tomáš Štula
DESCRIPTION
VŠB - Technická univerzita Ostrava Fakulta elektrotechniky a informatiky Katedra měřicí a řídicí techniky. VYUŽITÍ EEG A BFB PRO NÁVRH A REALIZACI ROZHRANÍ ČLOVĚK-STROJ. Tomáš Štula. Wofex 2003. Obsah prezentace. EEG – elektroencefalografie Teoretický úvod BFB Návrh rozhraní člověk-stroj - PowerPoint PPT PresentationTRANSCRIPT
Tomáš Štula
VŠB - Technická univerzita OstravaFakulta elektrotechniky a informatiky
Katedra měřicí a řídicí techniky
VYUŽITÍ EEG A BFBPRO NÁVRH A REALIZACI ROZHRANÍ ČLOVĚK-STROJ
Wofex 2003
Obsah prezentace
1. EEG – elektroencefalografie
2. Teoretický úvod BFB
3. Návrh rozhraní člověk-stroj
4. Praktická realizace
5. Závěr
1. EEG - elektroencefalografie
Elektroencefalografie (EEG) je diagnostická metoda snímání a záznamu bioelektrických potenciálů, které vznikají při činnosti mozku. Mozek je nejdůležitější a nejkomplikovanější orgán lidského těla, obsahuje více než 100 miliard neuronů propojených navzájem stovkami až desetitisíci spoji.
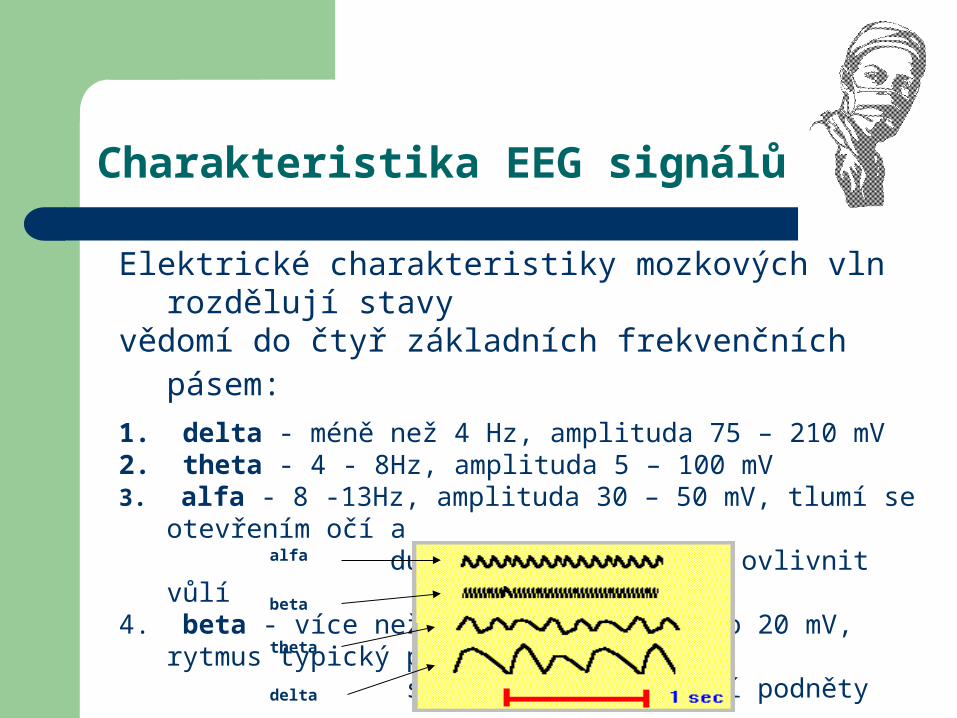
Charakteristika EEG signálů
Elektrické charakteristiky mozkových vln rozdělují stavyvědomí do čtyř základních frekvenčních pásem: 1. delta - méně než 4 Hz, amplituda 75 – 210 mV2. theta - 4 - 8Hz, amplituda 5 – 100 mV3. alfa - 8 -13Hz, amplituda 30 – 50 mV, tlumí se otevřením očí a duševní činností, lze ovlivnit vůlí4. beta - více než 13 Hz, amplituda do 20 mV, rytmus typický pro soustředění na vnější podněty
alfa
beta
theta
delta
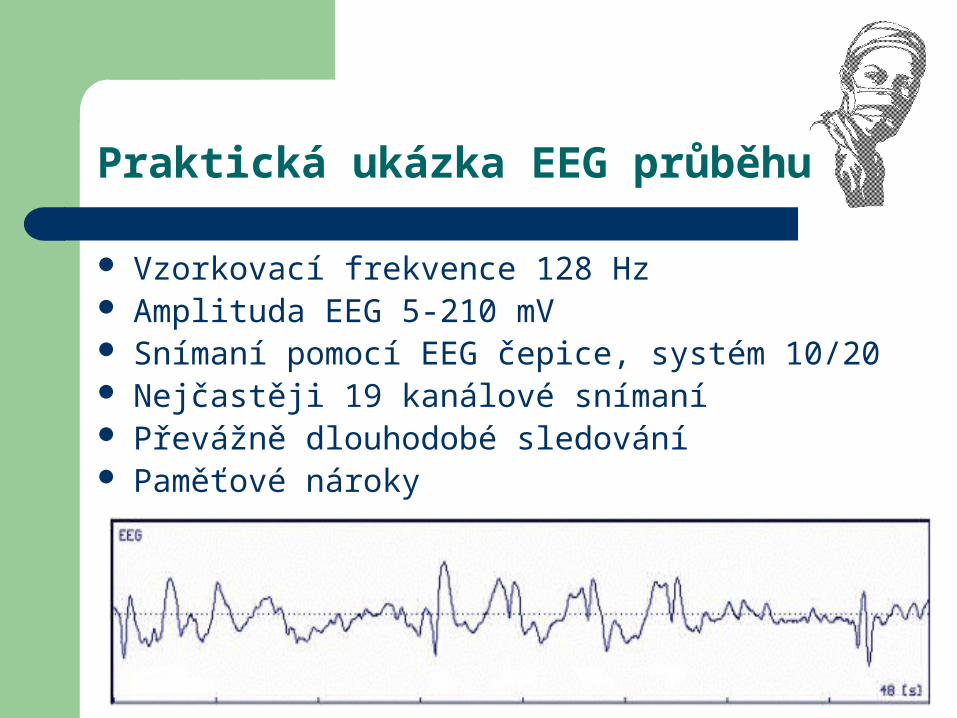
Praktická ukázka EEG průběhu
Vzorkovací frekvence 128 Hz Amplituda EEG 5-210 mV Snímaní pomocí EEG čepice, systém 10/20 Nejčastěji 19 kanálové snímaní Převážně dlouhodobé sledování Paměťové nároky
2. Teoretický úvod BFB
Bio-Feed-Back – biologická zpětná vazba Nebolestivou, neinvazivní metoda - částečně
terapie, částečně trénink a částečně sebeučení Umožňuje koordinaci mozkové aktivity na
základě vizuální informační zpětné vazby Mozková aktivita je reprezentována signály ve
frekvenční oblasti – EEG
Technika BFB
Metoda BFB stimuluje mozek ke generování mozkových potenciálů o dané frekvenci, charkteristické pro soustředění
Porucha pozornosti nadměrně theta aktivita Terapie udržení pozornosti co nejdéle Snaha být soustředěný a vnímavý Učení pomocí vizuální zpětné vazby
Zařízení BFB
Terapie je prováděna formou hry na PC Pacient se zapojuje myšlením do činnosti Hraje hry vizalizované na monitoru Aktivita mozku je snímána EEG zařízením Na základě úspěšnosti herní aktivity je mozek
zpětně informován formou odměny (hra se daří) nebo nebo inhibice (hra se zastaví)
Tím je prováděn cílený trénik mozkové aktivity
Funkce BFB
S podporou moderní výpočetní techniky a monitorovacích EEG přístrojů sledujeme a zaznamenáváme ve zlomcích okamžiku změny biologických procesů probíhajících pod povrchem těla a podávají o nich okamžitou zvukovou, vizuální nebo kombinovanou informaci na displeji přístroje. Tato informlace je vodítkem k vědomému ovládání těchto změn.
Druhy indikace soustředění
trénink s indikací svalového napětí (EMG-BFB) trénink s indikací mozkových vln (EEG-BFB) trénink s indikací teploty pokožky (TEMP-BFB) trénink s indikací el. odporu pokožky (GSR-BFB) trénink s indikací krevního tlaku a rychlosti pulsovních
vln (BP-BFB) trénink s indikací srdečního rytmu (EKT-BFB)
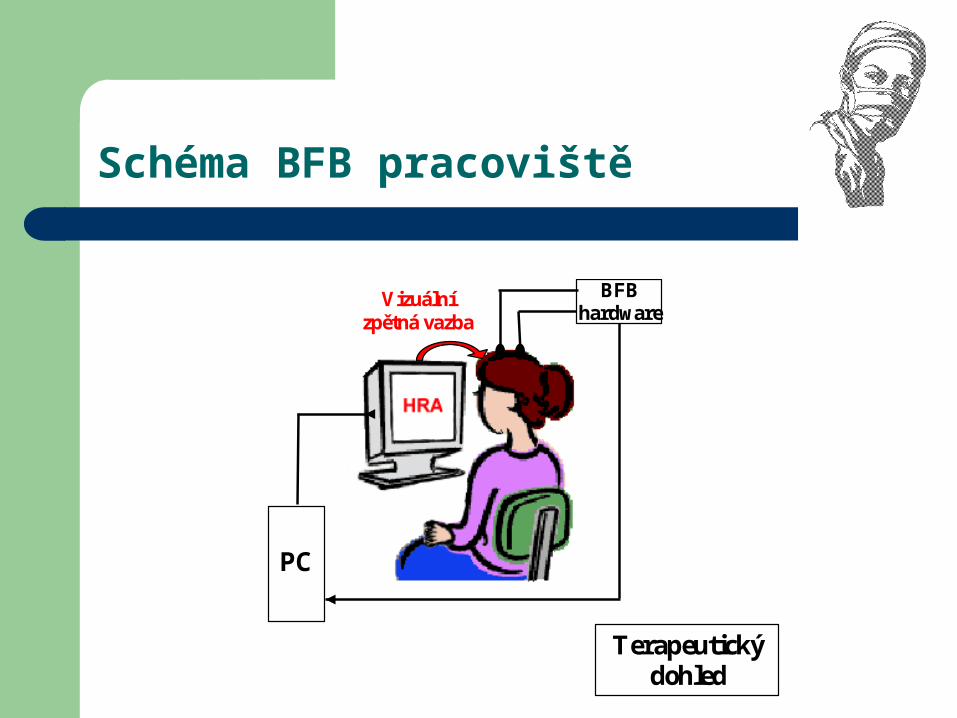
Schéma BFB pracoviště
BFB hardware
PC
Vizuální zpětná vazba
Terapeutický dohled
3. Návrh rozhranní člověk-stroj
1. Zařízení pro snímání elektrického odporu pokožky MindDrive (GSR-BFB)
2. PC + aplikační software pro vizualizaci a analýzu signálu
3. Bezdrátová komunikační linka pro přenos řídicích povelů k mobilnímu robotu
4. Mobilní robot
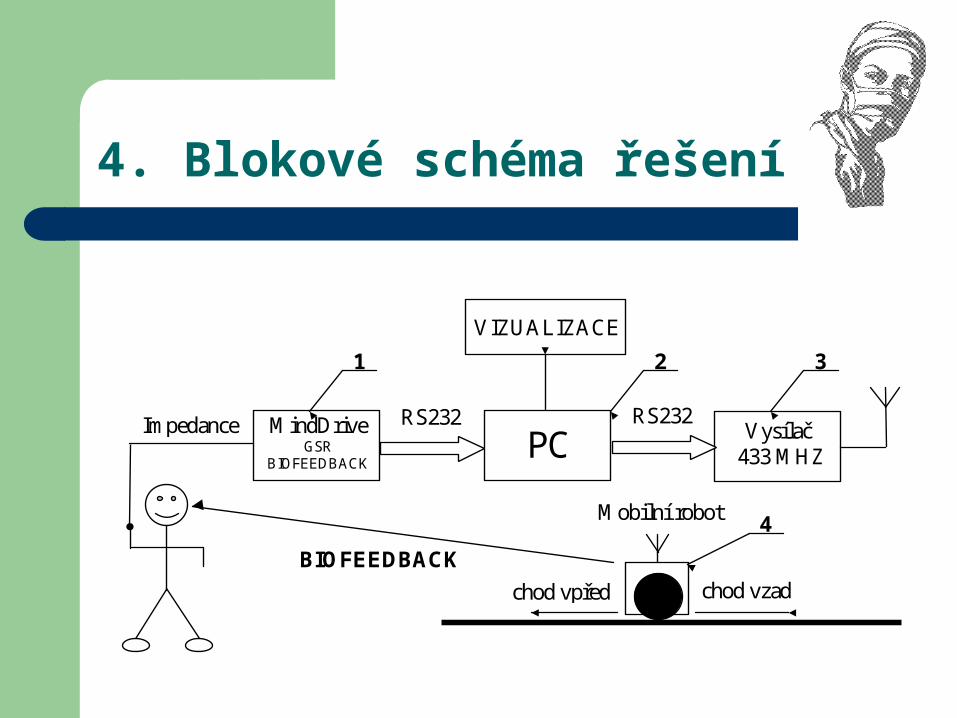
4. Blokové schéma řešení
3
MindDrive GSR
BIOFEEDBACK PC
RS232
VIZUALIZACE
Vysílač 433 MHZ
RS232
Mobilní robot
chod vpřed chod vzad
BIOFEEDBACK
1 2
4
Impedance
Popis funkce zařízení
Zařízení se skládá z PC na jehož rozhraní je připojen snímač BFB
Současně je na rozhraní PC připojen vysílač povelů mobilního robotu
Mobilní robot je napájen akumulátory a umožňuje volný pohyb po hrací ploše omezené mantinely
V případě připojení snímače BFB, začnou být snímány signály a po jejich zpracování v počítači je dán vysílačem povel mobilnímu robotu ke změně rychlosti pohybu po kružnici
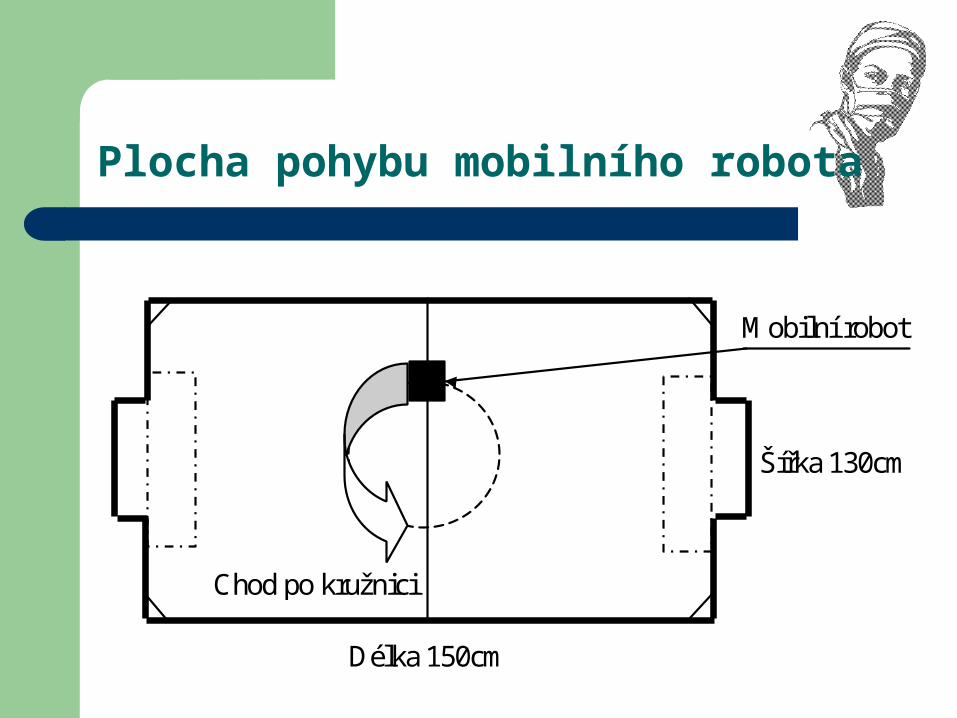
Plocha pohybu mobilního robota
Mobilní robot
Chod po kružnici
Délka 150cm
Šířka 130cm

Princip činnosti
Člověk nesoustředěný Robot se pohybuje konstantní rychlostí
Pomocí vizualní zpětné vazby se snažíme mobilní prostředek přinutit zvýšit rychlost pohybu
Volby mozkové aktivity (reprezentovanou změnou impedance kůže), kterou chceme trénovat např. BETA
Výskyt BETA rytmu zrychlení pohybu robota Zánik BETA rytmu zpomalení pohybu robota Takto lze koordinovat mozkovou aktivitu na základě
vizualní zpětné vazby tak, aby byl člověk soustředěny
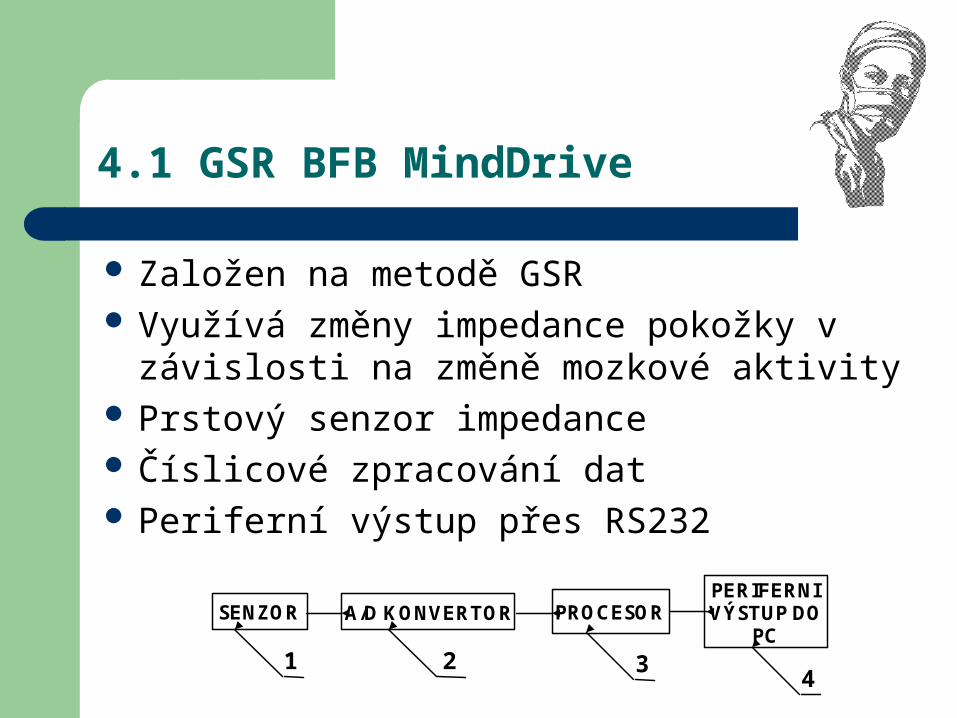
4.1 GSR BFB MindDrive
Založen na metodě GSR Využívá změny impedance pokožky v závislosti
na změně mozkové aktivity Prstový senzor impedance Číslicové zpracování dat Periferní výstup přes RS232
SENZOR A/D KONVERTOR
1
PROCESOR PERIFERNI VÝSTUP DO
PC 2 3
4

Ukázka zařízení

4.2 PC + aplikační software
PC Intel Pentium 4 – 1.7GHz, 512MB RAM, zvuková karta Sound Blaster Live, grafická karta ATI RADEON 7500
OS na platformě WIN32 - Windows XP Aplikační program vytvořen v Microsoft visual
C++ 6.0
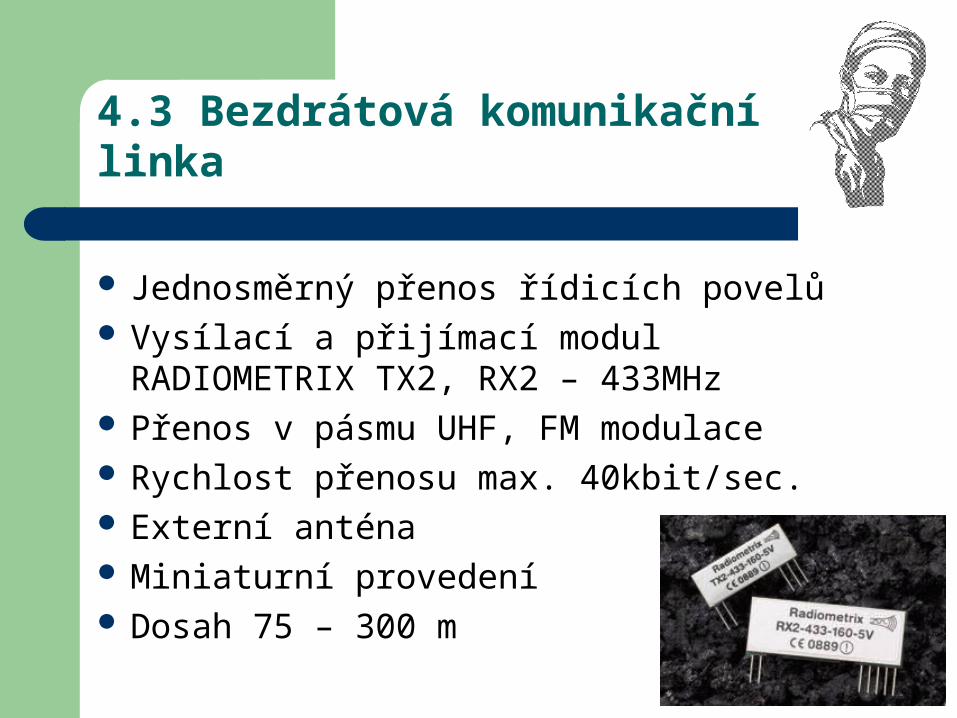
4.3 Bezdrátová komunikační linka
Jednosměrný přenos řídicích povelů Vysílací a přijímací modul RADIOMETRIX
TX2, RX2 – 433MHz Přenos v pásmu UHF, FM modulace Rychlost přenosu max. 40kbit/sec. Externí anténa Miniaturní provedení Dosah 75 – 300 m

4.4 Mobilní robot
75 x 75 x 75 mm, dvě kolečka, baterie 2 x DC mikromotor Faulhaber 4,05W Implementován snímač otáček – 512 pul./ot. 10.8 V NiMH 880mAh baterie – 30min. provozu 8-bit mikrocontroller PIC16F876-20MHz 2 x PID regulátor LM629-SMD PWM výkonový budič motorů L298 Firmware pro komunikaci a reg.otáček
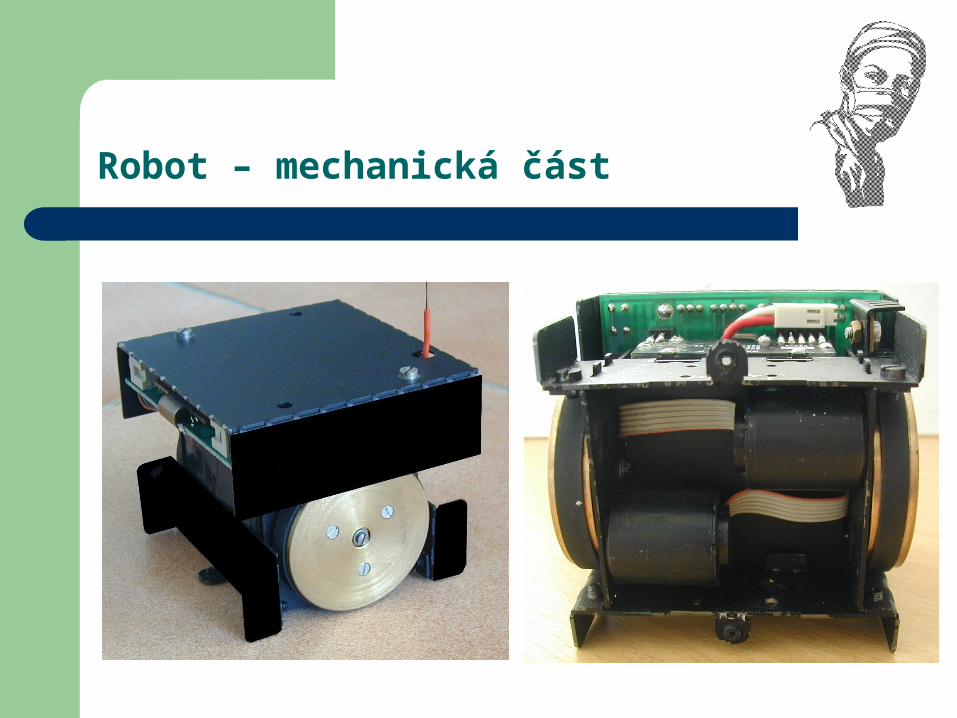
Robot – mechanická část
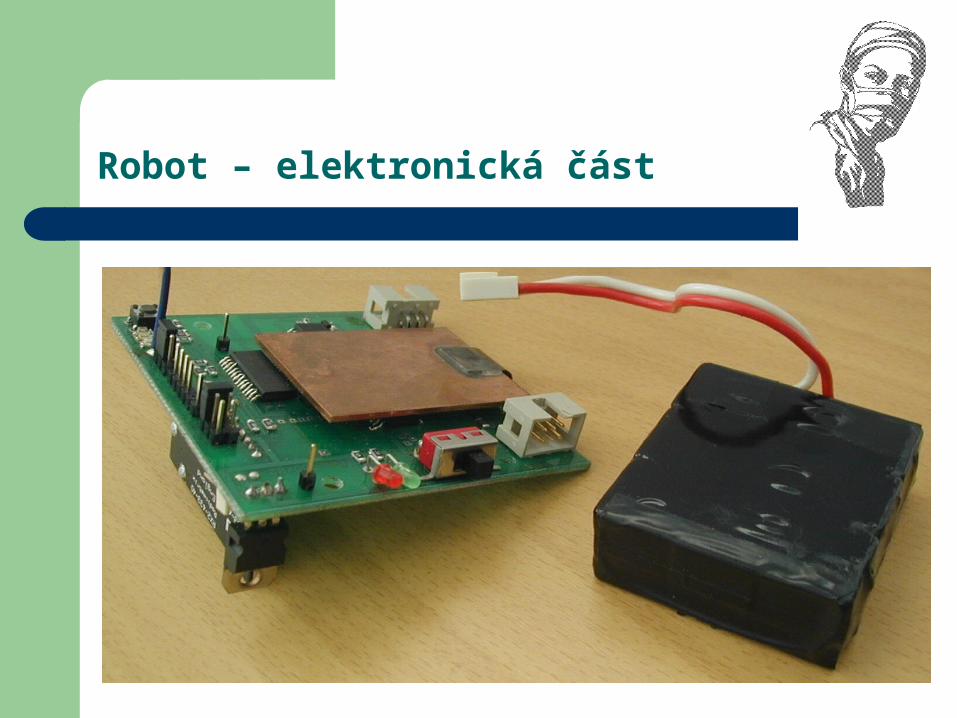
Robot – elektronická část
5. Závěr
Demonstrace základní principů ovládání robota technikou BFB
Řídicí PC + bezdrátová komunikační linka Úplnou pohybová volnost po ploše ohraničené
mantinely Programové vybavení pro ovládání pohybů robotu Vytvořen firmware robota Zahrnuto do přednášek a cvičení předmětů LDP a LTP Kooperace zařízení BFB - PC – ROBOT Vylepšení – archivace snímaných signálů +
automatizovaná analýza