chapter 1 digital signal processing introductionportal.unimap.edu.my/portal/page/portal30/lecturer...
TRANSCRIPT
UniMAP
Chapter 1Digital Signal Processing
Introduction
EKT 353/3

• Course Outcome 1 (CO1): Ability to
apply the knowledge of mathematical
tools for analyzing and evaluating
discrete time signal.
• Chapter 1
Introduction to DSP, sampling
Review of discrete signals and systems, Z-
Transform and region of convergence.
Outline
• Signal & System
• Operation related to DSP
• Sampling
• Review to LTI system
• Review to Z transform
• Review to Fourier transform

Signal and System
Signal
• A signal is any variable that carries information.
Examples of the types of signals of interest are:
Speech (telephony, radio, everyday communication)
Biomedical signals (Electroencephalogram),(EEG),
technique for studying the electrical current within the
brain)
Sound and music
Video and image
Radar signals (range and bearing).
• Humans are the most advanced signal
processors

Signal
• Signals are patterns of variation of physical
quantities such as temperature, pressure,
voltage, brightness, etc.
• Two different standpoints of signal:
The time domain.
• the trace on an oscilloscope where the vertical deflection is
the signals amplitude, and the horizontal deflection is the
time variable.
The frequency domain.
• trace on a spectrum analyzer, where the horizontal deflection
is the frequency variable and the vertical deflection is the
signals amplitude at that frequency.

Signal Types
• Analog signals: continuous in time and amplitude
Example: voltage, current, temperature,…
• Digital signals: discrete both in time and amplitude
Example: attendance of this class, digitizes analog signals,…
• Discrete-time signal: discrete in time, continuous in amplitude
Example:hourly change of temperature in Austin
• Theory for digital signals would be too complicated
Requires inclusion of nonlinearities into theory
• Theory is based on discrete-time continuous-amplitude signals
Most convenient to develop theory
Good enough approximation to practice with some care
• In practice we mostly process digital signals on processors
Need to take into account finite precision effects
Types of signals
• Types of signals in various applications
Electrical signals: voltage, current, magnetic and electric
fields,…
Mechanical signals: velocity, force, displacement,…
Acoustic signals: sound, vibration,…
Other signals: pressure, temperature,…
• Most real-world signals are analog
They are continuous in time and amplitude
Convert to voltage or currents using sensors and transducers
• Analog circuits process these signals using
Resistors, Capacitors, Inductors, Amplifiers,…
• Analog signal processing examples
Audio processing in FM radios
Video processing in traditional TV sets
System
• A physical device that performs an operation on a signal
• Example : a filter to reduce noise & interference
corrupting a desired information bearing signal.
Filter perform operation on the signal
Effect : filtering/reducing noise & inference
• Example
microphones convert air pressure to electrical current and
speakers convert electrical current to air pressure.
• System is characterized by the type of operation that it
perform on the signal
• Definition of system include physical devices and
software realization

Digital Signal
• Digital signal processing (DSP) is concerned with the
digital representation of signals and the use of digital
processors to analyse, modify, or extract information
from signals.
• Many signals in DSP are derived from analogue signals
which have been sampled at regular intervals and
converted into digital form.
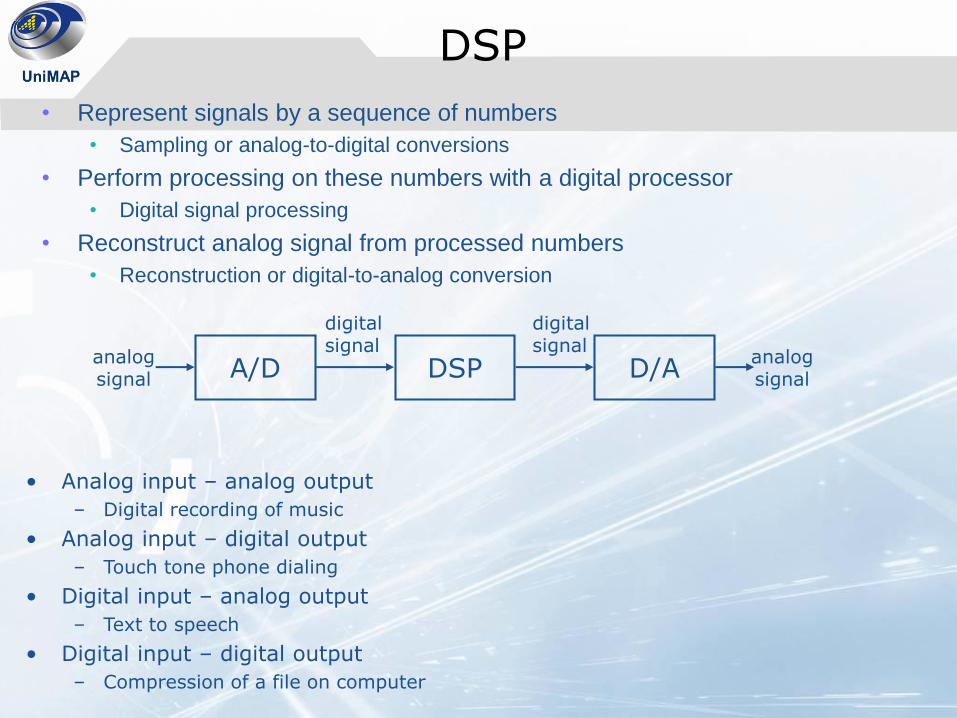
DSP
• Represent signals by a sequence of numbers
• Sampling or analog-to-digital conversions
• Perform processing on these numbers with a digital processor
• Digital signal processing
• Reconstruct analog signal from processed numbers
• Reconstruction or digital-to-analog conversion
A/D DSP D/Aanalogsignal
analogsignal
digital signal
digital signal
• Analog input – analog output
– Digital recording of music
• Analog input – digital output
– Touch tone phone dialing
• Digital input – analog output
– Text to speech
• Digital input – digital output
– Compression of a file on computer
Pros and Cons of Digital Signal Processing
• Pros
Accuracy can be controlled by choosing word length
Repeatable
Sensitivity to electrical noise is minimal
Dynamic range can be controlled using floating point numbers
Flexibility can be achieved with software implementations
Non-linear and time-varying operations are easier to implement
Digital storage is cheap
Digital information can be encrypted for security
Price/performance and reduced time-to-market
• Cons
Sampling causes loss of information
A/D and D/A requires mixed-signal hardware
Limited speed of processors
Quantization and round-off errors


Test ur understanding

Key operation in DSP
• Convolution
• Correlation
• Filtering
• Transformation
• Modulation
All basic DSP operations require only simple
arithmetic operations of multiply,
add/substract and shift to carry out.

Basic Operation
• Product (modulation) operation:
y[n]=x[n].w[n]
Modulator:
• An application is in forming a finite-length
sequence from an infinite-length sequence by
multiplying with a window sequence. This
process is usually called windowing
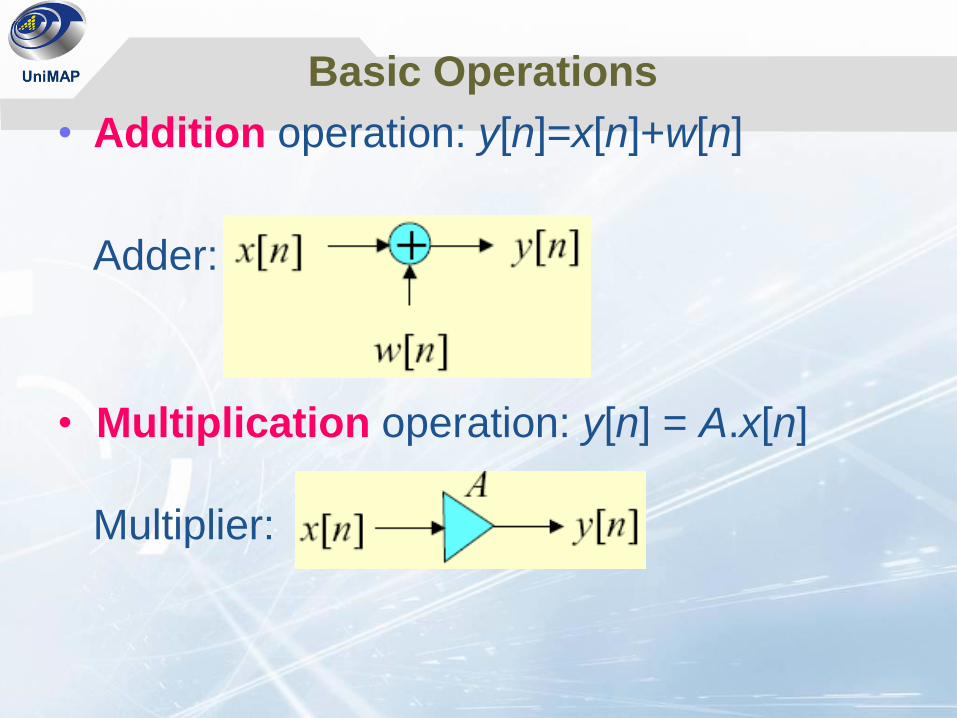
Basic Operations
• Addition operation: y[n]=x[n]+w[n]
Adder:
• Multiplication operation: y[n] = A.x[n]
Multiplier:
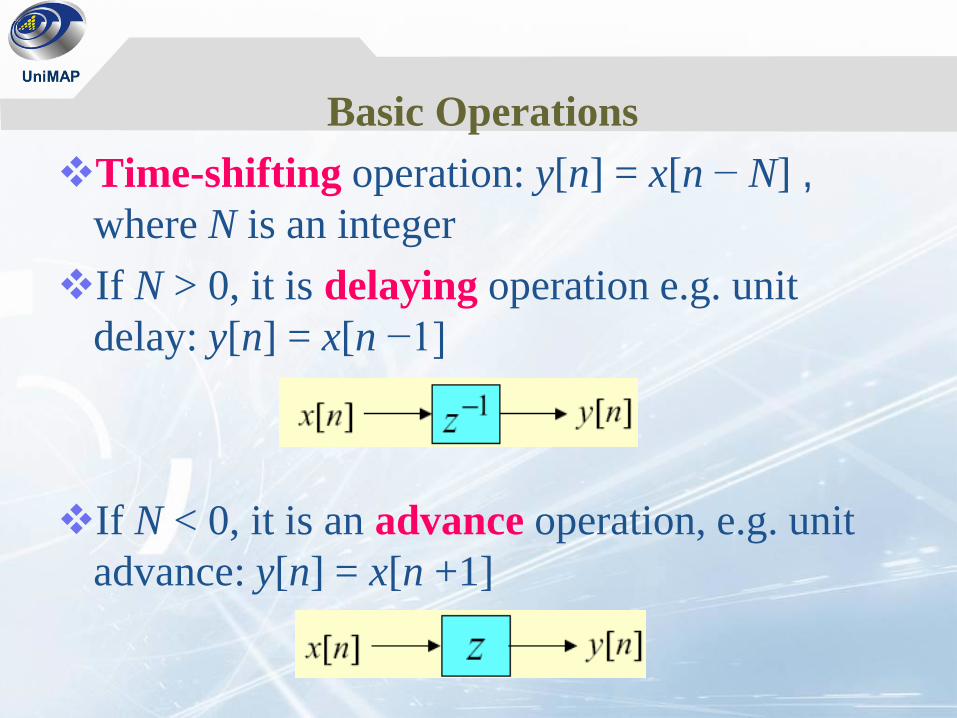
Basic Operations
Time-shifting operation: y[n] = x[n − N] ,
where N is an integer
If N > 0, it is delaying operation e.g. unit
delay: y[n] = x[n −1]
If N < 0, it is an advance operation, e.g. unit
advance: y[n] = x[n +1]
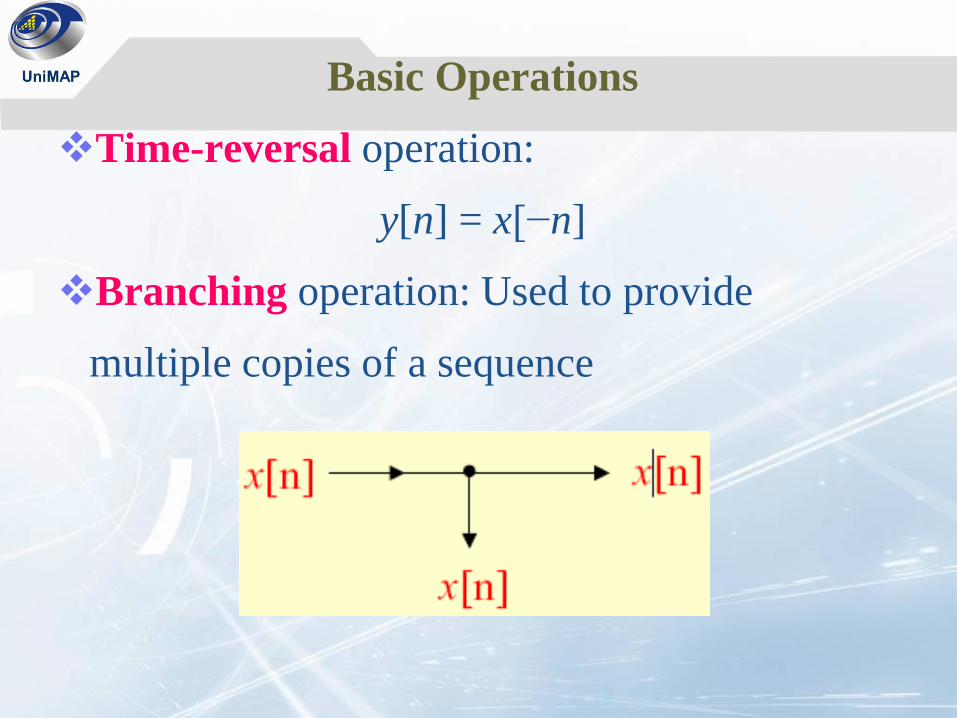
Basic Operations
Time-reversal operation:
y[n] = x[−n]
Branching operation: Used to provide
multiple copies of a sequence
21
Basic Operations
• Example: Consider the two following
sequences of length 5 defined for 0 ≤ n ≤ 4:
{a[n]}={3 4 6 − 9 0}
{b[n]}={2 −1 4 5 −3}
• New sequences generated from the above two
sequences by applying the basic operations
are as follows:
22
Basic Operations
{c[n]}= {a[n]⋅b[n]}= {6 − 4 24 − 45 0}
{d[n]}= {a[n]+ b[n]}= {5 3 10 − 4 −3}
{e[n]}={4.5 6 9 13.5 0}
• As pointed out by the above examples,
operations on two or more sequences can be
carried out if all sequences involved are of
same length and defined for the same range of
the time index n
23
Basic Operations
• However if the sequences are not of same
length, in some situations, this problem can
be circumvented by appending zero-valued
samples to the sequence(s) of smaller
lengths to make all sequences have the same
range of the time index
• Example: Consider the sequence of length 3
• defined for 0 ≤ n ≤ 2 :{f [n]}= {− 2 1 −3}
24
Basic Operations
• We cannot add the length-3 sequence
to the length-5 sequence {a[n]} defined
earlier
• We therefore first append {f [n]} with 2
zero-valued samples resulting in a length-5
sequence {fe[n]}= {− 2 1 − 3 0 0}
• Then {g[n]} ={a[n]}+{fe[n]} ={1 5 3 − 9 0}
25
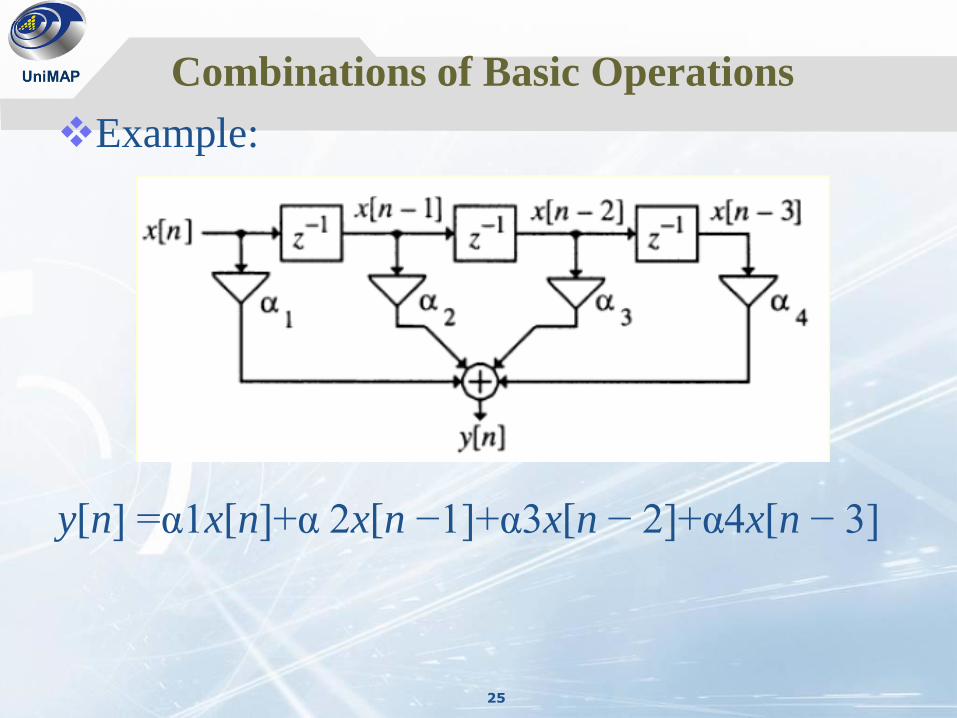
Combinations of Basic Operations
Example:
y[n] =α1x[n]+α 2x[n −1]+α3x[n − 2]+α4x[n − 3]
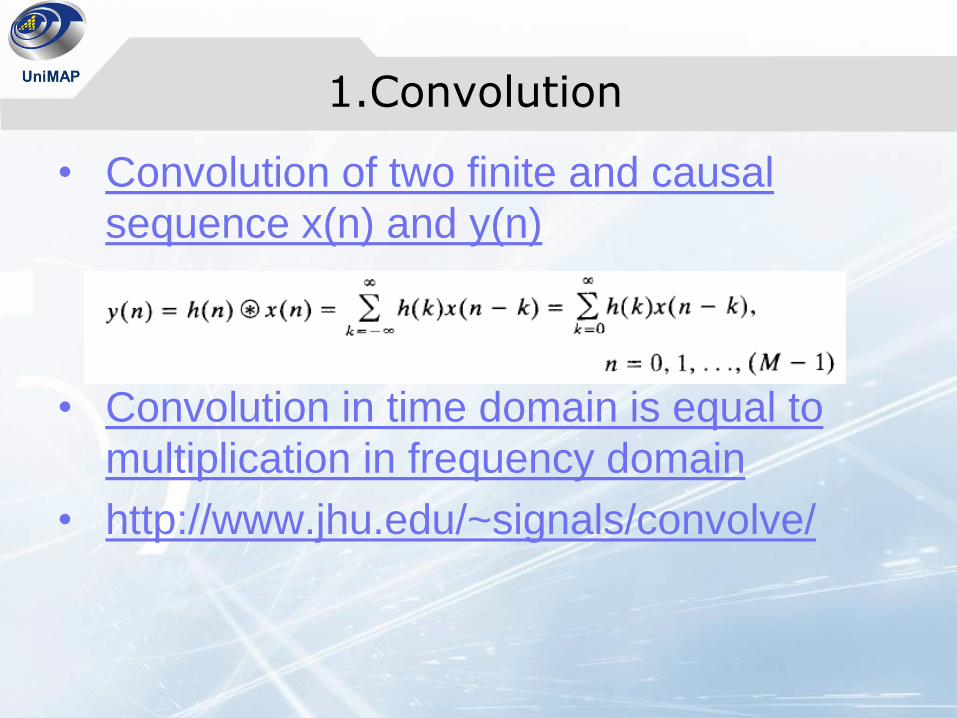
1.Convolution
• Convolution of two finite and causal
sequence x(n) and y(n)
• Convolution in time domain is equal to
multiplication in frequency domain
• http://www.jhu.edu/~signals/convolve/

2.Correlation
Auto correlation Involve only one signal and
provides information about the
structure of the signal and its
behaviour in the time domain.
Useful in identifying hidden
periodicities.
Cross correlation (CCF) Is a measure of similarities or
shared properties between two
signals
Example : Cross spectral
analysis, pattern matching,
delay measurement.
Cross correlation
of random signal
Delayed
noisy signal
Cross correlation
Delay between 2
signal
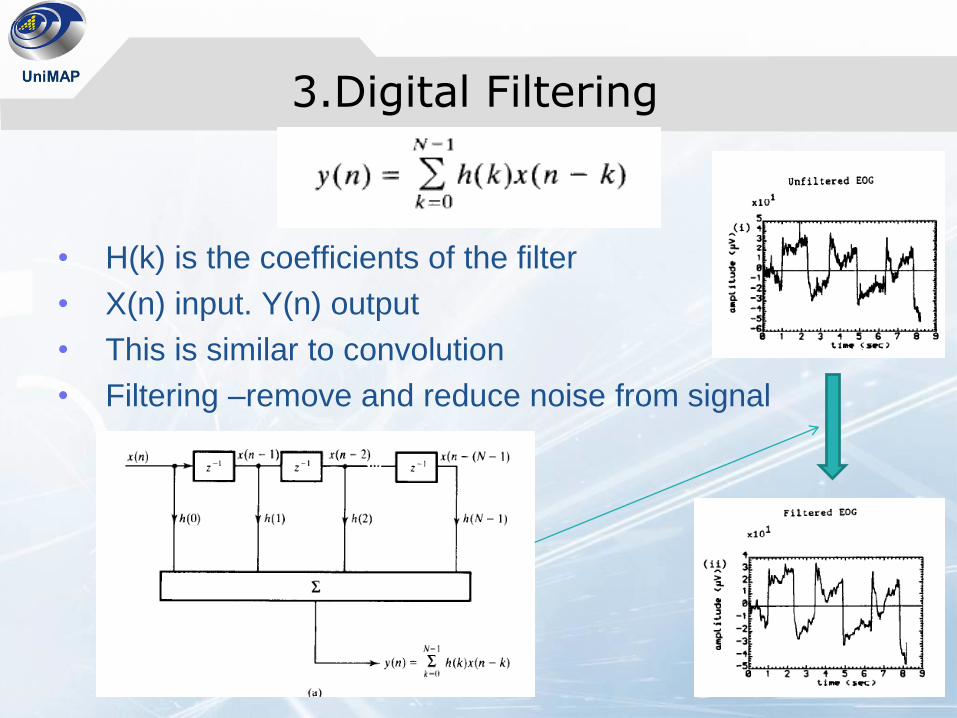
3.Digital Filtering
• H(k) is the coefficients of the filter
• X(n) input. Y(n) output
• This is similar to convolution
• Filtering –remove and reduce noise from signal
Operation
4. Discrete
Transformation
Allow representation of
dicrete-time signal to
frequency domain or vice
verca.
Important to determine
BW require to transmit
signal
5. Modulation
Signal modulation for
transmission or storage
Varying a property of high
frequency signal (carrier),
to the signal.
Common scheme, ASK,
PSK and FSK

UniMAP
Sampling
Part 2
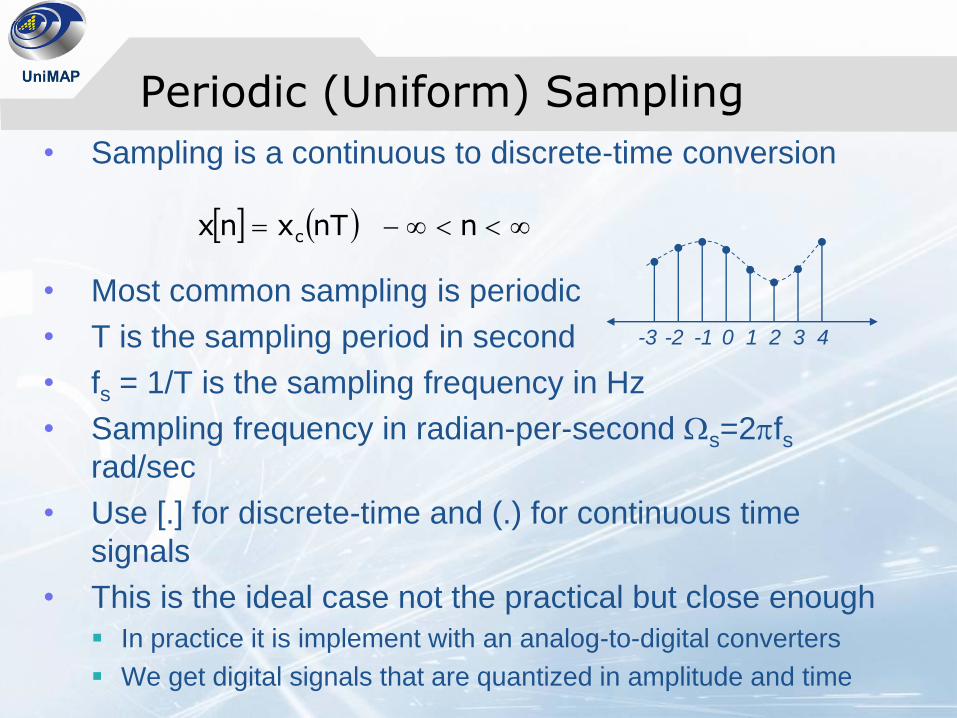
Periodic (Uniform) Sampling
• Sampling is a continuous to discrete-time conversion
• Most common sampling is periodic
• T is the sampling period in second
• fs = 1/T is the sampling frequency in Hz
• Sampling frequency in radian-per-second s=2fs
rad/sec
• Use [.] for discrete-time and (.) for continuous time
signals
• This is the ideal case not the practical but close enough
In practice it is implement with an analog-to-digital converters
We get digital signals that are quantized in amplitude and time
nnTxnx c
-3 -2 2 3 4-1 10
Periodic Sampling
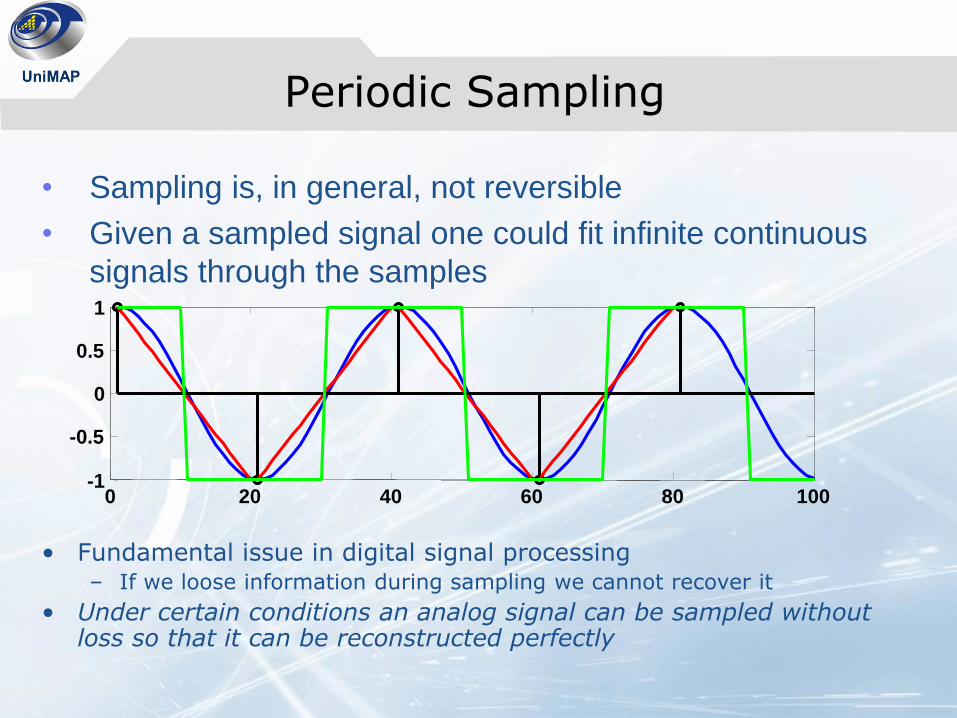
• Sampling is, in general, not reversible
• Given a sampled signal one could fit infinite continuous
signals through the samples
0-1
20 40 60 80 100
-0.5
0
0.5
1
• Fundamental issue in digital signal processing– If we loose information during sampling we cannot recover it
• Under certain conditions an analog signal can be sampled without loss so that it can be reconstructed perfectly
Sampling Demo• In this movie the video camera is sampling at a fixed rate of 30 frames/second.
• Observe how the rotating phasor aliases to different speeds as it spins faster.
• http://www.ewh.ieee.org/soc/es/Aug1996/011/cd/Demos/Sampling/
• Demo from DSP First: A Multimedia Approach by McClellan, Schafer, Yoder
n
f
f2j
s
tf2j
s
o
o
ef/npnTpnp
etp
Aliasing effect
In this movie the
video camera is
sampling at a fixed
rate of 30
frames/second.
Observe how the
rotating phasors alias
to a different speed
as the disk spins
faster. The fact that
the four phasors are
identical further
contributes to the
aliasing effect.
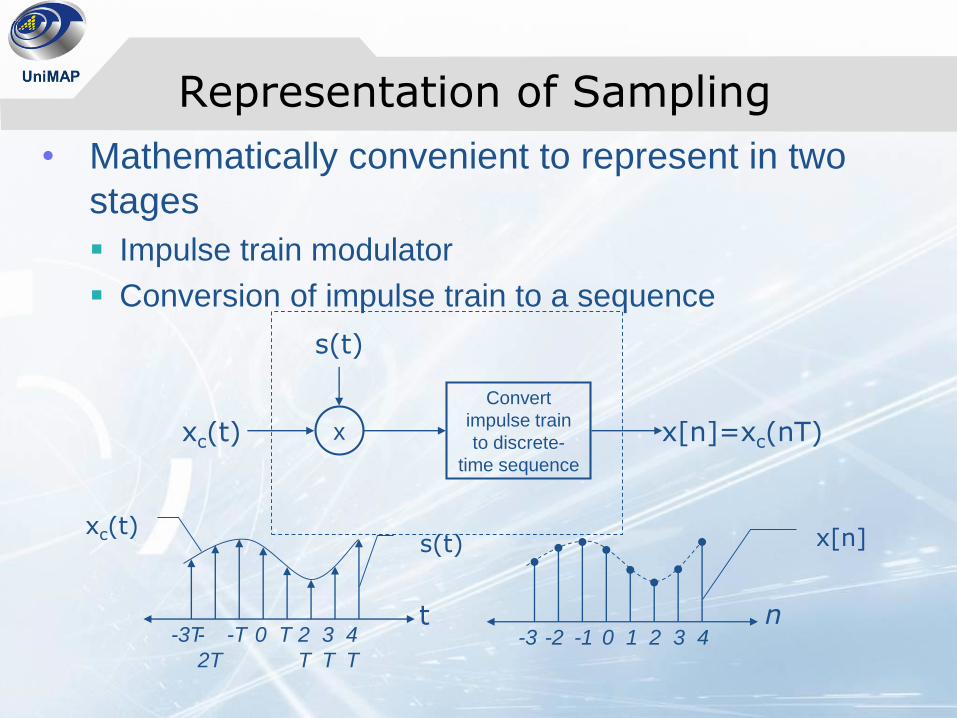
Representation of Sampling
• Mathematically convenient to represent in two
stages
Impulse train modulator
Conversion of impulse train to a sequence
Convert
impulse train
to discrete-
time sequence
xc(t) x[n]=xc(nT)x
s(t)
-3T-
2T
2
T
3
T
4
T
-T T0
s(t)xc(t)
t
x[n]
-3 -2 2 3 4-1 10n
36
Continuous-Time Fourier Transform
• Continuous-Time Fourier transform pair is defined as
• We write xc(t) as a weighted sum of complex exponentials
• Remember some Fourier Transform properties
Time Convolution (frequency domain multiplication)
Frequency Convolution (time domain multiplication)
Modulation (Frequency shift)
dtetxjX tjcc
dejX2
1tx tj
cc
)j(Y)j(X)t(y)t(x
)j(Y)j(X)t(y)t(x
o
tj jXe)t(x o
351M Digital Signal Processing37
Frequency Domain Representation of Sampling
• Modulate (multiply) continuous-time signal with pulse
train:
• Let’s take the Fourier Transform of xs(t) and s(t)
• Fourier transform of pulse train is again a pulse train
• Note that multiplication in time is convolution in
frequency
• We represent frequency with = 2f hence s = 2fs
n
nTt)t(s
n
ccs nTttxtstxtx
k
skT
2jS
jSjX
2
1jX cs
k
scs kjXT
1jX
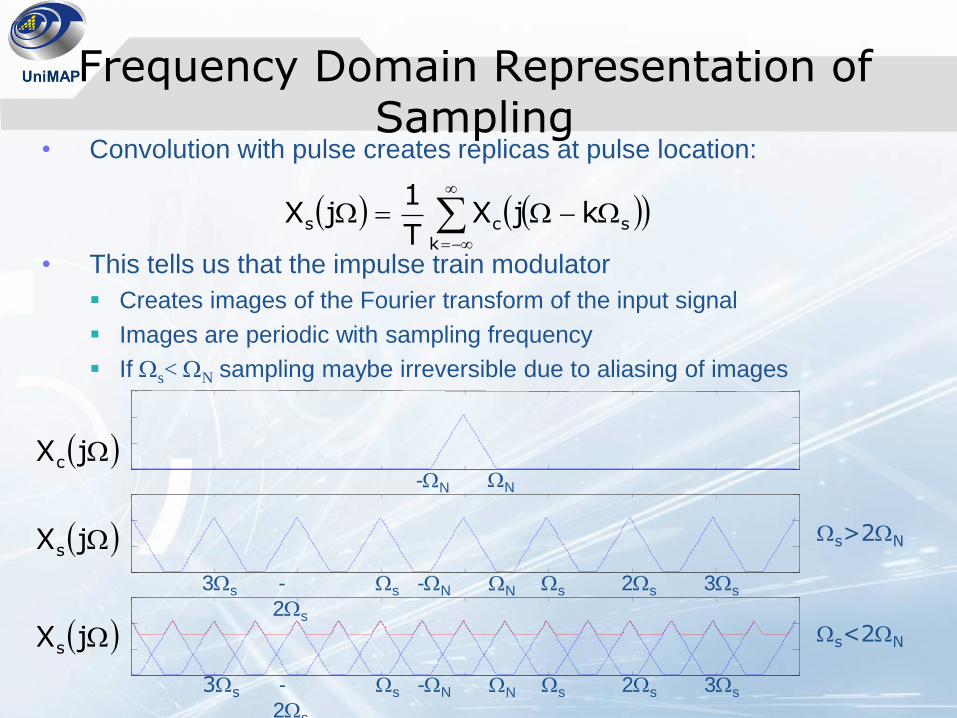
Frequency Domain Representation of Sampling
• Convolution with pulse creates replicas at pulse location:
• This tells us that the impulse train modulator
Creates images of the Fourier transform of the input signal
Images are periodic with sampling frequency
If s< N sampling maybe irreversible due to aliasing of images
k
scs kjXT
1jX
jXc
jXs
jXs
N-N
N-N s 2s 3s-
2s
s3s
N-N s 2s 3s-
2s
s3s
s<2N
s>2N
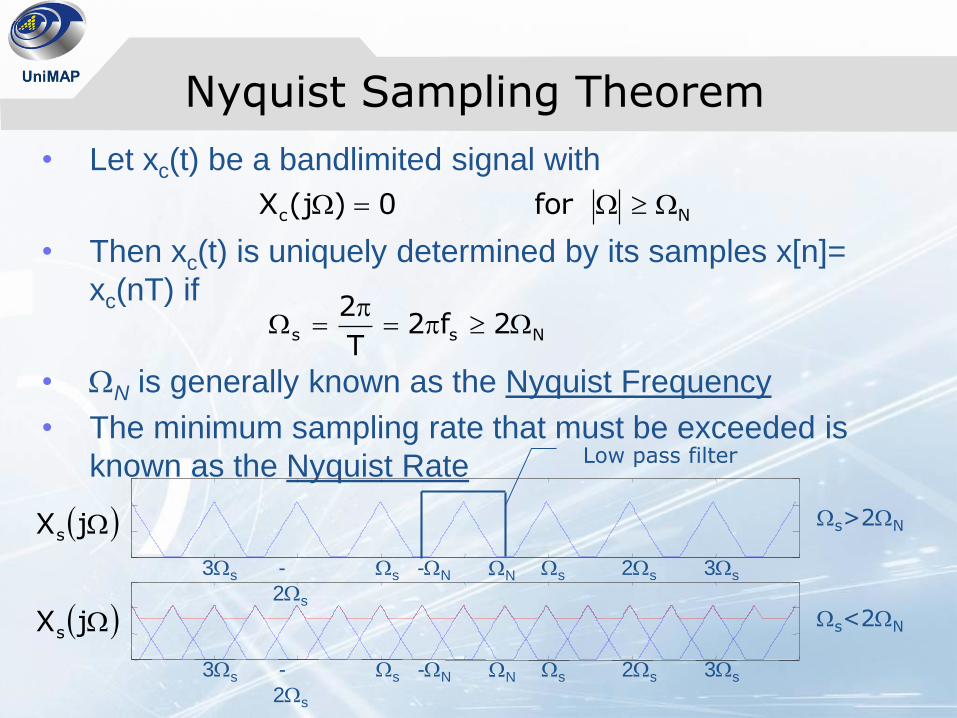
Nyquist Sampling Theorem
• Let xc(t) be a bandlimited signal with
• Then xc(t) is uniquely determined by its samples x[n]=
xc(nT) if
• N is generally known as the Nyquist Frequency
• The minimum sampling rate that must be exceeded is
known as the Nyquist Rate
Nc for 0)j(X
Nss 2f2T
2
jXs
jXs
N-N s 2s 3s-
2s
s3s
N-N s 2s 3s-
2s
s3s
s<2N
s>2N
Low pass filter
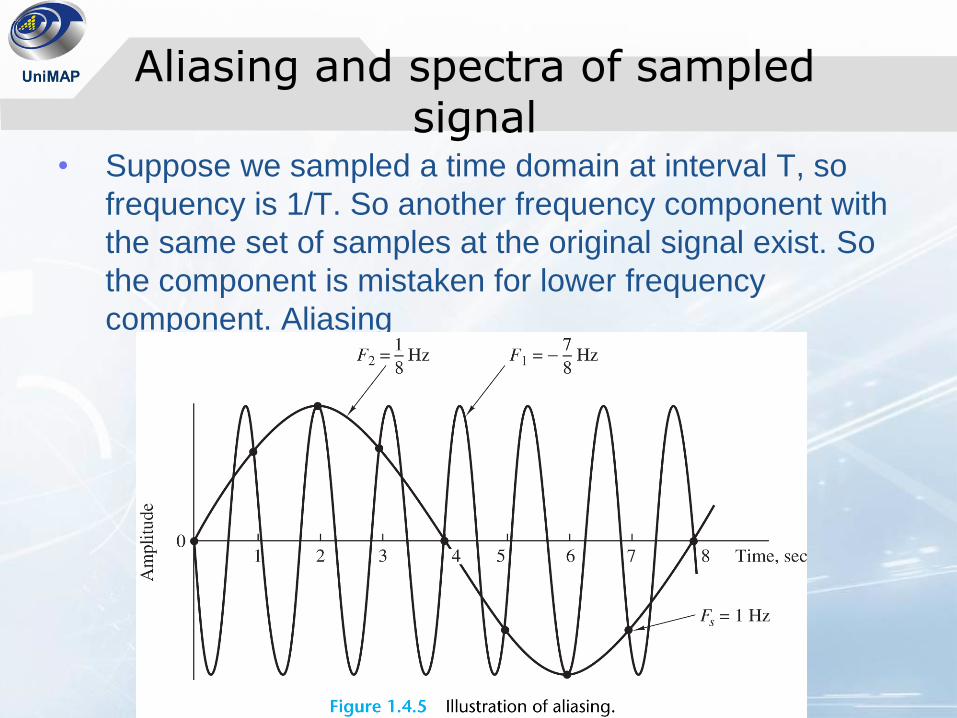
Aliasing and spectra of sampled signal
• Suppose we sampled a time domain at interval T, so
frequency is 1/T. So another frequency component with
the same set of samples at the original signal exist. So
the component is mistaken for lower frequency
component. Aliasing
Demo
Aliasing demo
http://www.ami.ac.uk/courses/topics/0020_aliasdemo/ind
ex.html
Sample Mania
http://www.jhu.edu/~signals/sampling/index.html
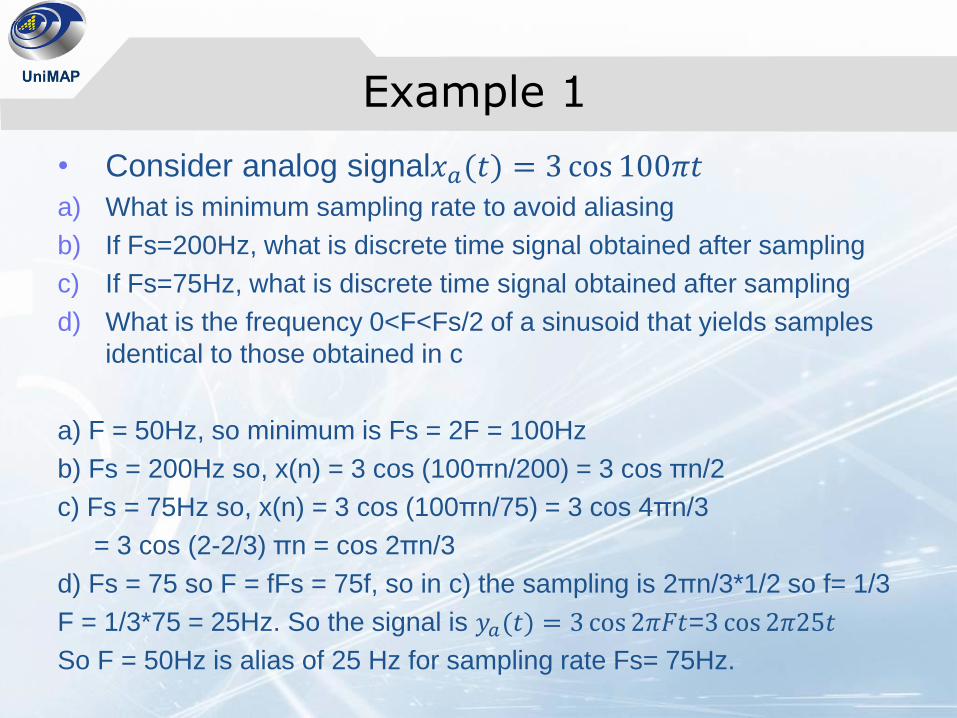
Example 1
• Consider analog signal𝑥𝑎(𝑡) = 3 cos 100𝜋𝑡a) What is minimum sampling rate to avoid aliasing
b) If Fs=200Hz, what is discrete time signal obtained after sampling
c) If Fs=75Hz, what is discrete time signal obtained after sampling
d) What is the frequency 0<F<Fs/2 of a sinusoid that yields samples
identical to those obtained in c
a) F = 50Hz, so minimum is Fs = 2F = 100Hz
b) Fs = 200Hz so, x(n) = 3 cos (100πn/200) = 3 cos πn/2
c) Fs = 75Hz so, x(n) = 3 cos (100πn/75) = 3 cos 4πn/3
= 3 cos (2-2/3) πn = cos 2πn/3
d) Fs = 75 so F = fFs = 75f, so in c) the sampling is 2πn/3*1/2 so f= 1/3
F = 1/3*75 = 25Hz. So the signal is 𝑦𝑎(𝑡) = 3 cos 2𝜋𝐹𝑡=3 cos 2𝜋25𝑡
So F = 50Hz is alias of 25 Hz for sampling rate Fs= 75Hz.
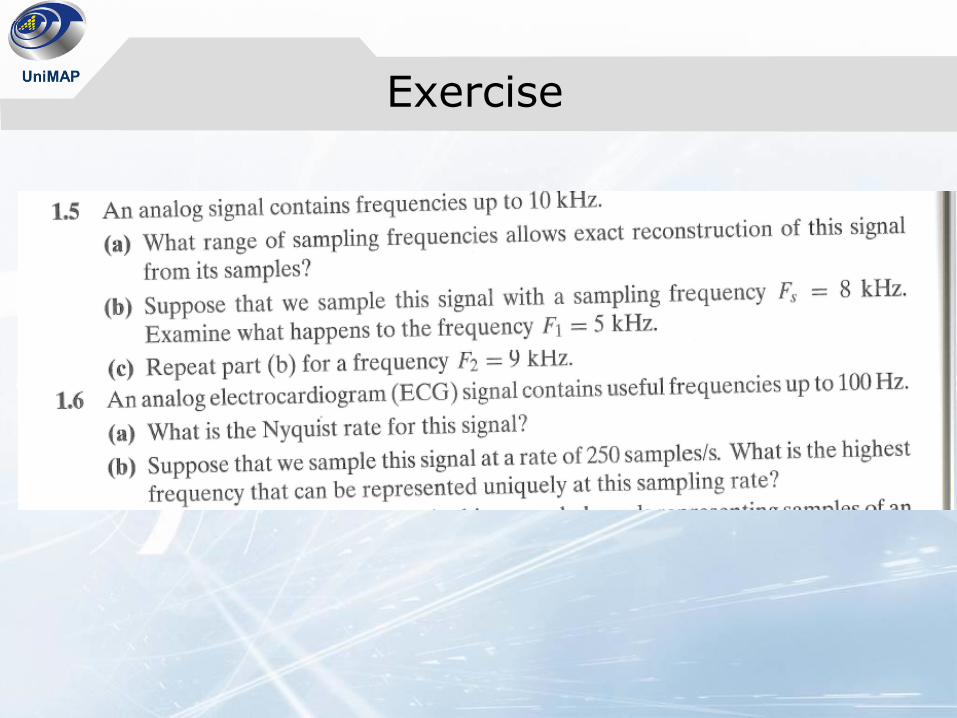
Exercise
• (a) A continuous time signal, is
sampled at the rate of 50 Hz. Analyze and
determine the aliased signal in the output
A continuous time signal,
is sampled at the rate of 50 Hz. Analyze and determine the aliased signal in the outputA continuous time signal,
is sampled at the rate of 50 Hz. Analyze and determine the aliased signal in the output
)176cos(2)120sin(3)24cos(5)20sin(4)( tttttxa