uom robotics and industrial automation laboratory -...
TRANSCRIPT

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
UOM Robotics and Industrial Automation Laboratory

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
RIAL Missiono to be a Centre of Excellence in Malta for research,
development, teaching and outreach in the broad areas of Robotics, of Mechatronics, and of Industrial Automation
o to make contributions to the international community in niche areas of Robotics, of Mechatronics, and of Industrial Automation

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
RIAL Facilities
o Mitsubishi RV-6SL 6-DOF revolute robot, 91cm reach, 6kg payload, with controller upgrade, tracking card, and adjustable gripper, or vacuum gripper. Mounted on a highly reconfigurable table.
o Epson E2S651S 4-DOF SCARA robot, 65cm reach, 5kg payload
o Two Cognex/DVT smart image sensors (machine vision)o Six Mitsubishi FX1N-24 PLCso Two flat belt conveyors (one with variable speed)o Machine vision lighting (ring light, strobe)o Other sundry equipment, components and toolso Various robot hands and glove devices, built in house

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
RIAL research and lab sessions
Mechatronics and Robotics researchers
Mechatronics lab sessions

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
RIAL robots in action
Cocktail server demo
Column building demo

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
RIAL Research
Two major themes:
o Robotics and Mechatronics:
Versatile grippers and dexterous robot hands; glove input
devices; dexterity studies; design of mechatronic devices;
innovative sensors and actuators.
o Manufacturing Automation
Reconfigurable manufacturing automation systems; analysis of
automation use in industry; industrial automation case study
projects in collaboration with industry.
This presentation focusses mainly on published workIn the subsequent slides, all dates refer to publication dates

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
PART 1: Dexterity and Design Optimization Studies
(Robotics, Mechatronics)
University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2006 and 2013: Dexterity Studies
Two complementary studies:
o Manual dexterity studies and minimal requirements for
a dexterous anthropomorphic artificial hand
o Actuation Dexterity – a framework for the evaluation of
the detailed and overall actuation approach used in
generic multi-degree-of-freedom mechatronic devices
that have space and weight constraints.

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
o Minimal requirements for satisfactory manual dexterity
extracted from constrained human testing
o Dexterity quantified through standard tests
2013: Dexterity Studies
Standard dexterity tests

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
o Minimal requirements for satisfactory manual dexterity
extracted from constrained human testing
o Dexterity quantified through standard tests
2013: Dexterity Studies
Examples of hand constraints

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2013: Dexterity Studies
Quantified dexterity penalties due to various manual constraints

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
A minimal anthropomorphic dexterous hand that could
achieve 84% of human dexterity should have:
o Two fingers (equivalent to the human index and middle
fingers) and a thumb
o The corresponding finger MCP and PIP joints
o DIP joints coupled to the PIP joints by ratio of 2:3
o The abduction-adduction joint
o At least 3 DOF in the thumb
o An effective sense of touch
o The equivalent, performance-wise, of the human control,
actuation/transmission, and vision feedback processing
systems
2013: Dexterity Studies

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
Note: thumb constraints were removed
British plug rewiring exercise was carried out with only three available fingers on each hand, in approximately the same time as with free hands.
2013: Dexterity Studies

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2013: Actuation Dexterity
Forty eight evaluation criteria, categorized as follows:
o Intrinsic properties of the actuation system and its
constituents
o Properties / effects of the actuation system with
respect to the other universal elements of the device
(excluding overall device properties)
o Properties / effects of the actuation system with
respect to the properties and capabilities of the device
o Properties / effects of the actuation system with
respect to the expectations of the device type
This evaluation exercise has been named the Dexterous
actuation assessment protocol (DAAP)

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2013: Actuation Dexterity
Application of DAAP to the design of mechatronic devices

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2015: Quasi-dynamic Analysis, Design Optimization, and Evaluation of a Two-finger Underactuated Hand
A detailed analytical, experimental, simulation and optimization exercise challenges the conventional design of planar underactuated robot hands, and suggests paradigm changes to improve grasping performance
Finger 1
Finger 2
Upper link
Object
Upper joint
Lower link
Lower joint
Palm
University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
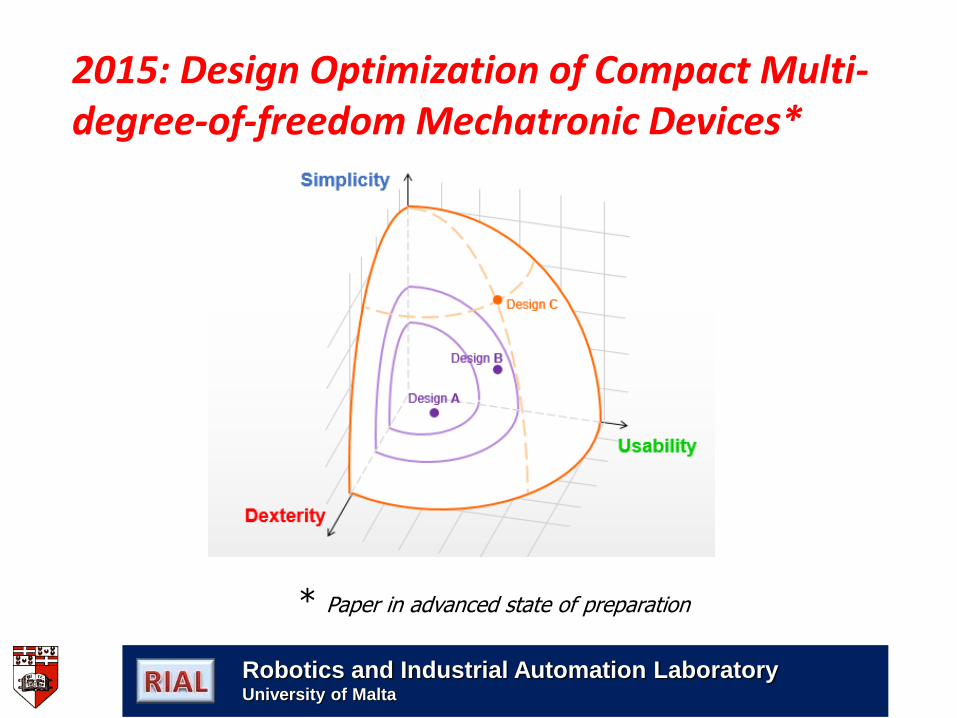
2015: Design Optimization of Compact Multi-degree-of-freedom Mechatronic Devices*
* Paper in advanced state of preparation

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
PART 2: Dexterous Hands, Glove Input / Output Devices,
and Innovative Sensors
(Robotics, Mechatronics)

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2001: The RIAL Versatile Gripper
3 fingers
9 links, 1 DOF
Stepper motor
Remote actuation
Tendon transmission
Fingertip force, palm
proximity sensors
offline adjustable finger
orientations

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2004: Slip Sensing and Force Control
W
F
Strain gauge(s)
Primary contact
Top attachment
Bottom attachment
Secondary contact
Finger skeleton
Rubber skin
Object
Novel sensor, to detect
incipient object slip
full analysis, experimental
validation and simulation

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2004: The RIAL Glove Input Device
2 fingers + thumb data
Wrist pitch and roll data
Linear potentiometers and
flexible bands
Linear output
Good resolution and repeatability
Can fit hands of different sizes

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2005: The RIAL Anthropomorphic Hand – Model 1 2 fingers + thumb
2 coupled links per finger
wrist pitch and roll
5 DOF
DC motors
Remote actuation
Tendon transmission
Tele-operated

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2006: The RIAL Integrated Finger
4 joints, 3 DOF
miniature DC motors
full kinematic solutions

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2007: The RIAL Anthropomorphic Hand – Model 2
Exo-skeletal design
3 fingers + thumb
3 joints per finger
human-like flexion motion
8 DOF
DC motors
Tendon transmission
Position and force sensing
Remote actuation and
sensing

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2010:The RIAL Haptic Glove
Data input from finger and
thumb MCP and PIP joints
Development of an actuator
based on magnetorheological
fluid
Force feedback to joints of
middle finger

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2010: Reporting and Test Standards for Artificial Hands

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2014: University of Malta Minimal Anthropomorphic Robot Hand I : UM-MAR Hand I
Detailed design features based on achieving grasp taxonomy of Cutkosky, 1989

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2014: University of Malta Minimal Anthropomorphic Robot Hand I : UM-MAR Hand I

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2014: University of Malta Minimal Anthropomorphic Robot Hand I : UM-MAR Hand I

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2014: University of Malta Minimal Anthropomorphic Robot Hand I : UM-MAR Hand I

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2014: RIAL QTC Tactile Sensor
Based on quantum tunnelling
composite material
Based on human experimentation
that determined minimum
specifications for satisfactory
dexterity
Soft silicon
Stiff silicon
Base gold electrode
Top
gold
electrod
e
QTC
Top gold electrode
University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
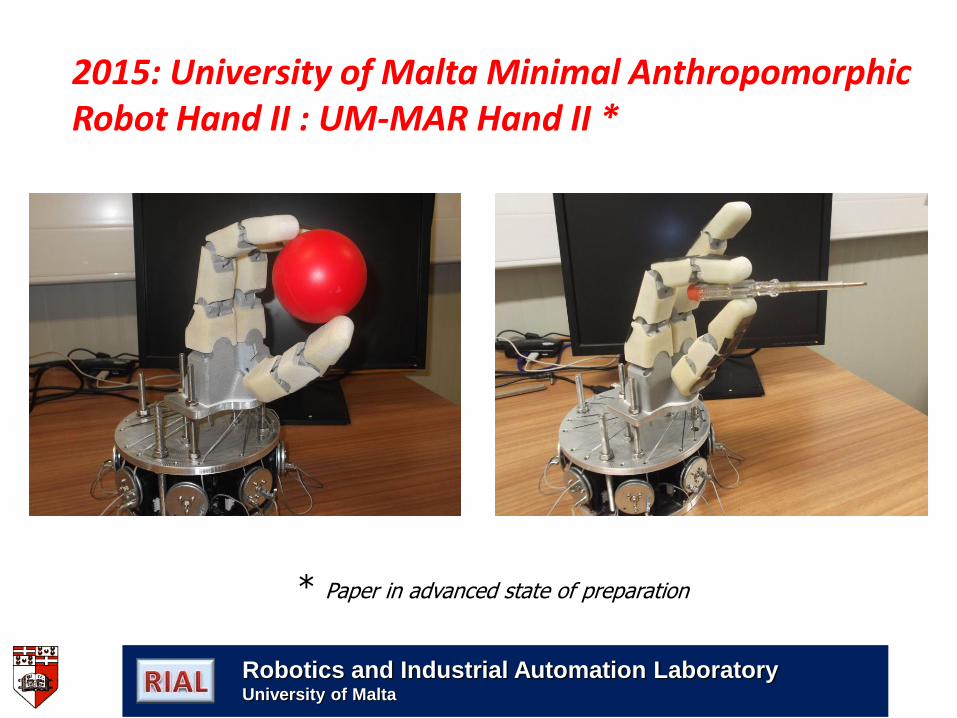
2015: University of Malta Minimal Anthropomorphic Robot Hand II : UM-MAR Hand II *
* Paper in advanced state of preparation

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2015: University of Malta Minimal Anthropomorphic Robot Hand II : UM-MAR Hand II *

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
PART 3: Industrial Automation
University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
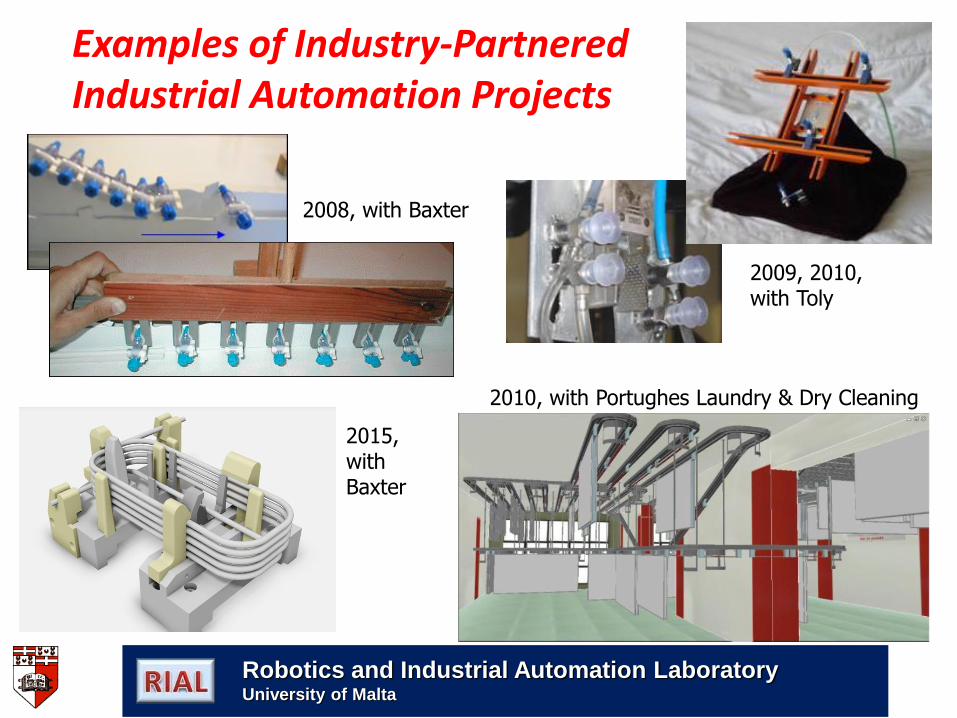
Examples of Industry-PartneredIndustrial Automation Projects
2008, with Baxter
2009, 2010, with Toly
2010, with Portughes Laundry & Dry Cleaning
2015, with Baxter

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2008: The RIAL Material Transfer System
PUMA 260 Robot
DVT SmartImage Sensor
RIAL Versatile Gripper
Conveyor, equipped with
photoelectric proximity sensors
PC (controller)
System can recognize object type,
position and orientation, and
relocate it successfully

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2009: Industrial Automation in Malta
Comprehensive survey on the use, perceptions and problems associated with automation
70 local respondents

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2012: Migration from Manual to Automated Assembly of a Product Family
Formal generic guidelines developed
Case study with Methode

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
Changeover
Process
TIME
2012: Robot Time and Cost Management
An analytical study on the application of a robot to
multiple low-volume production processes
Included a case study with Playmobil

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
2008 – 2015: Reconfigurable Automation
New models and guidelines for the development, conversion and / or evaluation of reconfigurable automation systems for high added-value manufacturing (still not published)
Development of a versatile manufacturing automation test bed, highly reconfigurable to cater for different sectors
Implementation of model and test bed to three industrial test cases (Cheops, ProMinent, Toly)
Development of industrial automation guidelines

University of MaltaRobotics and Industrial Automation LaboratoryUniversity of Malta
End