transforming a planar maglev system to new application areas · •application of real time...
TRANSCRIPT

©2016 Philips Innovation Services | Confidential
Transforming a planar maglev system to new application areas
1
René BoerhofPhilips Innovation Services
DSPE October 2016

©2016 Philips Innovation Services | Confidential
Content
1. Introduction planar maglev system• Moving coils systems• Moving magnets systems
2. Modular planar maglev system competence study• Study objective & challenges• Study activities & results
3. Modular planar maglev system customer project• Project scope & challenges• Project results
4. Overview competence study vs customer project
5. Summary and conclusions
2

©2016 Philips Innovation Services | Confidential
Introduction planar maglev systemMoving coils system : ‘traditional’ configuration
3
X
YRz
Base frame / fixed world:Static Magnets
Carrier / Mover : Moving Coils
Dynamic cable interface:Power, Signals, Cooling
Position measurement Position measurement
Power and control electronics
‘Planar maglev’: 6 Degrees-of-Freedom (DoF) actively controlled magnetic levitation

©2016 Philips Innovation Services | Confidential
X
YRz
Base frame / fixed world:Static Coils
Carrier / Mover : Moving MagnetsPosition measurement Position measurement
Power and control electronics
Introduction planar maglev systemMoving magnets system: ‘inverted’ maglev
4
https://www.youtube.com/watch?v=CEK7bfBLTCk
©2016 Philips Innovation Services | Confidential
X
YRz
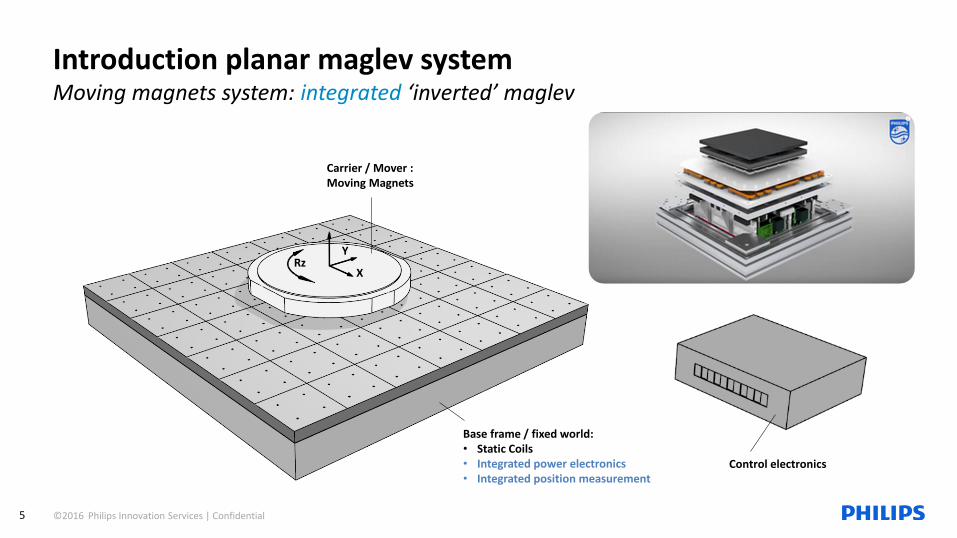
Base frame / fixed world:• Static Coils• Integrated power electronics• Integrated position measurement
Carrier / Mover : Moving Magnets
Control electronics
Introduction planar maglev systemMoving magnets system: integrated ‘inverted’ maglev
5

©2016 Philips Innovation Services | Confidential
Introduction planar maglev systemMoving magnets system: integrated ‘inverted’ maglev
6
©2016 Philips Innovation Services | Confidential
X
YRz
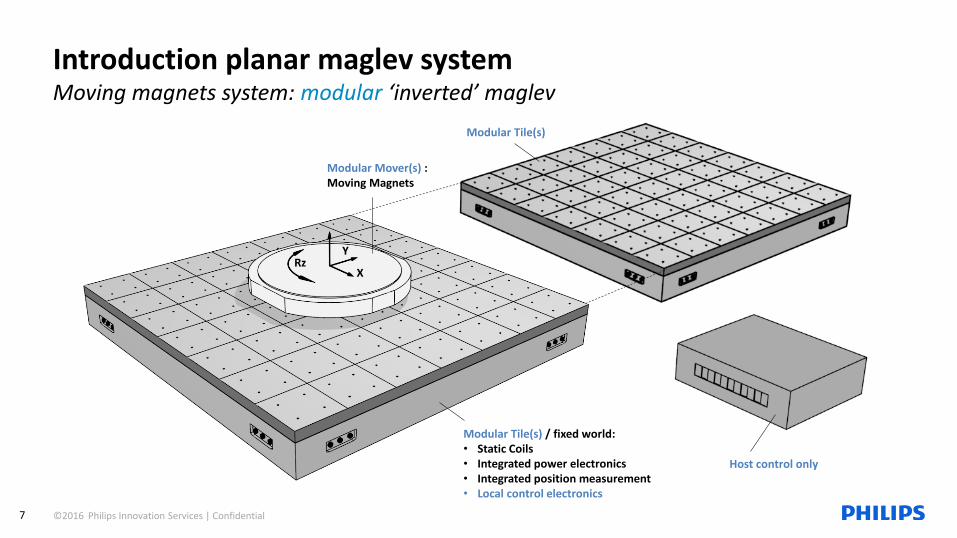
Modular Tile(s) / fixed world:• Static Coils• Integrated power electronics• Integrated position measurement• Local control electronics
Modular Mover(s) : Moving Magnets
Host control only
Modular Tile(s)
Introduction planar maglev systemMoving magnets system: modular ‘inverted’ maglev
7

©2016 Philips Innovation Services | Confidential
https://www.youtube.com/watch?v=CEK7bfBLTCk
8
Introduction planar maglev systemMoving magnets system: modular ‘inverted’ maglev
©2016 Philips Innovation Services | Confidential
Modular planar maglev system competence studyStudy objective & challenges
9
Objective: Address a different market segment than (ultra) high-end & high cost systems• Application areas such as flexible (product) transport and/or positioning in (ultra) clean or hostile environments
• Mid range accuracy and cost for an entirely contactless and wireless ‘inverted’ maglev system
• Modular ( & autonomous) building blocks for flexible lay-outs of any size (and orientation ; eg. for product transport)
• Multiple independent moving Mover(s) within the same platform
Technology / project challenges:• Application of real time wireless data communication within a precision stage control loop
• Application of wireless power transfer from fixed-to-moving world for virtual unlimited in-plane maglev travel
• Application of low cost power amplifiers and measurement system components for mid range maglev performance
• Integral system design with competences:
Electro-Mechanics (actuators), Electronics, Mechanics, Dynamics, Control,
Thermal & flow, Motion & Machine Control Software, Metrology, System Architecture

©2016 Philips Innovation Services | Confidential
Modular planar maglev system competence studyStudy activities & results - overview
10
Topics addressed in competence study:• System topology : horizontal up , - down, vertical, curvature
• Actuator concept design : topology, scaling factors (thermal), PWM amplifiers, simulations
• Measurement system concept : sensor types, on Mover or on Tile, reference stability (integrated thermal)
• Total system concept : modularity, sub functions/modules, position error budgeting, calibrations
• Data communication : between Tiles and system, wireless real time data
• Power system : wireless power transfer
• System control architecture : Tile crossing, servo error modeling, error budgeting
• System safety : human safety (electrical, ptc) , machine damage (vertical gravity)
• Cost of Goods : BoM estimate
Eventually, gathered insights have been used for a customer project resulting in a functional model (FUMO), which incorporated several of the aspects of a modular planar maglev system.

©2016 Philips Innovation Services | Confidential
Tile:• Coils• Power electronics• Position measurement
Mover Moving Magnets
Modular planar maglev system competence studyStudy activities & results - systems
11
Controllers and processing:
• Set-point Generator total System (Central)Inputs: 6DoF positions of Movers; Outputs: VAJ set points
• Position Measurement System per MoverInputs: x position signals; Outputs: 6DoF position
• Motion Controller per TileInputs: VAJ set points, 6DoF positions; Outputs: 6DoF force, communication to neighbors
• Commutation Controller per TileInputs: 6DoF force, 6Dof positions; Outputs: coil currents, communication to neighbors
• Current Controller per CoilInputs: coil current set point, coil current measured; Outputs: PWM set point to PWM amplifier
• Machine and Material Damage Controller (MMDC) total system• External Communication total system: eg. diagnostics, user interface, etc.

©2016 Philips Innovation Services | Confidential
Tile:• Coils• Power electronics• Position measurement
Mover Moving Magnets
Modular planar maglev system competence studyStudy activities & results – functions
12
Coils Coils
A A A A A A A A A A A A
CPU CPU CPU CPU
CPU
Tile processing unit• Communication (to central & other tiles)• Communication to Mover (real time)• Motion control (for 2 Movers max)• Commutation control
Measurement system (reference)• Positioning : X, Y, Rz active parts (Hall)• Commutation : X, Y, Rz active parts (Hall)
Actuator coils
Coil cooling body
Actuator power amplifiers
Coil-group processing unit• Wireless power support• Local meas. system data processing• Local wireless data (IR) processing• Coil current loop control
Structural frame
TILEMOVER
Measurement system• Positioning : Z, Rx, Ry active parts• Commutation : Z, Rx, Ry active parts
Actuator magnetsWireless power pickup coils
Mover processing unit• Meas. system data processing• Wireless power support• Communication to Tile (real time)
Structural frame

©2016 Philips Innovation Services | Confidential
Modular planar maglev system customer projectProject objective & challenges
13
Objective: Develop FUMO for modular planar maglev system with 180° in-plane (Rz) range• Application and customer confidential
• Mid range accuracy (μm) and cost for an entirely contactless and wireless ‘inverted’ maglev system
• Modular concept for flexible platform lay-outs of up to 10 modular Tiles and 4 independent Movers
• The FUMO shall contain only a single Tile and a single Mover for prove of sensing and actuation concept (incl. pos. accuracy)
• Beside (traditional) planar XY ranges , also large in-plane (Rz) range of +/- 180° required
Technology / project challenges:• Application of low cost power amplifiers and measurement system components for mid range maglev performance
• Topology design and commutation control for small footprint Mover with large Rz
• Integral system design with competences:
Electro-Mechanics (actuators), Electronics, Mechanics, Dynamics, Control,
Thermal & flow, Motion & Machine Control Software, Metrology, System Architecture
• Short lead time of 3 months from first concept to operational FUMO

©2016 Philips Innovation Services | Confidential
Modular planar maglev system customer projectProject results - 1/2
14
Project resulting design details:
• Position actuation design : • Mover with a footprint of approx. 250mm – functional stroke approx. 0.6m
• Actuation Tile with a total of 56 circular coils, all single sided water cooled (low performance)
• Each coil is controlled by an individual PWM amplifier (56 in total, single phase)
• EtherCAT interface from Philips SoftMotion control platform to all PWM amplifiers
• Position sensing design : • Position sensing Tile is separated from position actuation Tile to reduce risk(s) for FUMO
(interaction and flexibility; top & bottom Tile)
• Sensor Tile with a total of 144 Hall sensors (‘low-end’ components: approx. 1 euro ppc)
• EtherCAT interface from Philips SoftMotion control platform to all Hall sensors,
with standard Beckhoff IO-modules (‘low-end’ components)
coil calibration
Ha
ll senso
r arra
y

©2016 Philips Innovation Services | Confidential
Modular planar maglev system customer projectProject results - 2/2
15
Project resulting design details:
• System control : • Philips SoftMotion control platform used for:
• 6DOF position calculation based on Hall array (144 sensors in total)
• 6DOF actuator commutation for coil array (56 coils in total)
• 6DOF position control of (single) Mover
• Commutation control based on max allowed power dissipation per (single phase) coil
(iso minimization of dissipated power per 3-phase amplifier)
• EtherCAT interface from Philips SoftMotion control platform to amplifiers and sensor IO
• Observations and desired roadmap:• System positioning performance (approx. 10μm) dominated by sensor noise and sensor transformation time
• Smart (integrated) sensor and amplifier electronics boards desired for:
• Elimination of cabling to/from coils and sensors
• Reduction of sensor transformation by (more) localized processing
• Topology optimization desired for sensor array lay-out wrt 6DOF position sensitivity
coil calibration
Ha
ll senso
r arra
y
Tile:• Coils• Power electronics• Position measurement• Sensor transformation 6DOF
Mover Moving Magnets

©2016 Philips Innovation Services | Confidential
Overview competence study vs customer project - 1/2
16
©2016 Philips Innovation Services | Confidential
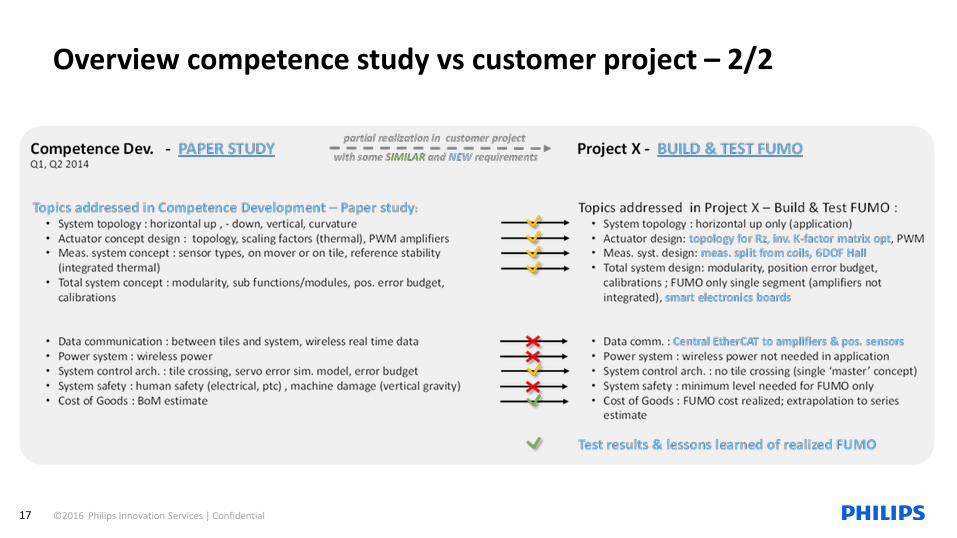
Overview competence study vs customer project – 2/2
17
©2016 Philips Innovation Services | Confidential
Summary and conclusions
Contactless & wireless moving magnet (maglev) systems can offer interesting opportunities for mid-range positioning accuracy applications when made flexible and affordable in configuration.
For one of such (customer) applications a FUMO has successfully been built, with:• 6 DOF actively controlled magnetic levitation • Contactless and wireless moving Mover• Virtual unlimited in-plane XY-travel and +/-180° Rz-rotation• A single actuation Tile (stator) containing 56 coils and PWM (chip) amplifiers• A single sensor Tile containing 144 Hall positioning sensors
FUMO was built successfully and challenges remain:• Availability of suitable off-the-shelf PWM (chip) amplifiers • Integration of low cost sensor arrays in smart sensor boards• Topology optimization of low cost sensor arrays for 6DOF sensing• Truly modular Tile design (with flexible control) still to be proven• ……
18
TileStatic Coils
Mover Moving Magnets
X
YRz

©2016 Philips Innovation Services | Confidential
How can we help toaccelerate your innovation?
19 Visit our website for more information, demo videos and customer cases: www.innovationservices.philips.com/high-precision