tập 110, số 10, 2013
TRANSCRIPT
HOGNGHE
I
AND TECHNOLOGY
lltt
TU NHIEN I KY THUAI
EE TEEHNOTOEY
Tạp chí Khoa học và Công nghệ
CHUYÊN SAN KHOA HỌC TỰ NHIÊN – KỸ THUẬT
Mục lục Trang
Đào Thị Thu, Lê Thu Trang, Trần Văn Định - Hướng tiếp cận sử dụng mạng nơron nhân tạo kết hợp xây dựng số
hạng leo đồi giải quyết lớp bài toán tối ưu 3
Phạm Thị Hường, Nguyễn Thành Trung - Ứng dụng mạng nơ-ron thích nghi mờ ANFIS dự báo chỉ số chứng
khoán VNindex 9
Hoàng Đức Quỳnh, Nguyễn Doãn Phước - Xây dựng mô hình phi tuyến cho hệ điều khiển mức - nhiệt độ và phân
tích hệ thống 15
Nguyễn Thị Việt Hương, Đào Phương Nam, Nguyễn Doãn Phước - Mô hình hóa và mô phỏng có sử dụng bộ quan
sát trạng thái trong hệ cần cẩu treo 27
Hoàng Thị Thương, Vũ Thị Oanh - Sự kết hợp giữa thiết bị logic khả trình và giao diện người – máy (HMI) trong
việc điều khiển và giám sát hệ thống máy chiết bia 37
Mai Trung Thái, Nguyễn Thị Mai Hương - Điều khiển tối ưu cho một hệ có tham số phân bố sử dụng phương pháp
Gradient 45
Hà Thanh Tùng, Phạm Thị Hồng Anh - Một phương pháp nâng cao độ tin cậy lưới điện phân phối thành phố Thái
Nguyên sử dụng các thiết bị tự động hóa DAS (Distribution Automatinon System) 53
Phạm Thị Ngọc Dung, Hà Thanh Tùng - Kiểm toán năng lượng và sử dụng năng lượng hiệu quả trong tòa nhà cao
tầng công ty TNHH Khoa học & Quản lý Việt Nam (SMC) 59
Phạm Việt Bình, Nguyễn Văn Huân, Vũ Xuân Nam, Lê Anh Tú - Một phương pháp phân tích và dự báo sản lượng
chè tỉnh Thái Nguyên 65
Trần Viết Khanh, Lê Minh Hải, Nguyễn Lê Duy - Ứng dụng hệ thông tin địa lý xây dựng bản đồ phân bố không
gian online 71
Hà Anh Tuấn, Trương Thành Nam, Hoàng Văn Hùng, VươngVân Huyền, Ma Thị Trang - Nghiên cứu xây dựng cơ sở
dữ liệu phân tầng địa hình huyện Định Hóa - tỉnh Thái Nguyên từ hệ thống dữ liệu độ cao toàn thế giới ASTER GDEM 79
Phạm Ngọc Phương, Nguyễn Văn Tam - Xây dựng hệ thống giám sát môi trường tại các trung tâm tích hợp dữ liệu 89
- Một cách tiếp cận xây dựng thí nghiệm trong thực tại ảo 95
Ngô Mạnh Tưởng, Đàm Thanh Phương, Nguyễn Tuấn Linh - Một số ứng dụng của đại số tuyến tính trong khai
phá dữ liệu 101
Bùi Văn Chung, Đỗ Thị Mai, Lê Thị Thu Huyền - Điều khiển mô hình nội thích nghi mô hình nhận dạng online 109
Vũ Khánh Quý, Nguyễn Chiến Trinh, Hồ Khánh Lâm - Chuyển giao trong hệ thống mạng WLAN\LTE dựa trên
giao thức IEEE 802.21 115
Vũ Xuân Nam, Nguyễn Văn Huân, Trương Văn Tú - Ứng dụng phép phân tích hồi quy đa biến trong kiểm định
yếu tố quyết định hành vi chia sẻ tri thức của người lao động trong doanh nghiệp Việt Nam 123
Hà Thị Thanh, Tô Hữu Nguyên, Nguyễn Hồng Tân, Nguyễn Văn Việt, Nguyễn Lan Oanh - Ứng dụng giải thuật
di truyền vào sinh testcase hiệu quả 131
Vũ Thị Thu Huyền - Một cách tiếp cận trong nhập phiếu điểm tự động 137
Nguyễn Anh Tuấn - Ứng dụng thuật toán MSA cho mã LDPC 143
Journal of Science and Technology
110(10)
Năm 2013
Tạp chí Khoa học và Công nghệ
NATURAL SCIENCE – TECHNOLOGY
Content Page
Dao Thi Thu, Le Thu Trang, Tran Van Dinh - On the approach of using combined artificial neural networks for
determining hill - climbing terms to solve optimization problems 3
Pham Thi Huong, Nguyen Thanh Trung - Applying adaptive neuro fuzzy inference system to forecast Vn-
index 9
Hoang Duc Quynh, Nguyen Doan Phuoc - Nonlinear modelling of level-temperature control system and analysis
of system 15
Nguyen Thi Viet Huong, Dao Phuong Nam, Nguyen Doan Phuoc - Modelling and using state observer in
simulation for gantry crane 27
Hoang Thi Thuong, Vu Thi Oanh - The coordination of the programmable logic controller and human machine
interface (HMI) in control and monitor beer filling systems 37
Mai Trung Thai, Nguyen Thi Mai Huong - Optimal control of a class of distributed parameter systems using Gradient
methods 45
Ha Thanh Tung, Pham Thi Hong Anh - A method improve the reliability Thai nguyen’s power distribution
system use of automation equipment (distribution system automatinon) 53
Pham Thi Ngoc Dung, Ha Thanh Tung - Energy audits and energy and efficience in buildings & Science Co., Ltd
Vietnam Administration (SMC) 59
Phạm Viet Binh, Nguyen Van Huan, Vu Xuan Nam, Le Anh Tu - A solution to forecast and analyse tea-
production in Thainguyen province 70
Tran Viet Khanh, Le Minh Hai, Nguyen Le Duy - Application of geographical information system in mapping
online spatial distribution 71
Ha Anh Tuan, Truong Thanh Nam, Hoang Van Hung, Vuong Van Huyen, Ma Thi Trang - A study of building
stratified topographic database, 1:50.000 scales topographic map in Dinh Hoa – Thai Nguyen province from the
ASTER GDEM global height database system 79
Pham Ngoc Phuong, Nguyen Van Tam - Designing an environment - monitoring system at data centers 89
Quan Thi Vui, Nguyen Thi Diep Hong - An approach to the construction laboratory virtual reality 95
Ngo Manh Tuong, Dam Thanh Phuong, Nguyen Tuan Linh - Some applications of linear algebra in data mining 101
Bui Van Chung, Do Thi Mai, Le Thi Thu Huyen - Internal model control for adapting with identification model
online 109
Vu Khanh Quy, Nguyen Chien Trinh, Ho Khanh Lam - Handover in LTE/WLAN internetwork based on IEEE
802.21 protocol 115
Vu Xuan Nam, Nguyen Van Huan, Truong Van Tu - Determinants of knowledge sharing behavior among
employees in Vietnamese enterprises 123
Ha Thi Thanh, To Huu Nguyen, Nguyen Hong Tan, Nguyen Van Viet, Nguyen Lan Oanh - The application of
genetic algorithm to effectively generate test case 131
Vu Thi Thu Huyen - An approach to the entering scores automatically 137
Nguyen Anh Tuan - Application MSA algorithm for LDPC cod 143
Journal of Science and Technology
110(10)
2013
Đào Thị Thu và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 3 - 7
3
HƢỚNG TIẾP CẬN SỬ DỤNG MẠNG NƠRON NHÂN TẠO KẾT HỢP
XÂY DỰNG SỐ HẠNG LEO ĐỒI GIẢI QUYẾT LỚP BÀI TOÁN TỐI ƢU
Đào Thị Thu
*, Lê Thu Trang, Trần Văn Định
Trường ĐH Công nghệ thông tin và Truyền thông – ĐH Thái Nguyên
TÓM TẮT Mạng nơron nhân tạo đã đƣợc nghiên cứu để giải quyết rất nhiều lớp bài toán trong đó có lớp bài
toán tối ƣu, bài toán xếp hậu là một bài toán tối ƣu điển hình, đây là một bài toán dễ dàng mô tả
nhƣng lại không dễ để giải nó một cách hiệu quả. Kích cỡ nghiệm của không gian nghiệm có độ
phức tạp hàm mũ NN
sẽ tạo một sự bùng nổ về tổ hợp, gây khó khăn trong quá trình giải quyết.
Trong bài báo này nhóm chúng tôi trình bày kết quả nghiên cứu của mình về việc ứng dụng mạng
nơron nhân tạo kết hợp xây dựng số hạng leo đồi để giải quyết bài toán xếp hậu.
Từ khóa: Mạng nơron, xếp hậu, tối ưu, leo đồi.
GIỚI THIỆU
Trong những năm gần đây ở nƣớc ta mạng
nơron nhân tạo đã đƣợc nghiên cứu sâu và
rộng hơn, với ƣu điểm của mạng nơron là khả
năng xử lý song song và chấp nhận lỗi nên nó
đƣợc ứng dụng trong rất nhiều lĩnh vực nhƣ:
bài toán phân lớp, bài toán xấp xỉ, bài toán
nhận dạng… đặc biệt là những ứng dụng của
mạng nơron để giải quyết lớp bài toán tối ƣu.
Rất nhiều bài toán tối ƣu thuộc lớp NPC là
bài toán có độ phức tạp lớn (hàm mũ, giai
thừa), vì vậy hiện nay ở nƣớc ta có nhiều
nghiên cứu về hƣớng tiếp cận giải quyết bài
toán thuộc lớp này, trong đó có hƣớng tiếp
cận sử dụng mạng nơron nhân tạo và thu đƣợc
những kết quả đáng kể.
Những đóng góp của chúng tôi trong bài báo
này bao gồm:
Giới thiệu mô hình mạng nơron nhân tạo
Hopfield.
Sử dụng mạng nơron hồi quy Hopfield giải
quyết bài toán tối ƣu, cụ thể là bài toán xếp
hậu.
Phần còn lại của bài báo đƣợc trình bày theo
cấu trúc nhƣ sau: Phần 2 trình bày về mô hình
mạng nơron Hopfield, phần 3 trình bày về
ứng dụng của mạng nơron Hopfield để giải
bài toán Xếp hậu. Phần 4 trình bày về kết quả
thực nghiệm. Kết luận và hƣớng nghiên cứu
tiếp theo đƣợc trình bày trong phần 6.
Tel: 0912342000
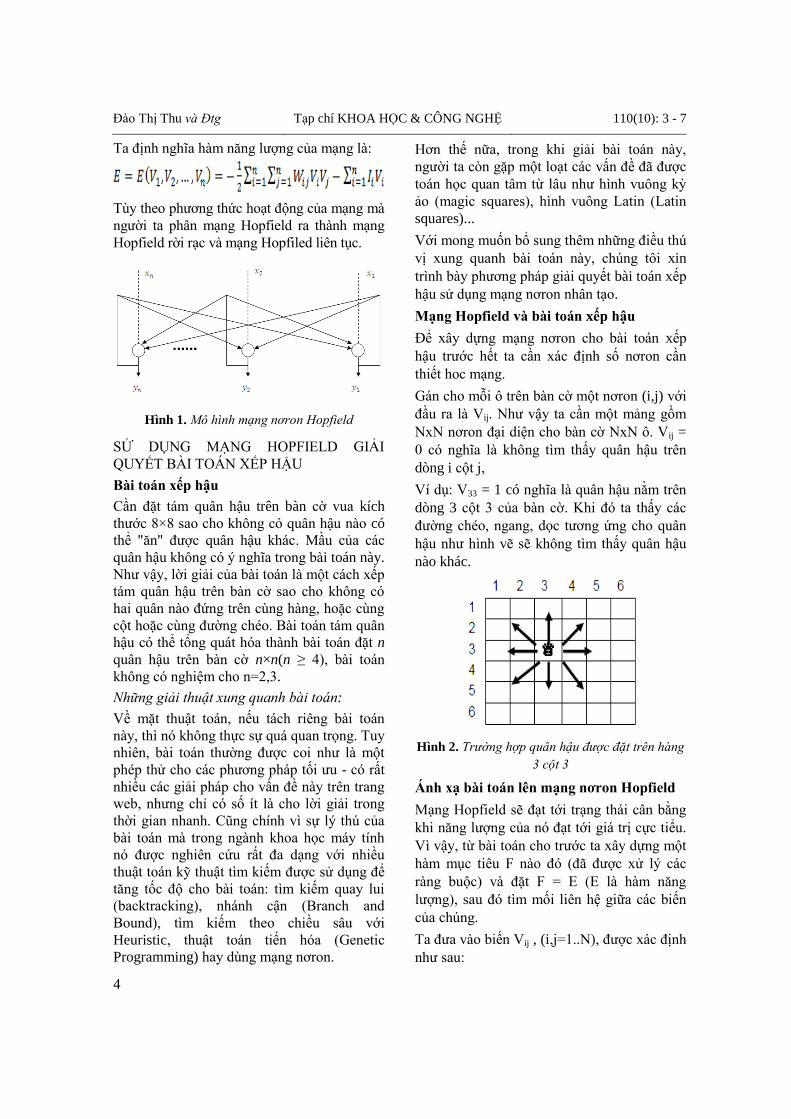
MÔ HÌNH MẠNG NƠRON HOPFIELD
Mạng hồi quy là mạng mà tín hiệu ra của một
nơ-ron có thể truyền ngƣợc lại làm tín hiệu
đầu vào cho các nơ-ron ở các lớp trƣớc, hoặc
các nơ-ron trong cùng một lớp.
Mạng Hopfield là mô hình mạng tiêu biểu
thuộc lớp mạng hồi quy. Trong công trình
nghiên cứu về mạng Hopfiled ngƣời ta đã tìm
ra đƣợc rất nhiều ứng dụng, đặc biệt là bộ nhớ
liên kết và trong các bài toán tối ƣu.
Mạng Hopfield đƣợc xây dựng dƣới dạng một
lớp, mỗi nơ-ron đƣợc truyền ngƣợc lại làm tín
hiệu đầu vào cho các nơ-ron khác nhƣng bản
thân các nơ-ron không tự liên kết với chính
nó. Khi đó mô hình mạng Hopfield đƣợc biểu
diễn nhƣ hình 1.
Kí hiệu Wij là liên kết giữa hai nơron i và j
(Wij = Wji), Vi là đầu ra của nơron i. Ta coi
véc tơ (V1, V2,…., Vn) là trạng thái của
mạng. Tại mỗi thời điểm t mỗi nơron i tổng
hợp các tín hiệu Vj từ các nơron khác và
ngƣỡng kích hoạt:
Tùy theo hàm kích hoạt fi mà nơron i cho đầu ra là:
Mạng đạt trạng thái cân bằng nếu:
Vi (t+1) = Vi (t)
Đào Thị Thu và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 3 - 7
4
Ta định nghĩa hàm năng lƣợng của mạng là:
Tùy theo phƣơng thức hoạt động của mạng mà
ngƣời ta phân mạng Hopfield ra thành mạng
Hopfield rời rạc và mạng Hopfiled liên tục.
Hình 1. Mô hình mạng nơron Hopfield
SỬ DỤNG MẠNG HOPFIELD GIẢI
QUYẾT BÀI TOÁN XẾP HẬU
Bài toán xếp hậu
Cần đặt tám quân hậu trên bàn cờ vua kích
thƣớc 8×8 sao cho không có quân hậu nào có
thể "ăn" đƣợc quân hậu khác. Mầu của các
quân hậu không có ý nghĩa trong bài toán này.
Nhƣ vậy, lời giải của bài toán là một cách xếp
tám quân hậu trên bàn cờ sao cho không có
hai quân nào đứng trên cùng hàng, hoặc cùng
cột hoặc cùng đƣờng chéo. Bài toán tám quân
hậu có thể tổng quát hóa thành bài toán đặt n
quân hậu trên bàn cờ n×n(n ≥ 4), bài toán
không có nghiệm cho n=2,3.
Những giải thuật xung quanh bài toán:
Về mặt thuật toán, nếu tách riêng bài toán
này, thì nó không thực sự quá quan trọng. Tuy
nhiên, bài toán thƣờng đƣợc coi nhƣ là một
phép thử cho các phƣơng pháp tối ƣu - có rất
nhiều các giải pháp cho vấn đề này trên trang
web, nhƣng chỉ có số ít là cho lời giải trong
thời gian nhanh. Cũng chính vì sự lý thú của
bài toán mà trong ngành khoa học máy tính
nó đƣợc nghiên cứu rất đa dạng với nhiều
thuật toán kỹ thuật tìm kiếm đƣợc sử dụng để
tăng tốc độ cho bài toán: tìm kiếm quay lui
(backtracking), nhánh cận (Branch and
Bound), tìm kiếm theo chiều sâu với
Heuristic, thuật toán tiến hóa (Genetic
Programming) hay dùng mạng nơron.
Hơn thế nữa, trong khi giải bài toán này,
ngƣời ta còn gặp một loạt các vấn đề đã đƣợc
toán học quan tâm từ lâu nhƣ hình vuông kỳ
ảo (magic squares), hình vuông Latin (Latin
squares)...
Với mong muốn bổ sung thêm những điều thú
vị xung quanh bài toán này, chúng tôi xin
trình bày phƣơng pháp giải quyết bài toán xếp
hậu sử dụng mạng nơron nhân tạo.
Mạng Hopfield và bài toán xếp hậu
Để xây dựng mạng nơron cho bài toán xếp
hậu trƣớc hết ta cần xác định số nơron cần
thiết hoc mạng.
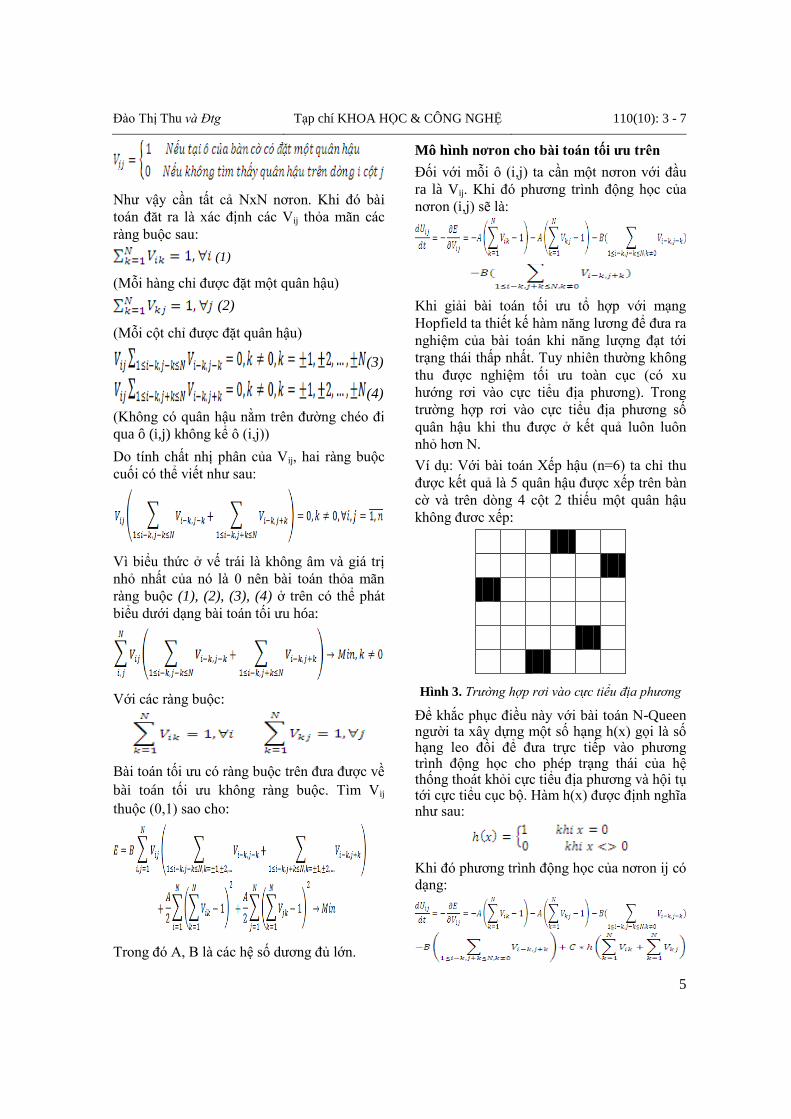
Gán cho mỗi ô trên bàn cờ một nơron (i,j) với
đầu ra là Vij. Nhƣ vậy ta cần một mảng gồm
NxN nơron đại diện cho bàn cờ NxN ô. Vij =
0 có nghĩa là không tìm thấy quân hậu trên
dòng i cột j,
Ví dụ: V33 = 1 có nghĩa là quân hậu nằm trên
dòng 3 cột 3 của bàn cờ. Khi đó ta thấy các
đƣờng chéo, ngang, dọc tƣơng ứng cho quân
hậu nhƣ hình vẽ sẽ không tìm thấy quân hậu
nào khác.
Hình 2. Trường hợp quân hậu được đặt trên hàng
3 cột 3
Ánh xạ bài toán lên mạng nơron Hopfield
Mạng Hopfield sẽ đạt tới trạng thái cân bằng
khi năng lƣợng của nó đạt tới giá trị cực tiểu.
Vì vậy, từ bài toán cho trƣớc ta xây dựng một
hàm mục tiêu F nào đó (đã đƣợc xử lý các
ràng buộc) và đặt F = E (E là hàm năng
lƣợng), sau đó tìm mối liên hệ giữa các biến
của chúng.
Ta đƣa vào biến Vij , (i,j=1..N), đƣợc xác định
nhƣ sau:
Đào Thị Thu và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 3 - 7
5
Nhƣ vậy cần tất cả NxN nơron. Khi đó bài
toán đăt ra là xác định các Vij thỏa mãn các
ràng buộc sau:
(1)
(Mỗi hàng chỉ đƣợc đặt một quân hậu)
(2)
(Mỗi cột chỉ đƣợc đặt quân hậu)
(3)
(4)
(Không có quân hậu nằm trên đƣờng chéo đi
qua ô (i,j) không kể ô (i,j))
Do tính chất nhị phân của Vij, hai ràng buộc
cuối có thể viết nhƣ sau:
Vì biểu thức ở vế trái là không âm và giá trị
nhỏ nhất của nó là 0 nên bài toán thỏa mãn
ràng buộc (1), (2), (3), (4) ở trên có thể phát
biểu dƣới dạng bài toán tối ƣu hóa:
Với các ràng buộc:
Bài toán tối ƣu có ràng buộc trên đƣa đƣợc về
bài toán tối ƣu không ràng buộc. Tìm Vij
thuộc (0,1) sao cho:
Trong đó A, B là các hệ số dƣơng đủ lớn.
Mô hình nơron cho bài toán tối ƣu trên
Đối với mỗi ô (i,j) ta cần một nơron với đầu
ra là Vij. Khi đó phƣơng trình động học của
nơron (i,j) sẽ là:
Khi giải bài toán tối ƣu tổ hợp với mạng
Hopfield ta thiết kế hàm năng lƣơng để đƣa ra
nghiệm của bài toán khi năng lƣợng đạt tới
trạng thái thấp nhất. Tuy nhiên thƣờng không
thu đƣợc nghiệm tối ƣu toàn cục (có xu
hƣớng rơi vào cực tiểu địa phƣơng). Trong
trƣờng hợp rơi vào cực tiểu địa phƣơng số
quân hậu khi thu đƣợc ở kết quả luôn luôn
nhỏ hơn N.
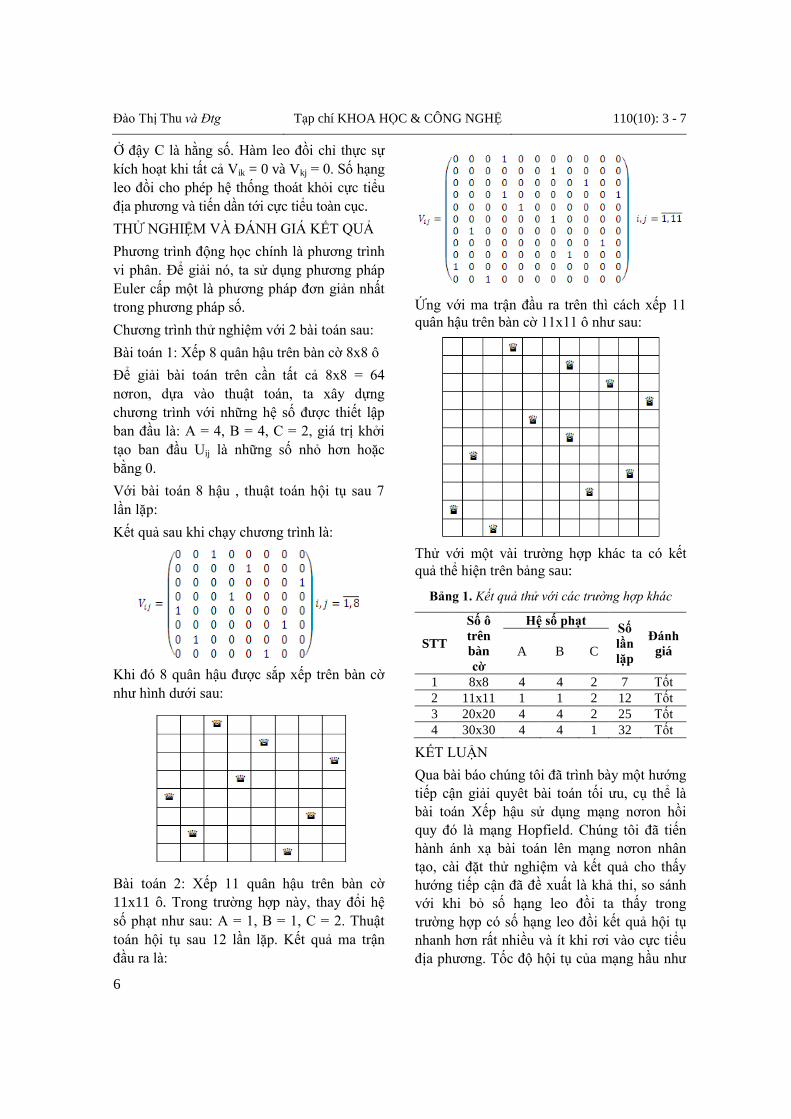
Ví dụ: Với bài toán Xếp hậu (n=6) ta chỉ thu
đƣợc kết quả là 5 quân hậu đƣợc xếp trên bàn
cờ và trên dòng 4 cột 2 thiếu một quân hậu
không đƣơc xếp:
Hình 3. Trường hợp rơi vào cực tiểu địa phương
Để khắc phục điều này với bài toán N-Queen ngƣời ta xây dựng một số hạng h(x) gọi là số hạng leo đồi để đƣa trực tiếp vào phƣơng trình động học cho phép trạng thái của hệ thống thoát khỏi cực tiểu địa phƣơng và hội tụ tới cực tiểu cục bộ. Hàm h(x) đƣợc định nghĩa nhƣ sau:
Khi đó phƣơng trình động học của nơron ij có
dạng:
Đào Thị Thu và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 3 - 7
6
Ở đậy C là hằng số. Hàm leo đồi chỉ thực sự
kích hoạt khi tất cả Vik = 0 và Vkj = 0. Số hạng
leo đồi cho phép hệ thống thoát khỏi cực tiểu
địa phƣơng và tiến dần tới cực tiểu toàn cục.
THỬ NGHIỆM VÀ ĐÁNH GIÁ KẾT QUẢ
Phƣơng trình động học chính là phƣơng trình
vi phân. Để giải nó, ta sử dụng phƣơng pháp
Euler cấp một là phƣơng pháp đơn giản nhất
trong phƣơng pháp số.
Chƣơng trình thử nghiệm với 2 bài toán sau:
Bài toán 1: Xếp 8 quân hậu trên bàn cờ 8x8 ô
Để giải bài toán trên cần tất cả 8x8 = 64
nơron, dựa vào thuật toán, ta xây dựng
chƣơng trình với những hệ số đƣợc thiết lập
ban đầu là: A = 4, B = 4, C = 2, giá trị khởi
tạo ban đầu Uij là những số nhỏ hơn hoặc
bằng 0.
Với bài toán 8 hậu , thuật toán hội tụ sau 7
lần lặp:
Kết quả sau khi chạy chƣơng trình là:
Khi đó 8 quân hậu đƣợc sắp xếp trên bàn cờ
nhƣ hình dƣới sau:
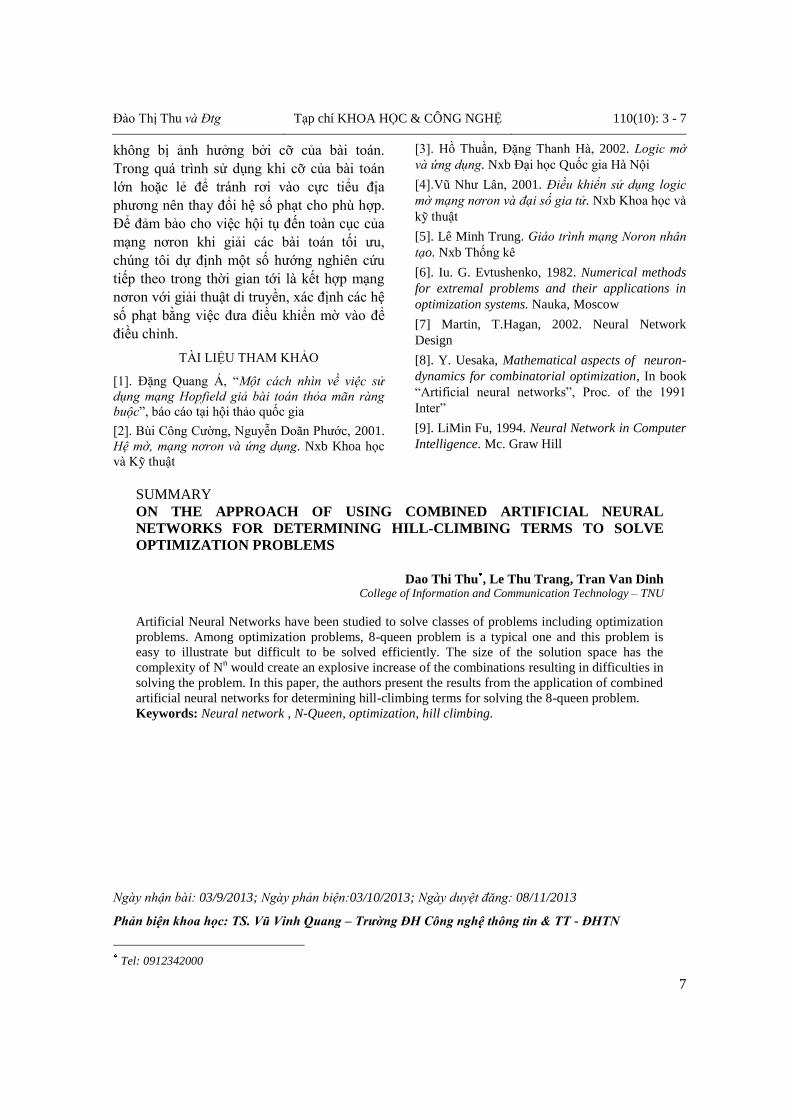
Bài toán 2: Xếp 11 quân hậu trên bàn cờ
11x11 ô. Trong trƣờng hợp này, thay đổi hệ
số phạt nhƣ sau: A = 1, B = 1, C = 2. Thuật
toán hội tụ sau 12 lần lặp. Kết quả ma trận
đầu ra là:
Ứng với ma trận đầu ra trên thì cách xếp 11
quân hậu trên bàn cờ 11x11 ô nhƣ sau:
Thử với một vài trƣờng hợp khác ta có kết
quả thể hiện trên bảng sau:
Bảng 1. Kết quả thử với các trường hợp khác
STT
Số ô
trên
bàn
cờ
Hệ số phạt Số
lần
lặp
Đánh
giá A B C
1 8x8 4 4 2 7 Tốt
2 11x11 1 1 2 12 Tốt
3 20x20 4 4 2 25 Tốt
4 30x30 4 4 1 32 Tốt
KẾT LUẬN
Qua bài báo chúng tôi đã trình bày một hƣớng
tiếp cận giải quyêt bài toán tối ƣu, cụ thể là
bài toán Xếp hậu sử dụng mạng nơron hồi
quy đó là mạng Hopfield. Chúng tôi đã tiến
hành ánh xạ bài toán lên mạng nơron nhân
tạo, cài đặt thử nghiệm và kết quả cho thấy
hƣớng tiếp cận đã đề xuất là khả thi, so sánh
với khi bỏ số hạng leo đồi ta thấy trong
trƣờng hợp có số hạng leo đồi kết quả hội tụ
nhanh hơn rất nhiều và ít khi rơi vào cực tiểu
địa phƣơng. Tốc độ hội tụ của mạng hầu nhƣ
Đào Thị Thu và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 3 - 7
7
không bị ảnh hƣởng bởi cỡ của bài toán.
Trong quá trình sử dụng khi cỡ của bài toán
lớn hoặc lẻ để tránh rơi vào cực tiểu địa
phƣơng nên thay đổi hệ số phạt cho phù hợp.
Để đảm bảo cho việc hội tụ đến toàn cục của
mạng nơron khi giải các bài toán tối ƣu,
chúng tôi dự định một số hƣớng nghiên cứu
tiếp theo trong thời gian tới là kết hợp mạng
nơron với giải thuật di truyền, xác định các hệ
số phạt bằng việc đƣa điều khiển mờ vào để
điều chỉnh.
TÀI LIỆU THAM KHẢO
[1]. Đặng Quang Á, “Một cách nhìn về việc sử
dụng mạng Hopfield giả bài toán thỏa mãn ràng
buộc”, báo cáo tại hội thảo quốc gia
[2]. Bùi Công Cƣờng, Nguyễn Doãn Phƣớc, 2001.
Hệ mờ, mạng nơron và ứng dụng. Nxb Khoa học
và Kỹ thuật
[3]. Hồ Thuần, Đặng Thanh Hà, 2002. Logic mờ
và ứng dụng. Nxb Đại học Quốc gia Hà Nội
[4].Vũ Nhƣ Lân, 2001. Điều khiển sử dụng logic
mờ mạng nơron và đại số gia tử. Nxb Khoa học và
kỹ thuật
[5]. Lê Minh Trung. Giáo trình mạng Noron nhân
tạo. Nxb Thống kê
[6]. Iu. G. Evtushenko, 1982. Numerical methods
for extremal problems and their applications in
optimization systems. Nauka, Moscow
[7] Martin, T.Hagan, 2002. Neural Network
Design
[8]. Y. Uesaka, Mathematical aspects of neuron-
dynamics for combinatorial optimization, In book
“Artificial neural networks”, Proc. of the 1991
Inter”
[9]. LiMin Fu, 1994. Neural Network in Computer
Intelligence. Mc. Graw Hill
SUMMARY
ON THE APPROACH OF USING COMBINED ARTIFICIAL NEURAL
NETWORKS FOR DETERMINING HILL-CLIMBING TERMS TO SOLVE
OPTIMIZATION PROBLEMS
Dao Thi Thu , Le Thu Trang, Tran Van Dinh College of Information and Communication Technology – TNU
Artificial Neural Networks have been studied to solve classes of problems including optimization
problems. Among optimization problems, 8-queen problem is a typical one and this problem is
easy to illustrate but difficult to be solved efficiently. The size of the solution space has the
complexity of Nn would create an explosive increase of the combinations resulting in difficulties in
solving the problem. In this paper, the authors present the results from the application of combined
artificial neural networks for determining hill-climbing terms for solving the 8-queen problem.
Keywords: Neural network , N-Queen, optimization, hill climbing.
Ngày nhận bài: 03/9/2013; Ngày phản biện:03/10/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: TS. Vũ Vinh Quang – Trường ĐH Công nghệ thông tin & TT - ĐHTN
Tel: 0912342000

Đào Thị Thu và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 3 - 7
8

Phạm Thị Hƣờng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 9 - 13
9
ỨNG DỤNG MẠNG NƠ-RON THÍCH NGHI MỜ ANFIS
DỰ BÁO CHỈ SỐ CHỨNG KHOÁN VNINDEX
Phạm Thị Hƣờng*, Nguyễn Thành Trung
Trường ĐH Công nghệ Thông tin và Truyền thông – ĐH Thái Nguyên
TÓM TẮT Thị trƣờng chứng khoán Việt Nam mở cửa cách đây 13 năm; kể từ đó bài toán phân tích, dự báo
chỉ số chứng khoán tài chính đƣợc nhiều ngƣời quan tâm. Các phƣơng pháp phân tích truyền thống
gồm phân tích cơ bản và phân tích kỹ thuật. Phân tích cơ bản nhằm vào các chỉ số hoạt động của
các công ty đăng ký cổ phiếu nhằm mục đích chọn ra một chứng khoán thích hợp cho mua hoặc
bán. Phân tích kỹ thuật chú ý tới biến đổi giá cả và khối lƣợng giao dịch nhằm xác định thời điểm
đầu tƣ thích hợp vào chứng khoán. Có nhiều mô hình có thể sử dụng để dự báo. Trong bài báo này
mô hình mạng ANFIS đƣợc sử dụng để dự báo giá mở của chỉ số VNINDEX ngày kế tiếp dựa
trên các dữ liệu quá khứ. Thực nghiệm cho thấy kết quả dự đoán sử dụng mạng ANFIS có độ
chính xác chấp nhận đƣợc trong thực tế.
Từ khóa: Dự báo chứng khoán, Mạng ANFIS trong bài toán dự báo, Logic mờ.
GIỚI THIỆU
Trong một ngày giao dịch của thị trƣờng
chứng khoán vấn đề xác định giá mở cửa
(Open Price) rất quan trọng đối với trung tâm
giao dịch chứng khoán và nhà đầu tƣ chứng
khoán (mua bán cổ phiếu). Trong phân tích
dự báo chứng khoán, giá mở cửa (Open Price)
đƣợc thực hiện nhƣ sau:
Khớp giá định kỳ: Khớp giá trƣớc giờ mở cửa
Trƣớc giờ mở cửa, sau khi tập hợp các lệnh
bán và lệnh mua (với giá chào mua và giá
chào bán khác nhau, khối lƣợng mong muốn
giao dịch khác nhau) và xác định giá mở cửa
là giá mà tại đó khối lƣợng chứng khoán giao
dịch đƣợc là lớn nhất. Giá này thỏa mãn nhu
cầu của ngƣời đặt lệnh, nghĩa là không ai phải
bán rẻ hơn giá chào bán của mình, không ai
phải mua đắt hơn giá chào mua của mình.
Quá trình này gọi là khớp giá.
Giá tham chiếu:
Ngoài ra, giá đóng cửa (Close Price) của thị
trƣờng chứng khoán ngày hôm trƣớc sẽ đƣợc
tham chiếu để xác định giá mở cửa (Open Price)
ngày hôm sau, tham chiếu ở đây là mang tính
gián tiếp vì ngƣời thực hiện việc tham chiếu này
là ngƣời đặt lệnh mua và bán, cách khớp giá để
tìm ra giá mở cửa là khớp lệnh định kỳ, còn từ
đó về sau là khớp giá liên tục.
Tel: 0978961395; Email: [email protected]
Giá đóng cửa ngày hôm trƣớc rất quan trọng
để xác định giá mở cửa ngày hôm sau, tuy
nhiên thông thƣờng hai giá trị này khác nhau,
vì vậy xây dựng mô hình dự báo giá mở cửa
của thị trƣờng chứng khoán là vấn đề cần
đƣợc giải quyết. Bài báo này đƣa ra mô hình
dự báo giá mở cửa của thị trƣờng chứng
khoán sử dụng mạng ANFIS. Bài báo gồm 5
phần: phần 1 giới thiệu chung, phần 2 trình
bày về cấu trúc mạng ANFIS, phần 3 đề cập
tới các thuật toán huấn luyện mạng để huấn
luyện dữ liệu , phần 4 đƣa ra các kết quả thực
nghiệm, Cuối cùng là một số kết luận.
CẤU TRÖC MẠNG ANFIS
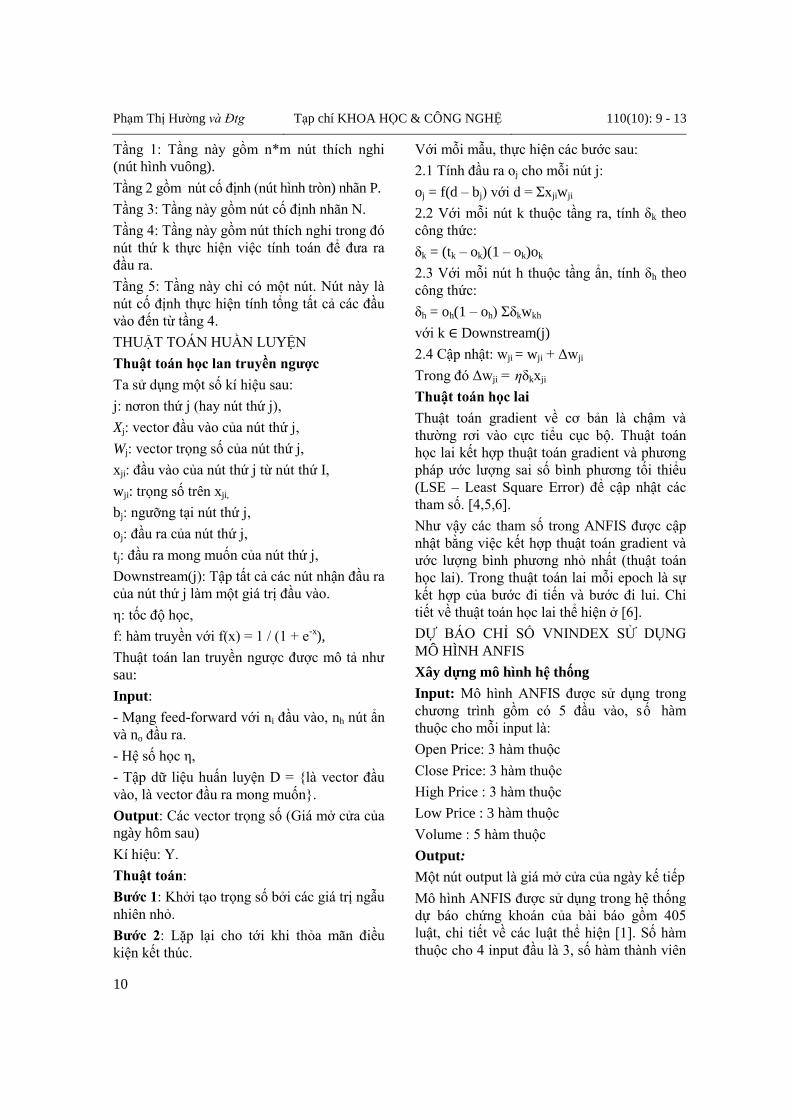
Hình 1 là một ví dụ về cấu trúc của ANFIS
với 3 đầu vào và hai nhãn ngôn ngữ cho mỗi
đầu vào. Trƣờng hợp tổng quát thì một mạng
ANFIS với n đầu vào và m nhãn ngôn ngữ
cho mỗi đầu vào có 5 tầng. Các hàm nút trong
một tầng thuộc cùng một họ.
Hình 1. Cấu trúc của ANFIS
Phạm Thị Hƣờng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 9 - 13
10
Tầng 1: Tầng này gồm n*m nút thích nghi
(nút hình vuông).
Tầng 2 gồm nút cố định (nút hình tròn) nhãn P.
Tầng 3: Tầng này gồm nút cố định nhãn N.
Tầng 4: Tầng này gồm nút thích nghi trong đó
nút thứ k thực hiện việc tính toán để đƣa ra
đầu ra.
Tầng 5: Tầng này chỉ có một nút. Nút này là
nút cố định thực hiện tính tổng tất cả các đầu
vào đến từ tầng 4.
THUẬT TOÁN HUẦN LUYỆN
Thuật toán học lan truyền ngƣợc
Ta sử dụng một số kí hiệu sau:
j: nơron thứ j (hay nút thứ j),
Xj: vector đầu vào của nút thứ j,
Wj: vector trọng số của nút thứ j,
xji: đầu vào của nút thứ j từ nút thứ I,
wji: trọng số trên xji,
bj: ngƣỡng tại nút thứ j,
oj: đầu ra của nút thứ j,
tj: đầu ra mong muốn của nút thứ j,
Downstream(j): Tập tất cả các nút nhận đầu ra
của nút thứ j làm một giá trị đầu vào.
η: tốc độ học,
f: hàm truyền với f(x) = 1 / (1 + e-x
),
Thuật toán lan truyền ngƣợc đƣợc mô tả nhƣ
sau:
Input:
- Mạng feed-forward với ni đầu vào, nh nút ẩn
và no đầu ra.
- Hệ số học η,
- Tập dữ liệu huấn luyện D = {là vector đầu
vào, là vector đầu ra mong muốn}.
Output: Các vector trọng số (Giá mở cửa của
ngày hôm sau)
Kí hiệu: Y.
Thuật toán:
Bƣớc 1: Khởi tạo trọng số bởi các giá trị ngẫu
nhiên nhỏ.
Bƣớc 2: Lặp lại cho tới khi thỏa mãn điều
kiện kết thúc.
Với mỗi mẫu, thực hiện các bƣớc sau:
2.1 Tính đầu ra oj cho mỗi nút j:
oj = f(d – bj) với d = Σxjiwji
2.2 Với mỗi nút k thuộc tầng ra, tính δk theo
công thức:
δk = (tk – ok)(1 – ok)ok
2.3 Với mỗi nút h thuộc tầng ẩn, tính δh theo
công thức:
δh = oh(1 – oh) Σδkwkh
với k ∈ Downstream(j)
2.4 Cập nhật: wji = wji + Δwji
Trong đó Δwji = ηδkxji
Thuật toán học lai
Thuật toán gradient về cơ bản là chậm và
thƣờng rơi vào cực tiểu cục bộ. Thuật toán
học lai kết hợp thuật toán gradient và phƣơng
pháp ƣớc lƣợng sai số bình phƣơng tối thiểu
(LSE – Least Square Error) để cập nhật các
tham số. [4,5,6].
Nhƣ vậy các tham số trong ANFIS đƣợc cập
nhật bằng việc kết hợp thuật toán gradient và
ƣớc lƣợng bình phƣơng nhỏ nhất (thuật toán
học lai). Trong thuật toán lai mỗi epoch là sự
kết hợp của bƣớc đi tiến và bƣớc đi lui. Chi
tiết về thuật toán học lai thể hiện ở [6].
DỰ BÁO CHỈ SỐ VNINDEX SỬ DỤNG
MÔ HÌNH ANFIS
Xây dựng mô hình hệ thống
Input: Mô hình ANFIS đƣợc sử dụng trong
chƣơng trình gồm có 5 đầu vào, số hàm
thuộc cho mỗi input là:
Open Price: 3 hàm thuộc
Close Price: 3 hàm thuộc
High Price : 3 hàm thuộc
Low Price : 3 hàm thuộc
Volume : 5 hàm thuộc
Output:
Một nút output là giá mở cửa của ngày kế tiếp
Mô hình ANFIS đƣợc sử dụng trong hệ thống
dự báo chứng khoán của bài báo gồm 405
luật, chi tiết về các luật thể hiện [1]. Số hàm
thuộc cho 4 input đầu là 3, số hàm thành viên
Phạm Thị Hƣờng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 9 - 13
11
cho input thứ 5 (Volume) là 5. Sự biến đổi giá
chứng khoán là lên, xuống và phẳng lặng cho
nên số hàm thuộc đƣợc chọn cho dữ liệu cho
các đầu vào này là 3. Trong khi đó số phiên
giao dịch có nhiều mức thay đổi nên số hàm
thuộc đƣợc chọn là 5.
Dữ liệu
Dữ liệu sử dụng trong bài báo là dữ liệu về
chỉ số VNINDEX từ 03/2008 đến 09/2013
trong đó dữ liệu từ 08 /2008 sử dụng để huấn
luyện, phần dữ liệu còn lại phục vụ việc kiểm
tra [2,3]. Dữ liệu đƣợc chuẩn hóa đƣa về [0,1]
theo công thức:
( 4.1)
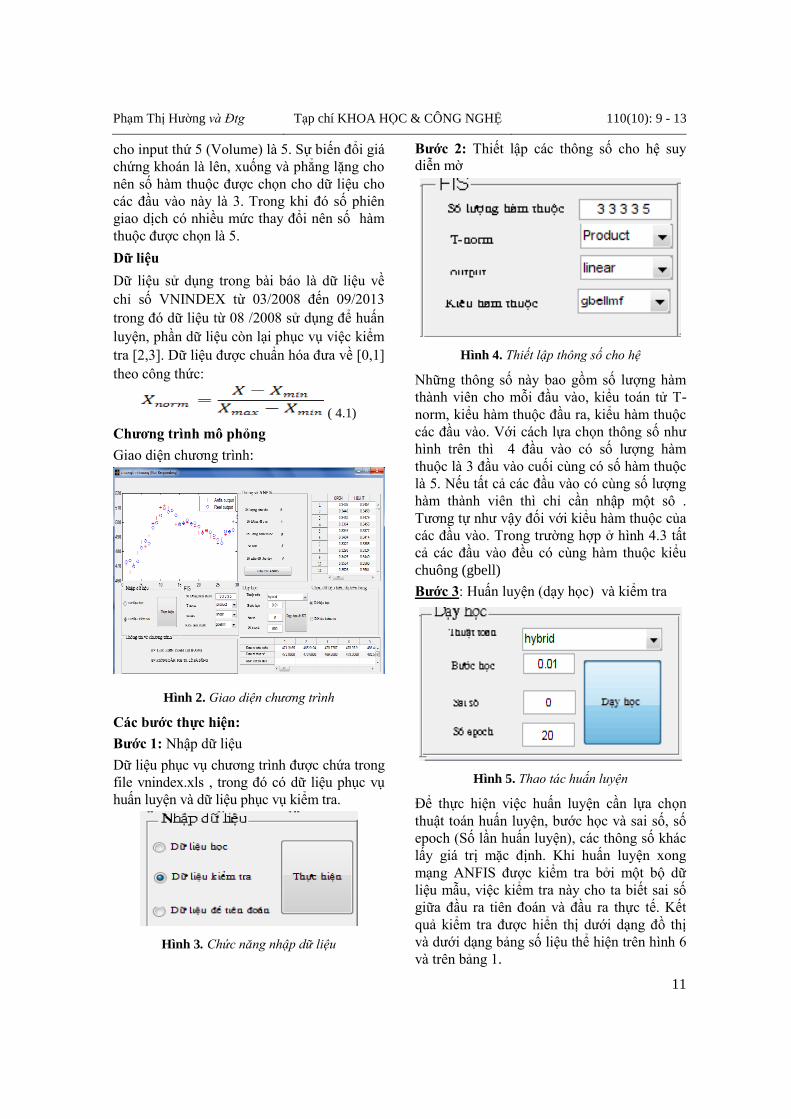
Chƣơng trình mô phỏng
Giao diện chƣơng trình:
Hình 2. Giao diện chương trình
Các bƣớc thực hiện:
Bƣớc 1: Nhập dữ liệu
Dữ liệu phục vụ chƣơng trình đƣợc chứa trong
file vnindex.xls , trong đó có dữ liệu phục vụ
huấn luyện và dữ liệu phục vụ kiểm tra.
Hình 3. Chức năng nhập dữ liệu
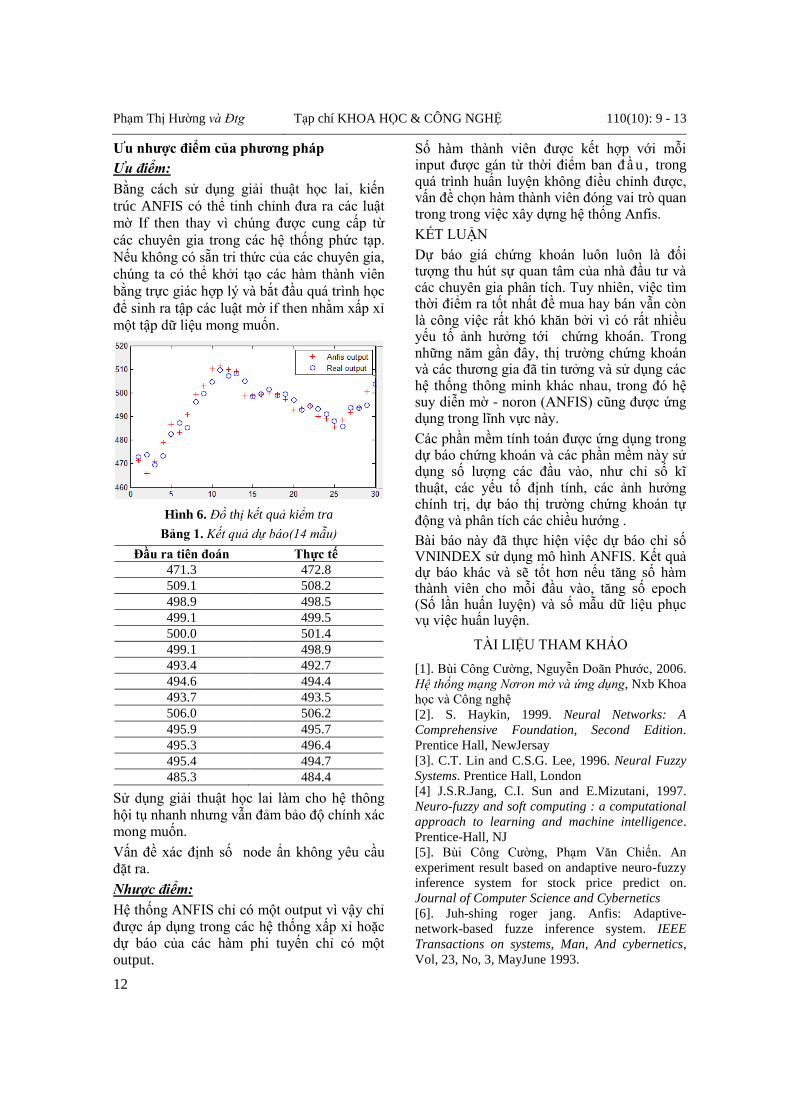
Bƣớc 2: Thiết lập các thông số cho hệ suy
diễn mờ
Hình 4. Thiết lập thông số cho hệ
Những thông số này bao gồm số lƣợng hàm
thành viên cho mỗi đầu vào, kiểu toán tử T-
norm, kiểu hàm thuộc đầu ra, kiểu hàm thuộc
các đầu vào. Với cách lựa chọn thông số nhƣ
hình trên thì 4 đầu vào có số lƣợng hàm
thuộc là 3 đầu vào cuối cùng có số hàm thuộc
là 5. Nếu tất cả các đầu vào có cùng số lƣợng
hàm thành viên thì chỉ cần nhập một sô .
Tƣơng tự nhƣ vậy đối với kiểu hàm thuộc của
các đầu vào. Trong trƣờng hợp ở hình 4.3 tất
cả các đầu vào đều có cùng hàm thuộc kiểu
chuông (gbell)
Bƣớc 3: Huấn luyện (dạy học) và kiểm tra
Hình 5. Thao tác huấn luyện
Để thực hiện việc huấn luyện cần lựa chọn
thuật toán huấn luyện, bƣớc học và sai số, số
epoch (Số lần huấn luyện), các thông số khác
lấy giá trị mặc định. Khi huấn luyện xong
mạng ANFIS đƣợc kiểm tra bởi một bộ dữ
liệu mẫu, việc kiểm tra này cho ta biết sai số
giữa đầu ra tiên đoán và đầu ra thực tế. Kết
quả kiểm tra đƣợc hiển thị dƣới dạng đồ thị
và dƣới dạng bảng số liệu thể hiện trên hình 6
và trên bảng 1.
Phạm Thị Hƣờng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 9 - 13
12
Ƣu nhƣợc điểm của phƣơng pháp
Ưu điểm:
Bằng cách sử dụng giải thuật học lai, kiến
trúc ANFIS có thể tinh chỉnh đƣa ra các luật
mờ If then thay vì chúng đƣợc cung cấp từ
các chuyên gia trong các hệ thống phức tạp.
Nếu không có sẵn tri thức của các chuyên gia,
chúng ta có thể khởi tạo các hàm thành viên
bằng trực giác hợp lý và bắt đầu quá trình học
để sinh ra tập các luật mờ if then nhằm xấp xỉ
một tập dữ liệu mong muốn.
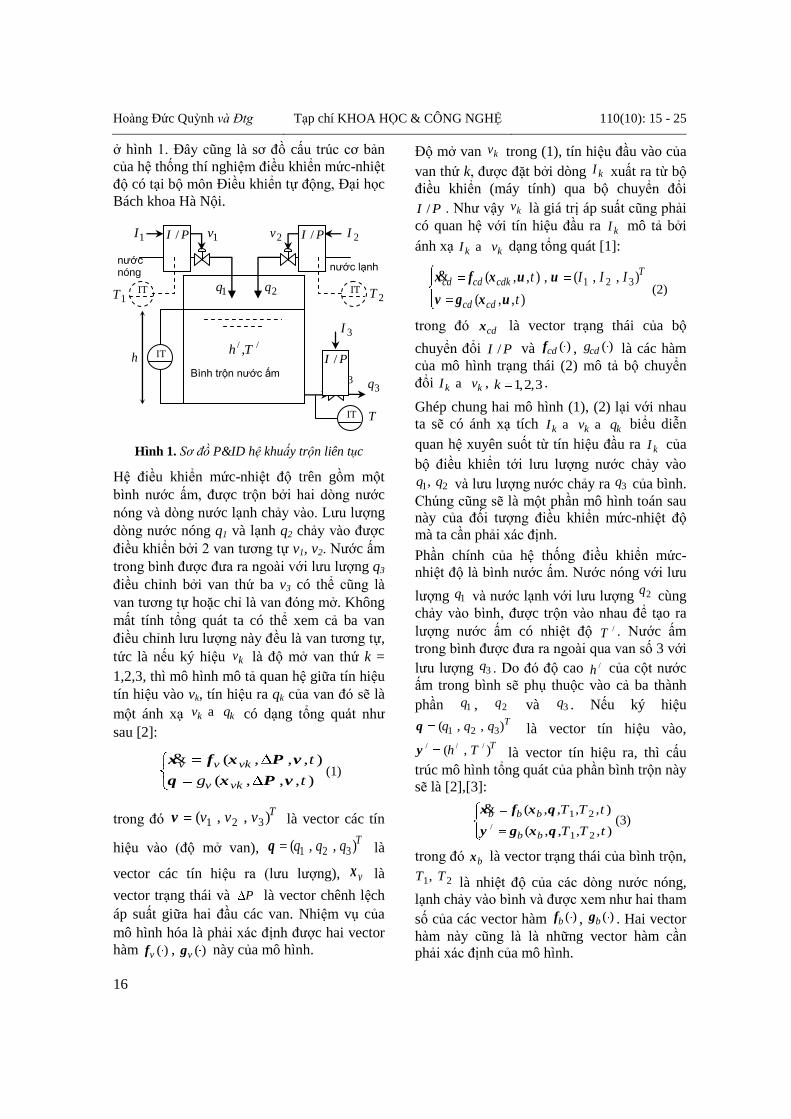
Hình 6. Đồ thị kết quả kiểm tra
Bảng 1. Kết quả dự báo(14 mẫu)
Đầu ra tiên đoán Thực tế
471.3 472.8
509.1 508.2
498.9 498.5
499.1 499.5
500.0 501.4
499.1 498.9
493.4 492.7
494.6 494.4
493.7 493.5
506.0 506.2
495.9 495.7
495.3 496.4
495.4 494.7
485.3 484.4
Sử dụng giải thuật học lai làm cho hệ thông
hội tụ nhanh nhƣng vẫn đảm bảo độ chính xác mong muốn.
Vấn đề xác định số node ẩn không yêu cầu đặt ra.
Nhược điểm:
Hệ thống ANFIS chỉ có một output vì vậy chỉ
đƣợc áp dụng trong các hệ thống xấp xỉ hoặc dự báo của các hàm phi tuyến chỉ có một output.
Số hàm thành viên đƣợc kết hợp với mỗi input đƣợc gán từ thời điểm ban đ ầ u , trong quá trình huấn luyện không điều chỉnh đƣợc, vấn đề chọn hàm thành viên đóng vai trò quan trong trong việc xây dựng hệ thống Anfis.
KẾT LUẬN
Dự báo giá chứng khoán luôn luôn là đối tƣợng thu hút sự quan tâm của nhà đầu tƣ và các chuyên gia phân tích. Tuy nhiên, việc tìm thời điểm ra tốt nhất đề mua hay bán vẫn còn là công việc rất khó khăn bởi vì có rất nhiều yếu tố ảnh hƣởng tới chứng khoán. Trong những năm gần đây, thị trƣờng chứng khoán và các thƣơng gia đã tin tƣởng và sử dụng các hệ thống thông minh khác nhau, trong đó hệ suy diễn mờ - noron (ANFIS) cũng đƣợc ứng dụng trong lĩnh vực này.
Các phần mềm tính toán đƣợc ứng dụng trong dự báo chứng khoán và các phần mềm này sử dụng số lƣợng các đầu vào, nhƣ chỉ số kĩ thuật, các yếu tố định tính, các ảnh hƣởng chính trị, dự báo thị trƣờng chứng khoán tự động và phân tích các chiều hƣớng .
Bài báo này đã thực hiện việc dự báo chỉ số VNINDEX sử dụng mô hình ANFIS. Kết quả dự báo khác và sẽ tốt hơn nếu tăng số hàm thành viên cho mỗi đầu vào, tăng số epoch (Số lần huấn luyện) và số mẫu dữ liệu phục vụ việc huấn luyện.
TÀI LIỆU THAM KHẢO
[1]. Bùi Công Cƣờng, Nguyễn Doãn Phƣớc, 2006.
Hệ thống mạng Nơron mờ và ứng dụng, Nxb Khoa
học và Công nghệ
[2]. S. Haykin, 1999. Neural Networks: A
Comprehensive Foundation, Second Edition.
Prentice Hall, NewJersay
[3]. C.T. Lin and C.S.G. Lee, 1996. Neural Fuzzy
Systems. Prentice Hall, London
[4] J.S.R.Jang, C.I. Sun and E.Mizutani, 1997.
Neuro-fuzzy and soft computing : a computational
approach to learning and machine intelligence.
Prentice-Hall, NJ
[5]. Bùi Công Cƣờng, Phạm Văn Chiến. An
experiment result based on andaptive neuro-fuzzy
inference system for stock price predict on.
Journal of Computer Science and Cybernetics
[6]. Juh-shing roger jang. Anfis: Adaptive-
network-based fuzze inference system. IEEE
Transactions on systems, Man, And cybernetics,
Vol, 23, No, 3, MayJune 1993.

Hoàng Đức Quỳnh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 15 - 25
13
SUMMARY
PPLYING ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
TO FORECAST VN-INDEX
Pham Thi Huong
*, Nguyen Thanh Trung
College of Information and Communication Technology – TNU
Vietnamese stock market has opened for 13 years and there for the problem of predicting and
analysing has been attending by many people. Traditional method consist of basic analysis and
engineering analysis the first tends to index of stock companies to choose suitable stock to
insvestment, the second in order to determine the time to investment. There are many model to
analyse and predict. In this paper, ANFIS model is used to predict open price of VNINDEX of
next day base on pass data. The impliment show that using ANFIS model to predict give quite
exacly relult.
Keywords: Stock index forecast, Anfis Network in forecast problem, fuzzy logic.
Ngày nhận bài: 02/9/2013; Ngày phản biện:05/10/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: TS. Phạm Đức Long – Trường ĐH Công nghệ thông tin & TT - ĐHTN
* Tel: 0978961395; Email: [email protected]

Phạm Thị Hƣờng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 9 - 13
14

Hoàng Đức Quỳnh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 15 - 25
15
XÂY DỰNG MÔ HÌNH PHI TUYẾN CHO HỆ ĐIỀU KHIỂN MỨC - NHIỆT ĐỘ
VÀ PHÂN TÍCH HỆ THỐNG
Hoàng Đức Quỳnh
1,*, Nguyễn Doãn Phƣớc
2
1Trường CĐ Công nghệ và Kinh tế Công nghiệp, 2Đại học Bách Khoa Hà Nội
TÓM TẮT Bài toán với yêu cầu công nghệ là điều khiển hai yếu tố mức và nhiệt độ đƣợc đặt ra trong rất
nhiều các nhà máy công nghiệp. Bài báo thực hiện xây dựng mô hình phi tuyến cho hệ thống điều
khiển mức-nhiệt độ, từ đó tiến hành mô phỏng và phân tích hệ thống.Việc xây dựng mô hình toán
phi tuyến cho hệ thống sẽ góp phần tạo điều kiện thuận lợi cho việc nghiên cứu thiết kế các bộ
điều khiển mới để nâng cao chất lƣợng hệ thống.
Từ khóa: Mô hình hóa, Điều khiển quá trình, Hệ thống điều khiển mức - nhiệt độ.
ĐẶT VẤN ĐỀ*
Điều khiển quá trình trong các nhà máy công
nghiệp không phải là một lĩnh vực mới nhƣng
luôn chiếm vị trí quan trọng hàng đầu trong tự
động hóa công nghiệp. Nội dung của lĩnh vực
điều khiển quá trình là sự kết hợp của nhiều
bài toán nhỏ gồm: (i) bài toán phân tích, (ii)
bài toán mô hình hóa, (iii) bài toán thiết kế và
thực thi hệ thống điều khiển trên cơ sở nền
tảng là lý thuyết điều khiển tự động. Trong
các nhà máy hóa chất cần sử dụng rất nhiều
các hệ thống điều khiển nhiều đầu vào, nhiều
đầu ra và hệ thống điều khiển mức-nhiệt độ là
một hệ thống điển hình đƣợc sử dụng rất
nhiều trong thực tế. Để nâng cao chất lƣợng
điều khiển thì việc nghiên cứu, thiết kế và đề
xuất ra các phƣơng pháp và các bộ điều khiển
mới luôn đƣợc quan tâm và thực hiện. Để
thiết kế các bộ điều khiển cho hệ thống thì
trƣớc tiên chúng ta phải giải quyết bài toán
phân tích và mô hình hóa hệ thống.
Trong nội dung của bài báo, vấn đề nhóm tác
giả muốn đề cập đến ở đây là mô hình hóa hệ
thống điều khiển mức – nhiệt độ và tiến hành
phân tích hệ thống này. Việc mô hình hóa
đƣợc hệ thống một cách đủ chính xác sẽ giúp
chúng ta sử dụng hiệu quả các phƣơng pháp
điều khiển mới, hiện đại trong quá trình điều
khiển mức-nhiệt độ, từ đó nâng cao đƣợc chất
lƣợng điều khiển trong thực tế sản xuất.
* Email: [email protected]
Do không phải là đối tƣợng mới đƣợc nghiên cứu nên việc mô hình hóa hệ thống điều khiển mức-nhiệt độ đã có nhiều công trình, kết quả đã đƣợc công bố trƣớc đây, chẳng hạn nhƣ [2],[3] song có thể nói các kết quả này tập trung chủ yếu vào việc xây dựng mô hình xấp xỉ tuyến tính. Những cơ cấu chấp hành, cảm biến kèm theo trong hệ thống đều đƣợc xem là lý tƣởng. Do đó các kết quả phân tích và thiết kế bộ điều khiển sau này đƣợc xây dựng trên những mô hình xấp xỉ tuyến tính đều chứa đựng trong nó nhiều yếu tố không chắc chắn, cũng nhƣ chất lƣợng điều khiển chỉ có thể đƣợc đảm bảo khi các giả thiết áp dụng trong quá trình xây dựng mô hình tuyến tính đƣợc thỏa mãn.
Nhằm đặt đƣợc nền tảng cho bài toán phân tích và điều khiển hệ thống điều khiển mức-nhiệt độ sau này một cách chắc chắn hơn, cần thiết chúng ta phải có đƣợc một mô hình toán hoàn thiện và tổng quát hơn, với số các giả thiết cần đƣợc sử dụng trong quá trình mô hình hóa là ít nhất tới mức có thể. Từ lập luận nhƣ vậy, bài báo này đã đặt ra nhiệm vụ xây dựng mô hình toán cho hệ thống điều khiển mức-nhiệt độ ở mức độ tổng quát tối đa, trong đó chứa đựng đƣợc cả những ảnh hƣởng động học của thiết bị chấp hành, cảm biến tới chất lƣợng hệ thống.
MÔ HÌNH HÓA HỆ THỐNG ĐIỀU KHIỂN
MỨC-NHIỆT ĐỘ
Cấu trúc hệ thống và nhiệm vụ mô hình hóa
Đối tƣợng điều khiển mức-nhiệt độ với tất cả
các cơ cấu chấp hành, cảm biến kèm theo, là
một hệ thống nhiều chiều, có sơ đồ P&ID cho
Hoàng Đức Quỳnh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 15 - 25
16
ở hình 1. Đây cũng là sơ đồ cấu trúc cơ bản
của hệ thống thí nghiệm điều khiển mức-nhiệt
độ có tại bộ môn Điều khiển tự động, Đại học
Bách khoa Hà Nội.
Hình 1. Sơ đồ P&ID hệ khuấy trộn liên tục
Hệ điều khiển mức-nhiệt độ trên gồm một
bình nƣớc ấm, đƣợc trộn bởi hai dòng nƣớc
nóng và dòng nƣớc lạnh chảy vào. Lƣu lƣợng
dòng nƣớc nóng q1 và lạnh q2 chảy vào đƣợc
điều khiển bởi 2 van tƣơng tự v1, v2. Nƣớc ấm
trong bình đƣợc đƣa ra ngoài với lƣu lƣợng q3
điều chỉnh bởi van thứ ba v3 có thể cũng là
van tƣơng tự hoặc chỉ là van đóng mở. Không
mất tính tổng quát ta có thể xem cả ba van
điều chỉnh lƣu lƣợng này đều là van tƣơng tự,
tức là nếu ký hiệu kv là độ mở van thứ k =
1,2,3, thì mô hình mô tả quan hệ giữa tín hiệu
tín hiệu vào vk, tín hiệu ra qk của van đó sẽ là
một ánh xạ k kv qa có dạng tổng quát nhƣ
sau [2]:
( , , , )
( , , , )
v v vk
v vk
t
g t
&x f x P v
q x P v(1)
trong đó 1 2 3( , , )Tv v vv là vector các tín
hiệu vào (độ mở van), 1 2 3( , , )Tq q qq là
vector các tín hiệu ra (lƣu lƣợng), vx là
vector trạng thái và P là vector chênh lệch
áp suất giữa hai đầu các van. Nhiệm vụ của
mô hình hóa là phải xác định đƣợc hai vector
hàm ( )vf , ( )vg này của mô hình.
Độ mở van kv trong (1), tín hiệu đầu vào của
van thứ k, đƣợc đặt bởi dòng kI xuất ra từ bộ
điều khiển (máy tính) qua bộ chuyển đổi
/I P . Nhƣ vậy kv là giá trị áp suất cũng phải
có quan hệ với tín hiệu đầu ra kI mô tả bởi
ánh xạ k kI va dạng tổng quát [1]:
1 2 3( , , ) , ( , , )
( , , )
Tcd cd cdk
cd cd
t I I I
t
&x f x u u
v g x u(2)
trong đó cdx là vector trạng thái của bộ
chuyển đổi /I P và ( )cdf , ( )cdg là các hàm
của mô hình trạng thái (2) mô tả bộ chuyển
đổi k kI va , 1,2,3k .
Ghép chung hai mô hình (1), (2) lại với nhau
ta sẽ có ánh xạ tích k k kI v qa a biểu diễn
quan hệ xuyên suốt từ tín hiệu đầu ra kI của
bộ điều khiển tới lƣu lƣợng nƣớc chảy vào
1 2, q q và lƣu lƣợng nƣớc chảy ra 3q của bình.
Chúng cũng sẽ là một phần mô hình toán sau
này của đối tƣợng điều khiển mức-nhiệt độ
mà ta cần phải xác định.
Phần chính của hệ thống điều khiển mức-
nhiệt độ là bình nƣớc ấm. Nƣớc nóng với lƣu
lƣợng 1q và nƣớc lạnh với lƣu lƣợng 2q cùng
chảy vào bình, đƣợc trộn vào nhau để tạo ra
lƣợng nƣớc ấm có nhiệt độ /T . Nƣớc ấm
trong bình đƣợc đƣa ra ngoài qua van số 3 với
lƣu lƣợng 3q . Do đó độ cao /h của cột nƣớc
ấm trong bình sẽ phụ thuộc vào cả ba thành
phần 1q , 2q và 3q . Nếu ký hiệu
1 2 3( , , )Tq q qq là vector tín hiệu vào, / / /( , )Th Ty là vector tín hiệu ra, thì cấu
trúc mô hình tổng quát của phần bình trộn này
sẽ là [2],[3]:
/
1 2
1 2
( , , , , )
( , , , , )
b b b
b b
T T t
T T t
&x f x q
y g x q(3)
trong đó bx là vector trạng thái của bình trộn,
1 2, T T là nhiệt độ của các dòng nƣớc nóng,
lạnh chảy vào bình và đƣợc xem nhƣ hai tham
số của các vector hàm ( )bf , ( )bg . Hai vector
hàm này cũng là là những vector hàm cần
phải xác định của mô hình.
1T
3v
1I
1v
2I
2v
h
3I
3q
T
1q
2q
nước nóng
nước lạnh
Bình trộn nước ấm
/I P
/I P
/I P
IT
/ /,h T
IT
2T
IT
IT

Hoàng Đức Quỳnh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 15 - 25
17
Cuối cùng, hai tín hiệu ra / / /( , )Th Ty của
bình nƣớc ấm đƣợc đo bằng cảm biến mức và
cảm biến nhiệt PT100 để phản hồi về bộ điều
khiển. Ký hiệu giá trị đo đƣợc tƣơng ứng của
chúng là ( , )Th Ty thì mô hình toán tổng
quát của các cảm biến đo để chuyển đổi / ay y của cảm biến sẽ là [1]:
/
/
( , , )
( , , ) ( )
cb cb cb
cb cb
t
t t
&x f x y
y g x y n(4)
trong đó ( )tn là các nhiễu đo.
Hình 2. Sơ đồ khối tương đương của hệ thống
mức-nhiệt độ
Hình 2 biểu diễn lại cấu trúc hệ thống điều
khiển mức-nhiệt độ dƣới dạng sơ đồ khối bao
gồm các hệ con (1), (2), (3) và (4) mắc nối
tiếp với nhau. Nhƣ vậy toàn bộ hệ thống điều
khiển mức-nhiệt độ sẽ có ba đầu vào
1 2 3( , , )TI I Iu và hai đầu ra ( , )Th Ty .
Nhiệm vụ mô hình hóa hệ thống là phải xác
định các hàm số hay vector các hàm số ( )vkf ,
( )vg , ( )cdf , ( )cdg cũng nhƣ ( )bf , ( )bg , ( )cbf , ( )cbg của các hệ con (1), (2), (3), (4)
trong nó. Phƣơng pháp xác định các hàm trên
có thể là bằng lý thuyết với những định luật
cân bằng hóa lý, hoặc cũng có thể là bằng
thực nghiệm thông qua đo đạc các tín hiệu
vào ra.
Mô hình hóa bình nước ấm (3)
Bình nƣớc ấm là một hệ con của hệ thống
(hình 2). Hệ con này có ba tín hiệu đầu vào là
lƣu lƣợng nƣớc nóng, nƣớc lạnh 1 2 , q q chảy
vào bình và lƣu lƣợng nƣớc ấm 3q chảy ra
khỏi bình. Chúng đƣợc viết chung lại thành
vector các tín hiệu vào 1 2 3( , , )Tq q qq . Tín
hiệu ra của hệ con là độ cao /h và nhiệt độ
/T của nƣớc ấm trong bình. Chúng đƣợc ghép
chung thành vector / / /( , )Th Ty . Cấu trúc
mô hình toán của hệ cho bởi công thức (3).
Để mô hình hóa hệ con, ta phải xác định các
hàm ( )bf , ( )bg trong đó.
Giả thiết bình có dạng hình trụ với diện tích
đáy S . Khi đó thể tích nƣớc ấm trong bình là /V h S với /h là độ cao của cột nƣớc ấm.
Ký hiệu tiếp 1 2, , lần lƣợt là khối lƣợng
riêng của nƣớc ấm, nƣớc nóng và nƣớc lạnh
chảy vào bình, ta sẽ có từ phƣơng trình cân
bằng khối lƣợng [3]:
1 1 2 2 3
d Vq q q
dt
thành phần thứ nhất của vector hàm ( )bf
trong (3) nhƣ sau:
/
1 1 2 2 3
1dhq q q
dt S(5)
Để có đƣợc thành phần thứ hai của vector ( )bf trong công thức (3) mô tả sự thay đổi
nhiệt độ /T nƣớc ấm trong bình, ta cần đến
các phƣơng trình cân bằng nhiệt, đƣợc xây
dựng theo nguyên lý bảo toàn năng lƣợng áp
dụng cho một hệ nhiệt động học, hay còn gọi
là định luật thứ nhất nhiệt động lực học, phát
biểu nhƣ sau [2],[3]:
Biến thiên năng lượng tích lũy = Tổng năng
lượng vào Tổng dòng năng lượng ra + Tổng
công suất nhiệt mất đi.
Dựa vào định luật cân bằng trên và với ký
hiệu IU cho năng lƣợng tích lũy, 1 2, , e e e là
hệ số enthalpy của các dòng nƣớc ấm, nóng
và lạnh cũng nhƣ /q là tổng công suất nhiệt
sinh ra và mất đi do quá trình hấp thụ, bức xạ
của các phản ứng hóa học trong bình, ta có
phƣơng trình cân bằng nhiệt động học sau:
/1 1 1 2 2 2 3
IdUe q e q e q q
dt
(6)
Trong phƣơng trình cân bằng nhiệt trên, hệ số
enthalpy là đại lƣợng phụ thuộc vào thành
phần, nhiệt độ và áp suất, định nghĩa bởi [3]:
Ie u pV)
1P
2P
1T
2T
u
v
q
/y
y
Chuyển đổi
/I P
(2)
Hệ thống
van (1)
Bình nước ấm (3)
Cảm biến (4)
P
n

Hoàng Đức Quỳnh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 15 - 25
18
với Iu là nội năng (năng lƣợng tích lũy) tính
trên một đơn vị khối lƣợng, p là áp suất lên
thành bình và V)
là thể tích riêng, tức là giá trị
nghịch đảo của khối lƣợng riêng . Theo
[3] thì đối với vật chất là chất lỏng ngƣời ta
có thể xấp xỉ 0pV)
. Nhƣ vậy, cùng với
I IU Vu và e CT với C là nhiệt dung
riêng và T là nhiệt độ của một chất lỏng nói
chung, phƣơng trình cân bằng nhiệt (6) đƣợc
rút gọn thành:
/
/1 1 1 1 2 2 2 2 3
d VCTC T q C T q CT q
dt
Do hệ điều khiển mức-nhiệt độ là biến đổi
chậm nên và giá trị nhiệt dung riêng C ,
định nghĩa bởi [3]:
constP
eC
T
có thể đƣợc xem là hằng số. Từ đây suy ra:
/
/1 1 1 1 2 2 2 2 3
d VTC C T q C T q CT q
dt
(7)
trong đó 1 1, C T lần lƣợt là nhiệt dung riêng,
nhiệt độ của nƣớc nóng, 2 2, C T là nhiệt dung
riêng, nhiệt độ của nƣớc lạnh, cũng nhƣ /, C T là nhiệt dung riêng và nhiệt độ của
nƣớc ấm trong bình.
Thay tiếp quan hệ hiển nhiên:
/ // // / /
/ // /
d VT d ShdT dV dTV T Sh T
dt dt dt dt dt
dT dhSh T S
dt dt
vào (7), ta có:
/ // /
/1 1 1 1 2 2 2 2 3
1
dT dhSh T S
dt dt
C T q C T q CT qC
Cuối cùng, sử dụng lại công thức (5) cho
phƣơng trình thứ hai này, ta đi đến: /
/
/
/
1 1 1 1 2 2 2 2 3
1 1 2 2 3
1
dTC T q C T q CT q
dt CSh
CT q q q (8)
Ghép chung (5) và (8) lại với nhau, ta có mô
hình đầy đủ cho hệ con (3) của hệ điều khiển
mức-nhiệt độ nhƣ sau:
/
/
/ /
/
1 1 2 2 3
1 1 1 1 2 2 2 2
1
1
dhq q q
dt S
dTC T CT q C T CT q
dt CSh
(9)
trong đó:
1 2, , C C C lần lƣợt là nhiệt dung riêng của nƣớc ấm, nƣớc nóng và nƣớc lạnh,
1 2, T T là nhiệt độ của nƣớc nóng và nƣớc
lạnh
1 2, , là khối lƣợng riêng của nƣớc ấm, nƣớc nóng và nƣớc lạnh
1 2 3( , , )Tq q qq là vector các lƣu lƣợng nƣớc nóng, nƣớc lạnh, nƣớc ấm. Chúng đƣợc xem là các tín hiệu đầu vào của hệ
/ / /( , )Tb h Ty x là vector các biến trạng
thái, đồng thời cũng là tín hiệu ra của hệ.
Nhƣ vậy các vector hàm ( )bf , ( )bg trong (3)
bây giờ có dạng cụ thể là:
/ /
/
/
/
1 1 2 2 3
1 1 1 1 2 2 2 2
1( )
( )
b
b
q q q
C T CT q C T CT qS
h C
h
T
f
g
(10)
Mô hình hóa bộ chuyển đổi /I P (2)
Khối chuyển đổi /I P có nhiệm vụ chuyển ba
tín hiệu đặt độ mở van 1 2 3 , , I I I lấy từ máy
tính, dƣới dạng dòng điện 4 20 [ ]mA , thành
áp suất tƣơng ứng có giá trị nằm trong khoảng
0,2 1,4 [ ]atm , cho ba van áp lực, đƣợc chuẩn
hóa với khoảng giá trị 0 1 cho độ mở van
1 2 3 , , v v v . Khối chuyển đổi này gồm ba phần
tử chuyển đổi độc lập. Hình H3 mô tả cấu
trúc cơ bản của một phần tử chuyển đổi đó.
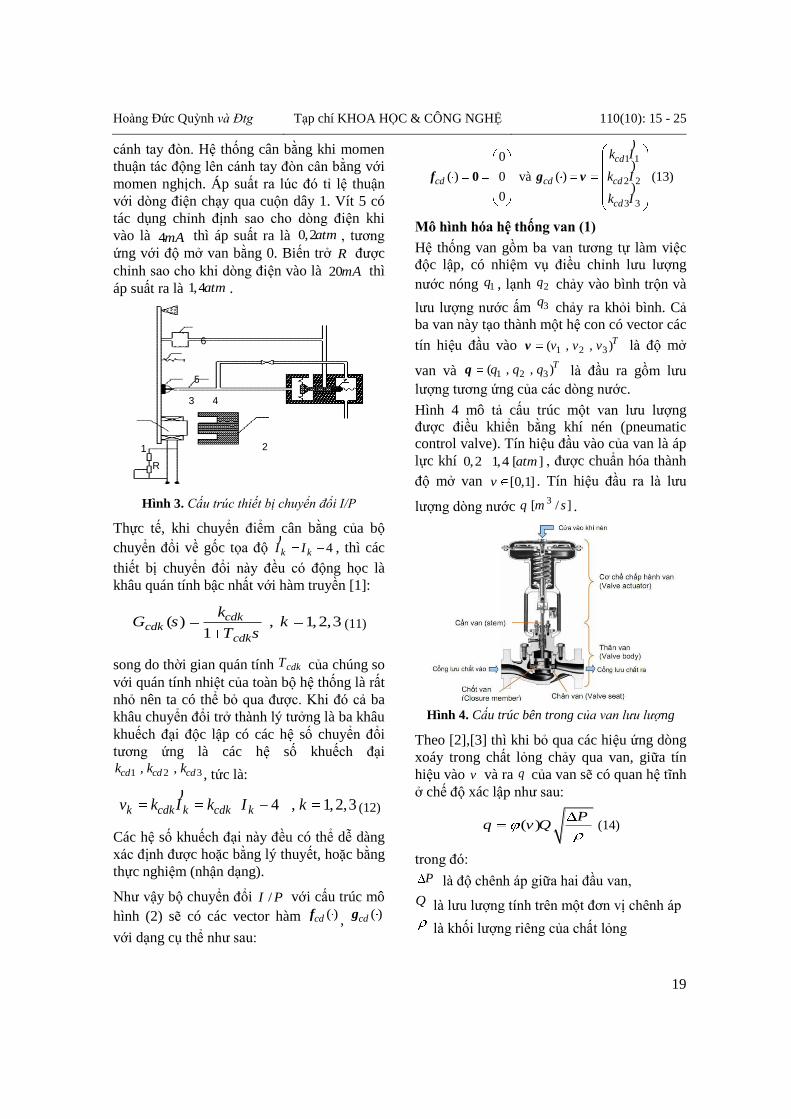
Khi có dòng điện chạy qua, cuộn dây 1 bị
nam châm 2 hút xuống, vòi phun 4 bị nắp đậy
3 đậy bớt lại, kết quả làm tăng áp suất trong
buồng A, van cầu 7 mở ra và áp suất tăng lên.
Áp suất ra xiphong 6 tác động ngƣợc trở lại
Hoàng Đức Quỳnh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 15 - 25
19
cánh tay đòn. Hệ thống cân bằng khi momen
thuận tác động lên cánh tay đòn cân bằng với
momen nghịch. Áp suất ra lúc đó tỉ lệ thuận
với dòng điện chạy qua cuộn dây 1. Vít 5 có
tác dụng chỉnh định sao cho dòng điện khi
vào là 4mA thì áp suất ra là 0,2atm , tƣơng
ứng với độ mở van bằng 0. Biến trở R đƣợc
chỉnh sao cho khi dòng điện vào là 20mA thì
áp suất ra là 1,4atm .
Hình 3. Cấu trúc thiết bị chuyển đổi I/P
Thực tế, khi chuyển điểm cân bằng của bộ
chuyển đổi về gốc tọa độ 4k kI I)
, thì các
thiết bị chuyển đổi này đều có động học là
khâu quán tính bậc nhất với hàm truyền [1]:
( ) , 1,2,31
cdkcdk
cdk
kG s k
T s(11)
song do thời gian quán tính cdkT của chúng so
với quán tính nhiệt của toàn bộ hệ thống là rất
nhỏ nên ta có thể bỏ qua đƣợc. Khi đó cả ba
khâu chuyển đổi trở thành lý tƣởng là ba khâu
khuếch đại độc lập có các hệ số chuyển đổi
tƣơng ứng là các hệ số khuếch đại
1 2 3 , , cd cd cdk k k , tức là:
4 , 1,2,3k cdk k cdk kv k I k I k)
(12)
Các hệ số khuếch đại này đều có thể dễ dàng
xác định đƣợc hoặc bằng lý thuyết, hoặc bằng
thực nghiệm (nhận dạng).
Nhƣ vậy bộ chuyển đổi /I P với cấu trúc mô
hình (2) sẽ có các vector hàm ( )cdf , ( )cdg
với dạng cụ thể nhƣ sau:
0
( ) 0
0
cd 0f và
1 1
2 2
3 3
( )
cd
cd cd
cd
k I
k I
k I
)
)
)g v (13)
Mô hình hóa hệ thống van (1)
Hệ thống van gồm ba van tƣơng tự làm việc
độc lập, có nhiệm vụ điều chỉnh lƣu lƣợng
nƣớc nóng 1q , lạnh 2q chảy vào bình trộn và
lƣu lƣợng nƣớc ấm 3q chảy ra khỏi bình. Cả
ba van này tạo thành một hệ con có vector các
tín hiệu đầu vào 1 2 3( , , )Tv v vv là độ mở
van và 1 2 3( , , )Tq q qq là đầu ra gồm lƣu
lƣợng tƣơng ứng của các dòng nƣớc.
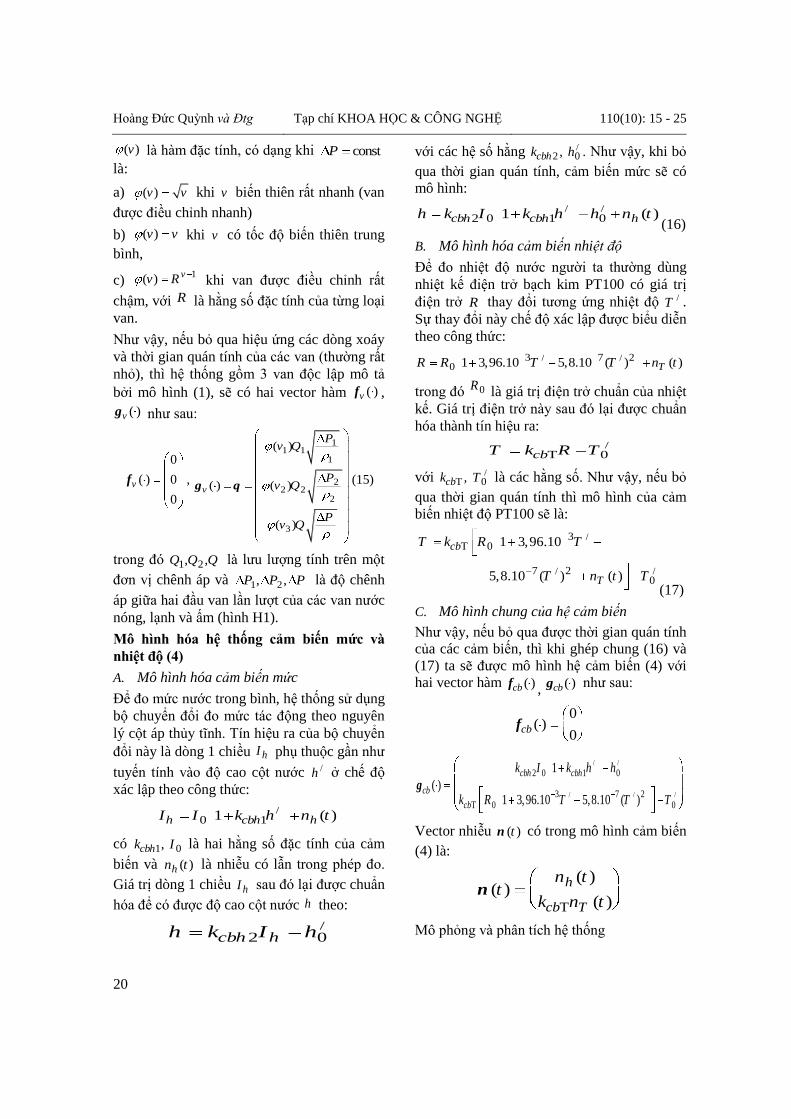
Hình 4 mô tả cấu trúc một van lƣu lƣợng
đƣợc điều khiển bằng khí nén (pneumatic
control valve). Tín hiệu đầu vào của van là áp
lực khí 0,2 1,4 [ ]atm , đƣợc chuẩn hóa thành
độ mở van [0,1]v . Tín hiệu đầu ra là lƣu
lƣợng dòng nƣớc 3 [ / ]q m s .
Hình 4. Cấu trúc bên trong của van lưu lượng
Theo [2],[3] thì khi bỏ qua các hiệu ứng dòng
xoáy trong chất lỏng chảy qua van, giữa tín
hiệu vào v và ra q của van sẽ có quan hệ tĩnh
ở chế độ xác lập nhƣ sau:
( )P
q v Q (14)
trong đó:
P là độ chênh áp giữa hai đầu van,
Q là lƣu lƣợng tính trên một đơn vị chênh áp
là khối lƣợng riêng của chất lỏng
R
1 2
3 4
5
6
Hoàng Đức Quỳnh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 15 - 25
20
( )v là hàm đặc tính, có dạng khi constP
là:
a) ( )v v khi v biến thiên rất nhanh (van
đƣợc điều chỉnh nhanh)
b) ( )v v khi v có tốc độ biến thiên trung
bình,
c) 1( ) vv R khi van đƣợc điều chỉnh rất
chậm, với R là hằng số đặc tính của từng loại
van.
Nhƣ vậy, nếu bỏ qua hiệu ứng các dòng xoáy
và thời gian quán tính của các van (thƣờng rất
nhỏ), thì hệ thống gồm 3 van độc lập mô tả
bởi mô hình (1), sẽ có hai vector hàm ( )vf ,
( )vg nhƣ sau:
0
( ) 0
0
vf ,
11 1
1
22 2
2
3
( )
( ) ( )
( )
v
Pv Q
Pv Q
Pv Q
g q(15)
trong đó 1 2, ,Q Q Q là lƣu lƣợng tính trên một
đơn vị chênh áp và 1 2, ,P P P là độ chênh
áp giữa hai đầu van lần lƣợt của các van nƣớc
nóng, lạnh và ấm (hình H1).
Mô hình hóa hệ thống cảm biến mức và
nhiệt độ (4)
A. Mô hình hóa cảm biến mức
Để đo mức nƣớc trong bình, hệ thống sử dụng
bộ chuyển đổi đo mức tác động theo nguyên
lý cột áp thủy tĩnh. Tín hiệu ra của bộ chuyển
đổi này là dòng 1 chiều hI phụ thuộc gần nhƣ
tuyến tính vào độ cao cột nƣớc /h ở chế độ
xác lập theo công thức:
/0 11 ( )h cbh hI I k h n t
có 1 0, cbhk I là hai hằng số đặc tính của cảm
biến và ( )hn t là nhiễu có lẫn trong phép đo.
Giá trị dòng 1 chiều hI sau đó lại đƣợc chuẩn
hóa để có đƣợc độ cao cột nƣớc h theo:
/2 0cbh hh k I h
với các hệ số hằng /2 0, cbhk h . Nhƣ vậy, khi bỏ
qua thời gian quán tính, cảm biến mức sẽ có
mô hình:
/ /2 0 1 01 ( )cbh cbh hh k I k h h n t
(16)
B. Mô hình hóa cảm biến nhiệt độ
Để đo nhiệt độ nƣớc ngƣời ta thƣờng dùng
nhiệt kế điện trở bạch kim PT100 có giá trị
điện trở R thay đổi tƣơng ứng nhiệt độ /T .
Sự thay đổi này chế độ xác lập đƣợc biểu diễn
theo công thức:
/ /3 7 20 1 3,96.10 5,8.10 ( ) ( )TR R T T n t
trong đó 0R là giá trị điện trở chuẩn của nhiệt
kế. Giá trị điện trở này sau đó lại đƣợc chuẩn
hóa thành tín hiệu ra:
/T 0cbT k R T
với /T 0, cbk T là các hằng số. Nhƣ vậy, nếu bỏ
qua thời gian quán tính thì mô hình của cảm
biến nhiệt độ PT100 sẽ là:
/
/ /
3T 0
7 20
1 3,96.10
5,8.10 ( ) ( )
cb
T
T k R T
T n t T(17)
C. Mô hình chung của hệ cảm biến
Nhƣ vậy, nếu bỏ qua đƣợc thời gian quán tính
của các cảm biến, thì khi ghép chung (16) và
(17) ta sẽ đƣợc mô hình hệ cảm biến (4) với
hai vector hàm ( )cbf , ( )cbg nhƣ sau:
0( )
0cbf
/ /
/ / /
2 0 1 0
3 7 2T 0 0
1
( )1 3,96.10 5,8.10 ( )
cbh cbh
cb
cb
k I k h h
k R T T Tg
Vector nhiễu ( )tn có trong mô hình cảm biến
(4) là:
T
( )( )
( )
h
cb T
n tt
k n tn
Mô phỏng và phân tích hệ thống

Hoàng Đức Quỳnh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 15 - 25
21
Mô hình phi tuyến của bàn thí nghiệm mức-
nhiệt độ
Tiếp theo ta sẽ cụ thể hóa mô hình toán hệ
thống điều khiển mức-nhiệt độ đã trình bày ở
trên cho bàn thí nghiệm có tại bộ môn Điều
khiển tự động, trƣờng ĐHBK Hà nội. Việc cụ
thể hóa này sẽ đƣợc thực hiện thông qua đơn
giản hóa mô hình nhờ bổ sung thêm một số
giả thiết chấp nhận đƣợc, cũng nhƣ thực
nghiệm xác định các tham số của mô hình.
Trƣớc tiên, các giả thiết đƣợc bổ sung thêm
bao gồm:
Hằng số thời gian quán tính của bộ chuyển
đổi /I P là bỏ qua đƣợc. Khi đó, nếu cả 3 bộ
chuyển đối /I P là giống nhƣ nhau, tức là có
1 2 3cd cd cd cdk k k k , thì với các hàm (13),
mô hình (2) của bộ chuyển đổi trở thành:
1
2 3
3
4
4
4
cd
cd cd
cd
k I
k I k
k I
)
)
)v uI
(18)
trong đó 3I là ký hiệu của ma trận đơn vị
3 3.
Tƣơng tự, khi bỏ qua các hằng số thời gian
quán tính của các van, cũng nhƣ độ chênh áp
ở cả ba van là không đổi, tốc độ điều chỉnh
van là trung bình, khối lƣợng riêng của các
dòng nƣớc nóng, lạnh và ấm thay đổi không
đáng kể (theo nhiệt độ), thì từ (15) ta có:
( )v 0f ,
1 1
2 2
3 3
( )
v
v v
v
k v
k v
k v
g q
(19)
Thêm nữa, nếu cả 3 van đƣợc sử dụng trong
hệ là hoàn toàn giống nhau thì do còn có
1 2 3v v v vk k k k , mô hình (19) của hệ van
trở thành: 3vkq vI (20)
với 3I là ma trận đơn vị 3 3.
Cũng nhƣ vậy, khi bỏ qua thời gian quán
tính của cảm biến và thành phần bậc cao
/7 25,8.10 ( )T trong (17), thì với việc chọn
các hằng số chuẩn hóa:
/
/
2 0 0 2 0 1
3
0 T 0
, 1
10
3,96
cbh cbh cbh
cb
k I h k I k
T k R
mô hình (4) của hệ cảm biến sẽ trở thành:
//
/( ) ( )
h ht t
T Ty n y n
(21)
Các giá trị khối lƣợng riêng 1 2, , và
nhiệt dung riêng 1 2, , C C C là không đổi,
cũng nhƣ nhiệt độ nƣớc nóng, lạnh 1 2, T T là
đã biết. Với những giả thiết đó, mô hình (10)
của bình trộn nƣớc ấm trở thành:
/
/ /
/
/
1 1 2 2 3 3
1 1 1 2 2 2
b b b
b b
k q k q k qhd
a k T q a k T qdt T
h (22)
trong đó: 1 2
1 2 31
, , b b bk k kS S S
là những hằng số và
1 1 1 2 2 21 2,
C T C Ta a
SC SC
là hai tham số xác định đƣợc.
Nhƣ vậy, sau khi có thêm các giả thiết nêu
trên, thì từ những mô hình (18), (20), (21),
(22) ta thu đƣợc mô hình trạng thái phi tuyến
cho toàn bộ bàn thí nghiệm hệ điều khiển
mức-nhiệt độ nhƣ sau:
/ /
/ /
1 2 3
1 1 2 2( ) ( )0
( )
b b
k k k
k a k T k a k T
h h
t
)&x u
y x n (23)
trong đó
/
/
h
Tx
,
h
Ty
,
1
2
3
4
4
4
)
))
)
I
I
I
u u
Hoàng Đức Quỳnh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 15 - 25
22
Và 1 1 2 2
3 3
, ,
,
cd v b cd v b
cd v b cd v
k k k k k k k k
k k k k k k k
là các hằng số có thể xác định đƣợc bằng lý
thuyết hoặc bằng thực nghiệm thông qua đo
đạc các tín hiệu vào ra.
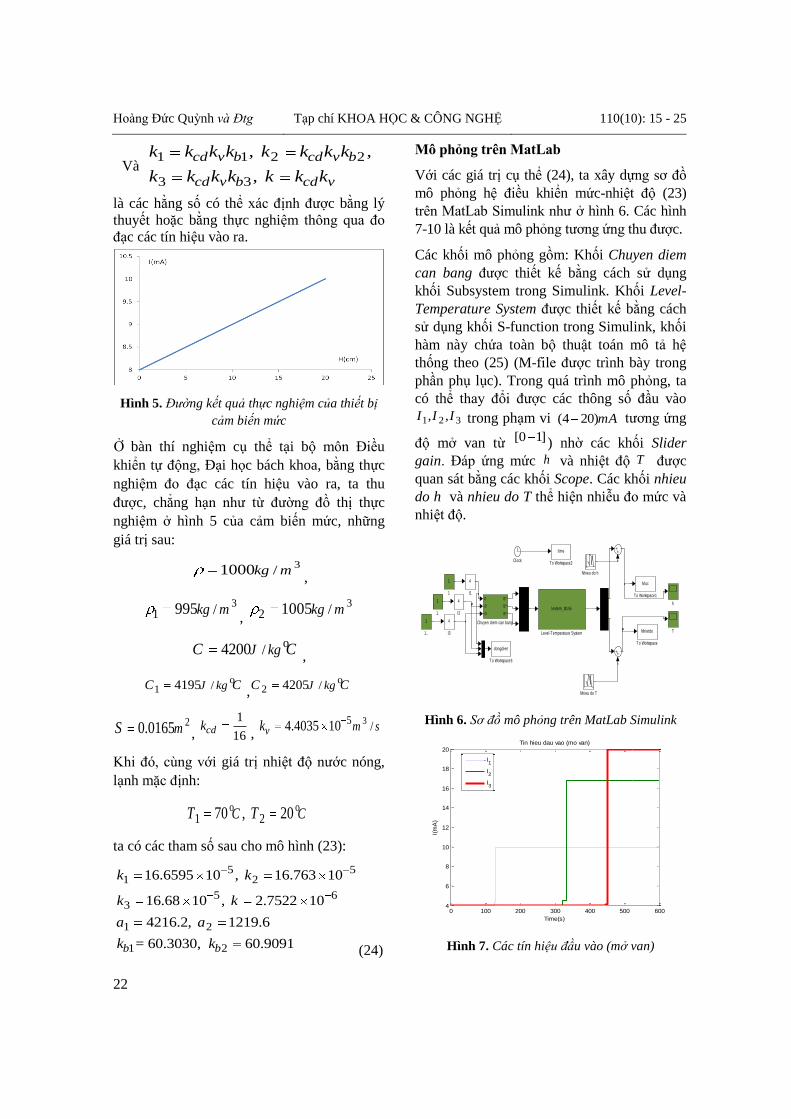
Hình 5. Đường kết quả thực nghiệm của thiết bị
cảm biến mức
Ở bàn thí nghiệm cụ thể tại bộ môn Điều
khiển tự động, Đại học bách khoa, bằng thực
nghiệm đo đạc các tín hiệu vào ra, ta thu
đƣợc, chẳng hạn nhƣ từ đƣờng đồ thị thực
nghiệm ở hình 5 của cảm biến mức, những
giá trị sau:
3/1000kg m
,
31 /995kg m
, 3
2 /1005kg m
/4200J kgC Co ,
1 /4195J kgC Co, 2 /4205J kgC Co
20.0165mS ,
1
16cdk
, 35
/4.4035 10v m sk
Khi đó, cùng với giá trị nhiệt độ nƣớc nóng,
lạnh mặc định:
1 270 , 20C CT To o
ta có các tham số sau cho mô hình (23):
5 51 2
5 63
1 2
1 2
16.6595 10 , 16.763 10
16.68 10 , 2.7522 10
4216.2, 1219.6
= 60.3030, 60.9091b b
k k
k k
a a
k k(24)
Mô phỏng trên MatLab
Với các giá trị cụ thể (24), ta xây dựng sơ đồ
mô phỏng hệ điều khiển mức-nhiệt độ (23)
trên MatLab Simulink nhƣ ở hình 6. Các hình
7-10 là kết quả mô phỏng tƣơng ứng thu đƣợc.
Các khối mô phỏng gồm: Khối Chuyen diem
can bang đƣợc thiết kế bằng cách sử dụng
khối Subsystem trong Simulink. Khối Level-
Temperature System đƣợc thiết kế bằng cách
sử dụng khối S-function trong Simulink, khối
hàm này chứa toàn bộ thuật toán mô tả hệ
thống theo (25) (M-file đƣợc trình bày trong
phần phụ lục). Trong quá trình mô phỏng, ta
có thể thay đổi đƣợc các thông số đầu vào
1 2 3, ,I I I trong phạm vi (4 20)mA tƣơng ứng
độ mở van từ [0 1] ) nhờ các khối Slider
gain. Đáp ứng mức h và nhiệt độ T đƣợc
quan sát bằng các khối Scope. Các khối nhieu
do h và nhieu do T thể hiện nhiễu đo mức và
nhiệt độ.
h
dongdien
To Workspace3
time
To Workspace2
Muc
To Workspace1
Nhietdo
To Workspace
T
Nhieu do h
Nhieu do T
levtem_sfcn5
Level-Temperature System
4
I3
4
I2
4
I1
Clock
I1
I2
I3
I1^
I2^
I3^
Chuyen diem can bang1
1..
1
1.
1
1
Hình 6. Sơ đồ mô phỏng trên MatLab Simulink
0 100 200 300 400 500 6004
6
8
10
12
14
16
18
20
Time(s)
I(m
A)
Tin hieu dau vao (mo van)
I1
I2
I3
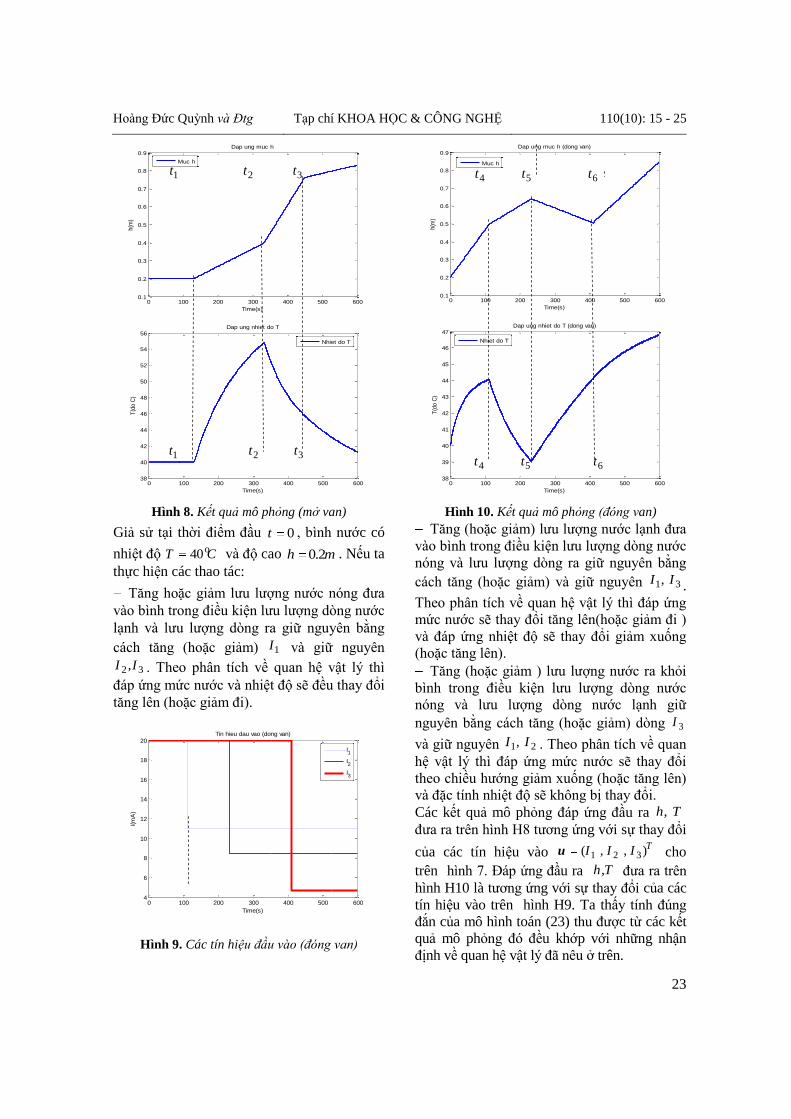
Hình 7. Các tín hiệu đầu vào (mở van)
Hoàng Đức Quỳnh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 15 - 25
23
0 100 200 300 400 500 6000.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9Dap ung muc h
Time(s)
h(m
)
Muc h
0 100 200 300 400 500 60038
40
42
44
46
48
50
52
54
56Dap ung nhiet do T
Time(s)
T(d
o C
)
Nhiet do T
Hình 8. Kết quả mô phỏng (mở van)
Giả sử tại thời điểm đầu 0t , bình nƣớc có
nhiệt độ 40T Co và độ cao 0.2h m . Nếu ta
thực hiện các thao tác:
Tăng hoặc giảm lƣu lƣợng nƣớc nóng đƣa
vào bình trong điều kiện lƣu lƣợng dòng nƣớc
lạnh và lƣu lƣợng dòng ra giữ nguyên bằng
cách tăng (hoặc giảm) 1I và giữ nguyên
2 3,I I . Theo phân tích về quan hệ vật lý thì
đáp ứng mức nƣớc và nhiệt độ sẽ đều thay đổi
tăng lên (hoặc giảm đi).
0 100 200 300 400 500 6004
6
8
10
12
14
16
18
20Tin hieu dau vao (dong van)
Time(s)
I(m
A)
I1
I2
I3
Hình 9. Các tín hiệu đầu vào (đóng van)
0 100 200 300 400 500 6000.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9Dap ung muc h (dong van)
Time(s)
h(m
)
Muc h
0 100 200 300 400 500 60038
39
40
41
42
43
44
45
46
47Dap ung nhiet do T (dong van)
Time(s)
T(d
o C
)
Nhiet do T
Hình 10. Kết quả mô phỏng (đóng van)
Tăng (hoặc giảm) lƣu lƣợng nƣớc lạnh đƣa
vào bình trong điều kiện lƣu lƣợng dòng nƣớc
nóng và lƣu lƣợng dòng ra giữ nguyên bằng
cách tăng (hoặc giảm) và giữ nguyên 1 3, I I .
Theo phân tích về quan hệ vật lý thì đáp ứng
mức nƣớc sẽ thay đổi tăng lên(hoặc giảm đi )
và đáp ứng nhiệt độ sẽ thay đổi giảm xuống
(hoặc tăng lên).
Tăng (hoặc giảm ) lƣu lƣợng nƣớc ra khỏi
bình trong điều kiện lƣu lƣợng dòng nƣớc
nóng và lƣu lƣợng dòng nƣớc lạnh giữ
nguyên bằng cách tăng (hoặc giảm) dòng 3I
và giữ nguyên 1 2, I I . Theo phân tích về quan
hệ vật lý thì đáp ứng mức nƣớc sẽ thay đổi
theo chiều hƣớng giảm xuống (hoặc tăng lên)
và đặc tính nhiệt độ sẽ không bị thay đổi.
Các kết quả mô phỏng đáp ứng đầu ra , h T
đƣa ra trên hình H8 tƣơng ứng với sự thay đổi
của các tín hiệu vào 1 2 3( , , )TI I Iu cho
trên hình 7. Đáp ứng đầu ra ,h T đƣa ra trên
hình H10 là tƣơng ứng với sự thay đổi của các
tín hiệu vào trên hình H9. Ta thấy tính đúng
đắn của mô hình toán (23) thu đƣợc từ các kết
quả mô phỏng đó đều khớp với những nhận
định về quan hệ vật lý đã nêu ở trên.
4t 5t 6t
4t 5t 6t
1t 2t 3t
1t 2t 3t

Hoàng Đức Quỳnh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 15 - 25
24
Đánh giá chất lƣợng mô hình và phân tích
hệ thống
Các kết quả mô phỏng cho thấy, các quan hệ
vật lý của mô hình đều đúng khi ta thực hiện
mô phỏng.
Trong hình H8, ở thời điểm 1t khi ta tăng lƣu
lƣợng nƣớc nóng đƣa vào bình bằng cách
tăng tín hiệu vào 1I , quan sát kết quả cho
thấy mức h tăng lên một cách tuyến tính còn
nhiệt độ T tăng lên một cách phi tuyến. Ở
thời điểm tiếp theo 2t , ta tăng lƣu lƣợng nƣớc
lạnh đƣa vào bình bằng cách tăng tín hiệu vào
2I , quan sát kết quả cho thấy, mức h vẫn
tăng lên một cách tuyến tính còn nhiệt độ T
giảm xuống một cách phi tuyến. Ở thời điểm
3t , ta tăng lƣu lƣợng nƣớc ra khỏi bình bằng
cách tăng tín hiệu vào 3I , quan sát kết quả
cho thấy, mức h giảm xuống còn đặc tính
nhiệt độ T không bị thay đổi độ dốc.
Trong hình H10, ở thời điểm đầu 4t , khi ta
giảm lƣu lƣợng nƣớc nóng đƣa vào bình bằng
cách giảm tín hiệu vào 1I , quan sát kết quả
cho thấy độ dốc của đáp ứng mức h giảm
xuống còn nhiệt độ T giảm xuống một cách
phi tuyến. Ở thời điểm tiếp theo 5t , ta giảm
lƣu lƣợng nƣớc lạnh đƣa vào bình bằng cách
giảm tín hiệu vào 2I , quan sát kết quả cho
thấy, mức h giảm xuống còn nhiệt độ T thì
tăng lên phi tuyến. Ở thời điểm 6t , ta giảm
lƣu lƣợng nƣớc ra khỏi bình bằng cách giảm
tín hiệu vào 3I , quan sát kết quả cho thấy,
mức h tăng lên còn đặc tính của nhiệt độ T
không bị thay đổi.
Tƣơng tự nhƣ vậy, khi ta tiến hành thay đổi
độ tăng giảm các giá trị tín hiệu điện đƣa vào
(tăng giảm độ mở van, lƣu lƣợng) thì độ dốc
và chiều của đồ thị các đáp ứng đều thay đổi
theo đúng nhƣ quan hệ vật lý giữa chúng. Các
kết quả mô phỏng cho thấy tính đúng đắn của
mô hình phi tuyến đã xây dựng.
KẾT LUẬN
Bài báo đã đi tiến mô hình hóa hệ thống điều
khiển mức-nhiệt độ. Đây đƣợc xem là hệ
chung cho lớp các hệ khuấy trộn liên tục. Từ
mô hình phi tuyến thu đƣợc, bài báo đã phân
tích và đánh giá chất lƣợng hệ thống.
Với số các giả thiết cần đƣợc sử dụng trong
quá trình mô hình hóa là ít nhất tới mức có
thể, mô hình toán cho hệ thống điều khiển
mức-nhiệt độ đã xây dựng đƣợc ở mức độ tổng
quát tối đa, trong đó chứa đựng đƣợc cả những
ảnh hƣởng động học của thiết bị chấp hành,
cảm biến tới chất lƣợng hệ thống. Các kết quả
mô phỏng trên MatLab đã kiểm chứng sự đúng
đắn của mô hình đƣợc xây dựng.
Việc mô hình hóa đƣợc bài báo hệ thống một
cách đủ chính xác sẽ giúp chúng ta sử dụng
đƣợc hiệu quả các phƣơng pháp điều khiển
mới, hiện đại, cho việc điều khiển quá trình
mức-nhiệt độ, từ đó nâng cao đƣợc chất lƣợng
điều khiển trong thực tế sản xuất.
TÀI LIỆU THAM KHẢO
[1]. Bela G. Liptak (Chief Editor), 1995. Process
Measurement and Analysis - Handbook.
Pennsylvania Chilton Book Company, 3. Edition.
[2]. Byron Bird; Warren Steward and Edwin
Lichtfoot, 1960. Transport phenomena. John
Wieley&Sons.
[3]. Hoàng Minh Sơn, 2009. Cơ sở hệ thống điều
khiển quá trình. NXB Bách Khoa Hà Nội.
[4]. Seborg Dale E., Edgar Thomas F. and
Mellichamp Ducan A., 2004. Process Dynamic
and Control. John Wiley&Sons Inc.
Hoàng Đức Quỳnh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 15 - 25
25
SUMMARY
NONLINEAR MODELLING OF LEVEL-TEMPERATURE
CONTROL SYSTEM AND ANALYSIS OF SYSTEM
Hoang Duc Quynh
*1, Nguyen Doan Phuoc
2
1Industrial Economic Technology College; 2Hanoi University of Science and Technology
The technological requirement, that both temperature and level are controlled simultaneously, is
founded in many industrial fields. This paper presents the method for nonlinear modelling of level-
temperature control system, from there the simulation and analysis of system is executed. The
presented nonlinear model of system will play a fundamental role for new controller design to
improving system performance.
Keywords: Modelling, Process Control, Level – Temperature control system.
PHỤ LỤC
Chƣơng trình MatLab cho khối S-function Level-Temperature System function [sys,y0]=levtem_sfcn1(t,y,u,flag)
S=0.0165;
T1=70;
T2=20;
kv=4.4035e-5;
ro=1000;
ro1=995;
ro2=1005;
C=4200;
C1=4195;
C2=4205;
kcd=1/16;
kb1=ro1/(ro*S);
kb2=ro2/(ro*S);
kb3=1/S;
a1=C1*T1*ro1/(ro*S*C);
a2=C2*T2*ro2/(ro*S*C);
k1=kcd*kv*kb1;
k2=kcd*kv*kb2;
k3=kcd*kv*kb3;
k=kcd*kv;
if flag == 1,
I1=u(1);
I2=u(2);
I3=u(3);
sys(1)=(k1*I1+k2*I2-k3*I3);
sys(2)=kcd*kv*((a1-kb1*y(2))*I1+(a2- kb2*y(2))*I2)/y(1);
elseif flag == 0,
sys=[2;0;2;3;0;1];
y0=[0.2;40];
elseif flag == 3,
sys=[y(1) y(2)];
else
sys=[];
end
Ngày nhận bài: 09/9/2013; Ngày phản biện:08/10/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: TS. Đỗ Trung Hải – Trường ĐH Kỹ thuật Công nghiệp - ĐHTN
* Email: [email protected]

Hoàng Đức Quỳnh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 15 - 25
26

Nguyễn Thị Việt Hƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 27 - 36
27
MÔ HÌNH HÓA VÀ MÔ PHỎNG CÓ SỬ DỤNG BỘ QUAN SÁT TRẠNG THÁI
TRONG HỆ CẦN CẨU TREO
Nguyễn Thị Việt Hƣơng
1,*, Đào Phƣơng Nam
2, Nguyễn Doãn Phƣớc
2
1Trường CĐ Công nghiệp Thái Nguyên, 2Đại học Bách khoa Hà Nội
TÓM TẮT Để có thể nâng cao đƣợc chất lƣợng điều khiển cần cẩu treo, cần thiết phải có mô hình toán đủ
chính xác mô tả nó. Bài báo này trình bày mô hình phi tuyến các loại cẩu treo khác nhau, từ 2D tới
3D và từ loại đơn giản có 1 tín hiệu vào đến loại có nhiều tín hiệu vào. Những mô hình cẩu treo
của bài báo đều đƣợc chuẩn hóa chung các biến trạng thái, giúp cho chúng có đƣợc tính thống nhất
trong áp dụng các phƣơng pháp điều khiển sau này. Ngoài ra sự phù hợp của mô hình đã đƣợc
kiểm chứng thông qua các kết quả mô phỏng có kết hợp sử dụng khâu quan sát trạng thái.
Từ khóa: Cẩu treo, Cẩu giàn, Khâu quan sát, Phương trình Euler-Lagrange, Hệ thiếu cơ cấu
chấp hành.
ĐẶT VẤN ĐỀ*
So với nhiều chủng loại cần cẩu khác nhau
nhƣ cẩu tháp (tower/rotary crane), cẩu cánh
tay đòn (boom crane)... thì cẩu treo
(gantry/overhead crane) là loại đƣợc sử dụng
rất phổ biến trong công nghiệp. Nó đƣợc dùng
để vận chuyển, bốc dỡ hàng tại các bến cảng,
nhà kho. Cẩu treo có nhiều dạng khác nhau,
từ đơn giản đến phức tạp. Hình 1 là loại cẩu
treo giàn, loại gặp khá nhiều tại các bến cảng.
Hình 1. Cẩu treo/cẩu giàn
Nó gồm một xe cẩu chạy đƣợc theo hai chiều
trực giao với nhau trong mặt phẳng ( , )x y .
Lực đẩy đƣợc tạo bởi hai động cơ đẩy độc lập
với nhau. Trên xe cẩu còn có một động cơ thứ
ba là động cơ dùng để tạo moment quấn tời,
điều chỉnh độ dài dây buộc hàng phía dƣới.
Loại cẩu treo đơn giản hơn đƣợc hiểu là loại
mà xe cẩu hàng chỉ chạy theo một chiều nằm
* Tel: 0914609992; Email: [email protected]
ngang ( x hoặc y ) bởi một động cơ đẩy. Tất
nhiên tính linh hoạt trong bốc dỡ, vận chuyển
hàng của loại cẩu treo này là kém hơn, song
lại tiện ích hơn về nhiều mặt ở những môi
trƣờng hẹp, có chiều vận chuyển hàng cố định
theo một phƣơng, chẳng hạn nhƣ ở các dây
chuyền sản xuất trong nhà máy, vị trí chuyển
đổi hàng giữa các băng tải trong nhà kho....
Tất cả các loại cẩu treo trên đều có tên gọi
chung là gantry crane (cẩu giàn) hay
overhead crane (cẩu treo).
Mặc dù đã xuất hiện từ khá lâu và đƣợc dùng
rất nhiều trong công nghiệp [1], song vấn đề
điều khiển cần cẩu treo, cải tiến chất lƣợng
vẫn chuyển, bốc dỡ hàng, định hƣớng nhanh,
an toàn và chính xác, tiết kiệm năng lƣợng, vẫn
là bài toán thời sự, cho kể cả tới ngày hôm nay.
Hàng năm vẫn có nhiều lời giải cho bài toán
điều khiển cầu treo đƣợc công bố, tuy vậy tính
thích nghi, tính bền vững của những lời giải
này là rất hạn chế và ta hoàn toàn có thể khẳng
định rằng còn lâu nữa mới có thể có đƣợc lời
giải hoàn thiện cuối cùng đáp ứng đƣợc mọi
yêu cầu chất lƣợng điều khiển đặt ra của bài
toán điều khiển cần cẩu treo.
Giống nhƣ mọi bài toán điều khiển khác, để
phân tích đƣợc chất lƣợng hệ thống và thiết
kế đƣợc bộ điều khiển cho cần cẩu treo, ta cần
phải có mô hình toán của nó. Ứng với mỗi
loại cẩu treo lại có nhiều mô hình toán khác
nhau mô tả nó, trong đó thƣờng sử dụng nhất
vẫn là hai loại: mô hình trạng thái và mô hình
Nguyễn Thị Việt Hƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 27 - 36
28
biến khớp Euler-Lagrange. Với mỗi loại mô
hình sẽ có các phƣơng pháp phân tích và thiết
kế bộ điều khiển thích hợp khác nhau.
Trong khi số lƣợng các phƣơng pháp ứng với
mô hình trạng thái là khá phong phú, trải khắp
các yêu cầu về chất lƣợng điều khiển khác
nhau, kích thƣớc bộ điều khiển thu đƣợc lại
khá lớn, thì với mô hình Euler-Lagrange, các
phƣơng pháp phân tích và điều khiển thƣờng
gọn hơn, nhƣng lại chủ yếu tập trung cho lớp
hệ đủ cơ cấu chấp hành.
Riêng với hệ cẩu treo, mặc dù là hệ Euler-
Lagrange thiếu cơ cấu chấp hành, song ta vẫn
có thể chuyển về bài toán phân tích và điều
khiển hệ con, đủ cơ cấu chấp hành trong nó
[2],[4],[5], nên có thể nói dạng mô hình
Euler-Lagrange ở đối tƣợng cần cẩu treo có
ƣu thế hơn. Bởi vậy bài báo này sẽ tập trung
chủ yếu vào việc xây dựng mô hình Euler-
Lagrange, mô phỏng và đánh giá chất lƣợng
của mô hình, cho hệ cần cẩu treo.
Cho tới nay cũng đã có nhiều công bố về kết
quả mô hình hóa dạng Euler-Lagrange cho hệ
cẩu treo dƣới nhiều hình thức khác nhau,
chẳng hạn nhƣ ở [9],[12] là mô hình 2 chiều
một đầu vào, xấp xỉ tuyến tính, ở [7],[8] là mô
hình 3 chiều 2 đầu vào, ở [4] là mô hình 3
chiều 3 đầu vào .... Tuy nhiên, tất cả các dạng
mô hình Euler-Lagrange đó lại không thống
nhất với nhau ở việc chọn các biến trạng thái
trong hệ cũng nhƣ các giả thiết kèm theo cho
việc xây dựng mô hình. Do đó mặc dù chúng
có thể là tƣơng đƣơng, song việc chuyển đổi
từ dạng này sang dạng mô hình khác sẽ gặp
khá nhiều khó khăn. Điều này kéo theo hệ quả
là những phƣơng pháp phân tích và điều
khiển sau này, một khi đƣợc xây dựng cho
dạng mô hình nào, thì chỉ có thể ứng dụng
đƣợc đúng cho mô hình đó.
Vì vậy ở bài báo này, chúng tôi đã đặt ra
nhiệm vụ là phải xây dựng mô hình Euler-
Lagrange cho các loại cẩu treo, có thể khác
nhau về số chiều chuyển động của cẩu hay số
các tín hiệu đầu vào, song luôn nhất quán và
thống nhất với nhau về các biến trạng thái độc
lập quy định trong hệ cũng nhƣ những giả
thiết đƣợc sử dụng trong quá trình xây dựng
mô hình.
Khi xây dựng các mô hình thì chúng tôi đã giả
thiết các hệ thống dây buộc hàng đều có thể
thay bằng một dây cứng, không trọng lƣợng.
Nhƣ [15] đã cho thấy tầm quan trọng của việc
sử dụng khâu Quan sát trạng thái trong hệ
thống cơ có xét đến ảnh hƣởng của thành
phần ma sát thể hiện ở những lý do sau đây:
Khâu Quan sát tuyến tính không có khả
năng thể hiện đầy đủ những đặc điểm vốn có
của mỗi hệ thống.
Khâu Quan sát tựa mô hình chỉ thích hợp
với những trƣờng hợp mô hình đƣợc xác định
chính xác.
Khâu vi phân high-gain sẽ không cho kết
quả chính xác tại những vị trí “peak” vì khiến
cho giá trị có khả năng đi tới vô cùng.
Cũng theo [15], khâu quan sát trƣợt có phạm
vi sử dụng rộng rãi, cho phép đạt đƣợc sự hội
tụ với thời gian hữu hạn, tính bền vững khi có
tác động bởi những thành phần bất định và
khả năng ƣớc lƣợng các thành phần bất định.
Bộ quan sát tiệm cận cho hệ thống khi xét đến
thành phần ma sát đã đƣợc nghiên cứu bởi
Orlov, … dựa vào chế độ trƣợt bậc 2 và về lý
luận cũng đƣợc đảm bảo do thỏa mãn nguyên
lý Tách. Bộ điều khiển vi phân bền vững với
đặc điểm hội tụ trong khoảng thời gian hữu
hạn dựa trên thuật toán super – twisting cũng
đã đƣợc nghiên cứu và ứng dụng thành công
bởi Pisano, Bartoliny,…, tiếp đến Furuta đã
mở rộng cho ứng dụng hệ truyền thẳng, mà
không phụ thuộc nhiều vào mô hình hệ thống.
Đối với mỗi mô hình thì tham số hệ thống
cũng nhƣ thành phần bất định có thể đƣợc
ƣớc lƣợng (đây là đặc điểm chung của những
hệ thống cơ có xét đến ảnh hƣởng của ma sát
Coulomb), và đó là lý do dẫn đến những quan
sát các thành phần của hệ thống. [15] đã đề
xuất khâu quan sát cho phép xác định tốc độ
từ vị trí đƣợc đo về, sử dụng những biến thể
của thuật toán “super – twisting” trong chế độ
trƣợt bậc 2 và nguyên lý tách đƣợc khẳng
định. Bài báo đã kiểm chứng khả năng làm
việc của mô hình cẩu treo với sự bổ sung
khâu quan sát trạng thái nhƣ mô tả trong [15].

Nguyễn Thị Việt Hƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 27 - 36
29
MÔ HÌNH CẨU TREO CHUYỂN ĐỘNG
THEO MỘT PHƢƠNG NẰM NGANG
Hình 2 là sơ đồ mô tả cấu trúc cơ khí của hệ
cẩu treo chuyển động theo một phƣơng nằm
ngang duy nhất.
Hình 2. Mô hình 2D một phương
Hệ gồm có xe cẩu với khối lƣợng cm chạy
trên một xà đỡ nằm ngang. Lực đẩy ( )u t cho
xe cẩu đƣợc lấy từ động cơ, giữ vai trò nhƣ
một cơ cấu chấp hành. Dƣới xe đẩy có một tời
quay chỉnh độ dài l của dây cáp buộc hàng.
Hàng đƣợc nối với xe cẩu ở đầu dây cáp có
khối lƣợng là hm . Khi có lực đẩy u tác động
vào xe cẩu, xe sẽ chạy trên xà đỡ nằm ngang
một quãng đƣờng là x và dƣới tác động của
lực quán tính trong quá trình chuyển động,
hàng buộc ở đầu dây sẽ dao động. Dao động
đó của hàng đƣợc biểu diễn bằng góc lắc
giữa dây buộc hàng và phƣơng thẳng đứng z .
Mô hình 2D một đầu vào
Mô hình 2D đƣợc hiểu là mô hình mô tả hệ
cẩu treo một phƣơng ở hình H1 khi mà dao
động của hàng hm chỉ nằm trong mặt phẳng
( , )x z . Tiếp theo, mô hình 2D một đầu vào
đƣợc hiểu là mô hình 2D của hệ khi chỉ có tác
động bởi lực 1( ) ( )u t u t vào xe đẩy, còn
không quan tâm tới sự thay đổi độ dài l của
dây treo hàng trong quá trình điều khiển. Nói
cách khác, l là hằng số trong suốt quá trình
điều khiển.
Sử dụng ký hiệu , h hx z về tọa độ của hàng
đƣợc chiếu lên trục x và z , ta có (hình 2):
sin
cos
h x
h
x x l x l
z l(26)
Ký hiệu tiếp J là moment quán tính của
hàng, ta sẽ có hàm mô tả động năng E và thế
năng V của hệ nhƣ sau:
2 2 2 2
2 2 2
1 1 1 1
2 2 2 2
1 1 1( ) ( ) cos
2 2 2
cos
c h h h h
c h h h
h h h
E m x m x m z J
m m x m l m x l J
V gm z gm l
&& & &
& & && &
Từ đây, hàm Lagrange L E V cho hệ sẽ
là:
2 2
2
1 1( , ) ( ) ( ) cos
2 2
1 cos
2
c h h h
h
L m m x m l m x l
J gm l
& && & &
&
q q
trong đó: ( , )Txq (27) là vector các biến
khớp trong hệ.
Áp dụng công thức động lực học Euler-
Lagrange [10]:
( , ) ( , )T T
d L L
dt
& &
&
q q q q
q q
(28)
trong đó: , L L
&q qlà ký hiệu đạo hàm Jacobi
của hàm nhiều biến, và vector tín hiệu điều
khiển: ( , 0)Tu
ta có:
2
2
2
( ) cos
cos
0
sin sin
( ) cos sin
cos sin ( )
0
sin sin
c h h
h h
h h
c h h h
h h h
h h
m m x m ld
dt m l m xl J
m x l gm l
m m x m l m l
m xl m x l m l J
m x l gm l
&&
& &&
&&
&& &&&
& &&&& &
&&
2
cos
cos
00 sin
sin0 0
h c h
h h
h
h
m m m l x
m l m l J
xm l
gm l
&&
&&
& &
&
xl
z
x l
hm
cm 1u u x

Nguyễn Thị Việt Hƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 27 - 36
30
Vậy khi sử dụng ký hiệu:
2
cos( )
cos
0 sin( , )
0 0
0( )
sin
h c h
h h
h
h
m m m l
m l m l J
m l
gm l
&&
M
C
q
q q
g q
thì phƣơng trình trên trở thành:
( ) ( , ) ( )0
u&& &&q q q q q g qM C
(29)
với hai ma trận ( )M q , ( , )&C q q thỏa mãn các
tính chất:
( ) ( ) 0TM Mq q(30)
( ) ( , ) ( , )T& & &M C Cq q q q q
(31)
Nói cách khác, hệ cẩu treo chuyển động theo
một phƣơng nằm ngang ở hình 1 là hệ Euler-
Lagrange có vector của hai biến khớp (27) và
một đầu vào, hay (29) là hệ hai bậc tự do và
thiếu cơ cấu chấp hành.
Mô hình 2D hai đầu vào
Xét lại hệ cẩu treo chuyển động theo một
phƣơng nằm ngang trên xà đỡ cố định mô tả ở
hình 2, nhƣng bây giờ có hai tín hiệu tác động
ở đầu vào là lực 1u u đẩy xe cẩu có khối
lƣợng cm trên xà đỡ ngang và lực 2u tạo ra
từ động cơ với khối lƣợng tm đặt ngay trên
xe cẩu để quấn tời buộc hàng.
Từ lực 2u tạo ra từ động cơ quấn tời độ dài l
của dây buộc hàng không còn là hằng số mà
thay vào đó nó trở thành một biến ( )l t của mô
hình giống nhƣ ( )x t và ( )t .
Nhƣ vậy, hệ cẩu treo ở hình H1 bây giờ là ba
bậc tự do có ba biến khớp:
( , , )Tx lq(32)
Lại sử dụng các ký hiệu (1) về tọa độ của
hàng chiếu lên trục x và z , thì hàm động
năng E và thế năng V của hệ khi độ dài dây
buộc hàng ( )l t thay đổi theo thời gian, ứng
với tổng khối lƣợng c tm m của xe và động
cơ quấn tời, sẽ là:
2 2
2
2
1 1( ) ( )
2 2
1 ( ) ( cos sin )
2
1
2
cos
c t h h t
h h
h h h
E m m m x m m l
m l m x l l
J
V gm z gm l
&&
& & &&
&
Suy ra, hệ có hàm Lagrange L E V :
2 2
2
2
1 1( , ) ( ) ( )
2 2
1 ( ) ( cos sin )
2
1 cos
2
c t h h t
h h
h
L m m m x m m l
m l m x l l
J gm l
&& &
& & &&
&
q q
Lại sử dụng công thức động lực học Euler-
Lagrange (28) giống nhƣ ở mục 2.1, nhƣng
với vector biến khớp (32) và vector tín hiệu
đầu vào: 1 2( , , 0)Tu u (33) ta sẽ có:
2
2
( cos sin )
( ) sin
cos
0
cos cos
( sin cos ) sin
( ) sin cos
c t h h
h t h
h h
h h h
h h
c t h h h
h
m m m x m l ld
m m l m xdt
m l m xl J
m l m x gm
m x l l gm l
m m m x m l m l
m x
& &&
& &
& &&
& &&
& &&
&& &&&&
&&
2
2
2
sin ( )
cos ( )
sin 2 cos
cos
2 sin
h t
h h
h h
h h
h h
m m l
m xl m l J
m l m l
m l m g
m ll m gl
&&
&&&&
& &&
&
&&
tức là có:
1
2( ) ( , ) ( )
0
u
u&& &&M Cq q q q q g q
(34)
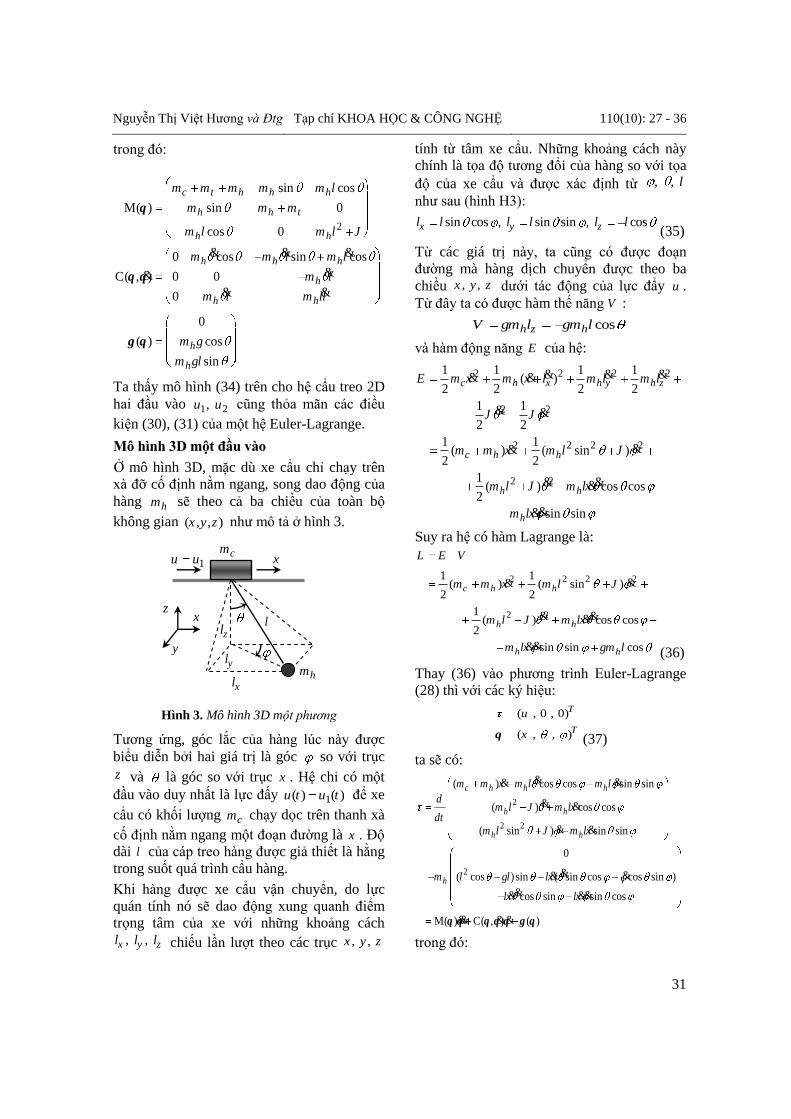
Nguyễn Thị Việt Hƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 27 - 36
31
trong đó:
2
sin cos
( ) sin 0
cos 0
0 cos sin cos
( , ) 0 0
0
0
( ) cos
sin
c t h h h
h h t
h h
h h h
h
h h
h
h
m m m m m l
m m m
m l m l J
m m l m l
m l
m l m ll
m g
m gl
& & &
&&
& &
M
C
q
q q
g q
Ta thấy mô hình (34) trên cho hệ cẩu treo 2D
hai đầu vào 1 2, u u cũng thỏa mãn các điều
kiện (30), (31) của một hệ Euler-Lagrange.
Mô hình 3D một đầu vào
Ở mô hình 3D, mặc dù xe cẩu chỉ chạy trên
xà đỡ cố định nằm ngang, song dao động của
hàng hm sẽ theo cả ba chiều của toàn bộ
không gian ( , , )x y z nhƣ mô tả ở hình 3.
Hình 3. Mô hình 3D một phương
Tƣơng ứng, góc lắc của hàng lúc này đƣợc
biểu diễn bởi hai giá trị là góc so với trục
z và là góc so với trục x . Hệ chỉ có một
đầu vào duy nhất là lực đấy 1( ) ( )u t u t để xe
cẩu có khối lƣợng cm chạy dọc trên thanh xà
cố định nằm ngang một đoạn đƣờng là x . Độ
dài l của cáp treo hàng đƣợc giả thiết là hằng
trong suốt quá trình cẩu hàng.
Khi hàng đƣợc xe cẩu vận chuyển, do lực
quán tính nó sẽ dao động xung quanh điểm
trọng tâm của xe với những khoảng cách , , x y zl l l chiếu lần lƣợt theo các trục , , x y z
tính từ tâm xe cẩu. Những khoảng cách này
chính là tọa độ tƣơng đổi của hàng so với tọa
độ của xe cẩu và đƣợc xác định từ , , l
nhƣ sau (hình H3):
sin cos , sin sin , cosx y zl l l l l l(35)
Từ các giá trị này, ta cũng có đƣợc đoạn
đƣờng mà hàng dịch chuyển đƣợc theo ba
chiều , , x y z dƣới tác động của lực đẩy u .
Từ đây ta có đƣợc hàm thế năng V :
cosh z hV gm l gm l
và hàm động năng E của hệ:
2 2 2 2
2 2
2 2 2 2
2 2
1 1 1 1( )
2 2 2 2
1 1
2 2
1 1( ) ( sin )
2 2
1 ( ) cos cos
2
sin sin
c h x h y h z
c h h
h h
h
E m x m x l m l m l
J J
m m x m l J
m l J m lx
m lx
& & && &
& &
&&
& &&
&&
Suy ra hệ có hàm Lagrange là:
2 2 2 2
2 2
1 1( ) ( sin )
2 2
1 ( ) cos cos
2
sin sin cos
c h h
h h
h h
L E V
m m x m l J
m l J m lx
m lx gm l
&&
& &&
&&(36)
Thay (36) vào phƣơng trình Euler-Lagrange
(28) thì với các ký hiệu:
( , 0 , 0)
( , , )
T
T
u
xq (37)
ta sẽ có:
2
2 2
2
( ) cos cos sin sin
( ) cos cos
( sin ) sin sin
0
( cos ) sin ( sin cos cos sin )
cos sin sin cos
( )
c h h h
h h
h h
h
m m x m l m l
dm l J m lx
dtm l J m lx
m l gl lx
lx lx
& &&
& &
& &
& &&
& && &
&&q qM ( , ) ( )&&q q q g qC
trong đó:
zl
yl
1u u x
l
hm
cm
x
y
z
xl
Nguyễn Thị Việt Hƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 27 - 36
32
2
2 2
2
cos cos sin sin
( ) cos cos 0
sin sin 0 sin
0 sin cos cos sin
( , ) 0 0
0 sin cos
cos sin s
c h h h
h h
h h
h h
h
h h
m m m l m l
m l m l J
m l m l J
m l m l
m l
m l m l
& &
&
&
& &
q
q q
M
C
2
2
in cos
sin cos
sin cos
0
( ) sin
0
h
h
h
m l
m l
m gl
&
&
g q
và các ma trận, vector hàm này cũng thỏa
mãn các điều kiện cần phải có (30), (31) của
một hệ Euler-Lagrange.
MÔ HÌNH CẨU TREO CHUYỂN ĐỘNG
THEO HAI PHƢƠNG TRỰC GIAO
Đã có nhiều tài liệu trình bày về mô hình 3D
một đầu vào, ví dụ [1,…,9] nhƣng chúng rất
khác nhau về quy định trạng thái, thứ tự đầu
vào. Mô hình đƣợc trình bày ở bài báo này sẽ
có sự nhất quán với tất cả các mô hình ở
chƣơng 2.
Khác với nội dung đã có ở mục II. trƣớc đây
cũng về hệ cẩu treo 3D hai đầu vào, thì ở đây,
ta sẽ xét hệ cẩu treo có dạng cẩu giàn, tức là
xe cẩu với khối lƣợng cm sẽ di chuyển theo
cả hai chiều x và y trực giao nhau trong mặt
phẳng nằm ngang. Sự di chuyển đó đƣợc tạo
ra bởi lực đẩy 1( )u t theo phƣơng x và 2( )u t
theo phƣơng y độc lập với nhau (hình H4).
Hai lực đẩy này chính là hai tín hiệu đầu vào
của hệ.
Còn lại, khái niệm 3D ở đây cũng đƣợc hiểu
tƣơng tự nhƣ ở mục II.C, tức là hàng hm ,
dƣới tác động của lực quán tính trong quá
trình vận chuyển, sẽ dao động lắc lƣ theo cả
ba chiều ( , , )x y z trong không gian nhƣ mô tả
ở hình 4.
Để đơn giản, trƣớc tiên ta giả thiết trong quá
trình cẩu hàng, chiều dài l của dây treo hàng
là hằng số. Nói cách khác, hệ chỉ có hai tín
hiệu vào duy nhất là 1u và 2u .
Hình 4. Mô hình 3D hai phương
Xe cẩu di chuyển theo phƣơng x trên một
thành xà đỡ có khối lƣợng xm . Nhƣ vậy, toàn
bộ khối lƣợng đƣợc dịch chuyển dọc theo trục y sẽ bao gồm cm của xe cẩu, xm của xà đỡ
và hm của hàng đƣợc vận chuyển. Khi đó, và
cùng với các ký hiệu về độ sai lệch tọa độ
, ,x y zl l l của hàng đã có trƣớc đây là công thức
(35), sinh ra bởi dao động quán tính, ta sẽ có
hàm động năng E và thế năng V của hệ nhƣ
sau:
2 2 2 2
2 2 2
1 1 1( ) ( ) ( )
2 2 2
1 ( sin ) cos cos
2
sin sin cos sin
sin cos
cos
c h c h x h
h h
h h
h
h z h
E m m x m m m y m l J
m l J m lx
m lx m ly
m ly
V gm l gm l
&& &
&& &
&&& &
&&
tức là hệ có hàm Lagrange L E V :
2 2 2 2
2 2 2
1 1 1( ) ( ) ( )
2 2 2
1 ( sin ) cos cos
2
sin sin cos sin
sin cos cos
c h c h x h
h h
h h
h h
L m m x m m m y m l J
m l J m lx
m lx m ly
m ly gm l
&& &
&& &
&&& &
&&
Thay hàm Lagrange trên vào phƣơng trình
(28) ta có với:
1 2( , , 0 , 0)
( , , , )
T
T
u u
x yq (38)
mô hình Euler-Lagrange của hệ nhƣ sau:
( ) ( , ) ( )&& &&q q q q q g qM C
trong đó , q đƣợc định nghĩa bởi (38) và:
yl
xl
2u cm
xm
1u x
y
hm
l x
y
z

Nguyễn Thị Việt Hƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 27 - 36
33
2
2 2
0 cos cos
0 cos sin( )
cos cos cos sin
sin sin sin cos 0
sin sin
sin cos
0
sin
c h h
c h x h
h h h
h h
h
h
h
m m m l
m m m m l
m l m l m l J
m l m l
m l
m l
m l J
qM
2
2
0 0 sin cos cos sin
0 0 sin sin cos cos( , )
0 0 0
0 0 sin cos
cos sin sin cos
cos cos sin sin
sin cos
h h
h h
h
h h
h h
h
m l m l
m l m l
m l
m l m l
m l m l
m l
m
& &
& &&
&
& &
& &
&
q qC
2sin coshl &
và
0
0( )
sin
0
hm glg q
Có thể thấy các ma trận ( ), ( , )&q q qM C trên là
thỏa mãn hai điều kiện bắt buộc (30), (31) của
một hệ Euler-Lagrange.
XÂY DỰNG KHÂU QUAN SÁT
TRẠNG THÁI
Để xây dựng bộ quan sát trạng thái, [15] đã
tiến hành lần lƣợt các bƣớc sau:
Chuyển (13) về mô hình trên không gian
trạng thái:
1 2
2 1 2 1 2, ,
x =x
x x ,x ,u + x ,x ,uf t t
&
&
với 1 2, ,u x xU t (14)
Lúc này thành phần xác định của hệ sẽ có
dạng 1
1 2 1
1 2 2 2 2 1
,x ,x ,u M x
C x ,x x D x P x G x u
l
l l l l
f t
(15)
và thành phần bất định đƣợc chuyển vào
1 2,x ,x ,ut.
Bộ quan sát đƣợc đề xuất nhƣ sau:
µµ ¶ µ
µµ µ
µ
1
212 1 1 1 1
1
2 1 1 2 2 2 1
1 1
x=x diag diag sign x x
x M x C x ,x x D x G x τ
diag sign x x
i i i
l l l l
i
dx x
dt
&
(16)
Với i , i
là hằng số đủ lớn đƣợc lựa chọn
theo biên của 1 2,x ,x ,ut [15]
MÔ PHỎNG VỚI MATLAB
Từ mô hình toán đƣợc nêu ở trên, bài báo tiến
hành xây dựng mô hình cẩu treo 3D trên
Matlab - Simulink phiên bản R2013a
(Matlab2013a), với thông số kỹ thuật:
Khối lƣợng xà đỡ (bỏ qua)
Khối lƣợng xe cẩu (1 kg)
Khối lƣợng tải (10 kg)
Momen quán tính tải 2 210 ( )Jkg
Để đánh giá khả năng sử dụng mô hình này,
bài báo thực hiện phép so sánh nó với mô
hình “vrcrane_traj.xls” đã có trong
Matlab2013a có cùng chức năng đƣợc sử
dụng để mô tả cẩu treo 3D. Tuy nhiên mô
hình “vrcrane_traj.xls” chỉ xét đến trƣờng
hợp đặc biệt là tại 1 thời điểm bất kỳ, chỉ có
duy nhất 1 hƣớng chuyển động của xe cẩu
theo trục x hoặc y đƣợc tiến hành và góc
lệch , đủ nhỏ. Điều này có thể thấy rõ
trong “vrcrane_traj.xls” bởi sự xuất hiện 2
thành phần trên trục x và y trong mô hình có
cấu trúc hoàn toàn giống nhau. Cả 2 mô hình
nói trên đều sử dụng 1 hệ thống điều khiển vị
trí theo trục x và y của xe cẩu, thực tế dựa
vào hệ thống truyền động gồm 2 động cơ điện
1 chiều giúp dịch chuyển xà đỡ và xe cẩu.
Bài báo tiến hành 2 mô phỏng chính:
Lƣợng đặt vị trí đƣợc thể hiện nhƣ hình 5
cho thấy sự tách biệt 2 chiều chuyển động
giúp so sánh mô hình xây dựng của bài báo và
mô hình đã có trong Matlab.
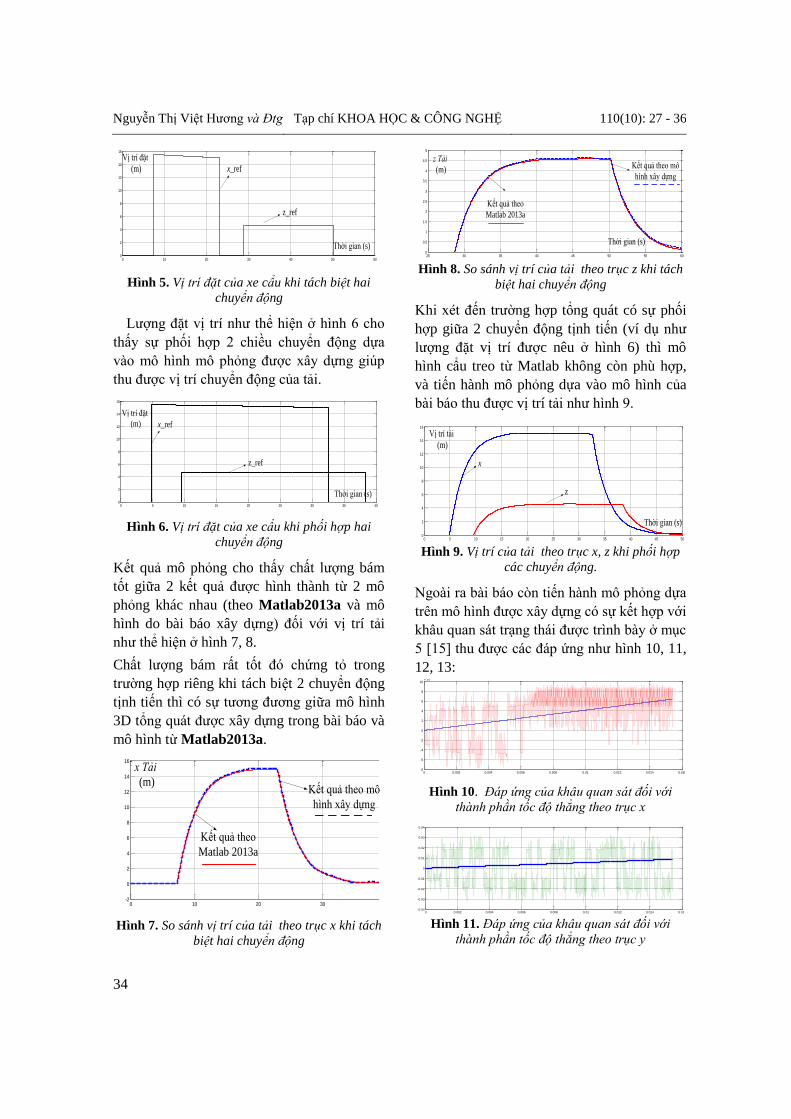
Nguyễn Thị Việt Hƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 27 - 36
34
0 10 20 30 40 50 600
2
4
6
8
10
12
14
16
Thời gian (s)
Vị trí đặt
(m) x_ref
z_ref
Hình 5. Vị trí đặt của xe cẩu khi tách biệt hai
chuyển động
Lƣợng đặt vị trí nhƣ thể hiện ở hình 6 cho
thấy sự phối hợp 2 chiều chuyển động dựa
vào mô hình mô phỏng đƣợc xây dựng giúp
thu đƣợc vị trí chuyển động của tải.
0 5 10 15 20 25 30 35 400
2
4
6
8
10
12
14
16
x_ref
z_ref
Thời gian (s)
Vị trí đặt
(m)
Hình 6. Vị trí đặt của xe cẩu khi phối hợp hai
chuyển động
Kết quả mô phỏng cho thấy chất lƣợng bám
tốt giữa 2 kết quả đƣợc hình thành từ 2 mô
phỏng khác nhau (theo Matlab2013a và mô
hình do bài báo xây dựng) đối với vị trí tải
nhƣ thể hiện ở hình 7, 8.
Chất lƣợng bám rất tốt đó chứng tỏ trong
trƣờng hợp riêng khi tách biệt 2 chuyển động
tịnh tiến thì có sự tƣơng đƣơng giữa mô hình
3D tổng quát đƣợc xây dựng trong bài báo và
mô hình từ Matlab2013a.
0 10 20 30 40 50 60-2
0
2
4
6
8
10
12
14
16
x Tải
(m)
Kết quả theo
Matlab 2013a
Kết quả theo mô
hình xây dựng
Hình 7. So sánh vị trí của tải theo trục x khi tách
biệt hai chuyển động
25 30 35 40 45 50 55 600
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
z Tải
(m) Kết quả theo mô
hình xây dựng
Kết quả theo
Matlab 2013a
Thời gian (s)
Hình 8. So sánh vị trí của tải theo trục z khi tách
biệt hai chuyển động
Khi xét đến trƣờng hợp tổng quát có sự phối
hợp giữa 2 chuyển động tịnh tiến (ví dụ nhƣ
lƣợng đặt vị trí đƣợc nêu ở hình 6) thì mô
hình cẩu treo từ Matlab không còn phù hợp,
và tiến hành mô phỏng dựa vào mô hình của
bài báo thu đƣợc vị trí tải nhƣ hình 9.
0 5 10 15 20 25 30 35 40 45 500
2
4
6
8
10
12
14
16
Thời gian (s)
x
z
Vị trí tải
(m)
Hình 9. Vị trí của tải theo trục x, z khi phối hợp
các chuyển động.
Ngoài ra bài báo còn tiến hành mô phỏng dựa
trên mô hình đƣợc xây dựng có sự kết hợp với
khâu quan sát trạng thái đƣợc trình bày ở mục
5 [15] thu đƣợc các đáp ứng nhƣ hình 10, 11,
12, 13:
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016-8
-6
-4
-2
0
2
4
6
8
10x 10
-3
Hình 10. Đáp ứng của khâu quan sát đối với
thành phần tốc độ thẳng theo trục x
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Hình 11. Đáp ứng của khâu quan sát đối với
thành phần tốc độ thẳng theo trục y
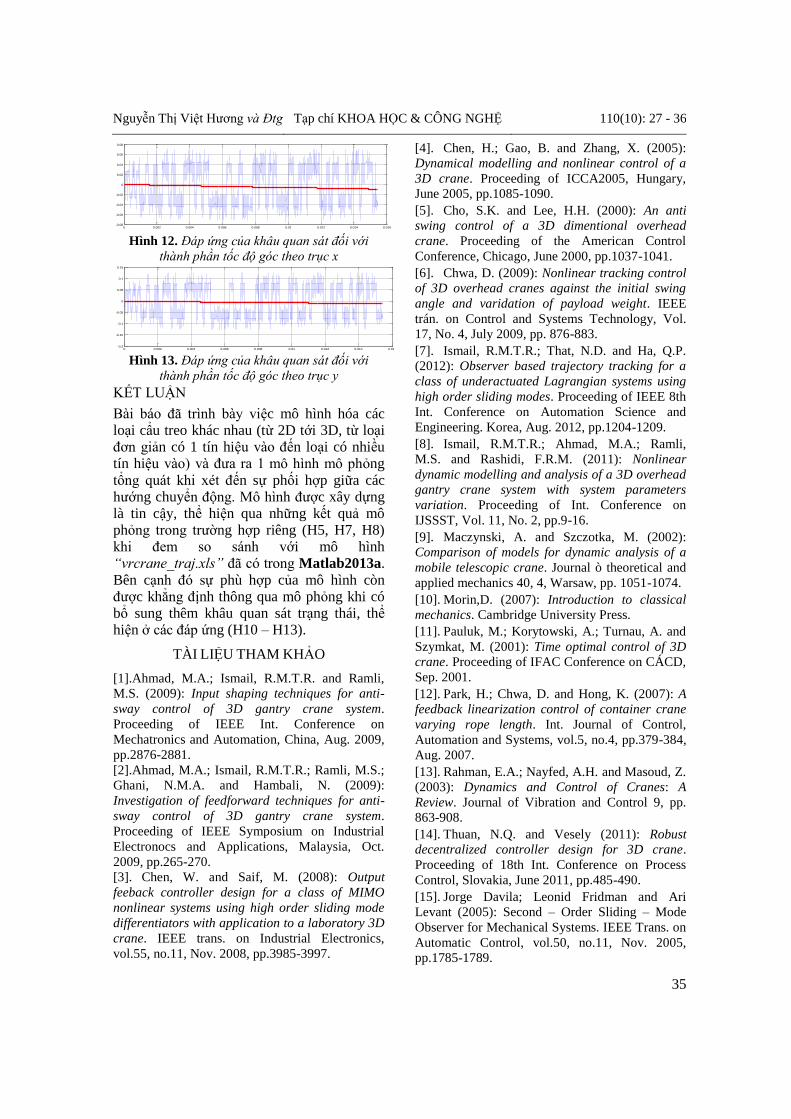
Nguyễn Thị Việt Hƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 27 - 36
35
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Hình 12. Đáp ứng của khâu quan sát đối với
thành phần tốc độ góc theo trục x
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Hình 13. Đáp ứng của khâu quan sát đối với
thành phần tốc độ góc theo trục y
KẾT LUẬN
Bài báo đã trình bày việc mô hình hóa các loại cẩu treo khác nhau (từ 2D tới 3D, từ loại đơn giản có 1 tín hiệu vào đến loại có nhiều tín hiệu vào) và đƣa ra 1 mô hình mô phỏng
tổng quát khi xét đến sự phối hợp giữa các hƣớng chuyển động. Mô hình đƣợc xây dựng là tin cậy, thể hiện qua những kết quả mô phỏng trong trƣờng hợp riêng (H5, H7, H8) khi đem so sánh với mô hình “vrcrane_traj.xls” đã có trong Matlab2013a.
Bên cạnh đó sự phù hợp của mô hình còn đƣợc khẳng định thông qua mô phỏng khi có bổ sung thêm khâu quan sát trạng thái, thể hiện ở các đáp ứng (H10 – H13).
TÀI LIỆU THAM KHẢO
[1].Ahmad, M.A.; Ismail, R.M.T.R. and Ramli,
M.S. (2009): Input shaping techniques for anti-
sway control of 3D gantry crane system.
Proceeding of IEEE Int. Conference on
Mechatronics and Automation, China, Aug. 2009,
pp.2876-2881.
[2].Ahmad, M.A.; Ismail, R.M.T.R.; Ramli, M.S.;
Ghani, N.M.A. and Hambali, N. (2009):
Investigation of feedforward techniques for anti-
sway control of 3D gantry crane system.
Proceeding of IEEE Symposium on Industrial
Electronocs and Applications, Malaysia, Oct.
2009, pp.265-270.
[3]. Chen, W. and Saif, M. (2008): Output
feeback controller design for a class of MIMO
nonlinear systems using high order sliding mode
differentiators with application to a laboratory 3D
crane. IEEE trans. on Industrial Electronics,
vol.55, no.11, Nov. 2008, pp.3985-3997.
[4]. Chen, H.; Gao, B. and Zhang, X. (2005):
Dynamical modelling and nonlinear control of a
3D crane. Proceeding of ICCA2005, Hungary,
June 2005, pp.1085-1090.
[5]. Cho, S.K. and Lee, H.H. (2000): An anti
swing control of a 3D dimentional overhead
crane. Proceeding of the American Control
Conference, Chicago, June 2000, pp.1037-1041.
[6]. Chwa, D. (2009): Nonlinear tracking control
of 3D overhead cranes against the initial swing
angle and varidation of payload weight. IEEE
trán. on Control and Systems Technology, Vol.
17, No. 4, July 2009, pp. 876-883.
[7]. Ismail, R.M.T.R.; That, N.D. and Ha, Q.P.
(2012): Observer based trajectory tracking for a
class of underactuated Lagrangian systems using
high order sliding modes. Proceeding of IEEE 8th
Int. Conference on Automation Science and
Engineering. Korea, Aug. 2012, pp.1204-1209.
[8]. Ismail, R.M.T.R.; Ahmad, M.A.; Ramli,
M.S. and Rashidi, F.R.M. (2011): Nonlinear
dynamic modelling and analysis of a 3D overhead
gantry crane system with system parameters
variation. Proceeding of Int. Conference on
IJSSST, Vol. 11, No. 2, pp.9-16.
[9]. Maczynski, A. and Szczotka, M. (2002):
Comparison of models for dynamic analysis of a
mobile telescopic crane. Journal ò theoretical and
applied mechanics 40, 4, Warsaw, pp. 1051-1074.
[10]. Morin,D. (2007): Introduction to classical
mechanics. Cambridge University Press.
[11]. Pauluk, M.; Korytowski, A.; Turnau, A. and
Szymkat, M. (2001): Time optimal control of 3D
crane. Proceeding of IFAC Conference on CÁCD,
Sep. 2001.
[12]. Park, H.; Chwa, D. and Hong, K. (2007): A
feedback linearization control of container crane
varying rope length. Int. Journal of Control,
Automation and Systems, vol.5, no.4, pp.379-384,
Aug. 2007.
[13]. Rahman, E.A.; Nayfed, A.H. and Masoud, Z.
(2003): Dynamics and Control of Cranes: A
Review. Journal of Vibration and Control 9, pp.
863-908.
[14]. Thuan, N.Q. and Vesely (2011): Robust
decentralized controller design for 3D crane.
Proceeding of 18th Int. Conference on Process
Control, Slovakia, June 2011, pp.485-490.
[15]. Jorge Davila; Leonid Fridman and Ari
Levant (2005): Second – Order Sliding – Mode
Observer for Mechanical Systems. IEEE Trans. on
Automatic Control, vol.50, no.11, Nov. 2005,
pp.1785-1789.
Nguyễn Thị Việt Hƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 27 - 36
36
SUMMARY
MODELLING AND USING STATE OBSERVER IN SIMULATION
FOR GANTRY CRANE
Nguyen Thi Viet Huong
1,*, Dao Phuong Nam
2, Nguyen Doan Phuoc
2
1Industrial Economic Technology College, 2Hanoi of University and Technology
To improve control performance of gantry cranes are needed sufficient precise mathematical
modele. This article presents various nonlinear modele of gantry cranes, such as 2D or 3D model
and modele of crane with one input or of complicated ones with multi-inputs. All obtained modele,
undepended on the kind of cranes they describe, have the same definition of states variables, which
allows applying of common control method afterwards.
Keywords: Gantry cranes, Overhead cranes, Observer, Euler-Lagrange equation; Underactuated
systems.
- Bài báo là kết quả nghiên cứu thuộc đề tài NCS của1 và đề tài NCKH cấp Bộ của chủ nhiệm đề tài1 mã số 095.13
RD/HĐ-KHCN.
Ngày nhận bài: 07/9/2013; Ngày phản biện: 05/10/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: TS. Đỗ Trung Hải – Trường ĐH Kỹ thuật Công nghiệp – ĐHTN
* Tel: 0914609992; Email: [email protected]
Hoàng Thị Thƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 37 - 43
37
SỰ KẾT HỢP GIỮA THIẾT BỊ LOGIC KHẢ TRÌNH
VÀ GIAO DIỆN NGƢỜI – MÁY (HMI) TRONG VIỆC
ĐIỀU KHIỂN VÀ GIÁM SÁT HỆ THỐNG MÁY CHIẾT BIA
Hoàng Thị Thƣơng*, Vũ Thị Oanh
Trường ĐH Công nghệ Thông tin và Truyền thông – ĐH Thái Nguyên
TÓM TẮT Bài báo này trình bày mô hình mô phỏng dây chuyền sản xuất bia sử dụng thiết bị logic khả trình
PLC và giao diện ngƣời - máy HMI. PLC là thiết bị đƣợc sử dụng rộng rãi trong công nghiệp, cho
phép ngƣời kỹ sƣ thực hiện các thuật toán điều khiển linh hoạt thông qua một ngôn ngữ lập trình.
Hơn nữa HMI là giao diện thuận tiện cho việc giám sát và điều khiển quá trình thông qua phần mềm
trên máy tính. Trong bài báo này, chúng tôi sử dụng PLC S7 - 300 của SIEMENS và WinCC phiên
bản 7.0. Các công đoạn khác nhau trong dây chuyền sản xuất và các giải pháp thông qua mô phỏng
đƣợc đƣa ra nhằm đảm bảo tính tự động hóa trong quá trình sản xuất. Cuối cùng, tính hiệu quả của
việc điều khiển và giám sát dây chuyền đã đƣợc thể hiện qua kết quả mô phỏng nhằm đảm bảo quá
trình tự động hóa giúp tăng năng suất, cải tiến chất lƣợng và đảm bảo an toàn vệ sinh thực phẩm.
Từ khoá: PLC, WINCC, máy chiết bia, dây chuyền sản xuất bia, vệ sinh an toàn thực phẩm.
ĐẶT VẤN ĐỀ*
Hiện nay trong thời kỳ phát triển của thế giới,
cuộc sống của con ngƣời ngày càng đƣợc
nâng cao, ngày càng nhiều đồ uống - thực
phẩm đƣợc sản xuất để phục vụ nhu cầu của
con ngƣời nhƣ bia, rƣợu, nƣớc ngọt…Bia hơi
loại đồ uống thực phẩm quen thuộc đƣợc sử
dụng nhiều ở các nƣớc trên thế giới, trong đó
có nƣớc ta. Những loại thực phẩm này rất tiện
lợi và đƣợc ƣa chuộng rộng rãi. Trong quá
trình sản xuất và chế biến thì tính an toàn thực
phẩm luôn đƣợc đặt lên hàng đầu. Xuất phát từ
yêu cầu thực tế trên, trong bài báo này chúng
tôi đề xuất một phƣơng án điều khiển tự động
và giám sát quá trình sản xuất bia nhằm đảm
bảo quá trình tự động hóa cao giúp tăng năng
suất, cải tiến chất lƣợng và nâng cao tính an
toàn vệ sinh thực phẩm trong công nghiệp.
TÌM HIỂU CÁC QUÁ TRÌNH SẢN XUẤT
CỦA DÂY CHUYỀN SẢN XUẤT BIA
Trong quá trình khảo sát thực tế kết hợp với
việc nghiên cứu, chúng tôi nghiên cứu về
công nghệ của dây chuyền sản xuất bia hơi.
Trong các nhà máy bia, ngƣời ta sử dụng các
dây chuyền sản xuất bia với nhiều mức công
* Tel: 01674669347; Email: [email protected]
suất khác nhau nhƣ là dây chuyền sản xuất
bia hơi công suất 120 kg/h, công suất 240
kg/h, dung tích 50 lít/keg, 30 lít/keg, 20
lít/keg…[2]
Trong bài báo này, chúng tôi nghiên cứu về
dây chuyền sản xuất bia hơi với công suất 240
kg/h, dung tích 50 lít/keg [4].
Dây chuyền này bao gồm các hệ thống sau:
Hệ thống pallet và robot
Hệ thống máy rửa ngoài
Hệ thống máy chiết bia hơi
Hệ thống cân
Hệ thống thành phẩm
Các hệ thống này đƣợc điều khiển và giám sát
bởi các trạm điều khiển và ngƣời điều khiển.
Có 1 trạm điều khiển trung tâm cho cả dây
chuyền (PLC S7 - 300 và WINCC) [4].
Sau đây chúng ta sẽ đi vào tìm hiểu chi tiết
các hệ thống:
Hệ thống pallet và robot
Các pallet chứa keg bia rỗng đƣợc các hệ
thống vận chuyển từ ngoài đƣa vào đƣờng
goong để cho robot rỡ ra. Robot gắp vỏ keg
bia từ các pallet và đƣa vào băng tải để chuẩn
bị đƣa vào máy rửa ngoài.
Hoàng Thị Thƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 37 - 43
38
Hệ thống máy rửa ngoài
Hệ thống máy rửa ngoài bao gồm 2
khoang: khoang 1 là khoang rửa bằng dung
dịch xút loãng và khoang 2 là khoang rửa
bằng nƣớc lạnh.
Trong mỗi khoang đều có các sensor báo có
keg đến, có các vòi phun tia từ phía trên cao
và ngang để rửa sạch bụi bẩn bên ngoài nhằm
đảm bảo vệ sinh bên ngoài keg.
Hệ thống máy chiết bia hơi TRANSOMAT [2]
Hệ thống này bao gồm 3 máy chiết Transomat
hoạt động tƣơng tự nhau: MU1, MU2, MU3
và đặt song song với nhau. Mỗi máy chiết có
công suất tối đa là 80 keg/h. Mỗi máy chiết
gồm 6 trạm chiết (filling stations), hệ thống
vận chuyển thanh xà làm việc đồng bộ. Với
thể tich chiết là 50 lit/keg.
Ba máy chiết này đều có chung hệ thống vận
chuyển đƣờng gòong vào, ra. Keg sau khi đi
ra từ máy rửa ngoài sẽ chạy lần lƣợt trên hệ
thống gòong tới máy chiết cuối cùng rồi tới
máy thứ 2, sau cùng là máy thứ 1.
Nguyên lý làm việc của 3 máy này tƣơng tự
nhau: Đầu tiên, khi có tín hiệu báo có keg thì
thanh xà vận chuyển di chuyển đi lên và nâng
keg lên, di chuyển sang phải đƣa keg tới trạm
chiết tiếp theo. Sau đó thanh xà hạ xuống thấp
và di chuyển sang trái đồng thời kẹp keg sẽ đi
xuống để giữ keg, các trạm chiết bắt đầu hoạt
động. Sau khi các trạm làm việc xong thì
thanh xà lại nâng lên và tiếp tục di chuyển các
keg tới các trạm tiếp theo. Quá trình đƣợc lặp
đi lặp lại.
Trong mỗi hệ thống máy chiết bao gồm: hệ
thống thanh xà vận chuyển, kẹp keg, đầu rửa
(vòi phun), đầu chiết (filling head), 6 trạm
chiết, các van điện khí nén, các bơm hóa chất
(detergent pumps), các thùng chứa hóa chất
(detergent tank), thùng chứa vật liệu (media
tank) và các loại sensor.
Hệ thống cân kiểm tra trọng lƣợng keg sau
khi chiết [4]
Sau khi ra khỏi máy chiết, keg lần lƣợt chạy
qua hệ thống cân kiểm tra. Keg đủ cân chạy
thẳng ra goòng chờ để robot gắp lên pallet
thành phẩm. Keg không đủ cân thì bị gạt sang
bên và chạy ra ngoài để xử lý.
CÁC THIẾT BỊ TRONG HỆ THỐNG ĐIỀU
KHIỂN
Các thiết bị trong hệ thống điều khiển bao
gồm nhƣ sau [2]:
Các cảm biến:
Các thiết bị bảo vệ giám sát quá trình dùng để
giám sát và điều khiển quá trình rửa và chiết
trong hệ thống.
* Cảm biến áp suất (pressure sensor)
Cảm biến áp suất sử dụng ở đây là loại cảm
biến hoạt động dựa trên nguyên tắc của cảm
biến điện dung nên có độ chính xác cao. Tín
hiệu ra là loại nguồn dòng từ 4 20 mA hoặc
tín hiệu ra là loại nguồn áp 0 10 V. Trong hệ
thống này ta sử dụng cảm biến áp suất ở trạm
1 và trạm 6.
* Cảm biến lưu lượng(Liquid measuring
sensor)
Máy chiết sử dụng thiết bị loại IZMS, thiết bị
gồm có 02 phần: phần cảm biến từ và bộ biến
đổi hiển thị của hãng GEA Diessel. Thiết bị
IZM là loại thiết bị đo dòng chảy từ trƣờng sử
dụng để đo lƣu lƣợng và thể tích của dòng
chảy chất lỏng với độ chính xác rất cao, hoạt
động dựa trên nguyên lý của đồng hồ đo lƣu
lƣợng dùng turbine.
* Cảm biến báo khô
Mô tả: Cảm biến hoạt động dựa trên nguyên
tắc tạo âm thoa trong không khí với một tần
số cộng hƣởng. Cảm biến sử dụng thạch anh
áp điện để kích thích tần số dao động và giám
sát tần số thực tế.
* Cảm biến nhiệt độ (temperature switch)
Cảm biến nhiệt độ đƣợc dùng ở đây là cảm
biến DIN 43760 có thông số nhƣ sau:
Tín hiệu ra: 4 – 20 mA
Điện áp nguồn: 10 – 30 VDC
R max = 1000 với nguồn 30V
Dải đo: 0 – 1005 C
* Cảm biến tiệm cận (proximity sensor)
Ở đây chúng ta sử dụng cảm biến tiệm cận
điện cảm hay còn gọi là khóa điện từ
(solenoid switch) để giám sát sự di chuyển
lên, xuống của piston xilanh khí nén.
Hoàng Thị Thƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 37 - 43
39
Các thiết bị khí nén
Các thiết bị khí nén bao gồm các van khí nén
và xilanh khí nén đƣợc sử dụng trong toàn bộ
hệ thống.
* Van khí nén: Van 2/2 đƣờng đƣợc sử dụng
để điều khiển trong dây chuyền sản xuất bia
hơi. Tất cả các chất tẩy rửa đƣợc cấp vào và
xả ra qua van vật liệu 2/2 đƣờng với một bộ
điều khiển piston khí nén.
* Xilanh khí nén: Các xillanh khí nén đƣợc
sản xuất bởi hãng Festo. Các xilanh có 2
đƣờng vào, một đƣờng để đẩy pittông lên và
đƣờng kia để đóng pittông lại. Trạng thái bình
thƣờng, khi khí nén đƣợc cấp vào một đƣờng
thì đƣờng kia phải đƣợc mở ra để giải phóng
khí trong xilanh và ngƣợc lại.
Hình 1. Xilanh khi nén của hãng FESTO
Quy trình công nghệ của hệ thống máy
chiết bia hơi [2]
Máy chiết TRANSOMAT của KHS của Đức
sử dụng trong hệ thống đƣợc mô tả nhƣ sau:
Hình 2. Hệ thống máy chiết TRANSOMAT
Hệ thống máy chiết làm việc bao gồm 6 trạm
làm việc độc lập đƣợc vận chuyển qua hệ
thống thanh xà.
Mô tả chức năng của hệ thống vận chuyển
(Functional Description of Transport
system)
Keg cần phải rửa và chiết đƣợc cung cấp tới
hệ thống chiết dọc theo một hệ thống vận
chuyển. Hệ thống vận chuyển này bao gồm
một thanh xà vận chuyển và một hệ thống
điều khiển dịch chuyển.
Hệ thống điều khiển dịch chuyển
(conveyor driver system )
Thanh xà (walking beam) đƣợc điều khiển bởi
2 xy lanh khí nén (pneumatic cylinder) theo
hƣớng điều khiển ngang (the transportation
rail) và điều khiển thẳng đứng.
Thanh xà (Walking beam)
Những chiếc Keg đƣợc vận chuyển trên máy
chiết bởi 1 thanh xà điều khiển bằng khí nén.
Mỗi máy chiết MU sử dụng một thanh xà
(Walking Beam) vận chuyển làm nhiệm vụ
vận chuyển keg từ ngoài (đƣờng gòong vận
chuyển của máy rửa) vào các trạm xử lý để
thực hiện quá trình rửa bên trong keg và chiết.
Sau đó lại đƣa keg từ trạm chiết số 6 đi ra
sang vị trí chờ chuẩn bị để đƣa sang đƣờng
gòong của hệ thống cân trọng lƣợng. Thanh
xà thực hiện những dịch chuyển dòng chảy
qua từng giai đoạn trong hệ thống máy chiết
nhƣ hình dƣới.
Mô tả chức năng của hệ thống rửa và chiết
(Functional Description of Cleaning and
Filling)
Quá trình chiết và rửa trong keg: Các chất
tẩy rửa và sản phẩm chiết (bia) đƣợc cung cấp
vào máy chiết hoặc thải ra từ máy chiết đều
đƣợc đi qua những đƣờng ống bằng thép
chống gỉ (stainless steel pipes).
Hệ thống máy chiết thực hiện quá trình tẩy
rửa khử trùng bằng cách phun dƣới dạng tia
áp lực của các chất tẩy rửa: xút/axit, xút/xút
hoặc axit/axit. Bia đƣợc chiết vào một cách
cẩn thận và với một tổn thất thấp nhất, sử
dụng việc điều chỉnh áp lực vi sai và điều
chỉnh tốc độ chiết vô cấp.
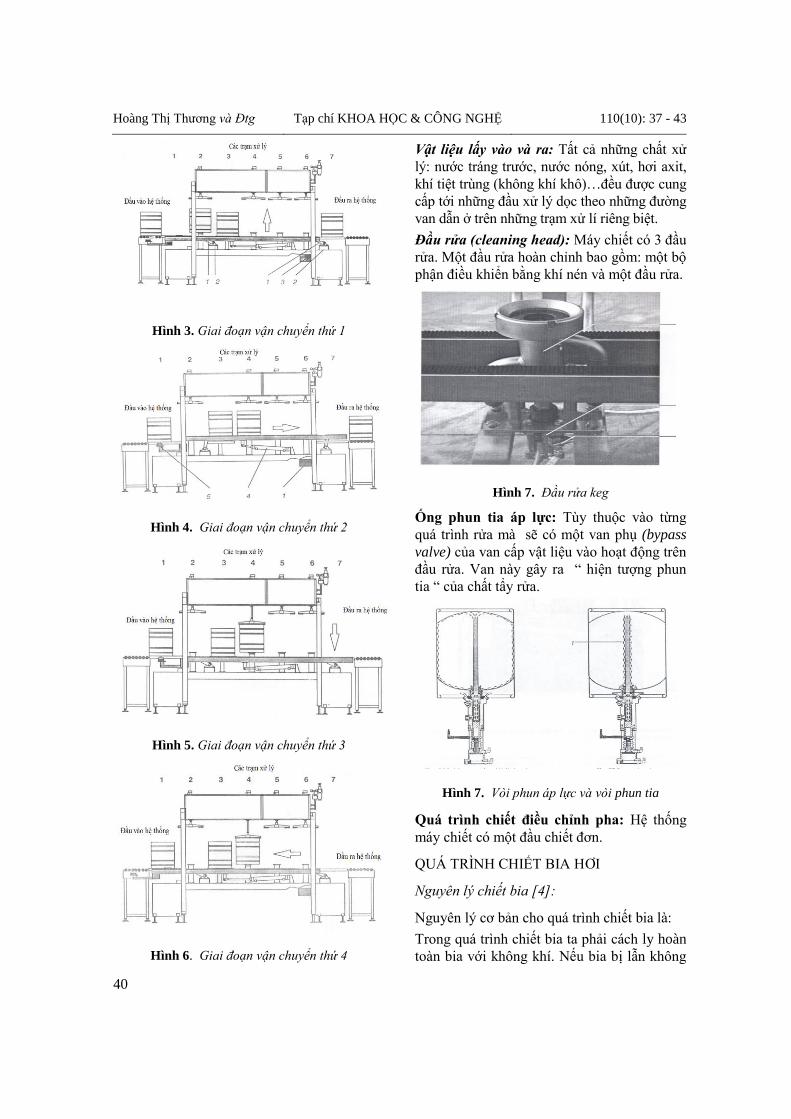
Hoàng Thị Thƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 37 - 43
40
Hình 3. Giai đoạn vận chuyển thứ 1
Hình 4. Giai đoạn vận chuyển thứ 2
Hình 5. Giai đoạn vận chuyển thứ 3
Hình 6. Giai đoạn vận chuyển thứ 4
Vật liệu lấy vào và ra: Tất cả những chất xử
lý: nƣớc tráng trƣớc, nƣớc nóng, xút, hơi axit,
khí tiệt trùng (không khí khô)…đều đƣợc cung
cấp tới những đầu xử lý dọc theo những đƣờng
van dẫn ở trên những trạm xử lí riêng biệt.
Đầu rửa (cleaning head): Máy chiết có 3 đầu
rửa. Một đầu rửa hoàn chỉnh bao gồm: một bộ
phận điều khiển bằng khí nén và một đầu rửa.
Hình 7. Đầu rửa keg
Ống phun tia áp lực: Tùy thuộc vào từng
quá trình rửa mà sẽ có một van phụ (bypass
valve) của van cấp vật liệu vào hoạt động trên
đầu rửa. Van này gây ra “ hiện tƣợng phun
tia “ của chất tẩy rửa.
Hình 7. Vòi phun áp lực và vòi phun tia
Quá trình chiết điều chỉnh pha: Hệ thống
máy chiết có một đầu chiết đơn.
QUÁ TRÌNH CHIẾT BIA HƠI
Nguyên lý chiết bia [4]:
Nguyên lý cơ bản cho quá trình chiết bia là:
Trong quá trình chiết bia ta phải cách ly hoàn
toàn bia với không khí. Nếu bia bị lẫn không

Hoàng Thị Thƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 37 - 43
41
khí 2O vào thì sẽ làm giảm chất lƣợng bia,
lƣợng 2O quá cao thì sẽ hình thành hiện
tƣợng sủi bọt bia. Vì vậy trong quá trình chiết
bia, lƣợng 2O cho phép không vƣợt quá
khoảng 0.02 mg/l tới 0.04 mg/l [4] .
Hình 8. Đầu chiết
Áp suất bia trong quá trình chiết phải là hằng
số và áp suất khí 2CO nạp vào keg để cân
bằng áp suất đối khi chiết phải đảm bảo tới
một áp suất cho trƣớc .
Tất cả các đầu rửa và đầu chiết phải đƣợc
làm sạch, khử trùng liên tục để đảm bảo chất
lƣợng sản phẩm và vệ sinh an toàn thực
phẩm.
Sơ đồ chiết:
Tốc độ chiết đƣợc điều khiển bởi PLC theo
thể tích bia đã đƣợc chiết rồi. Nó điều khiển
dạng của giá trị điểm đặt dựa trên bảng biểu
diễn các thông số của van màng ngăn hiện
thời (hình 9) .
Hình 9. Sơ đồ chiết
Thông số của quá trình chiết bia đƣợc mô tả
nhƣ sau [4]:
Bảng 1. Thông số của quá trình chiết bia
Thông
số Mô tả Giá trị
Mặc
định
1
Áp suất
kiểm tra
Kiểm tra
áp suất hơi
đƣợc nạp ở
trạm 5
Đặt giá
trị 0.5 bar
2
Áp suất
bia
Đặt giá trị
thực tế của
bia
Đặt giá
trị 2.5 bar
3
Áp suất
thực
trong
keg
Chỉ ra áp
suất thực tế
trong keg.
Giá trị
thực tế Set/bar
4
Áp suất
đối
Áp suất đối
là tổng áp
suất bia
đầu vào với
áp suất đối
Đặt giá
trị 0 bar
5
Áp suất
bão hoà
Áp suất tối
thiểu
Đặt giá
trị 1.5 bar
Sơ đồ công nghệ của các trạm xử lý và chiết
của máy chiết bia.
Hình 10. Trạm xử lý thứ nhất
Hình 11. Trạm xử lý thứ 2 và 3

Hoàng Thị Thƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 37 - 43
42
Hình 12. Trạm xử lý thứ 4
Hình 13. Trạm xử lý thứ 5
Hình 14. Trạm xử lý thứ 6
Quá trình chiết bia đƣợc sản xuất qua 6 trạm.
Bài báo cáo này chúng tôi xây dựng chƣơng
trình điều khiển và giám sát các trạm xử lý và
chiết ứng dụng phần mềm PLC S7 – 300 [1]
và phầm mềm điều khiển giám sát ngƣời -
máy (HMI) WINCC [3].
KẾT QUẢ MÔ PHỎNG
Hình 15. Giao diện trạm 1:
Hình 16. Giao diện trạm 2 và 3
Hình 17. Giao diện trạm 4
Hình 18. Giao diện trạm 5:
Hình 19. Giao diện trạm 6

Hoàng Thị Thƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 37 - 43
43
Nhận xét:
Qua kết quả mô phỏng trên giao diện PC, ta có thể dễ dàng điểu khiển và giám sát các quá trình xử lý và chiết bia hoàn toàn tự động.
KẾT LUẬN
Bằng việc ứng dụng phần mềm điều khiển PLC S7 – 300 và phần mềm giám sát WINCC, chúng tôi đã xây dựng đƣợc 6 trạm xử lý và chiết bia của hệ thống máy chiết qua giao diện máy tính PC. Với việc sử dụng những ứng dụng trên sẽ góp phần nâng cao chất lƣợng, tăng năng suất lao động, đảm bảo vệ sinh an toàn phẩm và đặc biệt là giúp chúng ta chủ động hơn trong việc làm chủ công nghệ không phụ thuộc quá nhiều vào đối tác nƣớc ngoài.
TÀI LIỆU THAM KHẢO
[1]. Nguyễn Doãn Phƣớc, Phan Xuân Minh, Vũ
Văn Hà, (2000). Tự động hoá với Simatic S7-300.
Nxb Khoa học và Kỹ thuật.
[2]. Wolfgang Kunze, tái bản 2010. Technology
Brewing and Malting. Nxb VLB Berlin.
[3]. Trần Thu Hà, Phạm Quang Huy, (2012). Tự
động hóa với WINCC. Nxb Hồng Đức.
[4]. Tài liệu hƣớng dẫn sử dụng hệ thống sản xuất
tại nhà máy bia Hà Nội.
SUMMARY
THE COORDINATION OF THE PROGRAMMABLE LOGIC CONTROLLER
AND HUMAN MACHINE INTERFACE (HMI) IN CONTROL AND MONITOR
BEER FILLING SYSTEMS
Hoang Thi Thuong
*, Vu Thi Oanh
College of Information and Communication Technology – TNU
This paper presents a simulation model of a beer filling system using programmable logic controller
(PLC) and Human-machine interface (HMI). PLCs are used widely in industry, they allow engineers
to implement flexibly complex logic control algorithms through a logic programming language.
Moreover, HMI provides a convenient interface for monitoring and controlling production process
via PC-based software. In this paper, SIEMENS S7-300 for PLC and WINCC version 7.0 for HMI
are used. The different steps in the filling system are discussed and solutions provided by simulation
devices and software to ensure the automation in production process are presented. Finally, the
simulation results are given out to verify the effectiveness of the control and monitor schemes in
increasing productivity, improving quality and ensuring food safety.
Keywords: PLC (programmable logic controller), WINCC, beer filling machine, beer filling
systems, food safety.
Ngày nhận bài: 30/8/2013; Ngày phản biện: 09/9/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: TS. Phạm Đức Long – Trường ĐH CNTT&TT – ĐHTN
* Tel: 01674669347; Email: [email protected]

Hoàng Thị Thƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 37 - 43
44

Mai Trung Thái và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 45 - 52
45
ĐIỀU KHIỂN TỐI ƢU CHO MỘT HỆ CÓ THAM SỐ PHÂN BỐ
SỬ DỤNG PHƢƠNG PHÁP GRADIENT
Mai Trung Thái
*, Nguyễn Thị Mai Hƣơng
Trường ĐH Kỹ thuật Công nghiệp – ĐH Thái Nguyên
TÓM TẮT Bài báo đƣa ra một cách tiếp cận cho bài toán điều khiển tối ƣu cho một hệ có tham số phân bố ổn
định một chiều tuyến tính. Các thuật toán cho hai phƣơng pháp gradient đƣợc đƣa ra, đó là phƣơng
pháp hạ nhanh nhất và phƣơng pháp gradient liên hợp. Các thuật toán này đƣợc áp dụng cho hệ
thống truyền nhiệt một phía trong lò gia nhiệt. Các kết quả tính toán đƣợc đƣa ra đã chứng minh
tính khả thi của hai phƣơng pháp, đặc biệt tính hội tụ nhanh của phƣơng pháp gradient liên hợp.
Từ khoá: Điều khiển tối ưu, phân bố, nhiệt độ, gradient.
GIỚI THIỆU CHUNG*
Điều khiển tối ƣu cho các hệ thống có tham
số phân bố đã đƣợc nghiên cứu từ lâu
[1],[[2],[3],[4], các hệ thống này đƣợc mô tả
bằng phƣơng trình vi phân đạo hàm riêng kết
hợp với phƣơng trình vi phân thƣờng. Bài cáo
nghiên cứu bài toán điều khiển tối ƣu cho một
hệ có tham số phân bố, điển hình đối tƣợng
điều khiển đƣợc mô tả bằng một phƣơng trình
truyền nhiệt. Cách tiếp cận bài toán tối ƣu của
hệ thống có tham số phân bố tuyến tính theo
chuẩn bình phƣơng sai lệch đƣợc đề cập trong
bài báo này, sử dụng phƣơng pháp gradient
trong không gian hàm.
ĐIỀU KHIỂN TỐI ƢU CHO HỆ CÓ THAM
SỐ PHÂN BỐ ỔN ĐỊNH MỘT CHIỀU
TUYẾN TÍNH
Mô tả hệ thống
Xét hệ thống có tham số phân bố ổn định một
chiều tuyến tính. Giả sử hệ thống đƣợc điều
khiển bởi các hàm điều khiển biên tác dụng
trong không gian một chiều. Trạng thái của hệ
đƣợc xác định bằng một hàm trạng thái, cụ
thể đƣợc mô tả bằng phƣơng trình [3]:
0 1 1
0
( , ) ( , ) ( , ) ( ) ( )
t
q x t q x t g x t u d
2 2
0
( , ) ( ) ( )
t
g x t u d (1)
* Tel: 0912.805.540; Email: [email protected]
Trong đó: ( , )q x t là hàm trạng thái phụ thuộc
vào tọa độ không gian x (0 ≤ x ≤ 1) và thời
gian t (0 t T), 1( )u t và
2 ( )u t là các hàm
điều khiển biên giới hạn trong không gian
0x và 1x .
Hệ thống có tham số phân bố một chiều tuyến
tính đƣợc điều khiển bởi các hàm điều khiển
biên nhƣ biểu diễn trong phƣơng trình (1).
Hàm 0 ( , )q x t là hàm trạng thái đƣợc xác định
từ điều kiện đầu tại t=0; g1(x,t); g2(x,t) là các
hàm trọng số của u1(t); u2(t).
Bài toán điều khiển tối ƣu ở đây là xác định
các hàm điều khiển sao cho sự sai lệch giữa
hàm trạng thái và hàm phân bố trong không
gian cho trƣớc của trạng thái tại thời điểm
t=T trong khoảng không gian (0,1) là nhỏ
nhất. Tức là cực tiểu hóa hàm:
1 22
* 2
10 0
( ) ( ) ( , x ( )
T
i i
i
I u q x q x T d C u t dt (2)
Thay q(x,T) từ (1) vào (2), ta có:
21 2
0
10 0
( ) *( ) ( , ) ( , ) ( ) x
T
i i
i
I u q x q x T g x T u d d
22
1 0
( )
T
i i
i
C u t dt (3)
Trong đó: T là thời gian cho trƣớc, q*(x) hàm
phân bố trong không gian cho trƣớc của trạng
thái, C1 và C2 là các hằng số dƣơng. Hàm I(u)
là hàm bậc hai của các hàm điều khiển u1(t)
và u2(t).

Mai Trung Thái và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 45 - 52
46
Bài toán tối thiểu hóa trong không gian
Hilbert
Cho H là không gian Hilbert lấy giá trị thực
2-chiều, tích phân bình phƣơng trong khoảng
(0, T). Mỗi véc tơ điều khiển đƣợc cho bởi:
1
2
( )( )
( )
u tu t
u t đƣợc biểu diễn trong không
gian H và có thể lấy tích phân bình phƣơng
trong khoảng (0, T). Tích số trong của hai
véctơ x(t) và y(t) trong không gian Hilbert H
đƣợc định nghĩa bởi:
0 0
, ( ) ( ) ( ) ( )
T T
T Tx y x t y t dt y t x t dt
Trong đó số mũ T thể hiện véc tơ chuyển vị
hoặc matrận chuyển vị.
Theo [3], phƣơng trình (3) đƣợc đƣa về dạng:
( ) 2 , , ,I u a f u u Lu u Cu (4)
Trong đó: 1
2
0
*( ) ( , ) xoa q x q x T d
1 1 2 2
0
, ( ) ( ) ( ) ( )
T
f u f u f u d
111 12
1 2
21 22 20 0
( )( , ) ( , ), ( ) ( )
( , ) ( , ) ( )
T T uy t y tu Lu u u dt d
y t y t u
22 2 2
1 1 2 2
1 0 0
, ( ) ( ) ( )
T T
i i
i
u Cu C u t dt C u t C u t dt
Khi a là biến độc lập của u(t), hàm thực tế sẽ
đƣợc tối thiểu là:
( ) , 2 ,I u u Ru f u (5)
Trong đó: R=L+C là toán tử xác định dƣơng.
Tìm *
( )u t để cực tiểu hóa hàm I(u) là ta chọn
một véctơ gốc u0(t), chọn một phƣơng z0(t) và
một khoảng ε0 trong phƣơng z0(t) để tính ui(t).
1( ) ( ) ( )i i i iu t u t z t , i=0,1,2… (6)
Khi hàm cần cực tiểu hóa là một hàm bậc 2
của các hàm điều khiển ui(t) (i=1,2), phƣơng
pháp hạ nhanh nhất sẽ đƣợc trình bày ở mục
2.3 là một cách tiếp cận trực tiếp để tối thiểu
hóa phƣơng trình (5).
Phƣơng pháp hạ nhanh nhất (method of
steepest descent-MSD)
Nguyên lý cơ bản của phƣơng pháp này là ta
chọn zi là phƣơng của tốc độ thay đổi lớn nhất
của hàm I(ui ), có nghĩa là phƣơng của
gradient, và chọn εi để I(ui) là cực tiểu, [3].
Khi tìm cực tiểu hàm I(u), giả sử cho trƣớc u0.
Ta sẽ tìm phƣơng của gradient tại điểm này
và tìm một véctơ z sao
cho0/ ( ) 0I u z sẽ đạt giá trị
cực đại. Đặt z0 là một véc tơ. Từ I(u0+εz0) là
một đa thức bậc 2 trong ε, nó sẽ đạt đƣợc cực
tiểu tại giá trị ε0 đã biết. Phần tử u1 = u0 + ε0z0
sẽ đƣợc tính trong phép xấp xỉ tiếp theo, toàn
bộ quá trình có thể đƣợc lặp lại nhiều lần để
đạt đƣợc độ chính xác nhƣ mong muốn. Từ
phƣơng trình (5):
0 0 0 0( ) , 2 ,I u u Ru f u
0 0 0 0( ) , ( ) 2 ,I u z u z R u z f u z
2
0 0( ) 2 , ,I u Ru f z z Rz
Vì vậy, 00
( )I u z=
02 ,Ru f z (7)
Theo bất đẳng thức Schwarz,
, .x y x y
Vì vậy, phƣơng trình (7) sẽ cực đại tại z0 nếu: ''
0 0 0 0 0( )z k Ru f k z
Trong đó: ''
0 0Ru f z và k0 là hằng số tùy
ý. 2
0 0 0 0 0 0 0( ) ( ) 2 , ,I u z I u Ru f z z Rz
sẽ cực tiểu khi:
'' '' '' ''
0 0 0 0 00 0
0 '' '' '' ''0 0 00 0 0 0 0 0
, ,, 1
, z , ,
z k z z zRu f z
z R kk z Rk z z Rz
Do đó: '' '' '' ''
0 0 0 0'' ''
0 0 0 0 0'' '' '' ''0 0 0 0 0
, ,1
, ,
z z z zz k z z
k z Rz z Rz
Ta thấy εz chỉ phụ thuộc vào z, k0 nên có thể
chọn: ''
0 0 0z z Ru f ; 0 0
0
0 0
,
,
z z
z Rz(8)
Thuật toán tính nhƣ sau:

Mai Trung Thái và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 45 - 52
47
1 1
2
1 1 1
1
1 1 1 1
1 1 1
,
, ,
. ; 1, 2..
n n
n n n
n
n n n n
n n n n
z Ru f
z z z
z Rz z Rz
u u z n
(9)
I(u) tại un là:
4
1
1
1 1
( ) ( ), z
n
n n
n n
zI u I u
z R(10)
Theo [3], ta có:
lim ( ) ( ) minnn
I u I u và *
nu u khi
n
Phƣơng pháp hƣớng liên hợp (method of
conjugate gradient- MCG)
Phƣơng pháp này ta chọn phƣơng gradient để
bảo đảm sự hội tụ sau một số bƣớc lặp hữu
hạn. Cho z1,…,zn là chuẩn trong không gian
Ơclit n-nhiều, và *
u là giá trị cực tiểu mong
muốn. Sau đó, nếu u0 là giá trị xấp xỉ đầu tới
giá trị cực tiểu, ta có thể viết, [3],[5]:
1*
0
0
n
j j
j
u u z (11)
Nếu , z 0j iz R khi i ≠ j, thì zj đƣợc gọi là
R-trực giao hoặc R-liên hợp.
Từ phƣơng trình (5),
( ) , ( 2 ,I u u u u R u u f u u
( ) 2 , ,I u Ru f u u R u
Vì vậy,
( ) ( ) 2 , ,I u u I u Ru f u u R u
,u R u xác định dƣơng, nên:
( ) ( ) 0I u u I u tại u = 0 nếu *
Ru f
Từ phƣơng trình (11),
1*
0
0
( )n
j j
j
R u u R z
và *
0, ( ) , zj j j jz R u u z R
Ta có:
*
00
, ( ), )
, z , z
jj
j
j j j j
z R u uz f Ru
z R z R
Từ phƣơng trình (8), độ dốc (gradient) âm tại
u0 là 0 0z f Ru , vì vậy,
0,
,
j
j
j j
z z
z Rz; j = 0,1,…,n-1 (12)
và εj đƣợc tính toán dễ hơn từ phƣơng trình
này.
Nguyên tắc cơ bản của phƣơng pháp MCG là
tạo ra chuỗi jz các véctơ R-liên hợp, tính
giá trị εj trong phƣơng trình (12), từ đó tính
đƣợc giá trị *
u .
Để tạo ra tập các véctơ R-trực giao, giả sử ta
có tập véctơ 0 1 1, ,... np p p . Sử dụng phƣơng
pháp trực giao Gram-Schmidt để tính toán.
0 0z p ;1 1 1,
1
i
i i i k k
k
z p z ; 0,1,..., 2i n
Trong đó: 1
1,
,
, z
k i
i k
k k
z Rp
z R. Do pi là độc
lập tuyến tính, nên pi = zi. Do đó ta chọn
chuỗiip . Ta định nghĩa ui:
1
0
0
i
i j j
j
u u z ; j=1,2,…,n;jtính bởi (12)
Vì vậy, 1i i i iu u u z ; i=0,1,…,n-1
Đặt: i if Ru ; i=0,1,…,n-1
Nguyên tắc cơ bản của phƣơng pháp MCG là
chọn i ip , i=0,1,…,n-1
Chứng minh rằng chuỗi i không kết thúc
trƣớc i=n, ta có lời giải. Đã chứng minh đƣợc
rằng: 1( ) ( )i iI u I u ,
Thuật toán chung để tính toán nhƣ sau: cho
trƣớc u0(t)

Mai Trung Thái và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 45 - 52
48
0 0
0 0 0 0
0 0
0 0
( ), ( )( ) ( ) ( ) ( );
( ), ( )
( ) ( ) . ( )i o
z t tz t t f t Ru t
z t Rz t
u t u t z t
(13)
1
1
1 1
1 1 1
1 1
2 1 1 1
( ), ( )( ) ( ) ( );
( ), ( )
( ), ( )( ) ( ) . ( );
( ), ( )
( ) ( ) . ( ); 0,1,..., 2
i i
i i i i i
i i
i i
i i i i i
i i
i i i i
z t R tt t Rz t
z t Rz t
z t tz t t z t
z t Rz t
u t u t z t i n
(14)
Từ phƣơng trình (12-14), ta suy ra: *
nu u
Từ phƣơng trình (14) cho i>n-2, sau đó là
1i i với mọi i (
*
i iu u ), cho đến
khi làm tròn kết quả sau mỗi phép lặp.
Ƣu điểm của phƣơng pháp MCG là nó có thể
hội tụ hoặc rất gần hội tụ, giải đúng sau một
số phép lặp, điều này sẽ làm giảm số lần tính
toán.
ÁP DỤNG PHƢƠNG PHÁP GRADIENT
CHO HỆ THỐNG DẪN NHIỆT
Mô tả hệ thống
Quá trình đốt nóng 1 phía của kim loại trong
lò nung đƣợc mô tả bằng phƣơng trình dẫn
nhiệt [2], [3]:
2
2
( , ) ( , )q x t q x t
x t (15)
Các điều kiện đầu và điều kiện biên cho bởi
[2], [3]:
( ,0) 0q x (16)
0
( , )(0, ) ( )x
q x tq t u t
x (17)
1
( , )0x
q x t
x (18)
Ở đây: q(x,t) là phân bố nhiệt độ trong kim
loại, phụ thuộc vào toạ độ không gian x với (0
x 1) và thời gian t với (0 t T). T là thời
gian nung cho phép;
là hệ số trao đổi nhiệt, giả sử là hằng số; u(t)
là nhiệt độ môi trƣờng không khí trong lò.
Bài toán điều khiển tối ƣu ở đây là tìm 1 hàm
điều khiển u(t) (0 t T) sao cho cực tiểu
hoá sai lệch nhiệt độ giữa phân bố nhiệt độ
mong muốn q*(x) với nhiệt độ thực của vật tại
thời điểm t = T cho trƣớc: q (x,T). Tức là :
12
0
( ) *( ) ( , ) minI u t q x q x T dx (19)
Nhƣ vậy, trong hàm mục tiêu cần cực tiểu thì
q*(x) là cho trƣớc, còn q(x,T) là hàm chƣa
biết. Rõ ràng q(x,T) là giá trị hàm q(x,t) tại
thời điểm t=T. Hàm q(x,t) là nghiệm của
phƣơng trình vi phân (15) với các điều kiện
đầu và điều kiện biên (16), (17), (18); hàm
q(x,t) sau khi tính đƣợc chắc chắn phải phụ
thuộc vào nhiệt độ lò u(t).
Nhiệt độ lò u(t) đƣợc điều khiển bởi công suất
lò w(t). Ngoài ra, sự phân bố nhiệt độ trong
kim loại lại đƣợc điều khiển bởi nhiệt độ môi
trƣờng không khí trong lò, tức là phụ thuộc
vào công suất cung cấp cho lò w(t). Giả sử lò
là khâu quán tính bậc nhất, có trễ, lúc này
quan hệ giữa w(t) và u(t) đƣợc biểu diễn theo
phƣơng trình.
( )( ) w( )
du tu t t
dt(20)
Trong đó :
là hằng số thời gian của lò
(t) là công suất cung cấp cho lò
Để giải phƣơng trình đạo hàm riêng (15) với các điều kiện đầu và biên (16), (17) ,(18) ta áp dụng phép biến đổi Laplace. Khi áp dụng phép biến đổi Laplace với tham số thời gian t thì phƣơng trình vi phân đạo hàm riêng đã đƣợc đƣa về phƣơng trình vi phân thƣờng đối với biến x.
Quá trình biến đổi, theo [2], [3], ta đƣợc :
22 os (1 )
( , )
cos sin
k tk c k xg x t e
kk k
22
1 2 2
cos(1 )2
1 1( ) os
i ti
i
i i
i
xk e
k c
(21)
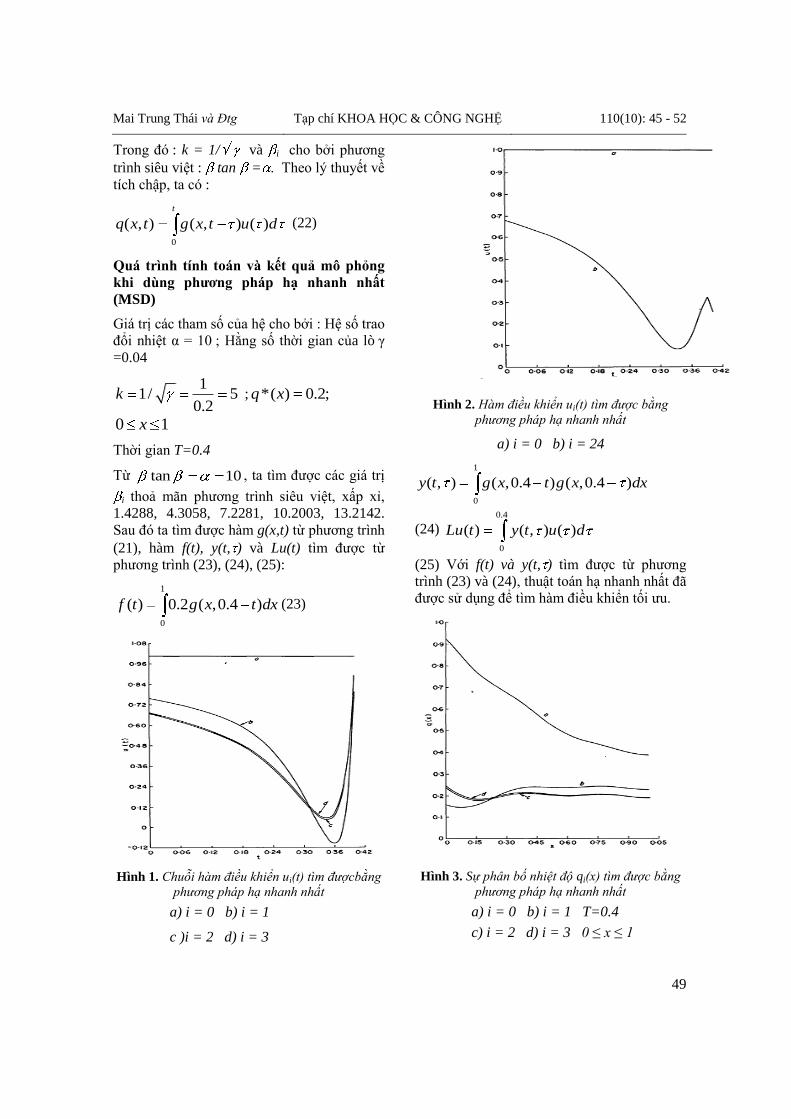
Mai Trung Thái và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 45 - 52
49
Trong đó : k = 1/ và i cho bởi phƣơng
trình siêu việt : tan = . Theo lý thuyết về
tích chập, ta có :
0
( , ) ( , ) ( )
t
q x t g x t u d (22)
Quá trình tính toán và kết quả mô phỏng
khi dùng phƣơng pháp hạ nhanh nhất
(MSD)
Giá trị các tham số của hệ cho bởi : Hệ số trao
đổi nhiệt α = 10 ; Hằng số thời gian của lò γ
=0.04
11/ 5
0.2k ; *( ) 0.2;q x
0 1x
Thời gian T=0.4
Từ tan 10 , ta tìm đƣợc các giá trị
i thoả mãn phƣơng trình siêu việt, xấp xỉ,
1.4288, 4.3058, 7.2281, 10.2003, 13.2142.
Sau đó ta tìm đƣợc hàm g(x,t) từ phƣơng trình
(21), hàm f(t), y(t, ) và Lu(t) tìm đƣợc từ
phƣơng trình (23), (24), (25):
1
0
( ) 0.2 ( ,0.4 )f t g x t dx (23)
Hình 1. Chuỗi hàm điều khiển ui(t) tìm đượcbằng
phương pháp hạ nhanh nhất
a) i = 0 b) i = 1
c )i = 2 d) i = 3
Hình 2. Hàm điều khiển ui(t) tìm được bằng
phương pháp hạ nhanh nhất
a) i = 0 b) i = 24
1
0
( , ) ( ,0.4 ) ( ,0.4 )y t g x t g x dx
(24) 0.4
0
( ) ( , ) ( )Lu t y t u d
(25) Với f(t) và y(t, ) tìm đƣợc từ phƣơng
trình (23) và (24), thuật toán hạ nhanh nhất đã
đƣợc sử dụng để tìm hàm điều khiển tối ƣu.
Hình 3. Sự phân bố nhiệt độ qi(x) tìm được bằng
phương pháp hạ nhanh nhất
a) i = 0 b) i = 1 T=0.4
c) i = 2 d) i = 3 0 ≤ x ≤ 1
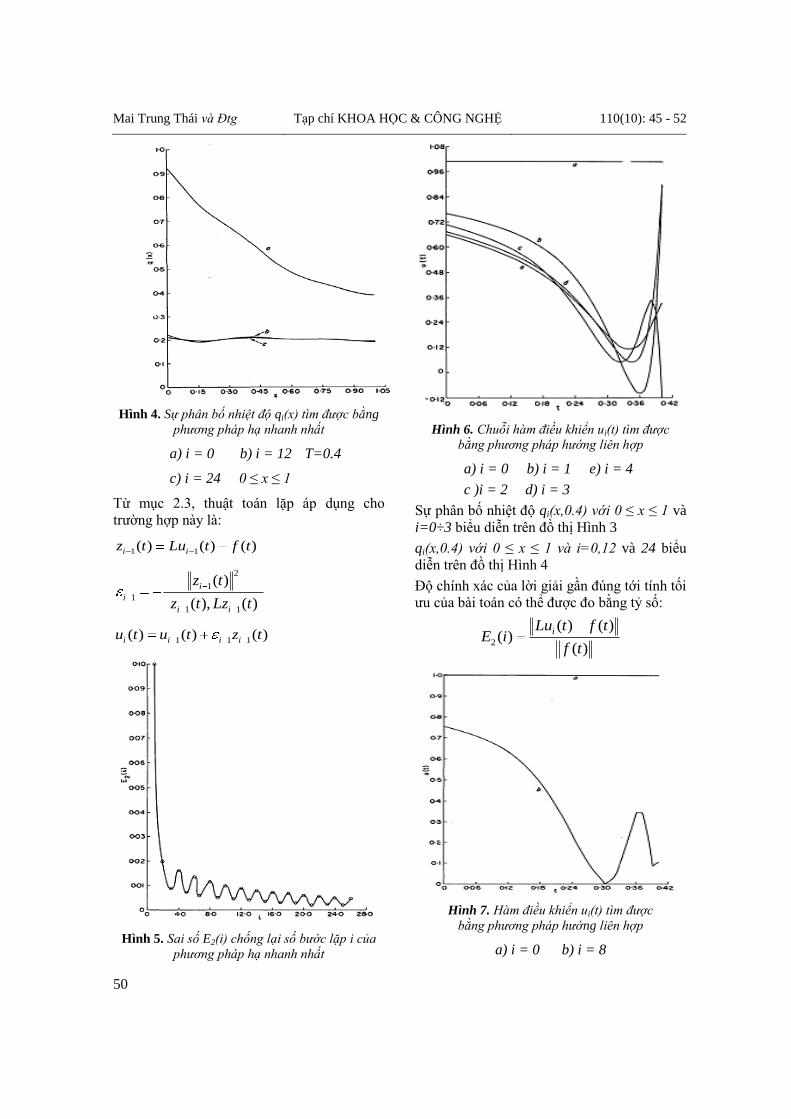
Mai Trung Thái và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 45 - 52
50
Hình 4. Sự phân bố nhiệt độ qi(x) tìm được bằng
phương pháp hạ nhanh nhất
a) i = 0 b) i = 12 T=0.4
c) i = 24 0 ≤ x ≤ 1
Từ mục 2.3, thuật toán lặp áp dụng cho
trƣờng hợp này là:
1 1( ) ( ) ( )i iz t Lu t f t
2
1
1
1 1
( )
( ), ( )
i
i
i i
z t
z t Lz t
1 1 1( ) ( ) ( )i i i iu t u t z t
Hình 5. Sai số E2(i) chống lại số bước lặp i của
phương pháp hạ nhanh nhất
Hình 6. Chuỗi hàm điều khiển ui(t) tìm được
bằng phương pháp hướng liên hợp
a) i = 0 b) i = 1 e) i = 4
c )i = 2 d) i = 3
Sự phân bố nhiệt độ qi(x,0.4) với 0 ≤ x ≤ 1 và
i=0÷3 biểu diễn trên đồ thị Hình 3
qi(x,0.4) với 0 ≤ x ≤ 1 và i=0,12 và 24 biểu
diễn trên đồ thị Hình 4
Độ chính xác của lời giải gần đúng tới tính tối
ƣu của bài toán có thể đƣợc đo bằng tỷ số:
2
( ) ( )( )
( )
iLu t f tE i
f t
Hình 7. Hàm điều khiển ui(t) tìm được
bằng phương pháp hướng liên hợp
a) i = 0 b) i = 8
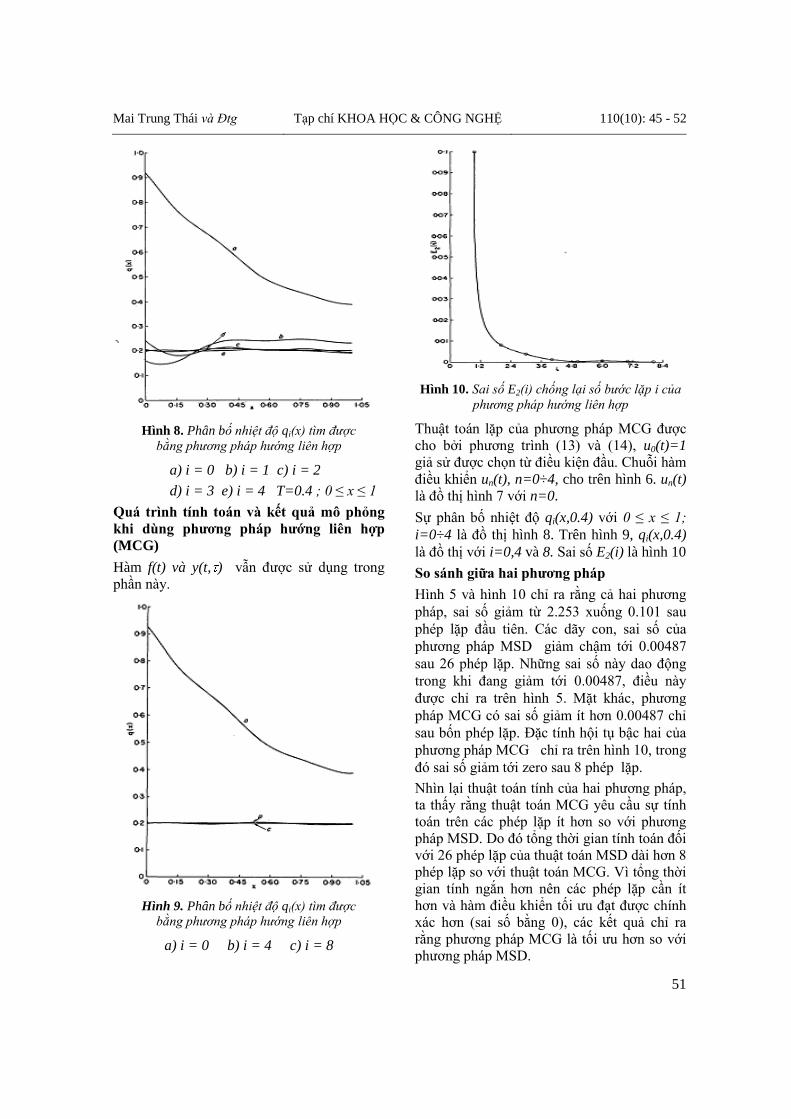
Mai Trung Thái và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 45 - 52
51
Hình 8. Phân bố nhiệt độ qi(x) tìm được
bằng phương pháp hướng liên hợp
a) i = 0 b) i = 1 c) i = 2
d) i = 3 e) i = 4 T=0.4 ; 0 ≤ x ≤ 1
Quá trình tính toán và kết quả mô phỏng
khi dùng phƣơng pháp hƣớng liên hợp
(MCG)
Hàm f(t) và y(t, ) vẫn đƣợc sử dụng trong
phần này.
Hình 9. Phân bố nhiệt độ qi(x) tìm được
bằng phương pháp hướng liên hợp
a) i = 0 b) i = 4 c) i = 8
Hình 10. Sai số E2(i) chống lại số bước lặp i của
phương pháp hướng liên hợp
Thuật toán lặp của phƣơng pháp MCG đƣợc
cho bởi phƣơng trình (13) và (14), u0(t)=1
giả sử đƣợc chọn từ điều kiện đầu. Chuỗi hàm
điều khiển un(t), n=0÷4, cho trên hình 6. un(t)
là đồ thị hình 7 với n=0.
Sự phân bố nhiệt độ qi(x,0.4) với 0 ≤ x ≤ 1;
i=0÷4 là đồ thị hình 8. Trên hình 9, qi(x,0.4)
là đồ thị với i=0,4 và 8. Sai số E2(i) là hình 10
So sánh giữa hai phƣơng pháp
Hình 5 và hình 10 chỉ ra rằng cả hai phƣơng
pháp, sai số giảm từ 2.253 xuống 0.101 sau
phép lặp đầu tiên. Các dãy con, sai số của
phƣơng pháp MSD giảm chậm tới 0.00487
sau 26 phép lặp. Những sai số này dao động
trong khi đang giảm tới 0.00487, điều này
đƣợc chỉ ra trên hình 5. Mặt khác, phƣơng
pháp MCG có sai số giảm ít hơn 0.00487 chỉ
sau bốn phép lặp. Đặc tính hội tụ bậc hai của
phƣơng pháp MCG chỉ ra trên hình 10, trong
đó sai số giảm tới zero sau 8 phép lặp.
Nhìn lại thuật toán tính của hai phƣơng pháp,
ta thấy rằng thuật toán MCG yêu cầu sự tính
toán trên các phép lặp ít hơn so với phƣơng
pháp MSD. Do đó tổng thời gian tính toán đối
với 26 phép lặp của thuật toán MSD dài hơn 8
phép lặp so với thuật toán MCG. Vì tổng thời
gian tính ngắn hơn nên các phép lặp cần ít
hơn và hàm điều khiển tối ƣu đạt đƣợc chính
xác hơn (sai số bằng 0), các kết quả chỉ ra
rằng phƣơng pháp MCG là tối ƣu hơn so với
phƣơng pháp MSD.

Mai Trung Thái và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 45 - 52
52
KẾT LUẬN
Các thuật toán trình bày ở trên để tính hàm
điều khiển tối ƣu cho hệ thống có tham số
phân bố, ổn định 1 chiều tuyến tính theo
chuẩn bình phƣơng sai lệch. Áp dụng các
thuật toán này để giải một hệ thống dẫn nhiệt
trong kim loại. Các kết quả tính toán đƣa ra
chỉ ra rằng tính hội tụ của phƣơng pháp MCG
sau một số phép lặp hữu hạn. Tổng thời gian
tính toán và số phép lặp của phƣơng pháp
MCG đƣợc đƣa ra là ít hơn so với phƣơng
pháp MSD.
TÀI LIỆU THAM KHẢO
[1]. Cong N Huu; Nam N Hoai: “Optimal control
for a distributed parameter and delayed – time
system based on the numerical method”
International conference on Control, Automotion,
Robotics and vision (ICARCV-2008).
[2]. SAKAWA, Y.: "Solution of an optimal control
problem in a distributed parameter system”, Trans.
IEEE, 1964, AC-9, pp. 420-426
[3]. H.E.Lee, M.S “Optimal Control of a class of
distributed parameter system using gradient
methods”. PROC. IEEE, Vol.116, No.7, July 1969.
[4]. WANG, P. K. C, and TUNG, F.: "Optimal
control of distributed parameter systems", Trans.
ASME, 1964, 86 – D, pp. 67-79.
[5]. LASDON, L. S; MITTER, S. K, and
WARREN, A.D: “The conjugate gradient method
for optimal control problem”, Trans. IEEE, 1967,
AC-12, pp. 132-138.
SUMMARY
OPTIMAL CONTROL OF A CLASS OF DISTRIBUTED PARAMETER SYSTEMS
USING GRADIENT METHODS
Mai Trung Thai
*, Nguyen Thi Mai Huong College of Technology – TNU
This paper presents a practical approach to the problem of optimal control in one-sided, linear,
stationary, distributed parameter systems. Algorithms for two gradient methods, namely, the
steepest-descent method and the conjugate-gradient method. These algorithms are applied to a
specific one-sided heat-conduction system in heating furnace. The computational results clearly
demonstrate the feasibility of both methods, in particular, the accelerated convergence of the
conjugate gradient method.
Keywords: Optimal control, Distributed, Temperature, Gradient.
Ngày nhận bài: 15/7/2013; Ngày phản biện: 23/8/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: TS. Nguyễn Hoài Nam – Trường ĐH Kỹ thuật Công nghiệp – ĐHTN
* Tel: 0912805540; Email: [email protected]
Hà Thanh Tùng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 53 - 58
53
MỘT PHƢƠNG PHÁP NÂNG CAO ĐỘ TIN CẬY LƢỚI ĐIỆN PHÂN PHỐI
THÀNH PHỐ THÁI NGUYÊN SỬ DỤNG CÁC THIẾT BỊ TỰ ĐỘNG HÓA DAS
(DISTRIBUTION AUTOMATINON SYSTEM)
Hà Thanh Tùng
1,*, Phạm Thị Hồng Anh
2
1Trường Đại học Kỹ thuật Công nghiệp – ĐH Thái Nguyên 2Trường Đại học Công nghệ thông tin và truyền thông – ĐH Thái Nguyên
TÓM TẮT Bảo đảm chất lƣợng điện năng, cung cấp dịch vụ điện với chất lƣợng ngày càng cao, liên tục, an
toàn và hiệu quả luôn là mối quan tâm thƣờng xuyên và cấp thiết đối với ngành điện. Trong đó độ
tin cậy lƣới điện là một trong những chỉ tiêu quan trọng để đánh giá lƣới điện. Lƣới điện phân phối
là khâu trực tiếp đƣa điện năng đến hộ tiêu dùng, vì vậy tính liên tục cung cấp điện cho phụ tải phụ
thuộc trực tiếp vào độ tin cậy của lƣới điện này. Độ tin cậy của lƣới phân phối có thể đƣợc đánh
giá qua nhiều chỉ tiêu khác nhau, trong đó các chỉ tiêu đánh giá theo tiêu chuẩn IEEE-1366 đƣợc
ứng dụng phổ biến trên thế giới.
Bài báo giới thiệu các chỉ tiêu đánh giá độ tin cậy cho lƣới phân phối theo tiêu chuẩn IEEE – 1366.
Đồng thời sử dụng phần mềm PSS/ADEPT để xác định các chỉ tiêu nói trên cho lƣới điện phân
phối thành phố Thái Nguyên trƣớc và sau khi trang bị hệ thống tự động hóa DAS (Distribution
Automation System) nhằm định lƣợng tính liên tục cấp điện cho khách hàng.
Từ khóa: Độ tin cậy, lưới phân phối, chất lượng điện năng, DASl, cung cấp điện.
ĐẶT VẤN ĐỀ*
Cũng nhƣ nhiều đô thị khác, thời gian vừa
qua, số lƣợng hộ tiêu thụ tại thành phố Thái
Nguyên tăng lên nhanh chóng và ngày càng
đòi hỏi cao về chất lƣợng cũng nhƣ độ tin cậy
cung cấp điện [1]. Hiện nay, yêu cầu đảm bảo
chất lƣợng cung cấp điện đối với các Công ty
Điện lực ngày càng nghiêm ngặt [5]. Chất
lƣợng cung cấp điện, ngoài các yêu cầu về
điện áp, tần số còn có yêu cầu về tính liên tục
cung cấp điện cho khách hàng. Theo xu thế
hội nhập với thế giới, các Công ty Điện lực
Việt Nam cần phải đƣa ra các cam kết có tính
định lƣợng về tính liên tục cung cấp điện đối
với khách hàng, đặc biệt là các nhà đầu tƣ
nƣớc ngoài. Định lƣợng tính liên tục cung cấp
điện đƣợc thể hiện ở các chỉ tiêu tần suất
ngừng cấp điện bình quân và tổng số giờ
ngừng cấp điện bình quân của khách hàng
trong khoảng thời gian nhất định (thƣờng
chọn một năm). Lƣới điện phân phối trung áp
tại thành phố Thái Nguyên hiện nay có cấp
điện áp là 22, 35 kV, phân phối điện cho các
* Tel: 0913789858; Email: [email protected]
trạm phân phối trung áp/hạ áp và phụ tải
trung áp. Các hộ phụ tải nhận điện trực tiếp
thông qua các trạm biến áp phân phối, nên khi
xảy ra bất kỳ sự cố nào trong lƣới điện và
trạm biến áp phân phối đều ảnh hƣởng trực
tiếp đến các hộ tiêu thụ. Để nâng cao đƣợc độ
tin cậy và tính liên tục cung cấp điện, cũng
nhƣ dự phòng hợp lý, bài báo tập trung chủ
yếu vào nghiên cứu, tính toán độ tin cậy của
lƣới điện phân phối theo tiêu chuẩn
IEEE1366, từ đó đề xuất áp dụng một số
thiết bị DAS, nhằm nâng cao độ tin cậy cung
cấp điện trên lƣới điện phân phối của thành
phố Thái Nguyên.
ĐỘ TIN CẬY VÀ CÁC CHỈ TIÊU THEO
TIÊU CHUẨN IEEE-1366
Độ tin cậy là xác suất để đối tƣợng (hệ thống
hay phần tử) hoàn thành nhiệm vụ chức năng
cho trƣớc, duy trì đƣợc giá trị các thông số
làm việc đã đƣợc thiết lập trong một giới
hạn, ở một thời điểm nhất định, trong những
điều kiện làm việc nhất định. Theo đó các
chỉ tiêu độ tin cậy theo tiêu chuẩn IEEE
1366 [9] bao gồm:

Hà Thanh Tùng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 53 - 58
54
Chỉ tiêu tần suất ngừng cấp điện trung
bình hệ thống (SAIFI)
Cho biết trung bình một khách hàng bị ngừng
cấp điện vĩnh cửu bao nhiêu lần trong thời kỳ
báo cáo (thƣờng là trong một năm).
NC
NI
NC
NSAIFI
i= Tổng số lần mất
điện khách hàng của hệ thống / tổng số khách
hàng của hệ thống.
Chỉ tiêu thời gian ngừng cấp điện trung
bình hệ thống(SAIDI)
Cho biết trung bình một khách hàng bị ngừng
cấp điện vĩnh cửu bao nhiêu giờ trong kỳ báo
cáo. NC
TI
NC
NrSAIDI
ii
= Tổng số giờ mất
điện khách hàng của hệ thống / tổng số khách
hàng của hệ thống.
Chỉ tiêu thời gian ngừng cấp điện trung
bình của khách hàng (CAIDI)
Cho biết thời gian trung bình khôi phục cấp
điện cho khách hàng.
SAIFI
SAIDI
N
NrCAIDI
i
ii
= Tổng số giờ
mất điện khách hàng của hệ thống / tổng số
khách hàng bị ngừng cấp điện. (3)
Chỉ tiêu sẵn sàng cung cấp điện trung bình
(ASAI): Cho biết phần trăm về thời gian
khách hàng đƣợc cấp điện so với tổng số giờ
khách hàng yêu cầu.
( ))/(*
/* ∑namsogioNC
NrnamSogioNCASAI
ii-= = Số
giờ sẵn sàng cấp điện/tổng số giờ khách hàng
yêu cầu. (4)
Năng lƣợng không đƣợc cung cấp- ENS
ENS = Tổng số điện năng không đƣợc cung
cấp bởi hệ thống =∑ Pi Ti (5)
Ở đây Pi là tải trung bình đƣợc nối vào nút
tải thứ i. Chỉ tiêu này xác định sản lƣợng điện
bị mất đối với hệ thống trong một năm.
Điện năng trung bình không đƣợc cung
cấp- AEN
AENS=∑∑ .
i
ii
N
TP (6)
Tổng điện năng không cung cấp được /Tổng
số khách hàng được phục vụ. Chỉ tiêu này xác
định sản lượng điện bị mất trung bình đối với
một khách hàng trong một năm.
THIẾT BỊ TỰ ĐỘNG HÓA
(DAS DISTRIBUTION AUTOMATION SYSTEM)
Bài báo giới thiệu một số thiết bị DAS bắt
đầu đƣợc áp dụng tại Việt Nam bao gồm:
thiết bị đóng lặp lại tự động Autoreclosers và
dao cách ly tự động.
Recloser
Phần lớn sự cố trong hệ thống phân phối điện
là sự cố thoáng qua. Vì vậy, để tăng cƣờng độ
liên tục cung cấp điện cho phụ tải, thay vì sử
dụng máy cắt ngƣời ta sử dụng máy cắt
thƣờng đóng lại (Recloser). Thực chất máy
cắt tự đóng lại là máy cắt có kèm thêm bộ
điều khiển cho phép ngƣời ta lập trình số lần
đóng cắt lập đi lập lại theo yêu cầu đặt trƣớc.
Đồng thời đo và lƣu trữ 1 số đại lƣợng cần
thiết nhƣ: U, I, P, thời điểm xuất hiện ngắn
mạch. Khi xuất hiện ngắn mạch Recloser mở
ra (cắt mạch) sau một thời gian t1 nó sẽ tự
đóng mạch. Nếu sự cố còn tồn tại nó sẽ cắt
mạch, sau thời gian t2, Recloser sẽ tự đóng lại
mạch. Và nếu sự cố vẫn còn tồn tại nó sẽ lại
cắt mạch và sau thời gian t3 nó sẽ tự đóng lại
mạch một lần nữa và nếu sự cố vẫn còn tồn
tại thì lần này Recloser sẽ cắt mạch luôn. Số
lần và thời gian Recloser đóng cắt do ngƣời
vận hành lập.
Phạm vi ứng dụng:
Recloser thƣờng đƣợc trang bị cho những
đƣờng trục chính công suất lớn và đƣờng dây
dài đắt tiền.
Ngoài ra thiết bị trên còn cho phép các nhà kỹ
thuật theo dõi một cách tin cậy nhất các tình
trạng tác động của thiết bị, tình trạng hoạt
động của phụ tải trong một khoảng thời gian
lớn, nhờ vào bộ phận lƣu trữ dữ liệu sự cố, tin
cậy đảm bảo thông tin không bị mất đi khi
xảy ra bất cứ trƣờng hợp nào.
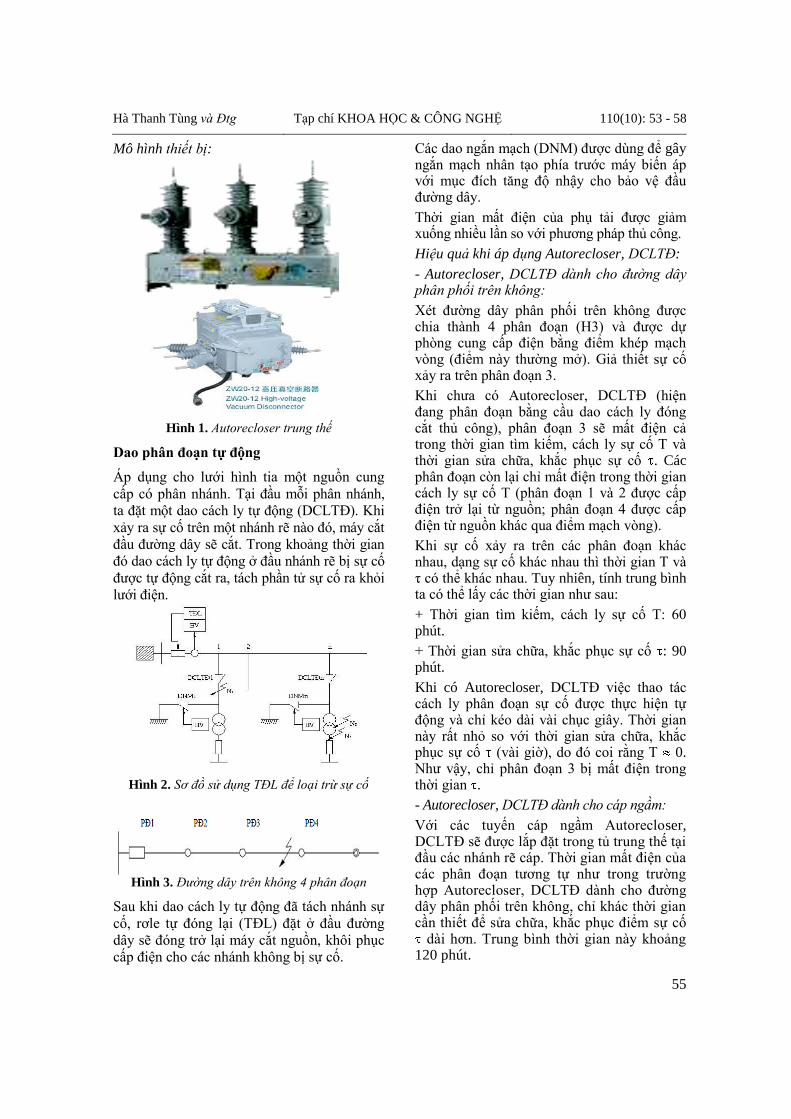
Hà Thanh Tùng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 53 - 58
55
Mô hình thiết bị:
Hình 1. Autorecloser trung thế
Dao phân đoạn tự động
Áp dụng cho lƣới hình tia một nguồn cung
cấp có phân nhánh. Tại đầu mỗi phân nhánh,
ta đặt một dao cách ly tự động (DCLTĐ). Khi
xảy ra sự cố trên một nhánh rẽ nào đó, máy cắt
đầu đƣờng dây sẽ cắt. Trong khoảng thời gian
đó dao cách ly tự động ở đầu nhánh rẽ bị sự cố
đƣợc tự động cắt ra, tách phần tử sự cố ra khỏi
lƣới điện.
Hình 2. Sơ đồ sử dụng TĐL để loại trừ sự cố
Hình 3. Đường dây trên không 4 phân đoạn
Sau khi dao cách ly tự động đã tách nhánh sự
cố, rơle tự đóng lại (TĐL) đặt ở đầu đƣờng
dây sẽ đóng trở lại máy cắt nguồn, khôi phục
cấp điện cho các nhánh không bị sự cố.
Các dao ngắn mạch (DNM) đƣợc dùng để gây ngắn mạch nhân tạo phía trƣớc máy biến áp với mục đích tăng độ nhậy cho bảo vệ đầu đƣờng dây.
Thời gian mất điện của phụ tải đƣợc giảm xuống nhiều lần so với phƣơng pháp thủ công.
Hiệu quả khi áp dụng Autorecloser, DCLTĐ:
- Autorecloser, DCLTĐ dành cho đường dây phân phối trên không:
Xét đƣờng dây phân phối trên không đƣợc chia thành 4 phân đoạn (H3) và đƣợc dự phòng cung cấp điện bằng điểm khép mạch vòng (điểm này thƣờng mở). Giả thiết sự cố xảy ra trên phân đoạn 3.
Khi chƣa có Autorecloser, DCLTĐ (hiện đang phân đoạn bằng cầu dao cách ly đóng cắt thủ công), phân đoạn 3 sẽ mất điện cả trong thời gian tìm kiếm, cách ly sự cố T và thời gian sửa chữa, khắc phục sự cố . Các phân đoạn còn lại chỉ mất điện trong thời gian cách ly sự cố T (phân đoạn 1 và 2 đƣợc cấp điện trở lại từ nguồn; phân đoạn 4 đƣợc cấp điện từ nguồn khác qua điểm mạch vòng).
Khi sự cố xảy ra trên các phân đoạn khác nhau, dạng sự cố khác nhau thì thời gian T và τ có thể khác nhau. Tuy nhiên, tính trung bình ta có thể lấy các thời gian nhƣ sau:
+ Thời gian tìm kiếm, cách ly sự cố T: 60 phút.
+ Thời gian sửa chữa, khắc phục sự cố : 90 phút.
Khi có Autorecloser, DCLTĐ việc thao tác cách ly phân đoạn sự cố đƣợc thực hiện tự động và chỉ kéo dài vài chục giây. Thời gian này rất nhỏ so với thời gian sửa chữa, khắc phục sự cố (vài giờ), do đó coi rằng T 0. Nhƣ vậy, chỉ phân đoạn 3 bị mất điện trong thời gian .
- Autorecloser, DCLTĐ dành cho cáp ngầm:
Với các tuyến cáp ngầm Autorecloser, DCLTĐ sẽ đƣợc lắp đặt trong tủ trung thế tại đầu các nhánh rẽ cáp. Thời gian mất điện của các phân đoạn tƣơng tự nhƣ trong trƣờng hợp Autorecloser, DCLTĐ dành cho đƣờng dây phân phối trên không, chỉ khác thời gian cần thiết để sửa chữa, khắc phục điểm sự cố dài hơn. Trung bình thời gian này khoảng
120 phút.

Hà Thanh Tùng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 53 - 58
56
TÍNH TOÁN ÁP DỤNG ĐỐI VỚI ĐƢỜNG
DÂY MẠCH VÕNG 471- E6.2 + 472- E6.4
Kết quả tính toán sử dụng phần mềm
PSS/ADEPT (Power System Simulator/
Avanner Distribution Enginering) công cụ mô
phỏng lƣới điện phân phối đƣợc thiết kế cho
các kỹ sƣ, cán bộ kỹ thuật những ngƣời làm
công tác thiết kế, vận hành lƣới điện phân
phối [6].
Phụ tải của đƣờng dây đang nghiên cứu hầu
hết là các phụ tải quan trọng, thuộc loại I và
loại II nhƣ Bệnh viện Mắt, bệnh viện trƣờng
Y, các trƣờng học, bến xe… Hiện nay trên
toàn tuyến đang trang bị, lắp đặt 6 cầu dao
phân đoạn đóng cắt thủ công, các cầu dao này
đều là các cầu dao đầu nguồn, đầu các nhánh
rẽ. Vì vậy để có thể thấy rõ ƣu, nhƣợc điểm
khi tiến hành lắp đặt Autorecloser, DCLTĐ so
với cầu dao phân đoạn đóng cắt thủ công ta sẽ
tiến hành lắp đặt Autorecloser, DCLTĐ tại
các vị trí cột đầu nguồn và cột đầu tiên của
các nhánh rẽ (thay cho các vị trí cầu dao phân
đoạn đóng cắt thủ công nêu trên), dựa trên
tiêu chí đó ta có các vị trí lắp đặt các thiết bị
nhƣ sau:
Tại vị trí cột 05 đƣờng dây 472- E6.4: Lắp 01
bộ DCLTĐ; Tại vị trí cột 56 đƣờng dây 472-
E6.4: Lắp 01 bộ DCLTĐ; Tại vị trí cột 62
đƣờng dây 471- E6.2: Lắp 01 bộ DCLTĐ; Tại
vị trí cột 02 đƣờng dây 471- E6.2: Lắp 01 bộ
DCLTĐ; Tại cột 34 đƣờng dây 472- E6.4:
Lắp 01 Autorecloser; Tại cột 10 đƣờng dây
471- E6.2: Lắp 01 Autorecloser
Với các vị trí lắp đặt nhƣ trên ta có các phân
đoạn sau: Phân đoạn 1 từ cột 05 đến cột 34;
Phân đoạn 2 từ cột 2 đến cột 62; Phân đoạn 3
từ cột 62 đến cột 14 nhánh rẽ đi TBA Sƣ
Phạm 1; Phân đoạn 4 từ cột 56 đến cột 34’
đƣờng dây 472- E6. (trong phân đoạn đang có
01 dao cách ly lắp tại cột 46).
Công suất trung bình và chiều dài đƣờng trục
các phân đoạn đƣợc trình bày trong bảng 1.
Bảng 1. Thông số các phân đoạn
Phân đoạn
Công suất
trung bình
(kW)
Chiều dài
(km)
1 2195.211 13.07
2 1092.884 5.15
3 883.547 7.42
4 3936.757 20.35
Hình 4. Sơ đồ 1 sợi đường dây mạch vòng
471- E6.2 + 472- E6.4 khi chưa lắp đặt
Autorecloser và DCLTĐ mô phỏng trên
PSS/ADEPT
Hình 5. Sơ đồ 1 sợi đường dây mạch vòng 471-
E6.2 + 472- E6.4 sau khi lắp đặt Autorecloser và
DCLTĐ
Bảng 2. Các thông số của hệ thống
Các
chỉ tiêu SAIFI SAIDI CAIFI CAIDI
Sự cố 1 5 1 4
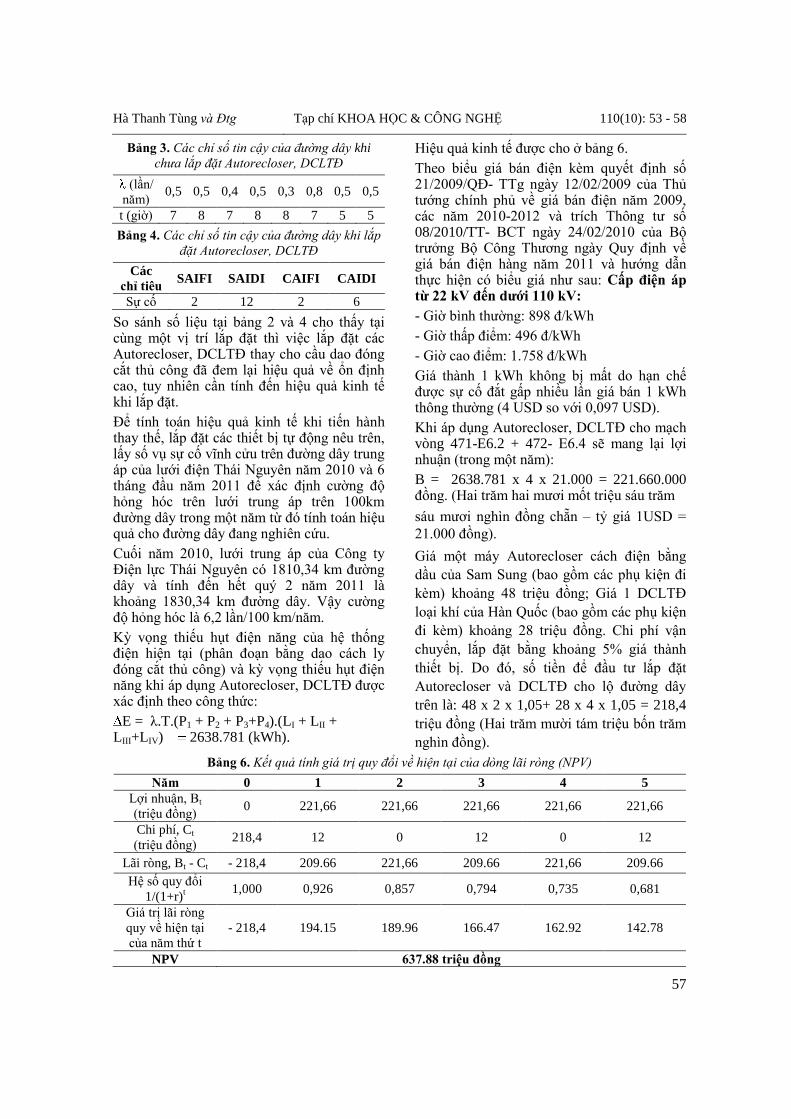
Hà Thanh Tùng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 53 - 58
57
Bảng 3. Các chỉ số tin cậy của đường dây khi
chưa lắp đặt Autorecloser, DCLTĐ
(lần/
năm) 0,5 0,5 0,4 0,5 0,3 0,8 0,5 0,5
t (giờ) 7 8 7 8 8 7 5 5
Bảng 4. Các chỉ số tin cậy của đường dây khi lắp
đặt Autorecloser, DCLTĐ
Các
chỉ tiêu SAIFI SAIDI CAIFI CAIDI
Sự cố 2 12 2 6
So sánh số liệu tại bảng 2 và 4 cho thấy tại cùng một vị trí lắp đặt thì việc lắp đặt các Autorecloser, DCLTĐ thay cho cầu dao đóng cắt thủ công đã đem lại hiệu quả về ổn định cao, tuy nhiên cần tính đến hiệu quả kinh tế khi lắp đặt.
Để tính toán hiệu quả kinh tế khi tiến hành thay thế, lắp đặt các thiết bị tự động nêu trên, lấy số vụ sự cố vĩnh cửu trên đƣờng dây trung áp của lƣới điện Thái Nguyên năm 2010 và 6 tháng đầu năm 2011 để xác định cƣờng độ hỏng hóc trên lƣới trung áp trên 100km đƣờng dây trong một năm từ đó tính toán hiệu quả cho đƣờng dây đang nghiên cứu.
Cuối năm 2010, lƣới trung áp của Công ty Điện lực Thái Nguyên có 1810,34 km đƣờng dây và tính đến hết quý 2 năm 2011 là khoảng 1830,34 km đƣờng dây. Vậy cƣờng độ hỏng hóc là 6,2 lần/100 km/năm.
Kỳ vọng thiếu hụt điện năng của hệ thống điện hiện tại (phân đoạn bằng dao cách ly đóng cắt thủ công) và kỳ vọng thiếu hụt điện năng khi áp dụng Autorecloser, DCLTĐ đƣợc xác định theo công thức:
E = λ.T.(P1 + P2 + P3+P4).(LI + LII + LIII+LIV) 2638.781 (kWh).
Hiệu quả kinh tế đƣợc cho ở bảng 6.
Theo biểu giá bán điện kèm quyết định số 21/2009/QĐ- TTg ngày 12/02/2009 của Thủ tƣớng chính phủ về giá bán điện năm 2009, các năm 2010-2012 và trích Thông tƣ số 08/2010/TT- BCT ngày 24/02/2010 của Bộ trƣởng Bộ Công Thƣơng ngày Quy định về giá bán điện hàng năm 2011 và hƣớng dẫn thực hiện có biểu giá nhƣ sau: Cấp điện áp từ 22 kV đến dƣới 110 kV:
- Giờ bình thƣờng: 898 đ/kWh
- Giờ thấp điểm: 496 đ/kWh
- Giờ cao điểm: 1.758 đ/kWh
Giá thành 1 kWh không bị mất do hạn chế đƣợc sự cố đắt gấp nhiều lần giá bán 1 kWh thông thƣờng (4 USD so với 0,097 USD).
Khi áp dụng Autorecloser, DCLTĐ cho mạch vòng 471-E6.2 + 472- E6.4 sẽ mang lại lợi nhuận (trong một năm):
B = 2638.781 x 4 x 21.000 = 221.660.000 đồng. (Hai trăm hai mƣơi mốt triệu sáu trăm
sáu mƣơi nghìn đồng chẵn – tỷ giá 1USD =
21.000 đồng).
Giá một máy Autorecloser cách điện bằng
dầu của Sam Sung (bao gồm các phụ kiện đi
kèm) khoảng 48 triệu đồng; Giá 1 DCLTĐ
loại khí của Hàn Quốc (bao gồm các phụ kiện
đi kèm) khoảng 28 triệu đồng. Chi phí vận
chuyển, lắp đặt bằng khoảng 5% giá thành
thiết bị. Do đó, số tiền để đầu tƣ lắp đặt
Autorecloser và DCLTĐ cho lộ đƣờng dây
trên là: 48 x 2 x 1,05+ 28 x 4 x 1,05 = 218,4
triệu đồng (Hai trăm mƣời tám triệu bốn trăm
nghìn đồng).
Bảng 6. Kết quả tính giá trị quy đổi về hiện tại của dòng lãi ròng (NPV)
Năm 0 1 2 3 4 5
Lợi nhuận, Bt
(triệu đồng) 0 221,66 221,66 221,66 221,66 221,66
Chi phí, Ct
(triệu đồng) 218,4 12 0 12 0 12
Lãi ròng, Bt - Ct - 218,4 209.66 221,66 209.66 221,66 209.66
Hệ số quy đổi
1/(1+r)t 1,000 0,926 0,857 0,794 0,735 0,681
Giá trị lãi ròng
quy về hiện tại
của năm thứ t
- 218,4 194.15 189.96 166.47 162.92 142.78
NPV 637.88 triệu đồng
Hà Thanh Tùng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 53 - 58
58
Để đánh giá hiệu quả kinh tế khi áp dụng
Autorecloser, DCLTĐ ta sẽ tính toán chỉ tiêu
NPV (Net present value) – Giá trị quy về hiện
tại của dòng lãi ròng.
∑
...)1( 0
n
0t
t
tt
n
nn
1
11000
r
r)(1
CB
r)(1
CB
r)(1
CB
r
CBNPV
= +=
+++
++
+=
Lấy hệ số giảm giá r = 8 %.
Ngoài vốn đầu tƣ ban đầu là 218,4 triệu đồng,
trong quá trình vận hành cần thêm chi phí bảo
dƣỡng cho các Autorecloser (3 triệu/1 máy);
bảo dƣỡng DCLTĐ (1,5 triệu/1bộ) với chu
kỳ bảo dƣỡng cho mỗi thiết bị là 2 năm/1 lần.
Căn cứ vào số liệu nêu trên cho thấy việc lắp
đặt thêm các thiết bị Autorecloser, DCLTĐ
đem lại hiệu quả cao về kinh tế ứng với tuổi
thọ của thiết bị là 20 năm.
KẾT LUẬN
Độ tin cậy cung cấp điện là một trong những
chỉ tiêu ngày càng đƣợc khách hàng và ngành
Điện đặc biệt quan tâm. Những thiệt hại do
mất điện không những tổn hại về kinh tế mà
còn ảnh hƣởng đến chính trị. Việc nâng cao
ổn định cung cấp điện luôn đƣợc đặt ra hàng
đầu đối với ngành điện. Tính toán, lựa chọn
các thiết bị điện một cách chính xác sẽ đem
lại hiệu quả cao trong quá trình ổn định HTĐ.
Bài báo đã tính toán nâng cao độ ổn định
cung cấp điện khi bố trí, lắp đặt các thiết bị tự
động đóng lặp lại trên lƣới điện. Từ đó áp
dụng cho các lƣới điện phân phối để đƣa ra
phƣơng án đầu tƣ hiệu quả.
TÀI LIỆU THAM KHẢO
[1]. Điện lực Thái Nguyên (2007). Báo cáo công tác
kinh doanh bán điện năm 2009. Phòng KH-VT
ĐLHT.
[2]. Trần Bách (2004). Lưới điện và hệ thống điện -
tập 2. Nxb KH&KT, Hà Nội.
[3]. Trần Bách (2004). Giáo trình lưới điện. Nxb
Giáo dục.
[4]. Trần Đình Long (1999). Quy hoạch phát triển
năng lượng và điện lực. Nxb KH&KT Hà Nội.
[5]. Bộ Công thƣơng, Thông tƣ số 32/2010/TT-BCT
ngày 30/7/2010 Quy định hệ thống phân phối điện.
[6]. Đại học Điện lực Hà Nội (2007). Áp dụng
PSS/ADEAPT 5.0 trong lƣới điện phân phối.
[7]. Binns, D.F (1986), Economics of electrical
power engineering, Electricial logic power Ltd., PO
Box 14, Manchester M16 7QA.
[8].E.Lakervi and E.J.Holmes (1995), Electricity
Distribution Network Design, Peter peregrinus Ltd
SUMMARY
A METHOD IMPROVE THE RELIABILITY THAI NGUYEN’S POWER
DISTRIBUTION SYSTEM USE OF AUTOMATION EQUIPMENT
(DISTRIBUTION SYSTEM AUTOMATINON)
Ha Thanh Tung*,1
, Pham Thi Hong Anh2
1College of Technology – TNU, 2College of Information & Communication Technology – TNU
To enhance quality service, improve continous electricity providing, more safety and more
effectively, ensuring the quality power is very important and necessary. The reliability is one of the
most important indicators to evaluate the grid. Power distribution system provides directly electric
energy to consumption, so the continous power providing for load depends on the reliabilty of the
grid. The reliabilty of power distribution system can be evaluated by many different indicators. One
of them is IEEE standard 1366 that applies widely all over the world. sewn directly to the household
power consumption thus providing electrical continuity for live load depends on the reliability of the
electric grid. This paper introduces indices to estimate reliability for distribution system according to
IEEE-1366 standard. It also uses PSS/ADEPT software to caculate above indices in Thai Nguyen
distribution system before and after having DAS (Distribution Automation System) to quantify
continuous electricity providing for customers.
Keywords: reliability, distribution, power quality, DAS, power supply.
Ngày nhận bài: 30/8/2013; Ngày phản biện: 27/9/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: PGS.TS. Nguyễn Thanh Hà – Đại học Thái Nguyên
* Tel: 0913789858; Email: [email protected]
Phạm Thị Ngọc Dung và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 59 - 63
59
KIỂM TOÁN NĂNG LƯỢNG VÀ SỬ DỤNG NĂNG LƯỢNG HIỆU QUẢ TRONG TÒA
NHÀ CAO TẦNG CÔNG TY TNHH KHOA HỌC & QUẢN LÝ VIỆT NAM (SMC)
Phạm Thị Ngọc Dung, Hà Thanh Tùng*
Trường Đại học Kỹ thuật Công nghiệp – ĐH Thái Nguyên
TÓM TẮT Giảm chi phí năng lƣợng là vấn đề thực tiễn, cấp bách trong nhiều lĩnh vực. Những năm gần đây,
kiểm toán năng lƣợng bắt đầu đóng vai trò quan trọng trong việc quản lý chi phí năng lƣợng. Kiểm
toán năng lƣợng bao gồm một loạt các kỹ thuật khảo sát và phân tích dòng năng lƣợng, trong đó
các tòa nhà là đối tƣợng đang đƣợc quan tâm hiện nay.
Bài báo giới thiệu chu trình xây dựng dự án kiểm toán năng lƣợng và các phƣơng pháp sử dụng
năng lƣợng hiệu quả trong trong các tòa nhà. Kết quả của công tác kiểm toán sẽ xác định đƣợc
tiềm năng tiết kiệm năng lƣợng, từ đó đề ra phƣơng án sử dụng năng lƣợng một cách hiệu quả tại
tòa nhà – trụ sở công ty TNHH Khoa học & quản lý Việt Nam (SMC).
Từ khóa: Kiểm toán năng lượng, chiếu sáng, nhà cao tầng, SMC Vietnam.
ĐẶT VẤN ĐỀ*
Việc sử dụng năng lƣợng tiết kiệm và hiệu
quả là ƣu tiên quan trọng trong chính sách
năng lƣợng quốc gia, trƣớc tình hình tài
nguyên năng lƣợng ngày càng khan hiếm nhƣ
nƣớc ta hiện nay [1],[2]. Giám sát quá trình
tiêu thụ năng lƣợng một cách chặt chẽ tại các
công ty, các cơ sở tiêu thụ năng lƣợng để tìm
ra phƣơng án tiết kiệm năng lƣợng là một
trong những việc làm cần thiết nhằm giảm
mức tiêu thụ năng lƣợng.
Kiểm toán năng lƣợng (KTNL) là quá trình
giám sát nhằm xác định đƣợc những bộ phận
sử dụng năng lƣợng lãng phí, tìm ra các cơ
hội tiết kiệm, từ đó đề xuất giải pháp tiết kiệm
năng lƣợng chung cho hệ thống và đặc biệt có
ý nghĩa đối với các tòa nhà cao tầng. Trên
thực tế, nếu công tác kiểm toán đƣợc triển
khai trên một quy mô rộng lớn thì năng lƣợng
tiết kiệm đƣợc sẽ trở thành một dạng nguồn
có trữ lƣợng cao, điều này dẫn đến giảm chi
phí xây dựng các nhà máy điện, tiết kiệm
đƣợc tài nguyên cho quốc gia.
KIỂM TOÁN NĂNG LƢỢNG TRONG TÕA
NHÀ CAO TẦNG
Mục đích
Kiểm toán năng lƣợng [3] giúp chúng ta xác
định đƣợc xu hƣớng tiêu thụ và khả năng tiết
* Tel: 0913789858; Email: [email protected]
kiệm năng lƣợng của các thiết bị khác nhau
nhƣ: động cơ, máy bơm, hệ thống chiếu sáng,
thông gió, điều hoà…
Các bƣớc xây dựng quy trình KTNL
B1: Khảo sát sơ bộ
- Liệt kê quy trình công nghệ, thiết bị cung
cấp và tiêu hao năng lƣợng, xác định định
mức tiêu thụ
- Xác định bƣớc đầu các công đoạn tiêu hao
năng lƣợng lớn
B2: Phân tích các dòng năng lượng
- Xây dựng sơ đồ công nghệ cho phần trọng
tâm kiểm toán
- Xác định sơ đồ dòng phân bố năng lƣợng
- Cân bằng vật chất – năng lƣợng
B3: Đề xuất các cơ hội tiết kiệm năng lượng
- Xác định các cơ hội tiết kiệm năng lƣợng
- Lựa chọn các cơ hội tiền khả thi
B4: Lựa chọn các cơ hội tiết kiệm năng lượng
- Đánh giá khả thi về kỹ thuật, kinh tế và môi
trƣờng
- Lựa chọn giải pháp thực hiện
B5: Áp dụng
- Thực hiện các giải pháp tiết kiệm năng
lƣợng
- Đo đạc và đánh giá kết quả
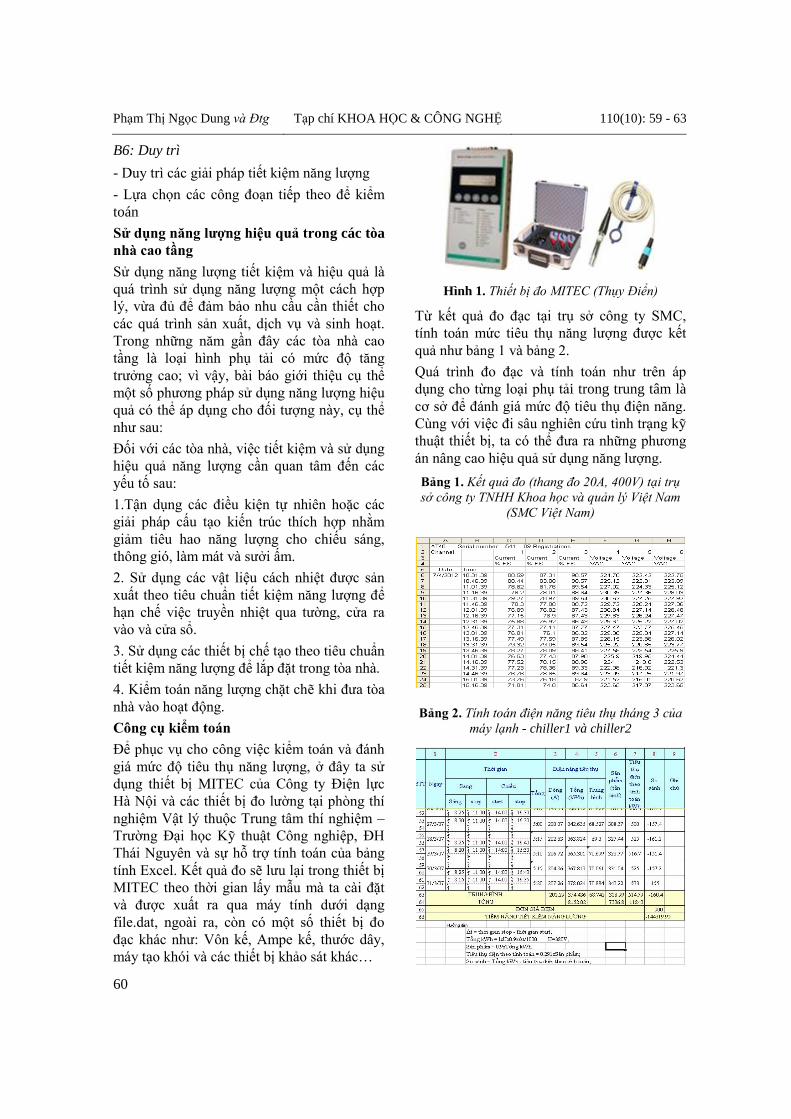
Phạm Thị Ngọc Dung và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 59 - 63
60
B6: Duy trì
- Duy trì các giải pháp tiết kiệm năng lƣợng
- Lựa chọn các công đoạn tiếp theo để kiểm
toán
Sử dụng năng lƣợng hiệu quả trong các tòa
nhà cao tầng
Sử dụng năng lƣợng tiết kiệm và hiệu quả là
quá trình sử dụng năng lƣợng một cách hợp
lý, vừa đủ để đảm bảo nhu cầu cần thiết cho
các quá trình sản xuất, dịch vụ và sinh hoạt.
Trong những năm gần đây các tòa nhà cao
tầng là loại hình phụ tải có mức độ tăng
trƣởng cao; vì vậy, bài báo giới thiệu cụ thể
một số phƣơng pháp sử dụng năng lƣợng hiệu
quả có thể áp dụng cho đối tƣợng này, cụ thể
nhƣ sau:
Đối với các tòa nhà, việc tiết kiệm và sử dụng
hiệu quả năng lƣợng cần quan tâm đến các
yếu tố sau:
1.Tận dụng các điều kiện tự nhiên hoặc các
giải pháp cấu tạo kiến trúc thích hợp nhằm
giảm tiêu hao năng lƣợng cho chiếu sáng,
thông gió, làm mát và sƣởi ấm.
2. Sử dụng các vật liệu cách nhiệt đƣợc sản
xuất theo tiêu chuẩn tiết kiệm năng lƣợng để
hạn chế việc truyền nhiệt qua tƣờng, cửa ra
vào và cửa sổ.
3. Sử dụng các thiết bị chế tạo theo tiêu chuẩn
tiết kiệm năng lƣợng để lắp đặt trong tòa nhà.
4. Kiểm toán năng lƣợng chặt chẽ khi đƣa tòa
nhà vào hoạt động.
Công cụ kiểm toán
Để phục vụ cho công việc kiểm toán và đánh
giá mức độ tiêu thụ năng lƣợng, ở đây ta sử
dụng thiết bị MITEC của Công ty Điện lực
Hà Nội và các thiết bị đo lƣờng tại phòng thí
nghiệm Vật lý thuộc Trung tâm thí nghiệm –
Trƣờng Đại học Kỹ thuật Công nghiệp, ĐH
Thái Nguyên và sự hỗ trợ tính toán của bảng
tính Excel. Kết quả đo sẽ lƣu lại trong thiết bị
MITEC theo thời gian lấy mẫu mà ta cài đặt
và đƣợc xuất ra qua máy tính dƣới dạng
file.dat, ngoài ra, còn có một số thiết bị đo
đạc khác nhƣ: Vôn kế, Ampe kế, thƣớc dây,
máy tạo khói và các thiết bị khảo sát khác…
Hình 1. Thiết bị đo MITEC (Thụy Điển)
Từ kết quả đo đạc tại trụ sở công ty SMC,
tính toán mức tiêu thụ năng lƣợng đƣợc kết
quả nhƣ bảng 1 và bảng 2.
Quá trình đo đạc và tính toán nhƣ trên áp
dụng cho từng loại phụ tải trong trung tâm là
cơ sở để đánh giá mức độ tiêu thụ điện năng.
Cùng với việc đi sâu nghiên cứu tình trạng kỹ
thuật thiết bị, ta có thể đƣa ra những phƣơng
án nâng cao hiệu quả sử dụng năng lƣợng.
Bảng 1. Kết quả đo (thang đo 20A, 400V) tại trụ
sở công ty TNHH Khoa học và quản lý Việt Nam
(SMC Việt Nam)
Bảng 2. Tính toán điện năng tiêu thụ tháng 3 của
máy lạnh - chiller1 và chiller2
Phạm Thị Ngọc Dung và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 59 - 63
61
ĐỀ XUẤT CÁC PHƢƠNG ÁN SỬ DỤNG
NĂNG LƢỢNG HIỆU QUẢ CHO CÁC
TÒA NHÀ
Máy lạnh:
- Tăng nhiệt độ điều hòa trong phòng.
- Hạ nhiệt độ nƣớc ở tháp giải nhiệtCó thể
thay hệ thống này bằng tháp làm mát bằng
nƣớc đối với các máy lạnh sử dụng tháp làm
mát bằng gió hiệu suất thấp [5].
Hệ thống xử lí không khí đặt sàn (AHU):
- Lắp đặt bộ VSD:
Điều chỉnh lƣu lƣợng không khí của quạt
bằng cách lắp đặt bộ điều tốc VSD với vòng
điều khiển kín đo nhiệt độ phòng sẽ tiết kiệm
năng lƣợng điện tiêu thụ cho quạt khoảng
30% và có thể là cao hơn.
- Một số giải pháp khác:
+ Sử dụng đƣờng ống tròn để lấy khí tự nhiên
vào cho các AHU.
+ Giảm thiểu vật cản đối với đầu vào của bộ
phận thu hồi khí.
+ Có biện pháp thƣờng xuyên làm sạch màng
lọc, bộ lọc và cánh quạt.
+ Thƣờng xuyên kiểm tra độ căng dây curoa
để đảm bảo hiệu suất truyền công suất.
+ Loại bỏ những chỗ rò rỉ trong đƣờng ống.
+ Định kỳ cải tạo, vệ sinh hệ thống đƣờng
ống.
+ Đảm bảo chất lƣợng điện năng cung cấp
cho động cơ.
Hệ thống bơm:
- Lắp đặt thiết bị điều tốc VSD cho động cơ
bơm nƣớc lạnh. Khi lắp đặt thiết bị điều khiển
tự động tốc độ động cơ của máy bơm sẽ, cho
phép giảm 30% điện năng tiêu thụ.
- Thay mới bằng bơm có hiệu suất cao. Bơm
hiệu suất cao có khả năng tiết kiệm đƣợc 20%
điện năng tiêu thụ.
Hệ thống chiếu sáng [4], [5]:
- Lắp thiết bị tiết kiệm năng lƣợng Fluoresave
cho hệ thống chiếu sáng.
- Phân mảnh hệ thống công tắc điều khiển và
tăng cƣờng chiếu sáng tự nhiên.
- Thay đổi thói quen của ngƣời sử dụng điện.
ỨNG DỤNG KIỂM TOÁN NĂNG LƢỢNG
TẠI TÕA NHÀ CÔNG TY SMC VIỆT NAM
Trụ sở công ty SMC Việt Nam có quy mô 8
tầng lầu, tổng diện tích sử dụng 2.500m2 đƣợc
trang bị 250 máy tính kết nối Internet… đủ để
phục vụ cho công tác đào tạo quản lý, nghiên
cứu của gần 300 cán bộ, giảng viên và học
viên [6].
Hệ thống phụ tải của trung tâm có thể chia
thành các nhóm chính nhƣ sau:
• Hệ thống máy lạnh
• Hệ thống chiếu sáng
• Thiết bị xử lý không khí AHU
• Phụ tải ổ cắm
• Bơm nƣớc lạnh
Dựa trên kết quả của công tác kiểm toán đƣợc
tiến hành theo phƣơng pháp tính toán trên, ta
có thể đánh giá mức độ tiêu thụ năng lƣợng
và hiệu quả tiết kiệm năng lƣợng của trung
tâm nhƣ sau:
Máy lạnh
Mức độ tiêu thụ:
- Trong tháng 3 điện năng tiêu thụ của cụm
máy lạnh là: 8125kWh.
- Công suất lạnh tƣơng ứng: 7357TR.
- Mức tiêu thụ năng lƣợng 1,11kWh/TR.
Đánh giá:
- Ứng với mỗi mức tăng nhiệt độ trong phòng
lên 1oC thì hàng tháng ƣớc tính sẽ tiết kiệm
đƣợc 906kWh điện năng tiêu thụ của chiller,
chi phí tiết kiệm sẽ là 54 USD.
- Có thể thay hệ thống này bằng tháp làm mát
bằng nƣớc có công suất 150TR ở nhiệt độ bầu
ẩm 28oC, nhiệt độ nƣớc vào tháp 35
oC và ra
khỏi tháp là 30oC. Tổng chi phí mua tháp
nƣớc, đƣờng ống và lắp đặt khoảng 4500
USD. Lƣợng điện năng tiết kiệm đƣợc hàng
tháng là: 1304kWh. Chi phi tiết kiệm đƣợc
hàng tháng: 80 USD. Thời gian hoàn vốn là
4,5 năm.
Hệ thống xử lí không khí đặt sàn AHU
Mức độ tiêu thụ:
- Nhìn chung các AHU vận hành rất ổn định.
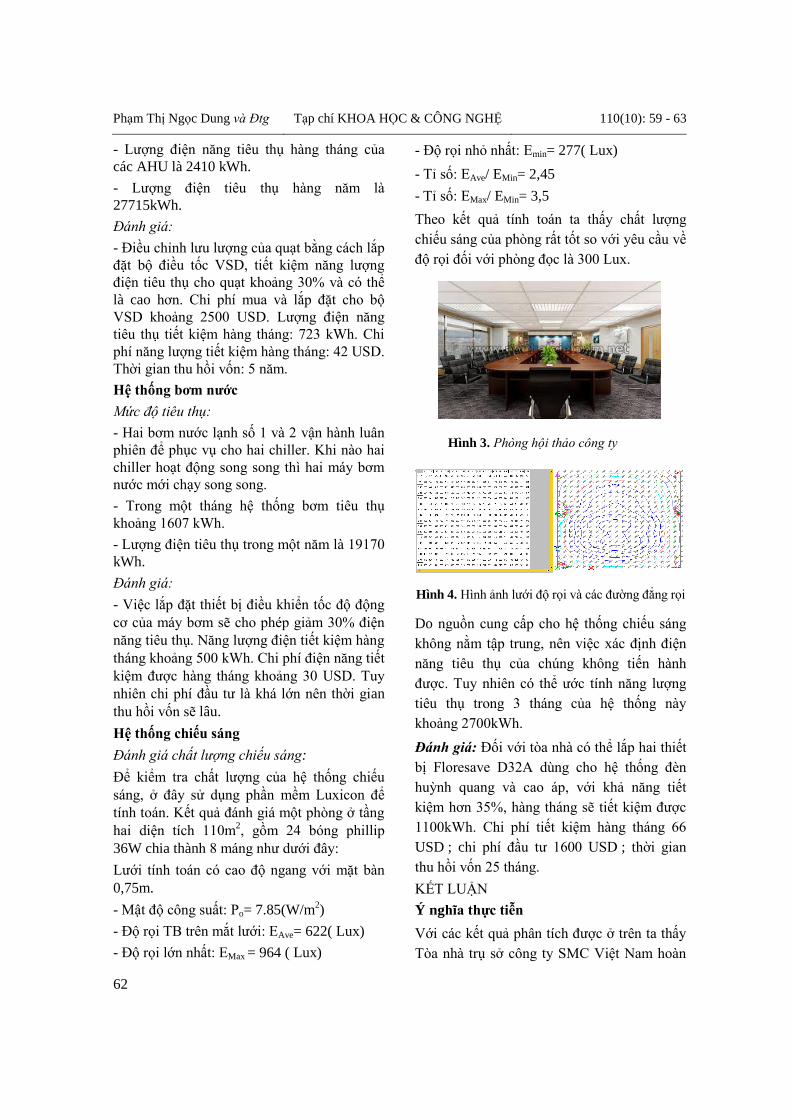
Phạm Thị Ngọc Dung và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 59 - 63
62
- Lƣợng điện năng tiêu thụ hàng tháng của
các AHU là 2410 kWh.
- Lƣợng điện tiêu thụ hàng năm là
27715kWh.
Đánh giá:
- Điều chỉnh lƣu lƣợng của quạt bằng cách lắp
đặt bộ điều tốc VSD, tiết kiệm năng lƣợng
điện tiêu thụ cho quạt khoảng 30% và có thể
là cao hơn. Chi phí mua và lắp đặt cho bộ
VSD khoảng 2500 USD. Lƣợng điện năng
tiêu thụ tiết kiệm hàng tháng: 723 kWh. Chi
phí năng lƣợng tiết kiệm hàng tháng: 42 USD.
Thời gian thu hồi vốn: 5 năm.
Hệ thống bơm nƣớc
Mức độ tiêu thụ:
- Hai bơm nƣớc lạnh số 1 và 2 vận hành luân
phiên để phục vụ cho hai chiller. Khi nào hai
chiller hoạt động song song thì hai máy bơm
nƣớc mới chạy song song.
- Trong một tháng hệ thống bơm tiêu thụ
khoảng 1607 kWh.
- Lƣợng điện tiêu thụ trong một năm là 19170
kWh.
Đánh giá:
- Việc lắp đặt thiết bị điều khiển tốc độ động
cơ của máy bơm sẽ cho phép giảm 30% điện
năng tiêu thụ. Năng lƣợng điện tiết kiệm hàng
tháng khoảng 500 kWh. Chi phí điện năng tiết
kiệm đƣợc hàng tháng khoảng 30 USD. Tuy
nhiên chi phí đầu tƣ là khá lớn nên thời gian
thu hồi vốn sẽ lâu.
Hệ thống chiếu sáng
Đánh giá chất lượng chiếu sáng:
Để kiểm tra chất lƣợng của hệ thống chiếu
sáng, ở đây sử dụng phần mềm Luxicon để
tính toán. Kết quả đánh giá một phòng ở tầng
hai diện tích 110m2, gồm 24 bóng phillip
36W chia thành 8 máng nhƣ dƣới đây:
Lƣới tính toán có cao độ ngang với mặt bàn
0,75m.
- Mật độ công suất: Po= 7.85(W/m2)
- Độ rọi TB trên mắt lƣới: EAve= 622( Lux)
- Độ rọi lớn nhất: EMax = 964 ( Lux)
- Độ rọi nhỏ nhất: Emin= 277( Lux)
- Tỉ số: EAve/ EMin= 2,45
- Tỉ số: EMax/ EMin= 3,5
Theo kết quả tính toán ta thấy chất lƣợng
chiếu sáng của phòng rất tốt so với yêu cầu về
độ rọi đối với phòng đọc là 300 Lux.
Hình 3. Phòng hội thảo công ty
.
Hình 4. Hình ảnh lƣới độ rọi và các đƣờng đẳng rọi
Do nguồn cung cấp cho hệ thống chiếu sáng
không nằm tập trung, nên việc xác định điện
năng tiêu thụ của chúng không tiến hành
đƣợc. Tuy nhiên có thể ƣớc tính năng lƣợng
tiêu thụ trong 3 tháng của hệ thống này
khoảng 2700kWh.
Đánh giá: Đối với tòa nhà có thể lắp hai thiết
bị Floresave D32A dùng cho hệ thống đèn
huỳnh quang và cao áp, với khả năng tiết
kiệm hơn 35%, hàng tháng sẽ tiết kiệm đƣợc
1100kWh. Chi phí tiết kiệm hàng tháng 66
USD ; chi phí đầu tƣ 1600 USD ; thời gian
thu hồi vốn 25 tháng.
KẾT LUẬN
Ý nghĩa thực tiễn
Với các kết quả phân tích đƣợc ở trên ta thấy
Tòa nhà trụ sở công ty SMC Việt Nam hoàn

Phạm Thị Ngọc Dung và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 59 - 63
63
toàn có khả năng tiết kiệm năng lƣợng tiêu
thụ. Các phƣơng án đƣợc đề xuất có mức tiết
kiệm đạt đƣợc khác nhau, tùy theo khả năng
của mình có thể có những biện pháp đầu tƣ
hợp lí để có đƣợc hiệu quả cao hơn trong việc
sử dụng năng lƣợng.
Hƣớng phát triển
Việc nghiên cứu tổng thể về kiểm toán nhằm
tiết kiệm năng lƣợng ở quy mô quốc gia, đặc
biệt là ở nƣớc ta mang ý nghĩa to lớn. Chƣơng
trình tiết kiệm năng lƣợng một khi đƣợc ứng
dụng rộng rãi thì hiệu quả nó mang lại sẽ rất
đáng kể. Nƣớc ta sẽ tiết kiệm đƣợc một khoản
chi phí lớn trong việc đầu tƣ xây dựng nguồn
là các nhà máy điện, đồng thời khai thác đƣợc
một nguồn năng lƣợng mới vốn đã có sẵn.
TÀI LIỆU THAM KHẢO
[1]. LM Markovits, Trần Đình Long, Bùi Ngọc
Thƣ, Bùi Thiên Dụ, Hà Học Trạc (dịch), (1975).
Các chế độ của hệ thống năng lượng. Nxb KH-KT.
[2]. Lê Văn Doanh, Phạm Văn Bình, Phạm Hùng
Phi, Trần Văn Tớp, Nguyễn Xuân Hoàng Việt,
(2010). Sử dụng năng lượng tiết kiệm và hiệu quả.
Nxb KH-KT.
[3]. Patrick Vandeplanque, Lê Văn Doanh, Đặng
Văn Đào (dịch), (2000). Kỹ thuật chiếu sáng. Nxb
KH-KT.
[4]. PGS.TS Phạm Đức Nguyên, (1997). Chiếu
sáng tự nhiên và nhân tạo. Nxb KH-KT.
[5]. Nguyễn Văn May (2006). Máy lạnh và điều
hòa không khí. Nxb KH-KT.
[6]. Tài liệu quản lý tòa nhà trụ sở công ty TNHH
Khoa học và quản lý Việt Nam
SUMMARY
ENERGY AUDITS AND ENERGY AND EFFICIENCE IN BUILDINGS &
SCIENCE CO., LTD VIETNAM ADMINISTRATION (SMC)
Pham Thi Ngoc Dung, Ha Thanh Tung*
College of Technology – TNU
The need to reduce energy costs is a crucial business practice for successful organizations, and
energy audits have begun to play a more significant role in managing energy expenses. Energy
audits can encompass a variety of surveying techniques but most commonly consist of an analysis
of energy usage within a building or facility and its contained equipment.
This article introduces the process of building an energy-auditing project and methods for using
energy efficiency in buildings. Based on the findings, some recommendations are made on how to
use the energy economically. Specifically, the energy audition has been applied at the Vietnam
Science and Management Company (SMC Viet Nam).
Keywords: Energy auditis, lighting, buildings, SMC Vietnam.
Ngày nhận bài: 30/8/2013; Ngày phản biện: 26/9/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: PGS.TS. Nguyễn Thanh Hà – Đại học Thái Nguyên
* Tel: 0913789858; Email: [email protected]

Phạm Thị Ngọc Dung và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 59 - 63
64

Phạm Việt Bình và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 65 - 70
65
MỘT PHƢƠNG PHÁP PHÂN TÍCH VÀ DỰ BÁO SẢN LƢỢNG CHÈ
TỈNH THÁI NGUYÊN
Phạm Việt Bình
*, Nguyễn Văn Huân, Vũ Xuân Nam, Lê Anh Tú
Trường Đại học Công nghệ thông tin và Truyền thông – ĐH Thái Nguyên
TÓM TẮT Trong thực tế, phân tích và dự báo kinh tế đóng một vai trò quan trọng, giúp cho các nhà quản lý
chủ động trong việc đề ra các kế hoạch và các quyết định cần thiết phục vụ cho quá trình sản xuất
kinh doanh, đầu tƣ, quảng bá, quy mô sản xuất, kênh phân phối sản phẩm, nguồn cung cấp tài
chính,… Trong các cây công nghiệp trên địa bàn Trung du và miền núi phía Bắc nói chung và
Thái Nguyên nói riêng, chè là cây công nghiệp quan trọng trong phát triển kinh tế, xã hội của khu
vực. Trƣớc yêu cầu phát triển kinh tế, đặc biệt là trong quá trình hội nhập kinh tế quốc tế hiện nay,
để tồn tại và phát triển vững chắc ngành chè phải có những giải pháp mới phù hợp để có thể phát
triển sản lƣợng và chất lƣợng chè. Một trong những công việc cấp thiết của các giải pháp là việc
phân tích đánh giá và dự báo sản lƣợng chè trong những năm tiếp theo ở tỉnh Thái Nguyên.
Bài báo này đề xuất giải pháp ứng dụng một phƣơng pháp phân tích và dự báo “hồi quy tuyến
tính” vào dự báo sản lƣợng chè Tỉnh Thái Nguyên trên cơ sở trên cơ sở thu thập, phân tích và kiểm
định dữ liệu từ đó đƣa ra những giải pháp cũng nhƣ những quyết định tối ƣu nhằm thúc đẩy phát
triển kinh tế xã hội.
Từ khoá: Hồi quy tuyến tính, phân tích và dự báo, sản lượng chè,; Thái Nguyên.
GIỚI THIỆU*
Bài toán phân tích và dự báo là một bài toán có
ý nghĩa quan trọng trong việc hỗ trợ các nhà
quản lý đƣa ra quyết định đúng đắn dựa vào
các dữ liệu đã thu thập đƣợc. Khi tiến hành dự
báo cần căn cứ vào việc thu thập, xử lý số liệu
trong quá khứ và hiện tại để xác định xu hƣớng
vận động của các hiện tƣợng trong tƣơng lai
nhờ vào một số mô hình toán học [3].
Trên thế giới đã có nhiều tác giả đƣa ra cách
phân loại các phƣơng pháp dự báo khác nhau.
Tuy nhiên, theo Gordon trong hai thập kỷ gần
đây, có 08 phƣơng pháp dự báo đƣợc áp dụng
rộng rãi trên thế giới nhƣ: Tiên đoán, ngoại
suy xu hƣớng, dự báo tổng hợp,…[1],[2].
Hiện nay, ở Việt Nam có rất nhiều đơn vị
tham gia công tác phân tích dữ liệu và dự báo
phục vụ việc lập và triển khai các kế hoạch
phát triển kinh tế xã hội nhƣ: Bộ Kế hoạch và
Đầu tƣ, Trung tâm Thông tin và Dự báo Kinh
tế Xã hội Quốc gia, Viện Chiến lƣợc phát
triển, Tổng cục Thống kê và Vụ Tổng hợp
kinh tế quốc dân,… Bên cạnh đó, bài toán
phân tích và dự báo đã đƣợc một số nhà quản
* Tel: 0913256966; Email: [email protected]
lý, chuyên gia kinh tế nghiên cứu và đề xuất
một số giải pháp ứng dụng vào một số lĩnh
vực cụ thể: Phân tích và dự báo tình hình tài
chính [9], tiền tệ [7], hoạch định và điều hành
chính sách tài chính [5], xây dựng mô hình dự
báo chỉ số thống kê xã hội chủ yếu [4], dự báo
biến động giá chứng khoán [8], dự báo sự tác
động của vốn đầu tƣ từ nƣớc ngoài [10], dự
báo giá một số mặt hàng tƣ liệu sản xuất [6].
Tuy nhiên, những nghiên cứu này chƣa tập
trung nhiều vào việc dự báo sản lƣợng cho
một số cây công nghiệp nhằm có đƣợc những
biện pháp phát triển đem lại hiệu quả kinh tế
cao[3],[4],[5].
Trong các cây công nghiệp trên địa bàn Trung
du và miền núi phía Bắc nói chung và Thái
Nguyên nói riêng, chè là cây công nghiệp
quan trọng trong phát triển kinh tế, xã hội của
khu vực. Trƣớc yêu cầu phát triển kinh tế, đặc
biệt là trong quá trình hội nhập kinh tế quốc tế
hiện nay, để tồn tại và phát triển vững chắc
ngành chè phải có những giải pháp mới phù
hợp để có thể phát triển sản lƣợng và chất
lƣợng chè. Một trong những công việc cấp
thiết của các giải pháp là việc phân tích đánh
giá và dự báo sản lƣợng chè trong những năm
tiếp theo ở tỉnh Thái Nguyên [3],[13].

Phạm Việt Bình và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 65 - 70
66
Để dự báo sản lƣợng chè thì có nhiều phƣơng
pháp, nhƣng với mỗi phƣơng pháp lại phù
hợp với những loại dữ liệu khác nhau. Chẳng
hạn, với phƣơng pháp san bằng mũ thì số liệu
là không có xu thế và không có biến động
thời vụ rõ rệt, đối với phƣơng pháp dự báo
dựa vào tốc độ phát triển bình quân thì có bộ
số liệu mà mức độ của dãy số biến động có
tốc độ phát triển từng kỳ gần nhau,…Mà thực
tế, sản lƣợng chè phụ thuộc vào nhiều yếu tố
nhƣ: diện tích trồng chè, phân bón, thời tiết,
thiên tai, sự quan tâm chăm sóc của ngƣời
trồng chè….[13]. Do đó, điều này dẫn đến
việc có sai số trong việc dự báo nếu áp dụng
với một vài yếu tố trong việc dự báo.
Bài báo này đề xuất việc áp dụng mô hình dự
báo theo phƣơng trình hồi quy tuyến tính
trong việc dự báo sản lƣợng chè Tỉnh Thái
Nguyên[3] dƣới các điều kiện tác động về
diện tích trồng chè, phân bón, thời tiết, thiên
tai, sự quan tâm chăm sóc của ngƣời trồng
chè,….
PHƢƠNG PHÁP HỒI QUY TUYẾN TÍNH
+ Mô hình hồi quy tuyến tính
Nhiệm vụ đầu tiên của phân tích hồi quy
tƣơng quan là xây dựng mô hình hồi quy
và xác định tính chất cũng nhƣ hình thức của
mối liên hệ[3].
Mô hình dự đoán theo phƣơng trình hồi quy:
tbay .ˆ
Trong đó:
t : Trị số của tiêu thức gây ảnh hƣởng
(nguyên nhân) (biến độc lập).
y : Trị số điều chỉnh của tiêu thức chịu ảnh
hƣởng (kết quả) (biến phụ thuộc) theo quan
hệ với t.
a: Hệ số tự do (hệ số chặn), là điểm xuất phát
của đƣờng hồi quy lý thuyết, nêu lên ảnh
hƣởng của các nhân tố khác (tiêu thức nguyên
nhân khác) ngoài t tới sự biến động của y. nếu
0) (
0) ( ..
22
tn
y
n
y
ttt
tyty
a
b: Hệ số hồi quy (hệ số góc, độ dốc), phản
ánh ảnh hƣởng trực tiếp của tiêu thức nguyên
nhân t đến tiêu thức kết quả y. Mỗi khi t tăng
lên 1 đơn vị thì y sẽ thay đổi trung bình b đơn
vị. b nói lên chiều hƣớng của mối liên hệ: b >
0: Mối liên hệ thuận; b < 0: Mối liên hệ
nghịch.
0) (
0) (.
2t
t
yt
ttay
b
+ Sai số của dự báo:
Sai số dự báo là sự chênh lệch giữa mức độ
thực tế và mức độ tính toán theo mô hình dự
báo.
Sai số dự báo phụ thuộc vào 03 yếu tố: độ
biến thiên của tiêu thức trong thời kỳ trƣớc,
độ dài của thời gian của thời kỳ trƣớc và độ
dài của thời kỳ dự đoán.
Vấn đề quan trọng nhất trong dự báo bằng
ngoại suy hàm xu thế là lựa chọn hàm xu thế,
xác định sai số dự đoán và khoảng dự đoán:
Công thức tính sai số chuẩn ( y )
2
i
y
y y
n p
Trong đó:
y : Sai số chuẩn
y : Giá trị tính toán theo hàm xu thế
N: Số các mức độ trong dãy số
P: Số các tham số cần tìm trong mô hình xu
thế
Công thức tính sai số dự báo:
pS = δy
)1(
)12(311
nn
n
n
L
Trong đó:
pS: Sai số của dự báo
n: số lƣợng các mức độ (n=10)

Phạm Việt Bình và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 65 - 70
67
L: tầm xa của dự báo
y : sai số chuẩn
Sau đó xác định khoảng dự đoán theo công
thức sau: $
pn Ly t S
t- là giá trị theo bảng của tiêu chuẩn t-
Student với (n-2) bậc tự do và xác suất tin cậy
(t- ).
+ Hệ số tƣơng quan: Hệ số tƣơng quan là chỉ
tiêu đánh giá mức độ chặt chẽ của mối liên hệ
tƣơng quan tuyến tính đơn[3].
Công thức tính:
y
x
yx
byxxy
r ..
.
Nhƣ vậy, dấu của hệ số tƣơng quan r phụ
thuộc vào dấu của hệ số b vì phƣơng sai luôn
mang dấu dƣơng.
Các tính chất của hệ số tƣơng quan: Miền xác
định: –1 ≤ r ≤ 1.
r > 0: Mối liên hệ tƣơng quan tuyến tính
thuận.
r < 0: Mối liên hệ tƣơng quan tuyến tính
nghịch.
r = ± 1: Mối liên hệ hàm số hoàn toàn chặt
chẽ.
r = 0: Không có mối liên hệ tƣơng quan
tuyến tính giữa x và y.
r càng gần 1: Mối liên hệ càng chặt chẽ
(cƣờng độ mối liên hệ).
rất chặt chẽ.
chẽ.
r < 0,5 : Mối liên hệ hết sức lỏng lẻo.
+ Hệ số xác định: Hệ số xác định (2r ) dùng
để đánh giá sự phù hợp của mô hình, nó cho
biết tỷ lệ % thay đổi của y đƣợc giải thích bởi
mô hình[3].
ỨNG DỤNG PHƢƠNG PHÁP HỒI QUY
TUYẾN TÍNH PHÂN TÍCH DỮ LIỆU VÀ DỰ
BÁO SẢN LƢỢNG CHÈ THÁI NGUYÊN
Đặt vấn đề bài toán
Xuất phát từ dữ liệu khảo sát thực tế, nhóm
tác giả xây dựng hệ thống phân tích và dự báo
thực nghiệm với một số phƣơng pháp nhƣ:
hồi quy tuyến tính, hồi quy bội, san bằng
mũ,… bằng Visual Studio 2010 và hệ quản trị
cơ sở dữ liệu SQL Server 2008 với một số
chức năng nhƣ:
Tải dữ liệu qua các định dạng dữ liệu đƣợc
lƣu ở tệp Text, Excel, Sql,…
Tự động tra dữ liệu qua bảng tra T –
Student.
Xuất biểu đồ thể hiện phƣơng trình hồi quy
và đƣờng xu thế
Xuất bảng kết quả phân tích và dự báo: dự
báo điểm, sai số dự báo, sai số chuẩn, khoảng
dự báo….
Xuất biểu đồ cột theo các năm.
Ứng dụng phân tích và dự báo sản lƣợng
chè tỉnh Thái Nguyên
Bước 1. Thu thập và tổ chức dữ liệu
Dựa vào số liệu đƣợc trích dẫn từ Niên giám
thống kê Việt Nam năm 2008 của Tổng cục
thống kê Việt Nam; Niên giám thống kê tỉnh
Thái Nguyên 2011 của Cục Thống kê tỉnh
Thái Nguyên; Niên giám thống kê tỉnh Thái
Nguyên 2008 của Cục Thống kê tỉnh Thái
Nguyên; Báo cáo tình hình sản xuất, chế
biến, tiêu thụ chè tỉnh Thái Nguyên giai đoạn
2000 – 2008,… [12],[13],[14] Nhóm tác giả
đã tiến hành thu thập đƣợc số liệu về sản
lƣợng chè tỉnh Thái Nguyên qua các năm thể
hiện qua bảng sau:
Hình 1. Bảng số liệu thống kê sản lượng chè
Phạm Việt Bình và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 65 - 70
68
Bước 2. Xác định các điều kiện chọn đầu vào
cho dự báo
Để tiến hành đánh giá sai số của dự báo,
chúng ta tiến hành xác định các điều kiện
chọn đầu vào cho dự báo gồm xác suất độ tin
cậy , t
và tầm xa của dự báo.
Hình 2. Điều kiện chọn đầu vào cho dự báo
Bước 3. Xây dựng mô hình hồi quy
Dựa vào bảng số liệu đầu vào, hệ thống sẽ
tiến hành phân tích và thể hiện phƣơng trình
hồi quy tuyến tính.
Hình 3. Phương trình hồi quy tuyến tính
Biểu đồ cho thấy phƣơng trình hồi quy tuyến
tính là y = 145.5589 + 6t
Do lựa chọn ∑t # 0 nên dễ dàng dự báo dự
đoán điểm sản lƣợng chè cho các năm tiếp
theo (Do có 9 quan sát nên để dự báo sản
lƣợng cho năm 2013 thì t=10)
2013y145.5589 + 6.10 = 205.58
Bước 5. Phân tích kết quả dự báo
Với xác suất tin cậy là 0.95 và số bậc tự do
(n) = 7 khi đó hệ thống sẽ tiến hành tra trong
bảng T- Student và có đƣợc t
= 3.25.
Dựa vào bảng kết quả dự báo mà hệ thống đƣa ra,
chúng ta dễ dàng nhận thấy sai số chuẩn y =
7.64 và sai số dự báo pS.
Nhƣ vậy khoảng dự báo sản lƣợng chè năm 2013
sẽ là : 205.58 3.25*9.1
Hình 4. Bảng kết quả dự báo sản lượng chè
Bảng kết quả dự báo mà hệ thống đƣa ra sẽ cho
thấy điểm cận trên và điểm cận dƣới của dự báo
hay chính là khoảng dự báo sản lƣợng chè năm
2013 của tỉnh Thái Nguyên là từ 176.02 đến
235.14 (nghìn tấn).
Hình 5. Biểu đồ kết quả phân tích dự báo
Bước 6. Kiểm định kết quả dự báo
Để đánh giá kết quả dự báo có chính xác hay
không, chúng ta tiến hành phân tích và dự báo
sản lƣợng chè cho năm 2012 của tỉnh Thái
Nguyên với bộ dữ liệu nhƣ trên nhƣng đƣợc
thu thập từ năm 2004 đến năm 2011.
Tƣơng tự với điều kiện chọn đầu vào là xác
suất độ tin cậy 95%, số bậc tự do là 6 và dự
báo cho năm 2012. Hệ thống sẽ tiến hành
phân tích, xử lý và cho bảng kết quả dự báo
sản lƣợng chè năm 2012.
Hình 6. Bảng kết quả dự báo sản lượng chè tỉnh
Thái Nguyên năm 2012
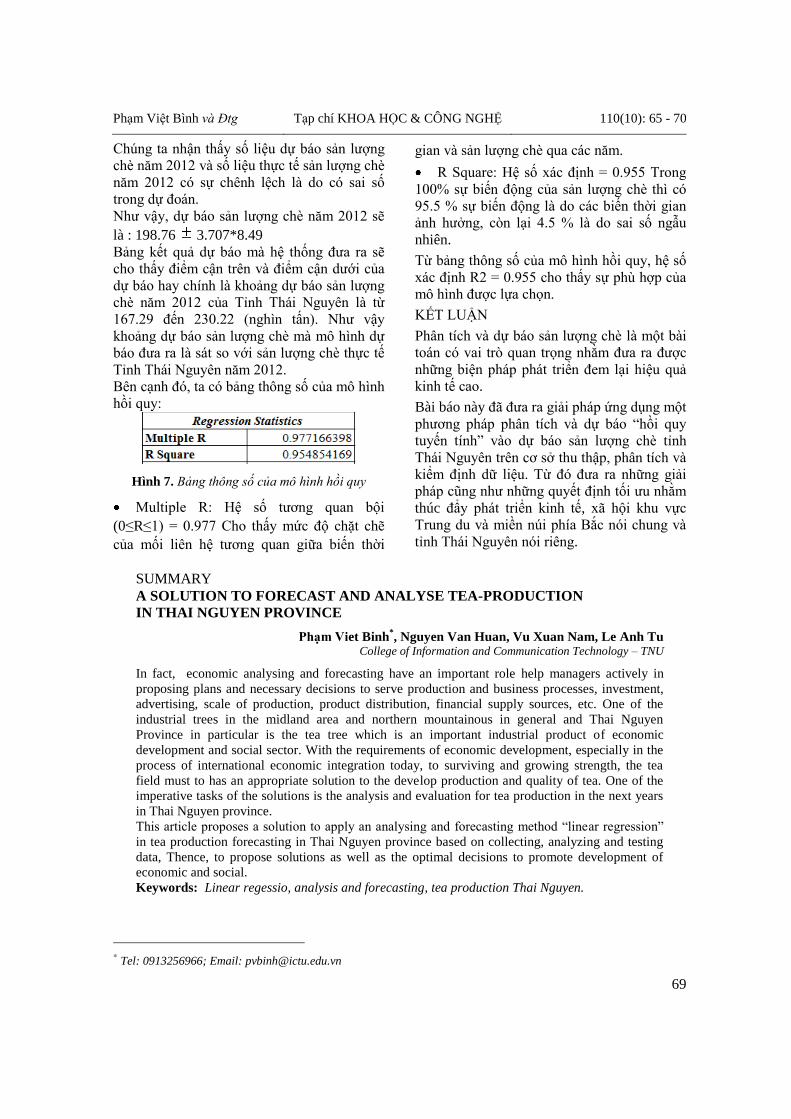
Phạm Việt Bình và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 65 - 70
69
Chúng ta nhận thấy số liệu dự báo sản lƣợng
chè năm 2012 và số liệu thực tế sản lƣợng chè
năm 2012 có sự chênh lệch là do có sai số
trong dự đoán.
Nhƣ vậy, dự báo sản lƣợng chè năm 2012 sẽ
là : 198.76 3.707*8.49
Bảng kết quả dự báo mà hệ thống đƣa ra sẽ
cho thấy điểm cận trên và điểm cận dƣới của
dự báo hay chính là khoảng dự báo sản lƣợng
chè năm 2012 của Tỉnh Thái Nguyên là từ
167.29 đến 230.22 (nghìn tấn). Nhƣ vậy
khoảng dự báo sản lƣợng chè mà mô hình dự
báo đƣa ra là sát so với sản lƣợng chè thực tế
Tỉnh Thái Nguyên năm 2012.
Bên cạnh đó, ta có bảng thông số của mô hình
hồi quy:
Hình 7. Bảng thông số của mô hình hồi quy
Multiple R: Hệ số tƣơng quan bội
(0≤R≤1) = 0.977 Cho thấy mức độ chặt chẽ
của mối liên hệ tƣơng quan giữa biến thời
gian và sản lƣợng chè qua các năm.
R Square: Hệ số xác định = 0.955 Trong
100% sự biến động của sản lƣợng chè thì có
95.5 % sự biến động là do các biến thời gian
ảnh hƣởng, còn lại 4.5 % là do sai số ngẫu
nhiên.
Từ bảng thông số của mô hình hồi quy, hệ số
xác định R2 = 0.955 cho thấy sự phù hợp của
mô hình đƣợc lựa chọn.
KẾT LUẬN
Phân tích và dự báo sản lƣợng chè là một bài
toán có vai trò quan trọng nhằm đƣa ra đƣợc
những biện pháp phát triển đem lại hiệu quả
kinh tế cao.
Bài báo này đã đƣa ra giải pháp ứng dụng một
phƣơng pháp phân tích và dự báo “hồi quy
tuyến tính” vào dự báo sản lƣợng chè tỉnh
Thái Nguyên trên cơ sở thu thập, phân tích và
kiểm định dữ liệu. Từ đó đƣa ra những giải
pháp cũng nhƣ những quyết định tối ƣu nhằm
thúc đẩy phát triển kinh tế, xã hội khu vực
Trung du và miền núi phía Bắc nói chung và
tỉnh Thái Nguyên nói riêng.
SUMMARY
A SOLUTION TO FORECAST AND ANALYSE TEA-PRODUCTION
IN THAI NGUYEN PROVINCE
Phạm Viet Binh*, Nguyen Van Huan, Vu Xuan Nam, Le Anh Tu
College of Information and Communication Technology – TNU
In fact, economic analysing and forecasting have an important role help managers actively in
proposing plans and necessary decisions to serve production and business processes, investment,
advertising, scale of production, product distribution, financial supply sources, etc. One of the
industrial trees in the midland area and northern mountainous in general and Thai Nguyen
Province in particular is the tea tree which is an important industrial product of economic
development and social sector. With the requirements of economic development, especially in the
process of international economic integration today, to surviving and growing strength, the tea
field must to has an appropriate solution to the develop production and quality of tea. One of the
imperative tasks of the solutions is the analysis and evaluation for tea production in the next years
in Thai Nguyen province.
This article proposes a solution to apply an analysing and forecasting method “linear regression”
in tea production forecasting in Thai Nguyen province based on collecting, analyzing and testing
data, Thence, to propose solutions as well as the optimal decisions to promote development of
economic and social.
Keywords: Linear regessio, analysis and forecasting, tea production Thai Nguyen.
* Tel: 0913256966; Email: [email protected]

Phạm Việt Bình và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 65 - 70
70
TÀI LIỆU THAM KHẢO
[1]. Theodore Jay Gordon, (1994), Integration of
Forecasting Methods and the Frontiers of Futures
Research, AC/UNU Millennium Project.
[2]. Daekook Kang, Wooseok Jang, Hyeonheong
Lee, Hyun Joung No, (2013), A Review on
Technology Forecasting Methods and Their
Application Area, World Academy of Science,
Engineering and Technology.
[3]. Nguyễn Văn Huân, Phạm Việt Bình, (2011),
Phân tích dữ liệu và dự báo kinh tế, Nxb Khoa
học và kỹ thuật.
[4]. Lê Văn Dụy, (2010), Nghiên cứu ứng dụng
một số phương pháp và mô hình dự báo ngắn hạn
để dự báo các chỉ tiêu thống kê xã hội chủ yếu, Đề
tài NCKH Cấp Bộ 2009 – 2010.
[5]. Nguyễn Ngọc Tuyến, (2008), Xây dựng mô
hình phân tích và dự báo các chỉ tiêu kinh tế tài
chính phục vụ công tác phân tích, hoạch định và
điều hành chính sách tài chính, Đề tài NCKH Cấp
Bộ 6/2007 - 5/2008.
[6]. Trần Thị Trâm Anh, (2007), Ứng dựng mô
hình phân tích, dự báo giá một số mặt hàng tư liệu
sản xuất quan trọng ở Việt Nam gian đoạn 2006-
2010, Đề tài NCKH Cấp Bộ 01/05/06 - 01/05/07.
[7]. Bùi Duy Phú, (2010), Xây dựng hàm cầu tiền
của Việt Nam, phân tích & dự báo qua một số mô
hình thực nghiệm, Đề tài NCKH Cấp Ngành,
KNH 2010 – 06.
[8]. Phùng Duy Quang, (2007), Mô hình chuỗi
thời gian dùng để dự báo biến động giá chứng
khoán và áp dụng vào thị trường chứng khoán
Việt Nam, Đề tài Cấp trƣờng Đại học Ngoại
thƣơng, Mã số NT 2007-02.
[9]. Trần Văn Tá, (2003), Phân tích và dự báo
tình hình kinh tế tài chính khu vực và thế giới tác
động đến Việt Nam, Đề tài NCKH Cấp Bộ 2/2002
- 2/2003.
[10]. Phạm Thị Thắng, Phạm Thị Kim Vân,
(2007), Sử dụng các mô hình kinh tế lượng trong
phân tích và dự báo tác động của vốn đầu tư trực
tiếp nước ngoài đối với phát triển kinh tế-xã hội
Việt Nam, Đề tài NCKH Cấp Bộ 01/05/06 -
01/05/07.
[11]. Vũ Xuân Nam, Phạm Việt Bình, Nguyễn
Văn Huân, (2012), Phương pháp hồi quy bội trong
dự báo và ứng dụng vào dự báo doanh thu dịch vụ
viễn thông tại Viễn thông Thái Nguyên, P 87-92,số
102, tập 2 Tạp chí Khoa học và Công nghệ - Đại
học Thái Nguyên.
[12]. Cục Thống kê tỉnh Thái Nguyên, (2012),
Niên giám thống kê Tỉnh Thái Nguyên năm 2011,
Nxb Thống Kê.
[13]. Tổng cục Thống kê Việt Nam, (2012), Niên
giám thống kê Việt Nam năm 2012, Nxb Thống Kê.
[14]. Cục Thống kê tỉnh Thái Nguyên, (2012),
Báo cáo tình hình sản xuất, chế biến, tiêu thụ chè
Tỉnh Thái Nguyên giai đoạn 2000 - 2012, Nxb
Thống Kê.
Ngày nhận bài: 16/7/2013; Ngày phản biện: 29/8/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: TS. Trần Công Nghiệp – Trường Đại học Kinh tế & QTKD – ĐHTN

Trần Viết Khanh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 71 - 78
71
ỨNG DỤNG HỆ THÔNG TIN ĐỊA LÝ
XÂY DỰNG BẢN ĐỒ PHÂN BỐ KHÔNG GIAN ONLINE
Trần Viết Khanh1,*
, Lê Minh Hải2, Nguyễn Lê Duy
3
1Đại học Thái Nguyên; 2NCS Viện Địa lí – Viện Hàn lâm KH&CN Việt Nam 3Trường Đại học Nông Lâm – ĐH Thái Nguyên
TÓM TẮT Quản lý và phân tích không gian là công việc cần thiết để phát triển kinh tế - xã hội trong thế giới
hiện đại. Thông thƣờng việc nghiên cứu phân tích không gian đƣợc thực hiện trên cơ sở xây dựng
và phân tích bản đồ truyền thống. Với sự phát triển công nghệ số, các bản đồ truyền thống dần dần
đƣợc thay thế bằng bản đồ máy tính. Bản đồ trực tuyến là dạng bản đồ máy tính kỹ thuật số đƣợc
xây dựng dựa trên nền web, có khả năng cập nhật cơ sở dữ liệu và khai thác cho nhiều mục đích
khác nhau. Đây là công cụ rất có hiệu quả trong việc phân tích không gian nhờ sự trợ giúp của
công nghệ tiên tiến, đặc biệt là điện toán đám mây. Đối với các cơ quan, trƣờng học phân bố trên
diện tích rộng, việc xây dựng bản đồ trực tuyến sẽ tạo ra khả năng quản lý, phát triển và quy hoạch
không gian cảnh quan một cách linh hoạt, đồng thời nó cũng tạo nên thế mạnh trong việc hoạch
định kế hoạch chiến lƣợc phát triển đơn vị. Trong quá trình xây dựng bản đồ trực tuyến quản lý
không gian Đại học Thái Nguyên chúng tôi đã lựa chọn xây dựng bản đồ trực tuyến cho một số
đơn vị thành viên. Trong khuân khổ bài bào chúng tôi giới thiệu công nghệ, quy trình biên tập,
thành lập bản đồ trực tuyến cho Trƣờng Đại học Sƣ phạm thuộc Đại học Thái Nguyên.
Từ khoá: Bản đồ; trực tuyến; hệ thống thông tin địa lí; GIS; Google Maps.
ĐẶT VẤN ĐỀ*
Bản đồ trực tuyến với sự trợ giúp của
Googgle Maps hiện đang phát triển nhanh
chóng và đƣợc ứng dụng trên nhiều lĩnh vực,
trong đó có giáo dục. Google Maps cung cấp
dịch vụ biên tập ứng dụng bản đồ trực tuyến
miễn phí. Các sản phẩm ứng dụng bản đồ trực
tuyến của Google Maps đƣợc giới thiệu tại
địa chỉ: https://developers.google.com, trong
số đó các ứng dụng bản đồ không gian cho
các cơ quan, trƣờng học chiếm đa số.
Xây dựng bản đồ trực tuyến không gian cho
một cơ quan, một trƣờng học cần đảm bảo
một số yêu cầu khi thể hiện về các phân khu
chức năng nhƣ: tọa độ địa lý, thông tin các
phân khu (nhà hiệu bộ, phòng học, giảng
đƣờng, phòng thí nghiệm, công viên, sân vận
động, cây xanh, dịch vụ... cùng với các dữ
liệu về hình dạng, kích thƣớc, diện tích, sức
chứa, mật độ,… Các thông tin này sẽ đƣợc
tìm thấy khi ngƣời dùng truy cập vào bản đồ
trực tuyến. Mô hình này có thể phát triển để
áp dụng cho các cơ quan, đơn vị trong quá
trình quản lý và quy hoạch không gian.
* Tel: 0912187118
KẾT QUẢ NGHIÊN CỨU VÀ THẢO LUẬN
Lựa chọn công nghệ và phần mềm ứng dụng
Một số dịch vụ công nghệ, tên phần mềm đƣợc sử dụng khi tiến hành nhiệm vụ biên tập, xây dựng bản đồ trực tuyến trên Google Maps đƣợc thể hiện trên bảng 1.
XÂY DỰNG BẢN ĐỒ PHÂN BỐ KHÔNG GIAN ONLINE (LẤY VÍ DỤ CHO MỘT ĐỐI TƢỢNG CỤ THỂ LÀ TRƢỜNG ĐẠI HỌC SƢ PHẠM THUỘC ĐẠI HỌC THÁI NGUYÊN)
Vị trí địa lí khu vực nghiên cứu
- Trƣờng Đại học Sƣ phạm (ĐHSP) thuộc Đại học Thái Nguyên (ĐHTN) nằm trên địa phận phƣờng Quang Trung - Thành phố Thái Nguyên. Giới hạn khung kinh, vĩ độ địa lí đƣợc thể hiện trên bảng 2.
- Trong quy hoạch phát triển các phân khu thuộc ĐHTN, Trƣờng ĐHSP thuộc phân khu I, gần trung tâm Thành phố Thái Nguyên. Trƣờng tiếp giáp các trục đƣờng chính: phía bắc giáp đƣờng đê Mỏ Bạch, phía Nam giáp đƣờng Lê Quý Đôn, phía Tây giáp đƣờng Lƣơng Thế Vinh, phía đông giáp đƣờng Lƣơng Ngọc Quyến. Cổng chính của trƣờng mở về phía Đông trên trục đƣờng Lƣơng Ngọc Quyến và một cổng phụ phía nam trên trục đƣờng Lê Quý Đôn.
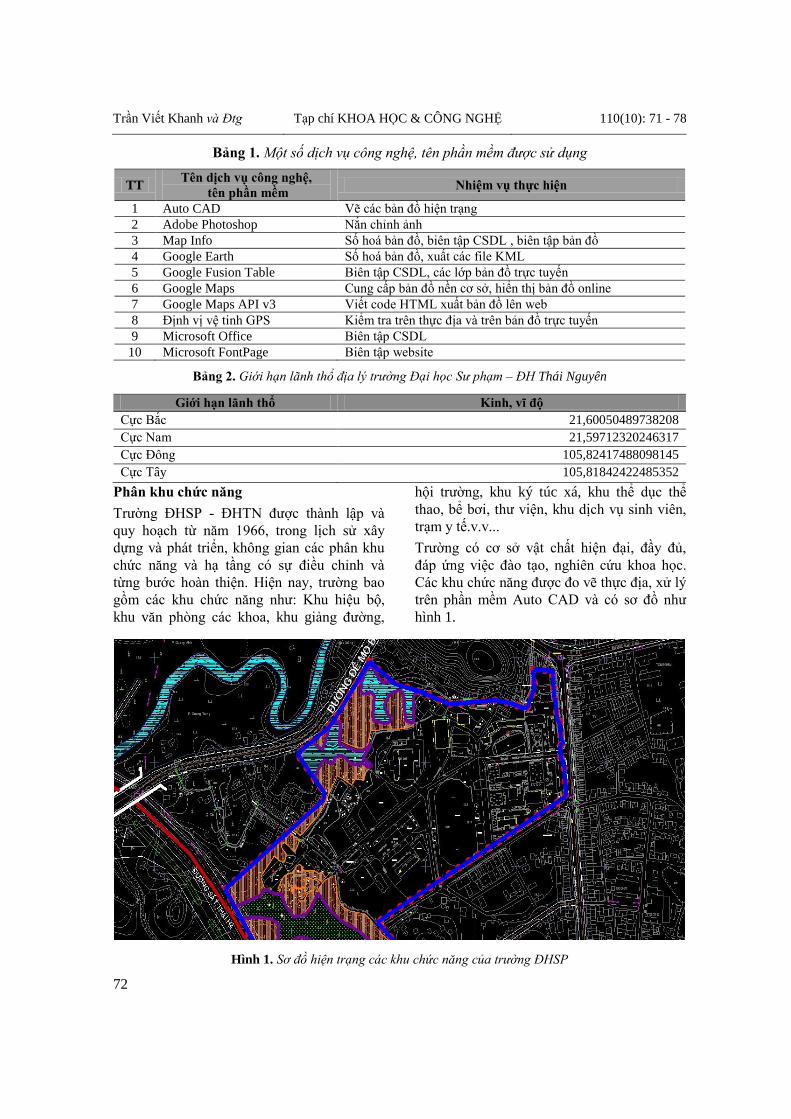
Trần Viết Khanh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 71 - 78
72
Bảng 1. Một số dịch vụ công nghệ, tên phần mềm được sử dụng
TT Tên dịch vụ công nghệ,
tên phần mềm Nhiệm vụ thực hiện
1 Auto CAD Vẽ các bản đồ hiện trạng
2 Adobe Photoshop Nắn chỉnh ảnh
3 Map Info Số hoá bản đồ, biên tập CSDL , biên tập bản đồ
4 Google Earth Số hoá bản đồ, xuất các file KML
5 Google Fusion Table Biên tập CSDL, các lớp bản đồ trực tuyến
6 Google Maps Cung cấp bản đồ nền cơ sở, hiển thị bản đồ online
7 Google Maps API v3 Viết code HTML xuất bản đồ lên web
8 Định vị vệ tinh GPS Kiểm tra trên thực địa và trên bản đồ trực tuyến
9 Microsoft Office Biên tập CSDL
10 Microsoft FontPage Biên tập website
Bảng 2. Giới hạn lãnh thổ địa lý trường Đại học Sư phạm – ĐH Thái Nguyên
Giới hạn lãnh thổ Kinh, vĩ độ
Cực Bắc 21,60050489738208
Cực Nam 21,59712320246317
Cực Đông 105,82417488098145
Cực Tây 105,81842422485352
Phân khu chức năng
Trƣờng ĐHSP - ĐHTN đƣợc thành lập và
quy hoạch từ năm 1966, trong lịch sử xây
dựng và phát triển, không gian các phân khu
chức năng và hạ tầng có sự điều chỉnh và
từng bƣớc hoàn thiện. Hiện nay, trƣờng bao
gồm các khu chức năng nhƣ: Khu hiệu bộ,
khu văn phòng các khoa, khu giảng đƣờng,
hội trƣờng, khu ký túc xá, khu thể dục thể
thao, bể bơi, thƣ viện, khu dịch vụ sinh viên,
trạm y tế.v.v...
Trƣờng có cơ sở vật chất hiện đại, đầy đủ,
đáp ứng việc đào tạo, nghiên cứu khoa học.
Các khu chức năng đƣợc đo vẽ thực địa, xử lý
trên phần mềm Auto CAD và có sơ đồ nhƣ
hình 1.
Hình 1. Sơ đồ hiện trạng các khu chức năng của trường ĐHSP
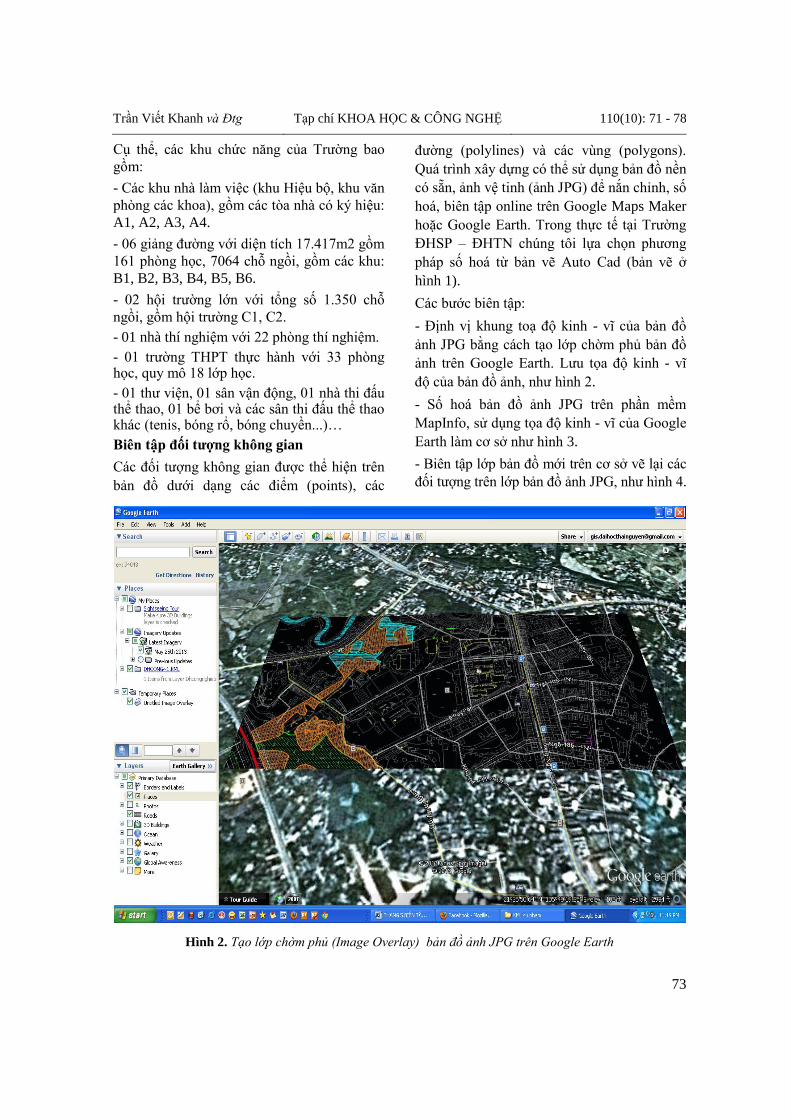
Trần Viết Khanh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 71 - 78
73
Cụ thể, các khu chức năng của Trƣờng bao
gồm:
- Các khu nhà làm việc (khu Hiệu bộ, khu văn
phòng các khoa), gồm các tòa nhà có ký hiệu:
A1, A2, A3, A4.
- 06 giảng đƣờng với diện tích 17.417m2 gồm
161 phòng học, 7064 chỗ ngồi, gồm các khu:
B1, B2, B3, B4, B5, B6.
- 02 hội trƣờng lớn với tổng số 1.350 chỗ
ngồi, gồm hội trƣờng C1, C2.
- 01 nhà thí nghiệm với 22 phòng thí nghiệm.
- 01 trƣờng THPT thực hành với 33 phòng học, quy mô 18 lớp học.
- 01 thƣ viện, 01 sân vận động, 01 nhà thi đấu thể thao, 01 bể bơi và các sân thi đấu thể thao khác (tenis, bóng rổ, bóng chuyền...)…
Biên tập đối tƣợng không gian
Các đối tƣợng không gian đƣợc thể hiện trên
bản đồ dƣới dạng các điểm (points), các
đƣờng (polylines) và các vùng (polygons).
Quá trình xây dựng có thể sử dụng bản đồ nền
có sẵn, ảnh vệ tinh (ảnh JPG) để nắn chỉnh, số
hoá, biên tập online trên Google Maps Maker
hoặc Google Earth. Trong thực tế tại Trƣờng
ĐHSP – ĐHTN chúng tôi lựa chọn phƣơng
pháp số hoá từ bản vẽ Auto Cad (bản vẽ ở
hình 1).
Các bƣớc biên tập:
- Định vị khung toạ độ kinh - vĩ của bản đồ
ảnh JPG bằng cách tạo lớp chờm phủ bản đồ
ảnh trên Google Earth. Lƣu tọa độ kinh - vĩ
độ của bản đồ ảnh, nhƣ hình 2.
- Số hoá bản đồ ảnh JPG trên phần mềm
MapInfo, sử dụng tọa độ kinh - vĩ của Google
Earth làm cơ sở nhƣ hình 3.
- Biên tập lớp bản đồ mới trên cơ sở vẽ lại các
đối tƣợng trên lớp bản đồ ảnh JPG, nhƣ hình 4.
Hình 2. Tạo lớp chờm phủ (Image Overlay) bản đồ ảnh JPG trên Google Earth
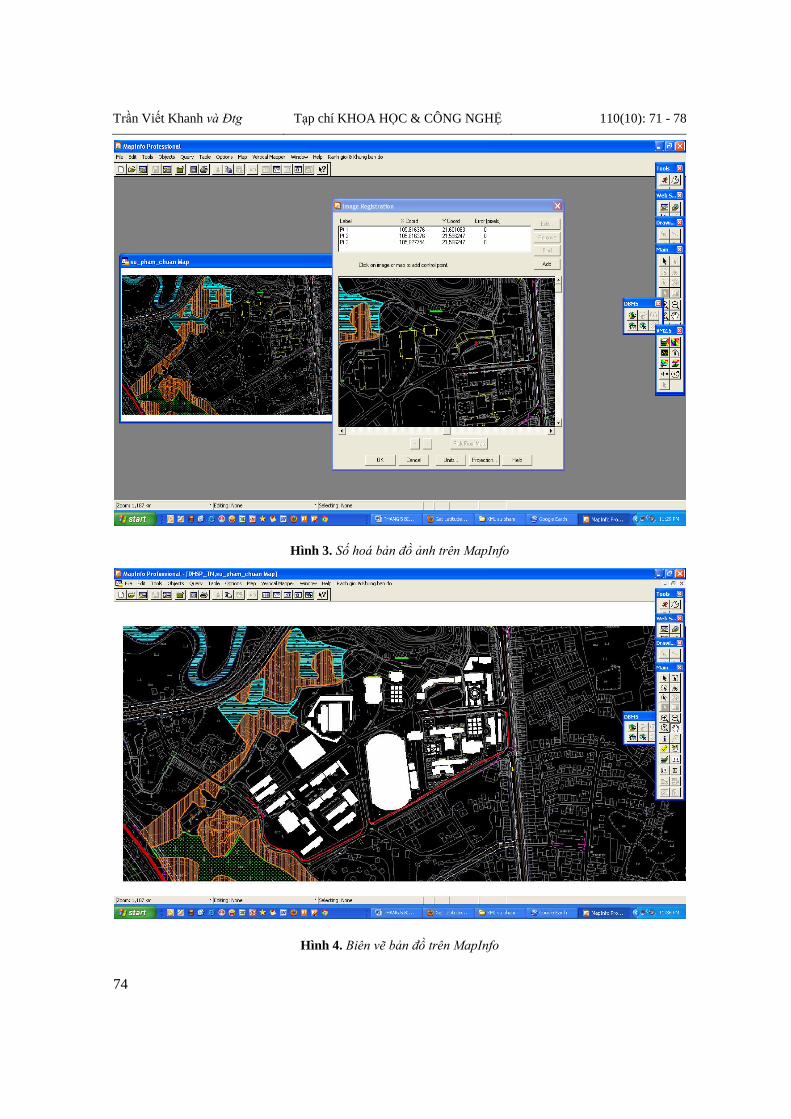
Trần Viết Khanh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 71 - 78
74
Hình 3. Số hoá bản đồ ảnh trên MapInfo
Hình 4. Biên vẽ bản đồ trên MapInfo
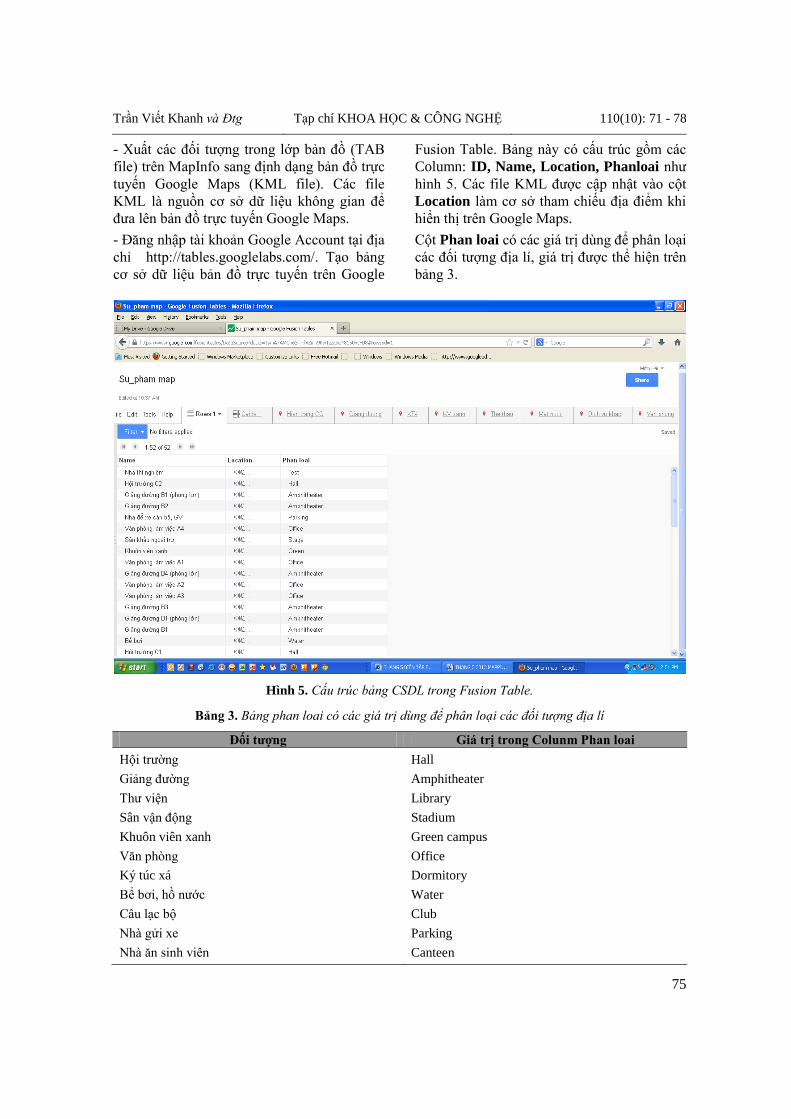
Trần Viết Khanh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 71 - 78
75
- Xuất các đối tƣợng trong lớp bản đồ (TAB
file) trên MapInfo sang định dạng bản đồ trực
tuyến Google Maps (KML file). Các file
KML là nguồn cơ sở dữ liệu không gian để
đƣa lên bản đồ trực tuyến Google Maps.
- Đăng nhập tài khoản Google Account tại địa
chỉ http://tables.googlelabs.com/. Tạo bảng
cơ sở dữ liệu bản đồ trực tuyến trên Google
Fusion Table. Bảng này có cấu trúc gồm các
Column: ID, Name, Location, Phanloai nhƣ
hình 5. Các file KML đƣợc cập nhật vào cột
Location làm cơ sở tham chiếu địa điểm khi
hiển thị trên Google Maps.
Cột Phan loai có các giá trị dùng để phân loại
các đối tƣợng địa lí, giá trị đƣợc thể hiện trên
bảng 3.
Hình 5. Cấu trúc bảng CSDL trong Fusion Table.
Bảng 3. Bảng phan loai có các giá trị dùng để phân loại các đối tượng địa lí
Đối tƣợng Giá trị trong Colunm Phan loai
Hội trƣờng
Giảng đƣờng
Thƣ viện
Sân vận động
Khuôn viên xanh
Văn phòng
Ký túc xá
Bể bơi, hồ nƣớc
Câu lạc bộ
Nhà gửi xe
Nhà ăn sinh viên
Hall
Amphitheater
Library
Stadium
Green campus
Office
Dormitory
Water
Club
Parking
Canteen
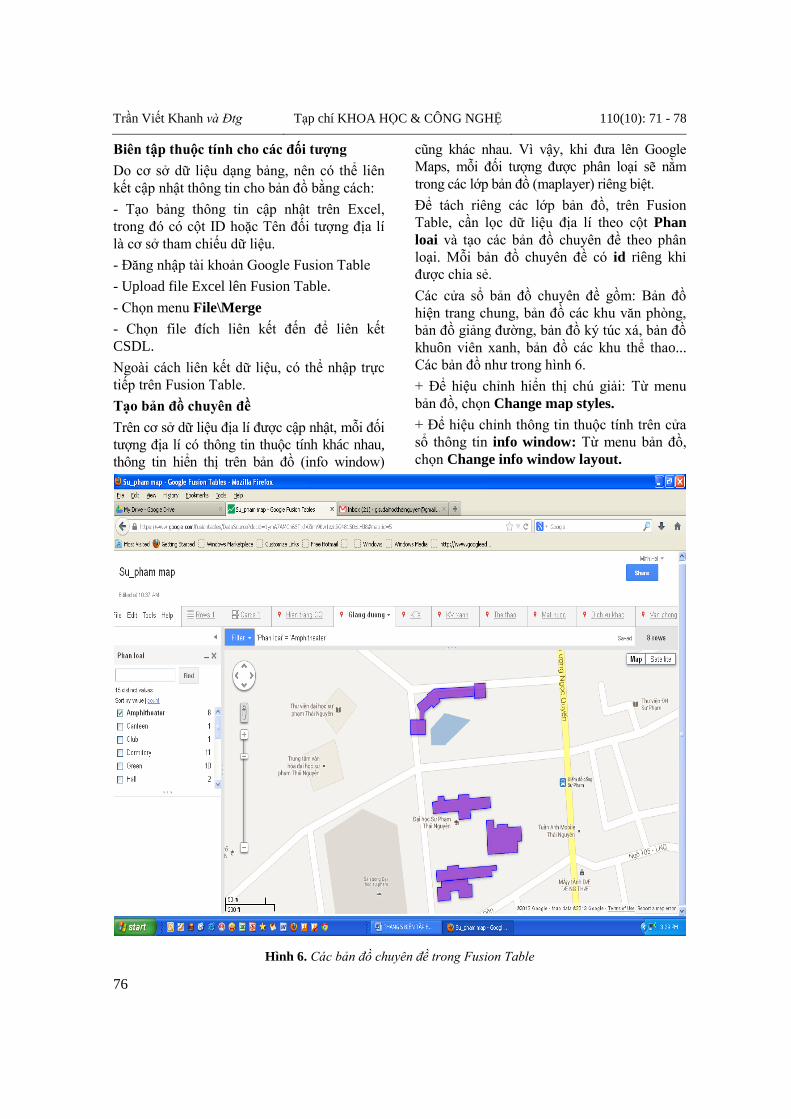
Trần Viết Khanh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 71 - 78
76
Biên tập thuộc tính cho các đối tƣợng
Do cơ sở dữ liệu dạng bảng, nên có thể liên
kết cập nhật thông tin cho bản đồ bằng cách:
- Tạo bảng thông tin cập nhật trên Excel,
trong đó có cột ID hoặc Tên đối tƣợng địa lí
là cơ sở tham chiếu dữ liệu.
- Đăng nhập tài khoản Google Fusion Table
- Upload file Excel lên Fusion Table.
- Chọn menu File\Merge
- Chọn file đích liên kết đến để liên kết
CSDL.
Ngoài cách liên kết dữ liệu, có thể nhập trực
tiếp trên Fusion Table.
Tạo bản đồ chuyên đề
Trên cơ sở dữ liệu địa lí đƣợc cập nhật, mỗi đối
tƣợng địa lí có thông tin thuộc tính khác nhau,
thông tin hiển thị trên bản đồ (info window)
cũng khác nhau. Vì vậy, khi đƣa lên Google
Maps, mỗi đối tƣợng đƣợc phân loại sẽ nằm
trong các lớp bản đồ (maplayer) riêng biệt.
Để tách riêng các lớp bản đồ, trên Fusion
Table, cần lọc dữ liệu địa lí theo cột Phan
loai và tạo các bản đồ chuyên đề theo phân
loại. Mỗi bản đồ chuyên đề có id riêng khi
đƣợc chia sẻ.
Các cửa sổ bản đồ chuyên đề gồm: Bản đồ
hiện trang chung, bản đồ các khu văn phòng,
bản đồ giảng đƣờng, bản đồ ký túc xá, bản đồ
khuôn viên xanh, bản đồ các khu thể thao...
Các bản đồ nhƣ trong hình 6.
+ Để hiệu chỉnh hiển thị chú giải: Từ menu
bản đồ, chọn Change map styles.
+ Để hiệu chỉnh thông tin thuộc tính trên cửa
sổ thông tin info window: Từ menu bản đồ,
chọn Change info window layout.
Hình 6. Các bản đồ chuyên đề trong Fusion Table
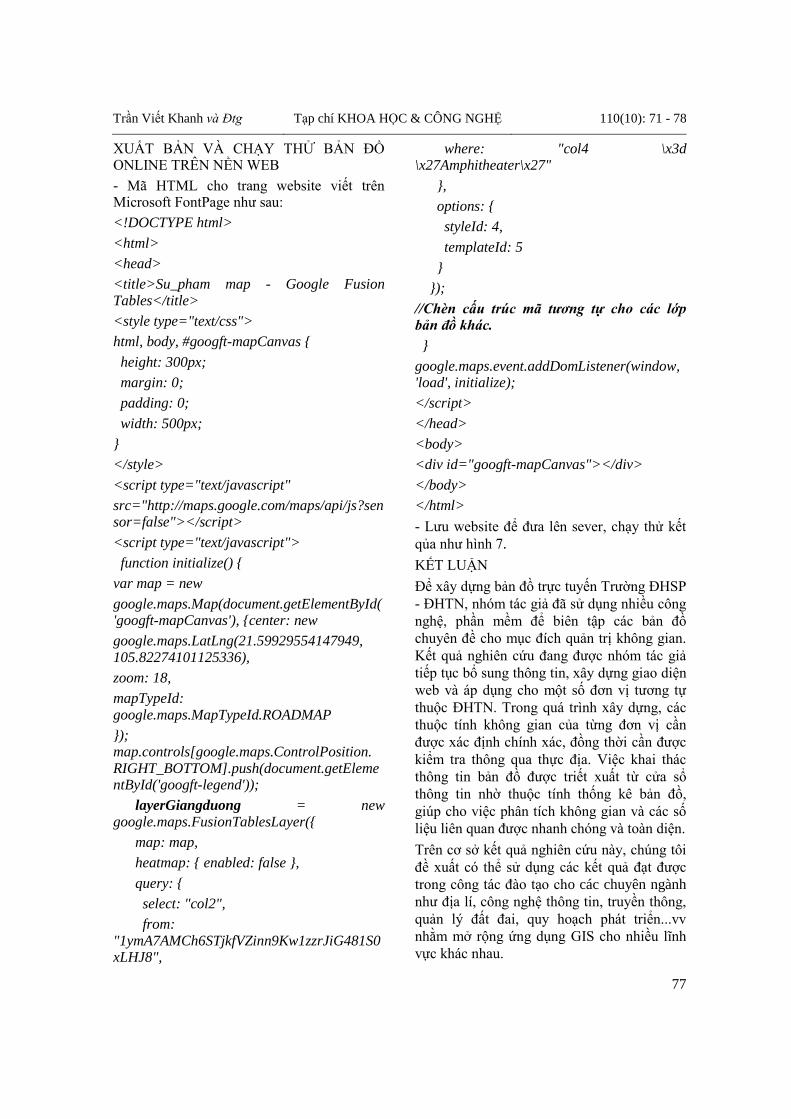
Trần Viết Khanh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 71 - 78
77
XUẤT BẢN VÀ CHẠY THỬ BẢN ĐỒ ONLINE TRÊN NỀN WEB
- Mã HTML cho trang website viết trên Microsoft FontPage nhƣ sau:
<!DOCTYPE html>
<html>
<head>
<title>Su_pham map - Google Fusion Tables</title>
<style type="text/css">
html, body, #googft-mapCanvas {
height: 300px;
margin: 0;
padding: 0;
width: 500px;
}
</style>
<script type="text/javascript"
src="http://maps.google.com/maps/api/js?sensor=false"></script>
<script type="text/javascript">
function initialize() {
var map = new
google.maps.Map(document.getElementById('googft-mapCanvas'), {center: new
google.maps.LatLng(21.59929554147949, 105.82274101125336),
zoom: 18,
mapTypeId: google.maps.MapTypeId.ROADMAP
}); map.controls[google.maps.ControlPosition. RIGHT_BOTTOM].push(document.getElementById('googft-legend'));
layerGiangduong = new google.maps.FusionTablesLayer({
map: map,
heatmap: { enabled: false },
query: {
select: "col2",
from: "1ymA7AMCh6STjkfVZinn9Kw1zzrJiG481S0xLHJ8",
where: "col4 \x3d \x27Amphitheater\x27"
},
options: {
styleId: 4,
templateId: 5
}
});
//Chèn cấu trúc mã tương tự cho các lớp
bản đồ khác.
}
google.maps.event.addDomListener(window, 'load', initialize);
</script>
</head>
<body>
<div id="googft-mapCanvas"></div>
</body>
</html>
- Lƣu website để đƣa lên sever, chạy thử kết
qủa nhƣ hình 7.
KẾT LUẬN
Để xây dựng bản đồ trực tuyến Trƣờng ĐHSP
- ĐHTN, nhóm tác giả đã sử dụng nhiều công
nghệ, phần mềm để biên tập các bản đồ
chuyên đề cho mục đích quản trị không gian.
Kết quả nghiên cứu đang đƣợc nhóm tác giả
tiếp tục bổ sung thông tin, xây dựng giao diện
web và áp dụng cho một số đơn vị tƣơng tự
thuộc ĐHTN. Trong quá trình xây dựng, các
thuộc tính không gian của từng đơn vị cần
đƣợc xác định chính xác, đồng thời cần đƣợc
kiểm tra thông qua thực địa. Việc khai thác
thông tin bản đồ đƣợc triết xuất từ cửa sổ
thông tin nhờ thuộc tính thống kê bản đồ,
giúp cho việc phân tích không gian và các số
liệu liên quan đƣợc nhanh chóng và toàn diện.
Trên cơ sở kết quả nghiên cứu này, chúng tôi
đề xuất có thể sử dụng các kết quả đạt đƣợc
trong công tác đào tạo cho các chuyên ngành
nhƣ địa lí, công nghệ thông tin, truyền thông,
quản lý đất đai, quy hoạch phát triển...vv
nhằm mở rộng ứng dụng GIS cho nhiều lĩnh
vực khác nhau.
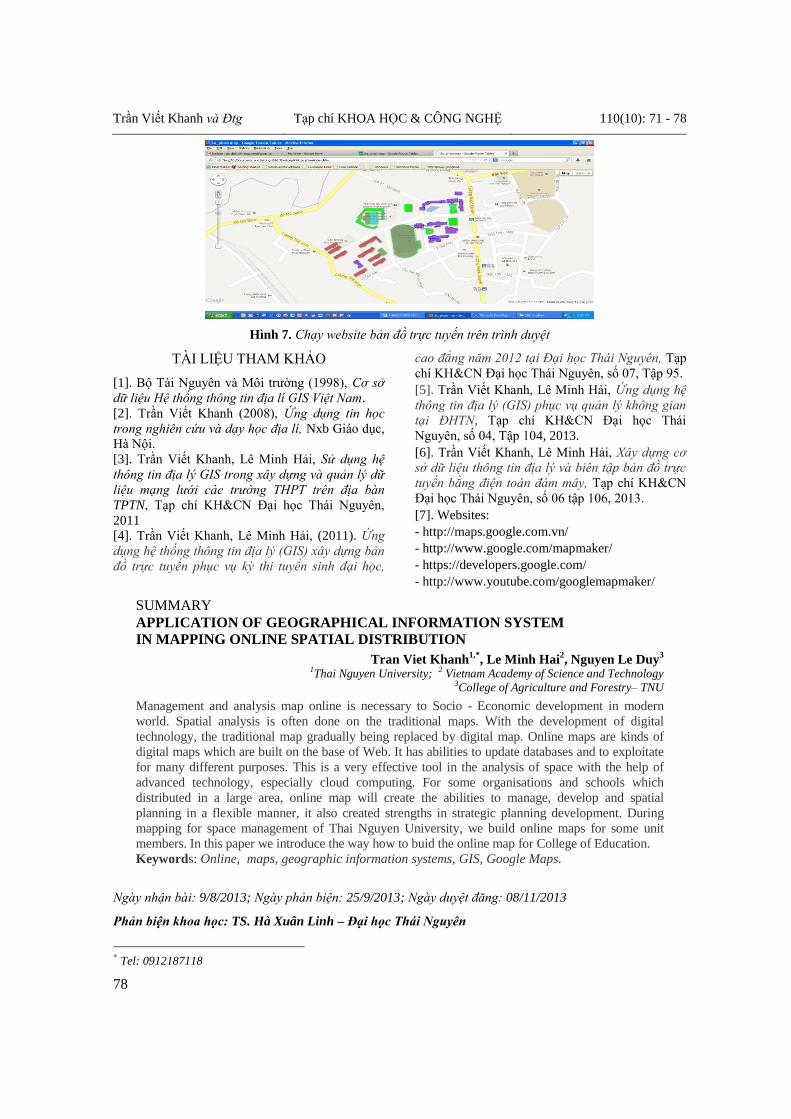
Trần Viết Khanh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 71 - 78
78
Hình 7. Chạy website bản đồ trực tuyến trên trình duyệt
TÀI LIỆU THAM KHẢO
[1]. Bộ Tài Nguyên và Môi trƣờng (1998), Cơ sở
dữ liệu Hệ thống thông tin địa lí GIS Việt Nam.
[2]. Trần Viết Khanh (2008), Ứng dụng tin học
trong nghiên cứu và dạy học địa lí, Nxb Giáo dục,
Hà Nội.
[3]. Trần Viết Khanh, Lê Minh Hải, Sử dụng hệ
thông tin địa lý GIS trong xây dựng và quản lý dữ
liệu mạng lưới các trường THPT trên địa bàn
TPTN, Tạp chí KH&CN Đại học Thái Nguyên,
2011
[4]. Trần Viết Khanh, Lê Minh Hải, (2011). Ứng
dụng hệ thống thông tin địa lý (GIS) xây dựng bản
đồ trực tuyến phục vụ kỳ thi tuyển sinh đại học,
cao đẳng năm 2012 tại Đại học Thái Nguyên, Tạp
chí KH&CN Đại học Thái Nguyên, số 07, Tập 95.
[5]. Trần Viết Khanh, Lê Minh Hải, Ứng dụng hệ
thông tin địa lý (GIS) phục vụ quản lý không gian
tại ĐHTN, Tạp chí KH&CN Đại học Thái
Nguyên, số 04, Tập 104, 2013.
[6]. Trần Viết Khanh, Lê Minh Hải, Xây dựng cơ
sở dữ liệu thông tin địa lý và biên tập bản đồ trực
tuyến bằng điện toán đám mây, Tạp chí KH&CN
Đại học Thái Nguyên, số 06 tập 106, 2013.
[7]. Websites:
- http://maps.google.com.vn/
- http://www.google.com/mapmaker/
- https://developers.google.com/
- http://www.youtube.com/googlemapmaker/
SUMMARY
APPLICATION OF GEOGRAPHICAL INFORMATION SYSTEM
IN MAPPING ONLINE SPATIAL DISTRIBUTION
Tran Viet Khanh1,*
, Le Minh Hai2, Nguyen Le Duy
3
1Thai Nguyen University; 2 Vietnam Academy of Science and Technology 3College of Agriculture and Forestry– TNU
Management and analysis map online is necessary to Socio - Economic development in modern
world. Spatial analysis is often done on the traditional maps. With the development of digital
technology, the traditional map gradually being replaced by digital map. Online maps are kinds of
digital maps which are built on the base of Web. It has abilities to update databases and to exploitate
for many different purposes. This is a very effective tool in the analysis of space with the help of
advanced technology, especially cloud computing. For some organisations and schools which
distributed in a large area, online map will create the abilities to manage, develop and spatial
planning in a flexible manner, it also created strengths in strategic planning development. During
mapping for space management of Thai Nguyen University, we build online maps for some unit
members. In this paper we introduce the way how to buid the online map for College of Education.
Keywords: Online, maps, geographic information systems, GIS, Google Maps.
Ngày nhận bài: 9/8/2013; Ngày phản biện: 25/9/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: TS. Hà Xuân Linh – Đại học Thái Nguyên
* Tel: 0912187118

Hà Anh Tuấn và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 79 - 87
79
NGHIÊN CỨU XÂY DỰNG CƠ SỞ DỮ LIỆU PHÂN TẦNG ĐỊA HÌNH
HUYỆN ĐỊNH HÓA - TỈNH THÁI NGUYÊN TỪ HỆ THỐNG DỮ LIỆU
ĐỘ CAO TOÀN THẾ GIỚI ASTERGDEM
Hà Anh Tuấn
*, Trƣơng Thành Nam,
Hoàng Văn Hùng, VƣơngVân Huyền, Ma Thị Trang
Trường Đại học Nông Lâm – ĐH Thái Nguyên
TÓM TẮT Đề tài đã sử dụng nguồn dữ liệu độ cao trực tuyến đƣợc cung cấp bởi ASTER GDEM nghiên cứu
xây dựng cơ sở dữ liệu phân tầng địa hình, kết quả nghiên cứu đã xây dựng đƣợc hệ thống bản đồ
và dữ liệu phân tầng nền địa hình gồm bản đồ phân tầng địa hình, mô hình số độ cao (DEM) khu
vực huyện Định Hóa tỉnh Thái Nguyên. Cấu trúc phân tầng địa hình khu vực nghiên cứu đƣợc xác
định trong khoảng cao đều giữa các tầng địa hình là 100m với 9 cấp địa hình từ 1 cho đến 9. Số
khoanh phân tích xác định đƣợc là 626 khoanh với tổng diện tích 52970,23ha, đã xác định đƣợc số
khoanh đất lớn nhất là 175 khoanh có độ cao trung bình là 100m, số khoanh nhỏ nhất là 3 có
khoảng độ cao trung bình từ 800 - 900m. Kết quả nghiên cứu của đề tài là một trong những chỉ
tiêu đơn tính cho việc phân hạng thích nghi đất đai, lập quy hoạch phát triển sản xuất nông nghiệp,
bố trí giống cây trồng có tính thích nghi với độ cao tuyệt đối trên toàn địa bàn huyện Định Hóa
tỉnh Thái Nguyên và nghiên cứu này có thể áp dụng tốt cho các khu vực khác.
Từ khóa: ASTER GDEM, Cơ sở dữ liệu nền địa hình, Định Hóa, DEM, phân tầng địa hình.
ĐẶT VẤN ĐỀ*
Mô hình số độ cao Digital Elevation Model
(DEM) là sự biểu thị bằng số sự thay đổi liên
tục của độ cao trong không gian, nó có thể là
độ cao tuyệt đối của các điểm trên bề mặt trái
đất, độ cao của các tầng đất hoặc của mực
nƣớc ngầm [2].
DEM có nhiều ứng dựng trong thực tiễn nhƣ
xây dựng dữ liệu bản đồ số địa hình trong các
cơ sở dữ liệu quốc gia, tính toán và thành lập
bản đồ độ dốc, bản đồ hƣớng dốc, bản đồ
hình dạng mái dốc để từ đó thành lập ảnh địa
hình trực quan có hình bóng. Ứng dụng trong
nghiên cứu tầng địa chất hay dự báo khả năng
xói mòn đất và dòng chảy mặt v.v...[6]
ASTER GDEM đƣợc phát triển lần thứ 2 vào
năm 2011, sử dụng một thuật toán tiên tiến để
cải thiện mô hình toàn cầu số độ cao, tăng độ
phân giải và độ chính xác theo chiều ngang và
chiều dọc của thiết bị quan sát. Độ chính xác
của phiên bản mới nhất này đƣợc xác nhận
bởi sự nỗ lực hợp tác giữa Bộ Kinh tế,
Thƣơng mại - Công nghiệp Nhật Bản và Cơ
* Tel: 0913455882; Email: [email protected]
quan Hàng không - Vũ trụ Hoa Kỳ (NASA),
trong đó cho thấy những cải tiến đáng kể so
với trƣớc đây. ASTER GDEM phiên bản 2
chính thức đƣợc phát hành vào 10/2011 cung
cấp dữ liệu có sẵn miễn phí cho ngƣời dùng
trên toàn thế giới.
Định Hoá là một huyện miền núi nằm ở phía
Tây - Tây Bắc của tỉnh Thái Nguyên, với tổng
diện tích đất tự nhiên 52970.23, địa hình phức
tạp, độ dốc cao, hiệu quả sử dụng đất chính vì
vậy còn nhiều hạn chế [1]. Với trên 80% dân
số của huyện làm nông nghiệp, các hoạt động
sản xuất nông nghiệp đang có ảnh hƣởng trực
tiếp đến đời sống của ngƣời dân trong toàn
huyện [1].
Việc nghiên cứu xây dựng bản đồ và cơ sở dữ
liệu địa hình, thổ nhƣỡng và các yếu tố có liên
quan đến đất đai cả nƣớc nói chung và huyện
Định Hóa nói riêng đóng vai trò hết sức quan
trọng trong quy hoạch sử dụng đất, quy hoạch
nông nghiệp để sử dụng đất hiệu quả và lâu bền.
Nghiên cứu tiến hành xác định quy trình thực
hiện khai thác số liệu từ hệ thống ASTER
GDEM, khai thác mô hình số độ cao từ hệ
thống dữ liệu độ cao toàn thế giới ASTER
Hà Anh Tuấn và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 79 - 87
80
GDEM và xây dựng cơ sở dữ liệu phân tầng địa
hình huyện Định Hóa tỉnh Thái Nguyên và đánh
giá khả năng phân tích, khai thác cơ sở dữ liệu
địa hình, huyện Định Hóa tỉnh Thái Nguyên.
VẬT LIỆU, NỘI DUNG VÀ PHƢƠNG
PHÁP NGHIÊN CỨU
Vật liệu nghiên cứu
- Bản đồ địa hình huyện Định Hóa, Bản đồ
Hiện trạng sử dụng đất huyện Định Hóa năm
2012, Bản đồ Địa giới hành chính huyện Định
Hóa.
- Các phần mềm sử dụng nghiên cứu: Phần
mềm Mapinfo Professtional V.11
- Máy GPS cầm tay
Nội dung nghiên cứu
- Điều kiện tự nhiên – kinh tế xã hội huyện
Định Hóa
- Xác định quy trình thực hiện khai thác số
liệu từ hệ thống ASTER GDEM
- Khai thác mô hình số độ cao từ hệ thống dữ
liệu độ cao toàn thế giới ASTER GDEM và
xây dựng cơ sở dữ liệu phân tầng địa hình
huyện Định Hóa tỉnh Thái Nguyên
- Đánh giá khả năng, phân tích, khai thác cơ
sở dữ liệu địa hình, huyện Định Hóa tỉnh Thái
Nguyên.
Phƣơng pháp nghiên cứu
* Phƣơng pháp thu thập số liệu
- Thu thập cơ sở dữ liệu không gian:
+ Bản đồ hiện trạng sử dụng đất, địa chính,
địa hình, giao thông, bản đồ địa giới hành
chính 364/CT v.v…
+ Khai thác dữ liệu từ hệ thống dữ liệu độ cao
toàn thế giới ASTER GDEM
- Phân tích cơ sở dữ liệu không gian: Sử dụng
phần mềm Vetical Mapper và phần mềm
Mapinfo Professional V.11
-Thu thập cơ sở dữ liệu thuộc tính:
+ Điều kiện tự nhiên, tài nguyên thiên nhiên
+ Điều kiện kinh tế - xã hội
+ Hệ thống cơ sở hạ tầng kỹ thuật và xã hội
+ Tình hình quản lý tại khu vực nghiên cứu
- Số liệu khác có liên quan:
+ Thu thập các quyết định, quy định, tài liệu
hƣớng dẫn thực hiện, các công trình nghiên
cứu có liên quan.
+ Điều tra, khảo sát, đối chiếu thực địa nhằm
xác minh độ chính xác của các tài liệu, số liệu
đã thu thập đƣợc, kiểm tra kết quả xây dựng
và chính xác hóa các thông tin về nội dung đã
thu thập và xây dựng đƣợc.
* Phƣơng pháp xây dựng cơ sở dữ liệu bản
đồ: Biên tập các bản đồ chuyên đề bằng phần
mềm Mapinfo
* Phƣơng pháp thống kê, xử lý số liệu: Sử
dụng phần mềm Mapinfo, modul Vertical
Mapper phân tích, chồng ghép, chia tách
thông tin và phân tích mối quan hệ không
gian của các đối tƣợng.
* Phƣơng pháp chuyên gia: Tham khảo ý kiến
các chuyên gia trong các lĩnh vực GIS, xây
dựng bản đồ, quản lý tài nguyên đất v.v…
* Phƣơng pháp sử dụng GPS: Đối chiếu vị trí,
so sánh dữ liệu ngoài thực địa bằng máy GPS
cầm tay
KẾT QUẢ NGHIÊN CỨU
Xác định các bƣớc thực hiện khai thác số
liệu từ hệ thống ASTER GDEM.
Bƣớc 1. Thu thập các tài liệu xác định về địa
giới hành chính của huyện, xác định cơ sở
toán học bản đồ, hệ tọa độ và kinh tuyến trục
của khu vực nghiên cứu, thu thập các nguồn
tài liệu bản đồ dạng số (Digital) hiện có, tiến
hành khai thác mô hình dữ liệu độ cao (DEM)
từ nguồn dữ liệu trực tuyến do ASTER
GDEM bằng phần mềm Global Mapper.
Bƣớc 2. Chuyển đổi nguồn dữ liệu độ cao,
xây dựng danh mục, chuẩn hóa dữ liệu trên
phần mềm Mapinfo Professional và phần
mềm Vetical Mapper
Bƣớc 3. Biên tập, chuẩn hóa dữ liệu, hoàn
thiện
Bƣớc 4. Kiểm tra, thống kê dữ liệu và đối soát
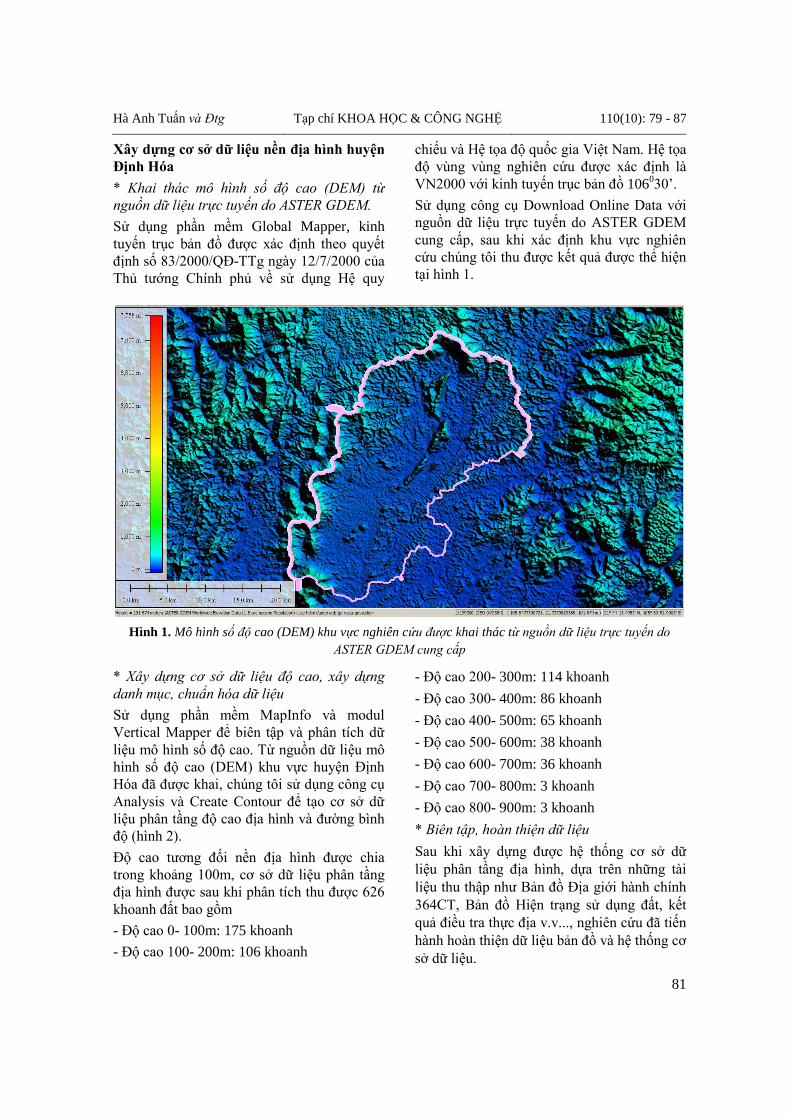
Hà Anh Tuấn và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 79 - 87
81
Xây dựng cơ sở dữ liệu nền địa hình huyện
Định Hóa
* Khai thác mô hình số độ cao (DEM) từ
nguồn dữ liệu trực tuyến do ASTER GDEM.
Sử dụng phần mềm Global Mapper, kinh
tuyến trục bản đồ đƣợc xác định theo quyết
định số 83/2000/QĐ-TTg ngày 12/7/2000 của
Thủ tƣớng Chính phủ về sử dụng Hệ quy
chiếu và Hệ tọa độ quốc gia Việt Nam. Hệ tọa
độ vùng vùng nghiên cứu đƣợc xác định là
VN2000 với kinh tuyến trục bản đồ 106030’.
Sử dụng công cụ Download Online Data với
nguồn dữ liệu trực tuyến do ASTER GDEM
cung cấp, sau khi xác định khu vực nghiên
cứu chúng tôi thu đƣợc kết quả đƣợc thể hiện
tại hình 1.
Hình 1. Mô hình số độ cao (DEM) khu vực nghiên cứu được khai thác từ nguồn dữ liệu trực tuyến do
ASTER GDEM cung cấp
* Xây dựng cơ sở dữ liệu độ cao, xây dựng
danh mục, chuẩn hóa dữ liệu
Sử dụng phần mềm MapInfo và modul
Vertical Mapper để biên tập và phân tích dữ
liệu mô hình số độ cao. Từ nguồn dữ liệu mô
hình số độ cao (DEM) khu vực huyện Định
Hóa đã đƣợc khai, chúng tôi sử dụng công cụ
Analysis và Create Contour để tạo cơ sở dữ
liệu phân tầng độ cao địa hình và đƣờng bình
độ (hình 2).
Độ cao tƣơng đối nền địa hình đƣợc chia
trong khoảng 100m, cơ sở dữ liệu phân tầng
địa hình đƣợc sau khi phân tích thu đƣợc 626
khoanh đất bao gồm
- Độ cao 0- 100m: 175 khoanh
- Độ cao 100- 200m: 106 khoanh
- Độ cao 200- 300m: 114 khoanh
- Độ cao 300- 400m: 86 khoanh
- Độ cao 400- 500m: 65 khoanh
- Độ cao 500- 600m: 38 khoanh
- Độ cao 600- 700m: 36 khoanh
- Độ cao 700- 800m: 3 khoanh
- Độ cao 800- 900m: 3 khoanh
* Biên tập, hoàn thiện dữ liệu
Sau khi xây dựng đƣợc hệ thống cơ sở dữ
liệu phân tầng địa hình, dựa trên những tài
liệu thu thập nhƣ Bản đồ Địa giới hành chính
364CT, Bản đồ Hiện trạng sử dụng đất, kết
quả điều tra thực địa v.v..., nghiên cứu đã tiến
hành hoàn thiện dữ liệu bản đồ và hệ thống cơ
sở dữ liệu.
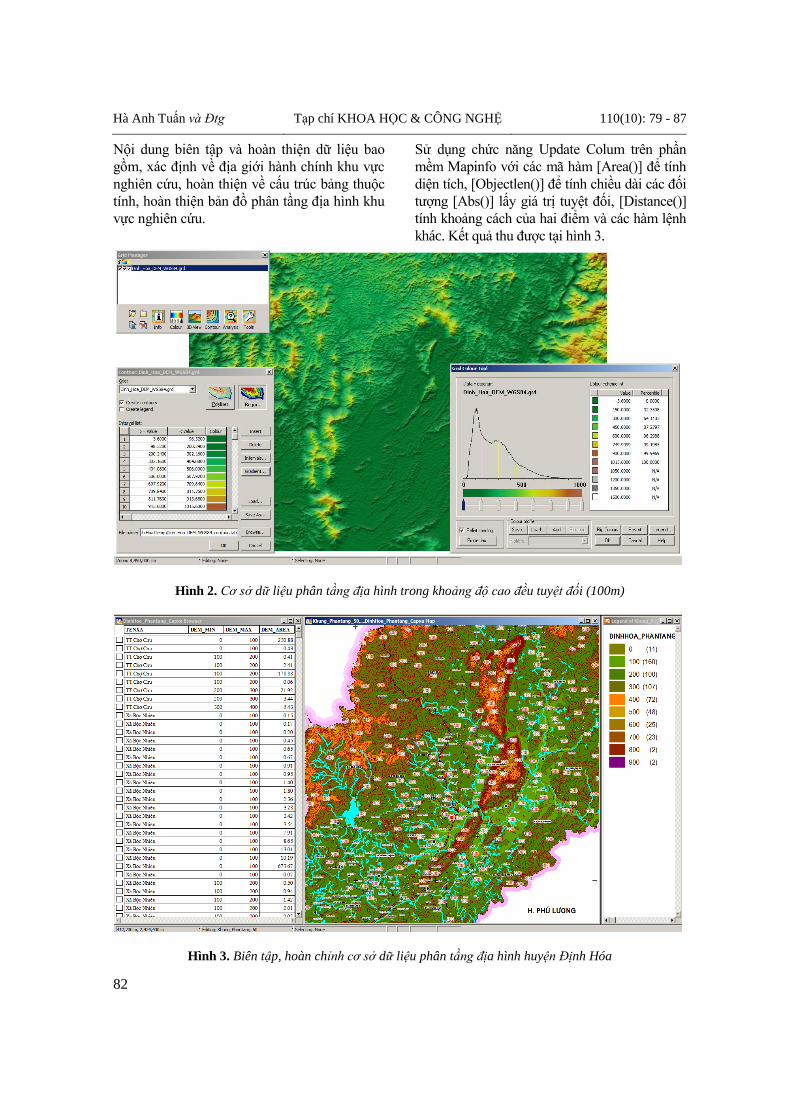
Hà Anh Tuấn và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 79 - 87
82
Nội dung biên tập và hoàn thiện dữ liệu bao
gồm, xác định về địa giới hành chính khu vực
nghiên cứu, hoàn thiện về cấu trúc bảng thuộc
tính, hoàn thiện bản đồ phân tầng địa hình khu
vực nghiên cứu.
Sử dụng chức năng Update Colum trên phần
mềm Mapinfo với các mã hàm [Area()] để tính
diện tích, [Objectlen()] để tính chiều dài các đối
tƣợng [Abs()] lấy giá trị tuyệt đối, [Distance()]
tính khoảng cách của hai điểm và các hàm lệnh
khác. Kết quả thu đƣợc tại hình 3.
Hình 2. Cơ sở dữ liệu phân tầng địa hình trong khoảng độ cao đều tuyệt đối (100m)
Hình 3. Biên tập, hoàn chỉnh cơ sở dữ liệu phân tầng địa hình huyện Định Hóa
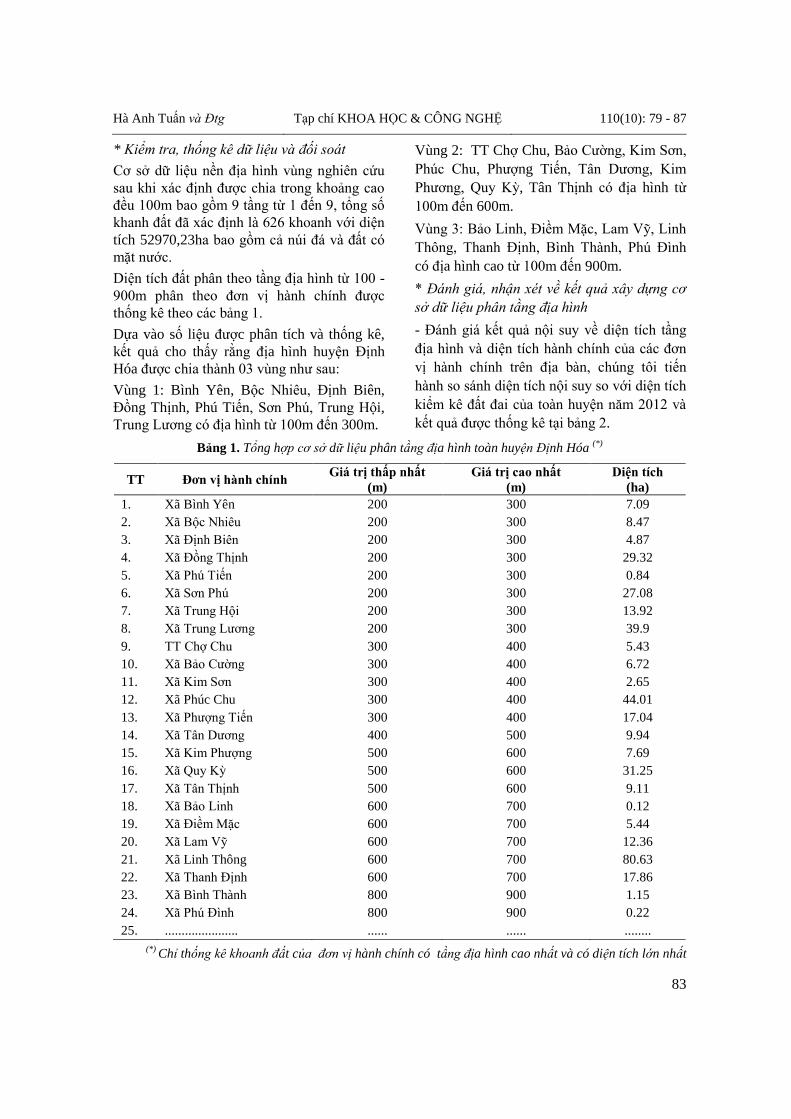
Hà Anh Tuấn và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 79 - 87
83
* Kiểm tra, thống kê dữ liệu và đối soát
Cơ sở dữ liệu nền địa hình vùng nghiên cứu
sau khi xác định đƣợc chia trong khoảng cao
đều 100m bao gồm 9 tầng từ 1 đến 9, tổng số
khanh đất đã xác định là 626 khoanh với diện
tích 52970,23ha bao gồm cả núi đá và đất có
mặt nƣớc.
Diện tích đất phân theo tầng địa hình từ 100 -
900m phân theo đơn vị hành chính đƣợc
thống kê theo các bảng 1.
Dựa vào số liệu đƣợc phân tích và thống kê,
kết quả cho thấy rằng địa hình huyện Định
Hóa đƣợc chia thành 03 vùng nhƣ sau:
Vùng 1: Bình Yên, Bộc Nhiêu, Định Biên,
Đồng Thịnh, Phú Tiến, Sơn Phú, Trung Hội,
Trung Lƣơng có địa hình từ 100m đến 300m.
Vùng 2: TT Chợ Chu, Bảo Cƣờng, Kim Sơn,
Phúc Chu, Phƣợng Tiến, Tân Dƣơng, Kim
Phƣơng, Quy Kỳ, Tân Thịnh có địa hình từ
100m đến 600m.
Vùng 3: Bảo Linh, Điềm Mặc, Lam Vỹ, Linh
Thông, Thanh Định, Bình Thành, Phú Đình
có địa hình cao từ 100m đến 900m.
* Đánh giá, nhận xét về kết quả xây dựng cơ
sở dữ liệu phân tầng địa hình
- Đánh giá kết quả nội suy về diện tích tầng
địa hình và diện tích hành chính của các đơn
vị hành chính trên địa bàn, chúng tôi tiến
hành so sánh diện tích nội suy so với diện tích
kiểm kê đất đai của toàn huyện năm 2012 và
kết quả đƣợc thống kê tại bảng 2.
Bảng 1. Tổng hợp cơ sở dữ liệu phân tầng địa hình toàn huyện Định Hóa (*)
TT Đơn vị hành chính Giá trị thấp nhất
(m)
Giá trị cao nhất
(m)
Diện tích
(ha)
1. Xã Bình Yên 200 300 7.09
2. Xã Bộc Nhiêu 200 300 8.47
3. Xã Định Biên 200 300 4.87
4. Xã Đồng Thịnh 200 300 29.32
5. Xã Phú Tiến 200 300 0.84
6. Xã Sơn Phú 200 300 27.08
7. Xã Trung Hội 200 300 13.92
8. Xã Trung Lƣơng 200 300 39.9
9. TT Chợ Chu 300 400 5.43
10. Xã Bảo Cƣờng 300 400 6.72
11. Xã Kim Sơn 300 400 2.65
12. Xã Phúc Chu 300 400 44.01
13. Xã Phƣợng Tiến 300 400 17.04
14. Xã Tân Dƣơng 400 500 9.94
15. Xã Kim Phƣợng 500 600 7.69
16. Xã Quy Kỳ 500 600 31.25
17. Xã Tân Thịnh 500 600 9.11
18. Xã Bảo Linh 600 700 0.12
19. Xã Điềm Mặc 600 700 5.44
20. Xã Lam Vỹ 600 700 12.36
21. Xã Linh Thông 600 700 80.63
22. Xã Thanh Định 600 700 17.86
23. Xã Bình Thành 800 900 1.15
24. Xã Phú Đình 800 900 0.22
25. ...................... ...... ...... ........
(*) Chỉ thống kê khoanh đất của đơn vị hành chính có tầng địa hình cao nhất và có diện tích lớn nhất
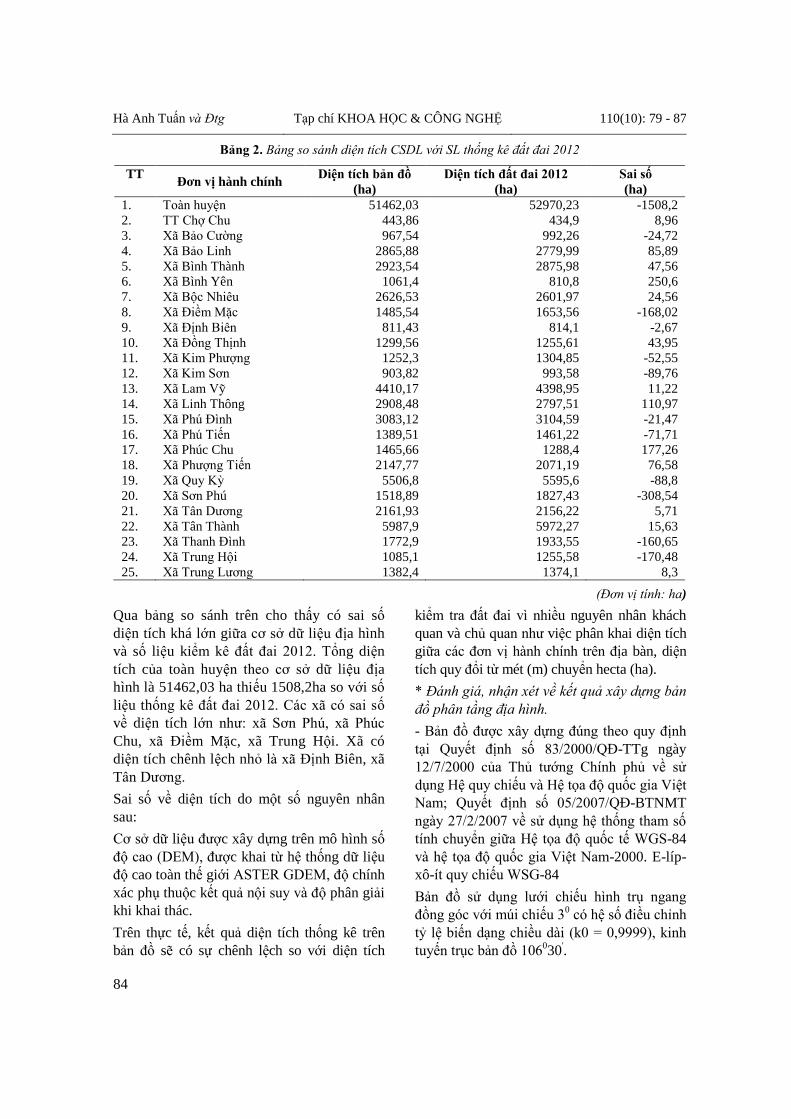
Hà Anh Tuấn và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 79 - 87
84
Bảng 2. Bảng so sánh diện tích CSDL với SL thống kê đất đai 2012
TT Đơn vị hành chính
Diện tích bản đồ
(ha)
Diện tích đất đai 2012
(ha)
Sai số
(ha)
1. Toàn huyện 51462,03 52970,23 -1508,2
2. TT Chợ Chu 443,86 434,9 8,96
3. Xã Bảo Cƣờng 967,54 992,26 -24,72
4. Xã Bảo Linh 2865,88 2779,99 85,89
5. Xã Bình Thành 2923,54 2875,98 47,56
6. Xã Bình Yên 1061,4 810,8 250,6
7. Xã Bộc Nhiêu 2626,53 2601,97 24,56
8. Xã Điềm Mặc 1485,54 1653,56 -168,02
9. Xã Định Biên 811,43 814,1 -2,67
10. Xã Đồng Thịnh 1299,56 1255,61 43,95
11. Xã Kim Phƣợng 1252,3 1304,85 -52,55
12. Xã Kim Sơn 903,82 993,58 -89,76
13. Xã Lam Vỹ 4410,17 4398,95 11,22
14. Xã Linh Thông 2908,48 2797,51 110,97
15. Xã Phú Đình 3083,12 3104,59 -21,47
16. Xã Phú Tiến 1389,51 1461,22 -71,71
17. Xã Phúc Chu 1465,66 1288,4 177,26
18. Xã Phƣợng Tiến 2147,77 2071,19 76,58
19. Xã Quy Kỳ 5506,8 5595,6 -88,8
20. Xã Sơn Phú 1518,89 1827,43 -308,54
21. Xã Tân Dƣơng 2161,93 2156,22 5,71
22. Xã Tân Thành 5987,9 5972,27 15,63
23. Xã Thanh Đình 1772,9 1933,55 -160,65
24. Xã Trung Hội 1085,1 1255,58 -170,48
25. Xã Trung Lƣơng 1382,4 1374,1 8,3
(Đơn vị tính: ha)
Qua bảng so sánh trên cho thấy có sai số
diện tích khá lớn giữa cơ sở dữ liệu địa hình
và số liệu kiểm kê đất đai 2012. Tổng diện
tích của toàn huyện theo cơ sở dữ liệu địa
hình là 51462,03 ha thiếu 1508,2ha so với số
liệu thống kê đất đai 2012. Các xã có sai số
về diện tích lớn nhƣ: xã Sơn Phú, xã Phúc
Chu, xã Điềm Mặc, xã Trung Hội. Xã có
diện tích chênh lệch nhỏ là xã Định Biên, xã
Tân Dƣơng.
Sai số về diện tích do một số nguyên nhân
sau:
Cơ sở dữ liệu đƣợc xây dựng trên mô hình số
độ cao (DEM), đƣợc khai từ hệ thống dữ liệu
độ cao toàn thế giới ASTER GDEM, độ chính
xác phụ thuộc kết quả nội suy và độ phân giải
khi khai thác.
Trên thực tế, kết quả diện tích thống kê trên
bản đồ sẽ có sự chênh lệch so với diện tích
kiểm tra đất đai vì nhiều nguyên nhân khách
quan và chủ quan nhƣ việc phân khai diện tích
giữa các đơn vị hành chính trên địa bàn, diện
tích quy đổi từ mét (m) chuyển hecta (ha).
* Đánh giá, nhận xét về kết quả xây dựng bản
đồ phân tầng địa hình.
- Bản đồ đƣợc xây dựng đúng theo quy định
tại Quyết định số 83/2000/QĐ-TTg ngày
12/7/2000 của Thủ tƣớng Chính phủ về sử
dụng Hệ quy chiếu và Hệ tọa độ quốc gia Việt
Nam; Quyết định số 05/2007/QĐ-BTNMT
ngày 27/2/2007 về sử dụng hệ thống tham số
tính chuyển giữa Hệ tọa độ quốc tế WGS-84
và hệ tọa độ quốc gia Việt Nam-2000. E-líp-
xô-ít quy chiếu WSG-84
Bản đồ sử dụng lƣới chiếu hình trụ ngang
đồng góc với múi chiếu 30 có hệ số điều chỉnh
tỷ lệ biến dạng chiều dài (k0 = 0,9999), kinh
tuyến trục bản đồ 106030
'.
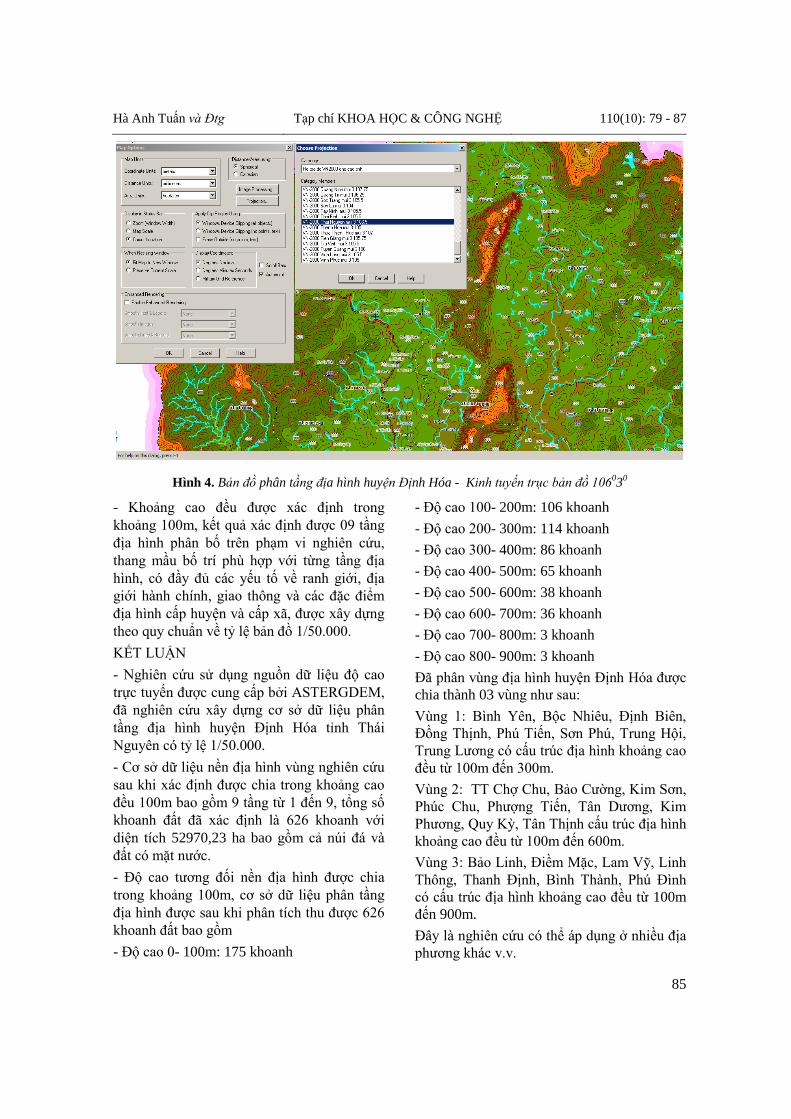
Hà Anh Tuấn và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 79 - 87
85
Hình 4. Bản đồ phân tầng địa hình huyện Định Hóa - Kinh tuyến trục bản đồ 10603
0
- Khoảng cao đều đƣợc xác định trong
khoảng 100m, kết quả xác định đƣợc 09 tầng
địa hình phân bố trên phạm vi nghiên cứu,
thang mầu bố trí phù hợp với từng tầng địa
hình, có đầy đủ các yếu tố về ranh giới, địa
giới hành chính, giao thông và các đặc điểm
địa hình cấp huyện và cấp xã, đƣợc xây dựng
theo quy chuẩn về tỷ lệ bản đồ 1/50.000.
KẾT LUẬN
- Nghiên cứu sử dụng nguồn dữ liệu độ cao
trực tuyến đƣợc cung cấp bởi ASTERGDEM,
đã nghiên cứu xây dựng cơ sở dữ liệu phân
tầng địa hình huyện Định Hóa tỉnh Thái
Nguyên có tỷ lệ 1/50.000.
- Cơ sở dữ liệu nền địa hình vùng nghiên cứu
sau khi xác định đƣợc chia trong khoảng cao
đều 100m bao gồm 9 tầng từ 1 đến 9, tổng số
khoanh đất đã xác định là 626 khoanh với
diện tích 52970,23 ha bao gồm cả núi đá và
đất có mặt nƣớc.
- Độ cao tƣơng đối nền địa hình đƣợc chia
trong khoảng 100m, cơ sở dữ liệu phân tầng
địa hình đƣợc sau khi phân tích thu đƣợc 626
khoanh đất bao gồm
- Độ cao 0- 100m: 175 khoanh
- Độ cao 100- 200m: 106 khoanh
- Độ cao 200- 300m: 114 khoanh
- Độ cao 300- 400m: 86 khoanh
- Độ cao 400- 500m: 65 khoanh
- Độ cao 500- 600m: 38 khoanh
- Độ cao 600- 700m: 36 khoanh
- Độ cao 700- 800m: 3 khoanh
- Độ cao 800- 900m: 3 khoanh
Đã phân vùng địa hình huyện Định Hóa đƣợc
chia thành 03 vùng nhƣ sau:
Vùng 1: Bình Yên, Bộc Nhiêu, Định Biên,
Đồng Thịnh, Phú Tiến, Sơn Phú, Trung Hội,
Trung Lƣơng có cấu trúc địa hình khoảng cao
đều từ 100m đến 300m.
Vùng 2: TT Chợ Chu, Bảo Cƣờng, Kim Sơn,
Phúc Chu, Phƣợng Tiến, Tân Dƣơng, Kim
Phƣơng, Quy Kỳ, Tân Thịnh cấu trúc địa hình
khoảng cao đều từ 100m đến 600m.
Vùng 3: Bảo Linh, Điềm Mặc, Lam Vỹ, Linh
Thông, Thanh Định, Bình Thành, Phú Đình
có cấu trúc địa hình khoảng cao đều từ 100m
đến 900m.
Đây là nghiên cứu có thể áp dụng ở nhiều địa
phƣơng khác v.v.
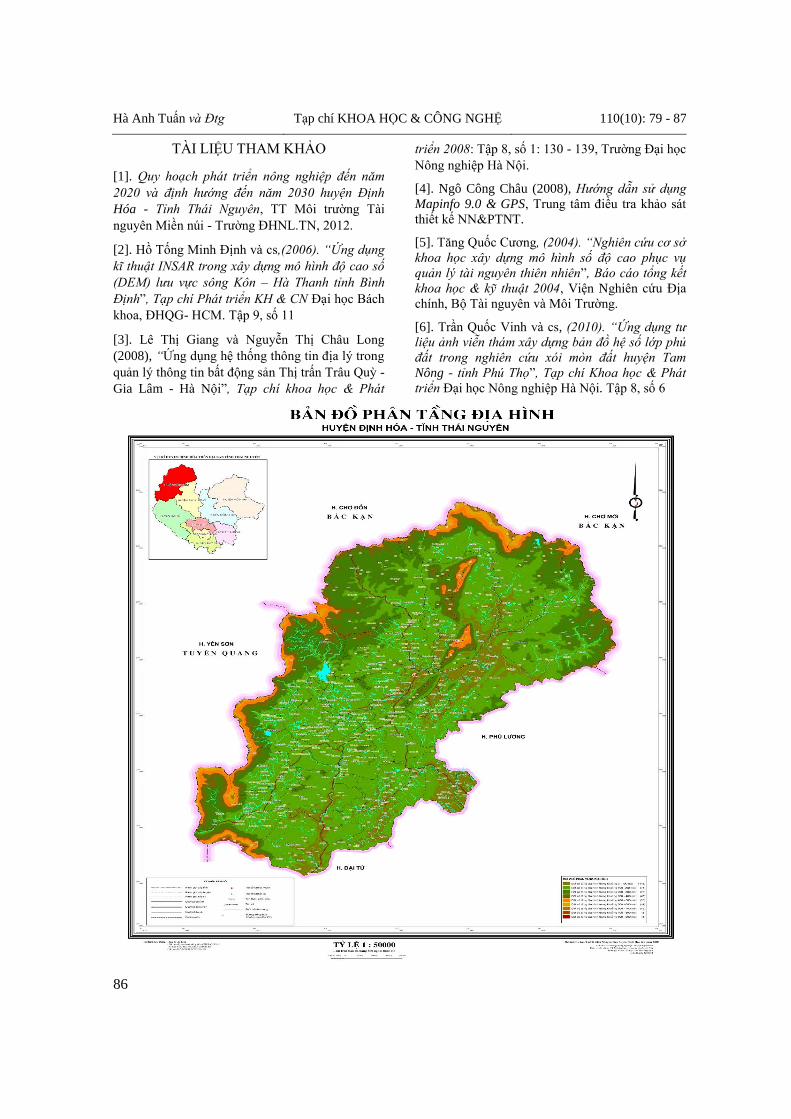
Hà Anh Tuấn và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 79 - 87
86
TÀI LIỆU THAM KHẢO
[1]. Quy hoạch phát triển nông nghiệp đến năm
2020 và định hướng đến năm 2030 huyện Định
Hóa - Tỉnh Thái Nguyên, TT Môi trƣờng Tài
nguyên Miền núi - Trƣờng ĐHNL.TN, 2012.
[2]. Hồ Tống Minh Định và cs,(2006). “Ứng dụng
kĩ thuật INSAR trong xây dựng mô hình độ cao số
(DEM) lưu vực sông Kôn – Hà Thanh tỉnh Bình
Định”, Tạp chí Phát triển KH & CN Đại học Bách
khoa, ĐHQG- HCM. Tập 9, số 11
[3]. Lê Thị Giang và Nguyễn Thị Châu Long
(2008), “Ứng dụng hệ thống thông tin địa lý trong
quản lý thông tin bất động sản Thị trấn Trâu Quỳ -
Gia Lâm - Hà Nội”, Tạp chí khoa học & Phát
triển 2008: Tập 8, số 1: 130 - 139, Trƣờng Đại học
Nông nghiệp Hà Nội.
[4]. Ngô Công Châu (2008), Hướng dẫn sử dụng
Mapinfo 9.0 & GPS, Trung tâm điều tra khảo sát
thiết kế NN&PTNT.
[5]. Tăng Quốc Cƣơng, (2004). “Nghiên cứu cơ sở
khoa học xây dựng mô hình số độ cao phục vụ
quản lý tài nguyên thiên nhiên”, Báo cáo tổng kết
khoa học & kỹ thuật 2004, Viện Nghiên cứu Địa
chính, Bộ Tài nguyên và Môi Trƣờng.
[6]. Trần Quốc Vinh và cs, (2010). “Ứng dụng tư
liệu ảnh viễn thám xây dựng bản đồ hệ số lớp phủ
đất trong nghiên cứu xói mòn đất huyện Tam
Nông - tỉnh Phú Thọ”, Tạp chí Khoa học & Phát
triển Đại học Nông nghiệp Hà Nội. Tập 8, số 6

Hà Anh Tuấn và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 79 - 87
87
SUMMARY
A STUDY OF BUILDING STRATIFIED TOPOGRAPHIC DATABASE, 1:50.000
SCALED TOPOGRAPHIC MAP IN DINH HOA – THAI NGUYEN PROVINCE
FROM THE ASTER GDEM GLOBAL HEIGHT DATABASE SYSTEM
Ha Anh Tuan
*, Truong Thanh Nam, Hoang Van Hung,
Vuong Van Huyen, Ma Thi Trang College of Agriculture and Forestry – TNU
The study used online height database sources provided by ASTER GDEM to build stratified
topographic database. The results of this study have built a mapping system and stratified
topographic database included stratified topographic, digital evaluation model (DEM) in Dinh Hoa
district Thai Nguyen province. The stratified topographic structure of the research area was
classified in 100m altitude with 9 topographic levels from 1 to 9. The number of analyzed plots are
626 with total area of 52970.23ha in which the largest plot is 175 with average height of 100m and
there are 03 smallest plots with average height ranged from 800 – 900m. The result of this study is
one of the single criteria for adaptive classification of land, planning for development of
agricultural production, arranging crops with adaptive ability of absolute height in Dinh Hoa
district Thai Nguyen province.
Keywords: ASTER GDEM, Stratified topographic database, Dinh Hoa, DEM, stratified
topography.
Ngày nhận bài: 18/8/2013; Ngày phản biện: 25/10/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: PGS.TS. Trần Viết Khanh – Đại học Thái Nguyên
* Tel: 0913455882; Email: [email protected]
Hà Anh Tuấn và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 79 - 87
88

Phạm Ngọc Phƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 89 - 93
89
XÂY DỰNG HỆ THỐNG GIÁM SÁT MÔI TRƢỜNG
TẠI CÁC TRUNG TÂM TÍCH HỢP DỮ LIỆU
Phạm Ngọc Phƣơng
1,* , Nguyễn Văn Tam
2
1 Trung tâm Công nghệ thông tin – ĐH Thái Nguyên 2 Viện Công nghệ thông tin – Viện Hàn lâm KH&CN Việt Nam
TÓM TẮT Trong bài báo này chúng tôi tập trung thiết kế và xây dựng hệ thống giám sát môi trƣờng vận hành
tại các Trung tâm tích hợp dữ liệu bằng công nghệ nhúng dựa trên vi điều khiển AVR và phần
mềm giám sát để thực hiện nhiệm vụ thu nhận các đầu vào cảm biến sau đó xử lý dữ liệu đo và
đƣa ra cảnh báo khi các tham số đo vƣợt ngƣỡng cho phép. Ngoài ra hệ thống vi điều khiển trung
tâm cũng có nhiệm vụ truyền thông với máy chủ quản lý, máy chủ quản lý sẽ giám sát các thông
số đo đƣợc từ vi điều khiển và đƣa ra cảnh báo đến ngƣời quản trị từ xa qua modem GSM.
Từ khóa: Trung tâm tích hợp dữ liệu, giám sát môi trường, vi điều khiển AVR.
ĐẶT VẤN ĐỀ*
Khi nhắc đến nền tảng của hệ thống thông tin
không thể không nhắc đến các Trung tâm tích
hợp dữ liệu (Data center - viết tắt là DC), trái
tim của toàn bộ hệ thống. Trong thực tế khi
thiết kế chuẩn hạ tầng kỹ thuật thì DC gồm 2
thành phần chính:
- Hạ tầng mạng: máy chủ, hệ thống lƣu trữ,
thiết bị mạng…
- Hạ tầng vật lý quan trọng: (hệ thống làm
mát HVAC, hệ thống phòng cháy chữa cháy,
hệ thống điện dự phòng UPS, v.v.)
Do vậy trong một môi trƣờng vận hành tại các
DC luôn tồn tại các hệ thống riêng biệt điều
khiển các tham số khác nhau (điện áp, nhiệt
độ, độ ẩm, an ninh, v.v.) với chung mục đích
duy trì DC hoạt động an toàn, hiệu quả và ổn
định. Trong tiêu chuẩn TIA-942(Tiêu chuẩn
viễn thông trong các Data center) xây dựng bởi
TIA(Telecommunications Industry Association
- Hiệp hội công nghiệp viễn thông Hoa Kỳ)
yêu cầu bắt buộc về thiết kế môi trƣờng tiêu
chuẩn trong các DC. Nhƣng thực tế hiện nay
các hệ thống này thƣờng hoạt động độc lập
không thể giám sát và xử lý sự cố tập trung
dẫn đến tình trạng dữ liệu nhiều khó giám sát,
tổng hợp và so sánh. Tác giả tập trung nghiên
cứu và xây dựng một hệ thống giám sát môi
trƣờng trong các DC và thực hiện giám sát thử
* Tel: 0986784940; Email: [email protected]
nghiệm một số thông số chọn lọc quan trọng
nhƣ nhiệt độ, báo cháy, độ ẩm, điện lƣới (gọi
tắt là các thông số chọn lọc).
XÂY DỰNG HỆ THỐNG GIÁM SÁT MÔI
TRƢỜNG TẠI CÁC TRUNG TÂM TÍCH
HỢP DỮ LIỆU
Mô hình tổng thể của hệ thống giám sát
Hệ thống giám sát gồm các khối sau đây:
- Khối xử lý trung tâm: là một vi điều khiển
AVR 8 bit dùng để xử lý toàn bộ thông tin
vào/ ra và các thông tin khác theo thuật
toán.
- Khối hiển thị : Màn LCD 16x 2 dùng để
hiển thị theo thời gian thực các tham số
quan trọng khi hệ thống hoạt động(nhiệt độ,
độ ẩm).
- Khối đo nhiệt độ: Thu nhận dữ liệu đo từ
các các cảm biến nhiệt và đƣa về khối xử lý
trung tâm.
- Khối đo độ ẩm: Thu nhận dữ liệu đo từ các
các cảm biến độ ẩm và đƣa về khối điều khiển
trung tâm.
- Khối kiểm tra tình trạng báo cháy: Có
nhiệm vụ thu nhận dữ liệu đo từ các các đầu
dò báo cháy (đầu dò khói - nhiệt) hoặc các
trạng thái cảnh báo của tủ báo cháy.
- Khối kiểm tra trạng thái nguồn điện: Có
nhiệm vụ thu nhận dữ liệu logic của trạng thái
điện lƣới, trạng thái UPS.

Phạm Ngọc Phƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 89 - 93
90
- Khối cảnh báo: Đƣa ra cảnh báo nếu các giá trị giám sát vƣợt ngƣỡng cảnh báo, khối xử lý trung tâm sẽ đƣa tới các đầu ra cảnh báo thông qua các rơle trung gian (chuông báo, đèn báo, còi hú).
- Khối giao tiếp máy tính: Truyền các tham số giám sát giữa máy tính và khối xử lý trung tâm sử dụng giao thức RS232.
- Khối cấp nguồn: Cung cấp toàn bộ nguồn cho mạch điều khiển và các cảm biến, khối nguồn đƣợc thiết kế nguồn dự phòng để đảm bảo hệ thống giám sát vẫn hoạt động cả khi nguồn điện cung cấp cho TTTHDL bị mất.
- Máy chủ: Cài đặt phần mềm giám sát giúp ngƣời quản trị giám sát, tổng hợp toàn bộ các tham số của môi trƣờng vận hành trong DC dƣới dạng đồ họa trực quan. Trong trƣờng hợp các tham số giám sát vƣợt ngƣỡng thì máy chủ sẽ gửi các cảnh báo tới ngƣời quản trị từ xa thông qua modem GSM(bằng tin nhắn và cuộc gọi khẩn cấp).
Thuật toán của hệ thống thực hiện xử lý nhƣ sau:
- Khối xử lý trung tâm lần lƣợt thu nhận các
tín hiệu từ các cảm biến (cảm biến nhiệt, cảm
biến độ ẩm, cảm biến báo cháy, trạng thái
nguồn điện .v.v).
- Đo đạc và đƣa ra kết quả ra màn hình hiển
thị để tiện theo dõi và kiểm tra.
- So sánh các thông số đo đƣợc từ các cảm
biến với các ngƣỡng đặt sẵn theo tiêu chuẩn
của TTTHDL .
- Đƣa ra cảnh báo tới Rơle nếu các thông số
cảnh báo vƣợt ngƣỡng cho phép (quá nhiệt
độ, độ ẩm quá cao, có báo cháy, mất điện lƣới
hoặc UPS lỗi).
- Truyền các thông số đo đạc, cảnh báo đƣợc
từ cảm biến cho máy chủ.
- Máy chủ truyền các cảnh báo từ xa thông
qua Modem GSM.
Hình 1. Mô hình hệ thống giám sát môi trường trong các Data center
Hình 2. Sơ đồ khối tổng thể của hệ thống giám sát môi trường Data center
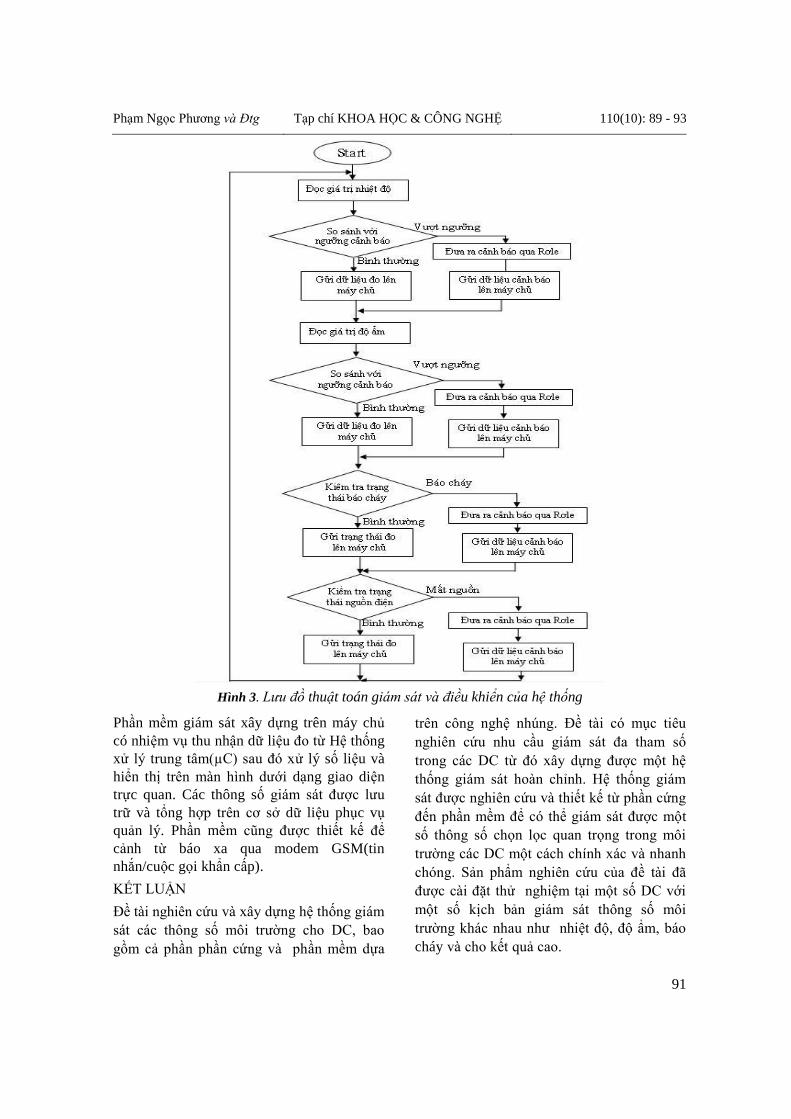
Phạm Ngọc Phƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 89 - 93
91
Hình 3. Lưu đồ thuật toán giám sát và điều khiển của hệ thống
Phần mềm giám sát xây dựng trên máy chủ
có nhiệm vụ thu nhận dữ liệu đo từ Hệ thống
xử lý trung tâm(µC) sau đó xử lý số liệu và
hiển thị trên màn hình dƣới dạng giao diện
trực quan. Các thông số giám sát đƣợc lƣu
trữ và tổng hợp trên cơ sở dữ liệu phục vụ
quản lý. Phần mềm cũng đƣợc thiết kế để
cảnh từ báo xa qua modem GSM(tin
nhắn/cuộc gọi khẩn cấp).
KẾT LUẬN
Đề tài nghiên cứu và xây dựng hệ thống giám
sát các thông số môi trƣờng cho DC, bao
gồm cả phần phần cứng và phần mềm dựa
trên công nghệ nhúng. Đề tài có mục tiêu
nghiên cứu nhu cầu giám sát đa tham số
trong các DC từ đó xây dựng đƣợc một hệ
thống giám sát hoàn chỉnh. Hệ thống giám
sát đƣợc nghiên cứu và thiết kế từ phần cứng
đến phần mềm để có thể giám sát đƣợc một
số thông số chọn lọc quan trọng trong môi
trƣờng các DC một cách chính xác và nhanh
chóng. Sản phẩm nghiên cứu của đề tài đã
đƣợc cài đặt thử nghiệm tại một số DC với
một số kịch bản giám sát thông số môi
trƣờng khác nhau nhƣ nhiệt độ, độ ẩm, báo
cháy và cho kết quả cao.
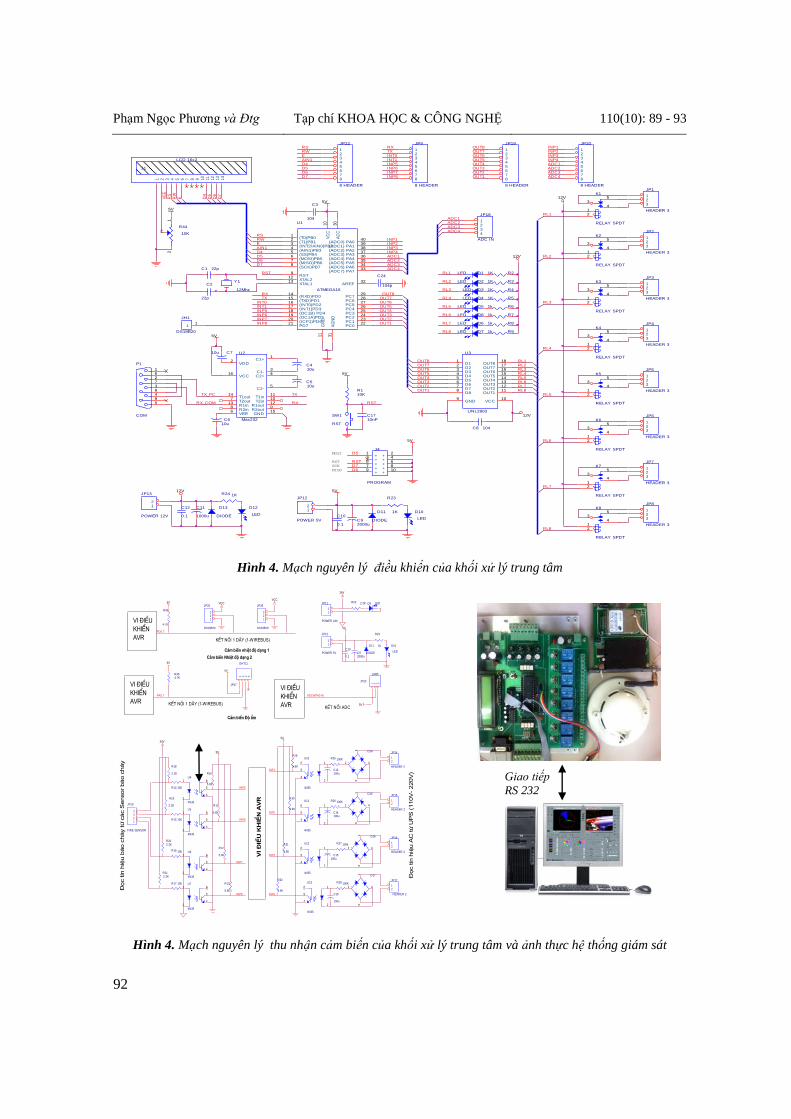
Phạm Ngọc Phƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 89 - 93
92
5V
5V
5V
12V
12V
12V
5V
12V
5V
5V
RST
TX_PC
RX_COM
TX
RX
RXTX
VE
E
OUT1OUT2OUT3OUT4OUT5OUT6OUT7
OUT8
OUT8OUT7OUT6OUT5OUT4OUT3OUT2OUT1
RL1
RL1
RL3RL4RL5RL6RL7RL8
RL3
RL4
RL5
RL6
RL7
RL8
RL1
RL3
RL4
RL5
RL6
RL7
RL8
RL2
RL2
RL2
INP1INP2INP3INP4ADC1ADC2ADC3ADC4
INP7INP6INP5INT1INT0
ADC1ADC2ADC3ADC4
RST
RXTXINT0INT1INP5INP6INP7INP8
OUT8OUT7OUT6OUT5OUT4OUT3OUT2OUT1
INP1INP2INP3INP4ADC1ADC2ADC3ADC4
D5
RSTD7D6
AIN1
RW
D6
D5
RS
E
D4
D7
D7
RS
D6
RW
D5D4
E
RSRWEAIN1D4D5D6D7
INP8
C2
22p
U1
ATMEGA16
9
181920
29
3031
4012345678
21 22232425262728
1011
1213
14151617
39383736353433
32
RST
(OC1B) PD4(OC1A)PD5(ICP1)PD6
PC7
AC
CA
GN
D
(ADC0) PA0(T0)PB0(T1)PB1(INT2/AIN0)PB2(AIN1)PB3(SS)PB4(MOSI)PB5(MISO)PB6(SCK)PB7
PD7 PC0PC1PC2PC3PC4PC5PC6
VC
CG
ND
XTAL2XTAL1
(RXD)PD0(TXD)PD1(INT0)PD2(INT1)PD3
(ADC1) PA1(ADC2) PA2(ADC3) PA3(ADC4) PA4(ADC5) PA5(ADC6) PA6(ADC7) PA7
AREF
C1 22p
Y1
12Mhz
U3
UNL2803
12
76
345
8
17
10
1112
18
13
1615
9
14
D1D2
D7D6
D3D4D5
D8
OUT7
VCC
OUT1OUT2
OUT8
OUT3
OUT6OUT5
GND
OUT4
C3
104
JP12
POWER 5V
12
R23
1K D10
LED
D11
DIODE
R21K
R31K
R41K
R51K
R61k
R81k
R71k
SW1
RST
R110K
R91k
C92000u
C10
0.1
C1710nP
U2
Max232
3
6
10
21
5
4
14
138
711
12915
16 C1-
VEE
T2in
VDDC1+
C2-
C2+
T1out
R1inR2in
T2outT1in
R1outR2outGND
VCC
C24
104p
P1
COM
594837261
JH1
DS18B20
11
J4
PROGRAM
13579
246810
+++++
+++++
C8 104
C410u
C510u
D1LED
D3LED
D4LED
D5LED
D6LED
D2LED
D7LED
D8LED
JP13
POWER 12V
12
C12
0.1
C11
1000u
D12
LED
R24 1K
D13
DIODE
JP22
8 HEADER
12345678
C610u
C710u
J1
LCD 16x21 2 3 4 5 6 7 8 9 10 11 12 13 14
JP1
HEADER 3
123
JP2
HEADER 3
123
JP3
HEADER 3
123
JP4
HEADER 3
123
JP5
HEADER 3
123
JP9
8 HEADER
12345678
JP19
8 HEADER
12345678
JP20
8 HEADER
12345678
K1
RELAY SPDT
35
412
K2
RELAY SPDT
35
412
K3
RELAY SPDT
35
412
JP6
HEADER 3
123
JP7
HEADER 3
123
JP8
HEADER 3
123
K4
RELAY SPDT
35
412
K5
RELAY SPDT
35
412
K6
RELAY SPDT
35
412
K7
RELAY SPDT
35
412
K8
RELAY SPDT
35
412
R44
10K
13
2
JP18
ADC IN
1234
MOSI
MISO
SCK
RST
Hình 4. Mạch nguyên lý điều khiển của khối xử lý trung tâm
5V
5V
24V
24V
5V
5V
5V
5V
VCCVCC5V
INP1
INP2
INP3
INP4
INP5
INP7
INP6
INP8
PA0.7 ADC4(PA0.4)
PD0.7
R22 2.2K D9 LED
R10
5.6K
R11
5.6K
R12
5.6K
R13
5.6K
JP12
POWER 5V
12
R23
1KC10
0.1
D11
DIODEC92000u
D10
LED
R14 10K
R15 10K
R17 10K
R16 10K
R19
2.2K
R202.2K
R18
2.2K
R212.2K
JP23
LM35
1 2 3
JP14
HEADER 2
12-+
D141
2
3
4
-+
D151
2
3
4
-+
D161
2
3
4
-+
D171
2
3
4
R25 100K
C13100u
U10
4N35
16
2
5
4
JP15
HEADER 2
12
JP16
HEADER 2
12
JP17
HEADER 2
12
R26 100K
C14100u
U11
4N35
16
2
5
4
U12
4N35
16
2
5
4
R27 100k
R28 100KU13
4N35
16
2
5
4
C15100u
C16
100u
U5
4N35
1 6
2
5
4
U6
4N35
1 6
2
5
4
U4
4N35
1 6
2
5
4
U7
4N35
1 6
2
5
4
R29
5.6K
R30
5.6K
R31
5.6K
R32
5.6K
JP10
FIRE SENSOR
1234
JP27
DHT11
1 2 3 4
JP11
POWER 24V
12
JP25
DS18B20
123
JP26
DS18B20
123
R454.7K
R43
4.7K
VI §IÒU
KHIÓN
AVR
C¶m biÕn NhiÖt ®é d¹ng 2
VI §IÒU
KHIÓN
AVR
C¶m biÕn §é Èm
KÕt nèi ADCKÕt nèi 1 d©y (1-Wirebus)
§äc tÝn
hiÖ
u A
C tõ U
PS
(110V
- 220V
)
§äc tÝn
hiÖ
u b
¸o c
h¸y tõ c
¸c S
ensor
b¸o c
h¸y
VI §
IÒU
KH
IÓN
AV
R
C¶m biÕn nhiÖt ®é d¹ng 1
VI §IÒU
KHIÓN
AVR KÕt nèi 1 d©y (1-Wirebus)
Hình 4. Mạch nguyên lý thu nhận cảm biến của khối xử lý trung tâm và ảnh thực hệ thống giám sát
Giao tiếp
RS 232

Phạm Ngọc Phƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 89 - 93
93
Hình 5. Giao diện phần mềm giám sát và kết quả giám sát trên máychủ
TÀI LIỆU THAM KHẢO
[1]. Nguyễn Hữu Công (2007), “Kỹ thuật đo
lường”, Nxb Đại học Quốc Gia Hà Nội.
[2]. Nguyễn Hữu Công, “Đo lường và điều khiển
xa”, Tập bài giảng cho cao học các chuyên
nghành CNTT và Đo lƣờng điều khiển.
[3]. Nguyễn Văn Hoà (2005), " Giáo trình Đo
lường điện và cảm biến đo lường ", Nxb Giáo dục,
Hà Nội.
[4]. Nguyễn Văn Tam (1997), “Điều khiển và
Ghép nối thiết bị ngoại vi”, Nxb Thống kê Hà Nội.
[5]. Atmel Corporation(2010).
“8-bit Microcontroller with 16K Bytes In-System
Programmable Flash- ATmega16/ATmega16L”.
http://www.atmel.com/devices/ATMEGA16
[6]. Telecommunications Industry
Association(2005), “TIA-942 Telecommunications
Infrastructure Standard for Data Centers”, pp. 28-
30, 117-129.
SUMMARY
DESIGNING AN ENVIRONMENT - MONITORING SYSTEM AT DATA CENTERS
Pham Ngoc Phuong
1,*, Nguyen Van Tam
2
1 Information Technology Center – TNU 2 Institute of Information Technology - Vietnamese Academy of Science and Technology
In this paper, we focus on the design and building of an environment-mornitoring system operating
in data centers, which is equipped with embedded technology based on AVR microcontroller and
management software, in order to take over the reception of sensing entries and then process the
received data and give warnings when the parameters exceed the allowed limit. Besides, the
central microcontrol is also in communication with the management server that will supervise the
measured parameters from this microcontroller and give warnings to the remote manager via
GSM modem.
Keywords: Data center, environment monitoring system, AVR microcontroller.
Ngày nhận bài: 29/8/2013; Ngày phản biện:17/9/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: PGS.TS. Nguyễn Hữu Công – Đại học Thái Nguyên
* Tel: 0986784940; Email: [email protected]

Phạm Ngọc Phƣơng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 89 - 93
94
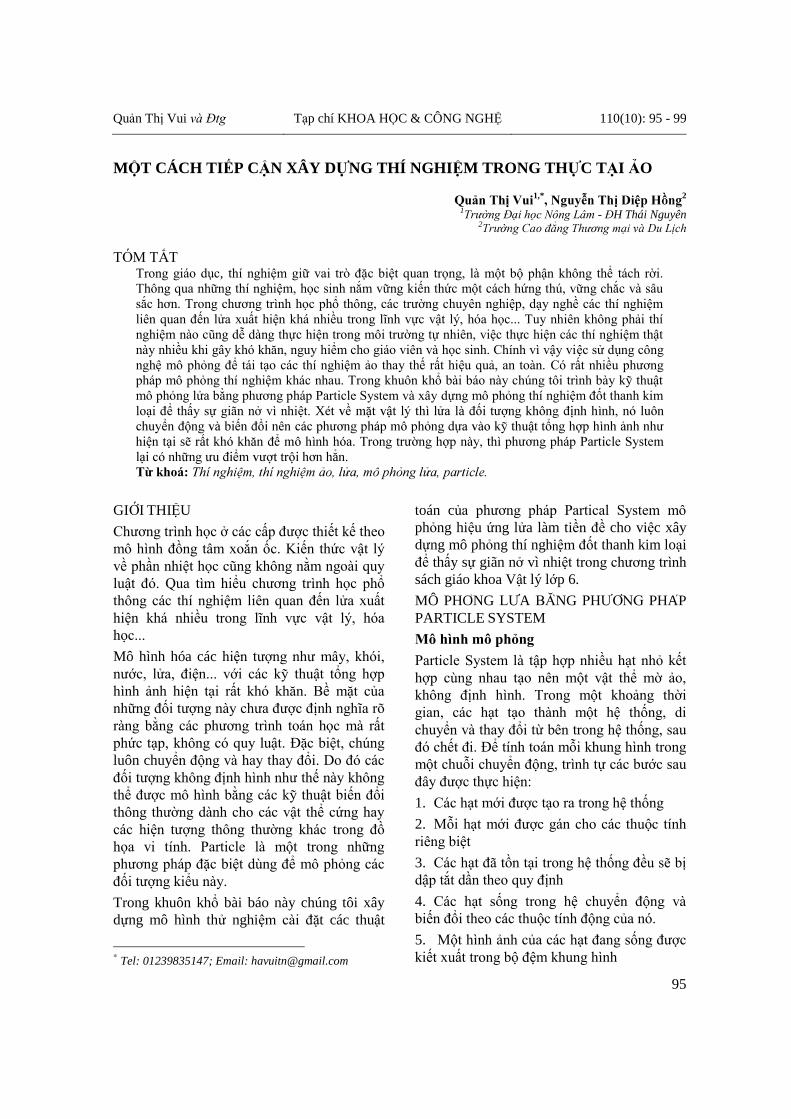
Quản Thị Vui và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 95 - 99
95
MỘT CÁCH TIẾP CẬN XÂY DỰNG THÍ NGHIỆM TRONG THỰC TẠI ẢO
Quản Thị Vui1,* 2
1Trường Đại học Nông Lâm - ĐH Thái Nguyên 2
TÓM TẮT Trong giáo dục, thí nghiệm giữ vai trò đặc biệt quan trọng, là một bộ phận không thể tách rời.
Thông qua những thí nghiệm, học sinh nắm vững kiến thức một cách hứng thú, vững chắc và sâu
sắc hơn. Trong chƣơng trình học phổ thông, các trƣờng chuyên nghiệp, dạy nghề các thí nghiệm
liên quan đến lửa xuất hiện khá nhiều trong lĩnh vực vật lý, hóa học... Tuy nhiên không phải thí
nghiệm nào cũng dễ dàng thực hiện trong môi trƣờng tự nhiên, việc thực hiện các thí nghiệm thật
này nhiều khi gây khó khăn, nguy hiểm cho giáo viên và học sinh. Chính vì vậy việc sử dụng công
nghệ mô phỏng để tái tạo các thí nghiệm ảo thay thế rất hiệu quả, an toàn. Có rất nhiều phƣơng
pháp mô phỏng thí nghiệm khác nhau. Trong khuôn khổ bài báo này chúng tôi trình bày kỹ thuật
mô phỏng lửa bằng phƣơng pháp Particle System và xây dựng mô phỏng thí nghiệm đốt thanh kim
loại để thấy sự giãn nở vì nhiệt.
Từ khoá:
GIỚI THIỆU*
Chƣơng trình học ở các cấp đƣợc thiết kế theo
mô hình đồng tâm xoắn ốc. Kiến thức vật lý
về phần nhiệt học cũng không nằm ngoài quy
luật đó. Qua tìm hiểu chƣơng trình học phổ
thông các thí nghiệm liên quan đến lửa xuất
hiện khá nhiều trong lĩnh vực vật lý, hóa
học...
Mô hình hóa các hiện tƣợng nhƣ mây, khói,
nƣớc, lửa, điện... với các kỹ thuật tổng hợp
hình ảnh hiện tại rất khó khăn. Bề mặt của
những đối tƣợng này chƣa đƣợc định nghĩa rõ
ràng bằng các phƣơng trình toán học mà rất
phức tạp, không có quy luật. Đặc biệt, chúng
luôn chuyển động và hay thay đổi. Do đó các
đối tƣợng không định hình nhƣ thế này không
thể đƣợc mô hình bằng các kỹ thuật biến đổi
thông thƣờng dành cho các vật thể cứng hay
các hiện tƣợng thông thƣờng khác trong đồ
họa vi tính. Particle là một trong những
phƣơng pháp đặc biệt dùng để mô phỏng các
đối tƣợng kiểu này.
Trong khuôn khổ bài báo này chúng tôi xây
dựng mô hình thử nghiệm cài đặt các thuật
* Tel: 01239835147; Email: [email protected]
toán của phƣơng pháp Partical System mô
phỏng hiệu ứng lửa làm tiền đề cho việc xây
dựng mô phỏng thí nghiệm đốt thanh kim loại
để thấy sự giãn nở vì nhiệt trong chƣơng trình
sách giáo khoa Vật lý lớp 6.
MÔ PHONG LƢA BĂNG PHƢƠNG PHAP
PARTICLE SYSTEM
Mô hình mô phỏng
Particle System là tập hợp nhiều hạt nhỏ kết
hợp cùng nhau tạo nên một vật thể mờ ảo,
không định hình. Trong một khoảng thời
gian, các hạt tạo thành một hệ thống, di
chuyển và thay đổi từ bên trong hệ thống, sau
đó chết đi. Để tính toán mỗi khung hình trong
một chuỗi chuyển động, trình tự các bƣớc sau
đây đƣợc thực hiện:
1. Các hạt mới đƣợc tạo ra trong hệ thống
2. Mỗi hạt mới đƣợc gán cho các thuộc tính
riêng biệt
3. Các hạt đã tồn tại trong hệ thống đều sẽ bị
dập tắt dần theo quy định
4. Các hạt sống trong hệ chuyển động và
biến đổi theo các thuộc tính động của nó.
5. Một hình ảnh của các hạt đang sống đƣợc
kiết xuất trong bộ đệm khung hình
Quản Thị Vui và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 94 - 99
96
Các hạt đƣợc sinh ra trong Particle System
đƣợc kiểm soát bởi các tiến trình ngẫu nhiên.
Một tiến trình xác định số hạt đƣợc sinh ra và
tham gia vào hệ thống trong một khoảng thời
gian. Con số này sẽ ảnh hƣởng đến mật độ
của đối tƣợng đang đƣợc xây dựng.
Có hai cách điều khiển số lƣợng hạt mới đƣợc
sinh ra:
1. Xác định số lƣợng hạt trung bình đƣợc
sinh ra trong một khung hình và khoảng biến
đổi của nó. Khi đó, số lƣợng hạt thực sự trong
một khung hình f là:
Npartsf = MeanPartsf + Rand() xVariancePartsf
Trong đó:
Rand(): là một hàm trả về một giá trị ngẫu
nhiên nằm trong đoạn [-1,1].
MeanPartsf: là số lƣợng trung bình các hạt.
VariancePartsf: là khoảng biến đổi của hạt.
2. Số lƣợng hạt phụ thuộc vào kích thƣớc mà
đối tƣợng thể hiện trên màn hình. Trong
phƣơng pháp này, ta cần xác định các tham số
của điểm quan sát so với một khung hình cụ
thể của đối tƣợng, tính toán vùng màn hình
mà nó bao phủ và đƣa ra số lƣợng hạt mới
phù hợp. Không cần thiết tạo ra hàng ngàn hạt
để bao phủ chỉ một vài điểm ảnh.
Phƣơng trình cụ thể nhƣ sau:
Npartsf=(MeanPartsSAf+Rand()xVariancePar
tsSAf ) x ScreenArea
Hình 2. Particle System phát ra các hạt dựa trên
vùng diện tích và các thuộc tính như vị trí, góc
phóng, và vận tốc khác nhau một cách ngẫu nhiên.
MeanPartsSAf: số lƣợng hạt trung bình trên
mỗi đơn vị diện tích màn hình.
VariancePartsSAf: khoảng biến đổi của hạt.
ScreenArea: diện tích phần màn hình mà
Particle System bao phủ.
Để điều khiển cƣờng độ của Particle System,
ngƣời thiết kế phải điều khiển số lƣợng hạt
trung bình đƣợc sinh ra cho mỗi khung hình.
Tiến trình này có thể sử dụng một hàm tuyến
tính đơn giản nhƣ sau:
MeanPartsf=InitialMean+DeltaMean x (f– f0)
Hay:
MeanPartsSAf=InitialMeanSA+DeltaMeanSA x (f–f0)
Trong đó:
f : là khung hình hiện tại.
f0 : là khung hình đầu tiên.
InitialMean, InitialMeanSA: số lƣợng hạt
trung bình tại khung hình đầu tiên.
DeltaMean, DeltaMean SA: tốc độ biến đổi và
với phƣơng trình biến đổi tuyến tính thì nó là
hằng số. Ở đây, chúng ta xây dựng mô hình
mô phỏng đơn giản nhất của Particle System.
Để điều khiển việc sinh ra các hạt của Particle
System, ta cần phải xác định rõ f0 và các tham
số trong 2 phƣơng trình trên.
Chuyển động của hạt lửa [6]
Một số phƣơng pháp đã đƣợc nghiên cứu để
mô hình chuyển động của các hạt để mô
phỏng ngọn lửa thực sự. Nhìn chung, tại một
thời điểm nhất định (t), vị trí mới của một hạt
đƣợc quản lý bởi vận tốc của nó v(t), gia tốc
a(t), và vòng lặp trong khoảng thời gian (Δt ).
Vector định hƣớng ban đầu của một hạt đƣợc
Quản Thị Vui và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 95 - 99
97
xác định bởi góc phát của bộ phát, gây ra các
hạt đƣợc phát ra ở các hƣớng khác nhau. Sau
khi chỉ đạo của một hạt có nguồn gốc, vận tốc
của nó đƣợc sử dụng để xác định nhanh các
hạt sẽ đi theo hƣớng đó. Để tính toán vị trí
tiếp theo của hạt p(t + Δt ), hệ thống theo
phƣơng trình đƣợc sử dụng:
p(t + Δt ) = p (t) + ( v (t) * Δt )
v(t + Δt ) = v (t) + a (t)
a(t + Δt ) = ( v (t) - v (t - Δt ) ) / Δt
Hệ thống này sử dụng các phƣơng trình của
hạt hiện tại vận tốc v(t) và thời gian khác
nhau Δt để xác định khoảng cách bao phủ bởi
các hạt. Khoảng cách này sẽ đƣợc thêm vào
vị trí hiện tại của hạt p(t), để lấy đƣợc vị trí
tiếp theo p(t + Δt ). Sự thay đổi trong vận tốc
của một hạt có nguồn gốc bằng cách thêm giá
trị gia tốc hiện tại a(t) với vận tốc hiện tại
v(t). Gia tốc của một hạt a(t), đƣợc tính bằng
cách chia sự thay đổi trong tốc độ hiện tại và
trƣớc đây của hạt bởi khoảng thời gian Δt .
Nghiên cứu ban đầu sử dụng hệ thống trên để
mô tả lửa. Điều này là do các hạt di chuyển
nhanh chóng trong bất kỳ hƣớng ngẫu nhiên.
Ngọn lửa được mô phỏng mà không có sự
kìm chế của các tác động thực tế
Để kiểm soát tốc độ và giảm các hành vi hỗn
loạn của các hạt, hai loại tham số đƣợc sử
dụng: lực hấp dẫn và lực cản. Trọng lực là
một lực thống nhất có ảnh hƣởng đến sự
chuyển động của một hạt theo hƣớng thẳng
đứng (tức trục Y) bằng cách cung cấp một lực
kéo xuống trên mỗi hạt. Các yếu tố kéo, đã
đƣợc sử dụng để kiểm soát sự chuyển động
của các hạt dọc theo trục ngang (tức là X và
Z). Phƣơng pháp này không tạo ra hiệu ứng
phù hợp với lửa cháy bởi vì dòng chảy hạt
quá đối xứng và dự đoán đƣợc.
Hình 4. Hình ảnh mô phỏng lửa bằng các hàm
lượng giác
Một cách tiếp cận tinh tế hơn đƣợc bắt nguồn
từ nghiên cứu một video của ngọn lửa. Dựa
trên những quan sát này xác định đƣợc "lƣỡi"
của ngọn lửa trong vành ngoài của ngọn lửa
liên tục thay đổi hƣớng của nó. Hiện tƣợng
này xảy ra bởi vì nhƣ khí trong một đám cháy
trở nên nóng hơn chúng trở nên nhẹ hơn
không khí xung quanh. Nhƣ vậy, khí di
chuyển hƣớng lên tới một khu vực nơi mà áp
lực thấp. Để mô phỏng hiệu ứng áp suất thấp
này, một tập hợp các điểm ngẫu nhiên đƣợc
chọn từ mỗi trục để hình thành một loạt các
tọa độ trong không gian ba chiều. Mỗi lần lặp,
những điểm áp lực đã đƣợc thay đổi một cách
ngẫu nhiên để tạo thành bộ mới của tọa độ.
Khi một hạt đƣợc phát ra vào hệ thống, nó
đƣợc chuyển từng bƣớc theo hƣớng áp lực
điểm thấp gần nhất. Do đó, các hạt tăng hình
thành đỉnh nhọn nhƣ quan sát thấy trong ngọn
lửa thực sự. Ban đầu, các điểm áp lực thấp là
tọa độ cố định. Tuy nhiên, kết quả là không
thực tế. Để khắc phục vấn đề này, các điểm
áp suất thấp đƣợc phép di chuyển ngẫu nhiên
trong một ranh giới quy định. Cách tiếp cận
này đƣợc minh họa trong hình 6. Mô hình
ngọn lửa đƣợc tạo ra bởi phƣơng pháp này
đƣợc thể hiện trong hình 5
Hình 5. Mô phỏng các hạt di chuyển sau mỗi lần
lặp đến các điểm áp suất thấp gần nhất
Quản Thị Vui và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 94 - 99
98
Hình 6. Mô phỏng ngọn lửa theo phương pháp
các hạt di chuyển về vùng áp thấp
MÔ HÌNH MÔ PHỎNG THÍ NGHIỆM TRONG GIÁO DỤC
Bài toán
Mô hình thử nghiệm cài đặt các thuật toán của phƣơng pháp Partical System mô phỏng hiệu ứng lửa làm tiền đề cho việc xây dựng mô phỏng thí nghiệm đốt thanh kim loại để thấy sự giãn nở vì nhiệt trong chƣơng trình sách giáo khoa Vật lý lớp 6. Trong thí nghiệm này mô phỏng các hiệu ứng đồ họa đƣợc xử lý bằng kỹ thuật Partical, bao gồm:
- Hiệu ứng ngọn lửa,
- Hiệu ứng thanh kim loại trong quá trình đốt cháy.
Phân tích thiết kế và lựa chọn công cụ
Ngọn lửa là một đối tƣợng không định hình, tức là nó chƣa đƣợc định nghĩa một cách rõ ràng và phƣơng pháp Partical phù hợp để mô phỏng cho những đối tƣợng đó. Thực hiện mô phỏng sự chuyển động ngọn lửa trong thí nghiệm đốt thanh kim loại, tác giả chỉ quan tâm đến một số mặt thể hiện của ngọn lửa khi chúng chuyển động, đó là chuyển động tịnh tiến theo phƣơng thẳng đứng và hƣớng lên trên.
Chƣơng trình mô phỏng sẽ bao gồm hai công việc sau:
- Xây dựng mô hình mô phỏng.
- Điều khiển mô hình bằng ngôn ngữ lập trình.
Xây dựng mô hình mô phỏng:
Bài toán đốt cháy thanh kim loại để thấy sự giãn nở vì nhiệt. Để có thể mô hình thí nghiệm này cần phải thực hiện:
+ Tạo mô hình dụng cụ thí nghiệm (Bàn thí nghiệm; Giá đỡ thanh kim loại; Thanh kim loại; Đèn; Ngọn lửa).
+ Tạo hiệu ứng thí nghiệm (Chuyển động của
ngọn lửa đang cháy; Chuyển động của thanh kim loại giãn nở ra dƣới tác động của ngọn lửa).
Điều khiển mô hình bằng ngôn ngữ lập trình:
Chƣơng trình thử nghiệm đốt cháy thanh kim loại đƣợc xây dựng sử dụng ngôn ngữ Visual C#, bộ thƣ viện XNAGS của Microsoft về đồ họa ba chiều.
Chƣơng trình thử nghiệm phải thể hiện đƣợc một hoặc một số hiệu ứng đồ họa trên cơ sở sử dụng kỹ thuật Partical để tạo hiệu ứng hình ảnh ba chiều.
Chƣơng trình thử nghiệm có chức năng lựa chọn riêng biệt hoặc đồng thời nhiều hiệu ứng đƣợc thể hiện trong việc mô phỏng lửa ba chiều.
Không gian mô phỏng cần thiết kế hỗ trợ các tầm nhìn toàn cảnh, cận cảnh để thấy rõ đƣợc việc thể hiện các hiệu ứng đồ họa.
Một số kết quả chƣơng trình
Sau đây là một số kết quả ảnh ba chiều thu đƣợc với các hiệu ứng đồ họa trên cơ sở sử dụng kỹ thuật Physically khi mô phỏng sự chuyển động của ngọn lửa trong quá trình thí nghiệm đốt thanh kim loại. Chƣơng trình dùng chuột để điều khiển xoay và dừng xoay mô hình, cho phép chúng ta quan sát sự chuyển động của lửa từ các phía; phím mũi tên lên xuống dùng để phóng to, thu nhỏ mô hình; dấu cách dùng để trở về trạng thái quan sát thẳng góc với mô hình...
Tiếng Việt
[1]. Vũ Đức Thông, Nghiên cứu kỹ thuật mô
phỏng lửa bằng phương pháp Particle và ứng
dụng, Luận văn thạc sĩ, Trƣờng ĐH Công Nghệ -
ĐHQG – Hà Nội, 2010.
[2]. W2G,JSC, Tổng quan về mô phỏng và thực
tại ảo, http://w2g.com.vn/default.php, ngày 22
tháng 2 năm 2006.
Tiếng Anh
[3]. William T. Reeves, Particle System A
Technique for Modeling a Class of Fuzzy
Objects,1983.
[4]. Source: wikipedia, Advanced Computer
Graphics, Bernhard Jung TU-BAF, Summer 2007.
[5]. Sanandanan Somasekaran, Using Particle
Systems to Simulate Real-Time Fire, 2005.
[6]. Samuel William Hasinoff. Three-Dimensional
Reconstruction of Fire from Images [2002].
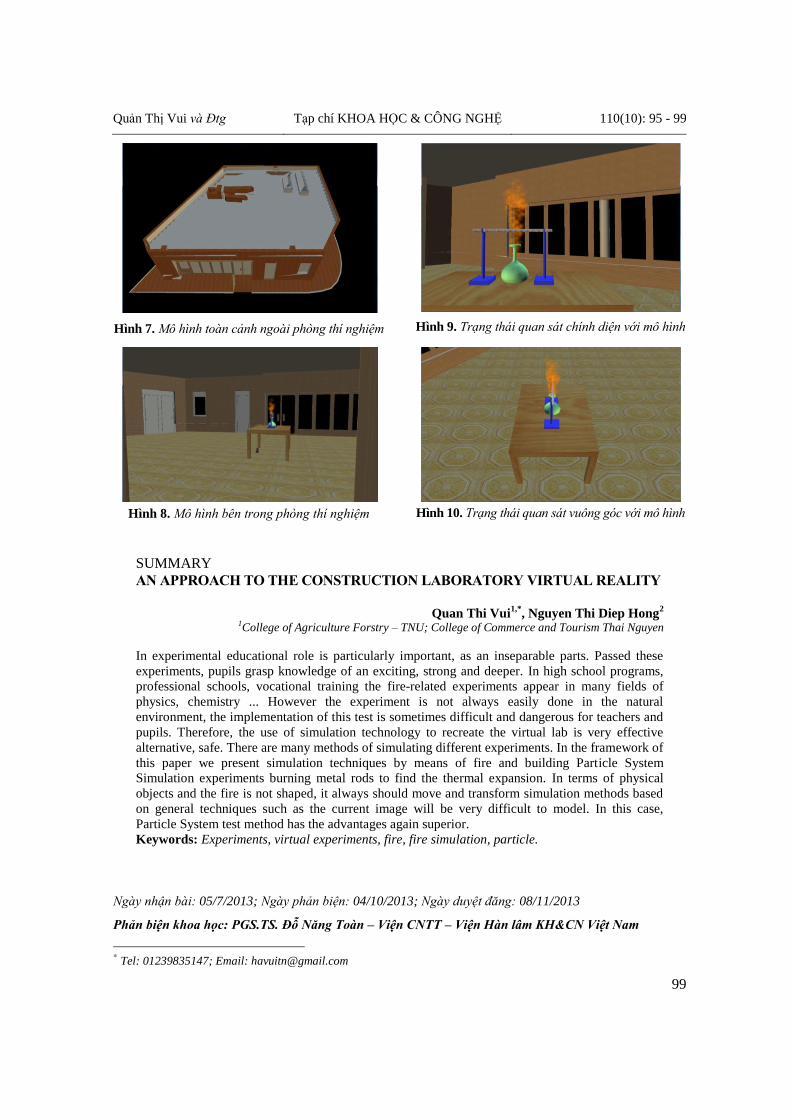
Quản Thị Vui và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 95 - 99
99
Hình 7. Mô hình toàn cảnh ngoài phòng thí nghiệm
Hình 8. Mô hình bên trong phòng thí nghiệm
Hình 9. Trạng thái quan sát chính diện với mô hình
Hình 10. Trạng thái quan sát vuông góc với mô hình
SUMMARY
AN APPROACH TO THE CONSTRUCTION LABORATORY VIRTUAL REALITY
Quan Thi Vui
1,*, Nguyen Thi Diep Hong
2
1College of Agriculture Forstry – TNU; College of Commerce and Tourism Thai Nguyen
In experimental educational role is particularly important, as an inseparable parts. Passed these
experiments, pupils grasp knowledge of an exciting, strong and deeper. In high school programs,
professional schools, vocational training the fire-related experiments appear in many fields of
physics, chemistry ... However the experiment is not always easily done in the natural
environment, the implementation of this test is sometimes difficult and dangerous for teachers and
pupils. Therefore, the use of simulation technology to recreate the virtual lab is very effective
alternative, safe. There are many methods of simulating different experiments. In the framework of
this paper we present simulation techniques by means of fire and building Particle System
Simulation experiments burning metal rods to find the thermal expansion. In terms of physical
objects and the fire is not shaped, it always should move and transform simulation methods based
on general techniques such as the current image will be very difficult to model. In this case,
Particle System test method has the advantages again superior.
Keywords: Experiments, virtual experiments, fire, fire simulation, particle.
Ngày nhận bài: 05/7/2013; Ngày phản biện: 04/10/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: PGS.TS. Đỗ Năng Toàn – Viện CNTT – Viện Hàn lâm KH&CN Việt Nam
* Tel: 01239835147; Email: [email protected]

Quản Thị Vui và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 94 - 99
100

Ngô Mạnh Tƣởng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 101 - 107
101
MỘT SỐ ỨNG DỤNG CỦA ĐẠI SỐ TUYẾN TÍNH TRONG KHAI PHÁ DỮ LIỆU
Ngô Mạnh Tƣởng
1, Đàm Thanh Phƣơng
1,*, Nguyễn Tuấn Linh
2
1Trường ĐH Công nghệ Thông tin và Truyền thông – ĐH Thái Nguyên 2Trường Cao đẳng Kinh tế Tài chính Thái Nguyên
TÓM TẮT Ý tƣởng và thuật toán từ số đại số tuyến tính đóng vai trò quan trọng trong một số lĩnh vực khai
phá dữ liệu. Bài báo trình bày phƣơng pháp sử dụng đại số tuyến tính trong khai thác văn bản và
tính toán hạng các trang cho các công cụ tìm kiếm web. Trọng tâm là phƣơng pháp chiết xuất
thông tin từ một ma trận dữ liệu bằng cách giảm hạng của ma trận. Xấp xỉ hạng của các ma trận
bằng cách sử dụng phân tích giá trị riêng và phƣơng pháp giá trị riêng để phân tích mạng.
Từ khoá: Khai phá dữ liệu, khai thác văn bản, đại số tuyến tính, ma trận, vectơ, giá trị riêng.
GIỚI THIỆU*
Khai phá dữ liệu là một khoa học liên ngành
sử dụng nhiều kỹ thuật trong khoa học máy
tính, thống kê, phân tích dữ liệu, nhận dạng
mẫu, đặc biệt là các kiến thức về đại số tuyến
tính và tối ƣu. Các kỹ thuật sử dụng đại số
tuyến tính nhận đƣợc nhiều sự quan tâm của
các tác giả, đặc biệt trong lĩnh vực khai thác
thông tin trong [1,2,3, 8, 13] và phân tích
mạng trong [11, 14, 16]. Mục đích của bài
báo là trình bày một số lĩnh vực khai phá dữ
liệu trong đó kỹ thuật đại số tuyến tính đóng
vai trò quan trọng.
Bài báo gồm 3 phần nhƣ sau: Phần 1 là phần
giới thiệu; Phần 2 trình bày ứng dụng của ma
trận, vectơ trong khai phá dữ liệu; Phần 3
trình bày phƣơng pháp sử dụng giá trị riêng
trong tính toán hạng các trang web. Cuối cùng
là phần kết luận.
MA TRẬN, VECTƠ TRONG KHAI PHÁ
DỮ LIỆU
Mục đích của bài toán chiết xuất thông tin là
để lấy tài liệu từ một cơ sở dữ liệu tài liệu phù
hợp nhất với yêu cầu truy vấn. Các kỹ thuật
của Đại số tuyến tính đƣợc sử dụng phù hợp
với từ vựng đơn giản và cũng cho các kỹ
thuật phù hợp với LSI (Latent Semantic
Indexing [5]). Sau đây là mô tả cách kết hợp
từ vựng đơn giản sử dụng đại số tuyến tính.
Giả sử có m từ ngữ (số hạng) và n tài liệu
trong một cơ sở dữ liệu tài liệu. m số hạng là
* Tel: 0912998749; Email: [email protected]
tập các từ ngữ trong tất cả các tài liệu. Ma
trận số hạng tài liệu A cấp m n , đƣợc lập
bằng cách coi các từ ngữ nhƣ các hàng và các
tài liệu nhƣ các cột. Phần tử ija của ma trận
A bằng 1 nếu từ ngữ i có mặt trong tài liệu
j , bằng 0 trong trƣờng hợp còn lại.
Vectơ truy vấn q cấp 1m đƣợc hình thành
bằng cách xét các từ ngữ mà ngƣời dùng quan
tâm. Phần tử thứ i của q bằng 1 nếu ngƣời
dùng quan tâm đến từ ngữ i , bằng 0 với các
trƣờng hợp khác. Ta có thể tìm thấy các tài
liệu phù hợp với từ ngữ truy vấn bằng cách
tính cosin của góc giữa vectơ tài liệu và vectơ
truy vấn, nó cho khoảng cách về mối liên
quan giữa hai vectơ này.
Xét ma trận số hạng tài liệu A . Ma trận µA
đƣợc lập từ A bằng cách tỷ lệ mỗi cột của A
để tất cả các vectơ cột là các vectơ đơn vị.
Các cột của cơ sở dữ liệu ma trận µA đƣợc
tính bằng công thức
$ 1, 1,2, ,K
j j
j
a a j na
.
Vectơ truy vấn q cũng đƣợc chuẩn hóa để trở
thành vectơ đơn vị. Đặt µATy q khi đó
$ cosi
T
i iy q a , với i là góc giữa vectơ
đơn vị q và $ia . Nếu cos i gần 1 hơn thì tài
liệu thứ i là tốt đối với vectơ truy vấn q .
Ví dụ 1. Ma trận số hạng tài liệu đƣợc sử
dụng trong truy vấn thông tin. Xét các thiết
lập sau đây của 5 tài liệu trong bảng 1.

Ngô Mạnh Tƣởng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 101 - 107
102
Bảng 1. Bảng tài liệu.
Terms Documents:
T1: bak(e, king)
T2: recipes
T3: bread
T4: cake
T5: pastr(y, ies)
T6: pie
D1: How to Bake Bread Without Recipes
D2: The Classic Art of Viennese Pastry
D3: Numerical Recipes: The Art of Scientific Computing
D4: Breads, Pastries, Pies and Cakes: Quantity Banking Recipes
D5: Pastry: A Book of Best French Recipes
Ta có ma trận số hạng tài liệu
µ
1 0 0 1 0
1 0 1 1 1
1 0 0 1 0
0 0 0 1 0
0 1 0 1 1
0 0 0 1 0
A .
Chuẩn hóa ma trận số hạng tài liệu ta đƣợc
0,5774 0 0 0,4082 0
0,5774 0 1 0,4082 0,7071
0,5774 0 0 0,4082 0
0 0 0 0,4082 0
0 1 0 0,4082 0,7071
0 0 0 0,4082 0
A .
Với vectơ truy vấn q , tìm cột ja của A
thỏa mãn dist , jq a tol , trong đó
2
2 2
, kho¶ng c¸ch Euclidean
dist , 1 cos , 1
arccos ,
T
x y
x yx y x y
x y
x y
Truy vấn: baking bread
$
1 0,7071
0 0
1 0,7071,
0 0
0 0
0 0
q q
0,7071 0 0,7071 0 0 0Tq .
Do đó
2 2
cos ,Tx y
x y tolx y
, với
1x y . Suy ra cosin mỗi cột của A là
0,8165 0 0 0,5772 0Tq A .
Với mức 0,5tol ta có hai tài liệu D1, D4
thỏa mãn.
LSI cũng tính cosin của góc giữa vectơ tài
liệu và vectơ truy vấn. LSI tính cosin của góc
trong việc giảm hạng của không gian vectơ tài
liệu. Nó sử dụng phƣơng pháp phân tích giá
trị riêng SVD (Singular Value
Decomposition) trong [9], để giảm hạng của
không gian vectơ tài liệu. Chi tiết của LSI
cùng với một ví dụ có thể đƣợc tìm thấy trong
[5] và [1]. Sau đây là lý thuyết phân tích giá
tri riêng.
Định lý 1 (Định lý 2.5.2 [9]). Nếu m nA ¡
và rank A r thì ta có thừa số
TA U V ,
trong đó ,m m n nU V¡ ¡ là các ma trận
trực giao và ij
là ma trận cấp m n
với các phần tử nằm ngoài phần đường chéo
chính bằng 0 và
11 22 1, 1 0rr r r qqL L ,
với min ,q m n hay 0
0, trong đó
0 là ma trận chéo
0 11 22diag , , , ,qqK
11 22 1, 1 0rr r r qqL L .
Chú ý:

Ngô Mạnh Tƣởng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 101 - 107
103
- Các số 11 22, , , rrK là các căn bậc 2 của
các giá trị riêng dƣơng của TA A và nhƣ vậy
nó là duy nhất. Các số đó đƣợc gọi là các giá
trị riêng của A .
- Các cột của V là các vectơ riêng của TA A ,
các cột của U là các vectơ riêng của TAA .
- Tích TA U V là phƣơng pháp phân tích
giá trị riêng SVD của A .
- Chia 1 2, , , mU u u uK và
1 2, , , nV v v vK vào các cột và ta có mở
rộng của tích TA U V là
11 1 1 22 2 2
T T T
rr r rA u v u v u vL .
Định lý 2 (Định lý 2.5.3 [9]). Cho m nA ¡ ,
rank A r , TA U V là phân tích giá trị
riêng của SVD của A . Giả sử
0T
k k k kA U V k r là ma trận cấp
m n , trong đó kU là ma trận cấp m k ,
gồm k cột đầu tiên của , kU V là ma trận cấp
n k gồm k cột đầu tiên của V và k là
ma trận chéo cấp k k , có các phần tử chéo
là k giá trị riêng lớn nhất của A . Khi đó
2 2 2
1 2 Lk k k rFA A
limFrank B k
A B
với T
k k k kB A U V .
Chứng minh định lý 1, 2 (xem [9], ch. 2)
Ma trận kA trong định lý 2 có hạng bằng k
là xấp xỉ của ma trận A có hạng bằng r nhƣ
sau:
11 1 1 22 2 2
T T T
k kk k kA u v u v u vL .
Điều đó có đƣợc bằng cách bỏ đi r k số
hạng cuối của ma trận A .
Xét ma trận số hạng tài liệu A , đƣợc phân
tích thành 3 ma trận , ,U V trong việc sử
dụng SVD. SVD đƣa ra dạng cấu trúc nghĩa
tiềm ẩn từ 3 ma trận thành phần , ,U V .
Khi đó ma trận kA sử dụng k giá trị riêng
lớn nhất đƣợc miêu tả trong định lý 2. Việc sử
dụng k giá trị riêng lớn nhất là xấp xỉ ma
trận số hạng tài liệu ban đầu A bởi kA . Đó là
cách giảm số chiều của không gian vectơ tài
liệu ban đầu. Vectơ truy vấn %q trong việc
giảm k không gian đƣợc tính toán nhƣ sau:
% 1T
k kq q U .
Vectơ truy vấn %q sẽ đƣợc so sánh với tất cả
các vectơ tài liệu. Để so sánh với vectơ truy
vấn %q , ta cần tính các vectơ tài liệu trong
việc rút gọn k không gian. Cột thứ j của
ma trận kA cho bởi k jA e , trong đó vectơ je
là cột thứ j của ma trận đơn vị cấp n n .
Vectơ ° jd của tài liệu thứ j trong việc rút
gọn k không gian đƣợc tính nhƣ sau:
° 1T
j k j k kd A e U , 1,2, ,Kj n .
Cosin của góc giữa vectơ truy vấn %q với
vectơ tài liệu ° jd đƣa ra khoảng cách về mối
liên hệ này. Cosin đƣợc tính bởi công thức
° %
° %2 2
cos
T
j
j
j
d q
d q, 1,2, ,Kj n .
Ví dụ 2. Ta trở lại ví dụ 1, sử dụng SVD. Ma
trận TA U V , trong đó:
0,2670 0,2567 0,5308 0,2847 0,7071 0
0,7479 0,3981 0,5249 0,0816 0 0
0,2670 0,2576 0,5308 0,2847 0,7071 0
0,1182 0,0127 0,2774 0,6394 0 0,7071
0,5198 0,8423 0,0838 0,1158 0 0
0,1182 0,0127 0,2774 0,6394 0 0,7071
U
1,6950 0 0 0 0
0 1,1158 0 0 0
0 0 0,8403 0 0
0 0 0 0,4195 0
0 0 0 0 0
0 0 0 0 0
0,4366 0,4717 0,3688 0,6715 0
0,3067 0,7549 0,0998 0,2760 0,5000
0,4412 0,3568 0,6247 0,1945 0,5000
0,4909 0,0346 0,5711 0,6571 0
0,5288 0,2815 0,3712 0,0577 0,7071
V
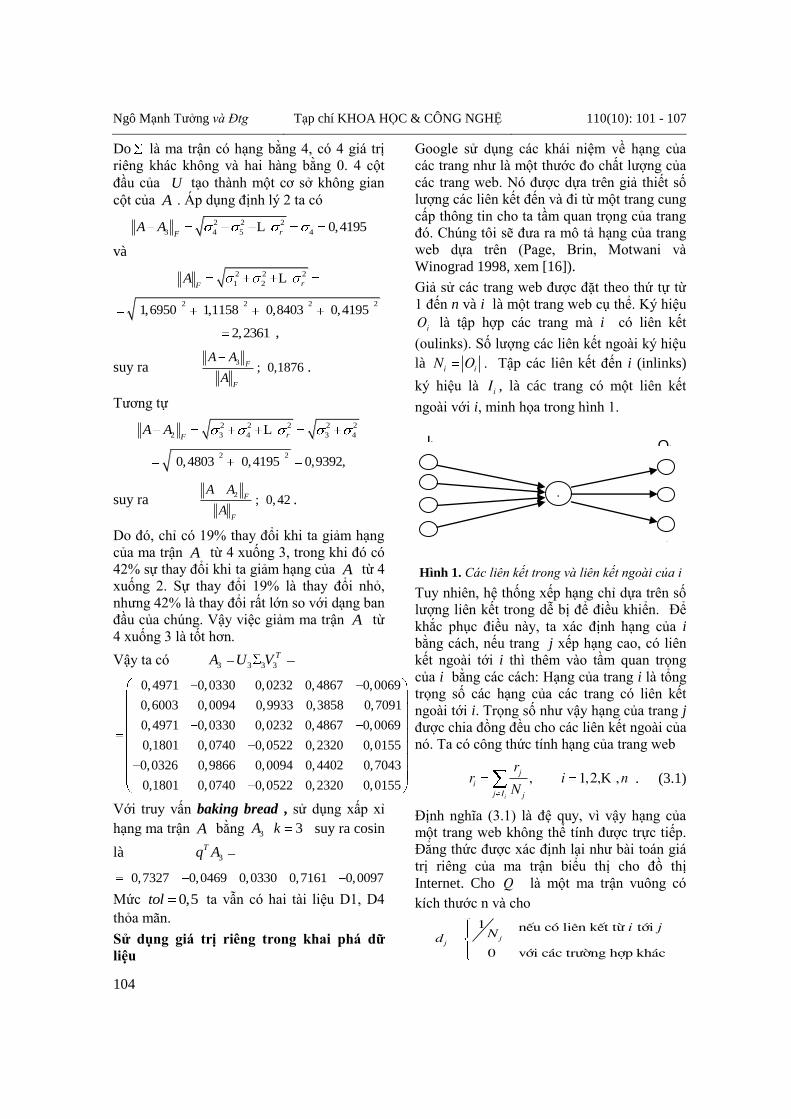
Ngô Mạnh Tƣởng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 101 - 107
104
Do là ma trận có hạng bằng 4, có 4 giá trị
riêng khác không và hai hàng bằng 0. 4 cột
đầu của U tạo thành một cơ sở không gian
cột của A . Áp dụng định lý 2 ta có
2 2 2
3 4 5 4 0,4195L rFA A
và
2 2 2
1 2 L rFA
2 2 2 21,6950 1,1158 0,8403 0,4195
2,2361 ,
suy ra 3
0,1876;F
F
A A
A.
Tƣơng tự
2 2 2 2 2
2 3 4 3 4L rFA A
2 20,4803 0,4195 0,9392,
suy ra 2
0,42;F
F
A A
A.
Do đó, chỉ có 19% thay đổi khi ta giảm hạng
của ma trận A từ 4 xuống 3, trong khi đó có
42% sự thay đổi khi ta giảm hạng của A từ 4
xuống 2. Sự thay đổi 19% là thay đổi nhỏ,
nhƣng 42% là thay đổi rất lớn so với dạng ban
đầu của chúng. Vậy việc giảm ma trận A từ
4 xuống 3 là tốt hơn.
Vậy ta có 3 3 3 3
TA U V
0,4971 0,0330 0,0232 0,4867 0,0069
0,6003 0,0094 0,9933 0,3858 0,7091
0,4971 0,0330 0,0232 0,4867 0,0069
0,1801 0,0740 0,0522 0,2320 0,0155
0,0326 0,9866 0,0094 0,4402 0,7043
0,1801 0,0740 0,0522 0,2320 0,0155
Với truy vấn baking bread , sử dụng xấp xỉ
hạng ma trận A bằng 3 3A k suy ra cosin
là 3
Tq A
0,7327 0,0469 0,0330 0,7161 0,0097
Mức 0,5tol ta vẫn có hai tài liệu D1, D4
thỏa mãn.
Sử dụng giá trị riêng trong khai phá dữ
liệu
Google sử dụng các khái niệm về hạng của
các trang nhƣ là một thƣớc đo chất lƣợng của
các trang web. Nó đƣợc dựa trên giả thiết số
lƣợng các liên kết đến và đi từ một trang cung
cấp thông tin cho ta tầm quan trọng của trang
đó. Chúng tôi sẽ đƣa ra mô tả hạng của trang
web dựa trên (Page, Brin, Motwani và
Winograd 1998, xem [16]).
Giả sử các trang web đƣợc đặt theo thứ tự từ
1 đến n và i là một trang web cụ thể. Ký hiệu
iO là tập hợp các trang mà i có liên kết
(oulinks). Số lƣợng các liên kết ngoài ký hiệu
là i iN O . Tập các liên kết đến i (inlinks)
ký hiệu là iI , là các trang có một liên kết
ngoài với i, minh họa trong hình 1.
Hình 1. Các liên kết trong và liên kết ngoài của i
Tuy nhiên, hệ thống xếp hạng chỉ dựa trên số
lƣợng liên kết trong dễ bị để điều khiển. Để
khắc phục điều này, ta xác định hạng của i
bằng cách, nếu trang j xếp hạng cao, có liên
kết ngoài tới i thì thêm vào tầm quan trọng
của i bằng các cách: Hạng của trang i là tổng
trọng số các hạng của các trang có liên kết
ngoài tới i. Trọng số nhƣ vậy hạng của trang j
đƣợc chia đồng đều cho các liên kết ngoài của
nó. Ta có công thức tính hạng của trang web
K, 1,2, ,i
j
i
j I j
rr i n
N . (3.1)
Định nghĩa (3.1) là đệ quy, vì vậy hạng của
một trang web không thể tính đƣợc trực tiếp.
Đẳng thức đƣợc xác định lại nhƣ bài toán giá
trị riêng của ma trận biểu thị cho đồ thị
Internet. Cho Q là một ma trận vuông có
kích thƣớc n và cho
1 nÕu cã liªn kÕt tõ tíi
0 víi c¸c trêng hîp kh¸c
jj
i jNd
i
Ii Oi

Ngô Mạnh Tƣởng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 101 - 107
105
Từ định nghĩa ta có hàng i có các phần tử
khác không ở những vị trí tƣơng ứng với các
liên kết trong của i. Tƣơng tự nhƣ vậy, cột j
có các phần tử khác không, bằng jN ở
những vị trí tƣơng ứng với các liên kết ngoài
của j và trang này có các liên kết ngoài, tổng
tất cả phần tử trong cột j bằng một. Ma trận
Q đƣợc minh họa trong hình 2, các phần tử
khác không đƣợc biểu thị bằng dấu *.
*
0
c¸c liªn kÕt trong0 * * *
0
*
c¸c liªn kÕt ngoµi
j
i
M
L L
M
Hình 2. Các phần tử của ma trận Q
Công thức (3.1) đƣợc viết lại
r Qr , (3.2)
tức là; r là một vectơ riêng của Q với giá trị
riêng bằng 1.
Giả sử rằng một ngƣời lƣớt web ghé thăm
một trang web, luôn luôn chọn trang tiếp theo
với các liên kết ngoài có xác suất bằng nhau.
Bƣớc đi ngẫu nhiên này tạo ra một chuỗi
Markov với quá trình chuyển đổi ma trận T
Q .
Một chuỗi Markov là một quá trình ngẫu
nhiên, với trạng thái tiếp theo đƣợc xác định
từ trạng thái hiện tại. Vectơ riêng r của ma
trận chuyển ứng với giá trị riêng bằng 1 tƣơng
ứng với phân bố xác suất của chuỗi Markov:
Các phần tử ở vị trí i , có ir là xác suất để
bƣớc ngẫu nhiên chọn trang web i. Trang
không có liên kết ngoài tƣơng ứng với một
cột bằng không trong Q . Mô hình đƣợc sửa
đổi để cột không đƣợc thay thế bằng một giá
trị hằng số (bằng xác suất để tới bất kỳ khác
trang trong mạng). Xác định các vectơ
1 nÕu 0
0 víi c¸c trêng hîp kh¸c
j
j
Nd
với K1,2, ,j n và M
1
1
1
e .
Khi đó, ma trận chuyển đƣợc định nghĩa
1 TP Q ed
n . (3.3)
Bây giờ, cho P là một ma trận cột ngẫu
nhiên, nó có phần tử không âm 0P và
T Te P e . (3.4)
Tƣơng tự (3.2), ta xác định hạng vectơ của
trang web là một vectơ riêng duy nhất của P
với giá trị riêng bằng 1,
Pr r .
Tính duy nhất của giá trị riêng đƣợc đảm bảo
theo định lý Perron-Frobenius, ta sẽ chỉ ra với
trƣờng hợp đặc biệt sau đây.
Định lý 3 (Định lý 1 [11]). Cho A là một ma
trận cột ngẫu nhiên bất khả quy. Khi đó độ
lớn của giá trị riêng lớn nhất bằng 1. Tính
duy nhất của vectơ riêng r tương ứng, thỏa
mãn 0r và 1
1r , đó là vectơ riêng
không âm. Nếu 0A thì
1, 2,3, ,i
i nK .
Chứng minh. Do A là ma trận cột ngẫu
nhiên, ta có T Te A e , tức là 1 là giá trị riêng
của A . Phần còn lại của định lý đƣợc chứng
minh bằng cách sử dụng Perron-Frobenius lý
thuyết (xem [15], ch. 8).
Để đảm bảo sự liên kết, tức là không bị mắc
kẹt trong một đồ thị con, ta sẽ tạo liên kết với
tất cả các trang web khác. Ma trận các số
hạng đƣợc thực hiện bằng cách lấy một tổ hợp
của P và xếp hạng ma trận đó,
11 T
A P een
, (3.5)
với thỏa mãn 0 1 . Rõ ràng A là
bất khả quy (từ 0A ) và cột ngẫu nhiên
11
1 .
T T T T
T T T
e A e P e een
e e e

Ngô Mạnh Tƣởng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 101 - 107
106
Sự thể hiện bƣớc ngẫu nhiên của việc thêm
một hạng là mỗi lần trang đƣợc truy cập,
ngƣời lƣớt web sẽ vào bất kỳ trang nào trong
toàn bộ các trang web với xác suất 1 .
Định lý 4 (Định lý 5.1 [14]). Giả sử các giá
trị riêng của ma trận cột ngẫu nhiên P là
K2 3
1, , , ,n . Khi đó các giá trị riêng của
ma trận
11 T
A P een
là K2 3
1, , , ,n .
(Chứng minh định lý xem [14]).
Vậy nếu P có nhiều giá trị riêng bằng 1, thì
độ lớn của vectơ riêng lớn nhất thứ 2 của A
luôn luôn là bằng . Vectơ riêng e trong
(3.5) có thể thay bằng một vectơ v không âm
với 1
1v .
Theo (3.3), P đƣợc xây dựng là
1 TP Q ed
n,
trong đó vectơ dòng d có các phần tử bằng 1
với tất cả những vị trí tƣơng ứng với các trang
web không có liên kết ngoài.
Ta có phép nhân y Az là
1 1
1,
T Ty Q ed z e e z
n n
Qz en
(3.8)
trong đó 1T Td z e z .
Tuy nhiên, ta không tính toán từ đẳng
thức này. Thay vào đó, ta sử dụng (3.7) kết
hợp với (3.8) ta đƣợc
11 T T Te Qz e e e Qz
n .
Vậy 1
1 Qz .
Ví dụ 3. Xét 6 nút web hình sau;
Ta có ma trận Google
0 1 / 2 1 / 2 0 0 0
0 0 0 0 0 0
1 / 3 1 / 3 0 0 1 / 3 0
0 0 0 0 1 / 2 1 / 2
0 0 0 1 / 2 0 1 / 2
0 0 0 1 0 0
P .
Hàng 2 của ma trận P các phần tử đều bằng 0,
vì trang web 2 không có liên kết ngoài, nên P
không phải là ma trận ngẫu nhiên, ta thêm
1 / 6 vào mỗi phần tử ở hàng 2 khi đó ta
đƣợc
1
0 1 / 2 1 / 2 0 0 0
1 / 6 1 / 6 1 / 6 1 / 6 1 / 6 1 / 6
1 / 3 1 / 3 0 0 1 / 3 0
0 0 0 0 1 / 2 1 / 2
0 0 0 1 / 2 0 1 / 2
0 0 0 1 0 0
P
Với 0,9 ta có
1
11 T
A P een
1 / 60 7 / 15 7 / 15 1 / 60 1 / 60 1 / 60
1 / 6 1 / 6 1 / 6 1 / 6 1 / 6 1 / 6
19 / 60 19 / 60 1 / 60 1 / 60 19 / 60 1 / 60
1 / 60 1 / 60 1 / 60 1 / 60 7 / 15 7 / 15
1 / 60 1 / 60 1 / 60 7 / 15 1 / 60 7 / 15
1 / 60 1 / 60 1 / 60 11 / 12 1 / 60 1 / 60
Khi đó vectơ
/T Te n
0,03721 0,05396 0,04151 0,3751 0,206 0,2862
Vậy các trang web có số điểm từ cao đến thấp
là 4, 6, 5, 3, 1. Do đó trang web 4 là quan trọng
nhất đối với truy vấn tài liệu có liên quan.
KẾT LUẬN
Bài báo tập trung chủ yếu vào phƣơng pháp
sử dụng đại số tuyến tính trong khai phá dữ
liệu, trọng tâm là việc sử dụng ma trận, vectơ,
giá trị riêng và sự phân tích giá trị riêng. Điều
đó cho thấy, phƣơng pháp sử dụng đại số
tuyến tính rất hữu ích cho phép tiếp cận vấn
đề trong thông tin và tính toán web.
1
2
3
4
5
6
Ngô Mạnh Tƣởng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 101 - 107
107
TÀI LIỆU THAM KHẢO
[1].M.W.Berry, Z.Drmac, E.R.Jessup (1999),
Matrices, Vectơr Spaces, and Information
Retrieval, SIAM Rev 41:335-362.
[2].M.W.Berry, S.T.Dumais and G.W.O’Brien
(1995), Using linear algebra for intelligent
information retrieval, SIAM Rev 37:573-595.
[3].K. Blom and A. Ruhe (2005), A Krylov
subspace method for information retrieval, SIAM
J. Matrix Anal. Appl. 26, 566-582.
[4].M. Chu, R. Funderlic and G. Golub (1995), A
rank-one reduction formula and its applications to
matrix factorization, SIAM Review 37, 512-530.
[5].S.Deerwester, S.Dumais, G.Furnas,
T.Landauer and R.Harshman (1990), Indexing by
latent semantic analysis, J. American Society for
Information Science 41:391-407.
[6].G. Eckart and G. Young (1936), The
approximation of one matrix by another of lower
rank, Psychometrika 1, 211-218.
[7].G. Golub and C. Greif (2004), Arnoldi type
algorithms for computing stationary distribution
vectơrs, with application to PageRank, Technical
Report SCCM- 04-15, Department of Computer
Science, Stanford University.
[8].N. Goharian, A. Jain and Q. Sun (2003),
Comparative analysis of sparse matrix algorithms
for information retrieva', Journal of Systemics,
Cybernetics and Informatics.
[9]. G.H.Golub, C.V.Loan (1996), Matrix
Computations, 3th edition, The Johns Hopkins
University Press, Baltimore and London.
[10]. G. Golub, K. S lna and P. Van Dooren
(2000), Computing the SVD of a general matrix
product/quotient, SIAM J. Matrix Anal. Appl. 22,
1-19
[11]. T. Haveliwala and S. Kamvar (2003b), The
second eigenvalue of the Google matrix, Technical
report, Computer Science Department, Stanford
University.
[12]. C. Van Loan (1976), Generalizing the
singular value decomposition, SIAM J.Numer.
Anal. 13, 76-83.
[13]. A. N. Langville and C. D. Meyer (2005b), A
survey of eigenvectơr methods for web
information retrieval, SIAM Review 47, 135-161.
[14]. A. Langville and C. Meyer (2005a), Deeper
inside PageRank, Internet Mathematics 1, 335-
380.
[15]. C. Meyer (2000), Matrix Analysis and
Applied Linear Algebra, SIAM, Philadelphia.
[16]. L. Page, S. Brin, R. Motwani and T.
Winograd (1998), The PageRank citation ranking:
Bringing order to the Web, Stanford Digital
Library Working Papers.
SUMMARY
SOME APPLICATIONS OF LINEAR ALGEBRA IN DATA MINING
Ngo Manh Tuong
1, Dam Thanh Phuong
1,*, Nguyen Tuan Linh
2
1College of Information and Communication Technology – TNU 2ThaiNguyen college of Economics and Finance
Ideas and algorithms from linear algebra are important in several areas of data mining. This paper
give an overview of using linear algebra methods in text mining and Pagerank computations for
web search engines. The emphasis is on rank reduction as a method of extracting information from
a data matrix, low rank approximation of matrices using the singular value decomposition and on
eigenvalue methods for network analysis.
Keywords: Data mining, text mining, linear algebra, matrice, vectơr, eigenvalue.
Ngày nhận bài: 22/8/2013; Ngày phản biện: 30/8/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: TS. Nguyễn Văn Tảo – Trường ĐH CNTT&TT – ĐHTN
* Tel: 0912998749; Email: [email protected]

Ngô Mạnh Tƣởng và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 101 - 107
108
Bùi Văn Chung và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 109 - 113
109
ĐIỀU KHIỂN MÔ HÌNH NỘI THÍCH NGHI MÔ HÌNH NHẬN DẠNG ONLINE
Bùi Văn Chung
*, Đỗ Thị Mai, Lê Thị Thu Huyền
Trường ĐH Công nghệ thông tin và Truyền thông – ĐH Thái Nguyên
TÓM TẮT Phƣơng pháp điều khiển mô hình nội IMC đã đƣợc ứng dụng rất rộng rãi cho hệ thống tuyến tính
và đã thu đƣợc nhiều kết quả to lớn nhờ những ƣu việt của bộ điều khiển IMC. Tuy nhiên trong
thực tế hệ thống có những tác động không mong muốn ở đầu vào và đầu ra (nhiễu ngẫu nhiên) làm
cho việc ứng dụng bộ điều khiển IMC là không thực thi. Để khắc phục nhƣợc điểm đó, trong bài
báo nhóm tác giả sẽ trình bày phƣơng pháp kết hợp sử dụng giữa bộ điều khiển mô hình IMC và
thuật toán nhận dạng online cho lớp các mô hình biến đổi để thu đƣợc những kết quả mới.
Từ khóa: Phương pháp IMC, nhận dạng online, nhận dạng hệ thống, mô hình nội, bộ điều khiển IMC.
ĐẶT VẤN ĐỀ*
Ta đã biết mô hình nội (IMC – Internal Model
Controller) đã đƣợc Morari và Zafriou phát
triển năm 1989 và đƣợc ứng dụng rất nhiều
trong thực tế. Những ƣu điểm của điều khiển
mô hình nội nhƣ: hệ thống ổn định chi phụ
thuộc vào đối tƣợng và bộ điều khiển, khả
năng khử nhiễu tốt, ổn định cao.... Song ta chỉ
có thể áp dụng đƣợc bộ điểu khiển IMC nếu
biết chính xác mô hình toán học của đối
tƣợng. Trong trƣờng hợp không biết rõ đặc
tính của đối tƣợng hay đối tƣợng là hệ không
ổn định thì không thể áp dụng đƣợc bộ điều
khiển IMC. Khi đó cần kết hợp bộ điều khiển
IMC với một phƣơng pháp khác để vừa tận
dụng đƣợc những ƣu điểm của bộ điều khiển
IMC vừa có khả năng mở rộng đƣợc lớp bài
toán ứng dụng. Trong bài báo này, nhóm tác
giả đề xuất phƣơng pháp nhận dạng online kết
hợp với bộ điều khiển IMC để điều khiển hệ
thống có nhiễu ngẫu nhiên tác động vào sao
cho kết quả đầu ra bám theo giá trị đặt khi
không hiểu rõ ràng về đối tƣợng điều khiển.
Kết quả của đề tài có tính ứng dụng cao trong
thực tế cho cả hệ tuyến tính, phi tuyến có
nhiễu tác động ngẫu nhiên.
PHƢƠNG PHÁP ĐIỀU KHIỂN THEO
NGUYÊN LÝ MÔ HÌNH NỘI
Xét hệ điều khiển vòng hở nhƣ trên hình 1.
Trong đó q(s) là bộ điều khiển nhằm điều
khiển đối tƣợng Gp(s). Gọi ~
( )pG s là mô hình
* Tel: 0943930260; Email: [email protected]
của quá trình cần điều khiển. Hiển nhiên nếu
giả sử rằng nếu sử dụng bộ điều khiển cân
bằng mô hình, mô tả bởi ~
1q( ) ( )ps G s thì
hệ điều khiển theo vòng hở trong hình 1 sẽ
đảm bảo những chất lƣợng cơ bản mong
muốn nhƣ ổn định, sai lệch tĩnh bằng 0…song
vì nhiều lý do nhƣ hệ không nhân quả, hệ bị
nhiễu n(t) tác động thêm ở đầu ra hay mô
hình của đối tƣợng là không chính xác mà bộ
điều khiển q(s) không thể thực thi cũng nhƣ
không sử dụng đƣợc.
Hình 1. Cấu trúc hệ điều điều khiển vòng hở
Do vậy, phƣơng pháp điều khiển vòng hở
kiểu IMC không đáp ứng đƣợc việc duy trì
đầu ra (output) bằng giá trị đặt (input). Chiến
lƣợc điều khiển IMC đƣợc mô tả nhƣ sau:
Hình 2. Cấu trúc mạch vòng kín điều khiển IMC
Danh sách hàm truyền thay đổi thể hiện trong
sơ đồ khối IMC đƣợc cho ở dƣới.
q(s) ( )G sp
setpoint output

Bùi Văn Chung và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 109 - 113
110
Với ( )d s : nhiễu; ( )d s% : nhiễu đƣợc ƣớc
lƣợng; ( )pg s : quá trình; ( )pg s% : mô hình quá
trình; ( )q s : bộ điều khiển mô hình nội; ( )r s :
điểm đặt; ( )r s% : điểm đặt đƣợc điều chỉnh;
( )u s : đầu vào đƣợc điều khiển (đầu ra bộ
điều khiển); ( )y s : đầu ra quá trình đƣợc
đo; ( )y s% : đầu ra mô hình.
Trong sơ đồ trên thì d(s) là nhiễu không xác
định tác động vào hệ thống. Đầu ra Y(s) đƣợc
so sánh với đầu ra của mô hình U(s) và tạo tín
hiệu^
( )d s đƣa về so sánh với giá trị đặt, ^ ~
( ) . ( ) ( )( ) ( )p pd s U s d sG s G s
Nếu d(s) = 0 thì giá trị ^
( )d s chính là đại
lƣợng đặc trƣng cho sai lệch giữa quá trình và
mô hình của nó. Khi Gp(s) = ~
( )pG s thì
^
( )d s chính là nhiễu không xác định. Bởi vì
^
( )d s liên quan đên sai lệch mô hình ~
( )pG s
nên nó đƣợc dùng để nâng cao chất lƣợng
điểu khiển. Ở đây giá trị sai lệch E(s) đƣợc
tính: E(s) = R(s) -^
( )d s , khi đó tín hiệu điều
khiển đƣợc xác định nhƣ sau: ~^
( ) . ( ) ( ) . ( ) ( ) . ( )( ) ( )( ) ( ) c cppU s G s R s U s d S G sG s G sR s d s
(1.3)
Bằng phép biến đổi ta thu đƣợc:
~
. ( )( ) ( )( )
1 . ( )( ) ( )
c
cp p
G sR s d sU s
G sG s G s
(1.4)
Do có đầu ra quá trình:
Y(s) = Gp(s).U(s) + d(s), nên hàm truyền của
sơ đồ điều khiển IMC mạch vòng kín là:
~
. ( ). ( )( ) ( )( ) ( )
1 . ( )( ) ( )
c p
cp p
G s G sR s d sY s d s
G sG s G s
(1.5)
Từ (1.4) và (1.5) ta có: ~
~
( ). ( ). ( ) . ( )1 ( ). ( )( )
1 . ( )( ) ( )
c p pc
cpp
G s G s R s d sG s G sY s
G sG s G s
(1.6)
Từ biểu thức (1.6) chúng ta có thể thấy rằng
nếu q(s) = ~
1( )pG s và nếu Gp(s) = ~
( )pG s ,
thì có thể loại bỏ hoàn toàn nhiễu và quá trình
điều khiển là hoàn hảo. Và cũng nhìn vào đó
về mặt lý thuyết mặc dù Gp(s) ≠~
( )pG s thì
vẫn có thể loại bỏ hoàn toàn nhiễu nếu có q(s)
= ~
1( )pG s . Nhƣ vậy có thể đƣa đến sơ đồ
nhƣ hình 3.
Hình 3. Sơ đồ rút gọn
Trong hình 3 đƣờng nét chấm biểu thị những
tính toán của IMC.
Yêu cầu về tính thực hiện đƣợc của q(s) trong
bộ điều khiển IMC là phải thỏa mãn các tiêu chí
tính ổn định, tính hợp thức, tính nhân quả.
Nhƣ vậy bộ điều khiển IMC với hàm truyền
q(s) trong sơ đồ cấu trúc ở hình 2.2 có nhiễu
tần số cao d(s) tác động ở đầu ra, đƣợc thiết
kế theo các bƣớc sau:
1) Xác định hàm truyền ~
( )pG s
của đối
tƣợng điều khiển.
2) Xác định bộ điều khiển q(s) theo công
thức q(s) = ~
1( )pG s . Trong trƣờng hợp
không nghịch đảo đƣợc, ngƣời ta viết tách
( )pg s% thành hai phần :
( ) ( ) ( )p p pg s g s g s% % % với ( )pg s% là thành
phần không nghịch đảo đƣợc và ( )pg s% là
thành phần khả nghịch thì có 1( ) ( )pq s g s% % thì ( )q s% theo cách thực hiện
trên cũng là ổn định và nhân quả.
3) Bổ sung q(s) với mạch lọc f(s) có dạng 1
( )( 1)n
f ss
với λ hằng số thời gian và
n là bậc của bộ lọc. Bộ điều khiển bây giờ trở

Bùi Văn Chung và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 109 - 113
111
thành 1( ) ( ) ( ) ( ) ( )pq s q s f s g s f s% % , phần
thêm vào này cần ổn định, nhân quả và hợp
thức. Chú ý rằng bậc n càng lớn, tín hiệu
nhiễu sẽ đƣợc lọc càng tốt về mặt biên độ,
song sai lệch pha ở chế độ xác lập khi tín hiệu
vào u(t) có dạng điều hòa sẽ càng cao.
4) Xác định bộ điều khiển mô hình nội q(s)
theo công thức trên.
NHẬN DẠNG BỊ ĐỘNG THAM SỐ
MÔ HÌNH
Bài toán nhận dạng bị động hay còn gọi là
nhận dạng on-line. Trong bài toán này thì tín
hiệu đầu vào u(t) không đƣợc biết trƣớc, để
nhận dạng đƣợc ta phải đo cả tín hiệu vào u(t)
và tín hiệu ra y(t).
Xét bài toán nhƣ sau: cho đối tƣợng đƣợc mô
tả bởi hình 3, giả thiết là tuyến tính, dƣới
dạng phƣơng trình sai phân. Từ các giá trị đã
đo đƣợc của các tín hiệu đầu vào là { }ku và
của các tín hiệu đầu ra {y }k , k=0…N, hãy
xác định các tham số 1 1, ,..., , ,...,
a bn nK a a b b
của mô hình sao cho sai lệch giữa mô hình và
đối tƣợng là nhỏ nhất.
Hình 4. Mô hình bài toán nhận dạng bị động
Để giải quyết vấn đề này có hai cách [2]:
Cách 1: Nhận dạng các tham số
1 1, ,..., , ,...,a bn nK a a b b trực tiếp từ dãy các giá
trị đo đƣợc { }ku , {y }k sao cho tổng bình
phƣơng sai lệch mở rộng giữa mô hình và đối
tƣợng là nhỏ nhất.
Cách 2: Chuyển bài toán về dạng chủ động và
sử dụng các thuật toán nhận dạng chủ động
tham số mô hình đã biết.
Trong bài báo này ta chọn cách 1.
Từ hình 2.3 ta có phƣơng trình hàm truyền [1]: 1
1
1
1
1 ...( )( )
( ) 1 ...
b
b
a
a
n
n
n
n
b z b zY zG z K
U z a z a z
(1.7)
Để đơn giản ta chuyển thành 1
0 1
1
1
.... ( )( )
( )1 ...
b
b
a
a
n
n
n
n
b b z b z B zG z
A za z a z
% % % (1.8)
So sánh ta có đƣợc:
0, 0,...., ; 1i i bb Kb i n b% .
Dạng tƣơng đƣơng của 1
0bn
n k n k
k
c b c với
1n đƣợc viết trực tiếp theo quan hệ vào ra
của tín hiệu trong miền thời gian là:
1 1 0 1 1... ...a a b bk k n k n k k n k ny a y a y b u b u b u% % %
và chỉ đúng khi ( ) 0n t và các giá trị đo
đƣợc { }ku , {y }k là chính xác. Song trong
thực tế vẫn tồn tại sai số tức là có
1
1 0
a bn n
k i k i k i
i i
y a u b u% . Kí hiệu sai số là
e(t) thì 1
1 0
( )a bn n
k i k i k i
i i
e t y a u b u%
Giá trị tổng bình phƣơng sai lệch mở rộng đó
đƣợc viết thành [1]:
2 2
1
1
( )a a
N N N
k k i k i k i
k n k n i
Q e y a y b u% (1.10
) trong đó để chỉ những giá trị ku , ky đã đo
trong khoảng k = 0,1,2…N tham gia vào thuật
toán thì ke phải có ,...,ak n N tức là
aN n , bài toán đƣợc phát biểu lại nhƣ sau:
trên cơ sở quan sát các tính hiệu vào/ra, hãy
xác định 1 0,.., , ,...,
a bn na a b b% % sao cho
minQ .
Ký hiệu các vecto:
1
1 0
1 1 1
0
1
... ... ...
... ....... , ,
... ... ... ... ... ...
... ... ....
a a a b
a
aa a a a
a b
b
n n n n
nn
n n n n
N
N N n N N n
n
a
y y u uy
a y y u uy p M
by
y y u u
b
%
%
(1.11)

Bùi Văn Chung và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 109 - 113
112
Giải hệ kết hợp (1.10) và (1.11) ta sẽ có
( ) ( )T T T T T T TQ y Mp y Mp y y y Mp p M y p M Mp
Giả thiết thêm ma trận vuông TS M M
không suy biến thì, 1 ( ) ( )T T T T T TQ y y y MS M y M y Sp M y Sp
Đẳng thức trên có thành phần thứ ba bên vế
phải là thành phần duy nhất chƣa vecto p phải
tìm. Bởi vậy, do S xác định tƣơng đƣơng nên
Q sẽ nhận gái trị nhỏ nhất khi và chỉ khi. 10 T TM y Sp p S M y
(1.12)
Đây chính là công thức xác định các tham số
của mô hình.. Từ đó đi đến thuật toán nhƣ
sau:
1) Lập vector y
và ma trận M, S từ dãy các
giá trị { }ku
, {y }k , k=0,…,N đã đo đƣợc của
tín hiệu.
2) Kiểm tra tính không suy biến cũng nhƣ
tính xác định dƣơng của ma trận S.
3) Tính vector p
của tham số mô hình . Có
thể sử dụng hàm cholesky() để giải hệ
phƣơng trình tuyến tính này.
MÔ PHỎNG
Xem xét lại mô hình nhƣ hình 2 ở đây giả sử
rằng đối tƣợng không biết trƣớc, ta sử dụng
thuật toán nhận dạng để xác định đƣợc mô
hình của đối tƣợng. Nhƣ vậy giữa đối tƣợng
và mô hình đối tƣợng sẽ tồn tại một sai lệch
e(t). Ta sẽ thực hiện nhận dạng online cho mô
hình của đối tƣợng và sử dụng vòng điều
khiển kín và bộ điều khiển IMC để điều khiển
đối tƣợng sao cho đầu ra có sai lệch nhỏ nhất
so với đầu vào. Bài toán mô phỏng trên
Matlab Simulink [3],[4].
Mô hình mô phỏng khi Gp(s) =
~
( )pG s
Hình 5. Mô hình vòng hở
Hình 6. Mô hình vòng kín
Kết quả mô phỏng:
Hình 7. Không sử dụng bộ điều khiển IMC
Khi mô hình và đối tƣợng là nhƣ nhau thì đáp
ứng đầu ra là nhƣ nhau.
Hình 8. Kết quả mô phỏng khi mô hình và đối
tượng bằng nhau(sử dụng IMC)
Kết quả đáp ứng đầu ra khi sử dụng bộ điều
khiển IMC điều khiển khi mô hình và đối
tƣợng bằng nhau.
Trong bài toán này ta sử dụng thuật toán nhận
dạng online kết hợp bộ điều khiển IMC để
điều khiển mô hình. [2]. Sơ đồ khối mô
phỏng nhƣ trên hình 9.
Sau khi thực hiện việc nhận dạng mô hình
cho đối tƣợng và thiết kế bộ điều khiển IMC
theo mô hình đối tƣợng nhận dạng đƣợc và

Bùi Văn Chung và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 109 - 113
113
điều khiển đối tƣợng thì có kết quả đáp ứng
đầu ra với nhiễu ngẫu nhiên tác động ở đầu ra
nhƣ trên hình 10.
Hình 9. Mô hình đối tượng khi kết hợp IMC và
thuật toán nhận dạng online
Hình 10. Kết quả đầu ra khi kết hợp IMC và
thuật toán nhận dạng online
Ta thấy rằng bộ điều khiển IMC làm cho hệ
thống bám giá trị đặt rất tốt mặc dù cho nhiễu
tác động vào hệ thống.
KẾT LUẬN
Nhƣ vậy với việc sử dụng bộ điều khiển IMC
với những ƣu điểm của nó đã đƣợc kiểm
chứng và ứng dụng trong hệ thống ổn định
tuyến tính kết hợp với điều khiển online – điều
khiển thích nghi đã mở rộng đƣợc lớp bài toán
ứng dụng cho bộ điều khiển IMC và ứng dụng
rộng rãi hơn trong lý thuyết và thực tế.
Trong giới hạn của đề tài, nhóm tác giả đã
tìm hiểu đƣợc bộ điều khiển mô hình nội,
thuật toán xây dựng bộ điều khiển mô hình
nội, thuật toán nhận dạng online và mô
phỏng mô hình…tiếp theo nhóm tác giả tiếp
tục nghiên cứu để mở rộng mô phỏng cho
một đối tƣợng vật lý cụ thể để có đƣợc kết
quả thuyết phục hơn.
TÀI LIỆU THAM KHẢO
[1]. Nguyễn Doãn Phƣớc, (2001). Lý thuyết điều
khiển tuyến tính. Nxb Khoa học và Kỹ thuật.
[2]. Nguyễn Doãn Phƣớc, Phan Xuân Minh,
(2001). Nhận dạng điều khiển. Nxb Khoa học và
Kỹ thuật.
[3]. Nguyễn Phùng Quang, (2004). Matlab và
Simulink dành cho kỹ sư điều khiển tự động. Nxb
Khoa học và Kỹ thuật.
[4]. B.Wayne Bequette, Process Control
Modelling, Design and Simulation, Prentice Hall
International Series in the Physical and Chemical
Engineering Sciences.
SUMMARY
INTERNAL MODEL CONTROL FOR ADAPTING WITH IDENTIFICATION
MODEL ONLINE Bui Van Chung
*, Do Thi Mai, Le Thi Thu Huyen
College of Information and Communication Technology – TNU
Method of control the IMC model has been widely applied to linear systems and got great results
by the best features (characteristics)of internal model control. But in the practice, using the IMC in
the random systems is difficult and sometime this is imppossible to get desire results. In this
article, the author show method of using the IMC model combines with identification algorithm
online for refomative models to getting news resutls, which have possible application
Keywords: IMC method, identification online, identification systems, internal model control, the
IMC model.
Ngày nhận bài: 09/8/2013; Ngày phản biện: 25/9/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: TS. Nguyễn Duy Minh – Trường ĐH CNTT&TT – ĐHTN
* Tel: 0943930260; Email: [email protected]

Bùi Văn Chung và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 109 - 113
114

Vũ Khánh Quý và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 115 - 121
115
CHUYỂN GIAO TRONG HỆ THỐNG MẠNG WLAN\LTE
DỰA TRÊN GIAO THỨC IEEE 802.21
Vũ Khánh Quý
1,*, Nguyễn Chiến Trinh
2, Hồ Khánh Lâm
1
1Đại học Sư phạm Kỹ thuật Hưng Yên 2Học viện Công nghệ Bưu chính Viễn thông
TÓM TẮT Các dịch vụ đa phƣơng tiện chạy trên nền mạng thông tin di động yêu cầu tốc độ và băng thông
ngày càng lớn. Để giảm tải và tăng cƣờng năng lực tổng thể của mạng di động, liên mạng giữa
mạng cục bộ không dây (WLAN) và mạng tế bào (Cellular) đƣợc xem xét. Trong liên mạng
Cellular / WLAN, hiệu năng của toàn hệ thống liên quan chặt chẽ với độ trễ của tiến trình bàn giao
dọc giữa hai mạng. Một cơ chế kích hoạt chuyển giao giữa hai mạng làm giảm độ trễ của toàn bộ
tiến trình bàn giao, từ đó tăng hiệu quả toàn hệ thống là vấn đề cần đƣợc nghiên cứu. Trong bài
báo này, chúng tôi đề xuất một cơ chế kích hoạt thực hiện chuyển giao giữa hai mạng (DR-HTM)
dựa trên chuẩn chuyển giao độc lập với môi trƣờng 802.21 MIH (802.21 Media Independent
Handover) để tối ƣu hóa công suất của cả hai mạng WLAN và mạng Cellular. Trong DR-HTM,
bất cứ khi nào một nút di động phát hiện ra WLAN, nó kiểm tra đƣợc tốc độ truyền của mạng
WLAN bằng cách sử dụng dịch vụ MIH từ xa. Dựa trên các thông tin, nút di động quyết định thực
hiện chuyển giao. Để đánh giá hiệu năng của DR-HTM, chúng tôi đã thực hiện mô phỏng cơ chế
kích hoạt chuyển giao dựa trên tốc độ dữ liệu và cƣờng độ tín hiệu. Kết quả trả về cho thấy, tải của
mạng Cellular đƣợc chia sẻ hiệu quả với mạng WLAN và năng lực tổng thể mạng lƣới đƣợc tối ƣu
bằng cách sử dụng DR-HTM.
Từ khóa: WLAN, LTE, Vertical Handover.
TỔNG QUAN*
Hiện nay, điện thoại thông minh với các ứng
dụng đa phƣơng tiện đƣợc sử dụng phổ biến
trên toàn cầu dẫn đến nhu cầu truy cập tốc độ
dữ liệu cao trên hệ thống mạng di động ngày
càng tăng cao. Theo một khảo sát của Bộ
Thông tin và Truyền thông về mức độ hài
lòng của ngƣời dùng di động tại Việt Nam
vào ngày 10/05/2013 cho thấy, số ngƣời dùng
các dịch vụ đa phƣơng tiện trên thiết bị
Smartphone tại Việt Nam tăng gần 5 lần so
với năm 2011, trong đó 70% khách hàng lựa
chọn nhà cung cấp dịch vụ dựa trên chất
lƣợng kết nối và tốc độ mạng; mặt khác, trên
50% khách hàng phàn nàn về chất lƣợng dịch
vụ mạng chƣa ổn định cho các ứng dụng cần
đảm bảo QoS [1]. Tuy nhiên, đây là một vấn
đề các nhà cung cấp dịch vụ đang gặp nhiều
khó khăn do chi phí cao. Để nâng cao năng
lực của mạng di động với những thay đổi nhỏ
và chi phí thấp, thực hiện kết hợp ƣu điểm
giữa mạng di động và mạng LAN không dây
* Email: [email protected]
(WLAN) đã đƣợc coi là giải pháp tốt [2] -
[4]. Mạng WLAN theo chuẩn IEEE 802.11
cung cấp tốc độ truyền dữ liệu cao, trong khi
vùng phủ sóng dịch vụ của nó là tƣơng đối
nhỏ và tính di động thấp, mặt khác, mạng di
động phủ sóng hầu hết các khu vực, hỗ trợ
tính di động cao nhƣng tốc độ dữ liệu chỉ ở
mức tƣơng đối và thấp hơn rất nhiều so với
mạng WLAN. Vì vậy, tích hợp các ƣu điểm
nổi trội của mạng WLAN và mạng di động sẽ
đem lại nhiều lợi ích cho cả ngƣời dùng và
nhà cung cấp dịch vụ [2] - [5]. Đặc biệt, các
mạng di động có thể tăng số ngƣời dùng với
tốc độ dữ liệu cao bằng cách chia sẻ tải lƣu
lƣợng của nó cho WLAN.
Trong mạng thông thƣờng, để thông tin một
nút di động (MN) có thể vào đƣợc trong môi
trƣờng WLAN, chúng sử dụng cơ chế kích
hoạt chuyển giao dựa trên cƣờng độ tín hiệu
(RSS) đo đƣợc từ phía MN [6]. Tuy nhiên,
trong liên mạng WLAN / Cellular, rất khó để
so sánh giá trị tuyệt đối của RSS từ trạm gốc
của tế bào (BS) và điểm truy cập (AP) của
mạng WLAN do đặc điểm của giao diện vật
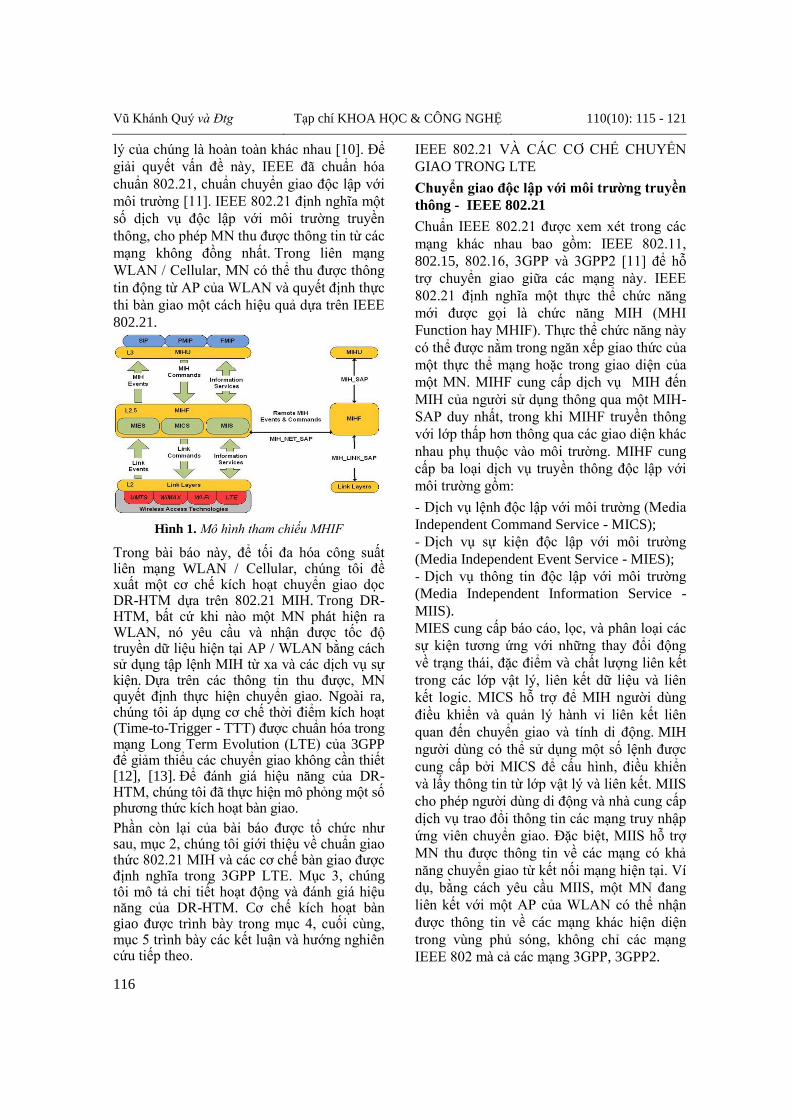
Vũ Khánh Quý và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 115 - 121
116
lý của chúng là hoàn toàn khác nhau [10]. Để
giải quyết vấn đề này, IEEE đã chuẩn hóa
chuẩn 802.21, chuẩn chuyển giao độc lập với
môi trƣờng [11]. IEEE 802.21 định nghĩa một
số dịch vụ độc lập với môi trƣờng truyền
thông, cho phép MN thu đƣợc thông tin từ các
mạng không đồng nhất. Trong liên mạng
WLAN / Cellular, MN có thể thu đƣợc thông
tin động từ AP của WLAN và quyết định thực
thi bàn giao một cách hiệu quả dựa trên IEEE
802.21.
Hình 1. Mô hình tham chiếu MHIF
Trong bài báo này, để tối đa hóa công suất liên mạng WLAN / Cellular, chúng tôi đề xuất một cơ chế kích hoạt chuyển giao dọc DR-HTM dựa trên 802.21 MIH. Trong DR-HTM, bất cứ khi nào một MN phát hiện ra WLAN, nó yêu cầu và nhận đƣợc tốc độ truyền dữ liệu hiện tại AP / WLAN bằng cách sử dụng tập lệnh MIH từ xa và các dịch vụ sự kiện. Dựa trên các thông tin thu đƣợc, MN quyết định thực hiện chuyển giao. Ngoài ra, chúng tôi áp dụng cơ chế thời điểm kích hoạt (Time-to-Trigger - TTT) đƣợc chuẩn hóa trong mạng Long Term Evolution (LTE) của 3GPP để giảm thiểu các chuyển giao không cần thiết [12], [13]. Để đánh giá hiệu năng của DR-HTM, chúng tôi đã thực hiện mô phỏng một số phƣơng thức kích hoạt bàn giao.
Phần còn lại của bài báo đƣợc tổ chức nhƣ sau, mục 2, chúng tôi giới thiệu về chuẩn giao thức 802.21 MIH và các cơ chế bàn giao đƣợc định nghĩa trong 3GPP LTE. Mục 3, chúng tôi mô tả chi tiết hoạt động và đánh giá hiệu năng của DR-HTM. Cơ chế kích hoạt bàn giao đƣợc trình bày trong mục 4, cuối cùng, mục 5 trình bày các kết luận và hƣớng nghiên cứu tiếp theo.
IEEE 802.21 VÀ CÁC CƠ CHẾ CHUYỂN
GIAO TRONG LTE
Chuyển giao độc lập với môi trƣờng truyền
thông - IEEE 802.21
Chuẩn IEEE 802.21 đƣợc xem xét trong các
mạng khác nhau bao gồm: IEEE 802.11,
802.15, 802.16, 3GPP và 3GPP2 [11] để hỗ
trợ chuyển giao giữa các mạng này. IEEE
802.21 định nghĩa một thực thể chức năng
mới đƣợc gọi là chức năng MIH (MHI
Function hay MHIF). Thực thể chức năng này
có thể đƣợc nằm trong ngăn xếp giao thức của
một thực thể mạng hoặc trong giao diện của
một MN. MIHF cung cấp dịch vụ MIH đến
MIH của ngƣời sử dụng thông qua một MIH-
SAP duy nhất, trong khi MIHF truyền thông
với lớp thấp hơn thông qua các giao diện khác
nhau phụ thuộc vào môi trƣờng. MIHF cung
cấp ba loại dịch vụ truyền thông độc lập với
môi trƣờng gồm:
- Dịch vụ lệnh độc lập với môi trƣờng (Media
Independent Command Service - MICS);
- Dịch vụ sự kiện độc lập với môi trƣờng
(Media Independent Event Service - MIES);
- Dịch vụ thông tin độc lập với môi trƣờng
(Media Independent Information Service -
MIIS).
MIES cung cấp báo cáo, lọc, và phân loại các
sự kiện tƣơng ứng với những thay đổi động
về trạng thái, đặc điểm và chất lƣợng liên kết
trong các lớp vật lý, liên kết dữ liệu và liên
kết logic. MICS hỗ trợ để MIH ngƣời dùng
điều khiển và quản lý hành vi liên kết liên
quan đến chuyển giao và tính di động. MIH
ngƣời dùng có thể sử dụng một số lệnh đƣợc
cung cấp bởi MICS để cấu hình, điều khiển
và lấy thông tin từ lớp vật lý và liên kết. MIIS
cho phép ngƣời dùng di động và nhà cung cấp
dịch vụ trao đổi thông tin các mạng truy nhập
ứng viên chuyển giao. Đặc biệt, MIIS hỗ trợ
MN thu đƣợc thông tin về các mạng có khả
năng chuyển giao từ kết nối mạng hiện tại. Ví
dụ, bằng cách yêu cầu MIIS, một MN đang
liên kết với một AP của WLAN có thể nhận
đƣợc thông tin về các mạng khác hiện diện
trong vùng phủ sóng, không chỉ các mạng
IEEE 802 mà cả các mạng 3GPP, 3GPP2.
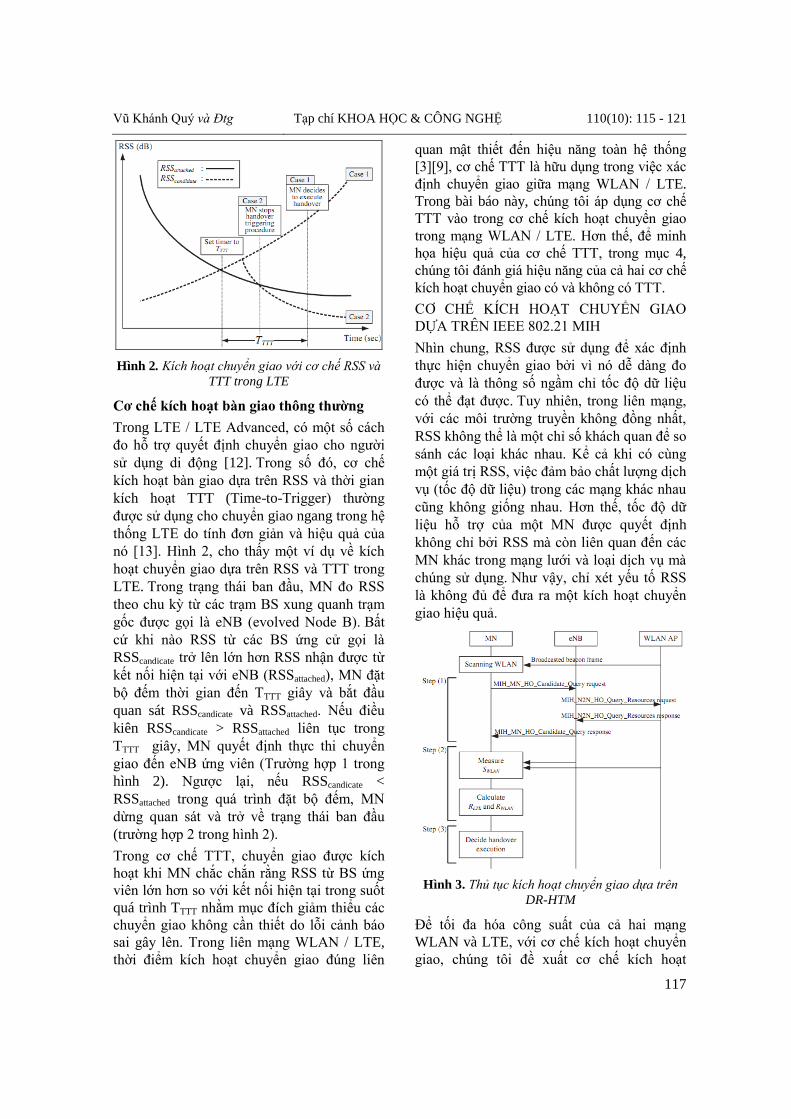
Vũ Khánh Quý và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 115 - 121
117
Hình 2. Kích hoạt chuyển giao với cơ chế RSS và
TTT trong LTE
Cơ chế kích hoạt bàn giao thông thƣờng
Trong LTE / LTE Advanced, có một số cách
đo hỗ trợ quyết định chuyển giao cho ngƣời
sử dụng di động [12]. Trong số đó, cơ chế
kích hoạt bàn giao dựa trên RSS và thời gian
kích hoạt TTT (Time-to-Trigger) thƣờng
đƣợc sử dụng cho chuyển giao ngang trong hệ
thống LTE do tính đơn giản và hiệu quả của
nó [13]. Hình 2, cho thấy một ví dụ về kích
hoạt chuyển giao dựa trên RSS và TTT trong
LTE. Trong trạng thái ban đầu, MN đo RSS
theo chu kỳ từ các trạm BS xung quanh trạm
gốc đƣợc gọi là eNB (evolved Node B). Bất
cứ khi nào RSS từ các BS ứng cử gọi là
RSScandicate trở lên lớn hơn RSS nhận đƣợc từ
kết nối hiện tại với eNB (RSSattached), MN đặt
bộ đếm thời gian đến TTTT giây và bắt đầu
quan sát RSScandicate và RSSattached. Nếu điều
kiên RSScandicate > RSSattached liên tục trong
TTTT giây, MN quyết định thực thi chuyển
giao đến eNB ứng viên (Trƣờng hợp 1 trong
hình 2). Ngƣợc lại, nếu RSScandicate <
RSSattached trong quá trình đặt bộ đếm, MN
dừng quan sát và trở về trạng thái ban đầu
(trƣờng hợp 2 trong hình 2).
Trong cơ chế TTT, chuyển giao đƣợc kích
hoạt khi MN chắc chắn rằng RSS từ BS ứng
viên lớn hơn so với kết nối hiện tại trong suốt
quá trình TTTT nhằm mục đích giảm thiểu các
chuyển giao không cần thiết do lỗi cảnh báo
sai gây lên. Trong liên mạng WLAN / LTE,
thời điểm kích hoạt chuyển giao đúng liên
quan mật thiết đến hiệu năng toàn hệ thống
[3][9], cơ chế TTT là hữu dụng trong việc xác
định chuyển giao giữa mạng WLAN / LTE.
Trong bài báo này, chúng tôi áp dụng cơ chế
TTT vào trong cơ chế kích hoạt chuyển giao
trong mạng WLAN / LTE. Hơn thế, để minh
họa hiệu quả của cơ chế TTT, trong mục 4,
chúng tôi đánh giá hiệu năng của cả hai cơ chế
kích hoạt chuyển giao có và không có TTT.
CƠ CHẾ KÍCH HOẠT CHUYỂN GIAO
DỰA TRÊN IEEE 802.21 MIH
Nhìn chung, RSS đƣợc sử dụng để xác định
thực hiện chuyển giao bởi vì nó dễ dàng đo
đƣợc và là thông số ngầm chỉ tốc độ dữ liệu
có thể đạt đƣợc. Tuy nhiên, trong liên mạng,
với các môi trƣờng truyền không đồng nhất,
RSS không thể là một chỉ số khách quan để so
sánh các loại khác nhau. Kể cả khi có cùng
một giá trị RSS, việc đảm bảo chất lƣợng dịch
vụ (tốc độ dữ liệu) trong các mạng khác nhau
cũng không giống nhau. Hơn thế, tốc độ dữ
liệu hỗ trợ của một MN đƣợc quyết định
không chỉ bởi RSS mà còn liên quan đến các
MN khác trong mạng lƣới và loại dịch vụ mà
chúng sử dụng. Nhƣ vậy, chỉ xét yếu tố RSS
là không đủ để đƣa ra một kích hoạt chuyển
giao hiệu quả.
Hình 3. Thủ tục kích hoạt chuyển giao dựa trên
DR-HTM
Để tối đa hóa công suất của cả hai mạng
WLAN và LTE, với cơ chế kích hoạt chuyển
giao, chúng tôi đề xuất cơ chế kích hoạt
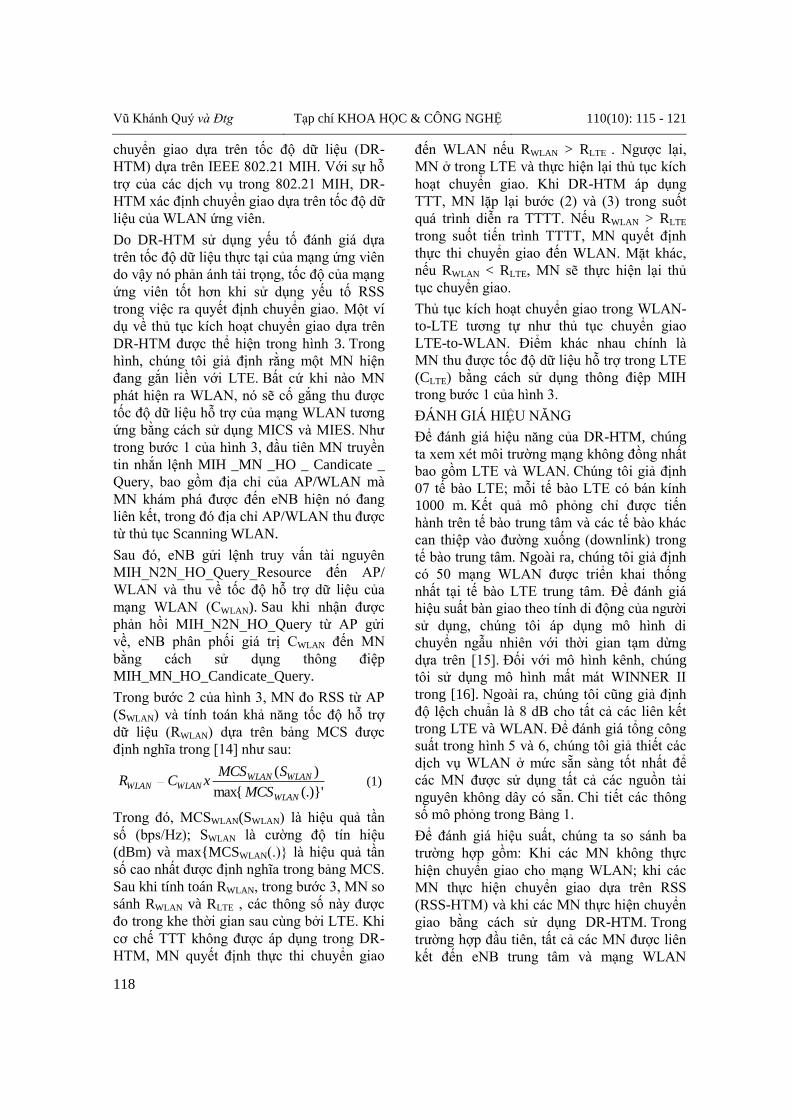
Vũ Khánh Quý và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 115 - 121
118
chuyển giao dựa trên tốc độ dữ liệu (DR-
HTM) dựa trên IEEE 802.21 MIH. Với sự hỗ
trợ của các dịch vụ trong 802.21 MIH, DR-
HTM xác định chuyển giao dựa trên tốc độ dữ
liệu của WLAN ứng viên.
Do DR-HTM sử dụng yếu tố đánh giá dựa
trên tốc độ dữ liệu thực tại của mạng ứng viên
do vậy nó phản ánh tải trọng, tốc độ của mạng
ứng viên tốt hơn khi sử dụng yếu tố RSS
trong việc ra quyết định chuyển giao. Một ví
dụ về thủ tục kích hoạt chuyển giao dựa trên
DR-HTM đƣợc thể hiện trong hình 3. Trong
hình, chúng tôi giả định rằng một MN hiện
đang gắn liền với LTE. Bất cứ khi nào MN
phát hiện ra WLAN, nó sẽ cố gắng thu đƣợc
tốc độ dữ liệu hỗ trợ của mạng WLAN tƣơng
ứng bằng cách sử dụng MICS và MIES. Nhƣ
trong bƣớc 1 của hình 3, đầu tiên MN truyền
tin nhắn lệnh MIH _MN _HO _ Candicate _
Query, bao gồm địa chỉ của AP/WLAN mà
MN khám phá đƣợc đến eNB hiện nó đang
liên kết, trong đó địa chỉ AP/WLAN thu đƣợc
từ thủ tục Scanning WLAN.
Sau đó, eNB gửi lệnh truy vấn tài nguyên
MIH_N2N_HO_Query_Resource đến AP/
WLAN và thu về tốc độ hỗ trợ dữ liệu của
mạng WLAN (CWLAN). Sau khi nhận đƣợc
phản hồi MIH_N2N_HO_Query từ AP gửi
về, eNB phân phối giá trị CWLAN đến MN
bằng cách sử dụng thông điệp
MIH_MN_HO_Candicate_Query.
Trong bƣớc 2 của hình 3, MN đo RSS từ AP
(SWLAN) và tính toán khả năng tốc độ hỗ trợ
dữ liệu (RWLAN) dựa trên bảng MCS đƣợc
định nghĩa trong [14] nhƣ sau:
(.)}'max{
)(
WLAN
WLANWLANWLANWLAN
MCS
SMCSxCR (1)
Trong đó, MCSWLAN(SWLAN) là hiệu quả tần
số (bps/Hz); SWLAN là cƣờng độ tín hiệu
(dBm) và max{MCSWLAN(.)} là hiệu quả tần
số cao nhất đƣợc định nghĩa trong bảng MCS.
Sau khi tính toán RWLAN, trong bƣớc 3, MN so
sánh RWLAN và RLTE , các thông số này đƣợc
đo trong khe thời gian sau cùng bởi LTE. Khi
cơ chế TTT không đƣợc áp dụng trong DR-
HTM, MN quyết định thực thi chuyển giao
đến WLAN nếu RWLAN > RLTE . Ngƣợc lại,
MN ở trong LTE và thực hiện lại thủ tục kích
hoạt chuyển giao. Khi DR-HTM áp dụng
TTT, MN lặp lại bƣớc (2) và (3) trong suốt
quá trình diễn ra TTTT. Nếu RWLAN > RLTE
trong suốt tiến trình TTTT, MN quyết định
thực thi chuyển giao đến WLAN. Mặt khác,
nếu RWLAN < RLTE, MN sẽ thực hiện lại thủ
tục chuyển giao.
Thủ tục kích hoạt chuyển giao trong WLAN-
to-LTE tƣơng tự nhƣ thủ tục chuyển giao
LTE-to-WLAN. Điểm khác nhau chính là
MN thu đƣợc tốc độ dữ liệu hỗ trợ trong LTE
(CLTE) bằng cách sử dụng thông điệp MIH
trong bƣớc 1 của hình 3.
ĐÁNH GIÁ HIỆU NĂNG
Để đánh giá hiệu năng của DR-HTM, chúng
ta xem xét môi trƣờng mạng không đồng nhất
bao gồm LTE và WLAN. Chúng tôi giả định
07 tế bào LTE; mỗi tế bào LTE có bán kính
1000 m. Kết quả mô phỏng chỉ đƣợc tiến
hành trên tế bào trung tâm và các tế bào khác
can thiệp vào đƣờng xuống (downlink) trong
tế bào trung tâm. Ngoài ra, chúng tôi giả định
có 50 mạng WLAN đƣợc triển khai thống
nhất tại tế bào LTE trung tâm. Để đánh giá
hiệu suất bàn giao theo tính di động của ngƣời
sử dụng, chúng tôi áp dụng mô hình di
chuyển ngẫu nhiên với thời gian tạm dừng
dựa trên [15]. Đối với mô hình kênh, chúng
tôi sử dụng mô hình mất mát WINNER II
trong [16]. Ngoài ra, chúng tôi cũng giả định
độ lệch chuẩn là 8 dB cho tất cả các liên kết
trong LTE và WLAN. Để đánh giá tổng công
suất trong hình 5 và 6, chúng tôi giả thiết các
dịch vụ WLAN ở mức sẵn sàng tốt nhất để
các MN đƣợc sử dụng tất cả các nguồn tài
nguyên không dây có sẵn. Chi tiết các thông
số mô phỏng trong Bảng 1.
Để đánh giá hiệu suất, chúng ta so sánh ba
trƣờng hợp gồm: Khi các MN không thực
hiện chuyển giao cho mạng WLAN; khi các
MN thực hiện chuyển giao dựa trên RSS
(RSS-HTM) và khi các MN thực hiện chuyển
giao bằng cách sử dụng DR-HTM. Trong
trƣờng hợp đầu tiên, tất cả các MN đƣợc liên
kết đến eNB trung tâm và mạng WLAN
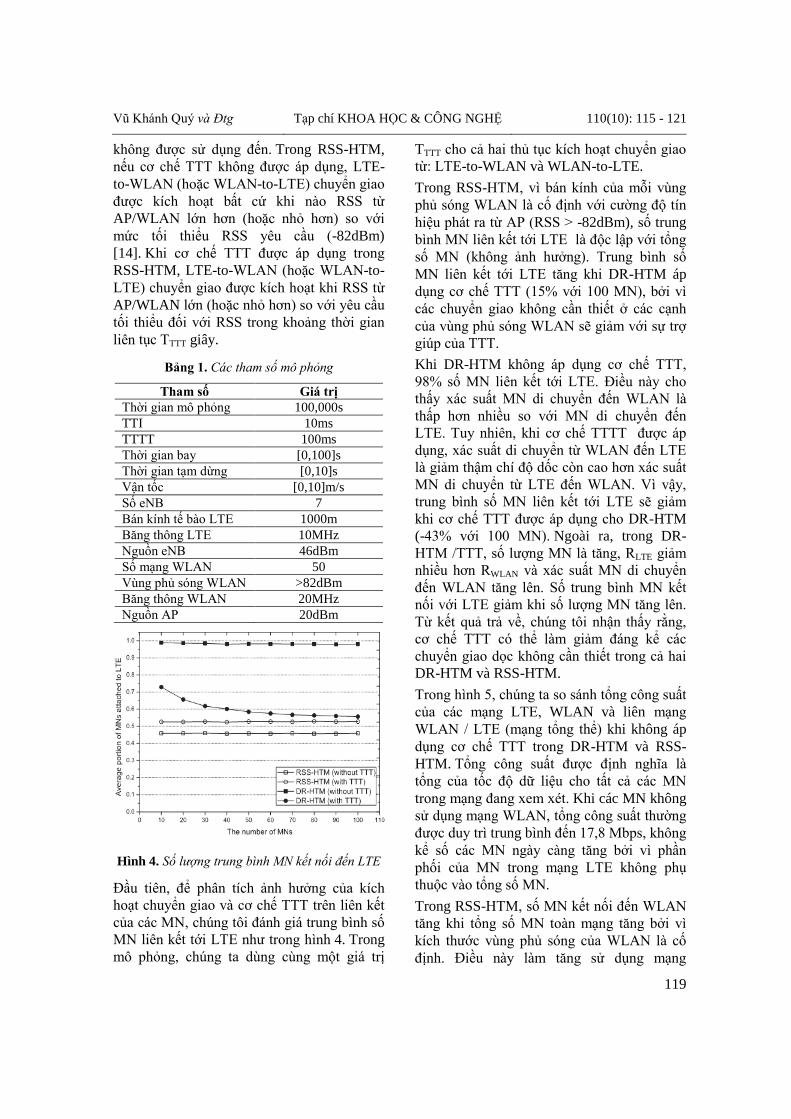
Vũ Khánh Quý và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 115 - 121
119
không đƣợc sử dụng đến. Trong RSS-HTM,
nếu cơ chế TTT không đƣợc áp dụng, LTE-
to-WLAN (hoặc WLAN-to-LTE) chuyển giao
đƣợc kích hoạt bất cứ khi nào RSS từ
AP/WLAN lớn hơn (hoặc nhỏ hơn) so với
mức tối thiểu RSS yêu cầu (-82dBm)
[14]. Khi cơ chế TTT đƣợc áp dụng trong
RSS-HTM, LTE-to-WLAN (hoặc WLAN-to-
LTE) chuyển giao đƣợc kích hoạt khi RSS từ
AP/WLAN lớn (hoặc nhỏ hơn) so với yêu cầu
tối thiểu đối với RSS trong khoảng thời gian
liên tục TTTT giây.
Bảng 1. Các tham số mô phỏng
Tham số Giá trị
Thời gian mô phỏng 100,000s
TTI 10ms
TTTT 100ms
Thời gian bay [0,100]s
Thời gian tạm dừng [0,10]s
Vận tốc [0,10]m/s
Số eNB 7
Bán kính tế bào LTE 1000m
Băng thông LTE 10MHz
Nguồn eNB 46dBm
Số mạng WLAN 50
Vùng phủ sóng WLAN >82dBm
Băng thông WLAN 20MHz
Nguồn AP 20dBm
Hình 4. Số lượng trung bình MN kết nối đến LTE
Đầu tiên, để phân tích ảnh hƣởng của kích
hoạt chuyển giao và cơ chế TTT trên liên kết
của các MN, chúng tôi đánh giá trung bình số
MN liên kết tới LTE nhƣ trong hình 4. Trong
mô phỏng, chúng ta dùng cùng một giá trị
TTTT cho cả hai thủ tục kích hoạt chuyển giao
từ: LTE-to-WLAN và WLAN-to-LTE.
Trong RSS-HTM, vì bán kính của mỗi vùng
phủ sóng WLAN là cố định với cƣờng độ tín
hiệu phát ra từ AP (RSS > -82dBm), số trung
bình MN liên kết tới LTE là độc lập với tổng
số MN (không ảnh hƣởng). Trung bình số
MN liên kết tới LTE tăng khi DR-HTM áp
dụng cơ chế TTT (15% với 100 MN), bởi vì
các chuyển giao không cần thiết ở các cạnh
của vùng phủ sóng WLAN sẽ giảm với sự trợ
giúp của TTT.
Khi DR-HTM không áp dụng cơ chế TTT,
98% số MN liên kết tới LTE. Điều này cho
thấy xác suất MN di chuyển đến WLAN là
thấp hơn nhiều so với MN di chuyển đến
LTE. Tuy nhiên, khi cơ chế TTTT đƣợc áp
dụng, xác suất di chuyển từ WLAN đến LTE
là giảm thậm chí độ dốc còn cao hơn xác suất
MN di chuyển từ LTE đến WLAN. Vì vậy,
trung bình số MN liên kết tới LTE sẽ giảm
khi cơ chế TTT đƣợc áp dụng cho DR-HTM
(-43% với 100 MN). Ngoài ra, trong DR-
HTM /TTT, số lƣợng MN là tăng, RLTE giảm
nhiều hơn RWLAN và xác suất MN di chuyển
đến WLAN tăng lên. Số trung bình MN kết
nối với LTE giảm khi số lƣợng MN tăng lên.
Từ kết quả trả về, chúng tôi nhận thấy rằng,
cơ chế TTT có thể làm giảm đáng kể các
chuyển giao dọc không cần thiết trong cả hai
DR-HTM và RSS-HTM.
Trong hình 5, chúng ta so sánh tổng công suất
của các mạng LTE, WLAN và liên mạng
WLAN / LTE (mạng tổng thể) khi không áp
dụng cơ chế TTT trong DR-HTM và RSS-
HTM. Tổng công suất đƣợc định nghĩa là
tổng của tốc độ dữ liệu cho tất cả các MN
trong mạng đang xem xét. Khi các MN không
sử dụng mạng WLAN, tổng công suất thƣờng
đƣợc duy trì trung bình đến 17,8 Mbps, không
kể số các MN ngày càng tăng bởi vì phần
phối của MN trong mạng LTE không phụ
thuộc vào tổng số MN.
Trong RSS-HTM, số MN kết nối đến WLAN
tăng khi tổng số MN toàn mạng tăng bởi vì
kích thƣớc vùng phủ sóng của WLAN là cố
định. Điều này làm tăng sử dụng mạng
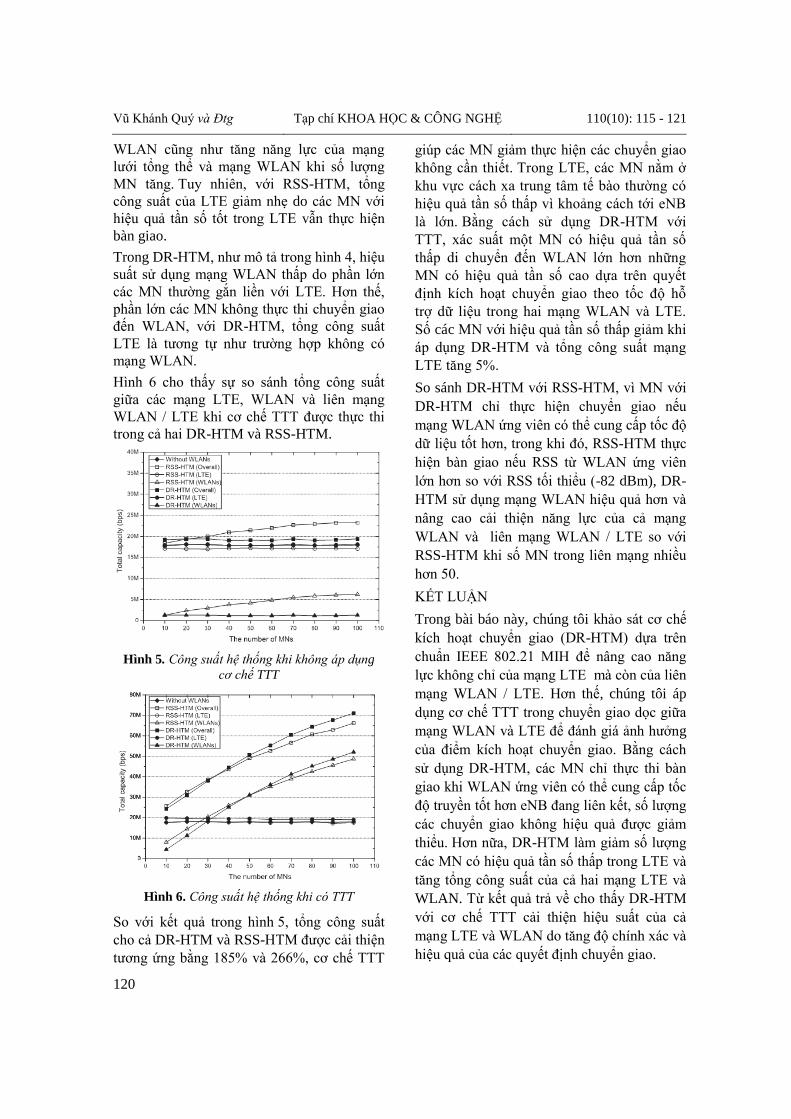
Vũ Khánh Quý và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 115 - 121
120
WLAN cũng nhƣ tăng năng lực của mạng
lƣới tổng thể và mạng WLAN khi số lƣợng
MN tăng. Tuy nhiên, với RSS-HTM, tổng
công suất của LTE giảm nhẹ do các MN với
hiệu quả tần số tốt trong LTE vẫn thực hiện
bàn giao.
Trong DR-HTM, nhƣ mô tả trong hình 4, hiệu
suất sử dụng mạng WLAN thấp do phần lớn
các MN thƣờng gắn liền với LTE. Hơn thế,
phần lớn các MN không thực thi chuyển giao
đến WLAN, với DR-HTM, tổng công suất
LTE là tƣơng tự nhƣ trƣờng hợp không có
mạng WLAN.
Hình 6 cho thấy sự so sánh tổng công suất
giữa các mạng LTE, WLAN và liên mạng
WLAN / LTE khi cơ chế TTT đƣợc thực thi
trong cả hai DR-HTM và RSS-HTM.
Hình 5. Công suất hệ thống khi không áp dụng
cơ chế TTT
Hình 6. Công suất hệ thống khi có TTT
So với kết quả trong hình 5, tổng công suất
cho cả DR-HTM và RSS-HTM đƣợc cải thiện
tƣơng ứng bằng 185% và 266%, cơ chế TTT
giúp các MN giảm thực hiện các chuyển giao
không cần thiết. Trong LTE, các MN nằm ở
khu vực cách xa trung tâm tế bào thƣờng có
hiệu quả tần số thấp vì khoảng cách tới eNB
là lớn. Bằng cách sử dụng DR-HTM với
TTT, xác suất một MN có hiệu quả tần số
thấp di chuyển đến WLAN lớn hơn những
MN có hiệu quả tần số cao dựa trên quyết
định kích hoạt chuyển giao theo tốc độ hỗ
trợ dữ liệu trong hai mạng WLAN và LTE.
Số các MN với hiệu quả tần số thấp giảm khi
áp dụng DR-HTM và tổng công suất mạng
LTE tăng 5%.
So sánh DR-HTM với RSS-HTM, vì MN với
DR-HTM chỉ thực hiện chuyển giao nếu
mạng WLAN ứng viên có thể cung cấp tốc độ
dữ liệu tốt hơn, trong khi đó, RSS-HTM thực
hiện bàn giao nếu RSS từ WLAN ứng viên
lớn hơn so với RSS tối thiểu (-82 dBm), DR-
HTM sử dụng mạng WLAN hiệu quả hơn và
nâng cao cải thiện năng lực của cả mạng
WLAN và liên mạng WLAN / LTE so với
RSS-HTM khi số MN trong liên mạng nhiều
hơn 50.
KẾT LUẬN
Trong bài báo này, chúng tôi khảo sát cơ chế
kích hoạt chuyển giao (DR-HTM) dựa trên
chuẩn IEEE 802.21 MIH để nâng cao năng
lực không chỉ của mạng LTE mà còn của liên
mạng WLAN / LTE. Hơn thế, chúng tôi áp
dụng cơ chế TTT trong chuyển giao dọc giữa
mạng WLAN và LTE để đánh giá ảnh hƣởng
của điểm kích hoạt chuyển giao. Bằng cách
sử dụng DR-HTM, các MN chỉ thực thi bàn
giao khi WLAN ứng viên có thể cung cấp tốc
độ truyền tốt hơn eNB đang liên kết, số lƣợng
các chuyển giao không hiệu quả đƣợc giảm
thiểu. Hơn nữa, DR-HTM làm giảm số lƣợng
các MN có hiệu quả tần số thấp trong LTE và
tăng tổng công suất của cả hai mạng LTE và
WLAN. Từ kết quả trả về cho thấy DR-HTM
với cơ chế TTT cải thiện hiệu suất của cả
mạng LTE và WLAN do tăng độ chính xác và
hiệu quả của các quyết định chuyển giao.
Vũ Khánh Quý và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 115 - 121
121
TÀI LIỆU THAM KHẢO
[1].Nielsel VN & Bƣu điện Việt Nam, “Báo cáo
khảo sát mức độ hài lòng của người dùng 3G tại
Việt Nam năm 2012”, Công bố ngày 9/5/2013.
[2].M. Bernaschi, F. Cacace, G. Iannello, S. Za,
and A. Pescape, “Seamless Internetworking of
WLANs and Cellular Networks: Architecture and
Performance Issues in a Mobile IPv6 Scenario”,
IEEE Wireless Communications, vol. 12, no. 3,
pp. 73-80, Jun. 2005.
[3].M. Smadi, V. S. Azhari, T. D. Todd, and V.
Kezys, “A Study of WLAN-to-Cellular Handover
Using Measured Building-Exit Data”, IEEE
Transaction on Vehicular Technology, vol. 58, no.
4, pp. 2044-2054, May 2009.
[4].M. Anas, F.D. Calabrese, P.E. Mogensen, C.
Rosa, and K.I. Pedersen, “Performance
Evaluation of Received Signal Strength Based
Hard Handover for LTE”, The 65th IEEE
Vehicular Technology Conference-Spring (VTC-
Spring) 2007, pp. 1046-1050, April 2007.
[5].M. Anas, F.D. Calabrese, P.-E. Ostling, K.I.
Pedersen, and P.E. Mogensen, “Performance
Analysis of Handover Measurements and Layer 3
Filtering for UTRAN LTE”, The 16th IEEE
International Symposium on Personal, Indoor and
Mobile Radio Communications (PIMRC’07), pp.
1-5, Sept. 2007.
[6].D. Aziz and R. Sigle, “Improvement of LTE
Handover Performance through Interference
Coordination”, IEEE 69th Vehicular Technology
Conference, pp. 1-5, April 2009
SUMMARY
HANDOVER IN LTE / WLAN INTERNETWORK BASED
ON IEEE 802.21 PROTOCOL
Vu Khanh Quy
1,*, Nguyen Chien Trinh
2, Ho Khanh Lam
1
1Hung Yen University of Technology and Education 2Post & Telecommunications Institute of Technology
The multimedia services over mobile communication system requires speed and bandwidth is
growing. This became important issues in mobile networks. To reduce the load and increase the
overall capacity of cellular networks, the handover in WLAN / Cellular consideration. However, in
the inter-network WLAN / Cellular, overall system performance is closely related to the latency of
the vertical handover process between the two networks. A trigger mechanism for handover
between the two networks to reduce the latency of the handover process, thereby increasing overall
system efficiency are issues that need to be studied. In this paper, we propose a trigger mechanism
for handover between the two networks (DR-HTM) based on independent standard handover
environmentally IEEE 802.21 MIH (IEEE 802.21 Media Independent Handover) to optimize
capacity both WLAN and Cellular networks. In DR-HTM, whenever a mobile node detects a
WLAN, it checks the data rate of WLAN using remote MIH services. Based on the information,
the mobile node decisions implement vertical handover. To evaluate the performance of DR-HTM,
we have done simulations trigger mechanism for handover based on the data rate and RSS. From
the results, we can see loads of Cellular networks are shared with WLAN and overall network
capacity is optimized using DR-HTM.
Keywords: WLAN, LTE, Vertical Handover.
Ngày nhận bài: 14/9/2013; Ngày phản biện: 27/9/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: TS. Vũ Đức Thái – Trường ĐH CNTT&TT – ĐHTN
* Email: [email protected]

Vũ Khánh Quý và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 115 - 121
122

Vũ Xuân Nam và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 123 - 129
123
ỨNG DỤNG PHÉP PHÂN TÍCH HỒI QUY ĐA BIẾN TRONG KIỂM ĐỊNH
YẾU TỐ QUYẾT ĐỊNH HÀNH VI CHIA SẺ TRI THỨC CỦA NGƢỜI
LAO ĐỘNG TRONG DOANH NGHIỆP VIỆT NAM
Vũ Xuân Nam
1,*, Nguyễn Văn Huân
1, Trƣơng Văn Tú
2
1Trường ĐH Công nghệ thông tin và Truyền thông – ĐH Thái Nguyên 2Viện Công nghệ thông tin Kinh tế – ĐH Kinh tế Quốc dân
TÓM TẮT Quản trị thi thức là chủ đề đƣợc nhiều học giả quan tâm và đầu tƣ công sức nghiên cứu từ rất lâu.
Tại Việt Nam, chủ đề này vẫn còn khá mới mẻ và còn rất ít các công trình nghiên cứu. Trong thực
tế, các doanh nghiệp Việt Nam cũng rất quan tâm tới việc chia sẻ tri thức, kinh nghiệm làm việc
của ngƣời lao động nhằm tạo ƣu thế cạnh tranh, phát triển bền vững cho doanh nghiệp.
Bài báo đề xuất việc ứng dụng lý thuyết hành vi hoạch định để nghiên cứu các yếu tố quyết định
tới hành vi chia sẻ tri thức của ngƣời lao động trong doanh nghiệp Việt Nam. Bài báo ứng dụng
phép phân tích hồi quy đa biến để kiểm tra tính đúng đắn của các biến, mô hình nghiên cứu.
Từ khóa: Tri thức, quản lý tri thức, mô hình, chia sẻ, hành vi.
GIỚI THIỆU*
Sự phát triển của một doanh nghiệp ngoài cơ
sở vật chất, vốn đầu tƣ,… còn phụ thuộc vào
một yếu tố quan trọng, đó là tri thức của đội
ngũ cán bộ, nhân viên. Quản lý tri thức là quá
trình nhận biết, chia sẻ, sử dụng và thực hành
tri thức bên trong tổ chức (Ikujiro Nonaka &
etc, 2008)[11]. Do đó, quản lý tri thức là một
trong những vấn đề có tính chất quyết định
cho sự phát triển của một doanh nghiệp. Một
nội dung quan trọng của quản lý tri thức là
làm thế nào để việc chia sẻ tri thức có thể tạo
ra những lợi ích gia tăng cho tổ chức
(Liebowitz,2001)[12], biến tri thức cá nhân
thành tri thức của tổ chức (Grant, 1996)[7].
Tuy nhiên, việc chia sẻ tri thức của một cá
nhân không phải dễ dàng thực hiện
(Davenport & Prusak, 1988) khi mà tri thức
đó có giá trị quan trọng (Ryu & etc,.
2003)[16] và là tài sản của một cá nhân nào
đó. Thách thức lớn nhất trong quản lý tri thức
là làm thế nào để các cá nhân có thể chia sẻ tri
thức cho nhau (Ruggles, 1998)[15]. Nghiên
cứu này sẽ tập trung nghiên cứu yếu tố ảnh
hƣởng tới hành vi chia sẻ tri thức của cá nhân
trong tổ chức, cụ thể là hành vi chia sẻ tri
thức của ngƣời lao động trong các doanh
* Tel: 0943299688; Email: [email protected]
nghiệp Việt Nam. Những phát hiện hỗ trợ tuy
nhỏ bé nhƣng là khối phát triển bằng chứng
cho thấy các yếu tố động cơ và phần thƣởng
không phải là những yếu tố có ảnh hƣởng
chính đến việc chia sẻ tri thức (Bock & Kim,
2002 )[3].
Các nghiên cứu về hành vi chia sẻ tri thức đã
đƣợc thực hiện khá nhiều với các cách tiếp
cận khác nhau. Lý thuyết hành động hợp lý
(TRA) và lý thuyết hành vi hoạch định (TPB)
chứng tỏ có kết quả khá tốt trong việc dự báo
các hành vi khác nhau của con ngƣời
(Sheppard & etc.,1988)[17], nhƣng còn ít
đƣợc ứng dụng trong các nghiên cứu về hành
vi chia sr tri thức của cá nhân trong nhiều lĩnh
vực chuyên môn (Ryu & etc.,2003)[16]. Đặc
biệt trong các doanh nghiệp Việt Nam, tri
thức của ngƣời lao động không chỉ là những
gì đã học ở trƣờng lớp mà là một quá trình
tích lũy thông qua hoạt động thực tiễn của
doanh nghiệp và qua học hỏi từ đồng nghiệp.
Tri thức và kinh nghiệm làm việc của mỗi
ngƣời lao động đƣợc tích lũy không những
góp phần tăng hiệu quả hoạt động mà còn góp
phần tạo ƣu thế cạnh tranh, phát triển bền
vững cho doanh nghiệp. Nếu lãnh đạo doanh
nghiệp nhận biết các tác động tới hành vi chia
sẻ tri thức của ngƣời lao động và tạo điều kiện
cho chúng đƣợc phát huy, doanh nghiệp sẽ có
đƣợc đội ngũ nhân viên giỏi, giàu kinh

Vũ Xuân Nam và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 123 - 129
124
nghiệm qua đó phát huy ƣu thế cạnh tranh và
tạo sự phát triển bền vững cho doanh nghiệp.
Xuất phát từ vấn đề kể trên, bài báo đề cập tới
phƣơng pháp phân tích nhân tố và mô hình
hồi quy đa biến, sử dụng lý thuyết hành vi
hoạch địch (TPB) để xác định mức đố ảnh
hƣởng của ba yếu tố: Thái độ đối với chia sẻ
tri thức, chuẩn chủ quan (Ảnh hƣởng đồng
nghiệp và ảnh hƣởng lãnh đạo), và kiểm soát
hành vi chia sẻ tri thức lên yếu tố chia sẻ tri
thức của ngƣời lao động trong doanh nghiệp
Việt Nam.
CƠ SỞ LÝ THUYẾT VÀ MÔ HÌNH
NGHIÊN CỨU
Lý thuyết hành vi hoạch định TPB
Lý thuyết hành vi hoạch định (Theory of
planned behavior – TPB) là một trong những
lý thuyết có tầm ảnh hƣởng rộng đƣợc sử
dụng trong các nghiên cứu về hành vi của con
ngƣời (Hung & etc., 2010)[10]. Lý thyết này
đƣợc Ajen (1991)[1,2] phát triển từ lý thuyết
hành động hợp lý (Theory of reasoned action
– TRA), cho rằng hành động thực tế của con
ngƣời chịu ảnh hƣởng bởi ý định thực hiện
hành vi đó (Fishbein & Ajen, 1975) [1,2], khi
thêm yếu tố Kiểm soát hành vi. Lý thuyết
này giả định rằng, một hành vi có thể đƣợc dự
báo hoặc giải thích bởi ý định thực hiện hành
vi đó và đƣợc ứng dụng trong nhiều lĩnh vực
nghiên cứu khác nhau (Ryu & etc., 2003;
Bock & Kim, 2002) [3, 16].
Theo lý thuyết TPB, trong bài báo này, ý định
chia sẻ tri thức, là mức độ mà ngƣời lao động
tin rằng họ sẽ tham gia vào việc chia sẻ tri
thức (Ryu & etc.,2003) [16], chịu ảnh hƣởng
bởi ba yếu tố: Chuẩn chủ quan, Thái độ với
việc chia sẻ tri thức và Kiểm soát hành vi chia
sẻ tri thức. Thái độ đối với việc chia sẻ tri
thức là mức độ mà mỗi nhân viên đánh giá là
có ích hay khống đối với việc chia sẻ tri thức
(Ryu & etc., 2003) [16]. Chuẩn chủ quan của
việc chia sẻ tri thức sẽ gồm hai yếu tố, ảnh
hƣởng của lãnh đạo doanh nghiệp và ảnh
hƣởng của đồng nghiệp với việc chía sẻ tri
thức của họ. Cuối cùng, Kiểm soát hành vi
chia sẻ tri thức là nhận thức tính dễ hay khó
của ngƣời lao động về khả năng kiểm soát của
họ trong việc chia sẻ kiến thức (Ajzen,
1991,2001; Dong, 2010)[1,2,4]. Từ đó, giả
thiết của bài báo đƣợc thể hiện trên hình 1.
H1: Thái độ đối với việc chia sẻ tri thức có tác động dương lên Ý nghĩa chia sẻ tri thức của người lao động.
H2: Thái độ đối với chia sẻ tri thức
H3: Kiểm soát hành vi chia sẻ tri thức có tác động dương lên Ý định chia sẻ tri thức của người lao động.
H4a: Ảnh hưởng của đồng nghiệp có tác động dương lên Ý định chia sẻ tri thức của người lao động.
H4b: Ảnh hưởng của lãnh đạo có tác động dương lên Ý định chia sẻ tri thức của người lao động.
Hình 1. Mô hình nghiên cứu
H4
H3
H2
H1
Ý định chia sẻ tri thức
Thái độ đối với chia sẻ tri thức
Kiểm soát hành vi chia sẻ tri thức
Chuẩn chủ quan về chia sẻ tri thức:
- Đồng nghiệp
- Lãnh đạo
Mức độ hài lòng với doanh nghiệp
Hành vi chia sẻ tri thức
H0
Vũ Xuân Nam và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 123 - 129
125
PHƢƠNG PHÁP NGHIÊN CỨU
Dựa trên khái niệm của Ajzen (2001), Bock
& Kim (2002), Fishbein & Ajzen (1975)
[2,3,5,6], thang đo cho các biến của mô hình
đƣợc kế thừa từ nghiên cứu của Ryu & etc
(2003) [16], trong đó yếu tố Mức độ hài lòng
đối với doanh nghiệp (4 biến quan sát), Thái
độ ( 5 biến quan sát), Kiểm soát hành vi đối
với chia sẻ tri thức ( 3 biến quan sát), Ảnh
hƣởng của đồng nghiệp ( 4 biến quan sát),
Ảnh hƣởng của lãnh đạo ( 4 biến quan sát).
Thông qua thảo luận nhóm với ngƣời lao
động, thang đo đƣợc hiệu chỉnh và bổ sung
cho phù hợp với bối cảnh nghiên cứu. Cuối
cùng, phiếu khảo sát gồm 20 biến quan sát, sử
dụng thang đo Likert năm điểm ( từ 1: Hoàn
toàn không đồng ý đến 5: Hoàn toàn đồng ý)
đƣợc hình thành. Sau đó, Phiếu khảo sát đƣợc
sử dụng phỏng vấn thử với 20 ngƣời lao động
để kiểm tra ngữ nghĩa trƣớc khi thực hiện
khảo sát chính thức.
Phiếu khảo sát đƣợc gửi qua đƣờng bƣu điện,
e-mail, phỏng vấn trực tiếp tới 250 ngƣời lao
động của 30 doanh nghiệp trên địa bàn Thái
Nguyên, Hà Nội, Bắc Giang. Thời gian khảo
sát kéo dài 03 tháng ( tháng 03-06/2013). Một
số trƣờng hợp đƣợc trả lời ngay (qua e-mail,
trực tiếp), một số trƣờng hợp trả lời sau và
gửi lại thƣ qua đƣờng bƣu điện. Để nâng cao
tỷ lệ phản hồi, các trƣờng hợp gửi phiếu khảo
sát qua đƣờng bƣu điện đƣợc gọi điện thoại
báo và nhờ họ quan tâm. Kết quả thu về 186
phiếu khảo sát, trong đó 20 phiếu bị loại vì trả
lời thiếu thông tin. Trong 166 ngƣời trả lời
thông tin, có 136 ngƣời là cán bộ, nhân viên;
30 ngƣời giữ chức vụ quản lý. Các yếu tố
khác về đối tƣợng khảo sát đƣợc tình bày ở
Bảng 1.
Từ dữ liệu thu thập đƣợc, tác giả tiến hành
phân tích nhân tố bằng việc đánh giá các
thang đo thông qua hệ số tin cậy Cronbach’s
Alpha và ứng dụng phƣơng pháp thống kê hồi
quy để kiểm định tính đúng của mô hình
nghiên cứu.
KẾT QUẢ
Kiểm định thang đo
Kết quả phân tích nhân tố cho các biến độc
lập gồm 33 biến quan sát đƣợc trình bày ở
Bảng 2. Theo đó, thang đo của 3 yếu tố Tin
tƣởng vào đồng nghiệp (giảm còn 2 biến quan
sát), Ảnh hƣởng đồng nghiệp (giảm còn 4
biến quan sát) và Kiểm soát hành vi chia sẻ tri
thức (giảm còn 3 biến quan sát). Các yếu tố
khác không có thay đổi về biến số quan sát.
Kết quả phân tích độ tin cậy cho thấy các
thang đo đều đạt yêu cầu với hệ số
Cronbach’s alpha >0.7 (Hair & etc., 1998)[8],
với các giá trị trong khoảng 0.716 đến 0.923.
Kế đến, thực hiện phân tích nhân tố cho yếu
tố Ý định chia sẻ tri thức với 4 biến quan sát.
Sử dụng phép trích Principal Component,
phép quay Varimax. Kết quả cho hệ số KMO
đạt yêu cầu (0.777), kiểm định Bartlett có
sig.=0.000 chứng tỏ dữ liệu phù hợp cho phân
tích này. Có một nhân tố đƣợc rút trích với
tổng phƣơng sai là 64.8%. Kết quả độ tin cậy
của biến phụ thuộc có hệ số Cronbach’s alpha
= 0.818 (>0.7) nên thang đo đạt yêu cầu (Hair
& etc., 1998) [8] và đƣợc sử dụng cho phân
tích tiếp theo.
Bảng 1. Mô tả mẫu khảo sát
Yếu tố Tỷ lệ (%) Yếu tố Tỷ lệ (%)
Giới tính Nơi công tác
Nam 52 Doanh nghiệp nhà nƣớc 22.6
Nữ 48 Doanh nghiệp tƣ nhân 77.4
Nhóm tuổi Thời gian công tác
Từ 22 đến 35 tuổi 35.4 Từ 1 đến 5 năm 28.3
Từ 36 tới 45 tuổi 33.4 Từ 6 đến 10 năm 38.1
Trên 45 tuổi 31.2 Trên 10 năm 33.6
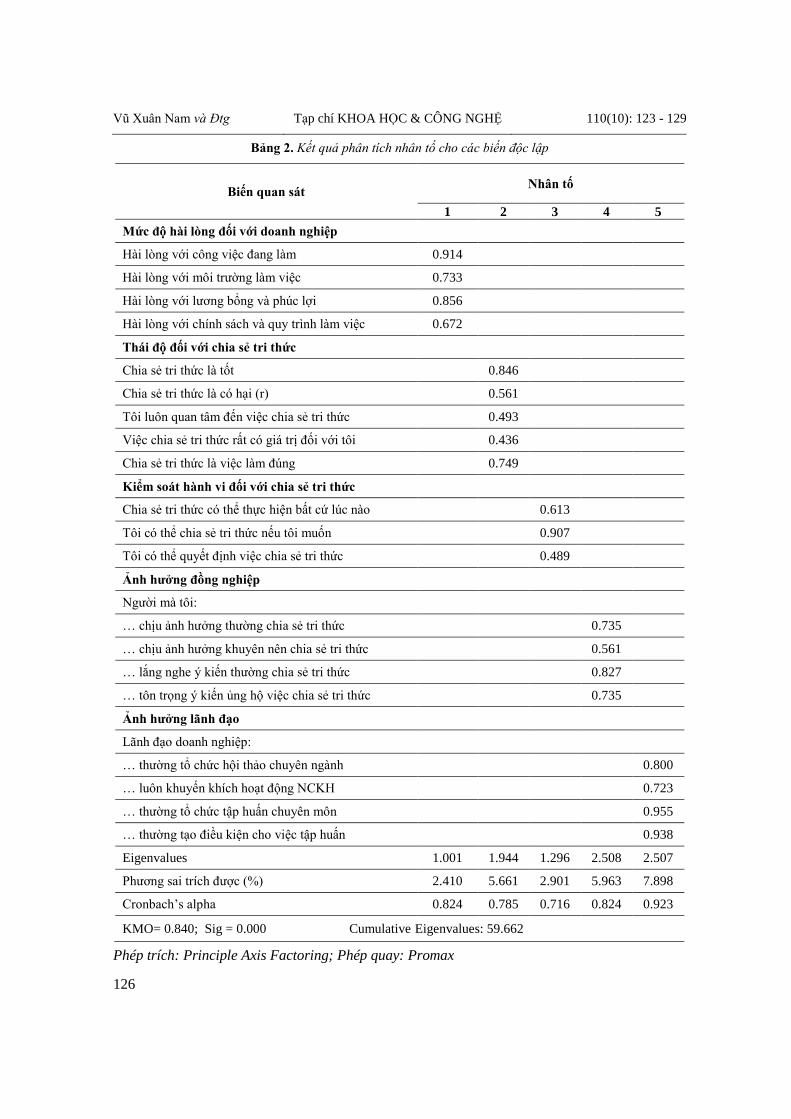
Vũ Xuân Nam và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 123 - 129
126
Bảng 2. Kết quả phân tích nhân tố cho các biến độc lập
Biến quan sát Nhân tố
1 2 3 4 5
Mức độ hài lòng đối với doanh nghiệp
Hài lòng với công việc đang làm 0.914
Hài lòng với môi trƣờng làm việc 0.733
Hài lòng với lƣơng bổng và phúc lợi 0.856
Hài lòng với chính sách và quy trình làm việc 0.672
Thái độ đối với chia sẻ tri thức
Chia sẻ tri thức là tốt 0.846
Chia sẻ tri thức là có hại (r) 0.561
Tôi luôn quan tâm đến việc chia sẻ tri thức 0.493
Việc chia sẻ tri thức rất có giá trị đối với tôi 0.436
Chia sẻ tri thức là việc làm đúng 0.749
Kiểm soát hành vi đối với chia sẻ tri thức
Chia sẻ tri thức có thể thực hiện bất cứ lúc nào 0.613
Tôi có thể chia sẻ tri thức nếu tôi muốn 0.907
Tôi có thể quyết định việc chia sẻ tri thức 0.489
Ảnh hƣởng đồng nghiệp
Ngƣời mà tôi:
… chịu ảnh hƣởng thƣờng chia sẻ tri thức 0.735
… chịu ảnh hƣởng khuyên nên chia sẻ tri thức 0.561
… lắng nghe ý kiến thƣờng chia sẻ tri thức 0.827
… tôn trọng ý kiến ủng hộ việc chia sẻ tri thức 0.735
Ảnh hƣởng lãnh đạo
Lãnh đạo doanh nghiệp:
… thƣờng tổ chức hội thảo chuyên ngành 0.800
… luôn khuyến khích hoạt động NCKH 0.723
… thƣờng tổ chức tập huấn chuyên môn 0.955
… thƣờng tạo điều kiện cho việc tập huấn 0.938
Eigenvalues 1.001 1.944 1.296 2.508 2.507
Phƣơng sai trích đƣợc (%) 2.410 5.661 2.901 5.963 7.898
Cronbach’s alpha 0.824 0.785 0.716 0.824 0.923
KMO= 0.840; Sig = 0.000 Cumulative Eigenvalues: 59.662
Phép trích: Principle Axis Factoring; Phép quay: Promax
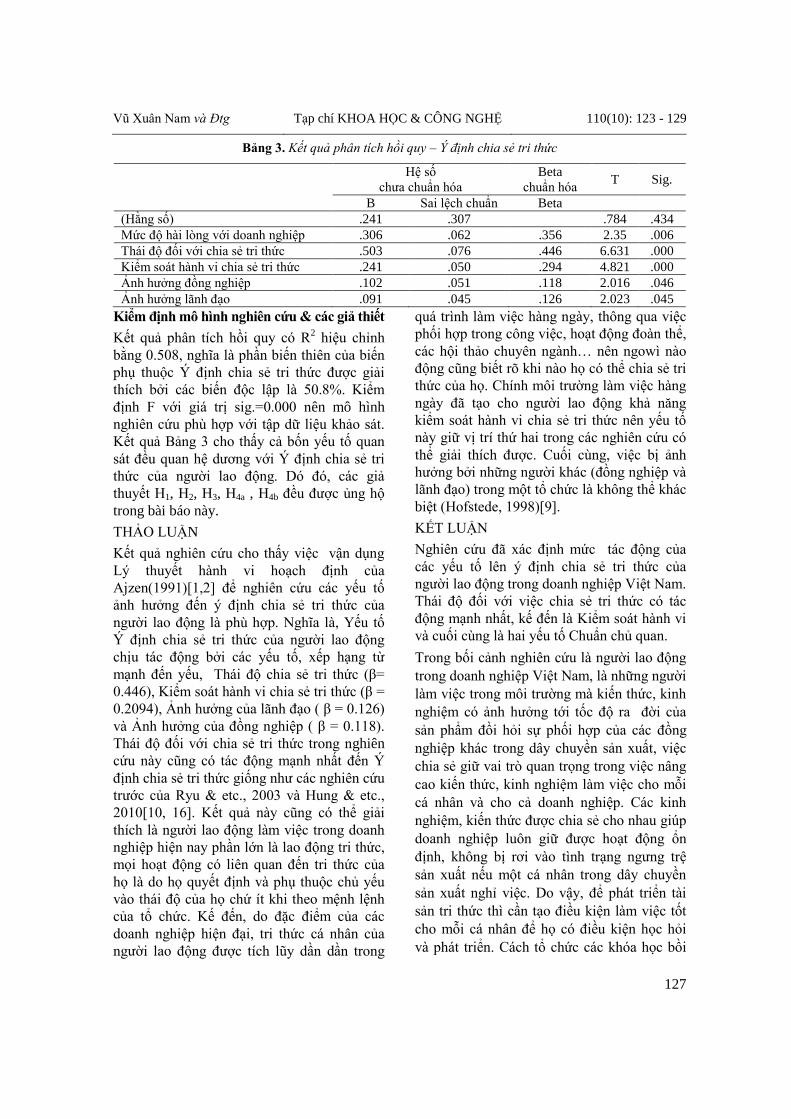
Vũ Xuân Nam và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 123 - 129
127
Bảng 3. Kết quả phân tích hồi quy – Ý định chia sẻ tri thức
Hệ số
chƣa chuẩn hóa
Beta
chuẩn hóa T Sig.
B Sai lệch chuẩn Beta
(Hằng số) .241 .307 .784 .434
Mức độ hài lòng với doanh nghiệp .306 .062 .356 2.35 .006
Thái độ đối với chia sẻ tri thức .503 .076 .446 6.631 .000
Kiểm soát hành vi chia sẻ tri thức .241 .050 .294 4.821 .000
Ảnh hƣởng đồng nghiệp .102 .051 .118 2.016 .046
Ảnh hƣởng lãnh đạo .091 .045 .126 2.023 .045
Kiểm định mô hình nghiên cứu & các giả thiết
Kết quả phân tích hồi quy có R2 hiệu chỉnh
bằng 0.508, nghĩa là phần biến thiên của biến
phụ thuộc Ý định chia sẻ tri thức đƣợc giải
thích bởi các biến độc lập là 50.8%. Kiểm
định F với giá trị sig.=0.000 nên mô hình
nghiên cứu phù hợp với tập dữ liệu khảo sát.
Kết quả Bảng 3 cho thấy cả bốn yếu tố quan
sát đều quan hệ dƣơng với Ý định chia sẻ tri
thức của ngƣời lao động. Dó đó, các giả
thuyết H1, H2, H3, H4a , H4b đều đƣợc ủng hộ
trong bài báo này.
THẢO LUẬN
Kết quả nghiên cứu cho thấy việc vận dụng
Lý thuyết hành vi hoạch định của
Ajzen(1991)[1,2] để nghiên cứu các yếu tố
ảnh hƣởng đến ý định chia sẻ tri thức của
ngƣời lao động là phù hợp. Nghĩa là, Yếu tố
Ý định chia sẻ tri thức của ngƣời lao động
chịu tác động bởi các yếu tố, xếp hạng từ
mạnh đến yếu, Thái độ chia sẻ tri thức (β=
0.446), Kiểm soát hành vi chia sẻ tri thức (β =
0.2094), Ảnh hƣởng của lãnh đạo ( β = 0.126)
và Ảnh hƣởng của đồng nghiệp ( β = 0.118).
Thái độ đối với chia sẻ tri thức trong nghiên
cứu này cũng có tác động mạnh nhất đến Ý
định chia sẻ tri thức giống nhƣ các nghiên cứu
trƣớc của Ryu & etc., 2003 và Hung & etc.,
2010[10, 16]. Kết quả này cũng có thể giải
thích là ngƣời lao động làm việc trong doanh
nghiệp hiện nay phần lớn là lao động tri thức,
mọi hoạt động có liên quan đến tri thức của
họ là do họ quyết định và phụ thuộc chủ yếu
vào thái độ của họ chứ ít khi theo mệnh lệnh
của tổ chức. Kế đến, do đặc điểm của các
doanh nghiệp hiện đại, tri thức cá nhân của
ngƣời lao động đƣợc tích lũy dần dần trong
quá trình làm việc hàng ngày, thông qua việc
phối hợp trong công việc, hoạt động đoàn thể,
các hội thảo chuyên ngành… nên ngowì nào
động cũng biết rõ khi nào họ có thể chia sẻ tri
thức của họ. Chính môi trƣờng làm việc hàng
ngày đã tạo cho ngƣời lao động khả năng
kiểm soát hành vi chia sẻ tri thức nên yếu tố
này giữ vị trí thứ hai trong các nghiên cứu có
thể giải thích đƣợc. Cuối cùng, việc bị ảnh
hƣởng bởi những ngƣời khác (đồng nghiệp và
lãnh đạo) trong một tổ chức là không thể khác
biệt (Hofstede, 1998)[9].
KẾT LUẬN
Nghiên cứu đã xác định mức tác động của
các yếu tố lên ý định chia sẻ tri thức của
ngƣời lao động trong doanh nghiệp Việt Nam.
Thái độ đối với việc chia sẻ tri thức có tác
động mạnh nhất, kế đến là Kiểm soát hành vi
và cuối cùng là hai yếu tố Chuẩn chủ quan.
Trong bối cảnh nghiên cứu là ngƣời lao động
trong doanh nghiệp Việt Nam, là những ngƣời
làm việc trong môi trƣờng mà kiến thức, kinh
nghiệm có ảnh hƣởng tới tốc độ ra đời của
sản phẩm đồi hỏi sự phối hợp của các đồng
nghiệp khác trong dây chuyền sản xuất, việc
chia sẻ giữ vai trò quan trọng trong việc nâng
cao kiến thức, kinh nghiệm làm việc cho mỗi
cá nhân và cho cả doanh nghiệp. Các kinh
nghiệm, kiến thức đƣợc chia sẻ cho nhau giúp
doanh nghiệp luôn giữ đƣợc hoạt động ổn
định, không bị rơi vào tình trạng ngƣng trệ
sản xuất nếu một cá nhân trong dây chuyền
sản xuất nghỉ việc. Do vậy, để phát triển tài
sản tri thức thì cần tạo điều kiện làm việc tốt
cho mỗi cá nhân để họ có điều kiện học hỏi
và phát triển. Cách tổ chức các khóa học bồi

Vũ Xuân Nam và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 123 - 129
128
dƣỡng chuyên môn nghiệp vụ, hội thảo
chuyên ngành, sinh hoạt đoàn thể, … là rất
thích hợp cho việc chia sẻ tri thức diễn ra.
Mỗi ngƣời lao động đều có nhu cầu đƣợc học
hỏi kinh nghiệm từ ngƣời khác nên việc chia
sẻ tri thức trong doanh nghiệp có nhu cầu rất
lớn. Lúc này, chỉ cần các nhà quản lý doanh
nghiệp quan tâm, tạo điều kiện cho ngƣời lao
động phát huy vai trò và trách nhiệm của họ
trong công việc. Tạo môi trƣờng, điều kiện
thuận lợi cũng nhƣ có những cơ chế động
viên, khen thƣởng những nhân viên tích cực
học hỏi, chia sẻ kinh nghiệm làm việc cho
những ngƣời khác.
Tóm lại, để tăng cƣờng viêc chia sẻ tri thức
giữa các ngƣời lao động trong doanh nghiệp
thì các nhà quản lý cần quan tâm đến các yếu
tố Ý định chia sẻ tri thức của ngƣời lao động
nhằm tạo điều kiện thuận lợi để ngƣời lao
động trong doanh nghiệp có thể chai sẻ tri
thức với đồng nghiệp.
Bên cạnh đó nhứng đóng góp của bài báo còn
một số hạn chế nhất định. Thứ nhất, hạn chế
về tính đại diên của mẫu do phƣơng pháp lấy
mẫu thuận tiện, đối tƣợng khảo sát chỉ tập
trung tại một số doanh nghiệp trên ba tỉnh
thành: Hà Nội, Thái Nguyên, Bắc Giang. Thứ
hai, đề tài mới chỉ ứng dụng mô hình TPB để
nghiên cứu ý định chia sẻ tri thức của ngƣời
lao động mà chƣa xết đến những yếu tố khác
có ảnh hƣởng nhƣ cấu trúc nhóm, tiến độ
công việc, thói quen cộng tác, bản chất của tri
thức đƣợc chia sẻ (Robertson, 2002)[14] hoặc
cấu trúc công việc, phong cách lãnh đạo
(Lipshitz & Pooper, 2000)[13].
Đây là một hƣớng mới cho các nghiên cứu
tiếp theo, Thứ bam việc chỉ đƣa ba yếu tố tác
động đến Thái độ đối với việc chia sẻ tri thức
là chƣa đủ, dẫn tới R2 hiệu chỉnh chỉ đạt
0.270. Còn những yếu tố khác nhƣ nhận thức
về hữu ích, khả năng tƣơng thích, sự ƣa thích
giúp đỡ ngƣời khác cũng có thể có ảnh hƣởng
(Hung & etc, 2010)[10]. Cần có những
nghiên cứu tiếp theo với những yếu tố trên để
mô hình nghiên cứu đƣợc hoàn thiện hơn.
SUMMARY
DETERMINANTS OF KNOWLEDGE SHARING BEHAVIOR AMONG
EMPLOYEES IN VIETNAMESE ENTERPRISES
Vu Xuan Nam
1,*, Nguyen Van Huan
1, Truong Van Tu
2
1College of Information Technology and Communication – TNU 2National Economic University
Knowledge management is the topic of universal interest and a great number of scholars care
about and invest energy in research for a long time. In Vietnam, this topic is still very new and
there are few studies on it. In fact, Vietnamese enterprises are very interested in knowledge
sharing, experience sharing of employees in order to create competitive advantage, sustainable
development for enterprises. However, the application of the results from research on knowledge
management from foreign scholars to Vietnam still faces many difficulties due to differences in
technological, technical, organizational, cultural factors and especially the human factor.
Starting from practical requirements, the article applied theory of planned behavior to study the
factors that influence sharing knowledge motive power of employees in Vietnamese enterprises.
This article used statistical regression method to test the correctness of research model.
Keywords: Knowledge, knowledge management, model, sharing, behavior.
* Tel: 0943299688; Email: [email protected]
Vũ Xuân Nam và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 123 - 129
129
TÀI LIỆU THAM KHẢO
[1]. Ajzen, I. (2001). Nature and operation of
attitudes. Annales in Review of Psychology, 52:
27-58.
[2]. Ajzen, I. (1991). The theory of planned
behavior. Organizational Behavior and Human
Decision Processes, 50: 179-211,.
[3]. Bock, G.W. and Kim, Y.G. (2002). Breaking
the myths of rewards: an exploratory study of
attitudes about knowledge sharing. Information
Resources Management Journal, 14: 14-21.
[4]. Dong, G., Liem, C.G. and Grossman, M.
(2010). Knowledge-sharing intention in
Vietnamese organizations. Journal of Information
and Knowledge Management Systems, 40(3/4):
262-276.
[5]. Fishbein, M. and Ajzen, I. (1975). Belief,
attitude, intention and behavior: an introduction to
theory and research. Reading, MA: Addison-
Wesley.
[6]. Fishbein, M. and Middlestadt, S. (1997).
A striking lack of evidence for nonbelief-based
attitude formation and change: a response to
five commentaries. Journal of Consumer
Psychology, 6(2): 107-115.
[7]. Grant, R.M., (1996). Prospering in
dynamically- competitive environments:
organizational capability as knowledge
integration. Organization Science, 7(4): 375-387.
[8]. Hair, Jr.J.F., Anderson, R.E., Tatham, R.L.
and Black, W.C. (1998). Multivariate Data
Analysis, 5th ed. Upper Saddle River, NJ:
Prentice-Hall.
[9]. Hofstede, G.H., (1998). Masculinity and
femininity: taboo dimesions of national culture.
Sage Publications, International Educational
and Professional Publisher, London – New
Delhi.
[10]. Hung, S.Y., Lai, H.M. and Chou, Y.C.,
(2010). The determinants of knowledge sharing
intention in professional virtual communities: An
integrative model. PACIS: 1492-1503.
[11]. IKUJIRO NONAKA, RYOKO TOYAMA, TORU
HIRATA (2008), KNOWLEDGE-BASED
MANAGEMENT FOR SUSTAINABLE INNOVATION,
PALGRAVE MACMILLAN.
[12]. Liebowitz, J., (2001). Knowledge
management and its link to artificial intelligence.
Expert Systems with Applications, 20: 1-6.
[13]. Lipshitz, R. and Popper, M.,
(2000). Organizational learning in a hospital.
The Journal of Applied Behavioral Science, 36(3):
345-361.
[14]. Robertson, S. (2002). A tale of two
knowledge - sharing systems. Journal of
Knowledge Management, 6(3): 295-308.
[15]. Ruggles, R., (1998). The state of
notion: knowledge management in practice.
California Management Review, 49(3): 80-89.
[16]. Ryu, S., Ho, S.H. and Han, I.,
(2003). Knowledge sharing behavior of
physicians in hospitals. Expert Systems with
Applications, 25(1): 113-122.
[17]. Sheppard, B.H., Hartwick,J. and
Warshaw, P.R (1988). The theory of reasoned
action: a Meta analysis of past research
with recommendations for modifications and
future research. Journal of Consumer Research,
15(3):325-343, (1988).
Ngày nhận bài: 06/7/2013; Ngày phản biện: 18/9/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: ThS. Đỗ Năng Thắng – Trường ĐH CNTT&TT – ĐHTN

Vũ Xuân Nam và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 123 - 129
130
Hà Thị Thanh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 131 - 135
131
ỨNG DỤNG GIẢI THUẬT DI TRUYỀN VÀO SINH TESTCASE HIỆU QUẢ
Hà Thị Thanh
*, Tô Hữu Nguyên, Nguyễn Hồng Tân,
Nguyễn Văn Việt, Nguyễn Lan Oanh Trường ĐH Công nghệ thông tin và Truyền thông – ĐH Thái Nguyên
TÓM TẮT Giải thuật di truyền là thuật toán giải quyết bài toán bằng cách phỏng sự tiến hóa của con ngƣời
trong điều kiện quy định sẵn của môi trƣờng. Mục tiêu của giải thuật di truyền là đƣa ra lời giải
tƣơng đối tối ƣu với không gian tìm kiếm lớn. Hiện nay giải thuật di truyền đƣợc ứng dụng khá
nhiều trong nhiều lĩnh vực. Trong kiểm chứng và kiểm thử phần mềm, một trong những công việc
quyết định đến sự thành công chính là lựa chọn bộ dữ liệu test sao cho quá trình kiểm chứng và
kiểm thử phần mềm đƣợc nhanh chóng và tìm đƣợc nhiều lỗi trong thời gian và chi phí có hạn,
không gian dữ liệu test thì vô cùng lớn. Vì thế việc tạo ra bộ dữ liệu test nhỏ nhất và tốt nhất để
phát hiện tốt đa lỗi là điều rất quan trọng. Vì vậy trong bài báo này chúng tôi muốn trình bày việc
áp dụng giải thuật di truyền vào bài toán sinh bộ dữ liệu kiểm thử. Bài báo có bố cục nhƣ sau:
phần 2 là trình bày về giải thuật di truyền, phần 3 trình bày một số kỹ thuật kiểm thử sử dụng giải
thuật di truyền nhƣ kiểm thử hộp đen, kiểm thử hộp trắng. Phần 4: trình bày về bài toán chúng tôi
áp dụng để triển khai áp dụng giải thuật di truyền, phần 5 là kết luận.
Từ khóa: Giải thuật di truyền, kiểm thử phần mềm, bộ kiểm thử, testcase, kiểm thử hộp đen, kiểm
thử hộp trắng.
GIỚI THIỆU*
Kiểm thử phần mềm là một pha cần thiết
trong bất cứ dự án phát triển phần mềm nào
để đảm bảo chất lƣợng của sản phẩm phần
mềm. Trong suốt tiến trình kiểm thử, các bộ
kiểm thử đƣợc sử dụng để kiểm thử chƣơng
trình [6,7]. Trong một bộ kiểm thử, mỗi
trƣờng hợp kiểm thử bao gồm: một đầu vào,
một loạt bƣớc thao tác, một kết quả mong đợi.
Kết quả mong đợi này dùng để so sánh với
kết quả thực tế. Kết quả so sánh này quyết
định chƣơng trình cần kiểm tra thỏa mãn thế
nào trong từng trƣờng hợp kiểm thử cụ thể.
Chúng ta luôn nghĩ rằng một bộ kiểm thử tốt
là một bộ kiểm thử có số lƣợng kiểm thử là
nhỏ nhất và có độ bao phủ mã nguồn cao.
Điều đó có nghĩa nó không chỉ tiêu tốn ít bộ
nhớ trong khi chạy và còn có thể phát hiện
một số lƣợng lớn có thể các hành vi của
chƣơng trình cần kiểm tra[6,7,8,9].
Trong kiểm thử phần mềm chia ra làm hai kỹ
thuật: Kiểm thử hộp đen và kiểm thử hộp
trắng. Với mỗi kĩ thuật lại có nhiều kĩ thuật
sinh bộ dữ liệu kiểm thử. Việc nghiên cứu tạo
* Tel: 0982266009; Email: [email protected]
ra các bộ dữ liệu kiểm thử bắt đầu từ những
năm 1970[10]. Cho đến nay rất nhiều bài báo
công bố về việc sinh bộ dữ liệu kiểm thử theo
hƣớng tự động. Tuy nhiên khi sinh bộ dữ liệu
kiểm thử còn gặp nhiều khó khăn và thách
thức. Đa số các nghiên cứu hiện nay việc sinh
bộ dữ liệu kiểm thử chủ yếu dựa vào mã
nguồn, đặc tả và tìm kiếm cơ bản. Trong mấy
năm gần đây việc áp dụng tìm kiếm dựa vào
kinh nhiệm: nhƣ thuật toán leo đồi, simulated
Annealing, thuật toán tiến hóa (giải thuật di
truyền) đang đƣợc áp dụng vào việc sinh bộ
dữ liệu tự động[9]. Trong đó giải thuật di
truyền hiện đang đƣợc áp dụng rất thành công
và rộng rãi trong nhiều lĩnh vực.
GIẢI THUẬT DI TRUYỀN
Giải thuật di truyền dựa trên cơ sở chọn lọc tự
nhiên và quy luật tiến hoá. Giải thuật di
truyền sử dụng các thuật ngữ đƣợc lấy từ di
truyền học nhƣ: lai ghép, đột biến, nhiêm săc
thể (NST), cá thể...Ở đây mỗi cá thể đƣợc đặc
trƣng bởi một tập nhiễm sắc thể, nhƣng để
đơn giản khi trình bày, ta xét trƣờng hợp tế
bào mỗi cá thể chỉ một NST. Các NST đƣợc
chia nhỏ thành các gen đƣợc sắp xếp theo một
dãy tuyến tính. Mỗi cá thể (hay NST) biểu
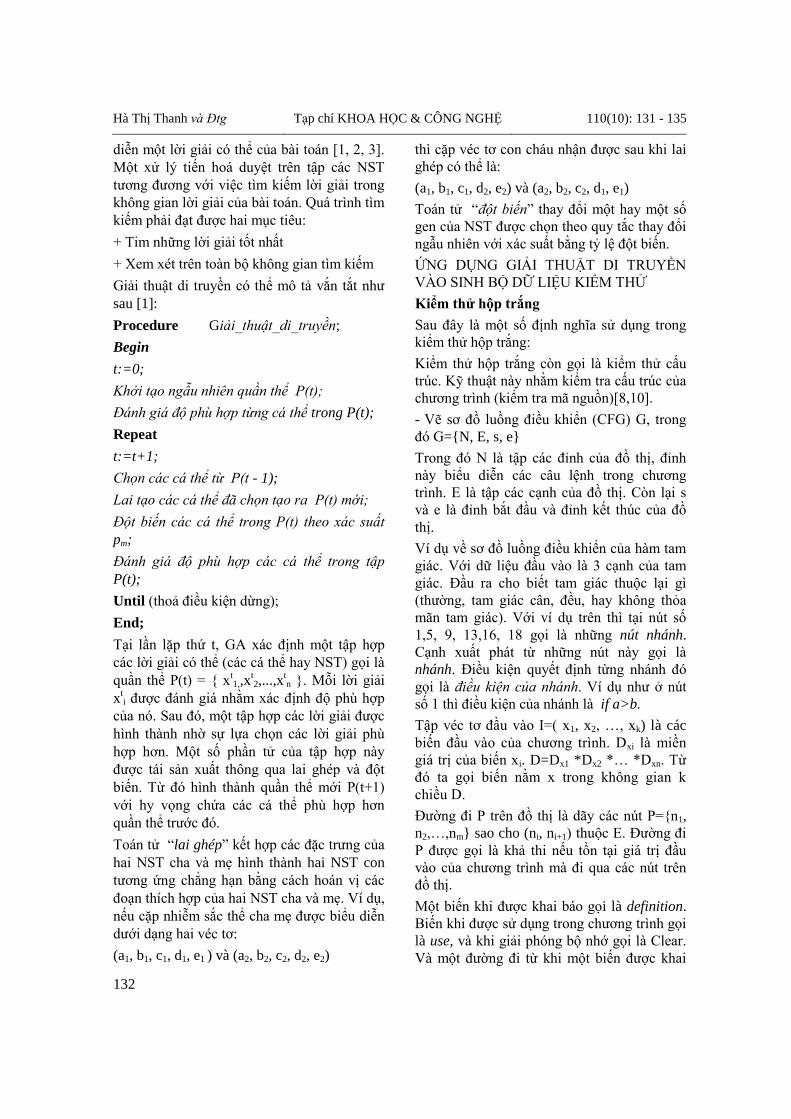
Hà Thị Thanh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 131 - 135
132
diễn một lời giải có thể của bài toán [1, 2, 3].
Một xử lý tiến hoá duyệt trên tập các NST
tƣơng đƣơng với việc tìm kiếm lời giải trong
không gian lời giải của bài toán. Quá trình tìm
kiếm phải đạt đƣợc hai mục tiêu:
+ Tim những lời giải tốt nhất
+ Xem xét trên toàn bộ không gian tìm kiếm
Giải thuật di truyền có thể mô tả vắn tắt nhƣ
sau [1]:
Procedure Giải_thuật_di_truyền;
Begin
t:=0;
Khởi tạo ngẫu nhiên quần thể P(t);
Đánh giá độ phù hợp từng cá thể trong P(t);
Repeat
t:=t+1;
Chọn các cá thể từ P(t - 1);
Lai tạo các cá thể đã chọn tạo ra P(t) mới;
Đột biến các cá thể trong P(t) theo xác suất
pm;
Đánh giá độ phù hợp các cá thể trong tập
P(t);
Until (thoả điều kiện dừng);
End;
Tại lần lặp thứ t, GA xác định một tập hợp
các lời giải có thể (các cá thể hay NST) gọi là
quần thể P(t) = { xt1,,x
t2,...,x
tn }. Mỗi lời giải
xti đƣợc đánh giá nhằm xác định độ phù hợp
của nó. Sau đó, một tập hợp các lời giải đƣợc
hình thành nhờ sự lựa chọn các lời giải phù
hợp hơn. Một số phần tử của tập hợp này
đƣợc tái sản xuất thông qua lai ghép và đột
biến. Từ đó hình thành quần thể mới P(t+1)
với hy vọng chứa các cá thể phù hợp hơn
quần thể trƣớc đó.
Toán tử “lai ghép” kết hợp các đặc trƣng của
hai NST cha và mẹ hình thành hai NST con
tƣơng ứng chẳng hạn bằng cách hoán vị các
đoạn thích hợp của hai NST cha và mẹ. Ví dụ,
nếu cặp nhiễm sắc thể cha mẹ đƣợc biểu diễn
dƣới dạng hai véc tơ:
(a1, b1, c1, d1, e1 ) và (a2, b2, c2, d2, e2)
thì cặp véc tơ con cháu nhận đƣợc sau khi lai
ghép có thể là:
(a1, b1, c1, d2, e2) và (a2, b2, c2, d1, e1)
Toán tử “đột biến” thay đổi một hay một số
gen của NST đƣợc chọn theo quy tắc thay đổi
ngẫu nhiên với xác suất bằng tỷ lệ đột biến.
ỨNG DỤNG GIẢI THUẬT DI TRUYỀN
VÀO SINH BỘ DỮ LIỆU KIỂM THỬ
Kiểm thử hộp trắng
Sau đây là một số định nghĩa sử dụng trong
kiểm thử hộp trắng:
Kiểm thử hộp trắng còn gọi là kiểm thử cấu
trúc. Kỹ thuật này nhằm kiểm tra cấu trúc của
chƣơng trình (kiểm tra mã nguồn)[8,10].
- Vẽ sơ đồ luồng điều khiển (CFG) G, trong
đó G={N, E, s, e}
Trong đó N là tập các đỉnh của đồ thị, đỉnh
này biểu diễn các câu lệnh trong chƣơng
trình. E là tập các cạnh của đồ thị. Còn lại s
và e là đỉnh bắt đầu và đỉnh kết thúc của đồ
thị.
Ví dụ về sơ đồ luồng điều khiển của hàm tam
giác. Với dữ liệu đầu vào là 3 cạnh của tam
giác. Đầu ra cho biết tam giác thuộc lại gì
(thƣờng, tam giác cân, đều, hay không thỏa
mãn tam giác). Với ví dụ trên thì tại nút số
1,5, 9, 13,16, 18 gọi là những nút nhánh.
Cạnh xuất phát từ những nút này gọi là
nhánh. Điều kiện quyết định từng nhánh đó
gọi là điều kiện của nhánh. Ví dụ nhƣ ở nút
số 1 thì điều kiện của nhánh là if a>b.
Tập véc tơ đầu vào I=( x1, x2, …, xk) là các
biến đầu vào của chƣơng trình. Dxi là miền
giá trị của biến xi. D=Dx1 *Dx2 *… *Dxn. Từ
đó ta gọi biến nằm x trong không gian k
chiều D.
Đƣờng đi P trên đồ thị là dãy các nút P={n1,
n2,…,nm} sao cho (ni, ni+1) thuộc E. Đƣờng đi
P đƣợc gọi là khả thi nếu tồn tại giá trị đầu
vào của chƣơng trình mà đi qua các nút trên
đồ thị.
Một biến khi đƣợc khai báo gọi là definition.
Biến khi đƣợc sử dụng trong chƣơng trình gọi
là use, và khi giải phóng bộ nhớ gọi là Clear.
Và một đƣờng đi từ khi một biến đƣợc khai
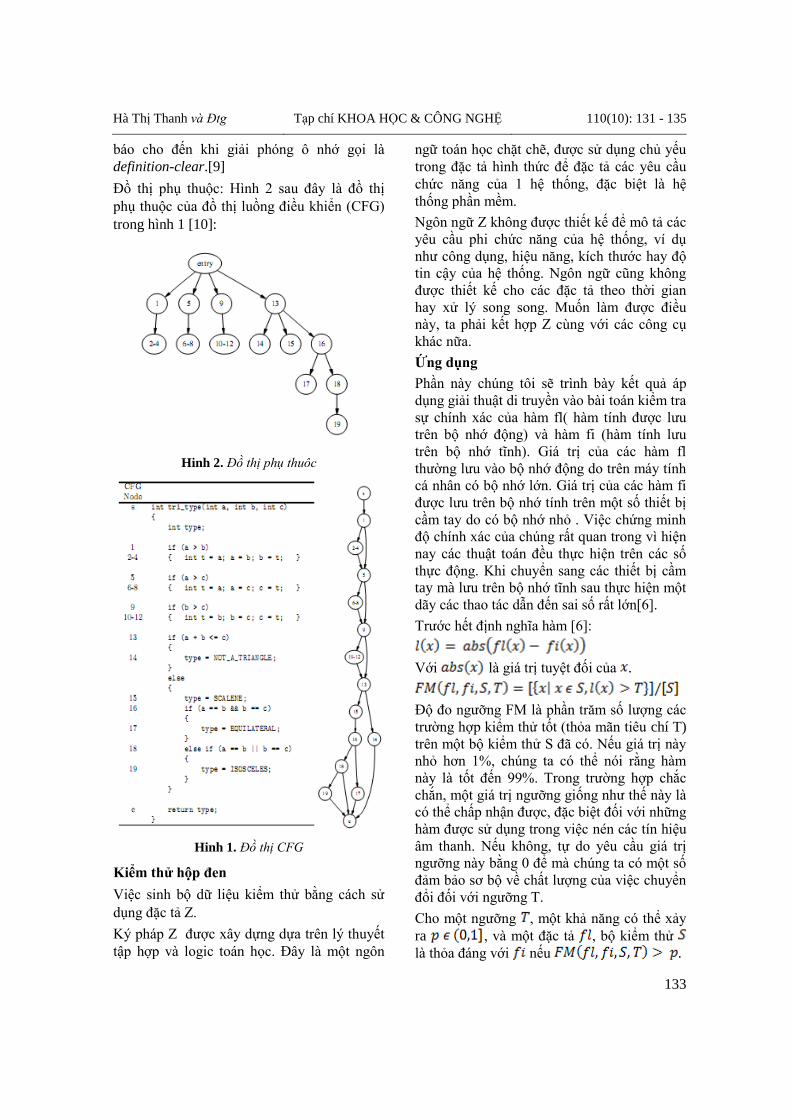
Hà Thị Thanh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 131 - 135
133
báo cho đến khi giải phóng ô nhớ gọi là
definition-clear.[9]
Đồ thị phụ thuộc: Hình 2 sau đây là đồ thị
phụ thuộc của đồ thị luồng điều khiển (CFG)
trong hình 1 [10]:
Hinh 2. Đồ thị phụ thuôc
Hinh 1. Đồ thị CFG
Kiểm thử hộp đen
Việc sinh bộ dữ liệu kiểm thử bằng cách sử
dụng đặc tả Z.
Ký pháp Z đƣợc xây dựng dựa trên lý thuyết
tập hợp và logic toán học. Đây là một ngôn
ngữ toán học chặt chẽ, đƣợc sử dụng chủ yếu
trong đặc tả hình thức để đặc tả các yêu cầu
chức năng của 1 hệ thống, đặc biệt là hệ
thống phần mềm.
Ngôn ngữ Z không đƣợc thiết kế để mô tả các
yêu cầu phi chức năng của hệ thống, ví dụ
nhƣ công dụng, hiệu năng, kích thƣớc hay độ
tin cậy của hệ thống. Ngôn ngữ cũng không
đƣợc thiết kế cho các đặc tả theo thời gian
hay xử lý song song. Muốn làm đƣợc điều
này, ta phải kết hợp Z cùng với các công cụ
khác nữa.
Ứng dụng
Phần này chúng tôi sẽ trình bày kết quả áp
dụng giải thuật di truyền vào bài toán kiểm tra
sự chính xác của hàm fl( hàm tính đƣợc lƣu
trên bộ nhớ động) và hàm fi (hàm tính lƣu
trên bộ nhớ tĩnh). Giá trị của các hàm fl
thƣờng lƣu vào bộ nhớ động do trên máy tính
cá nhân có bộ nhớ lớn. Giá trị của các hàm fi
đƣợc lƣu trên bộ nhớ tính trên một số thiết bị
cầm tay do có bộ nhớ nhỏ . Việc chứng minh
độ chính xác của chúng rất quan trong vì hiện
nay các thuật toán đều thực hiện trên các số
thực động. Khi chuyển sang các thiết bị cầm
tay mà lƣu trên bộ nhớ tĩnh sau thực hiện một
dãy các thao tác dẫn đến sai số rất lớn[6].
Trƣớc hết định nghĩa hàm [6]:
Với là giá trị tuyệt đối của .
Độ đo ngƣỡng FM là phần trăm số lƣợng các
trƣờng hợp kiểm thử tốt (thỏa mãn tiêu chí T)
trên một bộ kiểm thử S đã có. Nếu giá trị này
nhỏ hơn 1%, chúng ta có thể nói rằng hàm
này là tốt đến 99%. Trong trƣờng hợp chắc
chắn, một giá trị ngƣỡng giống nhƣ thế này là
có thể chấp nhận đƣợc, đặc biệt đối với những
hàm đƣợc sử dụng trong việc nén các tín hiệu
âm thanh. Nếu không, tự do yêu cầu giá trị
ngƣỡng này bằng 0 để mà chúng ta có một số
đảm bảo sơ bộ về chất lƣợng của việc chuyển
đổi đối với ngƣỡng T.
Cho một ngƣỡng , một khả năng có thể xảy
ra , và một đặc tả , bộ kiểm thử
là thỏa đáng với nếu .
Hà Thị Thanh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 131 - 135
134
Chúng tôi tiến hành thí nghiệm để chỉ ra
trƣờng hợp kiểm thử tốt nhất để kiểm tra việc
chuyển đổi từ một hàm fl sang một hàm dấu
phẩy tĩnh fi. Từ những hàm nổi tiếng nhất
đƣợc sử dụng để kiểm tra việc thực hiện các
phƣơng thức tối ƣu hóa toàn cục, chúng tôi
chọn ra một danh sách các hàm phức tạp và
phổ biến nhƣ trong bảng 1 dƣới đây. Bắt
nguồn từ mỗi trong danh sách, chúng ta
định nghĩa và
. Mục tiêu của chúng tôi là đi tìm
cực đại toàn cục của của mỗi hàm trong
bảng 1.
Bảng 1. Danh sách các hàm[6]
Stt Tên hàm Định nghĩa
1 Beale f(x,y)=(1.5-x(1-y))2 + (2.25 –
x(1-y2))
2 + (2.625 –x(1-y
3))
2
2 Booth f(x,y)=(x+2y-7)2 +(2x+y-5)
2
3 Himmelblau f(x,y)=(x2 + y -11)
2 + (x + y
2 -7)
2
Sau đây là kết quả thực nghiệm thực hiện trên
3 hàm số trong bảng 1. Cột GA minh họa khi
chạy giải thuật di truyền thì cho ra giá trị
kiểm thử tốt nhất. Với quy mô dân số là 100,
quy mô lựa chọn là 30 và tỉ lệ đột biến là 20,
phần thập phân thiết lập cho các hàm là 6.
Bảng 2. Kết quả
Stt x, y GA
1 x, y €[-20, 20] 9.085015
2 x, y € [-60,60] 19.505000
3 x, y€ [-9, 9] 53.580487
Đối với bài toán này thì ngoài việc thực hiện
trên giải thuật di truyền còn có thể áp dụng
trên giải thuật khác nhƣ giải thuật leo đồi.
KẾT LUẬN
Hiện nay ngoài việc áp dụng giải thuật di
truyền trong việc sinh bộ dữ liệu test hiệu quả
thì còn có thể áp dụng một số phƣơng pháp
tìm kiếm cơ bản khác nhƣ giải thuật leo đồi,
giải thuật tiến hóa, huấn luyện…Và áp dụng
trên các kỹ thuật kiểm thử hộp đên, kiểm thử
hộp trắng, hộp xám[11].
Việc sinh bộ dữ liệu test còn gặp nhiều khó
khăn. Trong kiểm thử hộp trắng sẽ khó tìm ra
tập bao phủ mã nguồn khi độ phức tạp
chƣơng trình lớn. Hơn nữa trong kiểm thử cấu
trúc khi gặp vòng lặp và mảng lớn việc thực
hiện tìm ra bộ dữ liệu test cũng sẽ không thực
hiện đƣợc nhƣ kĩ thuật thông thƣờng, hoặc
khi gặp cấu trúc động. Trong kiểm thử phi
chức năng còn gặp nhiều vấn đề phức tạp nhƣ
tiêu chuẩn và độ đo còn khó thực hiện[11].
Bài báo với mục đích đề xuất phƣơng pháp ứng dụng giải thuật di truyền vào việc sinh bộ dữ liệu test hiệu quả trong khi kiểm thử phần mềm tự động. Giải thuật áp dụng vào kiểm thử hộp trắng, kiểm thử hộp đen. Chúng tôi có áp dụng vào bài toán kiểm tra độ chính xác giữa hai hàm fl và fi bằng cách vận dụng giải thuật di truyền. Trong tƣơng lai sẽ chỉ ra cách áp dụng cụ thể trong phƣơng pháp kiểm thử hộp đen và hộp trắng tổng quát.
TÀI LIỆU THAM KHẢO
[1]. Bài giảng giải thuật di truyền của bộ môn khoa
học máy tính
[2].T. Back, (1996). Evolutionary Algorithms in
Theory and Practice. Oxford University Press, New
York.
[3]. K. Deb and D. Goldberg. “A comparative
analysis of selection schemes used in genetic
algorithms“. In G. J. Rawlins, editor, Foundations
of Genetic Algorithms, pages 69-93. Morgan
Kaufmann, San Mateo, California, USA, 1991.
[4]. D. Goldberg. “Genetic Algorithms in Search,
Optimization and Machine Learning”. Addison-
Wesley , 1989.
[5]. L. Davis. “Handbook of Genetic Algorithms”.
International Thomson Computer Press, 1996.
[6]. W. Miller and D. Spooner. “Automatic
generation of foating-point test data”. IEEE Tr
ansactions on Software Engineering, 223-226, 1976
[7]. Korel. “Automated software test data
generation”. IEEE Transactions on Software
Engineering, 870-879, 1990.
[8]. M. J. Gallagher and V. L. Narasimhan.
ADTEST: “A test data generation suite for ada
software systems”. IEEE Tr ansactions on Software
Engineering, 473-484, 1997.
[9]. B. Korel. “Dynamic method for software test
data generation. Software Testing, Verication and
Reliability”, 203-213, 1992.
[10]. Phil McMinn, Search Based Software T est
Data Generation:A Survey, 105-156, Wiley 2004.
[11]. Hitesh Tahbildar and Bichitra Kalita.
Automated software test data generation: direction
of research.

Hà Thị Thanh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 131 - 135
135
SUMMARY
THE APPLICATION OF GENETIC ALGORITHM
TO EFFECTIVELY GENERATE TEST CASE
Ha Thi Thanh*, To Huu Nguyen, Nguyen Hong Tan,
Nguyen Van Viet, Nguyen Lan Oanh College of Information Technology and Communication – TNU
Genetic algorithms are used to solve problems by simulating the evolution in nature with
predefined constraints from the environment. The goal of GA is to find out the relatively optimal
solution in a big search space. Up to date, GA is widely used in different fields.
One decisive factor contributing to the the success in software testing and verification is to choose
the test data such that the testing and verification process can be done quickly and also to identify
the errors with limited time and resources. The test data space is vast and to generate the test data,
minimal and optimal, to identify the errors is of grave importance. Therefore, we would like to
propose the application of GA to effectively generate test data for software testing and verification.
Keywords: Genetic Algorithms, Software Testing, testcase.
Ngày nhận bài: 25/8/2013; Ngày phản biện: 10/10/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: TS. Vũ Đức Thái – Trường ĐH CNTT&TT – ĐHTN
* Tel: 0982266009; Email: [email protected]

Hà Thị Thanh và Đtg Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 131 - 135
136

Vũ Thị Thu Huyền Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 137 - 141
137
MỘT CÁCH TIẾP CẬN TRONG NHẬP PHIẾU ĐIỂM TỰ ĐỘNG
Vũ Thị Thu Huyền
*
Trường ĐH Công nghệ thông tin và Truyền thông - ĐH Thái Nguyên
TÓM TẮT Nhận dạng phiếu điểm là nhận dạng các ký tự viết tay. Hiện nay, nhận dạng ký tự viết tay vẫn
đang là vấn đề thách thức đối với các nhà nghiên cứu, bài toàn này chƣa thể giải quyết trọn vẹn
đƣợc vì nó phụ thuộc nhiều vào ngƣời viết và sự biến đổi đa dạng trong cách viết và trạng thái tinh
thần của từng ngƣời viết [1].
SVM (Support Vector Machines) là một phƣơng pháp máy học tiên tiến đã có nhiều thành công
không chỉ trong các lĩnh vực khai phá dữ liệu mà còn trong lĩnh vực nhận dạng. SVM đƣợc xây
dựng, mở rộng và phân tích dựa trên lý thuyết một cách chặt chẽ. Ƣu điểm chính của SVM so với
các phƣơng pháp khác là cách giải quyết vấn đề mang tính toàn cục trong khi các phƣơng pháp
khác có thể mang tính cục bộ.
Hiện nay, có nhiều kỹ thuật học máy đƣợc ứng dụng cho bài toán nhận dạng chữ viết tay và cho
kết quả đầy triển vọng. Trong khuôn khổ bài báo này tôi trình bày kỹ thuật SVM phân lớp cho các
điểm số trong phiếu điểm.
Từ khoá: SVM, máy học, máy hỗ trợ vector, nhận dạng.
GIỚI THIỆU*
Vấn đề quản lý điểm trong công tác đào tạo
của các trƣờng Đại học đã đƣợc đơn giản hóa
rất nhiều nhờ vào việc sử dụng các phần mềm
quản lý. Tuy nhiên, vấn đề nhập điểm từ các
phiếu điểm với nhiều loại mẫu phiếu khác
nhau (phiếu điểm thƣờng xuyên, phiếu điều
kiện thi, phiếu biểu phách,…) vào trong cơ
sở dữ liệu vẫn làm mất không ít thời gian
trong công tác quản lý đào tạo. Tuy nhiên để
nhận dạng đƣợc các mẫu phiếu điểm này còn
gặp một số khó khăn về nhận dạng nhƣ: Ảnh
phiếu điểm bị che khuất, bị xoay chiều hay
đơn giản là sự đa dạng trong cách viết.
Trong khuôn khổ bài báo này tôi xây dựng
mô hình thử nghiệm áp dụng kỹ thuật SVM
để phân loại các mẫu phiếu điểm rồi từ đó
nhận dạng ra các mẫu phiếu.
THUẬT TOÁN SVM
Phân lớp nhị phân
Xét ví dụ của bài toán phân lớp nhƣ hình vẽ;
ở đó ta phải tìm một đƣờng thẳng sao cho bên
trái nó toàn là các điểm đỏ, bên phải nó toàn
là các điểm xanh. Bài toán mà dùng đƣờng
thẳng để phân chia này đƣợc gọi là phân lớp
tuyến tính (linear classification).
* Tel: 0982630787; Email: [email protected]
Hình 1. Phân lớp tuyến tính
Hàm tuyến tính phân biệt hai lớp nhƣ sau:
( ) w ( )Ty x x b= F +
Trong đó:
là vector trọng số hay
vector chuẩn của siêu phẳng phân cách, T là
kí hiệu chuyển vị.
là độ lệch
( ) mx RF Î là véc tơ đặc trƣng,
F làm hàm ánh xạ từ không gian đầu vào
sang không gian đặc trƣng.
Tập dữ liệu đầu vào gồm N mẫu input vector
{x1, x2,...,xN}, với các giá trị nhãn tƣơng ứng
là {t1,…,tN} trong đó .
Điểm dữ liệu, mẫu… đều đƣợc hiểu là input
vector xi; nếu là không gian 2 chiều thì đƣờng
phân cách là đƣờng thẳng, nhƣng trong không
gian đa chiều thì gọi đó là siêu phẳng.
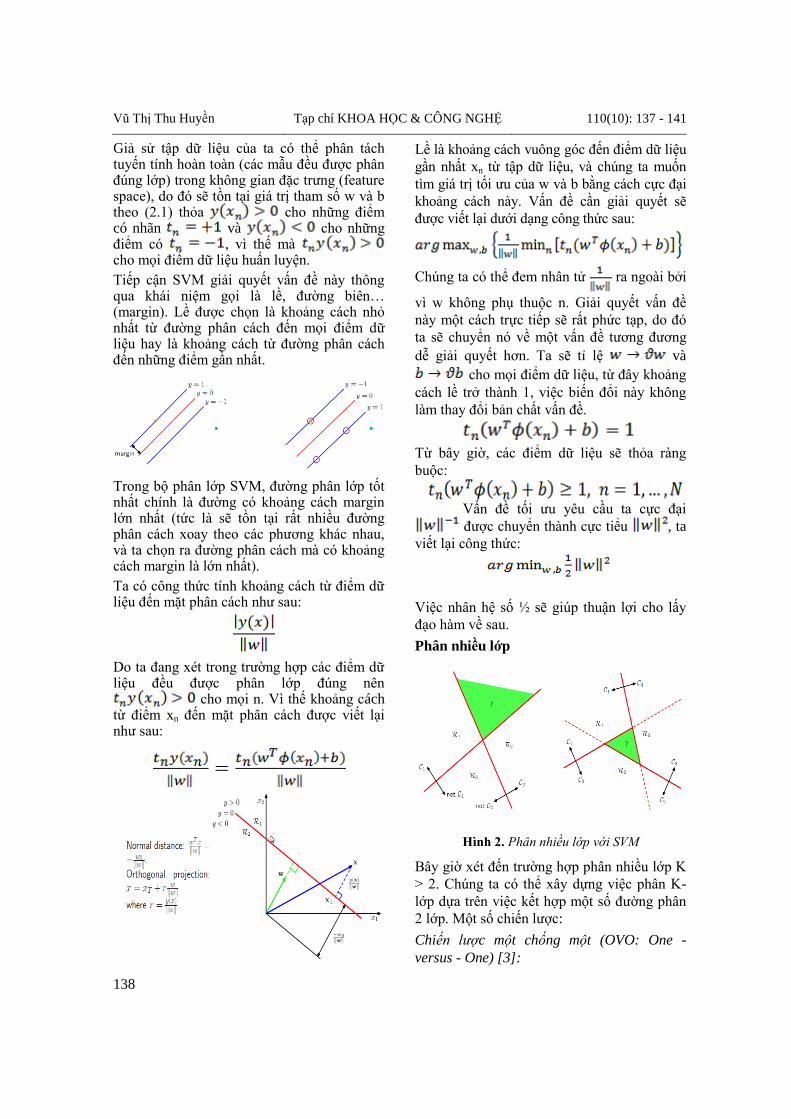
Vũ Thị Thu Huyền Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 137 - 141
138
Giả sử tập dữ liệu của ta có thể phân tách tuyến tính hoàn toàn (các mẫu đều đƣợc phân đúng lớp) trong không gian đặc trƣng (feature space), do đó sẽ tồn tại giá trị tham số w và b theo (2.1) thỏa cho những điểm có nhãn và cho những điểm có , vì thế mà cho mọi điểm dữ liệu huấn luyện.
Tiếp cận SVM giải quyết vấn đề này thông qua khái niệm gọi là lề, đƣờng biên… (margin). Lề đƣợc chọn là khoảng cách nhỏ nhất từ đƣờng phân cách đến mọi điểm dữ liệu hay là khoảng cách từ đƣờng phân cách đến những điểm gần nhất.
Trong bộ phân lớp SVM, đƣờng phân lớp tốt nhất chính là đƣờng có khoảng cách margin lớn nhất (tức là sẽ tồn tại rất nhiều đƣờng phân cách xoay theo các phƣơng khác nhau, và ta chọn ra đƣờng phân cách mà có khoảng cách margin là lớn nhất).
Ta có công thức tính khoảng cách từ điểm dữ liệu đến mặt phân cách nhƣ sau:
Do ta đang xét trong trƣờng hợp các điểm dữ liệu đều đƣợc phân lớp đúng nên
cho mọi n. Vì thế khoảng cách từ điểm xn đến mặt phân cách đƣợc viết lại nhƣ sau:
Lề là khoảng cách vuông góc đến điểm dữ liệu
gần nhất xn từ tập dữ liệu, và chúng ta muốn
tìm giá trị tối ƣu của w và b bằng cách cực đại
khoảng cách này. Vấn đề cần giải quyết sẽ
đƣợc viết lại dƣới dạng công thức sau:
Chúng ta có thể đem nhân tử ra ngoài bởi
vì w không phụ thuộc n. Giải quyết vấn đề
này một cách trực tiếp sẽ rất phức tạp, do đó
ta sẽ chuyển nó về một vấn đề tƣơng đƣơng
dễ giải quyết hơn. Ta sẽ tỉ lệ và
cho mọi điểm dữ liệu, từ đây khoảng
cách lề trở thành 1, việc biến đổi này không
làm thay đổi bản chất vấn đề.
Từ bây giờ, các điểm dữ liệu sẽ thỏa ràng
buộc:
Vấn đề tối ƣu yêu cầu ta cực đại
đƣợc chuyển thành cực tiểu , ta
viết lại công thức:
Việc nhân hệ số ½ sẽ giúp thuận lợi cho lấy
đạo hàm về sau.
Phân nhiều lớp
Hình 2. Phân nhiều lớp với SVM
Bây giờ xét đến trƣờng hợp phân nhiều lớp K
> 2. Chúng ta có thể xây dựng việc phân K-
lớp dựa trên việc kết hợp một số đƣờng phân
2 lớp. Một số chiến lƣợc:
Chiến lược một chống một (OVO: One -
versus - One) [3]:
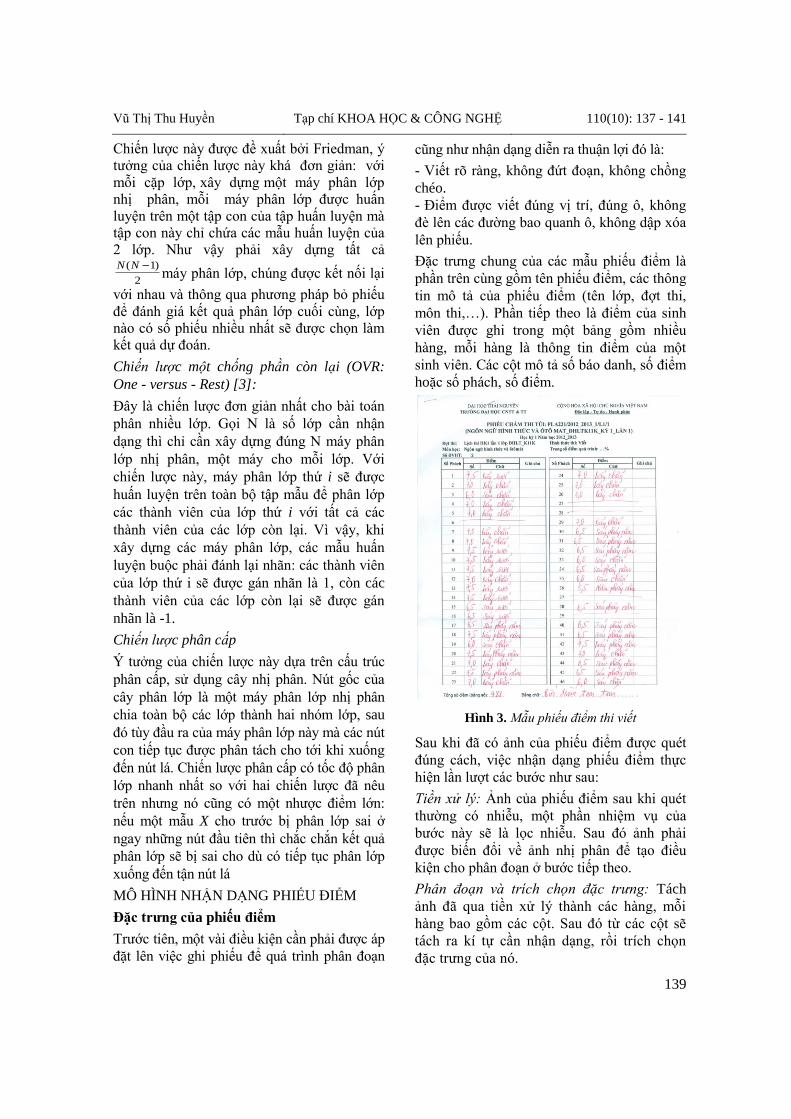
Vũ Thị Thu Huyền Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 137 - 141
139
Chiến lƣợc này đƣợc đề xuất bởi Friedman, ý
tƣởng của chiến lƣợc này khá đơn giản: với
mỗi cặp lớp, xây dựng một máy phân lớp
nhị phân, mỗi máy phân lớp đƣợc huấn
luyện trên một tập con của tập huấn luyện mà
tập con này chỉ chứa các mẫu huấn luyện của
2 lớp. Nhƣ vậy phải xây dựng tất cả ( 1)
2
N Nmáy phân lớp, chúng đƣợc kết nối lại
với nhau và thông qua phƣơng pháp bỏ phiếu
để đánh giá kết quả phân lớp cuối cùng, lớp
nào có số phiếu nhiều nhất sẽ đƣợc chọn làm
kết quả dự đoán.
Chiến lược một chống phần còn lại (OVR:
One - versus - Rest) [3]:
Đây là chiến lƣợc đơn giản nhất cho bài toán
phân nhiều lớp. Gọi N là số lớp cần nhận
dạng thì chỉ cần xây dựng đúng N máy phân
lớp nhị phân, một máy cho mỗi lớp. Với
chiến lƣợc này, máy phân lớp thứ i sẽ đƣợc
huấn luyện trên toàn bộ tập mẫu để phân lớp
các thành viên của lớp thứ i với tất cả các
thành viên của các lớp còn lại. Vì vậy, khi
xây dựng các máy phân lớp, các mẫu huấn
luyện buộc phải đánh lại nhãn: các thành viên
của lớp thứ i sẽ đƣợc gán nhãn là 1, còn các
thành viên của các lớp còn lại sẽ đƣợc gán
nhãn là -1.
Chiến lược phân cấp
Ý tƣởng của chiến lƣợc này dựa trên cấu trúc
phân cấp, sử dụng cây nhị phân. Nút gốc của
cây phân lớp là một máy phân lớp nhị phân
chia toàn bộ các lớp thành hai nhóm lớp, sau
đó tùy đầu ra của máy phân lớp này mà các nút
con tiếp tục đƣợc phân tách cho tới khi xuống
đến nút lá. Chiến lƣợc phân cấp có tốc độ phân
lớp nhanh nhất so với hai chiến lƣợc đã nêu
trên nhƣng nó cũng có một nhƣợc điểm lớn:
nếu một mẫu X cho trƣớc bị phân lớp sai ở
ngay những nút đầu tiên thì chắc chắn kết quả
phân lớp sẽ bị sai cho dù có tiếp tục phân lớp
xuống đến tận nút lá
MÔ HÌNH NHẬN DẠNG PHIẾU ĐIỂM
Đặc trƣng của phiếu điểm
Trƣớc tiên, một vài điều kiện cần phải đƣợc áp
đặt lên việc ghi phiếu để quá trình phân đoạn
cũng nhƣ nhận dạng diễn ra thuận lợi đó là:
- Viết rõ ràng, không đứt đoạn, không chồng
chéo.
- Điểm đƣợc viết đúng vị trí, đúng ô, không
đè lên các đƣờng bao quanh ô, không dập xóa
lên phiếu.
Đặc trƣng chung của các mẫu phiếu điểm là
phần trên cùng gồm tên phiếu điểm, các thông
tin mô tả của phiếu điểm (tên lớp, đợt thi,
môn thi,…). Phần tiếp theo là điểm của sinh
viên đƣợc ghi trong một bảng gồm nhiều
hàng, mỗi hàng là thông tin điểm của một
sinh viên. Các cột mô tả số báo danh, số điểm
hoặc số phách, số điểm.
Hình 3. Mẫu phiếu điểm thi viết
Sau khi đã có ảnh của phiếu điểm đƣợc quét
đúng cách, việc nhận dạng phiếu điểm thực
hiện lần lƣợt các bƣớc nhƣ sau:
Tiền xử lý: Ảnh của phiếu điểm sau khi quét
thƣờng có nhiễu, một phần nhiệm vụ của
bƣớc này sẽ là lọc nhiễu. Sau đó ảnh phải
đƣợc biến đổi về ảnh nhị phân để tạo điều
kiện cho phân đoạn ở bƣớc tiếp theo.
Phân đoạn và trích chọn đặc trưng: Tách
ảnh đã qua tiền xử lý thành các hàng, mỗi
hàng bao gồm các cột. Sau đó từ các cột sẽ
tách ra kí tự cần nhận dạng, rồi trích chọn
đặc trƣng của nó.
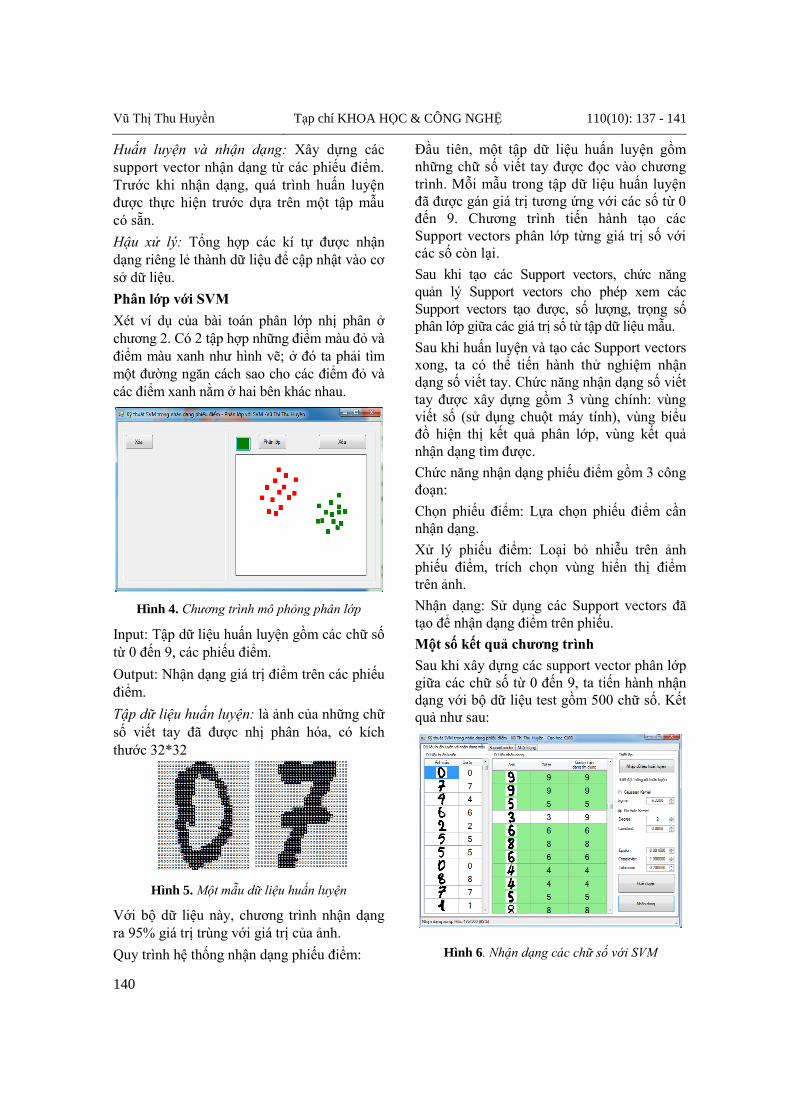
Vũ Thị Thu Huyền Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 137 - 141
140
Huấn luyện và nhận dạng: Xây dựng các
support vector nhận dạng từ các phiếu điểm.
Trƣớc khi nhận dạng, quá trình huấn luyện
đƣợc thực hiện trƣớc dựa trên một tập mẫu
có sẵn.
Hậu xử lý: Tổng hợp các kí tự đƣợc nhận
dạng riêng lẻ thành dữ liệu để cập nhật vào cơ
sở dữ liệu.
Phân lớp với SVM
Xét ví dụ của bài toán phân lớp nhị phân ở
chƣơng 2. Có 2 tập hợp những điểm màu đỏ và
điểm màu xanh nhƣ hình vẽ; ở đó ta phải tìm
một đƣờng ngăn cách sao cho các điểm đỏ và
các điểm xanh nằm ở hai bên khác nhau.
Hình 4. Chương trình mô phỏng phân lớp
Input: Tập dữ liệu huấn luyện gồm các chữ số
từ 0 đến 9, các phiếu điểm.
Output: Nhận dạng giá trị điểm trên các phiếu
điểm.
Tập dữ liệu huấn luyện: là ảnh của những chữ
số viết tay đã đƣợc nhị phân hóa, có kích
thƣớc 32*32
Hình 5. Một mẫu dữ liệu huấn luyện
Với bộ dữ liệu này, chƣơng trình nhận dạng
ra 95% giá trị trùng với giá trị của ảnh.
Quy trình hệ thống nhận dạng phiếu điểm:
Đầu tiên, một tập dữ liệu huấn luyện gồm
những chữ số viết tay đƣợc đọc vào chƣơng
trình. Mỗi mẫu trong tập dữ liệu huấn luyện
đã đƣợc gán giá trị tƣơng ứng với các số từ 0
đến 9. Chƣơng trình tiến hành tạo các
Support vectors phân lớp từng giá trị số với
các số còn lại.
Sau khi tạo các Support vectors, chức năng
quản lý Support vectors cho phép xem các
Support vectors tạo đƣợc, số lƣợng, trọng số
phân lớp giữa các giá trị số từ tập dữ liệu mẫu.
Sau khi huấn luyện và tạo các Support vectors
xong, ta có thể tiến hành thử nghiệm nhận
dạng số viết tay. Chức năng nhận dạng số viết
tay đƣợc xây dựng gồm 3 vùng chính: vùng
viết số (sử dụng chuột máy tính), vùng biểu
đồ hiện thị kết quả phân lớp, vùng kết quả
nhận dạng tìm đƣợc.
Chức năng nhận dạng phiếu điểm gồm 3 công
đoạn:
Chọn phiếu điểm: Lựa chọn phiếu điểm cần
nhận dạng.
Xử lý phiếu điểm: Loại bỏ nhiễu trên ảnh
phiếu điểm, trích chọn vùng hiển thị điểm
trên ảnh.
Nhận dạng: Sử dụng các Support vectors đã
tạo để nhận dạng điểm trên phiếu.
Một số kết quả chƣơng trình
Sau khi xây dựng các support vector phân lớp
giữa các chữ số từ 0 đến 9, ta tiến hành nhận
dạng với bộ dữ liệu test gồm 500 chữ số. Kết
quả nhƣ sau:
Hình 6. Nhận dạng các chữ số với SVM
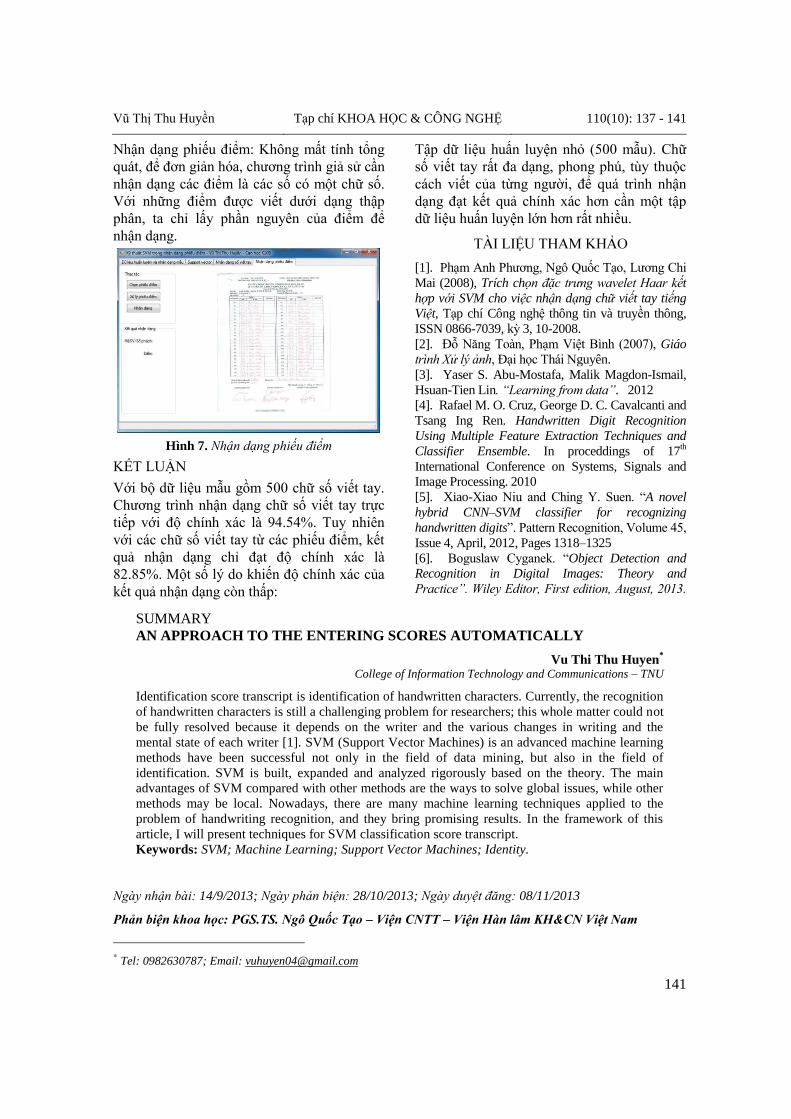
Vũ Thị Thu Huyền Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 137 - 141
141
Nhận dạng phiếu điểm: Không mất tính tổng
quát, để đơn giản hóa, chƣơng trình giả sử cần
nhận dạng các điểm là các số có một chữ số.
Với những điểm đƣợc viết dƣới dạng thập
phân, ta chỉ lấy phần nguyên của điểm để
nhận dạng.
Hình 7. Nhận dạng phiếu điểm
KẾT LUẬN
Với bộ dữ liệu mẫu gồm 500 chữ số viết tay.
Chƣơng trình nhận dạng chữ số viết tay trực
tiếp với độ chính xác là 94.54%. Tuy nhiên
với các chữ số viết tay từ các phiếu điểm, kết
quả nhận dạng chỉ đạt độ chính xác là
82.85%. Một số lý do khiến độ chính xác của
kết quả nhận dạng còn thấp:
Tập dữ liệu huấn luyện nhỏ (500 mẫu). Chữ
số viết tay rất đa dạng, phong phú, tùy thuộc
cách viết của từng ngƣời, để quá trình nhận
dạng đạt kết quả chính xác hơn cần một tập
dữ liệu huấn luyện lớn hơn rất nhiều.
[1]. Phạm Anh Phƣơng, Ngô Quốc Tạo, Lƣơng Chi
Mai (2008), Trích chọn đặc trưng wavelet Haar kết
hợp với SVM cho việc nhận dạng chữ viết tay tiếng
Việt, Tạp chí Công nghệ thông tin và truyền thông,
ISSN 0866-7039, kỳ 3, 10-2008.
[2]. Đỗ Năng Toàn, Phạm Việt Bình (2007), Giáo
trình Xử lý ảnh, Đại học Thái Nguyên.
[3]. Yaser S. Abu-Mostafa, Malik Magdon-Ismail,
Hsuan-Tien Lin. “Learning from data”. 2012
[4]. Rafael M. O. Cruz, George D. C. Cavalcanti and
Tsang Ing Ren. Handwritten Digit Recognition
Using Multiple Feature Extraction Techniques and
Classifier Ensemble. In proceddings of 17th
International Conference on Systems, Signals and
Image Processing. 2010
[5]. Xiao-Xiao Niu and Ching Y. Suen. “A novel
hybrid CNN–SVM classifier for recognizing
handwritten digits”. Pattern Recognition, Volume 45,
Issue 4, April, 2012, Pages 1318–1325
[6]. Boguslaw Cyganek. “Object Detection and
Recognition in Digital Images: Theory and
Practice”. Wiley Editor, First edition, August, 2013.
SUMMARY
AN APPROACH TO THE ENTERING SCORES AUTOMATICALLY
Vu Thi Thu Huyen*
College of Information Technology and Communications – TNU
Identification score transcript is identification of handwritten characters. Currently, the recognition
of handwritten characters is still a challenging problem for researchers; this whole matter could not
be fully resolved because it depends on the writer and the various changes in writing and the
mental state of each writer [1]. SVM (Support Vector Machines) is an advanced machine learning
methods have been successful not only in the field of data mining, but also in the field of
identification. SVM is built, expanded and analyzed rigorously based on the theory. The main
advantages of SVM compared with other methods are the ways to solve global issues, while other
methods may be local. Nowadays, there are many machine learning techniques applied to the
problem of handwriting recognition, and they bring promising results. In the framework of this
article, I will present techniques for SVM classification score transcript.
Keywords: SVM; Machine Learning; Support Vector Machines; Identity.
Ngày nhận bài: 14/9/2013; Ngày phản biện: 28/10/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: PGS.TS. Ngô Quốc Tạo – Viện CNTT – Viện Hàn lâm KH&CN Việt Nam
* Tel: 0982630787; Email: [email protected]

Vũ Thị Thu Huyền Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 137 - 141
142

Nguyễn Anh Tuấn Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 143 - 147
143
ỨNG DỤNG THUẬT TOÁN MSA CHO MÃ LDPC
Nguyễn Anh Tuấn
*
Trường ĐH Công nghệ thông tin và Truyền thông – ĐH Thái Nguyên
TÓM TẮT Bài báo đi sâu nghiên cứu thuật toán giải mã MSA (Min-Sum Algorithm) cho mã kiểm tra chẵn lẻ
mật độ thấp (Low-Density Parity-Check code - LDPC) từ đó thực hiện đánh giá chất lƣợng của thuật
toán giải mã này cho kênh gauss và kênh fadinh. Qua phân tích kết quả mô phỏng cho thấy hiệu quả
sửa lỗi của thuật toán giải mã MSA không suy giảm so với thuật toán giải mã truyền thống SPA
(Sum-Product Algorithm) nhƣng lại cho hiệu quả về thời gian xử lý tín hiệu tới 5 đến 6 lần.
Từ khóa: Thuật toán giải mã MSA, thuật toán giải mã SPA, mã LDPC, kênh fadinh Rayleigh. kênh
AWGN.
MÃ LDPC VÀ THUẬT TOÁN GIẢI MÃ SPA
Mã LDPC (low density parity check code) là
mã kiểm tra chẵn lẻ mật độ thấp trong giai
đoạn hiện nay đang đƣợc quan tâm và nghiên
cứu khá mạnh mẽ, đƣợc khuyến nghị sử dụng
trong các hệ thống thông tin số hiện đại nhƣ:
DVB-S2 (Digital Video Broadcasting), 10
Gigabit Ethernet (10GBASE-T),WiFi
,WiMAX và hơn nữa LDPC đƣợc chọn là mã
dự phòng dài hạn cho các hệ thống thông tin
di động thế hệ mới. Tuy nhiên, xuất phát từ
tính chất phức tạp của các thuật toán giải mã
đã cản trở việc áp dụng LDPC, mặc dù mã
này có khả năng cho chất lƣợng tiệm cận giới
hạn Shannon và thời điểm ra đời khá sớm
(khoảng năm 1962). Vấn đề chính của bài báo
này là nghiên cứu thuật toán giải mã cho
LDPC với hƣớng giảm độ phức tạp dựa trên
thuật toán Min-Sum [1, 2], trình bày mô hình
ứng dụng mã LDPC cho kênh Gauss, kênh
fadinh, phân tích một số kết quả mô phỏng
trên các mô hình kênh này đối với các thuật
toán SPA và MSA.*
Hiện nay rất nhiều hƣớng nghiên cứu đặt ra
với mục đích giảm sự phức tạp thuật toán và
Min-Sum (MSA) cũng là một trong số đó,
MSA đƣợc hình thành trên cơ sở phát triển,
cải tiến thuật toán SPA (Sum – Product
Algorithm) - thuật toán mà Mackay-Neal đã
sử dụng để chứng minh LDPC code có thể
tiệm cận giới hạn Shannon. Do đó, để tiện cho
* Tel: 0912998396; Mail: [email protected]
việc tìm hiểu MSA chúng ta khái quát lại một
số nét chính thuật toán SPA [1, 2].
Thuật toán SPA bao gồm 5 bƣớc nhƣ sau:
Bƣớc 1: Tính xác xuất tiên nghiệm của tất cả
các nút bit: For 0i to 1 n do
set Pr( 1| )i i iP c y (1)
với iy là ký tự thứ i mà kênh nhận đƣợc, sau
đó:
set (0) 1ij iq P
(2)
(1)ij iq P (3)
với , i j thỏa mãn: 1ijh
Bƣớc 2: Tính ( )ijr x - xác suất để nút kiểm tra
thỏa mãn bằng 1 hoặc 0.
’
' \
1 10 1 2 1
2 2
M
ji i j
i Vj i
r q
(4)
(5)
Bƣớc 3: Tính ( )ijq x - xác suất bít mã bằng x
với điều kiện các nút kiểm tra với
i thuộc tập các nút kiểm tra nối tới nút bít
ic trừ nút bít cj.
ij
' \
(0) 1 ' (0)ij i
j Ci j
q K P rj i
(6)
ij ij '
' \
(1) (1)i
i j i
j C j
q K P r
(7)
Với ijK là hằng số.

Nguyễn Anh Tuấn Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 143 - 147
144
Bƣớc 4: Tính ma trận xác suất hậu nghiệm.
For i=0 to n-1
(0) (1 ) (0)i
i i i ji
j C
Q K P r (8)
(1) (1)i
i i i ji
j C
Q K P r (9)
Bƣớc 5: Đƣa ra từ mã.
For i=0 to n-1
If (1) (0)i iQ Q then 1ic
else 0ic
If ( * 0Tc H ) or (số vòng lặp = max)
then Stop
Else go to step 2.
THUẬT TOÁN GIẢI MÃ MSA
Nhƣ trên đã nêu trên, MSA hình thành từ
thuật toán SPA, cụ thể để hình thành lên MSA
ta thực hiện một số cải tiến trong các bƣớc
của SPA nhƣ sau [3]:
Bƣớc 1: Thay vì tính ijq ta đi tính
ij
ij
(0)( ) log .
(1)ij
qL q
q (10)
Bƣớc 2: Vì
1 1 0 ij ijr r 0 1 1ij ijr r
Thay vào phƣơng trình (4) ta có :
’
' \
1 2 (1) 1 2 1 .M
ij i j
i Vj i
r q (11)
Mặt khác trong thực tế
110
1
0 21))log(2
1tanh( PPP
P
P (12)
Thay (12) vào (11) ta có:
))(2
1tanh())(
2
1tanh( '
'' \ji
iVji
ij qLrL (13)
suy ra:
' ' '
' '\ ' '\
1 1tanh tanh ,
2 2i j i j i j
i Vj i i Vj i
L q (14)
với:
ij ij 'L q i j; ijij sign L q ;
' .i j ijL q
Cuối cùng ta có:
))2
1tanh((tanh2.)( '
'
'
'
1
ijj
ijj
ijrL (15)
= 1 1
' '
' '
1.2 tanh log log tanh
2i j i j
i i
= 1 1
' '
''
1.2 tanh log log tanh
2i j i j
ii
= ' '
' \'
. .i j i j
i Vj ii
(16)
Với
exp( ) 1( ) log tanh log
2 exp( ) 1
x xx
x
Ví dụ: phƣơng trình cho kênh BI-AWGN:
2 2 /ij i iL q L c y (17)
Mặt khác, để ý tiếp đến phƣơng trình (16) để
tính ( )ijL r . Ta có:
' ''
mini j i ji
i
,min '' \
i ji Vj i
(18)
Vì ( )x tƣơng ứng với giá trị nhỏ nhất của
'i j trong ' ,i j
i
do đó:
ij i'j '' \'
r . minj
i ji V ii
L (19)
Bƣớc 3 và 4: logarit hai vế (19):
’
' \
ij i j i
j Cj j
L q L c L r (20)
i i ji
j Ci
L Q L c L r (21)
Trong đó:(0)
(1)
ij
ij
ij
qL q Log
q,
i ii
i i
Pr(c =0|y )L c Log
Pr(c =1|y ),
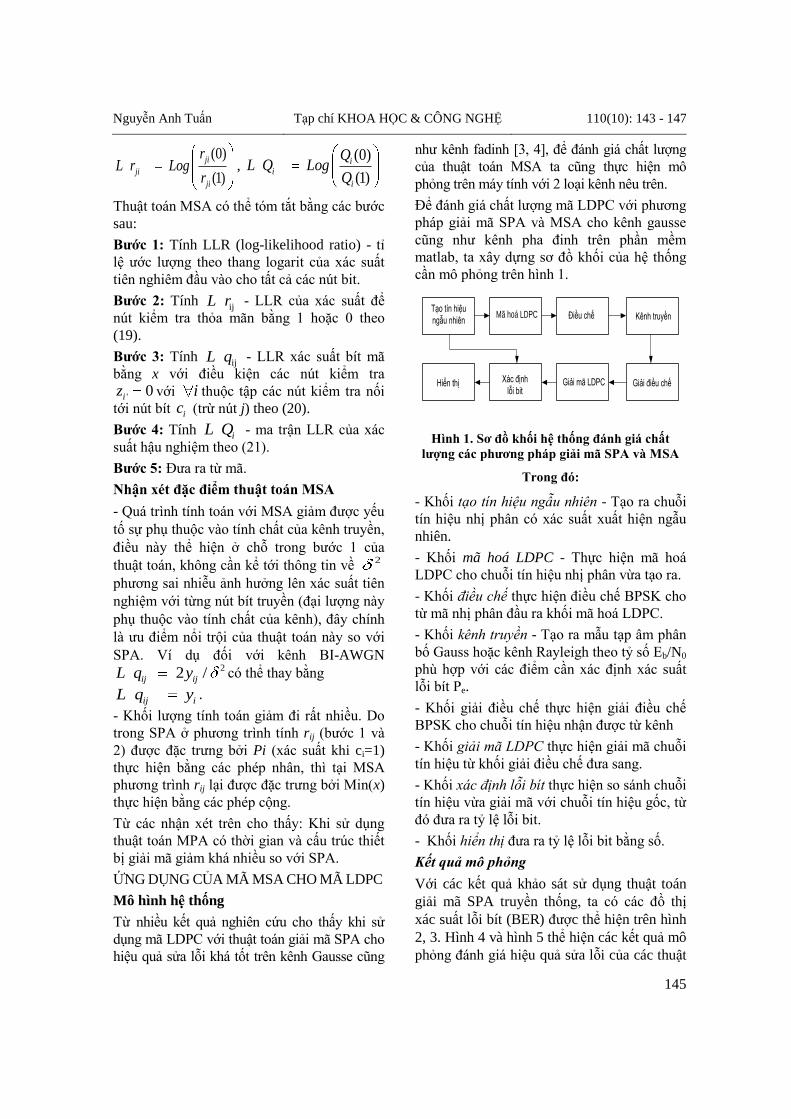
Nguyễn Anh Tuấn Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 143 - 147
145
(0)
(1)
ji
ji
ji
rL r Log
r,
(0)
(1)
ii
i
QL Q Log
Q
Thuật toán MSA có thể tóm tắt bằng các bƣớc
sau:
Bƣớc 1: Tính LLR (log-likelihood ratio) - tỉ
lệ ƣớc lƣợng theo thang logarit của xác suất
tiên nghiêm đầu vào cho tất cả các nút bit.
Bƣớc 2: Tính ijL r - LLR của xác suất để
nút kiểm tra thỏa mãn bằng 1 hoặc 0 theo
(19).
Bƣớc 3: Tính ijL q - LLR xác suất bít mã
bằng x với điều kiện các nút kiểm tra
' 0iz với i thuộc tập các nút kiểm tra nối
tới nút bít ic (trừ nút j) theo (20).
Bƣớc 4: Tính iL Q - ma trận LLR của xác
suất hậu nghiệm theo (21).
Bƣớc 5: Đƣa ra từ mã.
Nhận xét đặc điểm thuật toán MSA
- Quá trình tính toán với MSA giảm đƣợc yếu
tố sự phụ thuộc vào tính chất của kênh truyền,
điều này thể hiện ở chỗ trong bƣớc 1 của
thuật toán, không cần kể tới thông tin về 2
phƣơng sai nhiễu ảnh hƣởng lên xác suất tiên
nghiệm với từng nút bít truyền (đại lƣợng này
phụ thuộc vào tính chất của kênh), đây chính
là ƣu điểm nổi trội của thuật toán này so với
SPA. Ví dụ đối với kênh BI-AWGN 2 2 /ij ijL q y có thể thay bằng
ij iL q y .
- Khối lƣợng tính toán giảm đi rất nhiều. Do
trong SPA ở phƣơng trình tính rij (bƣớc 1 và
2) đƣợc đặc trƣng bởi Pi (xác suất khi ci=1)
thực hiện bằng các phép nhân, thì tại MSA
phƣơng trình rij lại đƣợc đặc trƣng bởi Min(x)
thực hiện bằng các phép cộng.
Từ các nhận xét trên cho thấy: Khi sử dụng
thuật toán MPA có thời gian và cấu trúc thiết
bị giải mã giảm khá nhiều so với SPA.
ỨNG DỤNG CỦA MÃ MSA CHO MÃ LDPC
Mô hình hệ thống
Từ nhiều kết quả nghiên cứu cho thấy khi sử
dụng mã LDPC với thuật toán giải mã SPA cho
hiệu quả sửa lỗi khá tốt trên kênh Gausse cũng
nhƣ kênh fadinh [3, 4], để đánh giá chất lƣợng
của thuật toán MSA ta cũng thực hiện mô
phỏng trên máy tính với 2 loại kênh nêu trên.
Để đánh giá chất lƣợng mã LDPC với phƣơng
pháp giải mã SPA và MSA cho kênh gausse
cũng nhƣ kênh pha đinh trên phần mềm
matlab, ta xây dựng sơ đồ khối của hệ thống
cần mô phỏng trên hình 1.
Tạo tín hiệu
ngẫu nhiên
Mã hoá LDPC Điều chế Kênh truyền
Giải điều chếGiải mã LDPCXác định
lỗi bitHiển thị
Hình 1. Sơ đồ khối hệ thống đánh giá chất
lƣợng các phƣơng pháp giải mã SPA và MSA
Trong đó:
- Khối tạo tín hiệu ngẫu nhiên - Tạo ra chuỗi
tín hiệu nhị phân có xác suất xuất hiện ngẫu
nhiên.
- Khối mã hoá LDPC - Thực hiện mã hoá
LDPC cho chuỗi tín hiệu nhị phân vừa tạo ra.
- Khối điều chế thực hiện điều chế BPSK cho
từ mã nhị phân đầu ra khối mã hoá LDPC.
- Khối kênh truyền - Tạo ra mẫu tạp âm phân
bố Gauss hoặc kênh Rayleigh theo tỷ số Eb/N0
phù hợp với các điểm cần xác định xác suất
lỗi bít Pe.
- Khối giải điều chế thực hiện giải điều chế
BPSK cho chuỗi tín hiệu nhận đƣợc từ kênh
- Khối giải mã LDPC thực hiện giải mã chuỗi
tín hiệu từ khối giải điều chế đƣa sang.
- Khối xác định lỗi bít thực hiện so sánh chuỗi
tín hiệu vừa giải mã với chuỗi tín hiệu gốc, từ
đó đƣa ra tỷ lệ lỗi bit.
- Khối hiển thị đƣa ra tỷ lệ lỗi bit bằng số.
Kết quả mô phỏng
Với các kết quả khảo sát sử dụng thuật toán
giải mã SPA truyền thống, ta có các đồ thị
xác suất lỗi bít (BER) đƣợc thể hiện trên hình
2, 3. Hình 4 và hình 5 thể hiện các kết quả mô
phỏng đánh giá hiệu quả sửa lỗi của các thuật

Nguyễn Anh Tuấn Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 143 - 147
146
toán SPA và MSA cho mô hình kênh Gauss
và kênh pha đinh sử dụng phƣơng thức điều
chế tín hiệu là BPSK, số vòng lặp cực đại là
30 với các độ dài từ mã khác nhau.
Hình 2. Đồ thị BER sử dụng các mã LDPC có tỉ lệ
mã 1/2, 2/3 với H (39x78) trên kênh AWGN
0 1 2 3 4 5 610
-7
10-6
10-5
10-4
10-3
10-2
10-1
Eb/No
BE
R
So sanh BER cua ma LDPC tren kenh AWGN va kenh Rayleigh
ma LDPC kenh Rayleigh
ma LDPC kenh AWGN
BER ko ma
Hình 3. Đồ thị BER sử dụng mã LDPC với H
(39x78) trên kênh AWGN và kênh Rayleigh
Hình 4. Đồ thị so sánh xác suất lỗi bít trên kênh
pha đinh và kênh Gausse khi sử dụng mã LDPC
với H(39,78) với các thuật toán SPA và MSA
Hình 5. Xác suất lỗi bít kênh pha đinh khi sử
dụng mã LDPC với H(39,78) và tỉ lệ mã
(1527,3054)
Việc sử dụng mã LDPC cho sự cải thiện chất
lƣợng hệ thống rõ rệt so với trƣờng hợp
không dùng mã cho cả 2 loại kênh. Ví dụ, từ
hình 5 thấy rằng: ở giá trị xác suất lỗi bít Pe =
3.10-4 cần tỉ lệ / =4,5 dBEb No trong
trƣờng hợp sử dụng mã LDPC có ma trận
kiểm tra H(39x78) và khi không mã yêu cầu
/ =7,5 dBEb No (cho kênh Gausse), nhƣ
vậy đạt đƣợc tăng ích mã hoá là 3dB, đại
lƣợng này còn tăng một cách đáng kể đối với
kênh fadinh, đặc biệt khi /Eb No tăng. Khi độ
dài từ mã tăng, khả năng sửa lỗi của mã cải
thiện một cách đáng kể, ví dụ: từ hình 5 cho
thấy tại Pe=10-3
, đối với kênh fadinh, khi sử
dụng mã LDPC có ma trận kiểm tra H(39x78)
cần / =7,5 dB,Eb No còn với mã LDPC có
ma trận H(1527x3054) tƣơng ứng với
/ =6,5 dB.Eb No Tức là đạt đƣợc tăng ích
mã hoá là 1 dB cho cả 2 thuật toán giải mã
MSA và SPA.
Chất lƣợng sửa lỗi của thuật toán MSA
tƣơng tự nhƣ SPA ở mọi giá trị Eb/N0 nhƣng
thời gian xử lý tín hiệu giảm đáng kể. Cụ thể
là: Trong quá trình mô phỏng sử dụng máy
tính pentium IV ram 1 G tốc độ vi xử lý là
3.06 GHZ với thuật toán MSA thì thời gian
thực hiện giảm khoảng 5 đến 6 lần so với
việc sử dụng thuật toán SPA, kết quả này có
thể giải thích thông qua các nhận xét về thuật
toán MSA.

Nguyễn Anh Tuấn Tạp chí KHOA HỌC & CÔNG NGHỆ 110(10): 143 - 147
147
KẾT LUẬN
Từ những kết quả chính trong bài báo ta có
thể nhận định rằng:
- Không chỉ với kênh AWGN mà đối với
kênh fadinh Rayleigh, mã LDPC luôn cho
chất lƣợng sửa lỗi tốt, điều này rất có ý nghĩa
trong các hệ thống thông tin vô tuyến số.
- Sử dụng thuật toán giải mã MSA có khối
lƣợng tính toán và thời gian giải mã cải thiện
hơn rất nhiều so với thuật toán truyền thống
(SPA) mà không làm giảm khả năng sửa lỗi
của mã, điều này có ý nghĩa rất lớn với mục
đích sử dụng mã LDPC cho các hệ thống
truyền tin số, ở đó tín hiệu đáp ứng yêu cầu
thời gian thực, cũng nhƣ tác dụng giảm độ
phức tạp cho thiết bị giải mã.
TÀI LIỆU THAM KHẢO
[1]. R.Gallager (192), Low-density parity-check
codes, IRE Trans. Information Theory.
[2]. William E.Ryan, An introduction to LDPC
codes, 2003.
[3]. В. Б Афанасьева, Искусство
помехоусточивого кодирования, Теносфера.314
стр. 2005.
[4]. Phạm Xuân Nghĩa, Nguyễn Văn Linh, Lê Văn
Thái, Nguyễn Anh Tuấn. Nghiên cứu hiệu quả sửa
lỗi của mã LDPC cho kênh fadinh. Tạp chí Khoa
học và công nghệ - Đại học Công nghiệp Hà Nội,
Số 5.2011. Tr 21-24.
SUMMARY
APPLICATION MSA ALGORITHM FOR LDPC CODES
Nguyen Anh Tuan
*
College of Information Technology and Communications – TNU
The main content of this paper is analyzed Min-Sum Algorithm (MSA) for decoding LDPC codes
(Low Density Parity Check codes ) to assess its performance. It is a improving solution for the
tradition decoding SPA (Sum Product Algorithm). Simulation results show that performance of
LDPC codes do not effect but decoding time decreases 5 to 6 times.
Keywords: Min-Sum Algorithm, Sum-Product Algorithm, LDPC code, Rayleigh fading channels,
AWGN channel.
Ngày nhận bài: 11/10/2013; Ngày phản biện: 21/10/2013; Ngày duyệt đăng: 08/11/2013
Phản biện khoa học: TS. Nguyễn Duy Minh – Trường ĐH CNTT&TT – ĐHTN
* Tel: 0912998396; Email: [email protected]
THE Lf,a
GUIBAIT4p chi Khoa hoc vd C6ng nghQ DAi hqc Th6i Nguydn thucmg xuy€n nhqn dang
nhimg bdi b6o cira c6n bQ giang d4y, can.bQ.nghi6n criu vd c6c nhd khoa hgc...trong vdngodi Dai hoc Th6i Nguy€n nhim c6ng b6 k6t qu6 nghidn cftu, bdi tdng quan ho4c nhtngth6ng tin trao d6i thuQc moi linh v.uc khoa hgc c6ng
"ghe. Sau ddy ld thile gui bdi cho Tda
so?n:
1. T?p chf chi nhfln ddng.nhimg bdi b6o khoa hoc chua c6ng bd tren cdcbfuo,tpp chikhoa hgc trong nu6c vd qu6c t6.
2.Biib6o khoa hgc c6 th6 vi€t bang ti6ng Vi€t hoac tiring Anh.3. Khi nQp cho tda soq.n, m6i Uai b6o cdn dugc in thanh hai ban tr€n gi6y &, kdm
theo dia CD.4. Cdutrtic bdi b6o.4.1. T€n bdi b6o.4.2. Ho. t6n t6c gi6 hopc nh6m thc giir, co quan cdng t6c.4.3. M6i bdi b6o kh6ng dai qu6 5 trang (khoang 3.000 tu). Trong bdi b6o, o nhthrg nQi
dung t6c gi? da tl.t* kh6o hoflc sir dung k6t qu6 nghiOn ciru tu c6c tdi ligu khoa hoc khilc, cAndanh d6u bang s6 (dpt trong m6c vu6ng tl) - h rd tni Lu cria tai li6u x6p trong danh mpc taili6u tham khdo.
4.4. Tom tit n6i .dmg bdi b5o: tOi tnieu 150 tir bing titing ViQt vd dugc dfch sangti6ng Anh (kc cd ti6u ac Uai 96o), du6i mpc t6m t6t ti6ng viet ro "Tir kh6a"; du6i t6m tiiti6ng Anh c6 ooKey words" ltOi tfrieu 05 tt ho{c cpm til).
4.5. Tdi liQu tham kh6o:- TLTK s6p x6p theo vAn A,B,C, tdi liQu.ti6ng nudc ngodi kh6ng phi€n Am, kh6ng dfch.- E6i v6i t6c gi6 ld ngudi ViQt Nam xtip theo thri tg A, B, C itrio tAn (V,h6ngdao t0n
l6n tru6c h9).- DOi voi titcgid ld ngudi nudc ngodi xtip theo thf tp A, B, C theo hp.- DOi vdi nhirng tdi liQu kh6ng c6 tdn tic gihxtip thri tu A, B, C cira tt ctAu ti€n l€n
co quan ban hdnh tdi liQu'(vi dp: BQ Gi6o dpc vd Ddo t4o x6p vdn B).TLTK ld s6c!, lu0n an can ghr dAy dir c6c th6ng tin theo thri t.u: t6n tfuc gihho{c co quan
ban hanh, (I.{am xu'At ban;, ftn sdch,Nhd xuit ban, ncfxu,St ban.TLTK ld bei brio hodc bdi trong mQt cu6n s6ch... cdn ghi dAy dri c6c thdng tin theo
thri tg: Tdn t6c gid, (Nam c6ng b6), "T€n bdi b6o", Tan @p chi hoic sdch, tap,lso), cacs6 trang (gach ngang gifta2 chfi s6).
s.Hinh thric trinh bdy:- Ngodi.phAn ti€u dC, t6c gihvdt6m t6t bdi b6o (ddu trangl) vd Summary lcutii bai;,
bdi b6o yOu cAu phii trinh bdy tr6n kh6 ,A.4 theo chiAu dgc, dugc 'chia
02 cQt v6i c6c th6ngsd PageSetup cg th€ nhu sau:Top:3.1cm, Bottom: 3.lcm, Left: 3.0cm, Right: 2.Bcm,Header: 2.85cm, Footer: 2.85cm, With7.25cm, Spacing:0.8cm. TOn bdi b6o cd 12, cht indOm; nQi dung bdi b6o cd I 1; F-ont chfr Unicode; hinh vE, dO thi trinh bdy phu hqrp v6i dQrQng cQt q .25 cm); ciic b6ng bi€u qry lcrn trinh. bdy theo trang ngang (Landicape).-
- D6i vcvi c6c bdi b6o thC hien bdng cric ph6n m6m chuyOn OU"g nh* Latex, ACD/ChemSketch ho{c Science Helper for Word cfing trinh bdy theo khu6n dqng n6u tr6n.
6. N6u bdi brio khdng duo. c sri dgng, Ban bi6n tfp kh6ng tra lai ban thio., 7.Tfc gi6 ho4c tdc gih chinh trong nh6m tfrc giit c6n ghi dfa chi, sO eien thoai vdo
cu6i bdi dC 1i6n lpc.
BAN BIEN TAP