university of bridgeport
DESCRIPTION
University of Bridgeport. School of Engineering. Prof. Tarek Sobh Vice President for Graduate Studies and Research Dean, School of Engineering. University of Bridgeport. Capabilities and research facilities / groups. School of Engineering. Multimedia Information Group (MIG) Laboratory. - PowerPoint PPT PresentationTRANSCRIPT
University of Bridgeport
School of EngineeringSchool of Engineering
Prof. Tarek Sobh
Vice President for Graduate Studies and Research Dean, School of Engineering

University of Bridgeport School of EngineeringSchool of Engineering
Capabilities and research facilities / groups
Multimedia Information Group Multimedia Information Group (MIG) Laboratory (MIG) Laboratory
COMPUTER SCIENCE & ENGINEERING DEPARTMENTCOMPUTER SCIENCE & ENGINEERING DEPARTMENTUniversity of Bridgeport, Bridgeport, CT
MIG@UB
• Multimedia Information Group @ UB– Department of Computer Science and Engineering at UB, CT
• Location: Charles A. Dana Hall #234
• People– Prof. Jeongkyu Lee– 2 PhDs and 2 MS students
• Collaborators– Prof. JungHwan Oh at UNT– Prof. Shou-jiang Tang at UTSW – Prof. Dongwon Lee at PSU
http://www.bridgeport.edu/~jelee/mig
UNIVERSITY OF BRIDGEPORTUNIVERSITY OF BRIDGEPORT
Multimedia Information GroupMultimedia Information Group
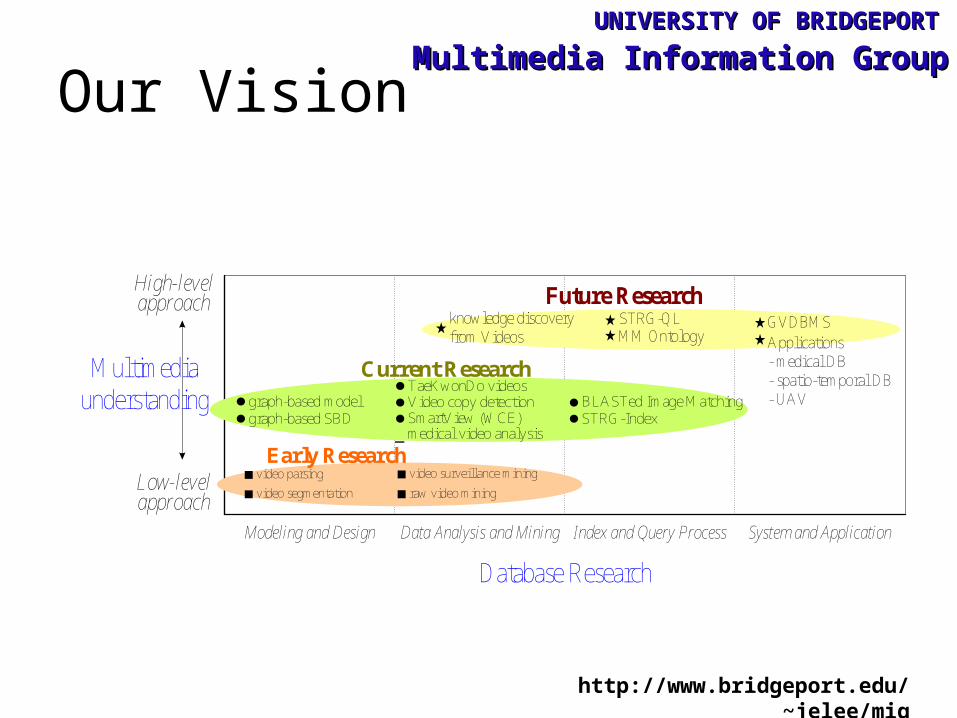
Our Vision
Modeling and Design Data Analysis and Mining Index and Query Process System and Application
Low-levelapproach
High-level approach
Database Research
Multimediaunderstanding
raw video miningvideo segmentation
video surveillance miningvideo parsingEarly Research
medical video analysisSTRG-IndexBLASTed Image Matchinggraph-based model Video copy detection
SmartView (WCE)
Current ResearchTaeKwonDo videos
graph-based SBD
GVDBMSApplications- medical DB- spatio-temporal DB- UAV
STRG-QLknowledge discovery from Videos
Future Research
MM Ontology
http://www.bridgeport.edu/~jelee/mig
UNIVERSITY OF BRIDGEPORTUNIVERSITY OF BRIDGEPORT
Multimedia Information GroupMultimedia Information Group
Active Research
http://www.bridgeport.edu/~jelee/mig
• Developing algorithms and S/W for event detections from WCE (Wireless Capsule Endoscopy) videos• Funded from IntroMedic, Co. Ltd., Korea• Collaborator: Dr. Tang at UTSW, Dr. Oh at UNT
TaeKwonDo project
Vlinkage: Video Linkage project Multimedia Ontology
SmartView project• Developing algorithm and prototype system for automatic judge of TaeKwonDo poomsae• Sponsor: International College at UB, WTF• Collaborator: Prof. Kim of Martial Art dept. at UB
• Developing a noble method for video and image matching• Applicatoin1: Video Copy Detection for YouTube• Applicatoin2: BIM (BLASTed Image matching)• Collaborator: Dr. Dongwon Lee at Penn State University
CNN
NBC
MLB
Movie
Search Policy
Find copied videos from Very Large Video Database
Scalability+
Search Content
based Video Search
• Developing a new algorithm for automatic generation of Multimedia Ontology• Target applications: Medical videos, Surveillance camera, and Military videos• Looking for sponsors
MIG
UNIVERSITY OF BRIDGEPORTUNIVERSITY OF BRIDGEPORT
Multimedia Information GroupMultimedia Information Group
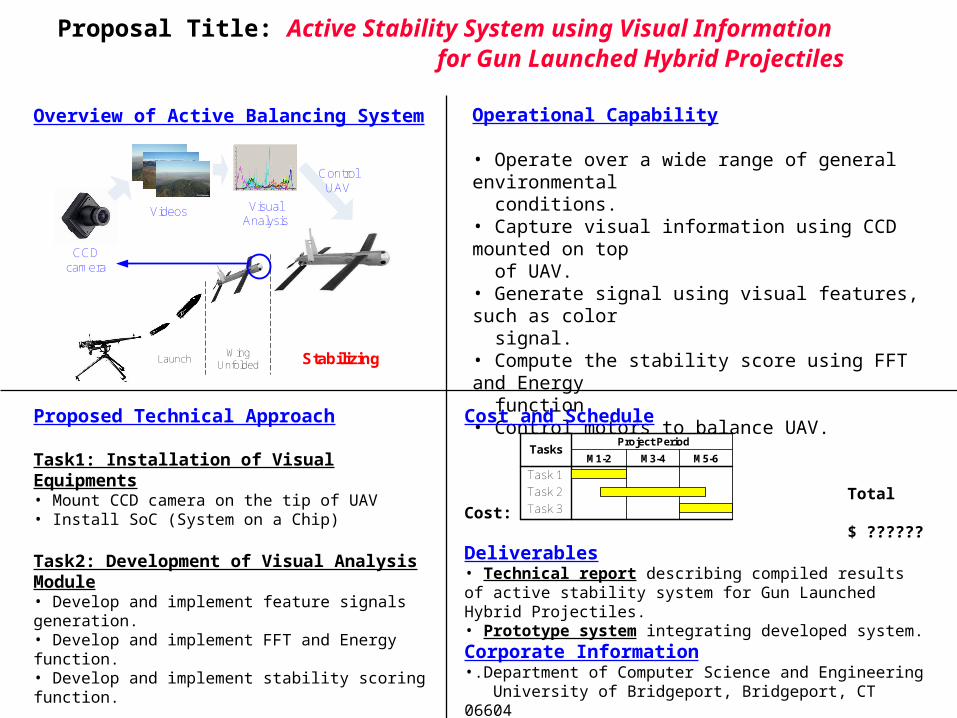
Proposal Title: Active Stability System using Visual Information for Gun Launched Hybrid Projectiles
Overview of Active Balancing System Operational Capability
• Operate over a wide range of general environmental conditions. • Capture visual information using CCD mounted on top of UAV.• Generate signal using visual features, such as color signal.• Compute the stability score using FFT and Energy function.• Control motors to balance UAV.
Proposed Technical Approach
Task1: Installation of Visual Equipments• Mount CCD camera on the tip of UAV• Install SoC (System on a Chip)
Task2: Development of Visual Analysis Module• Develop and implement feature signals generation. • Develop and implement FFT and Energy function.• Develop and implement stability scoring function.
Task3: UAV Control Module• Control UAV for stability.• Test the active stability system.
Cost and Schedule
Total Cost: $ ??????Deliverables• Technical report describing compiled results of active stability system for Gun Launched Hybrid Projectiles.• Prototype system integrating developed system.Corporate Information•.Department of Computer Science and Engineering University of Bridgeport, Bridgeport, CT 06604• Phone: (203) 576-4397, Fax: (203) 576-4765• Email: [email protected] (Dr. Jeongkyu Lee)
LaunchWing
Unfolded Stabilizing
CCD camera
Videos Visual Analysis
Control UAV
M1-2 M3-4
Project Period
M5-6Tasks
Task 1
Task 2
Task 3

Robotics, Intelligent Sensing and Control Lab (RISC)
University of BridgeportSchool of Engineering
Outline of Outgoing Project• Online Automation and Control: An Experiment in Distance Engineering
Education
• E-Learning: Case Studies in Web-Controlled Devices and Remote Manipulation
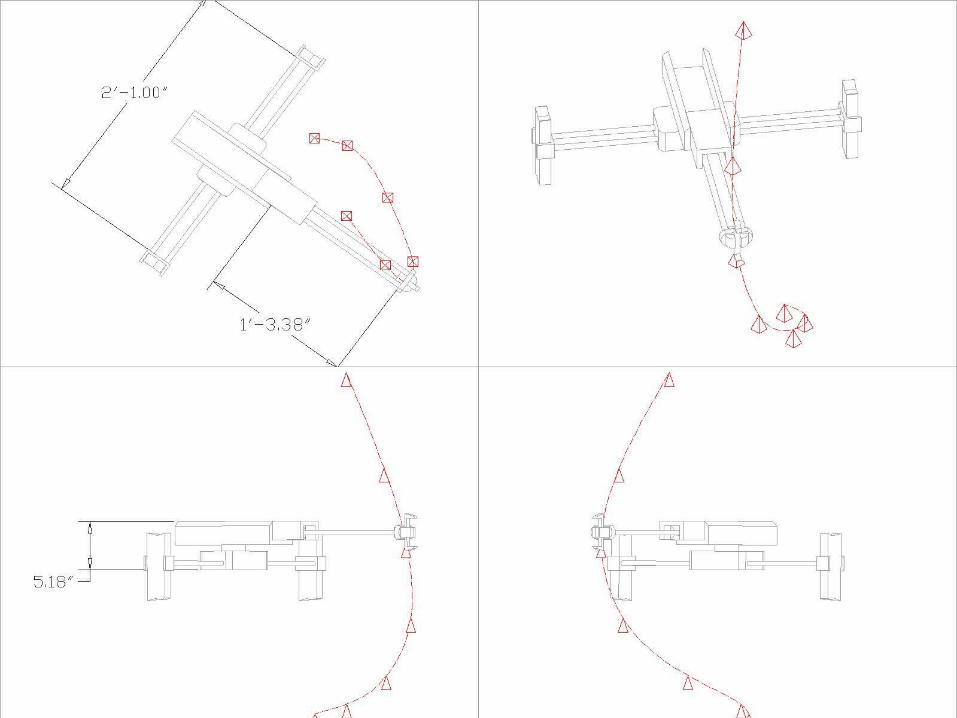
• Prototyping Environment for Robot Manipulators
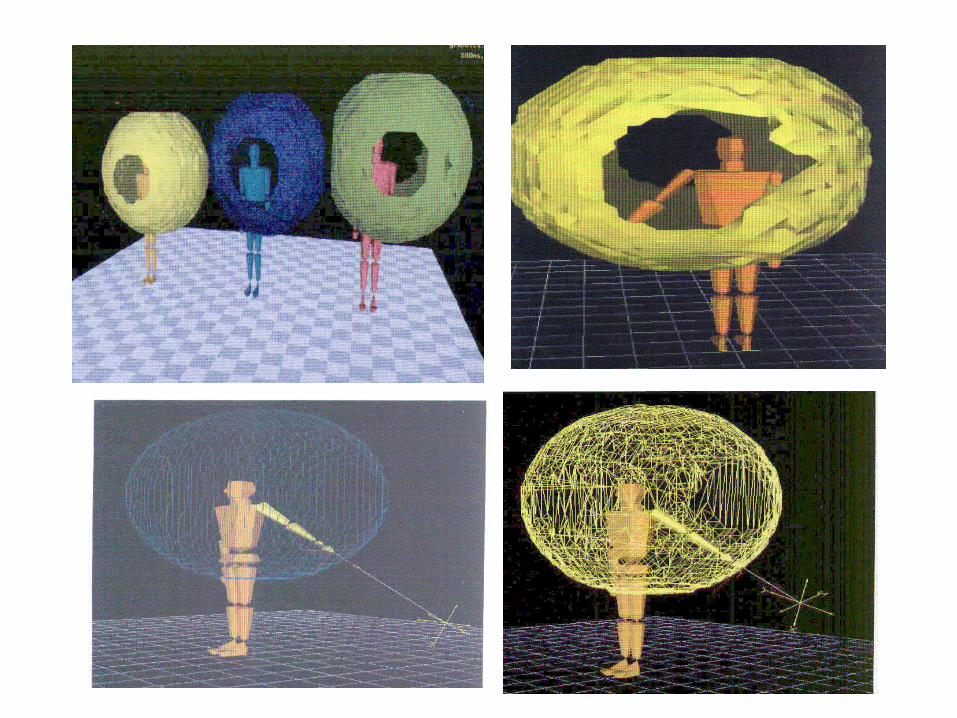
• Manipulator Workspace Generation and Visualization in the Presence of Obstacles
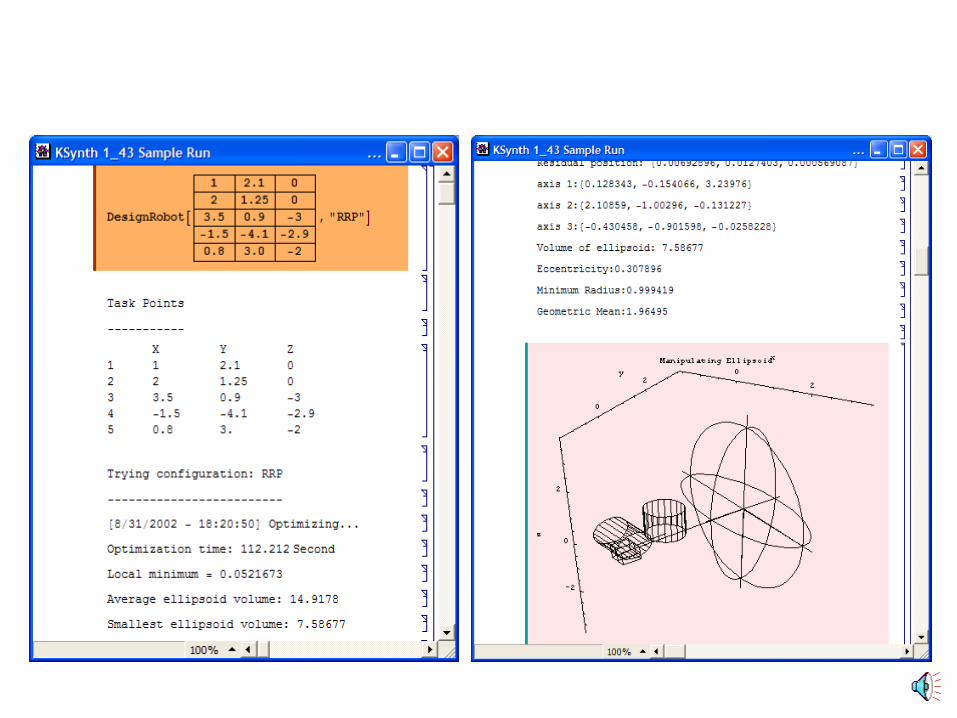
• Kinematic Synthesis of Robotic Manipulators from Task Descriptions
• New concept in optimizing the manipulability index of serial Manipulators using SVD method
Outline of Outgoing Project• Recovering 3-D Uncertainties from Sensory Measurements for
Robotics Applications
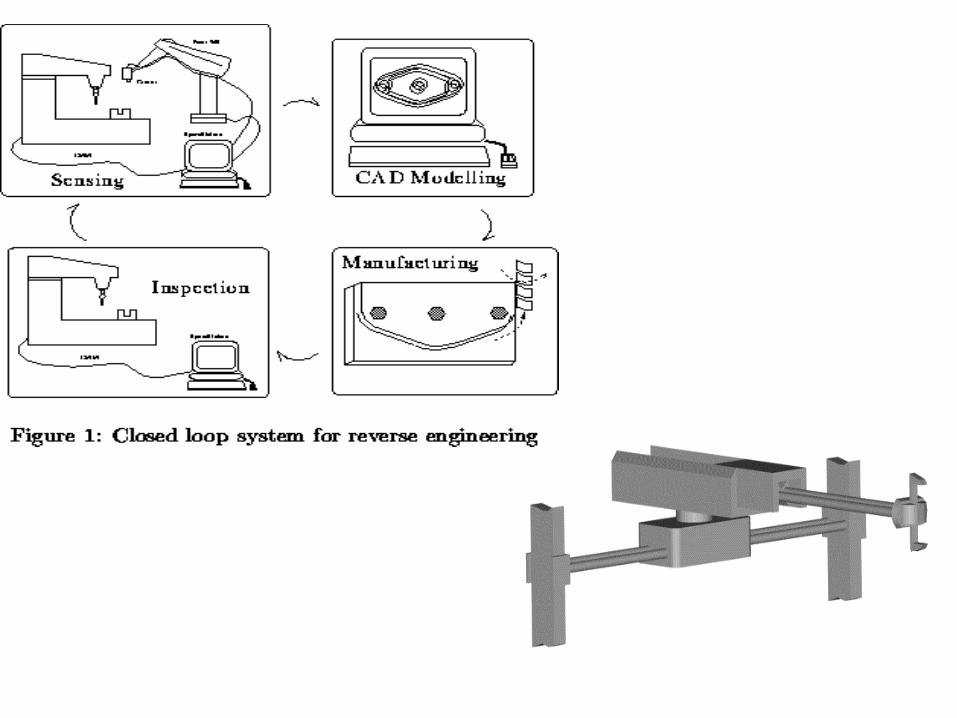
• Industrial Inspection and Reverse Engineering
• Sensing Under Uncertainty for Mobile Robots
• Robot Design and Dynamic Control Simulation Software Solutions From Task Points Description.
• RISCBot II
Online Distance Laboratories
• Using Automation and Telerobotic (controlling devices from a distance) systems
• Real-time laboratory experience via the internet
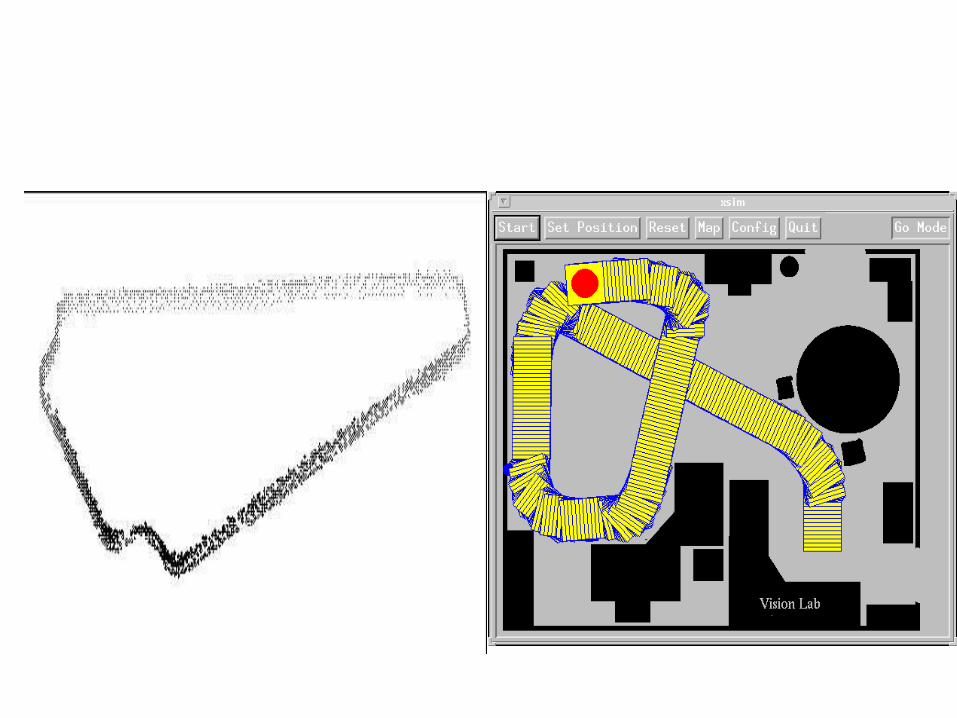
1. Tele-operation of Mitsubishi Movemaster2. RISCBOT – A Web Enabled Autonomous Navigational
Robot3. Tele-operation of the FESTO Process Controller
Capabilities and Research Facilities
• Sensing under uncertainty.• Sensor-based distributed control schemes.• Control and planning for autonomous mobile systems.• Modeling and recovering uncertainty in 3-D structure and motion. • Dynamics and kinematics generation and analysis for multi-DOF robots.• Active observation and control of a moving agent under uncertainty.• Automation for genetics application.• Manipulator workspace generation in the presence of obstacles.• Turbulent flow analysis using sensors within a DES framework
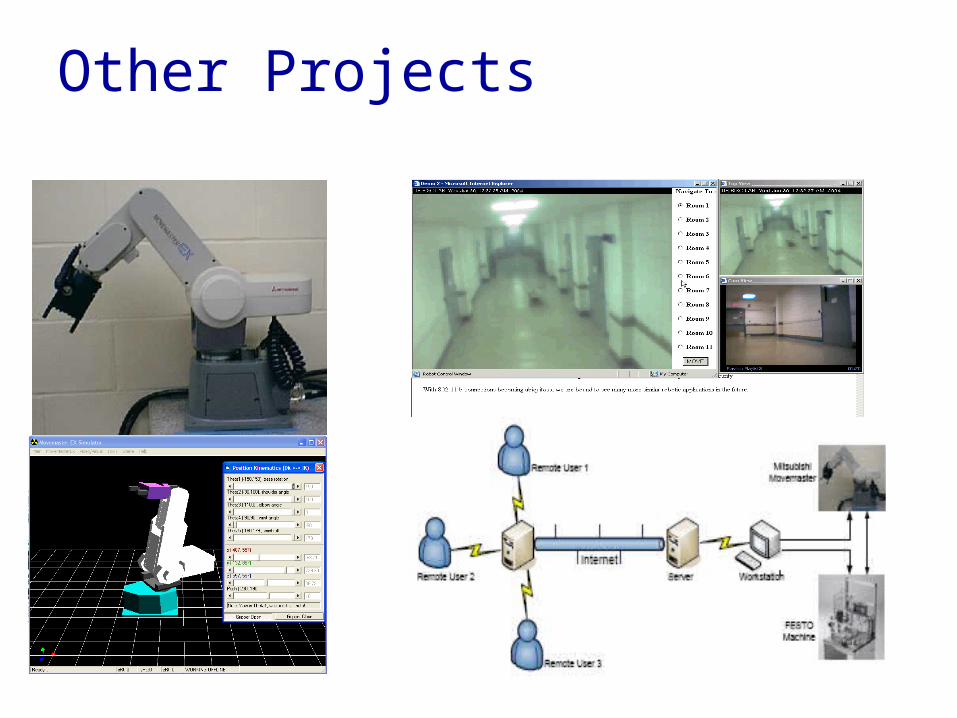
Other Projects
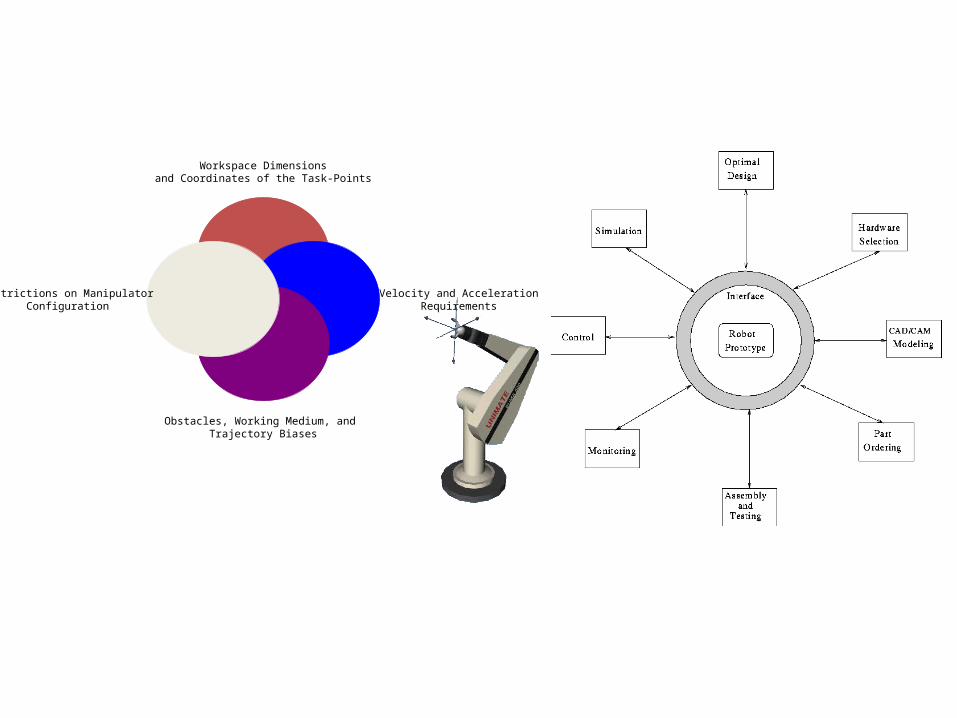
Workspace Dimensionsand Coordinates of the Task-Points
Velocity and AccelerationRequirements
Obstacles, Working Medium, and Trajectory Biases
Restrictions on ManipulatorConfiguration
School of EngineeringUniversity of Bridgeport
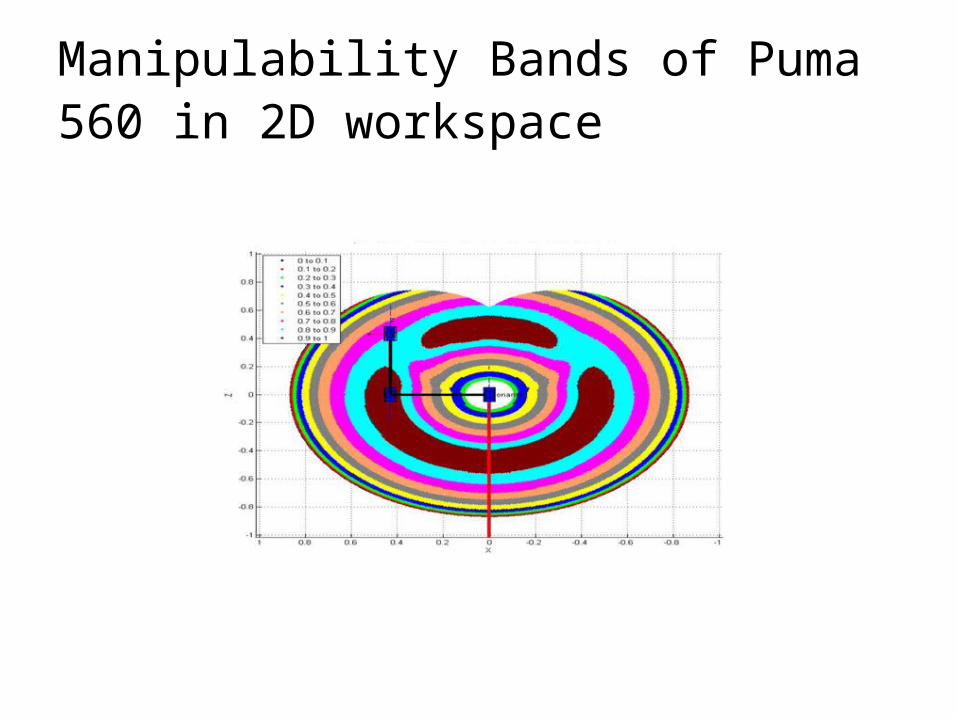
Manipulability Bands of Puma 560 in 2D workspace
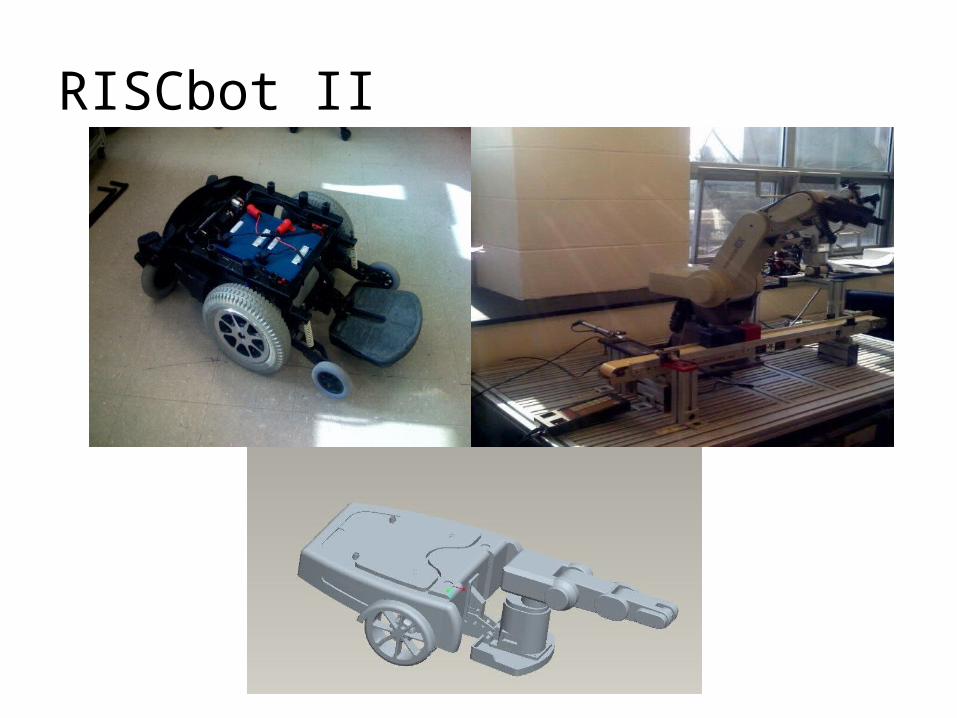
RISCbot II
CT Post
Wireless & Mobile Communications Wireless & Mobile Communications (WMC) Laboratory (WMC) Laboratory
COMPUTER SCIENCE & ENGINEERING DEPARTMENTCOMPUTER SCIENCE & ENGINEERING DEPARTMENTUniversity of Bridgeport, Bridgeport, CT
WMC Current Research Projects WMC Current Research Projects
1. Wireless Multiuser Communications for Cellular and Mobile Networks
• BER and SNR Analysis of DS-CDMA Cellular Networks
• Multiple Access interference (MAI) Cancellation for Wireless Multiuser Receivers
• Analysis of Processing Gain for Wireless Multiuser DS-CDMA Systems
• Computational Complexity and Algorithm Optimization for 3G Cellular Networks
WMC Research ProjectsWMC Research Projects
2. Wireless Mesh Networks• The Use of Orthogonal Frequency Code Division
(OFCD) in Broadband Wireless Mesh Networks
• Efficient Routing Algorithms for Wireless Mesh-Hypercube (M-H) Networks
WMC Research Projects (Cont..)WMC Research Projects (Cont..)
3. Mobile Ad Hoc Networks (MANET)• The Best and Worst Case Capacity Analysis of MANET
• Efficient DSR Based Routing Scheme for MANET
• Minimizing the Malicious Behavior of Mobile Nodes for Maximizing the MANET Data Throughput
4. Wireless Sensor Networks1. Resource Optimization in Wireless Sensor Networks Via
Self-Adaptive Methodology
2. Minimizing the Energy Consumption of Wireless Sensor Nodes Using Active Node Optimization Method

Related Recent ResultsCDMA Receiver: Multiuser Receiver
• A class of CDMA receivers known as multiuser receivers
• It exploit the available information about the spreading sequences and mobile channel impulse responses of all the CDMA users
• The goal is to improve the performance of the wireless CDMA users
Classification of CDMA detectors
WMC research group focuses on this part
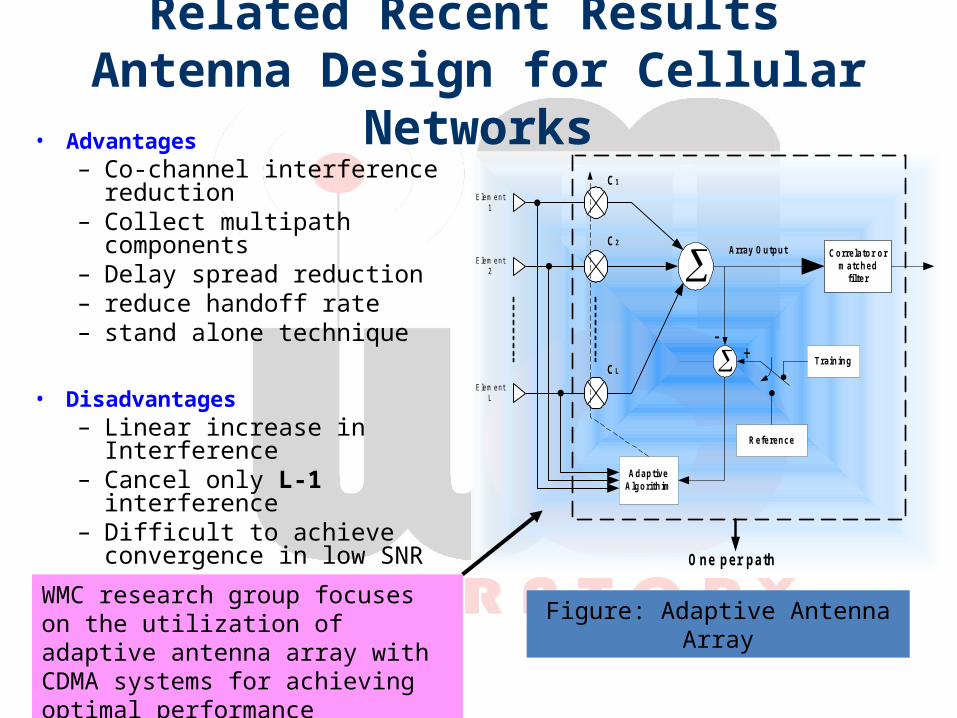
Related Recent Results Antenna Design for Cellular Networks
• Advantages– Co-channel interference
reduction– Collect multipath components– Delay spread reduction– reduce handoff rate– stand alone technique
• Disadvantages – Linear increase in Interference– Cancel only L-1 interference– Difficult to achieve convergence
in low SNR
Correlator ormatched
filter
Training
-+
Reference
AdaptiveAlgorithim
C1
CL
C2
Elem ent1
E lem entL
E lem ent2
Array Output
One per path
Figure: Adaptive Antenna ArrayWMC research group focuses on the utilization of adaptive antenna array with CDMA systems for achieving optimal performance
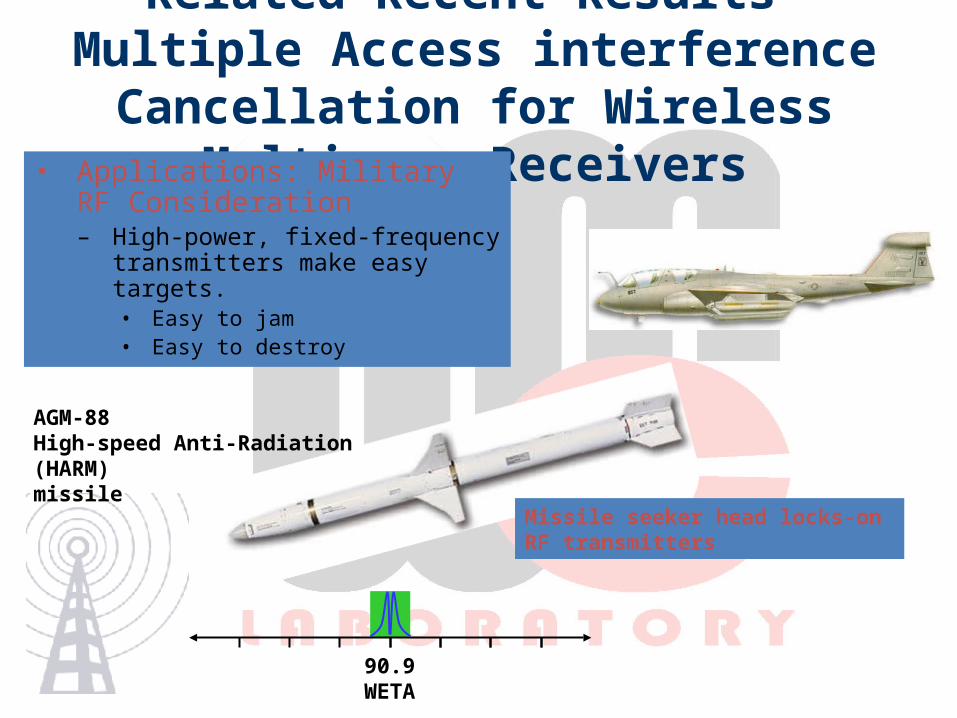
Related Recent Results Multiple Access interference Cancellation
for Wireless Multiuser Receivers• Applications: Military RF
Consideration– High-power, fixed-frequency
transmitters make easy targets.• Easy to jam• Easy to destroy
90.9WETA
Missile seeker head locks-on RF transmitters
AGM-88High-speed Anti-Radiation (HARM)missile
University of Bridgeport Faculty of EngineeringFaculty of Engineering
Other relevant faculty expertise
Ausif Mahmood
• Video analysis, capture and processing.
• Signal processing.
• Video and data compression technologies.
• Electronics circuit design.
Ausif Mahmood
• Image processing projects such as Object recognition, Face Recognition using Eigen Faces and 2-D FFT.
• Developing various hardware prototypes based on microcontrollers such as controlling image capture.
• Hardware and software development, including having developed some commercial projects involving wireless communication, GPS tracking, and RS-232 communication.
Navarun Gupta
• Programming a real-time digital signal processing (DSP) chip to do specific tasks like filtering, image processing and mathematical calculations.
• Implementing such an autonomous image tracking / detection system.
Neal Lewis and Elif Kongar
They can assist with various forms of simulation including:
• Fluid dynamics of airborne objects.• Sensitivity analysis using Monte Carlo techniques • Simulation of multi-step operations using Arena
software. • Simulation and Six Sigma techniques which are
recommended in the design stage of the small size product to maximize product reliability.
Xingguo Xiong
• Low power VLSI circuit design and VLSI testing. For the flying UAS bullet project, low power circuit design reduces the power consumption of the control circuits so that the battery life can be extended.
• MEMS (Microelectromechanical Systems) and nanotechnology. By using MEMS technology, the size, weight and cost of the UAS bullet can be greatly decreased. For example, he can develop the MEMS micromotor and other various MEMS sensors/actuators for the UAS bullet.
• Performing shock and vibration simulation/testing for the UAS bullet.
Saikat Ray
• Target demo: A UAS hanging by a thread with (micro)-motors installed for bending the wings. The wings are controlled from a laptop/PC through wireless link.
• Building the wireless link (system) with relatively small form factor.
Lawrence Hmurcik
• Electronics circuit design • Microelectronics • Signal processing • Controls • DSP • Circuit Design / Analysis • Simulation • Micro Electronics/ MEMS
