tf of automatic control system
DESCRIPTION
Transfer function of countrol systemTRANSCRIPT
2.8 TF of automatic control system

Transfer function of the prototype element of linear system
( )
( )
C sG s K
R s
1.Proportioning element
Transfer function
K
R CBlock diagram
A linear system can be regarded as the composing of several prototype elements, which are:
)()( tkrtc Differential equation
Examples:amplifier, gear train, tachometer…
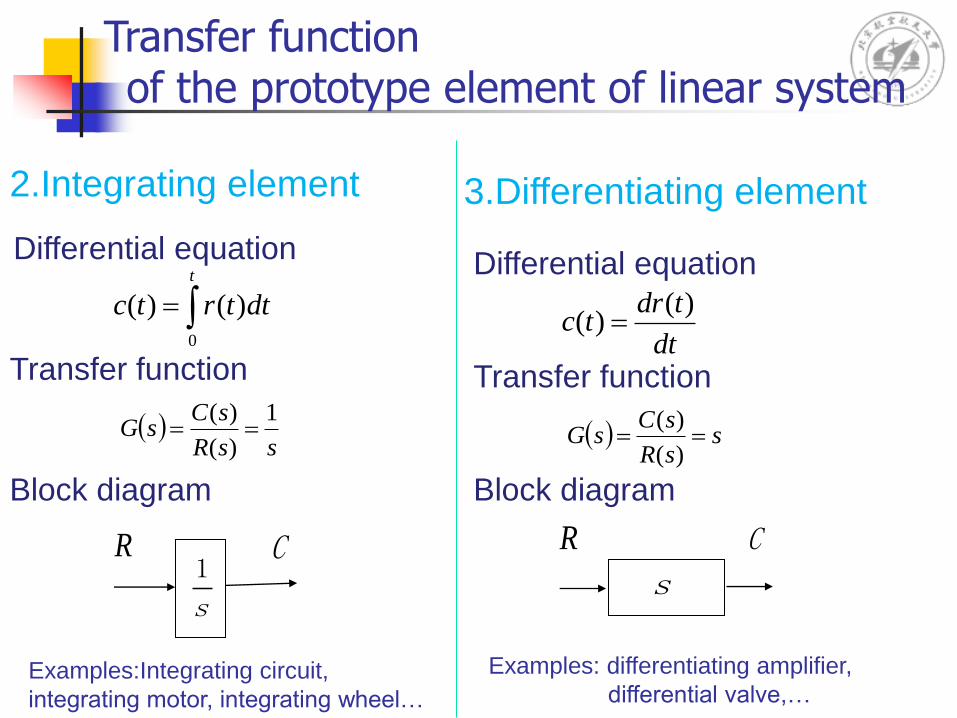
2.Integrating element
Transfer function
Block diagram
ssR
sCsG
1
)(
)(
1
s
R C
Transfer function of the prototype element of linear system
t
dttrtc0
)()(
Differential equation
Examples:Integrating circuit,
integrating motor, integrating wheel…
3.Differentiating element
Differential equation
Transfer function
Block diagram
dt
tdrtc
)()(
ssR
sCsG
)(
)(
s
R C
Examples: differentiating amplifier,
differential valve,…

4.Inertial element
Transfer function
Block diagram
1
1
)(
)(
TssR
sCsG
1
1Ts
R C
Transfer function of the prototype element of linear system
)()()(
trtcdt
tdcT
Differential equation
Examples: inertia wheel,
inertial load (such as temperature system)…
5. Oscillating element
Differential equation
Transfer function
Block diagram
2
2 22n n
s s
R C
Examples: oscillator, oscillating table,
oscillating circuit…
)()()(
2)( 22
2
2
trtcdt
tdc
dt
tcdnnn
2
2 2
( )
( ) 2n n
C sG s
R s s s

6.Delay element
Transfer function
ske
R CBlock diagram
Differential equation
Examples:gap effect of gear mechanism,
threshold voltage of transistors…
)()( tkrtc
skesR
sCsG
)(
)()(
Transfer function of the prototype element of linear system
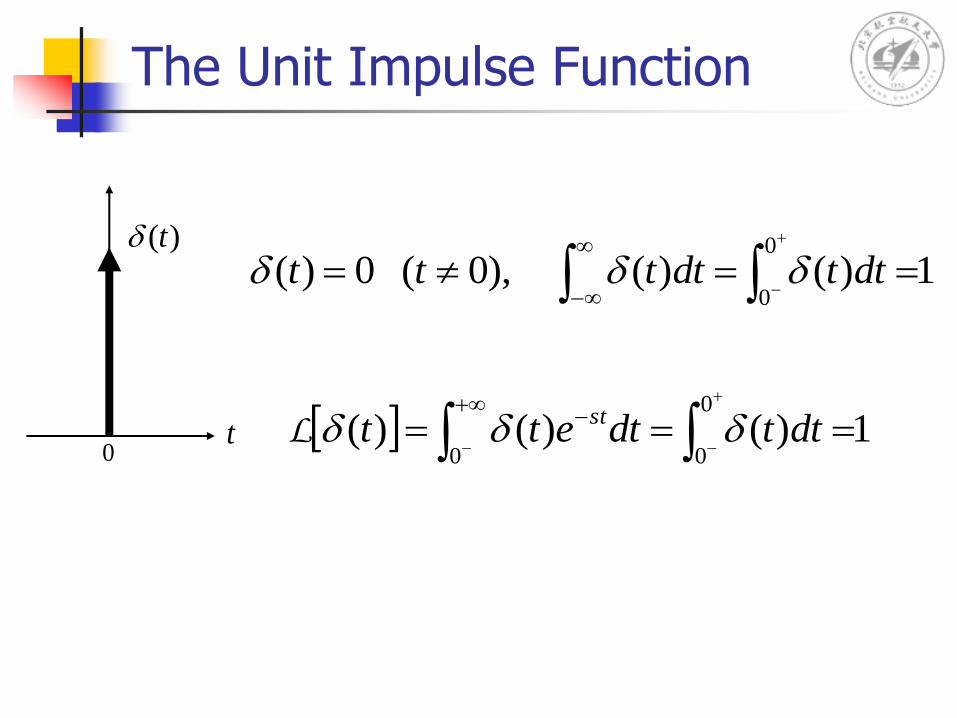
The Unit Impulse Function
1)()( ),0( 0)(0
0
dttdtttt
1)()()(0
0
0
dttdtett st L
)(t
t0

The Impulse Response
G(s) )(tu )(ty )()()( sUsGsY
)(t
)()}({)}({)( tgsGsYty -1-1 LL
)()( ttu 1)( sU )()( sGsY
Consider that a linear time-invariant system has
the input u(t) and output y(t). The system can be
characterized by its impulse response g(t), which is
defined as the output when the input is a unit impulse
function .
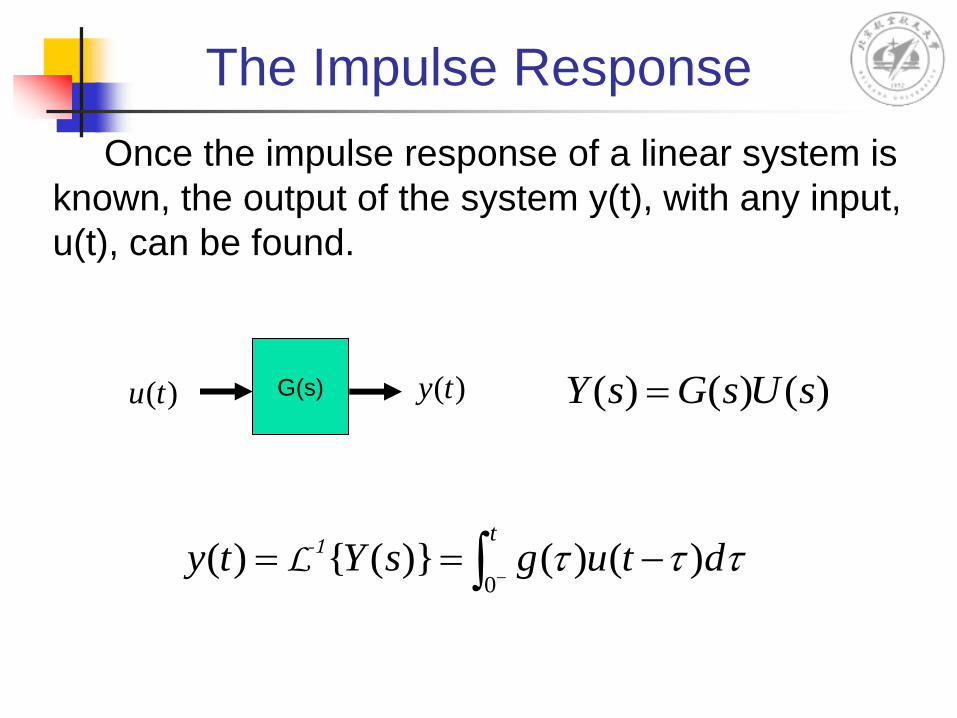
The Impulse Response
G(s) )(tu )(ty )()()( sUsGsY
Once the impulse response of a linear system is
known, the output of the system y(t), with any input,
u(t), can be found.
t
dtugsYty0
)()()}({)( 1-L

Multiple Inputs
Step 1: Set all but one input to zero.
Step 2: By rearranging the block diagram if necessary, determine the
transfer function from the single nonzero input to the output.
Step 3:Repeat step 2 for all inputs.
Step 4: Find all outputs.
Step 5: Add all outputs together to obtain the overall output to all
inputs.
We use the method of superposition in modeling a multi-input system
Superposition: For linear system, the overall response of the
system under multi-inputs is the summation of the responses due to
the individual inputs.

sG1
sH
sG2
NR
B
CE
Typical form of closed-loop system:
1. Open-loop transfer function
sHsGsG 21is called open-loop transfer function
We can obtain 1 2B s E s G s G s H s
Transfer Functions of
Automatic Control System
NOTE:Open-loop transfer function is not equal to the transfer function
of open-loop system.

2. Transfer function with input r(t)
1 2
1 21R
C s G s G ss
R s G s G s H s
Let 0tn
The transfer function is
sG1
sH
sG2
R C
b sG1
sH
sG2
NR
B
CE
a
1 2
1 2
( )/ ( )
( )1R
C s R s
G s G sC s s R s R s
G s G s H s
Transfer Functions of
Automatic Control System

3. Transfer function with input n(t)
Let 0r t
The transfer function is
sHsGsG
sG
sN
sCsn
21
2
1
sN
sHsGsG
sGsNssC n
21
2
1
sG1
sH
sG2
NR
B
CE
a sG2
sG1 sH
N C
c
Transfer Functions of
Automatic Control System
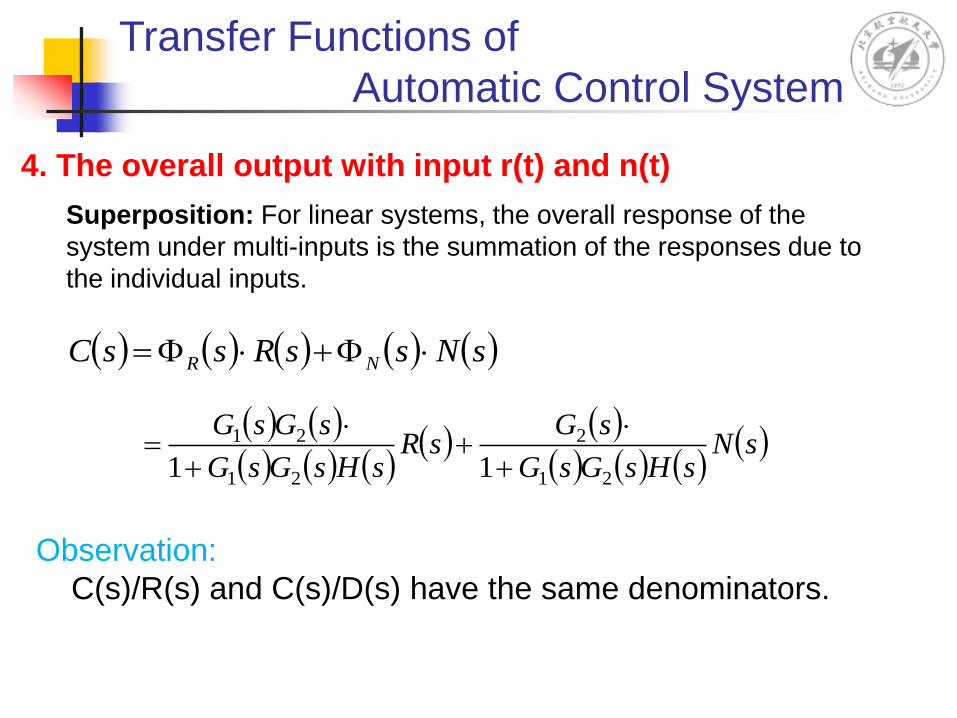
4. The overall output with input r(t) and n(t)
sNssRssC NR
sN
sHsGsG
sGsR
sHsGsG
sGsG
21
2
21
21
11
Transfer Functions of
Automatic Control System
Superposition: For linear systems, the overall response of the
system under multi-inputs is the summation of the responses due to
the individual inputs.
Observation:
C(s)/R(s) and C(s)/D(s) have the same denominators.

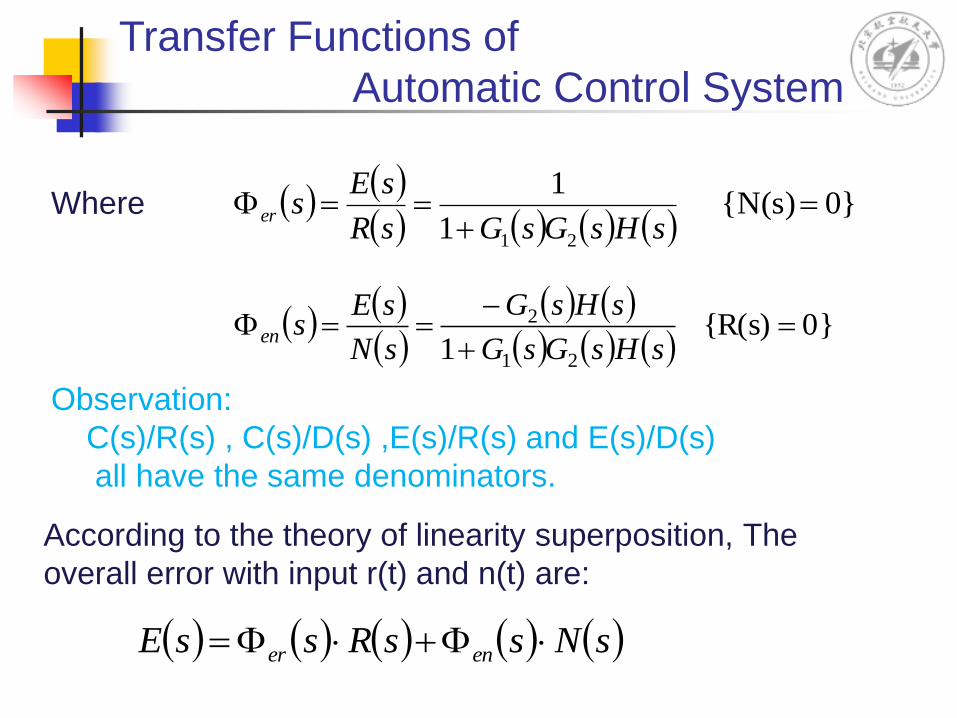
5. The transfer function of error of closed-loop system
0}{N(s) 1
1
21
sHsGsGsR
sEser
0}{R(s) 1 21
2
sHsGsG
sHsG
sN
sEsen
Where
Transfer Functions of
Automatic Control System
sG1
sH
sG2
NR
B
CE
a
sNssRssE ener
According to the theory of linearity superposition, The
overall error with input r(t) and n(t) are:
0}{N(s) 1
1
21
sHsGsGsR
sEser
0}{R(s) 1 21
2
sHsGsG
sHsG
sN
sEsen
Where
Transfer Functions of
Automatic Control System
Observation:
C(s)/R(s) , C(s)/D(s) ,E(s)/R(s) and E(s)/D(s)
all have the same denominators.

Example:
Find C(s)/R(s) , C(s)/N1(s) , C(s)/N2(s), C(s)/N3(s) and
E(s)/R(s) , E(s)/N1(s) , E(s)/N2(s), E(s)/N3(s) .
The error definition: E(s)=R(s)-C(s)
C(s)1NR
)(2 sN
_1G
2G
3G
)(3 sN
_ _
_

Example:
C(s)1NR
)(2 sN
_1G
2G
3G
)(3 sN
_ _
_
1 2 3( ) ( ) ( ) 0n t n t n t ( ) / ( )C s R s
1 1 2 3 2 2 3 , P G G G P G G
1 2 2 1 2 3L , LG G G G
1 2 2 1 2 31 ( ) 1L L G G G G
1 2 1
1 1 2 2 2 3 1 2 3
2 1 2 3
( )
( ) 1
C s P P G G G G G
R s G G G G
1.Suppose Find

Example:
C(s)1NR
)(2 sN
_1G
2G
3G
)(3 sN
_ _
_
2 3( ) ( ) ( ) 0r t n t n t 1( ) / ( )C s N s
2 3 1 2 3
1 2 1 2 3
( ) ( )
( ) ( ) 1
G G G G GC s C s
N s R s G G G G
2.Suppose Find
Easy to find

Example:
C(s)1NR
)(2 sN
_1G
2G
3G
)(3 sN
_ _
_
1 3( ) ( ) ( ) 0r t n t n t 2( ) / ( )C s N s
1 3 P G
1 2 2 1 2 3L , LG G G G
1 2 2 1 2 31 ( ) 1L L G G G G
1 21 G
3 2 31 1
2 2 1 2 3
( )
( ) 1
G G GPC s
N s G G G G
3.Suppose Find
Example:
C(s)1NR
)(2 sN
_1G
2G
3G
)(3 sN
_ _
_
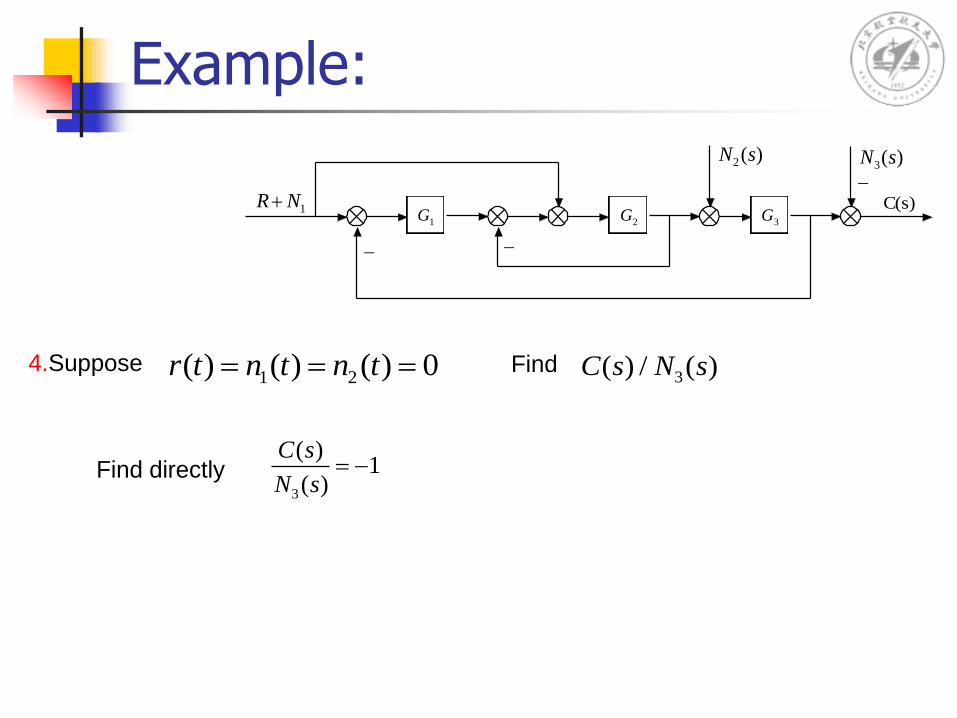
1 2( ) ( ) ( ) 0r t n t n t 3( ) / ( )C s N s
3
( )1
( )
C s
N s
4.Suppose Find
Find directly

Example:
C(s)1NR
)(2 sN
_1G
2G
3G
)(3 sN
_ _
_
1 2 3( ) ( ) ( ) 0n t n t n t ( ) / ( )E s R s5.Suppose Find
Known the error definition: E(s)=R(s)-C(s) and
2 3 1 2 3
2 1 2 3
2 2 3
2 1 2 3
( ) ( ) ( ) ( )1
( ) ( ) ( )
11
1
1
E s R s C s C s
R s R s R s
G G G G G
G G G G
G G G
G G G G
2 3 1 2 3
2 1 2 3
( )
( ) 1
G G G G GC s
R s G G G G

Example:
C(s)1NR
)(2 sN
_1G
2G
3G
)(3 sN
_ _
_
2 3( ) ( ) ( ) 0r t n t n t 1( ) / ( )E s N s6.Suppose Find
Known the error definition: E(s)=R(s)-C(s) and
1 1 1
2 3 1 2 3
2 1 2 3
( ) ( ) ( ) ( )
( ) ( ) ( )
1
E s R s C s C s
N s N s N s
G G G G G
G G G G
2 3 1 2 3
1 2 1 2 3
( )
( ) 1
G G G G GC s
N s G G G G

Example:
C(s)1NR
)(2 sN
_1G
2G
3G
)(3 sN
_ _
_
1 3( ) ( ) ( ) 0r t n t n t 2( ) / ( )E s N s7.Suppose Find
Known the error definition: E(s)=R(s)-C(s) and
2 2 2
3 2 3
2 1 2 3
( ) ( ) ( ) ( )
( ) ( ) ( )
1
E s R s C s C s
N s N s N s
G G G
G G G G
3 2 3
2 2 1 2 3
( )
( ) 1
G G GC s
N s G G G G
Example:
C(s)1NR
)(2 sN
_1G
2G
3G
)(3 sN
_ _
_
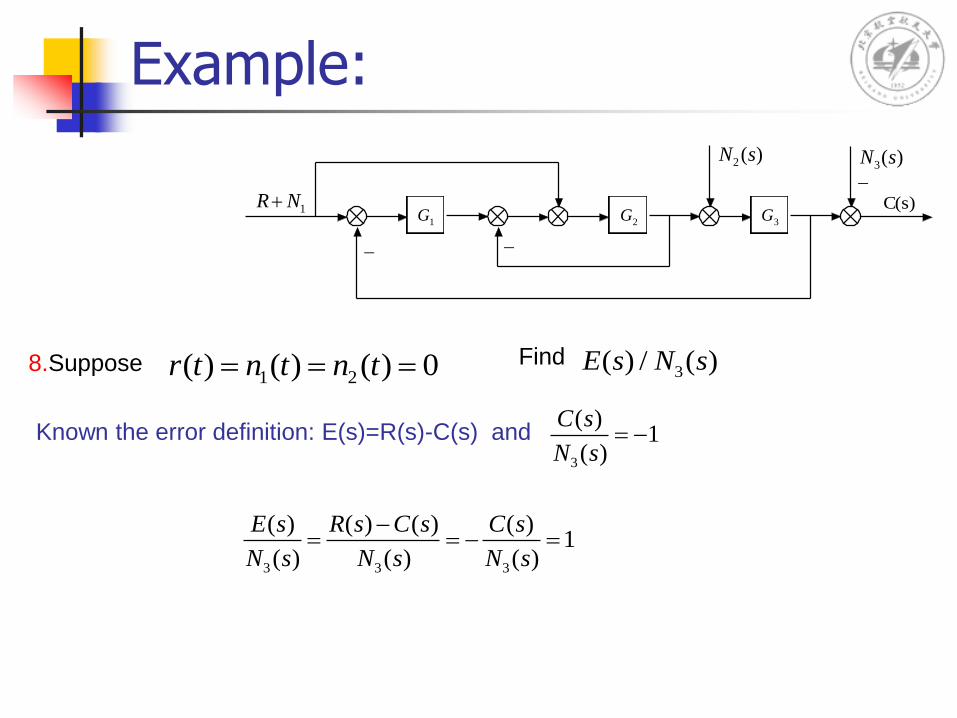
1 2( ) ( ) ( ) 0r t n t n t 3( ) / ( )E s N s8.Suppose Find
Known the error definition: E(s)=R(s)-C(s) and
3 3 3
( ) ( ) ( ) ( )1
( ) ( ) ( )
E s R s C s C s
N s N s N s
3
( )1
( )
C s
N s