international · gerente de circulaciÓn adrian holland diseÑo verheul media supporters bv, alphen...
TRANSCRIPT

I N T E R N A T I O N A L
Entrevista de
GIM International
Rodrigo Barriga-Vargas
Posicionamiento GNSS
Estatus y Características
UAS en los Andes
Determinando Cambios de
Volumen
UAS de Baja Velocidad
y Baja AltitudEntrelazando UAV y Software
EDIC IÓN 1 • VOLUMEN 1 • ABRIL DE 2014
L A R E V I S T A G L O B A L D E G E O M Á T I C AW W W . G I M - I N T E R N A T I O N A L . C O M
GIM0114spaans_Cover_nieuw 1 11-04-14 09:36:30

No2529
No
2557
GIM0114spaans_Cover_nieuw 2 11-04-14 09:36:39

XXXXXXXXXXXXXXXXEDITORIAL
3EDIC IÓN 1 2014 | INTERNATIONAL |
Geomares Publishing
Apartado de correos 112,
8530 AC Lem mer,
Holanda
T: +31 (0) 514-56 18 54
F: +31 (0) 514-56 38 98
www. gim-international.com
Ningún material puede ser reproducido
en su totalidad o en parte, sin permiso
escrito de Geomares Publishing.
copyright © 2014, Geomares
Publishing, Holanda
Todos los derechos reservados.
ISSN 1566-9076
Con gran placer y orgullo doy la bienvenida a esta primera edición de GIM International en español. GIM International ha estado presente como la principal fuente de información para la comunidad global de profesionales de la geomatemática con los últimos avances y noticias desde hace más de 25 años. Por primera vez en su historia, decidimos hacer una edición en lengua extranjera y cuál otra podría ser que español. El mundo de habla hispana es muy diverso y grande en sí mismo, con desafíos y oportunidades por igual y a un increíble ritmo de desarrollo, también en el campo de la geomatemática. En los últimos años, he conocido muchos lectores tanto de América Latina como de España, quienes me han dicho que existiría una gran demanda de una revista en su propio idioma. ¡Bueno, aquí está!Por lo cual, hemos planifi cado publicar GIM Internacional en español tres veces al año. En cada edición nuestro objetivo es brindarles una amplia gama de artículos y noticias, tanto de su propia región como de otras del mundo: Europa, Asia y
Australia. Queremos ser su nueva ventana geomatemática en el resto del globo. En este primer número publicamos una entrevista a Rodrigo Barrriga Vargas, el nuevo presidente del Instituto Panamericano de Geografía e Historia en México en la página 12. También, nuestro editor senior Mathias Lemmens da una visión de la última generación de GNSS en la página 16.Asimismo, se publica un artículo original de Eric Romersa y Olivier Küng sobre la aplicación de UAS en los Andes. Lomme Devriendt escribe un artículo sobre velocidad con diversos aspectos
de los UAS [página 30] y Wang Jian relata sobre el escaneo láser en una mina de oro en China [consulte la página 27]. Además, usted encontrará piezas editoriales de nuestro editor senior Mathias Lemmens y de John Trinder colaborador desde hace mucho tiempo, ex presidente de la Sociedad Internacional de Fotogrametría y Teledetección, así como profesor-emérito de la Universidad de New South Wales, Melbourne, Australia. Sin lugar a dudas, una amplia gama de artículos editoriales procedentes de todos los rincones del mundo, al igual que nuestra comunidad que es realmente global.Si se ha topado con este número y no es un suscriptor habitual, es posible recibir GIM Internacional en español a través de una suscripción en el futuro. Por favor, ingrese a www.gim-international.com y complete el formulario bajo el botón de suscripción. Si usted tiene alguna idea para artículos que se puedan incluir en uno de los próximos números o si usted desea dar su opinión o sugerencia, por favor no dude en contactarnos. Es importante para nosotros saber qué piensa.
Por ahora, les deseo felices lecturas y buenos negocios!
¡Bienvenidos!
Fotografía: Arie Bruinsma
DURK
HAA
RSM
AD
irec
tor
publ
icac
ión
durk
.haa
rsm
a@ge
omar
es.n
l
DIRECTOR PUBLICACIÓN Durk Haarsma
DIRECTOR FINANCIEROMeine van der Bijl
EDITOR SENIORDr Ir. Mathias Lemmens
EDITORES CONTRIBUYENTESDr Ir. Christiaan Lemmen, Dr Rohan
Bennett, Mark Pronk BSc, Martin Kodde
MSc
GERENTE EDITORIALWim van Wegen
CORRECTOR EDITORIALLynn Radford, Englishproof.nl
CONSEJO EDITORIALIr. Paul van Asperen, Dr Bharat Lohani
GERENTE DE CUENTASybout Wijma
ASISTENTE DE MARKETING Trea Fledderus
GERENTE DE CIRCULACIÓNAdrian Holland
DISEÑOVerheul Media Supporters BV,
Alphen aan den Rijn
www.vrhl.nl
CORRESPONSALES REGIONALESUlrich Boes (Bulgaria), Prof. Dr Alper
Çabuk (Turquía), Papa Oumar Dieye
(Nigeria), Dr Olajide Kufoniyi (Nigeria),
Dr Dmitry Kurtener (Rusia), Dr Jonathan
li (Canadá), Dr Carlos López (Uruguay),
Dr B. Babu Madhavan (Japón), Dr Wilber
Ottichilo (Kenia), Dr carl reed (EE.UU),
Dr Aniruddha Roy (India), Prof. Dr Heinz
Rüther (Sud África), Dr Tania Maria
Sausen (Brasil).
GIM0114spaans_Editorial 3 10-04-2014 14:53:12

No
2564
GIM0114spaans_Editorial 4 10-04-2014 14:53:13

CONTENIDOS
ÍNDICE DE AVISOS
5EDIC IÓN 1 2014 | INTERNATIONAL |
GIM INTERNACIONAL La edición en español del GIM
International es una publicación
hermana de GIM International, la revista
global en idioma Inglés para la
geomática. La versión en español se
publica cuatro veces al año y
proporciona una visión general de la
actualidad y con exactitud de las
últimas novedades en geomática, en
todo el mundo. GIM Internacional está
orientada a lectores profesionales y de
gestión, a aquellos líderes que toman
las decisiones, y ésta es distribuida en
eventos relevantes para los
profesionales de geomática.
ANUNCIOSInformación acerca de publicidad y
plazos están disponibles en el Media
Planner. Para obtener mayor
información, póngase en contacto con
nuestro gerente de cuenta:
CONTRIBUCIONES EDITORIALES Todo el material presentado a Geomares
Publishing y relacionado con GIM
International será tratado como
asignado incondicionalmente para
publicación bajo derecho de autor, sujeto
sin restricción al editor para editar y
brindar comentarios editoriales.
Geomares Publishing no asume ninguna
responsabilidad por el material no
solicitado o por la exactitud de la
información así recibida. Geomares
Publishing asume, además, que no está
obligado a devolver el material si no es
explícitamente requerido. Las
contribuciones deben ser enviadas para
consideración del gerente editorial:
ARTÍCULO PÁGINA 27
Minería digitalModelado 3D de una mina de oro usando escaneo láser
ARTÍCULO PÁGINA 30
UAS de baja velocidad y baja altitudEntrelazando UAV y software
NOTICIAS Y OPINIÓN PÁGINA
Visión Interna 6
Noticias 7
Punto de Conclusión 11
COLUMNAS PÁGINA
Editorial 3
Enfoque Tecnológico 34
ENTREVISTA PÁGINA 12
Amplia mirada de la GeoinformaciónEntrevista de GIM International a Rodrigo Barriga-Vargas
ARTÍCULO PÁGINA 16
Posicionamiento GNSSEstatus y Características
ARTÍCULO PÁGINA 23
UAS en los AndesDeterminando Cambios de Volumen en la Mina a Tajo
Abierto Chuquicamata, Chile
Proyecto piloto entre WSdata3D y Pix4D para el análisis volumétrico de pilas de óxido a través de curvas de nivel, así como de conciliación de los datos obtenidos con la planta de electroobtención en una de las mayores minas de cobre del norte de Chile.(FOTOGRAFÍA: WSDATA3D, PIX4D)
Aplitop, www.aplitop.com 26
Geo-allen, www.geoallen.com 22
Global Geo Supplies, www.softmouse3d.com 10
Hi-Target, www.hi-target.com.cn 2
KCS TraceMe, www.trace.me 18
KQ Geo, www.kqgeo.com 26
LidarUSA, ww.lidarusa.com 32
NavCom, www.navcomtech.com 4
Pix4D, www.pix4d.com 36
RIEGL, www.riegl.com 7
Satel, www.satel.com 22
Trimble, www.trimble.com/unmanned 35
GIM0114spaans_Contents 5 11-04-14 10:20:19

VISIÓN INTERNA Clic en
por más
noticiasGIM-INTERNATIONAL.COM
66 | INTERNATIONAL | ED IC IÓN 1 2014
CAEEl Consejo Asesor Editorial (CAE) de GIM International está formado por profesionales que, cada uno en su disciplina y con una visión independiente, asisten al comité editorial para recomendar sobre potenciales autores y tópicos específicos. El CAE sirve sin compromiso por dos años.
PROF ORHAN ALTANUniversidad Técnica de Estambul, Turquía
PROF DEREN LI Universidad de Wuhan, China
SR. SANTIAGO BORRERO Secretario General del Instituto Panamericano de Geografía e Historia (IPGH)
PROF STIG ENEMARKPresidente Honorario, FIG, Dinamarca
DR ANDREW U FRANK Decano, Instituto para la Geoinformación, Universidad Tecnológica de Viena, Austria
DR AYMAN HABIB, PENG Profesor y Jefe del Departamento de Ingeniería Geomática de la Universidad de Calgary, Canadá
DR GABOR REMETEY-FÜLÖPPSecretario General, Asociación Húngara para la Geoinformación (HUNAGI), Hungría
PROF PAUL VAN DER MOLEN Universidad de Twente, Holanda
PROF DR IR MARTIEN MOLENAAR Universidad de Twente, Holanda
SR JOSEPH BETIT Topógrafo Senior, Dewberry, EE.UU.
PROF SHUNJI MURAI Instituto de Ciencia Industrial, Universidad de Tokio, Japón
PROF DAVID RHIND Ret. Vicerrector, Universidad de la City de Londres, Reino Unido
PROF DR HEINZ RÜTHER Presidente de la Comisión Financiera ISPRS Universidad de Ciudad del Cabo, Departamento de Geomática, Sudáfrica
SR. FRANÇOIS SALGE Secretario General, CNIG (Consejo Nacional de Información Geográfica), Francia
SR DAVID SCHELL Presidente emérito, Consorcio Geoespacial abierto, Inc., EE.UU.
PROF DR TONI SCHENK Profesor de la Universidad Estatal de Ohio, Departamento de Ingeniería Civil y Ambiental, EE.UU.
PROF JOHN C TRINDER Primer Vicepresidente ISPRS, Escuela de Topografía y SIS, Universidad de Nueva Gales del Sur, Australia
SR ROBIN MCLARENDirector, Know Edge ltd
DE CASQUETE GLACIAR DEL MONT BLANC ++ INTERGEO 2014 ATRAE LA INDUSTRIA GEOMÁTICA A BERLÍN ++ MICROSOFT ANUNCIA LA VERSIÓN 2 DE ULTRACAM OSPREY ++ FOSS4G AMÉRIC
HEXAGON SE HACE CARGO DEL FABRICANTE DE UAV AIBOTIX ++ ASTRIUM SERVICES RENOMBRADOS COMO AIRBUS DEFENCE AND SPACE ++ BLACKBRIDGE TOMA 50 % DE PARTICIPACIÓN EN S
Teledetección de plantación de pinoLa cuantifi cación de la estructura forestal en plantaciones de coníferas se utiliza para muchos propósitos de manejo forestal, incluyendo la evaluación de la productividad y el volumen de madera en base a parámetros como el área basal, soporte de volumen y el almacenamiento de una vista local. Con el fi n de lograr este objetivo, tradicionalmente los supervisores forestales solían visitar las zonas boscosas para implementar medidas in situ. Hoy en día, las técnicas de teledetección son reconocidas como una alternativa efi caz a los métodos convencionales, que ocupan mucho tiempo y son costosos. Ahora que los sistemas satelitales avanzados se han desarrollado, hay nueva base de datos disponible obtenida por teledetección que pueden ser útiles para el mapeo de la estructura de las plantaciones de pino. Sin embargo, además de la precisión de la estimación requerida de información derivada de los datos obtenidos por teledetección, el presupuesto del proyecto y el precio del suministro de datos se debe considerar antes de seleccionar un conjunto de datos. Dado que la estructura de las plantaciones de pino es menos complejo que los bosques naturales, es posible que el precio sea más bajo y datos disponibles más fácilmente podrían proporcionar la precisión de la estimación requerida de los parámetros estructurales.
Fusión de imágenes satelitales ópticas y Lidar Para examinar esta hipótesis de datos lidar, SPOT-5 y WorldView-2 se han aplicado para cuantifi car la altura media, media DBH, volumen estándar, área basal, y la posesión de una plantación de Pinus radiata en NSW, Australia. Información de la textura de imágenes multiespectrales se extrajo, así como los atributos estadísticos de un modelo de altura de copas (CHM) derivado de lidar. Los datos derivados de cada base de datos de teledetección se analizaron por separado, así como en la fusión con otros usando regresión lineal múltiple por pasos. Los resultados mostraron que la altura media y la media DBH se puede estimar error con una estimación de menos de 20% usando cada dato de teledetección; Sin embargo, los datos LIDAR y WorldView-2, proveen signifi cativamente mejores estima-ciones de estos parámetros estructurales. Además, los errores de estimación aceptables son de 15% a 20% que se puede lograr para el volumen de soporte, área basal y media cuando los datos lidar se fusionan con cualquier WorldView-2 o datos de SPOT-5.
El costo puede determinar qué dato es utilizado Mientras lidar puede proporcionar muchos benefi cios adicionales de aplicación, tales como productos de alta resolución, Modelos Digitales de Terreno (DTM), los que son superiores a los proporcionados por los satélites ópticos, dado su costo de adquisición en la actualidad por sobre US$ 300 por km2 dependiendo de la extensión de la cobertura, junto con otras difi cultades relacionadas con la recopilación de datos lidar, se preferiría datos obtenidos por teledetección ópticos, especialmente para el mapeo de grandes áreas. En consecuencia, datos ortorectifi cados multiespectrales de 4 bandas SPOT-5, que es relativa-mente más barato en aproximadamente US$ 1 por km2 con franja más grande (60 × 60 km) en comparación con la de los datos WV-2, aproximadamente entre US$ 20 y US$ 30 por km2 (para ortorectifi cada multiespectrales de 8 bandas de imágenes) con menor franja (16,5 × 16,5 km) se debe preferir en base al costo, cuando se aplica la fusión de datos ópticos con datos Lidar para la estimación de parámetros de la estructura forestal de una gran plantación de pinos de una sola especie.
John Trinder y Ali Shamsoddini
GIM0114spaans_Nieuws+Endpoint 6 11-04-14 10:46:45

NOTICIAS
RIEGL LMS GmbH, Austria RIEGL USA Inc. RIEGL Japan Ltd.
www.riegl.com
RIEGL VZ-4000ESCÁNER LASER TERRESTRE 3D DE LARGO ALCANCE para escaneo con protección ocular y adquisición de datos con imágenes.
Destacados de RIEGL VZ-4000
Software Mineros Destacados
Alcance largo hasta 4000 m
Seguridad ocular de láser de Clase 1
Sensores de inclinación, receptor GPS y brújula integrada
Conector para receptor GNSS externo
Cámara incorporada
Interfaz HMI y almacenamiento de la data en une SSD para funcionamiento independiente
Capacidad para múltiples objetivos (resistencia excelente al polvo y vegetación)
Producción de los datos de onda (opcional)
WARESOFTRi
RiSCAN PRO adquisición eficiente de datos y registros
RiMTA 3D resolución automatizada de ambigüedades de distancia
RiMONITOR monitoreo de deformaciones del terreno mediante el análisis de los cambios de la superficie
RiMINING el registro de datos escaneados optimiza y simplifica y el proceso del flujo de trabajo en minas dev tajo abierto, ofreciendo por ejemplo, extracción automática de líneas de rotura, contornos, perfiles, y cálculo de volúmenes.
Con el Escáner Láser VZ-4000 y los paquetes de programas completos especialmente
diseñados, RIEGL ofrece una solución perfecta para el trabajo exigente de campo en minería de tajo abierto y topografía.
No
2540
7EDIC IÓN 1 2014 | INTERNATIONAL |
MÉRICA HACE LLAMADO PARA TALLERES E ARTÍCULOS ++ COWI
N EN SANTIAGO & CINTRA CONSULTORIA ++ SCANEO 3D EXACTO
Scaneo 3D exacto de casquete glaciar del Mont Blanc Agrimensores alquilados situados en Francia, así como dos topógrafos de Leica Geosystems Francia, han llegado a la cima del Mont Blanc, uno de los picos más altos de Europa. Por su séptima expedición, que decidieron hacer la primera exploración láser 3D de la forma y el volumen del pico legendario utili-zando Leica Nova MS50 MultiStation. http://bit.ly/1l0VLOp
Leica Nova MS50 escanea la capa de hielo del
Mont Blanc.
Blackbridge Toma 50 % de partici-pación en Santiago & Cintra ConsultoriaBlackbridge ha comprado 50% de la compañía líder geoespacial de Brasil, Santiago & Cintra Consultoria (SCC). Juntos, Blackbridge y SCC tienen como objetivo expandir sus ofertas existentes y hacer crecer su base de clientes mutuos mediante el aprove-chamiento de sus activos combi-nados, el conocimiento y la fuerte posición en el mercado. http://bit.ly/1hr7uVW
GIM0114spaans_Nieuws+Endpoint 7 11-04-14 10:46:46

Clic en
por más
noticiasGIM-INTERNATIONAL.COM
88 | INTERNATIONAL | ED IC IÓN 1 2014
CÁMARA AÉREA IXU 150 ++ ENCUESTA DE GRADO LIDAR SENSOR PARA UAS ++ MAPEADO INTEGRADO Y SOLUCIÓN DE MODELADO PARA TRIPULADO AERONVES HEXAGON SE HACE CARGO DE
MAPEA GLACIAR DE GROENLANDIA CON UAV ++ DOS NUEVOS SISTEMAS LIDAR AEROTRANSPORTADOS TRIMBLE ++ EMBAJADA BRITÁNICA ES SEDE DE FORO DE ESCANEO LÁSER EN CHILE ++ S
Sensores de imagen Traen Visión por Computador a Proyecto Tango de GoogleOmniVision, un innovador líder de avanzadas soluciones de imagen digital, está trabajando con la Tecnología y Proyectos ( ATAP ) del equipo avanzado de Google para desarrollar dispositivos móviles basados en la visión innovadora capaz de rastrear y mapear y captar el
movimiento en 3D de entornos. Como parte de la colaboración, los nuevos sensores de imagen OV4682 y OV7251 de OmniVision proporcionan funciones de imagen de alto rendimiento para kit de teléfono inteligente y el desarrollo basado en proyecto de Android. http://bit.ly/1mxUpxM
Nueva OV4682 de OmniVision.
FOSS4G América hace llamado para Talleres e ArtículosEl comité organizador FOSS4G ha publicado una convocatoria de ponencias, talleres y artículos académicos. FOSS4G, que se celebrará del 8 a 12 septiembre de 2014 en Portland, Oregon, EE.UU., es una conferencia internacional líder en tecnologías geoespaciales de código abierto. Con dos días de talleres, seguidos de tres días de presentaciones y artículos académicos, FOSS4G cuenta con una diver-sidad de asistentes y participantes que abarcan el mundo académico, la industria y el gobierno. http://bit.ly/1hr97mK
Microsoft anuncia la versión 2 de UltraCam OspreyEn la conferencia de ASPRS de este año en Louisville, Kentucky, EE.UU., la unidad de negocios UltraCam de Microsoft ha introducido una versión actualizada del UltraCam Osprey, un sistema de antena digital que combina una cámara fotogramétrica nadir de alto rendimiento con capacidades de captura de imágenes oblicuas. http://bit.ly/1l0Usz5
UltraCam Osprey.
Hexagon se hace cargo del fabricante de UAV AibotixEl grupo Hexagon de Suecia se ha hecho cargo de Aibotix, una empresa especializada en el desarrollo de robots voladores con sede en Kassel, Alemania. Hexagon es un proveedor global líder de tecnologías de diseño, medición y visualización integrada, con Leica Geosystems e Intergraph también perteneciente al Grupo Hexagon. La toma de posesión es un claro reconocimiento a la creciente importancia de los UAV en el sector de la geomática. http://bit.ly/1bhYpOK
Aibot UAV X6 en el Oldenburger
3D-Tage, Alemania.
Mapeado integrado y solución de modelado para Tripulado AeronvesWaldoAir, EE.UU., y Pix4D, Suiza, han anunciado el lanzamiento de un sistema de cámara integrada para su uso en aeronves de un solo motor incluido con el software de procesa-miento de imágenes aéreas. Este completo sistema ofrece a la industria de las aeronaves tripuladas las mismas ventajas tecnológicas de mapeo y modelado que ha sido introducida a la industria de UAV en los últimos dos años, rápida y rentable. http://bit.ly/QbPlC4
GIM0114spaans_Nieuws+Endpoint 8 11-04-14 10:46:46

NOTICIAS
9EDIC IÓN 1 2014 | INTERNATIONAL |
GO DEL FABRICANTE DE UAV AIBOTIX ++ ASTRIUM SERVICES RENOMBRADOS COMO AIRBUS DEFENCE AND SPACE ++ BLACKBRIDGE TOMA 50 % DE PARTICIPACIÓN EN SANTIAGO & CINTRA
++ SENSORES DE IMAGEN TRAEN VISIÓN POR COMPUTADOR A PROYECTO TANGO DE GOOGLE ++ DEBUT DE UAV GPS- MENOS LIDAR SISTEMA DE TOPOGRAFÍA Y MAPEO ++ PHASE ONE LANZA
COWI Mapea Glaciar de Groenlandia con UAVCOWI ha utilizado su UAV para mapear un glaciar 150 kilómetros al noreste de Nuuk, Groenlandia, con el fi n de comprobar si los vehículos aéreos no tripulados pueden ser utilizados como una alternativa a los satélites y aviones cuando mapean glaciares. El mapeo de prueba se llevó a cabo para que la DTU SPACE active la asignación diaria de la geometría del fi lo glaciar, con el propósito de estudiar la aplicabilidad de la tecnología de UAV en el monitoreo de los glaciares. http://bit.ly/1l0VzyM
Prueba de mapeo de UAV en Groenlandia.
Intergeo 2014 atrae la Industria Geomática a BerlínIntergeo, la principal conferencia y feria comercial para la geodesia, geoinformación y gestión de la tierra, es el regreso a la capital alemana por su vigésimo aniversario. Rodeado por la embriagadora mezcla de la política, las organizaciones y los medios de comunicación encontraron allí, la plataforma de la geomática está dirigiendo su atención en primer lugar a aquellas preguntas que plantea la creciente digitalización de las infrae-structuras modernas. Ambas áreas urbanas y rurales pueden benefi ciarse de las soluciones de geoinformación inteligentes. http://bit.ly/QbRDBe
Brandenburger Tor.
Encuesta de grado Lidar Sensor para UASRIEGL Laser Measurement Systems ha estado desarrollando su primer sensor de encuesta de grado UAS Lidar, el vux - 1. El innovador sensor fue diseñado para cumplir con los retos de soluciones topográfi cas emergentes por UAS, girocópteros y aviones ultra-ligero, tanto en la medición del desempeño y en la integración de sistemas. http://bit.ly/1dL94Rl RIEGL VUX-1.
CAPIGI 2014: Conexión de Agricultura y Geomática La conferencia CAPIGI 2014 se realizó, entre el 2 y 4 de abril de 2014, en Amsterdam, Holanda. Esta demostró ser un evento de primer nivel con desafi antes debates y una excelente oportu-nidad para establecer una red de contactos. Brindando a los participantes de los cuatro grupos interesados (agricultura, ciencia, empresas privadas y gubernamentales) una posibilidad interesante de mezclar diversos puntos de vista sobre el uso de la información geoespacial, y en particular sobre cómo se puede aplicar para mejorar la agricultura. http://bit.ly/1gPsQIr
Dinámico debate en
CAPIGI 2014.
GIM0114spaans_Nieuws+Endpoint 9 11-04-14 10:46:47

Clic en
por más
noticiasGIM-INTERNATIONAL.COM
TM
No
2526
1010 | INTERNATIONAL | ED IC IÓN 1 2014
CONSULTORIA ++ SCANEO 3D EXACTO DE CASQUETE GLACIAR DEL MONT BLANC ++ INTERGEO 2014 ATRAE LA INDUSTRIA G
GROENLANDIA CON UAV ++ DOS NUEVOS SISTEMAS LIDAR AEROTRANSPORTADOS TRIMBLE ++ EMBAJADA BRITÁNICA ES SE
Se han anunciado dos nuevos Sistemas Lidar aerotransportados TrimbleTrimble ha añadido dos nuevas adiciones a su portafolio Lidar aerotransportado. El Trimble AX60i y AX80 se han desarrollado para satisfacer las demandas de los opera-dores de reconocimiento aéreo para proyectos de corredores y cartografía de área amplia. Los nuevos sistemas de a bordo, así como la planifi cación y análisis de las
herramientas de software de vuelo, han sido diseñados para proporcionar un rápido y efi caz punto de captura de nubes, así como imágenes de alta resolución y los fl ujos de trabajo probados con una alta productividad. Los sistemas se pueden instalar tanto en aeronaves de ala fi ja o rotatoria. http://bit.ly/1hrb3LO
Sistema Lidar de doble canal Trimble AX80.
Debut para UAV Lidar con menos-GPS para Sistema de Topografía y MapeoTecnología Lidar, fotogrametría y otros sensores continúan revolucionando las industrias de topografía y mapeo, y el mundo es ahora un hervidero de cómo los UAV y vehículos no tripulados pueden tener cabida en el futuro en estas industrias. Pero sólo en los últimos años ha sido la tecnología de sensor reducido lo sufi ciente en términos de tamaño y peso para ser considerado para plataformas UAV. Ahora es posible capturar datos de nubes de un UAV Lidar equipado y producir resultados de entorno 3D, procesados sin necesidad de GPS y otros sensores. http://bit.ly/QbOCRv
XactMaps UAV.
Embajada Británica es sede de foro de escaneo láser en ChileLa Embajada Británica en Chile ha sido sede de un escaparate de las últimas novedades y las innovaciones técnicas en escaneo láser. Organizado a través de UK Trade and Investment, el foro contó con demostraciones del escaneo láser de monitorización del sistema SiteMonitor así como del móvil portátil ZEB1 sistema de mapeo láser rápido. Con el apoyo de los sistemas de mapeado Laser 3D y SiteMonitor del Reino Unido, así como de especialistas locales en topografía GeoCOM , el evento de un día se realizó el 25 de marzo de 2014 en Santiago. http://bit.ly/1hrcY3g
GIM0114spaans_Nieuws+Endpoint 10 11-04-14 10:46:51

PUNTO DE CONCLUSIÓNNOTICIAS
11EDIC IÓN 1 2014 | INTERNATIONAL |
TRIA GEOMÁTICA A BERLÍN ++ MICROSOFT ANUNCIA LA VERSIÓN 2 DE ULTRACAM OSPREY ++ FOSS4G AMÉRICA HACE LLAMADO PARA TALLERES E ARTÍCULOS ++ COWI MAPEA GLACIAR DE
ES SEDE DE FORO DE ESCANEO LÁSER EN CHILE ++ SENSORES DE IMAGEN TRAEN VISIÓN POR COMPUTADOR A PROYECTO TANGO DE GOOGLE ++ DEBUT DE UAV GPS- MENOS LIDAR SISTEMA
Esta primera edición de GIM International en idioma español principalmente dirigida a la tecnología de adquisición de datos geográfi cos, en particular GNSS, sistemas aéreos no tripulados (UAS) y escaneado láser terrestre (TLS). Los GNSS han avanzado mucho desde el lanzamiento de receptores GPS al mercado en 1982 – en su parte interna han evolucionado a partir de circuitos eléctricos potentes en tableros de partículas ligeras conectados a una antena de tamaño-palma.Estos receptores multicanal, multi - frecuencia y multi- constelación están conectados de forma inalámbrica a los sistemas de aumentación basados en tierra y por satélite (GBAS y SBAS) para permitir precisión-dm utilizando diferencial GNSS (DGNSS) o precisión-cm utilizando Posicionamiento Cinemática en Tiempo Real (RTK) o Red RTK.Para el 2020, habrá cuatro sistemas GNSS completamente operativos con cobertura mundial: el europeo Galileo y el chino Compass que se han unido al estadounidense GPS, y el ruso Glonass que está en pleno funcionamiento. Los más de 120 satélites trans-mitirán al menos dos señales cada uno. Las cuatro constelaciones no son rivales como el
tándem explota el excedente de las señales mejorará la precisión en los corredores urbanos, bajo el dosel y otros lugares donde las señales se bloquean (ver página 16).UAS dirigidos para mapeo están en uso desde hace algún tiempo y se componen de una aeronave, una estación de control de tierra (GCS), sensores de navegación a
bordo, enlace de radio para control manual de la aeronave, sensores de recolección de uno o más geo- datos y una red inalámbrica de enlace para la transmisión de todos los datos en la GCS y PC, computador portátil o tablet.
Por lo general, la aeronave - ya sea de ala fi ja o rotatoria - estará propulsada por un motor eléctrico. Para mapeo e inspección una cámara de alta resolución RGB, un sistema Lidar, una cámara de infrarrojo cercano - o térmica, una grabadora de vídeo o una combinación de
estos sensores estarán a bordo.El control de la aeronave se realiza mediante un piloto quien permanece con ambas botas en tierra usando un enlace radial, pero la tendencia es hacia una orientación plenamente autónoma. La cual tiene un computador a bordo alimentado por las entradas del sensor que tiene el control total y no el hombre con las botas.Pero éste último permanecerá en contacto visual con la aeronave, ya que siempre surge algo inesperado, como viento repentino pesado, quedarse sin energía o frente a un encuentro cercano con otro objeto (volador).Romersa y Küng utilizaron el ala fi ja SenseFly eBee, equipada con una cámara Canon Ixus 125HS 16MP, para crear un modelo digital de superfi cie (DSM) en la mina de cobre más grandes del mundo a tajo abierto ubicada en los Andes al norte de Chile (página 23). De una serie temporal de imágenes, un DSM con un GSD de 14cm se creó para el cálculo de volumen de extracción del mineral. La precisión es similar a TLS, que ha demostrado ser la mejor herramienta para los sitios mineros donde el acceso es limitado debido a las restricciones de seguridad o condiciones muy duras. Jian Wang y colaboradores utilizaron TLS para escanear 20 km de los túneles principales de una mina de oro (página 27). Este fue el primer uso de TLS para el modelado 3D de una mina subterránea en China.
Aerotransportado: Aún con ambas botas en tierraPhase One lanza cámara aérea IXU 150 Phase One ha presentado su nueva cámara digital aérea integrada de formato medio. La IXU 150 está construida con un sensor de 50MP CMOS que ofrece 8.280 píxeles cobertura perpendicular a la derrota. El sensor ofrece 68 por ciento más de área de captura de la sonda en cualquier 35mm DSLR de fotograma completo. Capturas de calidad, ahora son posibles a través de su gama completa de ISO 100 a 6400, a una tasa de captura de 0,8 segundos por fotograma. Su peso ligero y tamaño compacto hacen que sea muy adecuado para la integración de UAV, mapeo y múltiples confi gura-ciones de la cámara para oblicua o la cobertura amplia con disparador sincronizado. http://bit.ly/QbOLEz
Astrium Services renombrados como Airbus Defence and SpaceAstrium Services, el proveedor global de soluciones satelitales-permitidas, ha anunciado que operará con efecto inmediato bajo su nuevo nombre de Airbus Defence and Space, una división del Grupo Airbus. El cambio de nombre de Astrium Services al nuevo, Airbus Defence and Space, es parte de un cambio de nombre a lo largo de toda la organización de EADS. A principios de este año, EADS Airbus se convirtió en Grupo, con tres divisiones distintas: Airbus, Airbus Defence and Space, and Airbus Helicopters. http://bit.ly/1dL8uTK
Cámara aérea IXU 150.
MAT
HIAS
LEM
MEN
S Ed
itor
sen
ior,
GIM
Inte
rnat
iona
l
mat
hias
.lem
men
s@ge
omar
es.n
l
GIM0114spaans_Nieuws+Endpoint 11 11-04-14 10:46:53

| INTERNATIONAL | E D I C I Ó N 1 2 0141212
Amplia mirada de la Geoinformación
ENTREVISTA DE GIM INTERNACIONAL CON RODRIGO BARRIGA-VARGAS
Rodrigo Barriga-Vargas no es sólo uno de los ingenieros geógrafos con mayor conocimiento en esta área, sino que también gracias a su vasta experiencia ha obtenido altos cargos. Desde su posición hace un balance sobre la importancia que está teniendo esta disciplina en el mundo, del optimismo acerca del crecimiento de la industria y de los nuevos desafíos que se deben adoptar hacia el futuro.
GIM0114spaans_Interview 12 10-04-2014 14:03:44

ENTREVISTA
EDIC IÓN 1 2014 | INTERNATIONAL | 13
POR DURK HAARSMA, DIRECTOR PUBLICACIÓN, GIM INTERNATIONAL
Para nuestros lectores de América Latina que no están familiarizados con su trabajo en el IPGH ¿puede explicar en qué consiste el Instituto Panamericano de Geografía e Historia en donde usted es Secretario General?El IPGH fue fundado el 7 de febrero de 1928, durante la Sexta Conferencia Internacional Americana celebrada en La Habana, Cuba, y desde 1930 su sede está en la Ciudad de México gracias al gentil ofrecimiento del Gobierno de ese país. Debido al permanente interés de servicio a la comunidad panamericana, el IPGH en 1949 se hizo parte del Sistema Interamericano con la suscripción de un convenio con la Organización de los Estados Americanos (OEA), siendo ratifi cado y formalizado en mayo de 1974 en el marco del denominado Protocolo de Buenos Aires, con lo cual se norman las relaciones entre ambas entidades. De esta forma el Instituto, en sus 86 años de existencia, se ha caracterizado por ser una entidad que desde sus inicios ha estado al servicio de nuestra región; con un pasado técnico e institucional se ha venido transformando en un organismo relevante en el acontecer panamericano a través del fomento, coordinación y difusión de estudios cartográfi cos, geográfi cos, históricos, geofísicos y de sus ciencias afi nes de interés para América, actividades que realiza mediante su programa de asistencia técnica, de las publicaciones periódicas y ocasionales así como mediante la red profesional de especialistas panamericanos.
¿Cuáles son sus antecedentes profesionales?En primer término puedo decir que poseo estudios formales en los ámbitos de la geografía e ingeniería geográfi ca realizados en Chile y en otros países, por lo cual durante prácticamente los últimos 25 años me he desempeñado en puestos ligados a estas temáticas, me ha correspondido coordinar una gran variedad de actividades técnicas en sus diversas fases, en aspectos de planifi cación,
ejecución y su respectiva gestión. Es así como he dirigido proyectos de tipo geodésico con actividades de terreno en lugares de difícil acceso (por ejemplo en el Territorio Antártico Chileno y zona insular austral de Chile, entre otras), también he tenido a mi cargo la coordinación y planifi cación de proyectos cartográfi cos y fotogramétricos, entre otros temas, además me correspondió impulsar la implantación del Sistema de Gestión de Calidad del proceso cartográfi co en el Instituto Geográfi co Militar de Chile. Todas las anteriores actividades las he combinado con funciones docentes como profesor en distintos centros de educación superior en Chile, como lo es la Academia Politécnica Militar, la Universidad Bernardo O´Higgins y la Universidad Tecnológica Metropolitana, por mencionar algunas.
Estoy vinculado con el IPGH desde hace casi 20 años a través de mi participación en diversas instancias, entre éstas como Presidente del Grupo de Trabajo II “Datum Geodésico” del Proyecto SIRGAS, también he ocupado varios cargos en la Comisión de Cartografía del Instituto, como miembro principal de Chile, Vicepresidente y Presidente a nivel panamericano de esta Comisión. Asimismo en mi calidad de Director del Instituto Geográfi co Militar de Chile asumí el cargo de Presidente de
la Sección Nacional del IPGH en Chile y simultáneamente Vicepresidente de CP-IDEA (ahora UN-GGIM: Américas) y desde febrero del año en curso como Secretario General de este Instituto.
Su antecesor mencionó que la geomática en América Latina todavía era incipiente. ¿Usted está de acuerdo con Santiago Borrero en este aspecto? en general y desde su punto de vista ¿en qué estado se encuentra la geomática en América Latina?Es muy probable que cuando Santiago fue consultado sobre este tema, esa haya sido la situación, no obstante en mi opinión la región está teniendo un signifi cativo avance en los últimos años, generándose una serie de oportunidades de desarrollo en el ámbito de la geoinformación, es así como podemos evidenciar que en distintos niveles se están empleando aplicaciones de este tipo, tanto en los ámbitos público, privado y académico. No obstante, estimo que debemos avanzar más en la disponibilidad de un mayor conjunto de datos territoriales que puedan ser compartidos entre los múltiples usuarios para así generar nuevo conocimiento relevante en benefi cio de los habitantes de la región panamericana, toda vez que la tecnología y la normativa especializada ya están disponibles, para lo cual será necesario estimular la respectiva inversión e investigación en estos campos.
Rodr
igo
Barr
iga-
Varg
as
Rodrigo Barriga-Vargas es Secretario General del Instituto Panamericano de
Geografía e Historia (IPGH), posee estudios formales y experiencia profesional
en los ámbitos de la geografía e ingeniería geográfi ca, asimismo como docente
en universidades y centros de educación superior en Chile. Durante los últimos
25 años se ha desempeñado en funciones relacionadas con su especialidad en
organismos chilenos, especialmente en el Instituto Geográfi co Militar, donde
fue su Director entre 2007 y 2008. Su vinculación con el IPGH desde hace 20 años, habiendo
ocupado puestos tanto en la Sección Nacional de Chile del IPGH, como en la Comisión de
Cartografía y en el Sistema de Referencia Geocéntrico para las Américas (SIRGAS).
GIM0114spaans_Interview 13 10-04-2014 14:03:47
| INTERNATIONAL | E D I C I Ó N 1 2 0141414
Y más específi co ¿cuál es su opinión respecto al desarrollo del catastro? (y por lo tanto de la agrimensura) ¿Nos puede mencionar algunos ejemplos representativos del estado en que se encuentra el catastro en América Latina?El Instituto no tiene un programa específi co referido al catastro como tal, sin embargo en su planifi cación estratégica orientada a través de la “Agenda Panamericana del IPGH”, defi ne como prioritarios los estudios relacionados con el cambio climático, efectos de los desastres naturales y ordenamiento territorial, es entonces en este último aspecto donde tienen cabida los conceptos referidos al catastro. De acuerdo con nuestra experiencia como Instituto, se puede decir que la situación de los catastros en América Latina está principalmente enfocada a los temas fi scales de defi nición legal de la propiedad y de contribuciones por impuesto territorial. Sin perjuicio de esto y asociado al desarrollo de las Infraestructuras de Datos Geoespaciales de los países, actualmente se están generando nuevas iniciativas que además de incluir los conceptos de propiedad podrían avanzar en la defi nición de un catastro multifi nalitario, que contribuya no solamente a incrementar la efi ciencia de la recaudación de impuestos territoriales, sino también en aspectos que permitan mejorar la planifi cación territorial de manera integral.
Como muestra puedo mencionar la iniciativa regional denominada “Apoyo OEA al Catastro de las Américas” en la cual, la Organización de los Estados Americanos pretende que sus Estados Miembros mejoren sus bases de datos georreferenciadas de catastro y registro de la propiedad, no solamente para fi nes relacionados con la recaudación de impuestos y planifi cación, sino también para mejorar la relación entre los ciudadanos y el Estado.
Otro ejemplo es el caso de Chile, donde la Infraestructura de Datos
Espaciales, que nació al alero de la División de Catastro del Ministerio de Bienes Nacionales, busca entre sus principales aspectos generar nueva información territorial, mejorando el acceso y uso de la información existente, para así propender a la interoperabilidad y acceso a los datos geoespaciales con fi nes orientados al desarrollo.
¿Cómo espera que sea el desarrollo del mercado en América Latina en el futuro inmediato? ¿Crecerá o habrá una disminución del mercado para la industria? Si usted considera que crecerá ¿en qué regiones se observará este crecimiento? El crecimiento que se observe ¿dependerá en gran medida del crecimiento económico?En este sentido soy bastante optimista, creo que se producirá una especie de círculo virtuoso entre el crecimiento económico y la necesidad de utilizar aplicaciones geoinformáticas, las que serán demandadas, pero que a su vez generarán nuevas oportunidades de negocios, esto en un amplio rango de aplicaciones en que la información territorial será cada vez más requerida. Estos procesos estarán asociados obviamente a factores de crecimiento en diversas áreas de la economía, pero también a necesidades de protección y gestión ambiental, como parte de las exigencias del comercio internacional y las relacionadas a la responsabilidad social empresarial cada vez más vigentes.
Se podrá observar la necesidad de contar cada vez más con un “inventario territorial” condicionado a las respectivas aplicaciones, en el cual se pretenderá incluir el máximo de información relevante que, de manera oportuna, pueda contribuir al éxito de la respectiva organización. Actualmente, se observan varios ejemplos en la región en donde los Estados están realizando esfuerzos para integrar diversas fuentes de datos en temas como sistemas de manejo y prevención de emergencias,
naturales o por causas humanas, así como en temas de gobierno electrónico.
Las aplicaciones en la economía continuarán abarcando los respectivos campos de interés, desde la extracción de recursos naturales (renovables y no renovables), pasando por aplicaciones de empresas de servicios (transporte, telecomunicaciones, electricidad, combustibles, logística, entre otras), hasta requerimientos de la banca, seguros y numerosas aplicaciones requeridas por particulares.
En algunos países de la región es común que se utilicen medios de localización instantánea para conocer la situación de tránsito y/o tiempo de arribo de algún medio de transporte, así como para tener antecedentes de ubicación territorial para defi nir el uso del suelo urbano para iniciar una actividad económica.
¿Se ha fi jado una tarea especial para los próximos años? ¿Qué logros lo harían sentirse orgulloso de ejercer como Secretario General del IPGH?La principal tarea es continuar con la implementación de la “Agenda Panamericana del IPGH” proponiendo oportunamente acciones para materializar las distintas iniciativas, dando el debido seguimiento a su ejecución de tal forma que permita continuar el proceso de consolidación del IPGH como un organismo técnico especializado al servicio de la comunidad panamericana en los campos de la geografía, historia, geofísica y cartografía, buscando además contribuir a mejorar el conocimiento especializado para benefi cio de los Estados Miembros, pero de manera muy importante y principalmente para que éste sea un aporte para mejorar la calidad de vida de las personas.
En este contexto será muy importante aunar esfuerzos con otros organismos internacionales
GIM0114spaans_Interview 14 10-04-2014 14:03:48

ENTREVISTA
EDIC IÓN 1 2014 | INTERNATIONAL | 15
para trabajar de forma coordinada para alcanzar metas comunes, teniendo como eje la citada Agenda Panamericana, especialmente en la formulación de proyectos regionales de cooperación técnica en los ámbitos de cambio climático, los desastres naturales y el ordenamiento territorial. De tal manera que se fortalezcan las relaciones que vinculan al Instituto con las acciones que realizan especialmente los órganos del Sistema Interamericano para reforzar los principios de desarrollo e integración regional.
Aunado a lo anterior, sería importante consolidar el sistema de publicaciones periódicas del Instituto dando pasos concretos para que en el futuro cercano se logre indexar alguna de éstas en los principales índices de la región, lo que daría un
espacio para la difusión de nuestros proyectos que serviría de mejor manera a la comunidad científi ca panamericana.
¿Observa usted algún desarrollo específi co en América Latina que sea de interés aprender o aplicar para el resto del mundo?Me parece que la iniciativa relacionada con la implementación del “Plan de Acción Conjunto para acelerar el desarrollo de la Infraestructura de Datos Espaciales de las Américas”, donde participan SIRGAS, el Programa GeoSUR de la CAF - Banco de Desarrollo de América Latina, el Comité Regional de las Naciones Unidas sobre la Gestión Global de Información Geospacial para las Américas (UN-GGIM: Américas) y el IPGH, constituyen un desarrollo importante en el ámbito
internacional, en el que existe un alto grado de interés por avanzar de manera coordinada, armonizando los respectivos esfuerzos y planes de trabajo para propiciar la especialización, evitar duplicaciones y preparar a las instituciones relevantes para los continuos cambios tecnológicos e innovaciones que se dan en este campo del desarrollo.
Este Plan de Acción Conjunto considera consolidar el rol del IPGH como facilitador clave de procesos regionales y como constructor de capacidades que corresponden a la naturaleza de sus Comisiones (Cartografía, Historia, Geografía y Geofísica); la función de SIRGAS como generador indiscutible del marco de referencia geodésica para la región; UN-GGIM: Américas como gestor de políticas regionales e institucionales y como vínculo directo con el sistema de la Organización de las Naciones Unidas y de GeoSUR como desarrollador de servicios y aplicaciones a partir de las bases de datos geoespaciales institucionales y regionales.
¿Algún mensaje que desee compartir con los lectores de GIM International, especialmente de América Latina?Reiterar el compromiso de servicio a los intereses de cada uno y todos los Estados Miembros del IPGH, para lo cual continuaremos con los esfuerzos desde una perspectiva que considere de manera amplia los campos de acción que defi nen a este Instituto, mediante la historia, la geografía, la geofísica y la cartografía, con una perspectiva científi co-tecnológica orientada a cumplir con un programa de asistencia técnica multidisciplinario, que contribuya a la generación de capacidades y que propenda al fortalecimiento institucional de los organismos especializados vinculados con el Instituto, así como fomentar la incorporación de nuevos talentos y generar nuevos vínculos con organismos académicos, públicos y privados.
GIM0114spaans_Interview 15 10-04-2014 14:03:48
| INTERNATIONAL | E D I C I Ó N 1 2 0141616
Posicionamiento GNSS
ESTATUS Y CARACTERÍSTICAS
Para el 2020, habrá cuatro sistemas GNSS completamente operativos con cobertura mundial: el europeo Galileo y el chino Beidou (Compass) que se han unido al estadounidense GPS, que desde julio de 1995 está plenamente operativo, y luego el ruso Glonass que ha sido fi nalizado
septiembre de 2010. Una vez fi nalizada esta operación, la constelación estará formada por tres satélites.
GALILEO Y BEIDOUEl 28 de diciembre de 2005, el satélite Giove A de Galileo fue puesto en órbita, seguido el 27 de abril de 2008 por el Giove B. El 21 de octubre de 2011, dos satélites de Capacidad Operativa Inicial (IOC) comenzaron a funcionar y, en el momento de redactar este
Mathias Lemmens tiene un Ir. (MSc)
licenciatura en geodesia y recibió su
doctorado en la Universidad Tecnológica
de Delft, Holanda, donde actualmente se
desempeña como profesor asistente.
Trabaja como consultor internacional
centrado en los países emergentes
y en desarrollo. Fue editor en jefe de
GIM International durante 10 años y ahora contribuye
como editor senior.
Actualmente, los receptores GNSS (Sistema Global de Navegación por Satélite) tienen decenas – e incluso cientos – de canales, que les permiten realizar un seguimiento de señales GPS, Glonass, Galileo y Compass simultáneamente. El rastreo de las señales satelitales para el cálculo de las coordenadas de la posición en un sistema de referencia seleccionado puede ser efectuado automáticamente en tiempo real. Desde que los primeros receptores GPS salieron al mercado comercial en 1982, el precio de estos dispositivos ha disminuido constantemente a través del tiempo. En relación con los resultados de la encuesta más reciente de productos GNSS (disponible en www.geo matching.com), el autor presenta las características de los receptores GNSS disponibles y su proyección futura.
y entró en pleno funcionamiento en Octubre de 2011. Mientras tanto, en India y Japón están trabajando en la operación de constelaciones GNSS regionales. El sistema indio consistirá en siete satélites que operarán hasta 2.000 km en torno a las fronteras del subcontinente y que permitirá el posicionamiento con una precisión superior a 20 m. Por otra parte, Japón está trabajando en el Sistema Quasi-Zenith por Satélite (QZSS) diseñado para superar los errores de posicionamiento, producidos por señales GNSS alteradas por edifi cios en altura en ciudades o por montañas empinadas. Los satélites QZSS circularán en una órbita cercana al zenit sobre Japón, lo cual incrementará el número de satélites GNSS en la línea visible en las inmediaciones de Japón (Figura 1). El primer satélite, Michibiki, fue lanzado el 11 de
ENCUESTA DE PRODUCTO PARA RECEPTORES GNSSConjuntamente con este artículo sobre
el estatus y las características de los
GNSS, la encuesta de producto más
reciente para receptores GNSS se
encuentra disponible en
www.geo-matching.com.
GIM0114spaans_Lemmens 16 10-04-2014 13:49:22

E D I C I Ó N 1 2 014 | INTERNATIONAL | 17
POR MATHIAS LEMMENS, EDITOR SENIOR, GIM INTERNATIONAL ARTÍCULO
documento (a mediados de septiembre de 2012), el segundo par de satélites Galileo se estaba preparando para su lanzamiento en octubre de 2012. Estos cuatro satélites de validación en órbita han sido diseñados para evaluar el desempeño del sistema, tanto para el espacio como en tierra. La constelación completa constará de 30 satélites (27 operativos y 3 activos de repuestos). Desde el año 2000 al 2007, China lanzó cuatro satélites de navegación, llamados BeiDou-1. A diferencia de sus predecesores, el quinto satélite – lanzado el 12 de abril 2007 - no fue posicionado en una órbita geoestacionaria a 35.800 kilómetros de la superfi cie de la tierra, sino que orbita en círculos a una altitud de 21.500 km. En el 2009, esta constelación Beidou-2 o Compass se extendió con un segundo satélite; en el 2010 cinco satélites más fueron incorporados, seguidos posteriormente por otros tres en 2011, dando como resultado que Compass desde diciembre 2011 cubre la región del Asia Pacífi co. Por lo tanto, China cuenta con un sistema GNSS que abarca su territorio con 13 satélites en órbita. La constelación completa -se espera que fi nalice en 2020- estará integrada
por cinco satélites geoestacionarios y de órbita-mediana, previstos para uso civil y gubernamental de China/propósito militar. El servicio gratuito para civiles tendrá una precisión de 10 m; inferior a la disponible para los usuarios autorizados.
PROGRAMA DE MODERNIZACIÓN DE GPSEl programa de modernización de GPS en EE.UU., tiene como propósito mejorar los servicios para los usuarios civiles. Para reducir los efectos de los errores introducidos por retrasos ionosféricos, un receptor tiene que recoger al menos dos señales emitidas a diferentes frecuencias. Debido a que la ionosfera infl uye sobre las señales en función de sus frecuencias, sus efectos pueden ser removidos a través de la medición de dos o más señales portadoras. En contraste, los retrasos troposféricos y los errores orbitales tienen el mismo efecto sobre todas las señales portadoras, independientemente de sus frecuencias. Para la constelación GPS de EE.UU., estas señales son L1 y L2; pero solamente el código C/A transmitido por la portadora L1 es accesible a usuarios civiles. El programa de modernización añade
una segunda señal de uso civil – la señal L2C. El primer satélite GPS emitido con L2C se lanzó el 26 de septiembre de 2005 como parte de la serie de satélites IIR (M) (la M signifi ca “modernizado”). Para rastrear L2C es necesario un receptor de frecuencia doble. Los benefi cios irán aumentando gradualmente a medida que más satélites sean puestos en órbita; desde junio de 2012, siete IIR (M) están en funcionamiento. En 2016, la capacidad completa de L2C se alcanzará con 24 satélites que emitirán la señal L2C. Para apoyar el sector de transporte en términos de Servicio para Aplicaciones Críticas (Safety-of-Life: SoL), efi ciencia de combustible y capacidad, una tercera señal de uso civil ha sido desarrollada: L5, la cual tiene una señal dos veces más potente que la de L1 y L2C, permitiendo una mejor penetración a través de árboles y otros objetos que puedan bloquear las señales GNSS. L5 es transmitida por los satélites IIF, el primero de éstos fue lanzado en mayo de 2010. En junio de 2012, dos satélites IIF quedaron operacionales y para el 2018 los 24 satélites de la
Figura 2, Una vista de la tarjeta
AsteRx3 OEM (fuente: Septentrio).
Figura 1, En conjunto con los sistemas GNSS con cobertura global, los satélites QZSS circularán en
una órbita cercana al zenit que permitirá un posicionamiento más preciso y más fi able en corredores
urbanos de Japón (fuente: Jaxa, modifi cada).
GIM0114spaans_Lemmens 17 10-04-2014 13:49:23

No
2505
GIM0114spaans_Lemmens 18 10-04-2014 13:49:23

ARTÍCULO
E D I C I Ó N 1 2 014 | INTERNATIONAL | 19
constelación estarán emitiendo la señal L5. Además de L1, L5 y L2C, GPS se ampliará con una cuarta señal de uso civil, L1C, a partir de 2014. L1C mejorará la recepción bajo las copas de los árboles y en corredores urbanos, lo que permite un posicionamiento más preciso. L1C logrará plena capacidad en 2021.
GLONASSEn el año 2010 los satélites Glonass cubrían todo el territorio de Rusia y en octubre 2011 esta constelación fue aumentada con otros cuatro satélites, recuperando sus 24 satélites. La falta de apoyo económico ha dado lugar a que la constelación – ya que ésta inicialmente se concluyó en 1997 – disminuyera hasta dejar sólo ocho satélites en órbita en abril de 2002. Una cobertura global completa podría haber sido restituida a principios de 2011 con el lanzamiento de los satélites Glonass-M el 5 de diciembre de 2010. Sin embargo, el lanzamiento del cohete cayó en el Océano Pacífi co. Lograr una cobertura global completa es una cosa, pero estimular el uso del sistema por los ciudadanos del mundo requiere mayor esfuerzo. Como una forma de apoyar a los fabricantes rusos de dispositivos de navegación portátiles, fomentando a la vez la compatibilidad Glonass, las autoridades de Rusia están considerando introducir <<incentivos fi nancieros, mediante el cobro de impuestos a la importación de todos los dispositivos portátiles capaces de captar señales GNSS, incluidos los teléfonos inteligentes y los sistemas de navegación para automóviles; a menos que estos puedan procesar señales Glonass>>. La medida ha sido motivo de discusión durante algún tiempo, con un impuesto de 25% sugerido nuevamente, a mediados de 2010. Muchas empresas ya fabrican receptores GNSS o OEM (ver recuadro) que son capaces de rastrear señales Glonass. Septentrio, por ejemplo, ofrece el multi-GNSS AsteRx3 (ver Figura 2), que tiene 136 canales y puede simultáneamente hacer un seguimiento de las señales
GPS, Glonass y Galileo, además está listo también para Compass. El Quattro-G3D de Javad, por mencionar sólo uno de los muchos productos GNSS, tiene 216 canales y puede hacer un seguimiento de las señales GPS L1/L2/L2C, Galileo E1 y GLONASS L1/L2. El receptor DGNSS C-Nav 3050 tiene 66 canales y rastrea señales GPS, Glonass y Galileo; combinado con una suscripción al servicio de aumentación, provee una precisión decimétrica en todo el mundo para cualquier punto ubicado entre los paralelos 72°N y 72°S (en el aire, sobre tierra fi rme o en el mar). Hoy en día, prácticamente todos los fabricantes de dispositivos GNSS (Ashtech, CHC, Hemisphere, Hi-Target, Leica, Novatel, Sur, Stonex, Suzhou, Topcon y Trimble, entre otros) producen receptores de alta calidad, capaces de rastrear las señales Glonass.
DGNSS Y RTKEl seguimiento de las señales L1, L2C, L5 y otras, es solamente una de las características técnicas necesarias de los receptores GNSS para lograr el objetivo de posicionamiento <<preciso y confi able. Se puede estar usando un receptor altamente sofi sticado, pero si el dispositivo tiene que operar en un entorno con una infraestructura poco desarrollada, esto puede afectar signifi cativamente obteniéndose
un desempeño inferior, al igual que un auto de carreras costoso que transita por un terreno fangoso y montañoso. La mejora de la precisión y confi abilidad para los usuarios del GNSS requiere del funcionamiento de sistemas de aumentación por
OEMEl término Fabricante de Equipos Originales (OEM) indica que los productos pueden ser
utilizados por otras empresas o fabricantes, que los incorporan como bienes propios,
ofreciéndolos al mercado bajo su propia marca. El uso de productos OEM también ha
tenido cabida en la producción de receptores GNSS, antenas y servicios. Algunos
fabricantes, como Leica y Trimble, utilizan componentes OEM en los receptores -como el
BD960 que es capaz de realizar el seguimiento de las señales GPS L2C y L5 y GLONASS
L1/L2 - antenas y software disponibles en el mercado, además los receptores GNSS son
destinados a usuarios altamente exigentes. Otros productores como Hemisphere GPS,
Novatel y Septentrio están enfocados en proveer OEM a clientes de una amplia gama de
industrias; incluyendo transporte, construcción, minería, agricultura y militares, con el fi n
de añadir la funcionalidad de posicionamiento a los barcos petroleros, camiones,
maquinaria vial (pavimentación, buldozer, palas de carga), maquinaria agrícola
(sembradoras,segadoras), aviones de combate y muchos otros vehículos.
Figura 3, Principio
de la Red RTK
(fuente: Leica
Geosystems,
modifi cada).
Figura 4, Concepto
RTK VRS (fuente
Globalcors,
modifi cada).
GIM0114spaans_Lemmens 19 10-04-2014 13:49:24

| INTERNATIONAL | E D I C I Ó N 1 2 0142020
separado. Por esto, las empresas como Leica, Trimble y C- Nav no ofrecen sólo el hardware y el software de procesamiento, sino también soluciones para eliminar los errores introducidos por los retrasos ionosféricos y troposféricos, por el reloj del receptor y de las órbitas de satélite para permitir la precisión al decímetro o incluso nivel por (sub)centímetro combinado con una alta fi abilidad y repetibilidad. Las soluciones se originan utilizando un receptor GNSS adicional, denominado estación de base, ubicado directamente en un punto con coordenadas conocidas. A continuación, estas coordenadas conocidas son comparadas con aquellas determinadas con el receptor GNSS ubicado en la estación de base. Cuando las distorsiones atmosféricas y otras fuentes de error son prácticamente las mismas en la estación de base y la posición móvil -esto será así, si la ubicación de la estación de base y del móvil no están demasiado distantes- las correcciones calculadas para la base también serán válidas para el móvil. En cuanto más próximas estén las dos, es decir, cuando las condiciones atmosféricas sean más similares (y por lo tanto las distorsiones), mejor se ajustarán las correcciones. Tales correcciones diferenciales (DGNSS) en tiempo real pueden ser transmitidas al equipo móvil por radio-enlace, telefonía móvil o internet inalámbrico, habilitando la determinación
instantánea de la posición. Cuando se utiliza sólo el código ranging (pseudodistancia), la precisión de DGNSS es de alrededor de 30 cm a 50 cm. Cuando las medidas de la fase de la portadora se añaden al código ranging -Real Time Kinematic (RTK)-Posicionamiento Cinemática en Tiempo Real– se puede lograr el nivel de precisión sub-centímetro. Hoy en día, RTK es ampliamente utilizado para topografía y otros trabajos de posicionamiento preciso. En una estación de base RTK única, se supone que los errores tienen alta correlación espacial y por lo tanto son constantes alrededor de la estación de base. Sin embargo, cuanto mayor es la distancia a la base, esta suposición es menos cierta. La distancia máxima entre el móvil y la estación de base se fi ja convencionalmente a 15 km, debido a que mayor distancia la calidad se degrada rápidamente.
RED RTKEn muchos lugares, los topógrafos en sí no necesitan confi gurar una estación de base ni invertir en dos receptores GNSS geodésicos; ya que las agencias públicas y las empresas privadas han implementado redes de receptores GNSS ubicados en distintos puntos de referencia. Estas redes de Estaciones de Referencia de Operación Continua (CORS) están disponibles durante las 24 horas todos los días y permiten el uso de un solo receptor sin comprometer la precisión y fi abilidad. Una falla temporal del enlace de comunicación del receptor GNSS con una estación de base no afecta la continuidad del trabajo; ya que las otras estaciones de base aún están en funcionamiento. Hoy en día, <<las Redes RTK (NRTK) son infraestructuras GNSS esenciales para el posicionamiento de nivel-centimétrico>>, que se obtiene cuando las estaciones de base están entre 70 km y 100 km, no más, de distancia. Los benefi cios anteriores tienen un costo: a menudo se necesita una suscripción de pago para acceder a correcciones NRTK. Como un ejemplo, Leica Geosystems ofrece
una suscripción anual a SmartNet NRTK de aproximadamente US$2.400. Sin embargo, las redes manejadas por agencias públicas, como el Sistema de Guardia Costera de EE.UU., son usualmente ofrecidas de forma gratuita, particularmente para propósitos de navegación. Diversos servicios comerciales generan correcciones RTK basados en diferentes conceptos, incluyendo Estación de Referencia Virtual (VRS), Estación de Pseudo-Referencia (PRS), FKP (acrónimo del término alemán FlächenKorrekturParameter que signifi ca parámetros de corrección por área), y Correcciones de Maestro-Auxiliar (MAC) y su refi namiento MAX e i-MAX. VRS y MAC son los dos métodos más predominantes.
VRS Y MACBásicamente, NRTK funciona de la siguiente manera (Figura 3): estaciones de base y equipos móviles usan las señales GNSS provenientes de aquellos satélites comunes a ambas observaciones (mismo satélite) y en el mismo lapso de tiempo. La observación principal es la fase de la portadora, las ambigüedades entre las estaciones de base tienen que ser resueltas en un servidor de red. A continuación, el receptor móvil toma las correcciones para modifi car sus propias observaciones o envía su localización inicial al servidor que transmitirá las correcciones al móvil (concepto VRS). El método VRS crea una estación de base virtual en el entorno de la ubicación inicial del móvil, por lo que las correcciones son calculadas utilizando la información de toda la red, que consta de al menos tres estaciones de base (Figura 4). Estas correcciones se transmiten al móvil, el cual requiere una comunicación bidireccional. Sin embargo, el móvil no tiene que llevar a cabo cálculos complejos y utiliza las correcciones como si se hubieran originado a partir de una estación de base real. En el método MAC, el móvil tiene mucha más fl exibilidad en la determinación de la solución RTK; ya que puede utilizar una interpolación
Figura 5, La
interrelación entre el
servidor y el móvil
utilizando el
concepto i-MAX
(fuente: Leica
Geosystems,
modifi cada).
GIM0114spaans_Lemmens 20 10-04-2014 13:49:24

ARTÍCULO
E D I C I Ó N 1 2 014 | INTERNATIONAL | 21
PARA MAYOR INFORMACIÓN- Janssen, V., 2009, Una
Comparación de los Principios de VRS
y MAC para Red RTK, Simposio IGNSS,
Queensland, Australia.
- Lemmens, M., 2011,
Geo-información: Tecnologías,
Aplicaciones y Medio Ambiente, Capítulo
4, Springer, ISBN 978-94-007-1666-7
simple de las correcciones de red o realizar cálculos más exactos. En principio, el método MAC sólo tiene una vía de comunicación; por lo que el móvil simplemente tiene que recoger aquellos datos de corrección calculados y difundidos por el servidor de red. Para reducir el volumen de datos, la información completa de las correcciones y de las coordenadas se envían solamente a una estación de base -la estación maestra- mientras que las diferencias de corrección y las diferencias de coordenadas son transmitidas por las estaciones auxiliares. La estación maestra no es necesariamente la estación de base más cercana al móvil (aunque este aspecto se encuentra en perfeccionamiento) por lo que este método se denomina correcciones maestro-auxiliares (MAX). Las estaciones auxiliares son escogidas entre las estaciones de base circundantes, de forma que se puede generar una solución óptima dada la posición aproximada al móvil. Por lo tanto, MAX necesita una comunicación bidireccional. Otra modalidad de solución NRTK ha sido desarrollada para aquellos móviles más antiguos que no son capaces de utilizar los mensajes RTCM 3.1, llamada corrección MAX individualizada (i-MAX). RTCM (Comisión Técnica de Radio para Servicios Marítimos) es un estándar para la transmisión de datos de correcciones en tiempo real a los receptores GNSS móviles.El método i-MAX es similar al VRS en la medida en que ambos usan una estación maestra, pero i-MAX genera correcciones desde una estación de referencia real en lugar de una virtual (Figura 5). El servicio comercial NRTK provisto por Leica -SmartNet– está basado en el método MAC. En cambio, Trimble apoya el establecimiento de NRTK sobre la base de VRS.
SBASAdemás de brindar conectividad para comunicaciones terrestres, los satélites se utilizan para entregar
correcciones diferenciales a los receptores GNSS. La implementación de este tipo de prestaciones a través de satélites geoestacionarios se denomina Sistemas de Aumentación Basado en Satélites (SBAS), capaces de enviar correcciones derivadas de las observaciones realizadas por las estaciones de base.Por lo cual, las correcciones son enviadas a uno o más satélites, para ser transmitidas a los receptores habilitados. El acceso a un SBAS disponible, permite lograr una precisión sub-métrica en el posicionamiento en tiempo real. Un sistema de estas características, desarrollado inicialmente para fi nes de navegación aérea, es el denominado WAAS (Sistema de Aumentación de Área Amplia), cuya red consiste en alrededor de 25 estaciones de base distribuidas a lo largo de EE.UU, y las correcciones se emiten a dos satélites geoestacionarios para su distribución. Por su parte, Europa ha desarrollado el Sistema Europeo de Navegación por Complemento Geoestacionario (EGNOS) con una red de 34 estaciones de base y enlaces de comunicación a través de tres satélites geoestacionarios. En el continente asiático particularmente para Japón se encuentra disponible el Sistema de Aumentación basado en Satélite Multifuncional (MSAS) y en India se está implementando el Sistema de Navegación Aumentado Geoestacionario Asistido por GPS (GAGAN) como parte del Sistema de Demostración de Tecnología (TDS). Las iniciativas anteriores son fi nanciadas con fondos públicos, la Figura 6 indica su cobertura. El OmniSTAR ofrecido por Fugro sirve para diversas aplicaciones en alta mar y terrestre, y el sistema StarFire de John Deere dirigido a la agricultura de precisión, ambos servicios comerciales de tipo SBAS.
PERSPECTIVALas personas pasan entre 80% a 90% de su tiempo en espacios interiores, donde las señales GNSS son
demasiado débiles para ser captadas por los receptores. En respuesta, una extensiva investigación está en curso para desarrollar sistemas de posicionamiento GNSS usando balizas cercanas o distantes para proporcionar conectividad en todos los rincones de los conglomerados urbanos. Las distancias o ángulos de los receptores a las balizas son usadas como cantidades de medición, lo que permite el cálculo de la posición estimada a través de técnicas como la triangulación o trilateración. El futuro del posicionamiento se ve brillante, si no fuera por la <<masifi cación del uso del rango de frecuencias del espectro electromagnético correspondientes a las microondas>> (en longitudes de onda de 1 cm a 1 m), mientras que las frecuencias cercanas al rango utilizado por los GNSS están fuertemente sobrecargadas. Por consiguiente, las demandas e intereses son enormes, y podría existir una inminente guerra de frecuencia.
Figura 6, La
cobertura de los
diversos servicios
SBAS: APV y NPA son
clasifi caciones de
navegación aérea,
las áreas NPA
(Aproximación de No
Precisión) utilizan
guía lateral, pero no
incluyen guía
vertical; descenso no
estabilizado,
mientras que las
áreas de APV tienen
guía vertical.
GIM0114spaans_Lemmens 21 10-04-2014 13:49:24

CUANDO LA PRECISIÓN ES IMPORTANTE
Los radiomódems y módulos SATEL son ampliamente usados en todas las aplicaciones que requieren una comunicación de datos precisa, estable y fiable. Nuestros módems son combatibles con varios protocolos y permanecen completamente funcionales incluso en las circunstancias más desafiantes.
www.satel.com
- se puede usar como base o repetidor- tiene alcance de hasta 80 kilómetros- resistente al agua y al polvo
Robustos y fiables, ¡pregunte a cualquier
cliente!
EASy
Pro
¡Un módulo de radio de datos Rx/Tx tan pequeño
como es posible!- fácil de integrar en dispositivos anfitrión- cifrado de AES 128-bit disponible- una estructura PCB ligera y compacta
M3-
TR3
Vea más productos enwww.satel.com
MUNDO INALÁMBRICO – SOLUCIÓNES LOCALES
M3-TR3 y EASy Pro tienen un amplio rango de sintonización de 70 MHz. Las frecuencias, canalización, potencia de salida y varios protocolos de radio se pueden seleccionar en SW. Los dos dispositivos están homologados en todo el mundo. ¡Extremadamente flexible para todos los sistemas RTK!
No
2535
No 2544
GIM0114spaans_Lemmens 22 10-04-2014 13:49:24

ARTÍCULO
EDIC IÓN 1 2014 | INTERNATIONAL | 23
POR ERIC ROMERSA, WSDATA3D, CHILE, Y OLIVIER KÜNG, PIX4D, SUIZA
UAS en los Andes
DETERMINANDO CAMBIOS DE VOLUMEN EN LA MINA A TAJO ABIERTO CHUQUICAMATA
En la minería, la determinación de los cambios de volumen en el tiempo es una tarea importante de topografía. Sin embargo, los ambientes hostiles pueden hacer la recopilación precisa y la actualización de datos geográfi cos, desafi ante. La agrimensura tradicional y el escaneo láser terrestre se enfrentan a muchos obstáculos cuando se utilizan en minas a tajo abierto a distancia. Los UAS ofrecen una alternativa sin comprometer la precisión. Aquí, los autores presentan sondeos de UAS realizados en los Andes.
La recolección de información en minas a tajo abierto se asocia con muchos riesgos. Si los protocolos de seguridad no se siguen estrictamente, los equipos pesados pueden dañar a los topógrafos que operan en el lugar. Además, la excavación del mineral produce polvo, ruido y otras condiciones de trabajo desfavorables. Cuando se localiza en zonas montañosas, la temperatura puede estar muy por debajo de cero. El acceso es a menudo limitado debido a regulaciones de seguridad, o incluso imposible, debido a las duras condiciones medioambientales. El escaneo láser terrestre (TLS) es una herramienta probada en esas
condiciones, pero requiere una inversión sustancial y logística, así como de muchos puntos establecidos, para evitar los puntos ciegos. Un UAS permite mediciones aéreas regulares que se llevan a cabo sin puntos ciegos. Además, no hay necesidad de acceder al tajo abierto, ya que un UAS puede ser dirigido por control remoto y así, la efi ciencia y líneas de tiempo de un fl ujo de trabajo fotogramétrico pueden aprovecharse plenamente.
MINA DE CHUQUICAMATAChuquicamata, en el norte de Chile, es la mina de cobre a tajo abierto
más grande del mundo por volumen excavado, y a 1000 m desde arriba a abajo, ocupa el segundo lugar en términos de profundidad (Figura 1). El diámetro es de 4 km. en particular, el nivel de profundidad entre 200 y 400 metros está siendo explorado en la actualidad y por lo tanto tiene que ser objeto de mediciones regularmente. El foso se encuentra a 2.800m sobre el nivel del mar, la velocidad y dirección del viento pueden cambiar rápidamente, lo cual impide la replicación de los planes de vuelo, mientras que las turbulencias pueden producir
Olivier Küng tiene experiencia
en la visión por computador/
visión artifi cial y, junto con el
también científi co Dr.
Christoph Strecha, co-fundó
Pix4D en 2011. La compañía se
especializa en software para la
creación de panorámicas 3D a
partir de imágenes tomadas con cámaras de
pequeño formato / consumo, y esto ya está siendo
utilizado por cientos de organizaciones.
Eric Romersa está
especializado en
agrimensura y detección
remota, realizando servicios
de monitoreo y de control de
calidad en todo el mundo. Es
co-fundador de WSdata3D,
una empresa chilena
especializada en topografía usando los UAS para
la minería, la silvicultura y la industria energética.
Él utiliza Pix4D desde principios de 2013.
GIM0114spaans_Romersa 23 10-04-2014 14:44:18
| INTERNATIONAL | E D I C I Ó N 1 2 0142424
descensos de varios metros que requiere la resistencia de un ala fi ja. La elevada altitud aumenta el consumo de energía y por lo tanto reduce el tiempo de vuelo, mientras que zonas de aterrizaje seguras son poco comunes. Ya que los lugares de aterrizaje pueden ser pequeños y rudos, se prefi ere alas fi jas, a fi n de evitar daños a las aeronaves.
Para conservar una distancia de muestra de suelo constante (GSD) la altura sobre el suelo tiene que ser confi rmada, que además desafía la planifi cación de vuelo. El viento también hace que el polvo vuele alrededor, lo cual obstruye la vista y por ello contamina a las mediciones, mientras que la excavación puede destruir puntos de control terrestre (GCP). Sin embargo, la experiencia adquirida durante numerosos vuelos
han dado una comprensión de dónde y cuándo el viento y el polvo son más severos, y esto ayuda a la hora de defi nir las variables de vuelo.
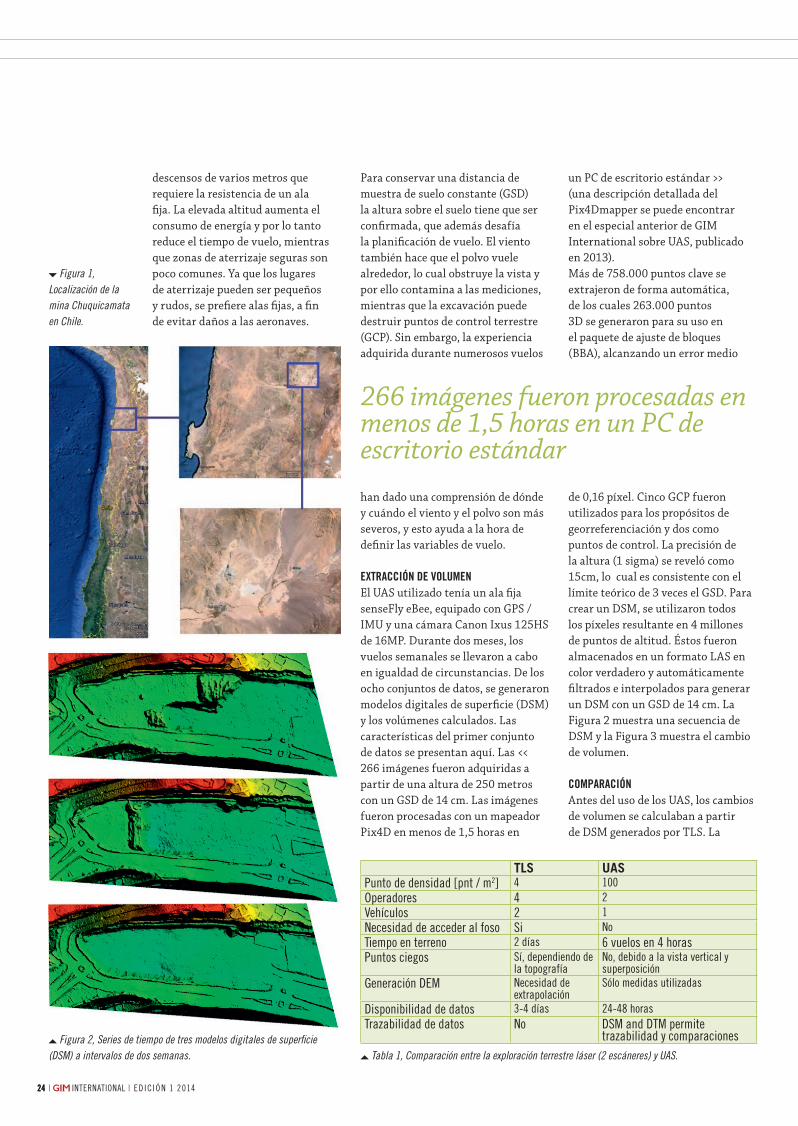
EXTRACCIÓN DE VOLUMENEl UAS utilizado tenía un ala fi ja senseFly eBee, equipado con GPS / IMU y una cámara Canon Ixus 125HS de 16MP. Durante dos meses, los vuelos semanales se llevaron a cabo en igualdad de circunstancias. De los ocho conjuntos de datos, se generaron modelos digitales de superfi cie (DSM) y los volúmenes calculados. Las características del primer conjunto de datos se presentan aquí. Las << 266 imágenes fueron adquiridas a partir de una altura de 250 metros con un GSD de 14 cm. Las imágenes fueron procesadas con un mapeador Pix4D en menos de 1,5 horas en
un PC de escritorio estándar >> (una descripción detallada del Pix4Dmapper se puede encontrar en el especial anterior de GIM International sobre UAS, publicado en 2013). Más de 758.000 puntos clave se extrajeron de forma automática, de los cuales 263.000 puntos 3D se generaron para su uso en el paquete de ajuste de bloques (BBA), alcanzando un error medio
de 0,16 píxel. Cinco GCP fueron utilizados para los propósitos de georreferenciación y dos como puntos de control. La precisión de la altura (1 sigma) se reveló como 15cm, lo cual es consistente con el límite teórico de 3 veces el GSD. Para crear un DSM, se utilizaron todos los píxeles resultante en 4 millones de puntos de altitud. Éstos fueron almacenados en un formato LAS en color verdadero y automáticamente fi ltrados e interpolados para generar un DSM con un GSD de 14 cm. La Figura 2 muestra una secuencia de DSM y la Figura 3 muestra el cambio de volumen.
COMPARACIÓNAntes del uso de los UAS, los cambios de volumen se calculaban a partir de DSM generados por TLS. La
Figura 1,
Localización de la
mina Chuquicamata
en Chile.
Figura 2, Series de tiempo de tres modelos digitales de superfi cie
(DSM) a intervalos de dos semanas.
266 imágenes fueron procesadas en menos de 1,5 horas en un PC de escritorio estándar
TLS UASPunto de densidad [pnt / m2] 4 100
Operadores 4 2
Vehículos 2 1
Necesidad de acceder al foso Si No
Tiempo en terreno 2 días 6 vuelos en 4 horasPuntos ciegos Sí, dependiendo de
la topografíaNo, debido a la vista vertical y superposición
Generación DEM Necesidad de extrapolación
Sólo medidas utilizadas
Disponibilidad de datos 3-4 días 24-48 horas
Trazabilidad de datos No DSM and DTM permite trazabilidad y comparaciones
Tabla 1, Comparación entre la exploración terrestre láser (2 escáneres) y UAS.
GIM0114spaans_Romersa 24 10-04-2014 14:44:19

ARTÍCULO
EDIC IÓN 1 2014 | INTERNATIONAL | 25
Suscríbase paraobtener su ediciónen impresa o digitalwww.gim-international.com/suscripcion
Supporting geoprofessionals in mapping the world
Mapeando el MundoPermanezca informado con GIM International – en cualquier momento y lugar
Ahora tambiéndisponible en español
No
MG
006
comparación muestra que el volumen calculado a partir de imágenes obtenidas usando los UAS, difi ere en menos de 1% del volumen TLS. Por lo tanto, la precisión del UAS es similar a TLS, pero el UAS es más seguro, más efi ciente y más productivo. Sumado a esto, el ortomosaico creado a partir de las imágenes y el DSM puede ser cubierto sobre el DSM y esta panorámica digital 3D permite avanzar, ser monitoreado e identifi car los posibles problemas. La Tabla 1 muestra una comparación del fl ujo de trabajo entre UAS y TLS utilizando dos escáneres.
OTRAS EXPERIENCIASUn vuelo sobre un área de descarga de 3,4 km2 de una presa de relaves de mina, que se encuentra en el desierto de Atacama en el norte de Chile, reveló que las líneas de vuelo perpendiculares, resultando en una superposición
Figura 3, El
mineral de cobre
extraído durante un
mes (barra de escala
en metros).
millones de puntos de altura, ambos con Pix4D, tardó 12 horas en un PC estándar de Windows, resultando en un DSM y ortomosaico ambos con un GSD de 8,7cm.
de sobre 85%, eran necesarias para evitar que el refl ejo de los cuerpos de agua perjudiquen el procesamiento automático. El área fue capturada dentro de 45 minutos, a partir de las imágenes con un GSD de 10 cm, un denso DSM y se generaron líneas de contorno exactas. Proporcionan indicadores donde el suelo y las rocas han caído en el lago, lo que puede provocar amenazas de inundación.La realización de mediciones de la altura para crear un DSM de un valle de 7,5km2 con diferencias de altura de 900 metros de profundidad en los Andes se necesitan 7 topógrafos que tardaran hasta 10 días. Al usar UAS, tomó un día para instalar y medir 8 GCP y un día para llevar a cabo 5 vuelos obteniendo 1.290 imágenes. La coincidencia de 12 millones de puntos clave para generar 5 millones de puntos de amarre para BBA y la siguiente producción de 50
GIM0114spaans_Romersa 25 10-04-2014 14:44:20

No 2531
PCC BD970 Placa base(GPS-+GLONASS-BEIDOU);Radio interna de transmisión y recepción;Procesador 454 MHz;Receptor de datos con procesador 1GHz;Fuente de alimentación doble con batería
de Li-ion de gran capacidad.
Primer GNSS RT Port l con recuencia doble de C ina;Todo-en-uno con alta precisión de 1cm;Disposi o port l pe ue o;Procesador de 1 GHz soporta tarjeta SD 32GB;Asistencia de audio inteligente.
Precisión a 1m de acceso para CORS;Bluetoot permite registro desde modem e ternos
GPRS/CDMA/3G;Procesador de 1 GHz soporta tarjeta SD 32GB.
KQ GEO Technologies
No
2560
GIM0114spaans_Romersa 26 10-04-2014 14:44:20

ARTÍCULO
EDIC IÓN 1 2014 | INTERNATIONAL | 27
POR WANG JIAN, LI LEI Y JIANG YAN, UNIVERSIDAD DE SHANDONG DE CIENCIA Y TECNOLOGÍA (SDUST), CHINA
Minería digitalMODELADO 3D DE UNA MINA DE ORO USANDO ESCANEO LÁSER
Una mina de oro ubicada en China en la provincia de Shandong, es la primera mina subterránea de este país en utilizar el escaneo láser 3D. Durante un proyecto de un año, 20 km de túneles fueron escaneados y nubes de puntos procesadas. El resultado de la “minería digital” permite una mejor planifi cación y diseño, comprobación de las cantidades de producción y seguimiento de máquinas tuneladoras y mineras, así como una mejor seguridad. Los autores describen cómo el escaneo láser se ha utilizado para el modelado 3D de una mina de oro.
Depósitos de oro clave en China están localizados en la provincia de Shandong, donde la principal mina productora de la región es operada por el Grupo de Shandong Gold(SGG), una empresa estatal del gobierno provincial de Shandong. La minería subterránea se realiza en condiciones de trabajo difíciles, a menudo en lugares remotos, y los márgenes de benefi cio son estrechos.
medioambientales duras hacen que sea difícil de instalar y conservar las marcas de medición, longitud, túneles y galerías estrechas impiden el uso de las técnicas óptimas para un control preciso, mientras que el diseño de explotación de la mina y los altos costos de operación exigen alta precisión y captura de datos efi ciente. Estaciones totales, giroscopios y nivelación han limitado aplicabilidad bajo la superfi cie. Ese equipo es bueno para el trabajo de control, para el diseño y comprobación de túneles, y la recolección de puntos individuales para construir redes de triángulos irregulares (TIN) en la creación de modelos 3D simples. De manera
Yan Jiang, PhD, es
profesor en la
Universidad de
Shandong de Ciencia y
Tecnología (SDUST),
Universidad de
Geomática. Se
especializa en
monitoreo y análisis de deformación.
Yan Jiang, PhD, es
profesor en la
Universidad de
Shandong de Ciencia y
Tecnología (SDUST),
Universidad de
Geomática. Se
especializa en
monitoreo y análisis de deformación.
Lei Li, MSc, es
asistente asociado a
la Universidad de
Shandong de Ciencia y
Tecnología (SDUST),
Universidad de
Geomática. Se
especializa en
tecnología Lidar.
Jian Wang, PhD, es profesor
asociado a la Universidad de
Shandong de Ciencia y
Tecnología (SDUST), Universidad
de Geomática. Ella se
especializa en la teoría de
procesamiento de datos
moderna, monitoreo y análisis
de deformación, y tecnología Lidar.
TOPOGRAFÍA CONVENCIONALLa topografía es utilizada a través de todo el ciclo de vida de la mina, incluyendo planifi cación y construcción, operaciones, producción, seguimiento y recuperación. Sin embargo, las minas subterráneas son lugares exigentes para la topografía y cartografía. Espacios reducidos y condiciones
GIM0114spaans_Wang Jian 27 10-04-2014 14:07:16

| INTERNATIONAL | E D I C I Ó N 1 2 0142828
que es virtualmente imposible generar modelos 3D detallados de túneles, pendientes y yacimientos usando topografía convencional. El Grupo Shandong Gold reconoció la necesidad de mejorar la recopilación de datos bajo tierra para así crear una mina digital. El escaneo láser 3D podría proporcionar la exactitud e integridad requerida, así mismo reducir el tiempo y el esfuerzo que implica la captura de datos..
MINERÍA DIGITAL Los primeros conceptos para la minería digital comenzaron en la década de los 90’s, pero desde entonces ha fructifi cado la creación de modelos digitales 3D para la minería y sus operaciones. El concepto combina la visualización y el manejo de datos espaciales de un sistema de información geográfi ca (GIP) con la capacidad operacional y decisión de un sistema de planifi cación de recursos empresariales (ERP). La minería
digital está dirigida a mejorar la seguridad y efi ciencia, generando un mayor rendimiento y optimizando el manejo del personal, equipo y recursos naturales. Éste incluye componentes para la automatización de máquinas, mantenimiento y programación, además de geología, planifi cación minera y mitigación de riesgos. ESCANEO LÁSERDurante un proyecto de un año, 20 km de túneles situados a 650 metros bajo la superfi cie, en condiciones de calor y humedad, fueron capturados utilizando un escáner Trimble FX 3D (Figura 1). Este escáner de movimiento de fase funciona en el rango medio (dependiendo de la refl ectividad con un alcance de hasta 100 metros), a temperaturas que oscilan desde los 5ºC a 45ºC. Éste ofrece un nivel de precisión milimétrica, ya que permite la exploración de un campo visual completo de 360º x 270º, con un escaneo de un solo paso que toma cinco minutos dando como resultado 65 millones de puntos. Los túneles son estrechos, variando entre 3 y 6 metros de ancho. La velocidad fue crucial, ya que las actividades de medición no deben interferir con la producción. Usando una combinación de trípodes, soportes y accesorios, el escáner se podría montar en unos pocos minutos. Cada escaneo requiere menos de cinco minutos, y se puede completar sin la nivelación del escáner. “Para garantizar
ajustes entre escaneos sucesivos, bolas objetivo se colocaron en las superposiciones” de los escáneres. Actuaban como puntos de amarre. Para conectar los escáneres al sistema de coordenadas de la mina, los puntos fueron marcados en las paredes del túnel de manera tal que estos fueran visibles en los escaneos. Estas marcas se midieron utilizando estaciones totales sin prisma. Propagación de errores riguroso basado en el ajuste de mínimos cuadrados demostró que una marca por cada cuatro escaneos fue sufi ciente para conseguir la precisión requerida para los cómputos globales de volumen (margen de incertidumbre < 5%).
MODELOS 3DDesde el georeferenciado de nubes de puntos, modelos 3D de los túneles fueron creados usando Trimble RealWorks (Figura 2). Para obtener un conjunto de datos manejable, el espaciado de las nubes de puntos originales fue alterado desde 1cm a 5cm. Este ajuste con un factor de 25 no afecta la precisión del modelo ni los cálculos posteriores. La creación de una red de triángulos irregulares (TIN) de las paredes del túnel y pendientes requiere eliminar triángulos innecesarios y compensación para la falta de datos que resultaron de las obstrucciones o interferencia durante el escaneado. Posteriormente, tuberías y conductos, ductos, canales de drenaje y otros objetos fueron extraídos de forma manual (Figura 3). Esos
Figura 1, Escáner
láser durante el
trabajo en un túnel
de una mina.
Figura 2, Medición
en la nube de puntos
3D utilizando
RealWorks Trimble.
Figura 3, Modelización 3D de una cámara de la mina mostrando el
modelo TIN y objetos de construcción extraídos manualmente.
GIM0114spaans_Wang Jian 28 10-04-2014 14:07:17

ARTÍCULO
EDIC IÓN 1 2014 | INTERNATIONAL | 29
No
2570
objetos tenían formas regulares y se modelaron como superfi cies 3D, tubos y otros. Los resultados de la minería digital fueron mucho más exactos y completos de lo que hubiera sido posible usando métodos convencionales. Todos los datos fueron transportados al software CAD. Debido a que el sistema Trimble FX puede generar datos para su uso en el paquete minero Surpac, los datos se podrían integrar rápidamente con el software existente.
APLICACIONESLa minería digital proporciona actualmente información sobre las condiciones, el estado y las cantidades de producción. Una de las aplicaciones principales es el cálculo de volúmenes, que requiere la defi nición de una superfi cie de
referencia situada al fi nal de un túnel segmentado. El techo es inspeccionado en formas planas que se modelan como pequeños cuadrados. Cada cuadrado es proyectado sobre la superfi cie de referencia, resultando en cuboides de los cuales el volumen puede ser calculado (Figura 4). La reducción del tamaño de los cuadrados corresponde a un muestreo más denso del techo y en consecuencia incrementa la precisión de los volúmenes. La minería digital también permite la comparación de los túneles construidos contra el diseño original, y la detección de potenciales problemas de seguridad debido a deformación o hundimiento. Por otra parte, la minería digital hace posible establecer un modelo detallado del yacimiento y un modelo 3D de los túneles para máquinas
de minería sin rieles. Mediante la comparación de la minería digital con el diseño, es posible monitorear si se está progresando según lo planeado, para visualizar áreas de sobre - o bajo desmonte, y para verifi car el volumen de material movido.
Figura 4, cuboides y planos verticales
creados a partir de la nube de puntos.
GIM0114spaans_Wang Jian 29 10-04-2014 14:07:18

| INTERNATIONAL | E D I C I Ó N 1 2 0143030
UAS de baja velocidad y baja altitud
ENTRELAZANDO UAV Y SOFTWARE
Con los sistemas operacionales aéreos no tripulados (UAS) de hoy en día, la fotogrametría ha entrado en una nueva era. Sin embargo, no todos los vehículos aéreos no tripulados (UAV) son adecuados para la cartografía aérea. La capacidad de volar a baja velocidad y baja altura, manteniendo una alta tolerancia al viento es esencial. El autor presenta un UAS en el que las características de vuelo favorables de un UAV en particular están fuertemente entrelazadas con la adaptada planifi cación de vuelo y el software de procesamiento para generar mapas de alta precisión, incluyendo la posibilidad de restitución estéreo.
Dr. Lomme Devriendt recibió un
doctorado en la Universidad de Gante
(Bélgica) en el campo de la geografía. Él
es jefe del Departamento de Fotogrametría
en Orbit Geospatial Technologies, con sede
en Bélgica. La compañía se especializa en
fotogrametría y la cartografía móvil.
de captura de imágenes mediante la fotogrametría a gran altitud; (2) el apoyo de mapeo 2D/3D para usos topográfi co y catastrales, así como el modelado 3D de edifi cios y otras construcciones, y (3) de alta resolución del suelo o de la distancia de muestra de suelo (GSD) y precisión de la agrimensura, que se limitan a la fotogrametría a gran altitud.
PROVISIONESLas dos primeras condiciones son fáciles de cumplir debido a que la estabilidad y la fi abilidad de la mayoría de los UAS se controlan automáticamente mediante sensores y fi rmware sofi sticado. Sumado a esto, es que un vuelo se puede realizar plenamente autónomo de acuerdo con un plan de vuelo pre - especifi cado, de modo que un operador de campo puede maniobrar el sistema con mínimo esfuerzo y altamente independiente de las condiciones climáticas. El modelado 3D es
habilitado por la maniobra de actitud del multicópteros de manera tal que fachadas y otros elementos verticales de las estructuras 3D son capturados por imágenes oblicuas. Sin embargo, la creación de imágenes de alta resolución y alta precisión requiere de disposiciones específi cas relativas a velocidad, altitud y estabilidad de los UAS, así como la confi guración de la imagen. Cuanto menor es la altura, mayor será la precisión, pero también mayor será la escala de los objetos, mientras que la oclusión hará los objetos invisibles. Este problema sólo se puede solucionar por las altas superposiciones y las imágenes de alta resolución, que requiere - teniendo en cuenta las cámaras digitales compactas - velocidad reducida de los UAS. Sin embargo, mientras menor sea la velocidad, los UAS se verán más afectados por el viento y la turbulencia, y menor será el área que puede ser capturada en un vuelo, ya que el tiempo que un
¿Puede la tecnología UAS competir con la agrimensura estándar? UAS es una valiosa adición del satélite, fotogrametría aérea y agrimensura, ya que ofrece la posibilidad de combinar la alta precisión de la agrimensura con la facilidad de captura fotogramétrica de datos geográfi cos. Para lograr la fusión de tales benefi cios, tres características son importantes: (1) una alta inmunidad a la intemperie, la luz y las condiciones del follaje que limitan los periodos operativos
GIM0114spaans_Devriendt 30 10-04-2014 14:00:46

ARTÍCULO
EDIC IÓN 1 2014 | INTERNATIONAL | 31
POR LOMME DEVRIENDT, ORBIT GEOSPATIAL TECHNOLOGIES, BÉLGICA
UAS puede permanecer en el aire se cuenta en minutos en lugar de horas. Extender el vuelo y garantizar la estabilidad requiere una distribución inteligente de energía.
MICRODRONESCon un diámetro de 103 cm. y una altura de 50 cm., los Microdrones MD4 - 1000 de tamaño medio, no sólo vuelan a una altitud de hasta 5 Km., sino que también pueden funcionar a bajas altitudes, a baja velocidad y, por lo tanto, garantizar superposiciones de alta precisión (Figura 1). Este UAS es fácil de operar y puede permanecer en el aire durante un máximo de 88 minutos gracias a su distribución inteligente de energía (es decir, el fi rmware desarrollado sobre el principio cuadrocóptero que se personaliza
para velocidades bajas RPM y se basa en una actitud inteligente, altitud y el rumbo del sistema de referencia (AAHRS) utilizando tipos de sensores como acelerómetros, giroscopios, magnetómetros, presión atmosférica, humedad y temperatura. Su alta fi abilidad (basado en una posición GPS dinámica, tecnología de saltos de frecuencia, procedimientos de aterrizaje automático, planifi cación de la cerca virtual, grabación en vuelo a bordo y en tiempo real, etc.) cumple con los requisitos legales de UAS de hoy y hace que sea más fácil obtener los permisos de vuelo. El tamaño de las cuatro hélices reduce el nivel de ruido (68 dBA a una distancia de 3 m.) y asegura la estabilidad: imágenes estables se pueden tomar hasta con una velocidad del viento de 7m/s (brisa moderada), y el sistema puede funcionar a una velocidad del viento de hasta 12 m/s (brisa fuerte). La estabilidad y fi abilidad son controladas automáticamente por sensores y fi rmware. Los UAS pueden llevar todo tipo de cámaras. Para fi nes cartográfi cos, la Olympus EP2- EP2-3, la Sony Nex-7, la Canon 550D-660D y Canon Mark III han sido probadas. El plan de vuelo de carga permite vuelo
autónomo y la captura de imágenes en las posiciones pre-especifi cadas, utilizando un sistema GNSS / IMU a bordo. Como resultado, un operador puede pilotar los UAS con un mínimo de esfuerzo en la mayoría de las condiciones climáticas. La Tabla 1 muestra las especifi caciones típicas de un plan de vuelo.
PLANIFICACIÓN DE VUELOSEl desarrollo del software de planifi cación de vuelo se centró en la facilidad de uso y rápida preparación del plan de vuelo utilizando mapas o planos. El software de planifi cación de vuelo se puede manejar en un entorno GIS para que la preparación se pueda hacer en menos de cinco minutos, y en tan sólo unos pocos pasos:- Defi nición del tipo UAS, el montaje
de la cámara y especifi caciones- Esquema de la zona y la dirección de
franja- Altura de vuelo y ajustes de
velocidad (por ejemplo, la velocidad horizontal dentro y fuera de las franjas, velocidad vertical), superposición a lo largo de / a través de, límite de tiempo de la batería, retorno a casa y opciones
Altura de Vuelo 70m
GSD 1.2cm
Superposición a lo largo de / a través de
60% / 30%
Vuelo continuo Yes
Cobertura/hora 28.79ha
Escala de imagen 1:2900
Tabla 1.
Figura 1, Microdrones MD4 - 1000 en
funcionamiento.
Figura 2, Creación de mapas sobre
una DPW utilizando visualización
estéreo strabox(izquierda) y la
visualización anaglifo estéreo.
GIM0114spaans_Devriendt 31 10-04-2014 14:00:46

No 2554
GIM0114spaans_Devriendt 32 10-04-2014 14:00:46

ARTÍCULO
EDIC IÓN 1 2014 | INTERNATIONAL | 33
de vuelo continuo, ajuste de las posiciones iniciales, tipo de vuelo (área, lineal, terrestre).
El plan de vuelo resultante establece las coordenadas (puntos de ruta) para el vuelo automatizado UAS.
TRATAMIENTOEl ajuste de bloqueo de paquetes y la generación de modelos digitales de superfi cie (DSM) y ortoimágenes se realizan de forma totalmente automática mediante métodos de coincidencia de imagen bastante similares a la fotogrametría convencional. Sin embargo, la elevada relación altura de objeto/ altura de vuelo y las cámaras digitales compactas, requieren un software modifi cado para mejorar la detección de los puntos de amarre, apoyar algoritmos de coincidencia adicionales y visualizar el relativamente alto valor z de los objetos en un ambiente de estéreo fácil de usar (Figura 2). La adición manual de líneas de rotura en el DSM utilizando la herramienta de estéreo de la estación de trabajo fotogramétrico digital (DPW) mejora la visualización 3D y las ortoimágenes. La DPW permite la visualización estereoscópica de las imágenes por varios métodos: anaglifo, estereográfi co y sistemas strabox. Con el fi n de facilitar al operador humano la extracción de datos de vectores manualmente, las imágenes se han mejorado de forma automática utilizando histogramas.
El software fotogramétrico Orbit está integrado en el software Orbit GIS, permitiendo el uso de herramientas de edición en modo estéreo y otras funcionalidades GIS mientras Orbit software también
apoya la integración de productos fotogramétricos con nubes de puntos
adquiridos por escaneo láser y otros tipos de datos geográfi cos (Figura 3).
OBSERVACIONES FINALESLas pruebas han demostrado que después del ajuste de bloque de
paquetes, el promedio de residuos en los puntos de control en tierra son menores a un centímetro para las tres coordenadas. La precisión media de los puntos de medición de objetos es de 2 a 3 cm. para las coordenadas planares y 4 a 10 cm. para el componente de la altura a los que vuelan a alturas de entre 60 m. y 100 m. Este sistema UAS no sustituirá a la agrimensura en el corto plazo, pero demuestra que la tecnología es cada vez más adecuada para aplicaciones específi cas. Los UAS están evolucionando rápidamente, y la maduración de su fotogrametría marca el inicio de una nueva era.
Figura 3, Datos vectoriales (línea amarilla) capturados, desde sistemas operacionales aéreos
no tripulados (UAS), de imágenes superpuestas en una nube de puntos del sistema IPS2 de
cartografía móvil de Topcon para un proyecto de carretera (izquierda) y para un proyecto de una
nueva zona residencial.
El software también apoya la integración de productos fotogramétricos con nubes de puntos
GIM0114spaans_Devriendt 33 10-04-2014 14:00:46

ENFOQUE TECNOLÓGICO
3434 | INTERNATIONAL | ED IC IÓN 1 2014
Un UAS destinado al mapeo, inspección o reconocimiento consiste en una mezcla de elementos incluyendo aeronaves, una estación de control terrestre (GCS), sensores de navegación a bordo, enlace de radio para el control manual de la aeronave, uno o más sensores de recolección de datos geográfi cos y un enlace inalámbrico para la transmisión de los datos registrados por los sensores de recolección de datos geográfi cos y de navegación a la GCS y PC, ordenador portátil o tablet (Figura 1).Por lo general, la aeronave - ya sea de ala fi ja o rotatoria - será propulsada por un motor eléctrico alimentado por batería. Sin embargo, la depleción de la carga de la batería está usualmente contada en minutos en lugar de horas. Como resultado, un reconocimiento aéreo que dura un día puede requerir una serie de baterías por lo cual el peso compuesto excede el peso total de las otras partes del UAS. No obstante, las baterías de hoy en día pueden ser sufi cien-temente potentes como para permitir una carga útil que es más pesada que la propia aeronave. Para propósitos de mapeado e inspección, el sensor a bordo será una cámara de alta resolución RGB, un sistema Lidar, una cámara de infra-rrojo cercano o térmica de infrarrojo, una grabadora de vídeo o una combinación de estos sensores.
PILOTAJE Debido a que ningún operador humano está a bordo, la aeronave tiene que ser controlada por pilotaje remoto mediante un enlace de radio o (semi-) de forma autónoma. Vehículos dirigidos por control remoto (RPV) requieren ingreso de entrada continuo de un operador humano en tierra, que tiene una conexión inalámbrica al UAS a través de la GCS. Las imágenes o vídeos capturados por la cámara a bordo se transmiten al computador a través de un enlace descendente de datos en tiempo real, de manera que el operador de tierra puede tener la visión de un piloto como si estuviera al interior de la cabina.Hoy en día, generalmente un UAS se controla por una sola persona y puede operar semi-automáticamente, a veces incluso hasta el nivel de despegue y aterrizaje automático. El operador sólo interviene cuando el UAS se encuentra con un obstáculo u otra amenaza potencial. La cámara u otros sensores de recolección de datos geográfi cos pueden ser montados de tal modo que éstos miren a nadir o puede estar unido a una bandeja lo cual puede rotar en torno a uno, dos o tres ejes perpendiculares para que la superfi cie pueda ser observada desde una variedad de ángulos. Con el fi n de preservar un ángulo de visión fi jo bajo la aeronave, el montaje puede ser equipado con un centro de estabilización incorporado. Ángulo de visión, exposición de imagen, zoom y otros parámetros de funcionamiento del sensor serán contro-lados por el plan de vuelo pre-cargado, pero el operador humano puede intervenir a través de la GCS si es necesario.
Enfoque tecnológico de los UAS
Figura 1, Componentes de un UAS, el helicóptero tri-rotor mostrado tiene
dos hélices para cada rotor.
POR MATHIAS LEMMENS, EDITOR SENIOR, GIM INTERNATIONAL
CONTACTO VISUAL La tendencia es hacia sistemas más autónomos. Orientación autónoma signifi ca que el computador a bordo alimentado por las entradas del sensor está en pleno control, en lugar de un operador humano. Mientras que una orientación totalmente autónoma se utiliza actualmente para opera-ciones militares, el control de un operador humano se mantiene esencialmente para uso civil. En teoría un vuelo autónomo no requiere intervención humana después de despegar, pero en la práctica el operador mantendrá el contacto visual con la aeronave durante todo el vuelo. El uso de un sistema de guiado de vuelo es ahora común, permi-tiendo vuelos semi-autónomos. Una vez en el aire el UAS será dirigido por un piloto automático con el plan de vuelo pre-cargado, en otras palabras, el avión sigue un conjunto de puntos de interés pre-programados. Los sensores de núcleo que permiten auto-pilotaje son pequeños receptores GNSS y giroscopios de estado sólido, posiblemente acompañados de un barómetro para medir la altura sobre la tierra y una brújula para medir rumbo de la aeronave.
ANTICIPARSE A LO INESPERADO Situaciones inesperadas siempre pueden surgir, como un viento repentino pesado, quedarse sin energía o frente a un encuentro cercano con otro objeto (vuelo), por lo tanto, los sensores deben ser capaces de detectar lo inesperado, para evitar colisiones o accidentes. Muchos sistemas no sólo son capaces de detectar lo inesperado, pero si son capaces de determinar el curso correcto de acción, tales como maniobras de regreso de la aeronave al sitio de despegue, la identifi cación de un lugar adecuado para aterrizar o - en el caso extremo - la organización de una suave accidente que puede resultar en daños al UAS, pero evita las lesiones a humanos y animales, lo que podría salvar vidas. Un UAS semiautónomo también es capaz de monitorear y evaluar su propia “salud”, el estado y la confi guración dentro de sus límites programados. Por lo tanto, los sensores a bordo pueden detectar un motor defec-tuoso o daño de hélice de un MultiCopter y ajustar los otros rotores para compensar los defectos para garantizar que el UAS se mantiene estable en el aire y por lo tanto bajo control.
GIM0114spaans_Technology in Focus 34 10-04-2014 14:49:51

100CT
101CT
102BNCH
103BNCH
104BNCH
105LP
106CT
108LP
107EOW
109EOW
© 2014, Trimble Navigation Limited. Reservados todos los derechos. Trimble y el logo del globo terráqueo y el triángulo son marcas comerciales de Trimble Navigation Limited, registradas en los Estados Unidos y en otros países. Access y VISION son marcas comerciales de Trimble Navigation Limited. Todas las otras marcas comerciales son propiedad de sus respectivos titulares. NP GEO-016-SPA
¿Está harto de tener que regresar al campo para recolectar los datos que le faltan? Entonces, necesita el sistema móvil para la adquisición de imágenes Trimble® V10 Imaging Rover.
Extendiendo la tecnología Trimble VISION™ aún más, el novedoso Trimble V10 es un sistema integrado que captura imágenes panorámicas digitales de 360 grados para la medición precisa del entorno que le rodea. Trabaje en el campo con más rapidez y evite la repetición de trabajos. Con el V10, puede estar seguro de que se irá del sitio de la obra con todo lo que necesita.
Tanto si necesita planificar proyectos, realizar inspecciones o investigar, esta nueva solución radical le proporcionará datos, que antes no estaban disponibles, que harán que su trabajo sea más eficiente independientemente del sector de la industria en el que trabaje.
Junto con el software de campo Trimble Access™ y el software de oficina Trimble Business Center, el Trimble V10 es una solución profesional que se adapta a los flujos de trabajo topográficos.
Véalo usted mismo en Trimble.com/V10
CAPTURE TODO AHORA, MIDA LUEGO.
No2529
GIM0114spaans_Cover_nieuw 35 11-04-14 09:36:40

No
2552
GIM0114spaans_Cover_nieuw 36 11-04-14 09:36:40