1 universidad miliart nueva granada diseÑo de un...
TRANSCRIPT

1
UNIVERSIDAD MILITAR
NUEVA GRANADA
DISEÑO DE UN SISTEMA MECATRÓNICO PARA ELSEGUIMIENTO SOLAR
BASADO EN CONTROL ADAPTATIVO
JOSE FERNEY MEDINA SERRATO
Trabajo de grado para optar al título de
INGENIERO EN MECATRÓNICA
Director
Ing. Mauricio Mauledoux Ph.D
UNIVERSIDAD MILITAR NUEVA GRANADA
FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA EN MECATRÓNICA
BOGOTÁ
2015

2
LICENCIA DE LA OBRA
Usted es libre de:
Compartir - copiar, distribuir, ejecutar y comunicar públicamente la obra ohacer obras derivadas.
Bajo las condiciones siguientes:
Entendiendo que:
Renuncia Alguna de estas condiciones puede no aplicarse si se obtiene elpermiso del titular de los derechos de autor.
Dominio Público Cuando la obra o alguno de sus elementos se halle enel dominio público según la ley vigente aplicable, esta situación no quedaráafectada por la licencia.
Otros derechos Los derechos siguientes no quedan afectados por la licenciade ninguna manera:
Los derechos derivados de usos legítimos u otras limitaciones reconocidaspor la ley no se ven afectados por lo anterior.
Los derechos morales del autor.
Derechos que puedan ostentar personas sobre la propia obra o su uso,como por ejemplo derechos de imagen o de privacidad.
Aviso Al reutilizar o distribuir la obra, tiene que dejar muy en claro los términosde la licencia de esta obra. La mejor forma de hacerlo es enlazar a esta página.
www.creativecommons.org/licenses/by-nc-sa/3.0/deed.es

3
DEDICATORIA
Este trabajo esta dedicado de manera muy especial a la memoria de UbaldinaMedina a quien le basto con 4 años de compromiso y amor para dejar una huellaen mi que jamás se borrara. Te amo abuelita.

4
AGRADECIMIENTOS
Principalmente agradezco a Dios por guiarme y acompañarme en todo mo-mento a lo largo de mi carrera, especialmente en los momentos más difícilesdonde realmente sentí su presencia expresado a través de familiares, amigos,compañeros y profesores; le agradezco por permitirme acumular un sin númerode enseñanzas, anécdotas, sacri�cios, tristezas y alegrías.
A mis padres Marina Serrato y José Medina, a mi hermana Wendy Medinaquienes han sido el pilar de toda mi vida brindándome su apoyo incondicional,inculcando en mi sólidos principios y valores, realizando esfuerzos y sacri�ciosen procura de mi bienestar.
Agradezco a mis profesores por mostrarme el camino hacia el conocimiento,por los proyectos y desafíos asignados que permitieron el desarrollo constante demi proceso de formación. Agradezco especialmente a mi tutor Mauricio Maule-doux por la con�anza depositada en mí, por el apoyo brindado, por ser esa guíay modelo a seguir como persona y profesional.
A mis amigos y compañeros, por compartir con migo durante estos cinco añosde formación quienes fueron compañeros de largas horas de trabajo y dedicación,por los momentos vividos y las enseñanzas transmitidas.

Índice general
1. INTRODUCCIÓN 91.1. Motivación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2. Justi�cación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.3. Planteamiento del Problema . . . . . . . . . . . . . . . . . . . . . 101.4. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4.1. OBJETIVO GENERAL . . . . . . . . . . . . . . . . . . . 111.4.2. OBJETIVOS ESPECÍFICOS . . . . . . . . . . . . . . . . 11
1.5. Organización del documento . . . . . . . . . . . . . . . . . . . . . 11
2. REVISIÓN DE LA LITERATURA 122.1. Energía Solar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.2. Tipos de células Fotovoltaicas . . . . . . . . . . . . . . . . . . . 172.3. Seguidores Solares . . . . . . . . . . . . . . . . . . . . . . . . . . 202.4. Controladores en Seguidores Activos . . . . . . . . . . . . . . . . 28
3. SOLUCIÓN DE INGENIERÍA 323.1. Diseño Mecánico . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.2. Diseño Controlador . . . . . . . . . . . . . . . . . . . . . . . . . . 423.3. Validación Datos de Radiación Solar . . . . . . . . . . . . . . . . 54
4. RESULTADOS Y ANÁLISIS DE RESULTADOS 574.1. Diseño Mecánico . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.2. Diseño Controlador . . . . . . . . . . . . . . . . . . . . . . . . . . 604.3. Carga Aprovechada . . . . . . . . . . . . . . . . . . . . . . . . . . 63
A. Características Panel Solar 70
B. Características Acero AISI 304 72
C. Características Actuador Lineal 74
5

Índice de �guras
2.1. Espectro Electromagnético. Imagen tomada de [1] . . . . . . . . 132.2. Aprovechamiento energía solar. Imagen tomada de [1] . . . . . . 142.3. Clasi�cación de las tecnologías de aprovechamiento solar. Imagen
tomada de [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.4. Intercambio térmico de una casa con su entorno físico. Imagen
tomada de [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.5. Formas de aprovechamiento térmico . Imagen tomada de [1]. . . . 152.6. Tecnologías a Media temperatura Colector a) de tubos evacua-
dos, b) concentrador re�ector tipo Fresnel, c) concentrador decanal parabólico y d) concentrador parabólico compuesto. Ima-gen tomada de[3] . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.7. Panel solar. Imagen tomada de [4] . . . . . . . . . . . . . . . . . 182.8. Célula Monocristalino. Imagen tomada de [5] . . . . . . . . . . . 182.9. Célula Policristalino. Imagen tomada de [5] . . . . . . . . . . . . 192.10. Célula Silicio Amorfo. Imagen tomada de[6] . . . . . . . . . . . . 192.11. Comparación de e�ciencia entre células solares. Imagen tomada
de [7] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.12. Coordenadas Geográ�cas. Imagen tomada de [8] . . . . . . . . . 202.13. Coordenadas Celestes. Imagen tomada de [9] . . . . . . . . . . . 212.14. Angulo de Incidencia de radiación solar sobre un plano inclinado.
Imagen tomada de [9] . . . . . . . . . . . . . . . . . . . . . . . . 222.15. Fases de un Seguidor Pasivo. Imagen tomada de [10] . . . . . . . 232.16. Seguidor eje Azimutal. Imagen tomada de [11] . . . . . . . . . . 242.17. Seguidor eje Horizontal. Imagen tomada de [11] . . . . . . . . . 242.18. Seguidor eje Polar. Imagen tomada de [11] . . . . . . . . . . . . 252.19. Seguidor de dos ejes. Imagen tomada de [11] . . . . . . . . . . . 252.20. Seguidor de eje horizontal diseñado por Mecasolar. Imagen toma-
da de[12] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.21. Seguidor de eje polar diseñado por Mecasolar. Imagen tomada
de[13] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.22. Seguidor de eje Polar diseñado por Enersol. Imagen tomada de[14] 272.23. Seguidor de dos Ejes diseñado por Sedonasolar. Imagen tomada
de[15] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.24. Rawlemon Captador solar. Imagen tomada de [16] . . . . . . . . 28
6

ÍNDICE DE FIGURAS 7
2.25. Diagrama de bloques del seguidor solar. Imagen tomada de [17] 282.26. Disposición de helióstatos. Imagen tomada de [18] . . . . . . . . 31
3.1. Coordenada Campus Cajicá. Imagen tomada de [19] . . . . . . . 333.2. Descripción e implementación del mecanismo . . . . . . . . . . . 343.3. Análisis Preliminar Mecanismo . . . . . . . . . . . . . . . . . . . 343.4. Algoritmo de Diseño . . . . . . . . . . . . . . . . . . . . . . . . . 353.5. Boceto 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.6. Boceto 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.7. Boceto 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.8. Boceto 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.9. Prototipo Sistema Orientación sobre Eje Polar . . . . . . . . . . 373.10. Sujeción Sistema Orientación y Transmisión de Movimiento . . . 373.11. Calculo Distancia entre Paneles [19] . . . . . . . . . . . . . . . . 383.13. Prototipo Sistema de Orientación Modular . . . . . . . . . . . . 383.12. Transmisión de movimiento para el prototipo modular . . . . . . 393.14. Modelo de Circuito eléctrico equivalente de una Celda Fotovol-
taica. Imagen tomada de[20] . . . . . . . . . . . . . . . . . . . . . 403.15. Relación entre modelo mecánico y panel solar . . . . . . . . . . 423.16. Con�guración Básica de Control Adaptativo. Imagen tomada de
[21] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.17. Estructura con un modelo de referencia (MRAC). Imagen tomada
de [21] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433.18. Control Adaptativo proporcional por modelo de referencia. Ima-
gen tomada de [21] . . . . . . . . . . . . . . . . . . . . . . . . . 453.19. Angulo Real proyectado del sol en un día . . . . . . . . . . . . . 463.20. Regresión Polinomial . . . . . . . . . . . . . . . . . . . . . . . . 463.21. Control Adaptativo . . . . . . . . . . . . . . . . . . . . . . . . . 473.22. Pre estabilización del Sistema . . . . . . . . . . . . . . . . . . . . 483.23. Sistema Lineal Invariante en el tiempo . . . . . . . . . . . . . . . 493.24. Resultado SSEST . . . . . . . . . . . . . . . . . . . . . . . . . . . 513.25. Observador Reconstruido según la identi�cación por espacio de
estados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523.26. Esquema de un observador de estados. Imagen tomada de [22] . . 533.27. Observador de estados . . . . . . . . . . . . . . . . . . . . . . . . 543.28. Esquema completo Sistema . . . . . . . . . . . . . . . . . . . . . 543.29. Diagrama de cajas . . . . . . . . . . . . . . . . . . . . . . . . . . 553.30. Comparación de Datos . . . . . . . . . . . . . . . . . . . . . . . 56
4.1. Análisis de Cargas sobre el Prototipo . . . . . . . . . . . . . . . . 584.2. Tensión de von Mises . . . . . . . . . . . . . . . . . . . . . . . . 584.3. Fuerza Actuador Lineal . . . . . . . . . . . . . . . . . . . . . . . 594.4. Deformaciones unitarias . . . . . . . . . . . . . . . . . . . . . . . 594.5. Salida control adaptativo con un factor de adaptabilidad de 0.0004
60

ÍNDICE DE FIGURAS 8
4.6. Salida control adaptativo con un factor de adaptabilidad de 0.00007860
4.7. Salida control adaptativo con un factor de adaptabilidad de 0.00078 614.8. Respuesta Pre estabilizada . . . . . . . . . . . . . . . . . . . . . 614.9. Error presente en el observador de estados . . . . . . . . . . . . 624.10. Comparación en Producción de Energía durante tres días . . . . 634.11. Comparación Carga Producida . . . . . . . . . . . . . . . . . . . 63

Capítulo 1
INTRODUCCIÓN
El consumo energético mundial ha ido en incremento gradual y signi�cati-vamente durante las ultimas décadas, esta demanda es suplida en gran manerapor combustibles fósiles (petróleo, gas, carbón) a tal punto que para el año 1999suministraban alrededor del 88% de la energía consumida por el ser humano[23].Un estudio realizado por el banco mundial sugiere que en Colombia el consumoenergético aportado por los combustibles fósiles representaban el 75.5% en elaño 2011 [24], sin embargo no es un recurso inagotable y la taza de consumoes mucho mayor a la de su producción, debido a que el proceso de formaciónde los combustibles fósiles es de forma natural a través de complejos procesosbiogeoquımicos, desarrollados bajo condiciones especiales durante millones deaños.
Se estima que en el contexto mundial se emiten alrededor de 24000 millonesde toneladas de CO2 anualmente[25], generados principalmente por el consumode combustibles fósiles, aumentando la concentración de gases de efecto inver-nadero, los cuales generan frente a otros factores como la reducción de la masaforestal, el fenómeno denominado �Calentamiento Global�.
La investigación de energías alternas a los combustibles fósiles, que minimi-zan la producción de gases de efecto invernadero, se ve manifestado en el avancede novedosas tecnologías verdes. Los desarrollos están re�ejados, en la búsquedade métodos para el aumento de la e�ciencia de producción de energía eléctrica,a través de recursos renovables como los son energía eólica, energía debido abiomasa, energía hidráulica, energía debido a océanos, energía por geotermia yenergía solar.
En esta propuesta, se busca el aprovechamiento de la energía solar, pormedio del diseño de un sistema mecatrónico, que permite el seguimiento de latrayectoria solar gracias a su estructura mecánica y a su etapa de control, conel �n de incrementar la captación de energía solar sobre un arreglo de panelesfotovoltaicos.
En el trabajo de grado se implementó un control adaptable en una estructurade un grado de libertad el cual tiene la capacidad de ajustarse a cualquier cambiopresentado en la dinámica del sistema causado debido a la degradación de sus
9

CAPÍTULO 1. INTRODUCCIÓN 10
partes por los cambios en las condiciones ambientales en largos periodos detiempo, evaluando el funcionamiento del controlador, diseñado y comprobandoel aumento en e�ciencia en generación de carga energética.
1.1. Motivación
La motivación para el desarrollo de este proyecto para optar el título deIngeniero en Mecatrónica de la Universidad Militar Nueva Granada, es aportaral desarrollo de conocimiento e innovación tecnológica en energías renovables,contribuyendo a la comunidad cientí�ca colombiana, en el aprovechamiento deenergía solar.
1.2. Justi�cación
Los cambios actuales en los fenómenos climáticos presentes en Colombia tie-nen un incremento por interferencias directas causadas por el hombre como laintensi�cación del efecto invernadero, tala de árboles, indebido manejo de resi-duos a vertientes naturales produciendo sequías, inundaciones y como impactosocial aumento de migraciones, producción de enfermedades como el denguey la malaria entre otras. El estudio para el desarrollo del aprovechamiento defuentes de energía renovables (Solar, Eólica, Hidráulica) para mitigar el impactogenerado por el ser humano se ve re�ejado en el desarrollo de novedosas téc-nicas de captación y transformación de energía, entre ellos la energía solar lacual presenta un desarrollo signi�cativo sobre los captadores solares fotovoltai-cos, convirtiendo la energía entregada por el sol en energía eléctrica útil para elconsumo humano.
Este proyecto pondrá en práctica el área de conocimiento de control y diseñode sistemas mecatrónicos con el �n de generar una solución frente a la problemá-tica de hacer más e�ciente la captación de energía por medio de paneles solaresfotovoltaicos al diseñar un sistema de control que permita el seguimiento solaradaptándose a los errores presentes en el modelado , aumentando el tiempo deincidencia de radiación directa sobre los paneles fotovoltaicos, generando unamayor conversión de energía repercutiendo directamente en la disminución delporcentaje de producción de gases de efecto invernadero y en el aumento degeneración de energía a través de energías renovables.
1.3. Planteamiento del Problema
El aprovechamiento de energía solar enmarcado en la captación por mediode colectores fotovoltaicos origina un avance en la generación de fuentes de ener-gías alternas, sin embargo para que un sistema basado en paneles fotovoltaicosfuncionen de una forma óptima, es necesario que el panel permanezcan a 90°con respecto a su fuente de radiación, lo que supone no es e�ciente si está enuna estructura �ja, es por esto que existen plataformas móviles de uno o dos

CAPÍTULO 1. INTRODUCCIÓN 11
grados de libertad, para que el sistema foto voltaico realice el seguimiento sobrela trayectoria solar.
¾En cuánto mejora la captación de radiación solar sobre un arreglo de pa-neles el cual posee un sistema de control adaptativo para el seguimiento de latrayectoria solar sobre un grado de libertad frente a uno que se encuentra �jo?
1.4. Objetivos
1.4.1. OBJETIVO GENERAL
Diseñar un sistema Mecatrónico que permita el seguimiento de la trayec-toria del sol con el �n de aumentar la e�ciencia de los captadores solaresmediante un control adaptativo.
1.4.2. OBJETIVOS ESPECÍFICOS
Evaluar los datos de radiación solar obtenidos de una estación climáticade la corporación autónoma regional de Cundinamarca (CAR) ubicada enel campus de la universidad.
Diseñar un sistema de orientación mecánico, que se ajuste a las condicio-nes asociadas a la infraestructura del sitio de instalación, para seguir latrayectoria del sol en el campus.
Diseñar y simular el controlador adaptativo para generar una respuestasuave y lenta del seguimiento de la trayectoria del sol.
Diseñar un prototipo a escala para la validación de la estrategia de control.
Cuanti�car y analizar la potencia solar generada con un sistema de trac-king solar sobre una estructura de captación �ja, basado en parámetrosde e�ciencia energética.
Elaborar un artículo cientí�co para publicar los resultados obtenidos enrevistas especializadas.
1.5. Organización del documento
El proyecto en un principio presenta una revisión del estado del arte, conel �n de obtener una clasi�cación y descripción del funcionamiento de un sis-tema seguidor de trayectoria solar, sigue con el diseño del prototipo respecto alas especi�caciones planteadas, elaborando un análisis del dispositivo diseñadopor medio de herramientas asistidas por computador y termina analizando losresultados obtenidos por el prototipo.

Capítulo 2
REVISIÓN DE LALITERATURA
Introducción
La correcta elaboración de un seguidor solar supone ciertas consideraciones,para eso este capítulo pretende presentar los conceptos más trascendentales parael buen desarrollo del trabajo. Existen un sinnúmero de estudios relacionadoscon el aumento de e�ciencia en la obtención de energía solar, este capítulopresenta desarrollos que permite contextualizar el objetivo del trabajo, en estese puede encontrar diferentes arquitecturas de seguimiento y diferentes métodosde control sobre el sistema.
2.1. Energía Solar
El sol es el cuerpo central en nuestro sistema solar, está compuesto principal-mente de hidrógeno y helio, su masa constituye el 99.68% de la masa total delsistema solar [26]. La energía que procede de este cuerpo es debido a reaccionestermonucleares de fusión la cual consiste en la unión de dos núcleos atómicosa elevadas temperaturas para formar un núcleo más pesado[27], liberando grancantidad de energía, implicando la transformación de hidrógeno en helio. Laenergía producida por el sol llega a la tierra por medio de ondas electromagné-ticas a modo de radiación y se calcula que esta alrededor de 5.4x1024J/ano, noobstante el aprovechamiento de la radiación solar está restringido por la intensi-dad de radiación recibida por la tierra (según unidad de tiempo y super�cie deadmisión), los ciclos diarios y anuales ( cambios por estaciones según ubicacióngeográ�ca) y las condiciones climáticas como la cantidad de horas de incidenciasolar anual [28].Las ondas electromagnéticas emitidas por el sol son propagadas en el espa-cio sin la necesidad de un medio que las transporte, a una velocidad de c =
12

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 13
3x108ms−1en todas las direcciones[29], corresponde a una parte del llamadoespectro electromagnético.
Cada cuerpo, según sus características intrínsecas, emite un patrón de ra-diación electromagnética ( una forma de radiación característica) que puedeidenti�carse en el espectro electromagnético[30]. La energía electromagnéticarecibe variados nombres respecto a la longitud de onda portadora: microondas,ondas de radio, rayos X, infrarrojos, ultravioleta, luz visible (formada por unconjunto de frecuencias que van desde el azul hasta el rojo) como se muestra enla Figura 2.1.
Figura 2.1: Espectro Electromagnético. Imagen tomada de [1]
El aprovechamiento de la energía que produce el sol, se ve implicado hasta enprocesos ajenos a la intervención humana, y que son netamente procesos natu-rales de nuestro planeta, es decir, procesos bioquímicos como la fotosíntesis[31],y que a partir de este proceso aparece la producción de combustibles fósiles, yaque en determinadas eras de la historia de la tierra, se formaron depósitos decarbón debido a que las plantas de hace millones de años, produjeron materiaorgánica (cadenas de carbono) mediante la fotosíntesis, los restos sepultados setransformaron, con el paso de millones de años en los combustibles fósiles [32]de los cuales el ser humano se ha valido para satisfacer nuestras necesidades.
En de�nitiva se puede deducir que el sol como recurso energético provocagran cantidad de energía la cual se mani�esta en diversas formas de energíacomo los son la energía térmica, energía debido a biomasa, energía debido alpetróleo entre otras como se observa en la Figura 2.2
La tecnología actual que se utiliza para la captación de energía solar directa yconvertirla en una forma e�ciente de energía se ha desarrollado en dos direcciones(ver Figura 2.3):
Energía Solar Térmica
La tecnología de conversión térmica, absorbe la energía solar y la transformaen calor. Esta tecnología permite obtener indirectamente electricidad mediantela transformación de calor por medio de una maquina termodinámica.
La tecnología de conversión solar térmica de forma pasiva se aprovecha el

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 14
Figura 2.2: Aprovechamiento energía solar. Imagen tomada de [1]
Figura 2.3: Clasi�cación de las tecnologías de aprovechamiento solar. Imagentomada de [1]
acondicionamiento de las edi�caciones, siguiendo una serie de pautas de la nom-brada arquitectura bioclimática, en la que se sustenta en la interacción de lasedi�caciones con su entorno físico (Figura 2.4). Es decir, tiene en cuenta el climay las condiciones del entorno para ayudar a conseguir bienestar térmico interiormediante la adecuación del diseño, la geometría, la orientación y la construccióndel edi�cio adaptado a las condiciones climáticas de su entorno. [2]

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 15
Figura 2.4: Intercambio térmico de una casa con su entorno físico. Imagen to-mada de [2]
La tecnología de conversión solar térmica de forma activa, se produce pormedio de un elemento con determinadas características, denominado �colector�,con el que se lleva a cabo la conversión térmica. Se aprovecha del calor obte-nido en la radiación solar y la transmite a un �uido, de modo que se aumenteconsiderablemente su temperatura (como se observa en la Figura 2.5), lo quepermite realizar algún proceso termodinámico y según el grado de temperaturaalcanzada se clasi�ca en una conversión de baja, media o alta temperatura [33].
Figura 2.5: Formas de aprovechamiento térmico . Imagen tomada de [1].
En la Figura 2.6 se muestran las principales tecnologías de energía solar uti-lizadas para el calor en proceso a media temperatura. Principalmente son a)los tubos evacuados, b) re�ector lineal Fresnel, c) concentrador de canal para-

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 16
bólico y c) concentrador parabólico compuestos. A continuación se describenbrevemente:
Los Tubos Evacuados constan de dos tubos, uno insertado en el interior delotro de mayor diámetro, formando una cámara de aire el cual es extraídoo evacuado, para formar un vacío que evitará la transferencia de calorpor convección. Al tubo interior se le reviste con una aleación de Nitratode Aluminio principalmente, para formar una super�cie que capturará laradiación solar y convertirá los rayos solares en calor aprovechable mientrasque el tubo exterior es construido con un cristal proveniente de la fundiciónde dos elementos Boro y Silicio.
El Re�ector Lineal Fresnel, también conocido como re�ector Fresnel deconcentración, utiliza re�ectores lineales que son segmentos largos y del-gados de espejos para concentrar la luz solar en un captador �jo situadoen un punto focal común a dichos re�ectores. Estos concentradores soncapaces de concentrar la energía del sol a aproximadamente 30 veces suintensidad normal. La energía concentrada se a un �uido térmico que pue-de ser agua o bien aceite para alta temperatura.
El Concentrador Parabólico cuenta con un espejo en forma de cilindroparabólico. En el foco se coloca un tubo conductor por donde pasa un�uido como aceite o agua. Para aplicaciones de mediana temperatura, aligual que los concentradores tipo Fresnel, son capaces de concentrar laenergía del sol a aproximadamente 30 veces.
El Colector Parabólico Compuesto (CPC) está constituido de 2 super�ciesparabólicas cuyo foco es el mismo, en ese foco se coloca un tubo de cobreque se pinta de negro para transformar la luz solar que llega a la super�ciede cobre en calor; el CPC concentra la luz en el foco y puede aún recibirrayos con incidencia oblicua de acuerdo a su ángulo de aceptación el quepuede ser aumentado con aletas de cobre soldadas a los tubos de cobre.Este conjunto permite también recibir y concentrar luz difusa de un díanublado.
Energía Solar Fotovoltaica
La Energía solar Fotovoltaica, es la energía radiante solar transformada enenergía eléctrica, a través de celdas fotovoltaicas que al exponerlas a la luz solar,produce energía eléctrica proporcional al �ujo luminoso que reciben gracias alefecto fotovoltaico. Este efecto fue descubierto por Becquerel en 1839 pero no fuedesarrollado como fuente de energía hasta 1954 por Chapin, Fuller y Pearsonquienes utilizaron como semiconductor: silicio dopado.[34].
El efecto fotovoltaico es un proceso a nivel atómico al incidir un fotón enel enlace entre átomos y romperlo, para que esto se logre con poca energía esde gran prioridad que el átomo sea inestable,es decir, que el número de elec-trones en su ultima capa de valencia se encuentre incompleta. Los materiales

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 17
Figura 2.6: Tecnologías a Media temperatura Colector a) de tubos evacuados,b) concentrador re�ector tipo Fresnel, c) concentrador de canal parabólico y d)concentrador parabólico compuesto. Imagen tomada de[3]
semiconductores presentan esta característica en su estructura molecular debidoa que en un semiconductor puro la corriente producida por el movimiento deelectrones es insigni�cante debido al bajo valor de portadores libres, así que se leagregan impurezas al material para aumentar los portadores libres, obteniendoun nuevo material denominado semiconductor extrínseco [35].
El desarrollo de los materiales semiconductores ha permitido la creación deceldas fotovoltaicas que a su vez conectadas en conjunto, componen a lo que sedenomina un Panel Fotovoltaico (ver Figura 2.7) .
2.2. Tipos de células Fotovoltaicas
Existen una gran variedad de células solares presentes en el mercado y enlos laboratorios de investigación, no obstante, las células más comunes son lasde silicio monocristalino, las de silicio policristalino y los módulos de capa �na,además de la existencia de más tipos de carácter experimental, que en ocasionesresultan con rendimientos superiores pero de escasa presencia en el mercado[36].

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 18
Figura 2.7: Panel solar. Imagen tomada de [4]
Células de Silicio Monocristalino
Se caracteriza por poseer una estructura cristalina completamente ordena-da. Se obtiene de silicio puro fundido dopado con boro. Se reconoce por sumonocromía azulada oscura y metálica (ver Figura 2.8).
Figura 2.8: Célula Monocristalino. Imagen tomada de [5]
Células de Silicio Policristalino
Se caracteriza por poseer una estructura ordenada por regiones separadas.Las zonas irregulares se traducen en una disminución de rendimiento. Para obte-ner una célula de silicio policristalino no di�ere en gran manera que la obtenciónde uno monocristalino a diferencia que el policristalino se forma con menos fasesde cristalización (combinación de átomos). Se reconoce porque en su super�ciese distinguen distintos tonos de azules y grises metálicos (ver Figura 2.9) .

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 19
Figura 2.9: Célula Policristalino. Imagen tomada de [5]
Células de Capa Fina
La implementación de las células de capa �na data desde la década de losnoventa. La característica principal se encuentra en el que el semiconductorse deposita en forma de una �na capa sobre un sustrato de coste menor. Losmateriales que se suelen usar como semiconductor son el silicio amorfo, elcobre−indio− diselenio(CIS), el telurodecadmio(CdTe) y el cobre− indio− galio−selenio(CIGS).
Las células de silicio amorfo ( ver Figura 2.10) poseen una estructura queno es cristalina, se puede depositar como una capa �na en diversos tipos desoportes lo cual brinda la posibilidad de construir células y módulos fotovoltaicos�exibles.
Figura 2.10: Célula Silicio Amorfo. Imagen tomada de[6]
En la Figura 2.11 se observa una tabla de e�ciencia evaluada en los tres tiposde células solares más utilizados en los cuales se puede inferir que la célula conmayor e�ciencia es la de Silicio Monocristalino.

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 20
Figura 2.11: Comparación de e�ciencia entre células solares. Imagen tomada de[7]
2.3. Seguidores Solares
El movimiento aparente solar respecto a la super�cie de la tierra puede serdescrito mediante ecuaciones vectoriales para dos sistemas de referencia, unocon respecto a los ejes terrestres y otro a los ejes locales. Lo primero que se debehacer es situar un punto de observación en la super�cie terrestre mediante supertenencia a un meridiano y a su distancia angular al plano ecuatorial. Las doscoordenadas terrestres o geográ�cas son LATITUD Y LONGITUD, Latitud deun lugar es el ángulo que forma la vertical del lugar con el plano del ecuador,se cuenta de 0°a 90° del ecuador hacia los polos puede ser positiva o negativa,según el lugar en el que se encuentre ya sea hemisferio norte o hemisferio sury la Longitud de un lugar es el ángulo que forma el meridiano que pasa porel lugar con otro meridiano que se toma como origen; se cuenta de 0°a 180° ypuede ser oriental y occidental según el lugar en el que situé este u oeste delmeridiano origen.
Figura 2.12: Coordenadas Geográ�cas. Imagen tomada de [8]
Los puntos que se encuentren en un mismo paralelo tienen igual latitud; lospuntos que se encuentren en un mismo semi−meridiano tienen igual longitud[37]. Para localizar al sol se emplean las coordenadas celestes, las cuales se

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 21
re�ere su posición al plano del horizonte y al meridiano del observador, estasson: ALTURA Y AZIMUT.
Altura es el ángulo formado por el rayo solar, dirigido al centro de la llamadabóveda celeste y el plano horizonte, se mide a partir del plano del horizonte haciael cenit, de 0°a 90°. Acimut es el ángulo formado por el plano vertical del rayosolar con el plano del meridiano del observador, es el ángulo formado por laproyección del rayo solar sobre el horizonte con eje norte-sur verdadero se midea partir del sur y pude ir de 0°a 180° hacia el este y oeste.
Figura 2.13: Coordenadas Celestes. Imagen tomada de [9]
Estas dos coordenadas celestes constituyen los datos básicos para el estudiodel posicionamiento del sol en un momento determinado [38]. Existe una relaciónpuntual entre las coordenadas geométricas y celestes como se ve en las ecuaciones2.1 y 2.2 para lo cual δ se de�ne como declinación y es hallado por medio de laecuación 2.3, τ es el ángulo horario y se determina de acuerdo a la ecuación 2.4, λ es latitud, h es la altura solar y z es el acimut.
senh = (cosλ • cosδ • cosτ) + (senλ • senδ) (2.1)
cosz =(senh • senλ− senδ)
cosh • cosλ(2.2)
δ = 23.45◦sen
(360
(284 + n
365
))(2.3)
para n como el día consecutivo del año.
τ = (12− hora) 15 (2.4)
Una vez obtenidas y de�nidas las coordenadas en un instante del tiempo, esposible determinar el ángulo de incidencia que posee el rayo solar en relación a

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 22
una super�cie inclinado con un ángulo (S) respecto al plano horizontal, y unaorientación (o) con respecto al sur. El ángulo de incidencia (θ) queda de�nidocomo el ángulo que se forma entre el rayo solar y la normal a la super�cie comose ve en la �gura 2.14 y es posible determinarla con la ecuación 2.5 [9]
Figura 2.14: Angulo de Incidencia de radiación solar sobre un plano inclinado.Imagen tomada de [9]
cosθ = (cosh • cosC • senS) + (senh • cosS) (2.5)
Ya de�nido el movimiento aparente del sol y su in�uencia en alguna super-�cie inclinada, se pude analizar los tipos de seguidores solares que se basan enasegurar que θ (ángulo de incidencia de la radiación solar) sea 90◦ para toda latrayectoria solar.
El método de seguimiento solar se puede diferenciar en dos grupos: los segui-dores activos los cuales se valen de componentes electrónicos y los pasivos quese valen de otras propiedades tales como el cambio de densidad de un líquidode bajo punto de ebullición.

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 23
Seguidor solar pasivo
El funcionamiento del seguidor pasivo no está basado en un control elec-trónico, está basado en el cambio de densidad de un líquido de bajo punto deebullición como es el freon. Se coloca el líquido en dos recipientes, que estánorientados de este a oeste e conectados entre si. Cuando el líquido recibe losrayos solares este se evapora y la diferencia de pesos provoca el movimiento delos paneles (ver �gura 2.15), los paneles están colocados de tal manera que seencuentran balanceando el peso y se agregan amortiguadores hidráulicos con el�n de contrarrestar la fuerza del viento[39].
(a) Sunrise (b) Morning
(c) Day (d) Evening
Figura 2.15: Fases de un Seguidor Pasivo. Imagen tomada de [10]
Seguidor solar eje azimutal
El seguidor solar azimutal gira sobre un eje vertical y la super�cie de losmódulos tiene una inclinación igual a la latitud del lugar para obtener un mejorrendimiento a lo largo del año. El movimiento es determinado directamente porel valor del ángulo de azimut del Sol. La curva que dibuja en el espacio presentasiempre la misma altitud con un volumen de trabajo reducido en comparacióncon los otros seguidores como se ve en la Figura 2.16.

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 24
Figura 2.16: Seguidor eje Azimutal. Imagen tomada de [11]
Seguidor solar eje horizontal
El seguidor solar gira sobre un eje horizontal norte-sur, los módulos soncolocados de manera paralela al eje de giro. La trayectoria dibujada es siempreun arco de este a oeste perpendicular al plano horizontal como se muestra en laFigura 2.17.
Figura 2.17: Seguidor eje Horizontal. Imagen tomada de [11]
Seguidor solar eje polar
El seguidor solar gira sobre un eje orientado en dirección norte-sur y conuna inclinación del eje igual a la latitud del lugar como se muestra en la Figura2.18, los módulos se colocan paralelos al eje de giro. Es muy parecido al seguidorhorizontal pero su inclinación provee una mejor ganancia por año con respectoa éste ya que la trayectoria que describe coincide con la trayectoria del Sol.

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 25
Figura 2.18: Seguidor eje Polar. Imagen tomada de [11]
Seguidor solar de dos ejes
El seguidor solar de dos ejes realiza dos movimientos automatizados pararealizar el seguimiento en los dos ángulos que determinan la posición del Solcomo se muestra en la Figura 2.19, con el �n de hacer un seguimiento más �ela la trayectoria solar y captar la mayor radiación durante el periodo solar. Sonlos únicos en que la super�cie de los módulos siempre son perpendiculares al Soltodo el día durante todo el año.
Figura 2.19: Seguidor de dos ejes. Imagen tomada de [11]
Sistemas de seguimiento solar existentes en el mercado
En la actualidad existen varios sistemas de seguimiento solar, solucionesbrindadas por proveedores especializados en estas aplicaciones, se presentaralos seguidores que están más presentes o con la arquitectura más presente en elmercado cada uno de ellos con sus respectivas características.
Seguidor de eje Horizontal por Mecasolar
El seguidor horizontal diseñado por mecasolar (ver Figura 2.20) es un segui-dor mono axial incrementa hasta un 30% la producción respecto a una instala-ción �ja, cuenta con hasta 12 ejes, movidos por un solo motor. En cada eje se

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 26
pueden colocar hasta 48 módulos es decir alcanza un producción hasta 11,6 kWpor eje [12].
Figura 2.20: Seguidor de eje horizontal diseñado por Mecasolar. Imagen tomadade[12]
Seguidor de eje Polar por Mecasolar
El seguidor polar diseñado por mecasolar (ver Figura 2.21)es un seguidormono axial polar, modular y de fácil instalación el cual incrementa hasta un30% la producción respecto a una instalación �ja. El seguidor consiste en unaserie de ejes inclinados respecto a la horizontal y orientados norte-sur sobreel que giran los paneles fotovoltaicos. Todos los ejes están conectados entre símediante una barra de transmisión pudiéndose mover una super�cie de panelesfotovoltaicos con un solo motor con un rango de movimiento de +45° a − 45°.El control del seguidor, es de tipo astronómico con posibilidad de backtraking;lo que permite una mayor producción de energía [13].
Figura 2.21: Seguidor de eje polar diseñado por Mecasolar. Imagen tomadade[13]
Seguidor de eje Polar por Enersol
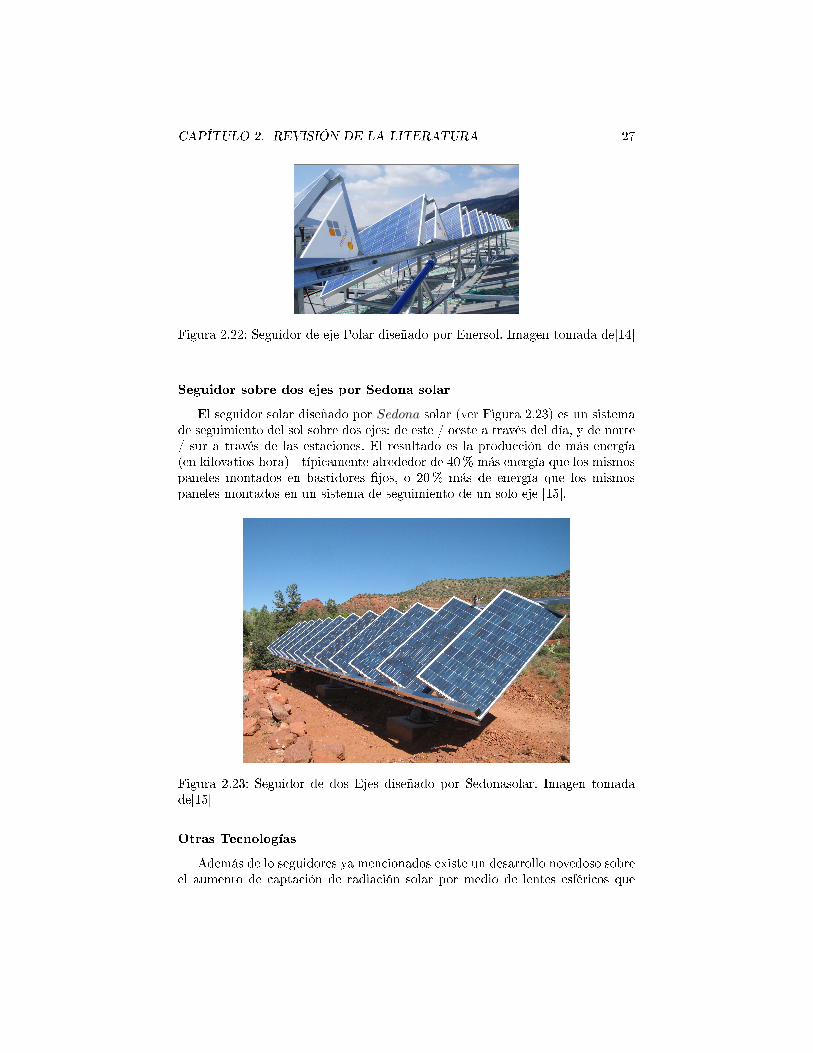
El seguidor solar diseñado por Enersol (ver Figura 2.22) es un seguidormodular el cual transmite su movimiento por medio de un per�l rígido a cadapanel, el sistema de seguimiento es capaz de obtener un 25% de producciónadicional respecto a una instalación �ja; cubre un ángulo de giro de +50°a−50°
y su sistema de seguimiento se basa en un algoritmo astronómico el cual calculala posición solar en cada momento [14].
CAPÍTULO 2. REVISIÓN DE LA LITERATURA 27
Figura 2.22: Seguidor de eje Polar diseñado por Enersol. Imagen tomada de[14]
Seguidor sobre dos ejes por Sedona solar
El seguidor solar diseñado por Sedona solar (ver Figura 2.23) es un sistemade seguimiento del sol sobre dos ejes: de este / oeste a través del día, y de norte/ sur a través de las estaciones. El resultado es la producción de más energía(en kilovatios-hora) - típicamente alrededor de 40% más energía que los mismospaneles montados en bastidores �jos, o 20% más de energía que los mismospaneles montados en un sistema de seguimiento de un solo eje [15].
Figura 2.23: Seguidor de dos Ejes diseñado por Sedonasolar. Imagen tomadade[15]
Otras Tecnologías
Además de lo seguidores ya mencionados existe un desarrollo novedoso sobreel aumento de captación de radiación solar por medio de lentes esféricos que

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 28
permiten la convergencia de todo haz de luz en un solo punto para aumentar laintensidad de incidencia de radiación solar como se muestra en la Figura 2.24desarrollado por Andre Broessel.
Figura 2.24: Rawlemon Captador solar. Imagen tomada de [16]
2.4. Controladores en Seguidores Activos
El desarrollo en la forma de captación de energía está enmarcado en estu-dios desde la creación de nuevos materiales, que dependiendo de sus propiedadesfísico-químicas aumentan la generación de voltaje según la transformación ener-gética que actúan dentro del panel, hasta el método de captación de energía,basados en diseños de seguidores solares, que aumenten la incidencia de radia-ción solar directa en el panel.
Los sistemas de seguimiento para la trayectoria solar activos di�eren en susistema de control, para lo cual se implementan variadas técnicas como el desa-rrollado por MustafaEngin y Dil³ad Engin los cuales emplean un microcon-trolador, dos módulos de control de motor, dos motores de corriente continua yun piranómetro entre otros componentes (ver Figura 2.25) como requerimientospara el desarrollo del algoritmo del control.
Figura 2.25: Diagrama de bloques del seguidor solar. Imagen tomada de [17]

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 29
El controlador establece primero el sistema en �HOME�, luego toma lainformación GPS para calcular la salida del sol y la puesta del sol. El momentoactual solar se compara con las horas de salida y puesta del sol para determinarsi el seguimiento debe iniciar o detener. Por la noche, se espera hasta la próximavez de muestreo, si esta entre los tiempos de puesta y salida del sol se lee el valordel piranómetro para comprobar si hay su�ciente la radiación solar para generarenergía. De lo contrario, el sistema permanece en la posición actual mientras quela radiación solar se eleva hasta el límite inferior de la radiación solar. Despuésque la radiación solar alcanza el valor deseado, entonces algoritmo lee el valordel anemómetro para de�nir si sistema puede moverse con seguridad. Si no, elseguidor se queda en �HOME� al menos durante un tiempo de muestreo. De locontrario, se inicia el seguimiento solar[17](ver Algoritmo 2.1).
Algoritmo 2.1 Diagrama de �ujo del algoritmo de seguimiento del sol. Imagentomada de[17]
El control implementado porWafa Batayneh,Abderahman Owais yMutasemNairouk es un regulador difuso sobre un sistema que permite el seguimiento so-lar sobre dos ejes[40]. El sistema consiste en un panel solar el cual es desplazadopor dos motores, cuatro sensores los cuales calculan la radiación solar en puntosestratégicos de estudio y según el valor medido por cada uno de ellos el contro-lador entrega una señal de ajuste al sistema como se muestra en el algoritmo2.2 para obtener un aumento en la e�ciencia de captación solar.

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 30
Algoritmo 2.2 Diagrama de �ujo para el sistema de control de seguimientosolar. Imagen tomada de[40]
El controlador esta dividido en tres procesos:
1. Fuzzi�cación: Calculo de pertenencia de cada entrada a las variables lin-güísticas de entrada establecidas [41][42].
2. Consecución de Reglas : Son reglas heurísticas de la forma SI (antecedente)ENTONCES (consecuente), donde el antecedente y el consecuente sontambién conjuntos difusos, ya sea puros o resultado de operar con ellos[43][44].
3. Desfuzzi�cación: Calcula la salida de acuerdo al valor difuso establecidopor las reglas [45].
Al Jumlat Ahmed y Shougat Nazbin Khan realizaron un estudio en Pondicherry,India en el cual estimaron el cambio de la posición angular respecto al horizontepor hora y sobre este dato desarrollaron un algoritmo (ver Algoritmo 2.3) paraestimar hacer el seguimiento solar [46].
Algoritmo 2.3 Diagrama de �ujo del seguidor empleando un temporizador.Imagen tomada de [46]

CAPÍTULO 2. REVISIÓN DE LA LITERATURA 31
LOUDADI Mounir y EL OMARI Hamid desarrollaron un sistema de se-guimiento solar sobre dos ejes. El sistema consta de dos partes principales: elsoftware y el hardware. La primera parte, desarrollado con el lenguaje Java, seutiliza para calcular y generar la posición del sol, así como helióstatos angularessegún a su ubicación geográ�ca (coordenadas GPS). El hardware, compuestode dos elementos, el sistema mecánico y un comando del microprocesador. Elmicroprocesador se utiliza para controlar y corregir la posición del seguidor altiempo que optimiza el movimiento y el consumo de motores que guían el sistema[18].
Este sistema es operado en una pequeña torre de control solar que contiene uncampo de helióstatos con una super�cie de 120m2 el cual contiene 101 espejos.Cada espejo tiene una dimensión de 40x40 cm2 y una altura de 36 cm. Estesistema permite la concentración de energía solar a un blanco �jo con una alturade 2m como se ve en la Figura el cual permite varias aplicaciones a pequeñaescala pueden ser desarrolladas implementando este sistema como: Baño devapor, las necesidades de salud de agua caliente sanitaria en un edi�cio enteroo cubrir varias familias, proceso de extracción aceites esenciales por destilaciónal vapor de agua, refrigeración solar ... etc.
Figura 2.26: Disposición de helióstatos. Imagen tomada de [18]
Los métodos de control mencionados anteriormente tienen la peculiaridadque no utilizan directamente la dinámica del panel solar como variable a con-siderar dentro del proceso de control, a diferencia del sistema que permite elcambio de orientación de los paneles.

Capítulo 3
SOLUCIÓN DEINGENIERÍA
Introducción
Este capítulo está de�nido para el desarrollo del sistema mecatrónico quedará solución a la problemática presentada, describe el diseño mecánico delseguidor solar y el diseño del sistema de control.
3.1. Diseño Mecánico
El Seguidor solar diseñado deberá tener las siguientes consideraciones:
El diseño estará presente según las condiciones geográ�cas situadas enCajicá, Colombia a una latitud correspondiente de 4,92°.
El diseño debe ser modular; debe tener la capacidad para que el mismomecanismo pueda actuar sobre otros con el mínimo de componentes sobreel sistema haciendo modi�caciones de pequeña escala al diseño individual.
El diseño debe estar basado en el panel X21 345 provisto por SUNPOWERcomo base según sus dimensiones y características técnicas.
En el capítulo 2.3 se mencionó distintas arquitecturas de seguimiento que puedensatisfacer las necesidades de diseño; para escoger la que más se adecua a nuestrocaso se efectuó una matriz de decisión teniendo en cuenta los siguientes tópicos:
Rendimiento: Considera el aumento de producción de energía eléctrica através de la captación de energía solar respecto a un sistema �jo.
Instalación: Considera la facilidad de acomodar cada componente que ajus-ta al sistema para que logre su función correspondiente.
32

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 33
Costo de Fabricación: Contempla el gasto económico que representa lafabricación del seguidor.
Prestación Modular: Hace referencia a la capacidad que tiene el sistemapara que se le agregue más módulos permitiendo la transmisión del movi-miento a cada uno de ellos sin que se di�culte su instalación.
Cuadro 3.1: Matriz de decisión Selección Sistema de Seguimiento
El sistema escogido gracias a la matriz de decisión como se ve en el Cuadro3.1 es el seguidor con arquitectura de eje polar, para ello se calcula el ángulo deelevación que tendrá el seguidor el cual estará en un rango de [4.8 a 5°]; latituda la que se encuentra Cajicá como se muestra en la Figura 3.1[47].
Figura 3.1: Coordenada Campus Cajicá. Imagen tomada de [19]
En general conviene tener el generador fotovoltaico orientado hacia el ecua-dor terrestre (hacia el sur en el hemisferio norte y hacia el norte en el hemisferiosur)[48]
Existen distintos mecanismos de transmisión de movimiento de rotación ge-nerados desde un movimiento lineal entre ellos el mecanismo de biela manivela

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 34
o mecanismos basados en un sistema de cuatro barras con determinadas restric-ciones, el mecanismo que se selecciono se hizo teniendo en cuenta su facilidadde instalación como se ve en las Figuras 3.2, 3.9 y 3.10.
(a) Mecanismo es-quemático de barras
(b) Mecanismo en el prototipo
Figura 3.2: Descripción e implementación del mecanismo
Los factores a tener en cuenta para el proceso de diseño del mecanismo detransmisión son el rango de ángulos salientes que el sistema tendrá [+/−45°] yel rango de carrera de un actuador lineal comprendido entre [200-300]mm, yade�nidos estos datos se consideran las relaciones matemáticas para desarrollary encontrar las dimensiones correspondientes que dará solución y cumplirán conlas especi�caciones propuestas, como se muestra en la �gura 3.3.
Figura 3.3: Análisis Preliminar Mecanismo
Se estudian los tres casos más representativos del movimiento que tendrá elsistema de seguimiento solar y según los datos obtenidos se harán ajustes sobresu diseño para satisfacer los requerimientos dados como se muestra en la �gura3.4.

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 35
Figura 3.4: Algoritmo de Diseño
En el desarrollo del algoritmo de diseño mecánico se considero bocetos pre-vios que satisfacían al menos uno de los requerimientos necesarios para el desa-rrollo del prototipo entre ellos:
Boceto1: El boceto que muestra la Figura 3.5 fue diseñado para estu-diar y comprender la transmisión de movimiento por el mecanismo bielamanivela; se descartó por la di�cultad de instalación y debido a que nogarantizaba el ángulo de elevación característico de un seguidor polar.
Figura 3.5: Boceto 1
Boceto 2: El boceto que muestra la Figura 3.6 fue diseñado para asegurarel ángulo de elevación característico del eje polar.

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 36
Figura 3.6: Boceto 2
Boceto 3: Es una modi�cación del anterior boceto; incluyendo la trans-misión de movimiento producido por un actuador lineal. Se descartó porque no aseguraba estabilidad en la transmisión de movimiento ni en ladisponibilidad del actuador lineal como se muestra en la Figura 3.7.
Figura 3.7: Boceto 3
Boceto 4: El boceto que muestra la Figura 3.8presenta una solución dife-rente frente a la instalación del actuador lineal; se descarta por la formade sujeción del actuador y anclaje a la base principal.
Figura 3.8: Boceto 4

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 37
Al terminar las modi�caciones necesarias en el último boceto se continúo elproceso de diseño hasta obtener el prototipo propuesto para el desarrollo delseguimiento solar como se ve en las Figuras 3.9 y 3.10.
Figura 3.9: Prototipo Sistema Orientación sobre Eje Polar
Figura 3.10: Sujeción Sistema Orientación y Transmisión de Movimiento
Backtracking
La generación de sombras en un sistema de orientación modular para el segui-miento del sol tiene como consecuencia pérdidas considerables de energía solarútil para la generación de energía eléctrica, es por esto que a las instalacionesmodulares se le recomiendan dejar una separación entre colectores. Se analizael sistema para las condiciones límite del movimiento que tiene el seguidor solarcomo se muestra en la Figura 3.11.

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 38
Figura 3.11: Calculo Distancia entre Paneles [19]
D = d1 + 2d2 (3.1)
d1 =2 `2sin(45°)
tang(45°)(3.2)
siendo ` la longitud del panel se deducen las distancias en relación a estavariable.
d1 =`√
2
2
d2 =`√
2
4(3.3)
D = `√
2 (3.4)
El mecanismo para la transmisión de movimiento sobre otros módulos sepuede ver en la Figura 3.12 y la ejecución sobre el prototipo de orientación enla Figura 3.13.
Figura 3.13: Prototipo Sistema de Orientación Modular

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 39
(a) Esquema de transmisión propuesta entre módulos
(b) Implementación en el prototipo
Figura 3.12: Transmisión de movimiento para el prototipo modular
El material propuesto para el desarrollo del prototipo es el ACERO AISI304 por sus propiedades mecánicas resistencia a la �uencia y capacidad parael conformado y el soldado además de ser un acero inoxidable capaz de resistircondiciones de humedad y corrosión.
Modelo dinámico del sistema
Los coe�cientes de fricción presentados dentro del prototipo se considerannulos debido a que la dinámica del movimiento del actuador lineal es transmitidaen su totalidad hacia el prototipo. Se considera la dinámica del seguidor solarigual a la dinámica del actuador lineal, de acuerdo a esto se reconstruye sumodelo como: θ
θ
i
=
0 1 00 −b
JKJ
0 −KL
−KL
θθi
+
001L
V (3.5)
y =[
1 0 0] θ
θi
(3.6)
siendo
θ = PosicionAngular
b = Constante de friccion viscosa
J = Momento de inercia del rotor

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 40
k = Constante de torque
L = Inductancia electrica
i = Corriente electrica
Además el sistema considera la función del panel fotovoltaico quien es el queentrega la energía captada por la radiación solar.
Descripción del Modelo Matemático de un Panel Fotovoltaico
El modelo que describe el comportamiento de una célula solar el cual es im-plementado por varios autores involucran las variables mostradas en la Figura3.14, la cual representa el modelo a nivel de circuito eléctrico correspondiente[20].
Figura 3.14: Modelo de Circuito eléctrico equivalente de una Celda Fotovoltaica.Imagen tomada de[20]
Donde V indica la diferencia de potencial brindada por los paneles e I lacorriente entregada por la celda.
Las variables involucradas en el modelo equivalente eléctrico tienen una re-lación puntual mostrada en la ecuación 3.7
I = 2.6Il − I0(e(v+RsVt
) − 1)− (v + IRs)
Rp(3.7)
donde Il es la corriente foto generada por la energía radiante, I0 es la co-rriente de saturación inversa producida por la recombinación de los portadores,Rs es una resistencia que representa las perdidas en los cables y perdidas in-ternas, Rp es la resistencia en paralelo, que representa cualquier camino de altaconductividad a través de las junturas p − n o en el borde y Vt es el voltajetérmico dado por la ecuación 3.8.
Vt =nKT
e(3.8)
Para T representando la temperatura de la celda en grados kelvin, K es laconstante de Boltzman, e es la carga del electrón y n es el factor de idealidaddel diodo.

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 41
La corriente Il se encuentra en función de las dimensiones de la celda, su áreaA en cm2, la densidad de corriente de corto circuito Jsc en A
cm2 ,la temperaturade trabajo T en ◦C, el factor de temperatura αjsc en A/◦C cm2 y la irradianciaG en W/m2, como muestra la ecuación 3.9.
Il = A
(JscG
1000+ αJsc (T − 27)
)(3.9)
La corriente I0 se calcula en función del voltaje térmico Vt, la energía delgap Eg en eV , la tensión de circuito abierto Voc en voltios y la temperaturaTken kelvin (ver ecuación 3.10). Los parámetros αgap y βgap son coe�cientes detemperatura, Eg0 la energía gap a 0◦C y V
′
t es el voltaje térmico a 300◦K
I0 =JscAT
3k e
EGVτ
en VocVt′ t 3003e
Eg′
Vt′
(3.10)
EG = EGO −αgapT
2k
βgap + Tk(3.11)
El modelo de celda fotovoltaica descrito permite plantear un modelo de pa-nel. Generalmente el conjunto de celdas de un panel no tienen las mismas ca-racterísticas, sin embargo la mayoría de los problemas prácticos no precisa degrandes detalles es por esto que se plantean las siguientes restricciones: las cel-das son idénticas, están iluminadas de la misma forma y trabajan a la mismatemperatura. Estas simpli�caciones permiten calcular la corriente y la tensiónde un conjunto de celdas mediante un cálculo sencillo por medio de la ecuación3.12.
V = NsVcelda I = NpIcelda (3.12)
Donde Ns es el número de celdas en serie y Np número de celdas conectadasen paralelo.
La relación entre la dinámica mecánica del sistema de orientación y la delpanel fotovoltaico para la producción de energía se observa en la Figura 3.15donde θ es el ángulo que tiene el sistema de orientación, Rs es la radiaciónbrindada por el sol, α es el ángulo que representa la posición del sol, RT laradiación que entra en el panel fotovoltaico e i la corriente producida por él. Seobserva que la radiación que entra en el panel está in�uenciado directamentepor la diferencia de ángulos entre el sistema de orientación y el ángulo al quela radiación producida por el sol, el control asegura que este error sea nulo omínimo para obtener la máxima concentración de energía solar.

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 42
Figura 3.15: Relación entre modelo mecánico y panel solar
3.2. Diseño Controlador
CONTROL ADAPTATIVO
El control adaptativo se basa en diseñar, estudiar y poner en prueba unregulador que pueda modi�car su propio comportamiento en respuesta a cambiosen la dinámica del sistema a controlar y/o a las perturbaciones que inciden eneste.
Una de las de�niciones más aceptadas de control adaptativo es que es un tipoespecial de control no lineal en el que el estado del proceso puede ser separadoen dos escalas, como se muestra en la Figura 3.16, las cuales evolucionan adiferente velocidad. La escala lenta corresponde a los cambios de los parámetrosy por consiguiente a la velocidad con la cual los parámetros del regulador sonmodi�cados, y la escala rápida que corresponde a la dinámica del bucle ordinariode realimentación.
Figura 3.16: Con�guración Básica de Control Adaptativo. Imagen tomada de[21]
Los sistemas de control adaptativo están clasi�cados en una manera generalpor dos grandes grupos:
Controladores adaptativos por modelo de referencia (MRAC).

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 43
Reguladores auto ajustables (STR).
En ambas estrategias supone la existencia de un controlador lineal que hace queel sistema en bucle cerrado cumpla los requisitos de diseño, para cualquier juegode valores de los parámetros del sistema y de las perturbaciones.
Los MRAC intentan alcanzar un comportamiento en bucle cerrado deseadoque viene especi�cado por un modelo de referencia. Por otra parte, los STRintentan alcanzar un control lo mejor posible (optimo) a partir de un tipo decontrolador pre�jado y la información obtenida del proceso (señales de entrada,salida, etc...)[49].
Controladores Adaptativos con modelo de referencia (MRAC) Regladel MIT
Dentro de los controles adaptativos, se encuentra el desarrollado por Whita-ker del MIT(1958), Instrumentation laboratory, denominándose por ello comola regla del MIT como control por modelo de referencia.
La con�guración más usual para un control con modelo de referencia es im-plementando un modelo paralelo (ver Figura 3.17), aunque existen otras posiblescon�guraciones [50][51] como serie, serie-paralelo, etc.
Figura 3.17: Estructura con un modelo de referencia (MRAC). Imagen tomadade [21]
Teniendo un modelo de referencia Gm(s, p) y un sistema ajustable Ga(s, p),el cual se quiere tenga un seguimiento al modelo de referencia para que el errorentre ellos sea nulo o mínimo en presencia de perturbaciones, se de�ne el índicede funcionamiento como:

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 44
J =1
2
�e2dt; e = ym − ya (3.13)
ym - Salida del modelo de Referencia,
ya - Salida del modelo ajustable,
p - parámetro a ajustar .
Para esto se utiliza la técnica de optimización del gradiente[50] [52]. Se tieneque la regla de adaptación es:
4p(e, t) = −Kgrad(J) = −K∂J
∂p(3.14)
Siendo 4p la variación de p con relación al último valor calculado y K laganancia de adaptación.
La variación del parámetro ajustable con relación al tiempo será:
˙p =dp
dt= −K ∂
∂t
(∂J
∂p
)(3.15)
La ecuación 3.15 se puede expresar también como:
˙p = −K ∂
∂p
(∂J
∂t
)= −K ∂
∂p
(1
2e2)
˙p = −Ke∂e∂p
(3.16)
La ley de adaptación 3.16 representa la regla del M.I.T [53].El objetivo del control adaptativo por modelo de referencia es hacer que la
planta siga al modelo de referencia esto implica que el erro sea cero por lo quese tiene:
ym = ya → KpG(p).uc = k0G(p).uc
De modo que
u =k0Kp
uc (3.17)
Se tiene que Kp es el parámetro que varia en la planta por lo que se puedeelegir p =
Kp
k0, aplicando la regla MIT, dejando el error en función del parámetro
p como se muestra en la ecuación 3.18.
e = KpG(p)puc − k0G(p)uc (3.18)
Se calcula el gradiente del error para aplicar la regla del MIT de modo que

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 45
∂e
∂p= KpG(p)uc =
Kp
k0ym
˙p = −Kepym (3.19)
Se aplica la transformada de Laplace a la ecuación 3.19 para solucionar elsistema diferencial, obteniendo la ley de adaptación para un sistema de controlproporcional adaptativo [54] descrito por la ecuación3.20.
p =γ
syme (3.20)
Siendo γ la constante de adaptación y teniendo un esquema de control comose muestra en la �gura3.18.
Figura 3.18: Control Adaptativo proporcional por modelo de referencia. Imagentomada de [21]
Partiendo del esquema mostrado en la �gura 3.18 se procede a diseñar el con-trol para el sistema seguidor según la suposición de que el cálculo del ángulo deproyección de radiación es realizable por la locación espacial expresados según sulatitud, su día Estructura con un modelo de referencia (MRAC)correspondientedel año y la hora del día.

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 46
Figura 3.19: Angulo Real proyectado del sol en un día
En la �gura 3.19 se observa la proyección del ángulo para un día a una latitudcorrespondiente aproximada de 4.94 , la curva que se toma como estudio es laque aparece en el rango de [5 − 18] horas debido a que representa la incidenciadel sol como generador de energía. Este rango se aproxima con un polinomio decuarto orden teniendo la función como:
θ(t) = 0.01133t4 − 0.5864t3 + 11.02t2 − 74.02t+ 157.7 (3.21)
Figura 3.20: Regresión Polinomial

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 47
El sistema de orientación debe tener un seguimiento preciso para generarla máxima e�ciencia de conversión de energía solar, esto quiere decir que lospaneles solares deben mantenerse perpendiculares a la radiación solar. Los án-gulos solares se obtienen a partir de la ecuación 3.21. Esta función tiene que seradaptada para producir una señal de control con el �n de generar el movimientopreciso sobre el actuador. Los componentes del sistema de orientación tiendena degradarse con el tiempo o las condiciones ambientales, factores que no setienen presentes en el modelo del sistema es por estas razones que se diseña unseguidor adaptativo, para ello se reescribe la ecuación 3.21 como:
θ = β(t)α (3.22)
donde
β(t) = [ t4 t3 t2 t 1 ] (3.23)
α = [ 0.01133 −0.5864 11.02 −74.02 157.7 ]T (3.24)
Figura 3.21: Control Adaptativo
Para evitar caer en un punto que pueda inestabilizar la sistema de orien-tación, se pre-estabiliza el sistema diseñando un control por realimentación deestados identi�cando a priori el sistema para que funcione con cualquier estruc-tura de un grado de libertad.
CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 48
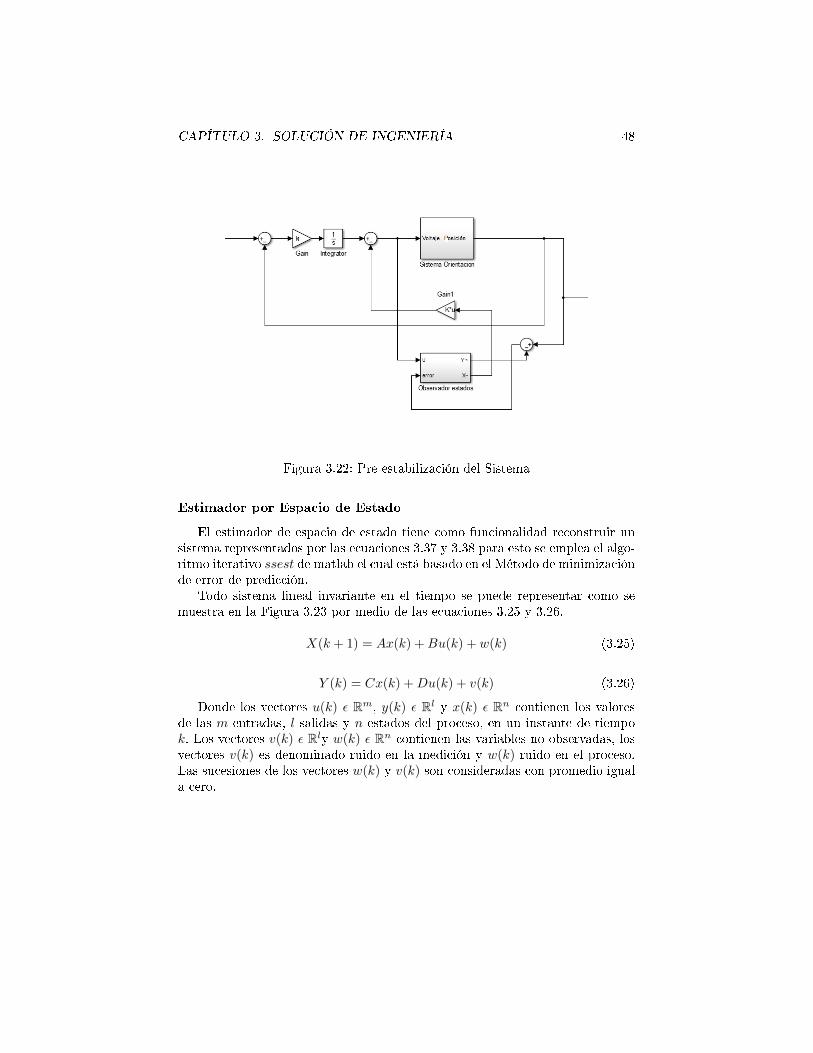
Figura 3.22: Pre estabilización del Sistema
Estimador por Espacio de Estado
El estimador de espacio de estado tiene como funcionalidad reconstruir unsistema representados por las ecuaciones 3.37 y 3.38 para esto se emplea el algo-ritmo iterativo ssest de matlab el cual está basado en el Método de minimizaciónde error de predicción.
Todo sistema lineal invariante en el tiempo se puede representar como semuestra en la Figura 3.23 por medio de las ecuaciones 3.25 y 3.26.
X(k + 1) = Ax(k) +Bu(k) + w(k) (3.25)
Y (k) = Cx(k) +Du(k) + v(k) (3.26)
Donde los vectores u(k) ε Rm, y(k) ε Rl y x(k) ε Rn contienen los valoresde las m entradas, l salidas y n estados del proceso, en un instante de tiempok. Los vectores v(k) ε Rly w(k) ε Rn contienen las variables no observadas, losvectores v(k) es denominado ruido en la medición y w(k) ruido en el proceso.Las sucesiones de los vectores w(k) y v(k) son consideradas con promedio iguala cero.

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 49
Figura 3.23: Sistema Lineal Invariante en el tiempo
Se puede Reescribir las ecuaciones anteriores como:
˜xi+1 = Axi +Bui +KEi (3.27)
Yi = Cxi +Dui + Ei (3.28)
donde:
Ui,(u(i)u(i+ 1)...u(i+ j − 1))εRmxj
Yi,(y(i)y(i+ 1)...y(i+ j − 1))εRixj
Ei,(e(i)e(i+ 1)...e(i+ j − 1))εRixj
Las ecuaciones 3.27 y3.28 pueden ser reescritas como(˜Xi+1
Yi
)=
(A BC D
)(Xi
Ui
)+
(KI
)Ei (3.29)
En una forma general se tiene
y = θx+ ε (3.30)
donde:
y ,
(˜Xi+1
Yi
), θ ,
(A BC D
)x ,
(Xi
Ui
), ε ,
(KI
)La covarianza de error tiene la forma
Σ , Cov(εk)
(KI
)Re
(KT I
)=
(KReK
T KRe
ReKT Re
)(3.31)

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 50
=
(Σ11 Σ12
Σ21 Σ22
)De la ecuación 3.31 se tiene:
Re =∑22
(3.32)
K = Σ12Σ−122 (3.33)
Se utiliza el algoritmo de mínimos para resolver la ecuación 3.30:
y = θx
θ = yx+ = yxT (xxT )−1
(A B
C D
),
(θ11 θ12θ21 θ22
)= θ (3.34)
Los residuos son calculados como:
ε = y − θx (3.35)
De acuerdo a la ecuación 3.31 la covarianza de ε puede ser expresada ycalculada como:
Σ =
(Σ11 Σ12
Σ21 Σ22
)=
1
j − (n+m)εεT (3.36)
Re =∑22
(3.37)
K = Σ12Σ−122 (3.38)
La implementación del estimador por espacio de estados basado en el mé-todo de minimización de error de predicción por el comando ssest generara losresultados mostrados en la Figura 3.24 los cuales muestran una estimación del100 % además de las matrices que constituyen su modelo.

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 51
Figura 3.24: Resultado SSEST
Identi�cado la dinámica del sistema se reconstruye un observador de estadoel cual entregara los estados del sistema que se utilizaran como realimentaciónpara general la señal de control en la Figura 3.25 se muestra el esquema generalde la implementación del estimador de estados y la reconstrucción del observadorde estados.

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 52
Figura 3.25: Observador Reconstruido según la identi�cación por espacio deestados
Observadores de Estado
Un observador de estado es un sistema dinámico cuyos estados convergen alos del sistema observado. Luego puede implementarse un control por realimen-tación de los estados observados.
Se considera que se desea estimar los estados X de un sistema lineal descritopor las ecuaciones 3.25 y 3.26.
Conociendo las matrices A, B, C y con perturbaciones V yW =0. Se proponela siguiente estructura genérica para el observador.
˜x = A0x+ Ly (3.39)
Donde las matrices A0y L deben ser diseñadas para cumplir el objetivo deforzar la convergencia de los estados del observador a los del sistema. La diná-mica del error de�nido por la diferencia de los estados del sistema y los estadosdel observador resulta de la diferencia entre las ecuaciones 3.25,3.26y3.39:
e = x− ˜x = Ax+Bu−A0x− Ly − z (3.40)
e = (A− LC)x+Bu− z (3.41)
Para asegurar que el error e = x− ˜x converja a cero, más allá de la excitaciónu del sistema, de su salida y y del valor inicial del error e(0), la ecuación 3.41debería poder reducirse a:
e = Ae (3.42)
Donde los auto valores de la matriz A deben pertenecer al semiplano izquier-do. Esta reducción es posible si:

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 53
A0 = A− LC = A (3.43)
z = Bu (3.44)
Ahora el diseño del observador se reduce a encontrar una matriz L que asignesus auto valores como se muestra en [22]. Buscando obtener:
1. El semiplano izquierdo, lo cual asegura la estabilidad del observador.
2. A la izquierda de los auto valores del sistema para asegurar que la dinámicadel observador sea más rápida que la del sistema.
La Figura 3.26 muestra un diagrama de bloques del conjunto sistema-observadory la Figura 3.27 su implementación.
Figura 3.26: Esquema de un observador de estados. Imagen tomada de [22]
Después de obtener las variables de estado por el observador se plantea elcontrolador por espacio de estados asegurándonos que no exista error en estadoestable aumentando el orden del sistema incluyendo una ganancia integral [22].
La matriz aumentada del sistema se calcula como:
A∗ =
[A 0−C 0
]
B∗ =
[B0
]Obtenidas las matrices aumentadas se calcula las ganancias de realimenta-
ción de estado según los parámetros de diseño escogidos los cuales fueron ζ = 0.9y ts = 1s para generar una respuesta suave, luego se incluye el panel solar fo-tovoltaico para determinar la energía producida y completar la fase de diseñocomo se muestra en la Figura 3.28.

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 54
Figura 3.27: Observador de estados
Figura 3.28: Esquema completo Sistema
3.3. Validación Datos de Radiación Solar
Antes de encontrar la e�ciencia generada por el sistema de seguimiento y deun sistema �jo se debe validar los datos a los que se tienen acceso de la radiaciónmedida durante 5 años por la estación climática regional ubicada en Cajicá.
Se propone el método de análisis de varianza (ANOV A) según las caracte-rísticas de periodicidad y magnitud de la radiación; la radiación solar no está

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 55
presente durante todo el día y mantiene un margen de magnitud máximo al quepuede llegar.
Se selecciona un día al año al azar el cual fue el 17 julio, se obtienen losdatos de radiación medidos durante ese día los cuatro años en los cuales estáregistrado (2010,2011,2012,2013) siendo cada uno de estos el grupo 1, grupo 2,grupo 3 y grupo 4 respectivamente.
Si el resultado de este análisis resulta que los grupos son signi�cativamentediferentes quiere decir que los datos no son verídicos y que tienen un errorcausado por instrumentación u otros factores.
Se implementó el comando anova1 de matlab el cual devuelve un valor de pbajo la hipótesis nula de que todas las muestras proceden de poblaciones con lamisma media.
Si p es cercano a cero, se pone en duda la hipótesis nula y sugiere que porlo menos una media muestral es signi�cativamente diferente que otra muestra.Los niveles de signi�cación comunes están entre 0,05 o 0,01.
La �gura 3.29 muestra el diagrama de cajas y la media de cada año medido yla Figura 3.30 muestra el resultado de la comparación de cada uno de los gruposo años muestreados con un factor p = 0.3727.
Figura 3.29: Diagrama de cajas

CAPÍTULO 3. SOLUCIÓN DE INGENIERÍA 56
Figura 3.30: Comparación de Datos

Capítulo 4
RESULTADOS Y ANÁLISISDE RESULTADOS
Introducción
En este capítulo se observan los resultados del diseño propuesto en la partemecánica con el análisis por elementos �nitos y de la respuesta del sistema conel control diseñado.
4.1. Diseño Mecánico
Se realizó el análisis sobre el prototipo considerando la carga producida porel panel X21 345 el cual tiene un peso de 18.6Kg y un caudal de viento conuna velocidad de 16 m
s como se muestra en la Figura 4.1. Escogido por lamáxima velocidad registrada con un factor de seguridad de 1, 3 debido a que lavariabilidad de la velocidad del viento no es tan notable
57

CAPÍTULO 4. RESULTADOS Y ANÁLISIS DE RESULTADOS 58
Figura 4.1: Análisis de Cargas sobre el Prototipo
La Figura 4.3 muestra la distribución de carga en el prototipo, obteniendola carga aplicada sobre los soportes del actuador los cuales representan la fuerzaque deberá generar el actuador como se muestra en la Figura 4.3.
Figura 4.2: Tensión de von Mises

CAPÍTULO 4. RESULTADOS Y ANÁLISIS DE RESULTADOS 59
Figura 4.3: Fuerza Actuador Lineal
Esta fuerza resultante signi�ca la fuerza que debe emplear el actuador linealpara mantener las condiciones de estudio. El actuador lineal propuesto es el mo-delo LA22 de LINAK por sus características mecánicas y sus dimensiones, coneste se puede soportar una cargar de 15 paneles solares para la implementacióndel seguidor modular.
La Figura 4.4 muestra las deformaciones que tendrá el seguidor solar obte-niendo como máxima deformación 1.448x10−0.01mm, lo cual demuestra que elprototipo diseñado soportara las consideraciones de estudio.
Figura 4.4: Deformaciones unitarias

CAPÍTULO 4. RESULTADOS Y ANÁLISIS DE RESULTADOS 60
4.2. Diseño Controlador
No existen criterios para calcular el factor de adaptabilidad para un contro-lador basado en la regla del MIT es por esto que se hacen varias pruebas condistintos valores de modo que muestre la in�uencia de este factor. Según [21]este factor oscila en valores pequeños menores que 1 de modo que ajuste la señalde control sin repercutir en la estabilidad del sistema.
La respuesta del sistema de orientación producida por la señal de regulacióndel controlador presente en tres días seguidos con un factor de adaptabilidad de0.0004 se observa en la Figura 4.5, de 0.000078 en la Figura 4.6 y de 0.00078 enla Figura 4.7 respectivamente.
Figura 4.5: Salida control adaptativo con un factor de adaptabilidad de 0.0004
Figura 4.6: Salida control adaptativo con un factor de adaptabilidad de 0.000078

CAPÍTULO 4. RESULTADOS Y ANÁLISIS DE RESULTADOS 61
Figura 4.7: Salida control adaptativo con un factor de adaptabilidad de 0.00078
Los resultados mostrados en las Figuras 4.5, 4.6y 4.7 permiten deducir quea partir del segundo día el seguimiento del modelo de referencia es más preciso,y que el controlador es capaz de producir una señal de control que ajusta elsistema de orientación, para que la siga con gran precisión en su rango lineal yen el caso en que la referencia vuelve a cero el regulador genera una respuestasuave y lenta para los valores del factor de adaptabilidad estudiados.
La �gura 4.8 muestra la dinámica del sistema pre estabilizado cumpliendocon el tiempo y la dinámica deseada; ζ = 0.9 y ts = 1s.
Figura 4.8: Respuesta Pre estabilizada

CAPÍTULO 4. RESULTADOS Y ANÁLISIS DE RESULTADOS 62
La �gura 4.9 representa el error obtenido en la diferencia de la respuesta delmodelo identi�cado frente al modelo del sistema real.
Figura 4.9: Error presente en el observador de estados
La �gura 4.10 presenta la comparación de la corriente que produciría unsistema con un porcentaje de e�ciencia igual a 100% frente a un sistema deorientación basado en control adaptativo con un factor de adaptabilidad de0.0004 y un sistema de captación estática.

CAPÍTULO 4. RESULTADOS Y ANÁLISIS DE RESULTADOS 63
Figura 4.10: Comparación en Producción de Energía durante tres días
4.3. Carga Aprovechada
Se calculo la carga producida por los tres casos de estudio: máximo apro-vechamiento de la radiación, aprovechamiento del sistema de captación con se-guimiento solar basado en control adaptativo con un factor de adaptabilidad de0.0004 y aprovechamiento de un sistema de captación �ja para tres días; comoel área bajo la curva de la corriente producida por un día, como se muestra enla �gura 4.11
Figura 4.11: Comparación Carga Producida

CAPÍTULO 4. RESULTADOS Y ANÁLISIS DE RESULTADOS 64
Conclusiones
Por medio del análisis de la varianza se logró valorar los datos de radiaciónsolar obtenidos de una estación climática de la corporación autónoma regionaly se obtuvo que estas mediciones no poseen alteraciones o daños en su instru-mentación al evaluar un día en especí�co al año respecto a sus correspondientesde años posteriores. Se encontró que pertenecen a la misma variable de análisisy que no posee diferencias signi�cativas que argumenten alguna alteración ensus datos censados sobre radiación solar.
El prototipo diseñado de un grado de libertad sobre eje polar inclinado a 5°cumple con las especi�caciones al ser diseñado con un ángulo de elevación muysimilar a la latitud del municipio de Cajicá, Colombia lo que permite mayorcaptación de radiación solar.
Al analizar el funcionamiento del control adaptativo se determina que elfactor de adaptabilidad es una variable que in�uye en gran medida sobre laestabilidad del sistema a controlar y supone una desventaja sobre el método decontrol al no tener un criterio especi�co en su selección distinto de que sea devalor bajo. En el estudio desarrollado se establece que a partir del segundo díade ejecución del controlador, se adapta al modelo de referencia pese a que seamodelada como una función a trozos, mejorando el seguimiento de la trayectoriasolar, elevando la e�ciencia en captación de carga a un 98% con un factor deadaptabilidad igual a 0.0004.

Bibliografía
[1] J. A. C. G. R. C. P. A. C. S. M.-A. C. Gil, Centrales de energías renovables.PEARSON EDUCIÓN SA, 2009.
[2] E. Múller, �Manual de diseño para viviendas con climatización pasiva,�Forschungslabor fúr Experimentelles Bauen, Universidad de Kassel, Ale-mania, 2002.
[3] O. A. Jaramillo, �EnergÍa solar tÉrmica de mediana temperatura para calorde proceso,� Universidad Nacional Autónoma de México.
[4] sunpower, �http://us.sunpower.com/solar-panels-technology/x-series-solar-panels/,� 20 enero 2015.
[5] G. Montiel Bustos, �Análisis y comparación de las diferentes tecnologíasactuales de las células fotovoltaicas,� 2009.
[6] cifes, �http://cifes.gob.cl/tecnologias/solar/fotovoltaica-pv/silicio-amorfo-a-si,� 3 Febrero 2015.
[7] O. O. Muñoz and D. S. Revollo, �OptimizaciÓn de la e�ciencia de sistemasfotovoltaicos a travÉs de recolecciÓn solar, basada en lentes de fresnel.�
[8] ArcGIS, �http://resources.arcgis.com/es/help/getting-started/articles/026n0000000s000000.htm,� 2 febrero 2015.
[9] V. A. F. Freixanet, �Geometria solar.�
[10] zomeworks, �http://www.zomeworks.com/photovoltaic-tracking-racks/how-trackers-work/,� 19 febrero 2015.
[11] B. A. José, Prototipo fotovoltaico con seguimiento del Sol para procesos elec-troquímicos. Centro Nacional de Investigación y Desarrollo Tecnológico,2007.
[12] mecasolar, �http://mecasolar.com/pub/doc/�le/cast/1-horizontal-axis-tracker-mecasolar-catalog.pdf,� 20 Marzo 2015.
[13] ��, �http://mecasolar.com/pub/doc/�le/cast/1-axis-polar-tracker-mecasolar-catalog.pdf,� 20 Marzo 2015.
65

BIBLIOGRAFÍA 66
[14] Enersol, �http://www.enersolsl.com/noticia.asp?idnoticia=120763,� 20Marzo 2015.
[15] S. Solar, �http://sedonasolartechnology.com/performance/,� 20 Marzo2015.
[16] rawlemon, �http://www.rawlemon.com/pages/technology.� [Online]. Avai-lable: http://www.rawlemon.com/pages/technology
[17] M. Engin and D. Engin, �Optimization mechatronic sun tracking systemcontroller's for improving performance,� in Mechatronics and Automation(ICMA), 2013 IEEE International Conference on. IEEE, 2013, pp. 1108�1112.
[18] M. Loudadi and H. El Omari, �Solar tracking systems for solar concentrator�eld of heliostats - innovation, performance and adaptation to small-scaleapplications,� in Renewable and Sustainable Energy Conference (IRSEC),2014 International, Oct 2014, pp. 175�180.
[19] �ashearth, �http://www.�ashearth.com/,� 22 Fenrero 2015.
[20] R. F. F. C. A. Cadena, �Aprendizaje de sistemas basados en lÓgica difusa:AplicaciÓn al control de la pÉrdida de potencia de paneles fotovoltaicos.�
[21] F. R. Rubio and M. J. L. Sánchez, Control adaptativo y robusto. Univer-sidad de Sevilla, 1996, vol. 9.
[22] S. Dominguez, J. Sebastián, and P. Campoy, Control en el espacio de es-tado. Universidad Politécnica de Madrid, 2000.
[23] P. J. R. Torres, �Combustibles fosiles y contaminacion,� Universidad MilitarNueva Granada, 1999.
[24] E. B. Mundial. (2014) Consumo combusti-bles fosiles en colombia. [Online]. Available:http://datos.bancomundial.org/indicador/EG.USE.COMM.FO.ZS/countries/CO?display=graph
[25] J. L. D. Quesada and A. E. d. N. y Certi�cación, Huella ecológica y desa-rrollo sostenible. Asociación española de normalización y certi�cación ed.,2009.
[26] J. M. T. i Rodríguez, El origen del sistema solar. Editorial Complutense,2001.
[27] F. Nuclear, �http://www.foronuclear.org/consultas-es/consultas-al-experto/la-fusion-nuclear,� 2014.
[28] M. Stix, The Sun: And Introduction. Springer, 2004.
[29] E. B. Babatunde, �Solar radiation, a friendly renewable energy source,�1995.

BIBLIOGRAFÍA 67
[30] J. Tonda and A. R. Garcia, El oro solar y otras fuentes de energia. Fondode Cultura Economica, 1993.
[31] B. Kalman, La fotosintesis: de la luz del sol al alimento. Crabtree Publis-hing Company, 2007.
[32] J. Coello Guevara and P. Castro Pareja, �Biocombustibles, agua y agricul-tura en los andes,� Revista Virtual REDESMA, vol. 2, p. 117, 2008.
[33] J. Chassériaux, Conversión térmica de la radiación solar. Librería Agro-pecuaria, 1990.
[34] C. M. Rasero, �Energía solar fotovoltaica,� 2000.
[35] R. L. Boylestad and L. Nashelsky, Electrónica: teoría de circuitos y dispo-sitivos electrónicos. Pearson Educación, 2003.
[36] M. M. Vallina, Instalaciones solares fotovoltaicas. Editorial Paraninfo,2010.
[37] C. de Hoyos, Cuadrantes Solares. Universidad Metropolitana, 1985.
[38] F. L. Hector, Geometria Solar. Universidad Iberoamericana, 1985.
[39] M. Cli�ord and D. Eastwood, �Design of a novel passive solar tracker,�Solar Energy, vol. 77, no. 3, pp. 269�280, 2004.
[40] W. Batayneh, A. Owais, and M. Nairoukh, �An intelligent fuzzy basedtracking controller for a dual-axis solar pv system,� Automation inConstruction, vol. 29, no. 0, pp. 100 � 106, 2013. [Online]. Available:http://www.sciencedirect.com/science/article/pii/S0926580512001550
[41] D. Sinha and E. R. Dougherty, �Fuzzi�cation of set inclusion: theory andapplications,� Fuzzy sets and systems, vol. 55, no. 1, pp. 15�42, 1993.
[42] L.-X. Wang, Adaptive fuzzy systems and control: design and stability analy-sis. Prentice-Hall, Inc., 1994.
[43] W. Z. Qiao and M. Mizumoto, �Pid type fuzzy controller and parametersadaptive method,� Fuzzy sets and systems, vol. 78, no. 1, pp. 23�35, 1996.
[44] L.-X. Wang and J. M. Mendel, �Generating fuzzy rules by learning fromexamples,� Systems, Man and Cybernetics, IEEE Transactions on, vol. 22,no. 6, pp. 1414�1427, 1992.
[45] H. Hellendoorn and C. Thomas, �Defuzzi�cation in fuzzy controllers,� Jour-nal of Intelligent and Fuzzy Systems, vol. 1, no. 2, pp. 109�123, 1993.
[46] A. Ahmed and S. Khan, �Performance evaluation of solar panel and pro-posed new algorithm of solar tracking system,� in Green Energy and Tech-nology (ICGET), 2014 2nd International Conference on, Sept 2014, pp.9�13.

BIBLIOGRAFÍA 68
[47] C. L. Cárdenas Rojas et al., �Caracterización hidrológica y de calidad deagua para el río bogotá. tramo comprendido entre la con�uencia del ríoneusa hasta la intersección vía autopista norte cajicá,� 2013.
[48] J. Aguilera, L. Hontoria, and F. J. Muñoz, �Dimensionado de sistemasfotovoltaicos autónomos,� Fundamentos, dimensionado y aplicaciones dela energía solar fotovoltaica, vol. 2, 2007.
[49] D. R. R. y Carlos Bordons Alba, Apuntes de Ingenieria de Conrol, 2005.
[50] I. Landau, �A survey of model reference adaptive techniques theory andapplications,� Automatica, vol. 10, no. 4, pp. 353�379, 1974.
[51] A. A. Behar and M. A. M. Iranzo, Identi�cación y control adaptativo. Pear-son Educación, SA, 2002.
[52] S. Sastry and M. Bodson, Adaptive control: stability, convergence and ro-bustness. Courier Corporation, 2011.
[53] K. S. Narendra and K. George, �Adaptive control of simple nonlinear sys-tems using multiple models,� in Proceedings of the American control con-ference, 2002, pp. 1779�1784.
[54] K. J. AAstrom and B. Wittenmark, Adaptive control. Courier Corporation,2013.

ANEXOS
69

70

APÉNDICE A. CARACTERÍSTICAS PANEL SOLAR 71
Apéndice A
Características Panel Solar

72

APÉNDICE B. CARACTERÍSTICAS ACERO AISI 304 73
Apéndice B
Características Acero AISI304

74

APÉNDICE C. CARACTERÍSTICAS ACTUADOR LINEAL 75
Apéndice C
Características ActuadorLineal