análisis de imágenes de mastografía y biopsia asistida...
TRANSCRIPT
Análisis de Imágenes de Mastografía y Biopsia Asistida por Computadora en la Detección de Cáncer de Mama
Fernando Arámbula, Nidiyare Hevia, Eric Lira, Cresencio García, Rosa Ma. Quispe, Bartolomé Reyes Centro de Ciencias Aplicadas y Desarrollo Tecnológico,
Universidad Nacional Autónoma de MéxicoMéxico, D.F., 04510
Eric Hazan LasriInstituto Nacional de Rehabilitación
México, D.F., 14389
Resumen—Es este documento reportamos los resultados más recientes sobre nuestro sistema asistido por computadora para la toma de biopsias de tumores de mama, así como para el análisis digital de imágenes de mastografía. El sistema se basa en el seguimiento de imágenes de ultrasonido de mama, donde una reconstrucción tridimensional del volumen de ultrasonido es realizada a partir de un conjunto de imágenes adquiridas con una sonda calibrada espacialmente. Este sistema ha sido diseñado para asistir al radiólogo durante el proceso de una biopsia de mama, así como un sistema de entrenamiento para residentes en radiología. Se implementaron a su vez algoritmos para el análisis automático de imágenes con el propósito de detectar micro-calcificaciones o tumores que se encuentren presentes en una imagen digital de mastografía. En primer lugar presentamos el desarrollo del prototipo del sistema y las pruebas realizadas sobre un maniquí que simula una mama con un tumor en su interior, el maniquí fue realizado con alcohol polivinílico; y en segundo lugar, también reportamos los resultados de la detección automática de micro-calcificaciones y tumores en una mastografía digital.
Palabras clave – Cirugía Asistida por Computadora, Cáncer de mama, Tumor, Micro-calcificaciones, Mastografía
I. INTRODUCCIÓN.
El cáncer de mama es una de las principales preocupaciones médicas, debido a que en países desarrollados el cáncer de mama ha llegado a ser una de las principales causas de muerte en la mujer. Actualmente el 45% de nuevos casos de cáncer de mama han sido diagnosticados en mujeres jóvenes [1]. Programas del sector salud, donde se usa la mastografía por rayos X, han sido promovidos mundialmente con la intención de detectar el cáncer de mama de manera temprana, debido a que este tipo de imagenología puede proveer una alta resolución y sensibilidad para el caso de la presencia de micro-calcificaciones, o bien, en general, buen contraste para detección de masas tumorales. Sin embargo, en el caso de mujeres jóvenes, debido a la presencia de tejido mamario denso, una mastografía por rayos X puede resultar con un contraste muy pobre.
Ahora bien, estudios recientes han demostrado que el ultrasonido puede detectar tumores de mama con una alta sensibilidad y especificidad [2][3]. Uno de los métodos para el diagnóstico de cáncer que se ha desarrollado recientemente utiliza la combinación de imágenes de mastografía y ultrasonido [4]. Para el caso de mamas con tejido mamario denso, el ultrasonido es el tipo de imagenología que se prefiere para guiar un proceso de toma de biopsia de tumores mamarios. El ultrasonido tiene otras ventajas sobre las imágenes de mastografía en lo relacionado a la toma de biopsia, esto debido a que el paciente no es expuesto a radiación ionizante, relativamente es de más bajo costo y es una modalidad de imagenología compacta y flexible.
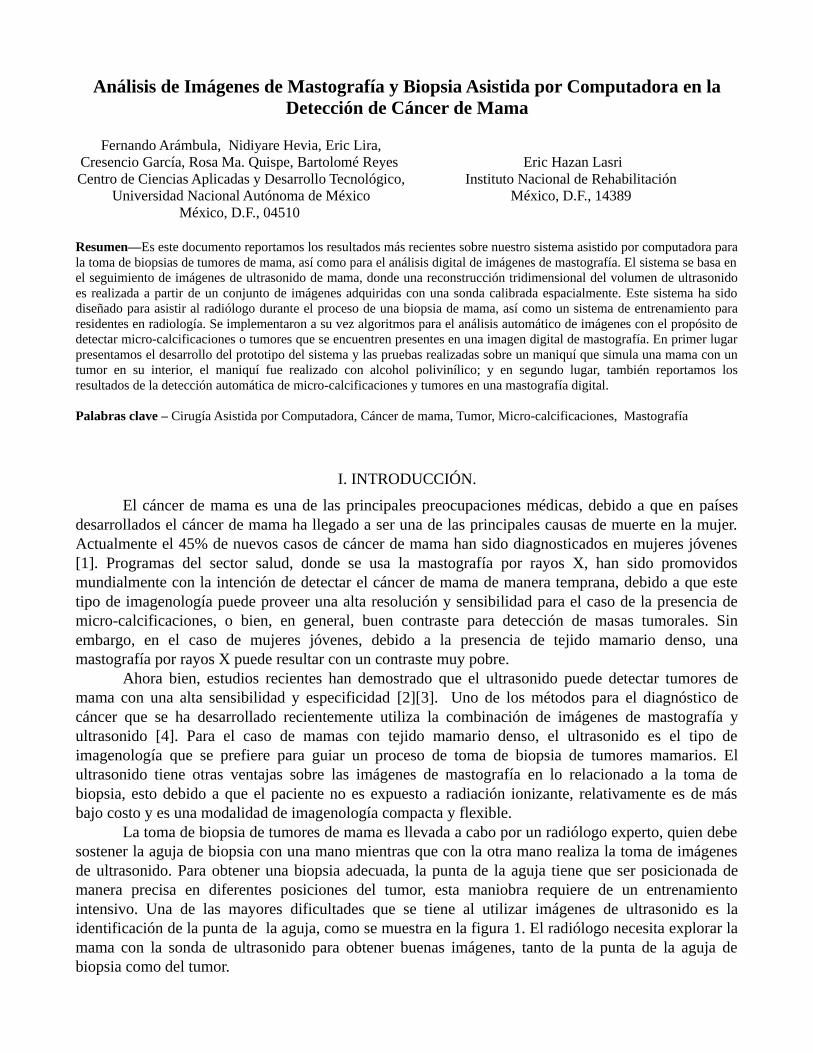
La toma de biopsia de tumores de mama es llevada a cabo por un radiólogo experto, quien debe sostener la aguja de biopsia con una mano mientras que con la otra mano realiza la toma de imágenes de ultrasonido. Para obtener una biopsia adecuada, la punta de la aguja tiene que ser posicionada de manera precisa en diferentes posiciones del tumor, esta maniobra requiere de un entrenamiento intensivo. Una de las mayores dificultades que se tiene al utilizar imágenes de ultrasonido es la identificación de la punta de la aguja, como se muestra en la figura 1. El radiólogo necesita explorar la mama con la sonda de ultrasonido para obtener buenas imágenes, tanto de la punta de la aguja de biopsia como del tumor.
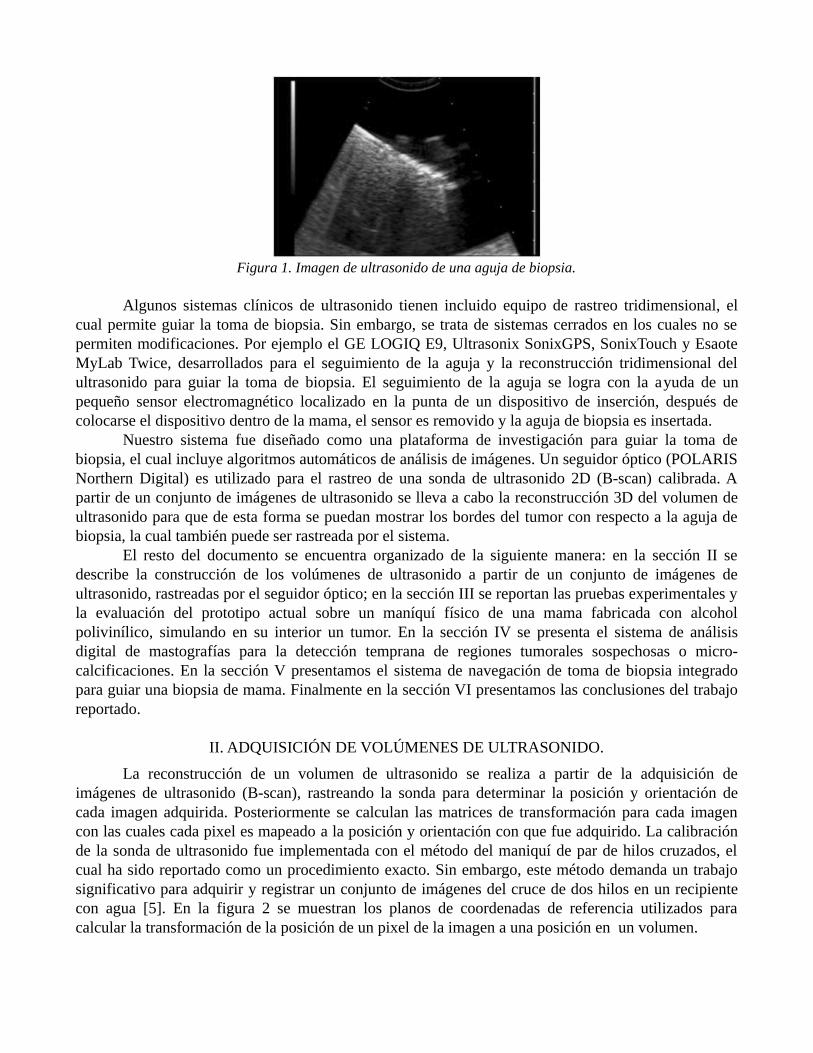
Figura 1. Imagen de ultrasonido de una aguja de biopsia.
Algunos sistemas clínicos de ultrasonido tienen incluido equipo de rastreo tridimensional, el cual permite guiar la toma de biopsia. Sin embargo, se trata de sistemas cerrados en los cuales no se permiten modificaciones. Por ejemplo el GE LOGIQ E9, Ultrasonix SonixGPS, SonixTouch y Esaote MyLab Twice, desarrollados para el seguimiento de la aguja y la reconstrucción tridimensional del ultrasonido para guiar la toma de biopsia. El seguimiento de la aguja se logra con la ayuda de un pequeño sensor electromagnético localizado en la punta de un dispositivo de inserción, después de colocarse el dispositivo dentro de la mama, el sensor es removido y la aguja de biopsia es insertada.
Nuestro sistema fue diseñado como una plataforma de investigación para guiar la toma de biopsia, el cual incluye algoritmos automáticos de análisis de imágenes. Un seguidor óptico (POLARIS Northern Digital) es utilizado para el rastreo de una sonda de ultrasonido 2D (B-scan) calibrada. A partir de un conjunto de imágenes de ultrasonido se lleva a cabo la reconstrucción 3D del volumen de ultrasonido para que de esta forma se puedan mostrar los bordes del tumor con respecto a la aguja de biopsia, la cual también puede ser rastreada por el sistema.
El resto del documento se encuentra organizado de la siguiente manera: en la sección II se describe la construcción de los volúmenes de ultrasonido a partir de un conjunto de imágenes de ultrasonido, rastreadas por el seguidor óptico; en la sección III se reportan las pruebas experimentales y la evaluación del prototipo actual sobre un maníquí físico de una mama fabricada con alcohol polivinílico, simulando en su interior un tumor. En la sección IV se presenta el sistema de análisis digital de mastografías para la detección temprana de regiones tumorales sospechosas o micro-calcificaciones. En la sección V presentamos el sistema de navegación de toma de biopsia integrado para guiar una biopsia de mama. Finalmente en la sección VI presentamos las conclusiones del trabajo reportado.
II. ADQUISICIÓN DE VOLÚMENES DE ULTRASONIDO.
La reconstrucción de un volumen de ultrasonido se realiza a partir de la adquisición de imágenes de ultrasonido (B-scan), rastreando la sonda para determinar la posición y orientación de cada imagen adquirida. Posteriormente se calculan las matrices de transformación para cada imagen con las cuales cada pixel es mapeado a la posición y orientación con que fue adquirido. La calibración de la sonda de ultrasonido fue implementada con el método del maniquí de par de hilos cruzados, el cual ha sido reportado como un procedimiento exacto. Sin embargo, este método demanda un trabajo significativo para adquirir y registrar un conjunto de imágenes del cruce de dos hilos en un recipiente con agua [5]. En la figura 2 se muestran los planos de coordenadas de referencia utilizados para calcular la transformación de la posición de un pixel de la imagen a una posición en un volumen.
u
v
y
x
z
y
x
z
us coordinatesoptical tracker coordinates
pT
i
tT
p
Figura 2. Calibración de la sonda de ultrasonido.
El origen está localizado en el objeto de referencia del seguidor óptico. Entonces las coordenadas homogéneas de la posición 3D del punto de cruce, en el recipiente de agua, ([x,y,z,1]T ) están dadas por la ecuación (1):
(1)
donde (u,v) son las coordenadas del pixel (renglón, columna) del punto de cruce en el plano de la imagen; (sx,sy) son los correspondientes factores de escala, los cuales transforman de (renglón,columna) a (m); pTi es la rejilla de la matriz de transformación que mapea un pixel perteneciente al plano de la imagen hacia el plano de referencia perteneciente a la sonda de ultrasonido; tTp es la matriz rígida de transformaciones que mapea el plano de referencia de la sonda de ultrasonido al plano de referencia del seguidor óptico [6]. Los ángulos y vectores de desplazamiento de tTp son medidos por el seguidor óptico; y las incógnitas de la ecuación (1) son los 3 ángulos y las 3 componentes del vector de desplazamiento de pTi , así como los dos factores de escala sx, sy. Un conjunto sobredeterminado de ecuaciones fue construido a partir de 5 imágenes de ultrasonido del punto de intersección de los hilos. Por cada imagen se construyeron 3 ecuaciones, lo cual nos da un sistema de 15 ecuaciones con 8 incógnitas. El sistema se resolvió numéricamente usando el método de Levenberg-Marquardt. Una vez que tenemos los valores de los factores de escalamiento, así como los valores de la matriz de transformación pTi, junto con la matriz de transformación que nos provee el seguidor óptico tTp, podemos entonces mapear un pixel (u,v) de la imagen de ultrasonido a nuestro volumen de referencia utilizando la ecuación (1) [6].
III. PRUEBAS EXPERIMENTALES.
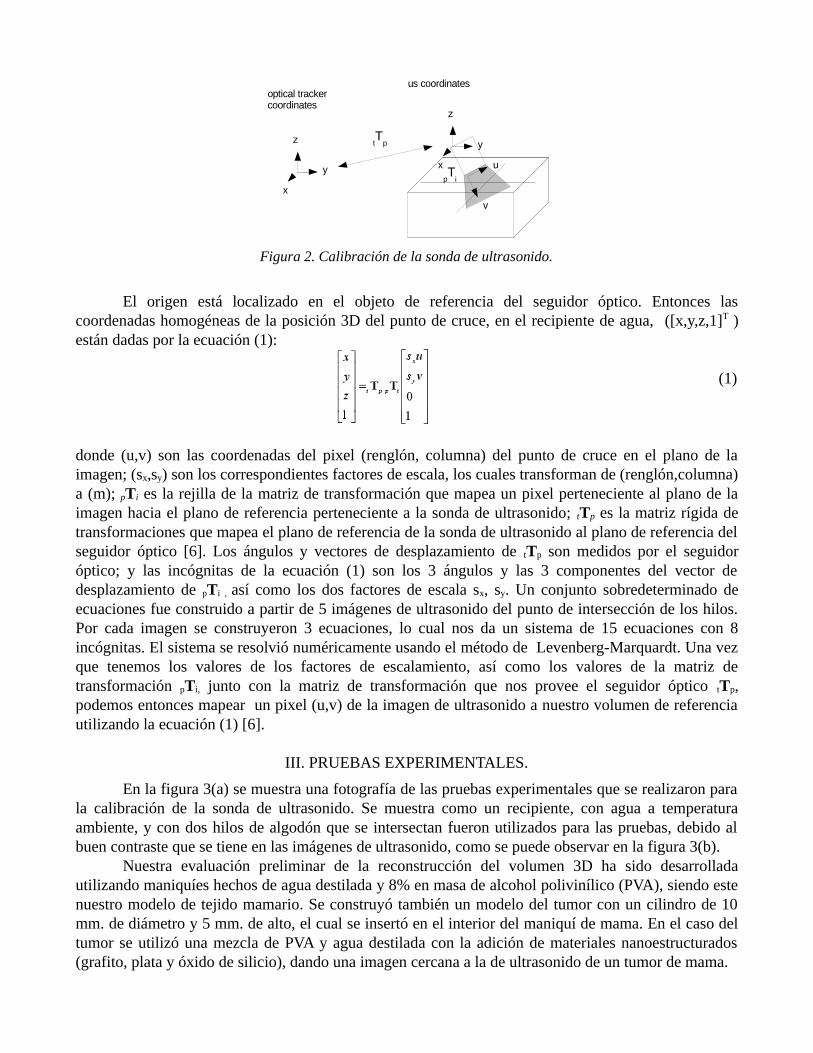
En la figura 3(a) se muestra una fotografía de las pruebas experimentales que se realizaron para la calibración de la sonda de ultrasonido. Se muestra como un recipiente, con agua a temperatura ambiente, y con dos hilos de algodón que se intersectan fueron utilizados para las pruebas, debido al buen contraste que se tiene en las imágenes de ultrasonido, como se puede observar en la figura 3(b).
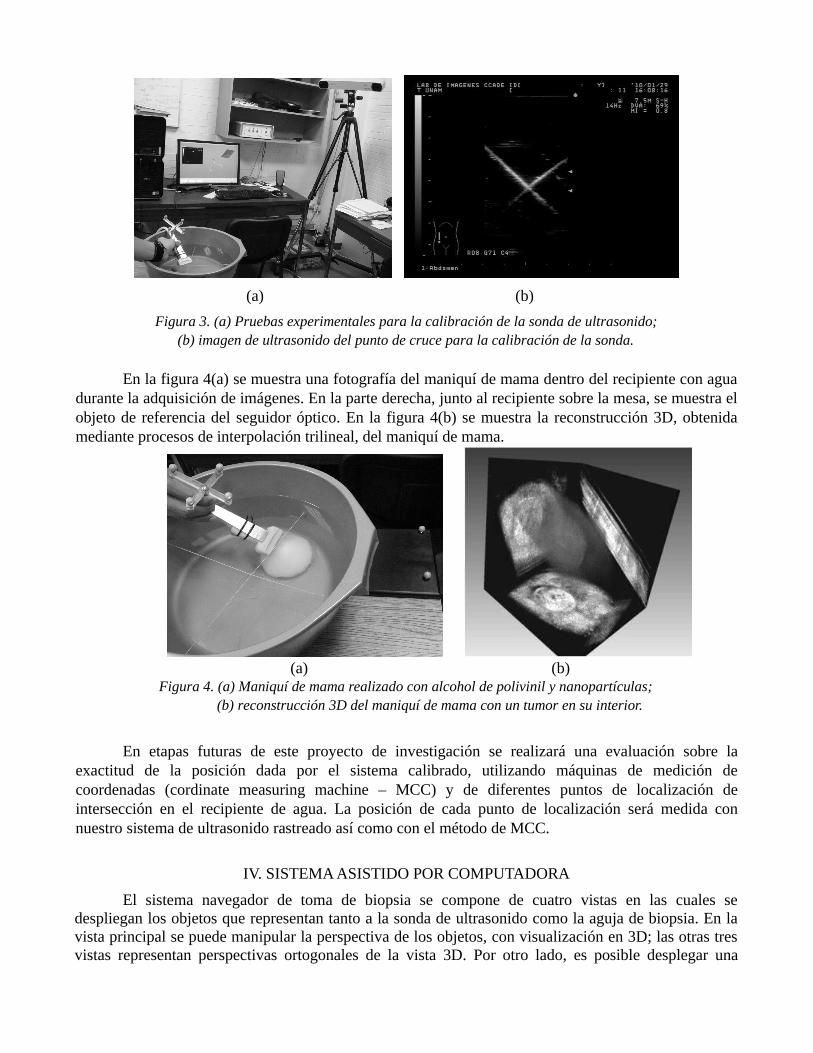
Nuestra evaluación preliminar de la reconstrucción del volumen 3D ha sido desarrollada utilizando maniquíes hechos de agua destilada y 8% en masa de alcohol polivinílico (PVA), siendo este nuestro modelo de tejido mamario. Se construyó también un modelo del tumor con un cilindro de 10 mm. de diámetro y 5 mm. de alto, el cual se insertó en el interior del maniquí de mama. En el caso del tumor se utilizó una mezcla de PVA y agua destilada con la adición de materiales nanoestructurados (grafito, plata y óxido de silicio), dando una imagen cercana a la de ultrasonido de un tumor de mama.
(a) (b)
Figura 3. (a) Pruebas experimentales para la calibración de la sonda de ultrasonido;(b) imagen de ultrasonido del punto de cruce para la calibración de la sonda.
En la figura 4(a) se muestra una fotografía del maniquí de mama dentro del recipiente con agua durante la adquisición de imágenes. En la parte derecha, junto al recipiente sobre la mesa, se muestra el objeto de referencia del seguidor óptico. En la figura 4(b) se muestra la reconstrucción 3D, obtenida mediante procesos de interpolación trilineal, del maniquí de mama.
(a) (b)
Figura 4. (a) Maniquí de mama realizado con alcohol de polivinil y nanopartículas;(b) reconstrucción 3D del maniquí de mama con un tumor en su interior.
En etapas futuras de este proyecto de investigación se realizará una evaluación sobre la exactitud de la posición dada por el sistema calibrado, utilizando máquinas de medición de coordenadas (cordinate measuring machine – MCC) y de diferentes puntos de localización de intersección en el recipiente de agua. La posición de cada punto de localización será medida con nuestro sistema de ultrasonido rastreado así como con el método de MCC.
IV. SISTEMA ASISTIDO POR COMPUTADORA
El sistema navegador de toma de biopsia se compone de cuatro vistas en las cuales se despliegan los objetos que representan tanto a la sonda de ultrasonido como la aguja de biopsia. En la vista principal se puede manipular la perspectiva de los objetos, con visualización en 3D; las otras tres vistas representan perspectivas ortogonales de la vista 3D. Por otro lado, es posible desplegar una
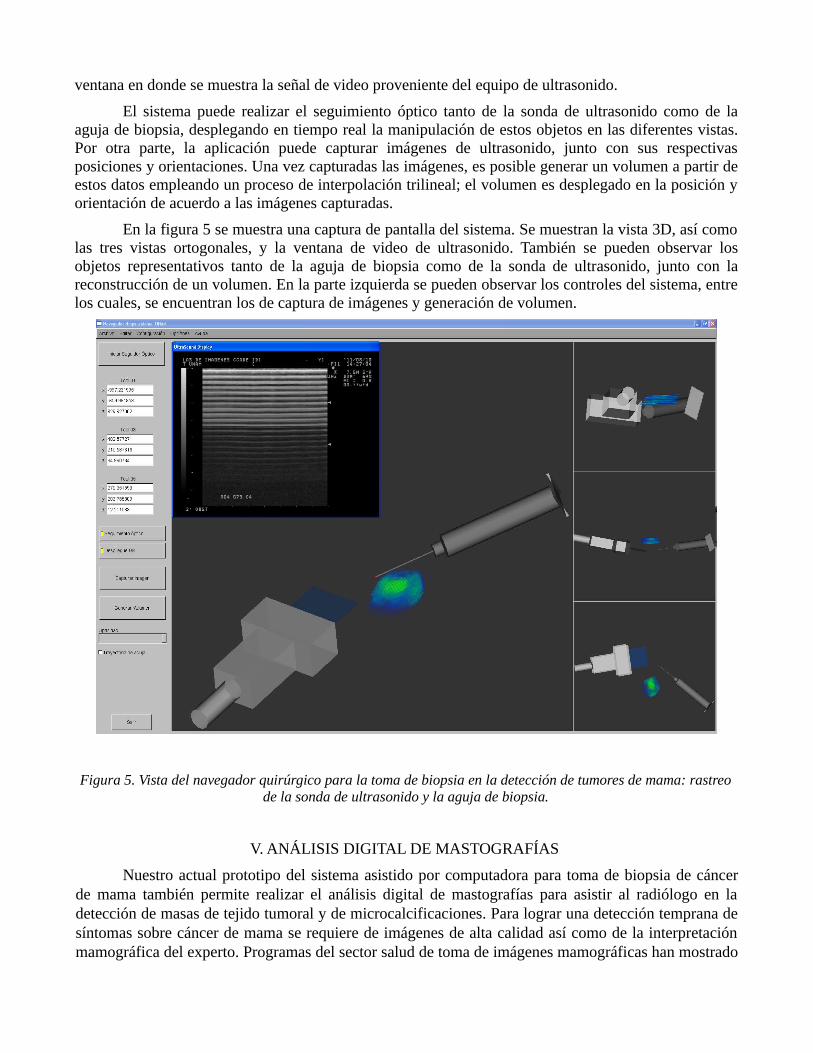
ventana en donde se muestra la señal de video proveniente del equipo de ultrasonido.
El sistema puede realizar el seguimiento óptico tanto de la sonda de ultrasonido como de la aguja de biopsia, desplegando en tiempo real la manipulación de estos objetos en las diferentes vistas. Por otra parte, la aplicación puede capturar imágenes de ultrasonido, junto con sus respectivas posiciones y orientaciones. Una vez capturadas las imágenes, es posible generar un volumen a partir de estos datos empleando un proceso de interpolación trilineal; el volumen es desplegado en la posición y orientación de acuerdo a las imágenes capturadas.
En la figura 5 se muestra una captura de pantalla del sistema. Se muestran la vista 3D, así como las tres vistas ortogonales, y la ventana de video de ultrasonido. También se pueden observar los objetos representativos tanto de la aguja de biopsia como de la sonda de ultrasonido, junto con la reconstrucción de un volumen. En la parte izquierda se pueden observar los controles del sistema, entre los cuales, se encuentran los de captura de imágenes y generación de volumen.
Figura 5. Vista del navegador quirúrgico para la toma de biopsia en la detección de tumores de mama: rastreo de la sonda de ultrasonido y la aguja de biopsia.
V. ANÁLISIS DIGITAL DE MASTOGRAFÍAS
Nuestro actual prototipo del sistema asistido por computadora para toma de biopsia de cáncer de mama también permite realizar el análisis digital de mastografías para asistir al radiólogo en la detección de masas de tejido tumoral y de microcalcificaciones. Para lograr una detección temprana de síntomas sobre cáncer de mama se requiere de imágenes de alta calidad así como de la interpretación mamográfica del experto. Programas del sector salud de toma de imágenes mamográficas han mostrado
ser efectivos en la disminución de mortalidad por cáncer de mama a través de la detección y tratamiento en etapas tempranas del cáncer de mama [7]. Los aspectos de realce, que nosotros analizamos e implementamos en nuestro sistema para detectar regiones tumorales o micro-calcificaciones, están basados en el uso del filtro IRIS y operadores del gradiente, respectivamente.
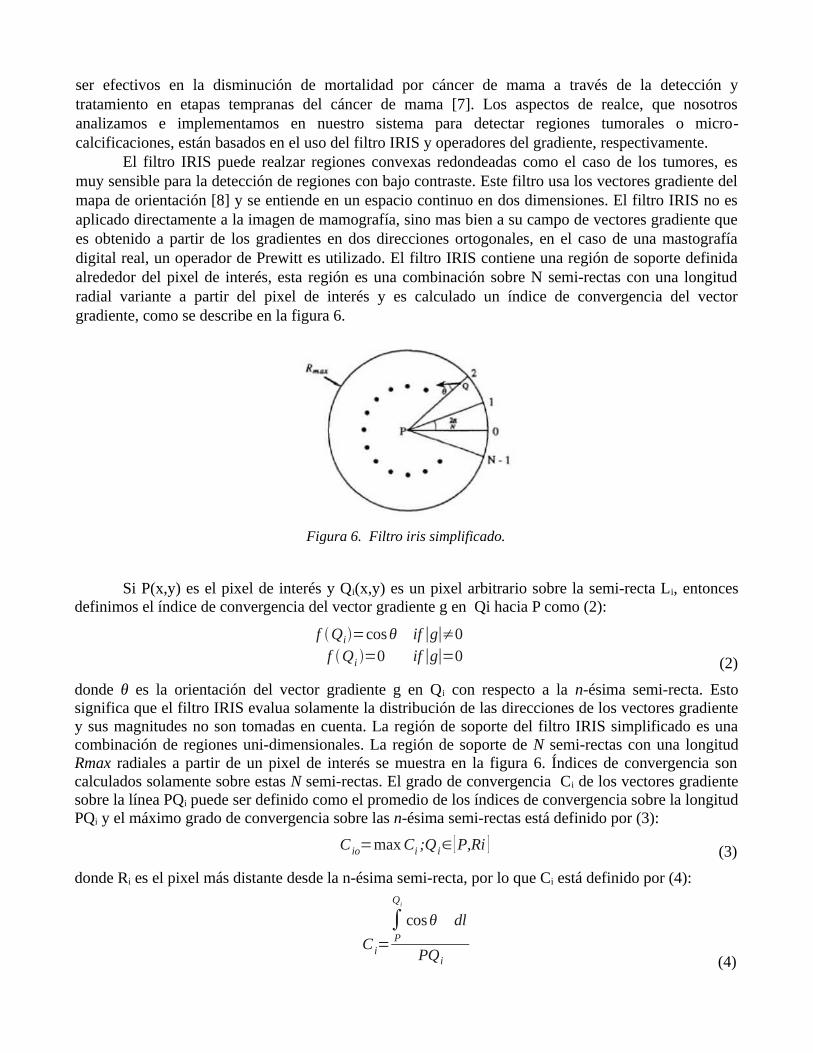
El filtro IRIS puede realzar regiones convexas redondeadas como el caso de los tumores, es muy sensible para la detección de regiones con bajo contraste. Este filtro usa los vectores gradiente del mapa de orientación [8] y se entiende en un espacio continuo en dos dimensiones. El filtro IRIS no es aplicado directamente a la imagen de mamografía, sino mas bien a su campo de vectores gradiente que es obtenido a partir de los gradientes en dos direcciones ortogonales, en el caso de una mastografía digital real, un operador de Prewitt es utilizado. El filtro IRIS contiene una región de soporte definida alrededor del pixel de interés, esta región es una combinación sobre N semi-rectas con una longitud radial variante a partir del pixel de interés y es calculado un índice de convergencia del vector gradiente, como se describe en la figura 6.
Figura 6. Filtro iris simplificado.
Si P(x,y) es el pixel de interés y Qi(x,y) es un pixel arbitrario sobre la semi-recta Li, entonces definimos el índice de convergencia del vector gradiente g en Qi hacia P como (2):
f Qi=cosθ if ∣g∣≠0f Qi =0 if ∣g∣=0 (2)
donde θ es la orientación del vector gradiente g en Qi con respecto a la n-ésima semi-recta. Esto significa que el filtro IRIS evalua solamente la distribución de las direcciones de los vectores gradiente y sus magnitudes no son tomadas en cuenta. La región de soporte del filtro IRIS simplificado es una combinación de regiones uni-dimensionales. La región de soporte de N semi-rectas con una longitud Rmax radiales a partir de un pixel de interés se muestra en la figura 6. Índices de convergencia son calculados solamente sobre estas N semi-rectas. El grado de convergencia Ci de los vectores gradiente sobre la línea PQi puede ser definido como el promedio de los índices de convergencia sobre la longitud PQi y el máximo grado de convergencia sobre las n-ésima semi-rectas está definido por (3):
C io=max Ci ;Q i∈[P,Ri ] (3)
donde Ri es el pixel más distante desde la n-ésima semi-recta, por lo que Ci está definido por (4):
C i=
∫P
Qi
cosθ dl
PQi (4)
La salida del filtro IRIS en el pixel de interés P(x,y) está definida como el promedio C io por (5) y el valor de salida C(x,y) está comprendido entre -1 y 1:
C x,y =
1N∑C io
(5)
El tamaño y la forma de la región de soporte del filtro IRIS cambia para cada posición de P; si el campo de los vectores gradiente es uniforme entonces el filtro IRIS mostrará una salida igual a cero [9].
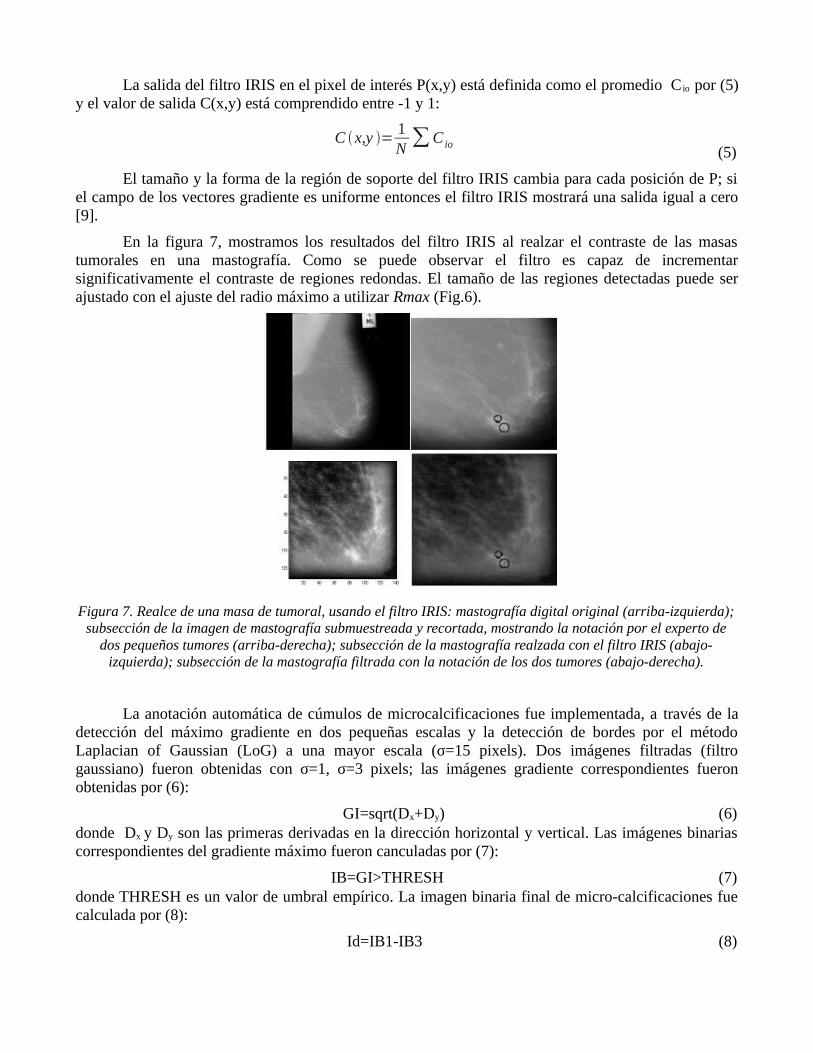
En la figura 7, mostramos los resultados del filtro IRIS al realzar el contraste de las masas tumorales en una mastografía. Como se puede observar el filtro es capaz de incrementar significativamente el contraste de regiones redondas. El tamaño de las regiones detectadas puede ser ajustado con el ajuste del radio máximo a utilizar Rmax (Fig.6).
Figura 7. Realce de una masa de tumoral, usando el filtro IRIS: mastografía digital original (arriba-izquierda); subsección de la imagen de mastografía submuestreada y recortada, mostrando la notación por el experto de
dos pequeños tumores (arriba-derecha); subsección de la mastografía realzada con el filtro IRIS (abajo-izquierda); subsección de la mastografía filtrada con la notación de los dos tumores (abajo-derecha).
La anotación automática de cúmulos de microcalcificaciones fue implementada, a través de la detección del máximo gradiente en dos pequeñas escalas y la detección de bordes por el método Laplacian of Gaussian (LoG) a una mayor escala (σ=15 pixels). Dos imágenes filtradas (filtro gaussiano) fueron obtenidas con σ=1, σ=3 pixels; las imágenes gradiente correspondientes fueron obtenidas por (6):
GI=sqrt(Dx+Dy) (6)donde Dx y Dy son las primeras derivadas en la dirección horizontal y vertical. Las imágenes binarias correspondientes del gradiente máximo fueron canculadas por (7):
IB=GI>THRESH (7)donde THRESH es un valor de umbral empírico. La imagen binaria final de micro-calcificaciones fue calculada por (8):
Id=IB1-IB3 (8)
donde IB1 e IB3 son las imágenes binarias de gradiente máximo, calculado para σ=1, σ=3 pixels. Id es una imagen binaria de las micro-calcificaciones sin la mayor parte de los artefactos producidos por regiones relativamente grandes de pixeles brillantes.
A veces restan aún algunos artefactos debido a fuertes bordes presentes en la mastografía original. Por lo que nosotros restamos una imagen de bordes de nuestra imagen Id resultante por (9):
IO=(Id-Ie)>0 (9)donde Ie es una imagen binaria de bordes calculada con el filtro LoG (σ = 15 pixeles) y la detección con el cruce-cero.
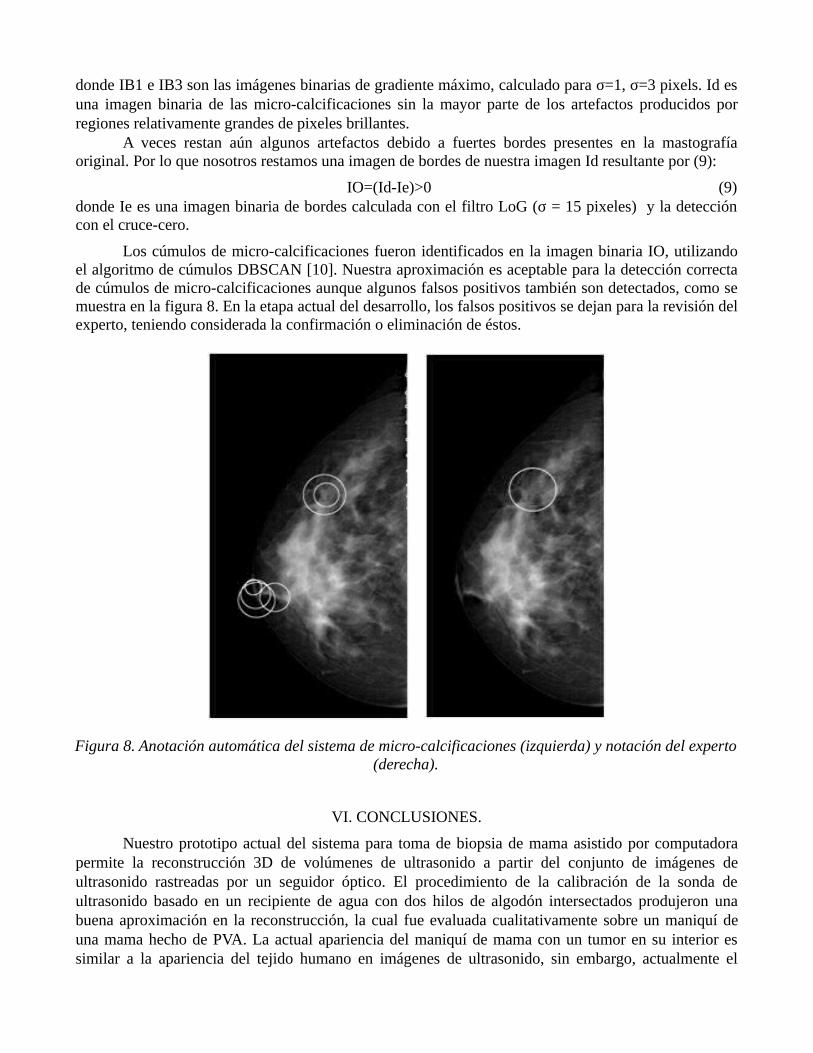
Los cúmulos de micro-calcificaciones fueron identificados en la imagen binaria IO, utilizando el algoritmo de cúmulos DBSCAN [10]. Nuestra aproximación es aceptable para la detección correcta de cúmulos de micro-calcificaciones aunque algunos falsos positivos también son detectados, como se muestra en la figura 8. En la etapa actual del desarrollo, los falsos positivos se dejan para la revisión del experto, teniendo considerada la confirmación o eliminación de éstos.
Figura 8. Anotación automática del sistema de micro-calcificaciones (izquierda) y notación del experto (derecha).
VI. CONCLUSIONES.
Nuestro prototipo actual del sistema para toma de biopsia de mama asistido por computadora permite la reconstrucción 3D de volúmenes de ultrasonido a partir del conjunto de imágenes de ultrasonido rastreadas por un seguidor óptico. El procedimiento de la calibración de la sonda de ultrasonido basado en un recipiente de agua con dos hilos de algodón intersectados produjeron una buena aproximación en la reconstrucción, la cual fue evaluada cualitativamente sobre un maniquí de una mama hecho de PVA. La actual apariencia del maniquí de mama con un tumor en su interior es similar a la apariencia del tejido humano en imágenes de ultrasonido, sin embargo, actualmente el
tumor se muestra más brillante que el fondo, lo cual es opuesto en una imagen real donde un tumor se muestra oscuro dentro del tejido mamario que es más brillante. En trabajos futuros se piensa mejorar la apariencia del tumor.
El sistema de toma de biopsias pretende considerar en futuras etapas las deformaciones que presenta el tejido mamario durante la realización de la intervención, así como un análisis automático de imágenes de mamografía. Por otro lado, se pretende evaluar la precisión del sistema para la localización de un tumor utilizando una maquina de medición de coordenadas.
Los resultados preliminares sobre el realce de tumores utilizando el filtro IRIS son prometedores, ya que un alto contraste puede ser obtenido para cambios sutiles en niveles de gris en una mastografía original. Esto ayudará al experto en la notación de bordes de tumores. La notación automática de cúmulos de micro-calcificaciones fue también alentadora, aunque la implementación del método es simple nosotros consideramos que puede ser de utilidad como una guía al radiólogo, quien puede descartar los cúmulos falsamente detectados por el algoritmo.
VII. AGRADECIMIENTOS
Los autores agradecen el apoyo financiero por parte del Consejo Nacional de Ciencia y Tecnología, así como del Instituto de Ciencia y Tecnología del Distrito Federal.
VIII. REFERENCIAS
[1] P. Porter, “Westernizing women´s risk? Breast cancer in lower-income countries”, N. Engl J Med, 358 (258), pp. 213-216, 2008.
[2] B. Sahiner, “Malignant and benign breast masses on 3D US volumetric images: effect of computer-aided diagnosis on radiologist accuracy”, Radiology, 242 (3), pp. 716-724, 2007.
[3] C. M. Chen, Y. H. Chou, K.C. Han, G.S. Hung, C.M. Tiu, H.J. Chiou, S. Y. Chiou, “Breast lesions on sonograms: computer-aided diagnosis with nearly setting-independent features and artificial neural networks”, Radiology, 226, pp. 504-514, 2003.
[4] R. F. Chang, W. J. Wu, W. K. Moon, D. R. Chen, “Improvement in breast tumor discrimination by support vector machines and speckle-amphasis texture analysis”, Ultrasound in Medicine and Biology, 29 (5), pp. 679-686, 2003.
[5] R.W. Prager, R.N. Rohling, A.H. Gee, L. Berman, “Rapid calibration for 3D freehand ultrasound”, Ultrasound in Medicine and Biology, 24 (6), pp.855-869, 1998.
[6] F. Arámbula Cosío, E. Lira Berra, N. Hevia Montiel, C. García Segundo, E. Garduño, M. Alvarado González, R. M. Quispe Siccha, B. Reyes Ramírez, E. Hazan Lasri, “Computer assisted biopsy of breast tumors”, 32nd
Annual International Conference of the IEEE EMBS, Conferences proceedings, pp. 5995-5998, 2010.[7] K. Thangavel, M. Karnan, R. Sivakumar, A. Kaja Mohideen, “Automatic detection of microcalcification in
mammograms – A review”, ICGST – GVIP Journal, 5 (5), pp. 31–61, 2005.[8] H. Kobatake, M. Murakami, H. Takeo, S. Nawano, “Computerized detection of malignant tumors on digital
mammograms”, IEEE Transactions on Information Technology in Biomedicine, pp. 369 – 378, 1999.[9] H. Kobatake, S. Hashimoto, “Convergence index filter for vectors fields”, IEEE Transactions on Image
Processing, 8(8), pp.1029 – 1038, 1999.[10] Martin Ester, Hans-Peter Kriegel, Jörg Sander, Xiaowei Xu, "A density-based algorithm for discovering
clusters in large spatial databases with noise". In Evangelos Simoudis, Jiawei Han, Usama M. Fayyad. Proceedings of the Second International Conference on Knowledge Discovery and Data Mining (KDD-96) . AAAI Press. pp. 226–231, 1996.