slovak terrestrial reference frame sktrf 2001 and 2nd order of kinematic terrestrial reference...
TRANSCRIPT

205
1 Matej Klobušiak, Katarína Leitmannová, Štefan Priam, Dušan Ferianc Geodetic and Cartographic Institute Bratislava, Chlumeckého 4, SK - 827 45 Bratislava,Slovakia. Tel.: +421-7-43336188, e-mail: [email protected], [email protected], [email protected], [email protected]
Slovak Terrestrial Reference Frame SKTRF 2001 – Its Computation and Connection to the EUREF –
M. KLOBUŠIAK, K. LEITMANNOVÁ, Š. PRIAM, D. FERIANC1
AbstractGlobal positioning reference basis ETRS89, its model realizationprocess on the territory of Slovakia by means of the SlovakTerrestrial Reference Frame SKTRF 2001 and its officialconnection to the EUREF points. Description of SKTRF as ahomomorph model of a dynamic, stochastic, stage-by-stage builtspatial geodetic network. Effective connection of stochastic,spatial and dynamic structures, with minimum loss ofinformation obtained by GPS measurement with emphasis onthe estimate of parameters and their linear functionals of the1st and 2nd order of kinematic terrestrial reference frame.
1. IntroductionIn geodetic practice the building of new geodetic controlas far as its quality and significance are concerned, whichfulfils most strict scientific requirements for the quality ofinformation and unity in world-wide, that is also in theEuropean extent, means a significant event and challengewhich only rarely occurs. This challenge is to build a service,which will allow the positioning of objects and phenomenain real time with high precision and reliability in theEuropean Terrestrial Reference System ETRS 89. SlovakTerrestrial Reference Frame SKTRF is also one of systematicsteps towards such service.
2. Slovak Geodynamic Reference Network –SGRN
Basis of Slovakia’s geodynamics research are repeated GPSmeasurements on the points of Slovak GeodynamicReference Network (SGRN). Essentially it is about geo-kinematics, because for the research of geodynamics alsoforces effecting the given points should be researched.Repeated measurements on SGRN points were carried outin GPS observation campaigns SGRN ’95, ’98, ’99, ’00 and’01. They are described in detail in 2.2.
SGRN points are divided into the points of SGRN PermanentObservation Station (SPOS) and the points of SGRN EpochObservation Station (SEOS). At present there are 47 SGRNpoints, three of which are SPOS points (MOPI-EPN, BBYS,PRES), the GANO point is being prepared as a point ofpermanent observation, in perspective to be included inEUREF Permanent Network (EPN) and 44 SEOS. Theirconfiguration is given in the figure below fig. 1.
2.1 Establishing SGRN Points
SGRN points are located preferably in rock coming aboveto the ground and continuously passing into bedrock. Inchoosing such rock there was a close co-operation with ageologist. Into chosen rock special modules enabling forcedcentering of GPS antennas are permanently imbedded, whichallows the elimination of centering error. In region withoutbedrock exceptionally also in-depth-embedded pillarsestablished for other purposes, or markings of controlstations by an iron bar nailed down were chosen. The depthof pillar’s base or iron bar’s nailing-down is 4 m as aminimum. To the top part of the pillar and the last part ofthe bar also centering modules for forced centering of GPSantennas were fixed. Sites of chosen rocks, pillars and ironbars meet the requirements for high-quality measurement,namely: undisturbed reception of signals from GPS satellitesat elevation angle larger than 15o, access to the point by aterrain car.
2.2 Description of GPS Measurement Campaigns
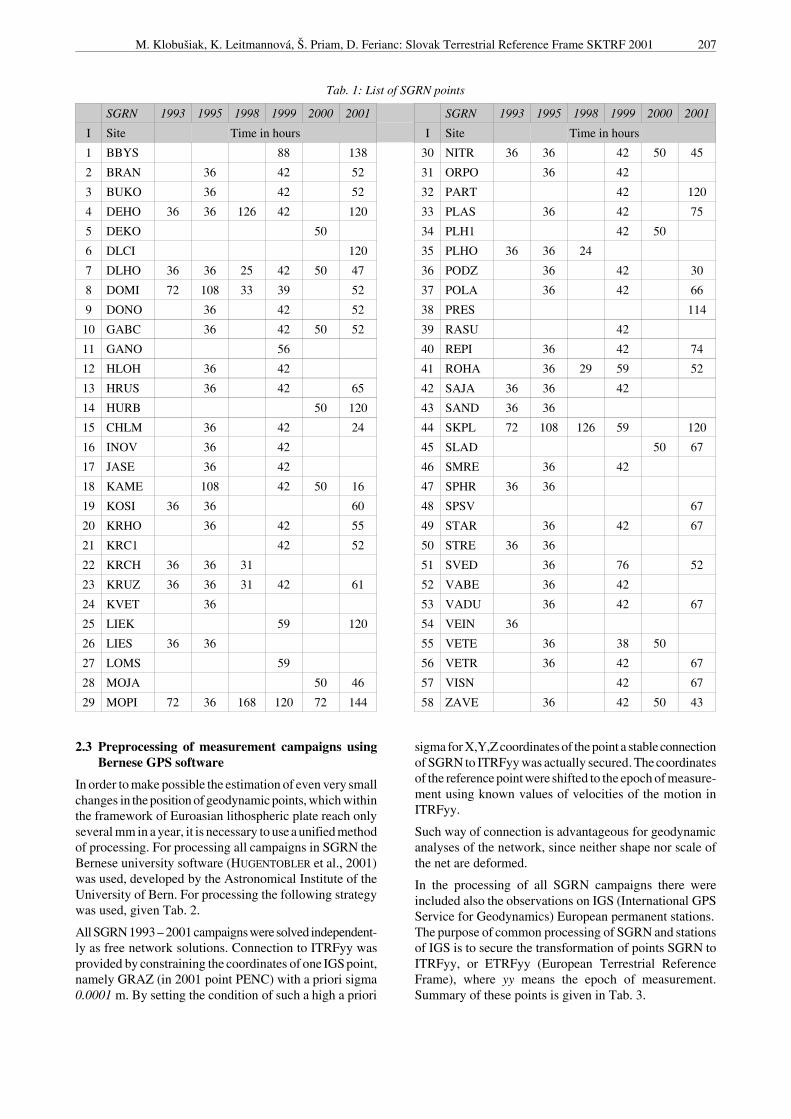
Since 1993, when the first measurement in SGRN networkwas carried out, repeated measurements were performedin 1995, 1998, 1999, 2000 and 2001. List of points measuredin single years is given in tab. 1.
SGRN campaign 1993
SGRN 93 measurement took place from 30 to 31 Augustand from 2 to 3 September 1993 on 17 points. The observa-tion sessions lasted for 36 hours. For the measurement therewere used exclusively equipments Trimble 4000 SST and4000 SSE, antennas of the TRM14532.00 type. Processingresults are given in (HEFTY, 1996).
SGRN campaign 1995
Since the number of 17 points from 1993 was not sufficientto cover the territory of Slovakia, in 1995 the network wasdensed to 42 points. During 26 September-5 October 1995and 14-15 November 1995 the measurement of these pointswas carried out. There were used again only Trimble 4000SST, 4000 SSE and 4000 SSi instruments and two typesof antennas – TRM14532.00 and TRM22020.00+GP. Theobservation sessions lasted for 36 hours. Processing resultsare given in (HEFTY, 1996).

206 Improvements and extensions of EUREF - Adoptions of ETRS89
Fig. 1 Configuration of SGRN points
SGRN campaign 1998
Within the EXTENDED SAGET 98 international projectmeasurement took place continuously on three SGRN points,namely: DEHO, SKPL and MOPI. This period of 26 June-1July 1998 was used for measurement on certain points ofSGRN. However, due to a small number of GPS instrumentsonly 9 points were measured. The points were chosen inthe way that allows repeated measurement of those whichalready had been determined in SGRN 93. Length of obser-vation session was 24 – 30 hours. For the measurement theTrimble receivers 4000 SSE, 4000 SSi with antennasTRM22020+GP were used. Processing results are givenin (LEITMANNOVÁ, 1998).
SGRN campaign 1999
In the period 20 – 24 September 1999 the SGRN 99measurement was carried out. 42 points were measured,the length of observation session was 42 hours. For themeasurement there were again used receivers Trimble 4000SST, 4000 SSE and 4000 SSi with TRM14532.00 andTRM22020.00+GP antennas. Processing results are givenin (LEITMANNOVÁ, 2000).
SGRN 2000 campaign
In the period 3 – 5 May 2000 and 25 – 27 July 2000 twocampaigns of a smaller extent were carried out in the westernpart of the Slovakia territory, aimed at positioning four new
SGRN points, namely: DEKO, HURB, MOJA and SLAD.Length of observation session was 50 hours. For themeasurement there were used receivers Trimble 4000 SSEand 4000 SSi with TRM22020+GP and TRM33429.00+GPantennas. Processing results are given in (LEITMANNOVÁ,2001).
SGRN 2001 campaign
SGRN 2001 campaign was carried out in the period 18 –23 June 2001, when at the same time an internationalcampaign CEGRN’01 was taking place within the CentralEuropean Regional Geodynamic Projects (CERGOP). Fromthe territory of Slovakia five SGRN points participate inthis project. Since 1994 they have been points: MOPI, SKPL,DEHO (in CERGOP it is designated as STHO) and since1999 PART and DLCI (in CERGOP designated as KAME).In the campaign 38 SGRN points with the length of observa-tion session 52 – 65 hours were measured. There were usedreceivers Trimble 4000SSE, 4000SSi and 4700 withTRM14532.00, TRM22020.00+GP, TRM33429.00+GP,TRM39105.00 and TRM41249.00 antennas. In order toeliminate uncertainties of a real position of the antenna phasecentre the antennas were rotated through 180o in the middleof the measurement (except for the points measured withinthe framework of CERGOP) (LEITMANNOVÁ, KLOBUŠIAK
2001). Processing results are given in (LEITMANNOVÁ,2002).
M. Klobušiak, K. Leitmannová, Š. Priam, D. Ferianc: Slovak Terrestrial Reference Frame SKTRF 2001 207
Tab. 1: List of SGRN points
SGRN 1993 1995 1998 1999 2000 2001 SGRN 1993 1995 1998 1999 2000 2001
I Site Time in hours I Site Time in hours
1 BBYS 88 138 30 NITR 36 36 42 50 45
2 BRAN 36 42 52 31 ORPO 36 42
3 BUKO 36 42 52 32 PART 42 120
4 DEHO 36 36 126 42 120 33 PLAS 36 42 75
5 DEKO 50 34 PLH1 42 50
6 DLCI 120 35 PLHO 36 36 24
7 DLHO 36 36 25 42 50 47 36 PODZ 36 42 30
8 DOMI 72 108 33 39 52 37 POLA 36 42 66
9 DONO 36 42 52 38 PRES 114
10 GABC 36 42 50 52 39 RASU 42
11 GANO 56 40 REPI 36 42 74
12 HLOH 36 42 41 ROHA 36 29 59 52
13 HRUS 36 42 65 42 SAJA 36 36 42
14 HURB 50 120 43 SAND 36 36
15 CHLM 36 42 24 44 SKPL 72 108 126 59 120
16 INOV 36 42 45 SLAD 50 67
17 JASE 36 42 46 SMRE 36 42
18 KAME 108 42 50 16 47 SPHR 36 36
19 KOSI 36 36 60 48 SPSV 67
20 KRHO 36 42 55 49 STAR 36 42 67
21 KRC1 42 52 50 STRE 36 36
22 KRCH 36 36 31 51 SVED 36 76 52
23 KRUZ 36 36 31 42 61 52 VABE 36 42
24 KVET 36 53 VADU 36 42 67
25 LIEK 59 120 54 VEIN 36
26 LIES 36 36 55 VETE 36 38 50
27 LOMS 59 56 VETR 36 42 67
28 MOJA 50 46 57 VISN 42 67
29 MOPI 72 36 168 120 72 144 58 ZAVE 36 42 50 43
2.3 Preprocessing of measurement campaigns usingBernese GPS software
In order to make possible the estimation of even very smallchanges in the position of geodynamic points, which withinthe framework of Euroasian lithospheric plate reach onlyseveral mm in a year, it is necessary to use a unified methodof processing. For processing all campaigns in SGRN theBernese university software (HUGENTOBLER et al., 2001)was used, developed by the Astronomical Institute of theUniversity of Bern. For processing the following strategywas used, given Tab. 2.
All SGRN 1993 – 2001 campaigns were solved independent-ly as free network solutions. Connection to ITRFyy wasprovided by constraining the coordinates of one IGS point,namely GRAZ (in 2001 point PENC) with a priori sigma0.0001 m. By setting the condition of such a high a priori
sigma for X,Y,Z coordinates of the point a stable connectionof SGRN to ITRFyy was actually secured. The coordinatesof the reference point were shifted to the epoch of measure-ment using known values of velocities of the motion inITRFyy.
Such way of connection is advantageous for geodynamicanalyses of the network, since neither shape nor scale ofthe net are deformed.
In the processing of all SGRN campaigns there wereincluded also the observations on IGS (International GPSService for Geodynamics) European permanent stations.The purpose of common processing of SGRN and stationsof IGS is to secure the transformation of points SGRN toITRFyy, or ETRFyy (European Terrestrial ReferenceFrame), where yy means the epoch of measurement.Summary of these points is given in Tab. 3.

208 Improvements and extensions of EUREF - Adoptions of ETRS89
Tab. 2: Processing strategy
interval of measure-ments
30s
precise orbits 1993-1999; precise orbits from CODE, parameters of Earth rotation (IERS), since 2000: precise orbitsof final IGS with corresponding parameters of the Earth rotation
tropospherical effects 1993-1999; Saastamoinen’s a priori model and estimate of one troposphere zenith-delay parameter forevery point with 2-hour interval and a priori sigma 0.10 m for absolute and 0.01 m for relative parameterssince 2000: unused a priori model of troposphere, total trop. parameters in zenith estimated using dry-Niellmapping function for every 2-hour interval with a priori sigma 5m for absolute and 5m for relative para-meters,option used for observations: elevation-dependent weighting cos 2 (z)since 2001: for IGS points included into the processing a troposphere model from the CODE global solution
ionospherical effects elimination using linear combination L3
corrections of antennaphase centres (APC)
known models of eccentricities and variations from the file phas-igs.01 were appliedftp://igscb.jpl.nasa.gov/igscb/station/general/igs 01.pcvhttp://www.grdl.noaa/GRD/GSP/Projects/ANTCAL/Files/ant.-info.003
since 2000 for antennas tested at GCI our own values of eccentricities APC were applied
ambiguity solutions estimate of integer values of ambiguities using Quasi Ionosphere Free (QIF) method for each singlebaseline from all observations, then ELIMIN for all-day solution also from every observationSAMPLING RATE:0
correlations option for correct modelling of correlations was used
estimate of unknownparameters
independent solution for every day of measurement using GPSEST program, combination of normalequations from daily solutions to the common solution of the whole campaign using ADDNEQprogram
Tab. 3: IGS sites used for connection SKTRF to ITRF
Id.Name of
pointCountry SGRN 93 SGRN 95 SGRN 98 SGRN 99 SGRN 2000 SGRN 2001
BOR1 Borowiec Polsko X X X
GOPE Pecný Cesko X X
GRAZ Graz Rakúsko X X X X X X
JOZE Jozefoslaw Polsko X X X X X X
KOSG Kootwijk Holandsko X X
MATE Matera Taliansko X X X
METS Metsahovi Fínsko X X X
ONSA Onsala Švédsko X X X X
PENC Penc Malarsko X X
UZHL Uzhorod Ukrajina X X
WETT Wettzell SRN X X
WTZR Wettzell SRN X X
3. Slovak Terrestrial Reference Frame –SKTRFyy
Every geodetic network laid-out both on the Earth’s surfaceand underground is effected by geodynamic forces. Oncethis fact is not taken in account, motions of the points willbe interpreted as measurement errors. For simultaneous
effective estimate of motion equations and coordinates ofthe control points measured using GPS technology a mathe-matical model (KLOBUSIAK, 1997c), (HEFTY, 1998c) and(ROGOWSKI, HEFTY et al. 1998), (HEFTY, 2001) and its rea-lization using the WIGS program system (K LOBUSIAK,1995-2002) have been proposed. The procedure describesfactors considered in the mathematical model, their para-

M. Klobušiak, K. Leitmannová, Š. Priam, D. Ferianc: Slovak Terrestrial Reference Frame SKTRF 2001 209
meters, and there are formulated equations of functionaldependence of measured quantities on the parameters ofthe mathematical model and their co-variance matrix. Fromthe above-mentioned papers there was set-up a completemathematical model of the effective estimate of the coor-dinates of newly-determined points, of local motions ofrepeatedly measured non-identical points, of the estimateof nuisance parameters of a systematic effect of the deter-ministic character of every single campaign and of correc-tion parameters of points eccentricity, if they have occurred.
3.1 Mathematical Model of Creating SKTRF
In building a national representative of a kinematic terrestrialreference frame in ETRS89 system there has been respectedthe fact that an object on which the system is realized usingreference points (SGRN) is a dynamic one. In realizing thenational kinematic terrestrial reference frame the motionof the points has been considered in respect of time.
Another problem that has been respected is a stochasticphenomenon of the xTRFyy terrestric frame. The coordinatesof reference points are, in addition to temporal dependence,also random quantities.
We are forced to build National Spatial Network (NSN)stage-by-stage (K UBICEK, 1986) because it is to beextended (FERIANC, 2000) on the territory of Slovakia inthe density and quality required. Results must be the sameas if NSN would have been built at the same time. Basiccriterion of NSN building was jointed effectivity,reliability and unbiasedness.
Description of a dynamic, stochastic, stage-by-stagebuilt model of the kinematic frame
Basis of the kinematic terrestrial reference frame descrip-tion is a definition of the mathematical model of geodeticnetwork (GN), fulfilling all modern probabilistic require-ments. Model (1) gives a description and a model of allimportant conceptual factors of the network.
In 1978 Kubicek described a mathematical model of amodern GN (K UBICEK 1978, p. 64). Analogy of the sto-chastic modelling of information in GN given inreferences that are not entirely complete (KUBICKOVI,KUBICEK, KUKUCA 1982), (KUBICEK, PIZMAN 1979),(KUBICEK 1983), (KUBICEK, KUBICKOVI, VOLAUFOVI
1995) was applied also in the definition of a homomorphicmodel of a dynamic, stochastic, stage-by-stage builtSKTRF. For its description the following model wasapplied
[ ]{ }F,, ,N, ,U, síiiiii
00=βξζκ ,h (1)
where k/ Î Â6n is a configuration vector k/ = (X/1, Y/1, Z/1,rX1, rY1, rZ1, ... , X/n, Y/n, Z/n, rXn, rYn, rZn)¢ defined by atleast appoximate 3D coordinates of GN points and bytheir annual velocities, h: Â6n ® Âm where representationof Q = h(k), by which to the real coordinates of GN pointsk = k/ + dk a vector parameter of the network Q = (Q1, ..., Qm)¢ is added using function h, Ui is an identification setfor i-epoch, i = 0, 1, ... ,s, while if i=0 it is a chosenreference frame xTRFyy and if i=1, ... , s , they arecampaigns of GPS observations, zi is a structure, design,project of i-epoch, whose spectrum Sp(zi) defines a set ofthe GN nodes that are simultaneously observed using GPStechnology, Ni is a natural number indicating the numberof performed measurements for each stage, or the lengthof observation (time investment, or "sampling rate"), xi isa random vector obtained by processing i-campaign ofGPS as a free network (KLOBUŠIAK 1996), (BROCKMANN
1997), (ROGOWSKI, HEFTY a i. 1998), bi: Âti ® Âmi is a
representation that defines the method of processing andconnecting GPS campaigns, if in estimates bi instead ofQ(0), Q(1), Q(2), ... , Q(i) the estimates are used, b0(x0), b1(x1,b0), b2(x2, b1), ..., bi(xi, bi-1), since if conditions of linearity,jointed effectivity and unbiasedness are observed it mustbe valid that (KUBICEK 1986, p. 96) bi(xi, bi-1) = b(x0, x1,x2, ... , xi), F is a class of parameter Q, functions whichmay be considered in using SKTRF (positioning,kinematics, geodynamics etc.).
In this place we would also like to mention the SKTRFmathematical model defined in this way allows the fullstudy and use of the structure z optimum, b estimateoptimum and reliability of the SKTRF as a stochasticmodel. Estimates of the parameters values Q will alwaysbe considered as a realization of this stochastic object.
Motion of a point and its functional expression inxTRFyy frame
Background of the GPS campaigns processing carried outin Slovakia and their connection to the internationalreference frame xTRFyy (where x Î {I, E, C}, yy is anepoch of the reference frame, I means International, E-Europe, C-Central Europe) must be the acceptance of akinematic model of the network as a minimum. xTRFyyrepresents the realization of such model and therefore itrepresents a kinematic and stochastic large-spacestandard. Using Fig.2 there is represented a schematic ideaof connecting new GPS campaign to a kinematic standardrespecting its above-given characteristics.
The aim is to describe the motion of a point with a motionequation. Significance of the point motion is modelled inkinematic models. It means in the models in which we areinterested only in direction and magnitude of the motion.Reason of this motion cannot be stated by such model.

210 Improvements and extensions of EUREF - Adoptions of ETRS89
~βk(3)
ρk
~Θj(2)
~Θj(1)
{s}j.ϑ
Θj(3)
Θj(1)
δνj Ξ
Θj(2)
Θj
t0
~Θi(1)
~Θ i(2)
~Θ i(3)
νi
Θi
Θi(2)
Θi(3)δνi
{s}i.ϑ
Θi(1)
βk0(2) βk0
(3)
βk(1)
βk(3)
βk(2)
Θi0(1) Θi0
(2) Θi0(3)
βk
δρi
{s}k.ϑ
βk0(1)
νi0
ρk0
νj
Θj0(1) Θj0
(2) Θj0(3)
t s
νi
νj0
Fig. 2 Connection of a campaign to the points of a kinematic standard
From the Fig.2 the motion equations of three points i,j,krepresented by parameters Qi, Qj, bk are evident.
( )( ) { } [ ] ( )s
ststst
tiii,.iiisii
~Ett ΘξεδννΘξ =⇒+++−+= ϑS00
(2)( )( ) { } [ ] ( )s
ststst
tjjj,.jjjsjj
~Ett ΘξεδννΘξ =⇒+++−+= ϑS00
( ) ( )( ) { } [ ] ( )s
ststst
tkkk,.kkkskkk
~Ett βξεδρρδββξ =⇒+++−++= ϑS00
0
where
is a GPS campaign determined in the epoch ts as a freeΞ t s
network solution represented by the vector of coordinates stξ
and its global co-variance matrix (GCM) Sx , E[x] is anoperator of the mean value of the random variable x, ( )st
i~Θ
are the coordinates of the global position of the referencepoint determined in time ts, are the coordinates of the( )st
iΘ
local position of the reference point determined in time ts, ( )st
k~β
are the coordinates of the global position of the pointdetermined in time ts, are coordinates of the local( )st
kβposition of the point determined in time ts, is a measuredξ
quantity , is a reference coordinate of the point i, j inj,iΘ
the defined reference frame xTRFyy, is the point( )kk ββ δ+0
k coordinate being newly determined, t0 and ts is a basic timeof the reference frame (epoch t0) and the time of s-epochobservation, is a model motion of the points i, j of the0
j,iν
reference frame determined from the model NNR-NUVEL1A, is a local-differential motion of the pointsδν i j,
i, j with respect to the model motion , is0j,iν iii ννν δ+= 0
a reference frame point global motion, is a new point0kρ
model motion, is a new point local-differential motionkρδ
estimated from repeated measurements, S is an effectϑ(using orthogonal transformation) of the connection of twonon-identical realizations of reference systems of campaignsx and reference frame Q, e is a measurement error, i, j =1,2,..., p are indexes of the reference frame points, where p isa number of the reference frame points and finally k = 1,2,... ,r is an index of the point being newly determined, wherer is a number of points being newly determined.
Factors considered in the mathematical model of anational kinematic terrestrial reference frame and theirparameters
1. Coordinates of reference points in the defined epoch e.g.ITRF96 epoch 1997.0, ITRF2000 epoch 1997.0, ETRF93epoch 1989.0, ETRF89 epoch 1989.0, CETRF94 epoch1995.42 and the like. Parameter Q.
2. Reference point motion equations (velocities) definedby the reference frame xTRFyy. Parameters n. Theparameter of velocity can be divided into a model velocityof the whole tectonic lithospheric plate from NNR-NUVEL1A n/ and a local velocity (differential motion)of the point dn. It is valid n = n/+ dn.
3. Estimated velocities of non-identical points r. The vectorof the global velocity of non-identical points r can bedivided into the sum of model r/ and local-differential

M. Klobušiak, K. Leitmannová, Š. Priam, D. Ferianc: Slovak Terrestrial Reference Frame SKTRF 2001 211
velocity dr , r =r/ + dr.
4. Estimate of the coordinates XYZ of non-identical points.Parameter b.
5. Transformation of the j-epoch of the network, which hasbeen obtained by processing the measurement campaignas a free network, into a reference frame, e.g. xTRFyy.Transformation parameters Jj are nuisance parameters.It is possible to use orthogonal 7, 6, 4, 3 parametricsimilar transformation. Parameters Jl and Jk , where l =0, 1, ... , s, k = 0, 1, ..., s & l ¹ k are mutually independent,i.e. parameters Jl or Jk have impact only on the parametersQ, b, r, n of the epoch l or k.
6. Uncertainty in determining the centricity of the point.In case in some epochs there was the influence resultingin the eccentricity of the point, then such an inconsistencyof the non-identity of the point is modelled by unknownparameters of eccentricity c (KLOBUŠIAK 1996, 1997a,b),(HEFTY 1998c, 2001).
Equation of the i-campaign measured quantitiesfunctional dependence on the parameters of a kinematicmodel and its co-variance matrix
,iiii εγτξ ++= LF (3)
where i = 0, 1, 2, ... , s is a designation of epoch ; Fi = [Xi,Di ], Li = [Ri, Bi, Si, Ki], t¢ = (Q¢, n¢), gi¢ = (r¢, bi¢, Ji¢,ci¢). It is valid t = t/ + dt a gi = g/i + dgi .
Now if a model global motion taken from the model NNR-NUVEL1A is considered, then for parameters n and r it isvalid
n = n/ + dn a r = r/ + dr. (4)
The equation (3) can be re-written
. (5)iiiiii εγτγτξ +δ+δ++= LFLF oo
For co-variance matrix of the realizations vector xi gainedby the processing using Bernese GPS software (ROTHACHER,MERVART 1996) we obtain
. iiiiH2σ== ξε ΣΣ
The parameters t and their co-variance matrix St are definedby the reference frame xTRFyy epoch t/. For reference pointmotion realization it is valid (4), then for co-variance matrixof this vector it is valid , because n/ is aνν ΣΣ δ=deterministic component in our model.
The equation (5) will change to the form:
,iiiii εγτη ++= δδ LF (6)
where.oo γτξη iiii LF- −= (7)
For covariance matrix of a reduced random vector
we obtainη i
.( ) ( )ξττξΣτξη ,Cov,Cov iiFFFF −−′+= ΣΣ (8)
Purism in computing GCM and its specific characteristics
with emphasis on a minimum loss of statistical informationis not an end in itself (KLOBUŠIAK, 1999a p. 6-8).
A complete mathematical model of an efficient estimateof newly-determined point coordinates, local motionsof repeatedly measured non-identical points, nuisanceparameters of the systematic influence of deterministiccharacter of every campaign and point eccentricitycorrections
A complete model is based on the efficient stochastic modelof the networks connection (KLOBUŠIAK, 1996, 1997, 1998,1999) and its extension with additional factors. The completemathematical model is described as follows
, (9)εγτξ ++= LF
where for covariance matrix of the vector of realizations
it is validξ
. (10)Σ ξ = σ 02H
Structure and dimensions of the matrixes and vectors usedare:
F = [X, D], L = [R, B, S, K], t¢ = (Q¢, n¢),
, ; ,( )χϑβργ ′′′′=′ ,,, ( )s10 ,.....,, ξξξξ ′′′=′ ∑=
=ℜ∈s
ii
m mm,0
ξ
, , ;[ ]s10 ,.....,, XXXX ′′′=′ X ∈ Mm p, p,mi iM∈X
& , [ ]s10 ,.....,, DDDD ′′′=′ D D0 0= ∈; ,M m u
; [ ]s0 ,.....,, RRRR ′′′=′ 1 R R0 0= ∈; ,Mm r r,mi iM∈R
, , ;[ ]s1 ,.....,, BBBB ′′′=′ 0 B ∈M m n, n,mi iM∈B
& ,( )s10 ,.....,,Diag SSSS ′′′=′ S 0 S0 = ∈; ,Mm t
; & ,ii t,mi M∈S [ ]s10 ,.....,, KKKK ′′′=′ ;0 0K = k,mM∈K
, , ,k,mi iM∈K ( )sskkkDiag HHHH ,.....,, 1100= mm ,S∈H
, where , qi is used “sampling rate”ii m,mi S∈H ( )22
0iii qk σσ=
; , ; ( )s,.....,, ββββ ′′′=′ 10 ∑=
=ℜ∈s
ii
n nn,0
β ( )s,.....,, ϑϑϑϑ ′′′=′ 10
& is not defined, , , i=0,1, ... , s.0ϑ′ ∑=
=ℜ∈s
ii
t tt,1
ϑ iti ℜ∈ϑ
Description of the model objects meanings (9): i is an epochof the group points measurement, i = 0 is a basic epoch of thereference frame xTRFyy, i = 1, 2, ... , s are epochs of therepeated measurement of points, Xi (mi , p) is a design matrixcreating the relations between a random vector xi and theparameters of identical points Q, mi is a number of realizationsin i-epoch, p is a number of the identical points parameters, Di
(mi , u) is a design matrix creating the relations between thevector xi and the parameters of defined velocities n on identicalpoints, u is a number of defined velocities parameters, Ri (mi,r) is a design matrix creating the relations between the obser-vation vector xi and the parameters of chosen points motionequations r, r is a number of all annual velocities parameters,r(r) is a vector of the motion equations parameters and it is theaim of effective estimate, Bi (mi , ni) is a plan matrix creatingthe relations between the vector xi and the parameters (coordi-nates) of non-identical points. Non-identical points result fromdensifying the existing set of points, ni is a number of the non-identical points parameters of i-epoch, Si (mi, ti) is a designmatrix of the campaigns transformation-connection with targetreference frame, creating the relations between the vector xi
and the transformation parameters Ji . As transformation

212 Improvements and extensions of EUREF - Adoptions of ETRS89
relations can be taken an orthogonal 7, 6, 4, 3 element similartransformation, ti is a number of transformation parameters.Every epoch can have different number of parameters estimated.In general it can be valid that ti ¹ tj, Ki (mi , k) is a design matrixof i-epoch creating the relations between the vector xi and theeccentricity parameters of point c, k is a total number ofeccentricity parameters, Hi is co-factor matrix of the randomvector’s xi GCM, ki expresses the ratio of the i-campaigndispersion
with a product of the reference frame dispersion 2iσ ( )2
0iq σand the coefficient qi, where qi is a coefficient eliminatingdifferent “sampling rate”.
1. SKTRF 2001 Points Coordinates and Annual VelocitiesDetermination
The SGRN kinematic terrestrial reference frame 2001 (SKTRF2001) represents part of a spatial reference system. For (NSN)
and additional positioning purposes it is under stood as apositioning standard. It is created from connecting, or trans-forming the solution of SGRN to the ITRFyy and then tothe ETRFyy.
All repeated epoch measurements on the points of SGRNcarried out in the period 1993-2001 were entered in thecommon processing of the estimate of coordinates andannual velocities of points in one model. They are especiallythe campaigns (see Tab. 4). – SGRN 1993 – 2001 (6x), – CEGRN 1994 – 2001 campaigns (6x) (H EFTY, 2001) – TATRY 1998 – 2001 campaigns (4x) – a local geo-
dynamic network, – WHS 2001 campaign (1x) (World Height System).
Tab. 4: GPS campaigns on SGRN points
ProjectEpoch of mea-
surement tLength of obser-vations in hours
Number of SGRNpoints
Reference frame Reference point
ITRF2000 1997 permanent ITRF2000
SGRN’93 199366 36 17 ITRF94 GRAZ
CEGRN‘94 1994.34 120 3 ITRF92 GRAZ
CEGRN‘95 199541 120 3 ITRF92 GRAZ
SGRN‘95 199574 36 42 ITRF94 GRAZ
CEGRN‘96 199645 120 3 ITRF94 GRAZ
CEGRN‘97 199743 120 3 ITRF94 GRAZ
SGRN‘98 199848 24 – 30 15 ITRF96 GRAZ
TATRY‘98 199867 72 6 ITRF96 ROHA
CEGRN‘99 199945 120 5 ITRF97 GRAZ
SGRN‘99 199972 42 42 ITRF97 GRAZ
TATRY‘99 1999.73 72 6 ITRF97 ROHA
SGRN‘00-1st part 2000.34 48 6 ITRF2000 GRAZ
SGRN‘00-2nd part 200057 52 11 ITRF2000 GRAZ
TATRY‘00 200078 72 – 90 5 ITRF2000 ROHA
CEGRN‘01 200146 120 5 ITRF2000 GRAZ
SGRN‘01 2001.46 55 – 62 38 ITRF2000 PENC
TATRY‘01 2001.69 72 6 ITRF2000 ROHA
WHS‘01 2001.75 96 11 ITRF2000 PENC
CERGOP project is focussed on the long-term GPSmonitoring of tectonic processes in the Central Europeanregion by means of a high quality network of the CEGRNpoints. Five points from the SGRN network are part of theCEGRN network. By using CEGRN and SGRN in thecommon processing the more real estimate of a kinematicmodel of tectonic processes on the territory of Slovakia willbe obtained, related to the neighbouring territory of theCentral European region.
As a target reference system the ITRF2000, epoch 1997.0with the selected sub-set of points in Tab. 3 was used, inwhich mean values of the IGS points coordinates and theirmotion velocities are defined.
The processing was carried out in accordance with followingprinciples:1. all campaigns enter the processing as free network
solutions after the pre-processing using Bernese GPSsoftware with constraining the coordinates of one IGSpoint with a priori sigma 0.0001 m,
2. 7-parameter linear transformation for connecting freenetworks is used,
3. the target reference frame ITRF2000 epoch 1997.0 hasthe coordinates of IGS reference points (they act as astandard) fixed, but their inaccuracy considered in GCMis respected, which will influence the estimates of thenational reference frame points coordinates and theirRMS.
M. Klobušiak, K. Leitmannová, Š. Priam, D. Ferianc: Slovak Terrestrial Reference Frame SKTRF 2001 213
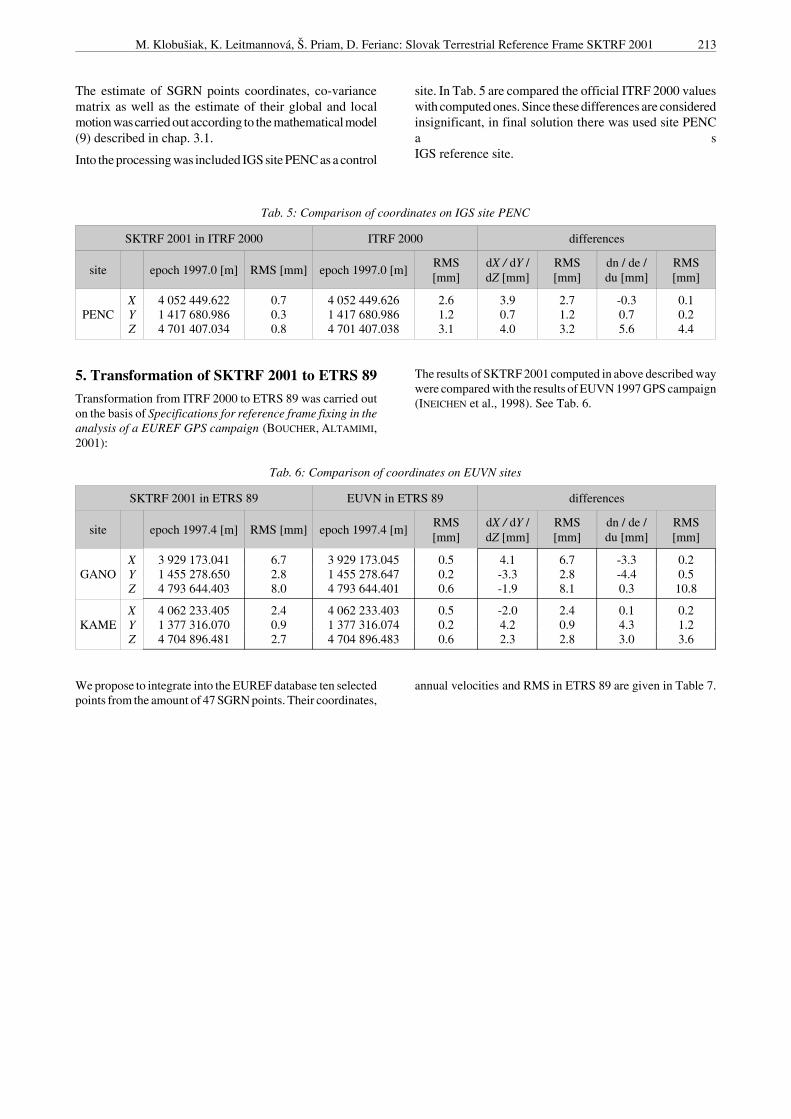
The estimate of SGRN points coordinates, co-variancematrix as well as the estimate of their global and localmotion was carried out according to the mathematical model(9) described in chap. 3.1.
Into the processing was included IGS site PENC as a control
site. In Tab. 5 are compared the official ITRF 2000 valueswith computed ones. Since these differences are consideredinsignificant, in final solution there was used site PENCa sIGS reference site.
Tab. 5: Comparison of coordinates on IGS site PENC
SKTRF 2001 in ITRF 2000 ITRF 2000 differences
site epoch 1997.0 [m] RMS [mm] epoch 1997.0 [m]RMS[mm]
dX / dY /dZ [mm]
RMS[mm]
dn / de /du [mm]
RMS[mm]
PENCX 4 052 449.622 0.7 4 052 449.626 2.6 3.9 2.7 -0.3 0.1Y 1 417 680.986 0.3 1 417 680.986 1.2 0.7 1.2 0.7 0.2Z 4 701 407.034 0.8 4 701 407.038 3.1 4.0 3.2 5.6 4.4
5. Transformation of SKTRF 2001 to ETRS 89Transformation from ITRF 2000 to ETRS 89 was carried outon the basis of Specifications for reference frame fixing in theanalysis of a EUREF GPS campaign (BOUCHER, ALTAMIMI,2001):
The results of SKTRF 2001 computed in above described waywere compared with the results of EUVN 1997 GPS campaign(INEICHEN et al., 1998). See Tab. 6.
Tab. 6: Comparison of coordinates on EUVN sites
SKTRF 2001 in ETRS 89 EUVN in ETRS 89 differences
site epoch 1997.4 [m] RMS [mm] epoch 1997.4 [m]RMS[mm]
dX / dY /dZ [mm]
RMS[mm]
dn / de /du [mm]
RMS[mm]
GANOX 3 929 173.041 6.7 3 929 173.045 0.5 4.1 6.7 -3.3 0.2Y 1 455 278.650 2.8 1 455 278.647 0.2 -3.3 2.8 -4.4 0.5Z 4 793 644.403 8.0 4 793 644.401 0.6 -1.9 8.1 0.3 10.8
KAMEX 4 062 233.405 2.4 4 062 233.403 0.5 -2.0 2.4 0.1 0.2Y 1 377 316.070 0.9 1 377 316.074 0.2 4.2 0.9 4.3 1.2Z 4 704 896.481 2.7 4 704 896.483 0.6 2.3 2.8 3.0 3.6
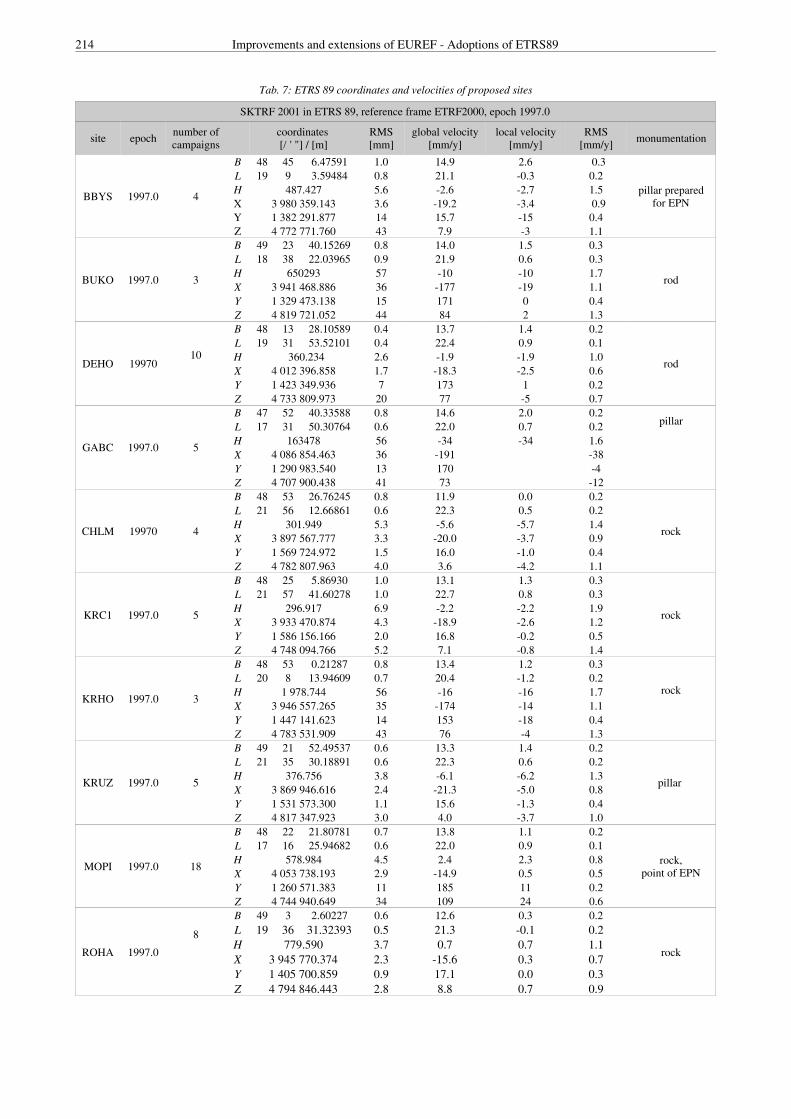
We propose to integrate into the EUREF database ten selectedpoints from the amount of 47 SGRN points. Their coordinates,
annual velocities and RMS in ETRS 89 are given in Table 7.
214 Improvements and extensions of EUREF - Adoptions of ETRS89
Tab. 7: ETRS 89 coordinates and velocities of proposed sites
SKTRF 2001 in ETRS 89, reference frame ETRF2000, epoch 1997.0
site epoch number ofcampaigns
coordinates [/ ' "] / [m]
RMS[mm]
global velocity[mm/y]
local velocity[mm/y]
RMS[mm/y] monumentation
BBYS 1997.0 4
B 48 45 6.47591 1.0 14.9 2.6 0.3
pillar preparedfor EPN
L 19 9 3.59484 0.8 21.1 -0.3 0.2H 487.427 5.6 -2.6 -2.7 1.5X 3 980 359.143 3.6 -19.2 -3.4 0.9Y 1 382 291.877 14 15.7 -15 0.4Z 4 772 771.760 43 7.9 -3 1.1
BUKO 1997.0 3
B 49 23 40.15269 0.8 14.0 1.5 0.3
rod
L 18 38 22.03965 0.9 21.9 0.6 0.3H 650293 57 -10 -10 1.7X 3 941 468.886 36 -177 -19 1.1Y 1 329 473.138 15 171 0 0.4Z 4 819 721.052 44 84 2 1.3
DEHO 1997010
B 48 13 28.10589 0.4 13.7 1.4 0.2
rod
L 19 31 53.52101 0.4 22.4 0.9 0.1H 360.234 2.6 -1.9 -1.9 1.0X 4 012 396.858 1.7 -18.3 -2.5 0.6Y 1 423 349.936 7 173 1 0.2Z 4 733 809.973 20 77 -5 0.7
GABC 1997.0 5
B 47 52 40.33588 0.8 14.6 2.0 0.2pillar
L 17 31 50.30764 0.6 22.0 0.7 0.2H 163478 56 -34 -34 1.6X 4 086 854.463 36 -191 -38Y 1 290 983.540 13 170 -4Z 4 707 900.438 41 73 -12
CHLM 19970 4
B 48 53 26.76245 0.8 11.9 0.0 0.2
rock
L 21 56 12.66861 0.6 22.3 0.5 0.2H 301.949 5.3 -5.6 -5.7 1.4X 3 897 567.777 3.3 -20.0 -3.7 0.9Y 1 569 724.972 1.5 16.0 -1.0 0.4Z 4 782 807.963 4.0 3.6 -4.2 1.1
KRC1 1997.0 5
B 48 25 5.86930 1.0 13.1 1.3 0.3
rock
L 21 57 41.60278 1.0 22.7 0.8 0.3H 296.917 6.9 -2.2 -2.2 1.9X 3 933 470.874 4.3 -18.9 -2.6 1.2Y 1 586 156.166 2.0 16.8 -0.2 0.5Z 4 748 094.766 5.2 7.1 -0.8 1.4
KRHO 1997.0 3
B 48 53 0.21287 0.8 13.4 1.2 0.3
rockL 20 8 13.94609 0.7 20.4 -1.2 0.2H 1 978.744 56 -16 -16 1.7X 3 946 557.265 35 -174 -14 1.1Y 1 447 141.623 14 153 -18 0.4Z 4 783 531.909 43 76 -4 1.3
KRUZ 1997.0 5
B 49 21 52.49537 0.6 13.3 1.4 0.2
pillar
L 21 35 30.18891 0.6 22.3 0.6 0.2H 376.756 3.8 -6.1 -6.2 1.3X 3 869 946.616 2.4 -21.3 -5.0 0.8Y 1 531 573.300 1.1 15.6 -1.3 0.4Z 4 817 347.923 3.0 4.0 -3.7 1.0
MOPI 1997.0 18
B 48 22 21.80781 0.7 13.8 1.1 0.2
rock,point of EPN
L 17 16 25.94682 0.6 22.0 0.9 0.1H 578.984 4.5 2.4 2.3 0.8X 4 053 738.193 2.9 -14.9 0.5 0.5Y 1 260 571.383 11 185 11 0.2Z 4 744 940.649 34 109 24 0.6
ROHA 1997.0
8
B 49 3 2.60227 0.6 12.6 0.3 0.2
rock
L 19 36 31.32393 0.5 21.3 -0.1 0.2H 779.590 3.7 0.7 0.7 1.1X 3 945 770.374 2.3 -15.6 0.3 0.7Y 1 405 700.859 0.9 17.1 0.0 0.3Z 4 794 846.443 2.8 8.8 0.7 0.9

M. Klobušiak, K. Leitmannová, Š. Priam, D. Ferianc: Slovak Terrestrial Reference Frame SKTRF 2001 215
3. Conclusion
By acceptance of the selected SGRN points with determinedspatial coordinates and annual velocities in SKTRF 2001epoch 1997.0 to the family of the EUREF points, forSlovakia will be fulfilled a basic authorization requirementusable in the common building of the European Spatial DataInfrastructure ESDI built on the Geographical InformationSystem’s technology and coordinated by the EuropeanCommission in ETRS 89.
By gradual rebuilding of the SGRN points to the SPOSpoints and by their gradual connecting to the EuropeanIntegrated Permanent Network the Slovak Permanent GNSSService can be started. This keeps the door open for us inbuilding the Integrated Global Geodetic Observation SystemIGGOS developed by IAG activities.
4. ReferencesBOUCHER C., ALTAMINI Z.:. Specifications for Reference Frame
Fixing in the Analysis of a EUREF GPS Campaign.ftp://ftp.epncb.oma.be/pub/general/papers/memo.pdf
FERIANC D. (2000): NSN – Principles of the activites in theNational spatial network. Bratislava, GCI 2000.
HEFTY J. (1996): Common analysis of SLOVGERENET 93 andSLOVGERENET 95. [Stage of a partial project IntegratedGeodetic Network], Bratislava, STU 1996.
HEFTY J., FROHMANN E. (1998): Definition and realization ofthe ETRS89 frame in Slovakia – problems and startingpoints. Proceedings of scientific papers on the 60thanniversary of the Faculty of Civil Engineering of theSlovak Technical University in Bratislava. Bratislava 1998.
HEFTY J. (1998A): Estimate of the three-dimensional non-lineartransformation parameters between S-JTSK and ETRS-89using the identical points of ŠAGS and ŠTS of the 1st orderand their analysis. [Stage 4e of IGS partial project],Bratislava, RIGC, 1998.
HEFTY J. (1998C): Estimate of site velocities from CEGRN GPScampaigns referred to CERGOP reference frame. Proceed-ing of the EGS symp. G16 "Geodetic and GeodynamicAchievements of the CEI". XXIII General Assembly ofthe European Geophysical Society. Nice, France, 20-24April 1998, pp. 67-79.
HEFTY J. (2000): Analysis of the methods of reducing theinfluence of troposhere in determining the geocentric coor-dinates in the regional and local campaigns, RIGC.
HEFTY J. (2001): Possibilities of improving the velocity estimatesfrom CERGOP campaigns. Proc. of the EGS G9 sym-posium "Geodetic and geodynamic programmes of theCEI", Reports on geodesy, WUT, Nice, France, 25-30March 2001, p. 71-81.
HUGENTOBLER U., SCHAER S. – FRIDEZ P. (2001): Bernese GPSSoftware Version 4.2. AIUB Bern 2001.
INEICHEN D., GURTNER W., SPRINGER T., ENGELHARDT G.,LUTHARDT J., IHDE J. (1998): EUVN 97 Combined GPSSolution. Presented at the EUREF-Symposium in BadNeuenahr-Ahrweiler, June 3-5, 1998.
KLOBUŠIAK M. (1996): Programs for the analysis of stabilityand unstability of GPS points, effective connection of GPSnetworks and calculation of transformation parameters.[Stage 4a of IGS partial project], Bratislava, RIGC, 1996.
KLOBUŠIAK M. (1997A): Testing the programs of effective con-nections of GPS networks and working-out technologies
of GPS network connection with respect to their precisioncharacteristics. [Stage 4e of IGS partial project],Bratislava, RIGC, 1997.
KLOBUŠIAK M. (1997B): Verifying programs for statisticalanalysis of the significance of the coordinates change andtheir arbitrary functions of the repeatedly measured GPSnetworks and working out the technology for the statisticaltesting of the change of mutual position of GPS points.[Stage 4b of IGS partial project], Bratislava, RIGC, 1997.
KLOBUŠIAK M. (1997C): Programs for the common processingof GPS, levelling and gravimetric measurements in thefirst approximation of the Earth, s gravity field. [Stage4c of IGS partial project], Bratislava, RIGC,1997.
KLOBUŠIAK M. (1998B): Programs for effective stochastictransformation (linear, quadratic, cubic) of trigonometricpoints in S-JTSK to ETRSyy. [Stage 4b of IGS partialproject], Bratislava, RIGC, 1998.
KLOBUŠIAK M. (1998C): Programs for the common processingof GPS, gravimetric and levelling measurements in the2nd approximation of the Earth, s gravity field (ellipsoid)as a basis for building the integrated geodetic network.[Stage 4c of IGS partial project], Bratislava1998.
KLOBUŠIAK M. (1998D): GPS measurements effective transfor-mation to the national systems S-JTSK and Bpv. In:Proceedings of scientific papers on the 60th anniversaryof the Faculty of Civil Engineering of the Slovak TechnicalUniversity in Bratislava. Bratislava STU 1998.
KLOBUŠIAK M. (1999A): Programs for simultaneous effectiveestimate of motion equations of control points and theircoordinates measured using GPS technology. [Stage 4aof IGS partial project], Bratislava, RIGC1999.
KLOBUŠIAK M. (1999B): Transformation of non-identical trigo-nometric points S-JTSK to ETRSYY. [Stage 4b of IGSpartial project], Bratislava, RIGC1999.
KLOBUŠIAK M. (1999C): Software for the common processingof GPS, gravimetric and levelling data. [Stage 4c of IGSpartial project], Bratislava, RIGC,1999, .
KLOBUŠIAK M. (2000): National Spatial network – a newpositioning phenomenon of Slovakia. In: Proceedings"Conference on 50th anniversary of the establishment ofGCI Bratislava, 28 September 2000, p 83-105.
KLOBUŠIAK M. 2001: Reversibility relation of the realizationsof two projection systems S-JTSK and ETRS 89. In:Proceedings "International Conference on Geodetic Net-works 2001", GCI, Podbanské 2001.
KLOBUŠIAK M. (1995-2002): WIGS – Integrated geodetic net-works, transformations, connection, comparison, calcula-tion of point velocities and transformations of S-JTSK toxTRSYY. (The WIGS 4. 2002 program system). Bratislava,RIGC & MaKlo, 1995-2002.
KUBICEK L. (1978): Mathematical model of geodetic network.In: Proceedings of the Conference "Modern methods ofBuilding Geodetic Control". SVTS, CVTS Bratislava, 26-27 January 1978 .
KUBICEK L. (1986): Multistage regression model. Apl. Mat.31:89-96, 1986.
KUBICKOVI I., KUBICEK L., KUKUCA J. (1982): Probability andStatistics in Geodesy and Geophysics. VEDA Publishinghouse of the Slovak Academy of Sciences, Bratislava,1982.
KUBICEK L., PIZMAN A. (1979): Statistical Methods in Measure-ment. VEDA Publishing house of the Slovak Academyof Sciences, Bratislava, 1979.

216 Improvements and extensions of EUREF - Adoptions of ETRS89
KUBICEK L. (1983): Basics of the Estimate Theory. VEDAPublishing house of the Slovak Academy of Sciences,Bratislava, 1979.
KUBÁCEK L., KUBÁCKOVÁ I., VOLAUFOVÁ J. (1995): Statisticalmodels with linear structures. VEDA Publishing houseof the Slovak Academy of Sciences, Bratislava 1995.
LEITMANNOVÁ K. (1998): SLOVGERENET 98 processing.Shortform executing project No. 103/98, project: A 19.95basic control. Other geodetic services in the maintainingand renewing of geodetic control (unpublished workingdocumentation). Bratislava, GCI.
LEITMANNOVÁ K. (2000): SLOVGERENET 1999. Technicalreport. Bratislava, GCI 1999.
LEITMANNOVÁ K., KLOBUŠIAK M. (2001): Elimination ofdisturbing factors in creating a national kinematic framefor NSN. In: Proceedings "International conference Geo-detic networks 2001". GCI, Podbanské 2001 .
LEITMANNOVÁ K.: (2001): Creating SGRN kinematic referenceframe SKRF2000. Technical report. Bratislava, GCI 2001.
LEITMANNOVÁ K. (2002): Creating SGRN kinematic terrestrialreference frame SKTRF2001. Technical report. Bratislava,GCI 2002.
ROGOWSKI M., HEFTY J. et al. (1998): Final results of CEGRNObservations Campaigns. Proc. of the EGS Symp. G16"Geodetic and geodynamic achievements of the CEI, XXIIIGeneral Assembly of the European Geophysical Society.Nice, France, 1998, p. 317-342.
ROTHACHER M., MERVART L. (eds) (1996): Bernese GPS Soft-ware Version 4.0. Astronomical Institute, University ofBern, 1996.