caracterización del comportamiento de silenciadores de
TRANSCRIPT

CARACTERIZACIÓN DEL COMPORTAMIENTO DE SILENCIADORES DE
CÁMARA DE EXPANSIÓN
Autor:
BRAYAN DARÍO FORIGUA GONZALEZ
Asesor:
ANDRES L. GONZALEZ M. PhD. MSc.
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERIA
DEPARTAMENTO DE INGENIERÍA MECÁNICA
DICIEMBRE DE 2015

“Solo con el corazón se puede ver bien, lo esencial es invisible para los ojos”
-Antoine de Saint-Exupéry
AGRADECIMIENTOS
En primer lugar, a mis padres y el apoyo que me dieron sobre todo el proyecto. La ayuda siempre
deberá ser recibida, aunque uno al comienzo no la desee.
A mi hermana, incluso cuando no nos especializamos en la misma área, el apoyo y ayuda en
detalles es lo que mantiene la motivación en el proyecto.
A mi asesor, por su guía en el desarrollo del proyecto. A los técnicos de laboratorio por toda su
ayuda durante las pruebas. A mis amigos, como agradecimiento sobre toda la carrera y no solo el
proyecto, son las amistades las que llevan a las personas a progresar.
Tabla de contenido NOMENCLATURA ................................................................................................................................ 1
INTRODUCCIÓN ................................................................................................................................... 1
JUSTIFICACIÓN .................................................................................................................................... 1
OBJETIVOS ........................................................................................................................................... 2
Objetivo General ............................................................................................................................. 2
Objetivos específicos ....................................................................................................................... 2
ESTADO DEL ARTE ............................................................................................................................... 2
MARCO TEÓRICO ................................................................................................................................. 4
Atenuador de Sonido ...................................................................................................................... 4
Silenciadores Disipativos ..................................................................................................... 4
Silenciadores Reactivos ....................................................................................................... 4
Unidades de medición del sonido ................................................................................................... 5
Parámetros de desempeño de atenuadores de sonido .................................................................. 6
Desarrollo físico y matemático ........................................................................................................ 7
Matemática relacionada a ondas en tuberías ............................................................................. 7
Desarrollo matemático sobre cámaras de expansión ............................................................... 10
Serie de Fourier ............................................................................................................................. 11
PROCEDIMIENTO ............................................................................................................................... 12
Selección del banco de pruebas .................................................................................................... 12
Método de Descomposición ............................................................................................. 12
Método de dos fuentes ..................................................................................................... 12
Método de dos cargas ....................................................................................................... 13
Método de impulso ........................................................................................................... 13
Programas y software ................................................................................................................... 15
EES ............................................................................................................................................. 15
Audacity ..................................................................................................................................... 15
LabView ..................................................................................................................................... 16
MatLab ...................................................................................................................................... 18
Equipos y Materiales ..................................................................................................................... 18
Construcción del banco de pruebas .............................................................................................. 19
Realización de las pruebas ............................................................................................................ 20
RESULTADOS ..................................................................................................................................... 22
Calibración de los micrófonos ....................................................................................................... 22
Resultados de las pruebas ............................................................................................................. 22
ANÁLISIS DE RESULTADOS ................................................................................................................. 24
CONCLUSIONES ................................................................................................................................. 27
CONSIDERACIONES A TRABAJO FUTURO .......................................................................................... 28
REFERENCIAS ..................................................................................................................................... 29
ANEXOS ............................................................................................................................................. 31
Código de MatLab usado para análisis de resultados ................................................................... 31
Código de Matlab usado para comparar los resultados experimentales ..................................... 34

INDICE DE ILUSTRACIONES
Ilustración 1. Silenciador disipativos. [11] .......................................................................................................... 4 Ilustración 2. Silenciador reactivo. [11] .............................................................................................................. 5 Ilustración 3. Sección de cambio de área.......................................................................................................... 10 Ilustración 4. Banco de pruebas para el método de descomposición. [4] ........................................................ 12 Ilustración 5. Banco de pruebas para método de dos fuentes. [4] ................................................................... 13 Ilustración 6. Banco de pruebas para método de dos cargas. [4] .................................................................... 13 Ilustración 7. Montaje método de impulso. [5] ................................................................................................ 14 Ilustración 8. Interfaz de creación de señal. ..................................................................................................... 16 Ilustración 9. Silenciamiento de la señal. .......................................................................................................... 16 Ilustración 10. Señal de impulso creada en Labview. ....................................................................................... 16 Ilustración 11. Importación de audio en LabView. ........................................................................................... 17 Ilustración 12. Diagrama de bloques para generación de señal. ..................................................................... 17 Ilustración 13. Diagrama de bloques para grabación de audio. ....................................................................... 17 Ilustración 14. Planos dimensionales de la cámara de expansión usada en el banco de pruebas. .................. 19 Ilustración 15. Banco de pruebas, punto de medición de datos. ...................................................................... 20 Ilustración 16. Banco de pruebas con cobijas para disminución de ruido. ....................................................... 21 Ilustración 17. Conexión de sistemas para generación de señal. ..................................................................... 21 Ilustración 18. Conexión de sistemas al computador. ...................................................................................... 22 Ilustración 19. Espectro de calibración del micrófono 1. Ilustración 20. Espectro de calibración del
micrófono 2. ..................................................................................................................................................... 22 Ilustración 21. Onda a la entrada de la cámara de expansión. ........................................................................ 23 Ilustración 22. Onda capturara a la salida de la cámara de expansión. ........................................................... 23 Ilustración 23. Resultados de TL. ...................................................................................................................... 24 Ilustración 24. Curva de comportamiento teórico y experimental. .................................................................. 25 Ilustración 25. TL después de variación en la longitud de la cámara ............................................................... 25 Ilustración 26. TL después de variación en la temperatura del aire. ................................................................ 26 Ilustración 27. Comparación de resultados computacionales y teórico. [18] ................................................... 27
INDICE DE ECUACIONES
Ecuación 1. Intensidad acústica. [12] ................................................................................................................. 5 Ecuación 2. Potencia acústica. [12] .................................................................................................................... 5 Ecuación 3. SPL. [12] ........................................................................................................................................... 5 Ecuación 4. Nivel de intensidad. [12] .................................................................................................................. 5 Ecuación 5. Nivel de Potencia. [12] ..................................................................................................................... 5 Ecuación 6. Impedancia Acústica. [12] ............................................................................................................... 6 Ecuación 7. Perdida de transmisión. [12] ........................................................................................................... 6 Ecuación 8. Perdida de inserción. [12] ................................................................................................................ 6 Ecuación 9. Reducción de Ruido. [12] ................................................................................................................. 6 Ecuación 10. Ecuación de onda 3D. [12] ............................................................................................................. 7 Ecuación 11. Laplaciano de un sistema de coordenadas polar. ......................................................................... 7 Ecuación 12. Solución de la ecuación de onda para una tubería circular. [12] .................................................. 7 Ecuación 13. Ecuación diferencial en función del radio en una tubería. [12] ..................................................... 7 Ecuación 14. Función de Bessel. [14] .................................................................................................................. 8 Ecuación 15. Solución a la ecuación de Bessel. [12] ........................................................................................... 8 Ecuación 16. Segunda condición de frontera para ecuación del radio. ............................................................. 8 Ecuación 17. Solución de la ecuación de onda en tubería circular. [12] ............................................................. 8 Ecuación 18. Ecuación de equilibrio dinámico en dirección axial. [12] ............................................................... 8 Ecuación 19. Ecuación de velocidad en una tubería circular. [12] ...................................................................... 8 Ecuación 20. Ecuación de Navier-Stokes. [12] .................................................................................................... 9 Ecuación 21. Solución de la ecuación de presión incluyendo la viscosidad. [12] ................................................ 9 Ecuación 22-23.Ecuaciones de velocidad y presión escritas de forma simplificada ........................................... 9 Ecuación 24. Definición coeficiente de reflexión. [12] ...................................................................................... 10 Ecuación 25. Relación entre el coeficiente de Reflexión y la impedancia. [12] ................................................. 10 Ecuación 26. Coeficiente de reflexión para un cambio de área simple. [12] .................................................... 10 Ecuación 27. TL para un cambio de sección de área. [12] ................................................................................ 11 Ecuación 28. TL para una cámara de expansión. [13] ...................................................................................... 11 Ecuación 29. Serie de Fourier. [15] ................................................................................................................... 11 Ecuación 30-31. Coeficientes de Fourier. [15] .................................................................................................. 11 Ecuación 32-33. Coeficientes de Fourier discretos. ........................................................................................... 11 Ecuación 34. Serie de Fourier en notación compleja. [15] ................................................................................ 12 Ecuación 35-36. Primera consideración de Singh. [5] ....................................................................................... 14 Ecuación 37-38. Segunda consideración de Singh. [5]...................................................................................... 14

INDICE DE TABLAS
Tabla 1. Material y equipos ya provistos por la universidad. ........................................................................... 18 Tabla 2. Presupuesto de material solicitado. .................................................................................................... 18
1
NOMENCLATURA 𝑡 Tiempo
𝑃 Presión
𝑢 Velocidad
𝜇 Viscosidad
𝜌 Densidad
𝐼 Intensidad Acústica
𝑊 Potencia Acústica
𝑆𝑃𝐿 Nivel de presión de sonido
𝐼𝐼 Nivel de intensidad
𝐿𝑊 Nivel de potencia
𝑌 Impedancia acústica
𝑇𝐿 Perdida de transmisión
𝐼𝐿 Perdida de inserción
𝑁𝑅 Reducción de Ruido
𝑎 Velocidad del sonido
𝑀 Velocidad de flujo en Mac
𝐵 Longitud de datos tomados
𝑘 Número de onda
𝜔 Frecuencia
𝑆 Área
𝑅 Coeficiente de reflexión
INTRODUCCIÓN Hoy en día existe una gran necesidad en la disminución del ruido relacionado al ruido urbano y
dentro del sector industrial, parte de la solución a estos problemas de ruido está en el diseño de
atenuadores de sonido, donde se ha realizado un amplio estudio en como su diseño afecta en las
propiedades de atenuación de este. El estudio de atenuadores se divide en dos partes, uno es el
desarrollo en programas y simulaciones que intenten predecir el comportamiento de estos
atenuadores, y el otro está en las pruebas experimentales que buscan caracterizar el
comportamiento de los atenuadores ya en funcionamiento.
La importancia del diseño computacional de los atenuadores se debe a que un sistema ya
construido es imposible cambiarlo para obtener las características deseadas. De la misma forma, el
objetivo del diseño experimental es además de caracterizar un atenuador poder comparar el
resultado con la aproximación computacional y analizar qué tan acertado es la predicción teórica.
Dentro del siguiente documento, se mostrara el desarrollo de un banco de pruebas realizado en la
universidad de Los Andes junto con el análisis de selección del tipo de pruebas que se realizó para
la caracterización del atenuador de sonido. De la misma forma, se muestra un resumen del
desarrollo teórico sobre los atenuadores de sonido, en particular las cámaras de expansión.
JUSTIFICACIÓN El ruido urbano proveniente del transporte vehicular es uno de los principales factores
contaminante de las ciudades, producto de la necesidad de movilización diaria de millones de
personas, y se ha convertido en una problemática creciente en las grandes ciudades ya que
representa un peligro para la salud humana; la intensidad y el tiempo de exposición a estos ruidos
son un peligro que pueden ocasionar daños permanentes en el oído de los ciudadanos. Al
2
respecto, según la OMS (Organización Mundial de Salud) existen aproximadamente 500 millones
de personas que sufren por los altos niveles de ruido urbano [1].
Con el fin de reducir los efectos del ruido vehicular se han diseñado diferentes tipos de
silenciadores o atenuadores de sonido a lo largo de los años. Sin embargo, existía la dificultad para
determinar la calidad del silenciador antes de ser manufacturado e instalado, razón por la cual se
han diseñado modelos computacionales que, a partir de modelos matemáticos permiten predecir
el comportamiento de estos silenciadores, igualmente, se han implementado bancos de pruebas
para medir la atenuación del ruido que estos producen.
Por lo anterior y con el fin hacer una caracterización de un silenciador, se implementó un banco
de pruebas en la Universidad de los Andes; se observó el comportamiento experimental del
silenciador de tipo cámara de expansión y se comparó y analizó la efectividad de estos resultados
con un modelo matemático previsto para este tipo de silenciadores.
OBJETIVOS
Objetivo General Caracterizar el comportamiento de atenuadores de sonido de cámara de expansión de
forma experimental.
Objetivos específicos Investigar sobre la física de las variables que afectan las cámaras de expansión y su
desarrollo por modelos analíticos.
Diseñar y construir con base a un modelo propuesto un banco de pruebas para la
medición de atenuación de sonido.
Analizar datos sobre el desempeño acústico de cámaras de expansión en comparación con
modelos analíticos.
ESTADO DEL ARTE Con base a la fabricación de maquinaria se ha generado una gran necesidad sobre el desarrollo de
atenuadores de sonido. De forma particular, se han realizado diversas investigaciones sobre el
diseño y caracterización de cámaras de expansión. El objetivo principal de los estudios de los
silenciadores es el lograr predecir el comportamiento de estos de forma teórica. En relación a
esto, Eriksson [2] realizó un estudio el cual se enfocó en como los parámetros físicos afectan el
sistema y como al variar estos la respuesta del atenuador se ve afectada.
Del otro lado, otros estudio sobre silenciadores de cámaras de expansión en modelos
computacionales para predecir el comportamiento de estos atenuadores. Un ejemplo sobre las
aproximaciones del comportamiento de los atenuadores para llevarlos a modelos
computacionales se ve en el trabajo de Hua llamado “Determination of transmission and insertion
loss for multi-inlet mufflers using impedance matrix and superposition approaches with
comparisons” [3]. En este, el autor desarrolló un modelo matricial de la impedancia de una cámara
de expansión que tiene dos entradas con fuentes independientes y realizó diferentes simulaciones
para diferentes métodos de solución, luego, comparó sus resultados con resultados
experimentales con los mismos parámetros físicos establecidos en el modelo. Adicionalmente, al
3
estar caracterizando una cámara con dos entradas, aplicó métodos de superposición que
facilitaran el procedimiento de esta caracterización, y por medio de comparaciones con resultados
experimentales y su modelo matricial validó esta metodología de análisis.
Por lo anterior, es importante mencionar que no basta solo con diseñar modelos que predigan el
comportamiento de los atenuadores de sonido, sino que es necesario realizar una comparación
experimental que muestre que tan acertado es el modelo computacional a la realidad. En relación
a esto, un estudio realizado por Tao: “A Review of Current Techniques for Measuring Muffler
Transmission Loss” [4], quien realizó las diferentes metodologías para medir uno de los
parámetros de los atenuadores de sonido y analizó sus ventajas y desventajas frente a otros
parámetros de desempeño de atenuadores, lo cual hace este informe importante para el diseño
que se propone del banco de pruebas en este proyecto.
Por el otro lado, Singh en su trabajo “Development of an Impulse Technique for Measurement of
Muffler Characteristics” desarrolló un método que permite medir las propiedades de los
silenciadores por medio de la técnica de impulso (un método que no es convencional). Esta técnica
presenta varias ventajas sobre otros métodos relacionados con condiciones del atenuador en el
banco de pruebas tales como la necesidad de terminaciones anecoicas [5].
Como ya se mencionó antes, Hua analizó un modelo matricial y de superposición y luego realizó
una comparación con resultados experimentales para comprobar este comportamiento. Sin
embargo, Kumar en su trabajo “Linear Acoustic Modelling And Testing of Exhaust Mufflers” [6],
concluye que el modelo matricial predice un comportamiento unidimensional y no toma en cuenta
la reflexión de la onda en tres dimensiones. Por esta razón, es necesario hacer unas
consideraciones de correcciones de fin de la tubería que compone este silenciador para tomar en
cuenta las consideraciones previamente mencionadas, donde existen varios modelos matemáticos
que proponen diferentes cálculos para la corrección del modelo [6].
Una característica que se debe tomar en cuenta es que existe un flujo de gas (no necesariamente
aire) dentro de la cámara de expansión, Kumar en su trabajo también habla sobre esta
consideración y propone bancos de pruebas en donde se puede observar el comportamiento del
silenciador bajo este parámetro. [6]
Parte del desarrollo del estudio de atenuadores de sonido de forma computacional es el análisis
CFD, el cual Middelberg estudia en su trabajo “COMPUTATIONAL FLUID DYNAMICS ANALYSIS OF
THE ACOUSTIC PERFOMANCE OF VARIOUS SIMPLE EXPANSION CHAMBER MUFFLERS” [7].
Middelberg, menciona las consideraciones que se deben tener en cuenta para este tipo de
montaje de pruebas y realizó una comparación con resultados experimentales realizados en otros
trabajos. Es importante resaltar que Middelberg, realiza un análisis en el cual se considera el flujo
dentro de la cámara y analiza la caída de presión que existe dentro de esta a medida que cambia la
velocidad del flujo [7].
La desventaja que tiene el análisis de CFD, es que a pesar de ser acertado este solo abarca sobre
cámaras de expansión simétricas sobre cierto eje, lo cual crea grandes dificultades en caso de que
se desee estudiar sobre otras configuraciones que no cumplan con esta propiedad. Debido a esto,
Selamet realiza un estudio para cámaras de tres dimensiones que no sean necesariamente
simétricas sobre un eje, en su trabajo “Acoustic Attenuation Performance of Circular Expansion
4
Chambers with Offset Inlet/Outlet”, el cual se divide en dos partes; en la primera parte, Selamet
desarrolla de forma analítica el problema y encuentra cómo es el comportamiento de los
silenciadores tanto en una solución unidimensional y los compara con resultados analíticos
tridimensionales, donde concluye que las aproximaciones unidimensionales no son acertadas para
cámaras muy cortas o largas [8]; En la segunda parte, Selamet realiza una comparación de su
trabajo previo con pruebas experimentales y encuentra que el comportamiento es bastante
similar al pronosticado en su análisis [9]. De la misma forma, Selamet también tuvo la libertad para
hacer análisis para cámaras de expansión en que la entrada y salida de la cámara no se
encontraran sobre el mismo plano, en el cual también obtuvo resultados similares a los obtenidos
por simulación [9].
MARCO TEÓRICO
Atenuador de Sonido Un atenuador de sonido o silenciador es un dispositivo que por medio de propiedades
geométricas o del material disminuyen la intensidad de sonido generadas por una fuente [10]. De
la misma forma, dependiendo del comportamiento que tiene el atenuador este se puede clasificar
dentro de dos categorías, silenciadores disipativos y reactivos:
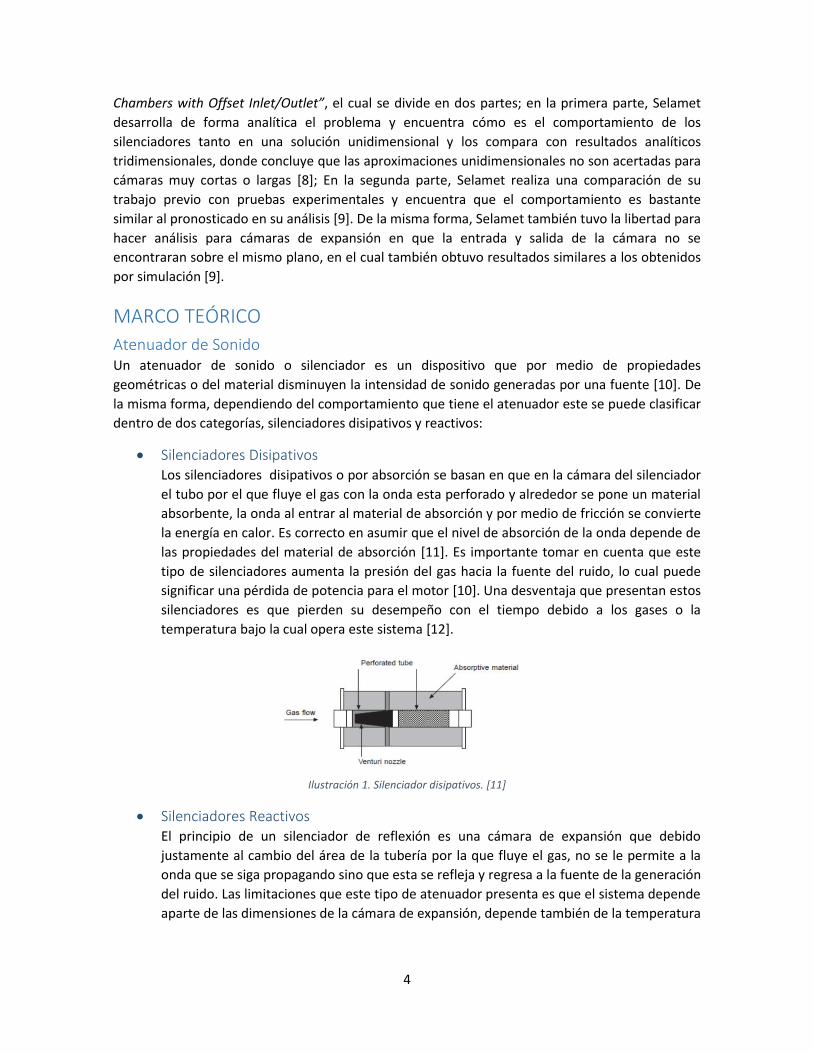
Silenciadores Disipativos Los silenciadores disipativos o por absorción se basan en que en la cámara del silenciador
el tubo por el que fluye el gas con la onda esta perforado y alrededor se pone un material
absorbente, la onda al entrar al material de absorción y por medio de fricción se convierte
la energía en calor. Es correcto en asumir que el nivel de absorción de la onda depende de
las propiedades del material de absorción [11]. Es importante tomar en cuenta que este
tipo de silenciadores aumenta la presión del gas hacia la fuente del ruido, lo cual puede
significar una pérdida de potencia para el motor [10]. Una desventaja que presentan estos
silenciadores es que pierden su desempeño con el tiempo debido a los gases o la
temperatura bajo la cual opera este sistema [12].
Ilustración 1. Silenciador disipativos. [11]
Silenciadores Reactivos El principio de un silenciador de reflexión es una cámara de expansión que debido
justamente al cambio del área de la tubería por la que fluye el gas, no se le permite a la
onda que se siga propagando sino que esta se refleja y regresa a la fuente de la generación
del ruido. Las limitaciones que este tipo de atenuador presenta es que el sistema depende
aparte de las dimensiones de la cámara de expansión, depende también de la temperatura

5
y de la velocidad del flujo del gas dentro del sistema [10]. Este tipo de silenciadores
tienden a ser más efectivos con tonos discretos a baja frecuencia [13].
Ilustración 2. Silenciador reactivo. [11]
Unidades de medición del sonido En orden para caracterizar atenuadores de sonido es necesario definir una serie de unidades que
señalen la energía acústica que pasa por un medio, la primera de estas unidades es la intensidad
acústica, la cual se define como el promedio del producto entre la presión y la componente de la
velocidad normal [12].
𝐼 = 𝑝(𝑡)𝑢𝑛(𝑡)̅̅ ̅̅ ̅̅ ̅̅ ̅̅ ̅̅ ̅ Ecuación 1. Intensidad acústica. [12]
De la intensidad acústica se puede hallar la potencia total acústica emitida por una fuente
integrando la intensidad acústica sobre una superficie [12]:
𝑊 = ∮ 𝐼 𝑑𝑆
Ecuación 2. Potencia acústica. [12]
Generalmente, estas unidades debido a sus propiedades se tienden a medir con sus funciones
logarítmicas correspondientes. Siguiendo la idea anterior, las mediciones de presión acústica se
hacen con SPL (nivel de presión de sonido por sus cifras en inglés), la intensidad acústica se mide
con nivel de intensidad y la potencia acústica con nivel de potencia tal como se muestra en las
ecuaciones 3, 4 y 5.
𝑆𝑃𝐿 = 20 log𝑃𝑟𝑚𝑠 𝑁/𝑚2
2 × 10−5 𝑁/𝑚2 𝑑𝐵
Ecuación 3. SPL. [12]
𝐼𝐼 = 10 log𝐼 𝑊/𝑚2
10−12 𝑊/𝑚2 (𝑑𝐵)
Ecuación 4. Nivel de intensidad. [12]
𝐿𝑊 = 10 log𝑊 𝑊
10−12 𝑊 (𝑑𝐵)
Ecuación 5. Nivel de Potencia. [12]
Las unidades mencionadas previamente se usan para medir la energía acústica en cualquier
medio, sin embargo, en el caso de medir la energía a través de una tubería es necesario definir la
impedancia acústica, la cual se define como la relación entre la presión acústica y la velocidad de
masa acústica correspondiente a la misma onda: [12]

6
𝑌 =𝑝𝑟𝑒𝑠𝑖ó𝑛 𝑎𝑐𝑢𝑠𝑡𝑖𝑐𝑎 𝑟𝑒𝑙𝑎𝑐𝑖𝑜𝑛𝑎𝑑𝑎 𝑐𝑜𝑛 𝑢𝑛𝑎 𝑜𝑛𝑑𝑎 𝑝𝑟𝑜𝑔𝑟𝑒𝑠𝑖𝑣𝑎
𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝑑𝑒 𝑚𝑎𝑠𝑎 𝑎𝑐𝑢𝑠𝑡𝑖𝑐𝑎 𝑟𝑒𝑙𝑎𝑐𝑖𝑜𝑛𝑎𝑑𝑎 𝑐𝑜𝑛 𝑢𝑛𝑎 𝑜𝑛𝑑𝑎 𝑝𝑟𝑜𝑔𝑟𝑒𝑠𝑖𝑣𝑎
Ecuación 6. Impedancia Acústica. [12]
Parámetros de desempeño de atenuadores de sonido Existen diferentes parámetros que se usan para medir el desempeño de los silenciadores. Sin
embargo, no todos estos parámetros dependen únicamente de las propiedades físicas del
silenciador sino que también se relacionan con características de la fuente de sonido u otros
parámetros ambientales. Ahora se muestran los parámetros más comúnmente usados tanto en
modelos computacionales como experimentalmente:
Transmission Loss: La pérdida de transmisión (Transmission Loss o TL como se llamara de
ahora en adelante) es un parámetro que depende únicamente del silenciador, razón por la
cual es el más común en usarse, además, este parámetro es fácil de calcular en los
modelos computacionales pero difícil de medir experimentalmente [6], sin embargo, se ha
hecho un largo estudio sobre métodos para medir este parámetro. TL se define como la
diferencia entre la potencia acústica de entrada al silenciador y la transmitida a la salida.
Cabe resaltar que es necesario tener una terminación anecoica (es decir que no existe
reflexión de la onda) al final del mecanismo para medir este parámetro tanto
computacionalmente como experimentalmente [12].
𝑇𝐿 = 𝐿𝑊𝑖 − 𝐿𝑊𝑡 Ecuación 7. Perdida de transmisión. [12]
Insertion Loss: La pérdida de inserción (IL como se le referirá de ahora en adelante) se
define como la diferencia de potencia acústica entre el sistema sin el silenciador y con el
silenciador [12]. Este parámetro es fácil de medir pero difícil de calcular, sin embargo,
debido a su definición es el parámetro que mejor puede señalar el desempeño de un
silenciador [6]. Hay que tomar en cuenta que este parámetro también depende de la
impedancia de la fuente.
𝐼𝐿 = 𝐿𝑊1 − 𝐿𝑊2 Ecuación 8. Perdida de inserción. [12]
Noise Reduction: La reducción de ruido (NR de ahora en adelante) se define como la
diferencia en la presión del sonido en dos puntos arbitrarios en el tubo de entrada y salida
del atenuador de sonido [12]. Este parámetro tiene la ventaja de que a diferencia del TL,
este no requiere de una terminación anecoica para poder medirse [12], sin embargo, a
pesar de que este parámetro es fácil de medir es difícil de calcular [6].
𝑁𝑅 = 20 log |𝑃𝑛
𝑃1|
Ecuación 9. Reducción de Ruido. [12]
Como se vio anteriormente, IL es el parámetro que mejor señala el desempeño de un silenciador,
sin embargo toca tomar en cuenta que este también se ve afectado por la impedancia de la fuente
que genera la onda. Por el otro lado, TL no depende de la fuente incidente al silenciador, sin
embargo, como se ha discutido anteriormente requiere de terminaciones anecoicas y un laborioso
7
procesamiento de datos. Finalmente, NR tiene la ventaja de que no requiere una terminación
anecoica, lo cual en casos de que se desee corroborar experimentalmente el comportamiento de
un silenciador este tiende a ser bastante útil.
Durante este proyecto el parámetro que se buscara analizar será TL debido a que este es fácil de
evaluar computacionalmente y se facilitara la comparación. Además, gracias al banco de pruebas
(se mostrara más adelante) varios de los requerimientos para medir TL podrán eliminarse debido a
al tipo de banco de pruebas.
Desarrollo físico y matemático
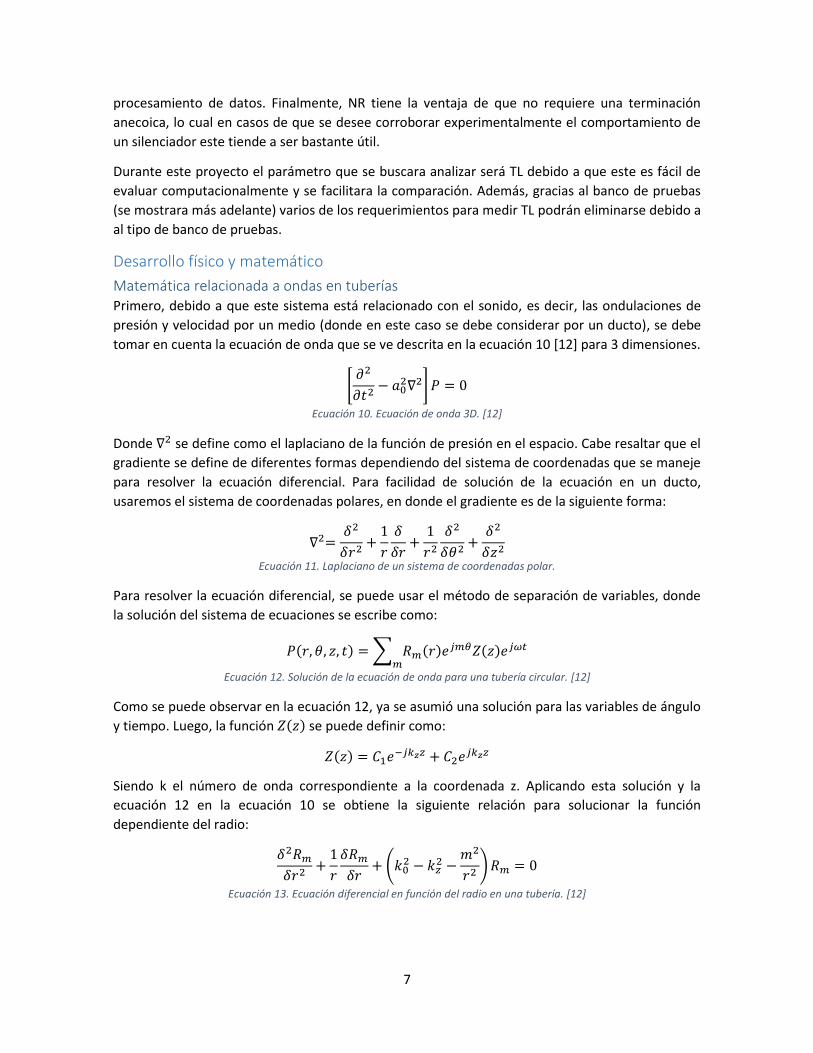
Matemática relacionada a ondas en tuberías Primero, debido a que este sistema está relacionado con el sonido, es decir, las ondulaciones de
presión y velocidad por un medio (donde en este caso se debe considerar por un ducto), se debe
tomar en cuenta la ecuación de onda que se ve descrita en la ecuación 10 [12] para 3 dimensiones.
[𝜕2
𝜕𝑡2− 𝑎0
2∇2] 𝑃 = 0
Ecuación 10. Ecuación de onda 3D. [12]
Donde ∇2 se define como el laplaciano de la función de presión en el espacio. Cabe resaltar que el
gradiente se define de diferentes formas dependiendo del sistema de coordenadas que se maneje
para resolver la ecuación diferencial. Para facilidad de solución de la ecuación en un ducto,
usaremos el sistema de coordenadas polares, en donde el gradiente es de la siguiente forma:
∇2=𝛿2
𝛿𝑟2+
1
𝑟
𝛿
𝛿𝑟+
1
𝑟2
𝛿2
𝛿𝜃2+
𝛿2
𝛿𝑧2
Ecuación 11. Laplaciano de un sistema de coordenadas polar.
Para resolver la ecuación diferencial, se puede usar el método de separación de variables, donde
la solución del sistema de ecuaciones se escribe como:
𝑃(𝑟, 𝜃, 𝑧, 𝑡) = ∑ 𝑅𝑚(𝑟)𝑒𝑗𝑚𝜃𝑍(𝑧)𝑒𝑗𝜔𝑡
𝑚
Ecuación 12. Solución de la ecuación de onda para una tubería circular. [12]
Como se puede observar en la ecuación 12, ya se asumió una solución para las variables de ángulo
y tiempo. Luego, la función 𝑍(𝑧) se puede definir como:
𝑍(𝑧) = 𝐶1𝑒−𝑗𝑘𝑧𝑧 + 𝐶2𝑒𝑗𝑘𝑧𝑧
Siendo k el número de onda correspondiente a la coordenada z. Aplicando esta solución y la
ecuación 12 en la ecuación 10 se obtiene la siguiente relación para solucionar la función
dependiente del radio:
𝛿2𝑅𝑚
𝛿𝑟2+
1
𝑟
𝛿𝑅𝑚
𝛿𝑟+ (𝑘0
2 − 𝑘𝑧2 −
𝑚2
𝑟2 ) 𝑅𝑚 = 0
Ecuación 13. Ecuación diferencial en función del radio en una tubería. [12]

8
Donde ko está relacionado con la solución de la ecuación en un sistema de coordenadas
cartesianas. Nótese que la ecuación anterior corresponde a la ecuación de Bessel, cuya función se
define como la función de Bessel y tiene la siguiente forma:
𝐽𝑚(𝑘𝑟𝑟) =(−1)𝑚 (
𝑟2
)𝑘𝑟+2𝑚
𝑚! Γ(𝑘𝑟 + 𝑚 + 1) 𝑠𝑖𝑒𝑛𝑑𝑜 𝑘𝑟
2 = 𝑘02 − 𝑘𝑧
2
Ecuación 14. Función de Bessel. [14]
Como se puede observar en la ecuación 14, se pueden desarrollar dos soluciones para la función
del radio para cada signo de la raíz de 𝑘𝑟. De esta forma, la solución de la ecuación de Bessel
queda escrita como:
𝑅𝑚(𝑟) = 𝐶3𝐽𝑚(𝑘𝑟𝑟) + 𝐶4𝑁𝑚(𝑘𝑟𝑟) Ecuación 15. Solución a la ecuación de Bessel. [12]
Correspondiendo 𝑁𝑚(𝑘𝑟𝑟) la segunda solución de la ecuación de Bessel. Lo siguiente que se
realiza es entonces evaluar la función en las condiciones de frontera, donde en el punto de 𝑟 = 0
se tiene que la función 𝑁𝑚(𝑘𝑟𝑟) tiende a infinito, al ser esto físicamente imposible se obtiene que
la constante 𝐶4 es 0. Luego, se hallan los valores del coeficiente 𝑘𝑟 en para que se cumpla la
siguiente condición de frontera:
𝛿𝐽(𝑘𝑟𝑟)
𝛿(𝑘𝑟𝑟)|
𝑟=𝑟𝑜
= 0
Ecuación 16. Segunda condición de frontera para ecuación del radio.
La anterior condición de frontera se refiere al hecho de que existe la pared de la tubería y esta no
permite un cambio de presión en este punto, sino que debe permanecer constante. Al final la
solución de la ecuación de onda en una tubería circular queda escrita como:
𝑃(𝑟, 𝜃, 𝑧, 𝑡) = ∑ ∑ 𝐽𝑚(𝑘𝑟,𝑚,𝑛)𝑒𝑗𝑚𝜃𝑒𝑗𝜔𝑡(𝐶1,𝑚,𝑛𝑒−𝑗𝑘𝑧,𝑚,𝑛𝑧 + 𝐶2,𝑚,𝑛𝑒𝑗𝑘𝑧,𝑚,𝑛𝑧)
∞
𝑛=1
∞
𝑚=0
Ecuación 17. Solución de la ecuación de onda en tubería circular. [12]
Lo siguiente a analizar es el comportamiento de la velocidad de las partículas, donde podemos
encontrar una relación entre la presión y la velocidad de la ecuación de equilibrio dinámico que se
muestra a continuación:
𝜌𝑜
𝛿𝑢𝑧
𝛿𝑡+
𝛿𝑃
𝛿𝑧= 0
Ecuación 18. Ecuación de equilibrio dinámico en dirección axial. [12]
Al despejar la velocidad se llega a la ecuación de velocidad que se muestra a continuación:
𝑢𝑧,𝑚,𝑛 = −𝛿𝑝/𝛿𝑧
𝑗𝜔𝜌𝑜
𝑢𝑧,𝑚,𝑛 = 𝐽𝑚(𝑘𝑟,𝑚,𝑛𝑟)𝑒𝑗𝑚𝜃𝑒𝑗𝜔𝑡𝑘𝑧,𝑚,𝑛
𝑘𝑜𝜌𝑜𝑎𝑜× [𝐶1,𝑚,𝑛𝑒−𝑗𝑘𝑧,𝑚,𝑛𝑧 + 𝐶2,𝑚,𝑛𝑒𝑗𝑘𝑧,𝑚,𝑛𝑧]
Ecuación 19. Ecuación de velocidad en una tubería circular. [12]

9
Las soluciones mostradas anteriormente aún no toman en cuenta la propiedad de viscosidad del
fluido. Para tomar la viscosidad en cuenta, dentro del planteamiento del sistema de ecuaciones se
agrega la ecuación de Navier-Stokes que se muestra a continuación:
𝜌0
𝜕𝑢𝑠
𝜕𝑡+
𝜕𝑃
𝜕𝑧= 𝑢 (
𝜕2𝑢𝑧
𝜕𝑟2+
1
𝑟
𝜕𝑢𝑧
𝜕𝑟+
𝜕2𝑢𝑧
𝜕𝑧2 ) +𝜇
3(
𝜕2𝑢𝑟
𝜕𝑟𝜕𝑧+
1
𝑟
𝜕𝑢𝑟
𝜕𝑧+
𝜕2𝑢𝑧
𝜕𝑧2 )
Ecuación 20. Ecuación de Navier-Stokes. [12]
El desarrollo de este sistema de ecuaciones es bastante similar al mostrado anteriormente con la
diferencia de cambio de coeficientes dentro de la exponencial que corresponde a la función de
dirección axial, llevando después de un desarrollo algebraico complejo a la siguiente ecuación de
presión:
𝑃 = −𝜌𝑜𝑎𝑜
2𝛽
𝜔𝐴1𝐽𝑜(𝐶1𝑎)𝑒𝑗𝜔𝑡𝑒−𝑗𝛽𝑧
Ecuación 21. Solución de la ecuación de presión incluyendo la viscosidad. [12]
Siendo la variable 𝛽 un número complejo. Nótese que en la ecuación anterior se obtiene que la
presión no dependa de la dirección radial sino únicamente de la dirección axial. Con este
resultado, se puede reescribir las ecuaciones de velocidad y presión usando la impedancia de la
siguiente forma:
𝑝 = 𝐴𝑒−𝑗𝑘𝑜𝑧 + 𝐵𝑒𝑗𝑘𝑜𝑧 𝑢 =1
𝑌𝑜(𝐴𝑒−𝑗𝑘𝑜𝑧 − 𝐵𝑒𝑗𝑘𝑜𝑧)
Ecuación 22-23.Ecuaciones de velocidad y presión escritas de forma simplificada
Donde los coeficientes del tiempo quedan dentro de los Coeficientes A y B, de la misma forma, los
coeficientes de impedancia y número de onda se calculan de la siguientes forma:
𝑌𝑜 =𝑎𝑜
𝑆 𝑘𝑜 =
𝜔
𝑎𝑜
Luego, la impedancia para cualquier punto axial se define como:
𝜁(𝑧) =𝑃(𝑧)
𝑢(𝑧)= 𝑌𝑜
𝐴𝑒−𝑗𝑘𝑜𝑧 + 𝐵𝑒𝑗𝑘𝑜𝑧
𝐴𝑒−𝑗𝑘𝑜𝑧 − 𝐵𝑒𝑗𝑘𝑜𝑧
Donde para deshacernos de las variables A y B se hallan los valores de impedancia en las fronteras
de la tubería:
𝜁(0) = 𝑌𝑜
𝐴 + 𝐵
𝐴 − 𝐵 𝜁(𝑙) = 𝑌𝑜
𝐴𝑒−𝑗𝑘𝑜𝑙 + 𝐵𝑒𝑗𝑘𝑜𝑙
𝐴𝑒−𝑗𝑘𝑜𝑙 − 𝐵𝑒𝑗𝑘𝑜𝑙
Donde al combinar las dos expresiones y usando la relación de Fourier de exponenciales complejos
se llega a la expresión:
𝜁(0) =𝜁(𝑙) cos 𝑘𝑜𝑙 + 𝑗𝑌𝑜 sin 𝑘𝑜𝑙
𝑗𝜁(𝑙)𝑌𝑜
sin 𝑘𝑜𝑙 + cos 𝑘𝑜𝑙

10
Otro elemento que se usa para analizar el comportamiento acústico es el coeficiente de reflexión,
que usualmente se define en términos de su amplitud y fase como:
𝑅 = |𝑅|𝑒𝑗𝜃 Ecuación 24. Definición coeficiente de reflexión. [12]
Donde en sus condiciones de frontera el coeficiente se expresa como:
𝑅(0) =𝐵
𝐴 𝑅(𝑙) =
𝐵𝑒𝑗𝑘𝑜𝑙
𝐴𝑒−𝑗𝑘𝑜𝑙
Donde se puede relacionar la impedancia y el coeficiente de reflexión como:
𝜁 = 𝑌𝑜
1 + 𝑅
1 − 𝑅 𝑅 =
𝜁 − 𝑌𝑜
𝜁 + 𝑌𝑜
Ecuación 25. Relación entre el coeficiente de Reflexión y la impedancia. [12]
Desarrollo matemático sobre cámaras de expansión Consideremos una sección de cambio de área donde vamos a evaluar la impedancia en dos puntos
con una distancia muy pequeña entre ellos como se muestra en la siguiente imagen:
Ilustración 3. Sección de cambio de área.
Al ser los puntos 1 y 2 tan cercanos se puede considerar que en ambos puntos las presiones y las
velocidades son las mismas, por lo tanto, la impedancia se conserva. Ahora, el coeficiente de
reflexión en el punto 1 se escribe como:
𝑅1 =𝜁1 − 𝑌1
𝜁1 + 𝑌1=
𝑌2 − 𝑌1
𝑌2 + 𝑌1=
𝑆1 − 𝑆2
𝑆1 + 𝑆2
Ecuación 26. Coeficiente de reflexión para un cambio de área simple. [12]
Donde se obtiene que dependiendo si es una contracción o una expansión se obtendrá un
coeficiente de expansión positivo o negativo respectivamente.
Ahora para calcular la pérdida de transmisión, se calcula el flujo neto de energía en cada uno de
los puntos, donde asumiendo que se tiene una terminación anecoica y usando los coeficientes de
las amplitudes de las ecuaciones de presión se llegan a las siguientes expresiones:
𝑊1 = 𝑊𝑖 − 𝑊𝑟 =|𝐴1
2| − |𝐵12|
2𝜌𝑜𝑌1 𝑊2 = 𝑊𝑡 =
|𝐴22|
2𝜌𝑜𝑌1

11
Luego, conociendo que las energías en ambos puntos son iguales, la pérdida de transmisión queda
escrita como:
𝑇𝐿 = 10 log𝑊𝑖
𝑊𝑖 − 𝑊𝑟= 10 log
1
1 − 𝑅12 = 10 log
(𝑆1 + 𝑆2)2
4𝑆1𝑆2
Ecuación 27. TL para un cambio de sección de área. [12]
Como se puede observar en la ecuación 27 la pérdida de transmisión depende únicamente de las
áreas, sin embargo, este cálculo corresponde únicamente del primer cambio de área, al realizarse
el mismo desarrollo para una cámara de expansión, donde se tienen dos cambios de área,
asumiendo que el área a la entrada y salida de la cámara es la misma entonces se llega a la
siguiente expresión:
𝑇𝐿 = 10 log (1 + (𝑆1
2𝑆2−
𝑆2
2𝑆1)
2
sin2 𝑘𝑙)
Ecuación 28. TL para una cámara de expansión. [13]
En este caso, aparece la variable del número de onda que a su vez depende de la frecuencia, de
esta forma, podemos predecir el comportamiento de la cámara de expansión en términos de la
frecuencia de la onda.
Serie de Fourier La serie de Fourier es un método que descubrió Joseph Fourier por el cual cualquier serie
periódica puede ser escrita como la sumatoria de funciones periódicas simples tal como se
muestra en la siguiente ecuación:
𝑓(𝑥) =1
2𝐴0 ∑(𝐴𝑛 cos 𝑛𝑥 + 𝐵𝑛 sin 𝑛𝑥)
∞
𝑛=0
Ecuación 29. Serie de Fourier. [15]
Donde los coeficientes 𝐴0, 𝐴𝑛 y 𝐵𝑛 se pueden hallar por medio de las siguientes ecuaciones:
𝐴𝑛 =1
𝜋∫ 𝑓(𝑥) cos(𝑛𝑥) 𝑑𝑥
𝜋
−𝜋
𝐵𝑛 =1
𝜋∫ 𝑓(𝑥) sin(𝑛𝑥) 𝑑𝑥
𝜋
−𝜋
Ecuación 30-31. Coeficientes de Fourier. [15]
Generalmente, en aplicaciones de manejo de datos n es remplazado por la frecuencia de la onda,
esto permite que se pueda graficar estos coeficientes en términos de la frecuencia de la onda y se
obtiene un espectro de frecuencias, el cual indica la predominancia de algunas frecuencias sobre
otras en cualquier tipo de onda. Cabe resaltar que la ecuación 29 asume que la onda es continua y
periódica en un intervalo de – 𝜋 a 𝜋, lo cual debe de ser ajustado a la longitud de los datos que se
desee. En otras palabras, las ecuaciones 30 y 31 están para aplicarse a funciones continuas, en el
caso de funciones discretas, la ecuación queda reescrita de la siguiente forma:
𝐴𝑛 =1
𝑁∑ 𝑦(𝑟Δ𝑡) cos (
2𝜋𝑟𝑛
𝑁) 𝑑𝑡 𝐵𝑛 =
1
𝑁∑ 𝑦(𝑟Δ𝑡) sin (
2𝜋𝑟𝑛
𝑁)
Ecuación 32-33. Coeficientes de Fourier discretos.
12
Otra forma de obtener estos coeficientes es por medio del uso de notaciones complejas, en este
caso, la ecuación 29 queda escrita de la siguiente forma:
𝑓(𝑥) = ∑ 𝛼𝑛𝑒𝑖𝑛𝑥
∞
𝑛=0
Ecuación 34. Serie de Fourier en notación compleja. [15]
El programa de Matlab ofrece una función fft (transformada rápida de Fourier por sus siglas en
inglés) que calcula los coeficientes de la serie de Fourier de forma compleja como en la ecuación
34, tomando esto en cuenta, durante este proyecto en el análisis de datos se usara esta función
para facilitar el cálculo de TL desde los datos de onda obtenidos en el banco de pruebas.
PROCEDIMIENTO Con el objetivo de caracterizar el comportamiento de un atenuador de sonido de cámara de
expansión, se diseñó un adecuado banco de pruebas. A continuación, mostramos las fases de
diseño y realización de pruebas realizadas durante el proyecto.
Selección del banco de pruebas Para poder caracterizar el TL se han diseñado distintos bancos de pruebas, varios de los cuales Tao
habla en su documento y relaciona las ventajas y desventajas de estos [4]. Estas técnicas de
medición de TL son el método de descomposición, el método de dos fuentes y el método de dos
cargas, ahora se hablara sobre en qué consiste cada uno de estos:
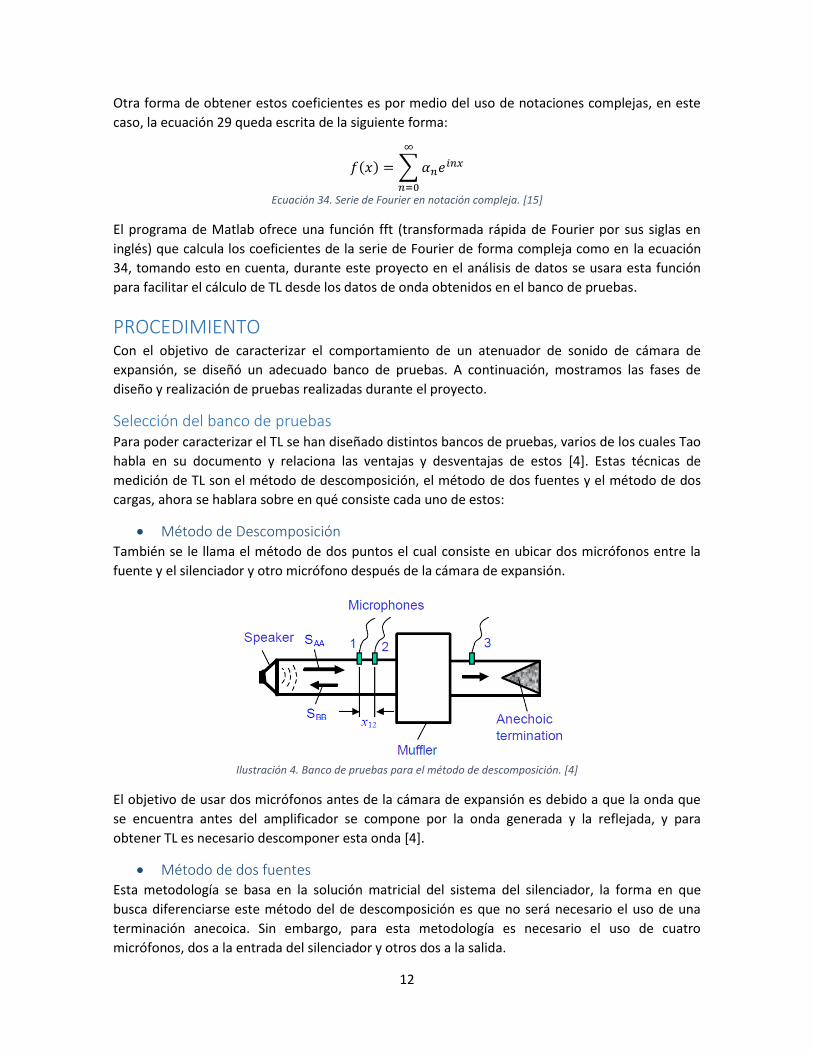
Método de Descomposición También se le llama el método de dos puntos el cual consiste en ubicar dos micrófonos entre la
fuente y el silenciador y otro micrófono después de la cámara de expansión.
Ilustración 4. Banco de pruebas para el método de descomposición. [4]
El objetivo de usar dos micrófonos antes de la cámara de expansión es debido a que la onda que
se encuentra antes del amplificador se compone por la onda generada y la reflejada, y para
obtener TL es necesario descomponer esta onda [4].
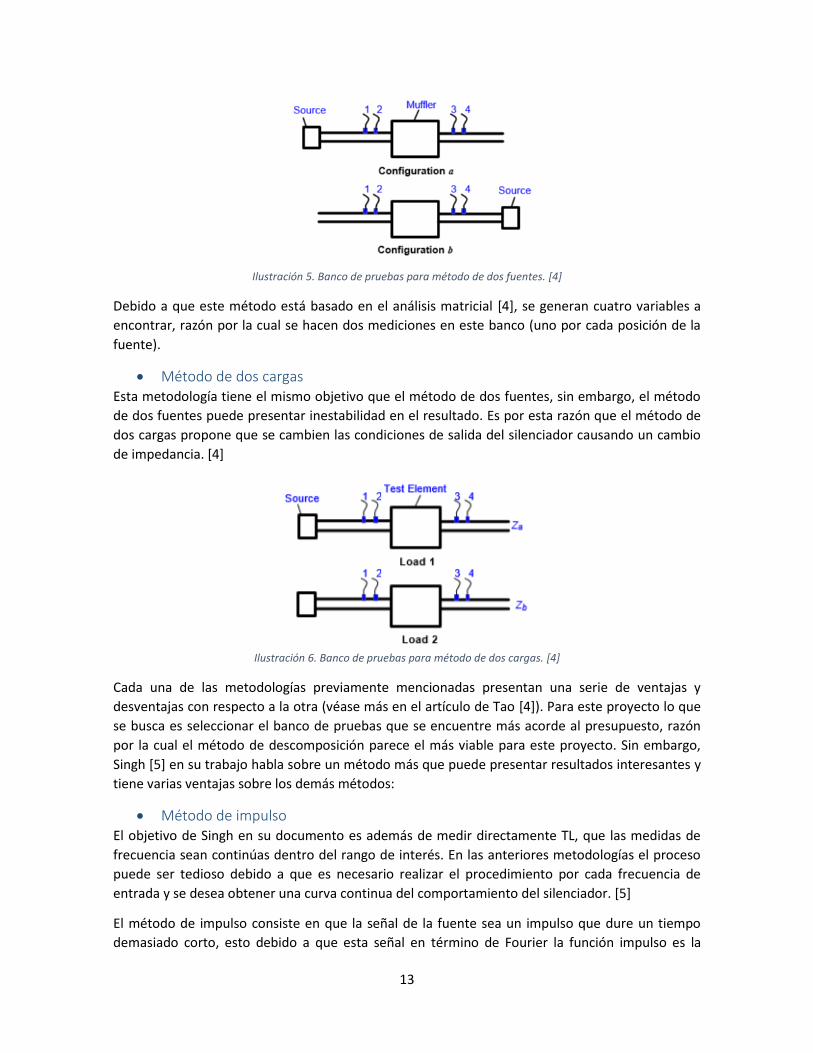
Método de dos fuentes Esta metodología se basa en la solución matricial del sistema del silenciador, la forma en que
busca diferenciarse este método del de descomposición es que no será necesario el uso de una
terminación anecoica. Sin embargo, para esta metodología es necesario el uso de cuatro
micrófonos, dos a la entrada del silenciador y otros dos a la salida.
13
Ilustración 5. Banco de pruebas para método de dos fuentes. [4]
Debido a que este método está basado en el análisis matricial [4], se generan cuatro variables a
encontrar, razón por la cual se hacen dos mediciones en este banco (uno por cada posición de la
fuente).
Método de dos cargas Esta metodología tiene el mismo objetivo que el método de dos fuentes, sin embargo, el método
de dos fuentes puede presentar inestabilidad en el resultado. Es por esta razón que el método de
dos cargas propone que se cambien las condiciones de salida del silenciador causando un cambio
de impedancia. [4]
Ilustración 6. Banco de pruebas para método de dos cargas. [4]
Cada una de las metodologías previamente mencionadas presentan una serie de ventajas y
desventajas con respecto a la otra (véase más en el artículo de Tao [4]). Para este proyecto lo que
se busca es seleccionar el banco de pruebas que se encuentre más acorde al presupuesto, razón
por la cual el método de descomposición parece el más viable para este proyecto. Sin embargo,
Singh [5] en su trabajo habla sobre un método más que puede presentar resultados interesantes y
tiene varias ventajas sobre los demás métodos:
Método de impulso El objetivo de Singh en su documento es además de medir directamente TL, que las medidas de
frecuencia sean continúas dentro del rango de interés. En las anteriores metodologías el proceso
puede ser tedioso debido a que es necesario realizar el procedimiento por cada frecuencia de
entrada y se desea obtener una curva continua del comportamiento del silenciador. [5]
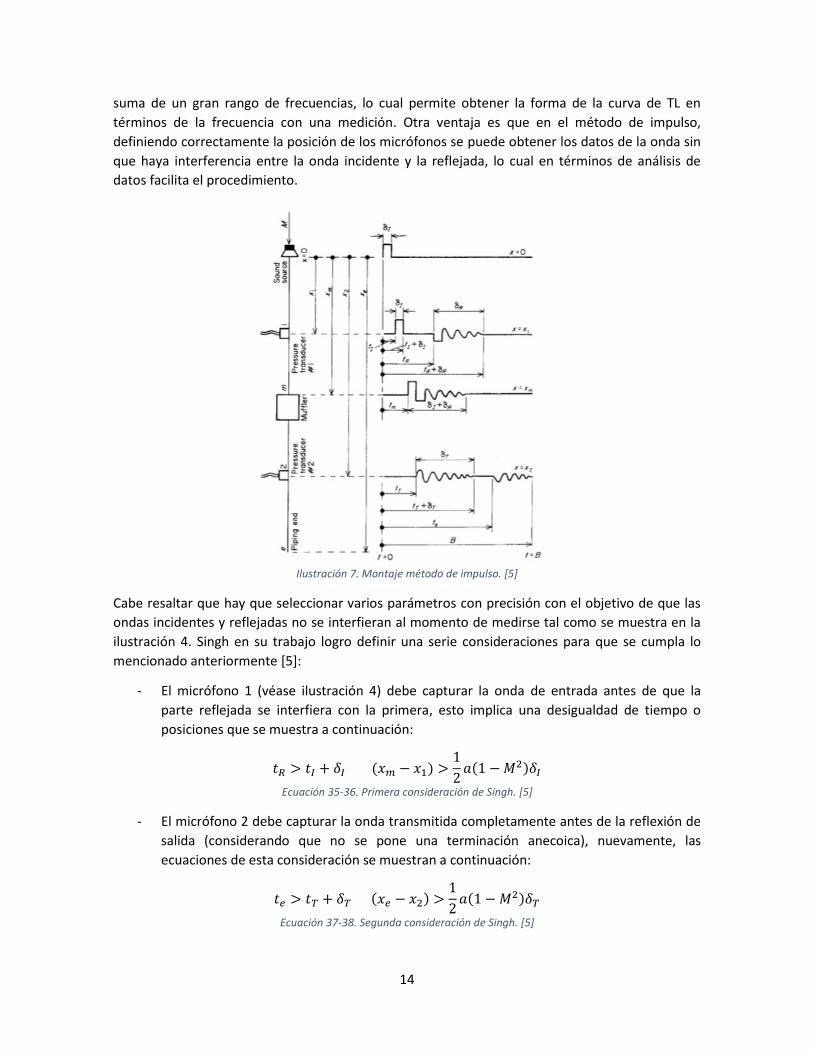
El método de impulso consiste en que la señal de la fuente sea un impulso que dure un tiempo
demasiado corto, esto debido a que esta señal en término de Fourier la función impulso es la
14
suma de un gran rango de frecuencias, lo cual permite obtener la forma de la curva de TL en
términos de la frecuencia con una medición. Otra ventaja es que en el método de impulso,
definiendo correctamente la posición de los micrófonos se puede obtener los datos de la onda sin
que haya interferencia entre la onda incidente y la reflejada, lo cual en términos de análisis de
datos facilita el procedimiento.
Ilustración 7. Montaje método de impulso. [5]
Cabe resaltar que hay que seleccionar varios parámetros con precisión con el objetivo de que las
ondas incidentes y reflejadas no se interfieran al momento de medirse tal como se muestra en la
ilustración 4. Singh en su trabajo logro definir una serie consideraciones para que se cumpla lo
mencionado anteriormente [5]:
- El micrófono 1 (véase ilustración 4) debe capturar la onda de entrada antes de que la
parte reflejada se interfiera con la primera, esto implica una desigualdad de tiempo o
posiciones que se muestra a continuación:
𝑡𝑅 > 𝑡𝐼 + 𝛿𝐼 (𝑥𝑚 − 𝑥1) >1
2𝑎(1 − 𝑀2)𝛿𝐼
Ecuación 35-36. Primera consideración de Singh. [5]
- El micrófono 2 debe capturar la onda transmitida completamente antes de la reflexión de
salida (considerando que no se pone una terminación anecoica), nuevamente, las
ecuaciones de esta consideración se muestran a continuación:
𝑡𝑒 > 𝑡𝑇 + 𝛿𝑇 (𝑥𝑒 − 𝑥2) >1
2𝑎(1 − 𝑀2)𝛿𝑇
Ecuación 37-38. Segunda consideración de Singh. [5]

15
- La longitud de los datos tomados debe ser suficientemente extensa para tomar los datos
de la onda incidente y la onda transmitida. Para esto, Singh define diferentes ecuaciones
para cada uno de los micrófonos:
𝐵 ≥ 𝑡𝑅 + 𝛿𝑇 𝐵 ≥ [(2𝑥𝑚 − 𝑥1(1 + 𝑀))
𝑎(1 − 𝑀2)] + 𝛿𝑅
𝐵 ≥ 𝑡𝑇 + 𝛿𝑇
Para este proyecto, tomando en cuenta la facilidad que puede presentar el método de impulso, la
ventaja que este tiene que evitar el diseño de una terminación anecoica y el poco desarrollo que
este tiene, se diseñó un banco de pruebas para recopilar al banco de pruebas de Singh y se analizó
la viabilidad de este.
Cabe resaltar que existen algunos parámetros que son desconocidos tales como el tiempo que
dura la onda de salida del impulso o de la onda reflejada antes del atenuador. En este caso lo que
se decidió fue estimar un valor para estos y al momento de hacer las pruebas observar que tan
acertada fue la estimación. De la misma forma, el método de impulso a diferencia de los otros
métodos, no está contemplado dentro de normas de pruebas de atenuadores de sonido.
Programas y software Para poder hacer el análisis de los datos de la señal incidente y la transmitida, es necesario
manejar uno o varios programas que obtengan estas señales y permitan examinarlas. Ahora,
debido a que la señal que se desea generar en el parlante no se puede generar fácilmente por un
generador de señales, es necesario generar la señal a través de un software que permita emitir
esta señal en el parlante. Tomando en cuenta lo anterior, se decidió hacer uso del programa
Labview y Audacity para la generación del impulso. De la misma forma, para la verificación de los
parámetros que se requieren en el método de impulso se usó el programa EES (Engineering
Ecuation Solver) y para el tratamiento y análisis de los datos obtenidos se hará uso del programa
MatLab.
EES EES es un programa diseñado para resolver problemas relacionados a la ingeniería en varias áreas
de aplicación, entre estos problemas termodinámicos. Para este proyecto, se usó la herramienta
de EES para hallar valores que dependen de las condiciones de ambiente (la velocidad del sonido
por ejemplo) y verificar los parámetros del método de impulso.
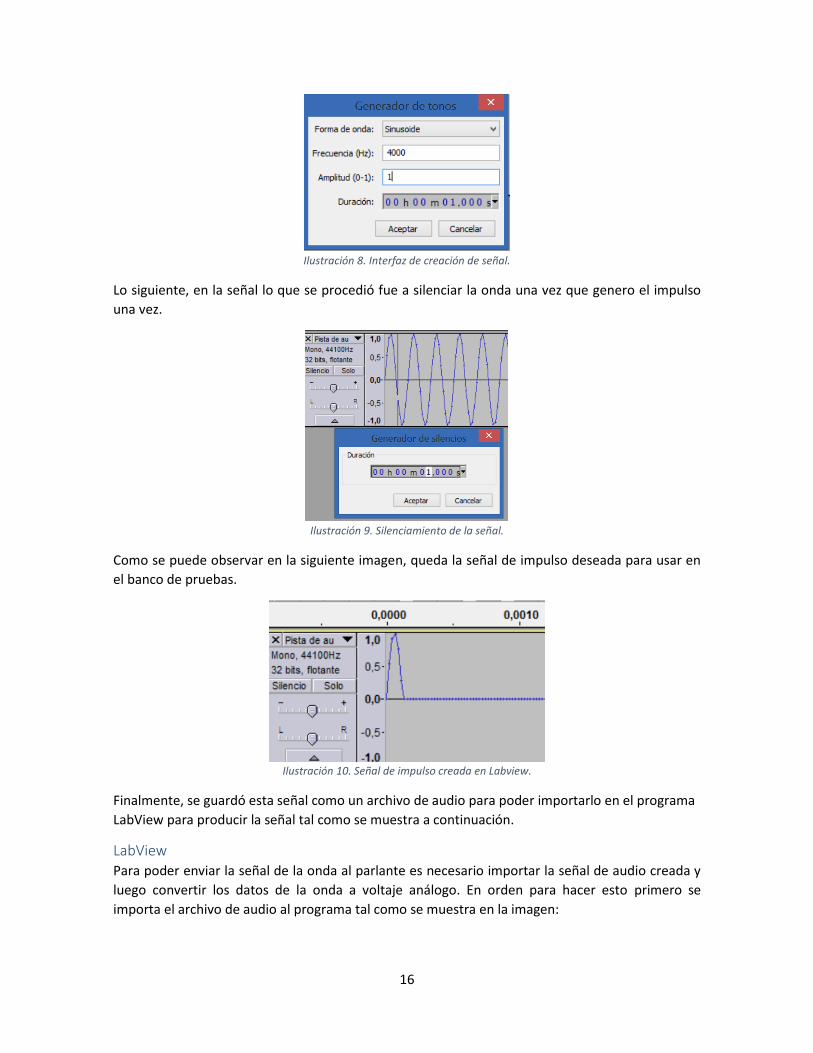
Audacity Audacity es un programa editor de archivos de audio (archivos de tipo .WAV) libre que permite,
crearlos, editarlos y analizarlos. En primera lugar, este programa se utilizó para la creación de la
onda de impulso que se emitirá a través del parlante. Para crear la señal, en la interfaz del
programa se seleccionó la opción de generar una señal con una frecuencia de 4kHz durante un
tiempo de 1 (el tiempo se recomienda que sea mayor o igual al tiempo de muestreo de datos)
segundo tal como se muestra en la siguiente ilustración:
16
Ilustración 8. Interfaz de creación de señal.
Lo siguiente, en la señal lo que se procedió fue a silenciar la onda una vez que genero el impulso
una vez.
Ilustración 9. Silenciamiento de la señal.
Como se puede observar en la siguiente imagen, queda la señal de impulso deseada para usar en
el banco de pruebas.
Ilustración 10. Señal de impulso creada en Labview.
Finalmente, se guardó esta señal como un archivo de audio para poder importarlo en el programa
LabView para producir la señal tal como se muestra a continuación.
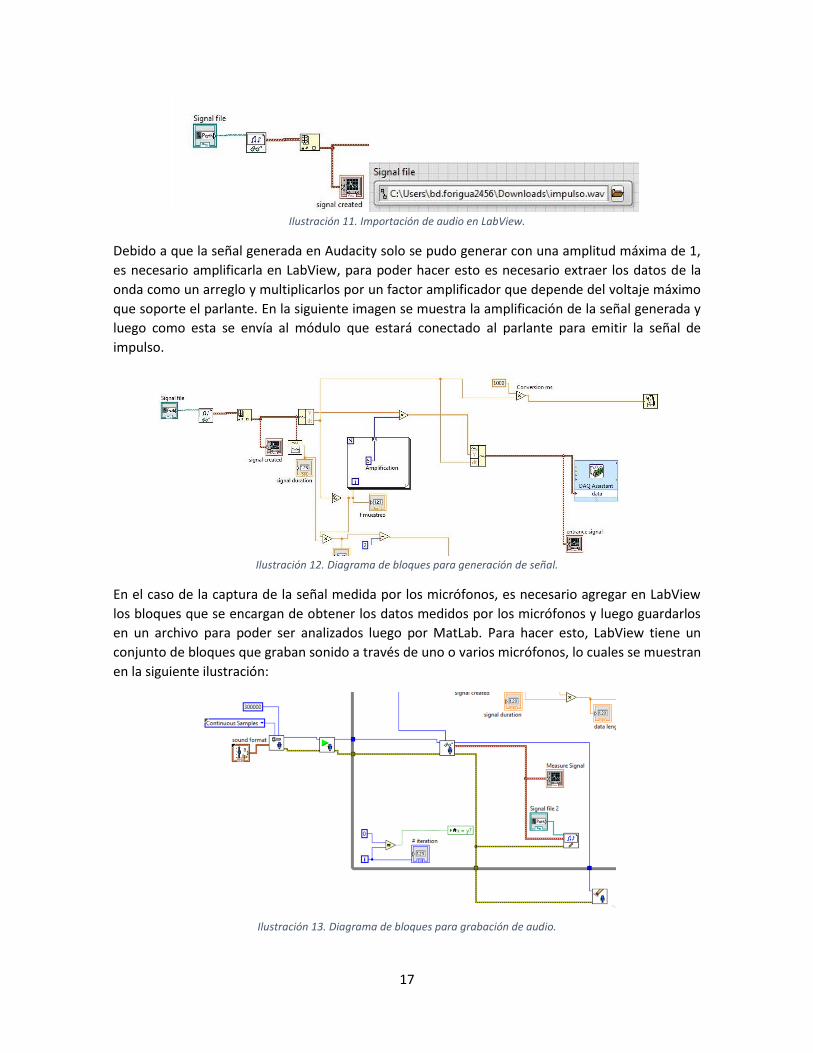
LabView Para poder enviar la señal de la onda al parlante es necesario importar la señal de audio creada y
luego convertir los datos de la onda a voltaje análogo. En orden para hacer esto primero se
importa el archivo de audio al programa tal como se muestra en la imagen:
17
Ilustración 11. Importación de audio en LabView.
Debido a que la señal generada en Audacity solo se pudo generar con una amplitud máxima de 1,
es necesario amplificarla en LabView, para poder hacer esto es necesario extraer los datos de la
onda como un arreglo y multiplicarlos por un factor amplificador que depende del voltaje máximo
que soporte el parlante. En la siguiente imagen se muestra la amplificación de la señal generada y
luego como esta se envía al módulo que estará conectado al parlante para emitir la señal de
impulso.
Ilustración 12. Diagrama de bloques para generación de señal.
En el caso de la captura de la señal medida por los micrófonos, es necesario agregar en LabView
los bloques que se encargan de obtener los datos medidos por los micrófonos y luego guardarlos
en un archivo para poder ser analizados luego por MatLab. Para hacer esto, LabView tiene un
conjunto de bloques que graban sonido a través de uno o varios micrófonos, lo cuales se muestran
en la siguiente ilustración:
Ilustración 13. Diagrama de bloques para grabación de audio.
18
En la ilustración 13 también se puede observar que existe un bloque de carga de archivos
conectada a uno de los bloques. En este caso, lo que hace el bloque al que está conectado es crear
el archivo, o escribir sobre uno ya existente la información capturada por los micrófonos al
momento de correr el programa.
MatLab MatLab es un programa que tiene diferentes funciones de programación útiles para control,
análisis de datos, y realización de simulaciones [16]. Durante este proyecto, el programa de
MatLab se usó para el análisis de los datos capturados por los micrófonos en la realización de las
pruebas.
MatLab dentro de su lenguaje de programación contiene funciones que permiten cargar datos de
archivos de audio como un arreglo de datos. De la misma forma, como se mencionó antes, MatLab
también tiene una función de transformada de Fourier que permite al usuario construir el
espectro de frecuencias de la señal grabada. En el archivo anexo se puede observar el código
utilizado para el análisis de los datos capturados.
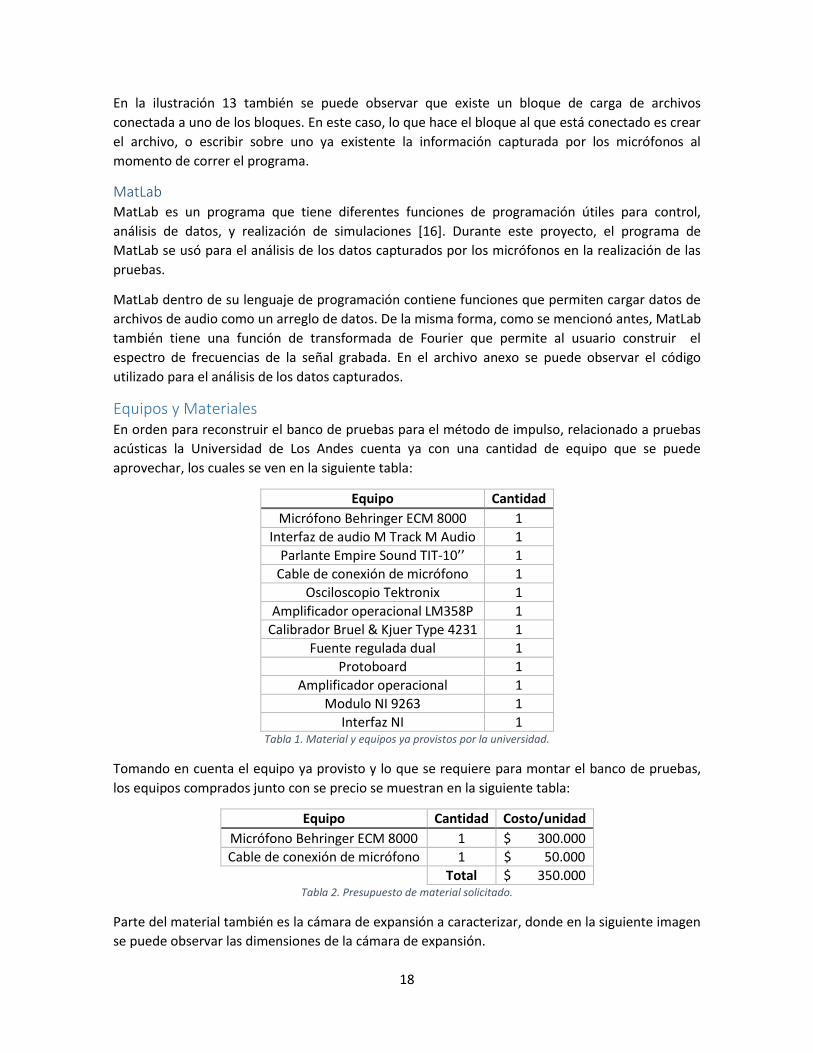
Equipos y Materiales En orden para reconstruir el banco de pruebas para el método de impulso, relacionado a pruebas
acústicas la Universidad de Los Andes cuenta ya con una cantidad de equipo que se puede
aprovechar, los cuales se ven en la siguiente tabla:
Equipo Cantidad
Micrófono Behringer ECM 8000 1
Interfaz de audio M Track M Audio 1
Parlante Empire Sound TIT-10’’ 1
Cable de conexión de micrófono 1
Osciloscopio Tektronix 1
Amplificador operacional LM358P 1
Calibrador Bruel & Kjuer Type 4231 1
Fuente regulada dual 1
Protoboard 1
Amplificador operacional 1
Modulo NI 9263 1
Interfaz NI 1 Tabla 1. Material y equipos ya provistos por la universidad.
Tomando en cuenta el equipo ya provisto y lo que se requiere para montar el banco de pruebas,
los equipos comprados junto con se precio se muestran en la siguiente tabla:
Equipo Cantidad Costo/unidad
Micrófono Behringer ECM 8000 1 $ 300.000
Cable de conexión de micrófono 1 $ 50.000
Total $ 350.000 Tabla 2. Presupuesto de material solicitado.
Parte del material también es la cámara de expansión a caracterizar, donde en la siguiente imagen
se puede observar las dimensiones de la cámara de expansión.
19
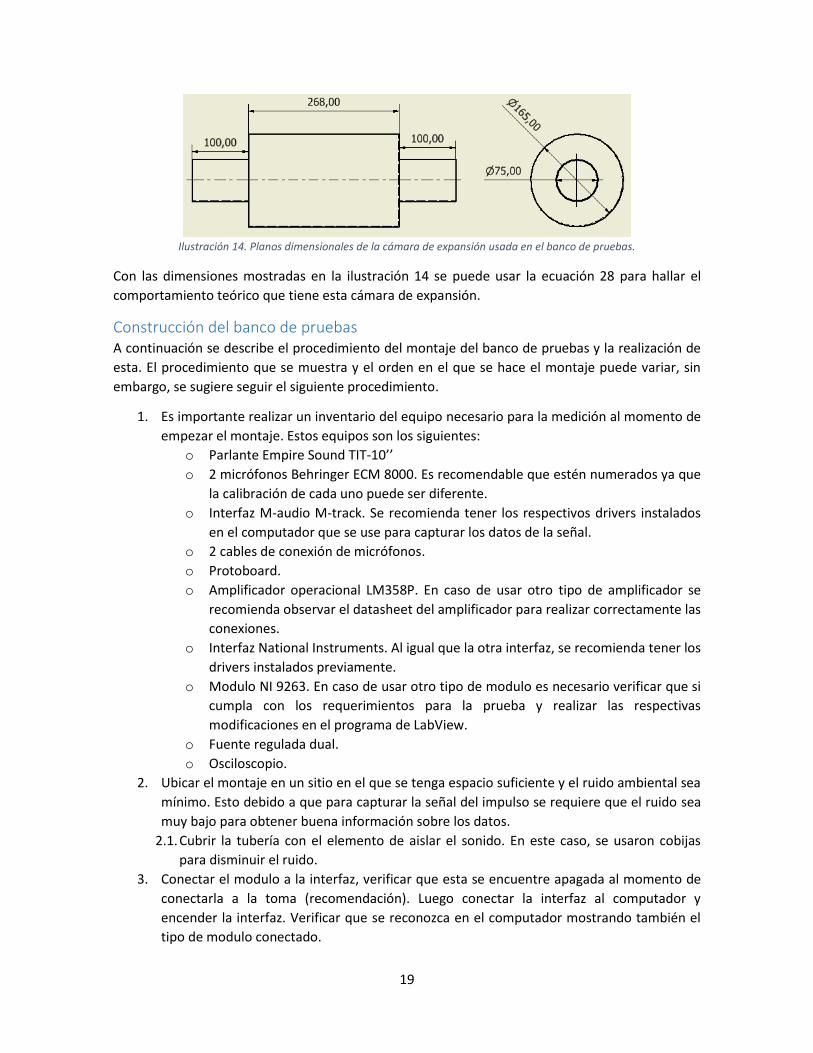
Ilustración 14. Planos dimensionales de la cámara de expansión usada en el banco de pruebas.
Con las dimensiones mostradas en la ilustración 14 se puede usar la ecuación 28 para hallar el
comportamiento teórico que tiene esta cámara de expansión.
Construcción del banco de pruebas A continuación se describe el procedimiento del montaje del banco de pruebas y la realización de
esta. El procedimiento que se muestra y el orden en el que se hace el montaje puede variar, sin
embargo, se sugiere seguir el siguiente procedimiento.
1. Es importante realizar un inventario del equipo necesario para la medición al momento de
empezar el montaje. Estos equipos son los siguientes:
o Parlante Empire Sound TIT-10’’
o 2 micrófonos Behringer ECM 8000. Es recomendable que estén numerados ya que
la calibración de cada uno puede ser diferente.
o Interfaz M-audio M-track. Se recomienda tener los respectivos drivers instalados
en el computador que se use para capturar los datos de la señal.
o 2 cables de conexión de micrófonos.
o Protoboard.
o Amplificador operacional LM358P. En caso de usar otro tipo de amplificador se
recomienda observar el datasheet del amplificador para realizar correctamente las
conexiones.
o Interfaz National Instruments. Al igual que la otra interfaz, se recomienda tener los
drivers instalados previamente.
o Modulo NI 9263. En caso de usar otro tipo de modulo es necesario verificar que si
cumpla con los requerimientos para la prueba y realizar las respectivas
modificaciones en el programa de LabView.
o Fuente regulada dual.
o Osciloscopio.
2. Ubicar el montaje en un sitio en el que se tenga espacio suficiente y el ruido ambiental sea
mínimo. Esto debido a que para capturar la señal del impulso se requiere que el ruido sea
muy bajo para obtener buena información sobre los datos.
2.1. Cubrir la tubería con el elemento de aislar el sonido. En este caso, se usaron cobijas
para disminuir el ruido.
3. Conectar el modulo a la interfaz, verificar que esta se encuentre apagada al momento de
conectarla a la toma (recomendación). Luego conectar la interfaz al computador y
encender la interfaz. Verificar que se reconozca en el computador mostrando también el
tipo de modulo conectado.
20
4. Conectar el amplificador operacional a la fuente, el parlante y el modulo en la protoboard
tal que quede una configuración de seguidor. Esto con el objetivo de que al enviar la señal
el parlante no absorba la potencia únicamente como corriente y se pierda el potencial
entregado.
5. Conectar los micrófonos a la interfaz. Identificar cuál de los micrófonos se conectó a cada
una de las entradas de la interfaz.
6. Conectar la interfaz al computador. Se recomienda que al momento de conectarla se
verifique que la fuente phantom este apagada ya que al tenerla encendida se pueden
generar daños sobre los micrófonos. También en el computador se debe identificar la
conexión de la interfaz. Igualmente, se recomienda que por medio del programa de
Audacity se verifique el funcionamiento de cada uno de los micrófonos.
7. Calibrar los micrófonos con el calibrador. Es importante observar la onda que va
capturando los micrófonos para ajustar la ganancia, de esta forma se asegura que los
datos no queden saturados.
8. Ubicar los micrófonos sobre el banco de pruebas. Tomar registro de cuál de los micrófonos
se ubicó en cada uno de los puntos del banco de pruebas.
9. Abrir el programa de LabView en el computador y seleccionar el proyecto en el que se
realiza la toma de datos. Es necesario volver a cargar el modulo que envía la señal en el
diagrama de bloques del programa, para hacer esto se abre el bloque de conexión y se
vuelve a cargar el modulo.
10. Cargar el archivo de audio del impulso al programa junto con el archivo en el que se va a
escribir los datos tomados. Antes de tomar los datos se debe verificar que la frecuencia de
muestreo de la captura de la señal este a 44100 y con 16 bits ya que los datos default de
programa pueden ser distintos.
11. Realizar la toma de datos. Se recomienda que se busque que el ambiente donde se
realicen las pruebas tenga la menor cantidad de ruido posible ya que este puede afectar
gravemente los datos.
12. Abrir el programa de MatLab con el código para el análisis de los datos. Es necesario que el
código se encuentre en la misma carpeta en el que se encuentran los archivos de audio a
analizar con tal de que el programa sea capaz de cargarlos.
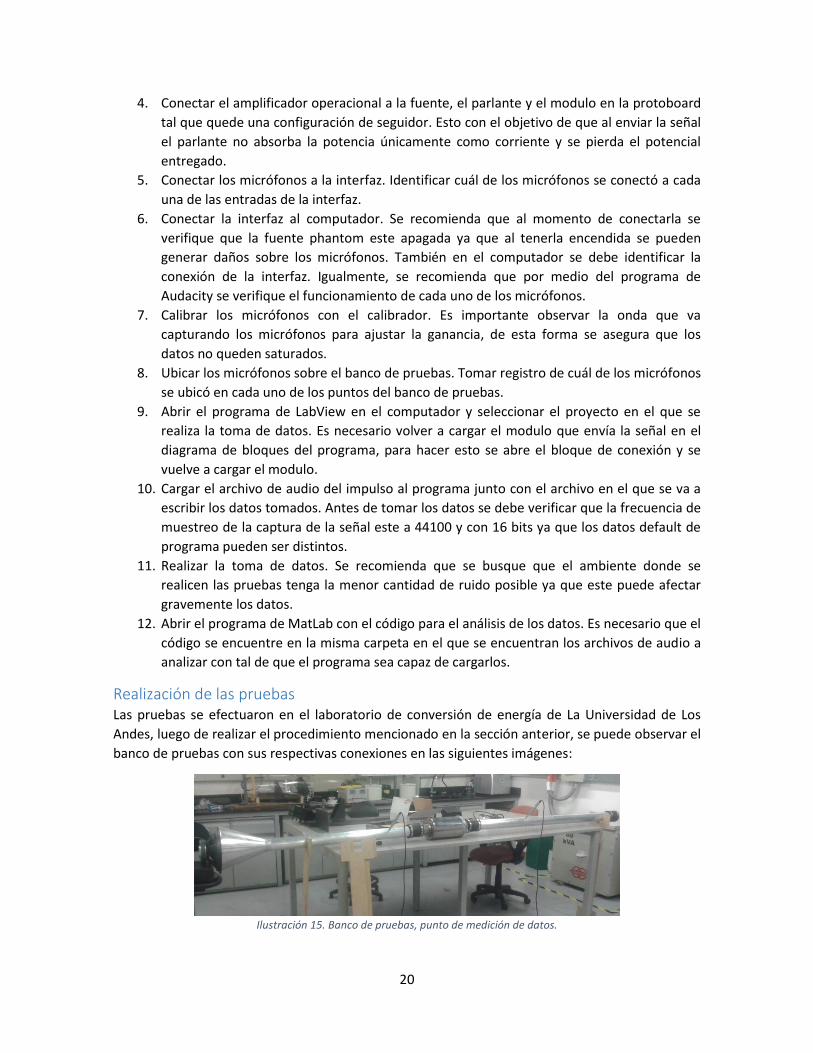
Realización de las pruebas Las pruebas se efectuaron en el laboratorio de conversión de energía de La Universidad de Los
Andes, luego de realizar el procedimiento mencionado en la sección anterior, se puede observar el
banco de pruebas con sus respectivas conexiones en las siguientes imágenes:
Ilustración 15. Banco de pruebas, punto de medición de datos.

21
Debido a que se trata de mediciones de sonido, los micrófonos también capturan el ruido que se
presenta en el ambiente. Para poder disminuir el ruido, en la realización de las pruebas se
utilizaron varias cobijas que ayudaran a disminuir la intensidad de ruido que los micrófonos
estaban capturando. En la siguiente imagen se puede observar el banco de pruebas junto con las
cobijas que se usaron para disminuir el ruido.
Ilustración 16. Banco de pruebas con cobijas para disminución de ruido.
Ilustración 17. Conexión de sistemas para generación de señal.
La conexión que aparece en la imagen anterior corresponde a la conexión de un amplificador
operacional en configuración de seguidor. Esta configuración permite que el parlante no absorba
la potencia enviada por el modulo en forma de corriente sino que se mantenga el voltaje que se
desea emitir. Lo anterior facilita que la intensidad con la que el parlante emite la onda sea lo
mayor posible y los datos se puedan analizar con mayor facilidad.
22
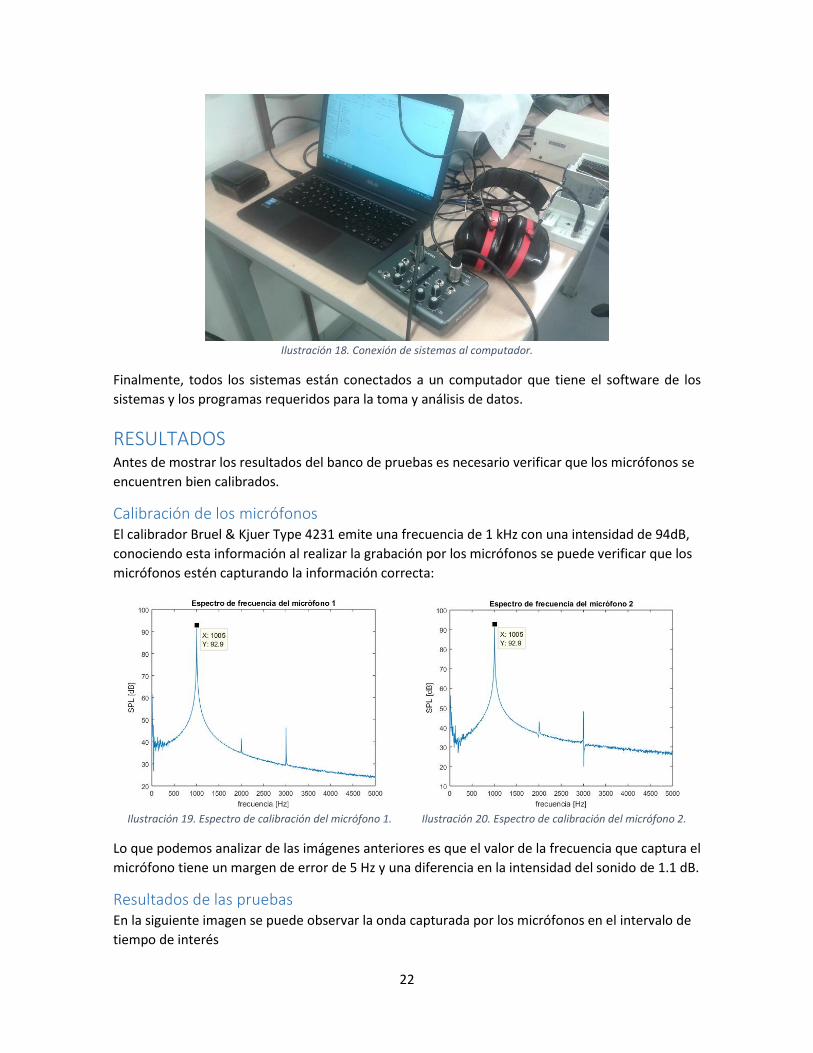
Ilustración 18. Conexión de sistemas al computador.
Finalmente, todos los sistemas están conectados a un computador que tiene el software de los
sistemas y los programas requeridos para la toma y análisis de datos.
RESULTADOS Antes de mostrar los resultados del banco de pruebas es necesario verificar que los micrófonos se
encuentren bien calibrados.
Calibración de los micrófonos El calibrador Bruel & Kjuer Type 4231 emite una frecuencia de 1 kHz con una intensidad de 94dB,
conociendo esta información al realizar la grabación por los micrófonos se puede verificar que los
micrófonos estén capturando la información correcta:
Ilustración 19. Espectro de calibración del micrófono 1. Ilustración 20. Espectro de calibración del micrófono 2.
Lo que podemos analizar de las imágenes anteriores es que el valor de la frecuencia que captura el
micrófono tiene un margen de error de 5 Hz y una diferencia en la intensidad del sonido de 1.1 dB.
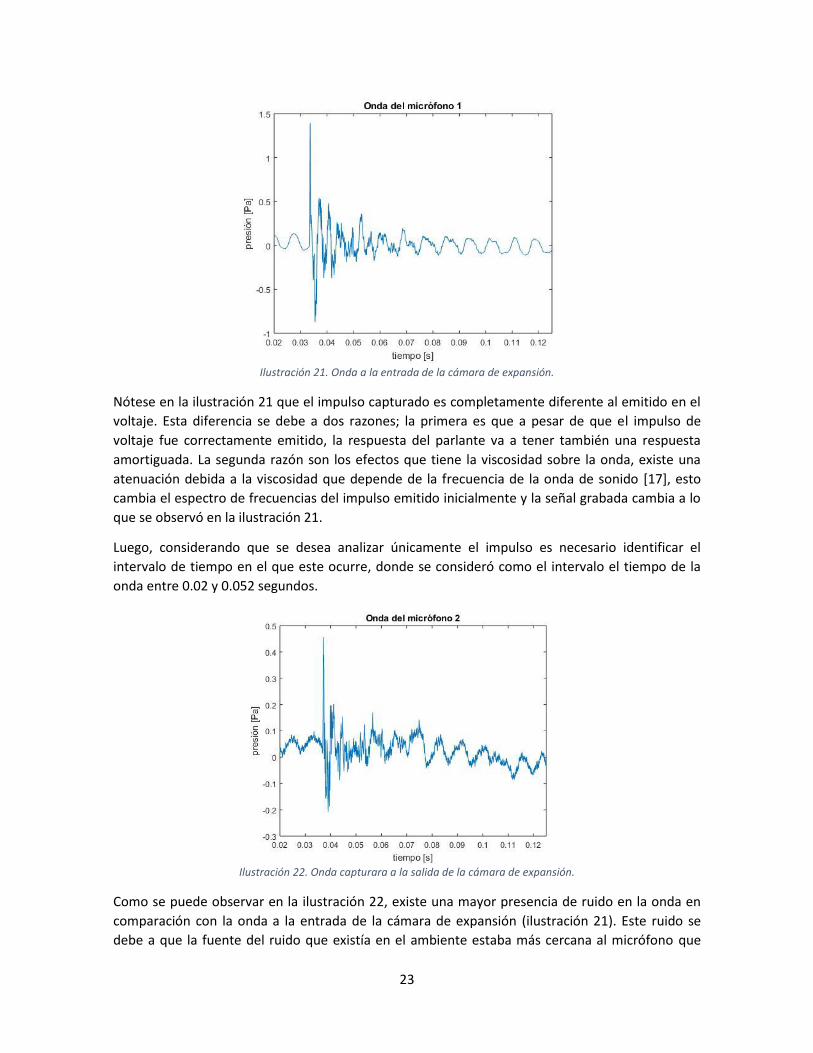
Resultados de las pruebas En la siguiente imagen se puede observar la onda capturada por los micrófonos en el intervalo de
tiempo de interés
23
Ilustración 21. Onda a la entrada de la cámara de expansión.
Nótese en la ilustración 21 que el impulso capturado es completamente diferente al emitido en el
voltaje. Esta diferencia se debe a dos razones; la primera es que a pesar de que el impulso de
voltaje fue correctamente emitido, la respuesta del parlante va a tener también una respuesta
amortiguada. La segunda razón son los efectos que tiene la viscosidad sobre la onda, existe una
atenuación debida a la viscosidad que depende de la frecuencia de la onda de sonido [17], esto
cambia el espectro de frecuencias del impulso emitido inicialmente y la señal grabada cambia a lo
que se observó en la ilustración 21.
Luego, considerando que se desea analizar únicamente el impulso es necesario identificar el
intervalo de tiempo en el que este ocurre, donde se consideró como el intervalo el tiempo de la
onda entre 0.02 y 0.052 segundos.
Ilustración 22. Onda capturara a la salida de la cámara de expansión.
Como se puede observar en la ilustración 22, existe una mayor presencia de ruido en la onda en
comparación con la onda a la entrada de la cámara de expansión (ilustración 21). Este ruido se
debe a que la fuente del ruido que existía en el ambiente estaba más cercana al micrófono que
24
capturaba esta onda. Una posible solución de este problema es realizar una filtración de los datos
con tal que se elimine el ruido, sin embargo, debido al rango de frecuencias que se desea analizar
eliminar este ruido es bastante complicado y es más factible controlar estas fuentes de ruido
durante la realización de las pruebas.
Igualmente que en el caso de la onda de entrada de la cámara, también es necesario en la salida
de la cámara identificar el intervalo de tiempo que se tiene la onda atenuada, sin embargo, en este
caso existe una pequeña interferencia entre la onda atenuada y la reflejada, por lo cual se
seleccionó el mismo intervalo de tiempo.
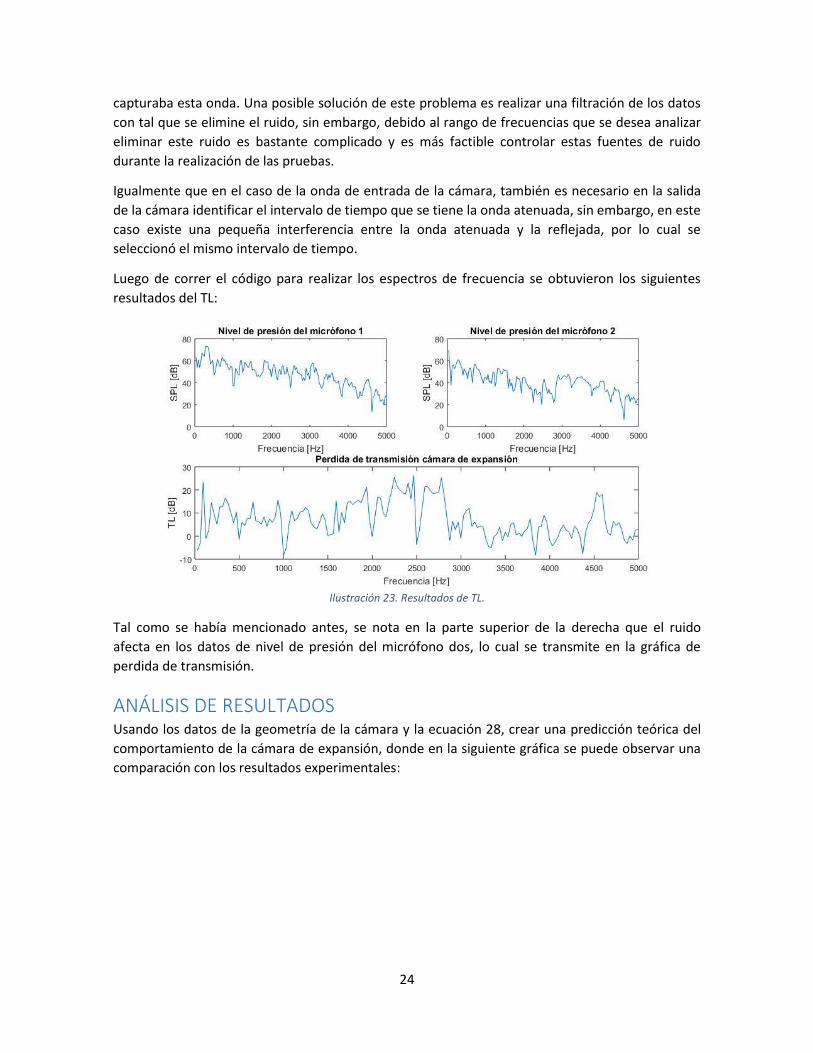
Luego de correr el código para realizar los espectros de frecuencia se obtuvieron los siguientes
resultados del TL:
Ilustración 23. Resultados de TL.
Tal como se había mencionado antes, se nota en la parte superior de la derecha que el ruido
afecta en los datos de nivel de presión del micrófono dos, lo cual se transmite en la gráfica de
perdida de transmisión.
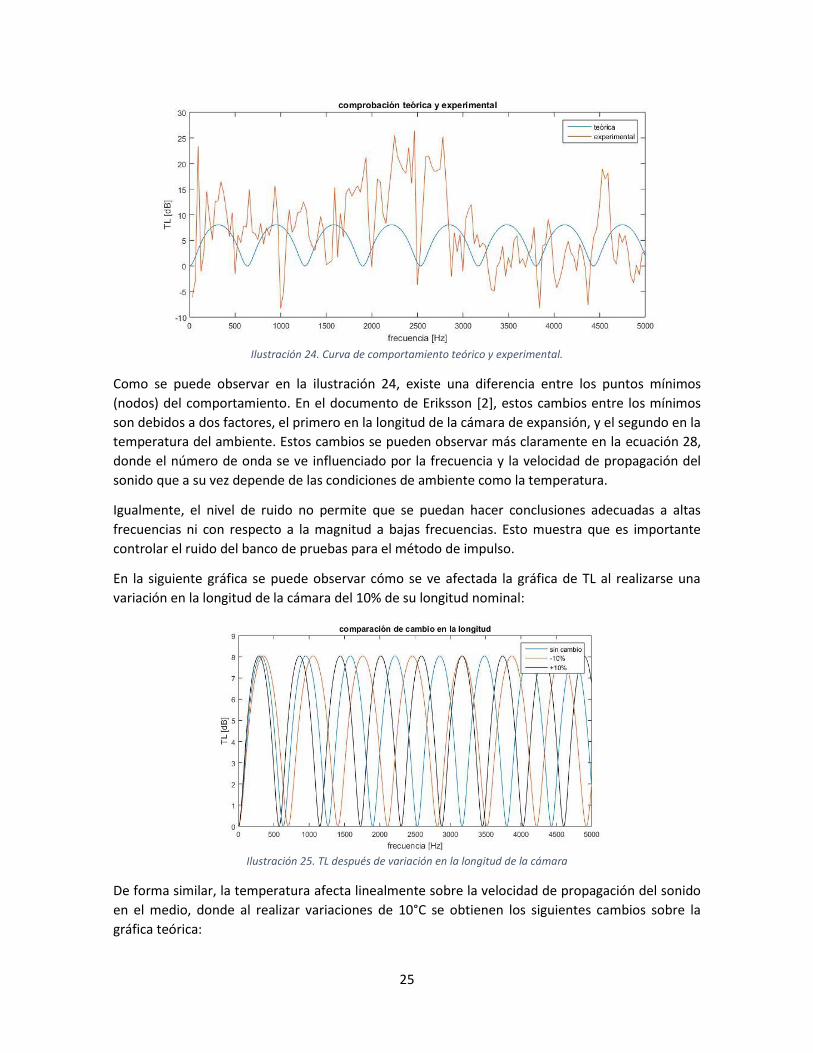
ANÁLISIS DE RESULTADOS Usando los datos de la geometría de la cámara y la ecuación 28, crear una predicción teórica del
comportamiento de la cámara de expansión, donde en la siguiente gráfica se puede observar una
comparación con los resultados experimentales:
25
Ilustración 24. Curva de comportamiento teórico y experimental.
Como se puede observar en la ilustración 24, existe una diferencia entre los puntos mínimos
(nodos) del comportamiento. En el documento de Eriksson [2], estos cambios entre los mínimos
son debidos a dos factores, el primero en la longitud de la cámara de expansión, y el segundo en la
temperatura del ambiente. Estos cambios se pueden observar más claramente en la ecuación 28,
donde el número de onda se ve influenciado por la frecuencia y la velocidad de propagación del
sonido que a su vez depende de las condiciones de ambiente como la temperatura.
Igualmente, el nivel de ruido no permite que se puedan hacer conclusiones adecuadas a altas
frecuencias ni con respecto a la magnitud a bajas frecuencias. Esto muestra que es importante
controlar el ruido del banco de pruebas para el método de impulso.
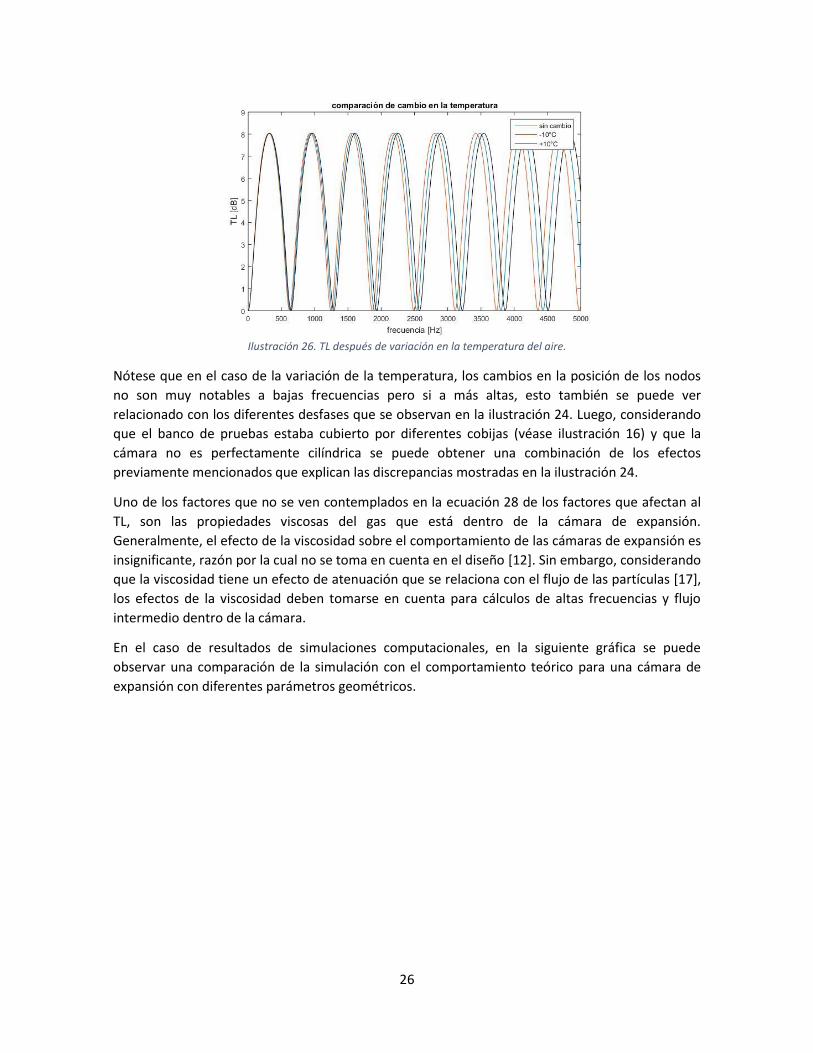
En la siguiente gráfica se puede observar cómo se ve afectada la gráfica de TL al realizarse una
variación en la longitud de la cámara del 10% de su longitud nominal:
Ilustración 25. TL después de variación en la longitud de la cámara
De forma similar, la temperatura afecta linealmente sobre la velocidad de propagación del sonido
en el medio, donde al realizar variaciones de 10°C se obtienen los siguientes cambios sobre la
gráfica teórica:
26
Ilustración 26. TL después de variación en la temperatura del aire.
Nótese que en el caso de la variación de la temperatura, los cambios en la posición de los nodos
no son muy notables a bajas frecuencias pero si a más altas, esto también se puede ver
relacionado con los diferentes desfases que se observan en la ilustración 24. Luego, considerando
que el banco de pruebas estaba cubierto por diferentes cobijas (véase ilustración 16) y que la
cámara no es perfectamente cilíndrica se puede obtener una combinación de los efectos
previamente mencionados que explican las discrepancias mostradas en la ilustración 24.
Uno de los factores que no se ven contemplados en la ecuación 28 de los factores que afectan al
TL, son las propiedades viscosas del gas que está dentro de la cámara de expansión.
Generalmente, el efecto de la viscosidad sobre el comportamiento de las cámaras de expansión es
insignificante, razón por la cual no se toma en cuenta en el diseño [12]. Sin embargo, considerando
que la viscosidad tiene un efecto de atenuación que se relaciona con el flujo de las partículas [17],
los efectos de la viscosidad deben tomarse en cuenta para cálculos de altas frecuencias y flujo
intermedio dentro de la cámara.
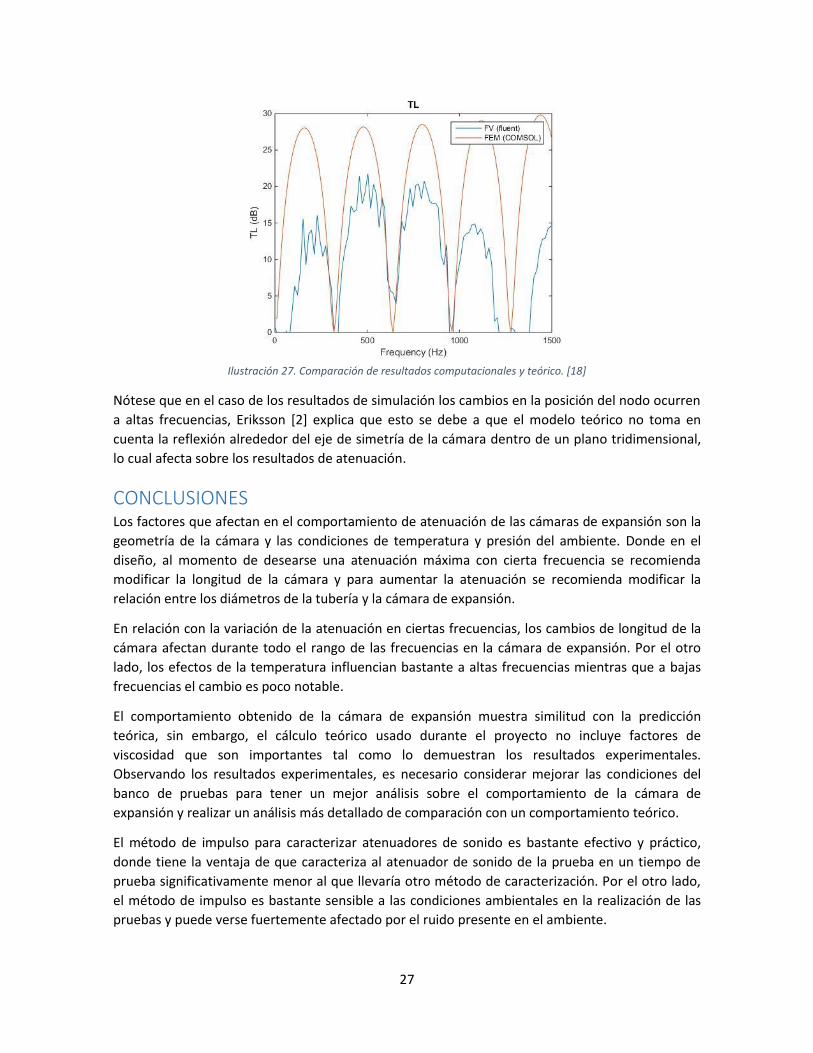
En el caso de resultados de simulaciones computacionales, en la siguiente gráfica se puede
observar una comparación de la simulación con el comportamiento teórico para una cámara de
expansión con diferentes parámetros geométricos.
27
Ilustración 27. Comparación de resultados computacionales y teórico. [18]
Nótese que en el caso de los resultados de simulación los cambios en la posición del nodo ocurren
a altas frecuencias, Eriksson [2] explica que esto se debe a que el modelo teórico no toma en
cuenta la reflexión alrededor del eje de simetría de la cámara dentro de un plano tridimensional,
lo cual afecta sobre los resultados de atenuación.
CONCLUSIONES Los factores que afectan en el comportamiento de atenuación de las cámaras de expansión son la
geometría de la cámara y las condiciones de temperatura y presión del ambiente. Donde en el
diseño, al momento de desearse una atenuación máxima con cierta frecuencia se recomienda
modificar la longitud de la cámara y para aumentar la atenuación se recomienda modificar la
relación entre los diámetros de la tubería y la cámara de expansión.
En relación con la variación de la atenuación en ciertas frecuencias, los cambios de longitud de la
cámara afectan durante todo el rango de las frecuencias en la cámara de expansión. Por el otro
lado, los efectos de la temperatura influencian bastante a altas frecuencias mientras que a bajas
frecuencias el cambio es poco notable.
El comportamiento obtenido de la cámara de expansión muestra similitud con la predicción
teórica, sin embargo, el cálculo teórico usado durante el proyecto no incluye factores de
viscosidad que son importantes tal como lo demuestran los resultados experimentales.
Observando los resultados experimentales, es necesario considerar mejorar las condiciones del
banco de pruebas para tener un mejor análisis sobre el comportamiento de la cámara de
expansión y realizar un análisis más detallado de comparación con un comportamiento teórico.
El método de impulso para caracterizar atenuadores de sonido es bastante efectivo y práctico,
donde tiene la ventaja de que caracteriza al atenuador de sonido de la prueba en un tiempo de
prueba significativamente menor al que llevaría otro método de caracterización. Por el otro lado,
el método de impulso es bastante sensible a las condiciones ambientales en la realización de las
pruebas y puede verse fuertemente afectado por el ruido presente en el ambiente.

28
CONSIDERACIONES A TRABAJO FUTURO Realizar las pruebas en una sala a prueba de sonido para disminuir el ruido de los datos
tomados. Esto permitirá un mejor análisis sobre los resultados de TL obtenidos
experimentalmente en el banco de pruebas.
Tomar datos del impulso enviado justo a la salida del parlante y analizar cómo esto afecta
en los datos de la experimentación.
Extender la tubería de salida del banco de pruebas y analizar cómo cambian los datos
tomados de la onda de salida. Esto puede disminuir cualquier posible interferencia entre la
onda de interés y la reflejada a la salida del banco de pruebas.
Rediseñar el banco de pruebas tal que se pueda incluir el parámetro de flujo dentro del
atenuador de sonido. Al incluir el flujo se puede hacer un mejor análisis sobre los efectos
viscosos del medio.
29
REFERENCIAS
[1] A. Martínez Sandoval, "Ruido por trafico urbano: Conceptos, medidas descriptivas y
valoración económica," Revista de economía y administración, pp. 1-49, 2005.
[2] L. J. Eriksson and P. T. Thawani, "Theory and Parctice in Exhaust System Design," Nelson
Industries, Inc., Stoughton, WI, 1995.
[3] X. Hua, C. Jiang, D. W. Herrin and T. W. Wu, "Determination of transmission and insertion loss
for multi-inlet mufflers usin impedance matrix and superposition approaches with
comparisons," Journal of Sound and Vibration, vol. 1, no. 333, pp. 5680-5692, 2014.
[4] Z. Tao and A. F. Seybert, "A Review of Current Techniques for Measuring Muffler Transmission
Loss," Society of Automotive Engineers, Inc, Kentucky, 2003.
[5] R. Singh and T. Katra, "DEVELOPMENT OF AN IMPULSE TECHNIQUE FOR MEASUREMENT OF
MUFFLER CHARACTERISTICS," Journal of Sound and Vibration, vol. 2, no. 56, pp. 279-298,
1978.
[6] S. Kumar, "Linear Acoustic Modelling And Testing of Exhaust Muffles," Royal Institute of
Technology, Stockholm, Sweden, 2007.
[7] J. M. Middelberg, T. J. Barber, S. S. Leong, K. P. Byrne and E. Leonardi, "COMPUTATIONAL
FLUID DYNAMICS ANALYSIS OF THE ACOUSTIC PERFOMANCE OF VARIOUS SIMPLE EXPANSION
CHAMBER MUFFLERS," The University of New South Wales, Gold Coast, Australia, 2004.
[8] A. Selamet and Z. Ji, "ACOUSTIC ATTENUATION PERFOMANCE OF CIRCULAR EXPANSION
CHAMBERS WITH OFFSET INLET/OUTLET: I. ANALYTICAL APPROACH," Journal of Sound and
Vibration, vol. 4, no. 213, pp. 601-617, 1998.
[9] A. Selamet, Z. Ji and P. Radavich, "ACOUSTIC ATTENUATION PERFORMANCE OF CIRCULAR
EXPANSION CHAMBERS WITH OFFSET INLET/OUTLET: II. COMPARISON WITH EXPERIMENTAL
AND COMPUTATIONAL STUDIES," Journal of Sound and Vibration, vol. 4, no. 213, pp. 619-641,
1998.
[10] R. L. Romero Gajardo, Estudio de la Pérdida de Inserción (IL) en Silenciadores Reactivos,
Valdivia: Universidad Austral de Chile, 2008.
[11] C. Sanz, "Técnicas para el estudio acústico en vehículos (Noise, Vibration and Harshness),"
Universidad politecnica de Valencia, Gandia, 2012.
[12] M. L. Munjal, Acoustics of Ducts and Mufflers: With Application to Exhaust and Ventilation
System Design, Bangalore: JOHN WILEY & SONS, INC., 1987.
[13] M. d. C. Pérez, "Silenciadores," Universidad de Sevilla, Sevilla.
30
[14] Universidad Rafael Urdaneta, "fondo editorial," [Online]. Available:
http://www.uru.edu/fondoeditorial/articulos/FUNCIONES%20BESSEL.pdf. [Accessed 11
Noviembre 2015].
[15] R. Courant and F. John, "Trigonometric Series," in Introduction to calculus and analysis, New
York, Interscience, 1964, pp. 587-598.
[16] MathWorks, Inc, "mathworks," [Online]. Available:
http://www.mathworks.com/products/matlab/?refresh=true. [Accessed 10 10 2015].
[17] E. Tucholski, "United States Naval Academy," [Online]. Available:
http://www.usna.edu/Users/physics/ejtuchol/documents/SP411/Chapter10.pdf. [Accessed
29 Noviembre 2015].
[18] J. L. Cepeda Aguilar, O. López Mejía, J. Arroyo and A. L. González Mancera, CFD study of the
acoustic performance of simple expansion chamber mufflers, Lisboa: Congresso de Métodos
Numéricos em Engenharia, 2015.
31
ANEXOS
Código de MatLab usado para análisis de resultados clc
clear all
close all
%% Análisis de datos obtenidos
%% Calibración de los micrófonos
% Obtención de las señales de calibración
[Cm1,Fscm1]=audioread('calmic1.wav');
[Cm2,Fscm2]=audioread('calmic2.wav');
ocm1=Cm1(:,1);
ocm2=Cm2(:,2);
% Parámetros de las señales
lmc1=length(ocm1);
lmc2=length(ocm2);
rmsc1=sqrt(mean(ocm1.*ocm1));
rmsc2=sqrt(mean(ocm2.*ocm2));
% Factores de calibración de cada micrófono
fc1=2e-5*(10^(94/20))/rmsc1;
fc2=2e-5*(10^(94/20))/rmsc2;
% Señales convertidas a unidades de presión
ocm1=ocm1*fc1;
ocm2=ocm2*fc2;
% Cálculo de espectro de frecuencias
FOC1=abs(fft(ocm1,lmc1));
EOC1=(FOC1*2/lmc1)/sqrt(2);
frc1=(Fscm1/lmc1)*(1:length(EOC1));
EOC2=fft(ocm2,lmc2);
frc2=(Fscm2/lmc2)*(1:length(EOC2));
EOC2=abs(EOC2);
EOC2=(EOC2*2/lmc2)/sqrt(2);
% Nivel de presión de sonido
EOC1=20*log10(EOC1/2e-5);
EOC2=20*log10(EOC2/2e-5);
% Gráficas de espectro
figure (1)
plot(frc1,EOC1);
xlim([0 5000]);
32
xlabel('frecuencia [Hz]');
ylabel('SPL [dB]');
title('Espectro de frecuencia del micrófono 1')
figure (2)
plot(frc2,EOC2);
xlim([0 5000]);
xlabel('frecuencia [Hz]');
ylabel('SPL [dB]');
title('Espectro de frecuencia del micrófono 2')
pause
%% Análisis de datos
% Datos obtenidos por los micrófonos
[dm, FS]=audioread('prueba 4.wav');
om1=dm(:,1);
om2=dm(:,2);
dt=1/FS;
t=linspace(0,dt*length(om1),length(om1));
%Recortaremos los datos al tiempo que se analizara
nt1=0.052/dt;
nt2=0.02/dt;
om1=om1(nt2:nt1);
om2=om2(nt2:nt1);
t1=t(nt2:nt1);
%Parámetros de las ondas
lm1=length(om1);
lm2=length(om2);
%Conversión a unidades de presión
om1=om1*fc1;
om2=om2*fc2;
% Visualización de las ondas
% Es importante visualizar las ondas para observar los
parámetros de las
% ecuaciones de Singh
figure (1)
plot(t1,om1);
xlabel('tiempo [s]');
ylabel('presión [Pa]');
title('Onda del micrófono 1');
xlim([nt2*dt nt1*dt]);
figure (2)
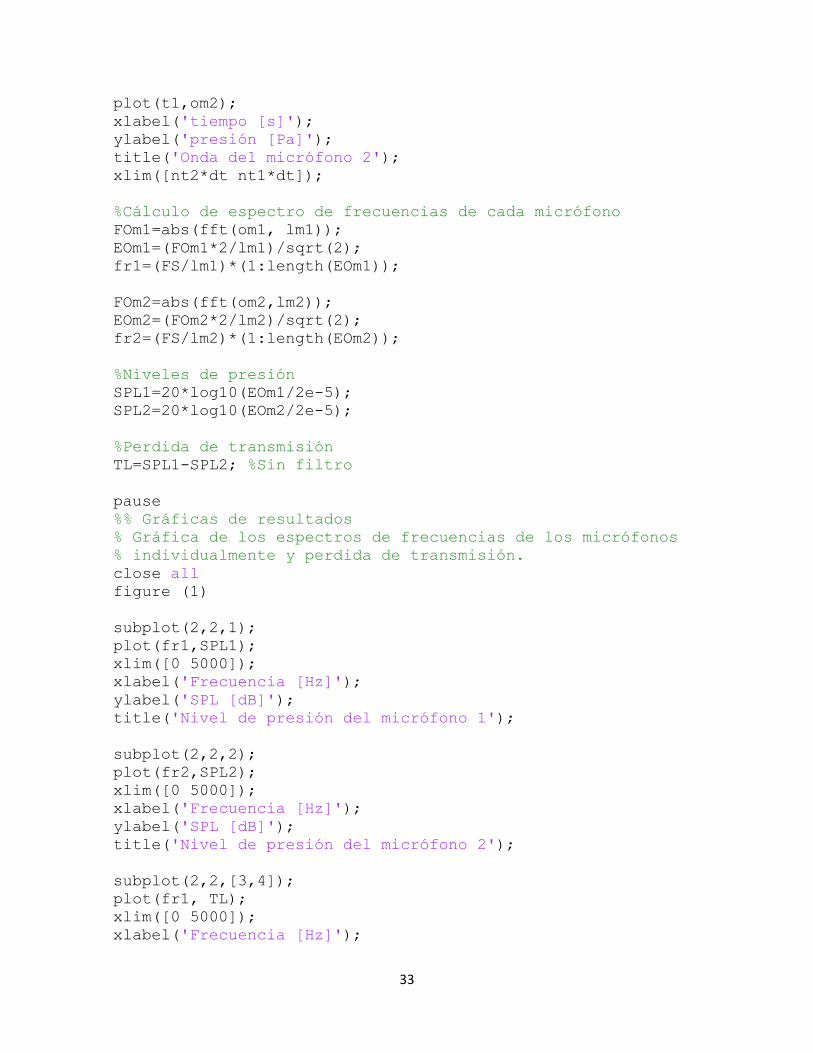
33
plot(t1,om2);
xlabel('tiempo [s]');
ylabel('presión [Pa]');
title('Onda del micrófono 2');
xlim([nt2*dt nt1*dt]);
%Cálculo de espectro de frecuencias de cada micrófono
FOm1=abs(fft(om1, lm1));
EOm1=(FOm1*2/lm1)/sqrt(2);
fr1=(FS/lm1)*(1:length(EOm1));
FOm2=abs(fft(om2,lm2));
EOm2=(FOm2*2/lm2)/sqrt(2);
fr2=(FS/lm2)*(1:length(EOm2));
%Niveles de presión
SPL1=20*log10(EOm1/2e-5);
SPL2=20*log10(EOm2/2e-5);
%Perdida de transmisión
TL=SPL1-SPL2; %Sin filtro
pause
%% Gráficas de resultados
% Gráfica de los espectros de frecuencias de los micrófonos
% individualmente y perdida de transmisión.
close all
figure (1)
subplot(2,2,1);
plot(fr1,SPL1);
xlim([0 5000]);
xlabel('Frecuencia [Hz]');
ylabel('SPL [dB]');
title('Nivel de presión del micrófono 1');
subplot(2,2,2);
plot(fr2,SPL2);
xlim([0 5000]);
xlabel('Frecuencia [Hz]');
ylabel('SPL [dB]');
title('Nivel de presión del micrófono 2');
subplot(2,2,[3,4]);
plot(fr1, TL);
xlim([0 5000]);
xlabel('Frecuencia [Hz]');
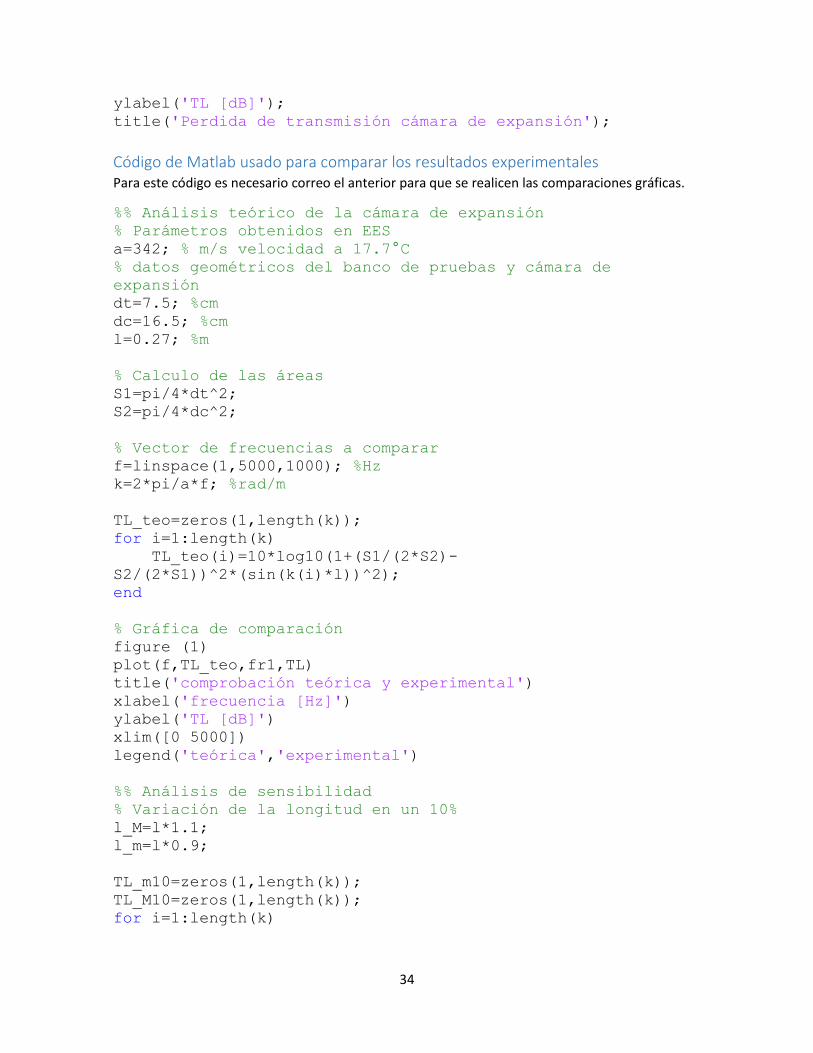
34
ylabel('TL [dB]');
title('Perdida de transmisión cámara de expansión');
Código de Matlab usado para comparar los resultados experimentales Para este código es necesario correo el anterior para que se realicen las comparaciones gráficas.
%% Análisis teórico de la cámara de expansión
% Parámetros obtenidos en EES
a=342; % m/s velocidad a 17.7°C
% datos geométricos del banco de pruebas y cámara de
expansión
dt=7.5; %cm
dc=16.5; %cm
l=0.27; %m
% Calculo de las áreas
S1=pi/4*dt^2;
S2=pi/4*dc^2;
% Vector de frecuencias a comparar
f=linspace(1,5000,1000); %Hz
k=2*pi/a*f; %rad/m
TL_teo=zeros(1,length(k));
for i=1:length(k)
TL_teo(i)=10*log10(1+(S1/(2*S2)-
S2/(2*S1))^2*(sin(k(i)*l))^2);
end
% Gráfica de comparación
figure (1)
plot(f,TL_teo,fr1,TL)
title('comprobación teórica y experimental')
xlabel('frecuencia [Hz]')
ylabel('TL [dB]')
xlim([0 5000])
legend('teórica','experimental')
%% Análisis de sensibilidad
% Variación de la longitud en un 10%
l_M=l*1.1;
l_m=l*0.9;
TL_m10=zeros(1,length(k));
TL_M10=zeros(1,length(k));
for i=1:length(k)
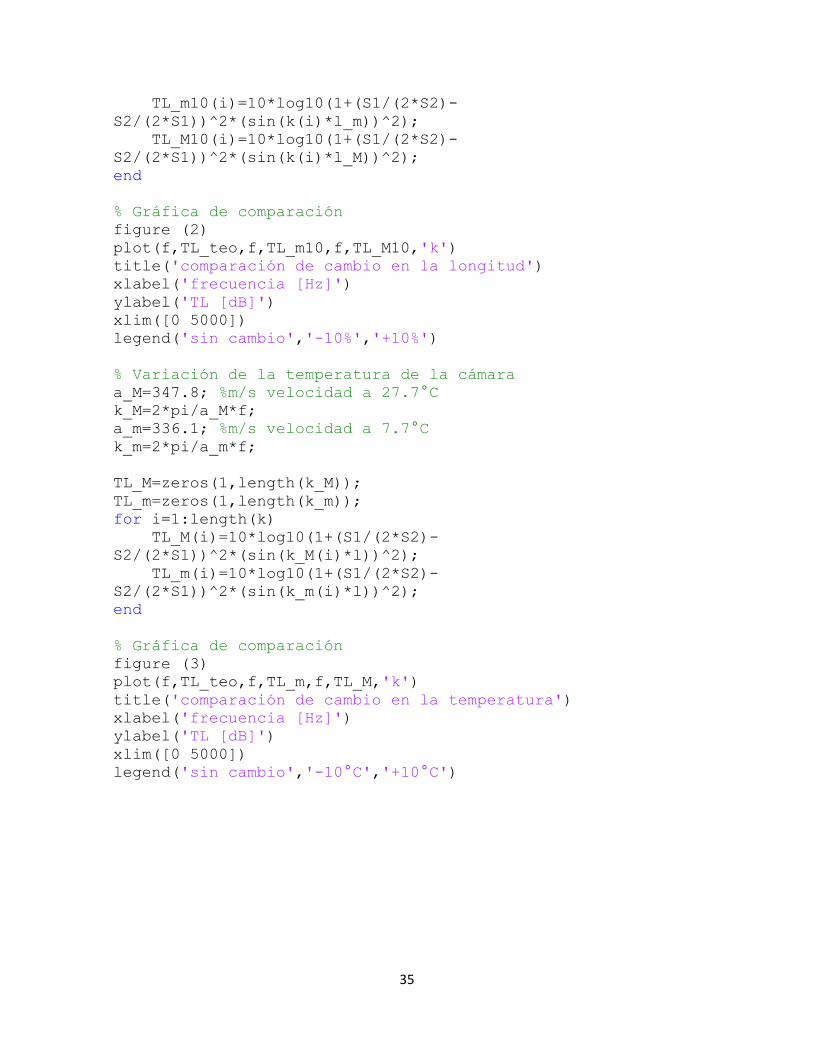
35
TL_m10(i)=10*log10(1+(S1/(2*S2)-
S2/(2*S1))^2*(sin(k(i)*l_m))^2);
TL_M10(i)=10*log10(1+(S1/(2*S2)-
S2/(2*S1))^2*(sin(k(i)*l_M))^2);
end
% Gráfica de comparación
figure (2)
plot(f,TL_teo,f,TL_m10,f,TL_M10,'k')
title('comparación de cambio en la longitud')
xlabel('frecuencia [Hz]')
ylabel('TL [dB]')
xlim([0 5000])
legend('sin cambio','-10%','+10%')
% Variación de la temperatura de la cámara
a_M=347.8; %m/s velocidad a 27.7°C
k_M=2*pi/a_M*f;
a_m=336.1; %m/s velocidad a 7.7°C
k_m=2*pi/a_m*f;
TL_M=zeros(1,length(k_M));
TL_m=zeros(1,length(k_m));
for i=1:length(k)
TL_M(i)=10*log10(1+(S1/(2*S2)-
S2/(2*S1))^2*(sin(k_M(i)*l))^2);
TL_m(i)=10*log10(1+(S1/(2*S2)-
S2/(2*S1))^2*(sin(k_m(i)*l))^2);
end
% Gráfica de comparación
figure (3)
plot(f,TL_teo,f,TL_m,f,TL_M,'k')
title('comparación de cambio en la temperatura')
xlabel('frecuencia [Hz]')
ylabel('TL [dB]')
xlim([0 5000])
legend('sin cambio','-10°C','+10°C')