ame 5003-lecture-2 modelling of mechanical systems
DESCRIPTION
AME 5003-Lecture-2 Modelling of Mechanical SystemsTRANSCRIPT

1
Mathematical Modelling of Mechanical Systems
Vidhya Ragesh06-02-2014

2
Outline of this Lecture
•Part-I: Laplace Transform
•Part-II: Transfer Function
•Part-III: Translational Mechanical System

Overview
• The transfer function of a process shows the characteristics of its dynamic behavior assuming a linear representation of the process.

4
What is a Transfer Function?
• Given a linear system, then the transfer function, G(s), of the system is the ratio of the transform of the output to the transform of the input.
Examine the diagram
• In this system, we have the following:– The system is linear. – The input is c(t), and the transform of the input is C(s).– The output is y(t), and the transform of the output is Y(s).
• Then, the transfer function is given by: G(s) = Y(s)/C(s)

5
Basic Types of Mechanical Systems
• Translational– Linear Motion
• Rotational– Rotational Motion

6
TRANSLATIONAL MECHANICAL SYSTEMSPart-I

Basic Elements of Translational Mechanical Systems
Translational Spring
i)
Translational Massii)
Translational Damperiii)

Translational Spring
i)
Circuit Symbols
Translational Spring• A translational spring is a mechanical element that
can be deformed by an external force such that the deformation is directly proportional to the force applied to it.
Translational Spring
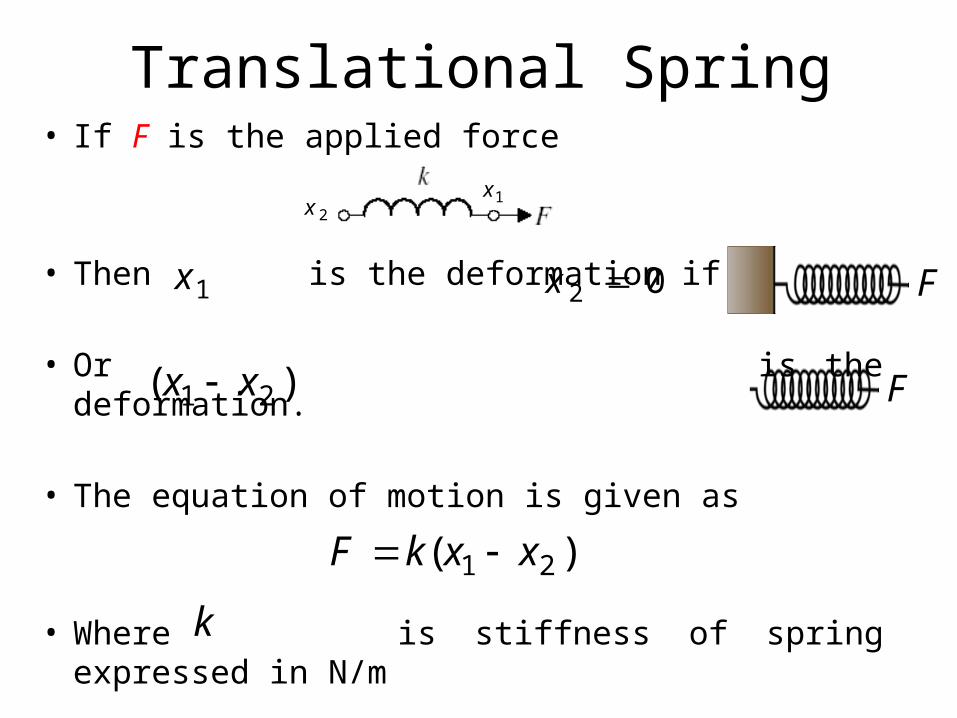
Translational Spring• If F is the applied force
• Then is the deformation if
• Or is the deformation.
• The equation of motion is given as
• Where is stiffness of spring expressed in N/m
2x1x
02 x1x
)( 21 xx
)( 21 xxkF
k
F
F

Translational Mass
Translational Massii)
• Translational Mass is an inertia element.
• A mechanical system without mass does not exist.
• If a force F is applied to a mass and it is displaced to x meters then the relation b/w force and displacements is given by Newton’s law.
M)(tF
)(tx
xMF

Translational Damper
Translational Damperiii)
• When the viscosity or drag is not negligible in a system, we often model them with the damping force.
• All the materials exhibit the property of damping to some extent.
• If damping in the system is not enough then extra elements (e.g. Dashpot) are added to increase damping.
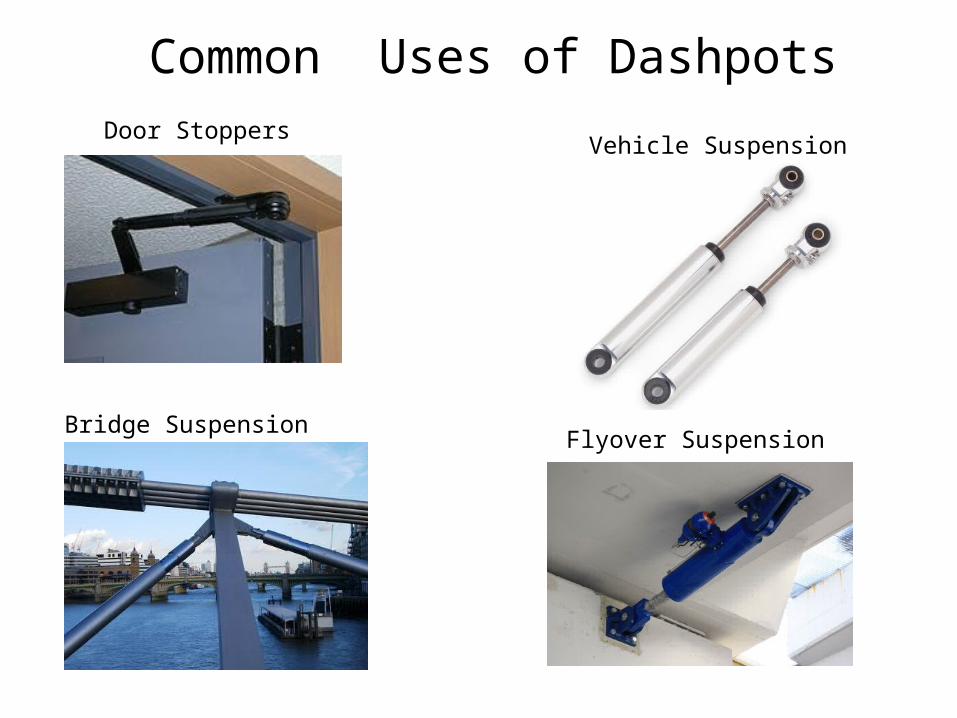
Common Uses of DashpotsDoor Stoppers
Vehicle Suspension
Bridge SuspensionFlyover Suspension

Translational Damper
xCF
• Where C is damping coefficient (N/ms-1).
)( 21 xxCF

14
Modelling a simple Translational System• Example-1: Consider a simple horizontal spring-mass system on a
frictionless surface, as shown in figure below.
or kxxm
0 kxxm

15
Example-2• Consider the following system (friction is negligible)
• Free Body Diagram
MF
kfMf
k
F
xM
• Where and are force applied by the spring and inertial force respectively.
kf Mf

16
Example-2
• Then the differential equation of the system is:
kxxMF
• Taking the Laplace Transform of both sides and ignoring initial conditions we get
MF
kfMf
Mk ffF
)()()( skXsXMssF 2

17
)()()( skXsXMssF 2
• The transfer function of the system is
kMssF
sX
2
1
)()(
• if
12000
1000
Nmk
kgM
2
00102
ssF
sX .)()(
Example-2

18
• The pole-zero map of the system is
2
00102
ssF
sX .)()(
Example-2
-1 -0.5 0 0.5 1-40
-30
-20
-10
0
10
20
30
40Pole-Zero Map
Real Axis
Imagin
ary
Axis

19
Example-3• Consider the following system
• Free Body Diagram
k
F
xM
C
MF
kf
Mf
Cf
CMk fffF

20
Example-3
Differential equation of the system is:
kxxCxMF
Taking the Laplace Transform of both sides and ignoring Initial conditions we get
)()()()( skXsCsXsXMssF 2
kCsMssF
sX
2
1
)()(
21
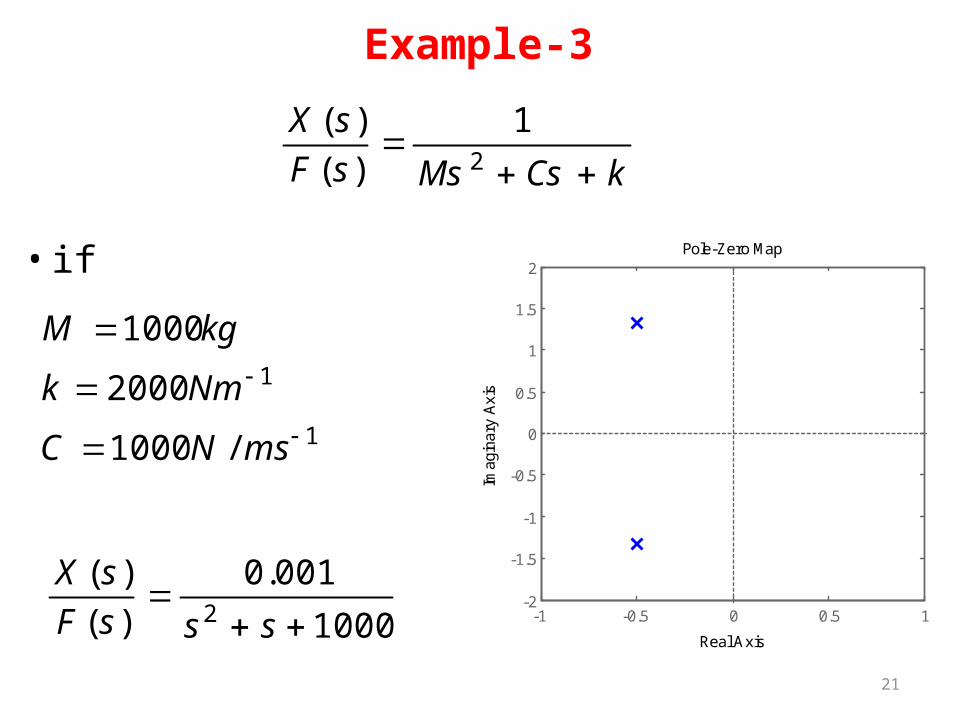
Example-3
kCsMssF
sX
2
1
)()(
• if
1
1
1000
2000
1000
msNC
Nmk
kgM
/
1000
00102
sssF
sX .)()(
-1 -0.5 0 0.5 1-2
-1.5
-1
-0.5
0
0.5
1
1.5
2Pole-Zero Map
Real Axis
Imag
inar
y A
xis

22
Example-4• Consider the following system
• Free Body Diagram (same as example-3)
MF
kf
Mf
Bf
BMk fffF kBsMssF
sX
2
1
)()(
23
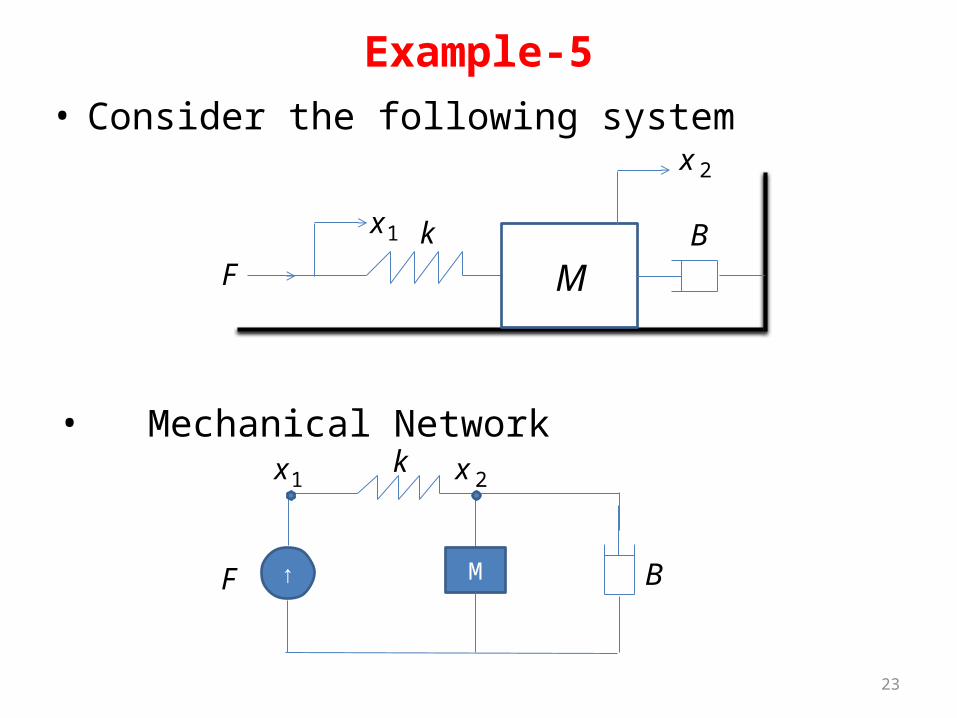
Example-5• Consider the following system
• Mechanical Network
k
F
2x
M1x B
↑ M
k
BF
1x 2x

24
Example-5
• Mechanical Network
↑ M
k
BF
1x 2x
)( 21 xxkF
At node 1x
At node 2x
22120 xBxMxxk )(

Example-6• Find the transfer function X2(s)/F(s) of the following system.
1M 2M
k
B

26
Example-7
k
)(tf
2x
1M4B3B
2M
1x
1B 2B

27
Example-8• Find the transfer function of the mechanical translational
system given in Figure-1.
Free Body Diagram
Figure-1
M
)(tf
kf
Mf
Bf
BMk ffftf )(kBsMssF
sX
2
1
)()(

28
Example-9• Restaurant plate dispenser

29
Example-10• Find the transfer function X2(s)/F(s) of the following system.
Free Body Diagram
M1
1kf
1Mf
Bf
M2
)(tF
1kf
2Mf
Bf2kf
2k
BMkk fffftF 221
)(
BMk fff 11
0
30
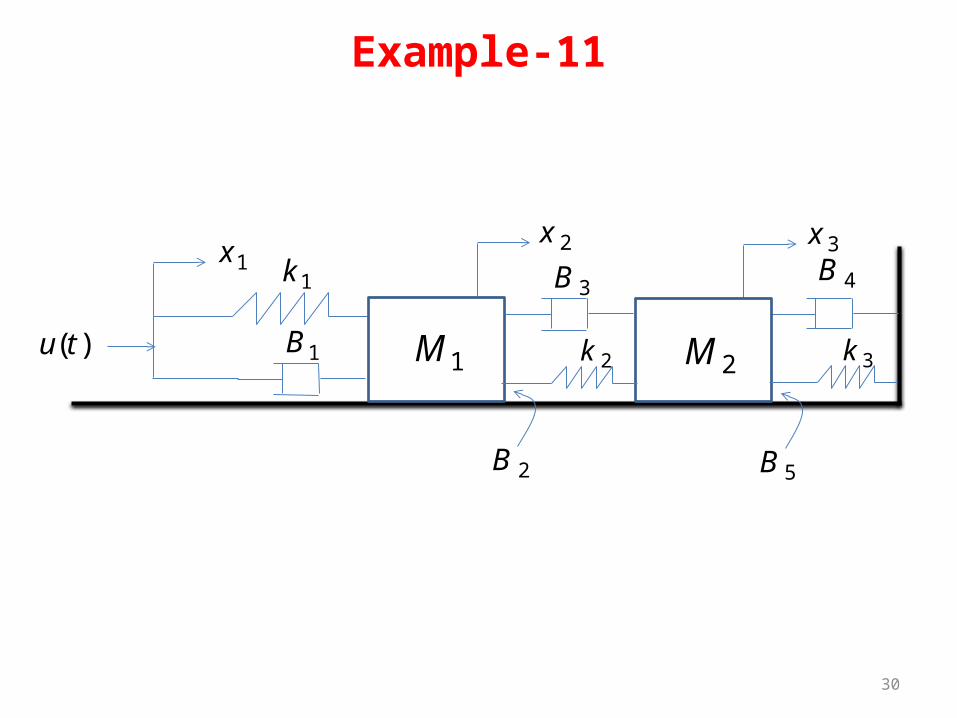
Example-11
1k
)(tu
3x
1M
4B3B
2M
2x
2B 5B
2k 3k
1x
1B

31
Example-12: Automobile Suspension

32
Automobile Suspension

33
Automobile Suspension
).()()( 10 eq ioioo xxkxxbxm
2 eq. iiooo kxxbkxxbxm
Taking Laplace Transform of the equation (2)
)()()()()( skXsbsXskXsbsXsXms iiooo 2
kbsms
kbs
sX
sX
i
o
2)(
)(
34
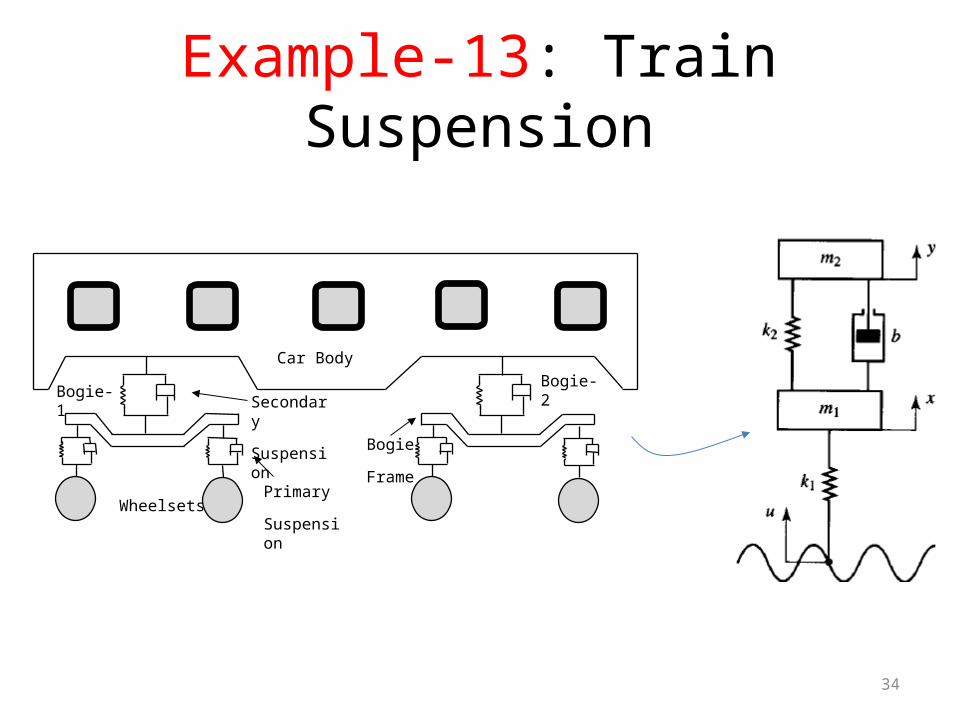
Example-13: Train Suspension
Car BodyBogie-2
Bogie
Frame
Bogie-1
WheelsetsPrimary
Suspension
Secondary
Suspension

35
Example: Train Suspension