unit commitment using a stochastic extended neighbourhood search
TRANSCRIPT

Unit commitment using a stochastic extended -
neighbourhood search
G.K. Purushothama, U.A. Narendranath and L. Jenkins
Abstract: A simulated annealing is combined with a tabu search, to develop a robust and powerful optimisation technique for solving the unit commitment problem. The problem is broken down into a combinatorial subproblem in unit status variables and a quadratic programming subproblem in unit power output variables. The combinatorial subproblem is solved using the proposed method. In the hybrid algorithm. which is referred to as a stochastic extended neighbourhood search, simulated annealing is used as the main stochastic algorithm. and a tabu search is used as an extended neighbourhood search, to locally improve the solution obtained by simulated annealing. The neighbourhood search uses local domain-knowledge, which results in rapid convergence of the simulated annealing algorithm. The results obtained for several example systems illustrate the potential of the hybrid approach.
1 Introduction
Unit commitment is a complex decision-inaking process because of multiplc constraints of the problem [l]. Due to its goal, the unit cominitment problem (UCP) is mathema- tically formulated as a nonlinear_ largc-scale, mixed integer constrained optimisation problem. Several unit commit- ment methods based on mathematical and heuristic optimisation techniques, including AI methods, have been proposed; they have had varying degrees of success with respect to solution time and optiniality [2].
Recently, local improvement AI methods have been used incrcasingly as optiniisation techniques. These methods use meta-heuristics to find good solutions in an acceptable time to difliicull optinnisation problems. The meta-heuristic is a general framework for heuristics in solving hard optimisa- tion problems. The heuristic strategies that are used in AI arc largely based on some natural metaphor. Simulated annealing (SA) is a meta-strategy which is modelled on the anncaling concept, derived from material science. while. a tabu search (TS) is another meta-strategy based on memory response.
SA is a powerful general purpose stochastic search technique used to solve hard constrained optimisation problems [3]. Although it takes a long time, it has many good features; it is easy to implement, requires little expert knowledge, and is not memory intensive. Further, it can start with any initial solution and improves on it to find a near-optimal solution with a high probability. In [4, 51 SA has been used to solve UCP.
TS is another meta-heuristic method that uses the history of the search. It is a particularly successful strategy for solving conibinatod optimisation problems. The central idea of the method is the use of adaptive memory to prevent
convergence to local optima. by driving the search to different parts of the search space TS can be used independently as an optimisation procedure or it can be used as a supplement to any other method in order to improve the solution produced by that method. TS bas also been used to solve the UCP [6].
SA and TS are both simple to implement and locate near- optimal solutions to typical optimisation problems such as UCP. However. they take a long time to arrive at the global solution. Many advanced operators are proposed for reducing the search time to acceptable values, but these sophisticated operators are problem specific and sensitive to the control parameters [7, SI. Hence, hybrid combinations of different methods have been proposed for obtaining a robust optimisation method [9: IO].
We propose a hybrid algorithm using TS as an extended neighbourhood search to the SA. The thorough neighbour- hood search capability ofTS is used to improve the solution obtained by the SA. Several examples are solved and the results are promising.
2 Problem formulation
UCP is a constrained optimisation problem, which is difficult to solve because of the different types of variables and the coupled constraints. Traditionally, the main objective in this optimisation problem is to minimise the total operating cost of the system over the scheduling time horizon, while respecting various physical, operational and contractual constraints.
The total operating cost includes fuel costs and startup costs. We have taken the fuel costf;(pi,), for generating a power of pi, units by unit i at time f as:
f ; ( p i t ) = ~ + b i p i t + ~ i p ; ( 1 )
where U,, b , ci are coefficients of cost function The start-up cost Si, of unit i is:
S, = .Wl ~ ~ r [ ~ ~ ~ ( - ~ / / . i / ~ ~ i . i ) l } + (2)
where Sui is the cold startup cost of unit i, and d,, e; are startup cost coefficients of unit i.
61
If ti,, is the unit startup status: vi,= I, $the unit iis started at hour I; 0 otherwise, and U;, is the status of unit i at time f (ON = 1; OFF=O), the objective function is to minimise the total cost Fr, of N generating units over a scheduling period T, i.e.
7 N
MinFr =CCfi(pi,)rr,, + ~ i , o ; , (3) ,=I , = I
Subject to:
(a) power balance constraint:
where Po, is thc demand at time 1:
(b) spinning reserve constraint:
where Pnn is the inasimum power of unit i, and PRi is the reserve required at time I ;
(c) unit capacity limits:
uirpn,; 5 Pi, 5 pM;u,, (6) where P,,, is minimum power of unit i; (d) the minimum up/down time constraints
Toffi 2 Tdn;; Toni > Tup; (7) where Tupi, Tdn; are minimum up/down time of unit i, and TOJI;; Tofi. are on/off time of unit i: (e) initial condition.
While there may be other constraints, such as ramp rates, crew constraints etc.. we consider only the above constraints.
The economic dispatch is a real-time control problem and is mathematically formulated as:
A‘
~ f i t p ; , ~ ~ i t ~ ~ I=I pi+(;, = pnr } vt (8) ,=I
In this work, we refer to any unit commitment schedule satisfying constraints (b), (d) and (e) as a feasible solution. These constraints involve only the integer variables, and the combinatorial optiinisation problem detennines suc.h a feasible solution. Thc solution to the economic dispatch problem then has to determine the generation levels of all online units so as to minimise fuel costs, while satisfying the constraints I and 3. We develop a new method for soliing the combinatorial optiinisation problem, and a quadratic programming routine is used to solve the economic dispatch problem.
3 Simulated annealing
SA models the process of annealing in solids. Kirkpatrick el d. [3] adopted the idea of SA for solving difficult combinatorial problems. This SA procedure has heen successfully applied to a range of combinatorial problems in electrical engineering including power systems.
Essentially, the SA optimisation technique uses the Metropolis algorithm [ I l l to generate a sequence of solutions, which are successively modified until a stopping criterion is satisfied. A temperature parameter is used to control the acceptance of modifications. Initially, the temperature is set to a high value and is decreased over iterations. If the modified solution has better fitness value
68
than the current solution, it replaces the current solution. If the modified solution is less fit, it is still retained as current solution hut with a probability Pv(A)= {I/( I +exp(A/C))) where A is the deterioration of the trial solution and Cis the current temperature. As the algorithm proceeds. the temperature heconies cooler. and it is then less likely to accept deteriorated sohitioils.
In the basic SA algorithm, an initial solution is geiierated randomly, and is set as the current solution. A trial solution is generated from the current solution, and is either accepted or rejected to replace the current solution. In each itera- tion, thc process of generating and testing a new trial solution is repeated for a specified number of trials, to establish the ‘thermal equilibrium’. The last of the accepted solution becomes the initial solution for the next iteration, after the temperature is reduced. according to the ‘annealing schedule’. Thus the main features of the SA process are: the transition mechanism; and the cooling scheme. The transition mechanism consists of three components:
(a) generation of candidate solutions by perturbation of the current solutions according to a probabilistic distribution function; (b) acceptance test for the solutions based on better objective values or a probability of acceptance in case of higher objective values; (c) iterative procedure.
In the last component, the first and the second components are used to produce a chain of tested candidate solutions. The last accepted solution becomes the initial solution of the nest iteration.
The procedure by which the control temperature parameter is reduced is called the cooling (annealing) schedule. It is very critical to the success or the SA.
4 Tabu search
TS is a meta-heuristic local improvement method that uses the history of the search. It is a particularly successful strategy for solving many practical combinatorial optimisa- tion problems [12. 131. It uses a flexible memory system. in contrast to memoryless systems such as SA, and to rigid memory systems such as the branch and hound method. The central idea of the method is the use of this adaptive memoly, which prevents convergence to local optima, by driving the search to different parts of the search space. TS can be used independently as an optimisation procedure or it can he used as a supplement to any other method to improve the solution produced by that method.
TS begins with an initial solution and proceeds iteratively from one solution to another until a termination criterion is satisfied. The transition froin one solutio11 to another is called a move. Specifically. a move is defined as a function which transforms a solution to another solution by well- defined operations. For any solution; application of possible moves generates set of solutions called the neighbourhood of the original solution.
At each iteration, the neighbourhood of the current solution is searched, in order to find the best neighbour. The best neighbour may either result in the best possible improvement or the least possible deterioration of the objective value. This move. leadiiig to the hest neighbour, is performed and then the newly obtained solution is set as the primal for the next iteration.
IEE P~oc-G~w.rlcr ‘ r r u w ~ ~ . l ~ ; . s i r ; l ~ , Voi 150, No. I . Juruian. 2003

To prevent the search from revisiting the same solutions, and to lead the search to 'good regions' of the solution space, the search history is retained in the memory, and used in the search. This is accomplished by a short-term memory called a tabu list. A tabu list does not peimit certain moves, called tabu (restricted) moves, so that the solutions visited in the recent I moves are discarded, where I is the size of the tabu list. However, if a restricted move is advantageous, the restriction may he overruled by an aspiration criterion.
function evaluations, and hence takes a long solution time, advanced opcrators can be used to obtain good solutions in an acceptable time duration. The basic method can also be used as an extended neighbourhood search to find better solutions near the ones obtained by other methods such as Lagrangian relaxation, or SA. The neighbourhood of a solutioii in a promising region of the solution landscape can he thoroughly searched using the TS method. TS has also been used to solve the UCP [6]. Xim cf al. [I41 proposed an extended search algorithm involving Lagrangian relaxation method and TS. Mantawy et a/. [I51 proposed a combined algorithm using CA and TS for the solution of UCP.
5 Stochastic extended neighbourhood search
SA and TS are nieta-heuristic methods based on two different natural metaphors: annealing in mateiial science; and memory response, respectively. Both are iterative improvement methods applicable specifically to hard combinatorial optimisation problems.
The SA algorithm moves after checking one neighbour. The past history does not influence the current move. This could lead to raiidoin hopping due to which the asymptotic perfoiinance could be worse than the repeated random local miiiiinuin search. TS is slow and thorough, compared to SA. TS moves after evaluating the entire neighbourhood. TS uses the same amount of information to perfonn one move as SA uses in N moves.
The SA promises the statistical certainty of finding the global optimum solution, if. large nuniber of iterations with sufficicntly slow cooling rate are used. The statistically biased random transition provides the SA with a chance to come out of a local optimum, particularly iii the early stages of the search process. But_ the same random transition is problematic, as the convergence is slow. particularly in the later stages of the search. Since TS is a thorough neighbourhood search, it can he used to curtail the disadvantageous random transitions, particularly in the later part of the SA algorithm.
Thus, each of thcse methods has its own strengths and weaknesses. We intend to gaiii from the strengths of both methods, when used co-operatively in a combined algoiithni.
A hybrid algorithm using the SA technique for assurance of the global solution and TS for local search in the neighbourhood of a current solution is proposed for solving the power system UCP. We refer to this methodology as il stochastic extended neighbourhood search. Thc SA will sample the complete solution space, while the restricted moves ofthe TS will guide the solution to converge locally quickly.
6 Proposed algorithm
In the proposed stochastic extended neighbourhood search, the SA technique is suspended temporarily at specified points, and one shifts to the TS method for a neighbour-
Although in its basic fonn? TS requires a large number of.
IEE Zr0c:Gen~r. Ihinmi. Dimib., RI/. 150. h'o. 1. J l i a i r q Z(N3
hood search. After the TS is completed, the algorithm returns to the SA technique. We refer to the algorithm as simulated annealing with a tabu search (SATS).
6.7 Algorithm SATS
Step I : Initialise the teniperature to CA; and set the iteration counter k=O. stcq) 2: Randomly generate an initial feasible solution, and evaluate the cost function, which includes fuel costs and startup costs. Set this solution to the current best solution U;, with the cost value F,. step 3: Find a next-neighbour trial solution V,, and evaluate its cost function Ft step 4: Perform the acceptance test: (a) if 52 F;, accept as the current best solution. Set U-= U.
(b) else if esp[(Fi-~/C,)]~uanr/o,n(O, I), accept V, as current best solution. Set Ui= U, (c) otherwise reject the trial solution V, St1p 5: If the equilibrium condition is satisfied (the specified number of transitions at the current temperature are completed), go to Step 6. Otherwise go to Step 3. Step 6: Perform an extended neighbourhood search around the current solution. using TS, by repeating the following steps for a specified number of iterations: (a) create a candidate list of moves in the neighbourhood of the current solution. (b) cvaluate each solution, and find the hest move (solution) in the neighbourhood. (c) update the current solution. (d) update the tabu list, by inserting the move correspond- ing to the current solution, with its cost as the correspond- ing aspiration level. Step 7: If the stopping criterion is satisfied, stop. Otherwise. decrease the temperature C,, set k = k + I , and go to Step 3.
, I
6.2 Random perturbation The algorithm begins with a randomly chosen feasible solution as the current solution. We then need a procedure to find a feasible trial solution from the random pcrturha- tion of the current solution. The technique we use is a modification of the one used by Mantawy et U/ . [5_ 16, 17.
The hasic idea behind the technique is the random perturbation of the current solution. Given a current solution (a commitment schedule denoting the on/off status of the N generating units over the T hours), randomly select a generating unit i, and an hour l . The current solution is examined to find the state of generating unit i, at hour I . If the state is on, the modification is to change the state to OR, in some of the hours around the hour t . Similarly. if the state is off, one changes it to on. To ensure that the selected change of state does not violate the minimum uptime and
69
the minimum downtime requirements of the unit. we use the following procedure.
Let the selected unit n be in the off state in the selected hour I . We determine the number of successive hours, inclusive of hour 1: for which the unit n is in the off state. Let the number of such hours be L. If L= Tdn;, the status of the unit is changed to on ovcr all these L hours. On the other hand, if (L-Tdn;)= J , where J > 0 , we have some flexibility. We can change the status of the unit from off to on for j successive hours, either at the beginning or at the end of the interval. where 0<j /qJ . The unit will now be in the on state Tor (L-J) successive hours. To implemcnt this random perturbation of the solution, we first randcmnily choose between the beginning and the end of the inteival, and then randomly generate j , such that j has equal probability of taking each integer values between I and J. This way of perturbing the solution more cffectively explores the space around the current solution than was possible with the scheme used by Mantarry [SI.
If the selected unit is in the on state in the hour f , we follow a similar approach. If the on interval is equal to Tup,, we change the status of the unit to off over the entire interval. If it is greater than Tup, one has the flexibility in changing the status_ at either the beginning or at the end of the interval, and in determining the number of hours in which the status is changcd.
Further, an on to off state transition is not permissible if the combined capacity of the remaining units in the on :itate is insufficient to meet thc load plus the spinning resenre in that hour. In this case, the transition to the next solution h l s ; the random generator is then used to select another generating unit and hour, in which the current state can be changed. A geometric cooling schedule is used for annealing.
6.3 Extended neighbourhood search In Step 6 of the algorithm SATS, we make an extended neighbourhood search using a tabu search. This will enable further performance gains to be obtained through local domain-knowledge.
To begin this procedure, we have the current solution U, with a cost value 4. We crrate a list of solutions that arc all neighbours to the current solution by the perturbation mechanism. We then examine each of these new solutions to find whether it can replace the current solution according to the tabu search method.
The tabu list is implemented as a 'first in first out' queue of finite lengh this length is called the size of the list. The size has a strong bearing on the performance of the algorithm. Based on the results in [IX], we use a value of 7 as the length for our simulation studies.
7 Numerical results
The algorithm SATS has been implemented in C + + ,on a 60MHz Pentium PC. The performance of the algorithm has k e n evaluated through simulation. Simulation studies have been carried out on three systems. over a schediiling time horizon of 24 hours. These three example systems are taken from [19-211. Two of the three systems have ten units each [19, 201, and the third system is a 26-unit system [21]. These three systems had previously been scheduled using Lagrangian. Relaxation [19], integer programming [20], and earlier versions of the SA and TS algorithms, as proposed by Zhudng and Galiana [4] and by Mantawy t i a/, [5, 61.
To observe the variation in the performance due to the stochastic nature of the proposed algorithm, LI total of ten runs were taken for each example system. In each run, the
70
control parameters rcmained the same, and only the seed for the random number generation was changed. The multiple runs are carried out only to validate the algorithm. Once it has been validated, a single run is sufficient to obtain the desired solution under t-eal-time operating conditions.
After fine tuning, the following values for the control parameters have becn used.
SA puraiiiefer.s:
(a) initial temperature= YO0 (b) final temperature = 0.001 (c) number of transitions at each teinperttture= 50 (d) geometric annealing schedule. TS paranieters:
(a) tabu list size = 7 (b) number of iterations = 20.
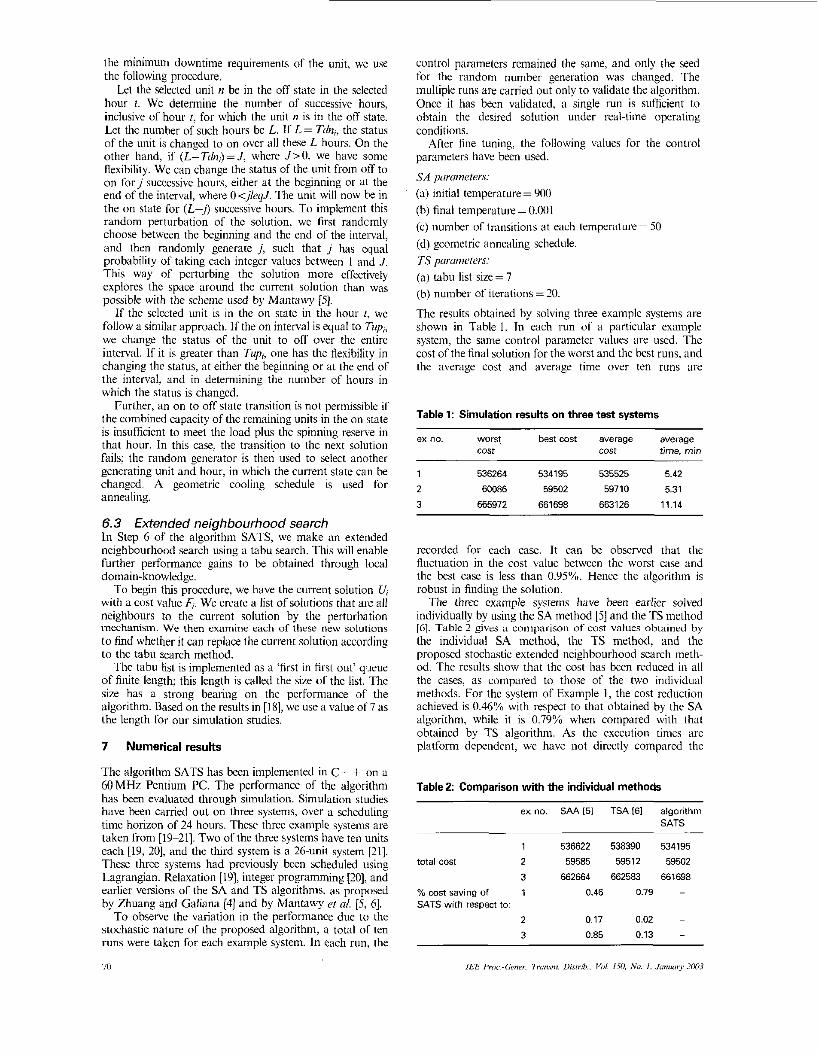
The results obtained by solving three example systems are shown in Table 1. In each run of a particular example system, the same control parameter values are used. The cost of the final solution for the worst and the best runs, and the average cost and average time over ten runs are
Table 1: Simulation results on three test systems
ex no. worst best cost average average cost cost time, min
1 536264 534195 535525 5.42 2 60086 59502 59710 5.31 3 665972 661698 663126 11.14
recorded for each case. It can be observed that the fluctuation in the cost value between the worst case and the hest case is less than O.YS"/,. Hcncc the algorithm is robust in finding the solution.
The three example systems have been earlier solved individually by using the SA method [SI and the TS method
the individual SA method, the TS method, and the proposed stochastic extended neighbourhood search meth- od. The results show that the cost has been reduced in all the cases, as compared to those of the two individual methods. For the system of Example I, the cost reduction achieved is 0.46% with respect to that obtained by the SA algorithm. while it is 0.79% when compared with that obtained by TS algorithni. As the execution times are platform dependcnt, we have not directly compared the
[6]. Table 2 givcs a comparison of- cost values obtained by
Table 2: Comparison with the individual methods
ex no. SAA 151 TSA 161 algorithm SATS
~
1 536622 538390 534195 total cost 2 59585 59512 59502
3 662664 662583 661698 % cost saving Of 1 0.46 0.79 - SATS with respect to:
2 0.17 0.02 ~
3 0.85 0.13 -

solution times. However, due to the increased rate of convergence at each temperature of the SA algorithm, fewer function evaluation (transitions) are requircd to reach the thermal equilibrium, and there is a significant reduction in time overhead. The SA method requires more than 150 transitions to reach equilibrium, while only less than 50 transitions are found to be sufficient when local search is used. The TS similarly requires more than 100 solutions in the neighbourhood set, and takes more iterations when compared to the SA method [6]. Thus, the algorithm SATS performs better than either of the individual methods, in terms of both time efficiency and solution optimality. Furthermore, fine-tuning the values for control parameters in case of the individual methods is more laborious (requires several trial runs), while the hybrid method is less sensitive to the variation in values of the control parameters than in the case of the individual methods, and hence is more robust.
The system of Example I has been previously scheduled by the traditional Lagrangian relaxation method [19], and that of Example 2 by the integer programming method [20]. Table 3 presents a comparison of results obtained by using the proposed Algorithm SATS for Example Systems 1 and 2, with those obtained by the above methods. The results shows the improvement in the costs of solutions achieved by algorithm SATS over these other methods. The cost has been reduced by 1.25% with respect to that obtained by the Lagrangian relaxation method for Example system I , while a reduction in cost of 1.96% has been achieved for Example system 2 when compared with the result obtained by the integer programming method. Although the comparison has been made with best case results, even our worst case cost values are lower than those of the earlier studies. We do require more execution time when compared with the Lagrangian relaxation method. due to the nature of the basic SA technique, but this is acceptable, given the improvement in the quality of the solution.
Table 3 Comparison with LR and IP method
ex no. SATS LRA [191 IPA 1201 algorithm
total cost 1 534195 540895 -
total cost 2 59502 - 60667 %saving 1 1.25 0 ~
%saving 2 1.96 0 -
To investigate the scalability of the technique, we carried out simulation on IO-, 20-, 40-, 60-, 80- and 100- unit systems. The larger systems are obtained by an appropriate scaling of a 10-unit system. For this purpose, the IO unit system of Example 1 is taken as the base unit. To obtain the 20-unit test system, each of the I O units of Example 1 was duplicated, and the load demand at each hour was doubled. The problem data of the 10-unit base system were similarly scaled for the other larger systems. Although such duplication does not create the true diversity of a typical large system, we believe that this approach does demon- strate scalability of the technique, which is not influenced by any pair of units being identical to one another. For each case, ten runs are taken. and Table 4 presents the cost of the worst solution, the cost of the hest solution, the average cost, and the difference between the worst and the hest cost in percentage for 10 runs. In each case the control variables
TEE Pruc-Geer. Tramm Diilrib.. Vol. 150, No. 1. Janwrs ZW3
Table 4 Summary of results for large-scale problems
SI. no. of worst best average percentage no. units cost cost cost difference
1 10 538264 534195 535525 0.76 2 20 1049512 1043020 1045192 0.62 3 40 2078490 2061120 2067240 0.85 4 60 3176660 3160480 3167370 0.52 5 80 4278194 4238155 4256537 0.93 6 100 5395876 5363962 5386193 0.59
are set to the corresponding best values, and only the starting solution is arbitrarily generated. The results indicate that the method can be effectively used for large power systems.
8 Conclusions
A new hybrid algorithm, stochastic extended neighbour- hood search_ is proposed. The algorithm combines the SA and TS. TS is used as an extended neighbourhood search in association with SA, to integrate the main features of both the methods. Only the basic operators of both SA and TS are used. In the hybrid approach, TS makes a thorough search in the neighbourhood of the solution obtained by SA, thereby accelerating the convergence of the algorithm. The results obtained show that the approach is promising, and indicate that the technique can be used in energy control centers, to achieve a considerable saving in operational cost.
9
I
2
3
4
5
6
7
8
9
I O
II
12
13
14 15
References
WOOD. A.J., and WOLLENBERG. B.F.: 'Power generation. openlion and control' (John Wilcy. Chichester. UK. 1984) SEN. S., and KOTHARI. D.P.: 'Optimal thcmial generating unit commitment: a review-. Eleecrr. Poiwer Sj,sl. Res., 1998. 20, (7). pp. ML'tII
WOOD. A.J., and WOLLENBERG. B.F.: 'Power eeneration. openlion and control' (John Wilcy. Chichester. UK. 1984 SEN. S., and KOTHARI. D.P.: 'Optimal thcmial generating unit commitment: a review-. Eleecrr. Poiwer Sj,sl. Res., 1998. 20, (7). pp. ML'tII , , .. , - . KIRKPATRICK. S.; GELLAT. C:D. Jr., and VECCHI. M.P.: 'OptimiratiUn by simulated anneahn~', S&ncs, 1983, 120, pp.
~~ ~~~
671-680 ZHUANG. F . . and GALIANA, P.D.: 'Unit commitmcnt by simulated annealing'. JEEE Tram Power S'.x, 1990, 5. ( I ) , pp. 311-318 MANTAWY. A.H.. ABDEL-MAGID. Y.L.. and SELIM, S.Z.: 'A simulated annealiny algorithm for unit commitment', JEEE Tram P ~ ~ ~ ~ , ~ ~ S ~ ~ I L 1998.i3. TI), pp. 197-204 MANTAWY, A.H., ABDEL-MAGID, Y.L., and SELIM, S.Z.: 'Unit commitment bv tabu search? JEE Pmr Germ Trunni Dinrib., 1998, 145. (IC pp. 5 W INGBER. L.: 'Simulated medine: Dractice versus theory'. hfoih. Compul. Mwfel.. 1993, 18, (11). pf 29-57 BATTITI, R.. and TECCHIOLLI, G.: 'The reactive tabu search, URSA J. Cnmoul.. 1994. 6. 121. DO. 126140 , _ _ , . 1
DESAI. RI, a id PATIL. R.: ' S A L 0 Combining simulated annealing and local oplimimtion for efhcient global optimization'. In Proceed- ings of the Yth Florida AI research Symposium (FLAIRS-'96). Key West. FL. 1996. pp. 233-237 MARTIN, 0.. and OTTO. S.: 'Combining simulated annealing with local search heuristics', In LAPORTE, G. and OSMAN, I . (Eds.) 'Meuheuristic in Combinatonal Oplimiution, Annals of Opciation Research. Vol. (8. 1996 METROPOLIS, N.. ROSENBLUTH. A., ROSENBLUTH, M., TELLER, A., and TELLER, E.: 'Equations of state calculations by h t computing machines'. J. Clem. Phys., 1953, 21, pp.
GLOVER, F.: 'Tabu search - Part I'. ORSA J. Conipn., 1989. I, ( 3 , pp. 19@206 GLOVER, F.: 'Tabu search - Pan II', URSA J. Compul.. 1990.2, ( I ) , pp. 4-32 BAl, X., and SHAHIDEHPOUR. S.M.: 'Extended neighborhood mrch for constraincd unit commitment', Elecrr, POIVET E~wg,v Sy.sr., 1997, 19. (5). pp. 349-356 MANTAWY. A.H., ABDEL-MAGID, Y.L.. and SELIM. S.Z.: 'A new genetic-based tabu =arch algorithm for unit commitment prablrm', E/eclr. Power Sy.sr. Res., 1999. 49, pp. 71-7X
iox7-109~
71

16 FURUSHOTHAMA, G.K.: 'Hybrid heuristic algonlhmi For the uiiit BARD, J.F.: 'Shofl-teml scheduling of thumuil electric genera- commitinen1 problem'. PhD T h i s , Indian Institute of Science. tors using lagranpian rclaazition', Opo: Res.. 1988. %. (5). pp. Departmum of Elcctrical Engineering. Bmg;dorr, India. 2Wl 756766 FURUSHOTHAMA. G.K.. and JENKINS. L.: 'Simulated annialiiig 20 TURGEON. A,: -Optimal scheduling of thernral generating unit\'. with local search:- a hybrid algorithm For unit cummitmenl'. tEEE IEEE Trmrs. A U I O ~ Chiool. 1978. 23. (6). pp. 1WU-IU05 %rtm Pmwr 5 j . s r . . accepted for publication. ?I OUYANG, 2.. and SHAHIDEPOUR. S.M.: 'Short-tem unit GLOVER, F.: 'Anifickil intelligence. heuristic Frameworks and tabu commitiimit expert system'. Elmin Power SWI. Res.. 1W0. 20. (7). search'. Mmogcm Decir Econ. 1990. 11, pp. 365,175 pp. 1-13
19
17
18
72