zeszyt ćwiczeń dla uczestników szkoleń z wykorzystania produktów
TRANSCRIPT

I


Zeszyt ćwiczeń dla uczestników szkoleń z wykorzystania produktów LiDAR
Warszawa 2015

Redakcja merytoryczna:
mgr Mateusz Maślanka – ProGea Consulting
Redakcja techniczna:
mgr inż. Edyta Stojek – ProGea Consulting
Kierownik projektu po stronie Wykonawcy:
mgr Mateusz Maślanka – ProGea Consulting
Koncepcja publikacji i konsultacje merytoryczne GUGiK:
mgr Jerzy Zieliński – Dyrektor Departamentu Geodezji, Kartografii i Systemów Informacji Geograficznejmgr inż. Piotr Woźniak – kierownik projektu ISOK po stronie GUGiKmgr inż. Adam Andrzejewskimgr inż. Marzena Kukiełamgr inż. Edyta Kierys-Kuklamgr inż. Małgorzata Kaczmarczyk-Kozamgr Anna Marcinkowskamgr inż. Anna Uziembłomgr Piotr WalasGrzegorz Margasiński
Autorzy ćwiczeń:
mgr inż. Klaudia Bielińska-Płoszka – Esri Polska sp. z o.o.mgr inż. Paweł Hawryło – ProGea Consultingmgr inż. Anna Machnik- Kłusek – ProGea Consultingmgr Mateusz Maślanka – ProGea Consultingmgr inż. Marcin Pierzchalski – ProGea ConsultingAneta Rzepecka – ProGea Consultingmgr inż. Edyta Stojek – ProGea Consultingdr inż. Artur Warchoł – ProGea Consultingdr hab. inż. Piotr Wężyk – ProGea Consultinginż. Jarosław Wójcik – ProGea Consultingmgr inż. Dorota Zugaj-Marcinek – ProGea Consulting
Projekt okładki:
mgr Regina Wojtyłko
Kompozycja na okładce:
ProGea Consulting (źródło danych: GUGiK)
Skład i łamanie:
dr Piotr Bieniek
Copyright © Główny Urząd Geodezji i Kartografii, Warszawa 2015Wszelkie prawa zastrzeżone
ISBN 978-83-254-2104-5
Redakcja:
ProGea Consultingul. Pachońskiego 9, 31-223 Kraków
Wydanie 2
Nakład: 180 egz.

3
Spis treści
1. Wstęp do zeszytu ćwiczeń .........................................................................................................................................9
2. Lotnicze skanowanie laserowe ...............................................................................................................................112.1. Przegląd danych LiDAR pod kątem zaplanowanych parametrów nalotu i skanowania laserowego ......11
2.1.1. Otwarcie projektu z wczytanymi trajektoriami ...................................................................................................................... 112.1.2. Wczytanie danych ALS .................................................................................................................................................................... 122.1.3. Analiza linii lotu ................................................................................................................................................................................. 142.1.4. Lokalny pomiar gęstości chmury punktów ............................................................................................................................. 182.1.5. Wizualizacja danych ALS według wysokości bezwzględnej ............................................................................................. 182.1.6. Wizualizacja danych ALS za pomocą atrybutu intensywności odbicia ......................................................................... 192.1.7. Wizualizacja danych ALS według kolejności echa odbicia ................................................................................................ 202.1.8. Wizualizacja danych ALS według rozkładu kąta skanowania ........................................................................................... 202.1.9. Podsumowanie .................................................................................................................................................................................. 22
3. Opracowanie danych pochodzących z lotniczego skanowania laserowego .................................................233.1. Omówienie formatu LAS 1.2 format 3 .............................................................................................................................23
3.1.1. Uruchomienie programu SAGA ................................................................................................................................................... 233.1.2. Wczytywanie danych w formacie LAS....................................................................................................................................... 233.1.3. Wygenerowanie nagłówka pliku LAS ........................................................................................................................................ 243.1.4. Wizualizacja danych LiDAR ........................................................................................................................................................... 263.1.5. Podsumowanie .................................................................................................................................................................................. 28
3.2. Import/Eksport danych LiDAR............................................................................................................................................293.2.1. Wczytywanie danych ALS do okna oprogramowania ArcMap ........................................................................................ 293.2.2. Eksport danych LiDAR do pliku ASCII ........................................................................................................................................ 303.2.3. Omówienie budowy pliku ASCII ................................................................................................................................................. 313.2.4. Konwersja czasu GPS do UTC ....................................................................................................................................................... 313.2.5. Import danych LiDAR w formacie ASCII ................................................................................................................................... 323.2.6. Podsumowanie .................................................................................................................................................................................. 34
3.3. Prezentacja danych LiDAR pod kątem klasyfikacji oraz nadanych atrybutów RGB ........................................353.3.1. Wczytanie i wizualizacja danych LiDAR po atrybutach RGB i klasyfikacji .................................................................... 353.3.2. Wizualizacja danych LiDAR według innych atrybutów oraz generowanie profilu podłużnego przez
chmurę punktów ALS ...................................................................................................................................................................... 373.3.3. Pomiar wysokości w oknie profilu oraz widok 3D ................................................................................................................ 383.3.4. Analiza zasięgu oraz struktury odbić (echa) sygnału w klasach pokrycia i użytkowania terenu ......................... 383.3.5. Podsumowanie .................................................................................................................................................................................. 39
3.4. Proces klasyfikacji chmury punktów LiDAR oraz weryfikacji jakościowej ............................................................. 403.4.1. Otwarcie dokumentu mapy i eksploracja danych ................................................................................................................ 403.4.2. Automatyczna klasyfikacja punktów LiDAR reprezentujących klasy grunt oraz szum ........................................... 413.4.3. Manualna reklasyfikacja chmury punktów w zakresie klasy reprezentującej punkty leżące na gruncie ......... 433.4.4. Automatyczna klasyfikacja roślinności i budynków ............................................................................................................ 453.4.5. Manualna reklasyfikacja chmury punktów LiDAR ................................................................................................................ 473.4.6. Podsumowanie .................................................................................................................................................................................. 48

Spis treści
4
4. Produkty LiDAR i produkty pochodne ..................................................................................................................494.1. Proces generowania NMT na podstawie danych pochodzących z lotniczego skanowania laserowego ....49
4.1.1. Filtracja i wizualizacja danych ...................................................................................................................................................... 494.1.2. Generowanie NMT............................................................................................................................................................................ 494.1.3. Wczytanie i wizualizacja NMT ...................................................................................................................................................... 514.1.4. Wizualizacja modelu cieniowanej rzeźby ................................................................................................................................ 524.1.5. Podsumowanie .................................................................................................................................................................................. 52
4.2. Proces generowania NMPT na podstawie danych pochodzących z lotniczego skanowania laserowego ..534.2.1. Filtracja danych ................................................................................................................................................................................... 534.2.2. Generowanie NMPT .......................................................................................................................................................................... 554.2.3. NMPT w widoku 3D ......................................................................................................................................................................... 564.2.4. Eksport NMPT do formatu ESRI Arc/Info Grid ......................................................................................................................... 574.2.5. Podsumowanie .................................................................................................................................................................................. 57
4.3. Generowanie profili terenowych .......................................................................................................................................584.3.1. Otwarcie dokumentu mapy i eksploracja danych ................................................................................................................ 584.3.2. Wykonanie pojedynczych profili terenowych na NMT i NMPT ........................................................................................ 584.3.3. Wykonanie profilu terenowego dla danych ALS ................................................................................................................... 604.3.4. Pomiar wysokościowy drzewostanu/budynków na danych LiDAR ............................................................................... 614.3.5. Podsumowanie .................................................................................................................................................................................. 61
4.4. Generowanie zNMPT jako modelu różnicowego na podstawie NMPT oraz NMT ...........................................624.4.1. Otworzenie projektu ....................................................................................................................................................................... 624.4.2. Wykonanie funkcji odejmowania dwóch modeli ................................................................................................................. 624.4.3. Zmiana formatów danych i ich eksport .................................................................................................................................... 634.4.4. Analiza wartości utworzonych modeli ...................................................................................................................................... 634.4.5. Podsumowanie ................................................................................................................................................................................... 65
4.5. Generowanie rastrowych produktów pochodnych NMT i NMPT ..........................................................................664.5.1. Rozpoczęcie pracy ........................................................................................................................................................................... 664.5.2. Wygenerowanie modelu cieniowanej rzeźby na podstawie NMT ................................................................................. 674.5.3. Wygenerowanie modelu spadków na podstawie NMT ...................................................................................................... 684.5.4. Wygenerowanie modelu ekspozycji na podstawie NMPT ................................................................................................ 684.5.5. Podsumowanie .................................................................................................................................................................................. 70
4.6. Generowanie warstwic na podstawie danych LiDAR ................................................................................................714.6.1. Otwarcie dokumentu mapy i eksploracja danych ................................................................................................................ 714.6.2. Generowanie warstwic dla wczytanej chmury punktów ................................................................................................... 714.6.3. Rozrzedzanie liczby węzłów wygenerowanych warstwic .................................................................................................. 734.6.4. Zapisywanie wartości wysokości warstwic do tabeli atrybutów .................................................................................... 744.6.5. Poprawa błędów generowania linii warstwicowych ........................................................................................................... 744.6.6. Wygładzanie warstwic .................................................................................................................................................................... 754.6.7. Wyświetlanie etykiet i zmiana stylu wyświetlania warstwic ............................................................................................. 764.6.8. Podsumowanie .................................................................................................................................................................................. 77
4.7. Generowanie modeli 3D budynków – poziom LOD 2 ...............................................................................................784.7.1. Uruchomienie oprogramowania ENVI LiDAR i wczytanie projektu ............................................................................... 784.7.2. Wybór parametrów generowania modelu 3D dachów budynków na poziomie LOD 2 ........................................ 784.7.3. Generowanie modelu 3D dachów budynków ....................................................................................................................... 804.7.4. Weryfikacja poprawności wygenerowanego modelu 3D dachów budynków .......................................................... 814.7.5. Dodanie nowego modelu 3D dachu budynku ...................................................................................................................... 814.7.6. Edycja istniejącego modelu 3D dachu budynku................................................................................................................... 824.7.7. Generowanie modelu 3D budynków w oprogramowaniu ArcScene............................................................................ 834.7.8. Podsumowanie .................................................................................................................................................................................. 85
5. Produkty LiDAR w projekcie ISOK ..........................................................................................................................865.1. Przeglądanie usług dostępnych w Geoportal.gov.pl z wykorzystaniem aplikacji GIS ...................................86
5.1.1. Struktura aplikacji mapowej Geoportal.gov.pl ...................................................................................................................... 865.1.2. Uruchomienie aplikacji mapowej Geoportal.gov.pl ............................................................................................................ 87
Spis treści
5
5.1.3. Zaprezentowanie narzędzi dostępnych w aplikacji Geoportal.gov.pl .......................................................................... 875.1.4. Przegląd pasków narzędziowych, dostępnych w Geoportal.gov.pl ............................................................................... 885.1.5. Usługi WMS ISOK dostępne w aplikacji mapowej Geoportal ........................................................................................... 895.1.6. Uruchamianie usługi WMS ISOK w Geoportal.gov.pl .......................................................................................................... 905.1.7. Procedura wczytania warstw poprzez usługę WMTS ISOK Cieniowanie ...................................................................... 935.1.8. Przegląd atrybutów dostępnych przez usługę WMS ISOK ................................................................................................ 935.1.9. Procedura odczytu atrybutów z warstwy zasięg produktów ISOK................................................................................. 945.1.10. Uruchomienie programu QGIS i wczytanie projektu ......................................................................................................... 955.1.11. Dodawanie warstwy WMS ............................................................................................................................................................ 955.1.12. Atrybuty warstw WMS ................................................................................................................................................................... 975.1.13. Modyfikacja wyświetlania warstwy WMS ............................................................................................................................... 985.1.14. Podsumowanie ................................................................................................................................................................................. 99
5.2. Przygotowanie kompozycji mapowej na podstawie produktów LiDAR i ortofotomapy .......................... 1005.2.1. Uruchomienie oprogramowania ArcMap 10.2.1 i wczytanie projektu .......................................................................1005.2.2. Ustawienie odpowiednich stylów symbolizacji danych ...................................................................................................1015.2.3. Korzystanie z Layout view ...........................................................................................................................................................1045.2.4. Przygotowanie kompozycji mapowej .....................................................................................................................................1055.2.5. Podsumowanie ................................................................................................................................................................................108
5.3. Wizualizacja 3D oraz wirtualny przelot z wykorzystaniem produktów LiDAR............................................... 1095.3.1. Uruchomienie oprogramowania ArcScene 10.2.1 i wczytanie projektu ....................................................................1095.3.2. Ustawienie odpowiednich stylów symbolizacji danych ...................................................................................................1095.3.3. Odpowiedni dobór parametrów symbolizacji danych .....................................................................................................1105.3.4. Wizualizacja danych .......................................................................................................................................................................1115.3.5. Wykonanie przelotu nad wybranym terenem .....................................................................................................................1135.3.6. Podsumowanie ................................................................................................................................................................................114
5.4. Tworzenie i walidacja metadanych NMT z wykorzystaniem edytora i walidatora metadanych dostępnych poprzez Geoportal.gov.pl......................................................................................................................... 1155.4.1. Uruchomienie edytora metadanych .......................................................................................................................................1155.4.2. Wczytanie pliku metadanych NMT ...........................................................................................................................................1155.4.3. Omówienie poszczególnych opisów metadanych .............................................................................................................1165.4.4. Walidacja pliku XML .......................................................................................................................................................................1175.4.5. Utworzenie nowego pliku metadanych .................................................................................................................................1175.4.6. Podsumowanie ................................................................................................................................................................................119
6. Kontrola produktów LiDAR .................................................................................................................................. 1206.1. Kontrola parametru gęstości chmury punktów LiDAR........................................................................................... 120
6.1.1. Omówienie procesu kontroli gęstości danych LiDAR (WT INiK 2013/2014) .............................................................1206.1.2. Weryfikacja wyników z kontroli gęstości danych LiDAR ..................................................................................................1216.1.3. Podsumowanie ................................................................................................................................................................................124
6.2. Kontrola georeferencji względnej Bloku LiDAR ........................................................................................................ 1256.2.1. Kontrola sytuacyjno-wysokościowa ........................................................................................................................................1256.2.2. Kontrola wysokościowa ................................................................................................................................................................1276.2.3. Podsumowanie ................................................................................................................................................................................128
6.3. Kontrola georeferencji bezwzględnej danych LiDAR ............................................................................................. 1296.3.1. Uruchomienie programu i wczytanie projektu ...................................................................................................................1296.3.2. Wczytanie danych LiDAR i pomiar obiektu kontrolnego .................................................................................................1306.3.3. Generowanie raportu i ocena wyników .................................................................................................................................1326.3.4. Podsumowanie ................................................................................................................................................................................133
6.4. Kontrola wizualna danych NMT ...................................................................................................................................... 1346.4.1. Otworzenie przygotowanego projektu ..................................................................................................................................1346.4.2. Kontrola wizualna NMT ................................................................................................................................................................1366.4.3. Zaznaczenie ewentualnych błędów NMT i weryfikacja na danych LiDAR. ................................................................1376.4.4. Podsumowanie ................................................................................................................................................................................141

Spis treści
6
7. Udostępnienie danych .......................................................................................................................................... 1427.1. Symulacja przeprowadzenia zamówienia na numeryczne dane wysokościowe dostępne
w państwowym zasobie geodezyjnym i kartograficznym.................................................................................... 1427.1.1. Wykorzystanie skorowidzów CODGiK .....................................................................................................................................1427.1.2. Skorzystanie z kalkulatora opłat do wstępnego oszacowania opłaty udostępnienia materiałów dla
wskazanego obszaru na cele własne .......................................................................................................................................1447.1.3. Zapoznanie z formularzami wniosków na udostępnianie danych i wnioskami uszczegóławiającymi ...........1447.1.4. Podsumowanie ................................................................................................................................................................................145
8. Narzędzia obsługi produktów LiDAR ................................................................................................................. 1468.1. Wykorzystanie baz danych PostgreSQL do przechowywania dużych zbiorów produktów LiDAR ........ 146
8.1.1. Uruchomienie programu LiS ......................................................................................................................................................1468.1.2. Eksport danych z serwera PostgreSQL ....................................................................................................................................1468.1.3. Eksport NMPT z serwera PostgreSQL ......................................................................................................................................1488.1.4. Utworzenie projektu na serwerze PostgreSQL ....................................................................................................................1498.1.5. Import danych do utworzonego projektu ............................................................................................................................1508.1.6. Podsumowanie ................................................................................................................................................................................150
9. Zastosowania produktów LiDAR oraz przyszłość ............................................................................................ 1519.1. Generowanie obrysów budynków w celu weryfikacji aktualności warstwy BDOT10k .............................. 151
9.1.1. Generowanie obrysów budynków na podstawie chmury punktów LiDAR ..............................................................1519.1.2. Porównanie wykonanych obrysów budynków z BDOT10k ............................................................................................1549.1.3. Porównanie wygenerowanych obrysów budynków z ortofotomapą .........................................................................1559.1.4. Porównanie wygenerowanych obrysów budynków z numerycznym modelem pokrycia terenu (NMPT) ...1569.1.5. Podsumowanie ................................................................................................................................................................................157
9.2. Detekcja pojedynczych drzew – określenie podstawowych parametrów drzew ........................................ 1589.2.1. Uruchomienie oprogramowania ENVI LiDAR i wczytanie projektu .............................................................................1589.2.2. Wybór parametrów generowania drzew ...............................................................................................................................1589.2.3. Analiza i weryfikacja poprawności parametrów wygenerowanych drzew ...............................................................1609.2.4. Podsumowanie ................................................................................................................................................................................163
9.3. Analizy przestrzennego rozkładu nasłonecznienia na dachach budynków .................................................. 1649.3.1. Wczytanie do oprogramowania modelu NMPT ..................................................................................................................1649.3.2. Wektoryzacja kalenic w obszarze analiz .................................................................................................................................1649.3.3. Analizy potencjału słonecznego ...............................................................................................................................................1669.3.4. Obliczanie wybranych statystyk dla warstwy nasłonecznienia .....................................................................................1699.3.5. Wizualizacja obszarów o największym nasłonecznieniu .................................................................................................1719.3.6. Podsumowanie ................................................................................................................................................................................173
9.4. Tworzenie profili podłużnych dla tras turystycznych oraz analizy widoczności ........................................... 1749.4.1. Wczytanie wektora szlaków turystycznych, NMT, NMPT i ortofotomapy ..................................................................1749.4.2. Nadawanie wartości wysokości (Z) wektorom szlaków (SHP 3D) z modelu NMT ...................................................1749.4.3. Wizualizacja przebiegu szlaku turystycznego w oknie ArcScene .................................................................................1759.4.4. Określenie pozycji obserwatora, celu jego obserwacji i parametrów kątowych ....................................................1779.4.5. Analiza widoczności charakterystycznych elementów z trasy szlaku turystycznego ..................................................1789.4.6. Podsumowanie ................................................................................................................................................................................180
9.5. Identyfikacja przeszkód dla ruchu lotniczego ........................................................................................................... 1819.5.1. Wygenerowanie zNMPT ...............................................................................................................................................................1819.5.2. Wykonanie reklasyfikacji rastra .................................................................................................................................................1839.5.3. Analiza wygenerowanych przeszkód lotniczych i weryfikacja na tle ortofotomapy .............................................1849.5.4. Automatyczna wektoryzacja wykrytych przeszkód ...........................................................................................................1859.5.5. Nadawanie wysokości dla zinwentaryzowanych przeszkód ..........................................................................................1869.5.6. Analiza przeszkód na chmurze punktów ALS ......................................................................................................................1889.5.7. Podsumowanie ................................................................................................................................................................................189
9.6. Analizy wskaźników struktury przestrzennej zieleni miejskiej w oparciu o dane LiDAR ........................... 1909.6.1. Generowanie warstwy modelu koron drzew (MKD) ..........................................................................................................1909.6.2. Analiza zasięgu drzew i zadrzewień ........................................................................................................................................191

Spis treści
7
9.6.3. Określenie podstawowych statystyk dla grup drzew ........................................................................................................1929.6.4. Obliczenie współczynników wypełnia przestrzeni przez roślinność i budynki .......................................................1929.6.5. Analizy widoczności na przykładzie symulacji wycięcia grupy drzew ........................................................................1949.6.6. Podsumowanie ................................................................................................................................................................................195
9.7. Analizy 2D i 3D struktury drzewostanów gospodarczych .................................................................................... 1969.7.1. Wykonanie modelu koron drzew..............................................................................................................................................1969.7.2. Wykonanie statystyk dla wydzieleń leśnych .........................................................................................................................1989.7.3. Szacowanie wysokości drzew oraz zwarcia drzewostanu ...............................................................................................1999.7.4. Wykrycie wierzchołków drzew ..................................................................................................................................................2009.7.5. Analiza powierzchni i objętości koron drzew .......................................................................................................................2019.7.6. Podsumowanie ................................................................................................................................................................................201
9.8. Generowanie prawdziwej ortofotomapy .................................................................................................................... 2029.8.1. Wstępne ustawienia: wczytanie danych oraz nadanie układu współrzędnych .......................................................2029.8.2. Utworzenie projektu fotogrametrycznego ...........................................................................................................................2039.8.3. Utworzenie miniaturek obrazów i wstępna korekcja tonalna zdjęć ............................................................................2049.8.4. Aerotriangulacja bloku zdjęć .....................................................................................................................................................2069.8.5. Utworzenie ramek podziału na arkusze ortofotomapy ....................................................................................................2089.8.6. Wygenerowanie wynikowej prawdziwej ortofotomapy lotniczej ................................................................................2089.8.7. Podsumowanie .................................................................................................................................................................................210
9.9. Analiza ruchów masowych ............................................................................................................................................... 2119.9.1. Rozpoczęcie pracy ..........................................................................................................................................................................2119.9.2. Wykonanie różnicowego modelu NMT ..................................................................................................................................2129.9.3. Detekcja obszarów objętych ruchami mas ziemnych na podstawie otrzymanych różnic wysokościowych..2139.9.4. Automatyczne obrysowywanie obszarów objętych ruchami masowymi .................................................................2149.9.5. Analiza wolumetryczna ................................................................................................................................................................2169.9.6. Podsumowanie ................................................................................................................................................................................221
9.10. Modelowanie przebiegu rzek z wykorzystaniem linii nieciągłości terenu ................................................... 2229.10.1. Otwarcie dokumentu mapy i wczytanie danych ...............................................................................................................2229.10.2. Definicja parametrów wektoryzacji linii nieciągłości terenu .........................................................................................2229.10.3. Edycja linii nieciągłości terenu ..................................................................................................................................................2249.10.4. Wizualizacja modelu z wykorzystaniem linii nieciągłości terenu .................................................................................2269.10.5. Podsumowanie ...............................................................................................................................................................................228
9.11. Analiza skutków spiętrzenia wody w wyniku budowy zapory wodnej ......................................................... 2299.11.1. Otwarcie dokumentu mapy i wczytanie danych ...............................................................................................................2299.11.2. Określenie objętości modelu zbiornika .................................................................................................................................2299.11.3. Generowanie modelu wysokości wody na zalanym obszarze ......................................................................................2339.11.4. Analizy zalania budynków ..........................................................................................................................................................2349.11.5. Analizy przerwania ciągłości szlaków komunikacyjnych ................................................................................................2369.11.6. Analizy objętości zalanej klasy roślinności ...........................................................................................................................2379.11.7. Podsumowanie ...............................................................................................................................................................................237
9.12. Analiza widoczności przejazdu kolumny rządowej ............................................................................................... 2389.12.1. Uruchomienie zdefiniowanego projektu w programie ArcMap ..................................................................................2389.12.2. Wykonanie analizy widoczności z projektowanej trasy ...................................................................................................2389.12.3. Uruchomienie zdefiniowanego projektu w programie ArcScene ...............................................................................2399.12.4. Analizy przestrzenne GIS w celu wytypowania budynków potencjalnie zagrażających bezpieczeństwu
trasy przejazdu ...............................................................................................................................................................................2399.12.5. Analizy widoczności dla wskazanych stanowisk obserwatorów na dachach budynków ...................................2429.12.6. Podsumowanie ...............................................................................................................................................................................243


99
1. Wstęp do zeszytu ćwiczeń
Przekazany Państwu Zeszyt ćwiczeń został opracowany przez specjalistów z różnych dziedzin nauki jako praktyczne uzupełnienie treści Podręcznika dla uczestników szkoleń z wykorzystania produktów LiDAR.
Treści zawarte w poszczególnych ćwiczeniach zostały opracowane w taki sposób, aby użytkownik mógł swobodnie i samodzielnie realizować zadania z wykorzystaniem wskazanego oprogramowania. Jednocześnie opis ćwiczeń pozwala na ich wykonanie przez osoby nie posiadające jeszcze eksperckiej wiedzy z zakresu geoinformatyki.
Zeszyt ćwiczeń zawiera zarówno treści podstawowe z zakresu prac z chmurą punk-tów ALS, jak również te dotyczące szczegółowych analiz przestrzennych opartych na modelowaniu 3D i wizualizacji danych z zakresu różnych dziedzin gospodarki czy za-gadnień dotyczących bezpieczeństwa.
Jesteśmy przekonani, iż przekazywana w Państwa ręce publikacja pozwoli na wprowadzenie nowych użytkowników w świat innowacyjnej technologii skanowania laserowego, otwierając szeroko nowe horyzonty aplikacyjnego zastosowania danych LiDAR przy wykonywaniu zaawansowanych analiz przestrzennych 3D/4D GIS.
Zespół Szkoleniowy


11
2. Lotnicze skanowanie laserowe
2.1. Przegląd danych LiDAR pod kątem zaplanowanych parametrów nalotu i skanowania laserowego
Odpowiedni dobór parametrów lotu i pracy systemu ALS jest kluczowym elementem planowania nalotu dla osiągnięcia wymaganych wskaźników jakościowych chmury punktów. Z punktu widzenia użytkownika sys-temu skanowania laserowego i użytkownika wynikowych danych, najważniejszym parametrem jest gęstość chmury punktów na powierzchni terenu. W ramach warsztatu uczestnik szkolenia przeanalizuje parametry nalotu i skanowania laserowego oraz nabędzie umiejętność lokalnego pomiaru gęstości chmury punktów.
Szacowany czas wykonania ćwiczenia: 45 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\02_01_TERRA
• 02_01_TERRA.dgn – projekt zapisany w oprogramowaniu Bentley Map PowerView;• 6407.prj – plik projektowy programu TerraScan;• M-34-47-C-c-2-1-1.las – sklasyfikowana chmura punktów ALS w formacie LAS 1.2 Data Point Record
Format 3;• trajektorie – folder z plikami zawierającymi trajektorie szeregów skanowania;• trj_3.txt – plik tekstowy zawierający współrzędne XYZ trajektorii nr 3;• scan_angle.ptc – plik definicji klas programu TerraScan;• scan_angle.mac – plik makropolecenia programu TerraScan.
Obszar: okolice Zamościa
Oprogramowanie: TerraScan (Terrasolid), Map PowerView (Bentley)
ETAPY REALIZACJI ĆWICZENIA
2.1.1. Otwarcie projektu z wczytanymi trajektoriami
1. Uruchom przygotowany plik o nazwie 02_01_TERRA.dgn, znajdujący się w lokalizacji D:\Szkolenia_LiDAR\Cwiczenia\02_01_TERRA.
2. W przestrzeni roboczej programu Bentley Map PowerView widoczny jest zasięg Bloku LiDAR nr 6407 podzielony na arkusze wraz z trajektoriami i obrysami szeregów. Używając przycisku Fit View (ryc. 1), znajdującego się na pasku narzędziowym okna widoku, możliwe jest przybliżenie się do zasięgu widocznych warstw.
Ryc. 1. Pasek narzędziowy okna widoku programu Bentley Map PowerView

2. Lotnicze skanowanie laserowe
12
3. Wybierz narzędzie Level Display (ryc. 2) znajdujące się na pasku narzędziowym Primary Tools programu Bentley Map PowerView. Klikając w oknie tego narzędzia na nazwy poszczególnych warstw możemy je odpowiednio włączyć lub wygasić w wybranym widoku.
2.1.2. Wczytanie danych ALS
1. W przestrzeni roboczej programu Bentley Map PowerView znajdują się dwa dodatkowe okna aplikacji TerraScan: menu główne programu (poziome) oraz pasek narzędziowy do pracy na chmurze punktów (pionowy).
2. W pierwszej kolejności otwórz projekt danych LiDAR. W tym celu przytrzymaj ikonę w lewym górnym rogu paska narzędziowego TerraScan, a następnie w wysuwanym menu wybierz narzędzie Define Project (ryc. 3). Pozwala ono na stworzenie nowego projektu danych LiDAR oraz na wybranie projektu zapisanego wcześniej. Poprzez zakładkę File >> Open project… otwieramy plik 6407.prj znajdujący się w folderze ćwi-czenia 02_01_TERRA.
Ryc. 2. Okno narzędzia Level Display pokazujące widoczne oraz wygaszone warstwy w aktywnym widoku
Ryc. 3. Pasek narzędziowy aplikacji TerraScan

2.1. Przegląd danych LiDAR pod kątem zaplanowanych parametrów nalotu i skanowania laserowego
13
3. Wybierz opcję File >> Open block, aby wczytać dane LiDAR do projektu z menu rozwijanego w głównym oknie aplikacji TerraScan (ryc. 4). Następnie wybierz z warstwy 1:2500 arkusz o godle M-34-47-C-c-2-1-1, znajdujący się w lewym górnym rogu obszaru. Po umieszczeniu nad nim kursora zostanie on podświetlony, wybór należy zatwierdzić poprzez kliknięcie lewym przyciskiem myszy (ryc. 4).
4. Domyślnie dane wczytane poprzez aplikację TerraScan wyświetlają się w widoku z góry. Tryb wyświetlania można zmienić – kliknij i przytrzymaj ikonę View Rotations (ryc. 5). Wybierz ikonę Rotate View, aby swo-bodnie obracać chmurę punktów. Ustaw widok Top View.
5. Otwórz dodatkowy widok poprzez wybranie na dolnym pasku narzędzia View Toggles. Numery od 1 do 8 oznaczają numery dostępnych widoków. Kliknij przycisk 2, aby włączyć dodatkowy widok (ryc. 6). Następ-nie z menu głównego programu Bentley Map PowerView wybierz Window >> Arrange.
6. Wybierz ikonę Draw Vertical Section, znajdującą się w prawym górnym rogu paska narzędziowego apli-kacji TerraScan, aby wykonać przekrój przez chmurę punktów. Po jej wybraniu wskaż punkt początkowy i końcowy linii w widoku nr 1, wzdłuż której będzie przebiegała linia przekroju. Następnie określ szerokość przekroju: poruszając myszką zobaczysz zmieniający się prostokąt, zatwierdź wybraną szerokość klikając lewym przyciskiem myszy. Po określeniu szerokości, kliknij w pustym widoku nr 2, wówczas pojawi się w nim przekrój przez chmurę punktów ALS (ryc. 7).
Ryc. 4. Obszar roboczy z wczytanymi danymi LiDAR
Ryc. 5. Funkcja View Rotations wraz z listą dostępnych rodzajów widoku
Ryc. 6. Dolny pasek narzędziowy wraz z listą widoków

2. Lotnicze skanowanie laserowe
14
2.1.3. Analiza linii lotu
1. W celu sprawdzenia przebiegu linii nalotu, przy pomocy narzędzia Level Display wygaś warstwę 1:2500 pozostawiając widoczne trajektorie i obrysy_szeregow (ryc. 8).
2. Linie trajektorii przedstawiają przebieg nalotu skanowania. Każdy kolor linii trajektorii to oddzielny szereg skanowania (ryc. 8). Na podstawie ułożenia linii można ustalić kierunek nalotu wschód-zachód wraz z dwoma szeregami poprzecznymi oznaczonymi na warstwie trajektorie kolorem białym i niebieskim.
3. Warstwa obrysy_szeregow pokazuje obszary obejmujące poszczególne pasy skanowania w obrębie całego Bloku LiDAR. Na podstawie obrysów poszczególnych szeregów sprawdź jeden z parametrów nalotu – długość szeregu skanowania. W tym celu wybierz narzędzie Tools >> Measure >> Measure Distance z paska głównego programu Bentley Map PowerView i zaznacz metodę pomiaru Between Points (ryc. 9). Pomiar wykonaj na pierwszym szeregu od góry Bloku, posiadającym trajektorię oznaczoną kolorem zielonym, klikając na początku i na końcu mierzonego obrysu szeregu. Wynik pojawi się w oknie Measure Distance.
Ryc. 7. Widok przekroju przez chmurę punktów
Ryc. 8. Prezentacja trajektorii nalotu i obrysów pasów skanowania
Ryc. 9. Funkcja Measure Distance programu Bentley Map PowerView

2.1. Przegląd danych LiDAR pod kątem zaplanowanych parametrów nalotu i skanowania laserowego
15
4. Ponownie wykorzystując narzędzie Measure Distance (ryc. 9) zmierz wartość kolejnego parametru nalotu – szerokości pasa skanowania. Pomiar wykonaj dla tego samego szeregu co w poprzednim punkcie ćwicze-nia. Wartość szerokości pasa skanowania wyniesie około 480 m.
5. Użyj narzędzia Manage Trajectories z wysuwanego menu paska narzędziowego aplikacji TerraScan (ryc. 10), aby sprawdzić zawartość plików z informacjami o trajektoriach. Wskaż ścieżkę dostępu do plików trajektorii za pomocą File >> Set directory… w oknie Trajectories (ryc. 10).
6. Okno Trajectories zawiera informacje o liczbie i numeracji szeregów skanowania. Liczba plików trajektorii odpowiada liczbie szeregów skanowania. Numerację poszczególnych szeregów sprawdź w polu Number okna Trajectories. Wybierz przycisk Identify w oknie Trajectories (ryc. 10), kliknij w pobliżu dowolnej linii trajektorii w widoku Top, w oknie Trajectories zostanie podświetlony plik trajektorii dla wybranego obszaru.
7. Ponadto w oknie Trajectories znajdują się informacje o czasie rozpoczęcia i zakończenia skanowania zapi-sany w pliku LAS. Przy użyciu narzędzia Identify sprawdź czas rozpoczęcia i zakończenia skanowania dla dowolnego szeregu skanowania.
8. Pliki trajektorii zawierają również informacje o współrzędnych i dokładności wykonanego nalotu poszcze-gólnego szeregu skanowania. Wyeksportuj pliki trajektorii do pliku tekstowego aby sprawdzić wykaz współrzędnych. W tym celu w oknie Trajectories wybierz File >> Output positions… i ustaw parametry eksportu zgodnie z ryc. 11. Wskaż ścieżkę eksportu do folderu szkoleniowego. Zatwierdź przyciskiem OK.
Po wykonanym eksporcie plików trajektorii otwórz wygenerowany plik tekstowy trajectory00001.txt dla szeregu nr 1. W pliku tekstowym znajduje się czas GPS, w kolejnych trzech kolumnach wykaz współrzęd-nych, a w kolejnych kolumnach informacje o wartościach kątów Roll, Pitch i Heading.
9. Wybierz opcję View >> Display mode w oknie głównym TerraScan, która odpowiada za zmianę wybranych parametrów wyświetlania (ryc. 12).
Ryc. 10. Narzędzie Manage Trajectories aplikacji TerraScan
Ryc. 11. Narzędzie Output trajectory positions aplikacji TerraScan

2. Lotnicze skanowanie laserowe
16
10. W celu wizualizacji chmury punktów po szeregach skanowania, z paska aplikacji TerraScan wybierz w polu Color by opcję Flightline i potwierdź przyciskiem Apply. Arkusz danych zostanie zwizualizowany po pasach nalotu (ryc. 13). Kolory pasów poszczególnych szeregów skanowania chmury punktów odpowiadają kolo-rom poszczególnych linii trajektorii.
11. Dodatkowo, w aplikacji TerraScan jest możliwość wyświetlenia pojedynczych szeregów skanowania. W tym celu wykorzystaj narzędzie View >> Display mode z paska głównego aplikacji TerraScan, w polu Lines wybierz opcję Selected, a następnie przycisk Select… W oknie Display flightlines (ryc. 14) wybierz pas skanowania nr 3 i 4, zatwierdź wybór przyciskiem OK oraz Apply w oknie Display mode. Z chmury punktów zostaną wyselekcjonowane dwa szeregi nalotu.
Ryc. 12. Narzędzie zmiany właściwości wyświetlania chmury punktów Display
mode aplikacji TerraScan
Ryc. 13. Wizualizacja chmury punktów za pomocą opcji Color by >> Flightline

2.1. Przegląd danych LiDAR pod kątem zaplanowanych parametrów nalotu i skanowania laserowego
17
12. W miejscu nakładania się chmury punktów z szeregu 3 (kolor czerwony) i 4 (kolor żółty) można zaobser-wować pas wspólnego pokrycia tych dwóch szeregów. Przy pomocy narzędzia Measure Distance (ryc. 9) zmierz szerokość pasa wzajemnego pokrycia szeregów skanowania. Dla tych szeregów szerokość pasa wzajemnego pokrycia powinna wynieść około 180 m.
13. Na podstawie plików trajektorii i wczytanego zestawu danych ALS można także pozyskać informacje o wy-sokości względnej i bezwzględnej nalotu. Wysokość bezwzględną sprawdź w pliku tekstowym trajektorii nr 3 trajectory00003.txt w kolumnie czwartej.
14. Następnie pozyskaj wysokość względną nalotu. W tym celu z menu głównego aplikacji TerraScan wybierz Tools >> Output control report. W polu Known points podaj ścieżkę do pliku trj_3.txt znajdującego się w folderze z danymi do ćwiczenia. Plik ten zawiera współrzędne XYZ trajektorii nr 3. Zatwierdź przyciskiem OK. Zostanie wygenerowany raport porównania pliku tekstowego do chmury punktów ALS. W polu Avarage magnitude (ryc. 15) otrzymasz średnią wartość różnicy wysokości pomiędzy linią trajektorii nalotu a powierzchnią terenu – jest to wartość wysokości względnej nalotu.
Ryc. 14. Okno Display mode–Narzędzie Display flightlines pozwalające na wizualizacje pojedynczych szeregów
Ryc. 15. Okno narzędzia Output control report aplikacji TerraScan

2. Lotnicze skanowanie laserowe
18
15. Wybierz Zoom In z paska View Control (ryc. 5) i przybliż się do danych tak, aby było widać pojedyncze linie skanowania w szeregu. Przy powiększeniu widoku zestawu danych można rozpoznać rodzaj optycznego układu skanującego. Rozkład punktów ALS w formie równoległych linii wskazuje na wykorzystanie skanera posiadającego wirujący wielobok o zwierciadlanych płaszczyznach (rotating poligon mirror).
2.1.4. Lokalny pomiar gęstości chmury punktów
1. Wybierz opcję Measure Point Density z paska narzędziowego View Laser (ryc. 16) aplikacji TerraScan.
2. Pomiar gęstości można przeprowadzić dla wszystkich lub dla pojedynczych klas wczytanego pliku. W polu Class wybierz opcję Any class – co oznacza wszystkie klasy wyświetlonych danych. Pomiar gęstości można przeprowadzić lokalnie dla próbki–wybierz za pomocą Sample >> Circle (ryc. 17 po lewej) i wpisz wielkość próbki w polu Width.
3. Po wybraniu opcji pomiaru gęstości kliknij w wybrany obszar chmury punktów. Wynik pomiaru gęstości chmury punktów jest wyświetlany na bieżąco w pasku stanu programu Bentley Map PowerView (ryc. 18).
4. Uzyskane wyniki gęstości chmury punktów ALS zależą m.in. od wielkości analizowanej próbki, wskazanego zbioru danych oraz pokrycia terenu.
2.1.5. Wizualizacja danych ALS według wysokości bezwzględnej
1. Wyświetl wszystkie szeregi skanowania za pomocą opcji Lines >> Draw all w oknie narzędzia Display mode (ryc. 14) i zatwierdź przyciskiem Apply. Do wizualizacji chmury punktów ALS według przedziałów wysokości bezwzględnej (ryc. 19) wskaż opcję Color by Elevation z okna View >> Display mode.
2. Wybierz przycisk Color z okna Display mode. Pojawi się okno z paletą kolorów przypisaną do poszczegól-
Ryc. 16. Wybór narzędzia Measure Point Density
Ryc. 17. Parametry narzędzia Measure Point Density
Ryc. 18. Pasek stanu programu Bentley Map PowerView po lokalnym pomiarze gęstości
chmury punktów

2.1. Przegląd danych LiDAR pod kątem zaplanowanych parametrów nalotu i skanowania laserowego
19
nych przedziałów wysokościowych wczytanych danych. Kolor niebieski jest przypisany niskim wartościom wysokości, natomiast odcienie koloru czerwonego prezentują wysokie wartości wysokości bezwzględnej.
2.1.6. Wizualizacja danych ALS za pomocą atrybutu intensywności odbicia
1. Wybierz opcję Color by Intensity z okna Display mode i zaakceptuj wybór przyciskiem Apply, dane zosta-ną wyświetlone w odcieniach szarości (ryc. 20).
Ryc. 19. Arkusz danych ALS wyświetlony po wysokości bezwzględnej
Ryc. 20. Fragment danych ALS wyświetlony za pomocą Color by Intensity

2. Lotnicze skanowanie laserowe
20
2. Skalę szarości można sprawdzić wybierając przycisk Color w oknie Display mode. Przedziały skali szaro-ści odpowiadają przedziałom wartości intensywności. Liczba przedziałów jest zależna od sposobu zapisu chmury punktów. Przy zapisie 8-bitowym można uzyskać 256, natomiast przy zapisie 16-bitowym 65536 wartości intensywności. Na tej podstawie można stwierdzić, że przeglądane dane są w zapisie 16-bitowym.
3. Sposób wyświetlania chmury punktów za pomocą intensywności jest przydatny podczas identyfikowania szczegółów terenowych, np. krawędzi jezdni, chodników.
2.1.7. Wizualizacja danych ALS według kolejności echa odbicia
1. W celu wyświetlenia chmury punktów ALS według kolejności echa odbicia wybierz Color by Echo z okna Display mode i zatwierdź przyciskiem Apply.
2. Za pomocą narzędzia Draw Vertical Section wykonaj przekrój przez chmurę punktów ALS na obszarze zawierającym wysoką roślinność i zatwierdź go w oknie 2. Po wybraniu przycisku Colors jest możliwość sprawdzenia jaki kolor punktów jest przypisany do kolejnych odbić (ryc. 21).
3. Na terenie odkrytym (prawa strona ryc. 21) znajduje się dużo punktów wyświetlanych na czerwono, które pochodzą tylko z pojedynczego (jedynego; only echo) odbicia. Podobnie wizualizowane są wierzchołki koron drzew, a także niższa roślinność znajdująca się w obrębie luk w koronach drzew. Punkty typu pierw-sze odbicie z wielu (kolor niebieski; first of many) umiejscowione są natomiast głównie w wyższych partiach koron drzew, a ostatnie z wielu–na gruncie pod roślinnością (kolor żółty).
2.1.8. Wizualizacja danych ALS według rozkładu kąta skanowania
1. Wykorzystując narzędzie Define Classes (ryc. 22) z paska narzędziowego aplikacji TerraScan, otwórz plik definiujący listę klas scan_angle.ptc.
Ryc. 21. Przekrój przez chmurę punktów ALS–kolorowanie wg typu i kolejności odbicia (echa) promienia lasera
Ryc. 22. Narzędzie Define Classes aplikacji TerraScan

2.1. Przegląd danych LiDAR pod kątem zaplanowanych parametrów nalotu i skanowania laserowego
21
2. Do klasyfikacji chmury punktów ALS według przedziałów wartości kąta skanowania służy opcja Classify >> Routine >> By angle >> Classify by angle (ryc. 23) z menu głównego aplikacji TerraScan. Wartość kąta skanowania jest przechowywana w pliku LAS. Podczas klasyfikacji określane są przedziały wartości kąta w stopniach i klasy, na których mają znaleźć się odpowiadające im punkty.
3. Wywołaj okno tworzenia makropolecenia funkcją Tools >> Macro z menu aplikacji TerraScan. Celem usprawnienia realizacji ćwiczenia przygotowano makropolecenie (Macro) z automatyczną klasyfika-cją chmury punktów ALS według kąta skanowania podzielonego na 10-stopniowe przedziały. Gotowy plik z zestawem poleceń scan_angle.mac, znajdujący się w folderze ćwiczeniowym, otwórz za pomocą File >> Open (ryc. 24).
Ryc. 23. Klasyfikacja chmury punktów ALS według wartości kąta skanowa-nia w aplikacji TerraScan
Ryc. 24. Okno dialogowe tworzenia makropolecenia do klasyfikacji chmury punktów ALS za pomocą funkcji Classify by angle

2. Lotnicze skanowanie laserowe
22
4. Uruchom makropolecenie na wczytanym do TerraScan zestawie danych. Wybierz opcję Run >> on loaded points.
5. Po wykonanym procesie za pomocą View >> Display mode (ryc. 14) wyświetl szereg nr 3 z wczytanego zestawu danych i przeanalizuj rozkład kąta skanowania w wybranym szeregu (ryc. 25). Po zbliżeniu się do prawego górnego rogu przeklasyfikowanego szeregu nr 3 można zauważyć delikatne odchylenie pasa ska-nowania o zadanym przedziale wartości kąta skanowania. Paletę barw przypisanych do poszczególnych przedziałów wartości kąta można sprawdzić w oknie narzędzia Display mode.
2.1.9. Podsumowanie
W pierwszej części został pokazany projekt z wczytanymi trajektoriami dla Bloku LiDAR nr 6407 oraz wczytano dane LiDAR dla wybranego fragmentu obszaru danych. Następnie przeanalizowano linię lotu, wykorzystując wizualizację chmury punktów ALS po szeregach skanowania. Omówiono informacje zawarte w plikach trajek-torii i pokazano, jak na ich podstawie uzyskać podstawowe parametry nalotu skanowania. Kolejnym etapem było wykonanie lokalnego pomiaru gęstości chmury punktów ALS.
Zaprezentowano również sposoby wizualizacji danych LiDAR:• według przedziałów wysokości bezwzględnej;• za pomocą atrybutu intensywności odbicia;• z wykorzystaniem kolejności echa odbicia;• według rozkładu kąta skanowania z wykorzystaniem makra klasyfikującego chmurę punktów ALS
według przedziałów kąta skanowania.
Ryc. 25. Chmura punktów ALS sklasyfikowana według wartości kąta skanowania

23
3. Opracowanie danych pochodzących z lotniczego skanowania laserowego
3.1. Omówienie formatu LAS 1.2 format 3
Niniejsze ćwiczenie ma na celu zapoznanie się ze specyfikacją formatu danych LAS. Format LAS jest otwartym formatem Amerykańskiego Towarzystwa Fotogrametrii i Teledetekcji (ASPRS). Umożliwia przechowywanie in-formacji dotyczących całego pliku w nagłówku, informacji o atrybutach oraz pełnej długości fali. W ćwiczeniu zostaną przedstawione sposoby importu plików do oprogramowania oraz ich wizualizacji.
Szacowany czas wykonania ćwiczenia: 20 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\03_01_SAGA
• N-33-91-C-c-3-1-1-4.las – chmura punktów ALS w formacie LAS wersja 1.2 Point Data Record Format 3.
Obszar: Klępino (powiat stargardzki, województwo zachodniopomorskie)
Oprogramowanie: SAGA
ETAPY REALIZACJI ĆWICZENIA
3.1.1. Uruchomienie programu SAGA
Na ekranie głównym systemu Windows 8.1 należy wcisnąć kombinację klawiszy: Windows+Q (klawisz Windows znajduje się obok klawisza Ctrl). W pojawiającym się po prawej stronie ekranu oknie Wyszukaj wpisz ciąg znaków ‘SAGA’. Po kliknięciu w ikonę programu SAGA, która pojawi się poniżej, nastąpi uruchomienie aplikacji.
3.1.2. Wczytywanie danych w formacie LAS
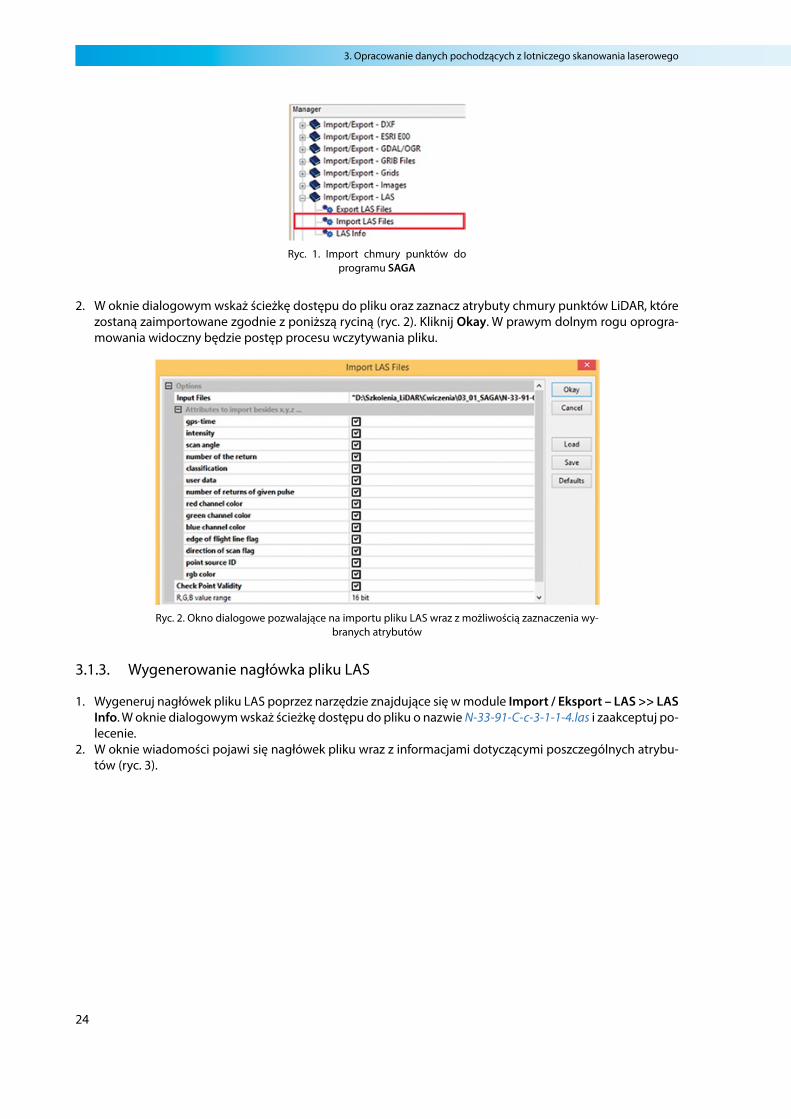
1. Wczytaj dane LiDAR w formacie LAS do oprogramowania SAGA poprzez moduł Import/Eksport – LAS >> Import LAS Files (ryc. 1).
3. Opracowanie danych pochodzących z lotniczego skanowania laserowego
24
2. W oknie dialogowym wskaż ścieżkę dostępu do pliku oraz zaznacz atrybuty chmury punktów LiDAR, które zostaną zaimportowane zgodnie z poniższą ryciną (ryc. 2). Kliknij Okay. W prawym dolnym rogu oprogra-mowania widoczny będzie postęp procesu wczytywania pliku.
3.1.3. Wygenerowanie nagłówka pliku LAS
1. Wygeneruj nagłówek pliku LAS poprzez narzędzie znajdujące się w module Import / Eksport – LAS >> LAS Info. W oknie dialogowym wskaż ścieżkę dostępu do pliku o nazwie N-33-91-C-c-3-1-1-4.las i zaakceptuj po-lecenie.
2. W oknie wiadomości pojawi się nagłówek pliku wraz z informacjami dotyczącymi poszczególnych atrybu-tów (ryc. 3).
Ryc. 1. Import chmury punktów do programu SAGA
Ryc. 2. Okno dialogowe pozwalające na importu pliku LAS wraz z możliwością zaznaczenia wy-branych atrybutów

3.1. Omówienie formatu LAS 1.2 format 3
25
3. Wygenerowany nagłówek zawiera blok nagłówkowy (PUBLIC HEADER BLOCK). Zaimportowana chmura punktów zawiera informacje takie jak ścieżka dostępu oraz nazwa chmury punktów, a także informację o wersji formatu LAS, która w przypadku zaimportowanej chmury punktów wynosi 1.2. Wygenerowany nagłówek podaje również nazwę oprogramowania (Generating Software), w którym plik został wygene-rowany: w przypadku chmury punktów N-33-91-C-c-3-1-1-4.las jest to TerraScan. Ta chmura punktów nie zawiera informacji o dacie utworzenia (File Creation Day/Year), natomiast zawiera informację o wielko-ści nagłówka (Header Size), która wynosi 227 oraz formatu wersji LAS: w przypadku tej chmury punktów jest to format 3. Blok nagłówkowy zawiera również informację o ilości punktów w chmurze, która wynosi 8483269 (Number of Point Records) oraz punkty odbicia (Number of Points by Return). Ponadto zawiera skrajne wartości (minimalne i maksymalne) X, Y, Z.
4. Drugi z wygenerowanych bloków stanowią informacje dotyczące rekordów z danymi o punktach ALS (POINT DATA RECORDS) (ryc. 4).
Wygenerowany blok POINT DATA RECORDS zawiera m.in. informacje o maksymalnych i minimalnych war-tościach atrybutów, jakie zawiera chmura punktów. W przypadku wygenerowanego nagłówka uzyskane zostały maksymalne i minimalne wartości X, Y, Z (Min X Y Z oraz Max X Y Z); minimalne wartości X, Y, Z
Ryc. 3. Wygenerowany nagłówek pliku LAS
Ryc. 4. Wygenerowany nagłówek POINT DATA RECORDS z chmury punktów LAS

3. Opracowanie danych pochodzących z lotniczego skanowania laserowego
26
wynoszą 0,000000. Ponadto wygenerowana została informacja odnośnie obrysu bloku chmury punktów (Bounding Box). Zapisany został również czas GPS (Time). Ponadto zawarte są informacje odnośnie numeru odbicia impulsu oraz liczby odbić (0 – 4), informacja odnośnie szeregu nalotu (0, 1) oraz informacja o inten-sywności (0 – 97). Kolejnym z atrybutów jest kierunek skanowania (który zależy od kierunku obrotu lustra w momencie emisji impulsu). Atrybut ten informuje o wykorzystaniu obu rodzajów kierunków skanowania (0, 1). Kąt skanowania dla tej chmury punktów wynosił od -1 do 15 (Scan Angle Rank). W wygenerowanym bloku zapisane są również informacje dotyczące klasyfikacji i ilości klas (Classification), których jest 7.
W tej części wygenerowanego nagłówka znajdują się informacje dotyczące liczby punktów dla poszczegól-nych numerów odbicia promienia lasera – ech (Number of Points by Return). Najwięcej punktów zawiera odbicie oznaczone cyfrą 0 – 8290847, a najmniej trzecie odbicie – 7514. Podana jest również suma wszyst-kich punktów – 8483269.
W dalszej części wygenerowanego nagłówka POINT DATA RECORDS (ryc. 5) znajdują się informacje doty-czące liczby odbić dla każdego impulsu (Number of Returns by Pulse).
Ostatnią częścią jest Point Classifications, w której zawarte są informacje o liczbie punktów zaklasyfikowa-nych do poszczególnych klas podczas klasyfikacji chmury punktów, np. do klasy Ground zostało zaklasyfi-kowanych 118482 punktów, a do klasy niskiej roślinności zostało sklasyfikowanych 12183 punktów.
3.1.4. Wizualizacja danych LiDAR
1. Wczytaną chmurę punktów wskaż w tabeli zawartości (zakładka Data). Kliknij prawym przyciskiem myszy i dodaj do widoku mapy (Add to map; ryc. 6.).
Ryc. 5. Wygenerowany nagłówek POINT DATA RECORDS z chmury punktów LAS cz. 2
Ryc. 6. Dodawanie chmury punktów do okna widoku mapy

3.1. Omówienie formatu LAS 1.2 format 3
27
2. W oknie właściwości wyświetlą się opcje wizualizacji chmury punktów. W opcjach ogólnych (General) zmień nazwę chmury punktów w rubryce Name (ryc. 8; nr 1) na ‘Klępino’. Poniżej znajdują się opcje do-tyczące wyświetlania legendy. Domyślnie zaznaczone jest wyświetlanie legendy, która zostaje dodana do mapy w oknie wydruku (Show Print Layout). Pozostaw te ustawienia bez zmian.
3. W dalszej części tabeli znajdują się opcje wyświetlania warstwy. Ustaw wielkość wyświetlanych punktów na 1 (Point Size; ryc. 8; nr 2). Następnie przejdź do opcji związanych z nadawaniem kolorystyki (Colors). Zmień typ wyświetlania na Lookup Table. Poniżej w rubryce Table sporządź 4 klasy poprzez funkcję Add i nadaj im następujące wartości i kolory jak na rycinie poniżej (ryc. 7).
4. Zmień atrybut (Attribute; ryc. 8; nr 4) na wysokość (Z). Użyj polecenia Apply (ryc. 8; nr 5) na samym dole okna właściwości i przeanalizuj wynik.
5. Wróć do właściwości chmury punktów i zmień typ wyświetlania na Graduated Colors (ryc. 8; nr 3). Poniżej w rubryce Colors (ryc. 8; nr 6) otwórz okno dialogowe. Następnie kliknij na Presets i wskaż jako paletę ko-lorów greyscale. Zatwierdź OK dwukrotnie.
Ryc. 7. Nadanie klas kolorystycznych chmurze punktów dla wybranego atrybu-tu w funkcji Lookup Table
Ryc. 8. Okno właściwości chmury punktów
1
2
3
6
4
5
3. Opracowanie danych pochodzących z lotniczego skanowania laserowego
28
6. Następnie w rubryce Attribute (ryc. 8; nr 5) wskaż atrybut intensywności (intensity). Zatwierdź ustawie-nia klikając na Apply. W oknie widoku mapy zostanie wyświetlona mapa według zadanych parametrów. Wyświetl mapę w widoku wydruku. W tym celu aktywuj widok mapy poprzez kliknięcie na niego – w pasku górnym pokażą się opcje dotyczące aktywnego widoku mapy. Kliknij na Show Print Layout. Po chwili pokaże się drugie okno z widokiem wydruku mapy.
3.1.5. Podsumowanie
Ćwiczenie polegało na zaimportowaniu pliku LAS do oprogramowania SAGA oraz wygenerowaniu nagłówka. Nagłówek może przybierać różną formę w zależności od oprogramowania, np. jako zewnętrzny plik tekstowy. W drugiej części ćwiczenia zostały przekazane umiejętności z zakresu wizualizacji chmury punktów m.in. ze względu na wartość wysokości oraz ze względu na intensywność.
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................

3.2. Import/Eksport danych LiDAR
29
3.2. Import/Eksport danych LiDAR
Programy dedykowane do pracy z danymi LiDAR umożliwiają import i eksport danych LiDAR z i do szeregu formatów danych przestrzennych. Uczestnik szkolenia uzyska wiedzę jak wykonać import i eksport danych LiDAR w formacie binarnym LAS oraz tekstowym TXT w wybranym oprogramowaniu oraz pozna jedną z metod pozyskiwania informacji o czasie pozyskania danych LiDAR.
Szacowany czas wykonania ćwiczenia: 25 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\03_02_LP360
• eksport_zakres.shp – plik z wybranym obszarem do eksportu danych do formatu ASCII (format SHP);• fragment_N-33-91-C-c-3-1-2-2_0.txt – plik TXT z fragmentem danych z modułu archiwizacji
N-33-91-C-c-3-1-2-2;• N-33-91-C-c-3-1-2-2.las – chmura punktów LiDAR w formacie LAS 1.2 Point Data Record Format 3.
Obszar: Klępino (powiat stargardzki, województwo zachodniopomorskie)
Oprogramowanie: LP360 (QCoherent), ArcMap (Esri)
ETAPY REALIZACJI ĆWICZENIA
3.2.1. Wczytywanie danych ALS do okna oprogramowania ArcMap
1. Korzystając z przycisku Add LiDAR Data Layer znajdującego się w pasek narzędziowy LP360, wczytaj dane LiDAR do oprogramowania ArcMap (ryc. 1).
2. W wyświetlonym oknie Add LAS Files, aby dodać pliki LAS, skorzystaj z funkcji dodawania wybranych plików LAS (Add Files…; ryc. 2; nr 1) i wczytaj plik N-33-91-C-c-3-1-2-2.las z folderu ćwiczeniowego 03_02_LP360.
3. Po wczytaniu plików LAS do okna Add LAS Files, wybierz parametry widoczne na rycinie poniżej (ryc. 2; nr 2).
Ryc. 1. Pasek Narzędziowy LP360 z dostępną funkcją dodawania plików LAS
Ryc. 2. Okno dodawania plików LAS wraz z opcjami wczytywania danych
1
2

3. Opracowanie danych pochodzących z lotniczego skanowania laserowego
30
4. Następnie przyciśnij przycisk OK, aby wybrany pliki został wczytany do oprogramowania ArcMap z użyciem rozszerzenia LP360.
5. Do oprogramowania ArcMap z użyciem polecenia Add Data dostępnym na pasku narzędziowym Standard (ryc. 3) dodaj również plik eksport_zakres.shp znajdujący się w folderze ćwiczeniowy 03_02_LP360.
3.2.2. Eksport danych LiDAR do pliku ASCII
1. Oprogramowanie LP360 pozwala na eksport danych LiDAR do formatu pliku ASCII. Eksport ten można wykonać z poziomu paska narzędziowego LP360 (ryc. 4).
2. W oknie LP360 Export Wizard (ryc. 5) dostępne są dwa typy eksportu: eksport punktów lub powierzchni. W przypadku eksportu danych do formatu ASCII, należy w oknie LP360 Export Wizard jako Export Type wybrać Points (ryc. 5; nr 1), natomiast jako Export Format wybrać ASCII XYZ (ryc. 5; nr 2).
3. Dodatkowo w obszarze wyboru atrybutów do eksportu (ryc. 5; nr 3) oprócz współrzędnych wybierz inne atrybuty, takie jak: intensywność (Intensity), klasyfikacja (Classification), kolejność odbić (Return Number), liczbę wszystkich odbić (Number of Returns), czas GPS (Timestamp), wartości R (Red) G (Green) B (Blue).
4. Jako separator wartości wybierz tabulator (ryc. 5; nr 4) oraz umieść nagłówek (ryc. 5; nr 5) w eksportowa-nym pliku ASCII. Przejdź do następnego kroku, wciskając Next.
5. Obszar eksportu oraz sposób cięcia eksportowanych modułów kontrolowany jest przez narzędzia eks-portu dostępne w drugim kroku eksportu danych LiDAR. Wykorzystując funkcję Cookie Cut by Polygons
Ryc. 3. Pasek narzędziowy Standard zawierający polecenie Add Data
Ryc. 4. Narzędzie odpowiedzialne za eksport danych LiDAR
Ryc. 5. Okno eksportu danych LiDAR
1
2
35
4

3.2. Import/Eksport danych LiDAR
31
(ryc. 6; nr 1) dla menu rozwijalnego Polygon Layers (ryc. 6; nr 2), wybierz eksport_zakres (1 Polygons), a następnie ustaw jako Name Field (ryc. 6; nr 3) kolumnę name (przechowuje docelowe nazwy plików w postaci pól tekstowych. Poprzez wybór kolumny będziemy mogli nadać na jej podstawie nazwy wyge-nerowanemu plikowi ASCII) z tabeli atrybutów wczytanego pliku eksport_zakres.shp.
6. W ostatnim kroku wskaż lokalizację eksportowanych danych ASCII (D:\Szkolenia_LiDAR\Cwiczenia\Robocze) oraz naciśnij przycisk Finish w celu wykonania zdefiniowanego eksportu.
3.2.3. Omówienie budowy pliku ASCII
1. Dane LiDAR zapisane w pliku ASCII można otworzyć w dowolnym oprogramowaniu umożliwiającym otwarcie plików w formacie TXT. W celu wyświetlania pliku fragment_N-33-91-C-c-3-1-2-2_0.txt, dostępne-go w folderze roboczym, uruchom go z wykorzystaniem Notatnika.
2. Plik zbudowany jest z kolumn zawierających wartości współrzędnych x,y,z oraz atrybuty chmury punktów ALS rozdzielone separatorem tabulatora, tj.: intensywność (Intensity), klasyfikacja (Classification), kolejność odbić (Return Number), liczbę wszystkich odbić (Number of Returns), czas GPS (Timestamp), wartości R (Red) G (Green) B (Blue). Każda z kolumn posiada nazwę odpowiadającą konkretnemu atrybutowi, umieszczoną w pierwszym wierszu wczytanego pliku (ryc. 7).
3.2.4. Konwersja czasu GPS do UTC
1. W celu konwersji czasu GPS na czas UTC skorzystaj z konwertera czasu GPS, znajdującego się na stronie internetowej www.andrews.edu/~tzs/timeconv/timeconvert.php. Wykorzystując dostępne wartości czasu GPS, znajdującego się w kolumnie timestamp pliku fragment_N-33-91-C-c-3-1-2-2_0.txt, wybierz pierwszy rekord danych z którego należy przekopiować wartość czasu GPS zapisanego w pliku tekstowym.
2. Wartość ta równa jest -9917616.423353, jednakże jest to wartość, do której przed konwersją do czasu UTM
Ryc. 6. Prawidłowo zdefiniowane zadanie eksportu danych LiDAR z uży-ciem pliku *.shp
12
3
Ryc. 7. Fragment pliku ASCII LiDAR w edytorze tekstu

3. Opracowanie danych pochodzących z lotniczego skanowania laserowego
32
należy dodać 1 000 000 000 ze względu na odejmowanie tej samej wartości od czasu GPS przed zapisem go w pliku LAS.
3. W celu obliczenia właściwej daty na podstawie zarejestrowanego czasu GPS, zsumowaną wartość czasu GPS wynoszącą 990082383.576647 wklej do konwertera czasu GPS (ryc. 8; nr 1) i dokonaj obliczenia daty poprzez przyciśnięcie przycisku Convert Time (ryc. 8; nr 2).
4. W wyniku wykonanego procesu obliczono datę wykonania pomiaru: 22 maja 2011 roku (ryc. 9).
3.2.5. Import danych LiDAR w formacie ASCII
1. Skorzystaj z paska narzędziowego LP360 i dostępnego tam menu LP360 >> Import >> Import from Ascii ‘XYZ+’ Point Files … (ryc. 10), aby wykonać import danych w formacie ASCII do pliku LAS.
2. Po uruchomieniu okna Import from Ascii ‘XYZ+’ Point Files Wizard (ryc.11) wybierz docelowe rozszerzenie dla zaimportowanych plików–Las Files (ryc.11; nr 1) oraz plik do importu fragment_N-33-91-C-c-3-1-2-2_0.txt (ryc. 11; nr 2), poprzez polecenie Add.
3. Po wskazaniu pliku ASCII możesz skorzystać z możliwości przeglądania danych ASCII i sprawdzić, jakie atry-buty zawiera importowany plik (ryc. 11; nr 3).
Ryc. 8. Okno konwertera czasu GPS
12
Ryc. 9. Wynik konwersji czasu GPS na czas UTC
Ryc. 10. Polecenie importu danych ASCII LiDAR

3.2. Import/Eksport danych LiDAR
33
4. Następnie wybierz miejsce zapisu zaimportowanych danych LiDAR (ryc. 11; nr 4).
5. W kolejnym kroku zdecyduj, czy plik zostanie zaimportowany z wykorzystaniem separatorów dostępnych w pliku ASCII, czy podzielny ręcznie (ryc. 12; nr 1). Wiedząc, że plik posiada oddzielone tabulatorem po-szczególne atrybuty oraz nagłówek z opisami kolumn, wybierz opcję Delimited oraz rozpocznij import od drugiego wiersza (ryc. 12; nr 2) wczytanego pliku ASCII.
Ryc. 11. Okno importu danych ASCII LiDAR – podstawowe parametry
1
2
3
4
Ryc. 12. Okno importu danych ASCII LiDAR – parametry importu
1
2

3. Opracowanie danych pochodzących z lotniczego skanowania laserowego
34
6. W kroku 3 jako separator wybierz Tab i naciśnij przycisk Next, który przekieruje Cię do 4 kroku w imporcie pliku ASCII.
7. Ostatnią czynnością, jaką powinno się wykonać, jest przypisanie odpowiednich atrybutów właściwym kolumnom w pliku ASCII (ryc. 13). Dokonaj importu następujących atrybutów z pliku ASCII do formatu LAS w wersji 1.4:
• X, Y, Z – współrzędne punktów LiDAR;• Classification – przypisana klasa, najczęściej według standardów pliku LAS (ASPRS);• Intensity – wartość intensywności odbitego promienia lasera od obiektu;• Point Source – w przypadku ALS oznaczenie poszczególnego szeregu nalotu;• GPS Time – moment pomiaru punktu według czasu GPS;• Return Number – kolejność odbicia;• Number of Returns – liczba wszystkich odbić;• Red, Green, Blue – wartości RGB dla każdego punktu z chmury ALS;• Unknown (Do not import) – pole jest nieznane, opuszczane podczas importu.
8. Po przypisaniu właściwych atrybutów kolumnom, rozpocznij import pliku poprzez przyciśnięcie przycisku Finish. Zaimportowane dane w postaci pliku LAS, bez przeszkód możesz wczytać z użyciem narzędzia do-dawania pliku LAS dostępnego w pasku narzędziowym LP360.
3.2.6. Podsumowanie
W pierwszej części ćwiczenia wczytano dane LiDAR w celu przeprowadzenia eksportu chmury punktów ALS, zawierającej następujące atrybuty: intensywność, klasyfikacja, kolejność odbić, liczbę wszystkich odbić, czas GPS oraz wartości RGB do formatu tekstowego. Następnie, korzystając z wyeksportowanej chmury punktów i atrybutu czasu GPS, sprawdzono czas UTC wykonanych pomiarów lotniczego skanowania laserowego. Final-nie wyeksportowaną chmurę punktów ALS zaimportowano do formatu LAS wersja 1.4, uwzględniając wszyst-kie atrybuty dostępne w pliku ASCII.
Ryc. 13. Okno importu danych ASCII LiDAR – dopasowywanie atrybutów

3.3. Prezentacja danych LiDAR pod kątem klasyfikacji oraz nadanych atrybutów RGB
35
3.3. Prezentacja danych LiDAR pod kątem klasyfikacji oraz nadanych atrybutów RGB
Po wykonaniu tego ćwiczenia uczestnik szkolenia nabędzie umiejętności wizualizacji chmury punktów ALS według różnych atrybutów (w tym atrybutów klasyfikacji oraz atrybutów koloru) a także dokonywania podsta-wowych pomiarów w chmurze punktów ALS przy wykorzystaniu przeglądarki FugroViewer (Fugro Geospatial Services) w wersji 2.0. Na profilu podłużnym przebiegającym przez chmurę punktów, użytkownik dokona ana-lizy częstości występowania odbić pośrednich w obszarach porośniętych roślinnością wysoką w porównaniu do terenów otwartych (grunty orne i drogi) i zabudowy (dachy) oraz określi zasięg przestrzenny drzewostanów.
Szacowany czas wykonania ćwiczenia: 15 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\03_03_FugroViewer
• N-33-91-C-c-3-1-2-2.las – sklasyfikowana chmura punktów ALS w formacie LAS 1.2 Data Point Record Format 3;
• N-33-91-C-c-3-1-2-2.laz – sklasyfikowana chmura punktów ALS w formacie LAZ.
Obszar: Klępino (powiat stargardzki, województwo zachodniopomorskie)
Oprogramowanie: FugroViewer (Fugro Geospatial Services)
ETAPY REALIZACJI ĆWICZENIA
3.3.1. Wczytanie i wizualizacja danych LiDAR po atrybutach RGB i klasyfikacji
1. Podwójnym kliknięciem w ikonę programu FugroViewer na pulpicie komputera uruchom przeglądarkę, wskaż katalog 03_03_FugroViewer i otwórz plik danych (File >> Open LiDAR File(s)): N-33-91-C-c-3-1-2-2.las lub zamiennie bezstratnie skompresowaną chmurę punktów ALS o tej samej nazwie z rozszerzeniem *.laz (stopień kompresji 7:1).
2. W przeglądarce FugroViewer chmura punktów ALS jest zwykle domyślnie wizualizowana w oknie 2D (widok z góry) według atrybutu RGB nadanego jej ze zdjęć lotniczych. Inne dostępne tryby widoku to tzw. okno 3D (widok izometryczny, omówiony dalej: ryc. 6; nr 3) oraz okno profilu (omówione dalej: ryc. 6; nr 1). W sy-tuacji kiedy chmura punktów jest wyświetlana w inny sposób, wybierz ikonę Color Points by Encoded RGB Image Values, znajdującą się na górnym pasku narzędzi programu (ryc. 1; nr 1).
3. W oknie 2D dokonaj fotointerpretacji pokolorowanej chmury punktów ALS, identyfikując klasy pokrycia terenu: grunty orne, lasy, zadrzewienia, zabudowa oraz infrastruktura. Dokonaj powiększenia obszarów z roślinnością wysoką i zmieniaj odpowiednio tryb wizualizacji w oknie 2D (widok z góry), używając kolej-nych ikon opisanych poniżej.
4. W sytuacji stosowania stylu wizualizacji według atrybutu wysokość, użytkownik ma do wyboru dwie palety kolorów (ryc. 1; nr 2 i 3): od niebieskiego (najniżej położone punkty) do czerwonego (ryc. 2) oraz od zielone-go przez brązowe do białego (tzw. odcienie Ziemi, Earth Tones; ryc. 3).
Ryc. 1. Menu i pasek narzędzi w programie FugroViewer. Wybór narzędzia do wizualizacji danych według atrybutu RGB (Color Points by Encoded RGB Image Value; nr 1 w okręgu)
2 3 4 5 6 7 8 1

3. Opracowanie danych pochodzących z lotniczego skanowania laserowego
36
5. Identyfikacja obszaru zabudowy przebiega znacznie sprawniej z użyciem koloru symbolizującego wyso-kość (n.p.m.), gdyż w przypadku podobnych barw dachu i otoczenia budynku użytkownik nie ma możliwo-ści jednoznacznego odróżnienia obiektów.
6. Przy pomocy narzędzia Measure Distance (ryc. 6; nr 2) opisanego poniżej, dokonaj pomiaru wysokości wybranych budynków. Procedura pomiaru została omówiona szczegółowo w dalszej części ćwiczenia.
7. W celu wizualizacji punktów ALS według atrybutu nadanego w procesie klasyfikacji chmury, kliknij ikonę (Color points by Classification) z paska narzędziowego (ryc. 1; nr 4). Przeglądarka wyświetli chmurę punk-tów ALS w barwach umownie przyjętych, tj.: grunt – kolor fioletowy, budynki – czerwony, roślinność – od-cienie zieleni.
8. Możesz zmienić kolor korzystając z polecenia Settings >> Point Dispaly Settings. Umożliwia ono również włączanie i wyłączanie wybranych klas w oknie widoku (ryc. 4, ryc. 5).
Ryc. 2. Wizualizacja według atrybutu wysokość chmury punktów ALS z paletą kolorów: niebieski-czerwony
Ryc. 3. Wizualizacja według atrybutu wysokość chmury punktów ALS z paletą kolorów: zielony-biały

3.3. Prezentacja danych LiDAR pod kątem klasyfikacji oraz nadanych atrybutów RGB
37
3.3.2. Wizualizacja danych LiDAR według innych atrybutów oraz generowanie profilu podłużnego przez chmurę punktów ALS
1. W celu wizualizacji chmury punktów ALS według intensywności odbicia (Color Points by Intensity; ryc. 1; nr 5), numeru szeregu nalotu (Color Points by Source ID; ryc. 1; nr 6) czy nazwy pliku *.las/*.laz (Color Points by File; ryc. 1; nr 7), wybieraj odpowiednie ikony z menu programu. Zwróć uwagę na niskie wartości intensyw-ności odbicia dachów (np. w stosunku do zieleni niskiej).
2. Pomiaru wartości intensywności dokonaj narzędziem Query Point Data (na lewo od ikony pomiaru wysokości).
3. Wygeneruj profil podłużny przez chmurę punktów ALS tak, aby przechodził przez obszary z roślinnością wysoką oraz dachy budynków. W tym celu wybierz narzędzie Profile Tool z paska narzędzi (ryc. 6; nr 1), a następnie przez kliknięcia lewym klawiszem myszy wskazuj kolejno: początek profilu, koniec profilu oraz przez przesuwanie myszą określ szerokość profilu. Po zatwierdzeniu lewym klawiszem wizualizacja zostanie wyświetlona w nowym oknie profilu. Możesz ustalić stałą szerokość profilu poprzez zdefiniowanie Settings >> Profile Box Width.
Ryc. 4. Wizualizacja chmury punktów ALS według atrybutu klasa (włączone klasy: 1, 5, 6 oraz 9)
Ryc. 5. Wizualizacja chmury punktów ALS według atrybutu klasa (tzw. Bare Earth = 2 i 8)

3. Opracowanie danych pochodzących z lotniczego skanowania laserowego
38
3.3.3. Pomiar wysokości w oknie profilu oraz widok 3D
1. W widoku przekroju (profilu) dokonaj pomiaru wysokości pomiędzy poszczególnymi punktami. W tym celu, przy aktywnym oknie profilu, wybierz narzędzie Measure Distance (ryc. 6; nr 2) i przeprowadź pomiar wysokości kalenicy domu. Kliknij w punkt klasy grunt przy podstawie budynku, a następnie na górną kra-wędź dachu (ryc. 7; górne okno). Wynik jest wyświetlany w oknie bezpośrednio po zakończeniu pomiaru.
2. Otwórz okno 3D (widok izometryczny chmury punktów ALS) funkcją Open 3D View dostępną z paska na-rzędzi (ryc. 6; nr 3). Kolorystyka dla okna 3D związana jest ściśle z typem prezentacji danych w oknie 2D. Przy wciśniętym lewym klawiszu myszy możliwa jest nawigacja w oknie 3D wokół osi XY, a przy prawym wzdłuż osi Z. Kółko myszki daje możliwości zmiany powiększenia widoku, który zależny jest od kadru zasto-sowanego w oknie 2D (ryc. 8).
3.3.4. Analiza zasięgu oraz struktury odbić (echa) sygnału w klasach pokrycia i użytkowania terenu
1. Przeglądarka FugroViewer pozwala użytkownikowi na wyświetlanie rodzaju echa sygnału (Color Points by Return; ryc. 1; nr 8). Do wyboru są kolejno: pojedyncze echa (single point returns), ostatnie (last returns), pierwsze (first returns), pośrednie (intermediate returns). Przy włączonych wszystkich odbiciach sygnału użytkownik łatwo zidentyfikuje jasne obszary (narożnik S-W) oznaczające drzewostany.
Ryc. 6. Pasek narzędzi FugroViewer z ikonami do wykonywania profilu (nr 1), pomiarów wysokości (nr 2) oraz otwierania okna widoku 3D (nr 3)
2 1 3
Ryc. 7. Narzędzie do generowania profilu w chmurze punktów ALS wraz z pomiarem wysokości narzędziem Measure Distance (powyżej)
Ryc. 8. Widok chmury punktów ALS w oknie 2D (z lewej; rzut z góry) oraz 3D (z prawej; rzut izometryczny) przy wybranym stylu wizualizacji po wartościach atrybutu klasa

3.3. Prezentacja danych LiDAR pod kątem klasyfikacji oraz nadanych atrybutów RGB
39
2. Wykonany profil podłużny przez tą klasę (ryc. 9) pozwala na zanalizowanie różnic pomiędzy liczbą poszcze-gólnych typów odbić (echa) w obszarach zadrzewionych (wiele odbić pośrednich na całej wysokości drzew poza pierwszym i ostatnim echem) w stosunku do terenów rolniczych i zabudowy (w większości pojedyn-cze odbicia).
3. W celu szybkiego zidentyfikowania (kartowania) obszarów z roślinnością wysoką (oraz ewentualnie liniami energetycznymi) wyłącz wszystkie klasy echa poza pośrednimi (Settings >> Point Return >> Intermediate Returns). Na ekranie pozostaną wyłącznie punkty ALS będące wynikiem odbicia promienia lasera od wnę-trza drzewostanu (bez pierwszych odbić z koron oraz ostatnich z gruntu; ryc. 10).
3.3.5. Podsumowanie
Ćwiczenie realizowane w oprogramowaniu FugroViewer polegało na poznaniu wybranych możliwości wi-zualizacji danych LiDAR w trybie widoku: 2D, 3D i oknie profilu – tj. według atrybutów: RGB, wysokość, klasa, intensywność, numer szeregu czy echo sygnału. Dodatkowymi zadaniami były: pomiar wysokości bu-dynku w oknie profilu oraz identyfikacja zasięgu klas roślinności wysokiej i jej struktury pionowej poprzez analizę liczby odbić pośrednich. Podobną funkcjonalność posiadają także inne przeglądarki danych LiDAR, np. M LiDAR czy LP360 Viewer.
Ryc. 9. Roślinność wysoka wyraźnie widoczna jako jaśniejsze punkty reprezentujące pośrednie echa sygnału odbijane od koron drzew
Ryc. 10. Profil przez fragment drzewostanu. Wizualizacja po echu sygnału

3. Opracowanie danych pochodzących z lotniczego skanowania laserowego
40
3.4. Proces klasyfikacji chmury punktów LiDAR oraz weryfikacji jakościowej
Jednym z podstawowych procesów przetwarzania chmur punktów pochodzących z lotniczego skanowania laserowego jest ich klasyfikacja. Polega ona na przypisaniu każdemu punktowi chmury właściwego atrybutu związanego z obiektem, od którego promień lasera uległ odbiciu. Procedura klasyfikacji składa się zwykle z automatycznych procesów klasyfikacji oraz manualnej weryfikacji i korekty. W ramach poniższego ćwiczenia uczestnik szkolenia nabędzie umiejętność klasyfikacji chmury punktów pochodzącej z lotniczego skanowa-nia laserowego z wykorzystaniem automatycznych algorytmów oraz manualnej reklasyfikacji danych LiDAR.
Szacowany czas wykonania ćwiczenia: 45 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\03_04_LP360
• 03_04_LP360.mxd – projekt mapy zapisany w oprogramowaniu ArcMap;• fragment_un_N-33-91-C-c-3-1-2-2.las – niesklasyfikowana chmura punktów dla fragmentu arkusza
danych LiDAR N-33-91-C-c-3-1-2-2;• fragment_ground_manual_N-33-91-C-c-3-1-2-2.las – sklasyfikowana chmura punktów w zakresie
klas: 2 – Ground oraz 7 – Low Point, po manualnej poprawie;• bledy_ground.shp – plik SHP z zaznaczonymi błędami klasy 2 – Ground;• bledy_vegbuil.shp – plik SHP z zaznaczonymi błędami klas: 3 – Low Vegetation, 4 – Medium Vegetation,
5 – High Vegetation, 6 – Building;• ISOK_macro_ground.xml – makro w formacie XML pozwalające na automatyczną klasyfikację
punktów LiDAR do klasy 2 – Ground oraz 7 – Low Point;• ISOK_macro.xml – makro w formacie XML pozwalające na automatyczną klasyfikację punktów
LiDAR do klas: 3 – Low Vegetation, 4 – Medium Vegetation, 5 – High Vegetation, 6 – Building.
Obszar: Klępino (powiat stargardzki, województwo zachodniopomorskie)
Oprogramowanie: LP360 (QCoherent), ArcMap (Esri)
ETAPY REALIZACJI ĆWICZENIA
3.4.1. Otwarcie dokumentu mapy i eksploracja danych
1. Uruchom przygotowany projekt 03_04_LP360.mxd znajdujący się w folderze 03_04_LP360.
2. W oknie aplikacji ArcMap znajdują się:• dane ALS dla niewielkiego obszaru (fragment_un_N-33-91-C-c-3-1-2-2.las znajdujące się w warstwie
LAS Layer_1) bez przypisanych klas;• pliki SHP z zaznaczonymi błędami klasy punktów leżących na gruncie (bledy_ground.shp) oraz roślinno-
ści i budynków (bledy_vegbuil.shp); • dane ALS dla niewielkiego obszaru (fragment_ground_manual_N-33-91-C-c-3-1-2-2.las znajdujące się
w warstwie LAS Layer_2) po częściowej klasyfikacji, które zostaną wykorzystane na dalszym etapie reali-zacji ćwiczenia.
Wszelkie procesy przetwarzania chmury punktów LiDAR, w tym edycji danych (np. jej klasyfikacji), muszą być wykonywane w trybie włączonej edycji (Read/Write; ryc. 1).
Ryc. 1. Ikona oznaczająca włączoną edycję chmury punk-tów

3.4. Proces klasyfikacji chmury punktów LiDAR oraz weryfikacji jakościowej
41
3.4.2. Automatyczna klasyfikacja punktów LiDAR reprezentujących klasy grunt oraz szum
1. W celu przeprowadzenia automatycznej klasyfikacji danych LiDAR skorzystaj z przygotowanego makro-polecenia, które znacznie przyspiesza proces opracowywania danych. Jest to zestaw poleceń, które będą wykonywane jedno po drugim, zawierający zdefiniowane parametry klasyfikacji punktów klasy niesklasyfi-kowane dla docelowych klas:• punktów niskich (Low Point);• punktów leżących na gruncie (Ground);• punktów należących do klasy szumy (Low Point).
2. Wczytaj do oprogramowania zdefiniowane makropolecenie o nazwie ISOK_macro_ground.xml, które znaj-duje się w folderze ćwiczeniowym, wykorzystując funkcję: Table Of Contents >> Point Cloud Task >> Import Task(s)… (ryc. 2).
3. Makro zawiera wcześniej zdefiniowane zadania klasyfikacji chmury punktów LiDAR. Po kliknięciu na po-szczególne nazwy zadań wyświetli się okno z parametrami danej procedury pozwalającej na klasyfikację chmury punktów:• zadanie ISOK_low_point (ryc. 3) oparte jest o algorytm Low/Isolated Point Filter, który pozwala na kla-
syfikację punktów znajdujących się poniżej powierzchni terenu, przenosząc wybrane punkty z klasy niesklasyfikowane do klasy punktów niskich. Algorytm wyszukuje punkty w zdefiniowanych grupach oraz analizuje różnicę wysokości między punktami w zadanym obszarze;
• zadanie ISOK_ground (ryc. 4) wyszukuje wśród punktów niesklasyfikowanych te, które należą do klasy
Ryc. 2. Obszar importu zdefiniowanych zadań
Ryc. 3. Parametry klasyfikacji punktów typu Low Point

3. Opracowanie danych pochodzących z lotniczego skanowania laserowego
42
2 – Ground. Wykonując swoje obliczenia na podstawie punktów inicjalnych, analizuje kąty i odległości iteracyjne punktów, klasyfikując punkty leżące na gruncie. Zadanie bazuje na algorytmie Adaptive TIN Ground Filter;
• zadanie ISOK_szumy (ryc. 5) odnajduje punkty stanowiące szumy wśród klasy 2 – Ground, dokonując analizy statystycznej punktów leżących na gruncie w zadanej próbce o przyjętym odchyleniu standar-dowym.
4. Kliknij ikonę Execute Taks for a Project, dostępną na pasku narzędziowym LP360 Point Cloud Task (ryc. 6). Wybranie tej opcji oznacza wykonanie zdefiniowanych zadań z wybranego makra na danych LiDAR wczy-tanych do projektu.
W wyniku działania algorytmów powstaje klasa, do której przypisywane są punkty reprezentujące grunt
Ryc. 4. Parametry klasyfikacji punktów leżących na gruncie
Ryc. 5. Parametry klasyfikacji szumów
Ryc. 6. Narzędzie Execute Taks for a Project do wykonywania zadań dla całego projektu
(ikona w czerwonej ramce)

3.4. Proces klasyfikacji chmury punktów LiDAR oraz weryfikacji jakościowej
43
(2 – Ground) oraz klasa punktów niskich i należących do klasy szumy (7 – Low Point).
5. Po wykonanej automatycznej klasyfikacji chmury punktów otwórz okno 3D w dowolnym obszarze sklasy-fikowanych danych LiDAR. W tym celu:• wybierz funkcję Define the 3D Window’s Extent (ryc. 7), dostępną na pasku narzędziowym LP360
Viewer Integration;
• narysuj narzędziem zaznaczania prostokątny obszar w obszarze widoku mapy;• po otwarciu okna 3D ustaw wizualizację chmury punktów według klasy (ryc. 8);• w obszarze okna dostrzeżesz wyświetlone pomarańczowe punkty klasy 2 – Ground, fioletowe punkty
klasy 7 – Low Point oraz szare punkty klasy 1 – Unclassified.
6. W celu osiągnięcia jeszcze lepszych wyników klasyfikacji i uniknięcia przenoszenia się błędów, w następ-nym etapie zaprezentowane zostaną czynności manualnej reklasyfikacji chmury punktów ALS dla klasy 2 – Ground.
3.4.3. Manualna reklasyfikacja chmury punktów w zakresie klasy reprezentującej punkty leżące na gruncie
1. W celu identyfikacji błędów klasyfikacji punktów leżących na gruncie stosuje się odpowiednie metody wi-zualizacji danych. Wykonaj poniższe kroki:• kliknij prawym przyciskiem myszy na dane LAS Layer_1 i wybierz Properties… Przejdź do zakładki
Symbology >> Elevation. Zaznacz Color Band i wpisz wartość 0.40 przy Vertical Distance between colors;• wyświetl chmurę punktów ALS według zdefiniowanych przedziałów atrybutu wysokość (pasek narzę-
dziowy LP360 >> Display by Color Band; ryc. 9; nr 1);
Ryc. 7. Pasek narzędziowy LP360 Viewer Integra-tion wraz z zaznaczoną ikoną rysowania widoku
okna 3D
Ryc. 8. Chmura punktów ALS po automatycznej klasyfikacji punktów klasy 2 – Ground i 7 – Low Point

3. Opracowanie danych pochodzących z lotniczego skanowania laserowego
44
• zastosuj typ wizualizacji – model TIN z punktami (pasek narzędziowy LP360 >> Draw points on TIN; ryc. 9; nr 2 );
• wybierz filtrację ograniczającą wyświetlenie danych LiDAR do klasy punkty leżące na gruncie (pasek narzędziowy LP360 >> Filter >> Ground; ryc. 9; nr 3).
Poprzez zastosowanie takiego typu wizualizacji danych, punkty z klasy 2 – Ground, będące jeszcze nieod-filtrowanym szumem (błędnie zakwalifikowane w wyniku automatycznego procesu klasyfikacji), zostaną wyświetlone w innym kolorze niż ich najbliższe otoczenie (ryc. 10).
2. Plik bledy_ground.shp zawiera 26 poligonów z obszarami błędów klasy 2 – Ground. Włącz widoczność tej warstwy, zaznaczając kwadracik z lewej strony nazwy bledy_ground.shp.
3. Celem przypisania punktów do poprawnej klasy należy dokonać manualnej edycji chmury punktów na-rzędziami dostępnymi na pasku narzędziowym LP360 Classify. Włącz edycję chmury punktów, wybierając narzędzie Toggle Edit Mode na powyższym pasku narzędziowym (ryc. 11; nr 1).
4. Wybierz z menu rozwijanego paska narzędziowego klasę 1 – Unclassified (ryc. 11; nr 2) jako Destination Class & Flags (klasę do której zostaną przeniesione punkty błędnie przyporządkowane).
5. Przybliż się do wskazanych miejsc z pliku SHP i zaznacz punkty błędnie sklasyfikowane jako punkty tereno-we, korzystając z narzędzi zaznaczania obszarów (ryc. 11; nr 3). Po zaznaczeniu punktów błędnie sklasyfiko-wanych naciśnij spację, zatwierdzając w ten sposób wykonanie zadania. Automatycznie zmieni się wygląd modelu TIN, co potwierdza przeniesienie punktów z klasy 2 – Ground do klasy 1 – Unclassified.
6. Powyższą czynność (krok 5) powtórz dla wszystkich zidentyfikowanych błędów klasyfikacji punktów leżą-cych na gruncie.
7. Po zakończonej manualnej edycji wyłącz edycję chmury punktów, korzystając z narzędzia Toggle Edit Mode na pasku narzędziowym LP360 Classify (ryc. 11; nr 1).
8. Rezultatem wykonanej manualnej klasyfikacji jest prawidłowo przetworzona chmura punktów w zakresie klasy 2 – Ground oraz klasy 7 – Low Point. Kolejnym krokiem w klasyfikacji chmury punktów po prawidłowo wykonanej klasyfikacji punktów leżących na gruncie oraz szumów jest automatyczna klasyfikacja roślinno-ści i budynków.
Ryc. 9. Narzędzie wizualizacji chmury punktów dostępne na pasku narzędziowym LP360
31 2
Ryc. 10. Przykłady błędów automatycznej klasyfikacji punktów klasy 2 – Ground (lokalne piki w białych okręgach)
Ryc. 11. Pasek narzędziowy LP360 Classify1 3
2

3.4. Proces klasyfikacji chmury punktów LiDAR oraz weryfikacji jakościowej
45
3.4.4. Automatyczna klasyfikacja roślinności i budynków
1. Na pasku narzędziowym LP360 wybierz LAS Layer_2 jako aktywną warstwę przetwarzania danych ALS (ryc. 12).
2. Odznacz kwadracik z lewej strony nazwy warstwy LAS Layer_1 w oknie Table Of Contents (ryc. 13) – dzięki temu skorzystasz z wcześniej przygotowanego pliku LAS - fragment_ground_manual_N-33-91-C-c-3-1-2-2.las, dostępnego w warstwie LAS Layer_2. Plik ten posiada wyodrębnione klasy 2 – Ground oraz 7 – Low Point i będzie można wykorzystać go do automatycznej i manualnej klasyfikacji punktów roślinności i budynków.
3. W celu przeprowadzenia dalszej automatycznej klasyfikacji danych LiDAR wybierz plik ISOK_macro.xml po-przez menu Table Of Contents >> Point Cloud Task >> Import Task(s)… (ryc. 2). Plik ten zawiera algorytmy pozwalające na automatyczną klasyfikację roślinności (Vegetation) i budynków (Building).
4. Po kliknięciu na nazwę zadania wyświetli się okno z parametrami danej procedury:• zadanie ISOK_height_filter (ryc. 14) - algorytm dedykowany klasyfikacji roślinności (Height Filter) został
zaprojektowany tak, aby rozdzielać chmurę punktów ALS na trzy predefiniowane podzbiory na podsta-wie wysokości względem klasy 2 – Ground. W przypadku klasy o numerze 3 – Low Vegetation (roślinność niska) przedział obejmuje zakres 0,0 ÷ 0,4 m, dla klasy o numerze 4 – Medium Vegetation (roślinność śred-nia) przyjęto 0,4 ÷ 2,0 m, a dla klasy 5 – High Vegetation (roślinność wysoka) określono wartość powyżej 2,0 m od powierzchni TIN generowanej z punktów leżących na gruncie (2 – Ground);
• zadanie ISOK_building (ryc. 15) - algorytm Planar Point Filter wyszukuje wśród punktów zaklasyfiko-wanych do klasy roślinność wysoka płaszczyzny reprezentujące dachy budynków, m.in. na podstawie zdefiniowanej minimalnej powierzchni płaszczyzny oraz zakresu kąta nachylenia płaszczyzn. Punkty znajdujące się w obrębie płaszczyzny przenosi do klasy budynki.
5. Kliknij ikonę Execute Taks for a Project na pasku narzędziowym LP360 Point Cloud Task (ryc. 6), aby uru-chomić makro w obrębie całego projektu. W wyniku działania algorytmów powstaną kolejne klasy, do których przypisywane będą punkty reprezentujące roślinność (3 – Low Vegetation, 4 – Medium Vegetation, 5 – High Vegetation) oraz budynki (6 – Building).
Ryc. 12. Miejsce wyboru aktywnej warstwy na pasku narzędziowym LP360
Ryc. 13. Odznaczona warstwa LAS Layer_1 w oknie Table Of Contents

3. Opracowanie danych pochodzących z lotniczego skanowania laserowego
46
6. Wybierz funkcję Define the 3D Window’s Extent (ryc. 7) w celu wyświetlania danych LiDAR w oknie 3D. Punkty klas: 3 – Low Vegetation, 4 – Medium Vegetation, 5 – High Vegetation oznaczone są w nim odcieniami zieleni, a punkty klasy 6 – Building oznaczone są kolorem czerwonym.
7. Wyniki z automatycznej klasyfikacji danych LiDAR muszą przejść manualną weryfikację i korektę, co zosta-nie uczynione w następnym etapie.
Ryc. 14. Parametry klasyfikacji punktów roślin-ności
Ryc. 15. Parametry pozwalające na klasyfikację budynków

3.4. Proces klasyfikacji chmury punktów LiDAR oraz weryfikacji jakościowej
47
3.4.5. Manualna reklasyfikacja chmury punktów LiDAR
1. Przykładowe punkty błędnie sklasyfikowane zostały zaznaczone w pliku bledy_vegbuil.shp, znajdującym się w projekcie niniejszego ćwiczenia, gdzie w tabeli atrybutów w kolumnie Comment oznaczono błędy klasyfikacji (20 poligonów). Włącz widoczność tej warstwy, zaznaczając kwadracik z lewej strony nazwy bledy_vegbuil.shp, a następnie kliknij prawym przyciskiem myszy na nazwę i wybierz Open Attribute Table, aby zapoznać się z przypisanymi atrybutami poszczególnych poligonów. Błędy dla klasy 6 – Building zostały oznaczone cyfrą 6, natomiast błędy związane z klasą 1 – Unclassified zostały oznaczone cyfrą 1.
2. W oknie Table pliku bledy_vegbuil.shp zaznacz wiersz z id równym 20 (wybrany wiersz zostanie podświetlony).
3. Kliknij prawym przyciskiem myszy na nazwę bledy_vegbuil.shp w oknie Table of Contents aplikacji ArcMap i wybierz Selection >> Zoom To Selected Features. Tym samym okno mapy zostanie przybliżone do obsza-ru ze wskazaniem błędu klasyfikacji.
4. W celu sprawdzenia poprawności wykonanej klasyfikacji, zwizualizuj przekrój poprzeczny chmury punk-tów ALS na obszarze z błędem klasy 6 – Building. Wykorzystaj funkcję Draw a profile line (ryc. 16), znajdu-jącą się na pasku narzędziowym LP360 Viewer Integration, rysując linię profilu w obszarze widoku okna mapy dla obranego błędu z pliku bledy_vegbuil.shp o atrybucie id równym 20.
5. Część punktów reprezentujących klasę 6 – Building błędnie zaliczono do trzech klas roślinności (ryc. 17; nr 1). W celu przeprowadzenia edycji błędów automatycznej klasyfikacji należy skorzystać z narzędzi ma-nualnej klasyfikacji, dostępnych w oknie profilu (ryc. 17; nr 2).
6. W celu zmiany przynależności punktów do klasy skorzystaj z odpowiednich narzędzi umożliwiających ich selekcję (ryc. 18; nr 1). Są one dostępne w pasku narzędziowym okna Profile Window. Po zaznaczeniu błędnie sklasyfikowanych punktów należy wskazać dla nich klasę docelową (ryc. 18 nr 2), tj. 6 – Building, a następnie zatwierdzić klawiszem spacji.
Ryc. 16. Pasek narzędziowy LP360 Viewer Integration z zaznaczoną ikoną rysowania profili
Ryc. 17. Okno profilu z narzędziami manualnej klasyfikacji chmur punktów ALS wraz z zaznaczonymi błędami klasyfikacji w obszarze id = 20
1
2
Ryc. 18. Pasek narzędziowy okna Profile Window wraz z narzędziami zaznaczania selekcji punktów
1 2

3. Opracowanie danych pochodzących z lotniczego skanowania laserowego
48
7. Poprawa błędnie przeprowadzonej klasyfikacji może dotyczyć także klasy 1 – Unclassified (ryc. 19; id = 1 w pliku wektorowym bledy_vegbuil.shp). Bardzo częstym przypadkiem jest błędne przyporządkowanie punktów reprezentujących linię energetyczną do klasy 5 – High Vegetation lub 6 – Building. Przenieś punkty przypisane do linii energetycznej do docelowej klasy 1 – Unclassified.
8. Popraw w analogiczny sposób wszystkie zidentyfikowane błędy automatycznej klasyfikacji danych LiDAR.
3.4.6. Podsumowanie
Ćwiczenie polegało na sklasyfikowaniu chmury punktów LiDAR do klas:• reprezentującej punkty niskie i szumy (7 – Low Point);• reprezentującej punkty leżące na gruncie (2 – Ground);• reprezentującej punkty roślinności (3 – Low Vegetation, 4 – Medium Vegetation, 5 – High Vegetation);• reprezentującej punkty należące do budynków (6 – Building).
W pierwszej części ćwiczenia sklasyfikowano punkty leżące na gruncie (2 – Ground), punkty niskie oraz punkty należące do klasy szumy (7 – Low Point). Kolejnym etapem klasyfikacji była manualna poprawa wstęp-nie sklasyfikowanej klasy 2 – Ground, wykonana w celu przeniesienia jeszcze nieodfiltrowanych szumów do klasy 7 – Low Point. Następnie dokonano automatycznej klasyfikacji roślinności (3 – Low Vegetation, 4 – Medium Vegetation, 5 – High Vegetation) i budynków (6 – Building). Ostatnim etapem była manualna korekta wynikowej chmury punktów LiDAR.
Automatyczną i manualną klasyfikację danych LiDAR można wykonać również w innych programach do przetwarzania danych LiDAR.
Ryc. 19. Przykład błędnie sklasyfikowanej linii energetycznej: punkty w kolorze zielonym i czerwonym
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................

49
4. Produkty LiDAR i produkty pochodne
4.1. Proces generowania NMT na podstawie danych pochodzących z lotniczego skanowania laserowego
Celem ćwiczenia jest wygenerowanie NMT na podstawie sklasyfikowanej chmury punktów z lotniczego ska-nowania laserowego. Uczestnik podczas zajęć dokona filtracji danych LiDAR oraz wykona cieniowany model rzeźby terenu zbudowany w locie na podstawie punktów należących do klasy grunt.
Szacowany czas wykonania ćwiczenia: 15 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\04_01_LP360
• 04_01_LP360.mxd – projekt mapy, zapisany w oprogramowaniu ArcMap;• N-33-91-C-c-3-1-2-2.las – sklasyfikowana chmura punktów ALS w formacie LAS 1.2 Point Data
Record Format 3.
Obszar: Klępino (powiat stargardzki, województwo zachodniopomorskie)
Oprogramowanie: LP360 (QCoherent), ArcMap (Esri)
ETAPY REALIZACJI ĆWICZENIA
4.1.1. Filtracja i wizualizacja danych
1. Uruchom gotowy projekt 04_01_LP360.mxd, znajdujący się w folderze ćwiczeniowym. W oknie programu znajduje się wyświetlona chmura punktów ALS.
2. W celu dokonania filtracji i wyświetlenia w oknie programu ArcMap wyłącznie punktów należących do klasy 2 – Ground, skorzystaj z narzędzi filtracji widoku dostępnych w pasku narzędziowym LP360 (wybierz w tym celu filtr o nazwie Ground; ryc. 1; nr 1).
3. Dodatkowo, poprzez zmianę typu wizualizacji na wyświetlenie chmury punktów z wykorzystaniem modelu TIN, możesz zobaczyć zbudowany w locie model TIN (ryc. 1; nr 2).
4.1.2. Generowanie NMT
1. W programie LP360 numeryczny model terenu wygeneruj z użyciem narzędzi dostępnych w pasku narzę-dziowym LP360 (ryc. 1; nr 3).
Ryc. 1. Pasek narzędziowy LP360
3 2 1

4. Produkty LiDAR i produkty pochodne
50
2. Po wybraniu narzędzia Export LiDAR Data, dostępnego w pasku narzędziowym LP360, zostanie wyświe-tlone okno eksportu danych LP360 Export Wizard. W oknie tym należy ustawić:• Export Type (menu pozwalające na wybór typu eksportu): Surface (ryc. 2; nr 1),• Cellsize (pole definiujące rozmiar siatki GRID): 1.0000 Map Units (ryc. 2; nr 2),• Surface Attributes(s) to Export (menu pozwalające na wybór eksportowanego atrybutu): Elevation
(ryc. 2; nr 3),• Export Format (menu umożliwiające wybór rozszerzenia eksportowanego pliku): Binary Raster (ryc. 2; nr 4),• Parametry filtracji (Filter…; ryc. 2; nr 5). Jest to jeden z najważniejszych parametrów pozwalający na
generowanie modelu wysokościowego na podstawie punktów należących do klasy 2 – Ground.
3. W celu zdefiniowania filtracji, w wyświetlonym oknie Filter w zakładce Classifications wybierz klasę 2 – Ground (ryc. 3; nr 1) i naciśnij OK (ryc. 3; nr 2).
Ryc. 2. Okno ustawiania parametrów generowania NMT
15
2
3 4
Ryc. 3. Okno filtracji danych LiDAR
1
2
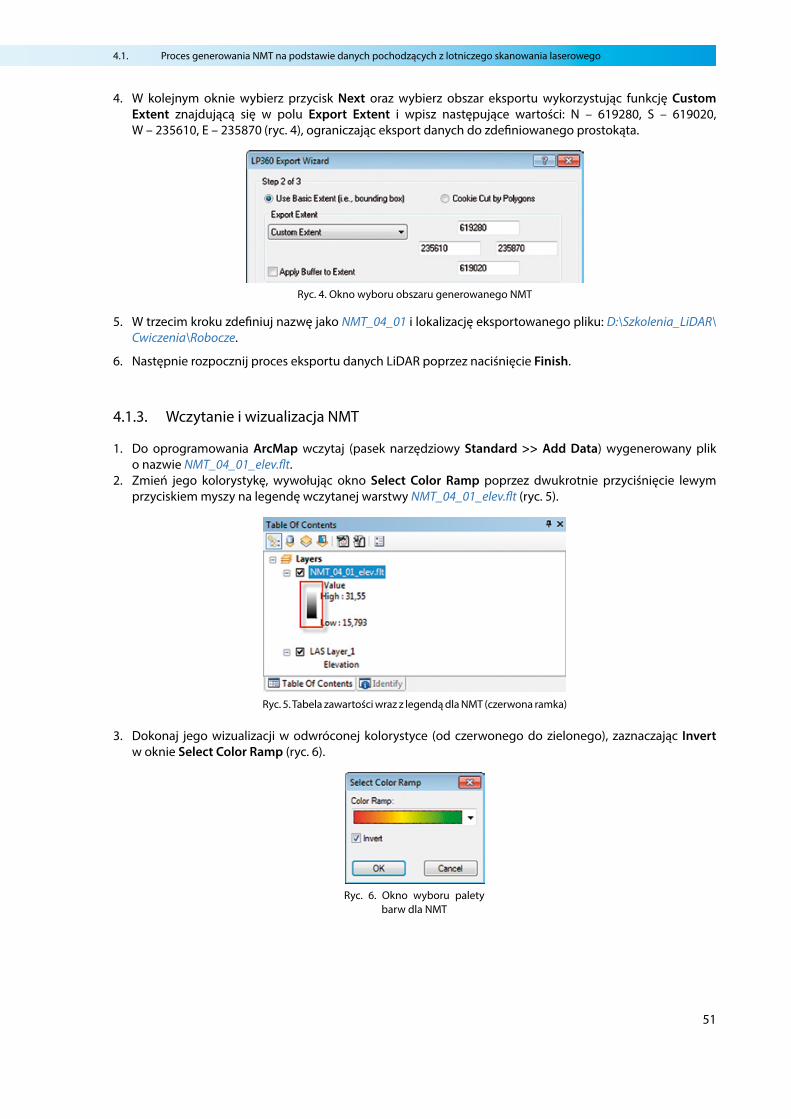
4.1. Proces generowania NMT na podstawie danych pochodzących z lotniczego skanowania laserowego
51
4. W kolejnym oknie wybierz przycisk Next oraz wybierz obszar eksportu wykorzystując funkcję Custom Extent znajdującą się w polu Export Extent i wpisz następujące wartości: N – 619280, S – 619020, W – 235610, E – 235870 (ryc. 4), ograniczając eksport danych do zdefiniowanego prostokąta.
5. W trzecim kroku zdefiniuj nazwę jako NMT_04_01 i lokalizację eksportowanego pliku: D:\Szkolenia_LiDAR\Cwiczenia\Robocze.
6. Następnie rozpocznij proces eksportu danych LiDAR poprzez naciśnięcie Finish.
4.1.3. Wczytanie i wizualizacja NMT
1. Do oprogramowania ArcMap wczytaj (pasek narzędziowy Standard >> Add Data) wygenerowany plik o nazwie NMT_04_01_elev.flt.
2. Zmień jego kolorystykę, wywołując okno Select Color Ramp poprzez dwukrotnie przyciśnięcie lewym przyciskiem myszy na legendę wczytanej warstwy NMT_04_01_elev.flt (ryc. 5).
3. Dokonaj jego wizualizacji w odwróconej kolorystyce (od czerwonego do zielonego), zaznaczając Invert w oknie Select Color Ramp (ryc. 6).
Ryc. 4. Okno wyboru obszaru generowanego NMT
Ryc. 5. Tabela zawartości wraz z legendą dla NMT (czerwona ramka)
Ryc. 6. Okno wyboru palety barw dla NMT

4. Produkty LiDAR i produkty pochodne
52
4.1.4. Wizualizacja modelu cieniowanej rzeźby
1. Wykorzystując narzędzie Image Analysis, dostępne w Menu Głównym >> Windows programu ArcMap, w szybki sposób wyświetlisz model cieniowanej rzeźby.
2. W oknie Image Analysis zaznacz nazwę NMT_04_01_elev.flt, a w obszarze Processing wybierz paletę barw od zielonego do czerwonego (ryc.7; nr 1) i przyciśnij ikonę Shaded Relief (ryc. 7; nr 2).
3. W oknie mapy zostanie wyświetlony model cieniowanej rzeźby terenu.
4.1.5. Podsumowanie
W ćwiczeniu dzięki wykorzystaniu sklasyfikowanej chmury punktów dla klasy 2 – Ground, przeprowadzono filtrację widoku danych ALS celem zaprezentowania eksportowanej powierzchni. W kolejnym kroku przepro-wadzono generowanie NMT o oczku GRID 1,0 m i wizualizację w postaci modelu cieniowanej rzeźby terenu.
Ryc. 7. Okno Image Analysis z za-znaczonymi opcjami pozwalają-cymi na wygenerowanie modelu
cieniowanej rzeźby terenu
1 2
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

4.2. Proces generowania NMPT na podstawie danych pochodzących z lotniczego skanowania laserowego
53
4.2. Proces generowania NMPT na podstawie danych pochodzących z lotniczego skanowania laserowego
Celem ćwiczenia jest zdobycie umiejętności z zakresu generowania numerycznego modelu pokrycia terenu na podstawie danych ALS. W pierwszym etapie zostanie przekazana wiedza z zakresu filtracji danych oraz ich parametryzacji. W etapie drugim zostanie wygenerowany NMPT oraz przekazanie wiadomości z zakresu moż-liwości wizualizacji modelu i eksportu do formatu FLT.
Szacowany czas wykonania ćwiczenia: 15 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\04_02_SAGA
• 04_02_SAGA.sprj – projekt mapy, zapisany w oprogramowaniu SAGA;• N-33-91-C-c-3-1-2-1.las – sklasyfikowana chmura punktów w formacie LAS 1.2 Point Data Record
Format 3.
Obszar: Klępino (powiat stargardzki, województwo zachodniopomorskie)
Oprogramowanie: SAGA
ETAPY REALIZACJI ĆWICZENIA
4.2.1. Filtracja danych
1. Otwórz projekt o nazwie 04_02_SAGA.sprj, znajdujący się w folderze 04_02_SAGA. W oknie zawartości znaj-duje się chmura punktów o nazwie N-33-91-C-c-3-1-2-1.
2. W celu wygenerowania NMPT odfiltruj chmurę punktów w taki sposób, aby w klasyfikacji chmury pozostały tylko klasy grunt, niska, średnia i wysoka roślinność oraz klasa budynków i wód. Narzędzie filtracji znajduje się w module Shapes – Point Clouds >> Point Cloud Reclassifier / Subset Extractor. Przeprowadzone zo-staną dwa rodzaje filtracji. Pierwsza z nich będzie dotyczyła selekcji punktów według atrybutu kolejności odbicia. Druga filtracja zostanie przeprowadzona ze względu na klasyfikację.
3. W Point Cloud wybierz chmurę, która zostanie poddana filtracji N-33-91-C-c-3-1-2-1 (ryc. 1; nr 1). Następnie wskaż atrybut, według którego zostanie przeprowadzona filtracja: numer odbicia lasera (number of returns of given pulse; ryc. 1; nr 2).
4. W celu pozostawienia w chmurze echa pierwszego odbicia i usunięcia pozostałych ech, wskaż tryb pracy (mode of operation) ekstrakcja (Extract Subset) i metodę pojedynczych wartości single (ryc. 1; nr 3, 4). Ta metoda pozwoli wskazać numer odbicia echa w rubryce old value. Wpisz wartość 1 (ryc. 1; nr 5), aby pozostawić w chmurze tylko pierwsze odbicie. Zatwierdź polecenie (ryc. 1; nr 6).
Ryc. 1. Okno dialogowe, w którym możliwe jest przeprowadzenie filtracji chmury punktów
12
345
6

4. Produkty LiDAR i produkty pochodne
54
5. W celu zwizualizowania efektu polecenia, wskaż w oknie zawartości warstwę N-33-91-C-c-3-1-2-1_subset_number of returns of given pulse. W bocznym oknie programu pojawi się okno właściwości. Zwizualizuj efekt polecenia, wskazując atrybut warstwy number of returns of given pulse (ryc. 2).
6. Druga filtracja zostanie przeprowadzona ze względu na klasyfikację. Odfiltruj wszystkie klasy za wyjątkiem gruntu, niskiej, średniej i wysokiej roślinności, budynków oraz klasy wód. Użyj tego samego narzędzia, które zastosowałeś w pierwszej filtracji: Shapes – Point Clouds >> Point Cloud Reclassifier / Subset Extractor.
7. Jako Point Cloud wskaż N-33-91-C-c-3-1-2-1_subset_number of returns of given pulse. Opcję Attribute ustaw na classification. Zmień metodę na simple table, co pozwoli na zdefiniowanie wytycznych w formie tabeli. W rubryce Lookup Table wpisz wartości jak na ryc. 3 – w ten sposób wybieramy klasy punktów. Pozostałe ustawienia pozostaw domyślne.
8. Wyświetl chmurę punktów, gotową do wygenerowania NMPT, za pomocą polecenia Add to map, a we właściwościach warstwy zaznacz sposób wyświetlania poprzez atrybut classification (ryc. 4).
Ryc. 2. Wizualizacja chmury punktów przy ekstrakcji jednego odbicia wiązki lasera
Ryc. 3. Okno dialogowe umożliwiające wprowadzenie zakresu ekstrakcji klas chmury punktów

4.2. Proces generowania NMPT na podstawie danych pochodzących z lotniczego skanowania laserowego
55
4.2.2. Generowanie NMPT
1. Ze względu na to, że do wykonania NMPT używamy tylko punktów z pierwszego odbicia, w chmurze punk-tów pojawiają się luki. Poddaj interpolacji obszar, aby był jednorodny. W tym celu zamień chmurę punktów na raster za pomocą modułu Shapes – Point Cloud >> Point Cloud to Grid (ryc. 5).
2. W oknie dialogowym wskaż chmurę punków o nazwie N-33-91-C-c-3-1-2-1_subset_number of returns of given pulse_subset_classification, a w rubryce Aggregation wybierz highest z. Zatwierdź polecenie.
3. Tak wygenerowany raster interpoluj za pomocą narzędzia Grid – Tools >> Close Gaps (ryc. 6); wskaż raster o nazwie N-33-91-C-c-3-1-2-1_subset_number of returns of given pulse_subset_classification[Z].
4. W celu wizualizacji NMPT skorzystaj z funkcji Analytical Hillshading do generowania cieniowanego modelu rzeźby terenu (ryc. 7). Narzędzie to znajduje się w module Terrain Analysis – Lighting, Visibility. W oknie dialogowym wskaż raster o nazwie N-33-91-C-c-3-1-2-1_subset_number of returns of given pulse_subset_classification[Z]. Inne opcje pozostaw domyślne.
Ryc. 4. Wizualizacja chmury punktów przy użyciu atrybutu classification
Ryc. 5. Konwersja chmury punktów do rastra
Ryc. 6. Interpolacja rastra za pomocą funkcji Close Gaps

4. Produkty LiDAR i produkty pochodne
56
4.2.3. NMPT w widoku 3D
1. W celu wykonania wizualizacji NMPT w 3D wskaż w oknie górnym funkcję 3D N-33-91-C-c-3-1-2-1_subset_number of returns of given pulse_subset_classification[Z], przewyższenie (Exaggeration) wartość 3, rozdzielczość (Resoulution) 1500. Zatwierdź polecenie – w oknie 3D zostanie zwizualizowany NMPT (ryc. 8).
2. Do poprawy jakości obrazu skorzystaj z właściwości wizualizowanej warstwy N-33-91-C-c-3-1-2-1_subset_number of returns of given pulse_subset_classification[Z] oraz Analytical Hillshading i wskaż w opcjach Display >> Interpolation funkcję B-Spline. Przeprowadzenie interpolacji pozwoli wygładzić piksele. Następnie ponownie zwizualizuj warstwę w widoku 3D.
3. Tak przygotowany model zapisz korzystając z paska górnego 3D View >> Save as Image.
Ryc. 7. Cieniowany model rzeźby terenu
Ryc. 8. Wizualizacja NMPT w oknie 3D

4.2. Proces generowania NMPT na podstawie danych pochodzących z lotniczego skanowania laserowego
57
4.2.4. Eksport NMPT do formatu ESRI Arc/Info Grid
1. SAGA posiada możliwość eksportu danych rastrowych do różnych formatów. Wyeksportuj NMPT do forma-tu ASC, korzystając z modułu Import/Export – Grids >> Export ESRI Arc/Info Grid.
2. W oknie dialogowym wskaż eksportowany model (ryc. 9; nr 1-2), pozostaw format eksportu Format: ASCII (ryc. 9; nr 3). Ustaw ścieżkę zapisu danych (ryc. 8; nr 4) i wpisz nazwę pliku ‘NMPT’. Naciśnij Zapisz, a następnie Okay.
4.2.5. Podsumowanie
Ćwiczenie polegało na wygenerowaniu numerycznego modelu pokrycia terenu na podstawie chmury punk-tów ALS. W pierwszym etapie chmura punktów została odfiltrowana. Pozostawiono tylko punkty z pierwszym odbiciem i sklasyfikowane jako:
• grunt,• roślinność niska,• roślinność średnia,• roślinność wysoka,• budynki,• woda.
W drugim kroku wygenerowano NMPT oraz poddano interpolacji w celu wygładzenia pikseli. Następnie gotowy model zwizualizowano w oknie 3D.
Ryc. 9. Okno dialogowe eksportu danych
12
34
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

4. Produkty LiDAR i produkty pochodne
58
4.3. Generowanie profili terenowych
Ćwiczenie pozwoli nabyć praktyczne umiejętności z zakresu generowania profili terenowych. Zostaną wyko-nane pojedyncze profile i przekroje terenowe na danych typu NMT, NMPT oraz na chmurze punktów ALS. Ponadto wygenerowane profile pozwolą na wykonanie pomiarów drzewostanu/budynku.Szacowany czas wykonania ćwiczenia: 20 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\04_03_ArcMap
• 04_03_ArcMap.mxd – projekt mapy zapisany w oprogramowaniu ArcMap;• NMPT_ N-33-91-C-c-3-1.asc – numeryczny model pokrycia terenu w formacie ArcInfo ASCII GRID,
o rozdzielczości 0,5 m;• NMT_ N-33-91-C-c-3-1.asc – numeryczny model terenu w formacie ArcInfo ASCII GRID, o rozdziel-
czości 0,5 m;• Klepino.lasd – LAS Dataset;• sklasyfikowane chmury punktów w formacie LAS 1.2 Point Data Record Format 3:
− N-33-91-C-c-3-1-2-1.las; − N-33-91-C-c-3-1-2-2.las; − N-33-91-C-c-3-1-2-3.las; − N-33-91-C-c-3-1-2-4.las; − N-33-91-C-c-3-2-1-1.las; − N-33-91-C-c-3-2-1-3.las.
Obszar: Klępino (powiat stargardzki, województwo zachodniopomorskie)
Oprogramowanie: ArcMap (Esri)
ETAPY REALIZACJI ĆWICZENIA
4.3.1. Otwarcie dokumentu mapy i eksploracja danych
1. Uruchom przygotowany projekt 04_03_ArcMap.mxd, który znajduje się w folderze ćwiczeniowym 04_03_ArcMap.
2. W przygotowanym projekcie znajdują się 2 bloki: NMPT_N-33-91-C-c-3-1.asc i NMT_N-33-91-C-c-3-1.asc. Włącz warstwę NMPT w tabeli zawartości (ryc. 1).
4.3.2. Wykonanie pojedynczych profili terenowych na NMT i NMPT
1. Wykonanie profili terenowych możliwe jest za pomocą paska narzędziowego 3D Analyst (ryc. 2).
Ryc. 1. Aktywowanie w oknie widoku warstwy NMPT
Ryc. 2. Pasek narzędziowy 3D Analyst
1 2 3

4.3. Generowanie profili terenowych
59
2. Skorzystaj z paska narzędziowego 3D Analyst. W menu rozwijalnym wskaż warstwę NMPT (ryc. 2; nr 1). Użyj narzędzia Interpolate Line (ryc. 2; nr 2) i narysuj profil w oknie mapy. Postaraj się poprowadzić profil przez koryto rzeki. Po narysowaniu linii kliknij dwukrotnie, aby zakończyć rysowanie profilu. W oknie widoku pojawi się czarna linia (ryc. 3).
3. W celu wyświetlenia okna profilu aktywuj narysowaną linię poprzez wskazanie jej narzędziem Select Elements, znajdującym się w pasku narzędziowym Tools (ryc. 4).
4. Skorzystaj z paska narzędziowego 3D Analyst i użyj narzędzia Profile Graph (ryc. 2; nr 3). W oknie mapy pojawi się dodatkowe okno profilu (ryc. 5).
Na wygenerowanym profilu widać koryto rzeki (ryc. 5; nr 1) oraz zadrzewienia (ryc. 5; nr 2).
5. Wykonaj taki sam profil dla NMT, pamiętając o zmianie warstwy w menu rozwijalnym paska narzędziowe-go 3D Analyst na NMT_ N-33-91-C-c-3-1.asc (ryc. 2). Zwizualizuj profil za pomocą narzędzia Profile Graph (ryc. 6). Na profilu wyznaczyć można miejsce przebiegu koryta rzeki; nie jest jednak widoczna roślinność (jak na NMPT).
Ryc. 3. Narysowany profil na NMPT
Ryc. 4. Pasek narzędziowy Tools
Ryc. 5. Okno profilu wykonanego na podstawie NMPT
2 1 2

4. Produkty LiDAR i produkty pochodne
60
4.3.3. Wykonanie profilu terenowego dla danych ALS
1. Włącz wyświetlanie warstwy Klepino.lasd w tabeli zawartości, aby wykonać profil terenowy dla danych ALS.
2. Do pracy przy chmurze punktów posłuż się paskiem narzędziowym LAS Dataset. W celu jego uruchomie-nia, kliknij na górnym pasku narzędziowym prawym klawiszem myszy i wybierz z listy pasek narzędziowy LAS Dataset (ryc. 7).
3. Posłuż się narzędziem LAS Dataset Profile View (ryc. 7; nr 2) do narysowania profilu. Po rozpoczęciu ryso-wania profilu poprzez kliknięcie wskaż punkt początkowy, kolejnym kliknięciem zatwierdź jego długość, a następnym szerokości profilu (ryc. 8).
4. Po zaznaczeniu profilu automatycznie wyświetla się okno profilu (ryc. 9).
Ryc. 6. Okno profilu wykonanego na podstawie NMT
Ryc. 7. Pasek narzędziowy LAS Dataset
1 2
Ryc. 8. Rysowanie profilu na danych ALS

4.3. Generowanie profili terenowych
61
4.3.4. Pomiar wysokościowy drzewostanu/budynków na danych LiDAR
1. Zmień sposób wyświetlania chmury punktów na klasyfikację. Obok menu rozwijalnego (ryc. 7; nr 1) znajdu-je się narzędzie do zmiany sposobu wyświetlania. Domyślnie ustawiony jest sposób wyświetlania punktów po wysokości (elevation) – zmień go na klasyfikację (class).
2. Do pomiaru wysokości drzew/budynków służy narzędzie Measure (ryc. 10).
3. Posłuż się oknem profilu, aby dokonać pomiaru drzewostanu/budynku:• w górnym pasku narzędziowym wskaż narzędzie Measure (ryc. 10);• kliknij kursorem u podstawy drzewa i przeciągnij kursorem do jego górnej części korony;• pod górnym paskiem narzędziowym pojawią się informacje dotyczące dokonanego pomiaru (ryc. 9);• powtórz pomiar dla budynków.
4.3.5. Podsumowanie
W ćwiczeniu wygenerowano profile terenowe dla numerycznego modelu pokrycia terenu i numerycznego modelu terenu. Dokonano porównania obu profili poprzez wskazanie koryta rzeki. Ponadto wygenerowano profil dla chmury punktów oraz dokonano pomiarów wysokościowych na przykładzie drzewa.
Ryc. 9. Dokonanie pomiaru na profilu terenowych wygenerowanym na podstawie chmury punktów
Ryc. 10. Narzędzia okna profilu
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................

4. Produkty LiDAR i produkty pochodne
62
4.4. Generowanie zNMPT jako modelu różnicowego na podstawie NMPT oraz NMT
Ćwiczenie ma na celu przekazanie praktycznych umiejętności z zakresu generowania znormalizowanego modelu pokrycia terenu (zNMPT) na podstawie produktów pochodnych z lotniczego skanowania laserowego. Ponadto zNMPT jako model różnicowy NMPT i NMT, zostanie wyeksportowany do formatu ASCII.
Szacowany czas wykonania ćwiczenia: 30 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\04_04_SAGA
• 04_04_SAGA.sprj – projekt mapy, zapisany w oprogramowaniu SAGA;• NMT.sgrd – numeryczny model terenu, wykonany na podstawie chmury punktów ALS;• NMPT.sgrd – numeryczny model pokrycia terenu, wykonany na podstawie chmury punktów ALS.
Obszar: Klępino (powiat stargardzki, województwo zachodniopomorskie)
Oprogramowanie: SAGA
ETAPY REALIZACJI ĆWICZENIA
4.4.1. Otworzenie projektu
1. Otwórz projekt 04_04_SAGA.sprj. W oknie zawartości znajdują się NMPT i NMT, które posłużą wygenerowa-niu znormalizowanego modelu pokrycia terenu.
2. Znormalizowany numeryczny model pokrycia terenu (zNMPT) jest wynikiem odejmowania NMPT i NMT lub generowany jest na podstawie znormalizowanej chmury punktów ALS.
4.4.2. Wykonanie funkcji odejmowania dwóch modeli
1. Generowanie zNMPT wykonaj za pomocą narzędzia dostępnego w modułach programu SAGA, Grid – Calculus >> Grid Difference.
W oknie dialogowym zdefiniuj jakie modele będą podlegały działaniom matematycznym. Jako model A wskaż NMPT, jako model B wskaż NMT, a następnie zaakceptuj polecenie (ryc. 2).
Ryc. 1. Moduły biblioteki SAGA

4.4. Generowanie zNMPT jako modelu różnicowego na podstawie NMPT oraz NMT
63
2. Wynikowym modelem jest zNMPT domyślnie nazwany Difference (A-B). Zatwierdź.
4.4.3. Zmiana formatów danych i ich eksport
1. Formaty, do których można eksportować dane rastrowe z programu SAGA, to m.in.: Surfer Grid, SHP, Bitmap, formaty binarne, ASCII. Ponadto można zapisać obraz w formacie TIFF, JPG, PNG itd. W tym ćwicze-niu należy wyeksportować dane rastrowe do formatu ASCII.
2. W zakładce Modules znajdź moduł Import/Eksport- Grids >> Export Grid to XYZ (ryc. 3), aby dokonać eksportu danych ASCII. Pojawi się okno dialogowe, gdzie wybierz raster, który zostanie przekonwertowany na ASCII (ryc. 3; nr 1-2). Zatwierdź polecenie (ryc. 3; nr 3).
3. Sprawdź, czy plik został prawidłowo przekonwertowany. Ponownie załaduj go do programu poprzez po-lecenie Import/Eksport – Grid >> Import Grid from XYZ. Wyświetl dane w oknie roboczym. Wskaż dane w oknie zawartości, a następnie kliknij prawym klawiszem myszy i użyj polecenia Add to map, klikając prawym klawiszem myszy na zaimportowany model.
4.4.4. Analiza wartości utworzonych modeli
1. W celu analizy wartości wszystkich modeli: NMT, NMPT i zNMPT wyświetl wszystkie modele wysokościowe w oknie mapy za pomocą polecenia Add to map (klikając prawym klawiszem myszy na dostępne modele).
2. Porównanie map odbędzie się poprzez odczytanie wartości wysokości Z w tym samym miejscu na każdej z map. Wartość Z odczytaj z dolnego paska interfejsu oprogramowania (ryc. 4–6).
Ryc. 2. Okno dialogowe do kreowania znormalizowanego modelu pokrycia terenu
Ryc. 3. Okno dialogowe do eksportu rastrów do formatu ASCII
12
3

4. Produkty LiDAR i produkty pochodne
64
3. Najedź kursorem myszy na miejsce wskazane na NMPT jak na ryc. 4.
4. Wartość wysokości we wskazanym strzałką miejscu wynosi 31.43. Sprawdź wartość wysokości w tym samym miejscu na NMT.
5. Wartość wysokości w miejscu wskazanym strzałką wynosi 18.89.
6. Ponieważ zNMPT to różnica modeli NMPT i NMT, wartość wysokości również powinna stanowić różnicę. Sprawdź, jaka jest wartość wysokości w miejscu wskazanym strzałką na wygenerowanym zNMPT.
Ryc. 4. Sprawdzenie wartości wysokości wybranego punktu na NMPT
Ryc. 5. Sprawdzenie wartości wysokości wybranego punktu na NMT

4.4. Generowanie zNMPT jako modelu różnicowego na podstawie NMPT oraz NMT
65
7. Sprawdzona wartość wysokości powinna wynosić 12.54, jak na rycinie 6. Wartość ta jest jednocześnie róż-nicą odczytanych wcześniej wysokości:
31.43–18.89 = 12.54
8. Analiza modeli oraz dokonanie działania matematycznego pozwala na sprawdzenie poprawności wygene-rowanego znormalizowanego numerycznego modelu terenu.
4.4.5. Podsumowanie
Celem ćwiczenia było wykonanie znormalizowanego numerycznego modelu pokrycia terenu (zNMPT). W pierw-szym etapie wykonano działanie matematyczne na modelach – odjęto numeryczny model terenu od numerycz-nego modelu pokrycia terenu. W drugim etapie dokonano eksportu modelu wynikowego do formatu ASCII.
Ryc. 6. Sprawdzenie wartości wysokości wybranego punktu na zNMPT
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

4. Produkty LiDAR i produkty pochodne
66
4.5. Generowanie rastrowych produktów pochodnych NMT i NMPT
Numeryczne modele wysokościowe znajdują zastosowanie w rozwiązywaniu różnorodnych zagadnień in-żynierskich, projektowych czy wizualizacyjnych. W ramach tego ćwiczenia uczestnik zapozna się z genero-waniem rastrowych produktów pochodnych w postaci modeli spadków, ekspozycji oraz cieniowanej rzeźby z danych numerycznego modelu terenu oraz numerycznego modelu pokrycia terenu.
Szacowany czas wykonania ćwiczenia: 15 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\04_05_QGIS
• 04_05_QGIS.qgs – projekt mapy, zapisany w oprogramowaniu QGIS;• NMT_M-34-89-D-b-4-4.asc – numeryczny model terenu w formacie ArcInfo ASCII GRID, o rozdziel-
czości 0,5 m;• NMPT_M-34-89-D-b-4-4.asc – numeryczny model pokrycia terenu w formacie ArcInfo ASCII GRID,
o rozdzielczości 0,5 m;• ekspozycja_kolorystyka.qml – plik zdefiniowanej symboliki dla warstwy ekspozycji.
Obszar: Pieniny
Oprogramowanie: QGIS (OSGeo)
ETAPY REALIZACJI ĆWICZENIA
4.5.1. Rozpoczęcie pracy
1. Uruchom gotowy projekt 04_05_QGIS.qgs, znajdujący się w folderze 04_05_QGIS.
2. W oknie aplikacji QGIS (ryc. 1) znajdują się warstwy rastrowe numerycznego modelu terenu (NMT_M-34-89-D-b-4-4.asc) oraz numerycznego modelu pokrycia terenu (NMPT_M-34-89-D-b-4-4.asc).
Ryc. 1. Okno główne oprogramowania QGIS

4.5. Generowanie rastrowych produktów pochodnych NMT i NMPT
67
4.5.2. Wygenerowanie modelu cieniowanej rzeźby na podstawie NMT
1. W celu wygenerowania warstwy cieniowanej rzeźby przejdź do menu Raster, następnie Analiza i Nume-ryczny Model Terenu (ryc. 2).
2. W pojawiającym się oknie (ryc. 3) wskaż plik wejściowy w postaci warstwy NMT_M-34-89-D-b-4-4.asc (ryc. 3; nr 1) i plik wyjściowy wraz ze ścieżką dostępu. Po naciśnięciu przycisku Wybierz wskaż ścieżkę do danych z ćwiczenia, a następnie jako nazwę pliku wpisz hillshade.asc (ryc. 3; nr 2). W polu Generuj wybierz pozycję Cień (ryc. 3; nr 3). Generując warstwę cieniowanej rzeźby terenu istnieje możliwość ustawienia azymutu światła (ryc. 3; nr 4) oraz wysokości światła nad horyzontem (ryc. 3; nr 5). W obu przypadkach po-zostawiono wartości domyślne. Zaznacz opcję Wyświetl po zakończeniu.
3. Po naciśnięciu przycisku OK wygenerowana zostanie warstwa wynikowa, która następnie automatycznie zostanie dodana do okna zawartości. Zakończenie pracy algorytmu zostanie zakomunikowane pojawiają-cym się oknem (ryc. 4).
Ryc. 2. Narzędzie tworzenia rastrowych warstw pro-duktów pochodnych
Ryc. 3. Opcje generowania warstwy rzeźby terenu
1
2
3
4
5

4. Produkty LiDAR i produkty pochodne
68
4. Po utworzeniu warstwy okno z parametrami nie jest zamykane automatycznie – naciśnij przycisk Zamknij. Wygenerowana warstwa zawiera hipotetyczne oświetlenie powierzchni poprzez określenie wartości oświe-tlenia dla każdej komórki rastra numerycznego modelu terenu.
4.5.3. Wygenerowanie modelu spadków na podstawie NMT
1. W celu wygenerowania warstwy rastrowej spadków terenu, podobnie jak w przypadku tworzenia rzeźby terenu przejdź do opcji Numeryczny Model Terenu (ryc. 2).
2. W oknie narzędzia (ryc. 5) wskaż plik wejściowy w postaci warstwy NMT_M-34-89-D-b-4-4.asc (ryc. 5; nr 1) oraz plik wyjściowy wraz ze ścieżką dostępu.
3. Po naciśnięciu przycisku Wybierz wskaż ścieżkę do danych z ćwiczenia, a następnie jako nazwę pliku wpisz slope.asc (ryc. 5; nr 2). W polu Generuj wybierz pozycję Spadek (ryc. 5; nr 3).
4. W przypadku potrzeby wygenerowania warstwy spadków w procentach (domyślnie generowana jest ona w stopniach), zaznacz w oknie odpowiednie pole (ryc. 5; nr 4). W ćwiczeniu pozostawić należy pole niezaznaczone.
5. Po zatwierdzeniu opcji przyciskiem OK wygenerowana zostanie warstwa wynikowa, która następnie auto-matycznie dodana zostanie do okna zawartości. Warstwa spadku zawiera, dla każdej komórki rastra, mak-symalny stopień zmiany wartości w stosunku do komórek sąsiadujących.
4.5.4. Wygenerowanie modelu ekspozycji na podstawie NMPT
1. W celu wygenerowania warstwy rastrowej spadków terenu, podobnie jak w przypadku tworzenia rzeźby terenu przejdź do opcji Numeryczny Model Terenu (ryc. 2).
2. W oknie uruchomionego narzędzia wskaż jako parametry plik wejściowy w postaci warstwy NMPT_M-34-89-D-b-4-4.asc (ryc. 6; nr 1) oraz plik wyjściowy wraz ze ścieżką dostępu.
Ryc. 4. Komunikat o pomyślnym zakończeniu tworzenia warstwy
Ryc. 5. Opcje generowania warstwy spadków
1
2
3
4

4.5. Generowanie rastrowych produktów pochodnych NMT i NMPT
69
3. Po naciśnięciu przycisku Wybierz wskaż ścieżkę do danych z ćwiczenia, a następnie jako nazwę pliku wpisz aspect.asc (ryc. 6; nr 2). W polu Generuj wybierz pozycję Ekspozycja (ryc. 6; nr 3).
4. Po uruchomieniu narzędzia przy pomocy przycisku OK, zostanie wygenerowana warstwa wynikowa, która następnie automatycznie zostanie dodana do okna zawartości.
5. Utworzona warstwa eskpozycji może sprawiać trudności w interpretacji z powodu domyślnej kolorystyki, jaką są odcienie szarości, w zależności od kierunku spadków. W celu poprawy wyglądu warstwy istnieje możliwość wczytania wcześniej utworzonej symboliki. W tym celu dwukrotnie naciśnij warstwę aspect.asc, aby wywołać okno właściwości warstwy (ryc. 7; nr 1). Następnie w zakładce Styl (ryc. 7; nr 2) naciśnij przy-cisk Wczytaj styl… (ryc. 7; nr 3).
Ryc. 6. Opcje generowania warstwy spadków
1
2
Ryc. 7. Właściwości stylu warstwy
1
2
3
3

4. Produkty LiDAR i produkty pochodne
70
6. W pojawiającym się oknie wczytania stylu warstwy wybierz plik ekspozycja_kolorystyka.qml. Zatwierdź wybór, naciskając klawisz OK. Po chwili symbolika warstwy zostanie zmieniona według wczytanego stylu (ryc. 8).
7. Warstwa ekspozycji, dla każdej komórki rastra identyfikuje kierunek maksymalnej zmiany wartości pomię-dzy analizowanym pikselem a komórkami sąsiadującymi. Po zakończeniu prac, zapisz zmiany w projekcie.
4.5.5. Podsumowanie
Ćwiczenie polegało na poznaniu procesu generowania rastrowych produktów pochodnych w postaci map spadków, ekspozycji oraz cieniowanej rzeźby z danych numerycznego modelu terenu oraz numerycznego modelu pokrycia terenu. Warstwy mają szerokie zastosowanie w analizach topograficznych oraz wielokryte-rialnych, jak również w procesach decyzyjnych.
Niniejsze ćwiczenie możliwe jest do wykonania w innych programach przeznaczonych do pracy z wysoko-ściowymi danymi rastrowymi.
Ryc. 8. Warstwa ekspozycji po zmianie stylu
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

4.6. Generowanie warstwic na podstawie danych LiDAR
71
4.6. Generowanie warstwic na podstawie danych LiDAR
Warstwice są jednym z podstawowych produktów lotniczego skanowania laserowego. Na podstawie sklasyfi-kowanej chmury punktów można je wygenerować automatycznie. Korzystając z narzędzi rozrzedzania liczby wierzchołków, wygładzania polilinii, a także manualnej poprawy plików wektorowych można osiągnąć bardzo dobre efekty generowania warstwic.
Szacowany czas wykonania ćwiczenia: 20 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\04_06_LP360
• 04_06_LP360.mxd – projekt mapy, zapisany w oprogramowaniu ArcMap;• M-34-101-A-c-4-3-2.las – sklasyfikowana chmura punktów LiDAR w formacie LAS 1.2 Data Point
Record Format 3;• bledy_warstwice.shp – plik wskazujący obszary z błędnie automatycznie wygenerowanymi war-
stwicami (format SHP);• ISOK_eksport_warstwice.xml – zdefiniowane zadanie generowania warstwic;• ISOK_rozrzedzanie_warstwice.xml – zdefiniowane zadanie rozrzedzania liczby wierzchołków.
Obszar: Tatry Wysokie, okolice szczytu Rysy
Oprogramowanie: LP360 (QCoherent), ArcMap (Esri)
ETAPY REALIZACJI ĆWICZENIA
4.6.1. Otwarcie dokumentu mapy i eksploracja danych
1. Uruchom przygotowany projekt 04_06_LP360.mxd, znajdujący się w folderze 04_06_LP360.
2. W oknie aplikacji ArcMap znajdują się:• dane ALS dla okolic szczytu Rysy w Tatrach Wysokich (M-34-101-A-c-4-3-2.las) z przypisanym atrybutem
klasy punktów, zawierające oprócz standardowych klas dostępnych w projekcie ISOK klasę 8 – Model Key Point, utworzoną w wyniku zastosowania zadania Model Key Point Filter, dostępnego w progra-mie LP360;
• pliki SHP z zaznaczonymi błędami wygenerowanych warstwic (bledy_warstwice.shp), zawierające w tabeli atrybutów opis błędów generowania warstwic.
4.6.2. Generowanie warstwic dla wczytanej chmury punktów
1. W celu przeprowadzenia generowania warstwic, kliknij w ikonę Export LiDAR Data, znajdującą się na pasku narzędziowym LP360 – wywoła ona otwarcie okna LP360 Export Wizard (ryc. 1).
2. W oknie LP360 Export Wizard wczytaj zdefiniowane wcześniej zadanie tworzenia warstwic ISOK_eksport_warstwice.xml, znajdujące się w folderze 04_06_LP360.
3. Zdefiniowane zadanie ISOK_eksport_warstwice.xml eksportuje warstwice jako pliki SHP 3D, nadając im cięcie warstwicowe co 50 m (ryc. 2; nr 1) i definiując rozmiar najkrótszej poziomicy o długości 100 m (ryc. 2; nr 2), z zastosowanym filtrem pozwalającym na przetwarzanie wyłącznie klasy 8 – Model Key Point (ryc. 2; nr 3).
Ryc. 1. Ikona eksportu danych LiDAR dostępna na pasku narzędziowym LP360

4. Produkty LiDAR i produkty pochodne
72
4. Następnie kliknij w przycisk Next celem przejścia do drugiego kroku, w którym pozostawisz opcje ekspor-tu w ustawieniu domyślnym (ryc. 3) i zaraz po tym przejdziesz do następnego kroku, korzystając z klawi-sza Next.
5. W ostatnim oknie LP360 Export Wizard zdefiniuj miejsce zapisu plików: wskaż folder roboczy (D:\Szkolenia_LiDAR\Cwiczenia\Robocze; ryc. 4; nr 1), nazwij plik warstwice oraz zaznacz opcję Insert Output (s) to Map (w celu automatycznego wczytania warstwic zaraz po eksporcie do widoku okna mapy; ryc. 4; nr 2).
6. W celu wykonania modelu warstwicowego przyciśnij przycisk Finish (ryc. 4; nr 3).
Ryc. 2. Parametry eksporu warstwic w oknie LP360 Export Wizard
3
1
2
Ryc. 3. Wybór obszaru ekporu warstwic w oknie LP360 Export Wizard

4.6. Generowanie warstwic na podstawie danych LiDAR
73
7. W wyniku wykonanego eksportu otrzymano model warstwicowy, który w wielu miejscach jest bardzo skomplikowany i poszarpany. Wymaga on rozrzedzenia liczby węzłów na całej długości każdej z warstwic.
4.6.3. Rozrzedzanie liczby węzłów wygenerowanych warstwic
1. W celu przeprowadzenia automatycznego rozrzedzenia liczby węzłów wczytaj plik ISOK_rozrzedzanie_warstwice.xml poprzez menu Table Of Contents >> Point Cloud Task >> Import Task(s)…
2. W zakładce Point Cloud Task wybierz ISOK_rozrzedzanie_warstwice i wykonaj zadanie, wykorzystując ikonę Execute Taks for a Project dostępną na pasku narzędziowym LP360 Point Cloud Task (ryc. 5).
3. Po wykonaniu zadania zbędne wierzchołki zostały usuniete, a model warstwicowy został uogólniony (ryc. 6)
Ryc. 4. Definiowanie miejsca zapisu modelu warstwicowego w oknie LP360 Export Wizard
1
2
3
Ryc. 5. Narzędzie Execute Taks for a Project do wykonywania zadań dla całego projektu
(ikona w czerwonej ramce)
Ryc. 6. Przykład linii warstwicowej przed wykonaniem zadania ISOK_rozrzedzanie_warstwice.xml (czerwona linia) i po wykonaniu zadania (zielona linia)

4. Produkty LiDAR i produkty pochodne
74
4.6.4. Zapisywanie wartości wysokości warstwic do tabeli atrybutów
1. Otwórz tabelę atrybutów warstwy warstwice.shp (przyciśnij prawy klawisz myszy na wybranej warstwie i wybierz polecenie Open Attribute Table) i kliknij prawym przyciskiem myszy na kolumnę Elev, a następ-nie wybierz funkcję Calculate Geometry… w celu zapisania wartości wysokości z geometrii obiektu.
2. W oknie Calculate Geometry dla opcji Property: wybierz Max Z of geometry i kliknij OK.
4.6.5. Poprawa błędów generowania linii warstwicowych
1. Podczas automatycznego wykonywania warstwic mogą wystapić różne błędy generowania (plik bledy_warstwice.shp). Do najcześciej wystepujących można zaliczyć błędy wynikające z:• braku połączenia pomiędzy warstwicami o tej samej wysokości (błędy łączenia);• nakładania się na siebie warstwic różnej wysokości (nakładanie warstwic);• występowania warstwic zbudowanych z jednej bardzo krótkiej krawędzi (krótka warstwica);• występowania w niewielkiej odległości warstwic o tej samej wysokości (inne).
2. Wykonaj poprawę wygenerowanego pliku z liniami warstwicowymi: skorzystaj z pliku bledy_warstwice.shp, wybierając obiekt poprzez dwukrotne kliknięcie na niego w tabeli atrybutów (id = 1; błędy łączenia).
3. Rozpocznij edycję pliku warstwice_rozrzedzone.shp, klikając prawym przyciskiem myszy na nazwę warstwy i używając polecenia Edit Features >> Start Editing.
4. Wykorzystując funkcję Edit Tool, dostępną na pasku narzędziowym, nasuń poszczególne węzły polilinii, które chcesz połączyć (ryc. 7).
5. Zaznacz obie polilinie i skorzystaj z funkcji znajdującej się na pasku narzędziowym Editor w menu Editor >> Merge…
6. W oknie Merge zaznacz dowolny obiekt do połączenia i kliknij OK.
7. Korzystając z powyższych kroków, popraw pozostałe błędy oznaczone atrybutem błędy łączenia i przejdź do następnego kroku.
8. W celu usunięcia nakładających się na siebie warstwic (nakładanie warstwic) o różnych wysokościach, przejdź do błędu oznaczonego id = 12 w pliku bledy_warstwice.shp.
Ryc. 7. Nasunięte na siebie węzły niepołączonych linii warstwicowych (id = 1)

4.6. Generowanie warstwic na podstawie danych LiDAR
75
9. Skorzystaj z narzędzia Edit Tool i trzymając klawisz D usuń zbędne wierzchołki (ryc. 8).
10. W celu usunięcia błędów oznaczonych jako krótka warstwica zaznacz narzędziem Edit Tool błędną warstwi-cę i przyciśnij klawisz Delete.
11. Dokonaj korekty występujących w niewielkiej odległości warstwic o tej samej wysokości (inne), usuń zbędne wierzchołki warstwicy stosując narzędzia omówione w kroku 9.
4.6.6. Wygładzanie warstwic
1. Wykorzystaj narzędzie Smooth Line dostępne w ArcToolbox >> Cartography Tools >> Generalization, dzięki któremu wygładzisz dotychczas opracowywane warstwice.
2. Ustaw parametry widoczne na ryc. 9 i wykonaj zadanie poprzez kliknięcie w przycisk OK.
3. W wyniku wykonania zadania otrzymałeś warstwice, które można wykorzystać w opracowaniach kartograficznych (ryc. 10).
Ryc. 8. Przebieg linii warstwicowych przed poprawą (po lewej) po poprawie (po prawej)
Ryc. 9. Parametry wygładzania warstwic w oknie Smooth Line

4. Produkty LiDAR i produkty pochodne
76
4.6.7. Wyświetlanie etykiet i zmiana stylu wyświetlania warstwic
1. W celu wyświetlenia etykiet dla warstwic, wejdź do właściwości warstwy warstwice_wygladzone.shp i w oknie Labels w obszarze Label Field wybierz z menu rozwijalnego atrybut Elev (ryc. 11; nr 1).
2. W obszarze Text Symbol wybierz rozmiar czcionki 10 oraz ustaw kolor czcionki jako cheery cola (ryc. 11; nr 2).
3. W celu ustawienia właściwego wyświetlania pozycji opisów, przejdź do opcji Placement Properities… i w obszarze Feature Weight z menu rozwijalnego wybierz parametr High.
4. Finalnie zaakceptuj wszystkie zmiany w oknach Placement Properties oraz Layer Properties przyci-skiem OK.
5. W celu wyświetlenia etykiet dla warstwic, kliknij prawym przyciskiem na nazwę warstwice_wygladzone.shp i zaznacz Label Features.
6. W obszarze widoku okna zostaną wyświetlone warstwice wraz z etykietami oznaczającymi wartości wyso-kości (ryc. 12).
Ryc. 10. Przykład linii warstwicowej przed wykonaniem zadania Smooth Line (czerwona linia) i po wykonaniu zadania (zielona linia)
Ryc. 11. Okno właściwości wyświetlania opisów warstwic
1
2

4.6. Generowanie warstwic na podstawie danych LiDAR
77
4.6.8. Podsumowanie
W ćwiczeniu zaprezentowano sposoby generowania warstwic na podstawie klasy 8 – Model Key Point z wy-korzystaniem danych lotniczego skanowania laserowego. Wygenerowane warstwice poddano rozrzedzeniu liczby węzłów oraz manualnej poprawie błędów generowania. W ostatnim etapie ćwiczenia wszystkie war-stwice wygładzono. Finalnym efektem przetwarzania warstwic było ustawienia stylów wizualizacji warstwic oraz ich opisów.
Ryc. 12. Fragment wykonanych warstwic wraz z etykietami
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
.........................................................................................................................................................................................................................

4. Produkty LiDAR i produkty pochodne
78
4.7. Generowanie modeli 3D budynków – poziom LOD 2
W niniejszym ćwiczeniu zostanie wygenerowany model 3D budynków na poziomie LOD 2. Korzystając z danych pochodzących z lotniczego skanowania laserowego uczestnik szkolenia wygeneruje model 3D dachów bu-dynków, zweryfikuje jego poprawność oraz dokona jego korekty. Finalnie, bazując na numerycznym modelu terenu, zostanie wygenerowany i zwizualizowany model 3D budynków w formacie SHP.
Szacowany czas wykonania ćwiczenia: 35 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\04_07_ENVI
• N-33-91-C-c-3-2-1-3.ini – projekt LiDAR, zapisany w formacie ENVI LiDAR;• N-33-91-C-c-3-2-1-3.las – chmura punktów ALS w formacie LAS 1.2 Data Point Record Format 3;• Klepino_NMT.tif – numeryczny model terenu w formacie TIFF, o rozdzielczości 0,5 m;• budynki_3D.sxd – projekt mapy wykonany w oprogramowaniu ArcScene.
Obszar: Klępino (powiat stargardzki, województwo zachodniopomorskie)
Oprogramowanie: ENVI LiDAR (Exelis VIS), ArcScene (Esri)
ETAPY REALIZACJI ĆWICZENIA
4.7.1. Uruchomienie oprogramowania ENVI LiDAR i wczytanie projektu
1. Wciśnij kombinację klawiszy Windows+Q (klawisz Windows znajduje się obok klawisza Ctrl). W pojawiają-cym się po prawej stronie ekranu oknie Wyszukaj wpisz ciąg znaków ‘ENVI’. Po kliknięciu w ikonę programu ENVI LiDAR, która pojawi się poniżej, nastąpi uruchomienie aplikacji. (W taki sposób możesz wyszukiwać pliki w systemie Windows 8 lub 8.1).
2. Z głównego menu ENVI LiDAR wybierz zakładkę File i polecenie Open. W oknie Otwieranie wskaż ścieżkę do folderu z danymi: D:\Szkolenia_LiDAR\Cwiczenia\04_07_ENVI\N-33-91-C-c-3-2-1-3. Wybierz plik N-33-91-C-c-3-2-1-3.ini i kliknij polecenie Otwórz, aby wybrać projekt.
4.7.2. Wybór parametrów generowania modelu 3D dachów budynków na poziomie LOD 2
1. W celu wygenerowania modelu 3D dachów budynków, w oprogramowaniu ENVI LiDAR ustaw odpowied-nie parametry, takie jak np. minimalna powierzchnia, tolerancja powierzchni płaskich czy metoda tworze-nia budynków. W tym celu z głównego paska Menu ENVI LiDAR wybierz zakładkę Process >> Process Data.
2. W oknie Project Properties w zakładce Outputs wskaż produkty, które zostaną wygenerowane (ryc. 1; nr 1). W sekcji Products File Names and Formats na liście wszystkich dostępnych produktów zaznacz jedynie Produce Buildings (ryc. 1; nr 2).
3. W polu Vector File Name wpisz nazwę dla wygenerowanych dachów budynków dachy_budynkow_3D.shp. Z rozwijalnej listy formatów produktów (ryc. 1; nr 3) wybierz SHP format (*.shp).
4. W sekcji Export Coordinate System upewnij się, że jest wybrany układ PL 1992/19 (ryc. 1; nr 4). Jeśli nie jest wybrany, to kliknij opcję Advanced Projection (zaawansowane odwzorowanie) i z rozwijalnej listy Projection wybierz Poland 1992/19 oraz zatwierdź wybór klawiszem OK.

4.7. Generowanie modeli 3D budynków – poziom LOD 2
79
5. Wszystkie produkty generowane w procesie przetwarzania zostaną zapisane domyślnie w folderze Products.
6. W oknie Project Properties w zakładce Area Definition zaznacz obszar, który zostanie poddany prze-twarzaniu – z niego zostaną wygenerowane produkty. Wybierz opcję Entire Area, aby przetworzyć dane z całego obszaru (ryc. 2).
Ryc. 1. Ustawienie parametrów generowania – wybór produktów
1
2 3
4
Ryc. 2. Ustawienie parametrów generowania – wybór obszaru

4. Produkty LiDAR i produkty pochodne
80
7. W oknie Project Properties w zakładce Production Parameters ustaw poszczególne parametry dla gene-rowanych dachów budynków – jak na ryc. 3.
4.7.3. Generowanie modelu 3D dachów budynków
1. Po wpisaniu odpowiednich wartości parametrów dachów budynków w oknie Project Properties, kliknij przycisk Start Processing. Rozpocznie się przetwarzanie chmury punktów i tym samym generowanie dachów budynków. Po zakończeniu zostaną wyświetlone przetworzone punkty oraz wektory dachów bu-dynków (ryc. 4).
2. Utworzone warstwy zostaną wyświetlone w trybie QA – Quality Assurance. Tryb QA umożliwia edycję danych oraz dodawanie obiektów w miejsca, w których nie zostały wygenerowane, a powinny się tam znajdować.
Ryc. 3. Ustawienie parametrów generowania wartości dla poszczególnych parametrów dachów budynków
Ryc. 4. Wygenerowane dachy budynków w postaci sklasyfikowanych punktów oraz wektorów

4.7. Generowanie modeli 3D budynków – poziom LOD 2
81
4.7.4. Weryfikacja poprawności wygenerowanego modelu 3D dachów budynków
1. Przeglądając warstwę punktów oraz wektorów i porównując te warstwy ze sobą, można zauważyć, że nie każdy obiekt w postaci punktów ma swój odpowiednik w warstwie wektorowej. Najczęstszymi błędami w procesie automatycznego wyszukiwania i generowania dachów budynków są m.in.:• błędna klasyfikacja dachów budynków,• brak ciągłości punktów reprezentujących dachy budynków, np. część dachu zasłonięta.
2. W celu poprawy wygenerowanego automatycznie modelu 3D dachów budynków skorzystaj z trybu QA i dokonaj manualnej edycji budynków zgodnie z poniższym opisem.
4.7.5. Dodanie nowego modelu 3D dachu budynku
1. Punkty, które nie zostały sklasyfikowane jako dach budynku można zaznaczyć i w ich miejscu dodać (wstawić) dach.
2. W celu dodania dachu budynku należy dwukrotnie kliknąć na grupę punktów reprezentującą dach, ale nieobrysowaną poligonem (ryc. 5). Po kliknięciu pojawi się lista opcji do wyboru, należy wybrać opcję New Correction, która umożliwi dodanie nowego dachu budynku.
3. W oknie Correction Item wybierz opcję:• Building–Set – wybrane punkty będą stanowiły podpowiedź dla ENVI LiDAR, że w danym miejscu
należy szukać powierzchni płaskich;• Building–Set as Boxed – oblicza obwód dachu budynku i ustawia dach jako powierzchnię płaską. Tej
opcji należy użyć, jeśli są dziury w danych lub gdy istnieje lokalne zmniejszenie gęstości punktów lasera;• Dodatkowo zaznaczenie opcji New Building umożliwi obrysowanie poligonem punktów reprezentują-
cych dach budynku (ryc. 6).
Ryc. 5. Grupa punktów, w miejscu której należy wstawić dach budynku

4. Produkty LiDAR i produkty pochodne
82
4.7.6. Edycja istniejącego modelu 3D dachu budynku
1. W przypadku, gdy obrysy dachów budynków zostały źle wygenerowane, np. nie obejmują całej powierzch-ni dachu budynku, poddaj je edycji i dostosuj zasięg poligonu do zakresu punktów, które reprezentują dany dach budynku.
2. Wybierz ponownie ten sam dach, który został dodany w poprzednim kroku (4.7.5).
3. W celu edycji konturów tego dachu budynku, kliknij dwukrotnie na kontur i z listy opcji, która się pojawi, wybierz Edit Building Contour. Po wybraniu tej opcji pojawi się okno profilu poprzecznego z zaznaczonym na czerwono wybranym poligonem (ryc. 7). Wierzchołki poligonu przesuń tak, aby objęły powierzchnię całego dachu budynku. Kliknij prawym przyciskiem myszy, aby zaakceptować edycję i wybierz polecenie Save Correction.
4. Jeśli uważasz, że kontur został źle narysowany, możesz go usunąć. W tym celu należy kliknąć dwukrotnie na kontur i z listy dostępnych opcji wybrać Delete Building Contour.
5. W celu zapisu edycji modelu 3D dachów budynków wyjdź z trybu QA poprzez odznaczenie QA Mode w menu Edit, a następnie wyeksportuj wektory do formatu SHP. Z menu głównego ENVI LiDAR wybierz File >> Export >> Buildings. Z rozwijalnej listy Format wybierz format SHP (ryc. 8). Następnie wybierz przycisk OK – dane zostaną wyeksportowane pod nadaną wcześniej nazwą dachy_budynkow_3D.shp.
Ryc. 6. Obrysowanie poligonem punktów dachu budynku
Ryc. 7. Edycja konturów budynku

4.7. Generowanie modeli 3D budynków – poziom LOD 2
83
4.7.7. Generowanie modelu 3D budynków w oprogramowaniu ArcScene
1. Otwórz projekt mapy budynki_3D.sxd, który znajduje się w folderze D:\Szkolenia_LiDAR\Cwiczenia\04_07_ENVI i dodaj do widoku wygenerowany wcześniej plik dachy_budynkow_3D.shp znajdujący się w folderze D:\Szkolenia_LiDAR\Cwiczenia\04_07_ENVI\N-33-91-C-c-3-2-1-3.las\Products.
2. W celu wykonania modelu 3D budynków, w pierwszym kroku należy wykonać model TIN dla dachów budynków. Z okna narzędziowego wybierz funkcję Create TIN, która dostępna jest w ArcToolbox >> 3D Analyst >> Data Management >> TIN. Zdefiniuj parametry dla wykonywanego zadania:• w polu Output TIN zdefiniuj nazwę pliku jako dachy_budynkow_TIN.adf oraz wybierz folder
D:\Szkolenia_LiDAR\Cwiczenia\04_07_ENVI\N-33-91-C-c-3-2-1-3\Products w którym zapiszesz utworzony model TIN (ryc. 9; nr 1);
• w oknie Input Feautre Class wybierz plik dachy_budynkow_3D.shp (ryc. 9; nr 2);• w kolumnie SF Type wybierz Hard_Clip (ryc. 9; nr 3) w celu zachowania geometrii dachów budynków
bez użycia efektu wygładzania krawędzi podczas procesu interpolacji;• uruchom zdefiniowane zadanie poprzez przycisk OK (ryc. 9; nr 4).
3. Następnym krokiem jest wygenerowanie modelu TIN dla numerycznego modelu terenu. Z ArcToolbox wybierz narzędzie Raster to TIN, które znajdziesz w 3D Analyst >> Conversion >> From Raster, a następnie zdefiniuj parametry dla wykonywanego zadania:• w oknie Input Raster wybierz plik Klepino_NMT.tif (ryc. 10; nr 1);• w oknie Output TIN wybierz folder D:\Szkolenia_LiDAR\Cwiczenia\04_07_ENVI\N-33-91-C-c-3-2-1-3\Products
w którym chcesz zapisać rezultat i nadaj plikowi nazwę NMT_TIN (ryc. 10; nr 2);• zatwierdź przyciskiem OK (ryc. 10; nr 3).
Ryc. 8. Eksport wektorów dachów budynków
2
1
3
4
Ryc. 9. Tworzenie modelu TIN dla dachów budynków

4. Produkty LiDAR i produkty pochodne
84
4. W ostatnim kroku utwórz model 3D budynków przy pomocy funkcji Extrude Between, która umożliwia generowanie obiektów 3D ograniczonych dwiema powierzchniami TIN. W tym celu wybierz 3D Analyst >> Triangulated Surface >> Extrude Between. Zdefiniuj parametry dla wykonywanego zadania:• w dwóch pierwszych polach okna o nazwie Input TIN wczytaj odpowiednio pliki dachy_budynkow_TIN
oraz NMT_TIN (ryc. 11; nr 1 nr 2);• w polu Input Feauture Class wprowadź plik dachy_budynkow_3D.shp (ryc. 11; nr 3);• w polu Output Feature Class wybierz folder w którym chcesz zapisać rezultaty i nadaj plikowi nazwę
budynki_3D.shp (ryc. 11; nr 4);• zatwierdź przyciskiem OK (ryc. 11; nr 5).
Ryc. 10. Tworzenie obiektów TIN dla numerycznego modelu terenu
1
2
3
Ryc. 11. Narzędzie Extruded Between
1
2
3
4
5

4.7. Generowanie modeli 3D budynków – poziom LOD 2
85
W wyniku wcześniej wykonanych operacji powinieneś otrzymać wynik zbliżony do przedstawionego na rycinie poniżej (ryc. 12).
4.7.8. Podsumowanie
W ćwiczeniu zaprezentowano sposób generowania modelu 3D budynków na poziomie LOD2 z wykorzysta-niem danych lotniczego skanowania laserowego. W pierwszym etapie ćwiczenia wygenerowano model 3D dachów budynków, dokonano jego korekty i eksportu do pliku SHP. Następnie, na podstawie numerycznego modelu terenu oraz modelu 3D dachów budynków, wygenerowano model 3D budynków w formacie SHP będący produktem końcowym ćwiczenia.
Generowanie modeli 3D budynków jest również możliwe w innych programach.
Ryc. 12. Wynik końcowy kreowania modelu 3D budynków
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

8686
5. Produkty LiDAR w projekcie ISOK
5.1. Przeglądanie usług dostępnych w Geoportal.gov.pl z wykorzystaniem aplikacji GIS
Ćwiczenie ma na celu zapoznanie uczestnika szkoleń z obsługą aplikacji mapowej Geoportal.gov.pl, ze szcze-gólnym uwzględnieniem wykorzystania serwisów sieciowych, związanych z projektem ISOK oraz z obsługą programu GIS w zakresie wczytywania i analizy usług WMS. Po zakończeniu ćwiczenia, uczestnik zdobędzie praktyczną umiejętność wyszukiwania i analizowania informacji przestrzennej.
Szacowany czas wykonania ćwiczenia: 40 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\05_01_QGIS
• Warstwa WMS ISOK–zasięg produktów projektu (usługa WMS):http://mapy.geoportal.gov.pl/wss/service/pub/guest/G2_ISOK_WMS/MapServer/WMSServer
• Warstwa WMTS ISOK–Cieniowanie (usługa WMTS):http://mapy.geoportal.gov.pl/wss/service/WMTS/guest/wmts/ISOK_CIEN
• Warstwa WMTS ISOK–Hipsometria (usługa WMS):http://mapy.geoportal.gov.pl/wss/service/wmsimg/guest/ISOK_HipsoDyn/ImageServer/WMSServer
• Warstwa WMS Ortofotomapa (usługa WMS):http://mapy.geoportal.gov.pl/wss/service/img/guest/ORTO/MapServer/WMSServer
• Plik projektu oprogramowania QGIS:05_01_QGIS.qgs
Obszar: Zasięg warstw WMS ISOK
Oprogramowanie: Aplikacja mapowa Geoportal, QGIS (OSGeo)
ETAPY REALIZACJI ĆWICZENIA
5.1.1. Struktura aplikacji mapowej Geoportal.gov.pl
Usługa udostępniania danych przestrzennych poprzez centralny portal pod nazwą Geoportal.gov.pl zawiera cztery podstawowe „punkty dostępowe” (ryc. 1):
• Geoportal krajowy – zgodny z Ustawą o Infrastrukturze Informacji Przestrzennej,• Portal Branżowy – udostępniający usługi Służbie Geodezyjnej i Kartograficznej,• Geoportal INSPIRE – regulowany Dyrektywą INSPIRE (UE),• Moduł Statystyk – narzędzie umożliwiające kartograficzną prezentację danych statystycznych
5.1. Przeglądanie usług dostępnych w Geoportal.gov.pl z wykorzystaniem aplikacji GIS
87
5.1.2. Uruchomienie aplikacji mapowej Geoportal.gov.pl
W pierwszym kroku ćwiczenia uruchom przeglądarkę internetową (np. Firefox) oraz wpisz adres strony inter-netowej mapy.geoportal.gov.pl. Po kompletnym załadowaniu portalu, na ekranie pojawi się widok główny modułu mapowego (ryc. 2).
5.1.3. Zaprezentowanie narzędzi dostępnych w aplikacji Geoportal.gov.pl
W aplikacji mapowej Geoportal.gov.pl podstawowe narzędzia dostępne są poprzez pasek menu dostępny w lewym górnym rogu aplikacji (ryc. 3).
Narzędzia można zaprezentować według kategorii funkcjonalności (tab. 1).
Ryc. 1. Punkty dostępowe aplikacji Geoportal.gov.pl
Ryc. 2. Okno główne aplikacji Geoportal.gov.pl
Ryc. 3. Narzędzia podstawowe aplikacji mapowej

5. Produkty LiDAR w projekcie ISOK
88
Kategoria Narzędzie Opis
Plik
Link do kompozycji mapowejTworzy link z wybranego fragmentu mapy w celu udostęp-niania innym użytkownikom
Mapy użytkownikaUmożliwia utworzenie mapy z wybranego obszaru oraz przechowywanie go w bazie danych lub pamięci podręcz-nej
ZalogujOtwiera panel logowania dla zarejestrowanych użytkow-ników
Zgłoś błądPozwala zgłosić błąd danych poprzez wypełnienie pól w oknie podręcznym
Widok
Zawartość mapyWyświetla okno podręczne zawartości mapy z zakładkami ‘Serwisy’ oraz ‘Legenda’
Dodaj mapę Umożliwia dodawanie serwisów WMS oraz WMTS
Centrowanie mapyCentruje mapę poprzez ustawienie współrzędnych środka mapy
Ustawienia układu współrzędnychUmożliwia odczytanie i zmianę układu współrzędnych mapy oraz kursora myszy
Ustawienia widocznościDostosowuje okna widoczne po wybraniu poszczególnych widoków
Widoczność warstw i serwisów Dostosowuje przedziały widoczności dla warstw
Osadzanie mapy Generuje kod pozwalający osadzić mapę na stronie www
Pomiary
Mierz powierzchnięDokonuje pomiaru odległości odcinkami prostych (wraz z całkowitą długością krzywej)
Mierz odległośćNarzędzie pomiaru powierzchni (mierzy także poszczegól-ne boki poligonu)
Wyczyść pomiary Usuwa pomiary z obszaru mapy
Wyszukiwania
Szukaj Wyszukuje obiekty geograficzne
Wyszukiwanie działek Wyszukuje działki
Wyszukiwanie metadanych Wyszukuje metadane
5.1.4. Przegląd pasków narzędziowych, dostępnych w Geoportal.gov.pl
1. Elementy interfejsu podstawowego, które są dostępne podczas pracy z aplikacją mapową Geoportal.gov.pl zostały opisane poniżej (ryc. 4).
Tabela 1. Narzędzia podstawowe
przycisk przenoszący użytkownika do strony głównej Geoportal.gov.pl, zawierającej m.in.: regulamin usługi, pliki pomocy oraz komunikaty dotyczące np. planowanych przerw w do-stępie do usług
przycisk ustawień widoczności
przycisk wyboru interfejsu prostego
przycisk wyboru interfejsu rozszerzonego
przycisk wyboru interfejsu pełnego
Ryc. 4. Elementy interfejsu podstawowego

5.1. Przeglądanie usług dostępnych w Geoportal.gov.pl z wykorzystaniem aplikacji GIS
89
2. Po wskazaniu kursorem myszki w górnym zakresie poniższego okna, wyświetlane są wszystkie predefinio-wane kompozycje: KATASTER, ORTO, RASTER oraz TOPO (ryc. 5).
Do wyszukiwania obiektów geograficznych służy okno Szukaj (ryc. 6).
Pasek narzędzi nawigacyjnych zawiera następujące funkcje (ryc. 7).
5.1.5. Usługi WMS ISOK dostępne w aplikacji mapowej Geoportal
Usługi, które można wykorzystać podczas pracy z aplikacją mapową Geoportal.gov.pl w kontekście projektu ISOK, to m.in.:
• Warstwa WMS ISOK – Zasięg produktów projektu dostępna jako usługa WMS):http://mapy.geoportal.gov.pl/wss/service/pub/guest/G2_ISOK_WMS/MapServer/WMSServer
• Warstwa WMS ISOK–Cieniowanie (dostępna jako usługa WMS):http://mapy.geoportal.gov.pl/wss/service/wmsimg/guest/ISOK_HipsoDyn/ImageServer/WMSServer
• Warstwa WMTS ISOK – Hipsometria (dostępna jako usługa WMTS):http://mapy.geoportal.gov.pl/wss/service/WMTS/guest/wmts/ISOK_HIPSO
• Warstwa WMTS ISOK – Cieniowanie (dostępna jako usługa WMTS):http://mapy.geoportal.gov.pl/wss/service/WMTS/guest/wmts/ISOK_CIEN
• Warstwa WMTS ISOK – Cieniowanie i Hipsometria (dostępna jako usługa WMTS):http://mapy.geoportal.gov.pl/wss/service/WMTS/guest/wmts/ISOK_CIENHIPSO
Ryc. 5. Kompozycja mapowa
Ryc. 6. Okno wyszukiwania obiektów
przesunięcie mapy
powiększenie mapy
pomniejszenie mapy
pełny widok
poprzedni widok
następny widok
identyfikacja obiektu
Ryc. 7. Elementy interfejsu podstawowego aplikacji mapowej Geoportal.gov.pl

5. Produkty LiDAR w projekcie ISOK
90
5.1.6. Uruchamianie usługi WMS ISOK w Geoportal.gov.pl
1. Dane przestrzenne dotyczące projektu ISOK dystrybuowane są poprzez usługi sieciowe WMS (Web Map Service) oraz WMTS (Web Map Tile Service). Obydwie usługi, oparte są o standardy techniczne przygotowane przez OGC (Open Geospatial Consortium), udostępniając dane w postaci rastrowej. Usługa WMTS serwuje dane w postaci predefiniowanych fragmentów mapy (tzw. kafelków; Tile).
2. W celu dodania warstwy usługi WMS pod nazwą ISOK – zasięg produktów, w oknie głównym Geoportal.gov.pl zaznacz przycisk wyboru interfejsu rozszerzonego (ryc. 4). W pasku narzędziowym, który się pojawi, wybierz Dodaj mapę lub z lewej strony ekranu w rozwijanym menu zaznacz tą samą opcję w zakładce Widok (ryc. 8).
3. W pojawiającym się oknie wyboru mapy wybierz z zakładki Serwisy predefiniowane opcję WMS, a na-stępnie rozwiń listę Geoportal. Z listy serwisów wybierz serwis: Zasięg produktów ISOK – stan na dzień… Zaznaczony serwis obramowany będzie kolorem niebieskim (ryc. 9).
4. Po wskazaniu serwisu kliknij na przycisk Połącz. W dole okna pojawi się komunikat Pobieram właściwości. Może on wyświetlać się nawet przez kilkanaście sekund (czas pobierania zależy od szybkości łącza); w przy-padku, gdy komunikat nie znika przez dłuższy czas, ponownie wybierz polecenie Połącz. Dzięki interopera-cyjności, systemy nawiązują ze sobą połączenie i dokonują wymiany informacji.
Ryc. 8. Możliwości dodawania warstwy WMS
Ryc. 9. Okno Dodaj Mapę zawierające listy usług w poszczególnych kategoriach

5.1. Przeglądanie usług dostępnych w Geoportal.gov.pl z wykorzystaniem aplikacji GIS
91
5. Po połączeniu zakończonym sukcesem, wyświetlona zostaje zakładka Właściwości serwisu (ryc. 10). Usługi WMS posiadają często więcej niż jedną dostępną warstwę. W oknie właściwości wyszczególnione są wszyst-kie warstwy składające się na usługę WMS.
6. Po zaznaczeniu danej warstwy użytkownik ma do dyspozycji różne opcje modyfikacji sposobu wyświetla-nia wielowarstwowych serwisów WMS (ryc. 11).
7. W oknie właściwości warstwy można modyfikować także przeźroczystość oraz odwzorowanie, w którym wczytana zostanie dana usługa. Na potrzeby niniejszego ćwiczenia należy pozostawić wartości domyślne.
8. Wybierz polecenie Dodaj, aby zakończyć procedurę wczytywania usługi WMS. Usługa zostaje dodana do okna z listą dostępnych warstw (Zawartość mapy) i użytkownik może ją włączyć (np. LiDAR – bloki w PZGiK). W lewym dolnym rogu okna głównego aplikacji mapowej Geoportal.gov.pl, podczas wczytywania usługi WMS pojawia się okno informujące użytkownika o statusie wczytywania (pozytywnym lub negatywnym) oraz o czasie, w jakim usługa została załadowana (ryc. 12).
Ryc. 10. Okno właściwości serwisu WMS
Przesuń w górę
Przesuń w dół
Zaznacz wszystkie warstwy
Odznacz wszystkie warstwy
Przesuń na górę
Przesuń na dół
Edycja sposobu wyświetlania. Po wybraniu dostępne są opcje:
Ryc. 11. Opcje modyfikacji sposobu wyświetlania wielowarstwowych serwisów WMS

5. Produkty LiDAR w projekcie ISOK
92
9. Wczytywanie warstwy WMS następuje przy każdorazowym przesunięciu mapy lub zmianie jej skali przez użytkownika. W przypadku, gdy warstwa WMS nie została wczytana poprawnie, w oknie pojawi się czerwo-ny symbol. Po wczytaniu usługi WMS, na ekranie pojawi się warstwa Bloków LiDAR (ryc. 13).
10. Użytkownik za każdym razem ma możliwość zapisania kompozycji mapowych, jakie przygotowuje, po-przez uruchomienie opcji z menu Plik/Mapy użytkownika (ryc. 14). W odpowiednich oknach można nadać nazwę tworzonej mapie oraz zastosować odpowiedni komentarz. Mapa zapisywana może być w pamięci podręcznej lub w bazie danych.
Ryc. 12. Okno zawartości mapy (z lewej) oraz status załadowania warstw do okna mapy (z prawej)
Ryc. 13. Wczytana do aplikacji warstwa WMS z zasięgami Bloków LiDAR
Ryc. 14. Okno Mapy użytkownika

5.1. Przeglądanie usług dostępnych w Geoportal.gov.pl z wykorzystaniem aplikacji GIS
93
5.1.7. Procedura wczytania warstw poprzez usługę WMTS ISOK Cieniowanie
1. W oknie głównym Geoportal.gov.pl zaznacz przycisk wyboru pełnego interfejsu (ryc. 4). W pasku narzę-dziowym, który się pojawi, wybierz opcję Dodaj mapę. W oknie wyboru mapy, z zakładki Serwisy prede-finiowane wybierz opcję WMTS, a następnie rozwiń listę Usługi Krajowe WMTS. Z listy serwisów zaznacz teraz serwis ISOK Cieniowanie (zostanie obramowany na niebiesko). ISOK Cieniowanie to warstwa rastrowa przygotowana na podstawie danych ALS, przedstawiająca cieniowaną rzeźbę terenu (Hillshade) w rozdziel-czościach uzależnionych od skali mapy.
2. Po wybraniu serwisu wybierz Połącz. W dole okna pojawi się komunikat Pobieram właściwości. W zależno-ści od szybkości łącza internetowego, komunikat ten może pojawiać się przez kilkanaście sekund. W przy-padku gdy komunikat nie znika, należy ponownie spróbować użyć przycisk Połącz.
3. Po połączeniu zakończonym sukcesem, wyświetlone zostaje zakładka Właściwości serwisu. Na potrzeby niniejszego ćwiczenia pozostaw ustawienia domyślne. W celu zakończenia procedury wczytywania usługi WMTS, wybierz przycisk Dodaj. Warstwa ISOK Cieniowanie zostanie dodana do zawartości mapy (serwisy i legenda) oraz wyświetlona na ekranie (ryc. 15).
5.1.8. Przegląd atrybutów dostępnych przez usługę WMS ISOK
1. Atrybuty warstwy wyświetlanej w Geoportal.gov.pl można odczytać wykorzystując narzędzie Identyfika-cja (ryc.7), dostępne po lewej stronie okna głównego aplikacji. Strukturę usługi WMS Zasięg produktów ISOK, złożoną z warstw informacyjnych, przedstawiono poniżej (ryc. 16).
Ryc. 15. Wczytana warstwa ISOK Cieniowanie
Ryc. 16. Warstwy serwowane w usłudze Zasięg produktów projektu ISOK

5. Produkty LiDAR w projekcie ISOK
94
2. Każda z analizowanych warstw posiada swoje atrybuty (tab. 2), które można odczytać podczas pracy z apli-kacją mapową.
5.1.9. Procedura odczytu atrybutów z warstwy zasięg produktów ISOK
1. W oknie głównym aplikacji mapowej Geoportal.gov.pl upewnij się, że w obszarze Zawartość mapy (za-kładka Legenda) wczytana jest warstwa Zasięg produktów projektu ISOK (ryc. 17).
Tabela 2. Atrybuty usługi WMS Zasięg produktów ISOK
Warstwa Atrybut Przykładowa wartość atrybutu
Ortofotomapa – bloki
OBJECTID_1 102
NUMER_BLOKU 5020
DATA_DOST_W_PZGIK Dane dostępne w PZGiK
Ortofotomapa w PZGiKOBJECTID_1 102
NUMER_BLOKU 5020
LiDAR – bloki
GESTOSC 4 p/m2
OBJECTID_1 117
NUMER_BLOKU 5046
DATA_NALOTU 2012-04-11
DATA_DOST_W_PZGIK Dane dostępne w PZGiK
LiDAR – bloki w PZGiK
OBJECTID 625
OBJECTID_1 407
NUMER_BLOKU 4045
LiDAR Standard I – planowany zasięg opracowania
OBJECTID 1
SHAPE Polygon
SHAPE.AREA 277480424326,08698
SHAPE.LEN 11338242,009519
ID 0
LiDAR Standard II – planowany zasięg opracowania
OBJECTID 1
SHAPE 0
SHAPE.AREA 14297394213,9662
SHAPE.LEN 4626036,336112
Ryc. 17. Zbliżenie do wczytanej warstwy WMS

5.1. Przeglądanie usług dostępnych w Geoportal.gov.pl z wykorzystaniem aplikacji GIS
95
2. Z paska narzędzi nawigacyjnych wybierz ikonę Identyfikacja (ryc. 7),a następnie przybliż się do wybrane-go fragmentu mapy. Po kliknięciu na obszar pojawi się okno z dostępnymi atrybutami dla danej warstwy (ryc. 18).
3. Liczba poszczególnych pozycji w oknie oznacza liczbę warstw, które zostały wyselekcjonowane przy iden-tyfikacji. Po kliknięciu w ostatnią warstwę użytkownik może odczytać gęstość skanowania, numer Bloku LiDAR, datę rozpoczęcia wykonania nalotu oraz status dostępności w państwowym zasobie geodezyjnym i kartograficznym (ryc. 18).
4. W celu powrotu do poprzedniego okna (np. dla wybrania innej warstwy) wybierz przycisk ze strzałką w górnym menu okna skierowaną w lewo.
5.1.10. Uruchomienie programu QGIS i wczytanie projektu
1. Uruchom program QGIS w systemie Windows 8.1. W tym celu wciśnij kombinację klawiszy Windows+Q (klawisz Windows znajduje się obok klawisza Ctrl). W pojawiającym się po prawej stronie ekranu oknie Wyszukaj wpisz słowo ‘QGIS’. Po wybraniu ikony programu QGIS Desktop 2.4.0 nastąpi uruchomienie pro-gramu. Następnie może pojawić się okno Porady QGIS!, które można zamknąć naciskając przycisk OK.
2. Po uruchomieniu programu QGIS, z menu głównego Projekt wybierz opcję Otwórz. W pojawiającym się oknie zaznacz plik 05_01_QGIS, a następnie naciśnij klawisz Otwórz.
5.1.11. Dodawanie warstwy WMS
1. Po uruchomieniu oprogramowania QGIS wskaż na ikonę Dodaj warstwę WMS/WMTS (ryc. 19). W pojawia-jącym się oknie dodawania serwisów WMS, w menu Warstwy wybierz Nowa.
Ryc. 18. Identyfikacja przykładowych Bloków LiDAR poprzez usługę WMS – Zasięg produktów projektu ISOK
Ryc. 19. Ikona dodawania warstwy WM(T)S

5. Produkty LiDAR w projekcie ISOK
96
2. W kolejnym kroku w okienku Utwórz nowe połączenie WMS w polu URL wpisz (lub wcześniej skopiuj i wklej) adres WMS usługi Zasięg produktów ISOK. W polu Nazwa wpisz WMS Zasięg ISOK (ryc. 20).
3. Zatwierdź klawiszem OK, serwis WMS zostanie dodany do listy warstw kompozycji mapowej. Wybierz przy-cisk Połącz, aby inicjalizować połączenie (ryc. 21).
4. Po krótkim czasie połączenie powinno zostać nawiązane, co zostanie zasygnalizowane wyświetleniem listy warstw dostępnych w serwisie (ryc. 22).
5. W programie QGIS zostaną wczytane wszystkie warstwy z serwisu (co nastąpi przy zaznaczeniu pozycji o ID równym 0) jako jeden obraz rastrowy, bez możliwości wyboru poszczególnych warstw. Oznacza to w praktyce, iż warstwy o numerach ID = 1 oraz 3 zasłonią pozostałe, leżące poniżej.
Celem uniknięcia takiej sytuacji, poszczególne warstwy wczytuj do programu oddzielnie lub dokonaj wyboru warstw, które mają zostać wczytane (zaznaczając poszczególne warstwy w odpowiedniej kolej-ności). W tym celu wczytaj pojedynczo warstwy o numerach ID = 5, 7 oraz 11. W celu wczytania pierwszej
Ryc. 20. Okno dodawania połączenia do usługi WMS
Ryc. 21. Połączenie z usługą WMS w programie QGIS
Ryc. 22. Lista dostępnych warstw poprzez usługę WMS

5.1. Przeglądanie usług dostępnych w Geoportal.gov.pl z wykorzystaniem aplikacji GIS
97
z nich, zaznacz warstwę o ID = 5 a następnie zatwierdź przyciskiem Dodaj (ryc. 23). Procedurę powyższą należy powtórzyć dla pozostałych warstw.
6. Gdy wszystkie warstwy zostaną dodane pojedynczo, wybierz opcję Zamknij w oknie Dodaj warstwy z ser-wera WM(T)S. Po poprawnym wczytaniu wszystkich warstw upewnij się, czy ich kolejność jest taka jak przedstawiona poniżej (ryc. 24). W przypadku, gdy kolejność warstw jest inna, ich układ docelowy zmień poprzez zaznaczenie danej warstwy, a następnie przeciągnięcie jej na właściwą pozycję (w górę lub w dół).
5.1.12. Atrybuty warstw WMS
1. Usługi WMS umożliwiają odczyt atrybutów danej warstwy poprzez wysłanie do serwera zapytania GetFeatureInfo. Zapytanie to realizowane jest w programie QGIS poprzez zaznaczenie obiektu, którego atrybuty mają być pozyskane z serwisu WMS. Przy pomocy zapytania GetFeatureInfo możliwe jest tworzenie zapytań w języku SQL do tabeli atrybutów jak również tworzenie zapytań przestrzennych.
2. W menu głównym programu QGIS wybierz opcję Widok a następnie narzędzie Pokaż zakładki. Zakładka to definiowany przez użytkownika zasięg warstwy, który widoczny jest w oknie mapy podczas tworzenia zakładki. W kolejnym kroku z okna Zakładki wybierz zakładkę o nazwie Przybliżenie, klikając na nią dwu-krotnie. Po automatycznym ustawieniu okna w zdefiniowanej pozycji, zamknij okno wybierając Zamknij. W oknie Warstwy zaznacz poprzez podświetlenie warstwę LiDAR – bloki (ryc. 25).
Ryc. 23. Dodawanie pojedynczo warstwy z usługi WMS do programu QGIS
Ryc. 24. Układ dodanych warstw WMS
Ryc. 25. Zaznaczenie warstw

5. Produkty LiDAR w projekcie ISOK
98
3. Przy pomocy narzędzia Informacje o obiekcie (ryc. 26), znajdującego się w pasku głównym okna progra-mu, wybierz obiekt na mapie.
4. W oknie Wynik identyfikacji istnieje możliwość wyświetlenia atrybutów zaznaczonego obiektu poprzez rozwinięcie atrybutów warstwy symbolem „+”, znajdującego się po lewej stronie od cyfry 3 (ryc. 27).
5. Po zaznaczeniu opcji Nowe wyniki będą domyślnie rozwijane. w dole okna identyfikacji, każde następne wyszukiwanie atrybutów nie będzie wymagało rozwijania drzewa atrybutów.
5.1.13. Modyfikacja wyświetlania warstwy WMS
1. Program QGIS pozwala na modyfikację stylu wyświetlania warstwy (o ile styl alternatywny jest przewidzia-ny przez twórcę WMS) oraz jej transparencji. W oknie Warstwy wygaś wszystkie warstwy związane z serwi-sem WMS Zasięg produktów ISOK a następnie wyświetl warstwy ISOK HipsoDyn (lub Dynamiczna hipsome-tria) oraz Raster (ryc. 28).
2. W kolejnym kroku kliknij dwukrotnie na warstwę ISOK HipsoDyn (lub Dynamiczna hipsometria). W pojawia-jącym się oknie właściwości warstwy przejdź do zakładki Przeźroczystość. Przy pomocy suwaka, ustaw parametr Ogólna przeźroczystość na wartość 45% i wybierz OK. Warstwa WMS z mapą hipsometryczną staje się transparentna (ryc. 29).
Ryc. 26. Lokalizacja narzędzia Informacje o obiekcie
Ryc. 27. Wyświetlanie dostępnych atrybutów warstwy WMS
Ryc. 28. Warstwy ze zmodyfiko-waną symboliką

5.1. Przeglądanie usług dostępnych w Geoportal.gov.pl z wykorzystaniem aplikacji GIS
99
3. Po zakończeniu prac projekt zapisz przy użyciu ikony Zapisz, znajdującej się na pasku narzędziowym.
5.1.14. Podsumowanie
Powyższe ćwiczenie miało na celu pokazanie możliwości obsługi serwisów WMS związanych z projektem ISOK w aplikacji mapowej Geoportal.gov.pl oraz oprogramowaniu GIS (na przykładzie QGIS).
Ryc. 29. Kompozycja z transparentnymi warstwami WMS
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

5. Produkty LiDAR w projekcie ISOK
100
5.2. Przygotowanie kompozycji mapowej na podstawie produktów LiDAR i ortofotomapy
Ćwiczenie ma na celu zdobycie umiejętności w zakresie przygotowania mapy na podstawie produktów po-chodnych z lotniczego skanowania laserowego. W ramach ćwiczenia uczestnicy utworzą własną mapę, zawie-rającą wszelkie elementy mapy (skala, legenda itd.). Korzystając z dostępnych narzędzi wczytają projekt mapy, w którym zapisane są produkty pochodne oraz dane z Georeferencyjnej Bazy Danych Obiektów Topograficz-nych (GBDOT) oraz dostosują ich symbolizacje, tak aby jak najlepiej odzwierciedlały rzeczywistość.
Szacowany czas wykonania ćwiczenia: 40 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\05_02_ArcGIS• 05_02_ArcGIS.mxd – projekt mapy w formacie ArcMap;• Klepino_NMT.flt – numeryczny model terenu w formacie FLT, o rozdzielczości 0,5 m;• Klepino_NMPT.flt – numeryczny model pokrycia terenu w formacie FLT, o rozdzielczości 0,5 m;• N-33-91-C-c-3-1.tif – ortofotomapa w formacie TIFF, o rozdzielczości 10 cm;• N-33-91-C-c-3-2.tif – ortofotomapa w formacie TIFF, o rozdzielczości 10 cm;• poziomice.shp – poziomice o cięciu 1,0 m (format SHP);• BDOT10k:
− Miejscowosc_Klepino.shp – miejscowość Klępino; − Budynki.shp – budynki; − Rzeki_stumienie.shp – rzeki i strumienie; − Jezdnie.shp – jezdnie; − Drogi.shp – drogi; − Wody_powierzch.shp – woda powierzchniowa; − Lasy.shp – teren leśny i zadrzewiony; − Trawy_uprawy.shp – roślinność trawiasta i uprawa rolna.
Obszar: Klępino (powiat stargardzki, województwo zachodniopomorskie)
Oprogramowanie: ArcMap (Esri)
ETAPY REALIZACJI ĆWICZENIA
5.2.1. Uruchomienie oprogramowania ArcMap 10.2.1 i wczytanie projektu
1. Wciśnij kombinację klawiszy Windows+Q (klawisz Windows znajduje się obok klawisza Ctrl). W pojawiają-cym się po prawej stronie ekranu oknie Wyszukaj wpisz ciąg znaków ‘ArcMap’. Po kliknięciu w ikonę progra-mu ArcMap, która pojawi się poniżej, nastąpi uruchomienie aplikacji. (W taki sposób możesz wyszukiwać pliki w systemie Windows 8 lub 8.1)
2. W oknie powitalnym wskaż Existing Maps >> Browse for more. Otwórz folder 05_02_ArcGIS i wybierz plik 05_02_ArcGIS.mxd (ryc.1).

5.2. Przygotowanie kompozycji mapowej na podstawie produktów LiDAR i ortofotomapy
101
3. Wszystkie warstwy, zapisane w projekcie, zostaną wczytane i wyświetlone w Table of Contents: ortofo-tomapy (N-33-91-C-c-3-1.tif oraz N-33-91-C-c-3-2.tif), Klepino_NMT, Klepino_NMPT, Miejscowosc_Klepino, Budynki, Drogi, Jezdnie, Rzeki_strumienie, Wody_powierzch, Trawy_uprawy, Lasy, poziomice.
5.2.2. Ustawienie odpowiednich stylów symbolizacji danych
1. Domyślnie, aplikacja ArcMap przypisuje jednakowy symbol wszystkim obiektom zawartym w warstwie. Jednakże symbolizacja danych jest edytowalna, więc każdej z warstw można przypisać inne symbole, które będą ją reprezentowały i odróżniały od innej warstwy. Aby zmienić symbolizację wybranej warstwy, kliknij na nią prawym klawiszem myszy (ryc.2; nr 1), a następnie z listy poleceń wybierz Layer Properties (ryc. 2; nr 2). Poniższy przykład pokazuje zmianę symbolizacji warstwy Budynki.
Ryc. 1. Uruchomienie ArcMap i otworzenie projektu
1
2
Ryc. 2. Otworzenie właściwości warstwy

5. Produkty LiDAR w projekcie ISOK
102
2. W oknie Layer Properties wybierz zakładkę Symbology (ryc. 3; nr 3), a następnie kliknij w symbol (ryc. 3; nr 4). W oknie Symbol Selector (ryc. 3; nr 5) wybierz odpowiedni kolor dla wybranej warstwy. Aby zaakceptować wybór, kliknij OK w oknie wyboru symbolizacji oraz Apply w oknie Layer Properties. W ten sam sposób zmień symbolizację pozostałych warstw: Drogi, Jezdnie, Lasy, Trawy_uprawy, Wody_powierzch, Rzeki_strumienie.
3. Następnym etapem będzie dostosowanie symbolizacji warstw rastrowych – NMT oraz ortofotomap. Na numerycznym modelu terenu można wykorzystać efekt cieniowanej rzeźby terenu, a następnie ustawić odpowiednią skalę przezroczystości ortofotomap. W pierwszej kolejności wyłącz widoczność wszystkich warstw w tabeli zawartości, tak aby jedynie warstwa Klepino_NMT pozostała widoczna.
4. Na liście warstw zaznacz warstwę Klepino_NMT.flt, kliknij prawym klawiszem myszki i otwórz właściwości warstwy. W oknie Layer Properties otwórz zakładkę Symbology, zaznacz opcję Use hillshade effect i kliknij Zastosuj (ryc. 4). Efekt ten uwydatnia ukształtowanie terenu, przez co mamy wrażenie trójwymiarowości.
Ryc. 3. Zmiana symbolizacji warstwy
3
4
5
Ryc. 4. Stosowanie efektu cieniowanej rzeźby terenu na NMT

5.2. Przygotowanie kompozycji mapowej na podstawie produktów LiDAR i ortofotomapy
103
5. Na liście warstw włącz widoczność ortofotomap. Dostosujesz ich widoczność oraz zasięg.Zaznacz ortofotomapę N-33-91-C-c-3-1.tif, kliknij prawym przyciskiem myszy i otwórz właściwości warstwy. W oknie Layer Properties otwórz zakładkę Extent. W polu ustawienia zasięgu geograficznego warstwy – Set the Extent to, z rozwijalnej listy wybierz zasięg warstwy NMT: the rectangular extent of Klepino_NMT.flt i za-twierdź wybór, klikając OK (ryc. 5).
6. Następnie przejdź do zakładki Display i ustaw przezroczystość (Transparency) na 60% (ryc. 6).
7. W ten sam sposób zmień zasięg i przezroczystość drugiej ortofotomapy N-33-91-C-c-3-2.tif. Ustawiając 60% przezroczystości ortofotomapy, możemy zobaczyć pod rastrem cieniowaną rzeźbę terenu, a więc jeszcze lepiej widzimy ukształtowanie terenu oraz rozmieszczenie poszczególnych obiektów.
Ryc. 5. Dopasowanie zasięgu ortofotomapy do zasięgu NMT
Ryc. 6. Ustawienie przezroczystości ortofotomapy

5. Produkty LiDAR w projekcie ISOK
104
5.2.3. Korzystanie z Layout view
1. Większość zadań w oprogramowaniu ArcMap wykonywana jest w widoku danych. W tym ćwiczeniu, wirtualna strona z kompozycją mapy zostanie utworzona w widoku kompozycji. Z menu View wybierz Layout View.
2. Następnie zmień orientację strony z pionowej na poziomą Main Menu >> File >> Page and Print Setup…
3. W sekcji Map Page Size, zmień rozmiar na A4 oraz orientację na poziomą. Kliknij OK, aby zatwierdzić usta-wienia.
4. Teraz należy dostosować ramkę danych do wirtualnej strony oraz ustawić zakres danych. Najpierw należy dokonać ustawień właściwości strony kompozycji, aby rozmieścić wszystkie elementy mapy zgodnie z za-mysłem. Z menu Customize wybierz ArcMap Options.
5. Następnie wybierz zakładkę Layout View i zmień jednostki na Centimeters. W sekcji Snap elements to: zaznacz Guides (ryc. 7). Kliknij OK, aby zatwierdzić ustawienia. Guides (prowadnice) zapewniają wizualne wskazanie marginesów mapy, co pomaga uniknąć przesuwania elementów mapy poza marginesy.
6. Z menu wybierz View i sprawdź, czy jest zaznaczona opcja Rulers oraz Guides. Umieść wskaźnik myszy na pionowej linijce po lewej stronie, następnie kliknij prawym przyciskiem myszy i wybierz Set Guid. W kolej-nym kroku dostosuj wielkość ramki danych do prowadnic.
7. Jeśli to konieczne, na pasku narzędziowym Tools wybierz przycisk Select Elements. Kliknij ramkę danych, aby ją zaznaczyć. Obrys ramki danych jest zaznaczony niebieską przerywaną linią wraz z kwadratami w rogach i na środkach boków linii. Ramkę danych dostosuj do wcześniej ustawionych prowadnic (kliknij lewy górny, a następnie prawy dolny róg ramki danych i przeciągnij je do odpowiednich przecięć prowad-nic). Ramka danych będzie dociągana, gdy znajdzie się w pobliżu prowadnic (ryc. 8). Aby wyłączyć zazna-czenie ramki danych, kliknij gdziekolwiek na zewnątrz wirtualnej strony.
Ryc. 7. Przygotowanie Layout View

5.2. Przygotowanie kompozycji mapowej na podstawie produktów LiDAR i ortofotomapy
105
5.2.4. Przygotowanie kompozycji mapowej
1. W kolejnych krokach zostanie dodanych kilka podstawowych elementów kompozycji mapy, takich jak tytuł, legenda, podziałka liniowa czy dodatkowe opisy.
2. Z menu Insert wybierz Title. Na górze strony pojawi się podświetlone pole tekstowe. Kliknij dwukrotnie na tekst, aby wyświetlić okno właściwości. W sekcji Text wpisz tytuł tworzonej mapy, np. Mapa miejscowości Klępino i naciśnij Enter.
3. W oknie dialogowym właściwości wybierz Change Symbol. W oknie Symbol Selector zmień symbol, czcionkę, rozmiar i styl zgodnie z uznaniem. Nie ma żadnych ograniczeń, jednakże tytuł mapy powinien wy-pełnić większą część przestrzeni na górze strony. Zatwierdź zmianę, klikając OK i zamknij okno właściwości. Tytuł mapy należy ustawić tak, aby znalazł się w punkcie centralnym nad ramką danych. Należy pamiętać o zapisywaniu dokumentu mapy, aby nie stracić swojej pracy.
4. Następnym krokiem będzie wstawienie legendy do okna mapy. Dodawanie legendy jest procesem wielo-etapowym wykonywanym w kreatorze legendy (Legend Wizard). Legenda służy do objaśnienia symboli na mapie i może zawierać elementy z każdej warstwy.
5. Z menu Insert wybierz Legend. Zostanie otwarty kreator legendy. Po lewej stronie w sekcji Warstwy Mapy wyszczególniona jest lista wszystkich warstw znajdujących się na mapie (na szaro zaznaczone są grupy warstw). Z prawej strony wybierz warstwy, które będą zawarte w legendzie. Domyślnie, wszystkie warstwy są zaznaczone. W sekcji Legend Items, trzymając klawisz Ctrl, zaznacz warstwy: miejscowość, budynki, drogi, jezdnie, rzeki i strumienie, wody powierzchniowe, lasy, N-33-91-C-c-3-1.tif oraz N-33-91-C-c-3-2.tif (ryc. 9).
Ryc. 8. Dostosowanie ramki danych

5. Produkty LiDAR w projekcie ISOK
106
5. Po wybraniu odpowiednich warstw kliknij Next, aby przejść do następnego okna kreatora legendy. Niektó-re mapy wymagają wyświetlenia tytułu legendy z zastosowaniem ustalonego stylu.
6. W obszarze Legend Title pozostaw puste miejsce lub wpisz ‘Legenda’. Pozostałych ustawień nie należy mo-dyfikować, więc kliknij trzy razy Next, aby przejść do ostatniego etapu. Kliknij Finish w celu dodania legen-dy do mapy.
7. Zaznaczoną legendę należy przesunąć w prawy górny róg mapy (ryc. 10).
Ryc. 9. Wybór warstw do legendy mapy
Ryc. 10. Dodanie legendy mapy

5.2. Przygotowanie kompozycji mapowej na podstawie produktów LiDAR i ortofotomapy
107
8. W kolejnym kroku zostanie dodana do mapy podziałka liniowa. Na niektórych mapach podziałka liniowa nie jest wymagana. Podziałka liniowa umożliwia wizualną ocenę wielkości obiektów i odległości między nimi na mapie. Jeżeli mapa jest powiększana bądź pomniejszana, podziałka liniowa pozostaje w poprawnej relacji z mapą.
9. Z menu Insert wybierz Scale Bar. W oknie Scale Bar Selector wybierz Alternating Scale Bar 1. Następnie wybierz Properties i upewnij się, że w oknie dialogowym Scale Bar wybrana jest zakładka Scale and Units. W sekcji Units >> Division Units zmień jednostki na metry. W sekcji When resizing zmień ustawienie na Adjust numer of divisions. Następnie otwórz zakładkę Format. W sekcji Bar zmień kolor na Grey 50% (wiersz 6, kolumna 1). Aby zaakceptować ustawienia, kliknij Apply i OK. W oknie Scale Bar Selector również kliknij OK. Podziałkę przesuń w dolną część mapy i umieść ją pod ramką danych.
10. Kolejnym krokiem będzie dodanie tekstu opisującego skalę. Z menu Insert wybierz Scale Text, a następnie Absolute Scale. Wybierz Properties >> Format i zmień rozmiar tekstu na 12 pogrubiony. Aby zaakcepto-wać ustawienia, kliknij Apply i OK. W oknie Scale Text Selector również kliknij OK. Tekst skali ‘1:7 000’ należy przesunąć nad podziałkę liniową.
11. W okno mapy można również wstawić dodatkowy tekst, np. informacje o obszarze, komentarz, datę wyko-nania, imię i nazwisko autora.
Z menu Insert wybierz Dynamic Text >> Current Date. Następnie z menu Insert wybierz Text. W polu teksto-wym podaj autorstwo mapy, np. ‘Wykonał: Jan Kowalski, Urząd Gminy Stargard Szczeciński’. Po wpisaniu tekstu przesuń okno tekstowe w dolny prawy róg okna mapy.
12. Kompozycja mapy została zakończona, więc wyeksportuj ją i zapisz. W tym celu w menu głównym wybierz File >> Export map. Następnie wybierz folder 05_02_ArcGIS. W polu Save As wybierz JPEG (ryc. 11).
Ryc. 11. Mapa zapisana w formacie JPEG

5. Produkty LiDAR w projekcie ISOK
108
5.2.5. Podsumowanie
Głównym celem ćwiczenia było wygenerowanie mapy na podstawie produktów pochodnych z lotniczego ska-nowania laserowego. Korzystając z narzędzi dostępnych w ArcMap do mapy zostały dodane elementy takie jak:kompozycja mapy,
• legenda,• tytuł,• podziałka liniowa,• informacje o wykonawcy,• skala.
W ostatnim kroku zostały zaprezentowane możliwości eksportu mapy.
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

5.3. Wizualizacja 3D oraz wirtualny przelot z wykorzystaniem produktów LiDAR
109
5.3. Wizualizacja 3D oraz wirtualny przelot z wykorzystaniem produktów LiDAR
Ćwiczenie ma na celu przedstawienie możliwości narzędzi 3D w zakresie wizualizacji chmury punktów LiDAR oraz wygenerowanych produktów pochodnych. W ramach ćwiczenia uczestnicy utworzą trójwymiarową wizu-alizację obiektów i zaplanują trasę przelotu nad wybranym obszarem.
Szacowany czas wykonania ćwiczenia: 45 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\05_03_ArcGIS
• 05_03_ArcGIS.sxd – projekt mapy w formacie ArcScene;• Buildings.shp – budynki w formacie SHP;• Trees.shp – drzewa w formacie SHP;• N-33-91-C-c-3-1.tif – ortofotomapa w formacie TIFF, o rozdzielczości 10 cm;• N-33-91-C-c-3-2.tif – ortofotomapa w formacie TIFF, o rozdzielczości 10 cm;• Klepino_NMT.tif – numeryczny model terenu w formacie TIFF, o rozdzielczości 0,5 m.
Obszar: Klępino (powiat stargardzki, województwo zachodniopomorskie)
Oprogramowanie: ArcScene (Esri)
ETAPY REALIZACJI ĆWICZENIA
5.3.1. Uruchomienie oprogramowania ArcScene 10.2.1 i wczytanie projektu
1. Wciśnij kombinację klawiszy Windows+Q (klawisz Windows znajduje się obok klawisza Ctrl). W pojawia-jącym się po prawej stronie ekranu oknie Wyszukaj wpisz ciąg znaków ‘ArcScene’. Po kliknięciu w ikonę programu ArcScene, która pojawi się poniżej, nastąpi uruchomienie aplikacji. (W taki sposób możesz wy-szukiwać pliki w systemie Windows 8 lub 8.1).
2. W oknie powitalnym wskaż Existing Maps >> Browse for more. Następnie otwórz folder 05_03_ArcGIS i wybierz plik 05_03_ArcGIS.sxd (ryc. 1).
3. Wszystkie warstwy, zapisane w projekcie, zostaną wczytane i wyświetlone w Table of Contents: drzewa (trees), budynki (buildings), ortofotomapy N-33-91-C-c-3-2.tif / N-33-91-C-c-3-1.tif oraz numeryczny model terenu – Klepino_NMT.flt.
5.3.2. Ustawienie odpowiednich stylów symbolizacji danych
1. Domyślnie, w aplikacji ArcScene wszystkie obiekty w warstwie mają takie same symbole. Przykładowo, drzewa – obiekty punktowe – symbolizowane są jako pojedyncze punkty – kropki. W związku z tym, że punkt w wizualizacji 3D nie odzwierciedla wszystkich parametrów rzeczywistych drzewa, symbolizację należy zmienić.
2. W celu zmiany symbolizacji wybranej warstwy kliknij prawym klawiszem myszy na wybraną warstwę, a na-stępnie z listy poleceń wybierz Layer Properties (ryc. 1; nr 1). Poniższy przykład pokazuję zmianę symboli-zacji warstwy trees.

5. Produkty LiDAR w projekcie ISOK
110
3. W oknie Layer Properties wybierz zakładkę Symbology (ryc. 1; nr 2), a następnie kliknij w symbol (ryc. 1; nr 3). W oknie Symbol Selector w oknie wyszukiwania symboli wpisz ‘tree’ i zatwierdź klawiszem Enter (ryc.1; nr 4). W bazie symboli 3D zostaną wyszukane drzewa. Następnie wybierz drzewo (ryc. 1; nr 5) i wybierz kolor zielony (Tarragon Green) dla wybranego obiektu (ryc. 1; nr 6). Zaakceptuj wybór, klikając OK w oknie wyboru symbolizacji oraz Apply w oknie Layer Properties.
4. Kolejnym krokiem będzie zmiana symbolizacji warstwy buildings. W poprzednich etapach warstwa modeli dachów dla 3D budynków została wygenerowana z chmury punktów ALS, w związku z tym najprecyzyjniej zostały zeskanowane dachy budynków i w konsekwencji utworzona warstwa przedstawia właśnie dachy w postaci poligonów.
5. Zmiany symbolizacji warstwy buildings dokonujemy w ten sam sposób jak w przypadku warstwy drzewa. W tym przypadku nie ma możliwości zmiany symbolu na 3D.
6. W tabeli zawartości kliknij prawym klawiszem myszy na wybraną warstwę, a następnie z listy poleceń wy-bierz Layer Properties, otwórz zakładkę Symbology i kliknij w Symbol.
7. W oknie Symbol Selector w oknie wyszukiwania symboli wpisz ‘roof’ (dach) i zatwierdź klwiszem Enter. W bazie symboli zostaną wyszukane symbole pokrycia dachów. Następnie wybierz pokrycie Slate Roof i wybierz odpowiedni kolor dla wybranego obiektu np. czerwony. Zaakceptuj wybór, klikając OK w oknie wyboru symbolizacji oraz Apply w oknie Layer Properties.
5.3.3. Odpowiedni dobór parametrów symbolizacji danych
1. Symbolizacja warstwy drzew trees, która została zastosowana w poprzednim kroku odzwierciedla wygląd obiektów, ale nie przedstawia ich rzeczywistych parametrów, np. wysokości. Jednakże istnieje możliwość jej edycji, więc można ją dostosować. W celu ustawienia właściwej wysokości obiektów w warstwie trees, wybierz tę warstwę na liście w tabeli zawartości. Kliknij prawym klawiszem myszy na wybraną warstwę, następnie z listy poleceń wybierz Layer Properties, a następnie zakładkę Symbology. Rozwiń listę opcji Advanced i wybierz rozmiar symbolu (Size) (ryc. 2; nr 1). W oknie rozmiaru, z rozwijalnej listy dostępnych atrybutów wybierz Height (ryc. 2; nr 2) i zatwierdź wybór klikając OK.
1
3
5
4
6
Ryc. 1. Symbolizacja warstwy 3D–drzewa (trees)
2

5.3. Wizualizacja 3D oraz wirtualny przelot z wykorzystaniem produktów LiDAR
111
2. W oknie Layer Properties kliknij Apply. Wysokość obiektów zostanie automatycznie zaktualizowana (ryc. 3).
5.3.4. Wizualizacja danych
1. Informacja o strukturze powierzchni terenu pokazywana na obrazie rastrowym jest bardzo bogatym źró-dłem danych o terenie, jednak dodatkowe nałożenie tego obrazu na model powierzchni terenu uwidacz-nia pewne relacje między strukturą gruntu a ukształtowaniem terenu. W aplikacji ArcScene, można na po-wierzchni (GRID lub TIN) drapować warstwy tematyczne — zawierające dane rastrowe (GRID, obrazy) lub wektorowe (obiekty 2D) —przypisując im wysokości bazowe z tej powierzchni.
2. W celu udrapowania ortofotomapy na NMT, w tabeli zawartości aplikacji ArcScene wybierz prawym klawi-szem N-33-91-C-c-3-2.tif i otwórz jej właściwości (Properties).
3. Ustawiając poszczególne właściwości warstwy tematycznej można zmienić sposób jej wyświetlania na scenie. Wybierz zakładkę wysokości bazowych (Base Height) (ryc. 4; nr 1), a następnie zaznacz udrapo-wane na zadanej powierzchni (Floating on custom surface). Ponieważ TIN jest jedynym modelem po-wierzchni dostępnym w scenie, tylko warstwa Klepino_NMT jest widoczna na liście rozwijalnej; należy ją
1
2
Ryc. 2. Zmiana wysokość drzew
Ryc. 3. Zaktualizowana symbolizacja obiektów

5. Produkty LiDAR w projekcie ISOK
112
wybrać (ryc. 4; nr 2). Zaakceptuj wybór, klikając OK. Obraz rastrowy został udrapowany na numerycznym modelu terenu.
4. W celu udrapowania drugiej ortofotomapy na NMT, w tabeli zawartości aplikacji ArcScene wybierz prawym klawiszem N-33-91-C-c-3-1.tif i postępuj tak jak w przypadku udrapowania pierwszej ortofotomapy.
5. Warstwę numerycznego modelu terenu należy również udrapować na niej samej, więc postępuj zgodnie z krokami powyżej. W zakładce Base Height wskaż warstwę NMT jako powierzchnię odniesienia – drapowa-nia (ryc. 5; nr 1) oraz ustaw wartość przesunięcia warstwy (Layer Offset) na -1 (ryc. 5; nr 2). Znajdzie się ona wtedy nieco poniżej warstwy ortofotomap, dzięki czemu nie będzie prześwitywała przez rastry. Następnie potwierdź ustawienia, klikając OK.
6. Ortofotomapy zostaną dostosowane do zakresu numerycznego modelu terenu oraz obiekty – drzewa i bu-dynki – zostaną nałożone na NMT i ortofotomapę (ryc. 6).
1
2
Ryc. 4. Drapowanie rastra na NMT
Ryc. 5. Ustawienie parametrów drapowania NMT
1
2

5.3. Wizualizacja 3D oraz wirtualny przelot z wykorzystaniem produktów LiDAR
113
5.3.5. Wykonanie przelotu nad wybranym terenem
1. Na tym etapie ćwiczenia zostaną wykonane zadania związane z tworzeniem animacji. Najprostszy sposób utworzenia animacji polega na przejmowaniu kolejnych widoków, zapisywanych jako klatki (ramki główne) animacji. Przejmowane widoki są zdjęciami perspektyw kamery na scenie, wykonanymi w określonym czasie. Klatka jest najważniejszym elementem animacji. Ścieżka animacji powstaje wskutek interpolacji pomiędzy klatkami (ramkami głównymi). W kilku krokach zostanie utworzony zestaw klatek obrazujących interesujące miejsca na scenie, które wyznaczą ścieżkę ruchu kamery.
2. W celu stworzenia i oglądania animacji na scenie, włącz pasek narzędziowy Animation. Z menu Customize wybierz opcję Toolbars >> Animation. Widoczny na pasku animacji przycisk Capture View umożliwia tworzenie klatek kamery pokazując cały zasięg sceny. W przypadku klatki kamery, obiektem jest wirtualna kamera, przez którą widzimy scenę.
3. Prawym przyciskiem wskaż warstwę Klepino_NMT.flt i wybierz opcję Zoom to Layer i kliknij przycisk Capture View. Korzystając ze scrolla myszki przybliż się do wybranego obszaru tak, aby drzewa i budynki były dobrze widoczne. Następnie płynnie wykonaj przelot nad wybranym obszarem: poruszając myszką w prawo i w lewo przesuwaj scenę, natomiast poruszając scrollem przybliżaj się i oddalaj. Rejestrowany obraz powinien zawierać zarówno widok z góry na obiekty oraz widok pod innym kątem, np. z boku.
4. W celu zakończenia nagrywania przelotu wybierz ponownie przycisk Capture View. Dynamiczna wizualiza-cja została nagrana. Z paska animacji wybierz Open Animation Controls, aby ją obejrzeć. Pojawi się panel kontrolek animacji, z którego można odtworzyć animację, zastopować, wyłączyć oraz nagrać (ryc. 7).
Ryc. 6. Ortofotomapa oraz obiekty nałożone na NMT
Ryc. 7. Kontrolki animacji

5. Produkty LiDAR w projekcie ISOK
114
5. Nagrany przelot można wyeksportować do formatu AVI, który obsługiwany jest przez większość odtwarzaczy multimedialnych. W celu wykonania eksportu, z paska animacji wybierz Animation >> Export Animation (ryc. 8; nr 1). Następnie w oknie eksportu wpisz nazwę dla eksportowanego filmu: 05_03_ArcGIS.avi i kliknij Export (ryc. 8; nr 2). Film zostanie zapisany i będzie można obejrzeć go w programie dedykowanym odtwarzaniu filmów.
6. Po zakończeniu eksportu należy zamknąć aplikację ArcScene.
5.3.6. Podsumowanie
Głównym celem ćwiczenia było przygotowanie wizualizacji 3D obiektów wygenerowanych z lotniczego ska-nowania laserowego. Korzystając z narzędzi dostępnych w ArcScene, ortofotomapa została udrapowana na Numeryczny Model Terenu, jak również zostały wyświetlone i odpowiednio zasymbolizowane obiekty 3D re-prezentujące drzewa oraz budynki. Dzięki wizualizacji 3D oraz narzędziom animacji został przygotowany wir-tualny przelot nad wybranym obszarem.
1
2
Ryc. 8. Eksport animacji do formatu AVI
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

5.4. Tworzenie i walidacja metadanych NMT z wykorzystaniem edytora i walidatora metadanych dostępnych poprzez Geoportal.gov.pl
115
5.4. Tworzenie i walidacja metadanych NMT z wykorzystaniem edytora i walidatora metadanych dostępnych poprzez Geoportal.gov.pl
Ćwiczenie ma na celu omówienie zagadnień związanych z metadanymi NMT tworzonymi dla zbiorów danych pomiarowych LiDAR, NMT i NMPT.
Szacowany czas wykonania ćwiczenia: 25 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\05_04_Metadane
• NMT.ISOK.XYZ.M-34-47-C-c-2-1.xml – plik XML z metadanymi pliku NMT.
Obszar: okolice Zamościa
Oprogramowanie: Edytor metadanych, Walidator metadanych – Geoportal.gov.pl
ETAPY REALIZACJI ĆWICZENIA
5.4.1. Uruchomienie edytora metadanych
1. W celu uruchomienia edytora metadanych, w przeglądarce internetowej (np. Firefox) wprowadź adres: http://geoportal.gov.pl/.
2. Na stronie głównej wybierz pole Edytor metadanych. Zostanie uruchomiona strona startowa (ryc. 1).
5.4.2. Wczytanie pliku metadanych NMT
1. W celu wczytania pliku metadanych wybierz opcję Plik, a z pojawiającego się menu rozwijalnego wybierz pozycję Wczytaj (ryc. 2).
2. Po otwarciu okna Wczytaj Plik wskaż plik *.xml w katalogu ćwiczenia oraz wybierz rodzaj profilu metada-nych (w przypadku metadanych dla zbiorów danych numerycznego modelu terenu jest to profil NMT). Po wczytaniu pliku potwierdź wybór przyciskiem Dalej (ryc. 3).
Ryc. 1.Strona startowa edytora metadanych
Ryc. 2. Wczytywanie pliku meta-danych

5. Produkty LiDAR w projekcie ISOK
116
3. Po wczytaniu pliku metadanych, na ekranie pojawi się formularz z zakładkami dla danego profilu i zbioru danych. W celu poprawnej walidacji pliku metadanych konieczne jest wypełnienie pól metadanych ozna-czonych kolorem niebieskim (ryc. 4).
5.4.3. Omówienie poszczególnych opisów metadanych
Metadane profilu NMT zgrupowane są w zakładkach, ułatwiających użytkownikowi poruszanie się po edytorze:• Metadane na temat metadanych zawiera podstawowe informacje dotyczące pliku metadanych wczy-
tanych do Edytora. Sekcja ta składa się z następujących elementów: − Punkt kontaktowy, zawierający dane kontaktowe podmiotu odpowiedzialnego za wytworzenie
metadanych (w przypadku metadanych ISOK jest to Centralny Ośrodek Dokumentacji Geodezyj-nej i Kartograficznej);
− Data metadanych jest to termin, w jakim metadane zostały zmodyfikowane lub utworzone; − Wersja normy metadanych to standard, w jakim przygotowane zostały dane (dla metadanych
ISOK jest to ISO 19115); − Identyfikator pliku metadanych – globalny unikatowy identyfikator (GUID), który jednoznacz-
nie identyfikuje plik metadanych; − Standard zapisu znaków – w przypadku metadanych ISOK jest to utf8; − Język metadanych – dla metadanych ISOK jest to język polski (wartość „pol”).
• Identyfikacja zasobu zawiera dane dotyczące szczegółowych informacji o zasobie, dla jakiego zapisane są metadane. Poszczególne elementy tej sekcji, na które warto zwrócić uwagę to:
− Tytuł zasobu, opisujący jakich danych dotyczą metadane (np. Numeryczny model terenu ASCII XYZ 2013 1 m M-34-47-C-c-2-1);
− Alternatywny tytuł zasobu, który zawiera uszczegółowiony opis danych (np. numer bloku LiDAR); − Streszczenie opisujące tekstowo dane, których dotyczą metadane;
• Położenie geograficzne grupuje informacje dotyczące zasięgu warstwy o których mowa w metada-nych oraz jej układu współrzędnych. W tej sekcji warto zwrócić uwagę na:
− Układ współrzędnych – dla danych ISOK jest to PL-1992, posiadający kod EPSG równy 2180; − Geograficzny prostokąt ograniczający reprezentowany przez współrzędne w elipsoidalnym
systemie odniesień przestrzennych ETRS89 (EPSG: 4258), opisujące zasięg danych;• Odniesienie czasowe zawiera informacje czasową o danych, których dotyczą metadane:
− Data odniesienia dla zasobu określająca zakres, dla którego mają zastosowanie metadane;
Ryc. 3. Okno wczytywania pliku metadanych
Ryc. 4. Pola metadanych

5.4. Tworzenie i walidacja metadanych NMT z wykorzystaniem edytora i walidatora metadanych dostępnych poprzez Geoportal.gov.pl
117
• Organizacja odpowiedzialna posiada informacje odnośnie organu, który odpowiedzialny jest za zarzą-dzanie, przechowywanie oraz publikację danych. W przypadku danych projektu ISOK jest to Centralny Ośrodek Dokumentacji Geodezyjnej i Kartograficznej;
• Informacje o zarządzaniu zasobem to dane o ewentualnych aktualizacjach danych;• Słowa kluczowe przechowują listę wybranych dla danego zasobu słów kluczowych, opisujących cha-
rakter danych;• Warunki dostępu i użytkowanie danych to informacje o stosowności użycia zasobu oraz ewentual-
nych ograniczeniach;• Jakość i ważność zawiera dane o rozdzielczości przestrzennej i czasowej zbioru oraz informacje o do-
kładności, kompletności oraz spójności danych. W tej sekcji warta uwagi jest: − Rozdzielczość przestrzenna. Dla przykładu NMT, którego metadane analizowane są w ćwicze-
niu, wartość 1 oznacza rozdzielczość przestrzenną rastra wynikowego;• Klasyfikacja danych przestrzennych przyporządkowuje zbiór do zdefiniowanej kategorii tematycznej;• Informacja o dystrybucji informuje użytkownika o formacie w jakim przekazywane są dane (w analizo-
wanym pliku metadanych jest to format ASCII);• Zgodność przechowuje informacje o rodzaju specyfikacji, z którymi zgodne są dane.
5.4.4. Walidacja pliku XML
Walidator metadanych (http://walidator.geoportal.gov.pl/walidatormetadanych) to aplikacja sieciowa służą-ca weryfikacji zgodności plików metadanych z normami i przepisami wykonawczymi. Weryfikacja odbywa się poprzez badanie zgodności ze schematem XML zapisanym w postaci pliku XSD (XML Schema Definition). W ćwiczeniu przeprowadzona zostanie walidacja tego samego pliku XML, który został wczytany do edytora (NMT.ISOK.XYZ.M-34-47-C-c-2-1.xml).
1. W celu uruchomienia modułu walidacji metadanych w przeglądarce internetowej (np. Firefox) wprowadź adres: http://geoportal.gov.pl/, a następnie na stronie głównej wybierz pole Walidator. Zostanie urucho-miona strona startowa (ryc. 5).
2. Wybierz Profil jako NMT (ryc. 5; nr 1), a Źródło jako XML (ryc. 5; nr 2). Po wskazaniu parametrów wczytania, z prawej strony okna wybierz przycisk z symbolem „+” (ryc. 5; nr 3) i w nowo otwartym oknie wskaż plik NMT.ISOK.XYZ.M-34-47-C-c-2-1.xml, znajdujący się w katalogu ćwiczenia. Po wczytaniu pliku do programu, uruchom narzędzie walidacyjne, klikając Waliduj (ryc. 5; nr 4). Po zakończeniu procesu, w oknie wynik po-winien pojawić się komunikat Walidacja profilem NMT zakończona powodzeniem.
3. Wyniki walidacji można zapisać na dysk lokalny w postaci pliku tekstowego w formacie TXT, przy pomocy przycisku Zapisz wyniki na dysku (ryc. 5; nr 5), który znajduje się w dole ekranu Walidatora. Funkcja ta jest niezmiernie istotna w przypadku występowania błędów w walidacji metadanych. Zapisując wyniki w po-staci pliku tekstowego, można je następnie otworzyć w edytorze tekstu podczas poprawy metadanych, co ułatwia wyszukiwanie błędnych elementów.
5.4.5. Utworzenie nowego pliku metadanych
1. Kreator metadanych, oprócz możliwości edycji już istniejących plików, pozwala także na tworzenie nowych metadanych. W tym celu w oknie głównym edytora metadanych wybierz Plik a z pojawiającego się menu rozwijalnego pozycję Nowy (ryc. 6).
Ryc. 5. Okno główne modułu Walidator
1
5
24
3

5. Produkty LiDAR w projekcie ISOK
118
2. Pojawiające się okno konfiguracji pozwala na wybór typu zbioru oraz profilu tworzonych metadanych. Me-tadane tworzone są dla serii zbiorów danych, zbiorów danych oraz usług geoinformatycznych:• seria danych jest skończoną kolekcją zbiorów danych przestrzennych,• zbiór danych to jednorodny zbiór opracowany w ramach określonego produktu przestrzennego,• usługa to operacja, która przetwarza informację geograficzną, zarządza nią oraz przedstawia ją użyt-
kownikom.
3. W oknie wybierz typ zbioru: Zbiór oraz profil jako NMT (ryc. 7).
4. Po zatwierdzeniu wyboru, na ekranie pojawi się pusty formularz do utworzenia metadanych. W zakładce Metadane na temat metadanych wprowadź wszystkie wymagane informacje, następnie wybierz plik >> zapisz plik (lokalizacją jest folder ćwiczeniowy), a następnie otwórz go w przeglądarce. W celu otwarcia pliku w dowolnej przeglądarce internetowej, najpierw włącz przeglądarkę, a następnie złap wybrany plik XML, przenieś go w obszar okna przeglądarki i upuść.
5. Po otwarciu pliku XML w dowolnym edytorze tekstu, jego układ powinien być zbliżony do tego, który znaj-duje się poniżej (ryc. 8).
Ryc. 6. Tworzenie metadanych
Ryc. 7. Wybór parametrów formularza metadanych
Ryc. 8. Struktura pliku XML

5.4. Tworzenie i walidacja metadanych NMT z wykorzystaniem edytora i walidatora metadanych dostępnych poprzez Geoportal.gov.pl
119
Język XML jest językiem znaczników, zaprojektowanym przez World Wide Web Consortium (www.w3.org). Znaczniki znajdują się między znakami < >; są one otwierające (np. <gmd.contact>) oraz zamykające (np. </gmd.contact>). Struktura pliku XML posiada wcięcia, co oznacza, że każdy poziom za-gnieżdżenia tekstu musi zawierać wcięcie względem tego o wyższej randze.
5.4.6. Podsumowanie
Celem ćwiczenia było nabycie umiejętności obsługi Edytora Metadanych i walidacji pliku metadanych. Zostały również zaprezentowane poszczególne informacje zawarte w pliku metadanych. Dysponując plikiem meta-danych, mamy możliwość uzyskania jednoznacznych informacji na temat aktualności danych, ich źródła oraz innych informacji dotyczących tych danych. Jest to niezmiernie istotne dla poprawnego projektowania algo-rytmów przetwarzania danych, a także dla interpretacji wyników analiz.
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

120
6. Kontrola produktów LiDAR
6.1. Kontrola parametru gęstości chmury punktów LiDAR
Celem ćwiczenia jest zapoznanie użytkownika z procesem kontroli gęstości danych LiDAR i wynikami kontroli opracowanymi przez Inspektora Nadzoru i Kontroli na przykładzie Bloku LiDAR nr 6407.
Szacowany czas wykonania ćwiczenia: 20 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\06_01_TERRA
• 6407_gestosc_cw.dgn – plik z danymi wektorowymi;• 6407_GestoscModul.txt – zestawienie wyników kontroli gęstości dla modułów w Bloku LiDAR;• 6407_GestoscProbka.txt – zestawienie wyników kontroli gęstości dla próbek w Bloku LiDAR;• 6407_MapaGestosc.asc – mapa gęstości, zawierająca średnie wartości gęstości dla wszystkich
próbek Bloku LiDAR 6407;• folder gestosc_probki z danymi LiDAR (arkusz M-34-59-A-b-1-3-4) przekonwertowanymi na projekt.
W plikach pozostały punkty z jednym oraz ostatnim echem, dla wszystkich klas oprócz Overlap Points, a także Low Points.
Obszar: okolice Zamościa
Oprogramowanie: Map PowerView v8i (Bentley), TerraScan (Terrasolid)
ETAPY REALIZACJI ĆWICZENIA
6.1.1. Omówienie procesu kontroli gęstości danych LiDAR (WT INiK 2013/2014)
1. Przed przystąpieniem do pomiaru gęstości danych LiDAR przygotowywane są wektorowe dane pomocni-cze, na które składają się:• zasięgi próbek pomiaru gęstości (próbka o wymiarach 25 m × 25 m),• zasięgi modułów archiwizacji produktu 1 (arkusze w układzie PL-1992 o skali zależnej od standardu
produktu 1),• zasięgi obszarów o słabym odbiciu,• zasięg obszaru danych Bloku LiDAR (zewnętrzny obrys wszystkich szeregów w Bloku LiDAR).
2. Pomiar gęstości danych LiDAR dla próbek jest wykonywany dla obszaru całego Bloku LiDAR wraz z margi-nesem. Sprawdzenie wartości gęstości danych LiDAR obejmuje wszystkie klasy oprócz punktów zaklasyfi-kowanych do klasy punktów z obszarów wielokrotnego odbicia oraz punktów będących błędami rejestracji skanera. Istotna jest również kolejność odbicia promienia lasera, ponieważ do analizy wykorzystywane są jedynie punkty ostatniego oraz pojedynczego odbicia.
3. Gęstość danych LiDAR jest obliczana jako stosunek wyselekcjonowanej liczby punktów do powierzchni próbki (powierzchnia próbki wynosi 625 m2) z dokładnością do 0,1 pkt/m2. Analiza gęstości danych LiDAR w marginesie Bloku LiDAR uwzględnia zakres przekazanych danych. Za próbkę spełniającą wymagania

6.1. Kontrola parametru gęstości chmury punktów LiDAR
121
uznawana jest taka, której wskaźnik gęstości otrzymał wartość ≥ 4,0 pkt/m2 oraz taka, która pokrywa obszar o słabym odbiciu.
4. Kolejnym poziomem sprawdzenia jest analiza gęstości dla modułów archiwizacji. Każda z próbek zosta-je przypisana do jednego modułu archiwizacji, jeżeli lewy górny narożnik próbki znajduje się wewnątrz modułu archiwizacji produktu 1 (chmura punktów ALS). Dla każdego modułu archiwizacji produktu 1 gę-stość jest obliczana jako średnia arytmetyczna z próbek danego modułu, bez uwzględniania próbek znaj-dujących się w obszarach o słabym odbiciu. Moduł archiwizacji uznaje się za spełniający wymagania gę-stości danych LiDAR, gdy uzyskana średnia wartość gęstości danych LiDAR dla modułu będzie ≥ 4,0 pkt/m2 oraz 95% próbek otrzyma status „spełnia wymagania”.
5. Blok LiDAR spełnia wymagania, jeżeli 100% modułów archiwizacji produktu 1 otrzyma status „spełnia wy-magania”. Niestandardowe sytuacje dotyczące szacowania jakości wyjaśniane są poprzez uzgodnienia po-między Inspektorem Nadzoru i Kontroli a Zamawiającym (Głównym Urzędem Geodezji i Kartografii).
6. W kolejnym etapie uczestnik zapozna się z wynikami kontroli dla Bloku LiDAR nr 6407.
6.1.2. Weryfikacja wyników z kontroli gęstości danych LiDAR
1. Otwórz plik 6407_gestosc_cw.dgn z folderu ćwiczeniowego.
2. Użyj przycisku Fit View (ryc. 1), znajdującego się na pasku narzędziowym okna widoku, aby przybliżyć się do zasięgu widocznych warstw (ryc. 2).
3. Włącz okno Level Display (ryc. 3), poprzez skrót Ctrl+E. W tym oknie klikając na nazwy poszczególnych warstw możemy je odpowiednio wyświetlić lub wygasić w wybranym widoku.
Ryc. 1. Pasek narzędziowy okna widoku programu Bentley Map PowerView
Ryc. 2. Plik wynikowy z kontroli gęstości bloku LiDAR. Obrys czerwony: zasięg bloku LiDAR ; na niebiesko: zasięgi modułów archiwizacji; na zielono: próbki speł-niające warunek gęstości; na czerwono: próbki niespełniające warunku gęstości;
na jasnoniebiesko: próbki w obszarze słabego odbicia

6. Kontrola produktów LiDAR
122
4. Zapoznaj się z poszczególnymi warstwami pliku DGN włączając/wyłączając ich widoczność (ryc. 3). Warstwa:• Blok6407 – zasięg Bloku LiDAR;• Moduł archiwizacji produktu 1 ze statusem „nie spełnia wymagań”;• Moduł archiwizacji produktu 1 ze statusem „spełnia wymagania”;• Próbka ze statusem „nie spełnia wymagań”;• Próbka ze statusem „spełnia wymagania”;• Próbka ze statusem „spełnia wymagania” z przypisanym komentarzem, np. próbki pokrywające obszar
o słabym odbiciu.
5. W aplikacji TerraScan wczytaj projekt 6407_M-34-59-A-b-1-3-4_gestosc.prj, wybierając z paska narzędzio-wego TerraScan ikonę Define Project (ryc. 4), a następnie w oknie Define Project, File >> Open project.
W projekcie tym został przygotowany jeden moduł Bloku LiDAR 6407 o godle M-34-59-A-b-1-3-4. Z całego arkusza odfiltrowano punkty z jednym oraz ostatnim echem, dla wszystkich klas oprócz Overlap Points, a także Low Points. Otrzymaną chmurę punktów LiDAR przygotowano do formatu próbek (25 m x 25 m).
6. W celu obliczenia gęstości dla konkretnej próbki kliknij w jej obszarze po wybraniu funkcji z okna TerraScan File >> Open block. Na belce zostanie wyświetlona liczba punktów zawartych w próbce, którą podziel przez 625.
Ryc. 3. Okno narzędzia Level Display pokazujące widoczne oraz wygaszone warstwy w aktywnym widoku
Ryc. 4. Włączanie okna projektu w aplikacji TerraScan
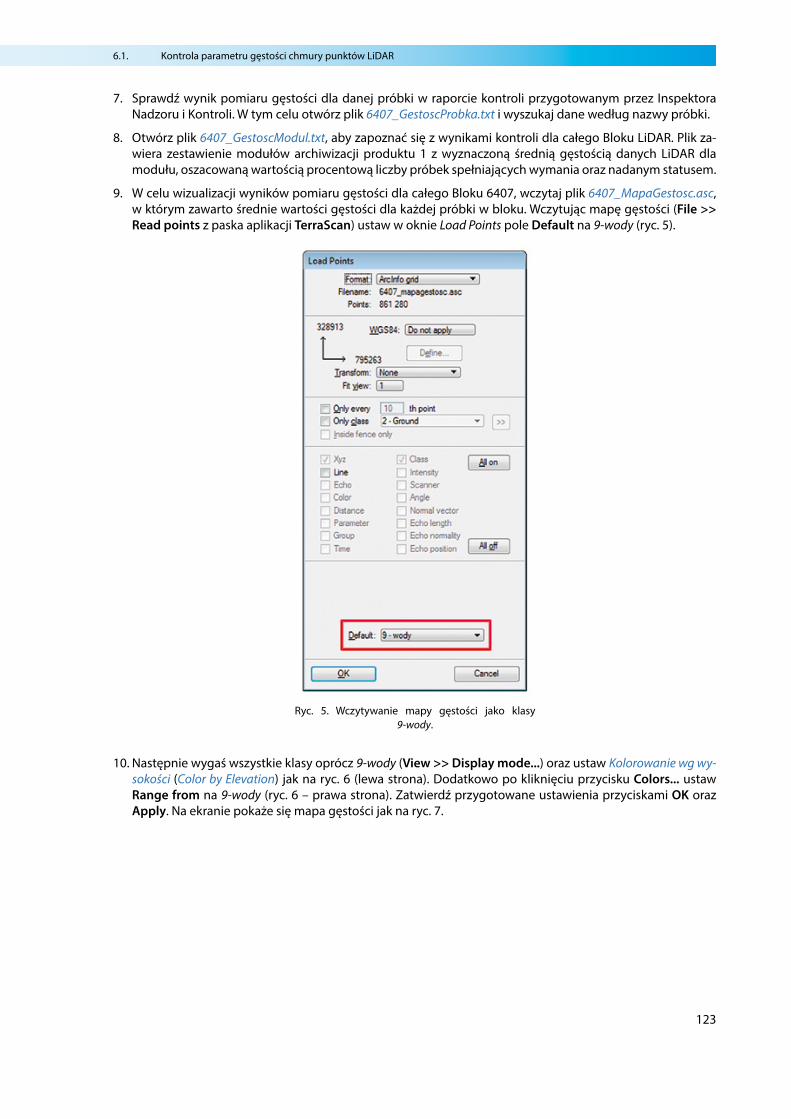
6.1. Kontrola parametru gęstości chmury punktów LiDAR
123
7. Sprawdź wynik pomiaru gęstości dla danej próbki w raporcie kontroli przygotowanym przez Inspektora Nadzoru i Kontroli. W tym celu otwórz plik 6407_GestoscProbka.txt i wyszukaj dane według nazwy próbki.
8. Otwórz plik 6407_GestoscModul.txt, aby zapoznać się z wynikami kontroli dla całego Bloku LiDAR. Plik za-wiera zestawienie modułów archiwizacji produktu 1 z wyznaczoną średnią gęstością danych LiDAR dla modułu, oszacowaną wartością procentową liczby próbek spełniających wymania oraz nadanym statusem.
9. W celu wizualizacji wyników pomiaru gęstości dla całego Bloku 6407, wczytaj plik 6407_MapaGestosc.asc, w którym zawarto średnie wartości gęstości dla każdej próbki w bloku. Wczytując mapę gęstości (File >> Read points z paska aplikacji TerraScan) ustaw w oknie Load Points pole Default na 9-wody (ryc. 5).
10. Następnie wygaś wszystkie klasy oprócz 9-wody (View >> Display mode...) oraz ustaw Kolorowanie wg wy-sokości (Color by Elevation) jak na ryc. 6 (lewa strona). Dodatkowo po kliknięciu przycisku Colors... ustaw Range from na 9-wody (ryc. 6 – prawa strona). Zatwierdź przygotowane ustawienia przyciskami OK oraz Apply. Na ekranie pokaże się mapa gęstości jak na ryc. 7.
Ryc. 5. Wczytywanie mapy gęstości jako klasy 9-wody.

6. Kontrola produktów LiDAR
124
6.1.3. Podsumowanie
W ramach ćwiczenia uczestnik szkolenia zapoznał się z procesem kontroli gęstości chmury punktów LiDAR. Wykorzystując przygotowane wcześniej dane wektorowe oraz chmury punktów ALS, samodzielnie dokonał weryfikacji uzyskanych wyników gęstości chmury punktów ALS dla wybranej próbki. Proces kontroli gęstości można przeprowadzić również w innych programach.
Ryc. 6. Ustawienia wyświetlania mapy gęstości w aplikacji TerraScan
Ryc. 7. Mapa gęstości dla wszystkich próbek Bloku LiDAR 6407

6.2. Kontrola georeferencji względnej Bloku LiDAR
125
6.2. Kontrola georeferencji względnej Bloku LiDAR
Celem ćwiczenia jest zapoznanie uczestnika szkolenia z procesem kontroli georeferencji względnej Bloku LiDAR. Kontrola georeferencji względnej Bloku LiDAR polega na wskazaniu obiektów kontrolnych na poszcze-gólnych szeregach niezależnie w pasach wielokrotnego pokrycia, a następnie na porównaniu parami położe-nia obiektów między poszczególnymi pasami pokrycia.
Szacowany czas wykonania ćwiczenia: 20 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\06_02_TERRA
• 06_02_TERRA_6407.dgn–plik z danymi wektorowymi i zaznaczonymi obszarami wykonania ćwi-czenia;
• 06_02_TERRA.xls – przygotowany arkusz kalkulacyjny do obliczenia rozbieżności na obiektach kon-trolnych;
• overlap2class.mac–makropolecenie automatycznie wyodrębniające z obszaru wielokrotnego pokrycia chmury punktów klasy Ground, Low Vegetation, Medium Vegetation, High Vegetation oraz Building;
• 6407_wzgledna.las–fragment sklasyfikowanej chmury punktów ALS z Bloku LiDAR nr 6407 (format LAS 1.2 Data Point Record Format 3).
Obszar: okolice Zamościa
Oprogramowanie: Map PowerView V8i (Bentley), TerraScan (Terrasolid), TerraModeler (Terrasolid)
ETAPY REALIZACJI ĆWICZENIA
6.2.1. Kontrola sytuacyjno-wysokościowa
1. W celu wykonania ćwiczenia otwórz plik 06_02_TERRA_6407.dgn, znajdujący się w folderze ćwiczeniowym, a następnie wczytaj dane LiDAR (File >> Read points aplikacja TerraScan) z pliku 6407_wzgledna.las. Dane zostaną wczytane w obszarze zaznaczonym na czerwono. W celu sprawdzenia ustawień wyświetlania (kolor punktu–klasa) wybierz z paska aplikacji TerraScan polecenie View >> Display mode...
2. Kolejnym krokiem jest pozostawienie danych tylko z jednego pasa pokrycia (flightline). W tym celu z paska aplikacji TerraScan wybierz polecenie Point >> Delete >> By flightline (ryc. 1). Wybierz Flightline 39 – punkty ze wskazanego szeregu zostaną usunięte.
3. Samodzielnie narysuj Ogrodzenie (Place Fence z zakładki Task aplikacji Bentley Map PowerView v8i) w obszarze ograniczonym niebieskim obrysem. Następnie w oparciu o punkty, które pozostały, dokonaj automatycznej wektoryzacji budynków, wykorzystując polecenie Vectorize Buildings z paska aplikacji TerraScan z parametrami jak na ryc. 2.
Ryc. 1. Okno usuwania punk-tów według nazwy szeregu

6. Kontrola produktów LiDAR
126
4. W następnym kroku narysuj linię na warstwie odpowiadającej nazwie pozostawionego szeregu przy użyciu narzędzia Place SmartLine z paska Base geometry aplikacji Bentley Map PowerView v8i. Końce linii muszą być przyciągnięte do modelu budynku. Zamknij chmurę punktów (pasek aplikacji TerraScan: File >> Close file). Uwaga: Istotne jest, aby nie zapisywać zmian w zamykanym pliku.
5. Wykonaj analogiczne operacje dla drugiego szeregu (usuń Flightline 38), rysując kalenicę na podstawie punktów chmury z jednego szeregu. Jeżeli dla któregoś z pasów pokrycia punkty reprezentujące budynek znajdują się w klasie Overlap Points, uruchom w obszarze ograniczonym Ogrodzeniem (Fence), makropo-lecenie overlap2class.mac za pomocą narzędzi Tools >> Macro aplikacji TerraScan.
6. W celu obliczenia odchyłek, na obiektach sytuacyjno-wysokościowych zaznacz narysowane kalenice i wy-eksportuj ich współrzędne do zewnętrznego pliku tekstowego. Eksportu dokonuje się poprzez polecenie Export Coordinates z paska XYZ Text aplikacji Bentley Map PowerView v8i. Plik zapisz w folderze z danymi wejściowymi pod nazwą kalenice.txt z parametrami jak na ryc. 3.
7. Współrzędne zawarte w pliku tekstowym skopiuj do arkusza obliczeniowego 06_02_TERRA.xls w taki sposób, aby odpowiadające sobie końce kalenic znajdowały się w tych samych wierszach tabeli Obiekt kon-trolny sytuacyjno-wysokościowy. Odchyłki: sytuacyjna i wysokościowa obliczą się automatycznie pod tabelą.
8. Otrzymane wyniki nie przekraczają wartości 0,22 m w zakresie dokładności wysokościowej oraz 0,75 m w zakresie dokładności sytuacyjnej.
Ryc. 2. Okno polecenia Vectorize Buildings wraz z ustawieniami parametrów
Ryc. 3. Okno eksportu współrzędnych

6.2. Kontrola georeferencji względnej Bloku LiDAR
127
6.2.2. Kontrola wysokościowa
1. W celu pozyskania danych do analizy wysokościowej dla danego szeregu (Flightline 38) usuń dane ALS przypisane do pozostałych pasów–Flightline 39 (Point >> Delete >> By flightline, aplikacja TerraScan).
2. Utwórz model powierzchni gruntu dla wyodrębnionego szeregu (pasek narzędzi TerraScan: Create Editable Model – tylko klasa 2–Ground).
3. Jeżeli w danym zakresie żadne punkty nie są przypisane do klasy 2–Ground (tylko wszystkie do klasy Overlap Points) przeprowadź reklasyfikację wybierając z „belki” aplikacji TerraScan kolejno Classify >> Routine >> Ground. Tworzoną powierzchnię nazwij zgodnie z nazwą pasa pokrycia, z którego wykorzystywane są punkty chmury (np. gr_38).
4. Następnie wstaw punkt w obszarze zielonego prostokąta (Base geometry >> Place Active Point w Bentley Map PowerView v8i) i skopiuj go w formie siatki 3 x 3 o oczku 1,0 m (Construct Array z paska Manipulate aplikacji Bentley Map PowerView v8i). Wszystkie punkty muszą znaleźć się na drodze, w zakresie zielone-go prostokąta.
5. Kolejnym krokiem jest nadanie punktom siatki wysokości gruntu, poprzez zrzutowanie punktów na model/powierzchnię. W aplikacji TerraModeler zadanie takie wykonuje się przy pomocy polecenia Drop Element On Surface (ryc. 4).
6. Zrzutowane punkty zaznacz i wyeksportuj ich współrzędne do zewnętrznego pliku tekstowego. W tym celu wybierz polecenie Export Coordinates z paska XYZ Text aplikacji Bentley Map PowerView v8i, a plik zapisz w folderze z danymi wejściowymi pod nazwą siatka_38.txt.
7. Dla drugiego pasa pokrycia (Flightline 39) wykonaj analogiczne operacje, zmieniając w nazwach oznacze-nie z 38 na 39 (kroki 1-3 oraz 5-6).
8. Ostatnim etapem kontroli wysokościowej jest wygenerowanie raportu w aplikacji TerraModeler (Terrasolid) uruchamiając polecenie Utility >> Output control report. Po ustawieniu parametrów jak na ryc. 5, wybierz OK, a aplikacja przejdzie do automatycznego generowania raportu. Otrzymane wyniki dotyczą porównania siatki punktów z wysokościami pozyskanymi z szeregu 39 z modelem utworzonym na danych LiDAR w zakresie klasy Ground z szeregu 38. Wynikowe zestawienie można zapisać do pliku tekstowego.
Ryc. 4. Rzutowanie punktów siatki wysokościowej na model powierzchni
Ryc. 5. Okno generowania raportu Output control report w aplikacji TerraModeler

6. Kontrola produktów LiDAR
128
9. Kontrolnie, skopiuj zawartość plików tekstowych siatka_38.txt oraz siatka_39.txt do zaznaczonych na czer-wono komórek w arkuszu kalkulacyjnym, tabela „Obiekt kontrolny wysokościowy”, po czym rozbieżność wy-sokościowa zostanie obliczona automatycznie. Wyniki przedstawiają różnice wysokości pomiędzy siatkami pozyskanymi na podstawie danych LiDAR z szeregu 38 i 39.
10. Otrzymany wynik nie przekracza wartości 0,22 m w zakresie dokładności wysokościowej.
6.2.3. Podsumowanie
W ramach ćwiczenia uczestnik szkolenia zapoznał się z procesem kontroli georeferencji względnej. Wykorzy-stując przygotowane wcześniej dane wektorowe oraz dane LiDAR, samodzielnie pozyskał z chmury punktów ALS współrzędne punktów niezbędne do obliczenia rozbieżności pomiędzy poszczególnymi szeregami nalotu na wybranym obiekcie kontrolnym.
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

6.3. Kontrola georeferencji bezwzględnej danych LiDAR
129
6.3. Kontrola georeferencji bezwzględnej danych LiDAR
Celem ćwiczenia jest zapoznanie uczestnika szkolenia z procesem kontroli nadania georeferencji bezwzględ-nej danym LiDAR. Kontrola poprawności nadania georeferencji bezwzględnej chmurze punktów ALS polega na porównaniu lokalizacji obiektów kontrolnych pomierzonych w terenie (RTK GNSS) z obiektami identyfiko-wanymi w danych LiDAR
Szacowany czas wykonania ćwiczenia: 20 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\06_03_TERRA
• 06_03_TERRA.dgn – projekt zapisany w oprogramowaniu Bentley Map PowerView;• 6407.prj – plik projektowy programu TerraScan (Terrasolid);• sklasyfikowane chmury punktów ALS z atrybutami RGB (format LAS 1.2 Data Point Record
Format 3): − M-34-47-C-c-2-4-2.las; − M-34-59-A-b-1-1-2.las; − M-34-59-B-a-2-1-2.las; − M-34-59-B-a-1-1-3.las; − M-34-59-B-a-4-1-3.las; − M-34-59-A-b-4-4-4.las;
• 06_03_TERRA.xls – arkusz obliczeniowy z porównaniem danych pozyskanych z chmury punktów LiDAR z danymi z pomiarów terenowych;
• W01xyz.txt – plik tekstowy ze współrzędnymi terenowymi obiektu kontrolnego.
Obszar: okolice Zamościa
Oprogramowanie: TerraScan (Terrasolid), Map PowerView (Bentley)
ETAPY REALIZACJI ĆWICZENIA
6.3.1. Uruchomienie programu i wczytanie projektu
1. W celu realizacji ćwiczenia otwórz plik 06_03_TERRA.dgn znajdujący się w folderze ćwiczeniowym. Aplika-cja TerraScan zostanie uruchomiona automatycznie.
2. Wybierz odpowiedni projekt za pomocą Define Project >> File >> Open project… >> 6407.prj z paska narzędziowego General aplikacji TerraScan z lokalizacji D:\Szkolenia_LiDAR\Cwiczenia\06_03_TERRA.
3. Za pomocą narzędzia Level Display przejrzyj strukturę pliku szkoleniowego. Warstwa o nazwie pomiary_terenowe zawiera punkty wyznaczające obiekty kontrolne pomierzone w terenie (ryc. 1). W celu sprawdzenia położenia danych pomiarowych na chmurze punktów za pomocą funkcji File >> Open block (TerraScan), otwórz dowolne arkusze danych zawierające obiekty sytuacyjne oznaczone nazwą ’SW’ i obiekty wysokościowe oznaczone za pomocą ‘W’. Za pomocą opcji View >> Display mode wyświetl chmurę punktów po atrybutach RGB, w polu Color by wybierz opcję Point color.
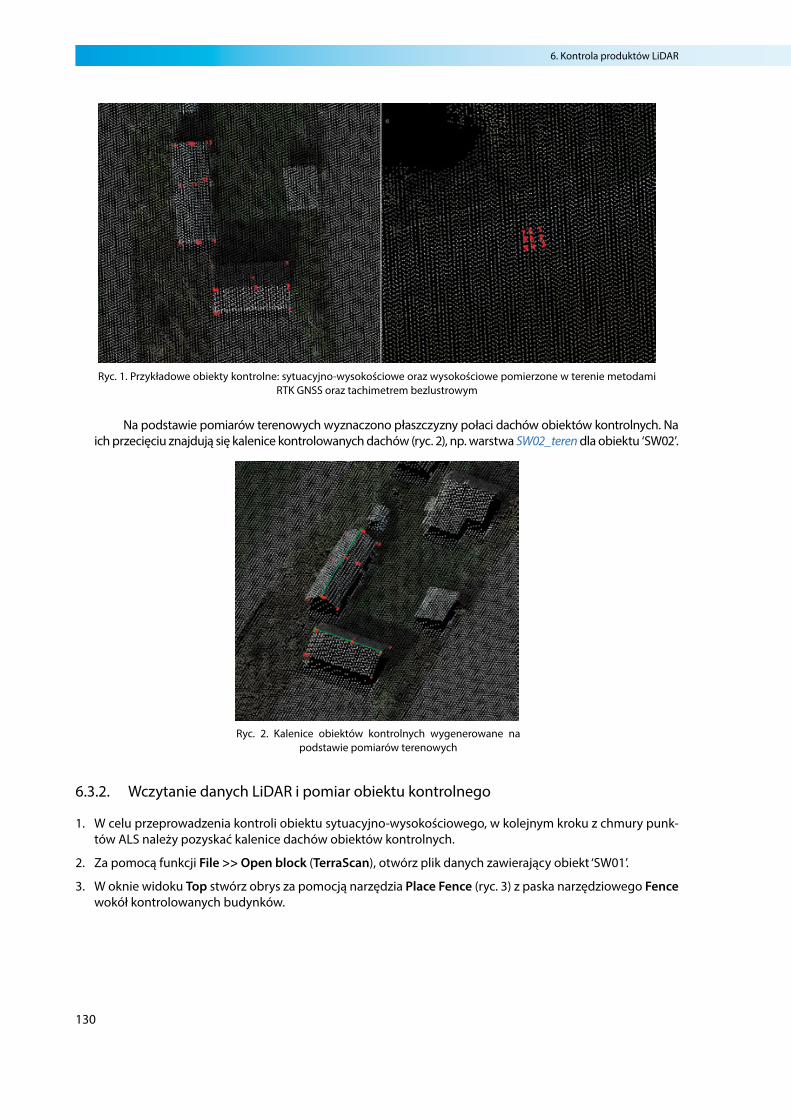
6. Kontrola produktów LiDAR
130
Na podstawie pomiarów terenowych wyznaczono płaszczyzny połaci dachów obiektów kontrolnych. Na ich przecięciu znajdują się kalenice kontrolowanych dachów (ryc. 2), np. warstwa SW02_teren dla obiektu ‘SW02’.
6.3.2. Wczytanie danych LiDAR i pomiar obiektu kontrolnego
1. W celu przeprowadzenia kontroli obiektu sytuacyjno-wysokościowego, w kolejnym kroku z chmury punk-tów ALS należy pozyskać kalenice dachów obiektów kontrolnych.
2. Za pomocą funkcji File >> Open block (TerraScan), otwórz plik danych zawierający obiekt ‘SW01’.
3. W oknie widoku Top stwórz obrys za pomocją narzędzia Place Fence (ryc. 3) z paska narzędziowego Fence wokół kontrolowanych budynków.
Ryc. 1. Przykładowe obiekty kontrolne: sytuacyjno-wysokościowe oraz wysokościowe pomierzone w terenie metodami RTK GNSS oraz tachimetrem bezlustrowym
Ryc. 2. Kalenice obiektów kontrolnych wygenerowane na podstawie pomiarów terenowych

6.3. Kontrola georeferencji bezwzględnej danych LiDAR
131
4. Przeprowadź automatyczną wektoryzację budynków za pomocą narzędzia Vectorize Buildings z paska narzędziowego TerraScan, przyjmując odpowiednie parametry (ryc. 4). Zaznacz opcję Inside fence i po-twierdź przyciskiem OK.
5. Przy pomocy narzędzia Place SmartLine z paska narzędziowego Linear-Task (ryc. 5), na warstwie SW01_lidar (ustaw SW01_lidar jako warstwę aktywną w polu Active Level na pasku Attributes aplikacji Bentley Map PowerView) narysuj kalenice, snapując się do końców kalenic zwektoryzowanych modeli bu-dynków składających się na obiekt kontrolny ‘SW01’.
6. Pozyskane wektory kalenic zaznacz przy użyciu funkcji Element Selection z paska narzędziowego Selection, wyeksportuj do pliku tekstowego D:\Szkolenia_LiDAR\Cwiczenia\06_03_TERRA\SW01_lidar.txt przy użyciu narzędzia Export Coordinates (ryc. 6) oprogramowania Bentley Map PowerView i potwierdź przyciskiem Single.
Ryc. 3. Funkcja Fence programu Bentley Map PowerView
Ryc. 4. Okno dialogowe narzędzia Vectorize Buildings
Ryc. 5. Pasek narzędziowy Linear-Task z ikoną Place SmartLine

6. Kontrola produktów LiDAR
132
7. W kolejnym kroku, za pomocą File >> Open block (TerraScan) otwórz arkusz danych obejmujący obszar obiektu kontrolnego ‘W01’.
8. Przy użyciu funkcji Tools >> Output control report (ryc. 7) wygeneruj raport z porównania otrzymanego pliku tekstowego W01xyz.txt do chmury punktów ALS i zapisz go w folderze szkoleniowym za pomocą po-lecenia z menu File >> Save as text pod nazwą W01_lidar_raport.txt. Raport porównania zawiera wysokości punktów siatki obiektu kontrolnego wyinterpolowane z danych LiDAR. Wartości wysokości zapisywane są w kolumnie Laser Z wygenerowanego pliku tekstowego.
6.3.3. Generowanie raportu i ocena wyników
1. Ostatnim etapem ćwiczenia jest porównanie danych pozyskanych z chmury punktów LiDAR z danymi z po-miarów terenowych. W tym celu otwórz plik 06_03_TERRA.xls, a następnie uzupełnij brakujące dane dla obiektów ‘SW01’ i ‘W01’ oznaczone w arkuszu kolorem czerwonym. Dla obiektu ‘SW01’ wprowadź współ-rzędne zakończeń kalenic z pozyskanego pliku tekstowego SW01_lidar.txt. Współrzędne środka kalenic
Ryc. 6. Okno dialogowe narzędzia Export Coordinates
Ryc. 7. Okno funkcji Output control report

6.3. Kontrola georeferencji bezwzględnej danych LiDAR
133
zostaną obliczone automatycznie. Dla obiektu W01 wklej współrzędne Z (m) z kolumny Laser Z z raportu porównania W01_lidar_raport.txt. Dane dla pozostałych obiektów kontrolnych na potrzeby ćwiczeń zostały już wprowadzone do arkusza obliczeniowego.
2. Po wprowadzeniu brakujących danych zostają obliczone wartości błędów sytuacyjnego i wysokościowego dla kontrolowanych obiektów ‘SW01’ i ‘W01’. Sprawdź, czy nie przekraczają one dopuszczalnych wartości zdefiniowanych w specyfikacji projektu ISOK (tab. 1).
6.3.4. Podsumowanie
Ćwiczenie polegało na przeprowadzeniu kontroli georeferencji bezwzględnej Bloku danych LiDAR. Uczestnik szkolenia wczytał projekt zawierający dane z pomiaru terenowego i za pomocą narzędzi oprogramowania po-zyskał dane z chmury punktów ALS dla jednego z obiektów sytuacyjno-wysokościowych.Ostatnim etapem było wygenerowanie raportu z porównaniem obiektów kontrolnych pozyskanych z danych LiDAR i z pomiaru terenowego, a następnie ocena uzyskanych wyników.
Tabela. 1. Dopuszczalne wartości błędów średnich (m) w przypadku nadawania georeferencji bezwzględnej chmury punktów ALS w projekcie ISOK
Dokładność chmury punktów ALS Standard I
sytuacyjna (XY) mp ≤ 0,50 m
wysokościowa (H) mh ≤ 0,15 m
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................
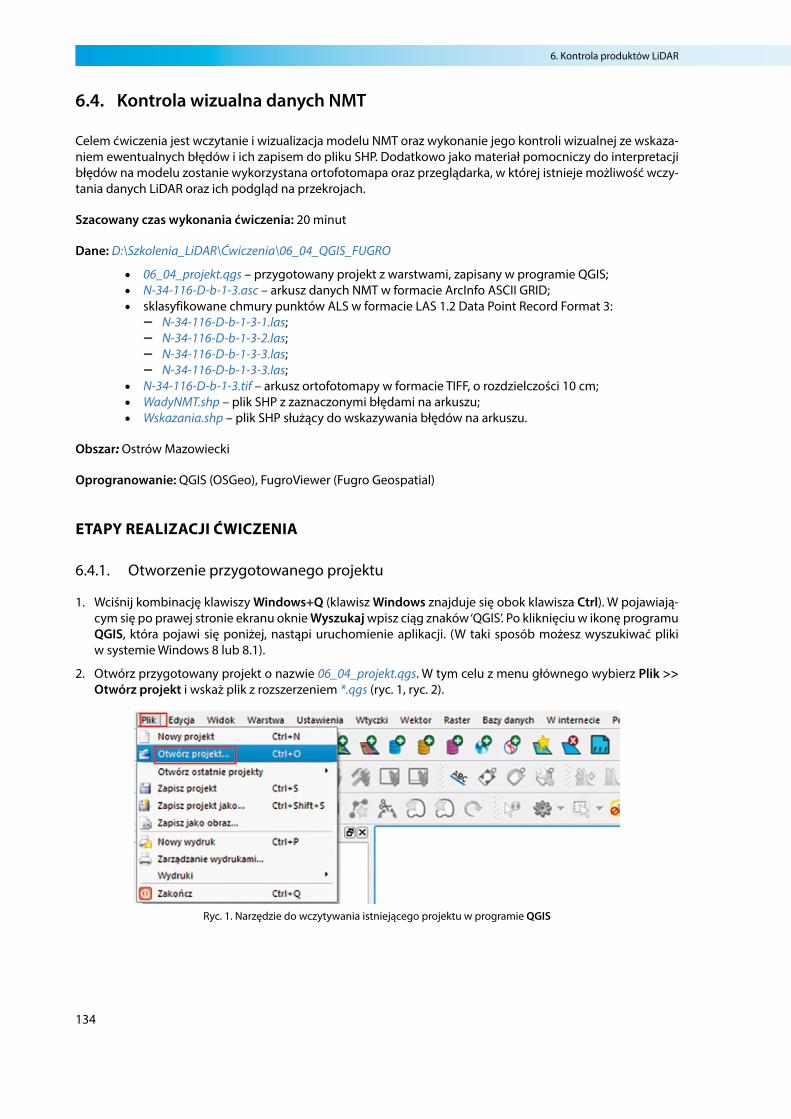
6. Kontrola produktów LiDAR
134
6.4. Kontrola wizualna danych NMT
Celem ćwiczenia jest wczytanie i wizualizacja modelu NMT oraz wykonanie jego kontroli wizualnej ze wskaza-niem ewentualnych błędów i ich zapisem do pliku SHP. Dodatkowo jako materiał pomocniczy do interpretacji błędów na modelu zostanie wykorzystana ortofotomapa oraz przeglądarka, w której istnieje możliwość wczy-tania danych LiDAR oraz ich podgląd na przekrojach.
Szacowany czas wykonania ćwiczenia: 20 minut
Dane: D:\Szkolenia_LiDAR\Ćwiczenia\06_04_QGIS_FUGRO
• 06_04_projekt.qgs – przygotowany projekt z warstwami, zapisany w programie QGIS;• N-34-116-D-b-1-3.asc – arkusz danych NMT w formacie ArcInfo ASCII GRID;• sklasyfikowane chmury punktów ALS w formacie LAS 1.2 Data Point Record Format 3:
− N-34-116-D-b-1-3-1.las; − N-34-116-D-b-1-3-2.las; − N-34-116-D-b-1-3-3.las; − N-34-116-D-b-1-3-3.las;
• N-34-116-D-b-1-3.tif – arkusz ortofotomapy w formacie TIFF, o rozdzielczości 10 cm;• WadyNMT.shp – plik SHP z zaznaczonymi błędami na arkuszu;• Wskazania.shp – plik SHP służący do wskazywania błędów na arkuszu.
Obszar: Ostrów Mazowiecki
Oprogranowanie: QGIS (OSGeo), FugroViewer (Fugro Geospatial)
ETAPY REALIZACJI ĆWICZENIA
6.4.1. Otworzenie przygotowanego projektu
1. Wciśnij kombinację klawiszy Windows+Q (klawisz Windows znajduje się obok klawisza Ctrl). W pojawiają-cym się po prawej stronie ekranu oknie Wyszukaj wpisz ciąg znaków ‘QGIS’. Po kliknięciu w ikonę programu QGIS, która pojawi się poniżej, nastąpi uruchomienie aplikacji. (W taki sposób możesz wyszukiwać pliki w systemie Windows 8 lub 8.1).
2. Otwórz przygotowany projekt o nazwie 06_04_projekt.qgs. W tym celu z menu głównego wybierz Plik >> Otwórz projekt i wskaż plik z rozszerzeniem *.qgs (ryc. 1, ryc. 2).
Ryc. 1. Narzędzie do wczytywania istniejącego projektu w programie QGIS
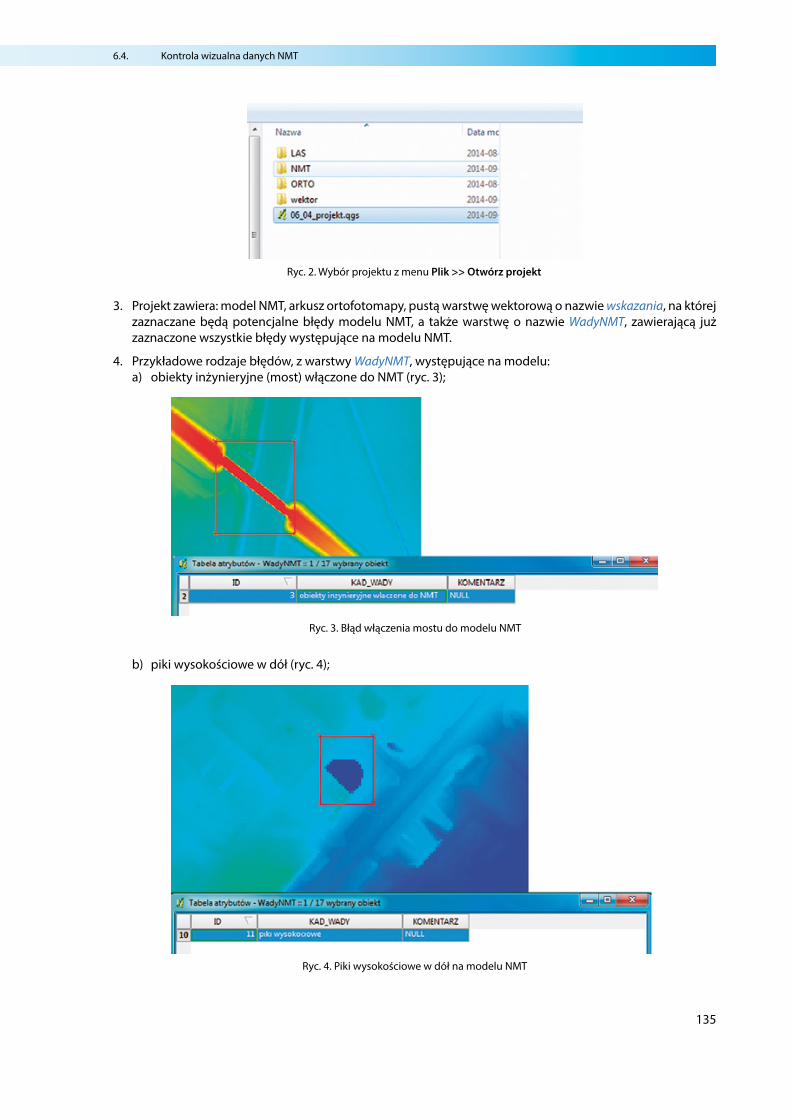
6.4. Kontrola wizualna danych NMT
135
3. Projekt zawiera: model NMT, arkusz ortofotomapy, pustą warstwę wektorową o nazwie wskazania, na której zaznaczane będą potencjalne błędy modelu NMT, a także warstwę o nazwie WadyNMT, zawierającą już zaznaczone wszystkie błędy występujące na modelu NMT.
4. Przykładowe rodzaje błędów, z warstwy WadyNMT, występujące na modelu:a) obiekty inżynieryjne (most) włączone do NMT (ryc. 3);
b) piki wysokościowe w dół (ryc. 4);
Ryc. 2. Wybór projektu z menu Plik >> Otwórz projekt
Ryc. 3. Błąd włączenia mostu do modelu NMT
Ryc. 4. Piki wysokościowe w dół na modelu NMT

6. Kontrola produktów LiDAR
136
c) obiekty tymczasowe (hałdy piachu) włączone do modelu NMT (ryc. 5).
5. Wyłącz warstwę WadyNMT poprzez odznaczenie krzyżyka w oknie wyświetlania warstw (ryc. 6).
6.4.2. Kontrola wizualna NMT
1. Przeglądnij model pod kątem możliwych do wystąpienia błędów, wykorzystując jako materiał pomocniczy podkład ortofotomapy.
2. Do poruszania się po modelu (powiększenie, pomniejszenie i przesuwanie) przydatny będzie pasek narzę-dziowy Zoom Tool (ryc. 7).
Polecenia z paska dostępne są również w menu Widok (ryc. 8).
Ryc. 5. Obiekty nietrwałe włączone do modelu NMT
Ryc. 6. Wyłączanie warstw w oknie wy-świetlania warstw mapy
Ryc. 7 Pasek narzędziowy Zoom Tool w programie QGIS

6.4. Kontrola wizualna danych NMT
137
6.4.3. Zaznaczenie ewentualnych błędów NMT i weryfikacja na danych LiDAR.
1. W przypadku wystąpienia błędu włącz edycję warstwy wektorowej o nazwie wskazania. W tym celu pod prawym przyciskiem myszy otwórz najpierw tabele atrybutów warstwy (ryc. 9), a następnie uruchom tryb edycji (ryc. 10).
Ryc. 8. Narzędzia do zmiany widoku w progra-mie QGIS
Ryc. 9. Polecenie otwarcia tabeli atrybutów warstwy w progra-mie QGIS

6. Kontrola produktów LiDAR
138
2. Narzędziem do tworzenia nowych obiektów (ryc. 11) zaznacz błąd NMT oraz nadaj atrybut w polu KAD_WADY (ryc. 12). Następnie poleceniem Save w tabeli atrybutów zapisz zmiany na warstwie wek-torowej (ryc. 13).
Ryc. 10. Uruchomienie trybu edycji programu QGIS
Ryc. 11. Narzędzie tworzenia nowych poli-gonów w programie QGIS
Ryc. 12. Przypisanie atrybutów nowo utworzonym poligonom w programie QGIS

6.4. Kontrola wizualna danych NMT
139
3. W przypadku wątpliwych miejsc, w przeglądarce FugroViewer można wczytać chmurę punktów, na pod-stawie której został wygenerowany model NMT, i dokonać pomocniczej weryfikacji danych.
4. Plik *.las otwórz poleceniem File >> Open LiDAR File(s) (ryc. 14). Następnie wybierz sposób wyświetlania chmury punktów (ryc. 15, ryc. 16).
5. Do przeglądania chmury można wykorzystać następujące narzędzia:• Zoom Tool służący do powiększania (lewy przycisk myszy) i pomniejszania (prawy przycisk myszy) ob-
szaru modelu (ryc. 17);
Ryc. 13. Zapisanie wprowadzonych zmian na warstwie wektorowej
Ryc. 14. Narzędzie do wczytywania danych w przeglądarce FugroViewer
Ryc. 15. Ustawienia wyświetlania chmury punktów w przeglądarce FugroViewer
Ryc. 16. Wybór klas włączonych do wyświetlania chmury punktów oraz palety jej wyświetlania

6. Kontrola produktów LiDAR
140
• Profile Tool służący do tworzenia przekroju: najpierw określa się długość i szerokość przekroju, po za-akceptowaniu prawym przyciskiem myszy w dodatkowym oknie pojawia się przekrój punktów tworzą-cych model (ryc. 18, ryc. 19).
• Open 3D View służący do uruchomienia dodatkowego widoku 3D w oddzielnym oknie (ryc. 20).
Po wywołaniu funkcji Open 3D View pojawia się okno (ryc. 21), w którym istnieje możliwość obracania modelu za pomocą lewego przycisku myszy.
Ryc. 17. Narzędzie Zoom Tool służące do powiększania i pomniejszania obszaru modelu w FugroViewer
Ryc. 18. Narzędzie Profile Tool służące do tworzenia przekroju na modelu
Ryc. 19. Widok przekroju i widok górny chmury punktów wczytanej do programu FugroViewer
Ryc. 20. Narzędzie Open 3D View wywołujące widok 3D

6.4. Kontrola wizualna danych NMT
141
6.4.4. Podsumowanie
Ćwiczenie polegało na wizualnej ocenie numerycznego modelu terenu pod kątem możliwych do wystąpienia wad produktu.
Do wczytania przygotowanego projektu z warstwami oraz wizualnej kontroli modelu wykorzystano pro-gram GIS. Dokonano w nim również zaznaczeń błędów i ich zapisu do pliku SHP. Następnie w ćwiczeniu wczy-tano chmurę punktów do przeglądarki i za pomocą podstawowych narzędzi do wyświetlania i przeglądania chmury dokonano weryfikacji wątpliwych miejsc na modelu.
Ryc. 21. Widok 3D w programie FugroViewer
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

142
7. Udostępnienie danych
7.1. Symulacja przeprowadzenia zamówienia na numeryczne dane wysokościowe dostępne w państwowym zasobie geodezyjnym i kartograficznym
Celem ćwiczenia jest poznanie procedury złożenia wniosku o udostępnienie produktów LiDAR z państwowego zasobu geodezyjnego i kartograficznego (pzgik). Podczas wykonywania ćwiczenia uczestnik szkolenia zdobę-dzie umiejętności praktycznego korzystania ze skorowidzów i kalkulatora CODGiK, a także wyboru i wypełnienia odpowiedniego wniosku celem zamówienia danych. Ćwiczenie polega na przygotowaniu zamówienia chmury punktów LiDAR z obszaru woj. mazowieckiego, powiatu m. st. Warszawa, dzielnicy Ochota.
Szacowany czas wykonania ćwiczenia: 20 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\07_01_CODGiK
• C.pdf – wniosek o udostępnienie materiałów centralnego zasobu geodezyjnego i kartograficznego;• C8.pdf – uszczegółowienie wniosku.
Obszar: Warszawa
Oprogramowanie: Adobe Reader, dowolna przeglądarka internetowa
ETAPY REALIZACJI ĆWICZENIA
7.1.1. Wykorzystanie skorowidzów CODGiK
1. Pierwszym krokiem w procesie zamawiania danych dostępnych w pzgik jest najczęściej sprawdzenie do-stępności i wybór odpowiedniego arkusza (godła) danych na stronie skorowidzów CODGiK (http://www.codgik.gov.pl/index.php/skorowidze.html). Otwórz wskazaną stronę w przeglądarce internetowej. W przy-padku składania wniosku o udostępnienie danych drogą elektroniczną zalecane jest przesłanie pliku wek-torowego (shapefile) określającego granice obszaru w układzie PL-1992 lub PL-2000. Jednak w sytuacji, kiedy nie dysponujemy plikiem wektorowym bądź zamawiamy dane drogą pisemną, można skorzystać ze skorowidzów w celu sporządzenia listy arkuszy (godeł).
2. Przejdź do zakładki Numeryczne Dane Wysokościowe (ryc. 1), aby otworzyć skorowidze dla chmur punktów ALS.

7.1. Symulacja przeprowadzenia zamówienia na numeryczne dane wysokościowe dostępne w państwowym zasobie geodezyjnym i kartograficznym
143
3. Na stronie skorowidzów zdefiniuj odpowiednią warstwę w panelu znajdującym się po lewej stronie i wy-bierz format danych LAS (ryc. 2).
4. Przejdź do zakładki Znajdź i wybierz kolejno: województwo = mazowieckie, powiat = m. st. Warszawa, gmina = Ochota (dzielnica).
5. W celu identyfikacji konkretnego arkusza danych LiDAR wybierz zakładkę Identyfikuj. Po kliknięciu lewym przyciskiem myszy w wybrany arkusz, wyświetlone zostaną jego metadane (ryc. 3).
6. Zanotuj wybrane godło modułu archiwizacji danych LiDAR. Szacowana pojemność pliku to ok. 200 MB.
Ryc. 1. Wybór zakładki Numeryczne dane Wysokościowe w zakładce Skorowidze na stronie CODGiK
Ryc. 2. Wybór odpowiedniej warstwy danych (Dane pomiarowe w formacie LAS) na stronie
Skorowidze
Ryc. 3. Wybór arkusza danych LiDAR na stronie Skorowidze (CODGiK)

7. Udostępnienie danych
144
7.1.2. Skorzystanie z kalkulatora opłat do wstępnego oszacowania opłaty udostępnienia materiałów dla wskazanego obszaru na cele własne
1. Wysokość opłat oraz sposób jej naliczenia za udostępnianie danych reguluje Prawo geodezyjne i karto-graficzne z dnia 17 maja 1989 r. (Dz.U. z 2010 r. Nr 193 poz. 1287 z późniejszymi zmianami). Korzystając z Kalkulatora opłat CODGiK (dostępnego na stronie http://www.codgik.gov.pl/kalkulator_codgik.html), istnieje możliwość symulacji kosztów udostępnienia materiałów z pzgik. Kalkulator opłat CODGiK nie uwzględnia kosztów elektronicznych nośników danych oraz opłat za wysyłanie materiałów zasobu.
2. W Kalkulatorze opłat ustaw następujące dane (ryc. 4):• Zasób: Centralny Zasób Geodezyjny i Kartograficzny;• Zbiór danych: Baza danych zobrazowań lotniczych i satelitarnych oraz ortofotomapy i numerycznego
modelu terenu;• Dane (parametry materiału zasobu): błąd średni < 0,8 m;• Zakres uprawnień do przetwarzania materiałów zasobu: potrzeby własne (CI=1,0; dotyczy potrzeb wła-
snych niezwiązanych z działalnością gospodarczą, bez prawa publikacji w sieci Internet);• Sposób udostępniania materiałów zasobu: inne niż usługi sieciowe (interesuje nas postać elektroniczna
za pośrednictwem serwera FTP);• W przypadku obliczania kosztów danych LiDAR, wymagane jest podanie wielkości zamawianej po-
wierzchni w km2. Pliki zawierające chmurę punktów LiDAR w standardzie II odpowiadają zasięgom arkuszy w układzie współrzędnych płaskich prostokątnych PL-1992 w skali 1:1 250, czyli obszarowi ok. 0,5 km × 0,5 km = 0,25 km2. Wpisz wartość 0,25.
3. Kliknij Oblicz. Kalkulator automatycznie zmieni wartość 0,25 km2 na wartość 1 km2, która stanowi minimal-ną powierzchnię przeliczeniową. Koszt udostępnienia danych został oszacowany na 4,00 zł. W przypadku, gdy opłata związana z realizacją wniosku dotyczącego udostępnienia zbiorów danych w postaci elektro-nicznej jest mniejsza od 30 zł, pobiera się opłatę w wysokości 30 zł.
7.1.3. Zapoznanie z formularzami wniosków na udostępnianie danych i wnioskami uszczegóławiającymi
1. Zgodnie z § 20 ust. 1 Rozporządzenia Ministra Administracji i Cyfryzacji z dnia 5 września 2013 r. w sprawie organizacji i trybu prowadzenia państwowego zasobu geodezyjnego i kartograficznego (Dz.U. z 2013 r., poz. 1183), wniosek o udostępnienie danych można złożyć w formie:
Ryc. 4. Obliczanie kosztów zamówienia przy użyciu Kalkulatora opłat CODGiK

7.1. Symulacja przeprowadzenia zamówienia na numeryczne dane wysokościowe dostępne w państwowym zasobie geodezyjnym i kartograficznym
145
• pisemnej (pocztą),• dokumentu elektronicznego opatrzonego podpisem elektronicznym,• dokumentu elektronicznego opatrzonego podpisem elektronicznym potwierdzonym profilem zaufa-
nym ePUAP.
Szczegółowe informacje na ten temat można znaleźć pod adresem:http://www.codgik.gov.pl/index.php/obsluga-klienta/sposob-zalatwiania-spraw.html
2. Przejdź do zakładki Obsługa Klienta/Formularze, aby pobrać odpowiedni wniosek i wybierz pozycję Wnioski:http://www.codgik.gov.pl/index.php/obsluga-klienta/formularze/wnioski.html
W przypadku zamawiania chmury punktów ALS, wymagane są dwa dokumenty:• Wniosek o udostępnienie materiałów Centralnego Zasobu Geodezyjnego i Kartograficznego (C.pdf),• Uszczegółowienie wniosku o udostępnienie NMT lub NMPT (C8.pdf).
3. W ogólnym wniosku o udostępnienie danych (C.pdf), oprócz danych osobowych należy zdefiniować przed-miot wniosku, parametry charakteryzujące zakres uprawnień do przetwarzania materiałów oraz formę przekazania i sposób odbioru materiałów. Zapoznaj się z przykładowo wypełnionym wnioskiem, który znajduje się w katalogu szkoleniowym.
4. W uszczegółowieniu wniosku (C8.pdf):• wybierz zbiór danych pomiarowych NMT (ryc. 5).
• zdefiniuj obszar objęty wnioskiem o udostępnienie materiałów (ryc. 6). W przypadku niniejszego ćwi-czenia należy zaznaczyć „wykaz godeł arkuszy mapy”. Wpisz wybrane godło arkusza.
5. Po wypełnieniu wniosku należy zapisać zmiany w plikach PDF i przesłać do CODGiK drogą elektroniczną (e-mail, skrzynka podawcza na portalu ePUAP) lub wydrukować, podpisać i przesłać drogą pocztową bądź złożyć osobiście.
6. W folderze z danymi do ćwiczenia (D:\Szkolenia_LiDAR\Cwiczenia\07_01_CODGiK) znajduje się wypełniony wniosek wraz z uszczegółowieniem. Zapoznaj się z nim.
7.1.4. Podsumowanie
Ćwiczenie polegało na poznaniu procedury złożenia wniosku o udostepnienie numerycznych danych wyso-kościowych dostępnych w pzgik. Wykorzystano w tym celu strony internetowe CODGiK ze skorowidzami oraz kalkulatorem opłat, a także odpowiednie wnioski o udostępnienie danych.
Ryc. 5. Uszczegółowienie wniosku o udostępnienie zbioru danych pomiarowych NMT
Ryc. 6. Wybór sposobu identyfikacji obszaru objętego zamówieniem

146
8. Narzędzia obsługi produktów LiDAR
8.1. Wykorzystanie baz danych PostgreSQL do przechowywania dużych zbiorów produktów LiDAR
Podczas realizacji ćwiczenia przekazane zostaną praktyczne umiejętności z zakresu wykorzystywania baz danych oraz informacje z zakresu eksportu danych z istniejącego projektu na serwerze PostgreSQL.
Szacowany czas wykonania ćwiczenia: 30 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\08_01_LiS
• 08_01_LiS – projekt programu LiS;• Nowy_Sacz – obrys obszaru, który zostanie wyeksportowany z bazy danych;• N-33-91-C-c-3-1-2-2 – sklasyfikowana chmura punktów ALS w formacie LAS 1.2 Data Point Record
Format 3.
Obszar: Klępino, Nowy Sącz
Oprogramowanie: SAGA, LiS (LASERDATA)
ETAPY REALIZACJI ĆWICZENIA
8.1.1. Uruchomienie programu LiS
1. Program LiS funkcjonuje m.in. jako nakładka na SAGA, toteż aby go uruchomić, należy wcześniej urucho-mić program SAGA.
2. Uruchom program SAGA z nakładką LiS, znajdujący się w folderze C:\Program Files\Laserdata\LIS\saga.gui.
8.1.2. Eksport danych z serwera PostgreSQL
1. PostgreSQL, często nazywany Postgres, to serwer bazodanowy, który pozwala przechowywać duże zbiory danych. Takie zbiory przechowywane są w samodzielnie przygotowanych projektach.
2. Po otwarciu oprogramowania wyeksportuj dane z projektu, który znajduje się w bazie danych PostgreSQL. Skorzystaj z modułu LIS Server Export WS >> Export LiDAR Points. W oknie dialogowym wskaż projekt (ryc. 1; nr 1) Nowy_Sacz_ISOK (2014-09-22). Następnie wskaż do eksportu atrybut klasyfikacji idclass w ru-bryce Echo Attributes (ryc. 1; nr 2).

8.1. Wykorzystanie baz danych PostgreSQL do przechowywania dużych zbiorów produktów LiDAR
147
3. W celu wyeksportowania tylko wybranego fragmentu z projektu, stwórz obrys obszaru w formacie SHP. W oknie dialogowym Export LiDAR Points wskaż wcześniej przygotowany obrys Nowy_Sacz, znajdujący się w oknie zawartości (Area of interest; ryc. 1; nr 3). Następnie zaznacz chmurę punktów jako element eksportowany, w rubryce Export as … >> Point Cloud (ryc. 1; nr 4).
4. Zaakceptuj polecenie klikając Okay.
5. W wyniku eksportu otrzymujemy chmurę punktów o nazwie Nowy_Sacz_ISOK_point_eksport, zawierającą informacje o klasyfikacji (idclass).
6. Zwizualizuj chmurę punktów w oknie widoku za pomocą polecenia Add to map (ryc. 2).
Ryc. 1. Okno dialogowe pozwalające na eksport danych z projektu PostgreSQL
1
2
3
4
Ryc. 2. Dodanie wyeksportowanej chmury punktów do okna widoku

8. Narzędzia obsługi produktów LiDAR
148
7. Przybliż się do wybranego fragmentu, aby zobaczyć chmurę punktów (ryc. 3).
8.1.3. Eksport NMPT z serwera PostgreSQL
1. Eksport NMT z serwera odbywa się poprzez użycie narzędzia LIS Server Export WS >> Export LIDAR Points to Grid. W oknie dialogowym należy zdefiniować projekt, z którego zostaną pobrane dane. W tym celu w rubryce QB LIDAR Point Project wejdź w menu i w oknie dialogowym QB LIDAR Point Project wskaż projekt (ryc. 4; nr 1) Nowy_Sacz_ISOK (2014-09-22). Zatwierdź polecenie poprzez naciśnięcie Okay.
2. Następnie powracając do okna dialogowego Export LIDAR Points to Grid, w rubryce Attribute wskaż pa-rametr wysokości (z), który zostanie wyeksportowany z serwera. W rubryce Aggregation (ryc. 4; nr 2) wskaż maksymalną wysokości (max z).
3. Wskaż obrys, taki sam jak przy eksporcie chmury punktów: Nowy_Sacz (ryc. 4; nr 3).
4. Zatwierdź zadanie Okay.
Ryc. 3. Wyeksportowana chmura punktów
Ryc. 4. Okno dialogowe do eksportu NMPT
1
2
3

8.1. Wykorzystanie baz danych PostgreSQL do przechowywania dużych zbiorów produktów LiDAR
149
8.1.4. Utworzenie projektu na serwerze PostgreSQL
1. W celu utworzenia nowego projektu na serwerze PostgreSQL, w pierwszej kolejności zaimportuj do pro-gramu dane, które zostaną umieszczone w projekcie: N-33-91-C-c-3-1-2-2 za pomocą polecenia Import/Eksport – LAS >> Import LAS Files.
2. Następnie zastosuj moduł Get Extent of LAS files as Shapes (ryc. 5), aby zamienić chmurę punktów na plik SHP. W oknie dialogowym wskaż ścieżkę dostępu do chmury punktów N-33-91-C-c-3-1-2-2. Zatwierdź pole-cenie, klikając Okay.
3. W kolejnym kroku sprawdź gęstość chmury punktów (Point Density; ryc. 6). W celu wyświetlenia tabeli, wskaż w oknie zawartości chmurę punktów, a następnie prawym klawiszem myszy wskaż polecenie Attributes >> Table.
4. Utwórz nowy projekt w bazie PostgreSQL, posługując się modułem LIS Server Management WS >> New LiDAR Point Project (ryc. 7).
5. W rubryce LIDAR Point Project Name wpisz nazwę projektu: Klepino, poniżej w rubryce LIDAR Point Project Date wpisz datę utworzenia projektu. W rubryce Estimated Point Density wskaż sprawdzoną wcześniej
Ryc. 5. Zamiana chmury punktów na plik SHP
Ryc. 6. Sprawdzanie gęstości punktów
Ryc. 7. Utworzenie nowego projektu w bazie Postgres

8. Narzędzia obsługi produktów LiDAR
150
gęstość chmury punktów (ryc. 6). Następnie wskaż atrybuty dla projektu Return Number (odbicie lasera) oraz intensywność (Intensity). Zatwierdź poleceniem Okay.
6. W kolejnym kroku pojawi się okno dialogowe Configure Echo Attributes. Służy ono zdefiniowaniu para-metrów, które każdorazowo mogą zostać zaimportowane do projektu z pliku LAS lub ASCII. Wskaż trzy atrybuty: intensywność, klasyfikacja, numer echa. W każdym z atrybutów wskaż typ atrybutu jako boolean. Jest to typ odczytywalny przez bazę Postgres. Następnie zatwierdź poleceniem Okay.
7. W oknie wiadomości pojawi się informacja o utworzeniu projektu.
8.1.5. Import danych do utworzonego projektu
1. Utworzony projekt jest pusty; aby zaimportować do niego dane skorzystaj z polecenia LIS Server Import WS >> Import LIDAR Points from LAS File.
2. Wskaż w rubryce LIDAR Point Project nazwę utworzonego projektu. W przypadku, gdy projekt się nie pojawi, wybierz UPDATE, a następnie ponownie rozwiń listę i wskaż projekt Klepino (data utworzenia projektu). Następnie zaznacz rubryki Update Database (informacja o aktualizacji projektu) oraz Transaction (blokowanie dostępu do baz danych). Wskaż ścieżkę dostępu do pliku LAS, który zostanie zaimportowany. Zatwierdź poleceniem Okay.
3. Plik został załadowany do projektu. W celu sprawdzenia, wyeksportuj fragment pliku postępując według kroków z podrozdziału 8.1.2. Eksport danych z serwera PostgreSQL.
8.1.6. Podsumowanie
W ćwiczeniu wyeksportowano chmurę punktów oraz numeryczny model pokrycia terenu z serwera Postgre-SQL. Następnie na serwerze PostgreSQL został utworzony nowy projekt o nazwie Klepino. W kolejnym kroku do nowo utworzonego projektu zaimportowano dane – chmurę punktów z obszaru Klępina.
Zaletą z korzystania z bazy PostgreSQL jest jej nieograniczona pojemność, co umożliwia przechowywanie dużej ilości danych LiDAR. Ponadto utworzenie bazy umożliwia udostępnienie danych z jednego źródła wielu użytkownikom. Bazy PostgreSQL to również możliwość eskportowania tylko wybranych fragmentów danych, dzięki czemu użytkownik nie musi martwić się o przechowywanie całego zbioru. Ponadto umieszczenie chmur punktów w bazie PostgreSQL pozwala na wykonanie w locie modeli wysokościowych.
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

151
9. Zastosowania produktów LiDAR oraz przyszłość
9.1. Generowanie obrysów budynków w celu weryfikacji aktualności warstwy BDOT10k
Celem ćwiczenia jest weryfikacja aktualności warstwy geometrycznej budynków z bazy BDOT10k, m.in. na podstawie produktów pochodnych danych LiDAR. Na podstawie chmury punktów ALS wygenerowane zosta-ną obrysy punktów zaklasyfikowanych do klasy budynki. Obrysy te posłużą do porównania względem innych dostępnych danych, takich jak: BDOT10k, ortofotomapa i numeryczny model pokrycia terenu.
Szacowany czas wykonania ćwiczenia: 25 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\09_01_LP360
• task_obrysy_budynkow.xml – przygotowane zadanie do pracy na chmurze punktów;• hillshade_3-2.tif–cieniowany model pokrycia terenu;• N-33-91-C-c-3-2.asc – numeryczny model pokrycia terenu w formacie ArcInfo ASCII GRID, o roz-
dzielczości 0,5 m;• N-33-91-C-c-3-2.tif – ortofotomapa w formacie TIFF, o rozdzielczości 10 cm;• OT_BUBD_A.shp – plik z wektorami budynków pochodzący z BDOT10k (format SHP);• N-33-91-C-c-3-2-1-3.las – sklasyfikowana chmura punktów ALS w formacie LAS 1.2 Data Point
Record Format 3.
Obszar: Klępino (powiat stargardzki, województwo zachodniopomorskie)
Oprogramowanie: LP360, ArcMap (Esri)
ETAPY REALIZACJI ĆWICZENIA
9.1.1. Generowanie obrysów budynków na podstawie chmury punktów LiDAR
1. Otwórz przygotowany projekt 09_01_LP360.mxd z załadowanymi danymi. W tabeli zawartości znajduje się chmura punktów z obszaru Klępina N-33-91-C-c-3-2-1-3.las wraz z NMPT N-33-91-C-c-3-2.asc i ortofotomapą N-33-91-C-c-3-2.tif. Ponadto w tabeli zawartości znajduje się warstwa BDOT10k budynków OT_BUBD_A.shp, zdefiniowane zadanie do wygenerowania obrysów budynków oraz przygotowany, wygenerowany na pod-stawie NMPT, cieniowany model pokrycia terenu hillshade_3-2.tif.
2. W celu wygenerowania obrysów budynków (ryc.1), za pomocą funkcji Table of Contents >> Point Cloud Task >> Import Task(s) wczytaj do oprogramowania zdefiniowane zadanie task_obrysy_budynkow.xml znajdujące się w folderze ćwiczeniowym.

9. Zastosowania produktów LiDAR oraz przyszłość
152
3. W tabeli zawartości pojawi się zdefiniowane zadanie do wykonania obrysów budynków (ryc. 2). We wcze-śniej zdefiniowanym zadaniu określone zostały parametry generowania obrysów chmury punktów na podstawie klasy budynki. Rycina 2 zawiera parametry pozwalające na grupowanie punktów jednej klasy w grupy poprzez 1 m ruchome okno Trace Window oraz ruchome okno Grow Window łączące grupy w coraz większe podzbiory. Ponadto generowanie obrysów może być ograniczone o zdefiniowanie para-metru powierzchni najmniejszego obiektu wektoryzowanego – Minimum Area = 1 m2. Istotnym parame-trem generowania obrysów jest wartość kąta interpretowanego jako kąt prosty – Squaring Angle = 20°.
Ryc. 1. Zaimportowanie nowego za-dania do pracy na chmurze punktów
Ryc. 2. Definiowanie parametrów dla zadania na chmurze punktów

9.1. Generowanie obrysów budynków w celu weryfikacji aktualności warstwy BDOT10k
153
4. Zdefiniuj ścieżkę zapisu pliku wynikowego i nadaj nazwę obrysy_budynkow.shp. W celu wykonania zadania dla projektu, naciśnij polecenie Apply.
5. Na pasku narzędziowym LP360 Point Cloud Tasks wskaż polecenie Execute Task for a Project.
6. Wynikiem zastosowania zadania są dwa pliki: obrysy_budynkow.shp, który stanowi dokładny obrys chmury punktów oraz obrysy_budynkow.sqr.shp, będący skwadratyzowanym obrysem. Kwadratyzowanie polega na utworzeniu z plików zawerających obrysy klasy budynków, poligonów posiadajacyh kąty proste w na-rożnikach automatcznie zwektoryzawonych budynków.
7. Celem wyświetlenia tylko klasy budynków na chmurze punktów N-33-91-C-c-3-2-1-3.las, potrzebnej do późniejszych analiz, wejdź we właściwości wartwy poprzez kliknięcie prawym klawiszem myszy na chmu-rze punktów i wskazanie polecenia własciwości. Następnie w zakładce Display wskaż do wyświetlania tylko klasę budynków (ryc. 3).
8. Zmień sposób wyświetlania warstwy obrysy_budynkow.sqr.shp (ryc. 4), klikając dwukrotnie na legendzie warstwy i ustaw kolor obrysu (Outline Color) na niebieski (Ultra Blue) oraz szerokość obrysu (Outline Width) na 2. Kolor wypełnienia (Fit Color) ustaw na No Color. Zaakceptuj ustawienia.
Ryc. 3. Właściwości chmury punktów N-33-91-C-c-3-2-1-3.las

9. Zastosowania produktów LiDAR oraz przyszłość
154
9. W widoku mapy pojawi się chmura punktów klasy budynków wraz z wygenerowanymi obrysami (ryc. 5).
9.1.2. Porównanie wykonanych obrysów budynków z BDOT10k
1. Wyświetl warstwę BDOT10k o nazwie OT_BUBD_A.shp w tabeli zawartości (ryc. 6).
Ryc. 4. Nadanie parametrów wyświetlania dla warstwy obrysy_budynkow.sqr.shp
Ryc. 5. Wygenerowane obrysy budynków nałożone na klasę budynków chmury punktów
Ryc. 6. Wynik nałożenia warstwy BDOT10k (czerwony) na wygenerowane z chmury punktów obrysy
budynków (niebieski)

9.1. Generowanie obrysów budynków w celu weryfikacji aktualności warstwy BDOT10k
155
2. Porównaj zasięgi przestrzenne wektorów: BDOT10k oraz obrysów wygenerowanych z chmury punktów LiDAR. Nie wszystkie obrysy budynków wygenerowane pokrywają się z budynkami BDOT10k, ze względu na to, że obrysy budynków z warstwy BDOT10k są przyziemiami budynków, a na chmurze punktów zareje-strowane są krańce dachów wychodzące poza obszar przyziemi.
9.1.3. Porównanie wygenerowanych obrysów budynków z ortofotomapą
1. Obrysy budynków nałóż na ortofotomapę N-33-91-C-c-3-2.tif poprzez kliknięcie i przytrzymanie warstwy w tabeli zawartości oraz przesunięcie jej powyżej orotofmapy. Pozwoli to na porównanie wykonanej pracy ze zobrazowaniem lotniczym.
2. Na rycinie 7 widać, że wykonane podczas ćwiczenia obrysy pokrywają budynki na ortofotomapach.
3. Na ortofotomapie znajdują się również budynki, które nie zostały obrysowane na podstawie danych LiDAR (ryc. 8). Na rycinie 9, pod warstwą obrysów podświetlona została chmura punktów. Na zaznaczonym bu-dynku (pomarańczowy okrąg) nie ma żadnych punktów. Związane jest to z tym, że ortofotomapa została wykonana później niż chmura punktów, na której tego budynku nie ma.
Ryc. 7. Nałożenie warstwy obrysów budynków na ortofoto-mapę
Ryc. 8. Sprawdzenie aktualności danych

9. Zastosowania produktów LiDAR oraz przyszłość
156
9.1.4. Porównanie wygenerowanych obrysów budynków z numerycznym modelem pokrycia terenu (NMPT)
1. Na podstawie NMPT N-33-91-C-c-3-2.asc został wygenerowany cieniowany model rzeźby terenu hillshade_3-2.tif.
2. Następnie na cieniowany model rzeźby terenu nałożono warstwę NMPT N-33-91-C-c-3-2.asc. poprzez wskazanie warstwy i przeciągnięcie jej powyżej cieniowanego modelu rzeźby terenu. Wejdź we właści-wości NMPT, poprzez kliknięcie prawym klawiszem myszy i wskazanie polecenia właściwości, i w zakładce Display ustaw przeźroczystość (Transparency) na 40%.
3. W tabeli zawartości przeciągnij warstwę obrysy_budynkow.shp nad NMPT i cieniowany model rzeźby terenu (ryc. 9).
4. W oknie widoku mapy, obrysy budynków pokrywają się z miejscami występowania budynków na NMPT. Są jednak miejsca, gdzie na NMPT widoczny jest budynek, a obrys w tym miejscu nie został wygenerowany (ryc. 10).
5. Na rycinie 10 nałożono na NMPT dodatkowo klasę budynków chmury punktów. W zaznaczonym czerwo-nym okręgiem obszarze widać, że według NMPT i chmury punktów znajduje się w tym miejscu budynek. Nie został on jednak obrysowany ze względu na brak punktów lotniczego skanowania laserowego dla tego budynku. Brak punktów może być spowodowany np. ciemnym kolorem dachu. Kolor czarny pochłania dużą część promienia lasera.
Ryc. 9. Obrysy budynków nałożone na NMPT
Ryc. 10. Nałożenie na NMPT chmury punktów wraz z wyge-nerowanymi obrysami budynków

9.1. Generowanie obrysów budynków w celu weryfikacji aktualności warstwy BDOT10k
157
9.1.5. Podsumowanie
Podczas ćwiczenia wygenerowane zostały obrysy chmury punktów LiDAR, które zostały zaklasyfikowane do klasy budynki. Pozwoliło to na porównanie produktu pochodnego danych ALS z innymi materiałami referen-cyjnymi, jak BDOT10k, ortofotomapa, chmura punktów i NMPT. Na pokazanych przykładach widać, że wynik naszej pracy zależy od aktualności dostępnych danych, a także od technologii i od cech obszaru skanowanego, który może pochłonąć część wiązki lasera.
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................

9. Zastosowania produktów LiDAR oraz przyszłość
158
9.2. Detekcja pojedynczych drzew – określenie podstawowych parametrów drzew
Celem ćwiczenia jest wygenerowanie produktów pochodnych z danych ALS – pojedynczych drzew, w oparciu o parametry wybrane przez użytkownika. Specjalistyczne programy umożliwiają generowanie drzew wraz z ich atrybutami, takimi jak położenie (lokalizacja), wysokość oraz rozpiętość korony. Utworzone obiekty można za-pisać w formacie CSV oraz SHP. W zależności od wybranego formatu zapisu danych, drzewa zostaną zapisane z inną listą swoich parametrów.
Szacowany czas wykonania ćwiczenia: 25 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\09_02_ENVI
• N-33-91-C-c-3-1-2-4.las – chmura punktów ALS w formacie LAS 1.2 Data Point Record Format 3;• N-33-91-C-c-3-1-2-4.ini – projekt w formacie ENVI LiDAR.
Obszar: Klępino (powiat stargardzki, województwo zachodniopomorskie)
Oprogramowanie: ENVI LiDAR
ETAPY REALIZACJI ĆWICZENIA
9.2.1. Uruchomienie oprogramowania ENVI LiDAR i wczytanie projektu
1. Otwórz oprogramowanie ENVI LiDAR.
2. Z głównego menu ENVI LiDAR wybierz zakładkę File i polecenie Open. W wyświetlonym oknie wskaż ścieżkę do folderu z danymi: D:\Szkolenia_LiDAR\Cwiczenia\09_02_ENVI\N-33-91-C-c-3-1-2-4, a następ-nie wybierz plik N-33-91-C-c-3-1-2-4.ini i potwierdź Otwórz, aby otworzyć projekt. Projekt zawiera plik N-33-91-C-c-3-1-2-4.las.
9.2.2. Wybór parametrów generowania drzew
1. W celu wygenerowania pojedynczych drzew w oprogramowaniu ENVI LiDAR ustaw odpowiednie para-metry, takie jak np. minimalna i maksymalna wysokość drzewa oraz minimalna i maksymalna rozpiętość korony drzewa. Z głównego paska menu ENVI LiDAR wybierz zakładkę Process >> Process Data.
2. W oknie Project properties w zakładce Outputs wskaż produkty, które zostaną wygenerowane. W sekcji Products File Names and Formats na liście wszystkich dostępnych produktów zaznacz jedynie Produce Trees.
3. W polu Vector File Name wpisz nazwę dla wygenerowanych drzew lub zostaw domyślną nazwę bez zmiany. Z rozwijalnej listy formatów produktów wybierz SHP format (*.shp).
4. W sekcji Export Coordinate System upewnij się, że jest wybrany układ PL 1992/19. Jeśli nie jest wybrany, to wybierz opcję zaawansowane Advanced Projection i z rozwijalnej listy Projection wybierz Poland 1992/19, a następnie zatwierdź wybór klikając OK.
5. W oknie Project properties w zakładce Area Definition zaznacz cały obszar, który zostanie poddany prze-twarzaniu – z niego zostaną wygenerowane produkty.
6. W zakładce Production Parameters ustaw poszczególne parametry dla generowanych produktów. Poniż-sza tabela (tab. 1) przedstawia opis wszystkich dostępnych ustawień i parametrów dla drzew w sekcji Trees wraz z wartościami, które należy wpisać w celu ich identyfikacji i wygenerowania (ryc. 1).

9.2. Detekcja pojedynczych drzew – określenie podstawowych parametrów drzew
159
7. Po wpisaniu odpowiednich wartości, kliknij przycisk Start Processing.
8. Po zakończeniu przetwarzania punkty przedstawiające drzewa zostały pokolorowane na zielono (ryc. 2A) oraz zapisane w warstwie wektorowej i symbolizowane obiektami w postaci stożka (ryc. 2B). Utworzone warstwy zostaną wyświetlone w trybie QA – Quality Assurance. Tryb ten pozwala na edycję punktów oraz obiektów.
Tab. 1. Opis parametrów generowania drzew oraz wartości parametrów
Parametr Opis WartośćHeight (cm) Min: Minimalna wysokość generowanych drzew 130
Max: Maksymalna wysokość generowanych drzew 5000
Radius (cm) Min: Minimalny zasięg – rozpiętość korony drzewa 200
Max: Maksymalny zasięg korony drzewa 600
Ryc. 1. Ustawienie parametrów generowania drzew
Ryc. 2. Wygenerowane drzewa w postaci punktów (A) i wygenerowane drzewa w postaci wektorów (B)
A B

9. Zastosowania produktów LiDAR oraz przyszłość
160
9.2.3. Analiza i weryfikacja poprawności parametrów wygenerowanych drzew
1. W procesie przetwarzania danych została wygenerowana większość drzew. Po wykonanym procesie do-konaj analizy wizualnej stanu nowo utworzonych obiektów. Niektóre z drzew nie zostały wygenerowane, czego przyczyną może być zły dobór parametrów, np. ustawienie zbyt dużej lub zbyt małej wysokości lub rozpiętości. Drzewa, które reprezentowane są przez chmurę punktów ALS, ale nie zostały wygenerowa-ne, można dodać do grupy obiektów. Inny przypadek błędów w generowaniu drzew to nadanie drzewom błędnych parametrów wysokości lub rozpiętości. Wybrane obiekty należy poddać korekcji i przypisać im właściwe parametry.
2. W trybie edycji można dokonać zmian pojedynczych drzew. Edycji można wykonać w głównym oknie wy-świetlania oraz w oknie profilu poprzecznego. Jeśli wykonywana jest edycja w oknie głównym, to najlepiej wyświetlić jedynie warstwę wektorową drzew i ustawić widok izometryczny (ryc. 3) – to pomoże określić, które drzewa zostały wygenerowane poprawnie, a które błędnie lub też w ogóle nie zostały wygenerowa-ne.
3. W oknie podglądu przybliż się do obszaru w pierwszej kolumnie i trzecim wierszu od góry (ryc. 4). Na tym obszarze znajdują się drzewa, które nie zostały sklasyfikowane, więc w miejsca chmury punktów trzeba wstawić obiekty reprezentujące drzewa.
4. W celu wstawienia obiektu „drzewo”, kliknij dwukrotnie na wybrane drzewo i z dostępnych opcji wybierz New Correction, a następnie Tree – Set. W oknie Correction Item pojawią się dwa pola do wpisania para-metrów drzewa: Radius (m) – promień rozpiętości korony drzewa oraz Height (m) – wysokość drzewa.
5. Rozpiętość można pomierzyć korzystając z narzędzia mierzącego – Measurment Tool, znajdującego się na głównym pasku narzędzi ENVI LiDAR (ryc. 5).
Ryc. 3. Włączenie widoku izometrycznego
Ryc. 4. Zidentyfikowane drzewa.

9.2. Detekcja pojedynczych drzew – określenie podstawowych parametrów drzew
161
6. W celu sprawdzenia wysokości drzewa skorzystaj z narzędzia Filter Points By Height (ryc. 6).
7. W oknie filtracji punktów po wysokości zaznacz Filter Points, a następnie za pomocą suwaków ustaw mini-malną wysokość powyżej terenu i maksymalną wysokość dostosuj względem wybranego drzewa. Podczas dostosowywania maksymalnej wysokości, drzewa są wypełniane zielonymi punktami. Na poniższym przy-kładzie drzewa wypełnione są całkowicie punktami przy maksymalnej wysokości 5,30 m, więc tą wartość uznaj za wysokość drzewa (ryc. 7).
8. Po wykonaniu pomiarów należy wrócić do okna Correction Item, w którym zaznaczona jest opcja dodania nowego drzewa. Wypełnij pola parametrów drzewa wartościami pomierzonymi w poprzednich krokach (ryc. 8).
Ryc. 5. Narzędzie pomiarowe
Ryc. 6. Narzędzie filtracji punktów po wysokości
Ryc. 7. Narzędzie filtracji punktów po wysokości
Ryc. 8. Ustawienie wartości wysokości oraz rozpiętości nowego drzewa

9. Zastosowania produktów LiDAR oraz przyszłość
162
9. Dostosowując wysokość oraz rozpiętość drzewa można zauważyć, że zmienia się powierzchnia czerwone-go koła reprezentującego dane drzewo. Należy zauważyć, że zakres wysokości oraz rozpiętości ograniczony jest wartościami ustawionymi w procesie przetwarzania. Po wpisaniu odpowiednich wartości wybierz OK, aby zatwierdzić parametry. Nowe drzewo zostanie wstawione w wyznaczonej lokalizacji i zostanie zazna-czone zielonym kołem.
10. Kolejną możliwością korekcji parametrów drzewa jest edycja parametrów istniejącego drzewa. Na tym samym obszarze ortofotoskanu, co powyżej, zaznacz drzewo, które chcesz edytować (jedno z pięciu drzew rosnących w jednej linii). Kliknij na wybrane drzewo dwukrotnie i następnie wybierz opcję New Correction.
11. W celu edycji parametrów istniejącego drzewa, w oknie Correction Item wybierz opcję Tree – Edit, a na-stępnie wypełnij pola parametrów drzewa (wysokości oraz rozpiętości) właściwymi wartościami. Zaakcep-tuj zmianę wybierając OK (ryc. 9).
12. Ostatnią z dostępnych opcji korekcji drzewa jest jego usunięcie. Wybierz ponownie to samo drzewo, które było edytowane w poprzednim kroku. Kliknij dwukrotnie i następnie wybierz opcję New Correction, a w oknie Correction Item zaznacz opcję Tree – Remove i zatwierdź, klikając OK (ryc. 10).
Ryc. 9. Edycja parametrów istniejącego drzewa
Ryc. 10. Usuwanie drzewa

9.2. Detekcja pojedynczych drzew – określenie podstawowych parametrów drzew
163
13. Na ortofotoskanie, w miejscu gdzie znajdowało się drzewo, pojawi się czerwony trójkąt symbolizujący wprowadzoną zmianę w danym miejscu.
14. Po dokonaniu wszystkich korekcji wróć do sekcji Wybór parametrów generowania drzew (rozdział 9.2.2.) i wykonaj ponownie przetwarzanie danych. Podczas tego procesu zostaną wprowadzone i zatwierdzone wszystkie zmiany. Po tym etapie drzewa zostaną wyświetlone w trybie QA.
9.2.4. Podsumowanie
Ćwiczenie miało na celu detekcję oraz wygenerowanie drzew ze sklasyfikowanej chmury punktów ALS z załą-czeniem informacji o ich atrybutach takich jak:
• położenie (lokalizacja),• wysokość,• rozpiętość korony.
W drugiej części ćwiczenia użytkownik dokonał weryfikacji poprawności wygenerowanych drzew oraz ko-rekty związanej z usuwaniem, modyfikowaniem i wstawianiem obiektów.
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

9. Zastosowania produktów LiDAR oraz przyszłość
164
9.3. Analizy przestrzennego rozkładu nasłonecznienia na dachach budynków
Analiza nasłonecznienia pozwala użytkownikowi wyznaczyć potencjał solarny badanego obszaru. Ma to szcze-gólnie ważne znaczenie w przypadku projektowania kolektorów słonecznych na dachach budynków. Po wy-konaniu tego ćwiczenia uczestnik szkolenia LiDAR zdobędzie umiejętność generowania warstw rastrowych reprezentujących przestrzenny i czasowy rozkład potencjału energii słonecznej (nasłonecznienia), pod kątem mapowania obszarów przydatnych dla pozyskiwania alternatywnych źródeł energii (panele fotowoltaiczne, kolektory itp.).
Szacowany czas wykonania ćwiczenia: 45 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\10_01_SOLAR
• 10_01_SOLAR.mxd – plik projektu ArcGIS;• Hillshade.tif – warstwa cieniowanej rzeźby terenu NMPT;• Ortofotomapa.tif – warstwa cyfrowej ortofotomapy lotniczej;• NMPT.tif – numeryczny model pokrycia terenu (NMPT);• OT_BUBD.shp – warstwa budynków w formacie wektorowym.
Obszar: Klępino (powiat stargardzki, województwo zachodniopomorskie)
Oprogramowanie: ArcMap (Esri), ArcScene (Esri)
ETAPY REALIZACJI ĆWICZENIA
9.3.1. Wczytanie do oprogramowania modelu NMPT
1. W celu realizacji ćwiczenia uruchom (poprzez dwukrotne kliknięcie) projekt 10_01_SOLAR.mxd, znajdujący się w katalogu ćwiczenia.
2. Następnie wczytaj (Add data…) fragment numerycznego modelu pokrycia terenu (plik NMPT.tif) dla anali-zowanego obszaru.
9.3.2. Wektoryzacja kalenic w obszarze analiz
1. W celu zwiększenia dokładności analiz nasłonecznienia, warstwa wektorowa reprezentująca budynki zo-stanie dodatkowo uszczegółowiona poprzez wyznaczenie kalenic (linii na przecięciu połaci dachowych), zgodnie z poniższą ryciną (ryc. 1).
Ryc. 1. Konstrukcja dachu

9.3. Analizy przestrzennego rozkładu nasłonecznienia na dachach budynków
165
2. Wczytaj (Add data…) plik wektorowy (fragment bazy BDOT10k) zawierający obrysy budynków (OT_BUBD.shp), zmieniając (dwukrotne kliknięcie na nazwę warstwy a następnie zakładka Symbology) ich symbolikę na czerwony obrys, bez wypełnienia poligonu.
3. Jako warstwę podkładową do wektoryzacji ekranowej wczytaj (Add data…) plik Ortofotomapa.tif oraz Hillshade.tif. Kolejność ich wyświetlania w obszarze tabeli zawartości (Table Of Contents) musi być odpowiednio zachowana (ryc. 2).
4. Przed przystąpieniem do edycji budynków upewnij się, że pasek narzędziowy Editor jest włączony i wi-doczny w oknie programu (ryc. 3).
5. Wybierz przycisk z menu Editor >> Start Editing, aby uruchomić edycję warstwy wektorowej budynków. Podczas uruchamiania edycji, pojawia się okno wyboru dostępnych warstw. Z listy wybierz OT_BUBD_A (ryc. 4).
6. Jako podkład do wektoryzacji kalenic budynków wykorzystaj cieniowany model rzeźby terenu Hillshade, tak aby poprawnie wyznaczyć linię kalenicy. W przypadku wykorzystywania cyfrowej ortofotomapy lotni-czej, efekt przesunięcia radialnego występujący dla wysokich budynków (szczególnie odległych od punktu głównego zdjęcia), uniemożliwia precyzyjne wyznaczenie kalenicy.
7. Wybierz narzędzie Select Features (ryc. 5), znajdujące się na pasku narzędziowym Tools i zaznacz pierwszy z budynków. Następnie użyj narzędzia Cut Polygons Tool (ryc. 6) z paska narzędziowego Editor i narysuj linię prostą wzdłuż kalenicy, zakończ ją przy pomocy dwukliku.
Ryc. 2. Kolejność warstw w oknie Table Of Contents
Ryc. 3. Pasek narzędziowy Editor
Ryc. 4 Okno wyboru warstwy OT_BUBD_A do edycji

9. Zastosowania produktów LiDAR oraz przyszłość
166
8. W przypadku dachów o złożonej budowie, należy uszczegółowić ich geometrię zgodnie z poniższymi wskazówkami (ryc. 7).
9. Po zakończeniu wektoryzacji kalenic dla budynków w obszarze analizy nasłonecznienia, zakończ edycję (naciśnij na pasku Editor przycisku Editor >> Stop Edits). Po pojawieniu się okna z pytaniem o chęć zapisu zmian, zatwierdź wybór, naciskając Yes.
9.3.3. Analizy potencjału słonecznego
1. Obliczenie nasłonecznienia (zamiennie: potencjału energii promieniowania słonecznego) wykonywane jest w oparciu o analizy numerycznego modelu pokrycia terenu (NMPT). Funkcje związane z tego typu ana-lizami przestrzennymi znajdują się w zestawie narzędzi (ArcToolbox) z rozszerzenia Spatial Analyst Tools, w skrzynce narzędziowej Solar Radiation (ryc. 8).
Ryc. 5. Lokalizacja narzędzia Select Features
Ryc. 6. Lokalizacja narzędzia Cut Polygon Tools
Ryc. 7. Sposób wektoryzacji kalenic na dachach złożonych (z lewej pomocnicze obrazy cyfrowej ortofotomapy lotniczej, z prawej strony cieniowany model rzeźby
NMPT)
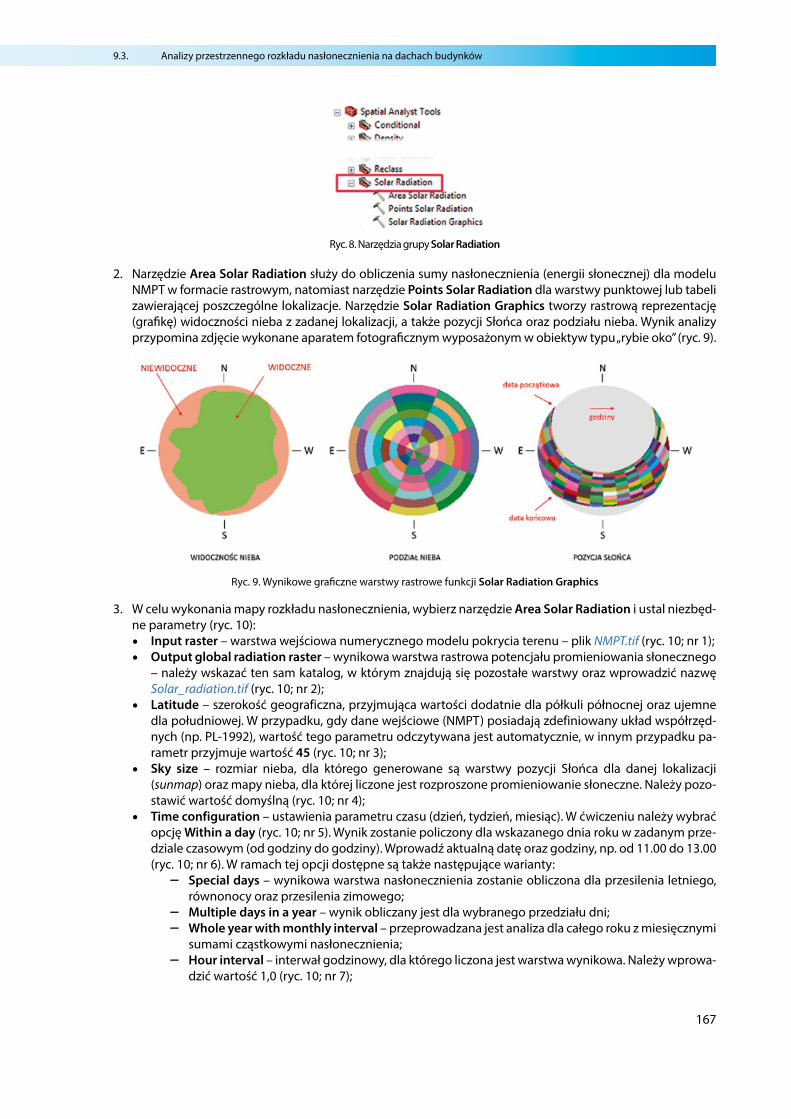
9.3. Analizy przestrzennego rozkładu nasłonecznienia na dachach budynków
167
2. Narzędzie Area Solar Radiation służy do obliczenia sumy nasłonecznienia (energii słonecznej) dla modelu NMPT w formacie rastrowym, natomiast narzędzie Points Solar Radiation dla warstwy punktowej lub tabeli zawierającej poszczególne lokalizacje. Narzędzie Solar Radiation Graphics tworzy rastrową reprezentację (grafikę) widoczności nieba z zadanej lokalizacji, a także pozycji Słońca oraz podziału nieba. Wynik analizy przypomina zdjęcie wykonane aparatem fotograficznym wyposażonym w obiektyw typu „rybie oko” (ryc. 9).
3. W celu wykonania mapy rozkładu nasłonecznienia, wybierz narzędzie Area Solar Radiation i ustal niezbęd-ne parametry (ryc. 10):• Input raster – warstwa wejściowa numerycznego modelu pokrycia terenu – plik NMPT.tif (ryc. 10; nr 1);• Output global radiation raster – wynikowa warstwa rastrowa potencjału promieniowania słonecznego
– należy wskazać ten sam katalog, w którym znajdują się pozostałe warstwy oraz wprowadzić nazwę Solar_radiation.tif (ryc. 10; nr 2);
• Latitude – szerokość geograficzna, przyjmująca wartości dodatnie dla półkuli północnej oraz ujemne dla południowej. W przypadku, gdy dane wejściowe (NMPT) posiadają zdefiniowany układ współrzęd-nych (np. PL-1992), wartość tego parametru odczytywana jest automatycznie, w innym przypadku pa-rametr przyjmuje wartość 45 (ryc. 10; nr 3);
• Sky size – rozmiar nieba, dla którego generowane są warstwy pozycji Słońca dla danej lokalizacji (sunmap) oraz mapy nieba, dla której liczone jest rozproszone promieniowanie słoneczne. Należy pozo-stawić wartość domyślną (ryc. 10; nr 4);
• Time configuration – ustawienia parametru czasu (dzień, tydzień, miesiąc). W ćwiczeniu należy wybrać opcję Within a day (ryc. 10; nr 5). Wynik zostanie policzony dla wskazanego dnia roku w zadanym prze-dziale czasowym (od godziny do godziny). Wprowadź aktualną datę oraz godziny, np. od 11.00 do 13.00 (ryc. 10; nr 6). W ramach tej opcji dostępne są także następujące warianty:
− Special days – wynikowa warstwa nasłonecznienia zostanie obliczona dla przesilenia letniego, równonocy oraz przesilenia zimowego;
− Multiple days in a year – wynik obliczany jest dla wybranego przedziału dni; − Whole year with monthly interval – przeprowadzana jest analiza dla całego roku z miesięcznymi
sumami cząstkowymi nasłonecznienia; − Hour interval – interwał godzinowy, dla którego liczona jest warstwa wynikowa. Należy wprowa-
dzić wartość 1,0 (ryc. 10; nr 7);
Ryc. 8. Narzędzia grupy Solar Radiation
Ryc. 9. Wynikowe graficzne warstwy rastrowe funkcji Solar Radiation Graphics

9. Zastosowania produktów LiDAR oraz przyszłość
168
• Create outputs for each interval pozwala na otrzymanie wyniku na dwa sposoby: − Aktywna opcja oznacza, że dla każdego momentu czasowego (w przypadku pokazanym na po-
niższej rycinie są to dwa momenty czasowe: godzina 12:00 oraz 13:00) – dla nich zostaną obliczo-ne osobne warstwy,
− Nieaktywna opcja oznacza, że dla wybranego interwału czasu policzona zostanie całkowita suma promieniowania słonecznego. W ćwiczeniu należy pozostawić właśnie tą opcję nie zaznaczoną (ryc. 10; nr 8).
4. W wyniku działania narzędzia programu Area Solar Radiation, wygenerowana zostaje warstwa rastrowa, zawierająca informację o całkowitej sumie nasłonecznienia (średnia moc promieniowania na jednostkę po-wierzchni) wyrażonej w Wh/m2 (ryc. 11).
5. Po wykonaniu obliczeń, warstwa wynikowa zostanie automatycznie dodana do okna programu ArcGIS oraz zwizualizowana zgodnie z powyższą ryciną (ryc. 11). Po zakończeniu projekt zapisz (File/Save).
1
23
45
6
78
Ryc. 10. Okno narzędzia Area Solar Radiation
Ryc. 11. Wynikowa warstwa insolacji nasłonecznienia Wh/m2

9.3. Analizy przestrzennego rozkładu nasłonecznienia na dachach budynków
169
9.3.4. Obliczanie wybranych statystyk dla warstwy nasłonecznienia
1. W ćwiczeniu zademonstrowana zostanie metoda przypisania informacji o nasłonecznieniu poszczególnym fragmentom dachów zmodyfikowanych obrysów budynków.
2. W oknie mapy w oknie Table of Contents, odznacz z wyświetlania wszystkie warstwy oprócz Solar_radiation.tif, a nad nią warstwę wektorową obrysów dachów OT_BUBD_A.shp (ryc. 12).
3. Spośród zestawów narzędziowych ArcToolbox wybierz grupę Spatial Analyst Tools, a następnie zbiór na-rzędzi Zonal oraz algorytm Zonal Statistics as Table (ryc. 13).
Narzędzie to należy do grupy tzw. analiz strefowych, które pozwalają na przypisanie atrybutów z danych rastrowych warstwom wektorowym poprzez obliczanie szeregu statystyk.
4. Uruchom narzędzie Zonal Statistics as Table i zdefiniuj parametry jak poniżej (ryc. 14):• Input raster or feature zone data – wybierz warstwę wektorową, dla której policzone zostaną przypisa-
ne atrybuty – wskaż plik OT_BUBD_A (ryc. 14; nr 1);• Zone field określa kolumnę, w której zdefiniowany jest atrybut różnicujący rekordy – wskaż kolumnę
FID (ryc. 14; nr 2);• Input value raster określa warstwę rastrową, z której mają być liczone atrybuty – wybierz warstwę
Solar_radiation (ryc. 14; nr 3);• Output table – definiuje lokalizację dla zapisywanej tabeli wynikowej; wskaż ścieżkę lokalizacji pozo-
stałych danych oraz nadaj nazwę Statystyki.dbf. Uwaga: należy nadać rozszerzenie pliku *.dbf, w innym przypadku utworzona zostanie tabela w formacie INFO (ryc. 14; nr 4);
• Ignore NoData in calculations pozwala pomijać w statystykach komórki warstwy rastrowej, które nie posiadają wartości, tzw. NoData (ryc. 14; nr 5);
• Statistics type wskazuje statystykę, która ma być zastosowana do obliczeń z warstwy Solar_radiation
Ryc. 12. Warstwa potencjału słonecznego (w tle) wraz z obrysami dachów (bez wypełnienia)
Ryc. 13. Lokalizacja narzędzia Zonal Statistics as Table w menu
ArcToolbox

9. Zastosowania produktów LiDAR oraz przyszłość
170
dla każdego obiektu (fragmentu dachu) warstwy wektorowej. Wybierz statystykę średniej wartości–Mean (ryc. 14; nr 6).
5. W wyniku działania narzędzia, wygenerowana zostanie tabela w formacie *.DBF, która automatycznie zo-stanie dodana do programu ArcMap.
6. Kolejnym krokiem będzie określenie relacji tabeli statystyki.dbf z tabelą warstwy wektorowej obrysów dachów. W tym celu (ryc. 15):• kliknij prawym przyciskiem myszy na warstwę wektorową OT_BUBD_A w oknie Table Of Content,• wybierz opcję Joins and Relates (ryc. 15; nr 1),• z rozwiniętego menu wybierz opcję Join… (ryc. 15; nr 2).
7. W oknie Join Data wskaż (ryc. 16):• kolumnę warstwy wektorowej, która stanowi klucz podstawowy (ryc. 16; nr 1) – wybierając pole FID;• tabelę statystyki.dbf (ryc. 16; nr 2);• kolumnę w tabeli statystyki.dbf, która umożliwi dopisanie wartości (tzw. klucz obcy) po wybraniu pola
FID_ (ryc. 16; nr 3).
8. Po zdefiniowaniu relacji, w tabeli atrybutów (naciśnięcie prawym przyciskiem myszy na warstwę, a następ-nie wybór opcji (Open Attribute Table) warstwy wektorowej budynków widoczna staje się nowa kolumna średniej wartości nasłonecznienia – MEAN (ryc.17).
12
34
56
Ryc. 14. Narzędzie Zonal Statistics as Table
Ryc. 15. Połączenie tabeli z warstwą wektorową
1
2
3
Ryc. 16. Okno tworzenia relacji tabel
1 2

9.3. Analizy przestrzennego rozkładu nasłonecznienia na dachach budynków
171
Uwaga: wykonana relacja tego typu jest nietrwała. Oznacza to, że istnieje ona tylko w przestrzeni projektu *.mxd. W celu zachowania relacji, wyeksportuj warstwę, tworząc w ten sposób nową.
9.3.5. Wizualizacja obszarów o największym nasłonecznieniu
1. W celu wizualizacji średniej wartości nasłonecznienia dla wybranej połaci dachu, we właściwościach war-stwy wektorowej (dwukrotne naciśnięcie klawiszem myszy nazwy warstwy) OT_BUBD_A (ryc. 18):• przejdź do zakładki Symbology (ryc. 18; nr 1);• wybierz opcję Quantiles, a następnie Graduated colors (ryc. 18; nr 2);• wybierz pole MEAN jako źródło wartości atrybutów (ryc. 18; nr 3);• dostosuj kolorystykę oraz zakresy kolorów jak na poniższej rycinie (ryc. 18; nr 4).
2. Po zatwierdzeniu odpowiedniej kolorystyki, dane nasłonecznienia zostają zwizualizowane w klasach (ryc. 19).
Ryc. 17. Tabela atrybutów warstwy OT_BUBD_A po dokonaniu relacji
Ryc. 18. Modyfikacja symboliki warstwy wektorowej OT_BUBD_A
1
2 3 4
Ryc. 19. Wizualizacja potencjału solarnego

9. Zastosowania produktów LiDAR oraz przyszłość
172
3. Wykorzystując numeryczny model pokrycia terenu (NMPT), przy użyciu oprogramowania ArcScene (Esri) można stworzyć wizualizację warstwy nasłonecznienia w trybie 3D. Przed przystąpieniem do wizualizacji ogranicz warstwę nasłonecznienia do warstwy wektorowej budynków. Wykorzystaj polecenie Clip, znajdu-jące się w grupie narzędzi Data Management (Arc Toolbox).
4. Wybierz narzędzie Clip i ustaw parametry zgodnie z ryc. 20:• wskaż warstwę rastrową nasłonecznienia (ryc. 20; nr 1);• wskaż warstwę wektorową, do której warstwa rastrowa ma być ograniczona (ryc. 20; nr 2);• zaznacz opcję umożliwiającą przycięcie dokładnie do geometrii wektorów (ryc. 20; nr 3);• wybierz lokalizację i nazwę wynikowej warstwy rastrowej w postaci pliku o nazwie Solar_clip.tif
(ryc. 20; nr 4).
5. W celu wizualizacji 3D, do uruchomionego (na ekranie głównym systemu Windows 8.1 należy wcisnąć kombinację klawiszy: Windows+Q, następnie w pojawiającym się po prawej stronie ekranu oknie wyszukaj wpisz ciąg znaków ‘ArcScene’. Po kliknięciu w ikonę programu ArcScene, która pojawi się poniżej, nastąpi uruchomienie aplikacji) programu ArcScene wczytaj (Add data…) następujące pliki:• numeryczny model pokrycia terenu: NMPT.tif,• cyfrową ortofotomapę lotniczą: Ortofotomapa.tif,• ograniczoną warstwę rastrową nasłonecznienia: Solar_clip.tif.
6. Po wczytaniu danych do oprogramowania ArcScene należy wykonać:• drapowanie ortofotomapy lotniczej na numerycznym modelu pokrycia terenu (plik NMPT.tif), tak by
kompozycja wynikowa przypominała ryc. 21A (dwukrotne kliknięcie przyciskiem myszy na warstwę Ortofotomapa.tif, następnie zakładka Base Heights/Floating on a custom surface oraz wskazanie war-stwy NMPT.tif).
• dokonaj udrapowania na warstwie numerycznego modelu pokrycia terenu (plik NMPT.tif) ograniczonej warstwy potencjału słonecznego z parametrem przesunięcia w pionie równym 0,2 (Offset) w stosunku do warstwy NMPT, tak by wynikowa kompozycja przypominała rycinę 21B (dwukrotne kliknięcie przy-ciskiem myszy na warstwę Solar_clip.tif następnie zakładka Base Heights/Floating on a custom surface oraz wskazanie warstwę NMPT.tif. Dodatkowo, w polu Layer offset należy wstawić wartość 0.2).
7. Po zakończeniu wizualizacji 3D projekt zapisz w katalogu z danymi (10_01_SOLAR).
12
34
Ryc. 20. Parametry narzędzia Clip
Ryc. 21. Etapy tworzenia wizualizacji 3D nasłonecznienia dachów z użyciem NMPT oraz cyfrowej ortofotomapy

9.3. Analizy przestrzennego rozkładu nasłonecznienia na dachach budynków
173
9.3.6. Podsumowanie
Powyższe ćwiczenie zaprezentowało algorytm analizy solarnej. W pierwszej części, na podstawie warstw wek-torowych oraz rastrowych wykonana została mapa potencjału solarnego. Wyniki następnie poddano integra-cji z warstwą wektorową budynków. Przygotowane dane zwizualizowano w środowisku 3D. Analizę solarną można także przeprowadzić w innych programach.
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

9. Zastosowania produktów LiDAR oraz przyszłość
174
9.4. Tworzenie profili podłużnych dla tras turystycznych oraz analizy widoczności
Ćwiczenie ma na celu poznanie zasad tworzenia plików wektorowych 3D oraz wykonywania analiz widocz-ności w kontekście projektowania tras turystycznych. Uczestnik zdobędzie umiejętności określania widocz-ności z wybranych punktów obserwacyjnych oraz analizy widoczności charakterystycznych punktów z trasy szlaku turystycznego.
Szacowany czas wykonania ćwiczenia: 45 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\10_02_TRASY
• nmt.tif – numeryczny model terenu o rozdzielczości 10 m (format TIFF);• nmpt.tif – numeryczny model pokrycia terenu o rozdzielczości 10 m (format TIFF);• ortofotomapa.tif – cyfrowa ortofotomapa lotnicza o rozdzielczości 0,25 m (format TIFF);• pkt.shp – punkty charakterystyczne elementów trasy (format SHP);• szlak_pieszy.shp – przebieg szlaku turystycznego (format SHP);• Dunajec.shp – przebieg rzeki Dunajec (format SHP).
Obszar: Pieniny
Oprogramowanie: ArcMap (Esri), ArcScene (Esri)
ETAPY REALIZACJI ĆWICZENIA
9.4.1. Wczytanie wektora szlaków turystycznych, NMT, NMPT i ortofotomapy
1. W celu wykonania ćwiczenia, otwórz pusty projekt w programie ArcMap.
2. Dodaj do projektu (File >> Add Data >> Add Data…) wszystkie dane znajdujące się w folderze 10_02_TRASY oraz zapoznaj się nimi.
9.4.2. Nadawanie wartości wysokości (Z) wektorom szlaków (SHP 3D) z modelu NMT
1. W celu utworzenia plików SHAPE 3D użyj narzędzia Interpolate Shape (Arc Toolbox >> 3D Analyst Tools >> Functional Surface >> Interpolate Shape), stosując jako źródło wysokości plik nmt.tif (ryc.1). Operację powtórz dla każdego z plików *.shp (pkt.shp, szlaki_piesze.shp, Dunajec.shp), tworząc pliki SHAPE 3D z przy-rostkiem „_3D” (pkt_3D.shp, szlaki_piesze_3D.shp, Dunajec_3D.shp). Otrzymamy w ten sposób pliki wektoro-we 3D z zapisaną wysokością n.p.m.

9.4. Tworzenie profili podłużnych dla tras turystycznych oraz analizy widoczności
175
2. W celu dodania do tabeli atrybutów nowo utworzonych plików statystyk dotyczących wysokości (ryc. 2), skorzy-staj z narzędzia Add Z Information (Arc Toolbox >> 3D Analyst Tools >> 3D Features >> Add Z Information). Operację powtórz dla wszystkich plików SHAPE 3D, tj. pkt_3D.shp, szlaki_piesze_3D.shp, Dunajec_3D.shp.
9.4.3. Wizualizacja przebiegu szlaku turystycznego w oknie ArcScene
1. Utworzone pliki SHAPE 3D wczytaj do nowego projektu programu ArcScene. Dodatkowo wczytaj pliki rastrowe ortofotomapa.tif oraz nmpt.tif. Dodaj dane do okna programu, używając narzędzia: File >> Add Data >> Add Data…
2. W celu wyświetlenia w widoku 3D plików rastrowych ortofotomapa.tif oraz nmpt.tif (ryc. 3), wskaż we wła-ściwościach warstwy jako źródło wysokości (Base Heights) plik nmpt.tif, zgodnie z ryc. 4. W tym celu kliknij
Ryc. 1. Tworzenie pliku pkt_3D.shp przy pomocy narzędzia Interpolate Surface (3D Analyst)
Ryc. 2. Dodawanie wartości wysokości (Z) do tabeli atrybutów pliku pkt_3D.shp

9. Zastosowania produktów LiDAR oraz przyszłość
176
prawym przyciskiem myszy na wybraną warstwę, a następnie wybierz Layer Properties >> Base Heights. Operację powtórz dla obydwu warstw: ortofotomapa.tif oraz nmpt.tif.
Ryc. 3. Wizualizacja danych w programie ArcScene
Ryc. 4. Wskazanie źródła wysokości dla pliku ortofotomapa.tif w celu wizualizacji 3D w programie ArcScene

9.4. Tworzenie profili podłużnych dla tras turystycznych oraz analizy widoczności
177
9.4.4. Określenie pozycji obserwatora, celu jego obserwacji i parametrów kątowych
1. Celem omawianego etapu ćwiczenia jest określenie widoczności ze szczytu Trzech Koron przy założeniu, że wzrok obserwatora znajduje się 2 m ponad powierzchnią gruntu, a obserwacja wykonywana jest w zakresie azymutów 180̧ 270 stopni. Analizę wykonaj w programie ArcMap. W celu ustawienia obserwatora na wysokości 2 m, dodaj w tabeli atrybutów pliku pkt_3D.shp kolumnę OFFSETA (Table Options >> Add Field…; Name:OFFSETA, Type:Short Integer, Precision:3) i nadaj jej wartość 2 m w przypadku szczytu Trzy Korony. Włącz edycję pliku (Editor >> Start Editing), aby wpisać wartość w odpowiedniej komórce tabeli atrybutów. Po wpisaniu wartości zakończ edycję i zapisz zmiany (Editor >> Stop Editing). W celu zdefiniowania parametrów kątowych obserwacji, dodaj analogicznie dwa dodatkowe atrybuty AZIMUTH1 oraz AZIMUTH2 i nadaj im odpowiednio wartości 180 i 270.
2. Następnie wyselekcjonuj (Select Features >> Select by Rectangle) punkt o nazwie Trzy Korony, tak aby tylko jeden szczyt był uwzględniony w analizie widoczności, z pominięciem szczytu Sokolicy (ryc. 5).
3. Po wyselekcjonowaniu odpowiedniego punktu otwórz narzędzie Viewshed (Arc Toolbox >> 3D Analyst Tools >> Visibility >> Viewshed), wybierając jako model wysokości terenu plik nmpt.tif. Jako warstwę Input point or polyline observer features wskaż plik pkt_3D.shp. Nazwa pliku wyjściowego powinna być zdefi-niowana jako widocznosc_Trzy_Korony_azymut.tif (ryc. 6). Plik wyjściowy wskazuje obszary widoczne i nie-widoczne ze szczytu Trzech Koron.
4. W ostatnim etapie przeanalizuj uzyskany wynik w oknie programu ArcScene. Dodaj warstwę widocznosc_Trzy_Korony_azymut.tif do nowego projektu (File >> Add DatAdd Data…). Następnie nadaj nowo utwo-rzonej warstwie wartości wysokości z pliku nmpt.tif. W tym celu kliknij prawym przyciskiem myszy na tą warstwę, a następnie wybierz Layer Properties >> Base Heights. W polu Elevation from surfaces wybierz ustawienia analogiczne jak w akapicie drugim punktu 9.4.3.
Ryc. 5. Zdefiniowanie pozycji i parametrów kątowych obserwatora oraz wyselek-cjonowanie szczytu Trzy Korony do analizy widoczności
Ryc. 6. Wykonanie analizy widoczności ze szczytu Trzech Koron ze zdefiniowa-niem parametrów obserwatora

9. Zastosowania produktów LiDAR oraz przyszłość
178
9.4.5. Analiza widoczności charakterystycznych elementów z trasy szlaku turystycznego
1. Celem ostatniego etapu ćwiczenia jest sprawdzenie, z których miejsc na szlakach turystycznych – pieszym i wodnym – widoczne będą szczyty Trzy Korony oraz Sokolica. W tym celu dodaj do pliku pkt_3D.shp atry-but OFFSETB i nadaj mu wartość 2 m dla obu punktów. Dodawanie atrybutu i nadawanie wartości wyko-naj analogicznie do akapitu pierwszego w punkcie 9.4.4. Dzięki temu będzie można sprawdzić dla każdej komórki rastra nmpt.tif, czy wymienione szczyty będą widoczne, jeśli obserwator będzie znajdował się na wysokości 2 m powyżej wysokości numerycznego modelu powierzchni terenu.
2. Na potrzeby omawianej analizy ustawione wartości parametrów OFFSETA oraz AZIMUTH1 1 zamień na wartość 0, natomiast atrybut AZIMUTH2 ustaw na wartość 360. Pamiętaj, że w celu wykonania edycji tabeli atrybutów (ryc. 7) musisz użyć poleceń Editor >> Start Editing oraz Editor >> Stop Editing. W tym przy-padku analizowane są obydwa szczyty, dlatego usuń z selekcji punkt Trzy Korony narzędziem Selection >> Clear Selected Features.
3. W celu wykonania omawianej analizy widoczności zastosuj narzędzie Observer Points (Arc Toolbox >> 3D Analyst Tools >> Visibility >> Observer Points), używając ustawień przedstawionych na rycinie 8.
4. Wynikiem opisanej analizy jest plik rastrowy szczyty.tif, którego wartości opisują widoczność analizowa-nych szczytów. Na przykład wartość 1 oznacza, że z obszaru oznaczonego tą wartością widoczny jest szczyt Trzech Koron, natomiast nie jest widoczna Sokolica (ryc. 9).
Ryc. 7. Zdefiniowanie parametrów obserwacji w tabeli atrybutów pliku pkt_3D.shp
Ryc. 8. Wykonanie analizy widoczności z wykorzystaniem narzędzia Observer Points

9.4. Tworzenie profili podłużnych dla tras turystycznych oraz analizy widoczności
179
5. Ostatnim etapem ćwiczenia jest wygenerowanie pliku wektorowego reprezentującego odcinki pieszego szlaku turystycznego, z których widoczny jest szczyt Trzech Koron.
6. W pierwszym kroku wykonaj polecenie Raster to Polygon (Arc Toolbox >> Conversion Tools >> From Raster >> Raster to Polygon), używając ustawień przedstawionych na rycinie 10. Ważne jest ustawienie wartości pola Field na OBS1. Oznacza to, że powstanie plik wektorowy reprezentujący widoczność ze szczuty Trzech Koron, z pominięciem Sokolicy. Nazwij plik wyjściowy widocznosc_Trzy_Korony.shp.
7. Wynikowy plik SHP widocznosc_Trzy_Korony.shp zawiera w polu GRIDCODE wartości 0 lub 1, definiujące widoczność szczytu.
8. Następnie wyselekcjonuj wszystkie poligony definiujące obszar, z którego szczyt Trzech Koron jest widocz-ny (Selection >> Select by Attributes, ”GRIDCODE” = 1).
9. W ostatnim kroku wykonaj polecenie Intersect (Geoprocessing >> Intersect), używając jako warstwy wej-ściowe plików: widocznosc_Trzy_Korony.shp oraz szlak_pieszy_3D.shp. Plik wyjściowy polecenia Intersect nazwij Trzy_Korony_szlak_pieszy.shp.
10. Warstwa wynikowa o nazwie Trzy_Korony_szlak_pieszy.shp reprezentuje odcinki pieszego szlaku turystycz-nego, z których widoczny jest szczyt Trzech Koron (ryc. 11).
11. Spróbuj samodzielnie wykonać podobną analizę dla szlaku wodnego (Dunajec_3D.shp) i szczytu Sokolicy.
Ryc. 9. Wynik analizy widoczności przeprowadzonej przy użyciu narzędzia Observer Points
Ryc. 10. Konwersja warstwy rastrowej do formatu SHP

9. Zastosowania produktów LiDAR oraz przyszłość
180
9.4.6. Podsumowanie
Ćwiczenie miało na celu poznanie podstawowych możliwości pracy z plikami SHAPE 3D oraz wykonanie analiz widoczności pod kątem widoczności na szlaku turystycznym. W pierwszym etapie utworzono pliki wektorowe w formacie SHAPE 3D oraz dokonano wizualizacji danych w programie ArcScene. Następnie wykonano analizę widoczności ze szczytu trzech Koron wprowadzając dodatkowe parametry definiujące pozycję obserwatora i parametry kątowe obserwacji. W ostatniej części ćwiczenia przeprowadzono analizę polegającą na wyzna-czeniu odcinków pieszego szlaku turystycznego, z których widoczny jest szczyt Trzech Koron. Podobne anali-zy można wykonać w programie QGIS.
Ryc. 11. Wynikowa warstwa Trzy_Korony_szlak_pieszy.shp przedstawiająca odcinki szlaku pieszego, z których widoczny jest szczyt Trzech Koron
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

9.5. Identyfikacja przeszkód dla ruchu lotniczego
181
9.5. Identyfikacja przeszkód dla ruchu lotniczego
Dane pochodzące z lotniczego skanowania laserowego mogą posłużyć do wsparcia analiz lokalizacji prze-szkód lotniczych. Ustawa Prawo lotnicze z dnia 3 lipca 2002 roku (Dz.U. z 2013 r. poz. 1393) w art. 87.2 stanowi, iż przeszkody lotnicze to obiekty budowlane i obiekty naturalne stanowiące zagrożenie dla bezpieczeństwa ruchu statków powietrznych. Obiekty, które będą rozpatrywane w ćwiczeniu i które mogą stanowić przeszko-dy lotnicze, to obiekty o wysokości co najmniej 50 m powyżej powierzchni terenu lub wody. Do identyfikacji przeszkód lotniczych za pomocą oprogramowania GIS wykorzystuje się znormalizowany numeryczny model pokrycia terenu (zNMPT). Model ten jest wynikiem różnicy NMPT oraz NMT.
Uwaga: udostępniane numeryczne modele pokrycia terenu najczęściej nie zawierają obiektów z war-stwy 1 – Unclassified, gdzie mogą znajdować się np. anteny i maszty, których wysokość przekracza 50 metrów. W związku z tym za materiał źródłowy należy uważać chmurę punktów LiDAR.Po wykonaniu tego ćwiczenia uczestnik nabędzie umiejętność wyszukiwania obiektów stanowiących poten-cjalną przeszkodę lotniczą.
Szacowany czas wykonania ćwiczenia: 45 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\10_03_PRZESZKODY
• 10_03_PRZESZKODY.mxd – projekt programu ArcMap (Esri);• N-34-138-B-d-2-2.tif – ortofotomapa w formacie TIFF, o rozdzielczości 10 cm;• N-34-139-A-c-1-1.tif – ortofotomapa w formacie TIFF, o rozdzielczości 10 cm;• przeszkody.las – sklasyfikowana chmura punktów ALS w formacie LAS 1.2 Data Point Record
Format 3;• przeszkody_obszar_analizy.shp – plik z obszarem analizy (format SHP).
Obszar: Warszawa
Oprogramowanie: LP360 (QCoherent), ArcMap (Esri)
ETAPY REALIZACJI ĆWICZENIA
9.5.1. Wygenerowanie zNMPT
1. W pierwszym kroku należy otworzyć projekt z folderu ćwiczeniowego 10_03_Przeszkody, klikając dwukrot-nie na plik 10_03_PRZESZKODY.mxd.
2. Zostanie automatycznie uruchomiony program ArcMap z załadowanymi danymi: przeszkody_obszar_analizy.shp, N-34-139-A-c-1-1.tif i N-34-138-B-d-2-2.tif, przeszkody.las (ryc. 1).
Ryc. 1. Dane widoczne po otwarciu projektu: chmura punktów ALS wyświetlona według wysokości na tle cyfrowej ortofotomapy oraz
obrys obszaru analiz

9. Zastosowania produktów LiDAR oraz przyszłość
182
3. Wykonaj przekrój poprzeczny funkcją Draw a profile line z paska narzędziowego LP360 Viewer Integration, aby zobaczyć elementy, jakie zawiera chmura punktów ALS. Pojawi się okno Profile Window, w którym będzie widoczna chmura punktów zwizualizowana według atrybutu klasy (ryc. 2).
4. Korzystając z funkcji eksportu danych LiDAR (LP360 Export Wizard; ryc. 3), wygeneruj NMT.
5. W pierwszym kroku generowania NMT wybierz parametry widoczne na rycinie 4. Dodatkowo ustaw filtr opcją Filter… (ryc. 4; nr 1) wybierając wyłącznie klasę 2 – Ground. Przejdź do następnego kroku, wybierając przycisk Next (ryc. 4; nr 2).
6. W następnych krokach skorzystaj z domyślnych ustawień poszczególnych okien, a eksportowany plik zapisz w folderze Robocze i nazwij NMT_Przeszkody. Po wybraniu Finish zostanie wygenerowany i automatycznie dodany do projektu plik rastrowy NMT o nazwie NMT_Przeszkody_elev.flt.
Ryc. 2. Profil chmury punktów ALS wyświetlony według atrybutu klasy (kolory: pomarańczowy – punkty leżące na gruncie, czerwony – budynki, odcienie zieleni –
roślinność, fioletowy – szum, szary – punkty niesklasyfikowane)
Ryc. 3. Funkcja eksportu z paska narzędziowego LP360 Export Wizard
Ryc. 4. Parametry eksportu NMT
1
2

9.5. Identyfikacja przeszkód dla ruchu lotniczego
183
7. Korzystając z tej samej funkcji eksportu danych LiDAR (LP360 Export Wizard; ryc. 3), wygeneruj NMPT, uwzględniając wszystkie klasy poza szumami. W pierwszym kroku wybierz Filter… (ryc. 4; nr 1) i w wyświe-tlonym oknie zaznacz wszystkie klasy poza 7 – Low Point (noise).
8. W następnych krokach skorzystaj z domyślnych ustawień poszczególnych okien, a eksportowany plik zapisz w folderze Robocze i nazwij NMPT_Przeszkody. Po wybraniu Finish zostanie wygenerowany i automatycznie dodany do projektu plik rastrowy NMPT o nazwie NMPT_Przeszkody_elev.flt.
9. Użyj funkcji odejmowania rastrów dostępnej w ArcTolbox >> 3D Analyst Tools >> Raster Math >> Minus w celu wygenerowania zNMPT. W wyświetlonym oknie wybierz modele tak jak na rycinie poniżej oraz folder Robocze jako miejsce zapisu pliku wynikowego z nadaną nazwą zNMPT (ryc. 5).
10. Po naciśnięciu OK plik zostanie wygenerowany i automatycznie dodany do programu.
9.5.2. Wykonanie reklasyfikacji rastra
1. W ćwiczeniu zostanie wydzielona grupa przeszkód lotniczych w centrum miasta stołecznego Warszawa. Do ich wyznaczenia niezbędne jest wykonanie reklasyfikacji zNMPT, tak aby pozostały jedynie piksele o war-tości wysokości równej lub większej niż 50 m. W tym celu należy skorzystać z narzędzia Raster Calculator znajdującego się w ArcToolbox programu ArcMap (ArcToolbox >> Spatial Analyst Tools >> Map Algebra >> Raster Calculator).
Po uruchomieniu kalkulatora rastrów należy zdefiniować polecenie, którym pikselom o atrybucie mniejszym niż 50 m przypisze pustą wartość (funkcja SetNull). W tym celu wpisz polecenie: SetNull(„zNMPT” < 50,”zNMPT”) (ryc. 6). Jako miejsce zapisu rastra wyjściowego należy wybrać folder Robocze, a następnie nadać nazwę zNMPT_50.
2. Po wybraniu OK zostanie wygenerowany raster z pikselami, których wysokość to minimum 50 m (ryc. 7).
Ryc. 5. Parametry generowania rastrowego modelu różnicowego zNMPT
Ryc. 6. Usuwanie wartości dla pikseli o atrybucie mniejszym niż 50 m w Raster Calculator

9. Zastosowania produktów LiDAR oraz przyszłość
184
9.5.3. Analiza wygenerowanych przeszkód lotniczych i weryfikacja na tle ortofotomapy
1. Wstępną weryfikację przeszkód można wykonać, wyświetlając w oknie ArcMap cyfrową ortofotomapę oraz utworzony zNMPT z wyselekcjonowanymi obiektami. W tym celu w Table Of Contents odznacz widoczność wszystkich plików poza zNMPT_50, N-34-138-B-d-2-2.tif oraz N-34-139-A-c-1-1.tif.
2. Ustaw inny kolor wyświetlania zNMPT_50, aby zwiększyć czytelność analizowanego obszaru. W tym celu w oknie Table Of Contents wybierz sposób wyświetlania warstw jako List By Drawing Order (ryc. 8; nr 1), a następnie kliknij na skalę barw warstwy zNMPT_50 (ryc. 8; nr 2). Wybierz paletę Color Ramp od zielonego do czerwonego, a następnie zaznacz Invert (ryc. 9). Piksele o najniższej wartości zostaną wyświetlone jako czerwone, a o największej wartości jako zielone.
3. W celu identyfikacji przeszkód przybliż się do wybranego miejsca i wykonaj analizę położonego tam obiek-tu (ryc. 10).
Ryc. 7. Obiekty występujące w obszarze opracowania, dla których wysokość to minimum 50 m
Ryc. 8. Wybór koloru warstwy
1
2
Ryc. 9. Ustawienia koloru war-stwy zNMPT_50

9.5. Identyfikacja przeszkód dla ruchu lotniczego
185
Uwaga: na cyfrowej ortofotomapie lotniczej prawidłową lokalizację mają obiekty o wysokości opisy-wanej przez NMT, a więc sama powierzchnia terenu oraz płaskie obiekty, które są na niej położone. Obrazy obiektów „wystających” takich jak budynki, roślinność, wiadukty, mosty są przesunięte zgodnie z rzutem środkowym zdjęcia źródłowego. Produktem pozbawionym tej wady jest prawdziwa ortofotomapa cyfrowa, która jest rzutem ortogonalnym wszystkich obiektów zarejestrowanych na zdjęciu.
4. Ze względu na przesunięcia obiektów wysokich na cyfrowej ortofotomapie, nie jest możliwa prawidłowa identyfikacja przeszkód lotniczych (ryc. 11).
9.5.4. Automatyczna wektoryzacja wykrytych przeszkód
1. W celu wektoryzacji wykrytych przeszkód, skorzystaj z funkcji Raster Calcutator i przeklasyfikuj zNMT tak, aby obszarom równym lub wyższym niż 50 m nadać wartość 1.
2. W oknie Raster Calculator w obszarze Map Algebra expression wpisz wyrażenie SetNull(„zNMPT”<50,1), jako Output raster zdefiniuj nazwę dla pliku wynikowego zNMT_50_maska.tif. W wyniku wykonanego przetworzenia otrzymałeś maskę obszarów o wysokości minimum 50 m nad terenem.
3. W celu wektoryzacji obszaru, który będzie podlegał analizie, skorzystaj z funkcji Raster to Polygon dostęp-nej w ArcToolbox >> Conversion Tools >> From Raster ustawiając parametry eksportu dokładnie takie same jak na rycinie poniżej (ryc. 12). Wciśnij OK.
Ryc. 10. Przeszkody lotnicze na tle cyfrowej ortofotomapy
Ryc. 11. Przesunięcie budynku na cyfrowej ortofotomapie względem zidentyfiko-wanej przeszkody lotniczej

9. Zastosowania produktów LiDAR oraz przyszłość
186
4. Wynikiem jest wygenerowana warstwa ZNMPT_50_obrys z obrysami przeszkód, która zostanie automatycz-nie dodana do projektu ArcMap (ryc. 13).
9.5.5. Nadawanie wysokości dla zinwentaryzowanych przeszkód
1. Skorzystaj z funkcji zapisu statystyk do tabeli Zonal Statistics as Table, aby przypisać wartość maksymalnej wysokości względnej wygenerowanym obrysom (zidentyfikowanym przeszkodom). Polecenie znajduje się w ArcToolbox >> Spatial Analyst Tools >> Zonal >> Zonal Statistics as Table.
2. W wyświetlonym oknie, wybierz warstwę zNMPT_50_obrys (ryc. 14; nr 1) i jako identyfikator wybierz ID (ryc. 14; nr 2). Następnie wskaż wygenerowany raster z wysokościami względnymi zNMPT_50 (ryc. 14; nr 3), wybierz folder zapisu Robocze i wpisz nazwę pliku wynikowego zNMPT_50_obrysy_wysokosc (ryc. 14; nr 4). Jako typ statystyk wybierz MAXIMUM (ryc. 14; nr 5). Pozostałe parametry pozostaw domyślne (ryc. 14). Zatwierdź klawiszem OK. W oknie Table Of Contents pojawi się wygenerowana tabela.
Ryc. 12. Parametry konwersji rastra do pliku shapefile
Ryc. 13. Warstwa wektorowa z obrysami przeszkód

9.5. Identyfikacja przeszkód dla ruchu lotniczego
187
3. Celem dołączenia wygenerowanych wartości maksymalnych wysokości względnych do tabeli atrybutów pliku zNMPT_50_obrys skorzystaj z funkcji Join. W tym celu w oknie Table Of Contents kliknij prawym kla-wiszem myszy na nazwę pliku i wybierz Joins and Relates >> Join…
4. W wyświetlonym oknie wybierz pole ID (ryc. 15; nr 1) jako identyfikator obiektów z pliku zNMPT_50_obrys. Jako tabelę wskaż zNMPT_50_obrysy_wysokosc (ryc. 15; nr 2) i również ustaw jako identyfikator ID (ryc. 15; nr 3). Pozostałe parametry pozostaw bez zmian i naciśnij OK.
Ryc. 14. Okno eksportu statystyk do tabeli
1
2
3
4
5
Ryc. 15. Ustawienia parametrów dołączania atrybutów z tabeli do pliku SHP
1
2
3

9. Zastosowania produktów LiDAR oraz przyszłość
188
5. Po wyświetleniu tabeli atrybutów warstwy zNMPT_50_obrys (w oknie Table Of Contents kliknij prawym klawi-szem myszy na nazwę warstwy i wybierz Open Attribute Table) będą widoczne wszystkie dołączone do niej statystyki (ryc. 16). W kolumnie MAX znajduje się wysokość względna potencjalnych przeszkód lotniczych.
9.5.6. Analiza przeszkód na chmurze punktów ALS
1. W celu wykonania identyfikacji przeszkód lotniczych na chmurze punktów ALS należy skorzystać z funkcji generowania przekrojów na pasku LP360 Viewer Integration (ryc. 17).
2. W pierwszym kroku w oknie Table Of Contents odhacz wszystkie warstwy poza zNMPT_50_obrys.shp. Zo-stanie widoczna tylko ta warstwa. Zmień jej sposób wyświetlania (kliknij na symbol warstwy w oknie Table Of Contents) na niebieski obrys bez wypełnienia (ryc. 18). Ułatwi to lokalizację przeszkód lotniczych.
Ryc. 16. Tabela atrybutów warstwy zNMPT_50_obrys po dołączeniu statystyk
Ryc. 17. Pasek narzędziowy do generowania przekro-jów przez chmurę punktów ALS
Ryc. 18. Ustawienia wyświetlania warstwy wektorowej zNMPT_50_obrys

9.5. Identyfikacja przeszkód dla ruchu lotniczego
189
3. Za pomocą funkcji Draw a profile line z paska narzędziowego LP360 Viewer Integration, narysuj przekrój dla wybranego obrysu przeszkody lotniczej. Wyświetlony zostanie przekrój przez chmurę punktów ALS pokolorowaną według atrybutów, co ułatwi identyfikację obiektów położonych w miejscu wyznaczenia przeszkody lotniczej (ryc. 19).
4. Za pomocą funkcji Measure w oknie profilu (ryc. 20) możesz dokonać manualnego pomiaru wysokości obiektów na przekroju chmury punków ALS. Pomierz w ten sposób wybraną przeszkodę lotniczą, a na-stępnie sprawdź w tabeli atrybutów (w oknie Table Of Contents kliknij prawym klawiszem myszy na nazwę warstwy i wybierz Open Attribute Table) jakie statystyki zostały jej przypisane jako wysokość względna (kolumna MAX).
9.5.7. Podsumowanie
Głównym celem ćwiczenia była analiza centrum Warszawy pod kątem występowania przeszkód lotniczych o wysokości minimum 50 m nad terenem. Opierając się o wyniki modelu różnicowego, została wygenerowana warstwa wektorowa z obrysami potencjalnych przeszkód lotniczych. Następnie każdej przeszkodzie został przy-pisany atrybut wysokości. Ostatnim etapem była wizualna ocena obiektów uznanych za przeszkody lotnicze.
Ryc. 19. Identyfikacja wyznaczonej przeszkody lotniczej. Po lewej obrys przeszko-dy wraz z lokalizacją przekroju; po prawej przekrój przez sklasyfikowaną chmurę
punktów ALS
Ryc. 20. Funkcja manualnego pomiaru w oknie profilu
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

9. Zastosowania produktów LiDAR oraz przyszłość
190
9.6. Analizy wskaźników struktury przestrzennej zieleni miejskiej w oparciu o dane LiDAR
Ćwiczenie ma na celu poznanie możliwości wykorzystania chmury punktów ALS w analizie struktury zieleni miejskiej oraz zastosowania produktów przetwarzania danych LiDAR w analizach widoczności. Po wykonaniu ćwiczenia uczestnik szkolenia zdobędzie praktyczną umiejętność analizy struktury roślinności, wizualizacji wy-ników, a także wykonywania analiz widoczności.
Szacowany czas wykonania ćwiczenia: 45 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\10_04_ZIELEN_MIEJSKA
• M-34-90-A-b-1-4-4-3.las, M-34-90-A-b-1-4-4-4.las, M-34-90-A-b-2-3-3-3.las, M-34-90-A-b-2-3-3-4.las, M-34-90-A-b-3-2-2-1.las, M-34-90-A-b-3-2-2-2.las, M-34-90-A-b-3-2-2-3.las, M-34-90-A-b-3-2-2-4.las, M-34-90-A-b-3-2-4-1.las, M-34-90-A-b-3-2-4-2.las, M-34-90-A-b-4-1-1-1.las, M-34-90-A-b-4-1-1-2.las, M-34-90-A-b-4-1-1-3.las, M-34-90-A-b-4-1-1-4.las, M-34-90-A-b-4-1-3-1.las, M-34-90-A-b-4-1-3-2.las – chmury punktów ALS w formacie LAS 1.2 Point Data Record Format 3;
• clip_NMPT.bat – plik wsadowy do wygenerowania zasymulowanego numerycznego modelu po-krycia terenu z usuniętymi drzewami w określonym obszarze;
• drzewa_do_us.shp – plik określający obszar usunięcia roślinności w celu wygenerowania zasymu-lowanego modelu NMPT (format SHP);
• pkt_obs.shp – plik definiujący lokalizację punktu obserwacyjnego (format SHP).
Obszar: Nowy Sącz
Oprogramowanie: FUSION (USDA Forest Service–Pacific Northwest Research Station), LAStools (rapidlasso GmbH), FugroViewer (Fugro Geospatial Services), ArcMap (Esri)
ETAPY REALIZACJI ĆWICZENIA
9.6.1. Generowanie warstwy modelu koron drzew (MKD)
1. Generowanie MKD należy poprzedzić normalizacją chmur punktów ALS. Normalizacja polega na zreduko-waniu wysokości bezwzględnej odbić promienia lasera (punktów) do wysokości względnej w stosunku do powierzchni gruntu. W ćwiczeniu utworzone zostaną nowe znormalizowane chmury punktów ALS, zapisa-ne w plikach z przyrostkiem „_norm”. W celu przeprowadzenia normalizacji chmur punktów, kliknij lewym przyciskiem myszy na pasek adresu w otwartym folderze 10_04_Zielen_miejska z danymi ALS, wprowadź polecenie cmd i zatwierdź przyciskiem ENTER.
2. Następnie w oknie linii komend wpisz poniższe polecenia, które w pierwszym kroku utworzą listę plików (lista_LAS.txt), a w drugim dokonają normalizacji chmur punktów (ryc. 1):
dir/b *.las > lista_LAS.txtENTER
lasheight –lof lista_LAS.txt -replace_z -odix _normENTER
Ryc. 1. Utworzenie listy plików *.LAS oraz normalizacja chmur punktów narzędziem lasheight z poziomu linii komend oprogramowania LAStools

9.6. Analizy wskaźników struktury przestrzennej zieleni miejskiej w oparciu o dane LiDAR
191
3. Do porównania oryginalnych chmur punktów z chmurami znormalizowanymi, można wykorzystać pro-gram FugroViewer (widok 3D). Otwórz (prawy klawisz myszy\Otwórz) jeden z plików oryginalnych oraz odpowiadający mu plik znormalizowany i dokonaj wizualnego porównania. Po wybraniu polecenia Otwórz pliki otworzą się w programie FugroViewer.
4. W celu wygenerowania modelu koron drzew (MKD; odpowiednik zNMPT dla warstwy roślinności wysokiej) o rozdzielczości terenowej 1,0 m, użyj polecenia FUSION, wpisując je do okna linii komend:
CanopyModel /class:2,4,5 /median:3 MKD.dtm 1 m m 0 0 0 0 *_norm.las
5. Wygenerowany model MKD.dtm został wygładzony filtrem medianowym w oknie 3 × 3 piksele (opcja /median:3). Do generowania MKD wykorzystano punkty ALS z klas o numerach: 2-grunt oraz 4,5 – klasy ro-ślinności średniej i wysokiej. Wizualizację modelu MKD wykonaj w programie PDQ z pakietu FUSION (ryc. 2). Program znajduje się w następującej lokalizacji: C:\FUSION\pdq.exe. Wybierz File >> Open..., aby otworzyć plik MKD.dtm.
9.6.2. Analiza zasięgu drzew i zadrzewień
1. Korzystając z narzędzia lasboundary (LAStools), wygeneruj w formacie SHP warstwę wektorową, określają-cą zasięg występowania pojedynczych drzew i zadrzewień. Wpisz w oknie linii komend następujące pole-cenie:
lasboundary –i *_norm.las –merged –o drzewa.shp –keep_class 5 –concavity 2
2. Darmowa wersja pakietu LAStools wprowadza ewentualne artefakty do wynikowego pliku wektorowego (ryc. 3). W celu uzyskania prawidłowej warstwy zasięgu drzew drzewa_gotowe.shp, użyj następujących na-rzędzi programu ArcMap (w podanej kolejności): Repair Geometry (Arc Toolbox >> Data Management Tools >> Features >> Reparir Geometry; Input Features: drzewa.shp), Buffer (Geoprocessing >> Buffer, Input Features: drzewa.shp, Output Feature Class: drzewa_minus.shp, Distance\Linear Unit: -1) oraz Buffer (Geoprocessing >> Buffer, Input Features: drzewa_minus.shp, Output Feature Class: drzewa_gotowe.shp, Distance\Linear Unit: 1).
Dokonaj wizualizacji warstw drzewa.shp oraz drzewa_gotowe.shp w programie ArcMap (File >> Add Data >> Add Data…).
Ryc. 2. Model Koron Drzew zwizualizowany w programie PDQ (FUSION)
Ryc. 3. Usunięcie błędów z pliku drzewa.shp genero-wanych przez narzędzie lasboundary

9. Zastosowania produktów LiDAR oraz przyszłość
192
9.6.3. Określenie podstawowych statystyk dla grup drzew
1. Stosując narzędzie lascanopy (LAStools) można wygenerować warstwy rastrowe reprezentujące zwarcie drzew (-cov) oraz 95 percentyl wysokości (-p 95). Są to cechy często stosowane do opisu struktury roślin-ności. Warstwy wynikowe zostaną utworzone w rozdzielczości 10 × 10 m (-step). Ponieważ w omawianej analizie interesują nas głównie charakterystyki roślinności średniej i wysokiej, użyj dodatkowego parame-tru –keep_class. Wpisz następujące polecenie w oknie linii komend:
lascanopy -i *_norm.las -merged -p 95 -step 10 -keep_class 2 4 5 -cov -o metrics.tif
2. W wyniku działania polecenia, powstaną dwie warstwy rastrowe: metrics_cov.tif (zwarcie) oraz metrics_p95.tif (95-ty percentyl wysokości). Dokonaj ich wizualizacji w programie ArcMap (File >> Add Data >> Add Data…).
3. Pakiet FUSION posiada narzędzie CanopyMaxima, pozwalające szacować liczbę drzew na analizowanym terenie. Narzędzie wykorzystuje zależność pomiędzy wysokością drzewa a średnicą korony. Lokalne maksi-ma są identyfikowane za pomocą ruchomego okna o zmiennej wielkości, dopasowującej się w zależności od wysokości MKD. Wpisz następujące polecenie w oknie linii komend:
CanopyMaxima /res:1 /img24 MKD.dtm drzewa
4. Utworzona zostanie warstwa rastrowa drzewa_maxima.bmp, reprezentująca lokalizację lokalnych maksi-mów (kolor czerwony) i minimów (kolor niebieski), a także tabela drzewa_treelist.csv, zawierająca informa-cje o wysokości poszczególnych drzew, ich lokalizacji oraz minimalnej i maksymalnej szerokości korony. Korzystając z informacji o współrzędnych X, Y wierzchołków drzew, w programie ArcMap utwórz warstwę reprezentującą wierzchołki drzew, używając narzędzia Add XY Data (menu File >> Add Data >> Add XY Data). Po wykonaniu polecenia warstwa wierzchołków zostanie automatycznie wyświetlona w programie ArcMap. Dodatkowo wczytaj do projektu model koron drzew. W pierwszym kroku dokonaj konwersji pliku MKD.dtm do formatu ASCII, wpisując następujące polecenie w oknie linii komend:
DTM2ASCII MKD.dtm MKD.asc
5. Dodaj plik MKD.asc do projektu programu ArcMap poprzez wybór File >> Add Data >> Add Data…(ryc. 4).
9.6.4. Obliczenie współczynników wypełnia przestrzeni przez roślinność i budynki
1. Pakiet FUSION zawiera narzędzia SurfaceStats oraz GridSurfaceStats pozwalające na obliczenie staty-styk oraz wygenerowanie warstw rastrowych reprezentujących powierzchnię i objętość, zajmowane przez różne klasy obiektów. Istnieje np. możliwość określenia powierzchni zajmowanej przez roślinność i budynki oraz objętości przestrzeni znajdującej się pod powierzchnią zajmowaną przez te klasy. Poniższe instrukcje pozwalają na wygenerowanie statystyk i warstw pochodnych dla wspomnianych klas.
2. Wcześniej utwórz znormalizowany model wysokości dla klasy budynków o rozdzielczości 1,0 m (ryc. 5), wpisując następujące polecenie w oknie linii komend:
CanopyModel /class:2,6 /median:3 zNMPT_budynki.dtm 1 m m 0 0 0 0 *_norm.las
Ryc. 4. Wynik detekcji wierzchołków drzew za pomocą narzędzia CanopyMaxima

9.6. Analizy wskaźników struktury przestrzennej zieleni miejskiej w oparciu o dane LiDAR
193
3. Wygeneruj zbiorcze statystyki dla całego obszaru w formacie CSV, dotyczące powierzchni i objętości zajmo-wanych przez klasy roślinności i budynki. W tym celu użyj następujących poleceń w oknie linii komend:
SurfaceStats MKD.dtm statystyki_roslinnosc.csvSurfaceStats zNMPT_budynki.dtm statystyki_budynki.csv
4. Otwórz i przeanalizuj zawartość utworzonych plików w dowolnym programie odczytującym format CSV.
5. Narzędzie GridSurfaceStats umożliwia utworzenie rastrowych warstw pochodnych (piksel 10 m) chmury punktów, dotyczących powierzchni i objętości zajmowanych przez wybrane klasy. Wykonaj następujące polecenia w oknie linii komend:
GridSurfaceStats /area /ascii MKD.dtm roslinnosc 10GridSurfaceStats /area /ascii zNMPT_budynki.dtm budynki 10
6. Zwizualizuj (File >> Add Data >> Add Data…) utworzone warstwy rastrowe budynki_surface_volume.asc oraz roslinnosc_surface_volume.asc w programie ArcMap (ryc. 6) oraz zapoznaj się z ich opisem w instrukcji użytkownika oprogramowania FUSION (str. 89).
7. Na podstawie sklasyfikowanej chmury punktów można określić szereg wskaźników dotyczących struktu-ry danego obszaru, na przykład stosunek powierzchni zajmowanej przez roślinność do powierzchni bu-dynków. Korzystając z utworzonych wcześniej warstw rastrowych utwórz warstwę rosl_bud.tif narzędziem Raster Calculator (Arc Toolbox >> Spatial Analyst Tools >> Map Algebra >> Raster calculator) w progra-mie ArcMap. W oknie narzędzia Raster Calculator wpisz formułę:
”roslinnosc_surface_volume.asc”/”budynki_surface_volume.asc”
Zdefiniuj nazwę pliku wynikowego (Output Raster) jako rosl_bud.tif. Warstwa wynikowa zostanie automatycznie wczytana do projektu programu ArcMap.
Ryc. 5. Fragment znormalizowanego numerycznego modelu terenu dla klasy bu-dynków zwizualizowany w programie PDQ (FUSION)
Ryc. 6. Warstwy surface_volume dla budynków i roślinności

9. Zastosowania produktów LiDAR oraz przyszłość
194
9.6.5. Analizy widoczności na przykładzie symulacji wycięcia grupy drzew
1. Korzystając z produktów przetwarzania chmury punktów ALS można przeprowadzić analizy widoczności w programie ArcMap. Poniżej przedstawiono analizy widoczności dla wybranego fragmentu miasta Nowy Sącz, wykonane na podstawie rzeczywistego NMPT oraz zasymulowanego modelu NMPT, w którym usu-nięto roślinność w wybranym miejscu.
2. W pierwszej kolejności utwórz NMPT dla obszaru analiz, wykonując poniższe polecenia w oknie linii komend:CanopyModel /median:3 NMPT.dtm 1 m m 0 0 0 0 lista_LAS.txt
DTM2ASCII NMPT.dtm NMPT.asc
3. Następnie zwizualizuj (File >> Add Data >> Add Data…) utworzony model NMPT.asc wraz z plikiem pkt_obs.shp w programie ArcMap.
4. W kolejnym kroku korzystając z narzędzia Viewshed (ArcToolbox >> 3D Analyst Tools >> Visibility >> Viewshed) wygeneruj warstwę rastrową reprezentującą widoczność z miejsca zdefiniowanego w pliku pkt_obs.shp dla modelu NMPT.asc (ryc. 7). Wysokość obserwatora została ustalona na 2,0 m ponad gruntem w tabeli atrybutów pliku pkt_obs.shp (kolumna OFFSETA). Nazwij plik wynikowy jako wid_NMPT. Po wyko-naniu polecenia Viewshed plik wynikowy zostanie automatycznie dodany do programu ArcMap.
5. Następnie utwórz model NMPT pozbawiony roślinności w wybranym fragmencie. Proces generowania modelu NMPT_bez_drzew.asc został załączony w pliku wsadowym clip_NMPT.bat (ryc. 8). W celu utworzenia pliku NMPT_bez_drzew.asc kliknij prawym klawiszem myszy na plik clip_NMPT.bat i wybierz Otwórz. W ten sposób uruchomisz wykonywanie pliku wsadowego.
Ryc. 7. Generowanie warstwy widoczności (wid_NMPT) z punktu obserwacyjnego zdefiniowanego w pliku pkt_obs.shp narzędziem Viewshed
Ryc. 8. Treść pliku wsadowego clip_NMPT.bat tworzącego zasymulowany model NMPT_bez_drzew.asc

9.6. Analizy wskaźników struktury przestrzennej zieleni miejskiej w oparciu o dane LiDAR
195
6. Następnie, analogicznie do akapitu 3 (ArcToolbox >> 3D Analyst Tools >> Visibility >> Viewshed) wygene-ruj warstwę rastrową reprezentującą widoczność z miejsca zdefiniowanego w pliku pkt_obs.shp dla modelu NMPT_bez_drzew.asc. Nazwij plik wynikowy wid_MPT_bez_drzew. Po wykonaniu polecenia Viewshed, plik wynikowy zostanie automatycznie dodany do programu ArcMap.
7. Ostatecznie w programie ArcMap dokonaj wizualnego porównania (warstw widoczności wid_NMPT oraz wid_MPT_bez_drzew (ryc. 9).
9.6.6. Podsumowanie
Głównym celem ćwiczenia było poznanie możliwości wykorzystania chmury punktów ALS w analizie struktury zieleni miejskiej. Omówione zostały różnorodne narzędzia generowania statystyk opisowych oraz warstw po-chodnych chmury punktów, pomocnych w analizie terenów zielonych. Ćwiczenie obejmowało także zagadnie-nie generowania numerycznych modeli powierzchni terenu oraz wykonywania na ich podstawie analiz widocz-ności. Przeprowadzono symulację zmiany widoczności z określonego punktu w wyniku wycięcia grupy drzew.
Ryc. 9. Porównanie warstw widoczności wygenerowanych na podstawie oryginal-nego modelu NMPT oraz modelu zasymulowanego z usuniętymi drzewami
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

9. Zastosowania produktów LiDAR oraz przyszłość
196
9.7. Analizy 2D i 3D struktury drzewostanów gospodarczych
Ćwiczenie ma na celu poznanie możliwości wykorzystania chmury punktów ALS w analizach struktury drzewo-stanów pod kątem weryfikacji i aktualizacji warstw geometrycznych leśnej mapy numerycznej (LMN) oraz wy-branych informacji opisowych (cech taksacyjnych) z tabel bazy danych SILP. Po zakończeniu ćwiczenia, uczest-nik zdobędzie praktyczną umiejętność generowania modelu koron drzew (MKD) oraz obliczania wybranych charakterystyk drzewostanów.
Szacowany czas wykonania ćwiczenia: 45 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\10_05_LESNICTWO
• N-34-110-D-d-1-4-1.las, N-34-110-D-d-1-4-2.las, N-34-110-D-d-1-4-3.las, N-34-110-D-d-1-4-4.las – chmury punktów ALS w formacie LAS 1.2 Point Data Record Format 3;
• LMN.shp – fragment Leśnej Mapy Numerycznej (format SHP).
Obszar: okolice Włocławka
Oprogramowanie: FUSION (USDA Forest Service–Pacific Northwest Research Station), LAStools (rapidlasso GmbH), FugroViewer (Fugro Geospatial Services), ArcMap (Esri)
ETAPY REALIZACJI ĆWICZENIA
9.7.1. Wykonanie modelu koron drzew
1. W celu wygenerowania modelu koron drzew, w pierwszej kolejności zostanie przeprowadzona normali-zacja chmury punktów. Normalizacja polega na zredukowaniu wysokości bezwzględnej odbić promienia lasera (chmur punktów ALS) do wysokości względnej w stosunku do powierzchni gruntu. Utworzone zosta-ną nowe znormalizowane chmury punktów ALS zapisane w plikach z przyrostkiem „_norm”. Przystępując do normalizacji chmur punktów, w pierwszym kroku kliknij lewym przyciskiem myszy na pasek adresu w otwartym folderze z danymi LAS, wprowadź polecenie cmd i zatwierdź przyciskiem ENTER.
2. Następnie w oknie linii komend wpisz następujące polecenia, które w pierwszym kroku stworzą listę plików lista_LAS.txt, a w drugim dokonają normalizacji chmur punktów (ryc. 1):
dir/b *.las > lista_LAS.txtENTER
lasheight –lof lista_LAS.txt -replace_z -odix _normENTER
3. Otwórz w programie FugroViewer jedną z wybranych oryginalnych chmur punktów oraz odpowiadającą jej chmurę znormalizowaną (widok 3D).
4. Do wygenerowania modelu koron drzew (MKD; odpowiednik zNMPT dla warstwy roślinności wysokiej) o rozdzielczości terenowej 1,0 m użyj następującego polecenia (FUSION), wpisując je w oknie linii komend:
CanopyModel /class:2,4,5 /median:3 MKD.dtm 1 m m 0 0 0 0 *_norm.las
5. Wygenerowany model MKD.dtm został wygładzony filtrem medianowym w oknie 3 × 3 piksele (/median:3). Do generowania MKD wykorzystano punkty ALS z klasy gruntu oraz klas roślinności średniej i wysokiej
Ryc. 1. Normalizacja chmur punktów narzędziem lasheight z poziomu linii komend

9.7. Analizy 2D i 3D struktury drzewostanów gospodarczych
197
(/class:2,4,5). Wizualizację modelu MKD.dtm wykonaj w programie PDQ z pakietu FUSION (ryc. 2). Program można odnaleźć w lokalizacji C:\FUSION\pdq.exe. Po otwarciu programu wybierz File >> Open.
6. Model MKD dobrze nadaje się do weryfikacji poprawności przebiegu granic wydzieleń i innych obiektów zapisanych w bazie geometrycznej jaką jest LMN. Wykonaj konwersję do formatu ASC, aby wczytać utwo-rzony model do programu ArcMap. W tym celu wprowadź następujące polecenie w oknie linii komend:
DTM2ASCII MKD.dtm MKD.asc
7. Na podstawie plików MKD.asc oraz LMN.shp dokonaj wizualnej oceny poprawności przebiegu granic LMN w programie ArcMap. Dodaj dane do programu ArcMap, wybierając File >> Add Data >> Add Data… (ryc. 3).
Ryc. 2. Model koron drzew (MKD; ang. CHM) zwizualizowany w programie PDQ (FUSION)
Ryc. 3. Przebieg granic obiektów podstawowych LMN na tle MKD

9. Zastosowania produktów LiDAR oraz przyszłość
198
9.7.2. Wykonanie statystyk dla wydzieleń leśnych
1. Do określania wysokości drzewostanów na podstawie statystyk znormalizowanej chmury punktów ALS stosowany jest parametr 95. (ewentualnie 97.) percentyla, czyli wartość wysokości względnej, poniżej której znajduje się 95% (97%) liczby wszystkich punktów chmury ALS wewnątrz analizowanego wydzie-lenia. Odrzucane są jedynie punkty ALS będące reprezentacją najwyższych wierzchołków drzew lub błęd-nych odbić (np. przelatujących ptaków, masztów itd.). Korzystając z poniższej instrukcji, utworzona zosta-nie tabela w formacie CSV, zawierająca wybrane charakterystyki chmury punktów ALS, w tym wspomniany 95 percentyl wysokości dla poszczególnych wydzieleń zdefiniowanych w pliku wektorowym LMN.shp.
2. W pierwszej kolejności dokonaj ograniczenia plików LAS do granic wydzieleń, używając polecenia PolyClipData (FUSION). W folderze ćwiczeniowym 10_05_LESNICTWO utwórz nowy folder o nazwie wydzielenia, w którym zostaną zapisane nowo utworzone pliki. Następnie wpisz następujące polecenie w oknie linii komend:
PolyClipData /multifile /shape:36,* LMN.shpD:\Szkolenia_LiDAR\Cwiczenia\10_05_Lesnictwo\wydzielenia\ *_norm.las
Parametr /shape:36,* definiuje kolumnę w pliku LMN.shp, na podstawie której mają być nazywane nowo tworzone pliki *.las.
3. Do obliczenia statystyk chmur punktów ALS dla poszczególnych wydzieleń, wprowadź następujące polece-nia w oknie linii komend:
cd wydzieleniadir/b *.las > lista_wydzielen.txt
CloudMetrics lista_wydzielen.txt statystyki.csv
4. Następnie edytuj plik statystyki.csv w programie LibreOffice Calc zgodnie z ryciną 4. Wczytaj plik do progra-mu, wybierając Plik >> Otwórz >> statystyki.csv. W oknie Import tekstu zaznacz Opcje separatora: Prze-cinek. Po wczytaniu danych pozostaw jedynie kolumny FileTitle oraz Elev P95. Usuń wszystkie pozostałe kolumny (prawy przycisk myszy na nazwie kolumny >> Usuń kolumny). Wprowadź nazwę nowej kolum-ny w komórce C1=wydzielenia. Następnie w komórce C2 wprowadź następującą formułę: =MID(A2;2;10). Podana formuła zwróci w komórce C2 ciąg znaków będących identyfikatorem danego wydzielenia leśne-go. Analogicznie zastosuj formułę dla wszystkich wierszy w kolumnie C. Zapisz zmiany dokonane w pliku statystyki.csv (Plik >> Zapisz) i zamknij program LibreOffice Calc.
5. Tak edytowany plik statystyki.csv można połączyć z tabelą atrybutów pliku LMN.shp w celu porównania wyso-kości zawartej w LMN (height) z wysokością otrzymaną z analizy chmur punktów ALS (Elev P95). W tym celu wczytaj plik SHP do programu ArcMap, a następnie po kliknięciu prawym przyciskiem myszy na warstwę LMN.shp użyj polecenia Joins and Relates >> Join… W oknie Join Data ustaw parametry zgodnie z ryc. 5.
Ryc. 4. Edycja pliku statystyki.csv

9.7. Analizy 2D i 3D struktury drzewostanów gospodarczych
199
9.7.3. Szacowanie wysokości drzew oraz zwarcia drzewostanu
1. W programie FUSION możliwe jest także wygenerowanie warstw rastrowych reprezentujących wybrane cechy taksacyjne i parametry drzewostanu dla zadanej wielkości komórki rastra. Wykonując poniższe pole-cenia, w pierwszym kroku (GridSurfaceCreate) generowana jest powierzchnia gruntu NMT.dtm, a w drugim (GridMetrics) utworzony zostanie plik rastrowy z rozmiarem piksela 10,0 m, reprezentujący 95 percentyl wysokości analizowanych drzewostanów.
2. W poleceniu GridSurfaceCreate wykorzystywana jest lista plików lista_LAS.txt, utworzona na początku ćwiczenia. W pierwszym kroku wróć do folderu 10_05_Lesnictwo, wpisując poniższe polecenie w oknie linii komend:
cd ..
a następnie wpisz polecenia:GridSurfaceCreate /median:3 /class:2 NMT.dtm 1 m m 0 0 0 0 lista_LAS.txt
GridMetrics /raster:p95 NMT.dtm 5 10 metrics lista_LAS.txt
3. Dokonaj konwersji pliku metrics_all_returns_all_metrics_elevation_p95.dtm do formatu ASCII, wpisując po-niższe polecenie w oknie linii komend:
DTM2ASCII metrics_all_returns_all_metrics_elevation_p95.dtm 95p.asc
4. W celu określenia zwarcia poziomego warstwy koron drzew, zastosuj polecenie Cover (FUSION), które ob-licza tę cechę jako stosunek liczby odbić lasera powyżej zadanego progu wysokości (+5 m) do wszystkich odbić w granicach piksela o zadanym rozmiarze – 10.0 m. Wpisz następujące polecenie w oknie linii komend:
Cover NMT.dtm Cover.dtm 5 10 m m 0 0 0 0 lista_LAS.txt
5. Następnie konwertuj plik Cover.dtm do formatu ASCII, wpisując poniższe polecenie w oknie linii komend:DTM2ASCII Cover.dtm Cover.asc
6. W kolejnym kroku wczytaj nowo utworzone warstwy (95p.asc; Cover.asc) do programu ArcMap (File Add Data >> Add Data…). Zostaną one wyświetlone w oknie ArcMap (ryc. 6).
Ryc. 5. Połączenie tabeli atrybutów pliku LMN.shp z plikiem statystyki.csv

9. Zastosowania produktów LiDAR oraz przyszłość
200
9.7.4. Wykrycie wierzchołków drzew
1. Pakiet FUSION posiada m.in. narzędzie CanopyMaxima, pozwalające wykrywać pojedyncze korny drzew, szczególnie w jednopiętrowych drzewostanach iglastych średnich i starszych klas wieku. Narzędzie wyko-rzystuje zależność pomiędzy wysokością drzewa a średnicą korony. Lokalne maksima wysokości są identy-fikowane za pomocą ruchomego okna o zmiennej wielkości, dopasowującego się w zależności od warto-ści wysokości MKD. W celu utworzenia warstwy wierzchołków drzew wpisz następujące poleceni w oknie linii komend:
CanopyMaxima /res:1 /img24 MKD.dtm wierzcholki
2. Utworzona zostanie warstwa rastrowa wierzcholki_maxima.bmp, reprezentująca lokalizację lokalnych mak-simów (kolor czerwony) i minimów (kolor niebieski), a także tabela wierzcholki_treelist.csv, zawierająca m.in. informacje o wysokości poszczególnych drzew, ich lokalizacji oraz minimalnej i maksymalnej szerokości korony. Możesz otworzyć utworzone pliki w eksploratorze Windows.
3. Wyświetl wierzchołki drzew w programie ArcMap, korzystając z informacji o współrzędnych X, Y zawar-tych w pliku wierzcholki_treelist.csv. Użyj w tym celu polecenia Add XY Data (File >> Add Data >> Add XY Data…). Wizualizację wierzchołków drzew wykonaj z użyciem pliku MKD.asc jako warstwy tła (ryc. 7). Do poprawy jakości wizualizacji, można dodatkowo wygenerować warstwę tzw. cieniowanego reliefu przy użyciu narzędzia Hillshade (3D Analyst Tools >> Raster Surface >> Hillshade). Warstwę Hillshade.tif wy-świetl z przezroczystością 50% (Layer Properties >> Display >> Transparency).
Ryc. 6. Warstwy wysokości (95p.asc) oraz zwarcia (Cover.asc), zwizualizowane w programie ArcMap
Ryc. 7. Wynik detekcji wierzchołków drzew

9.7. Analizy 2D i 3D struktury drzewostanów gospodarczych
201
9.7.5. Analiza powierzchni i objętości koron drzew
1. Korzystając z narzędzia GridSurfaceStats (FUSION), możliwe jest utworzenie warstw rastrowych reprezentujących powierzchnię koron drzew oraz objętość przestrzeni znajdującej się pod powierzchnią koron. Korzystając z poniższego polecenia, utwórz wspomniane warstwy (korony_surface_area.asc, korony_surface_volume.asc) w rozdzielczości 10,0 m:
GridSurfaceStats /ascii /area MKD.dtm korony 10
2. Następnie zwizualizuj je w programie ArcMap (File >> Add Data >> Add Data…).
9.7.6. Podsumowanie
Ćwiczenie obejmowało zagadnienia związane z generowaniem statystyk opisowych oraz warstw pochodnych chmury punktów ALS, pod kątem aktualizacji Leśnej Mapy Numerycznej. Na wstępie utworzono model koron drzew ze znormalizowanych chmur punktów. Następnie określono wysokość pojedynczych drzewostanów z wykorzystaniem 95. percentyla wysokości punktów i porównano otrzymane wartości z wysokościami za-wartymi w LMN. W kolejnym etapie utworzono warstwy rastrowe o rozdzielczości 10,0 m, reprezentujące wy-sokość oraz zwarcie drzewostanu. Ćwiczenie obejmowało także generowanie warstwy SHP reprezentującej wierzchołki pojedynczych drzew. W ostatnim etapie oszacowano powierzchnię koron i utworzono warstwę rastrową o rozdzielczości 10,0 m, reprezentującą objętość przestrzeni pod powierzchnią koron drzew.
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

9. Zastosowania produktów LiDAR oraz przyszłość
202
9.8. Generowanie prawdziwej ortofotomapy
Po wykonaniu tego ćwiczenia uczestnik szkolenia LiDAR nabędzie umiejętność tworzenia prawdziwej ortofo-tomapy (true ortho) z wykorzystaniem chmury punktów ALS oraz zdjęć lotniczych.
Szacowany czas wykonania ćwiczenia: 45 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\10_06_TERRA
• Zory_1992.dgn – plik DGN z wygenerowanymi modelami budynków 3D;• M-34-62-C-d-2-3-3-4.las – sklasyfikowana chmura punktów ALS w formacie LAS 1.2 Point Data
Record Format 3;• 17_1302.tif, 17_1303.tif, 17_1304.tif, 17_1305.tif, 18_1360.tif, 18_1361.tif, 18_1362.tif, 18_1363.tif –
zdjęcia lotnicze w formacie TIFF, o rozdzielczości 10 cm;• 1992.txt – plik TXT z definicją układu współrzędnych PL-1992;• Mission – folder zawierający niezbędne pliki do aplikacji TerraPhoto takie jak:
− cam.cal- plik kalibracji kamery; − mission.mis – plik tzw. misji czyli projektu fotogrametrycznego; − images.iml – plik zdjęć przed wyrównaniem; − images_dobra.iml – plik zdjęć po wyrównaniu; − tp.tpt – plik z punktami wiążącymi (tie point).
Obszar: miasto Żory
Oprogramowanie: MapPowerView (Bentley), TerraScan (Terrasolid), TerraPhoto (Terrasolid)
ETAPY REALIZACJI ĆWICZENIA
9.8.1. Wstępne ustawienia: wczytanie danych oraz nadanie układu współrzędnych
1. W celu wczytania danych otwórz plik *.dgn, w którym znajdują się wygenerowane modele budynków 3D (dachy – warstwa nr 6 oraz ściany – warstwa nr 7). Aplikacje TerraScan i TerraPhoto zostaną uruchomio-ne automatycznie.
2. Pierwszym etapem prac jest nadanie układu współrzędnych oraz założenie projektu w aplikacji TerraPhoto. W tym celu rozwiń pasek narzędziowy Settings (ryc. 1), następnie zaznacz okno User projection system i za pomocą funkcji Paste wklej skopiowane parametry układu PL-1992 z pliku tekstowego PL-1992.txt.
Ryc. 1 Pasek Settings aplikacji TerraPhoto (po lewej) i okno ustawień układu współrzędnych (po prawej)

9.8. Generowanie prawdziwej ortofotomapy
203
3. W kolejnym kroku wczytaj do aplikacji TerraScan sklasyfikowaną chmurę punktów ALS w formacie LAS File >> Read points.
9.8.2. Utworzenie projektu fotogrametrycznego
1. W celu stworzenia nowego projektu załóż tzw. misję, czyli projekt fotogrametryczny, w oknie TerraPhoto: Mission >> New mission (ryc. 2).
2. Następnie wskaż ścieżki zapisu dla plików tymczasowych oraz zdjęć zrektyfikowanych i wynikowych (ryc. 3; nr 1).
3. W kolejnym kroku otwórz okno definiowania kamery za pomocą przycisku Add (ryc. 3; nr 2) i wskaż plik kamery cam.cal (ryc. 4; nr 1) oraz ścieżkę do pliku, w którym znajdują się zdjęcia lotnicze przed wyrówna-niem – zakładka Image directories (ryc. 4; nr 2).
Ryc. 2. Utworzenie projektu fotogrametrycznego w aplikacji TerraPhoto
Ryc. 3. Ustawienia podczas tworzenia misji czyli projektu fotogrametrycz-nego w aplikacji TerraPhoto
1
2

9. Zastosowania produktów LiDAR oraz przyszłość
204
4. Przyciskiem OK zatwierdź wprowadzone dane, a następnie zapisz utworzoną misję na dysku lokalnym za pomocą polecenia Mission >> Save mission as.
5. W oknie TerraPhoto: Images >> Load list otwórz listę bloku zdjęć, zapisaną w pliku images.iml.
6. Wczytaj punkty, na podstawie których została wymodelowana powierzchnia terenu (NMT) do misji foto-grametrycznej – okno TerraPhoto: Points >> Load from TerraScan i wybierz tylko punkty z klasy 2 – ground (ryc. 5).
9.8.3. Utworzenie miniaturek obrazów i wstępna korekcja tonalna zdjęć
1. W celu utworzenia miniaturek poszczególnych obrazów, w oknie TerraPhoto wybierz Utility >> Create thumbnails (ryc. 6).
Ryc. 4. Okno definiowania kamery w aplikacji TerraPhoto
1
2
Ryc. 5. Wczytanie chmury punktów do aplikacji TerraPhoto: Points >> Load from TerraScan (po lewej) oraz wybór klasy 2 – ground podczas ładowania chmury punktów (po prawej)

9.8. Generowanie prawdziwej ortofotomapy
205
2. W celu wstępnego tonalnego dopasowania zdjęć, wykonaj polecenie w oknie TerraPhoto: Image >> Define Color Corrections (ryc. 7). Za pomocą tego narzędzia można poprawić kontrast, jasność czy nasyce-nie wszystkich wczytanych zdjęć.
3. Po wywołaniu polecenia korekcji tonalnej pojawi się okno, w którym zmień parametry wyświetlania obra-zów, takie jak liczba kolumn i wierszy czy powiększenie obrazów za pomocą opcji Display (ryc. 8).
Ryc. 6. Utworzenie miniaturek obrazów w aplikacji TerraPhoto: Utility >> Create thumbnails
Ryc. 7. Wstępne tonalne dopasowanie zdjęć w aplikacji TerraPhoto: Images>> Define color corrections

9. Zastosowania produktów LiDAR oraz przyszłość
206
4. Po zakończeniu wstępnej korekcji zapisz plik z listą obrazów wybierając z okna TerraPhoto: Images >> Save list.
9.8.4. Aerotriangulacja bloku zdjęć
1. W kolejnych krokach przeprowadzona zostanie aerotriangulacja bloku zdjęć na podstawie pomierzonych punktów wiążących – Tie points oraz punktów terenowych o znanych współrzędnych – Known points.
2. Wyświetl plik z pomierzonymi punktami *.tpt, wywołując polecenie w oknie TerraPhoto: Images >> Define tie points a następnie File >> Open. Na podstawie tych punktów przeliczone zostały parametry aerotrian-gulacji, a następnie wykonane zostało wyrównanie bloku zdjęć.
3. W celu realizacji dalszej części ćwiczenia, wczytaj listę zdjęć po wyrównaniu Images >> Load list; tym razem wybierz plik images_dobre.iml.
4. Właściwa korekcja tonalna obrazów odbywa się z wykorzystaniem polecenia Rectify >> Define color points (ryc. 9).
5. W ustawieniach należy podać:• rozmiar piksela wynikowej ortofotomapy (ryc. 10; nr 1);• współczynnik skali dla punktów kontrolnych (domyślny);• maksymalny bok trójkątów tworzących model korekcji (domyślny);
Ryc. 8. Wybór sposobu wyświetlania zdjęć oraz dopasowanie kontrastu i jasności zdjęć z wykorzystaniem funkcji Definy color correction (TerraPhoto)
Ryc. 9. Właściwa korekcja tonalna obrazów w aplikacji TerraPhoto: Rectify >> Define color points

9.8. Generowanie prawdziwej ortofotomapy
207
• warstwy, na których umieszczone są elementy graficzne wykorzystywane przy tworzeniu prawdziwej ortofotomapy (ryc. 10; nr 2).
6. Punkty kontrolne korekcji tonalnej, tzw. Color points oraz linie łączenia, tzw. Seamlines, wyświetl w oknie Color points: View >> Display mode (ryc. 11). Punkty korekcji można wyszukać w sposób automatyczny File >> Search points lub edytować manualnie: Point >> Add\Delete. Ze względu na ograniczony czas ćwiczenia wstaw punkty korekcji tonalnej w sposób manualny, w miejscach o widocznej różnicy tonalnej.
7. W niezbędnych miejscach można wstawić poligony, wskazujące obraz mający zostać użyty do ortorektyfi-kacji treści zawartej wewnątrz narysowanego wieloboku – okno Color points: Image >> Place selection\Paint selection (ryc. 12). Funkcją Place selection rysujemy wielobok, wewnątrz którego ma zostać wyko-rzystane inne wskazane zdjęcie, natomiast wykorzystując funkcję Paint selection używamy tzw. pędzla, wewnątrz którego chcemy wkleić fragment z innego wskazanego zdjęcia. W zależności od miejsca, które wymaga poprawy, należy wybrać jedną z powyższych funkcji.
8. W przypadku wprowadzenia zmian plik należy zapisać w oknie Color points: File >> Save as.
Ryc. 10. Ustawienia podczas korekcji tonalnej wyrów-nanych zdjęć z wykorzystaniem Color point settings
(TerraPhoto)
1
2
Ryc. 11. Wyświetlanie punktów korekcji tonalnej Color points i linii łączeń Seamlines
Ryc. 12. Sposób korekcji linii łączeń zdjęć w aplikacji TerraPhoto

9. Zastosowania produktów LiDAR oraz przyszłość
208
9.8.5. Utworzenie ramek podziału na arkusze ortofotomapy
1. Ostatecznym etapem jest wygenerowanie prawdziwej ortofotomapy. W pierwszej kolejności utwórz ramki podziału na wynikowe arkusze ortofotomapy. W tym celu wybierz TerraPhoto: Rectify >> Place tile array (ryc. 13).
2. Następnie określ parametry takie jak rozmiar ramek, wielkość piksela czy sposób numeracji arkuszy (miej-sca do uzupełnienia zaznaczono na ryc. 14).
9.8.6. Wygenerowanie wynikowej prawdziwej ortofotomapy lotniczej
1. Polecenie generowania prawdziwej ortofotomapy wybierz z okna TerraPhoto: Rectify >> Rectify mosaic (ryc. 15), zaznaczając wcześniej ramki (narzędziem Select w Bentley Map PowerView), na które mają być podzielone wynikowe ortofotomapy. W ustawieniach wybierz:• rozmiar piksela wynikowej ortofotomapy (0,10 m),• formę nazewnictwa plików (należy wybrać Automatic numberic, jako prefix wykorzystać tile, a jako
pierwszy numer wskazać 1),• format pliku wynikowego (GeoTIFF).
2. Dodatkowo należy wskazać modele 3D budynków (w miejscu Use Surface objects) i wskazać numery warstw pliku DGN 6 i 7, na których się one znajdują. Zatwierdzamy przyciskiem OK.
Ryc. 13. Tworzenie ramek dla wynikowej ortofotomapy w aplikacji TerraPhoto: Rectify >> Place tile array
Ryc. 14. Wybór parametrów podczas two-rzenie ramek dla wynikowej ortofotomapy w aplikacji TerraPhoto: Rectify >> Place
Tile array

9.8. Generowanie prawdziwej ortofotomapy
209
3. Wynikowe ortofotomapy zostaną zapisane w lokalizacji, która była wskazywana podczas tworzenia misji.
4. Po zakończeniu procesu ortorektyfikacji należy sprawdzić poprawność wygenerowanych ortofotomap. W tym celu należy je wczytać poleceniem Raster Manager >> Attach>> Raster (ryc. 16, ryc. 17) i sprawdzić wizualnie (ryc. 18).
Ryc. 15. Ustawienie parametrów wynikowej ortofotomapy prawdziwej w aplikacji TerraPhoto: Rectify >> Rectify mosaic
Ryc. 16. Pasek narzędziowy Raster Manager
Ryc. 17. Polecenie wczytania rastrów Attach>>Raster do programu MicroStation
Ryc. 18. Fragment wynikowej ortofotomapy prawdziwej

9. Zastosowania produktów LiDAR oraz przyszłość
210
9.8.7. Podsumowanie
Ćwiczenie polegało na wykonaniu prawdziwej ortofotomapy na podstawie zdjęć lotniczych, sklasyfikowanej chmury punktów oraz wygenerowanych wcześniej modeli budynków. W pierwszych etapach dokonano nie-zbędnych ustawień aplikacji, założono projekt fotogrametryczny, tzw. misję zdjęć i dokonano korekcji tonalnej obrazów. Następnie wczytano wyrównaną listę zdjęć i zaplanowano podział na wynikowe moduły ortofotoma-py. Końcowym etapem było wygenerowanie ortofotomapy rzeczywistej o pikselu równym 0,10 m.
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

9.9. Analiza ruchów masowych
211
9.9. Analiza ruchów masowych
Ruchy masowe są to przemieszczenia materiału skalnego w dół stoku pod wpływem siły grawitacji. Dane LiDAR pozwalają na dokładną analizę tych złożonych zjawisk. Analizy w toku ćwiczenia obejmą tworzenie modelu różnicowego oraz określenie objętości mas ziemnych, jaka uległa osunięciu.
Szacowany czas wykonania ćwiczenia: 45 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\10_07_RUCHY_MASOWE
• 2010_04.tif – numeryczny model przedstawiający stok przed osunięciem się ziemi. Dane pocho-dzą z zasobów Państwowego Instytutu Geologicznego – PIB. Aktualność danych: kwiecień 2010 r., format danych TIFF, rozdzielczość 0,2 m;
• 2011_11.tif – numeryczny model terenu przedstawiający stok po osunięciu się ziemi. Dane pocho-dzą z zasobów Państwowego Instytutu Geologicznego – PIB. Aktualność danych: listopad 2011 r., format danych TIFF, rozdzielczość 0,5 m;
• 2010_04_hillshade.tif, 2011_11_ hillshade.tif – warstwy cieniowanej rzeźby terenu (hillshade), wy-generowane odpowiednio z plików numerycznego modelu terenu;
• Obrys_osuwiska.shp – plik wektorowy zawierający obrys terenu objętego ruchami mas ziemnych;• 10_07_RUCHY_MASOWE.mxd – projekt programu ArcMap zawierający wczytane powyższe warstwy.
Obszar: Wola Kurowska
Oprogramowanie: ArcMap (ArcGIS)
ETAPY REALIZACJI ĆWICZENIA
9.9.1. Rozpoczęcie pracy
1. Uruchom przygotowany projekt 10_07_RUCHY_MASOWE.mxd, znajdujący się w folderze 10_07_RUCHY_MASOWE.
2. W oknie aplikacji ArcMap znajdują się warstwy rastrowe numerycznego modelu terenu (2010_04.tif, 2011_11.tif) oraz cieniowanej rzeźby terenu (2010_04_hillshade.tif, 2011_11_ hillshade.tif). Warstwy NMT oraz cieniowanej rzeźby są pogrupowane (ryc. 1).
Ryc. 1. Zgrupowane warstwy rastrowe

9. Zastosowania produktów LiDAR oraz przyszłość
212
3. W celu lokalizacji terenu osuwiskowego porównaj poprzez włączanie i wyłączanie warstwy 2010_04_hillshade.tif cieniowaną rzeźbę terenu w dwóch okresach czasowych. Podczas analizy wzrokowej obu warstw zauważyć można, iż w środkowej części terenu analizy zaznacza się teren osuwiskowy (ryc. 2).
9.9.2. Wykonanie różnicowego modelu NMT
1. Model różnicowy, wykonany na podstawie NMT z dwóch okresów czasowych, pozwoli określić ilościowe zmiany wysokościowe (składowa Z), jakie zaszły podczas wystąpienia zjawiska osunięcia się mas ziemnych.
2. W celu wykonania modelu różnicowego, z okna narzędziowego (ArcToolbox) wybierz narzędzie Minus, znajdujące się w zestawie narzędzi Spatial Analyst Tools (ryc. 3).
3. Po uruchomieniu narzędzia Minus wprowadź:• warstwę, która będzie odjemną różnicy (ryc. 4; nr 1);• warstwę, która będzie odjemnikiem różnicy (ryc. 4; nr 2);• warstwę wynikową różnicy (ryc. 4; nr 3) w postaci pliku o nazwie NMT_Minus.tif.
Ryc. 2. Lokalizacja terenu osuwiskowego
Ryc. 3. Lokalizacja narzędzia Minus

9.9. Analiza ruchów masowych
213
4. Po uruchomieniu narzędzia, warstwa wynikowa zostanie automatycznie dodana do programu. W celu umożliwienia wzrokowej interpretacji wyników, zmień kolorystykę warstwy (dwukrotne kliknięcie przyci-skiem myszy na nazwę warstwy, a następnie zakładka Symbology), zgodnie z poniższą ryciną (ryc. 5).
5. Wartości ujemne w warstwie modelu róznicowego oznaczają osunięcie się terenu (zmniejszenie się wy-sokości terenu w danym miejscu), natomiast wartości dodatnie pozwalają zauważyć obszary osunięte, w których masy ziemne zatrzymały się (zwiększenie się wysokości terenu w danym miejscu). Model rózni-cowy pozwala także na przeanalizowanie kierunku przesuwania się mas ziemnych.
9.9.3. Detekcja obszarów objętych ruchami mas ziemnych na podstawie otrzymanych różnic wysokościowych
1. Otrzymany model różnicowy może posłużyć do detekcji obszarów o największej różnicy wysokości, które następnie zweryfikowane zostaną jako miejsca potencjalnych (wymagających oceny) osuwisk terenu. W celu wykonania detekcji usuń z warstwy rastrowej komórki, których wartości nie klasyfikują się jako tereny osuwiskowe. Dla niniejszego ćwiczenia przyjęty zostanie próg 0,5 metra.
2. W tym celu posłuż się funkcją Set Null, znajdującą się w grupie narzędzi Conditional zestawu narzędziowe-go Spatial Analyst Tools (ryc. 6).
Ryc. 4. Okno parametrów narzędzia Minus
1
2
3
Ryc. 5. Warstwa modelu różnicowego ze zmodyfi-kowana kolorystyką.
Ryc. 6. Lokalizacja narzędzia Set Null

9. Zastosowania produktów LiDAR oraz przyszłość
214
3. Po uruchomieniu narzędzia Set Null, wprowadź następujące parametry (ryc. 7):• warstwę rastrową modelu różnicowego (ryc. 7; nr 1);• warunek określający, jakie komórki mają zostać zdefiniowane jako NoData (ryc. 7; nr 2);• warstwa, która ma zostać użyta w przypadku niespełnienia powyższego warunku (ryc. 7; nr 3);• warstwa wynikowa (ryc. 7; nr 4) w postaci pliku o nazwie NMT_Minus_setNull.tif.
4. Po uruchomieniu narzędzia, powstanie warstwa rastrowa przedstawiająca model różnicowy z usuniętymi wartościami z przedziału (-0.5, +0.5). Nadaj tej warstwie przeźroczystość równą 45% (dwukrotne kliknięcie przyciskiem myszy na nazwę warstwy, a następnie zakładka na tle warstwy 2010_04_hillshade.tif w celu identyfikacji potencjalnych obszarów, w których miał miejsce proces ruchu mas ziemnych (ryc. 8).
9.9.4. Automatyczne obrysowywanie obszarów objętych ruchami masowymi
1. W wielu procesach analitycznych istnieje możliwość wykorzystania danych nie tylko w formacie rastrowym, ale także jako dane wektorowe. Poniżej zaprezentowany zostanie algorytm zmiany formatu danych warstw modelu różnicowego, a następnie jego wektoryzacja. W pierwszej części ćwiczenia otrzymaną w poprzed-nim punkcie warstwę modelu różnicowego poddaj zmianie formatu liczbowego. Powodem takiego działa-nia jest fakt, iż warstwa rastrowa w formacie zmiennoprzecinkowym nie może zostać poddana wektoryzacji wprost. Musi nastąpić jej zamiana na format liczb całkowitych.
2. W celu zmiany formatu liczbowego warstwy uruchom narzędzie Int znajdujące się w grupie narzędzi Math zestawu narzędziowego Spatial Analyst Tools (ryc. 9).
Ryc. 7. Parametry narzędzia Set Null
1
2
3
4
Ryc. 8. Warstwa modelu róznicowego z usunięty-mi wartościami (-0.5, +0.5)

9.9. Analiza ruchów masowych
215
3. Po wywołaniu narzędzia INT wstaw następujące atrybuty:• wejściowa warstwa rastrowa NMT_Minus_setNull.tif (ryc. 10; nr 1);• wyjściowa warstwa rastrowa NMT_Minus_setNull_integer.tif (ryc. 10; nr 2).
4. Po uruchomieniu narzędzia otworzona zostanie nowa warstwa, której wartości komórek zamienione zosta-ną z liczb zmiennoprzecinkowych (ryc. 11A) na całkowite (ryc. 11B). Różnica w rastrowej warstwie zmienno-przecinkowej i całkowitej widoczna jest w zapisie wartości pikseli. Piksele warstwy zmiennoprzecinkowej zapisane są w formacie float (np. 4,89), natomiast piksele warstwy całkowitej są zaokrąglane (np. 5).
5. Po wykonaniu zamiany formatu liczbowego warstwy rastrowej, można przeprowadzić automatyczną jej wektoryzację. W tym celu zlokalizuj i uruchom narzędzie Raster to Polygon, znajdujące się w grupie narzę-dzi From Raster zestawu narzędziowego Conversion Tools (ryc. 12).
Ryc. 9. Lokalizacja narzędzia Int
Ryc. 10. Parametry narzędzia Int
1
2
Ryc. 11. Różnica w wyświetlaniu warstwy z wartościami zmiennoprzecin-kowymi (A) oraz całkowitymi (B)
A B

9. Zastosowania produktów LiDAR oraz przyszłość
216
6. Uruchamiając powyższe narzędzie, wprowadź następujące parametry:• warstwę rastrową wejściową: NMT_Minus_setNull_integer.tif (ryc. 13; nr 1);• warstwę wektorową wyjściową: osuwiska_wektor.shp (ryc. 13; nr 2);• wyłączoną opcję generalizowania poligonów (ryc. 13; nr 3).
7. Po uruchomieniu narzędzia utworzona zostanie warstwa wektorowa przedstawiająca miejsca o największej wartościach różnicowego modelu terenu, które zapisane zostały w tabeli atrybutów w polu GRIDCODE (aby wejść do tabeli atrybutów warstwy, należy kliknąć nazwę warstwy przy pomocy prawego klawisza myszy, a następnie wybrać opcję Open Attribute Table).
9.9.5. Analiza wolumetryczna
1. Przed przystąpieniem do analizy wolumetrycznej wczytaj (Add Data) do projektu plik wektorowy Obrys_osuwiska.shp.
2. W celu wykonania analizy wolumetrycznej, oznaczającej określenie objętości mas ziemnych usuniętych lub dodanych w dane miejsce, wykorzystaj narzędzie CutFill, znajdujące się w grupie narzędzi Surface w zesta-wie narzędziowym Spatial Analyst Tools (ryc. 14). Funkcja ta tworzy nową warstwę rastrową, która jest po-dzielona na trzy klasy: pierwsza symbolizuje obszary gdzie przybyło materiału, druga – w której nie zaszły żadne zmiany oraz trzecia, obrazująca miejsca z ubytkiem mas ziemnych.
Ryc. 12. Lokalizacja narzędzia Raster to Polygon
Ryc. 13. Parametry narzędzia Raster to Polygon
1
2
3

9.9. Analiza ruchów masowych
217
3. Uruchom narzędzie CutFill i wprowadź następujące parametry:• warstwa rastrowa przedstawiająca NMT z początku analizy – 2010_04.tif (ryc. 15; nr 1);• warstwa rastrowa przedstawiająca NMT z końca analizy – 2011_11.tif (ryc. 15; nr 2);• warstwa wynikowa w postaci pliku CutFill.tif (ryc. 15; nr 3).
• naciśnij przycisk Environments – ustawienia środowiskowe. Następnie z rozwiniętej zakładki Raster Analysis w polu Mask wybrierz z listy rozwijalnej wczytany do programu plik wektorowy Obrys_osuwi-ska.shp (ryc. 16). Ustawianie maski ma na celu ograniczenie analiz tylko do wybranego fragmentu, okre-ślonego w tym przypadku warstwą wektorową. Podczas wykonywana analizy wolumetrycznej chcemy określić przesunięcie mas ziemnych tylko w obrębie zwałowiska, nie zaś dla całego zasięgu warstw ra-strowych, stąd pomocne staje się ustawienie maski.
Ryc. 14. Lokalizacja narzędzi CutFill
Ryc. 15. Parametry narzędzia CutFill
1
2
3
Ryc. 16. Ustawienie maski

9. Zastosowania produktów LiDAR oraz przyszłość
218
• Po wybraniu pliku wektorowego zamknij ustawienia środowiskowe poprzez przycisk OK, a następnie w oknie CutFill zatwierdź ustawienia przyciskiem OK.
4. Po zakończeniu pracy algorytmu, do okna widoku ArcMap automatycznie dodana zostanie warstwa rastro-wa CutFill.tif, zawierająca sklasyfikowane (według symboliki zaprezentowanej na poniższej rycinie) objęto-ści mas ziemnych (ryc. 17).
5. W tabeli atrybutów (aby wejść do tabeli atrybutów warstwy, należy kliknąć nazwę warstwy przy pomocy prawego klawisza myszy, a następnie wybrać opcję Open Attribute Table) nowo powstałej warstwy Cut-Fill.tif istnieje możliwość odczytania objętości mas ziemnych, które ubyły (kolumna VOLUME, wartości ze znakiem minus) oraz tych, które przybyły (kolumna VOLUME, wartości ze znakiem plus), w odniesieniu do obszaru określonego w kolumnie AREA.
6. W celu obliczenia całkowitej objętości ruchu mas ziemnych, do tabeli atrybutów warstwy CutFill.tif dodaj kolumnę o nazwie MZ poprzez:• naciśnięcie przycisku Table Options (ryc. 18; nr 1);• wybranie opcji Add Field (ryc. 18; nr 2);• wpisanie w nowo otwartym oknie nazwy kolumny (ryc. 18; nr 3);• wybranie typu danych przechowywanych w tej kolumnie (ryc. 18; nr 4).
Ryc. 17. Mapa wynikowa narzędzia CutFill
Ryc. 18. Procedura tworzenia nowej kolumny w tabeli atrybutów
1
2 34

9.9. Analiza ruchów masowych
219
7. Nowo utworzona kolumna będzie posiadać dwie wartości. Wartość 1 dla objętości (kolumna VOLUME) mniejszych od zera oraz wartość 2 dla objętości większych od zera. W celu uzupełnienia kolumny MZ powyż-szymi wartościami, wybierz obszary, dla których objętość jest mniejsza od wartości zero (masy które ubyły):• naciśnij przycisk Table Options (ryc. 19; nr 1);• wybierz opcję Select by Attributes… (ryc. 19; nr 2);• w nowo otwartym oknie wstaw formułę „VOLUME” < 0 (ryc. 19; nr 3);• naciśnij przycisk Apply (ryc. 19; nr 4).
8. Po wyselekcjonowaniu wszystkich rekordów w tabeli atrybutów, które posiadają wartości objętości mniej-sze niż zero, przystąp do procedury wstawienia w kolumnie MZ wartości 1:• naciśnij prawym przyciskiem myszy na nagłówek kolumny MZ a następnie wybrać opcję Field
Calculator… (ryc. 20; nr 1);• w nowo otwartym oknie Field Calculator, wstaw wartość 1 (ryc. 20; nr 2);• zatwierdź przyciskiem OK (ryc. 20; nr 3).
9. Po wstawieniu do tabeli atrybutów, w kolumnie MZ wartości 1, pozostałe rekordy przyjmą wartość 2. W tym celu:• naciśnij przycisk Table Options (ryc. 21; nr 1);• wybierz opcję Switch Selection (ryc. 21; nr 2);
Ryc. 19. Selekcja atrybutowa
1
2
4
Ryc. 20. Wstawianie wartości 1 do kolumny MZ
3
1 2
3

9. Zastosowania produktów LiDAR oraz przyszłość
220
• wstaw do wyselekcjonowanych rekordów wartość 2 (ryc. 21; nr 3) według procedury identycznej jak w przypadku poprzedniej części ćwiczenia (punkt 8 powyżej);
• zatwierdź okno wprowadzania danych przy pomocy przycisku OK (ryc. 21; nr 4).
10. Po wykonaniu powyższych operacji, tabela atrybutów warstwy CutFill.tif posiada dodatkową kolumnę MZ, w której zawiera się podział na ubytek oraz przyrost mas ziemnych. Końcowym etapem analizy będzie wy-konanie sumowania objętości w rekordach z atrybutem 1 oraz 2 kolumnie MZ. W celu przeprowadzenia su-mowania:• usuń selekcję przy pomocy przycisku Clear Selection (ryc. 22; nr 1);• naciśnij prawym przyciskiem myszy na nagłówek kolumny MZ, a następnie wybierz opcję Summarize…
(ryc. 22; nr 2);• wybierz parametry VOLUME oraz Sum (ryc. 22; nr 3);• określ ścieżkę zapisu nowej tabeli z wartościami sumarycznymi oraz nazwę tabeli jako MZ_Suma.dbf
(ryc. 22; nr 4).
Ryc. 21. Wstawianie wartości 2 do kolumny MZ
1
23
4
Ryc. 22. Sumowanie atrubytów
1
2 3
4

9.9. Analiza ruchów masowych
221
11. Po uruchomieniu narzędzia zostanie utworzona nowa tabela MZ_Suma.dbf, która dodana zostanie do widoku mapy. W przypadku pojawienia się komunikatu z pytaniem o dodanie powstałej tabeli do progra-mu, wciśnij przycisk Yes.
12. Tabela atrybutów (ryc. 23) zawiera sumę policzoną według kategorii z pola MZ. W celu wyświetlenia tabeli atrybutów warstwy, należy kliknąć nazwę warstwy przy pomocy prawego klawisza myszy, a następnie wybrać opcję Open Attribute Table. Kolumna MZ zawiera wartości całkowitych objętości mas ziemnych, jakie uległy przemieszczeniu. Według tabeli, ubyło 3425,16 m3 ziemi, natomiast przybyło 3545,23 m3.
9.9.6. Podsumowanie
Celem ćwiczenia była detekcja ruchów masowych na wybranym obszarze poprzez utworzenie modelu różni-cowego dla dwóch numerycznych modeli terenu wykonanych przed i po osunięciu się mas ziemnych. Wyko-nano również selekcję oraz obliczono objętość mas ziemnych jakie uległy przemieszczeniu.
Ryc. 23. Tabela sumy przemieszczo-nych mas ziemnych
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

9. Zastosowania produktów LiDAR oraz przyszłość
222
9.10. Modelowanie przebiegu rzek z wykorzystaniem linii nieciągłości terenu
W niniejszym ćwiczeniu zostaną wykonane linie nieciągłości ternu dla modelu przebiegu rzeki Dunajec. Korzy-stając z danych pochodzących z lotniczego skanowania laserowego, uczestnik szkolenia wykona wektoryzację na podstawie zadań nadawania wartości wysokości plikom SHP. Finalnie wykonany model zostanie zwizualizo-wany z wykorzystaniem właściwości warstwy danych LiDAR (LAS Layer).
Szacowany czas wykonania ćwiczenia: 45 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\10_08_RZEKI
• Dunajec.las – sklasyfikowana chmura LiDAR w formacie LAS 1.2 Point Data Record Format 3;• M-34-90-A-b-1-4.tif oraz 34-90-A-b-2-3.tif – 2 arkusze ortofotomapy w foramcie TIFF, o rozdzielczo-
ści 10 cm, znajdujące się w obszarze danych Dunajec.las.
Obszar: Nowy Sącz
Oprogramowanie: LP360 (QCoherent), ArcMap (Esri)
ETAPY REALIZACJI ĆWICZENIA
9.10.1. Otwarcie dokumentu mapy i wczytanie danych
1. Uruchom aplikację ArcMap.
2. Do okna aplikacji ArcMap dodaj:• dane ALS (Dunajec.las) dla doliny rzeki Dunajec z obszaru Nowego Sącza wykorzystując narzędzie Add
LiDAR Data Layer dostępne na pasku narzędziowym LP360;• ortofotomapy (M-34-90-A-b-1-4.tiff oraz 34-90-A-b-2-3.tiff), wykorzystując polecenie Add Data znajdują-
ce się na pasku narzędziowym Standard.
9.10.2. Definicja parametrów wektoryzacji linii nieciągłości terenu
1. Uruchom pasek narzędziowy LP360 Digitize Breaklines, aby zdefiniować parametry wektoryzacji linii nie-ciągłości i dodaj nowe zadanie poprzez przycisk Active Conflation Task (ryc. 1).
2. W oknie Conflate Tasks Manager kliknij w polecenie Add Task (ryc. 2; nr 1), a następnie w wyświetlonym oknie Add Conflate Task Dialog nadaj zadaniu nazwę centrum rzeki (ryc. 2; nr 2) i przyciśnij OK.
Ryc. 1. Active Conflation Task dostępne na pasku narzędziowym LP360 Digitize Breaklines

9.10. Modelowanie przebiegu rzek z wykorzystaniem linii nieciągłości terenu
223
3. Następnie w oknie LP360 Conflate Task Dialog ustaw parametry widoczne na ryc. 3. Dzięki temu będziesz mógł wektoryzować, pobierać, a w rezultacie interpolować wartość wysokości z punktów znajdujących się w obszarze rzeki. Dodatkowo, dla wybranej metody Downstream Constraint ustaw parametry pobierania wartości wysokości – przyciśnij przycisk … (ryc. 3; nr 1).
4. W oknie Downstream Conflation Method ustaw parametry tak, aby wierzchołek dla linii nieciągłości terenu tworzony był co 5 m (ryc. 4; nr 1), a pobierana wartość wysokości była interpolowana (ryc. 4; nr 2) i stale malejąca (w przypadku wektoryzacji w dół rzeki) lub stale rosnąca (w przypadku wektoryzacji w górę rzeki). Kliknij OK w oknach Downstream Conflation Method oraz LP360 Conflate Task Dialog.
Ryc. 2. Dodawanie nowego zadania wektoryzacji linii nieciągłości terenu
1
2
Ryc. 3. Parametry wektoryzacja centrum rzeki
1

9. Zastosowania produktów LiDAR oraz przyszłość
224
9.10.3. Edycja linii nieciągłości terenu
1. Wykorzystując narzędzia dostępne w ArcCatalog, utwórz w folderze roboczym pliki SHP (poprzez przyci-śnięcie prawym klawiszem myszy na folder roboczy >> New >> Shapefile…):• centrum_rzeki.shp, wybierając w obszarze Feature Type: Polyline (ryc. 5),• brzeg_rzeki.shp wybierając w obszarze Feature Type: Polygon,
za każdym razem zaznaczając okienko dodające współrzędną Z dla pliku SHP, tworząc z niego plik SHP 3D.
1
2
Ryc. 4. Ustawienia wektoryzacji linii nieciągłości terenu w oknie Downstream Conflation Method
Ryc. 5. Ustawienia okna tworzenia nowego pliku SHP

9.10. Modelowanie przebiegu rzek z wykorzystaniem linii nieciągłości terenu
225
2. Uruchom edycję warstwy centrum_rzeki.shp – klikając na nią prawym przyciskiem myszy przejdź do pole-cenia Edit Features >> Start Editing.
3. Po uruchomieniu edycji przejdź do okna Create Features (pasek narzędziowy Editor >> Create Features) i wybierz warstwę centrum rzeki, a następnie z paska narzędziowego LP360 Digitize Breaklines wybierz ikonę LP360 Sketch Tool (ryc. 6; nr 1), pozwalającą na wektoryzajcę linii nieciągłości terenu.
4. Wykorzystując kursor myszy, przejdź w obszar centralny rzeki i rozpocznij wektoryzację jej centrum wy-korzystując uprzednio zdefiniowane zadanie Active Conflate Task – centrum rzeki (ryc. 6; nr 2). Podczas wektoryzacji możesz wyświetlić okno profilu poprzez przyciśnięcie przycisku P na klawiaturze komputera (ryc. 7).
5. Po wykonaniu wektoryzacji całego biegu rzeki, w celu jej zakończenia przyciśnij klawisz F2.6. Otwórz okno Edit Sketch Properties (pasek narzędziowy Editor >> Sketch Properties) – znajdują się w nim
informacje o atrybutach pobranej wartości wysokości z chmury punktów ALS (Z; ryc. 8; nr 1) oraz atrybu-tach odchyłki interpolacji wartości wysokości (M; ryc. 8; nr 2).
Ryc. 6. Narzędzia wektoryzacji linii nieciągłości terenu
21 3
Ryc. 7. Okno profilu i okno mapy służące do wektoryzacja linii nieciągłości terenu
Ryc. 8. Okno Edit Sketch Properties oraz wartości Z i M

9. Zastosowania produktów LiDAR oraz przyszłość
226
7. Podobnie jak w kroku 4, wykonaj wektoryzację dla pliku brzeg_rzeki.shp, tym razem wybierając Active Conflate Task: Drape Feature, pozwalającą na bezpośrednie pobieranie wartości wysokości z chmury punktów LiDAR. Wykonując wektoryzację, zawsze stawiaj punkt w miejscu połączenia się punktów leżących na gruncie z interpretowaną płaszczyzną powierzchni wody (ryc. 9).
8. Po wykonaniu poligonu brzeg_rzeki dokonaj przeglądu wartości wysokości dostępnych w oknie Edit Sketch Properties, a następnie z wykorzystaniem opcji Flattens river polygons (ryc. 6; nr 3) nadaj wartość wysokości brzegom rzeki tak aby prezentowały wartości stale malejące/rosnące.
9. W oknie River Flatten Dialog dla opcji River Polygons ustaw brzeg_rzeki (ryc. 10; nr 1), a dla opcji Stream Centerlines ustaw centrum_rzeki (ryc. 10, nr 2). Po ustawieniu właściwych warstw przyciśnij OK, aby wyko-nać proces. Wykonanie niniejszej analizy pozwoli na ujednolicenie wartości wysokości dla przeciwległych, wcześniej zwektoryzowanych brzegów rzeki.
9.10.4. Wizualizacja modelu z wykorzystaniem linii nieciągłości terenu
1. Chcąc dokonać wizualizacji linii nieciągłości terenu, przeklasyfikuj klasę 2 – Ground znajdującą się wewnątrz poligonu brzeg_rzeki.shp do klasy 9 – Water, wykorzystując zadanie ISOK_water.xml.
2. Wczytaj do oprogramowania zdefiniowane makropolecenie o nazwie ISOK_water.xml, które znajduje się w folderze ćwiczeniowym, wykorzystując funkcję Table Of Contents >> Point Cloud Task >> Import Task(s)…
3. Wybierz zaimportowane zadanie z zakładki Point Cloud Task i wykonaj polecenie Execute Task Using Feature Layer (ryc. 11; nr 1), wybierając w oknie Run By Feature Layer warstwę brzeg_rzeki (ryc. 11; nr 2).
Ryc. 9. Przykładowe miejsce połączenia się punktów leżących na gruncie z interpretowa-ną płaszczyzną powierzchni wody
Ryc. 10. Okno River Flatten Dialog wraz z wybranymi warstwami plików wektorowych
1
2

9.10. Modelowanie przebiegu rzek z wykorzystaniem linii nieciągłości terenu
227
4. Po wykonaniu zadania ustaw filtr wizualizacyjny Ground z paska narzędziowego LP360, a następnie przejdź do właściwości warstwy LAS Layer_1.
5. W tym celu przyciśnij prawy klawisz myszy na warstwie LAS Layer_1 i wybierz polecenie Properties.
6. W oknie Layer Properties przejdź do zakładki Display >> Breakline Enforcment i zaznacz opcję Use Breakline Enforcement (ryc. 12; nr 1) oraz plik brzeg_rzeki (ryc. 12; nr 2).
7. Dodatkowo, otwórz okno Buffer Classes poprzez przyciśnięcie przycisku Modify Classes… (ryc. 12; nr 3) i zaznacz wyłącznie klasę 9 – Water.
8. Po zdefiniowanych właściwościach wyświetlania w oknie Layer Properties przyciśnij OK.
9. W oknie mapy zobaczysz powierzchnię rzeki z zastosowanymi liniami nieciągłości terenu (ryc. 13). Dzięki temu NMT nie posiada widocznych śladów trójkątowania, jakie można wyraźnie dostrzec na NMT bez za-stosowania linii nieciągłości terenu.
Ryc. 11. Pasek narzędziowy LP360 Point Cloud Tasks oraz polecenie wykony-wania zadań dla wybranego pliku SHP
1
2
Ryc. 12. Okno właściwości i zakładka wizualizacji linii nieciągłości terenu
1
2
3

9. Zastosowania produktów LiDAR oraz przyszłość
228
10. Wizualizację linii nieciągłości terenu również można wykonać w oknie 3D (pasek narzędziowy LP360 Viewer Integration >> Define the 3D Window’s Extent) (ryc. 14), ustawiając właściwości (Display Properties) dla tego okna widoczne na ryc. 12.
9.10.5. Podsumowanie
W ramach ćwiczenia z zakresu modelowania przebiegu rzek z wykorzystaniem linii nieciągłości terenu zdefi-niowano parametry zadań służących pobieraniu wartości wysokości. Z ich wykorzystaniem zwektoryzowano centrum rzeki Dunajec oraz jego brzeg. W wyniku realizacji ćwiczenia utworzony został numeryczny model terenu z uwzględnieniem linii nieciągłości terenu.
Ryc. 13. NMT przed (po lewej) i po (po prawej) zastosowaniu linii nieciągłości terenu
Ryc. 14. NMT widoczny w oknie 3D przed (po lewej) i po (po prawej) zastosowaniu linii nieciągłości terenu
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................
9.11. Analiza skutków spiętrzenia wody w wyniku budowy zapory wodnej
229
9.11. Analiza skutków spiętrzenia wody w wyniku budowy zapory wodnej
Dane pochodzące z lotniczego skanowania laserowego mogą wspierać analizę obszarów przeznaczonych pod zbiornik wody w wyniku budowy zapory wodnej. W niniejszym ćwiczeniu określisz objętość hipotetycznego zbiornika i zalanej roślinności, dowiesz się ile budynków i na jaką wysokość zostanie zalanych w obszarze opra-cowania, a także dokonasz analizy przerwania ciągłości szlaków komunikacyjnych.
Szacowany czas wykonania ćwiczenia: 45 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\10_09_ZAPORA
• zapora.las – dane w formacie LAS 1.2 Point Data Record Format 3, z przeklasyfikowaną chmurą punktów w miejscu powstania zapory;
• zapora.shp – linia nieciągłości terenu obrazująca koronę zapory wodnej umieszczonej na wysoko-ści 511 m. Pozwala na wygenerowanie NMT z wykorzystaniem linii nieciągłości terenu;
• rzeki.shp – przebieg rzeki w obszarze planowanej zapory na podstawie danych z BDOT 10k;• budynki.shp – warstwa budynków dostępna w danych BDOT 10k;• drogi.shp – warstwa dróg dostępna w danych BDOT 10k;• ISOK_wysokosc_zbiornik.xml – plik XML, w którym zapisane jest zadanie nadawania stałej wartości
wysokości o rzędnej równej 510 m n.p.m.;• ISOK_objetosc_zbiornik.xml – plik XML ze zdefiniowanym zadaniem pozwalającym na analizę ob-
jętości na podstawie chmury punktów ALS;• ISOK_klasyfiakacja_zbiornik.xml – zadanie pozwalające na przeklasyfikowanie danych w obszarze
zbiornika wodnego do klasy 20.
Obszar: Dolina Potoku Czercz
Oprogramowanie: LP360 (QCoherent), ArcMap (Esri)
ETAPY REALIZACJI ĆWICZENIA
9.11.1. Otwarcie dokumentu mapy i wczytanie danych
1. Na ekranie głównym systemu Windows 8.1 należy wcisnąć kombinację klawiszy: Windows+Q (klawisz Windows znajduje się obok klawisza Ctrl). W pojawiającym się po prawej stronie ekranu oknie Wyszukaj wpisz ciąg znaków ‘ArcMap’. Po kliknięciu w ikonę programu ArcMap, która pojawi się poniżej, nastąpi uruchomienie aplikacji.
2. Do okna aplikacji ArcMap dodaj dane ALS (zapora.las), wykorzystując przycisk Add LiDAR Data Layer do-stępny na pasku narzędziowym LP360;
3. Skorzystaj z narzędzia Add Data dostępnego w pasku narzędziowym Standard i dodaj pliki:• zapora.shp,• rzeki.shp,• M-34-90-C-b-3-4.tif.
9.11.2. Określenie objętości modelu zbiornika
1. Korzystając z funkcji eksportu danych LiDAR (pasek narzędziowy LP360 >> Export LiDAR Data) wygeneruj NMT z wykorzystaniem linii nieciągłości terenu.
W pierwszym kroku generowania NMT wybierz parametry widoczne na rycinie 1 i dodatkowo ustaw filtr, wybierając wyłącznie klasę 2 – Ground (ryc. 1; nr 1).

9. Zastosowania produktów LiDAR oraz przyszłość
230
2. W celu wykonania NMT przyciśnij przycisk Breakline Enforcements (ryc. 1; nr 2).
3. W oknie Breakline Enforcement zaznacz funkcję Use Breakline Enforcement (ryc. 2; nr 1) i warstwę zapora (ryc. 2; nr 2), a następnie kliknij OK.
4. W następnych krokach skorzystaj z domyślnych ustawień poszczególnych okien, a eksportowany plik zapisz w folderze Robocze i nazwij NMT_Zapora.
5. W celu identyfikacji obszarów znajdujących się pod wodą, korzystając z funkcji Raster Calcutator przekla-syfikuj NMT_Zapora.flt tak, aby obszarom znajdującym się poniżej rzędnej 510 nadać wartość 1. Funkcja dostępna jest w ArcToolbox >> Spatial Analyst Tools >> Map Algebra.
Ryc. 1. Parametry eksportu NMT z wykorzystaniem linii nieciągłości terenu
1
2
Ryc. 2. Możliwości wykorzystania linii nieciągłości terenu
1
2

9.11. Analiza skutków spiętrzenia wody w wyniku budowy zapory wodnej
231
6. W oknie Raster Calculator w obszarze Map Algebra expression wpisz wyrażenieSetNull(„NMT_Zapora_elev.flt” > 510,1)
Jako Output raster zdefiniuj nazwę dla pliku wynikowego NMT_maska510_elev.tif.
7. W wyniku wykonanego przetworzenia otrzymałeś maskę obszarów znajdujących się poniżej rzędnej 510 m n.p.m.
8. W celu wektoryzacji obszaru, który będzie podlegał zalaniu, skorzystaj z funkcji Raster to Polygon dostęp-nej w ArcToolbox >> Conversion Tools >> From Raster, ustawiając parametry eksportu dokładnie takie same jak na rycinie poniżej (ryc. 3).
9. Uruchom edycję warstwy obszar_zalania.shp poprzez kliknięcie na nią prawym klawiszem myszy i wybra-nie opcji Edit Features >> Start Editing.
10. Ze zwektoryzowanej warstwy usuń poligony, które nie pokrywają swoim zasięgiem obszaru hipotetyczne-go zbiornika. W oknie mapy skorzystaj z narzędzi selekcji (ryc. 4) i wskaż poligon przedstawiający zbiornik.
11. Następnie w trybie edycji warstwy odwróć selekcję dla znaczonego zbiornika i usuń wybrane warstwy. Zapisz i zakończ edycję, wybierając funkcję Editor >> Stop Editing, dostępną na pasku narzędzio-wym Editor.
12. Dla obszaru zalania, wykorzystując funkcję nadawania wartości wysokości, nadaj poligonowi stałą wartość wysokości równą 510 m n.p.m. W tym celu zaimportuj zadanie ISOK_wysokosc_zbiornik.xml, wykorzystując polecenie: Table Of Contents >> Point Cloud Task >> Import Task(s)…
Ryc. 3. Właściwie ustawione parametry funkcji Raster to Polygon
Ryc. 4. Zaznaczony poligon narzędziem selekcji

9. Zastosowania produktów LiDAR oraz przyszłość
232
13. W celu wykonania zaimportowanego zadania, kliknij ikonę Execute Taks for a Project, dostępną na pasku narzędziowym LP360 Point Cloud Task.
14. Po wykonanym zadaniu do okna aplikacji zostanie wczytany plik obszar_zalania3D.shp, na podstawie któ-rego będziesz mógł dokonać obliczenia objętości hipotetycznego zbiornika.
15. W celu obliczenia objętości planowanego zbiornika wodnego, zaimportuj zadanie ISOK_objetosc_zbiornik.xml poprzez Table Of Contents >> Point Cloud Task >> Import Task(s)…, a następnie wykonaj wybrane zadanie (pasek narzędziowy LP360 Point Cloud Task >> Execute Taks for a Project).
16. Zadanie nie może być wykonane, ponieważ w południowo-zachodniej części zbiornika (ryc. 5) występu-je błąd geometrii, który uniemożliwia uruchomienie zadania. Błąd polega na przecinaniu się granic tego samego poligonu.
17. W celu usunięcia błędów, w trybie edycji (Edit Features >> Start Editing) usuń granicę poligonu, które się na siebie nakładają (ryc. 6) i ponownie wykonaj zadanie ISOK_objetosc_zbiornik.xml (pasek narzędziowy LP360 Point Cloud Task >> Execute Taks for a Project).
Ryc. 5. Obszar z występującym błędem związanym z nakładaniem się granic tego samego poligonu (na czerwono)
Ryc. 6. Usunięte węzły poligonu (zielone punkty z białym wnętrzem) z pliku obszar_zalania3D.shp

9.11. Analiza skutków spiętrzenia wody w wyniku budowy zapory wodnej
233
18. W wyniku wykonanej funkcji otrzymano wartość objętości zbiornika wynoszącą 10 301 773,396 m3. Wynik ten dostępny jest w tabeli atrybutów pliku objętość_zapora.shp (przyciśnij prawy klawisz myszy na wybra-nej warstwie i wybierz polecenie Open Attribute Table) w kolumnie Volume.
19. Korzystając z kalkulatora (np. dostarczonego z systemem Windows: naciśnij kombinajcę klawiszy Windows+Q i wpisz ‘calc.exe’), można obliczyć czas napełnienia zbiornika (przy założeniu, że średni przepływ równy jest 1 m3/s). Wynik to ponad 119 dni.
9.11.3. Generowanie modelu wysokości wody na zalanym obszarze
1. W celu wygenerowania modelu wysokości wody na zalanym obszarze, oprócz NMT należy posiadać model zwierciadła wody (MZW).
2. Skopiuj chmurę punktów o nazwie zapora.las, dostępną w folderze ćwiczeniowym i zapisz w folderze Robocze, zmieniając jej nazwę na zapora_MZW.las.
3. Plik zapora_MZW.las wczytaj (pasek narzędziowy LP360 >> Add LiDAR Data Layer) do oprogramowania LP360 z możliwością edycji chmury punktów (funkcja Open Read-Write; ryc. 7; nr 1) i odznaczoną funkcją Append to Compatible Layers (ryc. 7; nr 2).
4. Następnie przeklasyfikuj chmurę punktów w obszarze zbiornika do klasy 20 – Reserved. W tym celu wczytaj zdanie ISOK_klasyfiakacja_zbiornik.xml z folderu ćwiczeniowego, korzystając z funkcji Table Of Contents >> Point Cloud Task >> Import Task(s)…
5. Uruchom wczytane zadanie, korzystając z przycisku Execute Task Using Feature Layer, dostępnego na pasku narzędziowym LP360 Point Cloud Tasks (ryc. 8), wybierając warstwę objetosc_zapora.shp i przy-cisk Run.
6. Po wykonanym przeklasyfikowaniu chmury punktów możesz wykonać generowanie MZW, wykorzystując funkcję Export LiDAR Data dostępną na pasku narzędziowym LP360.
7. Podczas wykonywania eksportu ustaw opcje widoczne na rycinie 1, używając obszar_zalania3D.shp jako linię nieciągłości terenu (ryc. 9) i wykonaj zadanie nadając plikowi nazwę MZW.
Ryc. 7. Dodawanie nowego pliku LAS
12
Ryc. 8. Wykonanie zadania na wybranym pliku SHP
Ryc. 9. Wybór obszaru zalania 3D w celu generowania MZW

9. Zastosowania produktów LiDAR oraz przyszłość
234
8. Dla wygenerowanego pliku MZW.flt wykonaj odejmowanie, wykorzystując funkcję Minus dostępną w ArcToolbox >> Spatial Analyst Tools >> Math, obierając ustawienia zgodne z ryciną 10. Dzięki temu uzyskamy model wysokości wody.
9.11.4. Analizy zalania budynków
1. Do aplikacji dodaj funkcją Add Data pliki:• budynki.shp,• drogi.shp.
2. Korzystając z narzędzi selekcji (Select By Location; ryc. 11) dla warstwy budynki.shp, możesz sprawdzić liczbę przeznaczonych do wyburzenia budynków w związku z budową hipotetycznej zapory, ustawiając parametry widoczne na rycinie 11.
Ryc. 10. Tworzenie modelu wysokości wody
Ryc. 11. Selekcja budynków w obszarze zalania wodami z zapory

9.11. Analiza skutków spiętrzenia wody w wyniku budowy zapory wodnej
235
3. W tym celu, po wykonanej selekcji otwórz tabelę atrybutów (przyciśnij prawy klawisz myszy na warstwie budynki.shp i wybierz polecenie Open Attribute Table) i sprawdź, jaka liczba budynków została wybrana. Budynki, które zostały wyszukane podczas selekcji, wyeksportuj (przyciśnij prawy klawisz myszy na war-stwie budynki.shp i wybierz polecenie Data >> Export Data) nadając im nazwę budynki_zalane.shp.
4. W celu ustalenia wartości wysokości zalania wodą budynków, z warstwy budynki_zalane.shp wybierz funkcję dostępną w ArcToolbox >> Spatial Analyst Tools >> Zonal >> Zonal Statistic as Table i wykonaj ustawienia parametrów widocznych na rycinie 12. Wynikiem będzie tabela atrybutów zawierająca maksymalne warto-ści wysokości zalania każdego budynku w obrębie hipotetycznego obszaru przeznaczonego pod zalanie.
5. Otrzymaną tabelę max_zalania.dbf połącz z tabelą atrybutów warstwy budynki_zalane.shp, poprzez przyci-śnięcie prawym przyciskiem myszy na niniejszą warstwę i skorzystanie z funkcji: Joins and Relates >> Join…
6. W oknie Join Data skonfiguruj połączenie tabel tak, jak przedstawia to rycina 13 i kliknij OK.
Ryc. 12. Parametry funkcji Zonal Statistic as Table
Ryc. 13. Łączenie tabeli max_zalania z plikiem budynki_zalane.shp

9. Zastosowania produktów LiDAR oraz przyszłość
236
7. Po połączeniu tabel, w kolumnie MAX warstwy budynki_zalane.shp znajduje się 108 budynków z wartościa-mi wysokości zalania budynków na co najmniej 2 m wysokości od ich podstawy.
9.11.5. Analizy przerwania ciągłości szlaków komunikacyjnych
1. W celu wykonania analizy przerwania szlaków komunikacyjnych skorzystaj z funkcji Clip dostępnej w ArcToolbox >> Analysis Tools >> Extract (ryc. 14). Dzięki wykonanym przetworzeniom obliczysz długość dróg zalanych w wyniku budowy zapory wodnej.
2. Włącz edycję warstwy drogi_clip.shp (przyciśnij prawy klawisz myszy na wybranej warstwie i wybierz po-lecenie Open Attribute Table), zaznacz wszystkie polilinie budujące plik, a następnie na pasku narzędzio-wym Editor skorzystaj z funkcji Editor >> Merge.
3. W otwartym oknie Merge zaznacz dowolną polinię i przyciśnij OK. Dzięki wykorzystaniu funkcji Merge wszystkie zalane drogi połączyły się w jedną polilinię, dla której będzie można obliczyć długość dróg znaj-dujących się w obszarze hipotetycznego zbiornika wodnego.
4. W celu obliczenia długości zalanych dróg, w tabeli atrybutów utwórz pustą kolumnę (Table Option >> Add Field) o nazwie dlugosc i kliknij prawym przyciskiem myszy na nagłówek kolumny w celu skorzystania z funkcji Calculate Geometry (ryc. 15).
5. W wyświetlonym oknie Calculate Geometry pozostaw domyślne opcje i przyciśnij OK. Dzięki temu w tabeli atrybutów otrzymamy obliczoną długość dróg przeznaczonych pod zalanie.
Ryc. 14. Parametry funkcji Clip
Ryc. 15. Okno Calculate Geometry wraz z funkcją obliczania długości polilinii

9.11. Analiza skutków spiętrzenia wody w wyniku budowy zapory wodnej
237
9.11.6. Analizy objętości zalanej klasy roślinności
1. W celu wykonania analizy objętości klasy roślinności w obszarze przeznaczonym do hipotetycznego zala-nia (obszar_zalania3D.shp), wykonaj proces wykorzystując zadanie ISOK_objetosc_ros_zbiornik.xml.
2. W tym celu załaduj powyższe zadanie do zakładki Point Cloud Task korzystając z funkcji Import Task(s)…, a następnie wykonaj zadanie dla całego projektu wybierając ikonę Execute Taks for a Project dostępną na pasku narzędziowym LP360 Point Cloud Task.
3. W wyniku wykonania zadania otrzymano objętość klasy roślinności na podstawie analizy modeli zbudo-wanych „w locie” z klas chmury punktów. Wartość ta dostępna jest w tabeli atrybutów dla nowej warstwy: objetosc_roslinnosc.shp (ryc. 16).
9.11.7. Podsumowanie
W ćwiczeniu dokonano analizy objętości hipotetycznego zbiornika wodnego wraz z analizą szybkości jego za-pełnienia, korzystając z wykonanych obrysów zbiornika przy pomocy nadawania wartości wysokości plikom SHP. Ponadto, w oparciu o model zwierciadła wody i numeryczny model terenu, określono model wysokości wody w celu nadania budynkom maksymalnej wartości zalania wodą ze zbiornika. W dalszych krokach określo-no długość przerwanych szlaków komunikacyjnych, a także wykonano analizę objętości zalanej klasy roślinność.
Ryc. 16. Wyniki analizy objętości dla klasy roślinności
? .....................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
...........................................................................................................................................................................................................................
..........................................................................................................................................................................................................................

9. Zastosowania produktów LiDAR oraz przyszłość
238
9.12. Analiza widoczności przejazdu kolumny rządowej
Ćwiczenie ma na celu przeprowadzenie analiz widoczności w kontekście oceny bezpieczeństwa przejazdu kolumny rządowej przez centrum Warszawy. W wyniku realizacji ćwiczenia, uczestnik nabędzie umiejętności przeprowadzania analiz widoczności z wykorzystaniem numerycznego modelu pokrycia terenu oraz pliku wektorowego 3D definiującego przebieg planowanej trasy przejazdu, a także określania widoczności ze zdefi-niowanych stanowisk obserwatora.
Szacowany czas wykonania ćwiczenia: 45 minut
Dane: D:\Szkolenia_LiDAR\Cwiczenia\10_10_PRZEJAZDY
• nmpt.tif – numeryczny model pokrycia terenu w formacie TIFF (w celu przyspieszenia przetwarza-nia podczas analiz, dokonano przepróbowania modelu NMT do rozdzielczości 2,0 m);
• orto.tif – cyfrowa ortofotomapa lotnicza w formacie TIFF, o rozdzielczości 10 cm;• trasa.shp – trasa przejazdu kolumny rządowej (format SHP);• trasa_3D.shp – trasa przejazdu kolumny rządowej (format SHAPE 3D);• BDOT_Budynki_3D.shp – warstwa wektorowa reprezentująca obrysy budynków (format SHAPE 3D;
BDOT10k – 2D);• trasa_przejazdu.mxd – projekt programu ArcMap;• trasa_przejazdu_3D.sxd – projekt programu ArcScene;• stanowiska.sxd – projekt programu ArcScene;• pkt_3D.shp – warstwa wektorowa reprezentująca potencjalne pozycje zamachowca w formacie SHP.
Obszar: Warszawa
Oprogramowanie: ArcMap (Esri), ArcScene (Esri)
ETAPY REALIZACJI ĆWICZENIA
9.12.1. Uruchomienie zdefiniowanego projektu w programie ArcMap
1. W celu zapoznania się z przebiegiem projektowanej trasy przejazdu kolumny rządowej, otwórz projekt pro-gramu ArcMap o nazwie trasa_przejazdu.mxd.
2. W projekcie znajdują się następujące pliki: orto.tif, nmpt.tif oraz trasa.shp.
9.12.2. Wykonanie analizy widoczności z projektowanej trasy
1. Celem pierwszej części ćwiczenia jest wyznaczenie strefy potencjalnego zagrożenia, tj. miejsc, z których widoczne są odcinki trasy przejazdu. Wykorzystaj w tym celu numeryczny model pokrycia terenu oraz war-stwę trasa.shp.
2. Wykorzystaj narzędzie Viewshed (ryc. 1) dostępne w programie ArcMap (Arc Toolbox >> 3D Analyst Tools >> Visibility >> Viewshed), aby wykonać omawianą analizę. Jako raster wejściowy (Input raster) wybierz plik nmpt.tif, natomiast jako wektorową warstwę wejściową (Input point or polyline observer features) wskaż plik trasa.shp. Plik wyjściowy powinien otrzymać nazwę strefa_zagrozenia.tif. Otrzymana warstwa wynikowa strefa_zagrozenia.tif reprezentuje obszary, z których widoczne są odcinki trasy przejazdu.
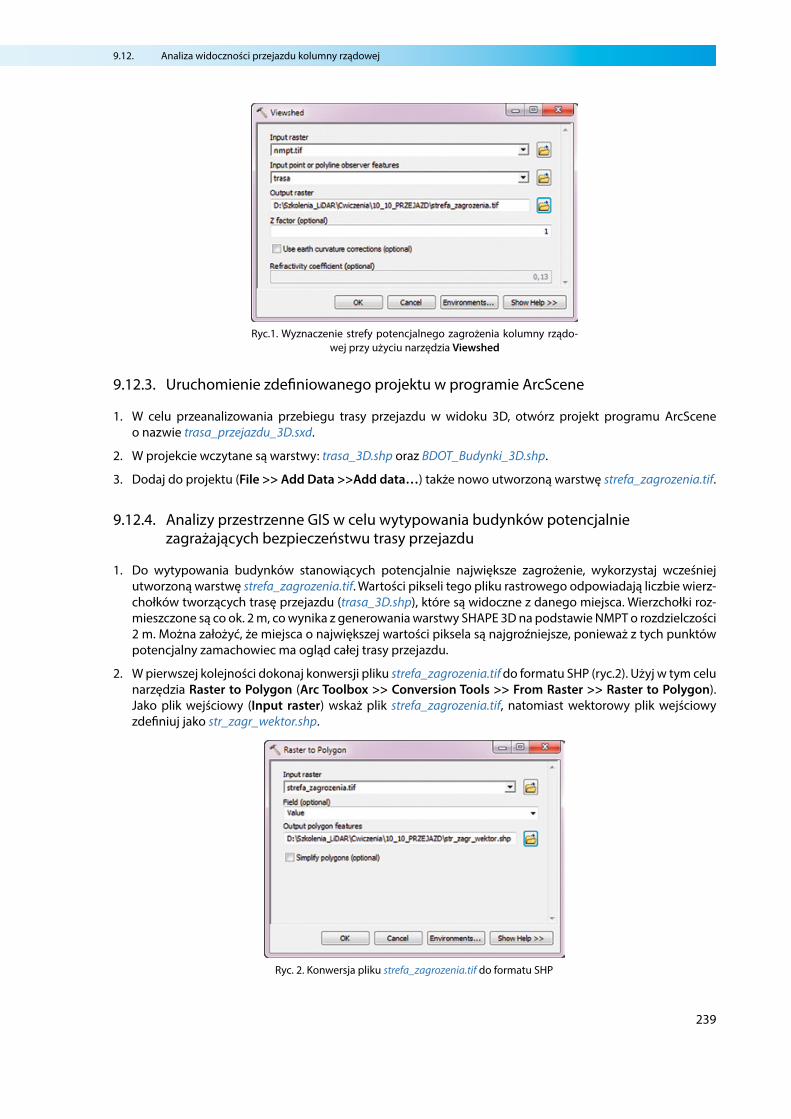
9.12. Analiza widoczności przejazdu kolumny rządowej
239
9.12.3. Uruchomienie zdefiniowanego projektu w programie ArcScene
1. W celu przeanalizowania przebiegu trasy przejazdu w widoku 3D, otwórz projekt programu ArcScene o nazwie trasa_przejazdu_3D.sxd.
2. W projekcie wczytane są warstwy: trasa_3D.shp oraz BDOT_Budynki_3D.shp.
3. Dodaj do projektu (File >> Add Data >>Add data…) także nowo utworzoną warstwę strefa_zagrozenia.tif.
9.12.4. Analizy przestrzenne GIS w celu wytypowania budynków potencjalnie zagrażających bezpieczeństwu trasy przejazdu
1. Do wytypowania budynków stanowiących potencjalnie największe zagrożenie, wykorzystaj wcześniej utworzoną warstwę strefa_zagrozenia.tif. Wartości pikseli tego pliku rastrowego odpowiadają liczbie wierz-chołków tworzących trasę przejazdu (trasa_3D.shp), które są widoczne z danego miejsca. Wierzchołki roz-mieszczone są co ok. 2 m, co wynika z generowania warstwy SHAPE 3D na podstawie NMPT o rozdzielczości 2 m. Można założyć, że miejsca o największej wartości piksela są najgroźniejsze, ponieważ z tych punktów potencjalny zamachowiec ma ogląd całej trasy przejazdu.
2. W pierwszej kolejności dokonaj konwersji pliku strefa_zagrozenia.tif do formatu SHP (ryc.2). Użyj w tym celu narzędzia Raster to Polygon (Arc Toolbox >> Conversion Tools >> From Raster >> Raster to Polygon). Jako plik wejściowy (Input raster) wskaż plik strefa_zagrozenia.tif, natomiast wektorowy plik wejściowy zdefiniuj jako str_zagr_wektor.shp.
Ryc.1. Wyznaczenie strefy potencjalnego zagrożenia kolumny rządo-wej przy użyciu narzędzia Viewshed
Ryc. 2. Konwersja pliku strefa_zagrozenia.tif do formatu SHP

9. Zastosowania produktów LiDAR oraz przyszłość
240
3. Trasa składa się z 489 wierzchołków. W celu wybrania miejsc, które są widoczne z określonej liczby wierzchołków, użyj narzędzia Select by Attributes. Wyselekcjonuj poligony z nowo utworzonego pliku str_zagr_wektor.shp, dla których wartość w polu grid_code jest większa od 470 (ryc. 3).
4. Następnie dokonaj wyboru budynków, które stanowią potencjalnie największe zagrożenie i powinny być w pierwszej kolejności zabezpieczone przez osoby zapewniające bezpieczeństwo przejazdu. W tym celu użyj narzędzia Select By Location znajdującego się w zakładce Selection (ryc. 4).
Ryc. 3.Wyselekcjonowanie z pliku str_zagr_wektor.shp miejsc najbardziej optymalnych dla zamachowca
Ryc. 4. Wybór narzędzia Select By Location w programie ArcScene

9.12. Analiza widoczności przejazdu kolumny rządowej
241
5. Opcje selekcji ustaw zgodnie z poniższą ryciną (ryc. 5).
6. Na rycinie 6 przedstawiono wynik omawianej selekcji.
Ryc. 5. Wyselekcjonowanie budynków najbardziej zagrożonych przy użyciu narzędzia Select By Location
Ryc. 6. Wynik selekcji najbardziej zagrażających budynków

9. Zastosowania produktów LiDAR oraz przyszłość
242
7. W celu zapisania wyselekcjonowanych budynków do nowego pliku, użyj narzędzia Export Data, które można znaleźć na liście narzędzi po kliknięciu prawym przyciskiem myszy na warstwę BDOT_Budynki_3D.shp (ryc. 7). W oknie Export Data pozostaw domyślnie ustawione opcje Export: Selected features oraz Use the same coordinate system as: this layer’s source data. Utworzony plik powinien otrzymać nazwę budynki_zagrazajace.shp.
9.12.5. Analizy widoczności dla wskazanych stanowisk obserwatorów na dachach budynków
1. Bazując na wyżej utworzonej warstwie budynków najbardziej niebezpiecznych (budynki_zagrazajace.shp), utworzono warstwę pkt_3D.shp, która reprezentuje trzy potencjalne stanowiska zamachowca.
2. Wykonując poniższe polecenia, określ widoczność z każdego stanowiska. W pierwszej kolejności otwórz projekt programu ArcScene o nazwie stanowiska.sxd, a następnie użyj narzędzia Observer Points (Arc Toolbox >> 3D Analyst Tools >> Visibility >> Observer Points), stosując ustawienia przedstawione poniżej (ryc. 8). Jako rastrowy plik wejściowy wykorzystaj plik nmpt.tif, natomiast jako warstwę punktów obserwacyjnych – plik pkt_3D.shp. Zdefiniuj nazwę pliku wyjściowego jako stanowiska_widocznosc.tif.
Ryc. 7. Export wyselekcjonowanych budynków stanowiących naj-większe zagrożenie
Ryc.8. Generowanie warstwy rastrowej reprezentującej widoczność z wybra-nych trzech stanowisk obserwatora

9.12. Analiza widoczności przejazdu kolumny rządowej
243
3. W tabeli atrybutów nowo utworzonej warstwy stanowiska_widocznosc.tif sprawdź znaczenie wartości pikseli (ryc. 9). W celu otwarcia tabeli atrybutów, kliknij prawym przyciskiem myszy na warstwę stanowiska_widocznosc.tif, znajdującą się w tabeli zawartości (Table of Contents) i wybierz polecenie Open Attribute Table.
Przykładowo, wartość piksela Value=5 (OBS1=1, OBS2=0, OBS3=1) oznacza, że miejsca te widoczne są z punktów nr 1 i 3, natomiast nie są widoczne z punktu 2.
4. Na rycinie 10 przedstawiono wynik analizy widoczności dla wybranych trzech punktów obserwacyjnych. Na podstawie przedstawionej mapy możemy zidentyfikować odcinek trasy, który widoczny jest dla wszyst-kich trzech stanowisk (7 – kolor brązowy), który jest potencjalnie najbardziej niebezpieczny.
9.12.6. Podsumowanie
Ćwiczenie miało na celu przedstawienie możliwości przeprowadzania analiz widoczności na podstawie pro-duktów LiDAR oraz warstw wektorowych 3D w kontekście zabezpieczenia przejazdu kolumny rządowej przez centrum Warszawy. W pierwszej części ćwiczenia wyznaczono potencjalną strefę zagrożenia poprzez utworze-nie warstwy rastrowej reprezentującej widoczność poszczególnych wierzchołków liniowego pliku wektorowe-go, definiującego przebieg trasy. Następnie dokonano selekcji budynków stanowiących najbardziej optymalne stanowiska dla potencjalnego zamachowca. W ostatniej części ćwiczenia przeprowadzono analizę widoczno-ści dla trzech wybranych stanowisk obserwatora. Podobne analizy można wykonać w programie QGIS.
Ryc. 9. Tabela atrybutów warstwy stanowiska_widocznosc.tif
Ryc. 10. Wynik analizy widoczności z trzech wybranych punk-tów obserwacyjnych – warstwa stanowiska_widocznosc.tif

I