capítulo 4 identificación y control predictivo no lineal ...€¦ · el controlador que se...
TRANSCRIPT

Capítulo 4
Identificación y control predictivo no lineal del módulo de pH. Resultados experimentales.
4.1 Software LabView
El trabajo experimental requiere del uso de módulos que permitan interactuar con los dispositivos actuadores y los sensores. Esta interacción se realiza mediante señales de corriente o voltaje según los formatos elegidos. El formato con el que se ha trabajado en este caso es de corriente (4-20 mA).
La información obtenida en corriente debe ser procesada para obtener las unidades con las que se esté trabajando. El software utilizado que permitirá realizar estas conversiones, además de permitir realizar el controlador para el sistema es: LabView.
LabView hace referencia a Laboratory Virtual Instrument Engineering Workbech, este programa permite aplicar programación gráfica o en diagrama de bloques, incluyendo opciones de adquisición, análisis y presentación de señales en tiempo real.
Cada programa desarrollado en este entorno tendrá dos ventanas principales, un panel frontal y un panel de diagramas de bloques.
El panel frontal es la interfaz del instrumento virtual (programa) con el usuario. En este se pueden emplear gráficos, botones, potenciómetros, esquemas, etc. Se pueden especificar como elementos los indicadores, controladores o valores constantes según la necesidad (ver figura 4.1).

94
Figura 4.1 Panel frontal de instrumento virtual.
El panel de programación en diagrama de bloques es mostrado en la figura 4.2, en ella se puede realizar programas gráficos y es en esta ventana donde se almacena el código del instrumento virtual. En este diagrama de bloques se pueden emplear funciones, estructuras de programación, todos los elementos utilizados en esta programación son unidos mediante terminales y lazos.
Figura 4.2 Panel de programación en diagrama de bloques.

95
4.2 Módulo Compact FieldPoint
El Compact FieldPoint es un controlador de automatización programable altamente expansible compuesto de módulos robustos de entrada-salida. Está diseñado para aplicaciones de control industrial, ofrece la flexibilidad y facilidad de uso de una computadora personal y la fiabilidad de un controlador lógico programable (PLC).
La arquitectura de entrada-salida del Compact FieldPoint proporciona conectividad directa a sensores industriales tales como voltaje analógico, corriente de 4-20 mA, termopares, presión, flujo, entre otros.
Sus principales beneficios son:
- Grado industrial. El Compact FieldPoint cuenta con especificaciones industriales como 50 g de shock, vibración de 5 g y rango de temperaturas de trabajo desde -40 hasta 70 ºC.
- Fiabilidad. El módulo Compact FieldPoint ejecuta aplicaciones en tiempo real brindando un rendimiento determinístico.
- Facilidad de uso. No se requiere de un conocimiento previo de programación avanzada, se puede empezar con sin experiencia e ir avanzando en el camino.
El Compact Field Point presenta módulos independientes de ingreso de señales (en tensión y en corriente), de salida de señales (en tensión y en corriente), además de módulos de adquisición de señales de termopares y otros.
Antes de continuar, es necesario recordar que el actuador en este trabajo es la bomba de base y el sensor el es pHmetro. A la bomba se le entregará corriente para su actuación y el pHmetro enviará señales de corriente para el proceso de adquisición de señales, ambas en el rango de 4-20mA.
4.2.1 Módulo de salida de señales de corriente (cFP-AO-200).
Este módulo permite la salida de señales de actuación analógica en el rango de corriente que se establezca (0-20mA o 4-20mA), ambas pueden configurarse antes de empezar la realización del programa de adquisición o de envío de señales en este caso. Como ya se indicó, en este trabajo se empleó el rango de 4-20mA, al igual que el rango con el que trabajan las industrias por el tema de que la medición cero puede indicar falla y conduce a confusiones.
En la figura 4.3 se aprecia el módulo de salida de corriente cFP-AO-200, en éste se aprecian los LED’s prendidos según los canales que se estén empleando. A este módulo lo acompaña otra parte del módulo en el que se realizan las conexiones según los canales que se requieran activar y de cuantas salidas de corriente sean necesarias. Este módulo permite un total de 8 puntos de entrega de corriente.

96
Figura 4.3. Módulo de salida de corriente cFP-AO-200.
La forma de conectar los terminales y de alimentar (energizar) al módulo se muestra en la tabla 4.1 Por ejemplo si se usa el canal cero, Iout (1) es el terminal por el que sale la corriente, el común (COM 2) en el respectivo terminal de cierre de circuito, además es necesario alimentar con un nivel de tensión entre los puntos Vsup(17) y su respectivo común (COM 18) para cerrar circuito; de esta manera, se energiza el módulo y éste es capaz de entregar la corriente deseada.
Tabla 4.1. Números de los terminales para cada canal de salida de corriente.
Para un mayor entendimiento se muestra la figura 4.4, en ella se aprecia como Loop
Supply la alimentación de energía (terminal positivo V:18 y terminal negativo C:17), y como Load al actuador empleado (terminal positivo Iout:1 y terminal negativo COM:2).

97
Figura 4.4. Esquema de conexión para el módulo FP-AO-200.
4.2.1 Módulo de adquisición de señales (cFP-AI-110).
Este módulo permite adquirir señales tanto de corriente como de tensión, al igual en el módulo de salida de señales, la corriente puede regularse para un rango de 0-20mA o de 4-20mA y la tensión puede hacerlo en varios niveles como: ±60mV, ±300mV, ±1V, ±5V, ± 10V, 0-1 V, 0-5 V, 0-10 V según sea el caso. Los más empleados son los últimos 3 rangos de tensión.
En la figura 4.5 se puede apreciar el módulo de adquisición de señales, que para este trabajo fue en corriente y en el rango de 4-20 mA. Este módulo presenta también 8 canales de adquisición de datos, por lo tanto puede registrar independientemente sus procesos por canal.
Figura 4.5 Módulo de adquisición de señales.

98
La forma de conectar los canales necesarios para los procesos se muestra en la tabla 4.2. Por ejemplo, si se requiere emplear el canal 0, el terminal Iin (2) es por donde debe conectarse la salida de corriente del sensor, y el común (COM 18) cierra el circuito principal. Si se requiere emplear señales de tensión para adquirir datos, debe utilizarse el terminal 1 a cambio de terminal 2.
Tabla 4.2. Números de terminales en el módulo de adquisición de datos.
4.3 Desarrollo e implementación del programa de control en LabView.
El controlador que se diseñará como ya se indicó es un predictivo no lineal, por lo tanto el programa de control desarrollado debe contener tanto la programación para adquisición de datos, para envío de datos, el procesamiento con el polinomio de Hammerstein previamente obtenido y el algoritmo de control GPC.
En la etapa de simulación del capítulo 3, el controlador se desarrolló enteramente en el entorno Simulink de Matlab, ahora este controlador debe desarrollarse e implementarse en el entorno LabView para poder emplear el Compact FieldPoint.
El programa se diseñó considerando que sea permisible el cambio de parámetros en tiempo real, tales como: horizonte de control, relación energía-calidad y polinomio de aproximación. De esta manera, el controlador funcionará para todos los procesos no lineales que se estudien con modelación Hammerstein, sean controlables, y se utilice para ello el control predictivo.
4.3.1 Programación en LabView.
Para desarrollar el programa de control es necesario tener un conocimiento previo de las estructuras, funciones, y elementos de supervisión más importantes.
Entre las estructuras más utilizadas para este trabajo se encuentran:
99
Case Structure. Esta estructura permite trabajar con varios subdiagramas de bloques que están debidamente indicados por un valor numérico o booleano, de esta manera se pueden obtener distintos diagramas de bloques dependiendo de la condición actual del programa. Se aprecia la estructura gráfica en la figura 4.6
Figura 4.6. Representación gráfica del case structure.
While Loop. Al igual que en otro tipo de programación, esta estructura permite repetir un algoritmo mientras no acontezca el evento que indique salir de este lazo. Puede apreciarse la representación de esta estructura en la figura 4.7.
Figura 4.7. Representación gráfica del while loop.
For Loop. Esta estructura permite realizar un algoritmo un número determinado de veces, hasta que el contador de repeticiones llegue a un valor establecido según el requerimiento. Se aprecia en la figura 4.8 la representación de esta estructura.
Figura 4.8. Representación gráfica del for loop.
El LabView como ya se mencionó, tiene funciones de supervisión del proceso, lo que permite visualizar on-line las señales desarrolladas en toda la estructura de control, sobre todo las señales de salida y de entrada al proceso.
Entre los elementos de supervisión más empleados en este trabajo podemos encontrar:
Waveform Graphs. Este elemento funciona como un osciloscopio que permite visualizar señales de cualquier parte del proceso.
En la figura 4.9 se observa este elemento y un gráfico de cómo se hace el seguimiento de señales. En el eje horizontal se observa el tiempo y en el eje vertical la amplitud de la señal.

100
Figura 4.9. Elemento de supervisión Waveform Graphs.
Boolean. Este elemento es muy utilizado para representar alarmas, ya que se activa el LED cuando se cumple una condición programada. Por ejemplo, se puede insertar un boolean que se encienda al sobrepasar una temperatura límite, o cuando la velocidad se está sobrepasando. Se aprecia este elemento en la figura 4.10:
Figura 4.10. Elemento booleano.
Conocidas las principales estructuras y esquemas de supervisión, se procede a trabajar con funciones, que serán las aplicaciones directamente tratadas.
Debido a que el algoritmo de control del GPC presenta varias iteraciones para los cálculos, y por la estructura de las operaciones, se prefiere trabajar con vectores o polinomios y con matrices, para simplificar el cálculo.
Entre las funciones más empleadas se encuentran:
Funciones polinomiales. Son usadas para hacer las operaciones básicas con polinomios, por ejemplo, suma, resta, multiplicación y división. A continuación se muestran los íconos correspondientes a estas funciones:
Add polynomials:
Substract polynomials:

101
Multiply polinomials:
Divide polynomials:
Se utilizaron también funciones adicionales que facilitaron la programación del controlador. Entre ellas:
Array size. Devuelve la longitud del array solicitado.
Array max and min. Devuelve los valores máximo y mínimo, además de sus respectivas posiciones.
Delete from array. Permite eliminar un valor o un conjunto de valores desde un array de partida.
Insert into array. Permite insertar un valor o un conjunto de valores en una posición especificada, dentro de un array inicial.
Replace array subset. Permite reemplazar una parte del array por otra sin modificar su longitud.

102
Estas son las funciones gráficas que más se han empleado en el desarrollo del controlador en LabView. La elaboración del mismo, se desarrolló partiendo de las operaciones matemáticas que involucra el controlador predictivo GPC.
En la figura 4.11a se presenta un esquema de una parte del controlador diseñado en el panel de programación, en la zona de interacción con el módulo real, y en la figura 4.11b se muestra una zona intermedia del controlador, donde se aprecia el uso de algunas funciones y estructuras antes citadas.
Figura 4.11a. Zona de programación para la interacción con el FieldPoint.
Figura 4.11b. Panel de diagrama de bloques de LabView.

103
En la figura 4.12 se aprecia el panel frontal en el que pueden hacerse modificaciones del polinomio de aproximación, modificaciones en los parámetros de control como horizonte de control, relación energía-calidad, y si se requiere trabajar a lazo abierto o con regulación. Puede verse también como va respondiendo el sistema en el tiempo por medio de sus ventadas de supervisión.
Figura 4.12. Panel frontal del LabView.
El controlador desarrollado presenta las ventajas de servir para cualquier proceso no lineal que pueda representarse por modelación Hammerstein con aproximación polinomial.
4.4 Desarrollo del experimento
El trabajo experimental tiene muchas más complicaciones que el trabajo de simulación, principalmente porque los errores se deben corregir on-line y el material de prueba no puede desperdiciarse por dos motivos: el tiempo que toma la preparación de los reactivos y costo de los mismos.
El experimento ha sido desarrollado por etapas secuenciales, el primer paso fue identificar el proceso con dos pruebas: respuesta del sistema a entradas escalón y respuesta del sistema a entrada PRS. Con los resultados se procede a elaborar el modelo del proceso y el controlador predictivo para su funcionamiento en tiempo real.
4.4.1 Etapa de identificación
Es necesario conocer de manera precisa el comportamiento del sistema ante diferentes estímulos, con ello se puede modelar una representación equivalente (elaboración de un modelo para regularlo) y de esta manera se ayude a la obtención de

104
parámetros de control predictivo. Como este proceso es no lineal, se debe encontrar la relación entrada salida del sistema, y luego la representación de la dinámica lineal para hacer el equivalente del proceso en dos diagramas de bloques en cascada: uno de no linealidad y otro de dinámica lineal. Esta estructura es la que se emplea en la modelación Hammerstein.
4.4.1.1 Identificación de la no linealidad estática
Al igual que en la etapa de simulación, esta etapa consiste en la obtención de un polinomio que relacione la salida estacionaria del sistema con las entradas escalón aplicadas para obtener el bloque de la no linealidad estática del proceso.
Para este experimento se utilizó una señal de diez escalones igualmente espaciados (ver figura 4.13) para obtener la respuesta del sistema en todo el rango de análisis. La misma señal que se empleó en la etapa de simulación fue utilizada en esta etapa.
Figura 4.13. Señal de entrada al módulo experimental de pH.
Tomando los valores de variación de la entrada y respuesta estacionaria de la señal de salida se obtienen unos puntos que al unirlos permite obtener la gráfica de la función que se aproxima con un polinomio. La gráfica experimental de la función que debe aproximarse se muestra en la figura 4.14.
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000 11000 12000 13000 14000 150000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Tiempo(s)
Caudal NaOH (L/m
in)

105
Figura 4.14. Polinomio de no linealidad experimental para aproximar.
Posteriormente es necesario aproximar esta función mediante un polinomio que sea lo más cercano posible a estos puntos mediante función de mínimos cuadrados. Esto se puede apreciar en la figura 4.15.
Figura 4.15. Validación del polinomio de Hammerstein obtenido.
0 1 2 3 4 5 6
x 10-3
2.4
2.6
2.8
3
3.2
3.4
3.6
Caudal NaOH (L/s)
pH
0 1 2 3 4 5 6
x 10-3
2.4
2.6
2.8
3
3.2
3.4
3.6
Variable de Entrada
Variable de S
alid
a
Descripción de la no linealidad estática
ROJO: Polinomio de aproximación. AZUL: Polinomio inicial.(E/S)

106
El polinomio que se obtiene (de color rojo) es muy aproximado y su función es:
Además del polinomio obtenido, es necesario encontrar el polinomio inverso, que será el más importante en el experimento real y entrará como un bloque anterior al proceso físico. Este polinomio inverso es obtenido solamente para la zona de trabajo y en este caso es:
Con la obtención de estos polinomios se concluye la etapa de la identificación de la no linealidad estática. Como siguiente paso es necesaria la identificación de la dinámica lineal del sistema.
4.4.1.2 Identificación de la dinámica lineal del sistema
La identificación de la dinámica lineal será de vital importancia para poder representar con mucha similitud el comportamiento transitorio del sistema y así tener completo el modelo obtenido de Hammerstein y proceder al diseño del controlador predictivo.
En este trabajo sobre el módulo experimental de pH se ingresó una señal PRS (Pseudo Random Signal) como se aprecia en la figura 4.16 de aproximadamente 4.5 horas, tratando de abarcar la dinámica en toda la zona de trabajo y con saltos en la señal de excitación diferentes en cada caso. El rango de ingreso de caudal de base se tomó entre 0 y 0.0064 L/s y con frecuencias diferentes.
Figura 4.16. Señal PRS empleada para la identificación de la dinámica.
0 2000 4000 6000 8000 10000 12000 14000 16000 180000
1
2
3
4
5
6x 10
-3
Tiempo (s)
Caudal NaOH (L/s)

107
La señal de salida con la aplicación de esta señal de entrada al proceso se muestra en la figura 4.17. La señal fue filtrada con un filtro pasabajo de primer orden para poder analizar adecuadamente su dinámica.
Figura 4.17. Señal de salida filtrada obtenida con la señal PRS ingresada.
La mitad de la señal de respuesta a la entrada PRS es aprovechada para identificar su dinámica mediante el uso de identificación con estructuras ARX. La otra mitad de la señal de respuesta es aprovechada para validar el modelo obtenido y encontrar los índices de prestación del modelo obtenido.
En la figura 4.18 se aprecia en un solo gráfico la parte de la señal PRS empleada para la identificación (superior izquierda), la variable intermedia –producto del tratamiento de la señal de entrada-(superior medio), la respuesta del sistema ante esta entrada (superior derecho), y la validación cruzada entre la respuesta real obtenida del proceso y la señal obtenida de la identificación del sistema (inferior).
En la validación cruzada se aprecian dos señales, la señal continua azul es la respuesta del sistema que debe aproximarse y la señal de salida interlineada roja es la salida del modelo obtenido.
0 2000 4000 6000 8000 10000 12000 14000 16000 180002.2
2.4
2.6
2.8
3
3.2
3.4
3.6
Tiempo (s)
pH

108
Figura 4.18. Validación del modelo obtenido.
En la figura 4.19 se muestra la validación cruzada en mayor magnitud. Gráficamente se puede apreciar que la señal de aproximación del modelo se asemeja en todo el rango a la señal de salida del proceso real, sin embargo es necesario corroborarlo con los resultados numéricos de los índices de prestación.
Figura 4.19 Validación cruzada del modelo obtenido.
0 2000 4000 6000 8000 100000
1
2
3
4
5
6x 10
-3 Entrada PRS
Tiempo (s)
Caudal NaOH
0 2000 4000 6000 8000 10000
2.6
2.8
3
3.2
3.4
3.6
3.8Variable Intermedia
Tiempo (s)
pH
0 2000 4000 6000 8000 10000
2.6
2.8
3
3.2
3.4Respuesta del sistema
Tiempo (s)
pH
0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7
x 104
2.6
2.8
3
3.2
3.4
Tiempo (s)
pH
Validación
0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7
x 104
2.5
2.6
2.7
2.8
2.9
3
3.1
3.2
3.3
3.4
Tiempo (s)
pH
Validación
109
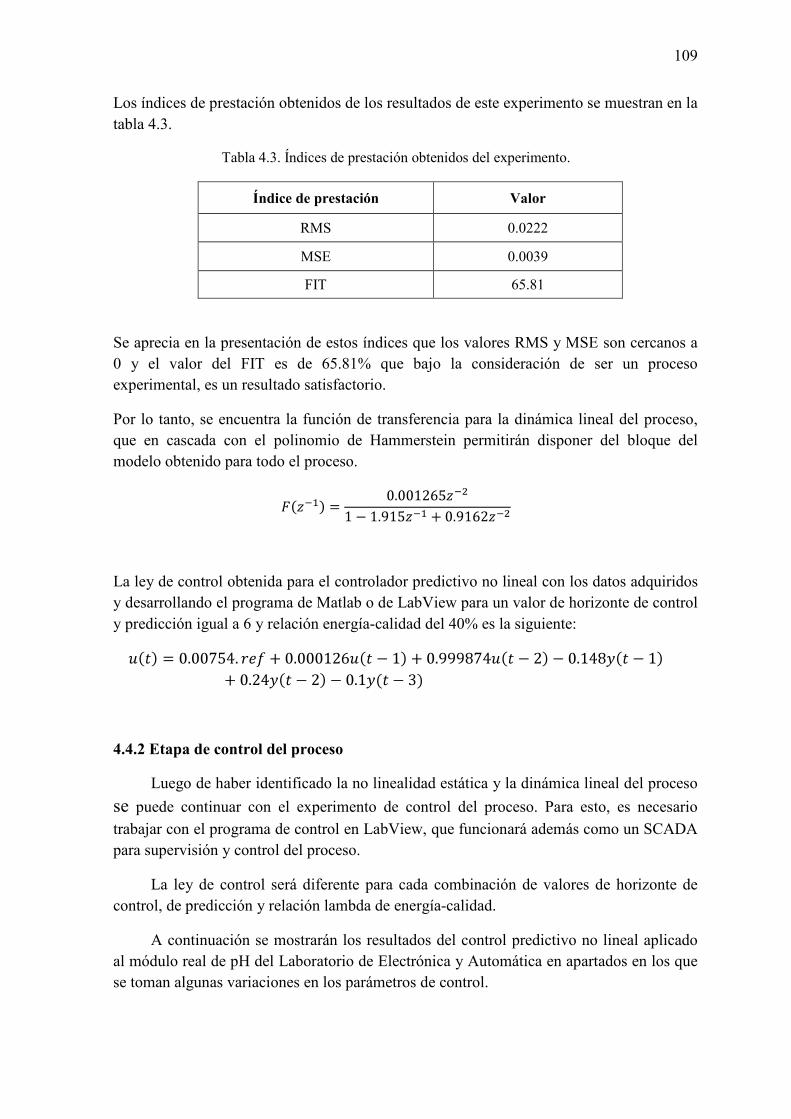
Los índices de prestación obtenidos de los resultados de este experimento se muestran en la tabla 4.3.
Tabla 4.3. Índices de prestación obtenidos del experimento.
Índice de prestación Valor
RMS 0.0222
MSE 0.0039
FIT 65.81
Se aprecia en la presentación de estos índices que los valores RMS y MSE son cercanos a 0 y el valor del FIT es de 65.81% que bajo la consideración de ser un proceso experimental, es un resultado satisfactorio.
Por lo tanto, se encuentra la función de transferencia para la dinámica lineal del proceso, que en cascada con el polinomio de Hammerstein permitirán disponer del bloque del modelo obtenido para todo el proceso.
La ley de control obtenida para el controlador predictivo no lineal con los datos adquiridos y desarrollando el programa de Matlab o de LabView para un valor de horizonte de control y predicción igual a 6 y relación energía-calidad del 40% es la siguiente:
4.4.2 Etapa de control del proceso
Luego de haber identificado la no linealidad estática y la dinámica lineal del proceso
se puede continuar con el experimento de control del proceso. Para esto, es necesario
trabajar con el programa de control en LabView, que funcionará además como un SCADA para supervisión y control del proceso.
La ley de control será diferente para cada combinación de valores de horizonte de control, de predicción y relación lambda de energía-calidad.
A continuación se mostrarán los resultados del control predictivo no lineal aplicado al módulo real de pH del Laboratorio de Electrónica y Automática en apartados en los que se toman algunas variaciones en los parámetros de control.

110
En primer lugar, se mostrará una simulación del proceso real a ejecutar, para luego poder compararlo con la respuesta real del sistema. Además, es necesario aclarar que los resultados de esta simulación se basan en la data obtenida de los modelos de no linealidad y dinámica experimentales. Por lo que, se obtendrá una idea cercana de lo que sucederá.
Primer Experimento.
Simulación. Los parámetros de control para esta simulación han sido los siguientes:
Horizonte de predicción : 6 Horizonte de control : 6 Peso energía – calidad : 3
La ley de control del proceso será por tanto:
Que será utilizada para el experimento real y para la simulación que se muestra en la figura 4.20.
Se han tomado 5 cambios de setpoint para observar como se comporta el sistema con saltos relativamente altos en variación de pH.
Figura 4.20. Simulación de la primera prueba de control realizada.(Nu=6, a=3).
4000 5000 6000 7000 8000 9000 10000 11000 12000 13000 14000
2.4
2.6
2.8
3
3.2
3.4
Tiempo (s)
pH

111
Los resultados numéricos de esta simulación se muestran en la tabla 4.4 en la que se presentan los parámetros importantes de la señal de salida.
Tabla 4.4. Parámetros de la señal de salida del proceso controlado.
Setpoint (pH) T. establecimiento(s) Overshoot (%)
0.3 2.6 1714.3 21.13
0.207 2.807 1591.84 13.8
0.193 3 1102.04 10.71
0.2 3.2 1106 11.03
0.207 3.407 1102 9.31
Como se puede observar el máximo valor de overshoot es del 21.13% en el primer cambio de setpoint, en este mismo cambio se presenta el mayor tiempo de establecimiento que es de 1700 segundos aproximadamente. Los siguientes valores de overshoot son menores y los tiempos de establecimiento también son menores que el inicial y menores que el tiempo de establecimiento a lazo abierto.
La señal de control que se genera durante la simulación se muestra en la figura 4.21.
Figura 4.21. Señal de comando aplicando el control mencionado.
4000 5000 6000 7000 8000 9000 10000 11000 12000 13000 14000
0
1
2
3
4
5
x 10-3
Tiempo (s)
Caudal NaOH

112
Tabla 4.5. Parámetros de la señal de control del sistema.
Setpoint (pH) (L/min) Overshoot (%)
0.3 2.6 0.19 41.7
0.207 2.807 0.095 20.45
0.193 3 0.0676 16.13
0.2 3.2 0.052 16.67
0.207 3.407 0.036 12.5
Sucede lo mismo en la señal de control, el overshoot presente en esta señal de accionamiento del actuador es mayor en el primer cambio de setpoint y luego son menores.
Experimento. Los resultados que se muestran en la figura 4.22 pertenecen al proceso experimental. Los parámetros de control y la ley de control han sido ya mencionados en la simulación de este experimento.
Figura 4.22. Señal de salida de la primera prueba de control realizada. (Nu=6, a=3).
En esta prueba se puede obviar el uso de un filtro debido a que no se presenta un ruido de mucha amplitud, tiene un valor de 0.04 en pH que corresponde aproximadamente al 0.77% respecto a su referencia. Sin embargo, debido a que en el experimento se trabajó con filtros digitales dentro del LabView, se puede apreciar en la figura 4.23 la señal de salida filtrada.
0 1000 2000 3000 4000 5000 6000 7000 8000 90002.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
Tiempo (s)
pH

113
Figura 4.23 Señal de salida filtrada.
Como se puede observar, el controlador funciona en su aplicación de controlar el proceso (la salida sigue a la referencia), sin embargo, es necesario analizar los parámetros obtenidos en la salida y en la señal de control.
En la tabla 4.6 se muestran los parámetros obtenidos de la señal de respuesta del sistema.
Tabla 4.6. Parámetros de la señal de salida del proceso de pH.
Setpoint (pH) T. establecimiento(s) Overshoot (%)
0.2 2.6 1500 3.63
0.2 2.8 1413.8 3
0.2 3 1137.93 1.18
0.2 3.2 896.55 2.73
0.2 3.4 448.28 4.55
Según lo prevista en la simulación, el tiempo de establecimiento del sistema en el primer cambio de setpoint es más elevado que en los siguientes cambios. Y se aprecia una mejora en los últimos tiempos de establecimiento, en los que se reduce casi hasta la tercera parte del que presenta a lazo abierto.
Es importante también tener en cuenta la señal de control que va a ingresar al actuador, que tendrá que ser adecuada para no causar problemas de saturación a la bomba y que ayude a ahorrar energía en el control del proceso.
0 1000 2000 3000 4000 5000 6000 7000 8000 9000
2.4
2.5
2.6
2.7
2.8
2.9
3
3.1
3.2
3.3
3.4
Tiempo (s)
pH

114
En la figura 4.24 se aprecia la señal de control fuertemente afectada por ruido, que al pasarse por un filtro digital pasabajo de primer orden, nos origina una señal aceptable que permite mejoras en el control y evitar altibajos.
Figura 4.24. Señal de comando sin filtrar aplicada en el proceso.
En la figura 4.25 se observa la señal filtrada, que como se puede apreciar, presenta un ruido de amplitudes menores respecto a la señal anterior y presenta mejores prestaciones para ingresar como señal de comando al actuador.
Figura 4.25. Señal filtrada ingresada al actuador en el proceso experimental.
0 1000 2000 3000 4000 5000 6000 7000 8000 90000.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Tiempo (s)
Caudal NaOH
0 1000 2000 3000 4000 5000 6000 7000 8000 90000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Tiempo (s)
Caudal NaOH

115
Los parámetros obtenidos de la señal de control son mostrados en la tabla 4.7.
Tabla 4.7. Parámetros de la señal de comando al actuador.
Setpoint (pH) (L/min) Overshoot (%)
0.2 2.6 0.128 31.58
0.2 2.8 0.097 26.67
0.2 3 0.068 22.12
0.2 3.2 0.035 0
0.2 3.4 0.067 136.36
Se puede observar con estos parámetros que la señal de control presenta un elevado valor de overshoot en el último cambio de referencia, costo ocasionado para lograr un tiempo de establecimiento del proceso menor.
Segundo Experimento.
Simulación. Los parámetros de control para esta simulación han sido los siguientes:
Horizonte de predicción : 8 Horizonte de control : 8 Peso energía – calidad : 1
La ley de control del proceso será por tanto:
Al aplicarla sobre el simulador se obtiene el resultado observado en la figura 4.26.

116
Figura 4.26 Simulación de señal de salida con parámetros Nu=8, λ=1.
Los parámetros más importantes de la señal de salida del simulador son mostrados en la tabla 4.8.
Tabla 4.8. Parámetros de salida más importantes.
Setpoint (pH) T. establecimiento(s) Overshoot (%)
0.085 2.392 1000 25
0.2296 2.67 1000 29.69
0.487 3.16 1000 30.7
0.1565 3 1000 16.48
0.304 2.696 1006.25 15.71
0.1914 2.5 1000 19.56
0.848 3.35 1250 24.74
En la simulación se estima que el máximo overshoot se producirá en el tercer salto de referencia y que los tiempos de establecimiento serán menores que los tiempos a lazo abierto.
Es importante acotar que en la simulación se ha trabajado con un solo conjunto de parámetros de control, mientras que el proceso real permite mediante el programa de
0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
x 104
2.4
2.6
2.8
3
3.2
3.4
Tiempo (s)
pH

117
control realizado, ir modificando estos parámetros (horizonte de predicción, relación energía-calidad) según la zona de trabajo y el tipo de respuesta que se requiera lograr.
La señal de control de esta simulación se muestra en la figura 4.27. Se observa con esta combinación de parámetros de control, que en la variación de referencia se genera un overshoot elevado.
Figura 4.27. Señal de comando obtenida con la simulación aplicada.
Los parámetros importantes de esta señal se aprecian en la tabla 4.9.
Tabla 4.9 Parámetros de la señal de comando.
Setpoint (pH) (L/min) Overshoot (%)
0.085 2.392 3.78 46.7
0.2296 2.67 15.43 35
0.487 3.16 16.86 20.41
0.1565 3 2.46 16
0.304 2.696 7.116 25.78
0.1914 2.5 6.68 39.29
0.848 3.35 17.742 101.71
0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
x 104
0
2
4
6
8
10
x 10-3
Tiempo (s)
Caudal NaOH

118
Experimento. Los resultados que se muestran en la figura 4.28 pertenecen al experimento. Los parámetros de control y la ley de control han sido ya mencionados en la previa simulación de este segundo experimento.
Se han aplicado señales de referencia en forma descendente y con saltos de setpoint
grandes, para observar el comportamiento del sistema en estas condiciones. Además, se ha trabajado en el cuarto cambio de referencia con una relación calidad-energía mayor, para evitar que se produzca una sobreoscilación que conduzca a las cercanías de los límites de la zona de trabajo.
Figura 4.28. Señal de salida de la segunda prueba experimental de control.
Gráficamente es notorio que el sistema responde adecuadamente al seguimiento del setpoint, pero es necesario además analizar las demás características de la respuesta del sistema.
La señal mostrada en la figura anterior no se encuentra filtrada, ya que el porcentaje de ruido alcanza valores del 0.96 % de amplitud. Sin embargo, se aprecia mejor esta señal cuando se filtra, tal y como se muestra en la figura 4.29.
0 1000 2000 3000 4000 5000 6000 7000
2.4
2.6
2.8
3
3.2
3.4
3.6
Tiempo (s)
Señal de salida (pH)

119
Figura 4.29. Señal de salida filtrada del segundo experimento de control.
Los resultados numéricos de los parámetros importantes de esta señal de salida son mostrados en la tabla 4.10
Tabla 4.10. Parámetros de la señal de salida del sistema.
Setpoint (pH) T. establecimiento(s) Overshoot (%)
0.43 3.16 1060 0
-0.16 3 878.8 0
-0.3 2.7 909.1 25
-0.2 2.5 1303 25
0.85 3.35 1030 27.9
Como se puede observar, en los dos primeros cambios de referencia, no existe overshoot, sin embargo, a partir del tercero, se genera un overshoot considerable que se acerca al 30%, que es un valor elevado.
El tiempo de establecimiento que se obtiene en la respuesta es menor que en el de lazo abierto y el seguimiento de la referencia está correctamente regulado.
1000 2000 3000 4000 5000 6000 7000
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
Tiempo (s)
pH

120
Figura 4.30 Señal de comando sin filtrar.
En la figura 4.31 se aprecia la señal de comando anterior después de pasar por un filtro pasabajo.
Figura 4.31 Señal de comando filtrada.
Los parámetros importantes de la señal de comando son mostrados en la tabla 4.11.
0 1000 2000 3000 4000 5000 6000 7000
0
0.1
0.2
0.3
0.4
0.5
Tiempo (s)
Entrada caudal NaOH (L/min)
0 1000 2000 3000 4000 5000 6000 7000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Tiempo (s)
Caudal NaOH (L/min)

121
Tabla 4.11 Parámetros de la señal de comando.
Tercer Experimento.
En este experimento se busca que el regulador predictivo tenga un comportamiento apropiado ante entradas de disturbios (rechazo a disturbios). Este resultado también depende directamente de los parámetros del controlador empleados.
La ley de control empleada en este experimento es la siguiente:
Para ingresar los disturbios en el módulo experimental se modificó el caudal de ácido ingresado, cambiándolo en un 17%. Se puede observar en la figura 4.32 que al aplicar el primer disturbio (t=1400s), la señal se incrementa hasta que el regulador puede controlar el sistema. Y al aplicar el segundo disturbio (t=2700s) la señal obtiene un incremento negativo hasta que nuevamente el controlador regula el sistema.
Al igual que en los casos anteriores se mostrará la señal sin filtrar (figura 4.32) y luego la señal filtrada (figura 4.33) obtenida al quitarle el ruido.
Setpoint (pH) (L/min) Overshoot (%)
0.43 3.16 0.15 0
-0.16 3 0.033 0
-0.3 2.7 0.12 65
-0.2 2.5 0.08 78.9
0.85 3.35 0.23 36.4

122
Figura 4.33. Señal de salida en prueba de rechazo a disturbios
Figura 4.33. Señal filtrada de salida en prueba de rechazo a disturbios.
Los parámetros de las señales de salida se muestran en la tabla 4.12. El tiempo de establecimiento es también menor que el establecimiento a lazo abierto, sin embargo, si
500 1000 1500 2000 2500 3000 3500 4000
2.4
2.45
2.5
2.55
2.6
2.65
2.7
2.75
2.8
2.85
2.9
Tiempo (s)
pH
Rechazo a disturbios
500 1000 1500 2000 2500 3000 3500 4000
2.4
2.45
2.5
2.55
2.6
2.65
2.7
2.75
2.8
2.85
Tiempo (s)
pH
Rechazo a disturbios

123
el sistema estuviese a lazo abierto, la forma de regular sería manual y bastante complicada para llevarlo a un punto de referencia deseado.
Tabla 4.12. Parámetros de señales de salida del proceso.
Setpoint (pH) T. establecimiento(s) Disturbio (%)
1400 2.7 850 -18
2700 2.7 1160 +18
La señal de comando del sistema se muestra en la figura 4.34, que además presenta altos niveles de ruido en la primera mitad del experimento. Por ello se recurre a utilizar un filtro de primer orden y se almacena la información para obtener la señal mostrada en la figura 4.35
Figura 4.34. Señal de comando ingresada al actuador.
0 500 1000 1500 2000 2500 3000 3500 4000 45000.05
0.1
0.15
0.2
0.25
0.3
Tiempo (s)
Caudal NaOH (L/m
in)

124
Figura 4.35. Señal de comando filtrada de ingreso al actuador.
Los parámetros de esta señal de comando son mostrados en la tabla 4.13
Tabla 4.13. Parámetros de la señal de salida.
Setpoint (pH) (L/min) Disturbio (%)
1400 2.7 0.09 18
2700 2.7 0.06 18
Como se ha podido mostrar, el regulador de pH diseñado responde al control y rechazo a disturbio con muy buenas prestaciones.
0 500 1000 1500 2000 2500 3000 3500 4000
0.05
0.1
0.15
0.2
0.25
Tiempo (s)
Caudal NaOH (L/min)

125
Conclusiones
Se logró el objetivo de diseñar e implementar un regulador predictivo no lineal basado en modelación Hammerstein con aproximación polinómica que funcione eficientemente en una zona de trabajo escogida, y controle con buenas prestaciones los cambios de referencia y los disturbios que puedan presentarse.
De los experimentos realizados se puede destacar la gran importancia de realizar las pruebas con mucha precisión, porque el modelo que se obtiene es la base para el diseño del controlador predictivo, además la aproximación polinómica exige mucha exactitud y la dinámica de un sistema describe el transitorio del mismo que debe ser representada de manera adecuada.
La longitud de los experimentos puede ser variada dependiendo del proceso que se esté analizando. En este caso es suficiente realizar un experimento pero que presente las características más importantes de las señales de salida ante distintos tipos de excitación de entrada.
Las simulaciones realizadas en el entorno de MATLAB permitieron obtener unos resultados similares a los obtenidos experimentalmente. Para cada aplicación distinta de control de pH se debe simular el las salidas requeridas para asignar los parámetros de control predictivo y obtener los resultados requeridos, cuidando siempre la no saturación del actuador.
El haber trabajado con un módulo con instrumentación industrial permite tener una idea de que el proceso puede implementarse a nivel industrial y puede ser controlado eficientemente. Además, en el desarrollo del proceso experimental, se aprende de estos instrumentos, sus fallas frecuentes y de las opciones de mejora de los mismos.
Los métodos de control que se pueden aplicar a este módulo de laboratorio son variados, obviamente unos mejores que otros, dependiendo además de la instrumentación de la que se disponga. Ya se ha realizado un trabajo de control PID sobre este módulo y se obtuvieron buenos resultados. Ahora se aplica un control predictivo no lineal, que adiciona la posibilidad de regular parámetros de la predominancia energética o de calidad, además de los horizontes de control y predicción.
Las aplicaciones industriales en su mayoría presentan un comportamiento no lineal, y al aproximarlo a uno lineal causa deficiencias en el control del proceso. Una de las técnicas de control que permiten enfrentar esta problemática ha sido probada en este módulo arrojando buenos resultados. Esto deja entrever que las técnicas de control no lineal se están desarrollando rápidamente con resultados satisfactorios.

126

127
Bibliografía
[1] Sergio Garcés Castañeda, “Diseño e implementación de un módulo de laboratorio para el control PID de pH”. Tesis de título. Perú, 2008.
[2] Whitten Kenneth W., Davis, Raymond E., Peck, M.Larry. Química General, Mc Graw Hill Interamericana de España, 5ª.ed. 1998.
[3] William Ipanaqué, César de Prada, Paul Falen, “Control Predictivo no lineal de un evaporador multietapa de la industria azucarera usando modelos Hammerstein y Wiener”, 2008.
[4] William Ipanaqué, Una técnica para el futuro de la Industria, Edición de la Universidad de Piura, ISBN 9972-48-097-6, 2005.
[5] Zaida Purizaga Céspedes, “Control predictivo no Lineal basado en modelos Hammerstein y Wiener para pH”. Tesis de título. Perú, 2007.
[6] Rodríguez Arisméndiz, Rodolfo, “Construcción y diseño de un pHmetro digital”. Tesis de Título. Universidad de Piura 1985.
[7] Michael A. Henson. Nonlinear model predictive control: current status and future
directions, Departament of Chemical Engineering, Louisiana State University, U.S.A., 1998.
[8] Jozef Vörös, Recursive identification of Hammerstein Systems with polynomial
nonlinearities, Journal of Electrical Engineering, Vol 57 Nº 1206 [9] Feng Ding, Tongwen Chen, Identification of Hammerstin nonlinear ARMAX
systems, 2005 [10] Guo, Fen. (2004). A new identification method for Wiener and Hammerstein
systems. 1ª ed. Alemania: Print Ausgabe. [11] Ikonem, Enso & Najim, Kaddour. (2002). Advanced process identification and
control. 1ª ed. New York: Marcel Dekker, Inc. [12] Santos dos Santos, José E. (2003). Control predictivo no lineal para sistemas
Hammerstein. Tesis doctoral. Brasil: Universidad Federal Santa Catarina. [13] Er Bai Wei. “An optimal two-stage identification algorithm for Hammerstein –
Wiener nolinear systems”. Pargamon-Automática Vol. 34: 33-338, 1998 [14] Paul Falen Valdez, “Simulación y control predictivo no lineal basado en modelos
Hammerstein y Wiener en un evaporador”. Tesis de título. Perú, 2008.