trained neuroanimator demo
DESCRIPTION
NeuroAnimator. Physical Model. Trained NeuroAnimator Demo. Which one is the physical model?. Example NeuroAnimators. Inputs: 12 Outputs: 6 Hidden Units: 20 Training set: 3K. Inputs: 8 Outputs: 6 Hidden Units: 40 Training set: 5K. Inputs: 17 Outputs: 13 Hidden Units: 50 - PowerPoint PPT PresentationTRANSCRIPT
Trained NeuroAnimator Demo
Which one is the physical model?Which one is the physical model?Which one is the physical model?Which one is the physical model?
Physical ModelPhysical ModelNeuroAnimatorNeuroAnimator
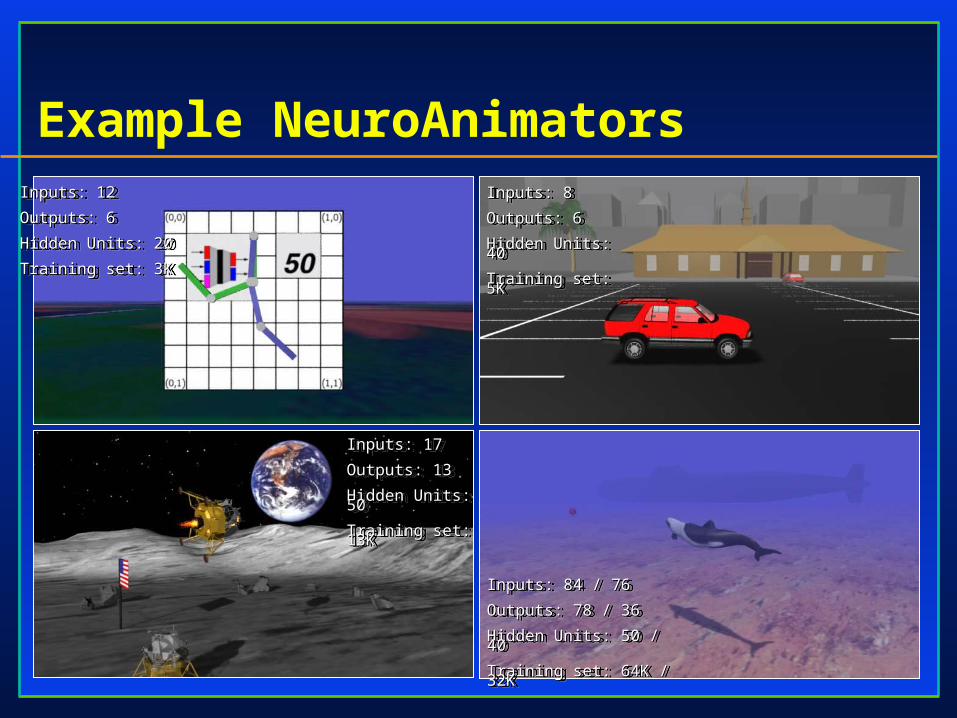
Example NeuroAnimatorsInputs: 12Inputs: 12
Outputs: 6Outputs: 6
Hidden Units: 20Hidden Units: 20
Training set: 3KTraining set: 3K
Inputs: 12Inputs: 12
Outputs: 6Outputs: 6
Hidden Units: 20Hidden Units: 20
Training set: 3KTraining set: 3K
Inputs: 8Inputs: 8
Outputs: 6Outputs: 6
Hidden Units: 40Hidden Units: 40
Training set: 5KTraining set: 5K
Inputs: 8Inputs: 8
Outputs: 6Outputs: 6
Hidden Units: 40Hidden Units: 40
Training set: 5KTraining set: 5K
Inputs: 17Inputs: 17
Outputs: 13Outputs: 13
Hidden Units: 50Hidden Units: 50
Training set: 13KTraining set: 13K
Inputs: 17Inputs: 17
Outputs: 13Outputs: 13
Hidden Units: 50Hidden Units: 50
Training set: 13KTraining set: 13K
Inputs: 84 / 76Inputs: 84 / 76
Outputs: 78 / 36 Outputs: 78 / 36
Hidden Units: 50 / 40Hidden Units: 50 / 40
Training set: 64K / 32KTraining set: 64K / 32K
Inputs: 84 / 76Inputs: 84 / 76
Outputs: 78 / 36 Outputs: 78 / 36
Hidden Units: 50 / 40Hidden Units: 50 / 40
Training set: 64K / 32KTraining set: 64K / 32K
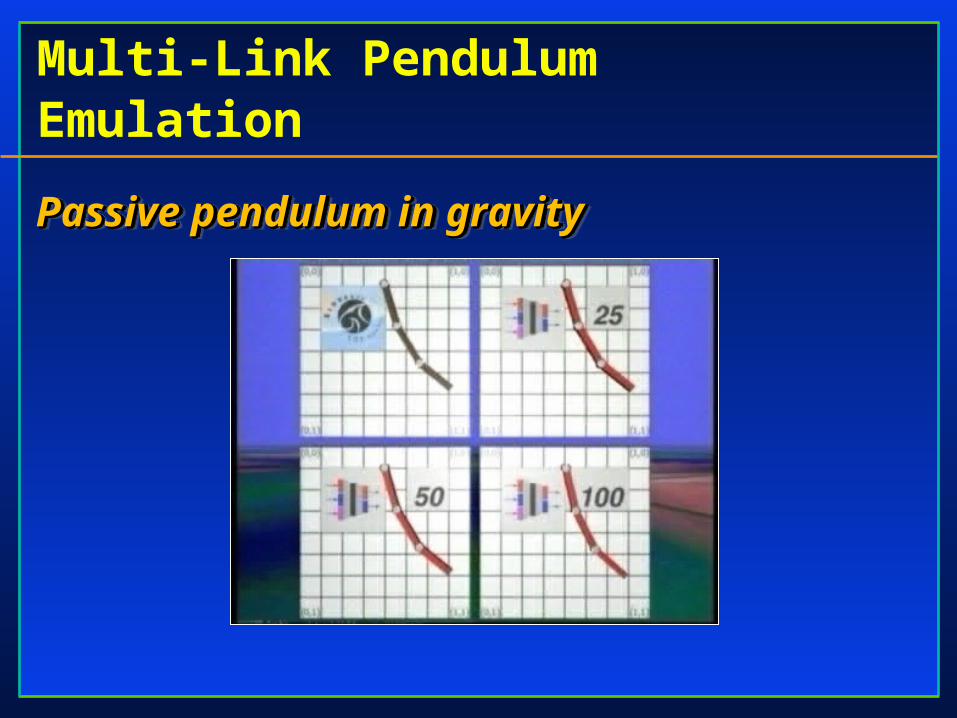
Multi-Link Pendulum Emulation
Passive pendulum in gravityPassive pendulum in gravityPassive pendulum in gravityPassive pendulum in gravity
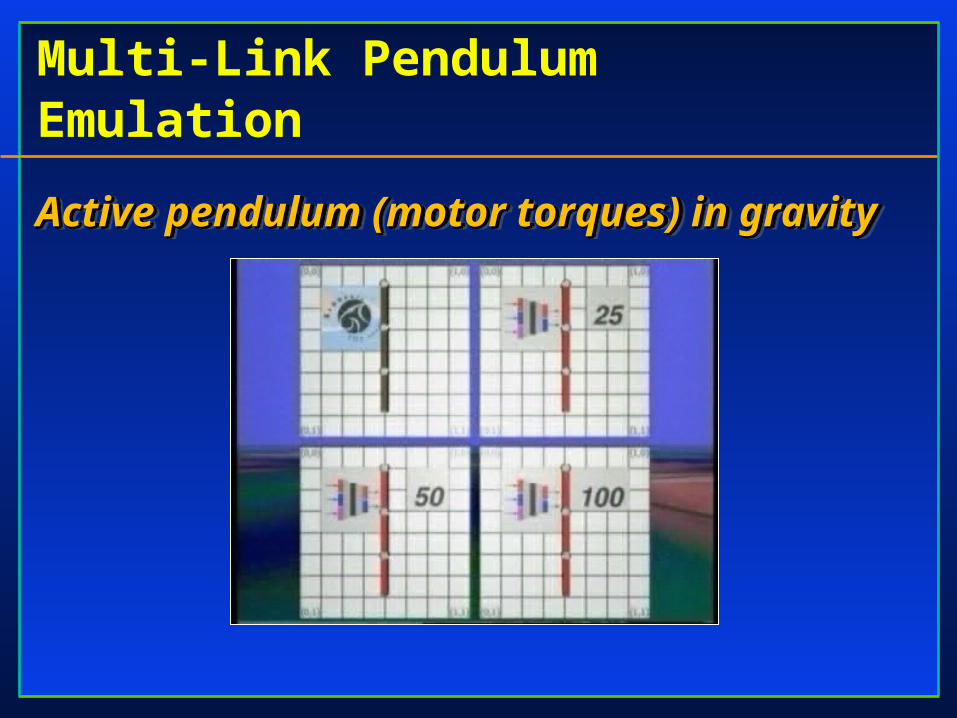
Multi-Link Pendulum Emulation
Active pendulum (motor torques) in gravityActive pendulum (motor torques) in gravityActive pendulum (motor torques) in gravityActive pendulum (motor torques) in gravity
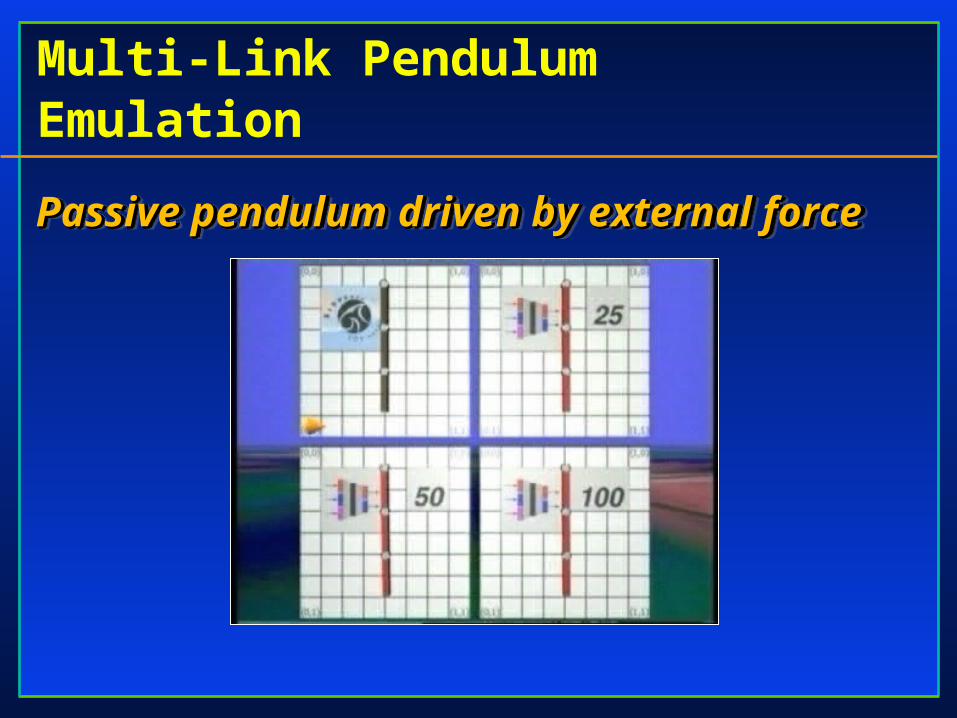
Multi-Link Pendulum Emulation
Passive pendulum driven by external forcePassive pendulum driven by external forcePassive pendulum driven by external forcePassive pendulum driven by external force
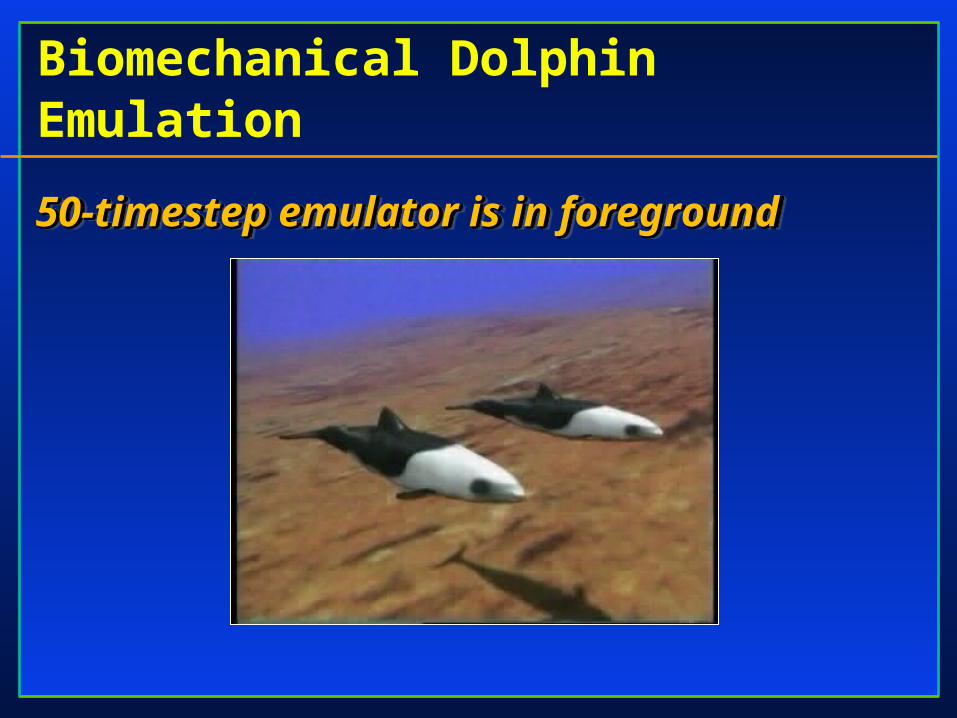
Biomechanical Dolphin Emulation
50-timestep emulator is in foreground50-timestep emulator is in foreground50-timestep emulator is in foreground50-timestep emulator is in foreground
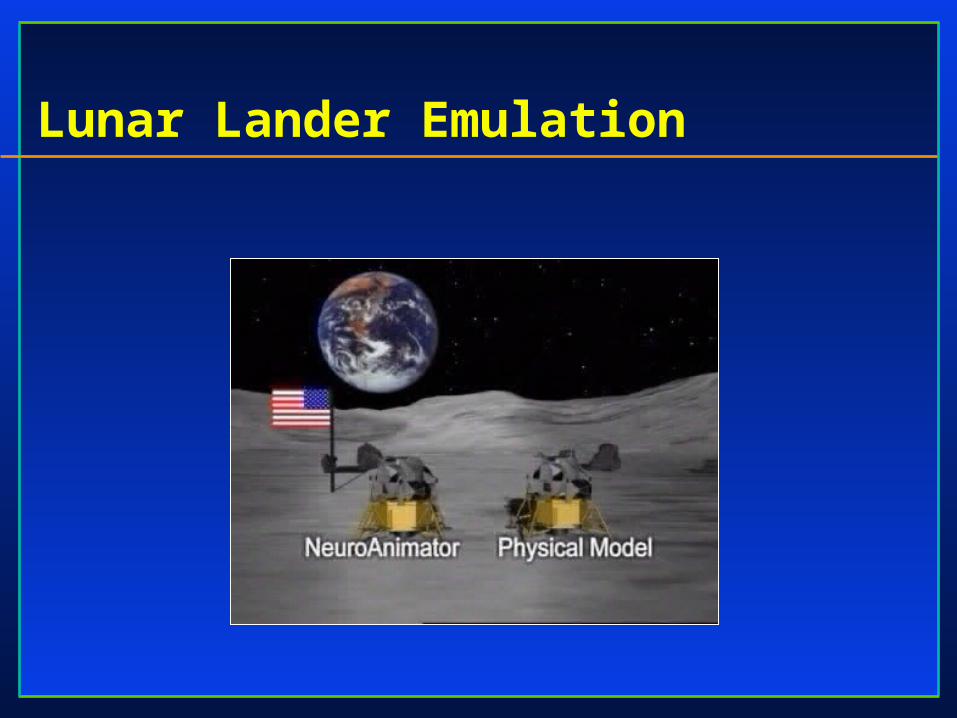
Lunar Lander Emulation
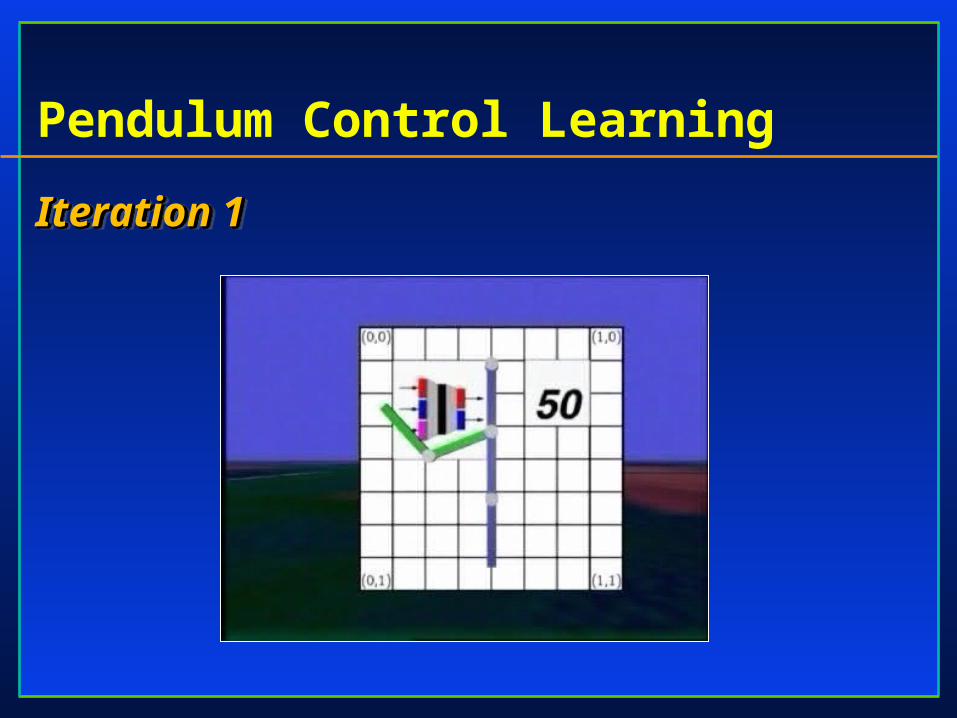
Pendulum Control Learning
Iteration 1Iteration 1Iteration 1Iteration 1
Pendulum Control Learning
Iteration 3Iteration 3Iteration 3Iteration 3
Pendulum Control Learning
Iteration 6Iteration 6Iteration 6Iteration 6
Pendulum Control Learning
Iteration 9Iteration 9Iteration 9Iteration 9
Pendulum Control Learning
Iteration 12 Iteration 12 Iteration 12 Iteration 12
Pendulum Control Learning
Iteration 15Iteration 15Iteration 15Iteration 15
Controlling the Physical Model
Physical pendulum model is purplePhysical pendulum model is purplePhysical pendulum model is purplePhysical pendulum model is purple
Dolphin Locomotion Learning
Iteration 1Iteration 1Iteration 1Iteration 1
Dolphin Locomotion Learning
Iteration 3Iteration 3Iteration 3Iteration 3
Dolphin Locomotion Learning
Iteration 5Iteration 5Iteration 5Iteration 5
Dolphin Locomotion Learning
Iteration 8Iteration 8Iteration 8Iteration 8
Dolphin Locomotion Learning
Iteration 11Iteration 11Iteration 11Iteration 11
Dolphin Locomotion Learning
Iteration 14Iteration 14Iteration 14Iteration 14
Controlling the Physical Model
Lander Control Learning
Iteration 1Iteration 1Iteration 1Iteration 1
Lander Control Learning
Iteration 3Iteration 3Iteration 3Iteration 3
Lander Control Learning
Iteration 6Iteration 6Iteration 6Iteration 6
Lander Control Learning
Iteration 9Iteration 9Iteration 9Iteration 9
Lander Control Learning
Iteration 12Iteration 12Iteration 12Iteration 12
Lander Control Learning
Iteration 15Iteration 15Iteration 15Iteration 15
Controlling The Physical Model