speed estimation for induction motor using neural networks ... · dimensionamento de motores de...
TRANSCRIPT

1Abstract— This work presents an alternative approach based on neural network method in order to estimate speed of induction motors, using the measurement of primary variables such as voltage and current. Induction motors are very common in many sectors of the industry and assume an important role in the national energy policy. The nowadays methodologies, which are used in diagnosis, condition monitoring and dimensioning of these motors, are based on measure of the speed variable. However, the direct measure of this variable compromises the system control and starting circuit of an electric machinery, reducing its robustness and increasing the implementation costs. Simulation results and experimental data are presented to validate the proposed approach.
Keywords— Three-phase induction motors, speed estimator, artificial neural networks.
I. INTRODUÇÃO
MOTOR de Indução Trifásico (MIT) é usado em diversos setores industriais, sendo o principal elemento
para converter energia elétrica em mecânica motriz. Suas principais características se fundamentam no baixo custo de manutenção e implementação, além da sua robustez [1].
As aplicações dos MITs podem ser divididas em dois grandes grupos [2],[3]. No primeiro, o motor trabalha sem controle de velocidade em seu regime de operação. No segundo, os processos em que os motores estão acoplados necessitam da aplicação de uma metodologia de controle seja escalar ou vetorial. Assim, a velocidade no eixo do MIT é o parâmetro fundamental em diversas aplicações.
A velocidade no eixo do MIT pode ser medida através de encoders ópticos, resolvers eletromagnéticos ou taco-geradores baseados em motores de corrente contínua sem escovas. Entretanto, estes dispositivos eletromecânicos apresentam algumas limitações em suas aplicações, tais como o aumento do custo do equipamento de acionamento, redução da robustez mecânica, imunidade baixa a ruídos, alteração da
1 Os autores agradecem ao CNPq pelo apoio financeiro (Processo 474290/2008-5, 473576/2011-2, 552269/2011-5) e Fundação Araucária (Processo 06/56093-3).
A. Goedtel, Universidade Tecnológica Federal do Paraná - UTFPR-CP, Cornélio Procópio, PR, Brasil, [email protected]
S. A. O da Silva, Universidade Tecnológica Federal do Paraná - UTFPR-CP, Cornélio Procópio, PR, Brasil, [email protected]
I. N. Silva, Universidade de São Paulo - USP, São Carlos, SP, Brasil, [email protected]
P. J. A. Serni, Universidade Estadual Paulista - UNESP-FEB, Bauru, SP, Brasil, [email protected]
M. Suetake, Universidade de São Paulo - USP, São Carlos, SP, Brasil, [email protected]
C. F. Nascimento, Universidade Federal do ABC - UFABC, Santo André, SP, Brasil, [email protected]
inércia da máquina, além de exigir especial atenção em ambientes hostis [4].
Uma alternativa para se determinar a velocidade de rotor dos motores é obtida por meio do uso da técnica sensorless [4],[5]. Esta técnica é encontrada em aplicações de alto desempenho como Controle Vetorial (CV) e Controle Direto de Torque (CDT), bem como na identificação de falhas, monitoramento da eficiência energética, acionamento e dimensionamento de motores de indução trifásicos, pois substitui o uso do sensor de velocidade por estimadores.
No trabalho apresentado em [6], é descrito um conjunto de técnicas de manutenção preventiva em motores de indução trifásicos. A velocidade no eixo dos motores é estimada para determinar a eficiência do conjunto motor-carga.
Em [7] é proposto um método para identificar o desgaste de rolamentos através das medidas das correntes do estator e a estimativa de velocidade do eixo. No artigo [8] é apresentada uma técnica para determinar, de forma online, a quebra das barras do rotor utilizando transformada Wavelet e Rede Neural Artificial (RNA). Os autores de [8] usam a medida da velocidade como variável de entrada para detectar a quebra de barras no enrolamento de rotor. No trabalho [9], os autores apresentam metodologias que utilizam a variável escorregamento (s) para determinar problemas de excentricidade no eixo do rotor, barras do rotor rompidas bem como falhas no enrolamento de estator.
No artigo [10] é descrito um conjunto de estratégias para análise do dimensionamento de motores de indução trifásicos em regime permanente e transitório. O autor utiliza as medidas de corrente e velocidade para determinar a eficiência de cada conjunto motor-carga.
Artigos recentes têm usado as RNAs como uma ferramenta eficaz na estimativa de parâmetros e monitoramento de máquinas elétricas. O artigo [11] utiliza as RNAs para estimar a resistência de estator aplicado ao controle por orientação de campo indireto. No trabalho [12], uma RNA Perceptron Multicamadas (PMC) atua como um classificador de falhas em motores de indução trifásicos.
A utilização de RNAs na estimação de parâmetros do MIT possibilitará a inserção destes motores nas futuras redes elétricas inteligentes (Smart Grids), pois facilitará a transmissão de dados entre o motor e o sistema [13], [14].
A proposta deste artigo consiste em apresentar uma metodologia alternativa para estimativa de velocidade do motor de indução trifásico baseado em RNAs com alimentação senoidal, considerando problemas de qualidade da energia elétrica [15] como diminuição ou elevação da tensão nominal simétrica numa grande faixa de operação do
Speed Estimation for Induction Motor Using Neural Networks Method
A. Goedtel, I. N. Silva, Member, IEEE, P. J. A. Serni, M. Suetake, C. F. Nascimento and S. A. O. da Silva
O
768 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 2, MARCH 2013
conjugado de carga, no transitório e no regime permanente. O estágio de treinamento das RNAs segue o método bi-validação cruzada, o qual é baseada em duas fases de validação: inicialmente dados de simulação e um segundo processo de validação utilizando dados experimentais [16].
A organização deste trabalho segue a seguinte ordem: na Seção II são apresentados aspectos da modelagem do motor de indução trifásico; na Seção III são relatados os princípios envolvidos com as RNAs; na Seção IV a bancada de ensaios experimentais é apresentada e, na Seção V, são apresentados resultados de simulação e de experimentos obtidos na bancada de ensaios. Finalmente, na Seção VI, as conclusões são apresentadas.
II. MODELAGEM DO MOTOR DE INDUÇÃO TRIFÁSICO
Para treinar uma RNA precisa-se compilar um conjunto de padrões de entrada e saída com o objetivo do ajuste dos parâmetros internos da RNA (pesos sinápticos). Este procedimento é conhecido como processo de treinamento e se deve assegurar que a RNA é exposta às seqüências de padrões que descrevam de forma adequada o comportamento do sistema analisado [16].
Com o propósito de gerar os padrões de treinamento para estimativa de velocidade do motor de indução, quando em diferentes situações de carga e tensão de alimentação, realizou-se várias simulações do modelo matemático do MIT usando a ferramenta Matlab/Simulink.
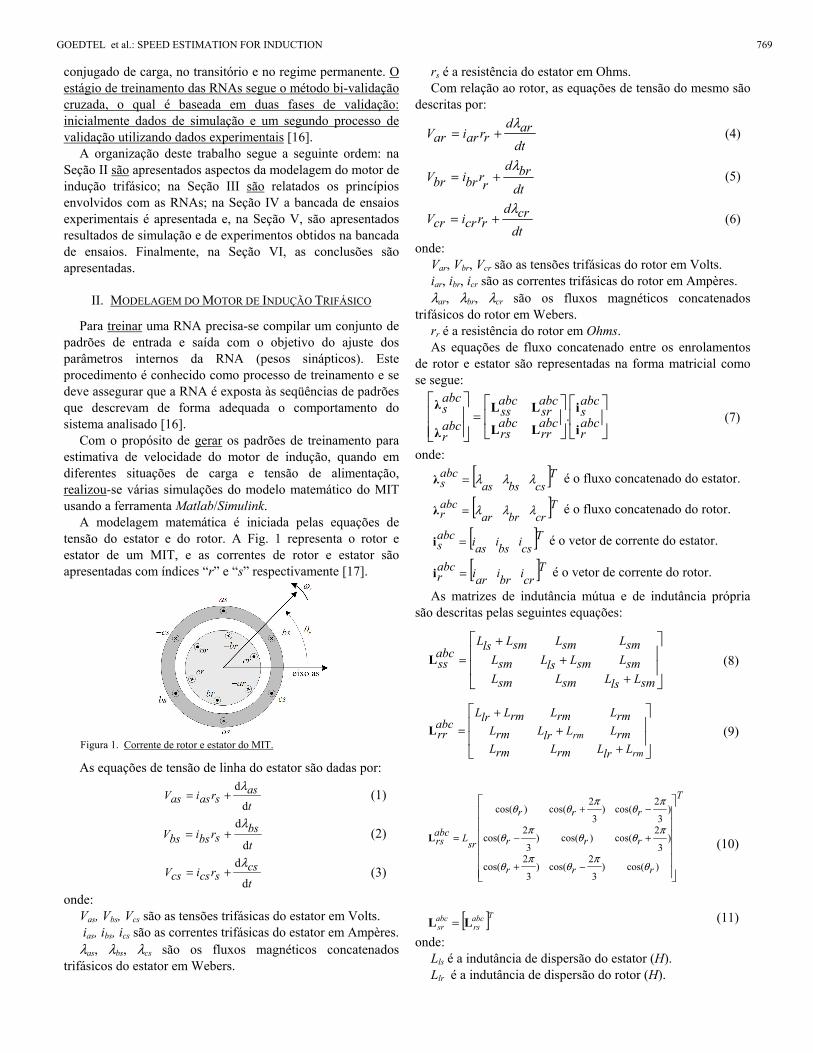
A modelagem matemática é iniciada pelas equações de tensão do estator e do rotor. A Fig. 1 representa o rotor e estator de um MIT, e as correntes de rotor e estator são apresentadas com índices “r” e “s” respectivamente [17].
Figura 1. Corrente de rotor e estator do MIT.
As equações de tensão de linha do estator são dadas por:
t
assrasiasV
d
dλ+= (1)
t
bssrbsibsV
d
dλ+= (2)
t
cssrcsicsV
d
dλ+= (3)
onde: Vas, Vbs, Vcs são as tensões trifásicas do estator em Volts. ias, ibs, ics são as correntes trifásicas do estator em Ampères. λas, λbs, λcs são os fluxos magnéticos concatenados
trifásicos do estator em Webers.
rs é a resistência do estator em Ohms. Com relação ao rotor, as equações de tensão do mesmo são
descritas por:
dt
ardrrariarV
λ+= (4)
dt
brd
rrbribrV
λ+= (5)
dt
crdrrcricrV
λ+= (6)
onde: Var, Vbr, Vcr são as tensões trifásicas do rotor em Volts. iar, ibr, icr são as correntes trifásicas do rotor em Ampères. λar, λbr, λcr são os fluxos magnéticos concatenados
trifásicos do rotor em Webers. rr é a resistência do rotor em Ohms. As equações de fluxo concatenado entre os enrolamentos
de rotor e estator são representadas na forma matricial como se segue:
= abc
r
abcs
abcrr
abcrs
abcsr
abcss
abcr
abcs
i
i
LL
LL
λ
λ. (7)
onde:
[ ]Tcsbsas
abcs λλλ =λ é o fluxo concatenado do estator.
[ ]Tcrbrar
abcr λλλ =λ é o fluxo concatenado do rotor.
[ ]Tcs
ibsi
asiabc
s =i é o vetor de corrente do estator.
[ ]Tcr
ibri
ariabc
r =i é o vetor de corrente do rotor.
As matrizes de indutância mútua e de indutância própria são descritas pelas seguintes equações:
++
+=
smLlsLsmLsmLsmLsmLlsLsmLsmLsmLsmLlsL
abcssL (8)
++
+=
rm
rm
LlrLrmLrmLrmLLlrLrmLrmLrmLrmLlrL
abcrrL (9)
T
rrr
rrr
rrr
srLabc
rs
−+
+−
−+
=
)cos()3
2cos()
3
2cos(
)3
2cos()cos()
3
2cos(
)3
2cos()
3
2cos()cos(
θπ
θπ
θ
πθθ
πθ
πθ
πθθ
L
(10)
[ ]Tabcrs
abcsr LL = (11)
onde: Lls é a indutância de dispersão do estator (H). Llr é a indutância de dispersão do rotor (H).
GOEDTEL et al.: SPEED ESTIMATION FOR INDUCTION 769
Lss é a indutância própria de estator (H). Lrr é a indutância própria de rotor (H). Lsm é a indutância mútua de estator (H). Lrm é a indutância mútua de rotor (H). Lsr é a indutância mútua entre rotor e estator (H). Desconsiderando as perdas no ferro, é possível expressar
estas indutâncias em termos do número de espiras dos enrolamentos de rotor e estator, e a permeância do entreferro. As relações entre as indutâncias são expressas pelas seguintes equações:
gPsNssL 2= (12)
=
3
2cos2 π
gPsNsmL (13)
gPrNsNsrL = (14)
gPrNrrL 2= (15)
onde: Pg é a permeância magnética. Ns e Nr são os números de espiras no enrolamento do rotor
e estator, respectivamente. Uma máquina idealizada é descrita por seis equações
diferenciais de primeira ordem, uma para cada enrolamento. Estas equações são acopladas devido às indutâncias mútuas entre os enrolamentos. Em particular, os termos de acoplamento entre rotor e estator são em função da posição do rotor. À medida que o rotor gira, estes termos de acoplamento variam com o tempo. Transformações matemáticas, tais como Park (qd0) e Clark (ab0), facilitam o cálculo da solução transitória, transformando as equações diferenciais variantes no tempo em equações de indutâncias constantes [18].
Conforme descrito em [19], a transformação de coordenadas consiste em referenciar as variáveis do motor (tensão, corrente e fluxo eletromagnético) descrito num sistema original para outro sistema de coordenadas, o qual será tomado como referência. A fundamentação deste processo está baseada no princípio da similaridade eletromagnética. A possibilidade de reproduzir o fluxo magnético no entreferro, bem como a distribuição de correntes no rotor e estator no sistema de coordenadas adotado como referência, tem o mesmo efeito do sistema de coordenadas original.
Destas equações é possível simular o comportamento elétrico e mecânico do motor de indução trifásico. O objetivo do presente equacionamento é simular o comportamento do motor da partida ao regime permanente. Sendo este período extremamente curto não serão então consideradas variações térmicas as quais a máquina fica submetida.
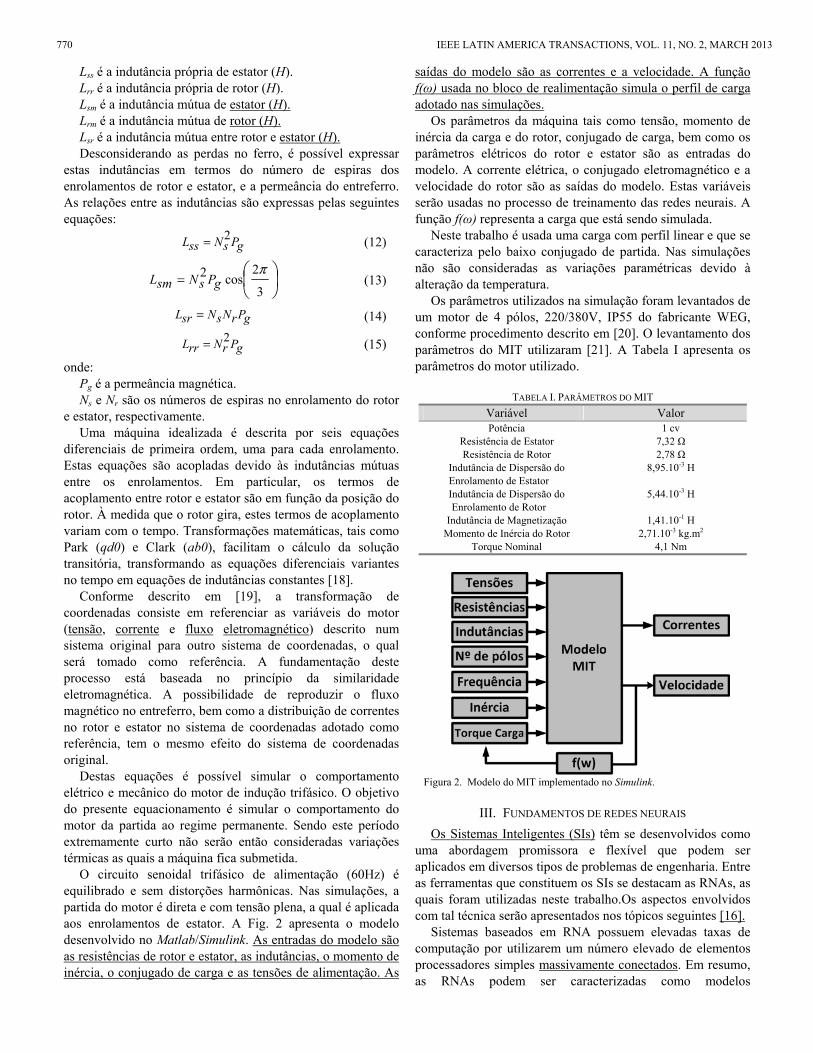
O circuito senoidal trifásico de alimentação (60Hz) é equilibrado e sem distorções harmônicas. Nas simulações, a partida do motor é direta e com tensão plena, a qual é aplicada aos enrolamentos de estator. A Fig. 2 apresenta o modelo desenvolvido no Matlab/Simulink. As entradas do modelo são as resistências de rotor e estator, as indutâncias, o momento de inércia, o conjugado de carga e as tensões de alimentação. As
saídas do modelo são as correntes e a velocidade. A função f(ω) usada no bloco de realimentação simula o perfil de carga adotado nas simulações.
Os parâmetros da máquina tais como tensão, momento de inércia da carga e do rotor, conjugado de carga, bem como os parâmetros elétricos do rotor e estator são as entradas do modelo. A corrente elétrica, o conjugado eletromagnético e a velocidade do rotor são as saídas do modelo. Estas variáveis serão usadas no processo de treinamento das redes neurais. A função f(ω) representa a carga que está sendo simulada.
Neste trabalho é usada uma carga com perfil linear e que se caracteriza pelo baixo conjugado de partida. Nas simulações não são consideradas as variações paramétricas devido à alteração da temperatura.
Os parâmetros utilizados na simulação foram levantados de um motor de 4 pólos, 220/380V, IP55 do fabricante WEG, conforme procedimento descrito em [20]. O levantamento dos parâmetros do MIT utilizaram [21]. A Tabela I apresenta os parâmetros do motor utilizado.
TABELA I. PARÂMETROS DO MIT
Variável Valor Potência 1 cv
Resistência de Estator 7,32 Ω Resistência de Rotor 2,78 Ω
Indutância de Dispersão do Enrolamento de Estator
8,95.10-3 H
Indutância de Dispersão do Enrolamento de Rotor
5,44.10-3 H
Indutância de Magnetização 1,41.10-1 H Momento de Inércia do Rotor 2,71.10-3 kg.m2
Torque Nominal 4,1 Nm
Figura 2. Modelo do MIT implementado no Simulink.
III. FUNDAMENTOS DE REDES NEURAIS
Os Sistemas Inteligentes (SIs) têm se desenvolvidos como uma abordagem promissora e flexível que podem ser aplicados em diversos tipos de problemas de engenharia. Entre as ferramentas que constituem os SIs se destacam as RNAs, as quais foram utilizadas neste trabalho.Os aspectos envolvidos com tal técnica serão apresentados nos tópicos seguintes [16].
Sistemas baseados em RNA possuem elevadas taxas de computação por utilizarem um número elevado de elementos processadores simples massivamente conectados. Em resumo, as RNAs podem ser caracterizadas como modelos
770 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 2, MARCH 2013

computacionais, com propriedades particulares, cujas principais características são definidas como segue: (i) capacidade intrínseca de operação em paralelo; (ii) não há a necessidade de conhecimento a priori de eventuais modelos matemáticos que descrevem o comportamento de determinada aplicação; (iii) sistemas inspirados no cérebro humano; (iv) habilidade de aprender a partir da experiência.
A arquitetura das RNAs utilizada no desenvolvimento deste trabalho é a rede Perceptron Multicamadas (PMC). Uma descrição sucinta dessa arquitetura e algoritmos de treinamento são apresentados nas próximas sub-seções.
A. Rede Perceptron multicamadas
A rede PMC é aquela em que os neurônios são organizados em camadas. A característica principal das redes em camadas é a presença de uma ou mais camadas escondidas, as quais são responsáveis pela extração e armazenamento de conhecimentos associados a alguma aplicação específica.
Neste tipo de rede, o fluxo de dados (informações) das entradas para as saídas segue estritamente em uma única direção, isto é, existem apenas ligações entre as saídas dos nós de um nível inferior para as entradas dos nós de um nível superior, não existindo conexões entre os elementos de um mesmo nível. Redes em camadas são utilizadas em várias aplicações, tais como: aproximação de funções, reconhecimento de padrões, otimização de sistemas, controle de processos, entre outras [22]. A ilustração de uma rede PMC com duas camadas escondidas é apresentada na Fig. 3.
Figura 3. A arquitetura da rede PMC.
A partir da Fig. 3, observa-se que os nós da camada de entrada da rede fornecem as informações (vetores de entrada), as quais constituem os sinais de entrada, que serão aplicados aos neurônios da segunda camada (1a camada neural). Os sinais de saída da segunda camada são utilizados como entradas para a terceira camada (2a camada neural). Finalmente, o conjunto de sinais de saída apresentados pelos neurônios da camada de saída reflete a resposta final da rede em relação ao vetor de entrada fornecido pelos nós fontes da primeira camada.
O treinamento ou processo de aprendizagem de uma rede neural artificial consiste em ajustar os pesos sinápticos (matriz de pesos W) de forma que a aplicação de um conjunto de entradas produza um conjunto de saídas desejadas.
B. Algoritmos de treinamento
O treinamento supervisionado das RNAs que formam a rede Perceptron utilizadas neste trabalho é baseado no algoritmo de aprendizagem backpropagation [22].
Apresenta-se à rede um vetor de entrada (exemplo) que é propagado camada a camada. A saída produzida pela rede é então comparada com a saída desejada para o respectivo vetor de entrada, e a diferença entre ambas as saídas é calculada e o erro de saída da rede é então produzido. O gradiente local deste erro é retropropagado com o objetivo de ajustar os pesos sinápticos de forma que a saída produzida pela rede esteja próxima da saída desejada. Este processo é repetido para todos os vetores de entrada da rede até que o erro quadrático médio das saídas da rede esteja num valor aceitável.
A derivação do algoritmo backpropagation para redes Perceptron com uma única camada escondida é realizada conforme a notação apresentada na Fig. 4.
Figura 4. Diagrama esquemático da rede PMC.
A partir da Fig. 4, adota-se a seguinte convenção: i) O parâmetro N especifica o número de variáveis que
constitui cada vetor de entrada. ii) O parâmetro N1 especifica a quantidade de neurônios
utilizados na camada neural escondida. iii) O parâmetro N2 especifica o número de variáveis que
constitui cada vetor de saída, e também indica a quantidade de neurônios utilizados na camada neural de saída.
iv) O vetor x = [x1, x2,..., xN]T é o vetor de entrada da rede. v) O vetor y = [y1, y2,...,yN2]
T é o vetor de saída da rede. vi) O símbolo Wlji fornece o valor do peso sináptico
conectando ao j-ésimo neurônio da camada (l) ao i-ésimo neurônio da camada (l-1).
vii) O símbolo Ilj fornece o valor correspondente à entrada ponderada do j-ésimo neurônio da camada (l), ou seja:
1...1;110
NjxIN
iijij =⋅=
=W
(16)
2...11221
0
NjIN
iijij =⋅=
=
yW (17)
viii) O símbolo ylj fornece o valor correspondente à saída do
j-ésimo neurônio da camada (l), ou seja: y1j = g(I1j) ; j = 1..N1 (18) y2j = g(I2j) ; j = 1..N2 (19)
As funções Erro Quadrático E(k) e Erro Quadrático Médio EM, as quais são utilizadas como critérios de
GOEDTEL et al.: SPEED ESTIMATION FOR INDUCTION 771

desempenho e de parada do processo de treinamento são definidas por:
a) Erro Quadrático Esta função fornece o valor instantâneo da soma dos erros
quadráticos de todos os neurônios da camada de saída da rede em relação ao k-ésimo padrão de treinamento, ou seja:
22
1
))(2)((2
1)(
=−=
N
jjj kykdkE (20)
onde dj(k) é o valor da saída desejada do neurônio j em relação ao k-ésimo padrão de entrada.
b) Erro Quadrático Médio O erro quadrático médio é obtido a partir da soma dos erros
quadráticos relativos a todos os padrões de entrada utilizados no conjunto de treinamento da rede, ou seja:
=
=p
kM kE
pE
1
)(1 (21)
onde o parâmetro p especifica o número de padrões de treinamento ou a quantidade de vetores de entrada.
Assim, o objetivo do processo de aprendizagem, utilizando o algoritmo backpropagation, consiste em ajustar as matrizes de pesos W1 e W2 da rede a fim de minimizar a função EM. O processo de ajuste dos pesos pode ser dividido em duas fases como descrito a seguir:
a) Ajuste dos pesos dos neurônios da camada de saída O ajuste dos pesos dos neurônios da camada de saída (2a
camada neural) é feito a partir da minimização da função erro quadrático em relação aos pesos W2ji. Utilizando a regra da diferenciação em cadeia, tem-se:
ji
j
j
j
jjiW W
I
I
y
y
E
W
EE
ji 2
2
2
2
22)2( ∂∂
⋅∂∂
⋅∂∂=
∂∂=∇ (22)
iji
j yW
I1
2
2=
∂∂
(23)
)2('2
2j
j
j IgI
y=
∂∂
(24)
)2(2 jj
j
ydy
E −−=∂∂ (25)
Substituindo (23), (24) e (25) em (22), obtém-se:
ijjjji
yIgydW
E1)2(')2(
2⋅⋅−−=
∂∂ (26)
Logo, o ajuste deverá ser feito na direção oposta ao gradiente, a fim de minimizar a função erro quadrático, ou seja:
jiji W
EW
22
∂∂⋅−=Δ η
ijji yW 122 ⋅⋅−=Δ δη (27)
ou ainda:
ijji
jijiji
ytW
tWtWtW
12)1(2
)(2)1(2)1(2
⋅⋅−+=
Δ++=+
δη (28)
onde η é uma constante que determina a taxa de aprendizagem
do algoritmo backpropagation, e δ2j denota o gradiente local sendo auto-definido por:
)2(')2(2 jjjj Igyd ⋅−−=δ (29)
b) Ajuste dos pesos dos neurônios da camada intermediária O ajuste dos pesos dos neurônios da camada intermediária
(1a camada neural) é feito normalmente a partir da função erro quadrático em relação aos pesos W1ji. Utilizando a regra de diferenciação em cadeia, tem-se:
ji
j
j
j
jjiW W
I
I
y
y
E
W
EE
ji 1
1
1
1
11)1( ∂∂
⋅∂∂
⋅∂∂=
∂∂=∇ (30)
iji
j xW
I=
∂∂
1
1 (31)
)1('1
1j
j
j IgI
y=
∂∂ (32)
= ∂
∂⋅
∂∂=
∂∂ 2
1 1
2
21
N
k j
k
kj y
I
I
E
y
E (33)
=
⋅∂∂=
∂∂ 2
1
221
N
kkj
kj
WI
E
y
E (34)
Inserindo o resultado da multiplicação de (32) por (33) em (34), tem-se:
=
⋅−=∂∂ 2
1
221
N
kkjk
j
Wy
E δ (35)
Substituindo (30), (31) e (32) em (29), tem-se:
ij
N
kkjk
j
xIgE ⋅⋅⋅−=
∂∂
=)1(')22(
1
2
1
WW
δ (36)
O ajuste deve ser feito na direção oposta ao gradiente. Então, a Equação (36) torna-se:
jiji W
EW
11
∂∂⋅−=Δ η
ijji xW ⋅⋅−=Δ 11 δη (37)
ou ainda:
ijjiji xtWtW ⋅⋅+=+ 1)(1)1(1 δη (38)
onde δ1j denota o gradiente local e é auto-definido por:
)22()1('12
1
=⋅⋅=
N
kkjkjj Ig Wδδ (39)
Assim, aplicam-se as Fases 1 e 2 sequencialmente, até que o erro quadrático médio da rede atinja um valor aceitável que é estipulado em função de cada aplicação específica.
Na área de pesquisa em máquinas elétricas, o uso de RNAs tem sido tema de pesquisas recentes. São vários os enfoques, tais como controle, estimativa de parâmetros e detecção de falhas, bem como determinação do comportamento de carga em regime permanente [8], [11]-[13], [23], [24].
Assim, uma das propostas principais deste trabalho consiste em utilizar RNAs como ferramentas alternativas no processo de medida indireta de velocidade em motores de indução trifásicos a exemplo das pesquisas recentes.
Mais especificamente, propõem-se uma multi-estrutura neural dividida por faixas de tensão onde se obtém maior
772 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 2, MARCH 2013

flexibilidade e modularidade para operar em diversas condições de alimentação da máquina [16].
O processo de validação cruzada foi utilizado neste trabalho para determinar a menor estrutura neural com menor erro de generalização na estimativa de velocidade dos motores de indução trifásico com entradas de tensão e corrente [16].
Para a experimentação das propostas apresentadas neste artigo utiliza-se uma estrutura de ensaios de máquinas elétricas e seu detalhamento é apresentado na próxima seção.
IV. ESTRUTURA DOS ENSAIOS EXPERIMENTAIS
O projeto e o desenvolvimento de uma estrutura de testes de máquinas elétricas se configuram necessários para validar os modelos teóricos em diversas investigações científicas. Em [9] também é feita a descrição sistemática da montagem de tal sistema, possibilitando a reprodução da estrutura em outros centros de pesquisa.
A montagem da bancada de testes e a descrição de suas caracterísiticas são partes importantes deste artigo, pois as mesmas possibilitaram a aquisição de todos os sinais que envolvem a dinâmica das máquinas elétricas, tais como corrente, tensão, torque e velocidade do motor, tanto em regime transitório como permanente. Esta montagem implica na utilização de equipamentos que possibilitem essas medidas, tais como: placa de aquisição de dados, sensores e transdutores para as variáveis a serem medidas, motores elétricos, chaves, cabos, fusíveis, dentre outros. A Fig. 5 ilustra o diagrama em blocos da estrutura de ensaios proposta neste artigo.
Figura 5. Diagrama em blocos da bancada de testes.
O diagrama em blocos tem como início a fonte de alimentação trifásica (RST) como o primeiro bloco, seguido dos fusíveis de proteção e de um contator, como chave geral, acoplado a um relê térmico. As três fases são ligadas a três reguladores de tensão monofásicos (variacs). Assim, através destes componentes, é possível simular a variação da tensão da rede e o desequilíbrio entre as fases. Em seguida, no acionamento do quadro, o usuário deve fazer uma escolha: i) acionamento direto com tensão senoidal trifásica; ou ii) acionamento por inversor de freqûencia. A saída de ambas é ligada a um barramento, o qual é monitorado por sensores Hall de tensão e corrente. Ainda, o usuário pode escolher o acionamento estrela-triângulo do motor.
O MIT é ligado, por meio de seu eixo, a um gerador CC de excitação independente. Esta estratégia é amplamente utilizada
e descrita na literatura consultada [25-28]. Entre as duas máquinas é acoplado o sensor de torque girante, ou torquímetro girante, que mede a força imposta pelo gerador CC ao MIT. O motor trifásico pode, facilmente, ser substituído por um monofásico sem perda de generalidade e ampliando as possibilidades de aplicações da estrutura proposta. A carga do gerador CC é formado por um conjunto de resistências, ligadas ao enrolamento de armadura. O campo é alimentado por uma fonte CC, cuja variação da tensão é imposta pelo regulador de tensão monofásico.
Ao MIT é acoplado um encoder óptico como dispositivo para medida de velocidade e os sensores Hall ligados ao barramento de alimentação para medidas de tensão e corrente. A corrente nominal deste dispositivo é de 25A. O condicionamento de sinal é realizado utilizando-se o amplificador operacional TL081 com ajuste de offset.
A Fig. 6 ilustra a bancada de ensaios. O bloco de refrigeração é composto por um motor de indução trifásico de 1/3 cv, no qual está acoplado um ventilador. A entrada de ar é filtrada por meio de fibra sintética. Este dispositivo tem por finalidade o arrefecimento do calor gerado na máquina CC. O seu acionamento é obtido de forma independente com uma chave no painel de comando. Tem como inconveniente o ruído gerado nos ensaios.
(a)
(b)
Figura 6. Visão geral da (a) bancada de ensaios e (b) das máquinas.
V. ESTIMADOR DE VELOCIDADE USANDO REDES NEURAIS
As aplicações de motores de indução trifásicos podem ser divididas em dois grandes grupos; sendo o primeiro aquele em que não há controle de velocidade e o segundo onde técnicas de controle são utilizadas. A abordagem deste trabalho está inserida no contexto do primeiro grupo e se propõe um método para estimar velocidade do MIT em regime senoidal de alimentação.
A proposta está então focada em apresentar um modelo baseado em RNAs para a estimativa da velocidade no eixo do motor de indução através de medidas primárias de tensão e
GOEDTEL et al.: SPEED ESTIMATION FOR INDUCTION 773

corrente e validado por simulações e dados experimentais.
A. Metodologia
A metodologia proposta neste trabalho é ilustrada na Fig. 7. Este diagrama em blocos ilustra uma estrutura formada entre modelagem e experimentação tendo os passos numerados de 1 a 12.
Figura 7. Diagrama em blocos da metodologia.
A fase inicial consiste em modelar a máquina de indução (passo 2), conforme descrito na Seção III. A simulação do modelo do MIT gera os dados de treinamento e os dados de teste da estrutura neural proposta (passos 4, 5 e 6). Em seguida, a RNA é treinada (passo 7) com o algoritmo backpropagation descrito na Seção III. A cada rede neural artificial treinada são apresentados os dados de teste (gerados no passo 4 e armazenados no passo 6). Desta forma, realiza-se o processo de validação da estrutura neural verificando-se o erro entre o valor real e o valor estimado. Este processo é chamado de validação cruzada (crossvalidation) sendo descrito nos passos 8 e 9 da Fig. 7.
Em seguida, propõe-se o teste da estrutura neural, treinada e validada por dados de simulação, com dados experimentais. Os dados são coletados na estrutura de ensaios de máquinas elétricas, conforme passos 1 e 3. A taxa de aquisição dos sinais experimentais foi de 6 k amostras/segundo. Os dados experimentais são apresentados à rede neural artificial previamente treinada com dados de simulação e observam-se os resultados de generalização (passos 10, 11 e 12).
É importante ressaltar que a metodologia proposta neste trabalho considera um primeiro processo de validação através de dados simulados e em seguida com dados experimentais. Na literatura são encontrados processos de treinamento e validação cruzada envolvendo máquinas elétricas com dados gerados a partir de modelos ou dados gerados experimentalmente.
A pré-validação, com dados simulados e pós-validação com dados experimentais, utilizada foi apresentada em [16], validando a estrutura neural para estimativa de velocidade com dados de simulação e dados experimentais, denominada
de bi-validação cruzada.
B. Simulação
Os dados de simulação gerados a partir do modelo do MIT, descrito na Seção II, forneceu os dados necessários à fase de treinamento da estrutura neural. Os dados de entrada da rede PMC são os valores eficazes (Root Mean Square - RMS) de tensão e corrente de linha da alimentação do MIT. A saída da rede é a velocidade. A Fig. 8 ilustra a estrutura de treinamento proposta, onde N1 e N2 são os neurônios da primeira camada escondida e da segunda camada escondida, respectivamente.
A Fig. 9 apresenta o procedimento de simulação para uma carga com perfil linear. Tal carga apresenta um aumento do conjugado de carga com o incremento da velocidade de forma linear, sendo bastante encontrada em aplicações como moinhos de rolos, bombas de pistão e serras para madeira. Estabelece-se um conjugado inicial de 5% do conjugado nominal, simulando assim, o torque inicial exigido da carga para superar as perdas por atrito em mancais e rolamentos numa máquina real.
Quando o conjugado de carga se iguala ao conjugado eletromagnético a máquina entra em regime permanente. A partir deste ponto desaparecem as diferenças entre os perfis de carga e descreve-se o estado apenas como regime permanente enquanto não houver alteração de conjugado no eixo ou na tensão de alimentação.
Figura 8. Estrutura de treinamento e teste da RNA.
As curvas C1 a C26 apresentadas na Fig. 9 representam diferentes valores de carga em diversas situações de operação. A curva C26 representa um baixo conjugado em regime permanente e a curva C1 um alto conjugado. Estas diferenças de conjugado simulam diversas cargas aplicadas a uma mesma máquina.
774 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 2, MARCH 2013

Figura 9. Curvas de simulação do MIT as quais representam as diversas situações de carga e a faixa de tensão de operação (NBR7094/1996). Assume-se neste trabalho uma variação na alimentação do
MIT de –9,09% a +9,09% em relação ao valor nominal. O objetivo da variação de alimentação nos terminais do motor de indução é submeter o mesmo às condições severas em termos de alimentação ou de mau dimensionamento da rede elétrica em ambientes industriais. A faixa de variação está inserida no contexto da norma NBR7094/1996 que admite uma variação de –10% a +10%. Com isso, tem-se a divisão da estrutura neural que estima a velocidade em cinco faixas distintas. A Tabela II apresenta a faixa de variação de tensão utilizada neste trabalho.
Conforme descrito na Tabela II, nas faixas 2, 3 e 4, os limites inferior e superior da faixa de operação é inserido na camada anterior e posterior, respectivamente, em 2 Volts. Tem-se com isso a informação no treinamento da estrutura neural relativo ao limite de cada faixa e os mínimos e máximos das faixas, que se seguem e antecedem.
Cada faixa de tensão possui uma RNA associada com características idênticas, tais como número de neurônios e funções de ativação. Entretanto, cada rede é treinada numa faixa de operação de tensão e a seleção desta é feita conforme o nível de tensão eficar da rede trifásica.
TABELA II FAIXAS DE TENSÃO E ÍNDICE DA ESTRUTURA NEURAL.
Índice da Estrutura Faixa de Tensão
1 200 - 206 V 2 204 - 216 V 3 214 - 226 V 4 224 - 236 V 5 234 - 240 V
C. Resultados de simulação
Resultados de simulação são apresentados nesta sub-seção. Deve ser ressaltado que os dados de teste de tensão e corrente não participaram do processo de treinamento da estrutura neural. A saída da rede apresenta a estimativa de velocidade no eixo do MIT. Os resultados de simulação demonstram a capacidade da estrutura neural em aprender com os padrões de treinamento e generalizar soluções. O tempo de simulação é de 1 segundo e reproduz o comportamento da máquina do transitório ao regime permanente.
Os conjugados de carga em regime permanente foram divididos em três valores; a saber: 1 Nm, 3 Nm e 5 Nm. Desta
forma, em termos computacionais, simula-se a operação de motores superdimensionados e subdimensionados em operação nos diversos setores produtivos. Cabe ressaltar que o conjugado nominal do motor em questão é de 4,1 Nm, conforme descrito na Tabela I.
A Fig. 10 apresenta os resultados de generalização da RNA treinada na primeira faixa de tensão descrito na Tabela II e submetido a um conjugado resistente de 3 Nm.
Na Fig. 11 o MIT foi submetido a um conjugado resistente de 5 Nm, com tensões na faixa 3 da Tabela II. Deve ser ressaltado que esta faixa de operação é de grande interesse, pois se encontra no entorno da tensão nominal da máquina de indução; a saber, 220 V. Os resultados de simulação apresentados nesta sub-seção confirmam o uso das RNAs para estimar a velocidade no eixo dos motores de indução, a partir de variáveis primárias como tensão e corrente, quando submetido a diferentes cargas e uma ampla faixa de tensão. O erro médio mínimo foi de 1,02% e máximo de 3,46%.
A estimativa de velocidade, gerada a partir de dados de simulação do modelo dinâmico do MIT, utilizou 5 neurônios na primeira camada escondida, 10 neurônios na segunda camada escondida e um neurônio na camada de saída. A função de ativação da primeira camada escondida e da segunda camada escondida é a tangente hiperbólica enquanto que a da camada de saída é a função linear.
Figura 10. Estimativa de velocidade na faixa 1 (200 - 206 V) e 3 Nm de conjugado de carga em regime permanente.
10 20 30 40 50 60 70 80 90 1000
20
40
60
80
100
120
140
160
180
200Estimativa de Velocidade: 214V - 226V
Amostras
Velo
cida
de (r
ad/s
)
Velocidade (em regime: 178,1 rad/s)Velocidade Estimada
Figura 11. Estimativa de velocidade na faixa 3 (214 - 226 V) e 5 Nm de conjugado de carga em regime permanente.
1) Resultados Experimentais Os processos de validação cruzada (crossvalidation),
aplicados à estimativa de parâmetros em máquinas elétricas, utilizam a mesma origem dos dados de treinamento. Assim, se
GOEDTEL et al.: SPEED ESTIMATION FOR INDUCTION 775

os dados de treinamento da estrutura neural são obtidos por simulação computacional, então o processo de validação cruzada usa também dados simulados. Por outro lado, se os dados de treinamento são de origem experimental, então o processo de validação ocorre com dados igualmente experimentais.
O método alternativo proposto neste trabalho, chamado de bi-validação cruzada modificado, considera dados de simulação e experimentais no treinamento e apenas dados experimentais no teste de generalização. Os dados experimentais coletados na estrutura de ensaios são agora apresentados à estrutura neural para as diversas faixas de tensão explicitadas na Tabela II.
O treinamento da estrutura neural, para cada faixa de operação descrito na Tabela II, utilizou 10 conjuntos de dados de treinamento onde cada um representa o MIT da partida ao regime permanente. No primeiro processo de validação utiliza-se dados de simulação e no segundo são usados dados experimentais. Tal metodologia foi denominada em [16] de dupla validação cruzada.
A Fig. 12 apresenta o resultado de generalização relativo à primeira faixa de operação, onde o MIT é submetido a um conjugado de carga de 2,5 Nm em regime permanente.
A Fig. 13 apresenta os resultados de generalização para a estimativa de velocidade relativos à segunda faixa de operação (204 V a 216 V) e 3 Nm de conjugado de carga em regime permanente.
100 200 300 400 500 600 700 800 900 1000
0
50
100
150
200
250Estimativa de Velocidade: 200V - 206V
Amostras
Velo
cida
de (r
ad/s
)
Velocidade (em regime: 179,6 rad/s)Velocidade Estimada
Figura 12. Estimativa de velocidade na faixa 1 (200V-206V) e 2,5 Nm de conjugado de carga em regime permanente através do processo de bi-validação modificado.
Nas Figs. 14 e 15 são apresentados os resultados de
generalização da RNA para a faixa de operação 3 e 4; quando submetidos ao conjugado de carga de 3,8 Nm e 5,5 Nm respectivamente.
Observa-se um erro considerável de generalização nas primeiras 100 amostras, após a partida no método de bi-validação modificado. Esta quantidade de amostras equivale a 6 ciclos da senóide após a partida e se justifica pela saturação do fluxo eletromagnético gerado pelo enrolamento de estator, o qual não foi considerado durante o processo de treinamento utilizando o modelo do MIT. O erro médio variou de 1,21% a 3,73%.
100 200 300 400 500 600 700 800 900
0
50
100
150
200
250Estimativa de Velocidade: 204V - 216V
Amostras
Velo
cida
de (r
ad/s
)
Velocidade (em regime: 173,0 rad/s)Velocidade Estimada
Figura 13. Estimativa de velocidade na faixa 2 (204V-216V) e 3 Nm de conjugado de carga em regime permanente através do processo de bi-validação modificado.
100 200 300 400 500 600 700 800 900
0
50
100
150
200
250Estimativa de Velocidade: 214V - 226V
Amostras
Velo
cida
de (r
ad/s
)
Velocidade (em regime: 176,5 rad/s)Velocidade Estimada
Figura 14. Estimativa de velocidade na faixa 3 (214V-226V) e 3,8 Nm de conjugado de carga em regime permanente através do processo de bi-validação modificado.
100 200 300 400 500 600 700 800 900
0
50
100
150
200
250Estimativa de Velocidade: 224V - 236V
Amostras
Velo
cida
de (r
ad/s
)
Velocidade (em regime: 173,7 rad/s)Velocidade Estimada
Figura 15. Estimativa de velocidade na faixa 2 (224V-236V) e 5,5 Nm de conjugado de carga em regime permanente através do processo de bi-validação modificado.
VI. CONCLUSÕES
Neste artigo foi proposto um estimador de velocidade para o motor de indução trifásico baseado em redes neurais artificiais, organizada numa multi-estrutura, considerando uma ampla faixa de tensão e conjugado de carga aplicado no eixo da máquina.
No sentido de determinar a aplicabilidade da metodologia em situações reais, da partida ao regime permanente, apresentaram-se dados experimentais à estrutura neural treinada com dados de simulação através do método de bi-validação cruzada. Resultados de generalização em regime permanente mostraram-se satisfatórios, mas com erro elevado
776 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 2, MARCH 2013

em regime transitório. Para contornar tal inconveniente, utilizou-se o método de
bi-validação cruzada modificado, o qual consistiu em adicionar um pequeno conjunto de dados experimentais num conjunto de dados simulados para o treinamento da estrutura neural. A rede neural artificial apresentou a capacidade de aprender os padrões simulados e experimentais, e generalizar soluções em regime transitório e permanente.
Os resultados obtidos demonstraram que a RNA apresentou erro elevado de generalização até aproximadamente 20 rad/s diminuindo com o incremento da velocidade. Ainda, através dos ensaios, a máquina sofre variação dos seus parâmetros elétricos como as resistências com o aumento da temperatura, sendo que os mesmos ficam implícitos no ajuste dos pesos sinápticos da RNA.
Em regime permanente os resultados de generalização convergem para valores muito próximo do valor medido com erro inferior a 2%. Desta forma, pode-se inferir a validade da proposta baseada em redes neurais artificiais, com divisão por faixa de tensão, para valores acima de 20 rad/s, pois a mesma apresentou baixo erro de generalização considerando apenas dados experimentais quando usado o processo de bi-validação cruzada.
REFERÊNCIAS
[1] A. Bechouche, H. Sediki, D. O. Abdeslam, S. Haddad, “A novel method for identifying parameters of induction motors at standstill using ADALINE,” IEEE Transactions on Energy Conversion, vol. 27, no. 1, pp. 105-116, 2012.
[2] M. Wlas, Z. Krzemiriski and H. A. Toliyat, “Neural-network-based parameter estimations of induction motors,” IEEE Transactions on Industrial Electronics, vol. 55, no. 4, pp.1783-1794, 2008.
[3] A. Jaramillo-Matta, L. Guasch-Pesquer, L. Martinez-Salamero amd J. A. Barrado-Rodrigo, “Operating points estimation of three-phase induction machines using a torque–speed tracking technique,” IET Electric Power Applications, vol. 5, no. 3, pp. 307-316, 2011.
[4] P. VAS, Sensorless Vector and Direct Torque Control, Oxford University Press, 1998.
[5] B. Karanayil, M. F. Rahman and C. Grantham, “Online stator and rotor resistance estimation scheme using artificial neural networks for vector controlled speed sensorless induction motor drive,” IEEE Transactions on Industrial Electronics, vol. 54, no. 1, pp.167-176, 2007
[6] B. Lu, D. B. Durocher, and P. Stemper, “Online and nonintrusive continuous motor energy and condition monitoring in process industries,” IEEE Industry Applications Magazine, vol. Nov/Dec, pp. 52-60, 2009.
[7] B. Trajin, J. Regnier, and j. Faucher, “Comparison between stator current and estimated mechanical speed for detection of bearing wear in asynchronous drives,” IEEE Transactions on Industrial Electronics, vol. LVI, pp. 4700-4709, 2009.
[8] A. Sadeghian, Z. Ye, and B. Wu, “Online detection of broken rotor bars in induction motors by wavelet packet decomposition and artificial neural networks,” IEEE Transactions on Instrumentation and Measurement, vol. LVIII, pp. 2253-2263, 2009.
[9] P. V. J. Rodriguez, M. Negrea, and A. Arkkio, “A simplified scheme for induction motor condition monitoring," Mechanical Systems and Signal Processing, vol. XXII, pp. 1216-1236, 2008.
[10] E. C. Bortoni, “Are my motors oversized?,” Energy Conversion and Management, vol. L, pp. 2282-2287, 2009.
[11] D. Vukandinovic, M. Basic, and L. Kulisic, “Stator resistance identification based on neural and fuzzy logic principles in induction motor drive,” Neurocomputing, vol. LXXIII, pp. 602-612, 2010.
[12] V. N. Ghate, and S. V. Dudul, “Optimal MLP neural network classifier for fault detection of three phase induction motor,” Expert Systems with Applications, vol. XXXVII 3468-3481, 2010.
[13] E. Santacana, G. Rackliffe, L. Tang, and X. Feng, “Getting smart,” IEEE Power and Energy Magazine, vol. 8, no. 2, pp. 41-48, Mar., 2010.
[14] N. Ginot, M. A. Mannah, C. Batard, and M. Machmoum, “Application of power line communication for data transmission over pwm network,” IEEE Transactions on Smart Grid, vol. 1, no. 2, Sep., 2010.
[15] F. P. Marafão, S. M. Deckmann, and H. K. Morales, “A influência da referência de tensão na avaliação de indicadores de qualidade de energia,” IEEE Latin America Transactions, vol. 6, no. 1, pp. 81-87, 2008.
[16] A. Goedtel, “Estimador de velocidade em motores de indução trifásicos usando redes neurais artificiais,” Tese de Doutorado, Universidade de São Paulo (USP), São Carlos, 2007.
[17] C. M. Ong, Dynamic Simulation of Electric Machinery Using Matlab/Simulink, Prentice Hall, 1997.
[18] P. C. Krause, O. Wasynczyck, and S. D. Sudhoff, Analysis of Electrical Machinery and Drive Systems, John Wiley & Sons, 2002.
[19] R. Reginatto, J. E. N. Rico, “Modelamento do motor de indução - relatório técnico RT 93-3” Universidade Federal de Santa Catarina (UFSC), 1993.
[20] M. M. Kubo, “Uma contribuição ao modelamento matemático dinâmico de máquinas assíncronas trifásicas,” Dissertação de Mestrado, Faculdade de Engenharia Elétrica e Computação, Universidade de Campinas, 2000.
[21] IEEE Standard Test Procedure for Polyphase Induction Motors and Generators, IEEE Std. 112, 1996.
[22] S. Haykin, Neural Networks and Learnig Machines, Prentice Hall, 2009.
[23] A. Bechouche, H. Sediki, D. O. Abdeslam, and S. Haddad, “A novel method for identifying parameters of induction motors at standstill using ADALINE,” IEEE Transactions on Energy Conversion, vol. 27, no. 1, pp. 105-116, 2012.
[24] A. Y. Alanis, E. N. Sanchez, A. G. Loukianov, “Real-time discrete backstepping neural control for induction motors,” IEEE Transactions on Control Systems Technology, vol. 19, no. 2, pp. 359-366, 2012.
[25] P. Zhang, Y. Du, Habetler, T.G., Bin Lu, “Magnetic effects of DC signal injection on induction motors for thermal evaluation of stator windings.” IEEE Transactions on Industrial Electronics, Volume: 58 , Issue: 5 Page(s): 1479 – 1489, 2011.
[26] I. P. Georgakopoulos, E. D. Mitronikas, A.N. Safacas, “Detection of induction motor faults in inverter drives using inverter input current analysis.” IEEE Transactions on Industrial Electronics, vol. 58, no. 9, pp. 4365-4373, 2011.
[27] Z. Gao, L. Turner, R. S. Colby, B. Leprettre, “A frequency demodulation approach to induction motor speed detection.” IEEE Transactions on Industry Applications, vol. 47, no. 4, pp. 1632-1642, 2011.
[28] H. Nian, Y. Song, P. Zhou, and Y. He, “Improved direct power control of a wind turbine driven doubly fed induction generator during transient grid voltage unbalance,” IEEE Transactions on Energy Conversion, vol. 26, no. 3, pp. 976-986, 2011.
Alessandro Goedtel, nascido em 12/02/1972 em Arroio do Meio (RS) é engenheiro eletricista (1996) pela Universidade Federal do Rio Grande do Sul (UFRGS-DEE); mestre em Engenharia Industrial (2003) pela Universidade Estadual Paulista (UNESP-FEB) e doutor em Engenharia Elétrica (2007) pela Escola de Engenharia de São Carlos (EESC) da
Universidade de São Paulo (USP). É professor do Departamento de Eletrotécnica da Universidade Tecnológica Federal do Paraná (UTFPR-CP) desde 2007. Suas áreas de interesse são: acionamento de máquinas, sistemas inteligentes e ensino de Engenharia Elétrica. É membro da SBA.
Ivan Nunes da Silva, nascido em 03/08/1967 em São José do Rio Preto (SP) é engenheiro eletricista (1992) e bacharel em ciência da computação (1991) pela Universidade Federal de Uberlândia; mestre (1995) e doutor em Engenharia Elétrica (1997) pela Universidade Estadual de Campinas (UNICAMP). É coordenador do Laboratório de Automação Inteligente de
Processos e Sistemas (LAIPS). É professor associado do Departamento de Engenharia Elétrica da Escola de Engenharia de São Carlos (EESC) da Universidade de São Paulo (USP) desde 2004. Suas áreas de interesse são: sistemas inteligentes, identificação de processos e Ensino de Engenharia. É membro da SBA e IEEE, sendo atualmente editor associado da revista Controle & Automação.
GOEDTEL et al.: SPEED ESTIMATION FOR INDUCTION 777

Paulo José Amaral Serni, nascido em 30/03/1957 em Botucatu (SP) é engenheiro eletricista (1987) pela Faculdade de Engenharia e Tecnologia; mestre (1992) e doutor em Engenharia Elétrica (1999) pela Universidade Estadual de Campinas (UNICAMP). É professor do Departamento de Engenharia Elétrica da Universidade Estadual Paulista (UNESP-
FEB) desde 1987. Suas áreas de interesse são: acionamento de máquinas, sistemas inteligentes, qualidade da energia elétrica, harmônicos em sistemas elétricos de potência, eletrônica de potência e ensino de Engenharia Elétrica. É membro da SOBRAEP.
Marcelo Suetake, nascido em 22/12/1981 em Rinópolis (SP), é engenheiro eletricista (2006) pela Universidade Estadual Paulista (UNESP); mestre em engenharia elétrica pela Escola de Engenharia de São Carlos (EESC) da Universidade de São Paulo (2008). Atualmente é doutorando da Universidade de São
Paulo (USP). Suas áreas de interessa são: Acionamento e controle de máquinas elétricas, sistemas inteligentes e sistemas embarcados.
Claudionor Francisco do Nascimento, nascido em 08/11/1966 em Bauru (SP) é engenheiro eletricista (1991) pela Universidade Estadual Paulista (UNESP-FEB); mestre (2003) e doutor em Engenharia Elétrica (2007) pela Escola de Engenharia de São Carlos (EESC) da Universidade de São Paulo (USP). Atualmente é professor do CECS da Universidade Federal do ABC (UFABC) desde 2009. Suas
áreas de interesse são: eletrônica de potência, qualidade da energia elétrica, harmônicos em sistemas elétricos de potência, sistemas inteligentes, acionamentos de máquinas elétricas e ensino de Engenharia Elétrica. É membro da SOBRAEP.
Sergio Augusto Oliveira da Silva, nascido em 07/07/1964 em Joaquim Távora (PR) é engenheiro eletricista (1987) e mestre (1989) pela Universidade Federal de Santa Catariana (SC); doutor em Engenharia Elétrica pela Universidade Federal de Minas Gerais (2001). É professor do Departamento de Eletrotécnica da Universidade Tecnológica Federal do Paraná (UTFPR-CP) desde 2003. Suas áreas de interesse são:
qualidade da energia elétrica, sistemas UPS, filtros ativos de potência e sistemas de controle. É membro da SOBRAEP.
778 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 2, MARCH 2013