solutions for nonlinear equations lecture 8 alessandra nardi thanks to prof. newton, prof....
Post on 21-Dec-2015
220 views
TRANSCRIPT
Solutions for Nonlinear Equations
Lecture 8
Alessandra Nardi
Thanks to Prof. Newton, Prof. Sangiovanni, Prof. White, Jaime Peraire, Deepak Ramaswamy, Michal Rewienski, and Karen Veroy

Last Lecture Review
• How to represent circuits– MNA– Voltage sources– How to assemble, X-stamp
• How to solve linear systems– Gaussian elimination– LU decomposition

Outline
• Nonlinear problems• Iterative Methods• Newton’s Method
– Derivation of Newton– Quadratic Convergence– Examples– Convergence Testing
• Multidimensonal Newton Method– Basic Algorithm – Quadratic convergence– Application to circuits

Need to Solve
( 1) 0d
t
VV
d sI I e
Nonlinear Problems - Example
0
1
IrI1 Id
0)1(1
0
11
1
1
IeIeR
III
tV
e
s
dr
11)( Ieg
Nonlinear Equations
• Given g(V)=I
• It can be expressed as: f(V)=g(V)-I
Solve g(V)=I equivalent to solve f(V)=0
Hard to find analytical solution for f(x)=0
Solve iteratively

Nonlinear Equations – Iterative Methods
• Start from an initial value x0
• Generate a sequence of iterate xn-1, xn, xn+1 which hopefully converges to the solution x*
• Iterates are generated according to an iteration function F: xn+1=F(xn)
Ask• When does it converge to correct solution ?• What is the convergence rate ?

Newton-Raphson (NR) MethodConsists of linearizing the system.
Want to solve f(x)=0 Replace f(x) with its linearized version and solve.
Note: at each step need to evaluate f and f’
functionIterationxfxdx
dfxx
xxxdx
dfxfxf
iesTaylor Serxxxdx
dfxfxf
kkkk
kkkkk
)()(
))(()()(
))(()()(
11
11
***

Newton-Raphson Method – Graphical View

Newton-Raphson Method – Algorithm
Define iteration
Do k = 0 to ….
until convergence
• How about convergence?
• An iteration {x(k)} is said to converge with order q if there exists a vector norm such that for each k N:
qkk xxxx ˆˆ1
)()(1
1 kkkk xfxdx
dfxx

2* * * 2
2
*
0 ( ) ( ) ( )( ) ( )( )
some [ , ]
k k k k
k
df d ff x f x x x x x x x
dx dx
x x x
Mean Value theoremtruncates Taylor series
But10 ( ) ( )( )k k k kdf
f x x x xdx
by Newtondefinition
Newton-Raphson Method – Convergence

Subtracting
21 * 1 * 2
2 ( ) [ ( )] ( )( )k k kdf d f
x x x x x xdx d x
Convergence is quadratic
21 * * 2
2( )( ) ( )( )k k kdf d fx x x x x x
dx d x
Dividing through
21
2
21 * *
Let [ ( )] ( )
then
k k
k k k
df d fx x K
dx d x
x x K x x
Newton-Raphson Method – Convergence

Newton-Raphson Method – Convergence
Local Convergence Theorem
If
Then Newton’s method converges given a sufficiently close initial guess (and
convergence is quadratic)
boundedisK
boundeddx
fdb
roay from zebounded awdx
dfa
)
)
2
2
21
2 21 * * *
* 2
2
1 *
*
( ) 2
( ) 1 0,
2 ( ) 1
2 ( ) 2 ( )
1( ) (
( 1
)2
)
k k
k k k k
k k k k k
k kk
dfx x
dx
x x x x
x x x x x x x
f x x fin
x
d x x
or x x x xx
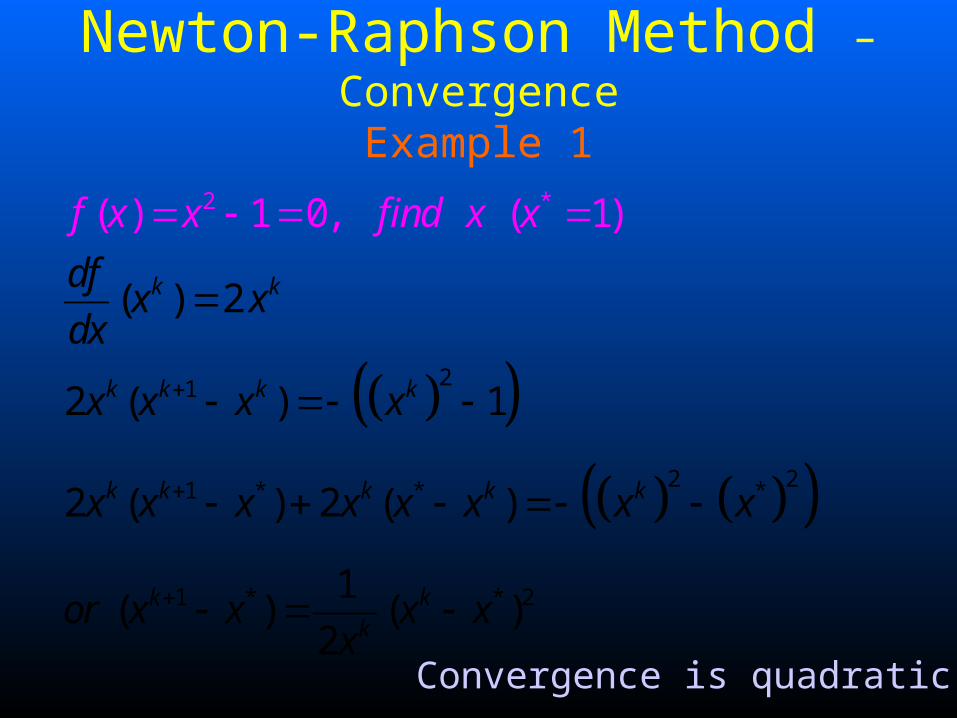
Convergence is quadratic
Newton-Raphson Method – ConvergenceExample 1
1 2
1 *
* *1
2 *
( ) 2
2 ( 0) ( 0)
10 0
( ) 0,
for 02
1( ) ( )
2
0
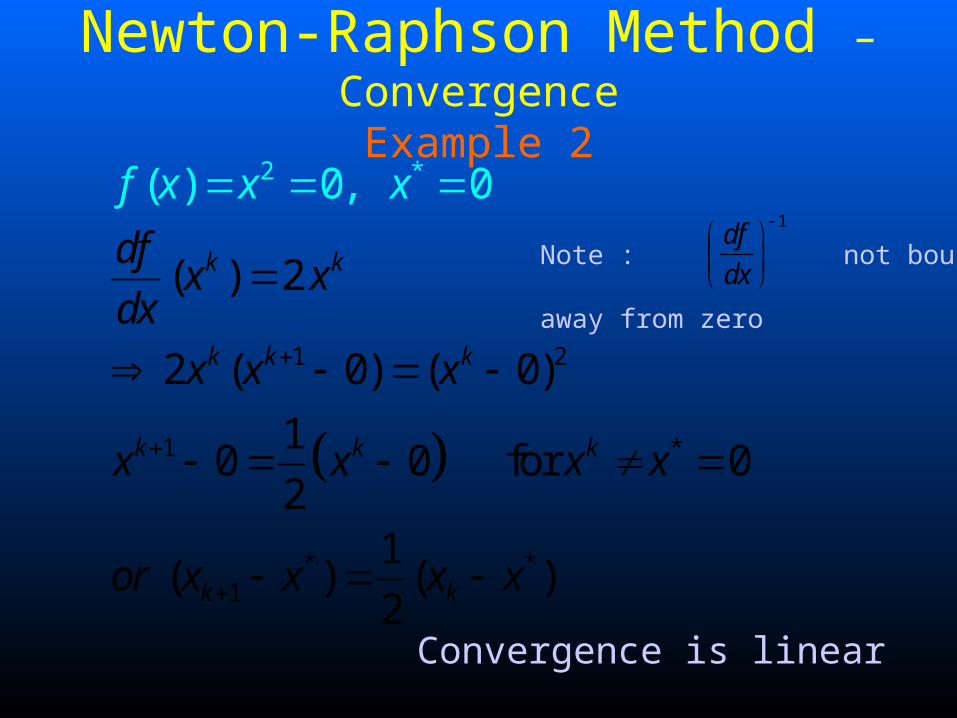
k k
k k k
k k k
k k
dfx x
dx
x x x
x x x x
or x x x
f x
x
x x
Convergence is linear
Note : not bounded
away from zero
1df
dx
Newton-Raphson Method – ConvergenceExample 2
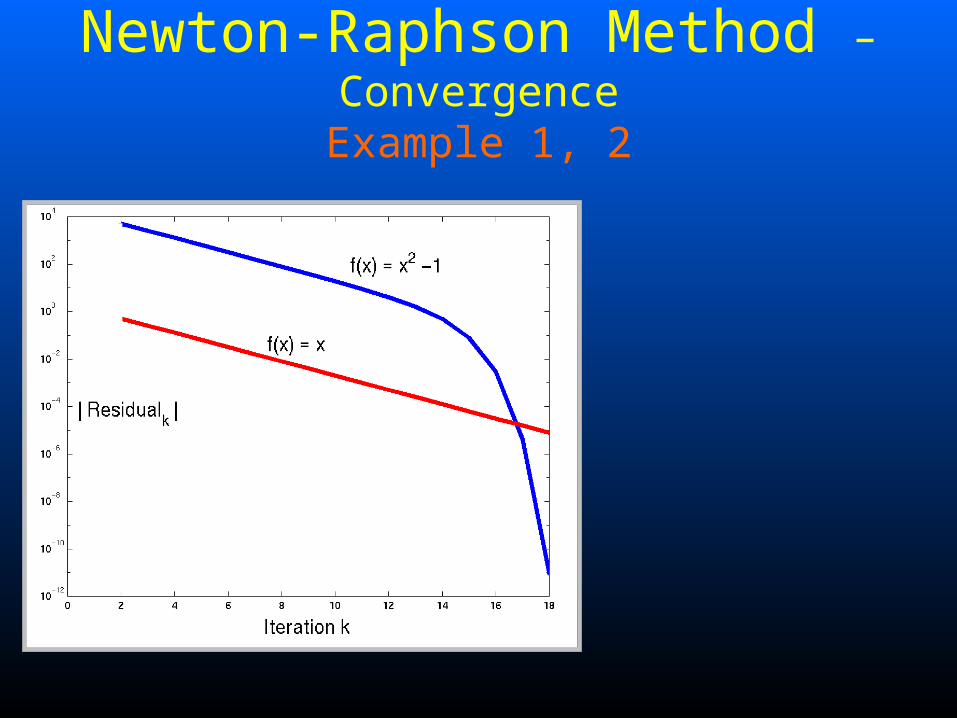
Newton-Raphson Method – ConvergenceExample 1, 2

0 Initial Guess,= 0x k
Repeat { 1
k
k k kf x
x x f xx
} Until ?
1 1? ?k k kf x thresholdx x threshold
1k k
Newton-Raphson Method – Convergence

Need a "delta-x" check to avoid false convergence
X
f(x)
1kx kx *x
1 a
kff x
1 1 a r
k k kx xx x x
Newton-Raphson Method – ConvergenceConvergence Checks

Also need an " " check to avoid false convergencef x
X
f(x)
1kx kx
*x
1 a
kff x
1 1 a r
k k kx xx x x
Newton-Raphson Method – ConvergenceConvergence Checks

demo2
Newton-Raphson Method – Convergence

X
f(x)
Convergence Depends on a Good Initial Guess
0x
1x2x 0x
1x
Newton-Raphson Method – ConvergenceLocal Convergence

Convergence Depends on a Good Initial Guess
Newton-Raphson Method – ConvergenceLocal Convergence
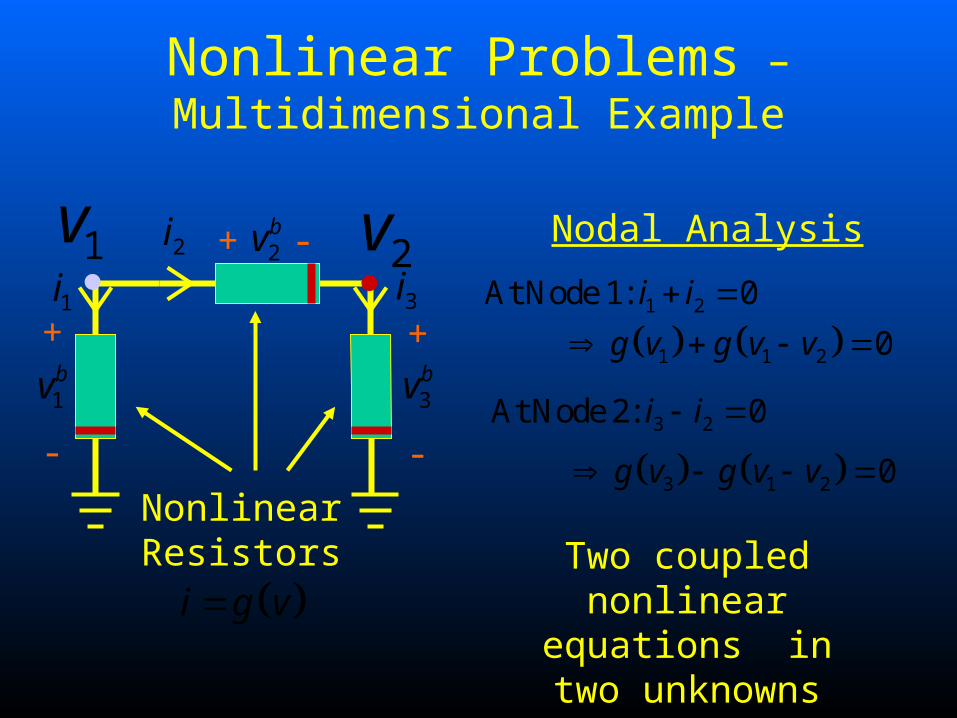
Nodal Analysis
1 2At Node 1: 0i i
1bv
+
-
1i2i 2
bv
3i+ -
3bv
+
-
NonlinearResistors
i g v
1v2v
1 1 2 0g v g v v
3 2At Node 2: 0i i
3 1 2 0g v g v v
Two coupled nonlinear equations in two unknowns
Nonlinear Problems – Multidimensional Example

* *Problem: Find such tha 0t x F x * N N N and : x F
Multidimensional Newton Method
functionIterationxFxJxx
atrixJacobian M
x
xF
x
xF
x
xF
x
xF
xJ
iesTaylor SerxxxJxFxF
kkkk
N
NN
N
)()(
)()(
)()(
)(
))(()()(
11
1
1
1
1
***
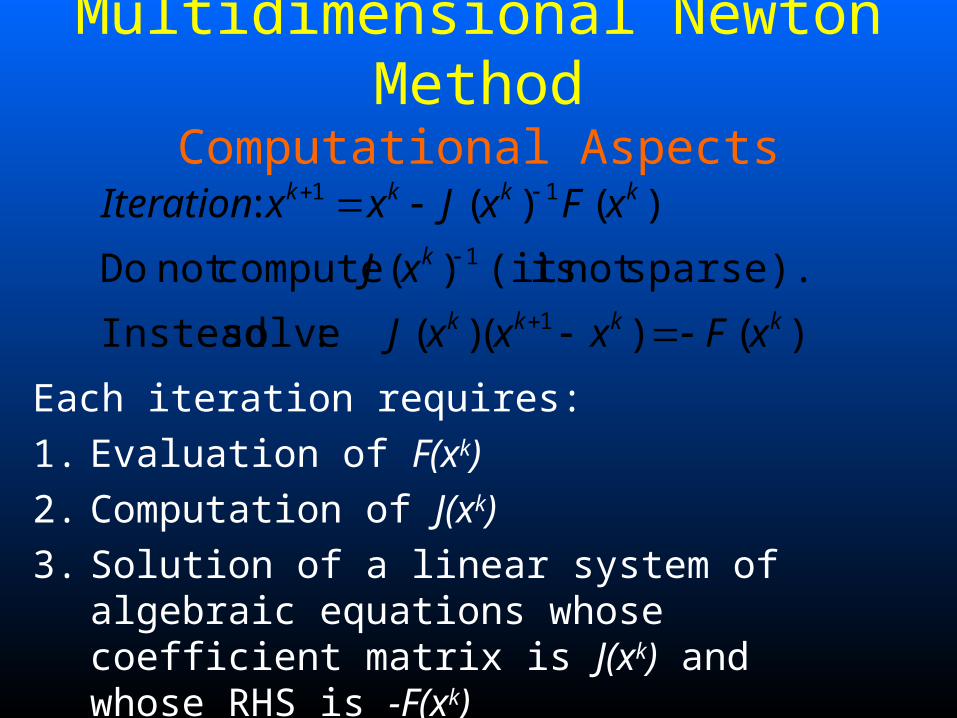
Multidimensional Newton MethodComputational Aspects
)()()( :solve Instead
sparse).not is(it )( computenot Do
)()(:
1
1
11
kkkk
k
kkkk
xFxxxJ
xJ
xFxJxxIteration
Each iteration requires:
1. Evaluation of F(xk)
2. Computation of J(xk)
3. Solution of a linear system of algebraic equations whose coefficient matrix is J(xk) and whose RHS is -F(xk)
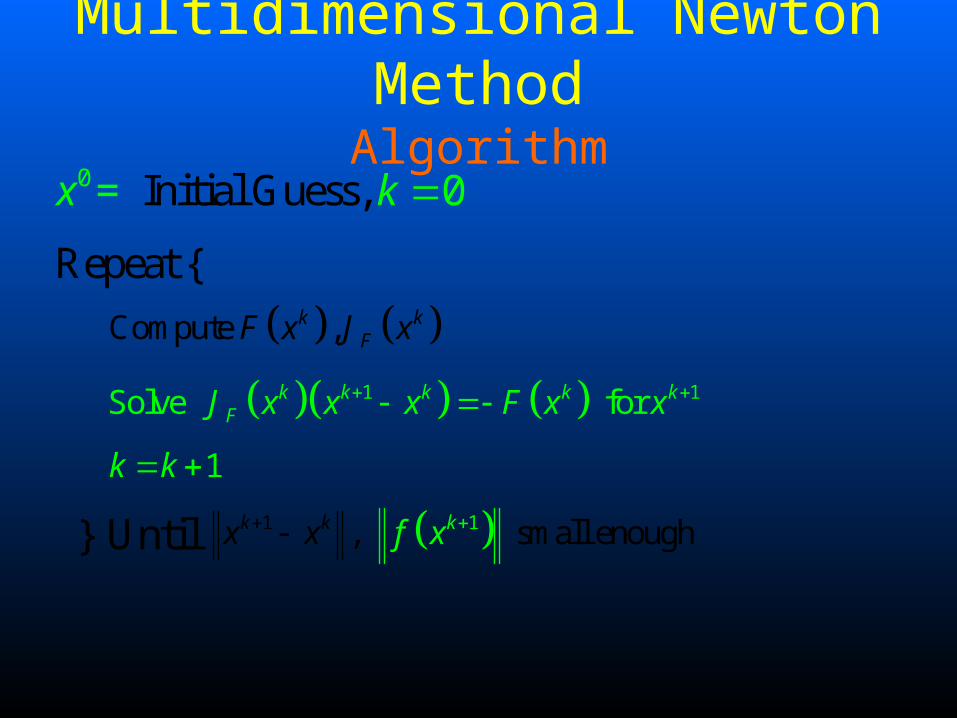
0 Initial Guess,= 0x k
Repeat {
1 1Solve for k k k k kFJ x x x F x x
} Until 11 , small en ug o hkk kx x f x
1k k
Compute ,k kFF x J x
Multidimensional Newton MethodAlgorithm

If
1) Inverse is boundedkFa J x
) Derivative is Lipschitz ContF Fb J x J y x y
Then Newton’s method converges given a sufficiently close initial guess (and
convergence is quadratic)
Multidimensional Newton Method Convergence
Local Convergence Theorem

Application of NR to Circuit Equations
0
1
IrI1 Id
01
,
0
1
11
1
11
11
1
1
11
1
1
1
11
k
dk
k
k
k
v
kk
r
VV
S
I
VV
Sk
k
VV
S
kkkkk
VVeV
I
RIeI
R
VVf
eIVgIVgR
VVf
VVVfVfVf

Note: G0 and Id depend on the iteration count k G0=G0(k) and Id=Id(k)
Application of NR to Circuit EquationsCompanion Network – MNA templates
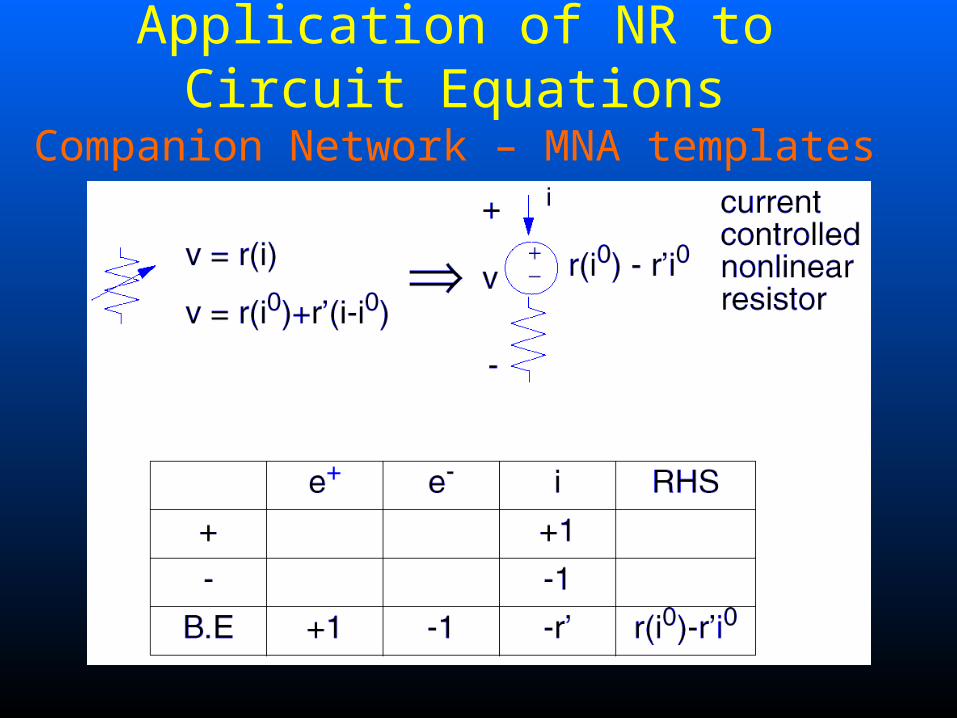
Application of NR to Circuit EquationsCompanion Network – MNA templates

Modeling a MOSFET(MOS Level 1, linear regime)
d
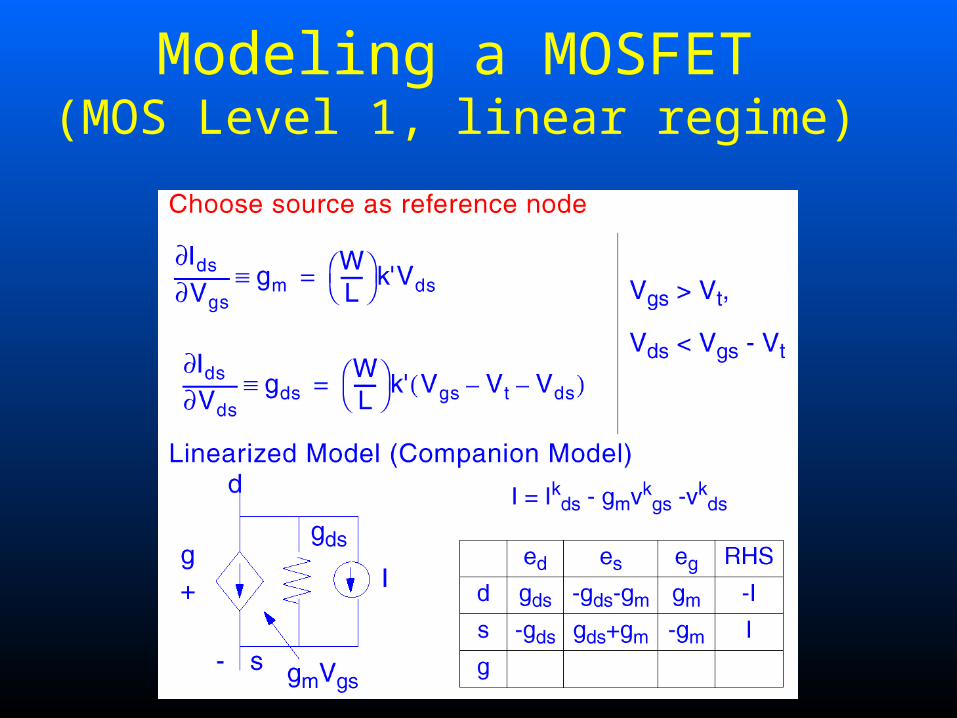
Modeling a MOSFET(MOS Level 1, linear regime)
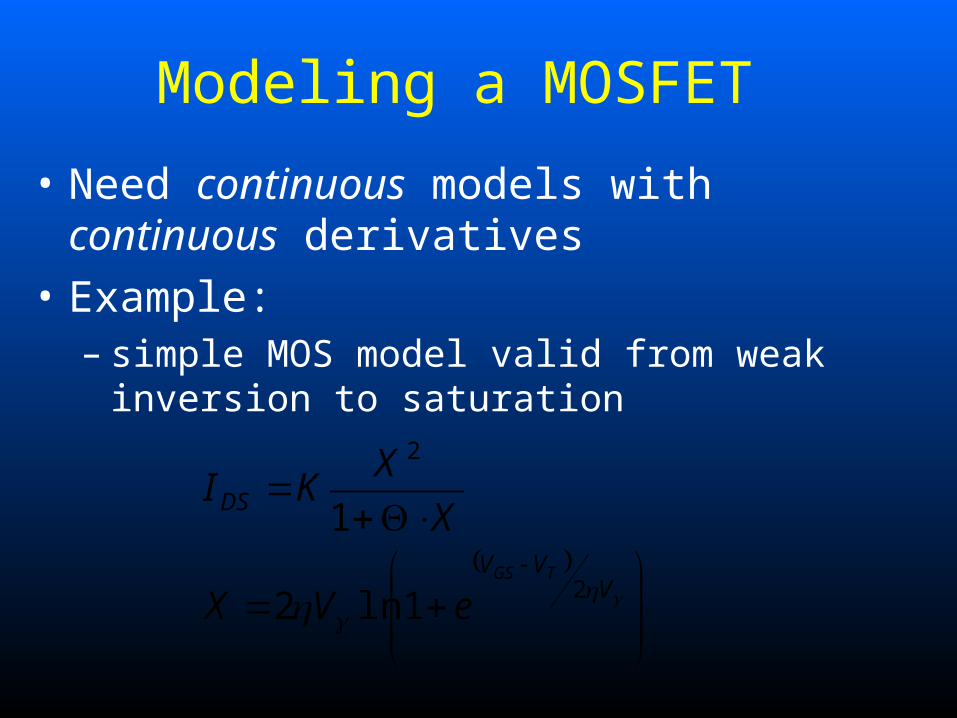
Modeling a MOSFET
• Need continuous models with continuous derivatives
• Example: – simple MOS model valid from weak inversion to
saturation
VVV
DS
TGS
eVX
X
XKI
2
2
1ln2
1
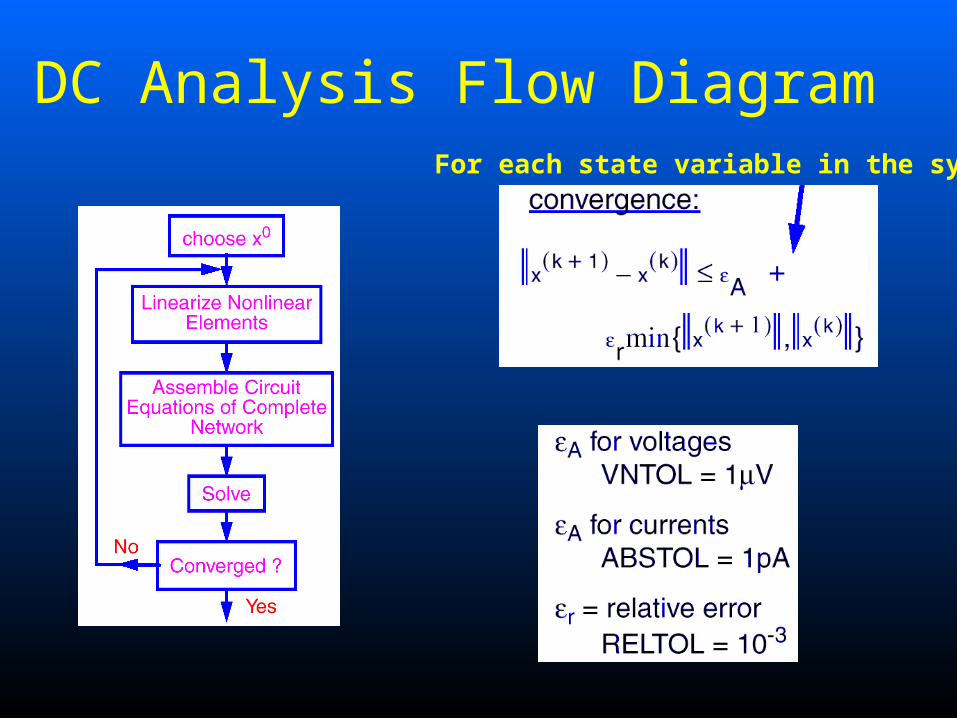
DC Analysis Flow DiagramFor each state variable in the system
Implications• Device model equations must be continuous with continuous
derivatives and derivative calculation must be accurate derivative of function (not all models do this - Poor diode models and breakdown models don’t - be sure models are decent - beware of user-supplied models)
• Watch out for floating nodes (If a node becomes disconnected, then J(x) is singular)
• Give good initial guess for x(0)
• Most model computations produce errors in function values and derivatives. Want to have convergence criteria || x(k+1) - x(k) || < such that > than model errors.

Summary
• Nonlinear problems
• Iterative Methods
• Newton’s Method– Derivation of Newton
– Quadratic Convergence
– Examples
– Convergence Testing
• Multidimensional Newton Method– Basic Algorithm
– Quadratic convergence
– Application to circuits

Methods for Ordinary Differential Equations
Lecture 10
Alessandra Nardi
Thanks to Prof. Jacob White, Deepak Ramaswamy Jaime Peraire, Michal Rewienski, and Karen Veroy

Outline
• Transient Analysis of dynamical circuits– i.e., circuits containing C and/or L
• Examples
• Solution of Ordinary Differential Equations (Initial Value Problems – IVP)– Forward Euler (FE), Backward Euler (BE) and
Trapezoidal Rule (TR)– Multistep methods– Convergence
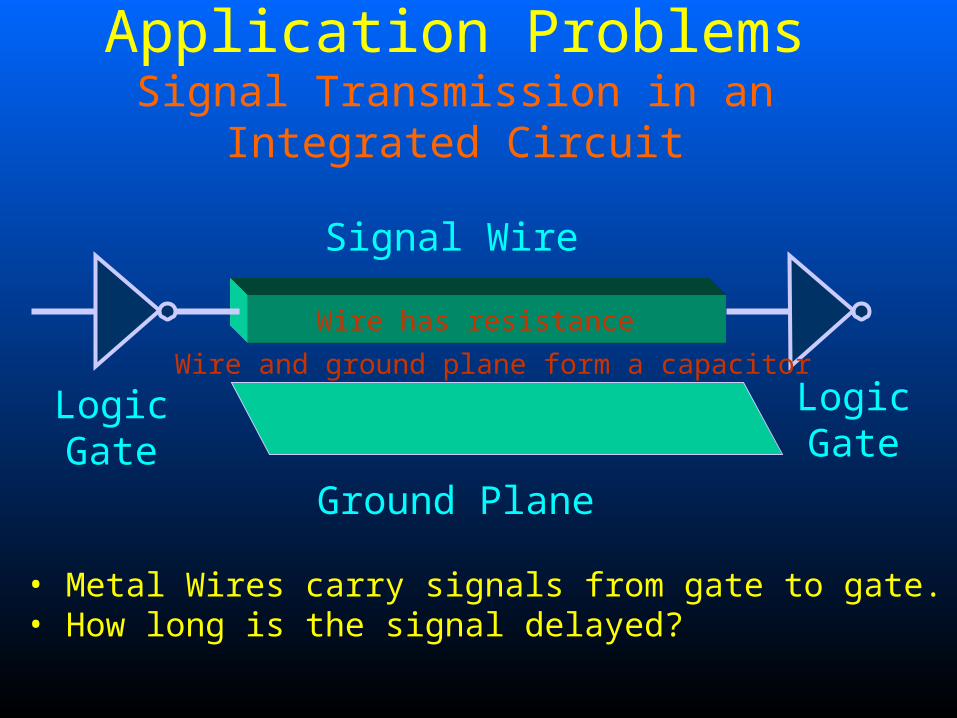
Ground Plane
Signal Wire
LogicGate
LogicGate
• Metal Wires carry signals from gate to gate.• How long is the signal delayed?
Wire and ground plane form a capacitor
Wire has resistance
Application ProblemsSignal Transmission in an Integrated Circuit
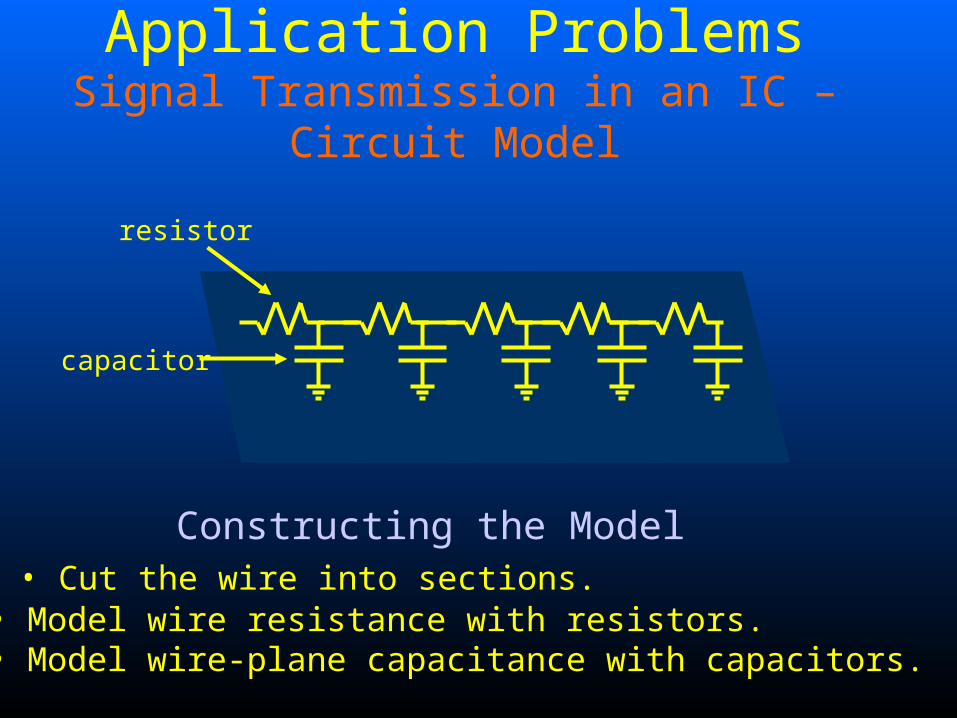
capacitor
resistor
• Model wire resistance with resistors.• Model wire-plane capacitance with capacitors.
Constructing the Model• Cut the wire into sections.
Application ProblemsSignal Transmission in an IC – Circuit Model
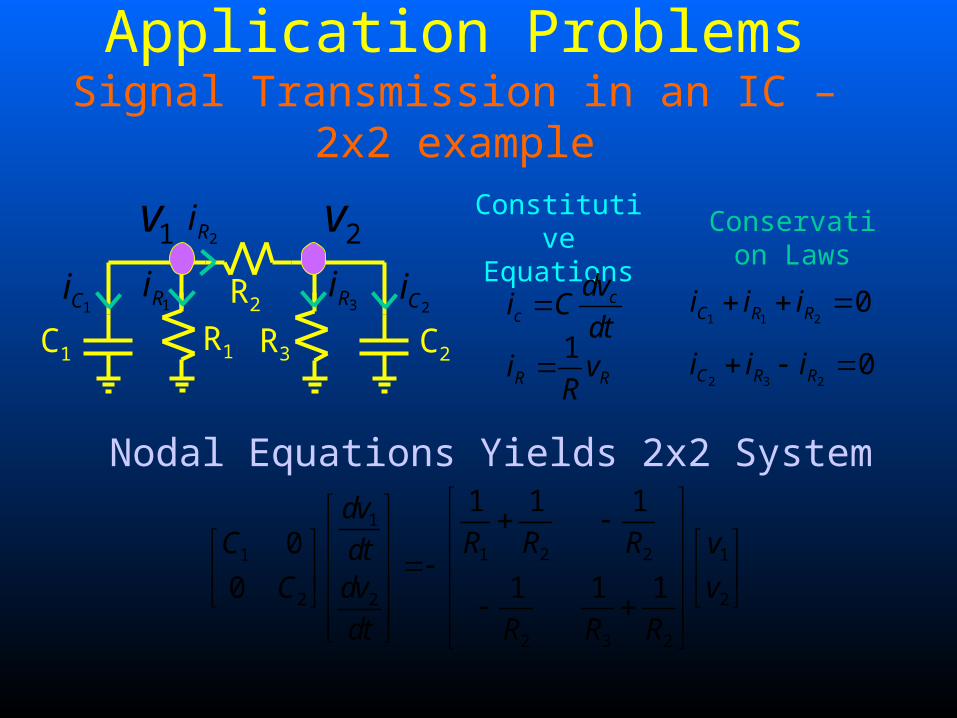
Nodal Equations Yields 2x2 System
C1
R2
R1 R3 C2
Constitutive Equations
cc
dvi C
dt
1R Ri v
R
Conservation Laws
1 1 20C R Ri i i
2 3 20C R Ri i i
1
1 2 21 1
2 22
2 3 2
1 1 1
0
0 1 1 1
dvR R RC vdt
C vdv
R R Rdt
1Ri1Ci
2Ri
2Ci3Ri
1v 2v
Application ProblemsSignal Transmission in an IC – 2x2 example
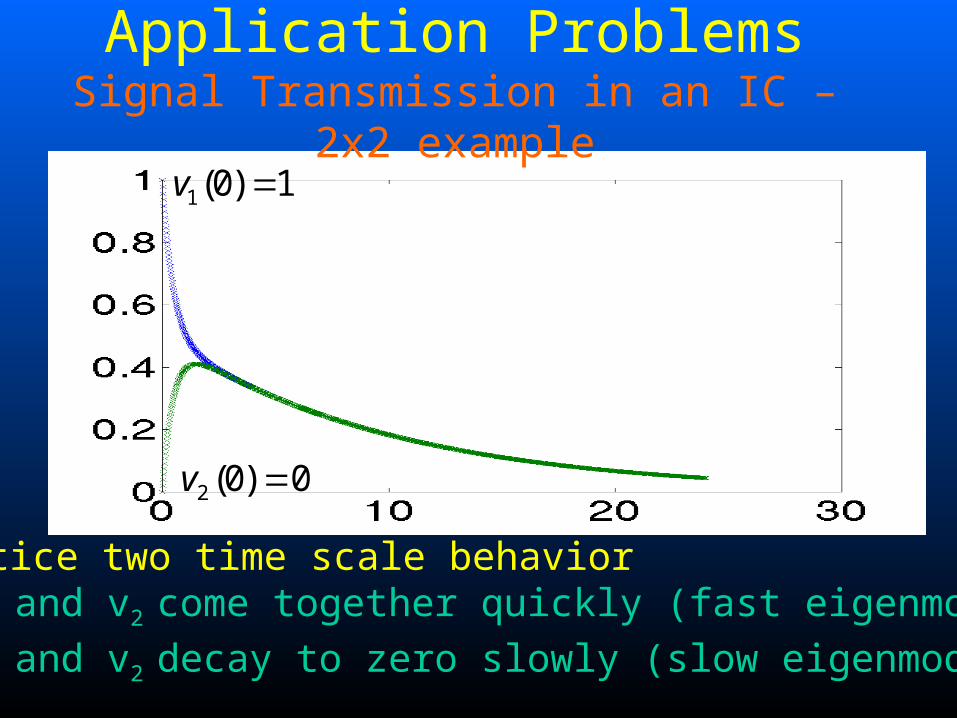
1(0) 1v
2 (0) 0v
Notice two time scale behavior• v1 and v2 come together quickly (fast eigenmode).• v1 and v2 decay to zero slowly (slow eigenmode).
Application ProblemsSignal Transmission in an IC – 2x2 example

Circuit Equation Formulation
• For dynamical circuits equations can be written compactly:
• For sake of simplicity, we shall discuss first order ODEs in the form:
riablescircuit va of vector theis where
)0(
0),,)(
(
0
x
xx
txdt
tdxF
),()(
txfdt
tdx

Ordinary Differential EquationsInitial Value Problems (IVP)
Typically analytic solutions are not available
solve it numerically
.condition initial given the intervalan in
)(
),()(
:(IVP) Problem Value Initial Solve
00
00
x,T][t
xtx
txfdt
tdx

• Not necessarily a solution exists and is unique for:
• It turns out that, under rather mild conditions on the continuity and differentiability of F, it can be proven that there exists a unique solution.
• Also, for sake of simplicity only consider
linear case:
0),,( tydt
dyF
We shall assume that has a unique solution 0),,( tydt
dyF
00 )(
)()(
xtx
tAxdt
tdx
Ordinary Differential Equations Assumptions and Simplifications

First - Discretize Time
Second - Represent x(t) using values at ti
ˆ ( )llx x t
Approx. sol’n
Exact sol’n
Third - Approximate using the discrete ( )l
dx t
dtˆ 'slx
1 1
1
ˆ ˆ ˆ ˆExample: ( )
l l l l
ll l
d x x x xx t or
dt t t
Lt T1t 2t 1Lt 0
t t t
1t 2t 3t Lt0
3x̂ 4x̂1x̂
2x̂
Finite Difference MethodsBasic Concepts
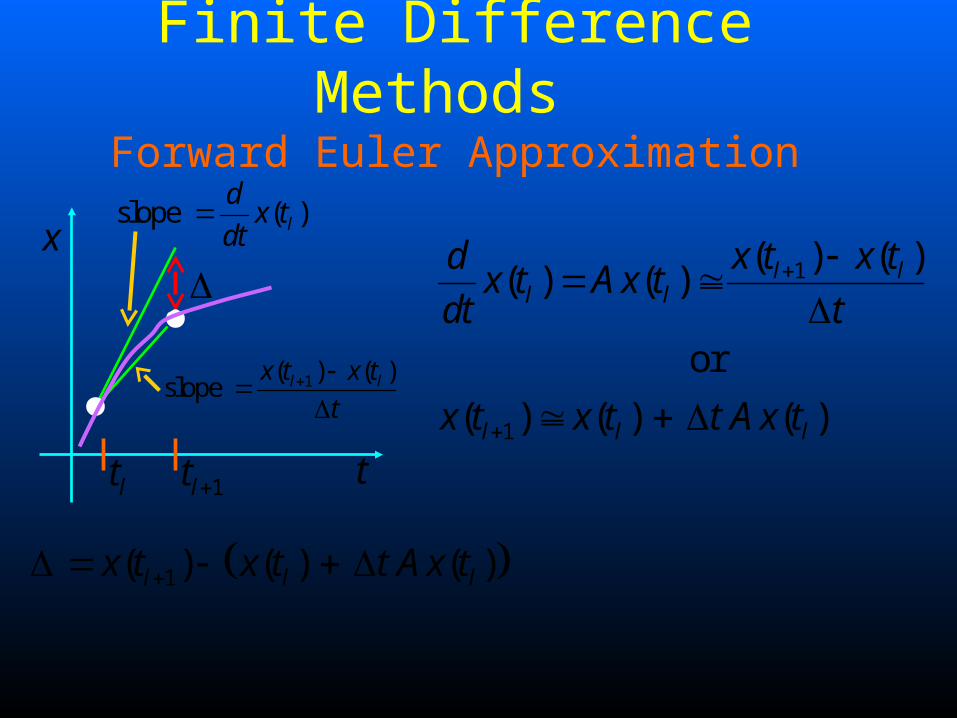
lt 1lt t
x
1( ) ( )slope l lx t x t
t
slope ( )l
dx t
dt
1( ) ( ) ( )l l lx t x t t A x t
1
1
( ) ( )( ) ( )
or
( ) ( ) ( )
l ll l
l l l
x t x tdx t A x t
dt t
x t x t t A x t
Finite Difference Methods Forward Euler Approximation

1t 2t t
x
(0)tAx
11 ˆ( ) (0) 0x t x x tAx
3t
2 1 12 ˆ ˆ ˆ( )x t x x tAx
1ˆtAx
1 1ˆ ˆ ˆ( ) L L LLx t x x tAx
Finite Difference Methods Forward Euler Algorithm
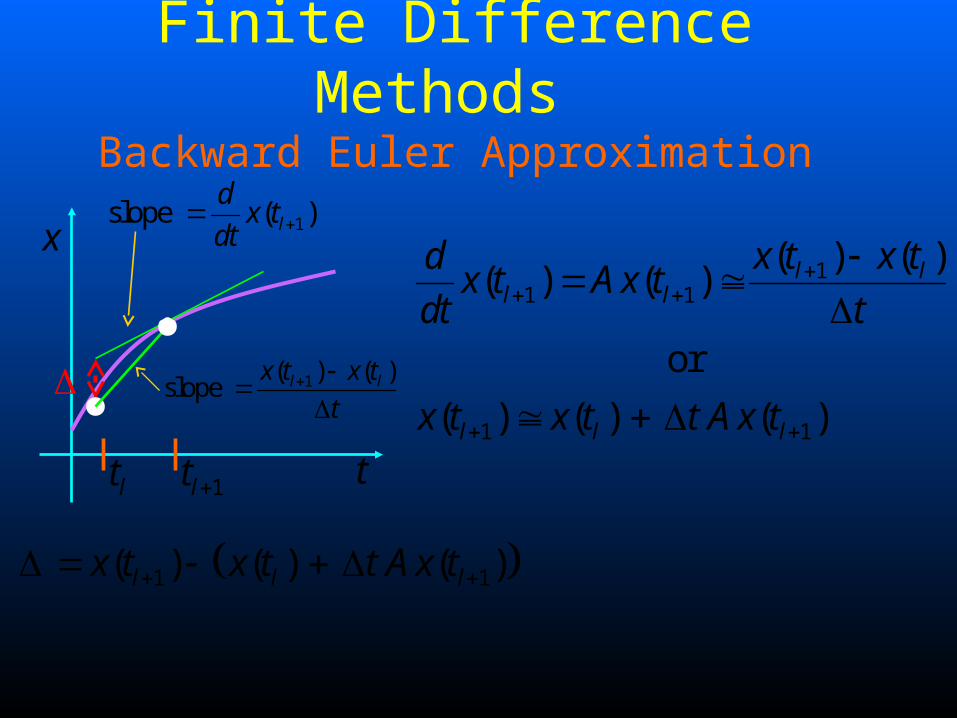
lt 1lt t
x 1slope ( )l
dx t
dt
1( ) ( )slope l lx t x t
t
1 1( ) ( ) ( )l l lx t x t t A x t
11 1
1 1
( ) ( )( ) ( )
or
( ) ( ) ( )
l ll l
l l l
x t x tdx t A x t
dt t
x t x t t A x t
Finite Difference Methods Backward Euler Approximation
1t 2t t
x
1ˆtAx
2ˆtAx
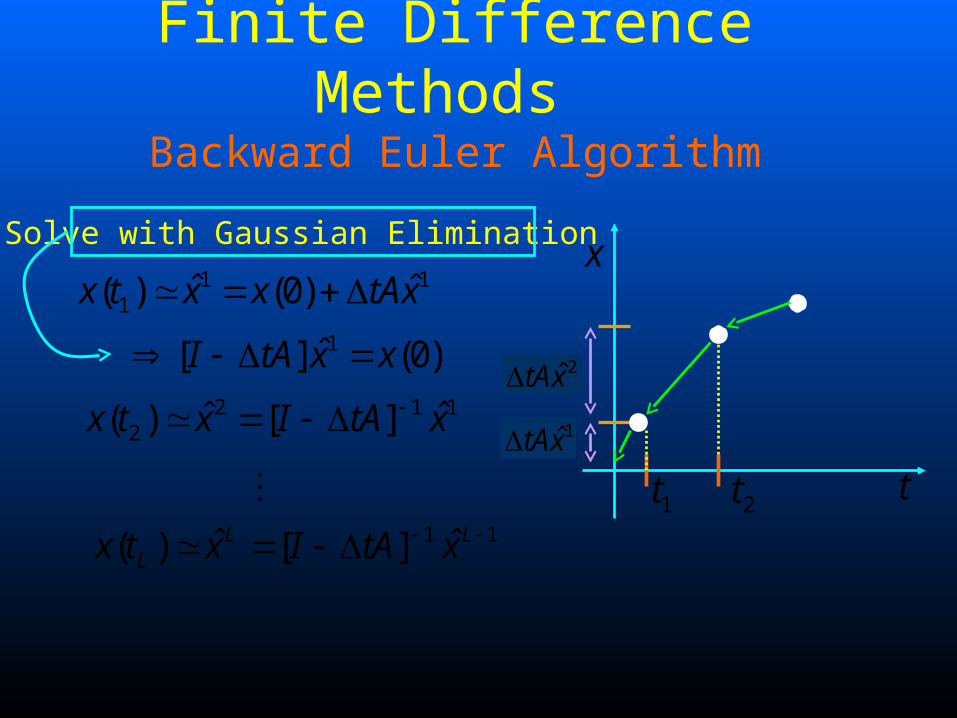
1 11 ˆ ˆ( ) (0)x t x x tAx
Solve with Gaussian Elimination
1ˆ[ ] (0)I tA x x
1 1ˆ ˆ( ) [ ]L LLx t x I tA x
2 1 12 ˆ ˆ( ) [ ]x t x I tA x
Finite Difference Methods Backward Euler Algorithm

1
1
1
1 1
1( ( ) ( ))
21
( ( ) ( ))2
( ) ( )
1( ) ( ) ( ( ) ( ))
2
l l
l l
l l
l l l l
d dx t x t
dt dt
Ax t Ax t
x t x t
t
x t x t tA x t x t
t
x
1( ) ( )slope l lx t x t
t
slope ( )l
dx t
dt
1slope ( )l
dx t
dt
1 1
1 1( ( ) ( )) ( ( ) ( ))
2 2l l l lx t tAx t x t tAx t
Finite Difference Methods Trapezoidal Rule Approximation

1t 2t t
x
1ˆ (0)2 2
t tI A x I A x
Solve with Gaussian Elimination
1 11 ˆ ˆ( ) (0) (0)
2
tx t x x Ax Ax
12 1
2
11
ˆ ˆ( )2 2
ˆ ˆ( )2 2
L LL
t tx t x I A I A x
t tx t x I A I A x
Finite Difference Methods Trapezoidal Rule Algorithm
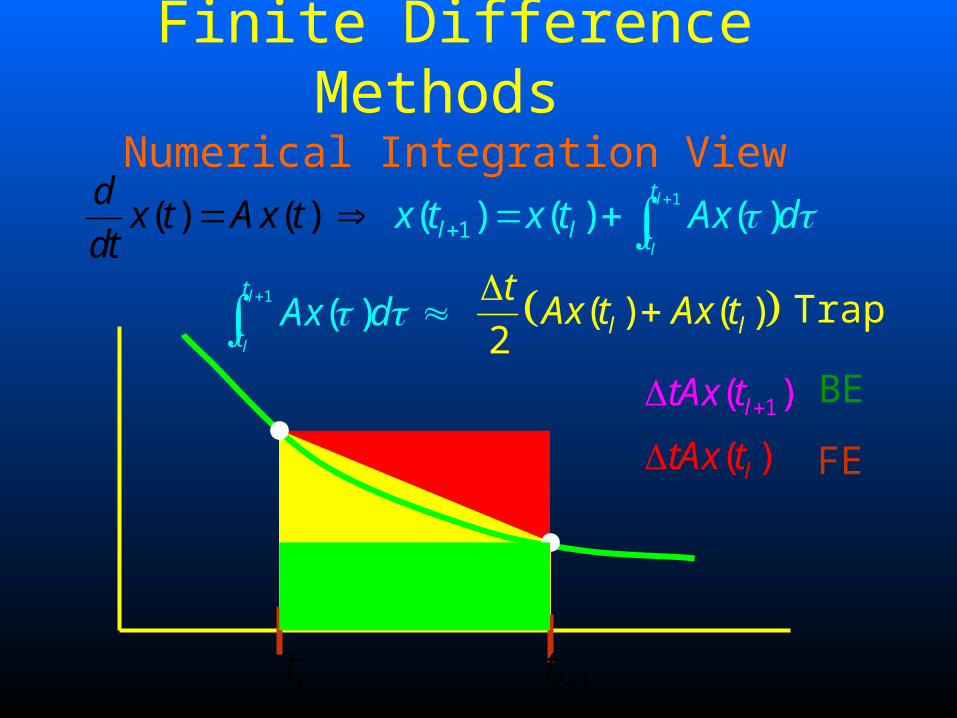
1
1( ) (( ) )) )( (l
l
t
l l t
dx t x t x t A dx t xA
dt
lt 1lt
1
( )l
l
t
tAx d
1( )ltAx t BE
( )ltAx t FE
( ) ( )2 l l
tAx t Ax t
Trap
Finite Difference Methods Numerical Integration View
Trap Rule, Forward-Euler, Backward-Euler Are all one-step methods
Forward-Euler is simplest No equation solution explicit method. Boxcar approximation to integralBackward-Euler is more expensive Equation solution each step implicit method Trapezoidal Rule might be more accurate
Equation solution each step implicit method
Trapezoidal approximation to integral
1 2 3ˆ ˆ ˆ ˆ is computed using only , not , , etc.l l l lx x x x
Finite Difference Methods Summary of Basic Concepts
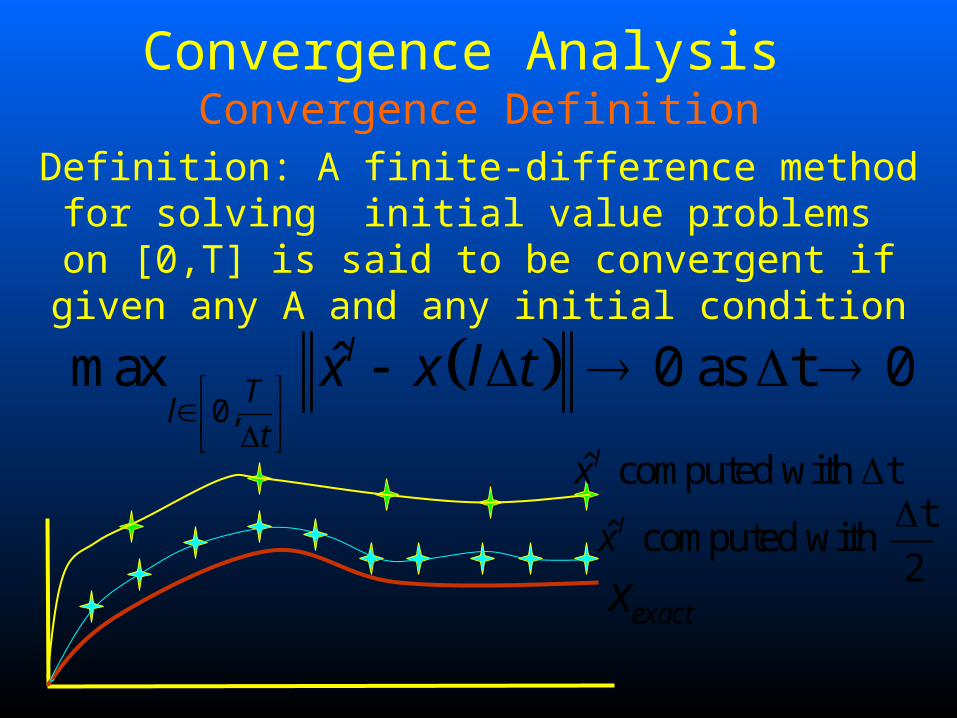
Definition: A finite-difference method for solving initial value problems on [0,T] is said to be
convergent if given any A and any initial condition
0,
ˆmax 0 as t 0lT
lt
x x l t
exactx
tˆ computed with
2lx
ˆ computed with tlx
Convergence Analysis Convergence Definition
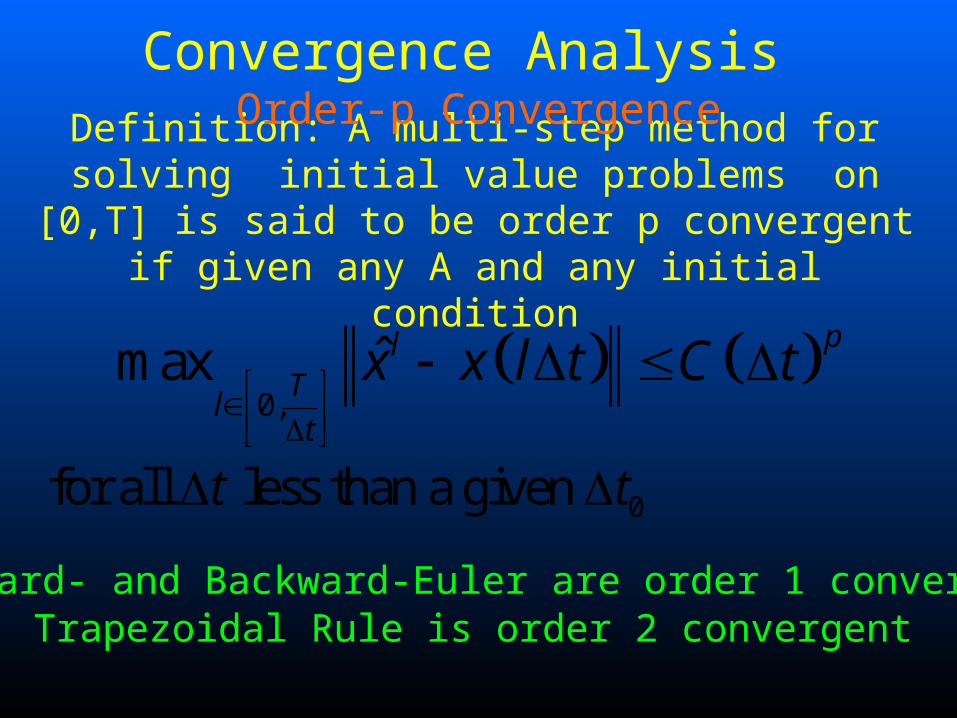
Definition: A multi-step method for solving initial value problems on [0,T] is said to be order p
convergent if given any A and any initial condition
0,
ˆmaxpl
Tl
t
x x l t C t
0for all less than a given t t
Forward- and Backward-Euler are order 1 convergentTrapezoidal Rule is order 2 convergent
Convergence Analysis Order-p Convergence

Multistep Methods – Convergence Analysis
Two types of error
made.been haserror previous no assuming ,solution theof value
exact theand ˆ valuecomputed ebetween th difference theis
at methodn integratioan of (LTE)Error Truncation Local The
1
1
1
)x(t
x
t
l
l
l
exactly.known iscondition
initial only the that assuming ,solution theof value
exact theand ˆ valuecomputed ebetween th difference theis
at methodn integratioan of (GTE)Error Truncation Global The
1
1
1
)x(t
x
t
l
l
l

• For convergence we need to look at max error over the whole time interval [0,T]– We look at GTE
• Not enough to look at LTE, in fact:– As I take smaller and smaller timesteps t, I would
like my solution to approach exact solution better and better over the whole time interval, even though I have to add up LTE from more timesteps.
Multistep Methods – Convergence Analysis
Two conditions for Convergence

1) Local Condition: One step errors are small (consistency)
2) Global Condition: The single step errors do not grow too quickly (stability)
Typically verified using Taylor Series
All one-step methods are stable in this sense.
Multistep Methods – Convergence Analysis
Two conditions for Convergence

Definition: A one-step method for solving initial value problems on an interval [0,T] is said to be consistent if for any A and any initial condition
1ˆ0 as t 0
x x t
t
One-step Methods – Convergence Analysis
Consistency definition

Forward-Euler definition
22
2
0()
2 0
dxtdxxtxt
dtdt
Expanding in about zero yields t
1ˆ00 xxtAx
Noting that (0)(0) and subtractingd
xAxdt
22
12 ˆ
2
tdxxxt
dt
Proves the theorem if
derivatives of x are bounded
0,t
One-step Methods – Convergence Analysis
Consistency for Forward Euler

Forward-Euler definition
1l
xltxlttAxlte
Expanding in about yields tlt 1
ˆˆ ˆlll
xxtAx
where is the "one-step" error bounded byl
e
2
2
[0,]2 , where 0.5maxl
T
dxeCtC
dt
One-step Methods – Convergence Analysis
Convergence Analysis for Forward Euler

ˆ Define the "Global" errorll
Exxlt
1ˆˆ 1
lllxxltItAxxlte
Subtracting the previous slide equations
Taking norms and using the bound on l
e
1 lllEItAEe
2 1
21
ll
l
EItAECt
tAECt
One-step Methods – Convergence Analysis
Convergence Analysis for Forward Euler

Example
+-
I1
R
C
V2
VS
V1
SVV
IVR
VR
VRdt
dVCV
R
2
121
21
1
011
011
Sk
kkk
kk
kk
Sk
kkk
kkk
k
VV
IVR
VR
t
VCV
Rt
VCV
R
VV
IVR
VR
VRt
VVCV
R
21
11
21
11
12
1
111
1
21
11
21
11
21
1111
1
011
11
011
011
BE
Sk
kkk
kk
kk
Sk
kkk
kkk
k
VV
IVR
VR
VRt
VCV
Rt
VC
VV
IVR
VR
VRt
VVCV
R
2
121
21
11
1
2
121
211
11
011
11
011
011
FE

Conclusions
• Introduced basic non-linear equation solution techniques– How to get good initial points?– Is it efficient?
• Introduced basic differential eqns solution techniques– Stability?– How to choose time-step– Stiffness– Other methods?