15.cutter location data optimization in 5 axis surface machining
TRANSCRIPT

7/28/2019 15.Cutter Location Data Optimization in 5 Axis Surface Machining
http://slidepdf.com/reader/full/15cutter-location-data-optimization-in-5-axis-surface-machining 1/10
C u t t e r - l o c a t i o n d a t ao p t i m i z a t i o nm a c h i n i n g
in 5 -ax is sur face
B K C h o i , J W P a r k a n d C S J u n *
A m etho d of generat ing 'opt imal ' cut ter- locat ion da ta fo r5-axis NC contour mi l l ing f rom given cut ter-contact data
is prese nted in the paper. The cu t ter- locat ion data-
op t imi za ti on prob l em i s f o rm u la t ed as a 2D cons t rained
min imi za t i on prob l em. The c u t t e r o r i e n t a t i o n a n g l e s
consisting o f the t i l t ang le ~ a n d y a w a n g l e / / a r e used as
decision variables . A n analyt ic expression fo r appro ximate
cusp heights is derived as a func t ion of ~,~ ( for a
given path in terval ) to be used as a measure of opt imal i ty.
The prop osed opt imizat ion sc hem e has been successful ly
appl ied in the 5-ax is ac e mi l l ing o f large marine propel lers .
5-axis N C machin ing, cu t ter- loca t ion da ta generat ion , cusp heigh ts
5 - a x i s c o n t o u r m i l l i n g i s w i d e l y u s e d i n t h e m a c h i n i n g
of tu rb ine b lades 1 , im pe l le rs 2 and m a r ine p rope l l e rs 3 .
T h e m a c h i n i n g o f l a r g e s c u l p t u r e d s u r f a ce s o n 5 - a x i s N C
m a c h i n e s i s u s u a l l y b a s e d o n f a c e m i l l i n g4 , whi le end
m i l l s a re used fo r ' sm a l le r ' s cu lp tu red sur faces ~ . In 5 -ax is
c o n t o u r m i l l i n g , t h e m i l l i n g c u t t e r i s t i l t e d f o r w a r d s i n
t h e d i r e c t i o n o f th e f e e d . T h i s t e c h n i q u e i s k n o w n a s S t u r z
m i l l ing 1
A s s h o w n i n F i g u r e 1 , 5 - ax i s c o n t o u r m i l l in g i n g e n e r a l
r e q u i r es f o u r s t a g e s o f i n f o r m a t i o n p r o c e s s i n g :
• Cut ter contact path s a r e g e n e r a t e d f r o m t h e i n p u ts u r f ac e d a t a .
• Cut ter- locat ion data ( C L d a t a ) a r e o b t a i n e d f r o m t h e
c u t t e r - c o n t a c t d a t a , a n d t h e n t h e C L d a t a a r e
c o n v e r t e d t o jo in t values o f t h e 5 - a x is m a c h i n e .
• Bounded-deviat ion jo int p ath planning 5 i s p e r f o r m e d ,
i f neces sa ry , to en sure s t ra ig h t - l ine t ra jec to r ie s .
• F i n a l l y , t h e r e s u l t i n g j o i n t v a l u e s a r e pos tprocessed to
o b t a i n N C - c o d e s .
IE Departmen t, Korea Advanced Institute of Science & Technology,373-1, Gusun g-dong , Yusong-gu, Taejo n, Korea*Gyeongsang National U niversity,Chinju, Korea
Paper received: 8 Ju ne 1992. Revised: 30 Octob er 1992
A few 5-ax i s m ach in in g sof tw are sys tem s 1-3 have been
r e p o r t e d , a n d m o s t o f t h e c o m m e r c i a l C A D /C A M s y s t e m s
s u p p o r t 5 - ax i s m a c h i n i n g c a p a b i l it i e s , b u t v e r y l i tt l e h a s
b e e n p u b l i s h e d c o n c e r n i n g ' m a c h i n i n g e f f ic i e n cy ' . P e r -
h a p s t h e t w o m a j o r i s s u e s ( i g n o r i n g t h e i s s u e o f
o p t i m i z i n g c u t t i n g c o n d i t i o n s ) i n 5 - ax i s m i ll i n g a r e :
• h o w t o g e n e r a t e c u t t e r - c o n t a c t p a t h s ( o r t o o l
t r a j e c t o r i e s ) t o g i v e a m i n i m u m m a c h i n i n g t i m e ( o r
a m a x i m u m w i d t h o f a m a c h i n e d s t ri p ) ,
• h o w t o g e n e r a t e C L d a t a f r o m th e g iv e n c u t t e r - c o n t a c t
p a t h s t o g i v e m i n i m u m c u s p h e i g h t s .
The f i r s t i s sue i s addres sed in Refe rence 4 , in which ' the
p o s s i b i li t y o f r e d u c i n g m a c h i n i n g t i m e b y f i t ti n g t h e t o o lt ra jec to ry to the sur face shape ' i s exp lored . The s econd
is sue is the sub jec t o f th i s pape r .
T E R M I N O L O G Y A N D O B J E C T IV EF U N C T I O N
I n t h i s s e c t io n , s o m e t e r m i n o l o g i e s u s e d i n t h e p a p e r a r e
i n t r o d u c e d , a n d t h e g o a l o f C L - d a t a o p t i m i z a t i o n is
i n f o r m a l l y s t at e d . T h e s u r f ac e o f t h e r a w s t o c k t o b e
m a c h i n e d i s c a l l e d t h e raw-s tock sur face , a n d t h e f i n a l
s m o o t h s u r f a c e t o b e p r o d u c e d i s c a l le d t h e par t surface.
A m a t h e m a t i c a l d e s c r i p t i o n o f t h e p a r t s u r f ac e i s c a l le dth e surface data r ( u , v ) .
A s s h o w n i n F i g u r e 2 , t w o s t a g e s o f m e t a l r e m o v a l a r e
u s u a l l y r e q u i r e d t o p r o d u c e a s m o o t h s c u l p t u r e d s u r f a ce .
The raw s to ck i s f i r s t m a chin ed aw ay by a s e r i e s o f m i l l ing
o p e r a t i o n s t o o b t a i n a mach ined sur face , a n d t h e n t h e
uncu t vo lum es ( i . e . the cusps l e f t by the m i l l ing cu t t e rs )
a r e r e m o v e d b y g r i n d i n g o p e ra t i o n s t o o b t a i n t h e s m o o t h
p a r t s u r f a c e . A p o i n t o n t h e p a r t s u r f a c e a t w h i c h t h e
c u t t e r i s p l a n n e d t o m a k e c o n t a c t i s c a l l e d t h e
cut ter-contact point e . A ser ie s o f cu t t e r -co n tac t po in t s
m a y f o r m a cut ter-contact path . T h e d i s t a n c e b e t w e e n a
p a i r o f a d j a c e n t c u t t e r - c o n t a c t p a t h s i s c a l le d t h e pa th
interval d.
v o lu m e 2 5 n u m b e r 6 ju n e 1 9 9 3 0 0 1 0 -4 4 8 5 /9 3 /0 6 0 3 7 7 -1 0 @ 1 9 9 3 Bu t te rwo r th -He in e ma n n L td 3 7 7

7/28/2019 15.Cutter Location Data Optimization in 5 Axis Surface Machining
http://slidepdf.com/reader/full/15cutter-location-data-optimization-in-5-axis-surface-machining 2/10
B K Cho i , J W Park and C S Jun
I
Cu tter Co n tact Pa th G en era t i on
C L - D a t a O p t i m i z a t i o n
• C C - D a t a t o C L - D a t a C o n v e r s i o n• C L - D a t a t o J o i n t V a l u e C o n v e r s i o n
B o u n d e d D e v i a t i o n J o i n t P a t h P l a n n i n g
I
I P o s t - P r o c e s s i n g [
F i g u r e 1. I n f o r m a t i o n p r o c e s s i n g .f o r 5 - a x i s m a c h i n i n g
T h e f a c e - m i l l i n g c u t t e r s h o w n i n F i g u r e 3 is m a k i n g a
p o i n t c o n t a c t w i t h t h e p a r t s u r f a c e r ( u , t ~ ) a t a
c u t t e r - c o n t a c t p o i n t e . T h e c u t t e r h a s t w o d e g r e e s o f
f r e e d o m , w h i c h h a v e t o b e f i x e d t o d e t e r m i n e a u n i q u e
c u t t e r l o c a t i o n . I t i s c o n v e n i e n t t o d e f i n e a n o r t h o g o n a l
c o o r d i n a t e f r a m e a t c . T h e u n i t v e c t o r i n t h e d i r e c t i o n
o f t h e c u t t e r - f e e d m o t i o n i s c a ll e d a c u t t e r - f e e d v e c t o r f ,
a n d a u n i t t a n g e n t v e c t o r p e r p e n d i c u l a r t o f i s c a l l e d as u r f a c e - t a n g e n t v e c t o r t . T h e n , a u n i t n o r m a l v e c t o r n is
d e f in ed a s n = f x t . T h u s , t h e t h r ee u n i t v ec to r s f , t , n
a n d t h e p o s i t i o n c d e f in e a n o r t h o g o n a l c o o r d i n a t e f r a m e
H = ( f , t , n , e ) .
T h e c u t t e r l o c a t i o n i n F i g u r e 3 i s c a l l e d a z e r o l o c a t i o n
i n w h i c h t h e b o t t o m o f t h e f a c e - m i l l i n g c u t t e r i s s e a t e d
o n t h e f t p l a n e m a k i n g a p o i n t c o n t a c t w i t h t h e t n
p l a n e a t e . N o w , t h e s h a n k o f t h e c u t t e r i s ti l te d t o t h e
d i r e c t i o n o f f ( i. e . r o t a t e d a r o u n d t ) w h i l e m a i n t a i n i n g
t h e p o i n t c o n t a c t a t e , a s s h o w n i n F i g u r e 4 a . D e p i c t e d
i n F i g u r e 4 a r e t h r e e o r t h o g o n a l v i e w s o f t h e c u t t e r ( i. e .
t h e f a c e o f th e c u t t e r v i e w e d f r o m n a n d f , a n d t h e s i d e
o f t h e c u t t e r v i e w e d f r o m t ) . T h e r o t a t i o n a n g l e s h o w n
i n F i g u r e 4 a i s k n o w n a s t h e S t u r z a n g l e I , b u t w e c a l l it
t h e t i l t a n g l e ~ .
I f t h e c u t t e r i n a z e r o l o c a t i o n i s r o t a t e d a r o u n d t h e
n o r m a l v e c t o r n , w h i l e s t i l l m a i n t a i n i n g t h e p o i n t c o n t a c t
a t e , t h e r e s u l t i n g C u t t e r l o c a t i o n b e c o m e s t h e o n e s h o w n
i n F i g u r e 4 b . T h i s s e c o n d r o t a t i o n a n g l e i s c a l l e d t h e y a w
a n g l e [ L T h e s e t w o a n g l e s c o m p l e t e l y d e f i n e t h e
o r i e n t a t i o n o f t h e f a c e - m i l l i n g c u t te r , a n d s o t h e y
c o n s t i t u t e t h e c u t t e r o r i e n t a t i o n 0 = (~ , [ t ) . F i g u r e 4 c
s h o w s t h e t h r e e o r t h o g o n a l v i e w s o f t h e c u t t e r w i t h b o t h
R a w s t o c k s u r f a c e
M a c h i n e d s u r f a c e
a b
F i g u r e 2 . M e t a l r e m o v a l i n s c u l p t u r e d - s u r f a c e m a c h i n i n g ; ( a ) m i l l i n g , ( b ) g r i n d i n g
f
n
~ i : i ~ i i i i i i l ] i ! i i i i ! ] ! ! ! i l i l ] i ! ] ~ ] ! i ] ! ! ! ! i ! ] ] ~
F i g u r e 3. C u t t e r l o c a t io n a n d c o o r d i n a t e f r a m e ( f , t , n , c )
f
l ,378 com pute r -a ide d des ign

7/28/2019 15.Cutter Location Data Optimization in 5 Axis Surface Machining
http://slidepdf.com/reader/full/15cutter-location-data-optimization-in-5-axis-surface-machining 3/10
Cutter- loca t ion da ta opt imizat ion in 5-ax is surface mach in ing
t
t
b
n I oi i i i i ~ i i i i i i i i i i i i i i ~ i i i i i i i i i i i i l _ .
t
f
C d
c t
F i g u r e 4. Cu tter -or ien tati on an gles an d o rth og on al view s; ( a ) ct > O, f l = O, ( b ) ~ = O, f l > O, ( c ) ct > O, f l > O, ( d )
e l li pse w i t h 2D coo rd i na t e f ra me
t h e t i l t a n d y a w a n g l e s ~ , f l b e i n g p o s i t i v e ( f l c a n b e
n e g a t i v e ) . I n t h is g e n e r a l c u t t e r l o c a t i o n , th e b o t t o m f a ce
o f t h e c u t t e r a p p e a r s a s a n e l l ip s e in e a c h o f th e
o r t h o g o n a l v i e w s .
T h e e l l ip t i c v i e w o f F i g u r e 4 c p r o j e c t e d o n t h e t - n
p l a n e i s s h o w n a g a i n i n F i g u r e 4 d i n w h i c h a 2 D
c o o r d i n a t e f r a m e i s d e f i n e d su c h t h a t t h e c e n t e r p o i n t o f
t h e e l li p s e b e c o m e s t h e o r i g i n , a n d t h e v e c t o r s t a n d n ,
b e c o m e t h e x a x i s a n d y a x i s, r e s p e c t iv e l y . T h e a n g l e
b e t w e e n t h e m a j o r a x i s o f th e e l l ip s e a n d t h e x a x i s is
th e e l l ipse ro t a t i on ang l e O . T h e m i n o r r a d i u s o f t h e e l li p s e
i s d e n o t e d b y a . N o t i c e t h a t t h e m a j o r r a d i u s o f t h e e l li p s e
i s e q u a l t o t h e c u t t e r r a d i u s R .
T h e l o c a t i o n o f a c u t t e r i s c o m p l e t e l y s p e c i fi e d b y t h e
cu t t e r - cen t er pos i t i on p a n d t h e cu t t e r -ax i s vec t or u . T h e
t up l e L = ( p , u ) i s ca l l ed t he C L d a t a . T h e i n f o r m a t i o n
a t a c u t t e r - c o n t a c t p o i n t u s e d i n o b t a i n i n g C L d a t a is
c a l l e d t h e cu t t e r - con t ac t da t a , o r C C d a t a 6 . I n 3 - a x is N C
m a c h i n i n g , a c u t t e r -c o n t a c t p o i n t c a n d a s u r f a c e n o r m a l
vec t or n c o n s t i t u t e C C d a t a , b e c a u s e t h e t u p l e ( e , n ) g i v e s
u n i q u e C L d a t a f o r a g i v e n c u t t e r t y p e . H o w e v e r , i n
5 - a x i s m a c h i n i n g , t h e l o c a l c o o r d i n a t e f r a m e a t t h e
c u t t e r - c o n t a c t p o i n t is tr e a t e d a s C C d a t a . N a m e l y , t h e
t u p l e ( c , f , t , n ) b e c o m e s C C d a t a f o r 5 - a x i s m a c h i n in g .W i t h r e f e r e n c e to F i g u r e 2 , f o r a g i v e n s e t o f C C d a ta ,
t h e g o a l o f C L - d a t a o p t i m i z a t i o n i s t o p r o d u c e a n
' o p t i m a l ' machi ned sur f ace t h a t c a n b e c o n v e r t e d t o t h e
f i na l par t sur f ace a t a ' m i n i m u m ' g r i n d i n g c o s t .
C U T T E R O R I E N T A T I O N A N D C L D A T A
T h e C L d a t a L = ( p , u ) f o r g i ven C C d a t a C = (c , f , t , n)
b e c o m e s a f u n c t i o n o f th e cut ter or ienta t ion 0 = (~ , f l ) .
F o r a g i v e n c u t t e r o r i e n t a t i o n 0 = ( ~ , f l ) , i t c a n b e s h o w n
t h a t t h e c u t t e r - a x i s v e c t o r u is e x p r e s s e d a s a l i n e a r
c o m b i n a t i o n o f t h e c o o r d i n a t e - a x i s v e c t o r s f , t , n :
u = co s~ n + s i n ~ ( c os f l f + s i n f i t ) ( 1 )W h e n t h e c u t t e r - a x i s v e c t o r u i s n o t p a r a l l e l t o t h e n o r m a l
v e c t o r n , t h e cu t t e r pos i t i on p i s g i ven by
p = c + R ( u x n x u ) / l u x n l ( 2a )
w h e r e R i s t h e r a d i u s o f th e c u t t e r . I f u a n d n a r e p a r a l l e l,
t h e c u t t e r p o s i t i o n m a y b e s e t t o
p = e - R f ( 2 b )
C U S P H E I G H T S I N 5 - A X I S F A C EM I L L I N G
W i t h o u t l o s s o f g e n e r a l i t y , w e c a n s e t t h e r a d i u s o f t h ec u t t e r t o 1 (i .e . R = 1 ) . T h i s n o r m a l i z a t i o n s i m p l i fi e s o u r
d i s cu s s io n s o m e w h a t . N o t e t h a t t h e m a j o r r a d i u s o f th e
vo lume 25 num ber 6 june 1993 379

7/28/2019 15.Cutter Location Data Optimization in 5 Axis Surface Machining
http://slidepdf.com/reader/full/15cutter-location-data-optimization-in-5-axis-surface-machining 4/10
B K Choi, J W Park and C S Jun
n o r m a l i z e d e l l i ps e ( o f F i g u r e 4 d ) i s a l w a y s 1 . T h e
e q u a t i o n o f t h e n o r m a l i z e d e l l ip s e a t a g i v e n c u t t e r
o r i e n t a t i o n ( e t , f l ) i s compl e t e l y spec i f i ed by i t s m i n o r
r a d i u s a a n d t h e r o t a t i o n a n g l e O . A n e l e m e n t a r y a l g e b r a i c
m a n i p u l a t i o n g i v e s t h e f o l l o w i n g ( o b s e r v e i n F i g u r e 4 d
t h a t t h e C C p o i n t e i s o n t h e e l l i p s e , a n d t h e t a n g e n t o f
the e l l ipse a t e i s t ) :
a = s i n ~ c o s 3(3 )
0 = a t a n ( - t an ~ s in / 3 )
wher e a i s t he m i n o r r a d i u s a n d 0 i s t h e r o t a t i o n a n g l e
o f th e n o r m a l i z e d e l li p se .
A c u s p i s a n u n c u t v o l u m e l e f t i n - b e t w e e n a p a i r o f
a d j a c e n t c u t t e r p a t h s . M o r e e x a c t l y , t h e u n c u t v o l u m e is
o b t a i n e d b y s u b t r a c t in g t h e p a r t s u r f a c e r ( u , v ) f r o m t h e
m a c h i n e d s u r fa c e g e n e r a t e d b y t h e c o n t o u r m i l li n g. T h e
h e i g h t o f a c u s p is d e f i n e d as a l o c a l m a x i m u m o f t h e
t h i c k n e s s o f t h e u n c u t v o l u m e . T h u s , c u s p h e i g h t s a r e
d e p e n d e n t o n t h e l o c al g e o m e t r y o f th e p a r t s u r fa c e , a n d
a ls o o n t h e m a g n i t u d e o f t h e p a t h i n te r v a l d . C u s p h e i g h ts
f o r b a l l e n d m i l l in g a r e e a s i l y d e t e r m i n e d 6 - 1 °, b u t e x a c t
c u s p h e i g h t s f o r 5 - a x i s f a c e m i l l in g c a n o n l y b e c o m p u t e d
f r o m a n e x t e n s i v e c u t t i n g s i m u l a t i o n 7 a n d s u r f a c e
e v a l u a t i o n , w h i c h i s a v e r y t i m e - c o n s u m i n g p r o c e s s .
T h u s , w e p ro p o s e a m e t h o d o f c o m p u t i n g a p p r o x i m a t e
c u s p h e i g h t s f o r 5 - a x i s m a c h i n i n g .
A s s u m i n g t h a t t h e p a r t s u r f a c e r ( u , v ) is s m o o t h , i t is
a p p r o x i m a t e d b y i t s t a n g e n t p l a n e a t t he c u t t e r - c o n t a c t
p o i n t e . F u r t h e r , f o r g i v e n v a lu e s o f t h e c u t t e r o r i e n t a t i o n
( ~ , 3 ) a n d t h e p a t h i n t e r v a l d , t h e c u s p h e i g h t i s
a p p r o x i m a t e d f r o m t h e c o n s t r u c t i o n s h o w n i n F i g u r e 5 .
T h e i d e n t i c a l e l li p s es ( o f F i g u r e 4 d ) a d i s t a n c e d a p a r td e f i n e a c u s p a s s h o w n i n F i g u r e 5 ( t h e t i n t e d a r e a ) . T h e
a p p r o x i m a t e e r r o r i n c r ea s e s a s th e c u r v a t u r e o f t h e p a r t
s u r f a c e a c r o s s t h e c u t t e r - c o n t a c t p a t h s i n c r e a s e s . I t w o u l d
b e i n t e r e s t i n g t o e x t e n d t h e c u s p - h e i g h t c o n s t r u c t i o n t o
a c c o m m o d a t e t h e e f fe c t o f th e c u r v a t u r e . T h i s e x t e n s i o n
w il l r e d u c e t h e a p p r o x i m a t i o n e r r o r , b u t m a y h a v e l it tl e
e f fe c t o n t h e C L - d a t a o p t i m i z a t i o n p r o b l e m .
I n F i g u r e 5 a , t h e t w o ' l o w e r - h a l f ' e l l i p s e s ( s h o w n b y
t h e s o l i d l i n e s ) y i e l d a n i n t e r s e c t i o n p o i n t , w h i c h m e a n s
t h a t t h e c u s p i s f o r m e d b y t h e f a c e o f th e c u t t e r a l o n e .
W h e n t h e p a t h i n t e r v a l d e x c e e d s a c e r t a i n v a l u e , t h e
c u s p i s f o r m e d b y t h e f a c e a s w e ll a s t h e s i d e o f t h e c u t t e r ,
a s i n t h e c a s e s h o w n i n F i g u r e 5 b . T h e c r i t i c a l v a l u e d c
o f t h e p a t h i n t e r v a l s e p a r a t i n g t h e s e t w o c a s e s is f o u n d
t o b e ( s e e th e A p p e n d i x )
d c = ( 2 / c o s 0 ) / ( l + ( t a n 0 / a ) 2 1 14)
w h e r e 0 a n d a a r e a s g i v e n in E q u a t i o n 3 . F u r t h e r , i f d
e x c e e d s 2 / c o s 0 , t h e c u s p h e i g h t i s u n d e f i n e d ( t h e c u s p
h e i g h t i n th i s c a se b e c o m e s t h e d i s t a n c e b e t w e e n t h e p a r t
s u r f a c e a n d t h e r a w - s t o c k s u r f a c e ) . A s s h o w n i n t h e
A p p e n d i x , t h e c u s p h e i g h t H s h o w n i n F i g u r e 5 i s g i v e n b y
H ( ~ , f l l d ) = t s i n ~ - x s i n O + y c o s O O < d < ~ d c
~ s i n 7 sin O + ( n - a ( 2m - m2 ) 1,'2)
d ~ < d < 2 / c o s O ( 5 )
wh er e 0 < ~ < 9 0 , - 9 0 < f l < 90 , d c i s t he c r i t i ca l va l ue
o f d g iv e n b y E q u a t i o n 4 , x = ( m + ( n 2 ( 4 - m 2 - n 2 ) /
(m 2 + n 2 ) ) 1 / 2 ) / 2 , y = - a ( 1 - - X2) 1 /2 , m = dc os 0 , n =
d sin O / a , a n d a , 0 a r e a s g i v e n b y E q u a t i o n 3 . W h e n t h e
y a w a n g l e i s 0 , t h e a b o v e e q u a t i o n r e d u c e s t o t h e
c u s p - h e i g h t f o r m u l a p r e s e n t e d i n R e f e r e n c e 1 0 , n a m e l y
H ( e , 0 1 d ) = s i n 2 ( 1 - ( 1 - ( d / 2 ) 2 ) 1/2 )
F o r a g i v e n p a t h i n t e r v a l d, th e c u s p - h e i g h t e q u a t i o n o f
E q u a t i o n 5 is a s m o o t h n o n n e g a t i v e f u n c t i o n d e f i n e d
o v e r t h e e n t i r e r e g i o n o f t h e c u t t e r o r i e n t a t i o n s p a c e ,
0 < ~ < 90 a n d - 9 0 < / 3 < 9 0 . It c a n b e s h o w n t h a t
E q u a t i o n 5 is a n e v e n f u n c t i o n o f ft. N a m e l y , w e h a v e
H ( ~ , f l l d ) = H ( ~ , - f l l d ) . I n p r a c t i c e , t h e r a n g e o f th e
t il t a n g l e ~ is l im i t e d f u r t h e r ( t o p e r h a p s a t m o s t 4 5 ° )
w h e n a f a c e - m i l li n g c u t t e r is u s e d . I n t h e c a s e o f
m a r i n e - p r o p e l l e r m a c h i n i n g 3 , f o r e x a m p l e , ~ e [ 2 , 1 5 ] .
C o n t o u r m a p s o f t h e c u s p - h e i g h t f u n c t i o n f o r d = 0 . 1 , 0 . 5 ,
a n d 1 .0 a r e s h o w n i n F i g u r e 6 o v e r th e r a n g e o f ~ e [ 0 , 4 5 ]
a n d f i e [ 0 , 8 0 ] .
I n a l l t h e c o n t o u r m a p s , t h e c u s p h e i g h t a t t h e
b o t to m - l e f t c o r n e r is z e r o, i.e . H ( 0 , 0 1 d ) = 0 . T h e
m a x i m u m v a l u e s o f t h e c u s p h e i g h ts a r e a t t h e t o p - r i g h t
c o r n e r s :
H ( 4 5 , 80 ] 0.1 ) = 0 .0237
H ( 4 5 , 8 0 [ 0 . 5 ) = 0 . 1 89 0
H ( 4 5 , 8 0 1 1 . 0 ) = 0 . 4 2 1 8
A c o n t o u r l in e c o r r e s p o n d s t o a c u s p h e i g h t o f a b o u t
0 .0012 f o r d = 0 .1 , 0 .0095 f o r d = 0 .5 , and 0 .0211 f o r
d = 1 .0 . O b s e r v e i n F i g u r e 6 t h a t t h e c u s p h e i g h t s a r e
i n c r e a s i n g f u n c t i o n s o f ~ fo r a f i x ed v a l u e o f 3 ( a n d o f 3
f o r a f ix e d v a l u e o f ~ ) in t h e ' p r a c t i c a l ' r a n g e o f th e c u t t e r
o r i e n t a t i o n .
: : i ! : ":i (
c
Figure 5. C o n s t r u c t i o n o f c u s p - h e i g h t a p p r o x i m a t i o n
: : : P "
' k c c '
b
380 computer-aided design
7/28/2019 15.Cutter Location Data Optimization in 5 Axis Surface Machining
http://slidepdf.com/reader/full/15cutter-location-data-optimization-in-5-axis-surface-machining 5/10
Cut te r - loca t ion da ta op t im iza t ion in 5 -ax is su r face mach in ing
a b c
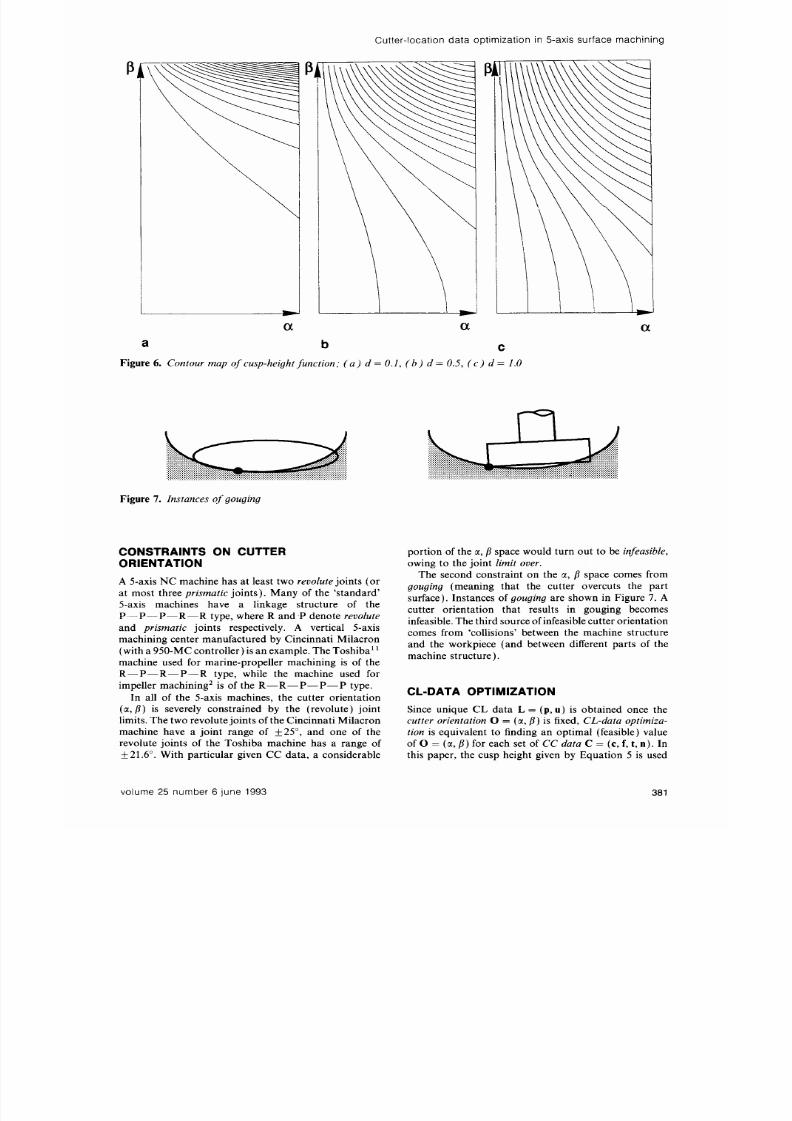
F i g u r e 6 . Con t our ma p o f cusp-he i gh t f un c t i o n; ( a ) d = 0 .1 , ( b ) d = 0 .5 , ( c ) d = 1 .0
Figure 7. I n s t a n c e s o f 9 o u g i n 9
C O N S T R A I N T S O N C U T T E RO R I E N T A T I O N
A 5 - a x i s N C m a c h i n e h a s a t l e a s t t w o revo l u t e j o i n t s ( o r
a t m o s t t h r e e p r i s m a t i c j o i n t s ) . M a n y o f t h e ' s ta n d a r d '
5 - a x is m a c h i n e s h a v e a l i n k a g e s t r u c t u r e o f t h e
P - - P - - P - - R - - R t yp e , w h e re R a n d P d e n o te revolute
a n d p r i s m a t i c j o i n t s r e spec t i ve l y . A ve r t i ca l 5 - ax i s
m a c h i n i n g c e n t e r m a n u f a c t u r e d b y C i n c i n n a t i M i l a c r o n
( w i th a 9 5 0 - M C c o n t r o l l e r ) is a n e x a m p l e . T h e T o s h i b a 1
m a c h i n e u s e d f o r m a r i n e - p r o p e l l e r m a c h i n i n g i s o f th e
R - - P - - R - - P - - R t y p e, w h il e t h e m a c h i n e u s e d f o r
i m p e ll er m a c h i n i n g 2 is o f t h e R - - R - - P - - P - - P t y p e.
I n a l l o f t h e 5 - a x i s m a c h i n e s , t h e c u t t e r o r i e n t a t i o n
( ~ , f l ) is s e v e re l y c o n s t r a i n e d b y t h e ( r e v o l u t e ) j o i n t
l i m i ts . T h e t w o r e v o l u t e j o i n t s o f t h e C i n c i n n a t i M i l a c r o n
m a c h i n e h a v e a j o i n t r a n g e o f _ + 25 , a n d o n e o f t h er e v o l u t e j o i n t s o f t h e T o s h i b a m a c h i n e h a s a r a n g e o f
_ + 21 .6 ° . W i t h p a r t i c u l a r g i v e n C C d a t a , a c o n s i d e r a b l e
p o r t i o n o f t h e ~ , f l s p a c e w o u l d t u r n o u t t o b e infeasible ,
o w i n g t o t h e j o i n t l imi t over .
T h e s e c o n d c o n s t r a i n t o n t h e ~ , f l s p a c e c o m e s f r o m
9ougi n9 ( m e a n i n g t h a t t h e c u t t e r o v e r c u t s t h e p a r ts u r f a c e ) . I n s t a n c e s o f 9 o u g i n 9 a r e s h o w n i n F i g u r e 7 . A
c u t t e r o r i e n t a t i o n t h a t r e s u l t s i n g o u g i n g b e c o m e s
i n f e as i b le . T h e t h i r d s o u r c e o f i n f e a s ib l e c u t t e r o r i e n t a t i o n
c o m e s f r o m ' c o l l i s i o n s ' b e t w e e n t h e m a c h i n e s t r u c t u r e
a n d t h e w o r k p i e c e ( a n d b e t w e e n d i f fe r e n t p a r t s o f t h e
m a c h i n e s t r u c t u re ).
C L - D A T A O P T I M I Z A T I O N
S i n c e u n i q u e C L d a t a L = ( p , u ) is o b t a i n e d o n c e t h e
cut ter o r ientat ion 0 = (ct , f l ) i s f ixed, C L - d a t a o p ti m & a -
tion i s e q u i v a l e n t t o f i n d i n g a n o p t i m a l ( f e a s i b l e ) v a l u eof O = ( ct , f l ) f o r eac h se t o f C C d a t a C = (c , f , t , n) . In
t h i s p a p e r , t h e c u s p h e i g h t g i v e n b y E q u a t i o n 5 i s u s e d
vo lume 25 num ber 6 june 1993 381

7/28/2019 15.Cutter Location Data Optimization in 5 Axis Surface Machining
http://slidepdf.com/reader/full/15cutter-location-data-optimization-in-5-axis-surface-machining 6/10
B K Choi, J W Park and C S Jun
a s a m e a s u r e o f o p t i m a l i t y ( a s s u m i n g t h a t t h e grinding
cost i s p r o p o r t i o n a l t o t h e c u s p h e i g h t ) . T h u s , t h e
C L - d a t a o p t i m i z a t i o n p r o b l e m m a y b e f o r m u l a t e d a s
f o l l ows :
m i n i m i z e H ( a, fl Jd ) ( 6 )
a s g i v e n b y E q u a t i o n 5 , s u b j e c t t o ( a ) n o g o u g i n g , ( b )
n o j o i n t l i m i t o v e r , a n d ( c ) n o c o l l is i o n s .
T h e f o r m u l a t i o n i n E x p r e s s i o n 6 i s a 2 D c o n s t r a i n e d
o p t i m i z a t i o n p r o b l e m . T h e o b j e c ti v e f u n c t i o n is m o n o -
t o n i c ( s e e F i g u r e 6 ) , a n d , a s a r e s u lt , a n o p t i m a l s o l u t i o n
l ie s o n t h e b o u n d a r y o f a fe a si b le r e g io n . T h e r e m a y b e
m o r e t h a n o n e f e a s i b l e r e g i o n o r n o f e a s i b l e r e g i o n a t
a l l . S i nce t he f eas i b l e r eg i on canno t be i den t i f i ed i n
a d v a n c e , s o m e f o r m o f se a r c h t e c h n i q u e h a s t o b e u s e d
t o s o l v e E x p r e s s i o n 6 . A d e s c r i p t i o n o f t h e s e a r c h p r o b l e m
i s g i ven i n F i gur e 8 . T he f i r s t s t ep i s t o i n i t i a l i ze t he
orientat ion 0 = (~ , f i ) f o r t h e c u r r e n t C C d a t a C i =
( e , f , t , n ) . I f t h e C C d a t a c o r r e s p o n d s t o t h e f i r s t p o i n t
o f a t o o l p a t h , t h e orientat ion angles a r e s e t t o ze r o ( i . e .= / 3 = 0 ) . O t h e r w i s e , t h e p r e v i o u s s o l u t i o n ( 7 , / 3 a t
C~_ 1) is used as an ini t ia l va lue.
T h e m a i n l o o p o f t h e s e a r ch p r o c e d u r e h a s t h r e e ' c h e c k '
r o u t i n e s , a n d t w o ' c o m p u t a t i o n ' r o u t i n e s . T h e t h r e e
c h e c k r o u t in e s a r e ( a ) t h e c u t t e r - g o u g i n g c h e c k r o u t i n e ,
( b ) t h e j o i n t l i m i t - o v e r c h e c k r o u t i n e , a n d ( c ) t h e c o l l i si o n
c h e c k r o u ti n e . T h e t w o c o m p u t a t i o n r o u t i n e s a re ( a ) t h e
C L - d a t a c o m p u t a t i o n r o u t i n e ( E q u a t i o n s 1 a n d 2 ) , a n d
( b ) t h e j o i n t - v a l u e c o m p u t a t i o n r o u t i n e ( i n v e r se
k i n e m a t i c s o l u t i o n ).
A t th e b e g i n n i n g o f t h e m a i n l o o p , t h e i n p u t C C d a t a
C i i s c o n v e r t e d t o C L d a t a L~ = ( p , u ) f o r t h e c u r r e n t
orientat ion value 0 = ( ~ , / 3 ) . T he nex t s t ep i s t o check
w h e t h e r t h e m i l l i n g c u t t e r a t L ~ gouges t h e p a r t s u r f a c e .
W h e n n o g o u g i n g i s d e t e c t e d , L ~ i s c o n v e r t e d t o a
jo in t - va lue vec tor J~ by so l v i ng t he inver se k inemat ic
equat ions o f t h e 5 - a x is m a c h i n e . I f a l l t h e c o m p o n e n t s o f
J~ a r e w i t h i n t he i r jo in t l imi t s ( i . e . t he l i mi t - ove r check
is s a t i s f a c t o r y ) , th e n t h e 3 D l o c a t i o n s o f t h e m a c h i n e
c o m p o n e n t s ( u s u a l ly s p in d l e m o t o r s ) a r e c o m p a r e d w i th
t h e w o r k p i e c e f o r a p o s s i b l e c o l l i s i o n .
T o s p e e d u p t h e 9ouging- check a n d coll is ion-check
o p e r a t i o n s , t h e p a r t s u r f a c e r ( u . v ) c a n b e s t o r e d i n anonparametr ic Z map f o r m 7 . F o r a gouging check , t h e Z
v a l u e s o f a s e t o f p o i n t s s a m p l e d f r o m t h e b o t t o m f a c e
o f t h e c u t te r a r e c o m p a r e d w i t h t h e Z m a p o f th e p a r t
s u r f a c e . T h i s a p p r o a c h w a s a p p l i e d i n t h e m a r i n e -
p r o p e l l e r m a c h i n i n g , a n d f o u n d t o b e w o r k i n g f in e .
I f a l l t h e t h r e e ' c h e c k ' r o u t i n e s a r e s a t i s f a c t o r y , w e h a v e
a ' f e a s i b l e ' s o l u t i o n . O t h e r w i s e , t h e c u r r e n t o r i e n t a t i o n
O = ( ~ , f l ) i s an ' i n f eas i b l e ' so l u t i on . O nce a f eas i b l e
s o l u t i o n i s o b t a i n e d , a s y s t e m a t i c s e a r c h i s m a d e ( w i t h i n
t h e f e a s i b l e r e g i o n ) u n t i l n o m o r e i m p r o v e m e n t i s
o b s e r v e d . A t t h i s s t a g e , o n e m a y u s e t h e s o - c a l l e d
f eas ib le -d i rec t ion me th od 12. O n t h e o t h e r h a n d , w h e n t h e
c u r r e n t s o l u t i o n i s a n i n f e a s i b l e o n e , a n e w c u t t e ro r i e n t a t i o n i s t r i e d u n t i l a f e a s i b l e s o l u t i o n i s o b t a i n e d
o r t h e s e a r c h s p a c e i s e x h a u s t e d ( i n t h e l a t t e r c a s e, t h e r e
i s n o f e a s i b l e c u t t e r l o c a t i o n f o r t h e i n p u t C C d a t a C ~ ) .
H e r e , a 2 D grid search m a y b e t h e o n l y c h o i c e i f n o
k n o w l e d g e a b o u t t h e f e a s i b l e r e g i o n i s a v a i l a b l e .
T h e a b o v e s e a r c h p r o c e d u r e i s v e r y t i m e - c o n s u m i n g
i n g e n e r a l b e c a u s e t h e m a i n l o o p n e e d s a c o n s i d e r a b l e
a m o u n t o f c o m p u t a t i o n ( a n d t h e r e a re u s u a ll y th o u s a n d s
o f p i e c es o f C C d a t a ) . I n p a r t i c u l a r , t h e ' g o u g i n g - c h e c k '
a n d t h e ' c o l l i s i o n - c h e c k ' r o u t i n e s h a v e t o d e a l w i t h
v o l u m e - i n t e r s e c t io n p r o b l e m s , a n d t h e i n v e r se k i n e m a t i c
s o l u t i o n m a y n e e d n u m e r i c a l , ~ te ra ti on s. I f w e h a v e s o m e
i n f o r m a t i o n a b o u t t h e s h a p e o f t h e f ea s i b le r e g io n , a m o r e
e f f ic i e n t s e a r c h m e t h o d c a n b e d e v i s e d , a s w i ll b e s e e n i n
t h e n e x t s e c t i o n .
] T r y n e w o t,1 3 )]
ir
I Initialize =(a,l~) I
I Comp,,teCL-OataL=~p,,,) ]
( Ooo,in,C h k
I C o m p u t e o i n tV a lu e s J Il
N o O ~
[ T r y n e w ( o t,[ 3 )]
N o
F i g u r e 8 . Search procedure for CL - da ta o p t imiza t ion
5 - A X I S F A C E M I L L I N G O F M A R I N EP R O P E L L E R S
T h e a u t h o r s h a v e d e v e l o p e d a d e d i c a t e d p ie c e o f
C aM s o f t w a r e 3 f o r t h e 5 - a x is m a c h i n i n g o f l a r g e
m a r i n e p r o p e l l e r s ( u p t o 1 0 m i n d i a m e t e r a n d 6 0
t o n s i n w e i g h t ) f o r a s h i p - b u i l d i n g c o m p a n y i n
K o r e a . T h e p a r t s ( c o p p e r - a l l o y c a s t i n g ) a re m a c h i n e d
o n a d u a l - s p i n d l e 5 - a x is T o s h i b a 11 m a c h i n e . A n o v e r a l l
v i e w o f t h e m a c h i n e i s s h o w n i n F i g u r e 9 . A p a r t t o b e
m a c h i n e d i s l o a d e d o n t o t h e t ab l e w h i c h p r o v i d e s t h e C
mot ion o f th e m a c h i n e . T h e k i n e m a t i c s t r u c t u r e o f t h e
m a c h i n e i s e a s il y m o d e l e d u s in g t h e D e n a v i t - H a t e n b e r g
r e p r e s e n t a t i o n 1 3, b u t a n i t e r a ti v e n u m e r i c a l s e a r c h
is r e q u i r e d t o o b t a i n t h e i n v e r s e k i n e m a t i c s o l u t i o n 3 .
F a c e - m i l l i n g c u t t e r s o f a b o u t 2 5 c m i n d i a m e t e r a r e
u s e d f o r t h e m a c h i n i n g o f th e m a r i n e p r o p e l le r s .
T h e f a c e - m i l l i n g c u t t e r i s s h o w n i n F i g u r e 1 0 .
T h e c o m p a n y h a s b e e n p r o d u c i n g m a r i n e p r o p e l l e r s
f o r y e a r s b y u s i n g a p r o p r i e t a r y p i e c e o f C aM s o f t w a r e
f r o m a J a p a n e s e c o m p a n y o n a l ic e n s ed b a s is . C u r r e n t l y ,a c o m m e r c i a l C AD s y s t e m i s b e i n g u s e d i n d e s i g n i n g t h e
m a r i n e p r o p e l l e r s . T h e p a r t s u r f a c e ( i . e. o n e s i d e o f th e
382 computer-aided design

7/28/2019 15.Cutter Location Data Optimization in 5 Axis Surface Machining
http://slidepdf.com/reader/full/15cutter-location-data-optimization-in-5-axis-surface-machining 7/10
Cutter- loca t ion d ata opt imizat ion in 5-ax is surface mac hin ing
R A M ( B )
F i g u r e 9 . Du a l - sp in d l e 5 -a x i s ma ch in e
Figure 10 . Fa ce-mi l l i n g cu t t er u sed i n 5 -a x& ma ch in # ~9
F igure 11 . S u r f a c e o f o n e s i d e o f b l a d e
b l a d e ) o f a t y p i c a l m a r i n e p r o p e l l e r i s d e f i n e d i n it i a l ly a s a
1 3 × 18 a r r a y o f 3 D p o i n t s ; t h e n u m b e r o f p o i n t s i n
t h e r a d i a l d i r e c t i o n ( c a l l e d t h e v d i rec t i o n ) is 18,
a n d t h a t i n t h e c i r c u l a r d i r e c t i o n (u d i rec t i o n ) is 13.
T h e 1 3 3 D p o i n t s i n t h e u d i r e c t i o n s e q u e n c e l i e o n
a c o n c e n t r i c c i r c l e . F r o m t h e i n p u t d a t a a r r a y , ach o rd - l en g th sp l i n e su r fa ce i s c o n s t r u c t e d w h i c h i s
s im i la r to the n o n u n i fo rm B- sp l i n e su r fa ce- f i t t i n g
m e t h o d i n t r o d u c e d i n R e f e r e n c e 7. A v i ew o f th e
resu l t ing com pos i t e su r face (cons i s t ing o f 12 x 17
b i c u b i c p a t c h e s ) i s s h o w n i n F i g u r e 1 1 .
I n t h e m a r i n e - p r o p e l l e r m a c h i n i n g , c u t t e r - c o n t a c t
p a t h s a r e g e n e r a t e d i n
c i r c u l a r d i r e c t i o n ) . T h e
i n t e r v a l s i n c e n t i m e t e r s
a r e a s f o l l o w s :
< 3 m d i a m e t e r b l a d e :
the u d i rec t ion ( i . e . the
' t e c h n i c a l d a t a ' f o r p a t h
( f o r a N A C A - t y p e b l a d e )
8 ( - 0 . 4 R ) ; 1 0 ( 0 . 5 - 0 . 9 R ) ; 6 ( 0 . 9 5 -1 . 0 R )
3 - 5 m d i a m e t e r b l ad e :
1 0 ( - 0 . 4 R ) ; 1 2 ( 0 . 5 - 0 . 9 R ) ; 7 ( 0 . 9 5 - 1 . 0 R )
5 - 7 m d i a m e t e r b l a d e :
1 2 ( - 0 . 4 R ) ; 1 4 ( 0 . 5 - 0 . 9 R ) ; 8 ( 0 . 9 5 - 1 . 0 R )
> 7 m d i a m e t e r b l a d e :
1 4 ( - 0 . 4 R ) ; 1 6 ( 0 . 5 - 0 . 9 R ) ; 9 (0 . 9 5 - 1 . 0 R )
F or t echn ica l reasons , the b lade sur face i s d iv ided
i n t o t h r e e r e g i o n s , a n d d i f f e r en t v al u e s o f p a t hin te rva l s a re spec i f i ed . In the above exam ple , the
t h r e e r e g i o n s a r e t h e r e g i o n w i t h i n 0 . 4 r a d i u s o f t h e
b l a d e , t h e r e g i o n b e t w e e n 0 . 5 r a d i u s a n d 0 . 9 r a d i u s ,
a n d t h e r e g i o n o v e r 0 .9 5 r a d i u s . I f c u t t e r - c o n t a c t
p a t h s a r e g e n e r a t e d a c c o r d i n g t o t h e a b o v e s p e c i f ic a t io n ,
a b o u t 2 0 o r m o r e p a t h s a r e o b t a i n e d a l o n g ' v - co n s ta n t '
i soparametric l ines .
F u r t h e r , t h e a l l o w e d r a n g e o f t h e t i l t anole is
2 - 1 5 ° , a n d t h e ya w a n g les i n th e m a c h i n i n g c o n f i g u r a t i o n
a r e a l w a y s n e g a t i v e ( t h e y a r e n o t a l l o w e d t o e x c e e d
- 8 5 °) . I n s u m m a r y , w e h a v e
2 ~ < a ~ < 1 5
-85~</~<0
d ~ 0 . 8
In th i s pa r t i cu la r case , the feas ib le reg ion fo r typ ica l
C C d a t a i s a l w a y s o f t h e s h a p e s h o w n i n F i g u r e 1 2
2 4 G 8 !o 12 t4
° i i i J J J i J i ii i i i i i i i i i i i i J l i i i i i i H i ii i i i i i i i i i i i i i i i i !| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | ~
- 2 ° ~ J J ! J ~ J ~ J i ~ i i ~ J J i J i l J i i J i J i ~ J J ~ i i l J J J J J J ~ J ~ i J J ~ #
~ i i ii i iE ~ i i ilm l i lj i ii i ii i ii i ii i ii i iiH i i ii ! ! ~ ' '" ' -
- ~ ° | [ [ J i i i i i i i i i ! i i i i '
i i i i | j ! i i i | i i i i i i ~m m i i i i i i i i i ~
_oo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
= : : = = ~ l l l l = = ~ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
- 7 0 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : :: : : : : : : : : : : : : : : : : : : : : : : : : : : : : : . . . . . . . . . . .
= ~ = = = ~ = . = = = © . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
-8 0 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : :
= = == = ~== == = = . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
F i g u r e 1 l F e a s i b l e r e g i o n f o r t y p i c a l C C - d a t a
vo lume 25 num ber 6 june 1993 383

7/28/2019 15.Cutter Location Data Optimization in 5 Axis Surface Machining
http://slidepdf.com/reader/full/15cutter-location-data-optimization-in-5-axis-surface-machining 8/10
B K Choi, J W Park and C S Jun
( w e h a v e y e t t o d e t e r m i n e t h e r e a s o n ) . F o r s o m e
C C - d a t a p o i n t s , h o w e v e r , t h e f e a s i b l e r e g i o n g r o w s
t o cov e r t he en t i r e dom ai n ( i .e . ~ e [ 2 , 15] , / 3 e [ - 85 , 0 ] )
o r s h r i n k s a n d d i s a p p e a r s ( i. e . n o f e a s ib l e s o l u t i o n e x i s ts ).
T o a v o i d a n e x p e n s i v e 2 D s e a r c h , a s m o o t h search
curve c a n b e d e f i n e d f o r t h e ~ , / 3 d o m a i n , f r o m t h e
l o w e s t c u s p - h e i g h t p o i n t ( ~ = 2 a n d /3 = 0 ) t o t h e
h ig h es t p o i n t ( ~ = 15 a n d / 3 = - 8 5 ) a s s h o w n inF i g u r e 1 3. T h e c u r v e s h o u l d p a s s t h r o u g h t h e
f eas i b l e r eg i on i f i t ex i s t s . T hus , t he s ea r ch cur v e
s h o u l d b e s e l e c te d f r o m a f a m i l y o f c u r v e s l o c a t e d
a b o v e t h e d i a g o n a l l i n e j o i n i n g t h e u p p e r - l e f t c o r n e r
(c~ = 2 , /3 = 0 ) an d t he bo t t om - r i g h t co r ne r ( ~ = 15 ,
/3 = - 8 5 ) o f t h e d o m a i n . T h e a c t u a l s h a p e o f t h e
s e a r c h c u r v e m a y b e d e t e r m i n e d b y c h a n g i n g i t s
f u l l nes s .
T h e r e q u i r e m e n t f o r t h e s e a r c h c u r v e i s m e t b y a
c o n i c - s e c t i o n c u r v e . T h u s , a r e a s o n a b l e c h o i c e fo r
t h e p a r a m e t r i c s e a r c h c u r v e r ( u ) i s a ra t i ona l
quadratic' Bb zier curv e 7 wi t h i t s t h r ee con t ro l ver t i ces
V i a t t h e c o r n e r s o f th e r e c t a n g u l a r d o m a i n , a s
s h o w n i n F i g u r e 1 4 . N a m e l y ,
V 1 = p ( 2 , O )
V 2 = q ( 1 5 , 0 )
V 3 : S(15, --8 5)
T h e f u l l nes s o f th e c u r v e i s ea s i ly c o n t r o l l e d b y
v a r y i n g t h e mi ddl e we i gh t 09 o f t h e r a t i o n a l c u r v e .
W e t r i e d d i f f e r e n t v a l u e s o f co , a n d f o u n d t h a t ~o = 1
w a s a g o o d c h o i c e ( m a k i n g i t a n o n r a t i o n a l c u r v e ) .
T h e s e a r c h p r o c e d u r e o f F i g u r e 9 h a s b e e n
i m p l e m e n t e d a s a 1 D s e a r c h a l o n g t h e s e a r c h c u r v er ( u ) o f F i g u r e 1 4. T h e 1 D ( b i n a r y ) s e a r c h w a s f o u n d
t o b e v e r y e ff ic ie n t ( c o m p a r e d w i t h t h e 2 D s c h e m e ) ,
w i t h o u t t h e r e b e i n g a n o t i c e a b l e d i f f e r e n c e i n t h e
q u a l i t y o f t h e s o l u t i o n . A t t h e e a r l y s t a g e o f th e
d e v e l o p m e n t , a v e r s io n o f th e 2 D s e a r ch s c h e m e w a s
i m p l e m e n t e d , b u t w a s f o u n d t o b e i m p r a c t i c a l ,
b e c a u s e it t o o k f o r e v e r t o c o m p u t e ' o p t i m a l ' C L
d a t a o n a 3 8 6 I B M P C ( w e d id n o t r e a c h t h e e n d
o f t h e r u n , b u t i t w a s e x p e c t e d t o t a k e m o r e t h a n
5 0 h t o p r o c es s th e d a t a f o r a m a r i n e p r o p e l l e r ) .
T h e c o m p a n y i s c u r r e n t l y u s i n g t h e CAM s o f t w a r e
- 8 5
0(2, O)
S e a r c h r e g io n
t
F i g u r e 13 . R e q u i r e m e n t o f s e a rc h c u r v e
q (15, O)
s (15, - 85)
p = V 1 q = V 2
S e a r c h r e g io n
s = V 3
F i g u r e 14 . R at i ona l B kz i e r s earch curve
r u n n i n g o n 3 8 6 I B M P C s , a n d i t t a k e s a b o u t 2 h
t o c o m p l e t e t h e j o b ( o f F i g u r e 1 ) f o r a la r g e - s iz e
m a r i n e p r o p e l le r . O f t h e 2 h , t h e C L - d a t a o p t i m i z a t i o ns t e p a l o n e i s e x p e c t e d t o t a k e a b o u t 4 0 ra i n .
A s t o t h e a c t u a l t i m e r e q u i r e d f o r a c o m p l e t e
5 - a x i s m a c h i n i n g , t h e c o m p a n y s t a t e s t h a t i t t a k e s
a b o u t 4 0 h o f N C m a c h i n i n g ( e x c l u d i n g th e s e tu p
t i m e ) f o r a n 8 m ( in d i a m e t e r ) m a r i n e p r o p e l l e r ,
a n d a b o u t 6 0 h f o r a 9 . 8 m p r o p e l l e r . T h e g r i n d i n g
o p e r a t i o n s a r e p e r f o r m e d m a n u a l l y b y s k i ll e d o p e r a t o r s ,
w h i c h a l s o t a k e s a f e w d a y s , i n c l u d i n g h a n d l i n g . A s t o
t h e o p t i m a l i ty o f t h e p r o p o s e d C L - d a t a o p t i m i z a t i o n
m e t h o d , t h e a u t h o r s o f t h e p a p e r w e r e n o t a b l e t o v e r if y
i t ( e x p e r i m e n t a t i o n w i t h m a r i n e p r o p e l l e r s w a s n o t
p e r m i t t e d , b e c a u s e t h e p r i c e o f a t y p i c a l m a r i n e p r o p e l l e r
is se v e ra l h u n d r e d t h o u s a n d d o l l a rs ) . T h e c o m p a n y s t a te s
t h a t t h e C AM s o f t w a r e d e v e l o p e d b y t h e a u t h o r s
r e s u l t e d i n a c o n s i d e r a b l e s a v i n g i n m a c h i n i n g t i m e
w h i l e g i v i n g a n i m p r o v e d m a c h i n e d q u a l i t y ( c o m p a r e d
w i t h t h e p r e v i o u s v e r s i o n ) .
C O N C L U S I O N S
I n t h e p a p e r , t h e C L - d a t a o p t i m i z a t i o n p r o b l e m i n
5 - a x i s f a c e m i l l i n g i s f o r m u l a t e d a s a 2 D c o n s t r a i n e d
m i n i m i z a t i o n p r o b l e m i n t e r m s o f th e cu t t e r -or i en t a t i on
angles or,/3. T o u s e t h e c u s p h e i g h t a s t h e o b j e c t i v ef u n c t i o n o f t h e o p t i m i z a t i o n p r o b l e m , a n a n a l y t ic
e x p r e s s i o n o f t h e c u s p h e i g h t i s o b t a i n e d i n t e r m s o f t h e
t i l t ang l e ~ , yaw ang l e / 3 , a n d pat h i n t e rva l d .
T h e p r o p o s e d o p t i m i z a t i o n s c h e m e h a s b e e n a p p l i e d
t o t h e 5 - a x is f a c e m i ll i n g o f m a r i n e p r o p e l l e r s . I n t h is
s p e c if ic a p p l i c a t i o n , th e o p t i m i z a t i o n p r o b l e m h a s b e e n
e f f ic i e n tl y i m p l e m e n t e d a s a 1 D s e a r c h p r o b l e m .
H o w e v e r , a f u r t h e r s t u d y i s n e e d e d t o u n d e r s t a n d t h e
s t r u c t u r e o f t h e C L - d a t a o p t i m i z a t i o n p r o b l e m i n g e n e ra l .
I n t h e p a p e r , i t i s a s s u m e d t h a t t h e c u t t e r p a t h p l a n n i n g
i s pe r f o r med o f f l i ne , bu t i t w i l l be i n t e r e s t i ng t o s ee
w h e t h e r t h e p r o p o s e d C L - d a t a o p t i m i z a t i o n s c h e m e c a n
b e e x t e n d e d t o o n li n e c u t te r p a t h p l a n n i n g ( m e a n i n gt h a t t h e c u t t e r p a t h p l a n n i n g a n d t h e C L - d a t a
o p t i m i z a t i o n a r e c o n s i d e r e d a t t h e s a m e t i m e ) .
384 computer-aided design

7/28/2019 15.Cutter Location Data Optimization in 5 Axis Surface Machining
http://slidepdf.com/reader/full/15cutter-location-data-optimization-in-5-axis-surface-machining 9/10
Cutter- loca t ion da ta opt imizat ion in 5-ax is surface mach in ing
R EFER EN C ES
1 M a s o n , F '5 x 5 f o r h i g h - p r o d u c t i v i t y a i r fo i l m i l l i n g '
Amer. Machinist ( N o v 1 9 9 1 ) p p 3 7 - 3 9
2 T a k e u e h i, Y e t aL ' 5 -a x i s c o n t r o l m a c h i n i n g b a s e d o ns o l i d m o d e l ' J. Precision Eng. Vol 56 N o 11 (1990)
p p 1 1 1 -1 1 6 ( i n J a p a n e s e )
3 Choi , B K et al. ' D e v e l o p m e n t o f a 9 -a x is m a r i n ep r o p e l l e r m a c h i n i n g s y s t e m ' Project Report K o r e a
A d v a n c e d I n s t i t u t e o f S c i e n c e & T e c h n o l o g y , K o r e a
( 1 9 9 1 ) ( i n K o r e a n )
4 M a r e i n i a k , K ' I n f l u e n c e o f s u r fa c e s h a p e o n
adm is s ib le too l pos i t ions in 5 -ax i s face m i l l ing 'Comput.-AidedDes. V o 1 1 9 N o 5 ( 1 9 8 7 ) p p 2 3 3 - 2 3 6
5 T a y l o r , R ' P l a n n i n g a n d e x e c u t i o n o f s t r a i g h t li n e
m a n i p u l a t o r t r a je c t o r ie s ' in B r a d y , M ( E d . ) RobotMotion: Planning and Control M I T P r e s s , U S A( 1 9 8 2 ) p p 2 6 5 - 2 8 6
6 Choi , B K et aL ' C o m p o u n d s u r f a c e m o d e l i n g a n d
m a c h i n i n g ' Comput.-Aided Des. V o l 2 0 N o 3 ( 1 9 8 8 )p p 1 2 7 - 1 3 6
7 Choi , B K Surface Modeling for CAD/CAM Elsev ie r( 1 9 9 1 )
8 K i m , D H a n d C h o i , B K ' C a l c u l a ti o n o f e c o n o m i c
C L - d a t a f o r s c u l p tu r e s u r f a ce m a c h i n i n g ' J. KIIE V o l9 N o 2 (1 9 8 3 ) p p 2 7 - 3 5 ( i n K o r e a n )
9 L o n e y , G C a n d O z s o y , T M ' N C m a c h i n i n g o f f r eef o r m s u r f a c e s ' Comput.-Aided Des. V o l 1 9 N o 2( 1 9 8 7 ) p p 8 5 - 9 0
10 Vieke rs , G W a n d Q u a n , K W ' Ba l l -m i l l s ve rsuse n d - m i l l s f o r c u r v e d s u r f a c e m a c h i n i n g ' J . Eng.Industry (Trans. ASME) Vol 111 (1989) pp 22 26
11 TOSNUC 600M Instruction Manual T o s h i b aM a c h i n e ( 1 9 85 )
1 2 G o t t f r i e d , B S a n d W e i s m a n , J Introduction toOptimization Theory P r e n t i c e - H a l l ( 1 9 73 )
13 C ra ig , J J Introduction to Robotics A d d i s o n - W e s l e y( 1 9 8 6 )
A P P E N D I X
Y
E1
, (m , n ) ~ L
x
a
x = l
Eo
. (re,n) L
X
bI '
F igure 15 . Construction for cusp-height calculation
I f the ab ove e l l ipses a re s ca led in the y d i rec t ion by
1/a, the equ a t ion s o f the re su l t ing c i rcle s a re
X2 + y2 = 1
for Co , and (8 )
( x - m ) 2 + ( y - k ) 2 = 1
for Ca , where k = n/a = d s in O/a. T h e c o n d i t i o n f o r t h e
two ' lower-ha l f ' c i rc le s ( i . e . e l l ipses ) to in te rs ec t i s tha t
t h e d i s t a n c e b e t w e e n t h e p o i n t ( 1 , 0 ) a n d t h e c e n t e r p o i n t
of C a i s le s s than 1 . Th a t i s , we n eed to have
((m -- 1) 2 + ( k - 0)2 ) 1/2 ~< 1 (9 )
Derivation of cusp-height Equation 5
T h e minor radii of the e l l ipses in F i gure 15 a re a a nd the
m a jor rad i i a re 1 . The s econd e l l ipse E 1 i s ob ta ined by
t r a n s l a t i n g E o b y d i n t h e d i r e c t i o n o f 0. N o t e t h a t t h e
cusps in F igure 15 a re the s am e as the cusps in F igure
5 . T h e h e i g h t o f t h e c u s p i s th e d i s t a n c e b e t w e e n t h e
intersection point p a n d t h e common tangent line L. T h e
e q u a t i o n s o f th e e l l ip s e s i n F i g u r e 1 5 a re
x 2 + y2/a2 = 1
f o r E o , a n d ( 7 )
( x - m ) 2 + ( y - n ) 2 / a 2 = 1
for E 1, wh ere a = s in ~ cos /~ , m = d cos 0, an d n = d s in 0.
E q u a t i o n 4 f o r th e critical value of d is a d i rec t re su l t o f
t h e a b o v e r e l a t io n . F u r t h e r , i f m is g r e a t e r t h a n 2 , w h i c h
i s equ iva len t to d > 2 /cos 0 , the cusp i s unde f ined .
I f t h e c o n d i t i o n i n E x p r e s s i o n 9 h o l d s , t h e i n t e r s e c t i o n
p o i n t p i n F i g u r e 1 5 a i s o b t a i n e d b y s o l v i n g E q u a t i o n s
8 , a n d t h e n s c a l i n g b a c k t h e y v a l u e :
w h e r e
P = (Px, Py) (10)
Px= (re+s)~2
py = -- a( 1 -- px2) 1/2
s 2 = k 2 ( 4 _ m 2 _ k z ) / ( m 2 + k 2)
vo lume 25 num ber 6 june 1993 385

7/28/2019 15.Cutter Location Data Optimization in 5 Axis Surface Machining
http://slidepdf.com/reader/full/15cutter-location-data-optimization-in-5-axis-surface-machining 10/10
B K Choi, J W Park and C S Jun
I f E x p r e s s i o n 9 d o e s n o t h o l d , t h e i n t e r s e c t i o n p o i n t p
i n F i g u r e 1 5 b i s g i v e n b y
p~, = 1
a n d
py = n - a( 2m - m2) 1/2
S i n c e t h e u n i t n o r m a l v e c t o r o f t h e t a n g e n t l i n e L is g i v e n
b y
n = ( s i n O , - c o s O )
a n d t h e d i s t a n c e o f L f r o m t h e o r i g i n is
a o = sin
t h e d i s t a n c e b e t w e e n p a n d L , n a m e l y t h e c u s p h e i g h t ,
i s e x p r e s s e d a s
H = s i n ~ - p . n ( l l )
R e a r r a n g i n g t h e t e r m s i n E q u a t i o n 1 1, t h e c u s p - h e i g h tE q u a t i o n 5 i s o b t a i n e d .
386 com puter-a ide d des ign