extrapolación: Filtro:
Resumen: Se trata de un trabajo experimental donde se comparan los resultados decancelación CAR y CAAE en una sección del fuselaje de un avión de Havilland DASH-7. Elruido se genera con dos altavoces en el exterior del avión. Para el control CAR se usan 4altavoces en las secciones de entrada y salida del modelo de avión (un cilindro hueco, con unaplataforma que simula el suelo). Para el control CAAE se usan 4 actuadores del tipo inercialdistribuidos sobre el fuselaje en un círculo aproximadamente en la mitad del cilindro. Comosensores de error se usan 8 micrófonos en ambos casos, distribuidos uniformemente en elinterior del cilindro. Los resultados demuestran que:
• La cancelación CAAE es superior a la CAR en unos 40 dB, en la banda (60 , 74) Hz.• Se obtienen cancelaciones CAR y CAAE similares, de unos 10 dB, en la banda (130 , 150 )
Hz.• Se obtienen cancelaciones similares, de unos 4 dB, en la banda (200 , 220 ) Hz.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
58
Autores: W.R. Saunders, H.H. Robertshaw, and R.A. Burdisso
Título: A hybrid structural control approach for narrow-band and impulsive disturbancerejection
Revista: Noise Control Eng. J. Año: 1996 Vol(Num): 44(1) Páginas:11-21
Problema: Ruido estructural Aplicación: Ruido de banda estrecha eimpulsivo
Teórico/Experimental: Ambos Sistema comercial:
Extrapolación: Filtro: Híbrido Realimentación-Anticipativo
Resumen: Se introduce una arquitectura híbrida de control que combina la supresión porrealimentación de transitorios con la cancelación robusta anticipativa de una perturbación debanda estrecha . Primero se introduce una formulación general del controlador, sin entrar en eldetalle de los algoritmos de realimentación y anticipativo específicos. Se demuestra que laintroducción de un bucle de realimentación en la vía anticipativa adaptativa conduce a unaconvergencia más rápida del compensador adaptativo. Se demuestra que esta mejora de lascaracterísticas de convergencia es muy importante para el funcionamiento del controladaptativo en presencia de una perturbación impulsiva. Una contribución importante delcontrolador híbrido que se propone es la generación de una señal de referencia incontrolablepara el filtro adaptativo via una estimación Kalman de la perturbación. El análisis delcompensador híbrido demuestra que la nueva ley de control funciona como un controladorrealimentado adaptativo que usa la perturbación estimada como señal de referencia. Se presentauna demostración del controlador híbrido en el caso de un placa sometida a una perturbación debanda ancha, transitoria y persistente. Los resultados numéricos y experimentales se basan en laimplementación de un regulador cuadrático gausiano lineal y discreto para el bucle derealimentación, y un algoritmo FX LMS anticipativo adaptativo. Los resultados de lassimulaciones y de los ensayos confirman la mejora en la convergencia, estabilidad, y robustezde funcionamiento en la compensación de la perturbación, y la reducción de la sensibilidad delfiltro adaptativo a perturbaciones transitorias. El diseño híbrido puede mejorar potencialmentela efectividad CAR en problemas de ruido industrial y vibraciones caracterizados por unamezcla de perturbaciones impulsivas y persistentes.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
59
Autores: N. Tanaka
Título: Vibrational and acoustic power flow of an actively controlled thin plate
Revista: Noise Control Eng. J. Año: 1996 Vol(Num): 44(1) Páginas:23-33
Problema: Vibración estructural Aplicación: Control del flujo de potenciavibracional
Teórico/Experimental: Sistema comercial:
Extrapolación: Filtro: Anticipativo
Resumen: Se examinan las características del flujo de potencia vibracional real de un panelrectangular sometido a un control anticipativo de las vibraciones. La fuente de control esligeramente subóptima, en el sentido de que la fuente primaria está produciendo una ligeracantidad de potencia vibracional real, y la fuente de control está absorbiendo la misma cantidad.Se encuentra que la vía del flujo de potencia es una combinación de traslaciones y rotaciones.Estas últimas se producen por la interferencia de dos modos que da lugar a “un bloquegenerador de vórtices”. Se presenta una fórmula cualitativa para predecir el número de vórticesde flujo de potencia, así como una discusión del periodo de los vórtices. Después se discute unafórmula cuantitativa para expresar el flujo de potencia de vórtices desde el punto de vista deuna función de corriente. Se muestra también un método nuevo para inducir un vórtice en unaposición arbitraria de la lámina, que puede tener aplicaciones prácticas en el control de latrayectoria del flujo de potencia vibracional en sistemas grandes. Además, se investiga lainfluencia del flujo de potencia del vórtice inducido en la distribución de intensidad acústica dela lámina, demostrando que la dirección rotacional del vórtice en la lámina no siempre es lamisma que la de la intensidad acústica en el campo próximo.
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
60
Autores: K. Naghshineh and V.B Mason
Título: Reduction of sound radiated from vibrating structures via active control of localvolume velocity
Revista: Applied Acoustics Año: 1996 Vol(Num): 47 Páginas: 27-46
Problema: Ruido estructural Aplicación: Ruido interior en aeronaves
Teórico/Experimental: Ambos Sistema comercial: UAF42 de BB
Extrapolación: Filtro: Analógico
Resumen: Cuando el ruido es de origen estructural, sabemos que es más efectivo tratar decancelar el ruido actuando sobre la propia estructura (control CAAE). Este trabajo ataca elmismo problema con otro planetamiento. Sabemos que la velocidad de volumen de una placa esproporcional al producto de la velocidad superficial por el área. La velocidad superficial sepuede medir con un acelerómetro y el área se conoce. Luego la velocidad de volumen de lafuente primaria es una cantidad medible. Se trataría por tanto de situar una o varias fuentessecundarias sobre la placa que radiasen la misma velocidad de volumen sólo que en fasecontraria. Este principio tan elemental se valida con una placa circular pequeña, usando unasóla unidad de control secundaria. La unidad de control consta de:
• Un aceleróemtro para medir la velocidad superficial de la placa (PCB Piezotronics 353ª16).• Un altavoz para generar la señal secundaria (Polk Model MM3500 de 3.5 “).• Un circuito analógico que implementa la función de transferencia del controlador (un MCL
1304 para el preamplificador del acelerómetro, un Philips TDA1519UA para el amplificadordel altavoz, y un BB UAF42 para la función de transferencia).
En principio, se trata de un filtro no adaptativo. Se analiza en cámara anecoica elcomportamiento de este sistema como una función del ángulo, de la distancia vertical en ladirección del eje acústico, y de la distancia horizontal . Se consiguen reducciones globales de10-13 dB en la década (50 , 100) Hz.
Mediante simulación numérica se extiende el sistema al caso de varias unidades de controlindependientes sobre una placa. Se analiza el funcionamiento sobre una placa rectangular de(1x0.6) m2, y 6.35 mm de espesor. Existen 7 modos en la banda de interés. Se usan hasta 6unidades de control independientes. Se demuestra que es posible conseguir cancelacionesimportantes mediante este sistema.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
61
Autores: N. Tanaka, S.D. Snyder, and C.H. Hansen
Título:Vorticity characteristics of the vibrational intensity field in an actively controlled thinplate
Revista: J.A.S.A. Año: 1996 Vol(Num): 99(2) Páginas: 942-953
Problema: Intensidad vibracional de láminascontroladas activamente
Aplicación: Control Activo de lasVibraciones
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro: Anticipativo
Resumen: Se trata de un trabajo analítico sobre la estructura del campo de intensidad de unalámina fina, simplemente soportada, excitada armónicamente y controlada activamente [láminade acero de 9 mm de espesor y (0.88x1.8) m2 ]. Se manejan conceptos físicos análogos a ladinámica de fluidos: vórtices, función corriente de energía aproximada, líneas de corriente,vorticidad, etc.. Se presta especial atención al flujo de potencia de los vórtices, los cuales tienenel potencial de confinar la energía en zonas específicas de la placa. Como función de coste seusa la energía cinética de la placa (proporcional a la suma de los cuadrados de las velocidadesde vibración). Cuando se minimiza la energía cinética de vibración el flujo de potencia es cero.Sin embargo, que el flujo de potencia sea cero es sólo una condición necesaria para que laenergía cinética estructural sea mínima. En cuanto a los vórtices, estos se producen cuando seexcitan simultáneamente dos modos muy próximos de la placa. Se determinan los patrones deintensidad de estos vórtices y la función de corriente de energía aproximada. De hecho, ladirección del vertor intensidad de vibración es tangente al contorno de la función de corrientede energía aproximada. Se determinan también el número y la dirección de los vórtices, a partirde los cuales se introduce una función vorticidad para describir con detalle el flujo de potenciade los vórtices.
En resumen, se trata de un artículo muy teórico, para decribir la distribución de intensidad enuna lámina controlada activamente. El interés práctico puede estar en la posición de lossensores de error en un sistena de Control Activo de las Vibraciones. De hecho, en un sistemamecánico se producen movimientos traslacionales y rotacionales. Los movimientos rotacionalespueden ser descritos por los vórtices.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
62
Autores: S. Koshigoe, A. Teagle, C.H. Tsay, S. Morishita, and S. Une
Título: Numerical simulation of active control with on-line system identification on soundtransmission through an elastic plate
Revista: J.A.S.A. Año: 1996 Vol(Num): 99(5) Páginas: 2947-2954
Problema: Algoritmo rápido deidentificación del sistema en CAAE. Efecto dela temperatura en el CAAE
Aplicación: Ruido en la cofia de sistemasaeroespaciales
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro: Anticipativo
Resumen: Se presenta una simulación numérica para el problema del control del ruido en lacofia de vehículos aeroespaciales. Las vibraciones estructurales causadas por fuentes externaspueden crear presiones acústicas en el interior de la cofia de hasta 130 dB (según colegas deCASA, los niveles pueden ser de hasta 145 dB). Generalmente se usan sistemas pasivos parareducir los niveles de ruido, como paneles de fibra de vidrio de 1” o 2 “ de espesor, materialesviscoelásticos, o incluso unas bolsas que actúan como absorbentes. La efectividad de estossistemas pasivos es alta por encima de 400 Hz. En baja frecuencia, se puede usar el CAAE.Existen sistemas comerciales para el CAAE. Los autores llaman la atención sobre dos datosimportantes:
• Durante su ascensión, un vehículo de estos recorre una trayectoria atmosférica de unos 60 s.• Durante este tiempo, la temperatura desciende bruscamente.
Este trabajo introduce estos dos aspectos en el estudio del sistema CAAE. Introducen unalgoritmo de identificación del sistema más rápido que el convencional. En los coeficientesmodales del interior de la cavidad, la velocidad del sonido depende de la temperatura. En lasimulación numérica, varían la temperatura desde su valor original hasta la mitad en 60 s. Parala modelización usan una cavidad rectangular cuya superficie superior es una lámina librementesoportada. La fuente de ruido está en el exterior, a 2 m sobre el eje del sistema. Sobre la láminahay un actuador de cerámica doble, y en el fondo de la cavidad está el micrófono de control. Sehacen dos simulaciones. En la primera, a una temperatura fija se barre en frecuencias alrededorde dos modos de la cavidad en 20 s. En la segunda, se mantiene la frecuencia de excitación fija,y se reduce la temperatrura a la mitad en 60 s, lo que equivale a un barrido en frecuencias de 85Hz. En ambos casos se consiguen atenuaciones de unos 40 dB.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
63
Autores: B.T. Wang
Título:Optimal placement of microphones and piezoelectric transducer actuators for far-fieldsound radiation control
Revista: J.A.S.A. Año: 1996 Vol(Num): 99(5) Páginas: 2975-2984
Problema: Optimización de sensores yactuadores mediante AG
Aplicación: CAAE 1D (barras)
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro: Anticipativo
Resumen: Para optimizar la posición de sensores y actuadores en un sistema CAAE senecesita definir una función objetivo y un algoritmo de optimización. La función objetivodependerá del problema particular. En este caso se trata de la potencia total radiada(proporcional al cuadrado de la presión acústica en el campo lejano) por una barra librementesoportada, sometida a una fuerza primaria por un shaker y a unos momentos de control (ondasflexionales) por un actuador piezoeléctrico, constituido por un par de cerámicas, una a cadalado de la barra, excitadas en contrafase. La presión acústica en el campo lejano estárelacionada con las vibraciones verticales de la barra por la integral de Rayleigh. En estetrabajo se presentan todas las ecuaciones del modelo. Se aplica le teoría del control óptimolineal cuadrático (LQOCT) que minimiza la presión acústica en un número finito demicrófonos. Como algoritmo de optimización se usa un Algoritmo Genético (AG).
Se hace una simulación numérica con una barra simplemente soportada de acero de 0.38 m delarga, 0.04 m de ancha y espesor 2 mm. Se aplica una fuerza primaria de 0.3 N, y se usa unactuador de PZT G-1195. Los micrófonos se sitúan en un plano (Φ=0) a 3 m del centro de labarra, con el ángulo θ como variable. El problema es encontrar las posición del actuador (en eleje x) y de los micrófonos (en el ángulo θ) que minimizan la función objetivo. Para ilustrar losresultados se usan diagramas en polares de la presión acústica, distribuciones dedesplazamiento en la barra, y espectros espaciales de la velocidad superficial. Se analizan losresultados a las frecuencias de los tres primeros modos y a otras dos frecuencias intermedias. Seencuentra que la cancelación es tanto mayor cuanto más baja es la frecuencia y cuanto mayor esel número de micrófonos. A las frecuencias modales se obtiene una atenuación mucho mayor,como cabía esperar. Es interesante notar que en el caso del segundo y tercer modo, el actuadortiene un borde sobre una línea nodal. Los espectros espaciales confirman que a las frecuenciasde resonancia predomina el mecanismo de supresión modal, mientras que a frecuenciasintermedias predomina el mecanismo de reestructuración modal.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
64
Autores: S.D. Snyder, N. Tanaka and Y. Kikushima
Título: The use of optimally shaped piezo-electric film sensors in the active control of free field
structural radiation, Part 2: Feedback control
Revista: J. Vib. Acoust. Año:1996 Vol.(Num.): 118 Páginas: 112-121
Problema: Diseño de sensores distribuidos Aplicaciones: CAAE 2D de una placa en
soporte simple
Filtro: Feedback analógico y digital Teórico/experimental: Ambos
Sistema comercial: No Otros:
Resumen: Se trata de la continuación del trabajo en la Parte 1 de los mismos autores. Allí se
enfatizaban los aspectos de control anticipativo, y se explicaba como se diseñaban los sensores
distribuidos de PVDF para el modo estructural (3,1) y para los tres primeros modos transformados.
Aquí se usan los mismos sensores, en la misma placa de acero, pero usando dos estrategias de
control por realimentación: una analógica y otra digital adaptativa. Primero se plantea el problema
teórico. Se define el problema del control en el espacio de los estados. Se obtiene la función de
coste que hay que minimizar, las ecuaciones del control, etc. Se comparan las estrategias de
controlar los modos estructurales o los modos radiantes. Se demuestra que si se usan sensores para
los modos radiantes como sensores de error, el problema está desacoplado.
En la parte experimental, se comparan los resultados de un controlador analógico y uno digital. En
ambos casos se mide la potencia acústica radiada, a partir de los datos de la intensidad en una malla
de 24x12 puntos, antes y después del CAAE. Con el controlador analógico se consiguen
cancelaciones de 20 dB, 15 dB, y 8 dB, de los modos (1,1), (2,1) y (3,1), respectivamente, pero se
observa un refuerzo importante a las frecuencias por encima de 125 Hz. Esto es malo, puesto que el
oido humano es más sensible a estas frecuencias más altas, lo cual oscurece el posible beneficio de
la reducción de las frecuencias más bajas. Con el controlador digital se reduce la máxima
atenuación de los modos (1,1), (2,1) y (3,1) a 17, 12 y 10 dB, respectivamente, pero se evita el
refuerzo a las frecuencias más altas.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
65
Autores: N. Tanaka, S.D. Snyder and C.H. Hansen
Título: Distributed parameter modal filtering using smart sensors
Revista: J. Vib. Acoust. Año:1996 Vol.(Num.): 118 Páginas: 630-640
Problema: Diseño de sensores distribuidos Aplicaciones: CAAE 2D de una placa en
soporte simple
Filtro: No Teórico/experimental: Ambos
Sistema comercial: No Otros:
Resumen: Se trata de un trabajo sobre el diseño de sensores de error distribuidos para sistemas
CAAE 2D. Primero se calcula analíticamente la forma de sensores distribuidos 2D para la medida
de los modos radiantes de una estructura, a partir de la forma de los modos radiantes y de los modos
estructurales. Sin embargo, desde un punto de vista práctico, es muy difícil diseñar sensores
distribuidos 2D (por ejemplo, si usamos PVDF habría que variar su espesor, lo cual no es fácil de
hacer). Por esta razón, a continuación se discute como diseñar múltiples sensores distribuidos en
una dirección, válidos para aplicaciones 2D. Para minimizar el número necesario de sensores 1D es
menester distribuirlos en la dirección donde hay más recorrido del índice modal de los modos
estructurales correspondientes (la dirección de la mayor dimensión de la placa). El diseño de estos
sensores es un proceso complicado, donde es necesario determinar previamente el número de modos
estructurales dentro de una determinada banda de frecuencias, el número de modos filtrados por una
determinada función de forma, y calcular la función de forma. Se ilustra este proceso de diseño para
dos casos particulares, ambos en una placa de acero de (88 cm x 180 cm x 9 mm). En el primer
ejemplo se considera una banda de 500 Hz, donde hay 22 modos estructurales, y se requieren 4
sensores distribuidos. En el segundo ejemplo, para una banda de 200 Hz, se calculan explícitamente
los coeficientes de peso para los tres primeros modos radiantes (sólo intervienen 8 modos
estructurales).
Se comparan los resultados numéricos con resultados experimentales. Los sensores distribuidos de
PVDF tienen 7 mm de anchura máxima y 25 µm de espesor. Se diseñan tres sensores distribuidos
para los tres primeros modos radiantes en la banda (0, 200) Hz. El acuerdo teoría-experimento es
bastante bueno.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
66
Autores: R.L. Clark and S.E. Burke
Título: Practical limitations in achieving shaped modal sensors with induced strain materials
Revista: J. Vib. Acoust. Año: 1996 Vol(Num): 118 Páginas:668-675
Problema: Diseño de sensores modales dePVDF
Aplicación: CAV/CAAE en placas ybarras
Teórico/Experimental: Ambos Sistema comercial: No
Extrapolación: No Filtro: No
Resumen: Se analizan las limitaciones en el diseño y realización de sensores modales paraestructuras 1D y 2D. Se demuestra que se pueden conseguir rigurosamente sensores modalessolo para el caso de condiciones de contorno de soporte simple, pues son las únicas para las quese cumple la condición de ortogonalidad entre la función de forma del sensor y las funcionespropias de la estructura, así como entre la función de forma y la curvatura (segunda derivada)de las funciones propias. Para estructuras 1D (barras) en soporte simple, las curvaturas de lasfunciones propias son proporcionales a las funciones propias (sinusoides) por lo que es posibleel diseño de sensores modales. El funcionamiento del sensor es críticamente sensible a suubicación, como se verifica experimentalmente. Para estructuras 2D (placas) en soporte simple,las funciones propias son sinusoides separables, por lo es posible el diseño de sensores modales2D mediante tiras 1D a lo largo de ambos ejes de la placa. De nuevo, el diseño es muy sensiblea errores en la ubicación de los sensores. Se estudia analíticamente esta sensibilidad y severifica experimentalmente. De hecho, la sensibilidad es tanto mayor cuanto mas alto es elorden del modo que se pretende medir. Hay aspectos prácticos en este trabajo que merece lapena destacar. Entre otros:
• Como diseñar un circuito preamplificador para el sensor de PVDF. Se puede diseñar unamplicador de carga o uno de voltaje. Para el caso de un amplificador de carga, se puedeimplementar mediante un circuito con un amplificador de alta impedancia seguido de unamplificador operacional estándar. También se explica como llevar a la práctica el cambiode polaridad mediante cableado (sin necesidad de doblar el PVDF).
• Para evitar ruido eléctrico se conecta la tierra del circuito electrónico a la propia estructura.• Los sensores se pegan con cinta de doble cara adhesiva, y las conexiones eléctricas se hacen
con cinta de cobre. Este es un buen método para sensores de laboratorio. Para un sensorpermanente, habría que usar un pegado más robusto y duradero.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
67
Autores: C. Guigou , A. Berry, F. Charette, and J. Nicolas
Título: Active control of finite beam volume velocity sensor shaped PVDF sensor
Revista: ACUSTICA- Acta
Acustica
Año: 1996 Vol.(Num.): 82 Páginas: 772-783
Problema: CAAE usando un sensor volúmico Aplicaciones: CAAE 1D
Filtro: FX-LMS Teórico/experimental: Ambos
Sistema comercial: Otros:
Resumen: El objetivo de este trabajo es el control de la potencia radiada por una barra, usando un
sensor de PVDF para la velocidad de volumen como sensor de error y un par de cerámicas de PZT
en contrafase como actuador. El artículo plantea primero el problema teórico, a continuación
presenta resultados numéricos, y finalmente contiene resultados experimentales. En la parte teórica
primero se resuelve el problema estructural. Hay que destacar aquí que se planetan condiciones de
contorno genéricas, que son válidas para soporte simple, soporte fijo, o incluso un cantilever. A
continuación se calcula la forma que debe tener un sensor distribuido de PVDF para medir el
desplazamiento de volumen global de la barra. Evidentemente, la forma resultante depende de las
formas de los modos estructurales incluidos, y por tanto, de las condiciones de contorno. El
planteamiento para el cálculo de la forma del sensor es muy similar al caso 2D analizado en otros
artículos de los mismos autores. La dificultad matemática, sin embargo, es menor por tratarse de un
problema 1D. A continuación se presentan resultados numéricos. Hay que resaltar la aparición de un
refuerzo importante de la potencia radiada a algunas frecuencias. Destaca también el hecho de que
la reducción de la potencia radiada es mucho mayor en el caso de un cantilever. Por último, se
presentan resultados experimentales en un cantilever de acero. Se compara el desplazamiento de
volumen medido con el sensor y con vibrometría laser (buen acuerdo, excepto a frecuencias altas).
Para el sistema CAAE se usa un filtro FX-LMS. Se presentan resultados del CAAE en una cámara
semi-anecoica, a varias frecuencias (tabulados) y el diagrama de radiación en polares a la frecuencia
del 4º modo (988 Hz). Se consiguen una atenuación de unos 30 dB.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
68
Autores: D.C. Swanson, C.A. Gentry, S.I. Hayek, and S.D. Sommerfeldt
Título:An error intensity spectral filtering method for active control of broadband structuralintensity
Revista: J.A.S.A. Año: 1997 Vol(Num): 101(1) Páginas: 623-625
Problema: Intensidad vibracional de barrascontroladas activamente
Aplicación: Control Activo de lasVibraciones
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro: Anticipativo
Resumen: Se trata de un trabajo analítico sobre la forma de implementar un sistema paracontrolar activamente la intensidad vibracional de una barra sometida a excitación flexional debanda ancha. Se usan dos actuadores espaciados 10 cm y cinco acelerómetros espaciados 4 cm.Aplicando diferencias finitas, se puede extraer la intensidad flexional en el centro del array deacelerómetros. Esta intensidad es la señal de error para el algoritmo FX-LMS el cual genera lasseñales de control. Las funciones de transferencia actuador-sensor son modeladas usandoecuaciones diferenciales de Euler-Bernouilli de cuarto orden para una barra finita. Estasfunciones de transferencia proporcionan un filtro seudo-intensidad que esencialmente linealizael problema de control de la intensidad. Este filtro puede ser considerado como un filtrovectorial de onda que suprime las ondas estacionarias y las componentes de campo próximo ydeja pasar las ondas propagantes.
En la modelización numérica se consideran varias posiciones para los sensores y actuadores.No se acomete su optimización. Uno no sabe bien por que se han elegido estas posiciones y nootras. Se presentan resultados simulados a frecuencias puras y en banda ancha. A frecuenciaspuras se consiguen atenuaciones de hasta 90 dB. En banda ancha, hay atenuaciones de 20-30 dBen la banda (50 , 500) Hz.
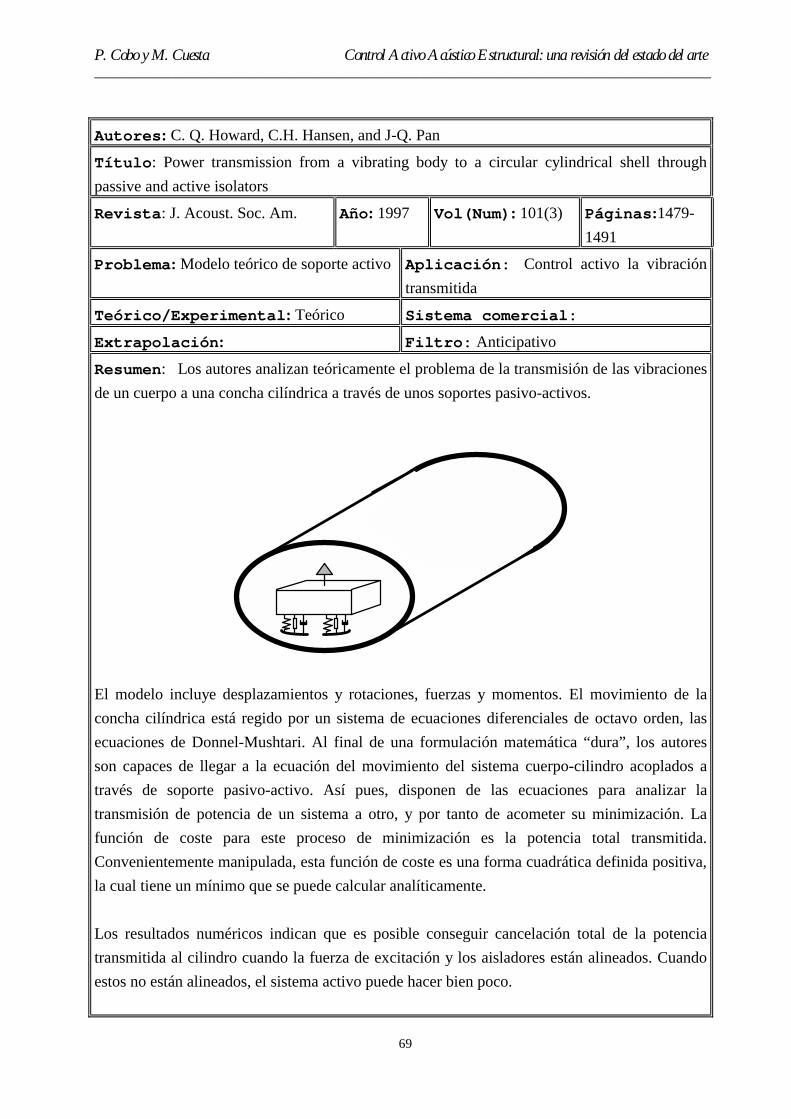
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
69
Autores: C. Q. Howard, C.H. Hansen, and J-Q. Pan
Título: Power transmission from a vibrating body to a circular cylindrical shell throughpassive and active isolators
Revista: J. Acoust. Soc. Am. Año: 1997 Vol(Num): 101(3) Páginas:1479-1491
Problema: Modelo teórico de soporte activo Aplicación: Control activo la vibracióntransmitida
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro: Anticipativo
Resumen: Los autores analizan teóricamente el problema de la transmisión de las vibracionesde un cuerpo a una concha cilíndrica a través de unos soportes pasivo-activos.
El modelo incluye desplazamientos y rotaciones, fuerzas y momentos. El movimiento de laconcha cilíndrica está regido por un sistema de ecuaciones diferenciales de octavo orden, lasecuaciones de Donnel-Mushtari. Al final de una formulación matemática “dura”, los autoresson capaces de llegar a la ecuación del movimiento del sistema cuerpo-cilindro acoplados através de soporte pasivo-activo. Así pues, disponen de las ecuaciones para analizar latransmisión de potencia de un sistema a otro, y por tanto de acometer su minimización. Lafunción de coste para este proceso de minimización es la potencia total transmitida.Convenientemente manipulada, esta función de coste es una forma cuadrática definida positiva,la cual tiene un mínimo que se puede calcular analíticamente.
Los resultados numéricos indican que es posible conseguir cancelación total de la potenciatransmitida al cilindro cuando la fuerza de excitación y los aisladores están alineados. Cuandoestos no están alineados, el sistema activo puede hacer bien poco.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
70
Autores: S. Beyene and R.A. Burdisso
Título:A new hybrid passive/active noise absorption system
Revista: J.A.S.A. Año: 1997 Vol(Num): 101(3) Páginas: 1512-1515
Problema: Siste híbrido de absorciónpasivo/activo
Aplicación: Absorción del sonido
Teórico/Experimental: Ambos Sistema comercial:
Extrapolación: Filtro: Anticipativo
Resumen: Hay trabajos previos sobre el diseño pasivo/activo de absorbentes. En esencia, setrata de poner una lámina vibrante (el diafragma de un altavoz, por ejemplo) a continuación deuna capa de absorbente pasivo, dejando una capa de aire entre ellos. Se puede controlaractivamente la lámina de tal modo que se modifique la impedancia de entrada de la capa dematerial absorbente, variando de este modo su coeficiente de reflexión. En trabajos anteriores,se imponía una condición de liberación de la presión (presión igual a cero) en la capa de aireintermedia entre la capa activa y la pasiva. La novedad de estos autores es que imponen unacondición de adaptación de impedancias (impedancia de la capa intermedia igual a laimpedancia específica característica del aire, ρc). En otras palabras, el sistema de control ha deminimizar la amplitud de la onda reflejada en la capa intermedia. Para medir esta onda reflejadase usa un sistema de dos micrófonos acoplado a un filtro deconvolucionador ideado por Fahy.Para minimizar esta onda reflejada se usa un controlador anticipativo monocanal (FX-LMS)con el altavoz como actuador y la salida correspondiente del filtro deconvolucionador comosensor de error.
El sistema se valida experimentalmente en un tubo de Kundt de 10 cm de diámetro, en unancho de banda de 100 a 2000 Hz. La fuente primaria se sitúa en un extremo, y el altavoz decontrol en el extremo opuesto. A 10 cm del altavoz se pone una capa de 5 cm de espesor deespuma de poliuretano parcialmente reticulada. El sistema de medida de la onda reflejadaconsta de dos micrófonos separados 5 cm, el más próximo de ellos a 1.25 cm de la capaabsorbente. Como señal de referencia se usa la señal eléctrica primaria, y la frecuencia demuestreo es cuatro veces la frecuencia de excitación. Se obtiene un coeficiente de absorciónentre 0.8 y 1 en el margen (100, 2000) Hz.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
71
Autores: C.A. Gentry, C. Guigou, and C.R. Fuller
Título: Smart foam for applications in passive-active noise radiation control
Revista: J. Acoust. Soc. Am. Año: 1997 Vol(Num): 101(4) Páginas:1771-1778
Problema: Sistema híbrido pasivo-activo(PVDF embebido en espuma de poliuretano)
Aplicación: Control del ruido estructural(barcos, aviones, vehículos,..)
Teórico/Experimental: Ambos Sistema comercial: TMS320C30
Extrapolación: No Filtro: Anticipativo
Resumen: Se presenta un sistema híbrido activo-pasivo para el control del ruido de bandaancha, consistente en secciones curvadas cilíndricamente de PVDF (28 µm) embebidas enespuma acústica de poliuretano parcialmente reticulada. El sistema combina la atenuaciónpasiva de la espuma (efectiva a frecuencias altas) con el control activo que proporciona elelemento PVDF cuando se excita con una entrada eléctrica apropiada (efectivo a frecuenciasbajas). El actuador PVDF se comporta linealmente y ha sido diseñado para incrementar sueficiencia de radiación sonora. El mecanismo de cancelación sonora parece ser la modificaciónde la impedancia de radiación de la fuente sobre la que se coloca.
El sistema se monta recubriendo la superficie radiante (coatings) por lo que es altamenterecomendable en control del ruido radiado estructuralmente. Difiere del control CAAE en quemodifica adaptativamente la impedancia acústica de la superficie vibrante sin necesidad demontar fuentes secundarias directamente sobre la estructura. Se presentan resultados delaboratorio usando un pistón de 15 cm de diámetro como fuente. La espuma tiene también 15cm de diámetro y 5 cm de espesor. Se ensaya radiación armónica (290 y 1000 Hz) y aleatoriafiltrada a 1600 Hz. En alta frecuencia, la espuma proporciona una atenuación pasiva de unos 10dB. La cancelación activa global adicional varía entre unos 20 dB, en el caso armónico, y 10-15dB en el caso aleatorio. El algoritmo de control es el FXLMS implementado en una placaTMS320C30 de Texas Instruments. La señal de referencia se saca directamente del generador(experimento de laboratorio). Hay un sólo micrófono de error, aunque se mide la radiación enun semicírculo alrededor de la fuente.
Hay una discusión interesante acerca del montaje del actuador para conseguir mayor eficienciaen la radiación, con menor distorsión armónica. Se analizan configuraciones en paralelo y enserie-paralelo de las diferentes células semicilíndricas de PVDF.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
72
Autores: D.H. Kruger, J.A. Mann III, and T. Wiegandt
Título: Placing constrained layer damping patches using reactive shearing structural intensitymeasurements
Revista: J. Acoust. Soc. Am. Año: 1997 Vol(Num): 101(4) Páginas:2075-2082
Problema: Control pasivo mediante parchescon determinada forma
Aplicación: Lavadoras, frigoríficos,coches
Teórico/Experimental: Experimental Sistema comercial:
Extrapolación: Filtro:
Resumen: Aunque se trata de un trabajo sobre control pasivo, lo incluimos aquí por su interéspara la optimización de sensores y actuadores en CAAE.
Un procedimiento para reducir la radiación estructural de una placa es recubrirla con unmaterial amortiguante. Los autores vienen a demostrar aquí que no es necesario recubrir lasuperficie entera, sino que es posible usar parches con una forma determinada, para conseguirreducciones del SPL radiado de unos 10 dB a frecuencias de 70 y 207 Hz. Para calcular laforma óptima de estos parches se usa el diagrama de la intensidad estructural reactiva decizalla. De hecho, se trata de cubrir las áreas donde esta intensidad tiene un valor máximo parala frecuencia correspondiente a los modos dominantes del sistema.
Esta hipótesis se valida en una cavidad cúbica de 61 cm de lado, una de cuyas superficies (lasuperior) es una lámina de acero de 3.175 mm de espesor sujeta en sus bordes por una barra deacero de 2.54 cm de ancho y 5.08 mm de espesor. Las otras 5 superficies del cubo son rígidas.En la esqina inferior izquierda de la placa, a 21.6 cm del borde, se pone un shaker. El sistema semodela mediante BEM y se calculan los modos 1 y 3 de la cavidad, con frecuencias de 70 y 217Hz, respectivamente. Las medidas de intensidad se hacen mediante vibrometría laser. Lamagnitud medida es la vibración por unidad de fuerza de entrada al shaker. A partir de estasmedidas se calculan las intensidades de flexión, torsión y cizalla usando el método de Pavic.Los parches que se usan son de material viscoelástico 3M Scotchdamp número SJ 2015 tipo1205 constreñido con una capa de aluminio de 0.3 mm de espesor. Se variaba el número, eltamaño y la forma de los parches (cuadrados, rectangulares y arcocirculares). Los mejoresresultados de atenuación (unos 10 dB) se consiguen con los cuatro parches arcocircularescubriendo las áreas de intensidad estructural reactiva de cizalla alta. Para el modo primero, loscuatro parches se cierran formando una corona circular. Para el modo tercero, los cuatroparches forman una estructura simétrica abierta, con la curvatura hacia fuera.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
73
Autores: Z. Li, C. Guigou, C.R. Fuller, and R.A. Burdisso
Título: Design of active structural acoustic control systems using a nonvolumetriceigenproperty asignment approach
Revista: J.A.S.A. Año: 1997 Vol(Num): 101(4) Páginas:2088-2096
Problema: Nueva aproximación al CAAEusando modos no volumétricos
Aplicación: CAAE 1D (barras)
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro: Anticipativo
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
74
Resumen: Es una continuación de trabajos anteriores de Burdisso&Fuller acerca de laimplementación de un sistema CAAE usando el concepto de modos no volumétrcos.Recordemos que los modos radiantes son distribuciones de velocidad superficial que radiansonido al campo lejano independientemente. Pues bien, los modos radiantes son modosvolumétricos, es decir modos para los que la integral a lo largo de la estructura de la velocidadsuperficial es distinta de cero. Los modos no volumétrcos son aquellos para los que la integralanterior es cero. Los modos no volumétricos son radiadores muy pobres. Parece claro que unabuena estrategia CAAE sería actuar sobre los modos estructurales para convertirlos en modosno volumétricos. Este es el objetivo de este artículo. Se exponen los fundamentos teóricos decomo hacerlo. La parte experimental se deja para otro trabajo.
Bajo condiciones de control, la estructura modal (eigenvalores y eigenfunciones) de un sistemacambian. Los autores exponen las relaciones entre los eigenvalores y eigenfunciones de unabarra libremente soportada antes y después de un control anticipativo. En estas relacionesintervienen las señales de control, que son función de las características modales de laestructura no controlada. La teoría se importa de un trabajo previo de Burdisso&Fuller. Laestrategia de control es entonces un simple problema inverso. Conocidas las característicasmodales del sistema antes del control, cuales han de ser las señales de control para que losmodos de la estructura controlada sean no volumétricos. Este problema se resuelve con unafunción de optimización constreñida, CONSTR, de MATLAB. El resultado final de esteproceso son las señales de control y las formas de los sensores de error óptimos. Se ilustra elproceso numéricamente con una barra libremente soportada excitada entre 10 y 3000 Hz. Sepresentan gráficas de la presión radiada en el campo lejano, del diagrama de radiación enpolares, de la potencia acústica total radiada, de la eficiencia de radiación, y de la velocidadcuadrática media. Se obtiene atenuación por debajo de la frecuencia del primer modo de laestructura controlada (304 Hz). Se comparan estos resultados con los que se obtendrían con unsensor de velocidad volúmica y con un acelerómetro. Los de este trabajo son muy superiores alos otros.
Autores: B.L. Scott and S.D Sommerfeldt
Título: Estimating acoustic radiation from a Bernouilli-Euler beam using shaped PVDF
Revista: J.A.S.A. Año: 1997 Vol(Num): 101(6) Páginas: 3475-3485
Problema: Sensores distribuidos de PVDFdiseñados en el dominio del número de onda
Aplicación: CAAE 1D (barras)
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro:
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
75
Resumen: En problemas CAAE se desea determinar la potencia radiada al campo lejanousando sensores de campo próximo. Por tanto, se requieren sensores que sean sensibles a laradiación, y no simplemente a la vibración. Una posibilidad es usar sensores distribuidos conuna forma convenientemente diseñada. También se puede hacer con arrays de sensorespuntuales. La diferencia esencial entre ambos tipos de sensores es que los puntuales requierenun “front-end” adicional donde implementar filtrado espacial, mientras que los distribuidosincorporan el filtrado espacial en el diseño de su forma. Ya hemos revisado muchos artículosque diseñan la forma de los sensores distribuidos en el dominio espacial. La novedad de esteartículo es que describe un procedimiento para el diseño en el domino transformado del númerode onda. El fundamento teórico del diseño en el dominio del número de onda es mucho máselemental que el diseño en el dominio espacial. Puesto que los modos radiantes son aquellospara los que su número de onda es menor que el número de onda acústico (modos supersónicos)se trata de diseñar una función de forma cuya transformada al dominio del número de onda seaun filtro paso bajo, con número de onda de corte igual al número de onda acústico. En estetrabajo se elige una función de forma producto de una ventana de Hamming por una funciónsinc. La tranaformada de Fourier de la función sinc es un filtro paso-bajo. Como es necesariotruncar esta transformada, la transformada de la ventana de Hamming suaviza los efectos deltruncamiento.
Se presentan resultados numéricos sobre una barra encastrada en ambos extremos. Se puedecalcular teóricamente la potencia radiada al campo lejano. Se compara esta solución teórica conla que proporcionaría un array de sensores puntuales y con el array de sensores distribuidosdiseñado según el procedimeineto discutido. Las desviaciones entre los resultados de ambossensores y los teóricos, en la banda entre 20 y 600 Hz, es de –1 a 3 dB para el caso de lossensores distribuidos y de 36-68 dB para el caso de los sensores puntuales.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
76
Autores: C.C. Sung and C.T. Jan
Título: Active control of structurally radiated sound from plates
Revista: J. Acoust. Soc. Am. Año: 1997 Vol(Num): 102(1) Páginas: 370-381
Problema: CAAE en placas Aplicación: Ruido radiado por placas
Teórico/Experimental: Ambos Sistema comercial:
Extrapolación: Filtro: Fijo (no adaptativo)
Resumen: Se comparan los resultados analíticos de un modelo para el CAAE de la radiaciónde placas con los resultados experimentales medidos en una cámara reverberante. La placa estásujeta en sus bordes por un marco de acero y en la parte trasera tiene acoplada una cámaraanecoica (en lugar del bafle infinito, para evitar la radiación hacia atrás). Sobre la placa sesitúan dos actuadores de cerámica doble, uno como actuador primario y otro como actuador decontrol. En el modelo, los actuadores cerámicos se introducen como un par de momentos(fuerzas en dirección contraria separadas una cierta distancia). El controlador que usan no esadaptativo, sino fijo. Es decir, conocidas las posiciones de los actuadores, calculan el voltajeque es necesario introducir al actuador de control para que la presión acústica radiada seamínima. Se presentan resultados experimentales a las frecuencias de los modos 2, 3, 4 y 6 de laplaca (214.45, 319, 389, y 489 Hz, respectivamente). Para el segundo modo reivindican unaatenuación de 23.5 dB, y para el sexto, 10.1 dB.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
77
Autores: C.M. Heatwole, M.A. Franchek, and R.J. Bernhard
Título: Robust feedback control of flow-induced structural radiation of sound
Revista: J. Acoust. Soc. Am. Año: 1997 Vol(Num): 102(2) Páginas: 989-997
Problema: Control realimentado robusto Aplicación: Ruido radiado por la capalímite turbulenta a través de una placa
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro: Realimentado robusto
Resumen: Se presenta aquí un trabajo teórico muy bonito sobre la implementación de unfiltro realimentado robusto para el control radiado por una placa libremente soportada, excitadaen una de sus superficies por un campo acústico similar al que produce una capa límiteturbulenta. El modelo incluye:
• Un modelo para el flujo turbulento, importado de Thomas&Nelson.• Un modelo para la respuesta estructural de la placa (descomposición modal).• Un modelo para la radiación acústica de la placa en el campo lejano (integral de Rayleigh).
El modelo global incluye 50 modos. El sistema de control consiste en un actuador puntual (unshaker) realimentado a un acelerómetro a través de un filtro analógico. El actuador y elacelerómetro están colocados en el centro de la placa, lo que permite el acoplamiento con losmodos impar-impar, los que radian más eficientemente. Como la reducción de la vibración nogarantiza la reducción del sonido, se introduce un filtro de pesos que enfatiza los modosradiantes. El objetivo del controlador es reducir el SPL por debajo de un cierto valor, sujeto auna limitación en el esfuerzo de control. Se consideran incertidumbres del 1% en la frecuenciay del 5% en el amortiguamiento del sistema. El controlador se diseña usando el diagrama deNichols. El diseño incluye curvas en el diagrama de Nichols que limitan el funcionamientorobusto y estable del sistema realimentado. Para un objetivo de control de 56 dB, y un límite deesfuerzo de control de 14 µN, se obtiene finalmente un filtro analógico con tres ceros y cincopolos, que proporciona una cancelación de 16 y 8 dB de los modos primero y tercero de laplaca, respectivamente.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
78
Autores: R.D. Corsaro, B. Houston, and J.A. Bucaro
Título: Sensor-actuator tile for underwater surface impedance control studies
Revista: J. Acoust. Soc. Am. Año: 1997 Vol(Num): 102(3) Páginas:1573-1581
Problema: Materiales anecoicos parasubmarinos
Aplicación: Control activo de lareflexión en submarinos
Teórico/Experimental: Ambos Sistema comercial:
Extrapolación: Filtro: Realimentación
Resumen: Los autores describen el concepto de “Smart Tiles”, una especie de azulejosactivos para controlar la reflexión y transmisión en submarinos. Estos azulejos consisten en unsandwich de tres capas (más las correspondientes capas para recubrimiento, desacoplo,encapsulamiento,.). Las tres capas activas son un sensor de velocidad, un sensor de presión y unactuador. El sensor de velocidad se construye con un array de cuatro acelerómetros comerciales,más un módulo electrónico para acondicionar y sumar las señales de cada uno de estos. Elsensor de presión (capa hidrofónica) consiste en una lámina Piezorubber PR-307 de NTK Corp,con una sensibilidad de -190 dB re 1V/µPa. El material del actuador es un composite 1-3 deMSI. Su TVR (Respuesta en Voltaje Transmitido) crece con la frecuencia, desde unos 100 dBre 1 µPa/V a 1 m, a 1 kH, hasta unos 120 dB re 1 µPa/V a 1 m, a 4 kHz. Los autores describencon detalle las características transductoras de cada una de estas capas, así como suacoplamiento mútuo.
En cuanto a la estrategia de control, se trata de hacer que la impedancia del material sea muypróxima a la impedancia del agua, para cada frecuencia. Nótese que en este caso, el coeficientede reflexión en incidencia normal sería cero. Los autores observan que la función dedirectividad de un azulejo de estos coincide con la del actuador, siempre que sus áreas sean lamisma, como es el caso, y siempre que sus dimensiones sean menores que media longitud deonda en el agua. Entonces, es posible ensombrecer (shading) el actuador para que la reflexióncero en incidencia normal garantice también reflexión cero en todas las direcciones.
Se presentan resultados experimentales prometedores. Se consiguen coeficientes de reflexiónentre -30 dB, a 500 Hz, y -10 dB, a 5 kHz, en buena consonancia con los resultados predichos.A 2750 Hz, los resultados experimentales son aún mejores que los que permite predecir elmodelo teórico elaborado. No hay en el trabajo una explicación de este hecho.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
79
Autores: P. Masson, A. Berry, and J. Nicolas
Título: Active structural acoustic control using strain sensing
Revista: J.A.S.A. Año:1997 Vol.(Num.): 102(3) Páginas: 1588-1599
Problema: CAAE con sensores de deformaciones
(fibra óptica)
Aplicaciones: CAAE 2D de una placa en
soporte simple
Filtro: Control óptimo Teórico/experimental: Teórico
Sistema comercial: No Otros:
Resumen: Este trabajo presenta una nueva estrategia CAAE que involucra la medida del campo de
deformaciones de la estructura como señales de error. Este campo de deformaciones puede medirse
con sensores de fibra óptica, por ejemplo, que pueden ser integrados dentro de la estructura
(estructuras inteligentes). Mientras que los sensores de PVDF sufren de ambigüedad en estructuras
2D, según los autores, el uso de sensores discretos de fibra óptica permite discriminar las
componentes de la deformación, lo que da lugar a un CAAE más apropiado. El CAAE se plantea en
el dominio transformado (kx, ky) y la función de coste a minimizar es la potencia acústica radiada.
Se presentan dos aproximaciones para la medida del campo de deformaciones:
• La aproximación por diferencias finitas, basada en la reconstrucción del campo de
desplazamientos a partir del campo de deformaciones.
• La aproximación directa, basada en la integración por partes del campo de desplazamientos en el
dominio (kx, ky).
Para validar ambas aproximaciones se comparan con la solución analítica para el caso de una placa
delgada en soporte simple. Se obtiene una buena aproximación en ambos casos con tal de que se
usen al menos dos sensores por longitud de onda estructural. La aproximación por diferencias finitas
funciona mejor en toda la banda de frecuencias, aunque la aproximación directa puede funcionar
bien en baja frecuencia. Se simulan numéricamente resultados de control óptimo usando actuadores
PZT. A modo de ejemplo, se obtiene atenuación considerable usando un array de 16x16 sensores y
cuatro actuadores.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
80
Autores: M.J. Brennan, S.J. Elliott and R.J. Pinnington
Título: The dynamic coupling between piezoceramic actuators and a beam
Revista: J.A.S.A. Año: 1997 Vol(Num): 102(4) Páginas: 1931-1942
Problema: Modelo dinámico de actuadores yestructuras acoplados
Aplicación: CAAE 1D (barra)
Teórico/Experimental: Ambos Sistema comercial:
Extrapolación: Filtro:
Resumen: Se presenta un modelo ondulatorio para investigar el acoplamiento dinámico entreun actuador simple o doble y una barra. El actuador y la barra son separados en partes activa ypasiva, las cuales se modelan separadamente, y después se conectan mediante condiciones decontorno adecuadas. La ventaja de este modelo es su simplicidad, ya que solo requiere lamodelización del comportamiento en la vecindad del actuador. El modelo desarrollado permiteincluir las características pasivas del actuador (su masa y su rigidez). También permite analizarseparadamente las ondas longitudinales y de flexión generadas en la barra. Un actuador doble(dos cerámicas, una por encima y otra por debajo de la barra) permite generar separadamenteondas longitudinales (excitación en fase) o flexionales (excitación en contrafase). Un actuadorsimple (una sóla cerámica) dará lugar a ondas longitudinales y flexionales acopladas. El análisisdemuestra que la rigidez y la masa tienen muy poco efecto en las ondas longitudinales y en lasondas flexionales en baja frecuencia y con cerámicas finas. En alta frecuencia y con cerámicasgruesas relativas al espesor de la barra, es necesario incluir los efectos pasivos. Se demuestratambién que para un voltaje dado, un actuador genera más potencia flexional que longitudinalen baja frecuencia. Cuando la longitud del actuador es mayor que 4/5 la longitud de ondaflexional, se invierte esta tendencia (se genera más potencia longitudinal que flexional). Lalongitud óptima del actuador es media longitud de onda. Como las velocidades de propagaciónlongitudinal y flexional son distintas, es claro que no se puede construir un actuador óptimopara controlar ambos tipos de onda. Habrá que llegar a un compromiso.
Se presentan resultados experimentales que validan el modelo desarrollado. Como el modeloconsidera una barra infinita, es necesario incluir terminaciones anecoicas en los extremos, tantopara las ondas longitudinales como para las flexionales. Se describe con detalle como se hace.
En resumen, para este tipo de actuador, el tipo y amplitud de ondas generadas dependerá de lafrecuencia, de la longitud del actuador, de su espesor y del espesor de la barra.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
81
Autores: T. van den Dool, N. Doelman, S. Häusler, and H. Baier
Título: Broadband MIMO ANC in an Ariane fairing model
Revista: ACTIVE 97 Año: 1997 Vol(Num): Pág: 861-872
Problema: Ruido banda ancha Aplicación: CAR, CAAE en cohetes
Teórico/Experimental: Experimental Sistema comercial: No
Extrapolación: No Filtro: FIR
Resumen: El objetivo de este trabajo es estudiar la viabilidad de un sistema de control activo enun cohete de características similares al Ariane 5. Se diseña una lanzadera espacial en formacilíndrica en la que se estudia control estructural y acústico, así como las estrategias feedforwardy feedback.
El ruido del cohete es random y se propaga por el aire, aunque las bajas frecuencias también lohacen vía estructural. Alcanza niveles de 140 dB en el primer minuto de lanzamiento. Lareducción de frecuencias altas se hace con métodos pasivos que aumentan un 20% el peso delsistema. Para llevar a cabo el control activo (CAR o ASAC) se necesitaran:
! Micrófonos o acelerómetros para detectar el campo! Actuadores o altavoces como fuentes secundarias! Sensores de vibraciones (en la estructura) o sensores de error en el interior
El análisis modal refleja que el campo en el interior está dominado por los modos normales de lacavidad y que el acoplo vibro-acústico es muy bajo. Esto implica que para controlar lasvibraciones será necesario utilizar más actuadores y sensores y por consiguiente un hardwaremás potente. En una sección del cilindro construido, se prueba control acústico. El ruido delcohete es simulado por un altavoz externo. El controlador consiste en un sistema modular VMEcon procesador Digital Alpha, en el que se implementan filtros FIR. La señal de referencia laproporciona un sensor interior (es caso feedback a pesar de incorporar una referencia), senecesitan también 6 altavoces situados en el suelo y 11 sensores de error situados a 12 cm de lapared interna y suficientemente lejos las fuentes secundarias. El resultado obtenido es similar alde la simulación previa, reduciéndose el nivel global en 2.1 dB. En el caso feedforward, la señalde referencia procede directamente de la fuente primaria y el resultado obtenido es mejor (6.3dB reducidos). Sin embargo el ruido primario en el lanzamiento es random espacialmente por loque no puede aplicarse control feedforward, ya que es imposible predecir el campo. El controlfeedback por su parte puede reducir suficientemente el nivel de ruido con un número adecuadode sensores de referencia.
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
82
Autores: St. Pierre, R.L., Koopmann, G.H., and Chen, W.
Título: Volume velocity control of sound transmission through composite panels
Revista: Applied Acoustics Año: 1998 Vol(Num): 210(4) Páginas: 441-460
Problema: CAAE mediante control de lavelocidad de volumen
Aplicación: Ruido global en el interiorde aeronaves
Teórico/Experimental: Ambos Sistema comercial: SpectrumMDC40S, basado en un TMS320C40 de TI
Extrapolación: Filtro: FX-LMS
Resumen: Se trata de una continuación del trabajo anterior de Naghshineh y Mason en 1996sobre el control de la velocidad de volumen de una fuente de ruido estructural. En aquel trabajo,los citados autores usaban un acelerómetro para medir la velocidad de volumen del panel, unaltavoz para generar la velocidad de volumen secundaria, y filtro analógico que implementabaesencialmente la inversa de la función de transferencia del altavoz. Este trabajo extiende elsistema para un control adaptativo. Se trata también de unidades de control independientes (noes multicanal). Cada unidad de control independiente consta de un acelerómetro para medir lavelocidad de volumen del panel, un acelerómetro para medir la velocidad de volumen del conodel altavoz, y un altavoz para generar la velocidad de volumen secundaria. La señal deacelerómtero en el panel es la señal de referencia para un filtro adaptativo FX-LMS. La señal deerror es una combinación de las señales de ambos acelerómetros. El margen de frecuencias decontrol de este sistema es kL≤ 3, siendo L es la dimensión característica de cada segmento decontrol.
Para validar experimentalmente el sistema se construye una unidad de control con cuatrosegmentos, fabricada por PCB Piezotronics. Los altavoces son del tipo Soundtech CX2 de 240W. El algoritmo FXLMS se implementa en una Spectrum MDC40S, basada en un DSPTMS320C40 de TI. Los ensayos se realizaron primero excitando el panel con un tono puro de230 Hz. Se consiguieron reducciones de unos 22 dB en las bandas de 1/3 de octava de 200 y250 Hz. En un segundo experimento se excitó el panel con una señal de barrido rápido enfrecuencia en la banda (200 , 260) Hz. La reducción conseguida en este caso fue de unos 9 dBen las bandas de 1/3 de octava de 200 y 250 Hz, pero a costa de un incremento notable en lasbandas adyacentes. En definitiva, el trabajo demuestra la viabilidad de reducir globalmente elruido de baja frecuencia, de origen estructural, en el interior de aviones y helicópteros. Tambiénse podría usar en transformadores eléctricos y en otro tipo de maquinaria pesada.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
83
Autores: F. Charette, A. Berry, and C. Guigou
Título: Active control of sound radiation from a plate using a polyvinylidene fluoride volume
displacement sensor
Revista: J.A.S.A. Año: 1998 Vol.(Num.): 103(3) Páginas: 1493-1503
Problema: CAAE usando un sensor volúmico Aplicaciones: CAAE 2D de una placa sujeta
por los extremos
Filtro: Anticipativo Teórico/experimental: Ambos
Sistema comercial: Otros:
Resumen: Este trabajo está inspirado en los trabajos previos de Elliott&Jonson sobre sensores de
la velocidad volúmica como señales de error para sistemas CAAE. La idea está basada en la forma
de los modos radiantes. En baja frecuencia, el modo radiante más eficiente es el primero, el cual
resulta ser un modo tipo pistón. Por consiguiente, un sensor capaz de medir la velocidad volúmica
de la estructura es la manera más eficaz de diseñar un sistema CAAE SISO con gran capacidad de
atenuación en baja frecuencia. Las novedades más importantes que aporta este trabajo son:
• La función de coste del sistema de control es el desplazamiento de volumen estructural.
• El sensor distribuido diseñado no ha de cubrir toda la estructura, como en el caso del diseño de
Elliott&Jonson, sino que consiste en una cruz de dos tiras de PVDF de máxima anchura de 1 cm,
con una forma especialmente diseñada. De hecho, gran parte del artículo consiste en el cálculo de
esta forma.
• Para el diseño de la forma del sensor distribuido se parte de medidas estructurales
experimentales. Por tanto, el método de diseño es válido para cualesquiera condiciones de
contorno. En este trabajo, se mide el desplazamiento estructural con un sistema de vibrometría
laser. Estas medidas se usan, junto con un paquete StarModal, para calcular las funciones propias
de la estructura.
• La forma de los sensores distribuidos es independiente de la frecuencia.
Se presentan resultados experimentales del CAAE en una placa de aluminio de (50 cm x 39.8 cm x
3.15 mm), usando cerámicas piezoeléctricas de (3.81 cm x 3.18 cm x 0.19 mm) como fuentes
primaria y secundaria, los sensores distribuidos diseñados, construidos con PVDF de 28 µm, como
sensores de error, y un filtro anticipativo FX-LMS. Se consiguen atenuaciones de la presión sonora
radiada de 16, 40, y 14 dB a las frecuencias de 125 (frecuencia forzada), 140 [(modo (1,1)], y 320
Hz [modo (1,2)], respectivamente.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
84
Autores: N. Tanaka, Y. Kikushima and N.J. Fergusson
Título: One-dimensional distributed modal sensors and the active modal control for planar
structures
Revista: J. A.S.A. Año:1998 Vol.(Num.): 104(1) Páginas: 217-225
Problema: Diseño de sensores distribuidos Aplicaciones: CAAE 2D de una placa en
soporte simple
Filtro: Realimentación Teórico/experimental: Ambos
Sistema comercial: No Otros:
Resumen: Se trata de la continuación del trabajo de Tanaka et al (1996) sobre el diseño de sensores
de error distribuidos. Allí se describía una metodología para el diseño de sensores distribuidos de
modos radiantes. Aquí se describe una metodología similar para la medida de modos estructurales
con sensores de PVDF. Primero se da un repaso a la teoría del diseño de filtros modales con
sensores puntuales. Después de analizar sus inconvenientes (el más importante, el excesivo número
de sensores requeridos) se introducen los fundamentos del diseño de los sensores distribuidos 2D.
Desde un punto de vista práctico, estos sensores 2D son muy difíciles de implementar en PVDF,
debido a su extremada delgadez. El problema se soslaya diseñando sensores 1D, en la dirección de
máxima variación del índice modal (máxima dimensión de la placa). Lo más importante, la forma
de estos sensores distribuidos que seleccionan modos determinados, se describe de manera clara. De
hecho, la forma del sensor distribuido para medir el modo n-ésimo es una reproducción del propio
modo n-ésimo. Esta afirmación es válida para todas las condiciones de contorno “clásicas”, es decir,
soporte simple, soporte rígido, contornos libres, y contornos deslizantes.
Se valida experimentalmente el método diseñando sensores para los modos (1,3) y (1,4) de una
placa de acero de (180 cm x 88 cm x 9 mm), en soporte simple. El modo (1,4) está muy próximo (a
4 Hz) al modo (2,2), por lo que se puede considerar un modo casi degenerado. La selectividad de los
sensores diseñados es excelente. Se presentan resultados del CAAE realimentado usando shakers
como fuentes primaria y secundaria, y sensores distribuidos como señales de error.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
85
Autores: B.S. Cazzolato and C.H. Hansen
Título: Active control of sound transmission using structural error sensing
Revista: J. Acoust. Soc. Am. Año: 1998 Vol(Num): 104(5) Páginas:2878-2889
Problema: Modos radiantes y CAAE Aplicación: CAAE en cilindros
Teórico/Experimental: Teórico Sistema comercial:
Extrapolación: Filtro: Anticipativo
Resumen: El CAAE es un problema acústico-estructural acoplado. Se trata de reducir lavibración estructural de un sistema para reducir el ruido radiado o transmitido por esta a unespacio interior. La formulación clásica consiste en calcular el campo acústico en el recinto (porejemplo, calcular la presión acústica mediante modos normales), calcular el campo estructuralen la estructura (por ejemplo la velocidad de vibración mediante modos normales), y acoplarlosen la interfaz entre ambos sistemas (por ejemplo, continuidad de la velocidad). Esto permiteobtener una función de coste acústica (por ejemplo, la energía potencial acústica) en función de
una variable estructural. Sea esta función Ep H= ∏v v. El problema es que la matriz ΠΠΠΠ no
es diagonal. Es decir, los modos estructurales no son ortogonales a la energía potencial acústica,por lo que el control de las velocidades estructurales no implica necesariamente la reducción dela energía potencial acústica. Los autores desarrollan una teoría que permite reducir el campoacústico controlando lo modos estructurales ortogonales a la energía potencial acústica,denominados modos radiantes. Para ello descomponen la matriz ΠΠΠΠ en sus valores singulares
(∏ = USUT ), donde U es la matriz de vectores propios y S es la matriz de valores propios.
La energía potencial acústica es ahora Ep H T H= =v USU v w Sw . Como la matriz Ssi es diagonal, la reducción de las amplitudes de los modos radiantes, w, si reducirá la energíapotencial acústica. Los autores demuestran que en el caso de un cilindro, donde se requieren delorden de 200 modos estructurales para conseguir una reducción considerable de la Ep, solo senecesitan 5 modos radiantes para conseguir la misma cancelación. Así pues, la consideración delos modos radiantes reduce la dimensionalidad del sistema, y por tanto, el orden del sistema decontrol. Los modos radiantes se calculan a partir de las señales de error proporcionadas porsensores discretos (acelerómetros, por ejemplo) o distribuidos (PVDF, por ejemplo). Latransformación de los modos estructurales a modos radiantes se denomina filtrado modal. Elproblema de este planteamiento es que las formas modales de los modos radiantes dependen dela frecuencia. Los autores resuelven este problema considerando las formas modales constantesa una frecuencia representativa. Se realiza una modelización numérica del problema por mediode elementos finitos (ANSYS).

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
86
Autores: J.P. Smith, B.D. Johnson, and R.A. Burdisso
Título: A broadband passive-active sound absorption system
Revista: J.A.S.A. Año: 1999 Vol(Num): 106(5) Páginas: 2646-2652
Problema: Adaptación de impedanciasactiva
Aplicación: Absorción de banda anchapasiva/activa
Teórico/Experimental: Experimental Sistema comercial: TMS320 C30
Extrapolación: Filtro: Anticipativo
Resumen: En un trabajo previo de Beyene y Burdisso (JASA, 101, 1977) incluido en estarevisión, se demostraba la viabilidad de construir sistemas híbridos pasivo-activos. Se trata desistemas multicapa, que incluyen una primera capa de material absorbente pasivo, una capa deaire y una capa activa. En la capa de aire intermedia se incluyen uno o varios micrófonos paraproporcionar la señal de error al controlador. Si se minimiza la presión acústica proporcionadapor un solo micrófono en la capa de aire, se obtiene un controlador basado en la condición librede presión. Si se minimiza la señal proporcionada por dos micrófonos en la capa de aire,conectados a través de un filtro deconvolucionador, se obtiene un controlador basado en lacondición de adaptación de impedancias. Beyene y Burdisso demostraban que esta condiciónequivalía a adaptar la impedancia de entrada del sistema multicapa a la impedancia del aire.
En este trabajo se presentan resultados experimentales que demuestran que el controlador poradaptación de impedancia es superior al de liberación de la presión. Los experimentos se llevana cabo en un tubo de ondas estacionarias de 10 cm de diámetro y 120 cm de longitud. En unextremo se genera una señal aleatoria filtrada en la banda de paso de 1600 Hz. En el otroextremo se sitúa el sistema pasivo activo, siendo la pared activa el diafragma de un altavoz. Elespesor del absorbente pasivo y el de la cámara de aire son variables. Para comparar ambosmétodos de control se miden el coeficiente de absorción en la banda (100, 1000 Hz) y elesfuerzo de control. Los resultados del sistema de control por adaptación de impedanciasproporciona mayor absorción con la mitad de esfuerzo de control, aproximadamente. En amboscasos, la variación de los espesores del material pasivo y de la cámara de aire tiene un efectoimportante en el coeficiente de absorción (sobre todo en el ancho de banda controlado).
Como resumen, se obtienen coeficientes de absorción entre 0.8 y 1 en una banda entre 100 y1000 Hz.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
87
Autores: C. Guigou and C.R. Fuller
Título: Control of aircraft interior broadband noise with foam-PVDF smart skin
Revista: J.S.V. Año: 1999 Vol(Num): 220(3) Páginas:541-557
Problema: CAAE usando espumas activas Aplicación: CAAE en aviones
Teórico/Experimental: Experimental Sistema comercial: TI TMS320C40
Extrapolación: Filtro: Anticipativo
Resumen: Se trata de un trabajo muy interesante desde el punto de vista experimental. Sepresentan los resultados del CAAE del ruido en la cabina de un avión tipo jet comercial CesnaCitation III. Los experimentos se hacen en condiciones de laboratorio, haciendo radiar elfuselaje mediante un altavoz en el exterior excitado con una señal aleatoria de banda limitada.Se usa PVDF curvado cilíndricamente embebido en espuma de poliuretano parcialmentereticulado como elemento de control pasivo-activo. La atenuación pasiva en la banda (250,1250) Hz es de 4 dB. La curvatura del PVDF es para convertir la deformación en la direcciónlongitudinal a vibraciones en la dirección perpendicular. El controlador es anticipativoimplementado en un C40 de TI. Se usa un filtro FIR con 90 y 100 coeficientes para las vías deerror y de control, respectivamente. Se analiza la influencia en el control del orden del sistemamulticanal, de la posición de los sensores de error, del tipo de señal de referencia, y del anchode banda de la señal aleatoria. Los resultados indican:
• La atenuación global es de 2.5 dB para un sistema 2I/2O y de 8 dB para el caso 4I/4O. Elancho de banda es de 800 Hz, y la señal de referencia es la del generador. Se concluye que laatenuación se incrementa con el orden del controlador.
• En cuanto a la posición de los micrófonos de error, se obtiene una mayor cancelación cuandoestos están a siete pulgadas de los actuadores que cuando están a 3 pulgadas.
• Se comparan los resultados de una referencia eléctrica (el generador de señal), unaestructural (un acelerómetro en el exterior del fuselaje) y una acústica (un micrófono en elexterior del fuselaje). Los resultados con el acelerómetro son mucho peores que con elmicrófono. Se comprueba que la pérdida de funcionamiento con el acelerómetro no esdebida a pérdida de coherencia, sino a problemas de causalidad (el retardo acústico en elcaso del acelerómetro es menor que el retardo del controlador).
• La cancelación global con el micrófono como referencia es de 10 dB para un ancho de bandade 200 Hz, de 9 dB para un ancho de banda de 400 Hz, y de 7 dB para un ancho de banda de800 Hz. Como cabe esperar, la degradación del funcionamiento con el acelerómetro es aúnpeor, debido a los problemas de causalidad.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
88
Autores: S.D. Snyder
Título: Microprocessors for active control: Bigger is not always enough
Revista: ACTIVE 99 Año: 1999 Vol(Num): Páginas: 45-62
Problema: Implementación en DSP Aplicación: Todas las CAR/CAAE
Teórico/Experimental: Tutorial Sistema comercial:
Extrapolación: Filtro: Anticipativo
Resumen: Se trata de un trabajo de divulgación presentado como conferencia invitada en elcongreso ACTIVE 99. Se discuten los fundamentos de funcionamiento de sistemasCAR/CAAE, sobre todo su implementación en un DSP. La idea es que el µP más potente nopuede soslayae las limitaciones impuestas por el sistema físico. El sistema físico (ubicación ycalidad de los actuadores, ubicación y calidad de los sensores, y calidad de la señal dereferencia) determina la máxima atenuación que se puede conseguir con un sistemaCAR/CAAE. El grado de aproximación a esta máxima cancelación teórica depende de lacalidad del controlador). Se dan una serie de consejos para optimizar el controlador:
• Programar en ensamblador: Una rutina programada en C necesita entre 5 y 10 veces másciclos de reloj que una programada en ensamblador.
• Relentizar la adaptación: Adaptar el algoritmo de control cada dos o tres muestras, mejorque cada muestra. Esto permite usar un coeficiente de convergencia más alto, y alcanzarmayor atenuación, sin riesgo de inestabilidad.
• Usar la identificación extendida: Cuando hay tonos presentes en el ruido de fondo, lamedida de la función de transferencia mejora cuando se usa el método de la identificaciónextendida.
• Incluir fugas en la adaptación: Los errores de truncamiento y cuantización pueden hacerconverger el algoritmo hacia una solución lejana de la óptima si no se permite una ciertafuga de los coeficientes del filtro (uno o dos bits).
• Evitar las divisiones a toda costa: Hay dos opciones para implementar las divisiones; asaber, multiplicar por el inverso o la técnica del desplazamiento del bit.
• Minimizar el número de señales de error: Cuantas más señales de error, mayor es el númerode operaciones involucradas en cada paso de actualización.
• Muestrear a la velocidad correcta: Una buena elección es muestrear a unas 10 veces lafrecuencia de la señal a cancelar. El margen aconsejado es entre 3 veces y 50 veces (paraDSP en coma flotante) la frecuencia de la señal a cancelar.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
89
Autores: A. Berry
Título: Advanced sensing strategies for the active control of vibration and structural radiation
Revista: ACTIVE 99 Año:1999 Vol.(Num.): Páginas: 73-90
Problema: Sensores para CAR, CAV y CAAE Aplicaciones: CAR/CAAE/CAV de una barra
y de una placa
Filtro: Anticipativo Teórico/experimental: Ambos
Sistema comercial: Otros:
Resumen: Se trata de otro trabajo sobre el uso de sensores para el CAV/CAAE de una placa y de
una barra. Esto incluye sensores para la intensidad estructural en el CAV de una barra, sensores para
la intensidad acústica de campo próximo en el CAR de la radiación de superficies extensas, y
sensores de la velocidad de volumen estructural en CAAE.
En lo que concierne al CAAE, la potencia sonora radiada es directamente proporcional al cuadrado
del desplazamiento de volumen en bajas frecuencias, por lo que la minimización del mismo
conducirá a una reducción de la potencia radiada. Además, se puede demostrar que la minimización
del desplazamiento de volumen en la dirección del eje acústico de la placa (θ=0) es equivalente al
CAAE con un micrófono en el campo lejano en dicho eje. La minimización del desplazamiento de
volumen es especialmente efectiva en el control de la transmisión sonora a través de paneles, ya
que, en este caso, una onda plana incidente excita predominantemente los modos simétricos,
volumétricos, de la placa.
Los principios teóricos se ilustran con resultados experimentales publicados previamente en otros
artículos. En el caso del CAAE de una placa, se presentan los resultados de Charette et al. (1998)
revisados previamente.
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
90
Autores: A.P. Berkhoff and N.J. Doelman
Título: Efficient radiation mode sensing strategies for active structural acoustic control
Revista: ACTIVE 99 Año:1999 Vol.(Num.): Páginas:
Problema: CAAE usando micrófonos en el campo
próximo
Aplicaciones: CAAE 2D de una placa
Filtro: Anticipativo Teórico/experimental: Ambos
Sistema comercial: Otros:
Resumen: Se trata de otro trabajo sobre el uso de sensores de modos radiantes como señales de
error de sistemas CAAE. Hemos visto que existen dos aproximaciones al diseño de sensores de los
modos radiantes:
• Usar sensores puntuales, generalmente acelerómetros, pasados a través de filtros espaciales
modales.
• Usar sensores distribuidos, especialmente diseñados, pasados a través de filtros frecuenciales de
ponderación.
Este trabajo trata del diseño de sensores de los modos radiantes, usando sensores puntuales. La
novedad es que, además de discutir el uso de sensores estructurales (acelerómetros) discute también
el uso de sensores acústicos (micrófonos) situados en el campo próximo de la placa. Recuérdese que
la potencia acústica radiada es el producto de velocidades estructurales por presiones acústicas de
campo próximo. En general, se pone la presión acústica en función de la velocidad estructural, a
través de la matriz de transferencia de impedancia. Pero también se puede poner la velocidad
estructural en función de la presión acústica, a través de la matriz de transferencia de admitancia.
Esto es lo que analizan los autores. Desde el punto de vista práctico, se discuten el espaciado
mínimo entre micrófonos, el número mínimo de sensores de modos radiantes, y el número de
actuadores necesario para un sistema CAAE en una banda de frecuencias determinada. Se presentan
resultados experimentales sobre una placa delgada de (60 cm x 75 cm x 6 mm) excitada con un
altavoz. Se disponen 20 micrófonos, espaciados 15 cm. Se consiguen atenuaciones en la banda (50,
250) Hz de 16.2 y 22.9 dB, con un modo radiante-un actuador y tres modos radiantes-tres
actuadores, respectivamente.
P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
91
Autores: N. Rizet, M. Brissaud, P. Gonnard, J.C. Béra, and M. Sunyach
Título: Modal control of beam flexural vibration
Revista: J.A.S.A. Año:2000 Vol.(Num.): 107 Páginas: 2061-2067
Problema: CAV usando filtrado modal Aplicaciones: CAV 1D de una barra
Filtro: LQR Teórico/experimental: Ambos
Sistema comercial: ADSP2101 Otros:
Resumen: Se trata de un trabajo sobre control activo de las vibraciones de una barra en soporte
simple. Hay algunas cosas interesantes en este artículo:
• Plantea el problema en el espacio de estados en tiempo discreto. Esta formulación se presta
mejor a un control LQR (regulador cuadrático lineal).
• Usa cerámicas PZT de (20 cm x 10 cm x 1 mm), como sensores y como actuadores. La única
diferencia es que en el caso de actuadores, se usan cerámicas dobles en contrafase.
• Se intentan controlar los primeros 2-5 modos, en una banda hasta 450 Hz. Para medir estos
modos se implementa un filtrado modal clásico. Es decir, se plantea en forma matricial la
ecuación para el desarrollo modal de la variable estructural (desplazamiento, velocidad,..) y se
invierte esta ecuación matricial para obtener las amplitudes modales a partir de las salidas de los
sensores. Para cuatro modos se requieren como mínimo cuatro sensores.
• Usa una excitación aleatoria filtrada en la banda que se va a controlar (30, 450) Hz.
Se presentan los resultados experimentales sobre una barra de acero de (60 cm x 4.1 cm x 2.7 mm).
El sistema de control se implementa sobre una placa ADSP 2101 de Analog Devices. Para los
sensores se usan unos preamplificadores de carga de desarrollo propio. Para los actuadores se usan
amplificadores Trek 50/750. Se consiguen atenuaciones de 10, 20, 12, y 12 dB, para los modos
segundo, tercero, cuarto, y quinto, respectivamente.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
92
Tabla1. Distribución por años.
AÑO NUMERO AÑO NUMERO1988 3 19891990 5 1991 111992 13 1993 51994 7 1995 81996 11 1997 131998 4 1999 52000 1 TOTAL 86
Tabla 2. Procedencia de los artículos revisados
Procedencia Numero trabajosNOISE-CON 7Journal of Vibration and Acoustics 5Journal of Sound and Vibration 7Journal of the Acoustical Society of America 46Noise Control Engineering Journal 3Applied Acoustics 2ACTIVE 95, 97 y 99 9ACUSTICA-acta acustica 1Proc. UDT 2Otros 4
TOTAL 84
Las Tablas 1 y 2 presentan la distribución de los trabajos revisados por años y por revistas deprocedencia, respectivamente. Destaca, con mucha diferencia, el Journal of the AcousticalSociety of America, una garantía de la calidad de los trabajos publicados. Como podemos ver enla Tabla 3, los temas tratados son muy variados. Gran parte de los resultados experimentales sepresentan en sistemas muy sencillos, como placas y barras en soporte simple, debido a que enestos casos se conoce la solución analítica, lo que permite la comparación teórica/experimental.Una línea de investigación muy importante es el diseño de sensores para CAAE. Se pueden usarsensores puntuales estructurales (acelerómetros) o acústicos (micrófonos) en el campo próximode la estructura que vibra. Esta estrategia, sin embargo tiene dos problemas:
• Una estructura relativamente simple contiene un gran número de modos estructurales. Portanto, se requiere un gran número de sensores, y el controlador necesario debe tener un grannúmero de entradas.

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
93
• La reducción de la vibración estructural no implica necesariamente la reducción de lapotencia acústica radiada en toda la banda de control.
La teoría de modos radiantes resuelve este problema. Los modos radiantes son combinaciones demodos estructurales que tienen la propiedad de ser ortogonales. Además, el primero modoradiante, modo volumétrico, o modo pistón, es el responsable de la radiación de gran parte de lapotencia en baja frecuencia. Por consiguiente, con un sistema CAAE con un solo sensor para elprimer modo radiante se podría cancelar gran parte de la potencia radiada en baja frecuencia. Unalínea de investigación muy importante es precisamente el diseño de sensores distribuidos para losmodos radiantes.
Tabla 3. Distribución de artículos sobre CAAE por temas
Tema Numero de trabajosCAAE 1D (barras) 13CAAE 2D (placas) 17CAAE 3D (cilindros) 2CAV 9Mecanismos de control 4Sensores y actuadores para CAAE. Su optimización 12Modos radiantes 10Control de la velocidad de volumen 6Diseño de sensores distribuidos 17Algoritmos (Realimentacion, anticipacion,..) 5CAAE en medios de transporte (vehículos, trenes y aviones) 9Aplicaciones industriales 2CAAE en acustica submarina 5CAAE del ruido transmitido 5CAAE en sistemas aeroespaciales 3Soportes activos 1Absorbentes/amortiguantes híbridos pasivo-activos 6CAAE del ruido de la capa límite turbulenta 1
AGRADECIMIENTOS
Este trabajo ha sido posible gracias a la financiación de la CICYT, a través
del Proyecto AMB99-1095-C02-01

P. Cobo y M. Cuesta Control Activo Acústico Estructural: una revisión del estado del arte____________________________________________________________________________________________
94