a multiobjective approach of differential evolution optimization applied to electromagnetic problems
TRANSCRIPT

IEEE TRANSACTIONS ON MAGNETICS, VOL. 50, NO. 2, FEBRUARY 2014 7015404
A Multiobjective Approach of Differential EvolutionOptimization Applied to Electromagnetic Problems
Gustavo Caravaggi Tenaglia and Luiz Lebensztajn
Laboratório de Eletromagnetismo Aplicado, LMAG-PEA, Escola Politécnica da Universidade de São Paulo,São Paulo 05508-900, Brazil
The differential evolution (DE) algorithm belongs to a class of evolutionary techniques that use the stochastic approach to solveoptimization problems. Storn and Price proposed it in its mono-objective form, and since then it has yielded good results, suchas faster global convergence, when compared with other classical evolutionary algorithms. A multi-objective approach is proposedhere, combining the DE evolutionary mechanism with concepts extracted from the strength Pareto evolutionary algorithms (SPEAs),proposed by Zitzler and Theile. This approach was applied to test functions and electromagnetic problems to demonstrate itsreliability.
Index Terms— Electric machines, optimization.
I. INTRODUCTION
FREQUENTLY, during the electromagnetic device design,the engineer has to use optimization tools to solve prob-
lems with conflicting objectives. The recent literature containsestablished stochastic optimization methods to solve mono [1]and multi-objective [2], [3] problems.
This paper presents an approach to solve multiple objectiveproblems, combining the evolutionary mechanism from differ-ential evolution (DE) [4] and the external Pareto archiving, asproposed in [5]. This method should be seen as a promisingalternative, since it has been shown to be simple and robust.
The current paper presents the theoretical approach of thismethod, demonstrating part of its potential by solving somebenchmark problems test functions [6], the optimal design ofa Brushless dc motor [7] and by solving the multiobjectiveapproach of TEAM 25 problem [8]. Those problems are,respectively, analytical and numerical demonstrating the ver-satility of the proposed method.
II. PROPOSED ALGORITHM
The multiobjective approach of the DE algorithm (MultiDE)was designed to be as simple as the original (mono-objective)version. In fact, the simplicity of the DE evolutionary mech-anism was adapted, being mainly used to create a new popu-lation and to explore the space of variables.
As for the original DE, some parameters must be set:the mutation factor—MF (real number between 0 and 0.5);the crossover rate—CR (real number between 0 and 1); thepopulation size NP. Only the parameter “maximum size of thePareto Front” was introduced.
The strength of a non-dominated solution is calculated asfollows, where di represents the number of elements that thissolution covers:
Si = di
NP + 1. (1)
Manuscript received June 29, 2013; revised September 19, 2013; acceptedOctober 8, 2013. Date of current version February 21, 2014. Correspondingauthor: L. Lebensztajn (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are availableonline at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TMAG.2013.2285980
In contrast, the strength of each dominated element is equalto the summation of the strengths of the elements that coverthis element plus 1. In sequence, the DE is firstly called andthe next population is determined. In each iteration, the currentPareto set is compared with another one, which is stored inan external file [5]. Elements from the previous populationand from the current Pareto set are ranked according to theirstrength, and equal solutions are eliminated.
The MultiDE is established as follows. To the first NPranked elements, two solutions are randomly chosen from theprevious population: xrand1(t), and xrand2(t). The differencebetween those two elements is weighted by MF and addedto the element from the rank. It results in a new mutatedvector (v i (t + 1)), as shown in (2), where i = {1…NP} is theindividual index of population and t is the current generation
vi (t + 1) = xi (t) + MF(xrand1(t)−xrand2(t)
). (2)
To increase diversity, the mutated vector suffers a“crossover” as defined by (3). At this step, vi (t + 1) iscombined with xi , as follows:
ui, j (t + 1) ={
vi, j (t + 1) , if (rand ( j) ≤ CR)xi, j(t), if (rand( j) > CR)
(3)
In (3), rand ( j ) is a real random number between 0 and 1,and is compared with CR for every j th position of vectorof variables. If rand ( j) is lower than CR, vi, j (t + 1) ismaintained, otherwise xi, j (t) will take this position. Thedomination criterion is used between vectors xi(t) and ui(t+1)to select which of them will remain in the population.
During the initialization, the first population is randomlycreated and unfeasible solutions are eliminated. Afterward, theother solutions are ranked according to their strength, creatingthe first Pareto set as proposed in [5].
After that, those new vectors in the current generationare compared with the external Pareto Set; solutions areranked and a selection is made, only the non-dominated onessurviving in the external archive. If the number of elements inthe Pareto set is greater than a prescribed maximum, a clusterreduction should be performed, as proposed in strength Paretoevolutionary algorithm (SPEA).
0018-9464 © 2014 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.

7015404 IEEE TRANSACTIONS ON MAGNETICS, VOL. 50, NO. 2, FEBRUARY 2014
Fig. 1. Scheme of the optimization process.
The process (shown in Fig. 1) keeps running until at leastone of the stop criteria is attained, for example: number ofevaluations, deviation between runs, time processing, and soon. Usually, to obtain more accurate results, the optimizationprocess can be run several times, and then all the differentsolutions may suffer a Pareto reduction, reaching the finalresponse.
The advantage of this method is its simplicity, low numberof control parameters, and computational requirements. Itscode can be easily modified and updated. The use of Paretosets and DE was also proposed in [9] and [10], but both authorsuse SPEA2 and they applied to only to analytical problems.As far as we know, this is the first time that this is applied toan electromagnetic device optimization.
III. PROBLEMS AND THE RESULTS
Since a new optimization algorithm is developed, com-parison against other similar method is useful. To validateMultiDE, it was chosen to compare the “gamultiobj” (refer-enced here as MultiGA: a multiobjective version of GeneticAlgorithms available in MATLAB. Both methods were per-formed with the benchmark problems, the Brushless dc wheelmotor and to the die press model (TEAM 25).
A. Benchmarks Proposed by Deb
Three different problems, Deb1, Deb2, and Deb3, weresolved with those methods (MultiGA and MultiDE). ThePareto front of each problem is, respectively, convex, non-convex, and non-continuous.
These problems are well described in [6] and the mainformulation to any “Deb problem” is represented as follows:
⎧⎪⎪⎨
⎪⎪⎩
min [ f1 (x) , f2 (x)]x ∈ R = {x1, . . . , xm} and 0 ≤ xm ≤ 1f1 (x) = x1f2 (x) = g (x2, . . . , xm) · h ( f1 (x) , g (x2, . . . , xm)) .
(4)
For all the functions, g (x2, . . . , xm) is always the same
g (x2, . . . , x30) = 1 + 9 ·∑30
i=2
xi
29. (5)
Fig. 2. Optimization of Deb1 by MultiGA and MultiDE.
Fig. 3. Optimization of Deb2 by MultiGA and MultiDE.
Fig. 4. Optimization of Deb3 by MultiGA and MultiDE.
Particularities of each “Deb” are represented in (6)–(8),where function h ( f1, g) changes
h ( f1, g)Deb1 = 1 −√
f1/
g (6)
h ( f1, g)Deb2 = 1 − ( f1/g)2 (7)
h ( f1, g)Deb3 = 1 − √f1/g − ( f 1/g) · sin(10π f1). (8)
To solve those problems, the population size was definedas 300 and the process stopped when the number of iterationsreached 3000. The results can be found in Figs. 2–4.
It was observed that a good MF value for this classof problem should be very low, i.e., MF should be lowerthan 0.05.
It is worth mentioning that instead of “Deb’s problems”are high dimensional. For the function Deb1, MultiGA andMultiDE have quite similar performance when solving thiskind of problem. MultiGA presents a better space distribution,but MultiDE has a good coverage with respect to MultiGA.For functions Deb2 and Deb3, MultiGA presents a better space

TENAGLIA AND LEBENSZTAJN: MULTIOBJECTIVE APPROACH OF DE OPTIMIZATION 7015404
TABLE I
PARAMETERS AND CONSTRAINTS
distribution and covers the solutions of MultiDE. For this classof problem, with high number of optimization variables, wecan observe that MultiDE presents a good result, but with alow performance, when comparing with MultiGA.
B. Brushless DC Wheel Motor Problem
This problem is a benchmark proposed in [7] and [11] anda solution of this multiobjective problem is described in [12].All the physical modeling is well described in [7] and [11],and it will thus be omitted here.
The main challenge is to minimize the motor mass andsimultaneously to maximize its efficiency, finding the optimalvalue of five variables: the stator diameter (Ds), the magneticinduction in the air gap (Be), the current density in theconductors (δ), the magnetic induction in the teeth (Bd), andthe magnetic induction in the stator back iron (Bcs).
A feasible solution should respect constraints for the outerdiameter (Dext); the inner diameter (Dint); the current in themagnets (Imax); the temperature of the magnets (Ta); and thedeterminant Det(Ds , δ, Bd , Bs) used for calculating the slotheight must be positive. Those parameters and constraints areshown in Table I.
The optimization setup of this problem was 10 independentruns, with 100 individuals in each population (NP) and amaximum of 100 elements on the Pareto set. The MF wasset as 0.015 and the CR as 0.9. The run stops when it reachesa maximum number of evaluation (2000). The same setup wasused for the next problem.
The final Pareto front is shown in Fig. 5, where the massand 1-efficiency (1-η). The Pareto fronts were obtained byusing MultiDE and MultiGa, and both methods present gooddiversity. Table II shows that the Pareto front from MultiDEcovers the one from MultiGA, although the spacing index fromMultiGA has better value, as shown in Table III. To betterobserve the result of optimization, the optimization variablesof the MultiDE final Pareto front was analyzed with respectivefrequency are shown in Fig. 6.
It is possible to observe a trend of the physical character-istics of this device, which converge to typical values of thiselectrical machine design, for example: most non-dominatedsolutions present high value (the upper value) for the magneticinduction in the teeth (Bd), and there is a typical value for theinduction on the air gap (Be) close to 0.66 T.
Fig. 5. Final Pareto front for the brushless dc wheel motor problem.
TABLE II
COVERAGE METRIC FOR THE BRUSHLESS DC WHEEL MOTOR PROBLEM
TABLE III
SPACING METRIC FOR THE BRUSHLESS DC WHEEL MOTOR PROBLEM
Fig. 6. Frequency of parameters after optimization.
C. Optimization of the Die Press Model (TEAM 25)
The goal of TEAM workshop problem 25 is to optimizethe shape of a die mold which is fully described in [8] andwill hence be briefly described here. The goal is to obtaina radial magnetic induction distribution in a specified path.Four parameters (R1, L2, L3, and L4) could be changedin a specified range. The coils are fed to the dc, and thereare two ampere-turn conditions. Only the small ampere-turnwill be analyzed. Therefore, the magnetic induction must beequal 180 to 0.35 T along the specified line and shouldbe radial.
7015404 IEEE TRANSACTIONS ON MAGNETICS, VOL. 50, NO. 2, FEBRUARY 2014
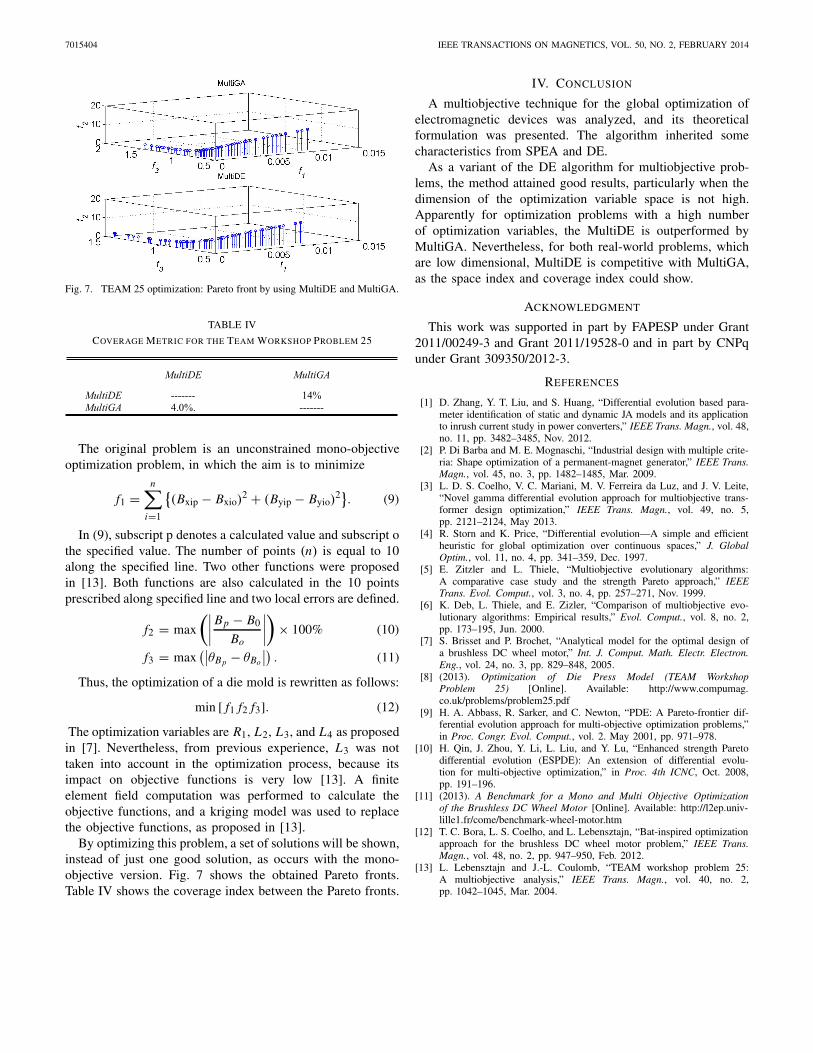
Fig. 7. TEAM 25 optimization: Pareto front by using MultiDE and MultiGA.
TABLE IV
COVERAGE METRIC FOR THE TEAM WORKSHOP PROBLEM 25
The original problem is an unconstrained mono-objectiveoptimization problem, in which the aim is to minimize
f1 =n∑
i=1
{(Bxip − Bxio)
2 + (Byip − Byio)2}. (9)
In (9), subscript p denotes a calculated value and subscript othe specified value. The number of points (n) is equal to 10along the specified line. Two other functions were proposedin [13]. Both functions are also calculated in the 10 pointsprescribed along specified line and two local errors are defined.
f2 = max
(∣∣∣∣
Bp − B0
Bo
∣∣∣∣
)× 100% (10)
f3 = max(∣∣θBp − θBo
∣∣) . (11)
Thus, the optimization of a die mold is rewritten as follows:
min [ f1 f2 f3]. (12)
The optimization variables are R1, L2, L3, and L4 as proposedin [7]. Nevertheless, from previous experience, L3 was nottaken into account in the optimization process, because itsimpact on objective functions is very low [13]. A finiteelement field computation was performed to calculate theobjective functions, and a kriging model was used to replacethe objective functions, as proposed in [13].
By optimizing this problem, a set of solutions will be shown,instead of just one good solution, as occurs with the mono-objective version. Fig. 7 shows the obtained Pareto fronts.Table IV shows the coverage index between the Pareto fronts.
IV. CONCLUSION
A multiobjective technique for the global optimization ofelectromagnetic devices was analyzed, and its theoreticalformulation was presented. The algorithm inherited somecharacteristics from SPEA and DE.
As a variant of the DE algorithm for multiobjective prob-lems, the method attained good results, particularly when thedimension of the optimization variable space is not high.Apparently for optimization problems with a high numberof optimization variables, the MultiDE is outperformed byMultiGA. Nevertheless, for both real-world problems, whichare low dimensional, MultiDE is competitive with MultiGA,as the space index and coverage index could show.
ACKNOWLEDGMENT
This work was supported in part by FAPESP under Grant2011/00249-3 and Grant 2011/19528-0 and in part by CNPqunder Grant 309350/2012-3.
REFERENCES
[1] D. Zhang, Y. T. Liu, and S. Huang, “Differential evolution based para-meter identification of static and dynamic JA models and its applicationto inrush current study in power converters,” IEEE Trans. Magn., vol. 48,no. 11, pp. 3482–3485, Nov. 2012.
[2] P. Di Barba and M. E. Mognaschi, “Industrial design with multiple crite-ria: Shape optimization of a permanent-magnet generator,” IEEE Trans.Magn., vol. 45, no. 3, pp. 1482–1485, Mar. 2009.
[3] L. D. S. Coelho, V. C. Mariani, M. V. Ferreira da Luz, and J. V. Leite,“Novel gamma differential evolution approach for multiobjective trans-former design optimization,” IEEE Trans. Magn., vol. 49, no. 5,pp. 2121–2124, May 2013.
[4] R. Storn and K. Price, “Differential evolution—A simple and efficientheuristic for global optimization over continuous spaces,” J. GlobalOptim., vol. 11, no. 4, pp. 341–359, Dec. 1997.
[5] E. Zitzler and L. Thiele, “Multiobjective evolutionary algorithms:A comparative case study and the strength Pareto approach,” IEEETrans. Evol. Comput., vol. 3, no. 4, pp. 257–271, Nov. 1999.
[6] K. Deb, L. Thiele, and E. Zizler, “Comparison of multiobjective evo-lutionary algorithms: Empirical results,” Evol. Comput., vol. 8, no. 2,pp. 173–195, Jun. 2000.
[7] S. Brisset and P. Brochet, “Analytical model for the optimal design ofa brushless DC wheel motor,” Int. J. Comput. Math. Electr. Electron.Eng., vol. 24, no. 3, pp. 829–848, 2005.
[8] (2013). Optimization of Die Press Model (TEAM WorkshopProblem 25) [Online]. Available: http://www.compumag.co.uk/problems/problem25.pdf
[9] H. A. Abbass, R. Sarker, and C. Newton, “PDE: A Pareto-frontier dif-ferential evolution approach for multi-objective optimization problems,”in Proc. Congr. Evol. Comput., vol. 2. May 2001, pp. 971–978.
[10] H. Qin, J. Zhou, Y. Li, L. Liu, and Y. Lu, “Enhanced strength Paretodifferential evolution (ESPDE): An extension of differential evolu-tion for multi-objective optimization,” in Proc. 4th ICNC, Oct. 2008,pp. 191–196.
[11] (2013). A Benchmark for a Mono and Multi Objective Optimizationof the Brushless DC Wheel Motor [Online]. Available: http://l2ep.univ-lille1.fr/come/benchmark-wheel-motor.htm
[12] T. C. Bora, L. S. Coelho, and L. Lebensztajn, “Bat-inspired optimizationapproach for the brushless DC wheel motor problem,” IEEE Trans.Magn., vol. 48, no. 2, pp. 947–950, Feb. 2012.
[13] L. Lebensztajn and J.-L. Coulomb, “TEAM workshop problem 25:A multiobjective analysis,” IEEE Trans. Magn., vol. 40, no. 2,pp. 1042–1045, Mar. 2004.