103158322 transistor bjt como conmutador
TRANSCRIPT

REPÚBLICA BOLIVARIANA DE VENEZUELA
MINISTERIO DEL PODER POPULAR PARA LA DEFENSA
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITÉCNICA
DE LA FUERZA ARMADA BOLIVARIANA
“RESPUESTA EN FRECUENCIA DE AMPLIFICADORES”
Asignatura: ELECTRÓNICA II
PROFESOR: Ing. Hendri Guzman.
VI SEMESTRE – INGENIERIA DE TELECOMUNICACIONES
Turno: Nocturno
Jueves, 24 de Noviembre de 2011
Alumno:
Nombres y Apellidos: Cedula de Identidad:
Freddy J. Colina H. 7.570.993
Alez Zane 14.765.165
Darwing Castañeda 18.493.472

INDICE
Contenido Pág.
Introducción 03Frecuencias de corte y ancho de banda de un amplificador 05
Frecuencia de corte 06Comprobaciones simples del diagrama de Bode 07
Respuesta de baja frecuencia en:Efectos de condensadores de acoplo y desacoplo 08
Configuraciones de amplificadores BJT y FETTransistor de unión Bipolar (BJT) 11
Amplificador en modo común 15Amplificador en modo común con resistenciade emisor 15Amplificador en base común 16Amplificador en colector común 18
Transistores de Efecto de Campo (FET) 20Ventajas de los FET 20Limitaciones en el uso de los FET 21Polarización de los FET 21
Uso de la superposición en la serie de polos dominantesRespuesta de alta frecuencia en:
Modelo para alta frecuencia del BJTModelo para alta frecuencia del FET
Efecto en las capacitancias parásitas internas de los transistoresComportamiento a altas frecuencias de las diferentes configuraciones de amplificadores BJT y FET.Producto de ganancia: Ancho de banda
Respuesta en frecuencia de etapas en cascadaRespuesta en frecuencia de amplificadores realimentadosEl transistor como conmutador y velocidad de respuesta de un Amplificador contra un ancho de bandaConclusiónBibliografía

INTRODUCCIÓN
La respuesta en frecuencia sirve como una herramienta de análisis de un sistema en general y de un circuito en particular y permite predecir la respuesta del circuito sobre un rango de frecuencias, cuyos resultados son gráficos de amplitud y fase. Muchas áreas de la ingeniería usan esta técnica, como las comunicaciones donde el comportamiento en frecuencia es fundamental para interpretar la operación del circuito.
Con la introducción de los amplificadores electrónicos, la telefonía de larga distancia comenzó a ser posible luego de la primera guerra mundial. Sin embargo a medida que las distancias crecían, también lo hacían las pérdidas de energía. En la imposibilidad de aumentar el diámetro de los conductores, se incrementaban el número de amplificadores para recuperar la energía perdida. Desafortunadamente un mayor número de amplificadores resultaba en mayor distorsión dadas las pequeñas no linealidades de las válvulas usadas entonces en los amplificadores. Para resolver este problema se creó el amplificador realimentado. Cuanto más se desea disminuir la distorsión, mas se debe realimentar. Pero esto lleva casi inevitablemente a la inestabilidad. Nyquist en 1932 desarrolló un teorema que permitía analizar la estabilidad gráficamente a partir de la respuesta en frecuencia del lazo realimentado. Desde este trabajo, se comenzó a desarrollar intensivamente esta técnica de análisis que Bode en 1945 presento extensiva y detalladamente.
El amplificador nace como un conjunto específico de transistores y componentes periféricos que se integran en un solo circuito para realizar una función específica. El amplificador, además, fue uno de los primeros circuitos integrados que se fabricaron como tales. El tipo de amplificador integrado en un chip se utilizó en la era de la integración electrónica pero en dispositivos de cálculo analógico. Dichas máquinas realizaban cálculos matemáticos mediante funciones electrónico-matemáticas, tales como la "integración" y la "diferenciación". Posteriormente, debido a sus excelentes características se comenzaron a fabricar en forma continua e integrada, hasta llegar a la época actual donde puede contemplarse como un ente compacto y diferenciado dentro del diseño electrónico.
Actualmente, en lugar de diseñarse un amplificador perfectamente detallado con sus etapas individuales a base de decenas de componentes, se suele diseñar un circuito con unos cuantos amplificadores operacionales encapsulados y unos pocos elementos básicos, tales como resistencias, condensadores y diodos. Entre las ventajas que se consiguen se tiene en primer lugar una mayor sencillez en el diseño, su ganancia y su respuesta en frecuencia, son controladas con precisión mediante elementos pasivos estables.
DESARROLLO
El análisis de amplificadores está limitado en un rango de frecuencias, que normalmente permite ignorar los efectos de los elementos capacitivos, considerando únicamente elementos resistivos y fuentes. Los efectos en frecuencia introducidos por condensadores de gran valor, generalmente externos, que limitan la frecuencia baja de operación del amplificador, y condensadores internos a los dispositivos activos que limitan su comportamiento en alta frecuencia. Generalmente, el análisis en frecuencia de un amplificador se realiza sobre un rango muy variable de valores de frecuencia. Para facilitar su caracterización se utiliza escalas logarítmicas en términos de decibelio. Inicialmente, el decibelio tuvo su origen para establecer una relación entre potencia y niveles de audio en escala logarítmica. Así, un incremento de nivel de potencia, por ejemplo de 4 a 16 W, no corresponde con un nivel de audio multiplicado por un factor de 4 (16/4), sino de 2 puesto que (4)2. La definición de bel, cuyo nombre se debe a Alexander Graham Bell, relativa a dos niveles de potencia P1 y P2 es:
El bel es una unidad demasiado grande y para aplicaciones prácticas se utiliza el término decibelio (dB) definido como 1dB=0.1bel o
Existe una segunda definición del decibelio aplicada más frecuentemente que opera sobre tensiones en vez de potencias. Si consideramos la potencia disipada por una resistencia, Pi=(Vi)2/Ri, entonces sustituyendo se obtiene:
En la tabla se indica la conversión de entre la ganancia de un amplificador y su representación en dB. Por ejemplo, -6dB es un amplificador con una atenuación de 0.5, 0 dB corresponde a un amplificador de ganancia 1, 20 dB ganancia 10.

FRECUENCIAS DE CORTE Y ANCHO DE BANDA DE UN AMPLIFICADOR
Por medio de los diagramas de Bode se puede demostrar que las funciones de un circuito pueden trazarse gráficamente en función de frecuencia de forma rápida y fácil, al menos para circuitos sencillos.
Existen varias razones para desear obtener un diagrama de la magnitudy la fase de cualquier función considerando que toda señal está formada por una suma de componentes senoidales. Las señales de audio contienen componentes que varían entre 20 Hz y 20 kHz. Para los electrocardiogramas, el intervalo está entre 0,05 Hz y 100 Hz, y para las señales de vídeo entre el valor de continua y 4,5 MHz. Para amplificar una señal sin distorsión, la ganancia del amplificador debe ser la misma para todas las componentes de frecuencia. Si se tiene una gráfica de la ganancia en función de la frecuencia, se puede ver si la ganancia es constante o no para todas las componentes de frecuencia de la señal de interés.
Los diagramas de Bode de la ganancia y fas del amplificador en función de la frecuencia resultan muy útiles para evitar oscilaciones no deseadas.
Para el análisis, se utiliza la variable s de la transformada de Laplace, se tiene como ejemplo, la función de transferencia de tensión del circuito mostrado en la figura y aplicando el principio del divisor de tensión, se puede hallar la relación entre la tensión de salida y la tensión de entrada.
Multiplicando el numerador y denominador por sC, se obtiene:

Las funciones de los circuitos lineales que no varían en función del tiempo, siempre pueden expresarse como una relación de polinomios en la variable s. En este caso, el numerador es simplemente una constante, y el denominador es un polinomio de primer orden. En circuitos más complejos, el numerador y el denominador pueden ser ambos polinomios de orden superior.
Las funciones de transferencia para circuitos lineales pueden expresarsecomo cocientes de polinomios en la variable s de Laplace. Las raíces del numerador se denominan ceros, y las del denominador, polos. Los valores de s que hacen que el polinomio del denominador sea igual a cero se denominan polos de la función de transferencia. La magnitud de la función de transferencia no está limitada en los polos. Los valores de s que hacen que el numerador sea igual a cero se denominan ceros de la función de red. Por tanto, los polos son las raíces del polinomio del denominador, y los ceros son las raíces del polinomio del numerador.
Frecuencias de corte
En el análisis senoidal en régimen permanente de cualquier circuito, se utiliza
en lugar de la variable transformada de Laplace s. Si sustituimos en la Ecuación , tenemos:
Esta es una expresión compleja que proporciona la magnitud y la fase de la función de transferencia de tensión en función de la frecuencia. Por
ejemplo, si evalua la ecuación para , se obtiene:
El significado de este resultado es que, si se aplica una senoide de frecuencia:
a la entrada, la salida tendrá una amplitud que es 0,707 veces la amplitud de entrada. Además, la salida estará desfasada -45º respecto de la entrada.
Resulta conveniente expresar la ecuación como:

se denomina frecuencia de corte. Otros nombres alternativos para fb son frecuencia de codo, frecuencia de potencia mitad, y frecuencia para 3-dB.
Comprobaciones simples del diagrama de Bode
A menudo, para frecuencias muy altas o muy bajas, un circuito se vuelve lo suficientemente sencillo como para que los resultados puedan encontrarse por simple inspección. Por ejemplo, las características principales de la curva de ganancia mostrada en la figura pueden comprobarse analizando el circuito para frecuencias muy bajas y muy altas. Para frecuencias muy bajas, el condensador se comporta como un circuito abierto. En consecuencia, no fluye corriente alguna por el circuito, no se produce caída de tensión en R1, y la tensión de salida es igual a la tensión de entrada. Por tanto, la magnitud de la ganancia de tensión es igual a la unidad, de acuerdo con la ganancia dibujada de 0 dB para bajas frecuencias.

Para frecuencias muy altas, el condensador se comporta como un cortocircuito. Luego el circuito se reduce a un divisor de tensión resistivo con una ganancia de:
EFECTOS DE CONDENSADORES DE ACOPLO Y DESACOPLO
La presencia de condensadores en un amplificador hace que la ganancia de éste dependa de la frecuencia. Los condensadores de acoplo y desacoplo limitan su respuesta a baja frecuencia, y los parámetros de pequeña señal de los transistores que dependen de la frecuencia, así como las capacidades parásitas asociadas a los dispositivos activos limitan su respuesta a alta frecuencia. Además un incremento en el número de etapas amplificadoras conectadas en cascada también limitan a su vez la respuesta a bajas y altas frecuencias.
En la figura. se muestra la ganancia de un amplificador en función de la frecuencia. Claramente se identifican tres zonas: frecuencia bajas, frecuencias medias y frecuencias altas.
A frecuencias bajas, el efecto de los condensadores de acoplo y desacoplo es importante.
A frecuencias medias, esos condensadores presentan una impedancia nula pudiéndose ser sustituidos por un cortocircuito.
A frecuencias altas, las limitaciones en frecuencia de los dispositivos activos condicionan la frecuencia máxima de operación del amplificador.

Esas zonas están definidas por dos parámetros: frecuencia de corte inferior o ƒL y frecuencia de corte superior o ƒH. Ambos parámetros se definen como la frecuencia a la cual la ganancia del amplificador decae en 1/ 2 o 0.707 con respecto a la ganancia del amplificador a frecuencias medias. El ancho de banda del amplificador o bandwidth (BW) se define como:
En la figura anexa se indica la respuesta en frecuencia de un amplificador sin condensadores de acoplo y desacoplo. En este caso el amplificador solo tiene frecuencia de corte superior al ser ƒL=0 con capacidad de amplificar señales DC.
En la región de baja frecuencia, los condensadores externos de acoplo y desacoplo fijan la frecuencia de corte inferior. Los modelos que se utilizan para determinar esta ƒL están basados en el análisis de redes RC. En la red RC de la figura es fácil observar que el condensador se comporta como un cortocircuito a frecuencias muy altas y un circuito abierto a frecuencias muy bajas. En general, la relación entre la tensión de salida y entrada se expresa como:
La magnitud de la relación anterior viene dada por:
La frecuencia de corte inferior, ƒL, se define como a la frecuencia a la cual |Av|
decae en es decir,

(1)
En términos de decibelios sería equivalente a:
Es decir, ƒL se define como la frecuencia a la cual decae en 3 dB la ganancia del circuito respecto a la ganancia a frecuencias medias (Av=1). Sustituyendo la ecuación anterior en (1), resulta,
La magnitud y fase de esta expresión compleja es,
Desarrollando la expresión de la magnitud en términos de dB se obtiene,
(1.2)Para frecuencias bajas donde f <<< fL, (es decir fL/f >>> 1) entonces la expresión anterior se reduce a:
(2)
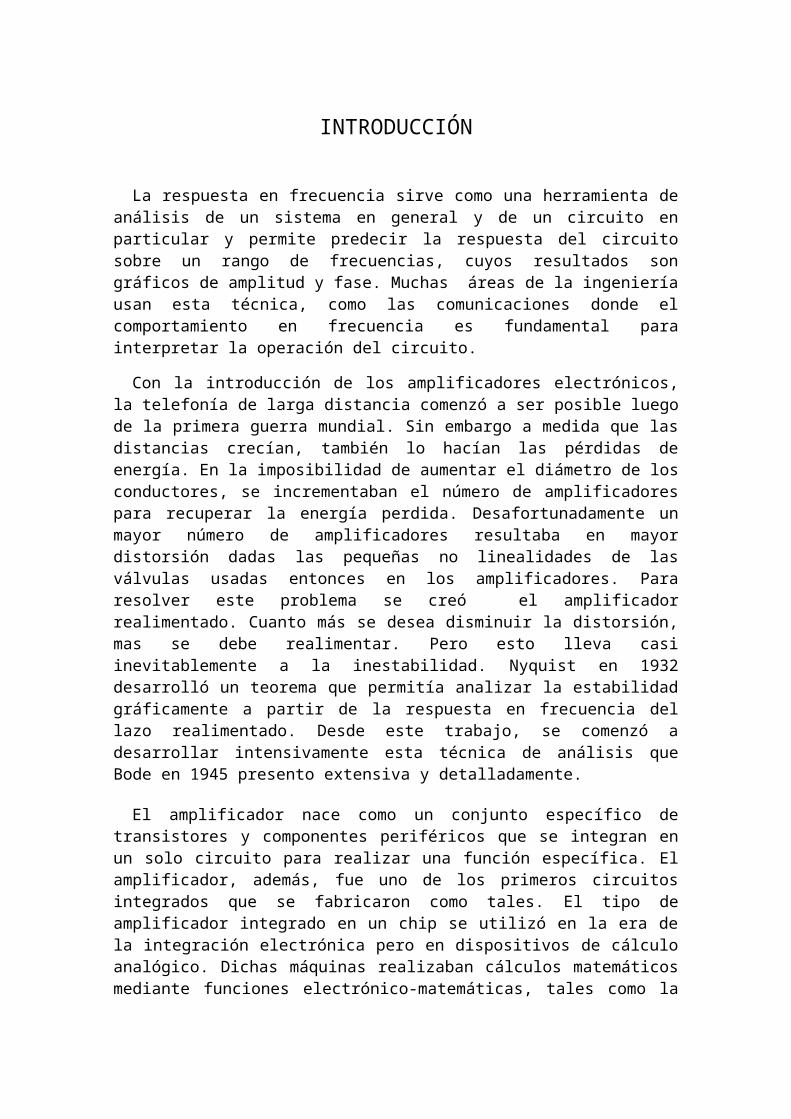
Como se puede observar, la representación en escala logarítmica resulta muy útil para dibujar gráficamente expresiones en dB. En la gráfica de la figura anexa se muestra la respuesta frecuencia del circuito y su representación en términos de dos segmentos que son las asíntotas de la anterior respuesta frecuencial La primera asíntota indicaría el comportamiento del circuito para ƒ<ƒL expresado a través de la ecuación (2). La segunda asíntota se obtiene para ƒ>ƒL resultando un valor de Av=0 dB. La intersección de ambas líneas se

produce para ƒ=ƒL que corresponde con el punto -3dB de la respuesta frecuencial. La representación gráfica en términos de líneas asintóticas y puntos asociados se denomina diagrama de Bode. A partir de este ejemplo sepuede comprobar fácilmente que un cambio de frecuencia por un factor de 2, equivalente a una octava, corresponde a un cambio de 6 dB. De la misma manera, un cambio de frecuencia por una factor de 10, equivalente a una década, corresponde a un cambio de 20dB.
Diagrama de Bode
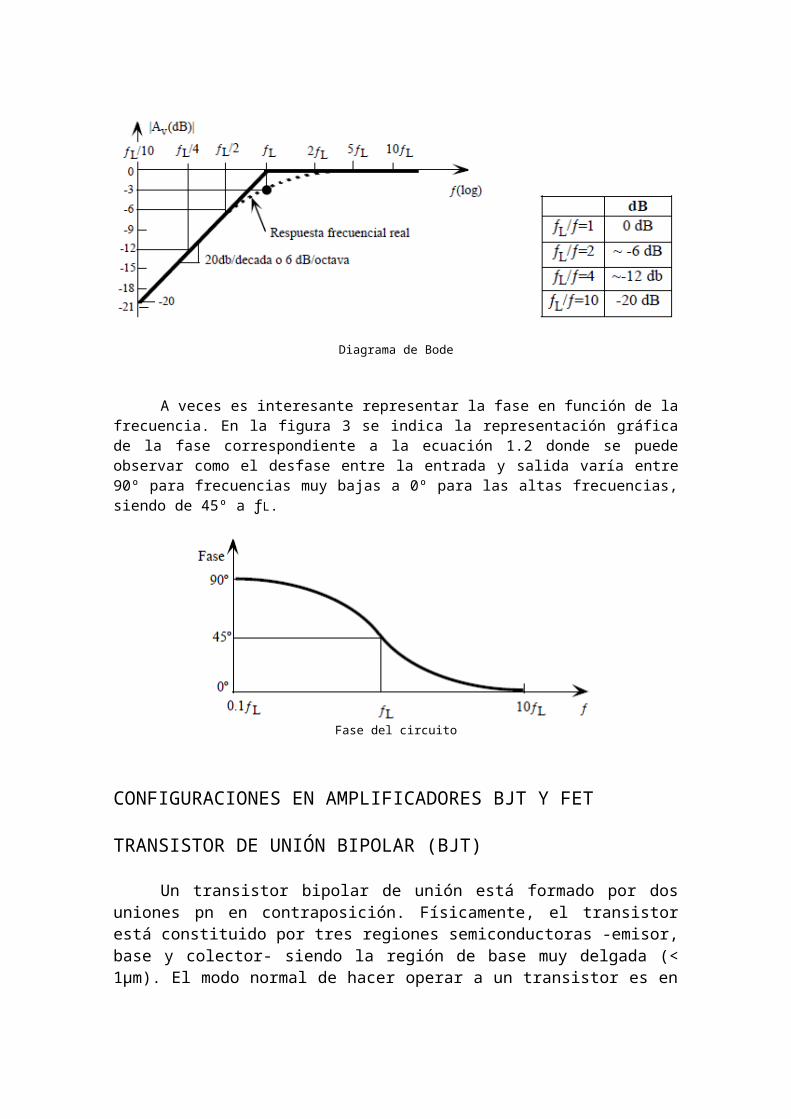
A veces es interesante representar la fase en función de la frecuencia. En la figura 3 se indica la representación gráfica de la fase correspondiente a la ecuación 1.2 donde se puede observar como el desfase entre la entrada y salida varía entre 90º para frecuencias muy bajas a 0º para las altas frecuencias, siendo de 45º a ƒL.
Fase del circuito
CONFIGURACIONES EN AMPLIFICADORES BJT Y FET
TRANSISTOR DE UNIÓN BIPOLAR (BJT)
Un transistor bipolar de unión está formado por dos uniones pn en contraposición. Físicamente, el transistor está constituido por tres regiones semiconductoras -emisor, base y colector- siendo la región de base muy

delgada (< 1μm). El modo normal de hacer operar a un transistor es en la zona directa. En esta zona, los sentidos de las corrientes y tensiones en los terminales del transistor se muestran en la figura 1.a para un transistor NPN y a un PNP. En ambos casos se verifica que:
(1)
Ebers y Moll desarrollaron un modelo que relacionaba las corrientes con las tensiones en los terminales del transistor. Este modelo, conocido como modelo de Ebers-Moll, establece las siguientes ecuaciones generales que,
Para un transistor NPN, son:
donde IES y ICS representan las corrientes de saturación para las uniones emisor y colector, respectivamente, αF el factor de defecto y αR la fracción de inyección de portadores minoritarios. En un transistor bipolar PNP, las ecuaciones de Ebers-Moll son:
Para un transistor ideal, los anteriores cuatro parámetros están relacionados mediante el teorema de reciprocidad,
Valores típicos de estos parámetros son: αF=0.99, αR=0.66, IES=10-15A y ICS=10-15ª

Zonas de operación de un transistor en la región directa
Principales modos de operación de un transistor bipolar.
La selección del punto de trabajo Q de un transistor se realiza a través de diferentes circuitos de polarización que fijen sus tensiones y corrientes. En cuadro siguiente, se incluye con los circuitos de polarización mas típicos basados en resistencias y fuentes de alimentación; además, se indican las ecuaciones que permiten obtener el punto de trabajo de los transistores. Estos circuitos presentan diferencias en algunos casos importantes.
Por ejemplo, el circuito de la figura,
a) Circuito de polarizacion; b) Representacion grafica del punto de trabajo Q.
es poco recomendable por carecer de estabilidad; bajo ciertas condiciones se puede producir deriva térmica que autodestruye el transistor. La polarización de corriente de base en el cuadro anexo es mucho más estable aunque el que más se utiliza con componentes discretos es el circuito de auto polarización. La

polarización de colector-base asegura que el transistor nunca entra en saturación al mantener su tensión colector-base positiva
Algunos circuitos de polarización típicos con transistores bipolares
Amplificador en modo común
Circuito amplificador de tensión con BJT en Emisor Común
Para obtener el circuito equivalente de alterna, se cortocircuitan las fuentes de tensión de continua y los condensadores. En el circuito resultante, se sustituyen el transistor por su modelo en parámetros híbridos.
Circuito equivalente en AC
Amplificador en Emisor Común con resistencia de emisor.
Amplificador en emisor común con la resistencia de emisor sin desacoplar, es decir, sin colocar el condensador C3 en paralelo con RE. De esta forma se comprueba cómo esta resistencia aparece en el circuito de pequeña señal haciendo que la ganancia del amplificador disminuya, lo que

justificaría la conveniencia de colocar el condensador C3. Se obtiene el circuito equivalente en parámetros híbridos para el circuito.
Amplificador en emisor común con resistencia de emisor
Circuito equivalente en AC
Con lo que, sustituyendo el transistor por su modelo simplificado el circuito que nos queda es el de la figura
Circuito de pequeña señal para amplificador en E-C con RE sin desacoplar

Amplificador en base común
Circuito amplificador con BJT en Base Común
Se cortocircuitan las fuentes de tensión de continua y los condensadores. En el circuito resultante, se sustituye el transistor por su modelo en parámetros híbridos
Circuito equivalente en AC
Circuito equivalente de pequeña señal con el modelo simplificado

Amplificador en colector común
Circuito amplificador con BJT en Colector Común
Circuito equivalente en AC
Circuito equivalente de pequeña señal con el modelo simplificado

En la siguiente tabla se ilustra un resumen de los valores calculados para las distintas configuraciones
TRANSISTOR DE EFECTO DE CAMPO (FET)
Los transistores de efecto de campo o FET (Field Electric Transistor) son particularmente interesantes en circuitos integrados y pueden ser de dos tipos: transistor de efecto de campo de unión o JFET y transistor de efecto de campo metal-oxido semiconductor (MOSFET). Son dispositivos controlados por tensión con una alta impedancia de entrada (1012Ω). Ambos dispositivos se utilizan en circuitos digitales y analógicos como amplificador o como conmutador. Sus características eléctricas son similares aunque su tecnología y estructura física son totalmente diferentes.
Ventajas del FET:
1) Son dispositivos controlados por tensión con una impedancia de entrada muy elevada (107 a 1012Ω).2) Los FET generan un nivel de ruido menor que los BJT.3) Los FET son más estables con la temperatura que los BJT.4) Los FET son más fáciles de fabricar que los BJT pues precisan menos pasos y permiten integrar más dispositivos en un C1.5) Los FET se comportan como resistencias controlados por tensión para valores pequeños de tensión drenaje-fuente.6) La alta impedancia de entrada de los FET les permite retener carga el tiempo suficiente para permitir su utilización como elementos de almacenamiento.7) Los FET de potencia pueden disipar una potencia mayor y conmutar corrientes grandes.

Limitaciones en el uso de los FET
1) Los FET presentan una respuesta en frecuencia pobre debido a la alta capacidad de entrada.2) Los FET presentan una linealidad muy pobre, y en general son menos lineales que los BJT.3) Los FET se pueden dañar debido a la electricidad estática.
Polarización de los FET
. Se utiliza una fuente de tensión externa para generar una VGS<0, y auto polarización , la caída de tensión en la resistencia RS debida a ID permite generar una VGS<0.
Circuito de polarizacion simple de un NJFET. a) Diagrama circuital. b) Ecuaciones analiticas.Representacion grafica del punto de trabajo.

CONCLUSIÓN
La ganancia de un amplificador es en general, un número complejo que depende de la frecuencia. La representación gráfica del módulo de la ganancia {A(w)}, es lo que se denomina respuesta en frecuencia del amplificador.
Gracias a los amplificadores podemos aumentar el nivel de las señales eléctricas que captan los sensores (resistencias dependientes, micrófonos, antenas, entre otros.) para después aplicarlas con suficiente energía a los dispositivos que las trasforman en algo útil. En los amplificadores, gracias a los transistores, se consigue elevar la intensidad de los sonidos y de las señales en general. El amplificador posee una entrada por donde se introduce la señaldebil y otra por donde se alimenta con corriente continua. La señal de salida se ve aumentada gracias a la aportación de esta alimentación, siguiendo las mismas variaciones que la de entrada.
Cuando un amplificador realiza la función de elevar la señal que ha sido aplicada a su entrada, se dice que ha producido una determinada ganancia. Se puede decir que la ganancia de un amplificador es la relación que existe entre el valor de la señal obtenida a la salida y el de la entrada. Dependiendo de la magnitud eléctrica que se esté tratando, se pueden observar tres tipos de ganancias,
Ganancia de tensión: que se obtiene midiendo el valor de la tensión de entrada y el de salida y realizando su cociente.

Ganancia de corriente: se obtiene midiendo el valor de la intensidad de salida y el de entrada, efectuando su cociente
Ganancia de potencia: se obtiene al dividir la potencia obtenida en la salida entre la potencia entregada a la entrada. Se puede comprobar con facilidad que, al realizar esta operación, el resultado que se obtiene coincide con el producto de las ganancias de tensión y corriente,
No todos los amplificadores son iguales; existen diferencias entre unos y otros, dependiendo de la magnitud de la señal que se va a amplificar, configuración, clase, acopiamiento y aplicaciones. En la siguiente tabla se hace una clasificación de los mismos:
Dependiendo de la señal: existen muchas aplicaciones donde el uso de una sola etapa amplificadora no es suficiente para elevar la señal de entrada al nivel deseado. Por esta razón, se emplean varias etapas amplificadoras acopladas adecuadamente, con el fin de imprimir en cada una de ellas el nivel de amplificación adecuado y, así, conseguir una señal de salida sin distorsión y con el máximo rendimiento por parte del conjunto del amplificador

Así, por ejemplo, la señal de audio proporcionada por un micrófono o la señal recogida en la antena de un receptor de radio posee un nivel que en la mayoría de las ocasiones no alcanza unos pocos milivoltios o incluso microvoltios. En estos casos se hace necesario por lo menos de dos, tres o más etapas amplificadoras. Los amplificadores de pequeña señal se utilizan en etapas previas y poseen una ganancia muy grande de tensión. Este tipo de amplificadores poseen una respuesta lineal, es decir, debe ser fiel y no distorsionar las señales. Un amplificador de valencia maneja señales más fuertes y se emplea en las etapas finales. En este amplificador la zona de trabajo es del todo lineal.
Por su configuración:
Por su clase:
Esta clasificación es debida a que no todos los amplificadores presentan todo el conjunto del ciclo de señal de entrada en la salida.
Clase A:

En la figura se muestra el aspecto de las señales de entrada y salida de un amplificador de clase A.
La señal que aparece en la salida no está distorsionada con respecto a la de entrada.
Clase B:
La señal que aparece en la salida está recortada, de tal forma que únicamente parecen los semiciclos positivos, tal como se puede apreciar en los scilogramas de la siguiente figura,
Clase C:en este caso, la corriente que aparece como señal de salida fluye menos de un semíciclo, tal como se aprecia en la figura siguiente,
Clase AB:
La señal que aparece en la salida es una combinación de la clase A y B, es decir, aparece una pequeña distorsión en los picos de la señal de salida, según la figura siguiente,

Por la frecuencia de la señal:
Como las señales que se quieren amplificar son alternativas, es necesario diseñar los circuitos amplificadores teniendo en cuenta el valor de la frecuencia de las mismas. Los amplificadores de corriente continua trabajan con señales no alternativas y, por lo tanto, poseen una frecuencia cero.
Los de audiofrecuencia o de baja frecuencia trabajan con frecuencias audibles en un margen de 20 a 20 KHz. Los amplificadores de videofrecuencia se utilizan para señales en un margen de frecuencias de entre 20 Hz y 15 MHz.
Los amplificadores radiofrecuencia o de alta frecuencia, se utilizan en sistemas de transmisión de señales de radio y manejan frecuencias del orden de 200 KHz a 300 MHz. Los de VHF y UHF trabajan en frecuencias de cientos o miles de MHz y se utilizan para la transmisión de señales de audio y televisión.
5.3
Técnica del Polo Dominante
El bloque delineado con magenta es la etapa de ganancia clase A. El espejo superior derecho Q12/Q13 carga esta etapa con una corriente constante, desde el colector de Q13, que es prácticamente independiente de la tensión de salida. La etapa consiste en dos transistores NPN en configuración Darlington y utiliza la salida del espejo de corriente como carga activa de alta impedancia para obtener una elevada ganancia de tensión. El condensador de 30 pF ofrece una realimentación negativa selectiva en frecuencia a la etapa clase A como una forma

de compensación en frecuencia para estabilizar el amplificador en configuraciones con relimentación. Esta técnica se llama compensación Miller y funciona de manera similar a un circuito integrador con amplificador operacional. También se la conoce como "compensación por polo dominante" porque introduce un polo dominante (uno que enmascara los efectos de otros polos) en la respuesta en frecuencia a lazo abierto. Este polo puede ser tan bajo como 10 Hz en un amplificador 741 e introduce una atenuación de -3 dB a esa frecuencia. Esta compensación interna se usa para garantizar la estabilidad incondicional del amplificador en configuraciones con realimantación negativa, en aquellos casos en que el lazo de realimentación no es reactivo y la ganancia de lazo cerrado es igual o mayor a uno. De esta manera se simplifica el uso del amplificador operacional ya que no se requiere compensación externa para garantizar la estabilidad cuando la ganancia sea unitaria; los amplificadores sin red de compensación interna pueden necesitar compensación externa o ganancias de lazo significativamente mayores que uno.
5.4
Respuesta en Frecuencia del BJT y el modelo de alta frecuencia
Hasta el momento se ha supuesto que el transistor responde de manera instantánea, es decir no se ha trabajado en los modelos con elementos que generen una dependencia del tiempo o de frecuencia. Sin embargo los transistores reales exhiben fenómenos de almacenamiento de carga que limitan la velocidad y la frecuencia de operación, como se vio en la unión pn. A continuación se hablará de estas capacitancias que modelaran ese comportamiento.
Capacitancias internas del BJT
Capacitancia de difusión de pequeña señal Cde, esta es debida a los portadores minoritarios de la base que generan una carga igual a
Qn=W 2
2 Dn
ic=τ F ic
Donde
τ F=W 2
2 Dn
τ F Se le conoce como tiempo de transito de base directo y es el tiempo que demora un electrón en cruzar la base, este valor esta en el intervalo de 10 a 100ps
Cde=d Qn
d v BE
=τ F
d iC
d vBE
=τ F gm=τF
I C
V T
Capacitancia de unión base-emisor C je, ésta es la capacitancia de la capa de agotamiento y del estudio del diodo podemos expresar

C je=C je0
(1−V BE
V Oe)
m
Donde C je0 es el valor de C je a voltaje 0, V Oe es el voltaje integrado de unión base-emisor = 0.9V y m = 0.5 aunque es más utilizada pues es más cercano al comportamiento real
C je=2C je 0
Capacitancia de unión colector –base Cμ
Esto sucede al tener la polarización inversa en esta juntura se genera una región de agotamiento que almacena carga esta viene dada por la ecuación
Cμ=Cμ0
(1+V CB
V OC)
m
Donde Cμ0 es el valor de Cμ a voltaje 0, V OC=0.75 y m está entre 0.2 y 0.5
Con esto tenemos que entre las junturas existirán las siguientes capacitancias
Cπ=Cde+C je=¿ (Capacitancia Emisor-Base)
Cμ (Capacitancia Colector-Base)
Con estos nuevos parámetros se puede modificar el modelo de pequeña señal anteriormente visto para tener en cuenta estas capacitancias y hacer un análisis global del circuito. Este modelo se muestra en la figura 3.1
Figura 3.1
Por lo general las hojas de datos no especifican el valor de Cπ sino el comportamiento de β (h fe) en función de la frecuencia y a partir de éste encontrar los valores de estas capacitancias, para tal caso debemos estudiar el circuito de la figura 3.2

Figura 3.2
I C=( gm−sC μ )V π
V π=I b (r π‖Cπ‖Cμ )=I b
1r π
+sC π+sCμ
h fe=I c
I b
=( gm−s Cμ )V π
( 1rπ
+sCπ+sCμ)V π
Como a las frecuencias para las que este modelo es valido gm ≫ωCμ, por tanto se puede ignorar, en términos de sCμ
h fe=I c
I b
=gm rπ
1+s (Cπ+Cμ ) rπ
=β0
1+s (Cπ+Cμ ) rπ
Teniendo así el siguiente diagrama de bode, en donde ωT es la frecuencia a la cual el|h fe| cae a la unidad. Y ωβ donde se atenúa 3db del β0,
Figura 3.2
ωβ=1
(Cπ+Cμ ) r π
Para encontrar ωT debemos igualar la magnitud del h fe a la unidad.
1=| β0
1+ j ωT ( Cπ+Cμ ) r π|= β0
√1+ (ωT (Cπ+Cμ ) r π )2

ωT2=
β02−1
((Cπ +Cμ ) rπ )2≈
β02
((Cπ +Cμ ) rπ )2
ωT ≈β0
(Cπ +Cμ ) rπ
=β0 ωβ=gm
(Cπ+C μ )
f T=gm
2 π (Cπ +Cμ )
f T Si es un valor que dan las hojas de datos de allí podemos encontrar Cπ+Cμ, además es bueno aclarar que el modelo de la figura 3.1 opera bastante bien para frecuencias menores a 0.2f T.
Respuesta en frecuencia del amplificador emisor común
Figura 3.3
En la figura 3.4 se muestra las 3 bandas en las cuales se puede dividir la respuesta en frecuencia de un amplificador. Se puede ver que en la banda baja, hay disminución de la ganancia debido a los capacitores CC 1, CC 2 y CE, esto a causa de que a bajas frecuencias los capacitores dejan de comportarse como un cortocircuito y generan atenuación, en la siguiente banda (la banda media) los capacitores antes mencionados ya no tienen un efecto significativo y en la última banda las capacitancias internas del BJT el Cπ y Cμ comienzan a ser significativas y ya no son circuitos abiertos por lo tanto generan atenuación.

Figura 3.4
Del diagrama se ve que el intervalo de operación del amplificador es la banda media a este intervalo se le conoce como ancho de banda
BW=f H −f L
En estas frecuencias la ganancia AMo ganancia de banda media se ha reducido 3dB en donde:
AM=v0
v señal
=−RB‖rπ
(RB‖rπ )+R señ
gm (r0‖Rc‖RL )
En los amplificadores el ancho de banda no es constante, lo que es constante es la relación ganancia con ancho de banda
GB=|AM|BW
Respuesta en alta frecuencia
Para el análisis en alta frecuencia los capacitores CC 1, CC 2 y CE se comportan como corto circuitos entonces obtenemos el modelo que muestra la figura 3.5.
Figura 3.5
Se pueden hacer operaciones circuítales y simplificar el circuito al mostrado en la figura 3.6

Figura 3.6
V 'sig=V sig
RB
RB+R sig
rπ
r π+rx+(R sig‖RB )
R'sig=r π‖[ rx+(R sig‖RB )]
R'L=(ro‖RC‖RL )
Del circuito se puede observar que vo=(−gmV π+ I μ ) R'L . Para hacer otra reducción se
puede suponer que para las frecuencias cercanas a f H , I μ es muy pequeña en relación a gm V π por lo tanto
vo=−gm R'L V π
I μ=V π−vo
ZCμ
=sCμ [V π−(−gm R 'L V π ) ]=sCμ (1+gm R'
L )V π
Siendo esto así podemos remplazar este capacitor por otro que vaya entreV π y tierra y genere la misma corriente como se muestra en la figura 3.7.
ZC eq=
V π
I μ
=V π
sC μ (1+gm R 'L)V π
ZC eq= 1
sC eq
→ Ceq=1
s ZCeq
= 1s
sC μ (1+gm R 'L)
C eq=C μ (1+gm R 'L)

Figura 3.7
C ¿=Cπ +Cμ (1+gm R'L )
vO=−gm V π R 'L=−gm R'
L(1
sC ¿
1sC¿
+R 'sig )V '
sig
vO=−gm R'L ( 1
1+s ( R'sig C ¿) )V '
sig
vO
V sig
=−RB
RB+ Rsig
r π gm R'L
r π+rx+(R sig‖RB ) ( 1
1+s ( R'sig C ¿) )
vO
V sig
=−( A M
1+s ( R'sig C ¿) )
ωH= 1
R'sig C ¿
f H= 1
2 π (R 'sig C ¿)
5.5 Efecto de las capacitancias parásitas internas de los transistores
En los circuitos eléctricos, la capacitancia parásita, capacitancia parásita o, en su caso, la libre capacidad, es una capacitancia inevitable y por lo general no deseado que existe entre las partes de un componente electrónico o circuito simplemente por su proximidad entre sí. Todos los elementos de circuito reales, tales como inductores, diodos, transistores y tienen capacidad interna, lo que puede causar su comportamiento para apartarse de la de los elementos de circuito "ideales". Además, siempre hay capacitancia no-cero entre los dos conductores, lo que puede ser importante a frecuencias más altas con conductores muy próximas entre sí, tales como cables o trazas de placas de circuitos impresos.
Descripción
Cuando dos conductores a diferentes potenciales están cerca uno del otro, se ven afectados por el campo eléctrico de cada uno y tienda de enfrente cargas eléctricas como un condensador. Cambio de la V de potencial entre los conductores requiere una corriente i dentro o fuera de los conductores para cargar o descargar ellos.
Por ejemplo, un inductor a menudo actúa como si se incluye un condensador en paralelo, debido a sus devanados estrechamente espaciados. Cuando existe una diferencia de potencial a través de la bobina, cables situadas adyacentes entre sí se encuentran en diferentes potenciales. Actúan como las placas de un

condensador, y cobran tienda. Cualquier cambio en el voltaje en la bobina necesita corriente adicional para cargar y descargar estos pequeños "condensadores. Cuando el voltaje cambia sólo lentamente, como en los circuitos de baja frecuencia, la corriente adicional es generalmente insignificante, pero cuando la tensión cambia rápidamente la corriente adicional es más grande y puede afectar el funcionamiento del circuito.
Bobinas para las altas frecuencias son a menudo la cesta de la herida para minimizar la capacitancia parásita.
Efectos
A bajas frecuencias, la capacitancia parásita por lo general puede ser ignorada, pero en circuitos de alta frecuencia que puede ser un problema importante. En los circuitos de amplificador con una respuesta de frecuencia extendida, la capacitancia parásita entre la salida y la entrada puede actuar como un camino de realimentación, haciendo que el circuito oscile a alta frecuencia. Estas oscilaciones no deseadas se llaman oscilaciones parásitas.
La capacitancia del circuito de carga conectado a la salida de los amplificadores operacionales puede reducir su ancho de banda. Los circuitos de alta frecuencia requieren técnicas especiales de diseño, tales como cuidado de separación de cables y componentes, anillos de protección, planos de tierra, planos de energía, protegiendo entre la entrada y la salida, la terminación de las líneas y líneas de cinta para minimizar los efectos de la capacitancia no deseado.
La capacitancia parásita entre la base y el colector de los transistores y otros dispositivos activos es el principal factor que limita su rendimiento de alta frecuencia. Se añadió la rejilla de pantalla a los tubos de vacío en la década de 1930 para reducir la capacitancia parásita entre la rejilla de control y la placa, y dio lugar a un gran aumento de la frecuencia de funcionamiento.
En los cables estrechamente espaciados y buses de ordenador, acoplamiento capacitivo parásito puede causar diafonía, lo que significa que la señal de uno sangra circuito a otro, causando la interferencia y un funcionamiento poco fiable.
Programas de automatización de diseño electrónico informáticos, que se utilizan para el diseño de circuitos impresos comerciales, pueden calcular la capacitancia parásita y otros efectos parásitos de ambos componentes y trazas de placas de circuitos, e incluirlos en las simulaciones del funcionamiento del circuito. Esto se denomina extracción de parásitos.
5.7 RESPUESTA FRECUENCIAL EN AMPLIFICADORES REALIMENTADOS
LA RESPUESTA FRECUENCIAL DE AMPLIFICADORES REALIMENTADOS
Ancho de banda y estabilidad

El efecto que produce la realimentación depende de la función de
Transferencia A*β. Esta función de transferencia incluye, en general, la presencia de polos y Ceros.
En la práctica los ceros suelen encontrarse a frecuencias muy elevadas
Comparadas con las de los polos. Por lo tanto, y para simplificar, se realiza el estudio ignorando la existencia de los ceros.
Si se utiliza una red de realimentación independiente de la frecuencia,
Solamente hay que tener en cuenta los polos del amplificador básico.
Respuesta frecuencial del amplificador realimentado .
En general el amplificador realimentado se diseña para que opere en determinada banda de paso (BW) presentando una respuesta de frecuencia plana (sin picos) o que el pico sea de una magnitud prefijada. Además se debe garantizar que el amplificador realimentado sea estable para lo cual normalmente hay que compensarlo.
Una de las características del amplificador realimentado es el aumento de ancho de banda, para demostrar esto, si un amplificador básico tiene una frecuencia de corte superior f entonces su ganancia se puede expresar:
Siendo Ao , la ganancia a frecuencias medias y f la frecuencia de la señal de entrada, se obtiene :

Siendo Aof, la ganancia del amplificador realimentado y Fhf su frecuencia de corte superior, se obtiene:
Se comprueba que la ganancia del amplificador realimentado a frecuencias medias Aof es igual a la ganancia del amplificador básico a frecuencias medias dividida por 1 + βao.
Asimismo, la frecuencia de corte del amplificador realimentado ƒHf, es igual a la frecuencia de corte del amplificador básico (ƒH) multiplicado 1+βo. De la misma manera, un amplificador realimentado, cuyo amplificador básico tenga una frecuencia de corte inferior ƒL, tiene una frecuencia de corte inferior ƒLf definida por:
En el caso de verificar que ƒH>>ƒL, y por consiguiente ƒHf>>>>ƒLf, el producto ganancia ancho de banda no se ha modificado por la presencia de la realimentación es decir,
Sin realimentación, el ancho de banda es ƒH-ƒL y con ella es ƒHf-ƒLf; se puede observar claramente que ƒHf-ƒLf > ƒH-ƒL, luego se aumenta el ancho de banda. Sin embargo, este aumento es proporcional a la disminución de la ganancia del amplificador realimentado (Aof).


5.8
TRANSISTOR BJT COMO CONMUTADOR
Aplicar los transistores no se limita únicamente a la amplificación de señales. A través de un diseño adecuado pueden utilizarse como un interruptor para computadora y para aplicaciones de control. Puede emplearse como un inversor en los circuitos lógicos de las computadoras.
Observe la figura 4.24 donde el voltaje de salida Vc es opuesto al que se aplicó sobre la base o a la terminal de entrada. También obsérvese la ausencia de una fuente de dc conectada al circuito de la base. La única fuente de dc está conectada al colector o lado de la salida, y para las aplicaciones de computadoras normalmente es igual a la magnitud del nivel "alto" de la señal aplicada, en este caso 5 V.
Figura 4.24. Transistor inversor.
El diseño ideal para el proceso de inversión requiere que el punto de operación conmute de corte a la saturación, pero a lo largo de la recta de carga. Para estos propósitos se asumirá que Ic = Iceo = 0 mA cuando IB = 0 µA (una excelente aproximación de acuerdo con las mejoras de las técnicas de fabricación).
Cuando Vi = 5 V, el transistor se encontrará "encendido" y el diseño debe asegurar que la red está saturada totalmente por un nivel de IB mayor asociado con la curva IB, que aparece cerca del nivel de saturación. El nivel de saturación para la corriente del colector y para el circuito está definido por: ICsat = Vcc/ Rc
www.itlp.edu.mx\publica\tutoriales\electronica\index.html
Comportamiento del bipolar en conmutación

A continuación, estudiaremos brevemente el comportamiento en conmutación del transistor bipolar. Nuestro objetivo principal es relacionar el comportamiento en conmutación del inversor RTL con la física interna del bipolar. Idealmente, nos gustaría que el bipolar conmutara instantáneamente de saturación a corte y viceversa. Sin embargo, las capacidades de transición de las uniones y el almacenamiento de portadores minoritarios en la base, ralentizan las transiciones.
Consideremos el inversor RTL de la Figura 4.46. El transistor es un 2N2222, un viejo favorito de los diseñadores de circuitos electrónicos. Muchas de las versiones educacionales de SPICE incluyen el modelo completo del 2N2222. Este modelo contiene parámetros que tienen en cuenta las capacidades parásitas del dispositivo y los efectos del almacenamiento de carga. No nos extenderemos en esto; simplemente queremos mostrar los efectos de la conmutación en un circuito típico.
Parte de la corriente de base fluye a través de la capacidad de la unión del colector, y sale del terminal del colector (lo contrario del sentido normal de la corriente de colector para un transistor npn en la región activa). Esta corriente hace que aumente la tensión de salida. Así, la tensión de salida es, de hecho, ligeramente mayor que la tensión de alimentación de 3 V. Poco después del comienzo del pulso de entrada, la tensión de la base se hace lo suficientemente alta como para polarizar en directa la unión del emisor. Entonces, los electrones cruzan desde el emisor hacia a la base. Estos electrones se difunden hacia la unión del colector. Así, empieza a fluir corriente hacia el colector y la tensión del colector comienza a caer.
Aproximadamente en t%190 ns, el transistor entra en la región de saturación. Entonces, la tensión de colector se hace (aproximadamente) constante, con un valor de unas pocas décimas de voltio.
La tensión de entrada vin vuelve a cero en t%300 ns. Sin embargo, la tensión de salida permanece baja hasta aproximadamente t%520 ns, debido al exceso de portadores minoritarios (electrones) almacenados en la región de la base vin vo4

Cuando el transistor es llevado a saturación, ambas uniones están polarizadas en directa por lo que se va acumulando una alta concentración de electrones en la base. Hasta que estos electrones no han sido quitados de la base, sigue fluyendo corriente directa a través de las uniones. Observe que la corriente de base cambia de dirección al final del pulso de entrada. Esto se debe a la carga almacenada que sale del terminal de la base.
Aproximadamente en t%520 ns, la mayor parte del exceso de carga contenido en la base ha sido extraído y la corriente de colector comienza a caer, haciendo que crezca la tensión de salida. Sin embargo, la tensión de salida crece paulatinamente a causa de las capacidades parásitas de la unión. Al final, el transistor vuelve al estado de corte.
Como era de esperar, el circuito actúa como inversor lógico. Cuando la entrada es baja, la salida, con el tiempo, se hace alta. De igual manera, cuando la entrada es alta, la salida, al final, se hace baja. A causa de los efectos del almacenamiento de cargas, los cambios en la salida no tienen lugar inmediatamente al cambiar la entrada. Desde luego, en muchas aplicaciones se desea que los retardos de la conmutación sean lo más breves que sea posible.
Definiciones del intervalo de conmutación
A menudo, las hojas de datos de los transistores ofrecen especificaciones de los intervalos de tiempo de conmutación para circuitos de prueba similares al inversor RTL.
Definimos el inicio de una transición lógica como el punto en el que ya ha ocurrido el 10% del cambio de tensión. Por ejemplo, el inicio del flanco de subida del impulso de entrada de 3 voltios, es el punto en el que el impulso de entrada alcanza los 0,3 V. De igual manera, el inicio del flanco de bajada del impulso de salida es el punto en el que vo cae a 2,7 V. Estos puntos de inicio se indican en la Figura 4.50.

De igual forma, definimos el final de una transición lógica como el punto en el que ya ha tenido lugar el 90% del cambio de tensión. Las hojas de datos de los transistores utilizados en aplicaciones de conmutación, especifican a menudo los siguientes intervalos de conmutación:
td es el tiempo de retardo, medido desde el comienzo del flanco de subida de la entrada hasta el comienzo del flanco de bajada de la salida. Véase la Figura 4.50.
tr es el tiempo de subida, medido desde el punto de inicio hasta el punto final del flanco de subida del impulso de salida. Por ejemplo, en la Figura 4.50, tr es el intervalo entre el punto de 2,7 V y el punto de 0,3 V del flanco de subida del impulso de salida.
ts es el tiempo de almacenamiento, medido desde el punto de inicio del flanco de bajada del impulso de entrada hasta el punto inicial del flanco posterior del impulso de salida.
tf es el tiempo de caída, medido entre los puntos inicial y final del flanco de bajada del impulso de salida.
Si examinamos la hoja de datos del fabricante para el 2N2222 o el 2N2222A, que es muy similar, encontraremos que se ofrecen valores típicos de td, tr, ts y tf para determinadas condiciones de prueba. Los circuitos con los que se han hecho pruebas se suelen facilitar en las hojas de datos.
VELOCIDAD DE RESPUESTA DE UN AMPLIFICADOR
Slew rate
En electrónica el Slew Rate es un efecto no lineal en los amplificadores . Representa la incapacidad de un amplificador para seguir variaciones rápidas de la señal de entrada. También se le define como la velocidad de cambio del voltaje de salida con respecto a las variaciones en el voltaje de entrada.
El slew rate de un amplificador se define como el rango máximo de cambio de la tensión de salida para todas las señales de entrada posibles, por lo que limita la velocidad de funcionamiento, es decir la frecuencia máxima a la que puede funcionar el amplificador para un nivel dado de señal de salida.

El Slew Rate se expresa típicamente en unidades de V/μs.
Para un amplificador operacional 741 la máxima velocidad de respuesta es 0,5 V/μs. , y para el OP-07 es de 0,3V/μs, lo que quiere decir que el voltaje de salida cambiará a
una razón máxima de 0,5 V en 1µs y 0,3 V en 1µs respectivamente.
La razón de la limitación del SR es el condensador de 30 pF que se usa para compensarlo internamente en frecuencia, la corriente máxima que el Amp Op 741 le puede suministrar al condensador y la relación es la siguiente:
SR=Imax/C por lo que SR=15µA/30pf SR=0,5V/μs
LIMITACION DE LA VELOCIDAD DE RESPUESTA (SLEW RATE)
/strong>
En un Amplificador Operacional real la velocidad de cambio de la salida (SR en V / MS) no podrá nunca exceder un máximo llamado "rapidez de respuesta"
Análisis: En t=0, v+= Vin= 0.1 Vvout = 0 y v-= 0 V Salida del OPAMP tratará de saturarse positivamente a una velocidad máxima dada por la slew rate (0.5V/s).
La salida crecerá hasta que el terminal inversor alcance el voltaje de la entrada no inversora
BIBLIOGRAFÍA
- Martin B., Ricardo A., “GUÍA PRÁCTICA DE ELECTRICIDAD Y ELECTRÓNICA”, Editorial Cultural, S.A. Madrid. España. II Edición. 2002.
- San Miguel, Pablo Alcalde. “ELECTRÓNICA GENERAL” (Equipos electrónicos de consumo). Thompson Editores Spain-PARANINFO. Madrid. España. 1ª edición, 2ª reimpresión. 2003.
- Ruiz Robredo, Gustavo A. ·”ELECTRÓNICA BÁSICA PARA INGENIEROS”. Editor: el autor. Madrid. España. 1ª Edición. 2001.

- Franco, Sergio. “DISEÑO CON AMPLIFICADORES OPERACIONALES Y CIRCUITOS INTEGRADOS ANALÓGICOS”. McGraw Hill Interamericana de Editores, S.A. de C.V. Tercera Edición. México, 2002.