uom robotics and industrial automation laboratorystaff.um.edu.mt/michael.saliba/rial-mar11.pdf ·...
TRANSCRIPT

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
UOM Robotics and Industrial Automation Laboratory

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
RIAL Mission
o to be a Centre of Excellence in Malta for research, development, teaching and outreach in the broad areas of Robotics and of Industrial Automation
o to make contributions to the international community in niche areas of Robotics and of Manufacturing Automation

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
RIAL Facilities
o Mitsubishi RV-6SL 6-DOF revolute industrial robot, 91cm reach, 6kg payload, with controller upgrade, tracking card, and adjustable gripper, or vacuum gripper. Mounted on a highly reconfigurable table.
o Epson E2S651S 4-DOF SCARA robot, 65cm reach, 5kg payload
o PUMA 260 6-DOF robot, 40cm reach, 1kg payload o Two Cognex/DVT smart image sensors (machine vision) o Six Mitsubishi FX1N-24 PLCs o Two flat belt conveyors (one with variable speed) o Machine vision lighting (ring light, strobe) o Other sundry equipment, components and tools

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
RIAL Research
Two major themes:
o Versatile grippers and dexterous robot hands
slip sensing project; HAND project; various FYPs
o Manufacturing Automation
AUTOMATE project; various FYPs;
Collaboration with local industry

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
The IAL Versatile Gripper
3 fingers
9 links, 1 DOF
Stepper motor
Remote actuation
Tendon transmission
Fingertip force, palm
proximity sensors
offline adjustable finger
orientations

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
The IAL Material Transfer System
PUMA 260 Robot
DVT SmartImage Sensor
IAL Versatile Gripper
Conveyor, equipped with
photoelectric proximity sensors
PC (controller)

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
The IAL Anthropomorphic Hand – Model 1
2 fingers + thumb
2 coupled links per finger
wrist pitch and roll
5 DOF
DC motors
Remote actuation
Tendon transmission
Tele-operated

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
The IAL Anthropomorphic Hand – Model 2
Exo-skeletal design
3 fingers + thumb
3 joints per finger
human-like flexion motion
8 DOF
DC motors
Tendon transmission
Position and force sensing
Remote actuation and
sensing

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
The IAL Integrated Finger
4 joints, 3 DOF
miniature DC motors
full kinematic solutions

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
Slip Sensing and Force Control
W
F
Strain gauge(s)
Primary contact
Top attachment
Bottom attachment
Secondary contact
Finger skeleton
Rubber skin
Object
Novel sensor, to detect
incipient object slip
full analysis, experimental
validation and simulation
University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
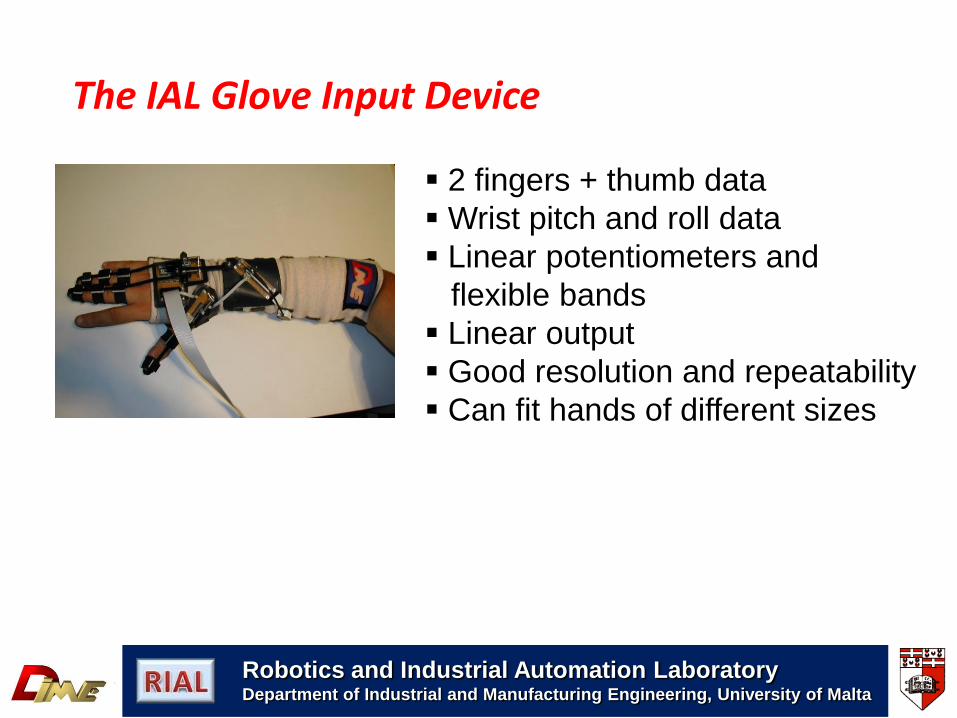
The IAL Glove Input Device
2 fingers + thumb data
Wrist pitch and roll data
Linear potentiometers and
flexible bands
Linear output
Good resolution and repeatability
Can fit hands of different sizes

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
The RIAL Haptic Glove Data input from finger and
thumb MCP and PIP joints
Development of a MRF
actuator
Force feedback to joints of
middle finger
University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
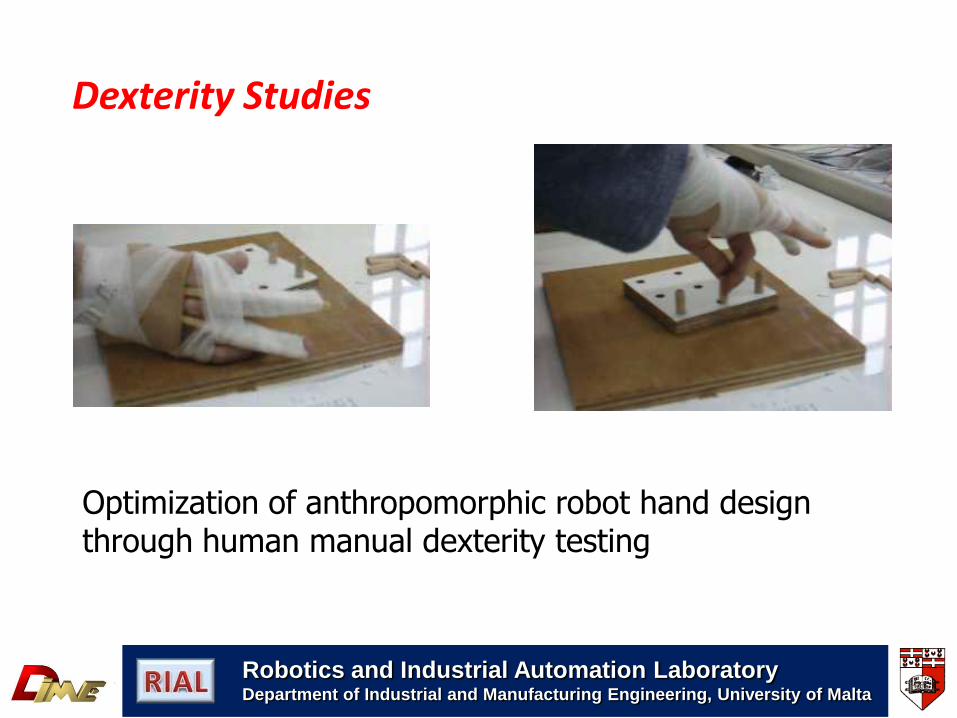
Dexterity Studies
Optimization of anthropomorphic robot hand design through human manual dexterity testing

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
Reporting and Test Standards

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
Industrial Automation Projects

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
Industrial Automation in Malta
Comprehensive survey on the use, perceptions and problems associated with automation
70 local respondents

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
Reconfigurable Automation
A new model for the development of reconfigurable automation systems for high added-value manufacturing
Development of a versatile manufacturing automation test bed, highly reconfigurable to cater for different sectors
Implementation of model and test bed to three industrial test cases
Development of industrial automation guidelines

University of Malta Robotics and Industrial Automation Laboratory Department of Industrial and Manufacturing Engineering, University of Malta
Thank you