skripsi rancang-bangun sistem electric drive untuk …
TRANSCRIPT

SKRIPSI
RANCANG-BANGUN SISTEM ELECTRIC DRIVE UNTUK MESIN
KENDARAAN LISTRIK RINGAN BERBASISKAN MOTOR DC
ANDI ZAENAL AQZA MP RASYID
10582 11 140 17 10582 11 149 17
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS MUHAMMADIYAH MAKASSAR
2021



iv
ABSTRAK
Dengan kemajuan ilmu pengetahuan dan teknologi, tingkat produksi pada
mobil listrik terus mengalami peningkatan. Secara global di dunia otomotif,
penggunaan akan bahan bakar minyak yang dipakai terus meningkat yang dapat
menimbulkan dampak negatif bagi lingkungan. Pengembangan kendaraan listrik
memberikan cara terbaik untuk mengatasi masalah ini.
Penggunaan kendaraan listrik dinilai efektif selain tidak mencemari udara
dan konstruksi mesinnya lebih sederhana. Penggunaan mobil listrik tentunya
membutuhkan mesin listrik. Pada skripsi ini telah dilakukan pembuatan sistem
elektrik drive sederhana yang menggunakan motor listrik jenis motor DC dengan
magnet permanen. Motor DC lebih mudah diatur kecepatan putarannya
dibandingkan dengan motor AC, disebut sebagai motor DC magnet permanen
karena motor ini menggunakan dua atau lebih magnet permanen pada statornya.
Sedangkan bagian motor yang berputar, atau rotor, terdiri dari lilitan yang akan
terhubung pada suatu komutator mekanik melalui karbon brush.
Kata kunci : mobil listrik, motor DC magnet permanen, DC drive.

v
ABSTRAC
With the advancement of science and technology, the production rate of
electric cars continues to increase. Globally in the automotive world, the use of
fuel oil used continues to increase which can have a negative impact on the
environment. The development of electric vehicles provides the best way to solve
this problem.
The use of electric vehicles is considered effective in addition to not
polluting the air and the engine construction is simpler. The use of electric cars of
course requires an electric engine. In this thesis, a simple electric drive system has
been made using an electric motor with a DC motor type with permanent magnets.
DC motors are more easily regulated than AC motors, they are called permanent
magnet DC motors because they use two or more permanent magnets in the stator.
The rotating part of the motor, or rotor, consists of windings which are connected
to a mechanical commutator via carbon brushes.
Keywords : electric car, DC motor with permanent magnet, DC drive.

vi
KATA PENGANTAR
Assalamualaikum Wr. Wb.
Segala puji bagi Allah yang telah melimpahkan rahmat, karunia,
menciptakan manusia dengan sebaik-baik bentuk dan telah memberikan petunjuk
kepada manusia dengan firman-Nya. Betapa besar kasih sayang Allah kepada
seluruh umat manusia walaupun sering kali kita terlupa atau dengan sengaja kufur
terhadap nikmat-Nya. Salam dan shalawat semoga Allah curahkan bagi junjungan
kita, penghulu para Nabi, Muhammad Shallallhu Alaihi wa Sallam beserta segenap
keluarga dan sahabatnya serta para pengikutnya yang telah membawa kita dari alam
jahiliyah ke dinul islam seperti saat ini, sehingga penulis dapat menyelesaikan
Tugas Akhir yang berjudul “Rancang-Bangun Sistem Electric Drive Untuk
Mesin Kendaraan Listrik Ringan Berbasiskan Motor DC”. Dalam penulisan
Tugas Akhir ini tidak bisa lepas dari bantuan banyak pihak, maka dengan segala
hormat penulis ingin mengucapkan terima kasih kepada :
1. Allah SWT yang telah memberikan rahmat dan nikmatnya sehingga penulis
dapat menyelesaikan laporan kerja praktek ini tepat pada waktunya.
2. Ayah, Ibu, kakak dan adik yang kusayangi serta segenap keluarga penulis
yang telah memberikan motivasi, dukungan baik moril maupun materil dan
juga kasih sayang kepada penulis.
3. Ibu Adriani., S.T., M.T selaku ketua prodi dan Ibu Rahmania., S.T., M.T
selaku sekretaris prodi Teknik Elektro Universitas Muhammadiyah
Makassar.
4. Bapak Ir. Abd. Hafid., M.T selaku Pembimbing 1 dan dan Bapak Andi
Faharuddin., S.T.,M.T Pembimbing 2 tugas akhir yang telah banyak
memberikan masukan dan arahan dalam penulisan Tugas Akhir ini.
5. Seluruh karyawan dan staf tata usaha yang telah membantu dan memberikan
bimbingan kepada penulis dalam menyelesaikan proses administrasi Tugas
Akhir.

vii
6. Seluruh Dosen Teknik Elektro Universitas Muhammadiyah Makassar yang
telah memberikan dukungan dan ilmunya kepada penulis.
7. Seluruh teman-teman KKP yang telah memberikan motivasi dan
dukungannya.
8. Seluruh teman-teman AKURASI angkatan 2017 yang telah membantu
penulis dalam menyelesaikan kuliah di Jurusan Teknik Elektro Universitas
Muhammadiyah Makassar.
9. Rekan-rekan Lab. Elektro Universitas Muhammadiyah Makassar atas
pengertian, kerja sama dan toleransinya kepada penulis selama pengerjaan
Tugas Akhir ini.
10. Teman-teman seperjuangan BACOT yang telah memberikan saran dan
motivasi kepada penulis dalam menyelesaikan Tugas Akhir ini..
11. Semua pihak yang tentunya tidak dapat penulis sebutkan satu persatu yang
telah banyak membantu penulis dalam menyelesaikan Tugas Akhir ini.
Akhirnya tiada yang sempurna kecuali Allah, semoga buah karya dan
laporan ini dengan segala kekurangannya bisa mengisi khazanah
kepustakaan kita dan sebagai referensi.
Tugas Akhir yang akan datang. Penulis berharap laporan ini bermanfaat
untuk semua pihak. Kritik dan saran yang membangun sangat penulis harapkan
untuk perbaikan di kemudian hari. Terima kasih.
Wassalamu’alaikum Wr. Wb.
Makassar, 10 September 2021
Penulis

viii
DAFTAR ISI
HALAMAN PENGASAHAN ........................................................................... ii
PENGESAHAN ................................................................................................ iii
ABSTRAK ........................................................................................................ iv
KATA PENGANTAR ...................................................................................... vi
DAFTAR ISI ................................................................................................... viii
DAFTAR GAMBAR ....................................................................................... xii
DAFTAR TABEL........................................................................................... xiii
DAFTAR GRAFIK ........................................................................................ xiv
DAFTAR LAMPIRAN ................................................................................... xv
BAB I PENDAHULUAN
A. Latar Belakang ........................................................................................ 1
B. Rumusan Masalah ................................................................................... 2
C. Tujuan Penelitian .................................................................................... 2
D. Batasan Masalah...................................................................................... 2
E. Manfaat Penelitian .................................................................................. 3
F. Sistematika Penulisan.............................................................................. 4
BAB II DASAR TEORI
A. Terminologi Dasar ................................................................................... 5
1. Gaya .................................................................................................... 5
2. Torsi .................................................................................................... 5
3. Kecepatan ............................................................................................ 7
4. Kecepatan Pada Objek Berputar.......................................................... 7

ix
5. Percepatan ........................................................................................... 8
B. Motor Listrik ........................................................................................... 9
1. Konsep Dasar Motor Listrik .............................................................. 10
2. Jenis-Jenis Motor Listrik ................................................................... 11
a. Motor AC .................................................................................. 12
b. Prinsip Kerja Motor AC ............................................................ 13
3. Motor DC .......................................................................................... 14
a. Prinsip Kerja Motor DC ............................................................ 15
b. Komponen Utama Motor DC .................................................... 16
c. Jenis-jenis Motor DC ................................................................ 18
C. Baterai ................................................................................................... 22
1. Konstruksi Baterai ............................................................................. 22
2. Cara Kerja Accu ................................................................................ 27
a. Saat Baterai Aki Menerima Arus .............................................. 28
b. Saat Baterai Menerima Arus ..................................................... 28
3. Kapasitas Baterai ............................................................................... 29
a. Faktor Yang Mempengaruhi Kapasitas Aki .............................. 30
D. Device Kontrol Motor ........................................................................... 31
1. Relai ............................................................................................... 31
a. Prinsip Kerja Relai....................................................................... 33
b. Jenis-Jenis dan Simbol Relai ....................................................... 33
1) Jenis Relai Berdasarkan Cara Kerja .................................... 33
2) Jenis Relai Berdasarkan Jumlah Pole dan Throw ............... 34

x
c. Konstruksi Relai .......................................................................... 36
2. Kontaktor ......................................................................................... 37
E. Potensiometer ........................................................................................ 39
BAB III METODE PENELITIAN
A. Waktu dan Tempat Penelitian ............................................................... 41
B. Peralatan dan Bahan .............................................................................. 41
1. Pelaratan .......................................................................................... 41
2. Bahan............................................................................................... 42
C. Diagram Blok Sistem ............................................................................ 43
D. Langkah Penelitian ................................................................................ 45
E. Jadwal Penelitian ................................................................................... 47
BAB IV HASIL DAN PEMBAHASAN
A. Perancangan Sistem Elektrik................................................................. 49
1. Wiring Diagram ................................................................................ 49
a. Sistem Relai Pengunci .................................................................. 50
b. Speed Controller ........................................................................... 50
c. Sistem Kendali Arah Putaran ........................................................ 51
B. Pengukuran Alat .................................................................................... 51
1. Pengukuran Pada Output Baterai ...................................................... 51
a. Hasil Pengukuran Tegangan Output Baterai pada Putaran
Maju .................................................................................................. 52
b. Hasil Pengukuran Tegangan Output Baterai pada Putaran
Mundur ............................................................................................. 53

xi
2. Pengukurana Tegangan Sistem Pengendali Arah ............................. 53
3. Pengukuran Pada Input Motor .......................................................... 55
a. Hasil Pengukuran Input Motor Pada Putaran Maju ...................... 55
b. Hasil Pengukuran Input Motor Pada Putaran Mundur ................. 56
4. Pengukuran Kecepatan Pada Putaran Motor ..................................... 57
a. Hasil Pengukuran Pada Putaran Maju .......................................... 57
b. Hasil Pengukuran Pada Putaran Mundur ...................................... 58
BAB V PENUTUP
A. Kesimpulan ...................................................................................... 59
B. Saran ................................................................................................ 60
DAFTAR PUSTAKA ...................................................................................... 61
LAMPIRAN ..................................................................................................... 63

ix
DAFTAR GAMBAR
Gambar 2.1 Torsi pada porosnya ............................................................................. 5
Gambar 2.2 Ilustrasi kecepatan suatu objek ............................................................. 7
Gambar 2.3 Ilustrasi kecepatan suatu objek ............................................................. 7
Gambar 2.4 Ilustrasi percepatan suatu objek ........................................................... 8
Gambar 2.5 Ilustrasi percepatan dan perlambatan suatu objek ................................ 8
Gambar 2.6 Sifat alami magnet .............................................................................. 11
Gambar 2.7 Visualisasi garis-garis antara kutub berbeda ...................................... 11
Gambar 2.8 Bagan jenis-jenis motor listrik ........................................................... 12
Gambar 2.9 Kutub medan magnet ......................................................................... 16
Gambar 2.10 Stator ................................................................................................ 16
Gambar 2.11 Jangkar/rotor..................................................................................... 17
Gambar 2.12 Komutator......................................................................................... 17
Gambar 2.13 Brush ................................................................................................ 18
Gambar 2.14 Motor DC magnet permanen ............................................................ 20
Gambar 2.15 Bagian-bagian baterai ....................................................................... 22
Gambar 2.16 Kotak dan penutup baterai................................................................ 23
Gambar 2.17 Pelat positive dan negative dalam satu sel ....................................... 24
Gambar 2.18 Penyekat atau separator diatara pelat baterai ................................... 25
Gambar 2.19 Sel baterai ......................................................................................... 25
Gambar 2.20 Terminal baterai ............................................................................... 26
Gambar 2.21 Tutup ventilasi .................................................................................. 27
Gambar 2.22 (a) Bentuk relai, (b) Simbol relai ..................................................... 31

x
Gambar 2.23 Tampilan relai jenis SPST ................................................................ 35
Gambar 2.24 Tampilan relai jenis SPDT ............................................................... 35
Gambar 2.25 Tampilan relai jenis DPST ............................................................... 35
Gambar 2.26 Tampilan relai jenis DPDT .............................................................. 36
Gambar 2.27 Konstruksi relai elektro mekanik posisi NC (normally close) ......... 36
Gambar 2.28 Konstruksi relai elektro mekanik posisi NO (normally open) ......... 37
Gambar 2.29 Kontaktor .......................................................................................... 38
Gambar 2.30 Pedal/potensiometer ......................................................................... 39
Gambar 3.1 Diagram balok skema penelitian ........................................................ 43
Gambar 3.2 Flow chart proses penelitian .............................................................. 45
Gambar 4.1 Wiring diagram .................................................................................. 50

xiii
DAFTAR TABEL
Tabel 2.1 Kelebihan dan kelemahan PM ..................................................... 21
Tabel 3.1 Alat penelitian .............................................................................. 41
Tabel 3.2 Bahan penelitian ........................................................................... 42
Tabel 3.3 Jadwal penelitian .......................................................................... 47
Tabel 4.1 Hasil pengukuran sistem pengendali arah .................................... 54

xiv
DAFTAR GRAFIK
Grafik 2.1 Sumber daya AC satu fasa .................................................................... 13
Grafik 2.2 Sumber daya AC tiga fasa .................................................................... 13
Grafik 4.1 pengukuran tegangan output baterai pada putaran maju ...................... 52
Grafik 4.2 pengukuran tegangan output baterai pada putaran mundur .................. 53
Grafik 4.3 pengukuran tegangan input motor pada putaran maju .......................... 55
Grafik 4.4 pengukuran tegangan input motor pada putaran mundur .................... 56
Grafik 4.5 pengukuran kecepatan putaran motor pada putaran maju .................... 57
Grafik 4.6 pengukuran kecepatan putaran motor pada putaran mundur ................ 58

xv
DAFTAR LAMPIRAN
Lampiran 1 Rangkaian alat sistem electric drive .......................................... 63
Lampiran 2 Pengukuran tegangan sumber baterai ....................................... 63
Lampiran 3 Pengukuran kelayakan relai ....................................................... 64
Lampiran 4 Pengukuran tegangan input motor ............................................ 64
Lampiran 5 Pengukuran kecepatan motor..................................................... 65
Lampiran 6 Data pengukuran kelayakan relai ............................................. 65
Lampiran 7 Data pengukuran tegangan sumber, sistem pengendali arah,
Tegangan input motor, dan RPM motor .................................... 67
Lampiran 8 Data pengukuran resistansi potensiometer ................................ 68
Lampiran 9 Spesifikasi motor DC................................................................. 69

1
BAB I
PENDAHULUAN
A. Latar Belakang
Seiring perkembangan ilmu pengetahuan dan teknologi, tingkat
produksi pada mobil listrik terus meningkat sejak awal diciptakan. Secara
global, mobil listrik mengalami kenaikan pesat dalam 1 dekade terakhir,
walaupun saat ini Indonesia masih berada pada tahap awal pengembangan
kendaraan listrik.
Di Indonesia hampir seluruh kendaraan masih menggunakan bahan
bakar minyak sebagai bahan bakar utama, Bukan hanya tentang ramah lingkungan
atau tidaknya, ternyata ukuran dan berat mobil sangat berpengaruh. Mobil yang
berukuran besar tentunya membutuhkan tenaga yang lebih banyak, dan semakin
banyak tenaga yang digunakan maka semakin banyak polusi yang ditimbulkan,
maka sebaiknya industri otomotif mulai mengembangkan mobil listrik ringan
dengan satu penumpang.
Mobil listrik memiliki banyak kelebihan dari pada mobil bahan bakar
fosil, diantaranya efisiensi bahan bakar yang lebih hemat, tidak menimbulkan
polusi udara, suaranya halus, tahan lama, dan konstruksi mesinnya yang lebih
sederhana. Mobil listrik memiliki beberapa komponen pendukung yaitu salah
satunya motor listrik, di mana motor listrik ini merupakan komponen
utamanya. Ada beberapa jenis motor listrik yang digunakan dan memiliki
keuntungan masing-masing.

2
Tugas akhir ini akan diarahkan ke desain, realisasi serta pengujian suatu
sistem Electrick Drive (ED) khususnya bagian pengendalian arah gerak
kendaraan ringan, yang menggunakan motor DC.
B. Rumusan Masalah
1. Bagaimana desain/rancangan & bangunan sistem electric drive (ED)
kendaraan listrik ringan?
2. Bagaimana kinerja dari sistem electric drive (ED) yang telah dibangun?
C. Tujuan Penelitian
Penelitian ini diarahkan untuk:
1. Mendapatkan desain & bangunan sistem electric drive (ED).
2. Mendapatkan kinerja dari sistem ED.
D. Batasan Masalah
Adapun batasan-batasan dalam tugas akhir ini berfokus pada
perancangan, realisasi dan pengujian kinerja dari suatu bagian sistem
electric drive mesin kendaraan, yakni sistem kendali gerakan maju &
mundur dari mobil listrik

3
E. Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini antara lain :
1. Dapat berfungsi sebagai purwarupa sistem pengendalian arah gerakan
(maju, netral dan mundur) untuk kendaraan listrik ringan.
2. Sarana pengaplikasian pengetahuan teoritis dan praktik, tentang sistem
electric drive pada mesin kendaraan ringan bagi peneliti.
F. Sistematika Penulisan
Bab Pertama, Bab ini menjelaskan tentang latar belakang, rumusan masalah,
batasan masalah, serta tujuan dan manfaat dari penelitian yang dilakukan serta
sistematika penulisan dari laporan hasil penelitian.
Bab Kedua, bab ini menjelaskan teori-teori pendukung yang berkaitan dengan
judul penelitian.
Bab Ketiga, bab ini menjelaskan tentang waktu dan tempat penelitian, alat dan
bahan yang digunakan, diagram balok dan gambar rangkaian penelitian, serta
metode penelitian yang berisi langkah-langkah dalam proses melakukan
penelitian.
Bab Keempat, bab ini menjelaskan hasil penelitian, alat dan perhitungan serta
pembahasan mengenai judul penelitian.
Bab Kelima, bab ini merupakan penutup yang berisi kesimpulan dan saran
mengenai judul penelitian.
Daftar Pustaka, berisi daftar sumber referensi bagi penulis dalam memilih
teori yang relevan dengan judul penelitian..
4
Lampiran, berisi dokumentasi hasil penelitian serta alat dan bahan yang
digunakan dalam penelitian.

5
BAB II
DASAR TEORI
A. Terminologi Dasar
1. Gaya
Menurut Kristianto (2020) menjelaskan bahwa jika kita mendorong atau
menarik sebuah benda, maka dapat dikatakan bahwa kita melakukan gaya pada
benda tersebut. Newton mendefinisikan gaya dengan, “Segala sesuatu yang dapat
mempercepat atau memperlambat gerak suatu benda”. Semakin besar gaya yang
bekerja pada suatu benda semakin besar pula percepatan atau perlambatan yang
dihasilkan.
2. Torsi
Menurut Zumain (2009) bahwa torsi adalah gaya puntir yang menyebabkan
suatu objek berputar. Contohnya suatu gaya yang diterapkan terhadap ujung
pengungkit menyebabkan efek puntir atau torsi pada titik porosnya.
Gambar 2.1 Torsi pada porosnya
Torsi (T) dihasilkan dari perkalian hasil gaya dan jari-jari (panjang lengan
pengungkit) dan diberi satuan Nm.
𝑇 = 𝐹. 𝑟

6
Di mana
T = Torsi (Nm)
F = Gaya (N)
r = Jari-jari (m)
Gaya untuk motor listrik dapat dihitung dengan rumus:
𝐹 = 𝐵. 𝐼. 𝑙
Di mana
B = kuat medan magnet (Wb / m2)
I = arus yang mengalir di lilitan motor (A)
l = panjang kawat lilitan (m)
Berdasarkan aturan tangan kiri Fleming’s maka rumus diatas dapat
dikembangkan lebih lanjut untuk menghitung torsi motor dengan sejumlah lilitan
armature sebagai berikut.
T = B. I. l. r. Z
Di mana
T = torsi (Nm)
r = Jari-jari armature (m)
Z = jumlah lilitan armature yang aktif
Menurut Zumain (dalam Kuswardana, 2016) bahwa dari persamaan diatas
terlihat penambahan nilai gaya atau jari-jari, akan meningkatkan torsi. Contoh, jika
gaya 10 N pada pengungkit dengan panjang 1 m, maka torsinya sebesar 10 Nm.
Penambahan besar gaya menjadi 20 N, atau panjang pengungkitnya 2 m, akan
meningkatkan torsi sebesar 20 Nm.
7
3. Kecepatan
Menurut pendapat Zumain (2009) Suatu objek yang bergerak akan
menempuh jarak tertentu dalam waktu yang ditentukan. Kecepatan adalah
perbandingan jarak yang ditempuh dan waktu yang dibutuhkan untuk melakukan
perjalanan. Misalnya, sebuah mobil menempuh jarak 60 km dalam satu jam.
Gambar 2.2 Ilustrasi kecepatan suatu objek
4. Kecepatan Pada Objek Berputar
Menurut Zumain (2009), bahwa kecepatan juga diterapkan pada objek
berputar seperti ban mobil atau as motor. Dalam hal ini dikenal sebagai kecepatan
putar. Kecepatan benda berputar adalah ukuran berapa lama sebuah titik pada benda
berputar untuk menyelesaikan satu putaran penuh. Kecepatan putar suatu benda
umumnya dinyatakan dalam putaran per menit (RPM). Suatu benda yang
menghasilkan sepuluh putaran penuh dalam satu menit memiliki kecepatan 10
RPM.
Gambar 2.3 Ilustrasi kecepatan suatu objek

8
5. Percepatan
Menurut Kuswardana (2016) Suatu objek dapat berubah kecepatannya,
perubahan kecepatan ini disebut dengan percepatan. Percepatan terjadi ketika ada
perubahan pada gaya total (gaya bersih) yang bekerja pada objek, yang
menyebabkan perubahan kecepatan. Sebuah mobil menambah kecepatan dari 30
km/jam menjadi 60 km/jam, berarti telah ada perubahan kecepatan sebesar 30
km/jam. Percepatan dapat juga berubah dari kecepatan tinggi ke kecepatan yang
lebih rendah. Hal ini disebut dengan perlambatan (deceleration/negative
acceleration).
Gambar 2.4 Ilustrasi percepatan suatu objek
Percepatan dan perlambatan juga dapat diterapkan untuk objek yang
berputar. Sebagai contoh, suatu objek yang berputar dapat dipercepat dari 10
RPM menjadi 20 RPM, atau diperlambat dari 20 RPM menjadi 10 RPM.
Gambar 2.5 Ilustrasi percepatan dan perlambatan suatu objek

9
B. Motor Listrik
Menurut Saleh dan Bahariawan (2018) menyatakan bahwa motor listrik
adalah sebuah mesin yang menggunakan energi listrik untuk menghasilkan energi
mekanik, melalui interaksi antara medan magnetik dengan konduktor-konduktor
pembawa arus. Proses sebaliknya, generator atau dinamo mengkonversi energi
mekanik menjadi energi listrik. Motor traksi yang digunakan pada kendaraan-
kendaraan dapat berfungsi sebagai motor ataupun sebagai generator. Motor listrik
dapat ditemukan dalam berbagai fungsi di industri ataupun di rumah tangga seperti
kipas angin, blower dan pompa, mesin perkakas, alat-alat rumah tangga, dan disc
drive.
Motor listrik tersebut dapat digerakkan oleh energi listrik arus searah,
sebagai contoh motor yang menggunakan tenaga baterai atau oleh arus bolak-balik
dari pusat jaringan distribusi tenaga listrik. Motor yang paling kecil dapat
ditemukan di dalam sebuah arloji.
Motor listrik ukuran sedang lebih banyak ditemukan dalam sebuah industri
dengan dimensi dan karakteristik yang memiliki standardisasi yang lebih tinggi,
motor-motor tersebut disesuaikan dengan fungsi dan intensitas penggunaannya oleh
industri yang bersangkutan.
Motor listrik paling besar digunakan untuk menggerakkan kapal-kapal besar
(kapal laut) sebagai sarana transportasi laut, dan dengan tujuan sama juga motor
listrik terdapat pada sebuah kompresor yang fungsinya untuk menghisap dan
menekan cairan, dengan rating daya yang sampai jutaan watt.

10
Konversi energi listrik kedalam enegi mekanik berdasarkan prinsip kerja
medan elektromagnetik yang pertama kali diperkenalkan oleh seorang ilmuan asal
inggris, Michael Faraday, pada tahun 1821.
Percobaan yang dilakukan Faraday yaitu sepotong kawat menggantung
(free-hanging wire) dicelupkan kedalam sebuah wadah mercury di mana pada
wadah mercury tersebut diletakkan pula sebuah magnet permanen.
Ketika kawat dialiri arus listrik, kawat tersebut berputar disekitar magnet,
hal ini menunjukkan bahwa arus listrik menimbulkan medan magnet putar disekitar
kawat.
1. Konsep Dasar Motor Listrik
Menurut Yudha (2020) bahwa pada bagian ini akan dijelaskan bagaimana
cara kerja motor listrik. Tujuannya adalah untuk memberikan informasi awal
sebelum melanjutkan pokok bahasan utama. Akan dipelihatkan pula konsep
magnetism, AC (alternating current), elektromagnetik, konstruksi motor, dan torsi.
a. Magnetism
Semua magnet memiliki dua karakteristik, yaitu: menarik logam seperti besi
dan baja. Dan akan bergerak untuk menunjukkan utara-selatan jika tidak ada yang
menghalangi. Fungsi lain yang sangat penting dari magnet adalah memiliki dua
kutub, kutub utara dan kutub selatan. Kutub senama akan saling menjauh,
sedangkan kutub berbeda saling mendekat satu sama lain, perhatikan gambar
berikut:

11
Gambar 2.6 Sifat alami magnet
b. Garis Magnetik Fluks
Kita dapat menvisualisasikan medan magnet, di mana gaya magnet yang
tidak terlihat dapat membuat magnet berlaku sebagaimana yang dikatakan, seperti
garis-garis fluks bergerak dari kutub utara ke kutub selatan (perhatikan Gambar
2.7). Dalam beberapa kasus, kutub utara dan selatan tidak mudah diidentifikasi
seperti pada batang magnet klasik atau magnet tapal kuda. Ini tentu saja kasus
dengan elektromagnetik.
Gambar 2.7 Visualisasi garis-garis antara kutub berbeda
2. Jenis-jenis Motor Listrik
Menurut Saleh dan bahariawan (2018) bahwa tipe atau jenis motor listrik
yang ada saat ini beraneka ragam jenis dan tipenya. Semua jenis motor listrik yang
ada memiliki dua bagian utama yaitu stator dan rotor. Stator adalah bagian motor
listrik yang diam dan rotor adalah bagian motor yang bergerak (berputar). Pada
dasarnya motor listrik dibedakan dari jenis sumber tegangan kerja yang digunakan.
Berdasarkan sumber tegangan kerjanya motor listrik dapat dibedakan 2 jenis yaitu:

12
a. Motor listrik arus bolak-balik AC (Alternating Current)
b. Motor listrik arus searah DC (Direct Current)
Dari 2 jenis motor listrik diatas terdapat beberapa jenis-jenis motor listrik
berdasarkan prinsip kerja, konstruksi, operasinya dan karakternya.
Gambar dibawah ini memperlihatkan motor listrik yang paling umum.
Motor tersebut dikategorikan berdasarkan pasokan input, konstruksinya dan
mekanisme operasi, dan dijelaskan lebih lanjut dibawah ini.
Gambar 2.8 Bagan jenis-jenis motor listrik
a. Motor AC
Menurut Saleh dan Bahariawan (2018) bahwa motor listrik arus bolak-balik
adalah jenis motor listrik yang beroperasi dengan sumber tegangan arus listrik bolak
balik (AC, Alternating Current). Sumber daya arus bolak-balik (AC) dimaksudkan
untuk menyuplai kebutuhan listrik dalam berbagai industri perdagangan atau
pelanggan tetap. Menurut Nur dan Suyuti (2018) menyatakan bahwa sumber daya
Magnet
Permanen

13
AC dikelompokkan dalam satu fasa dan tiga fasa. Sebagaian besar instalasi
komersial ringan hanya menggunakan sumber daya satu fasa yang disalurkan
melalui dua kawat konduktor dan satu kawat tanah dengan bentuk gelombang daya
yang terjadi seperti yang terlihat dalam gambar dibawah ini. Sedangkan daya tiga
fasa disuplay ke sistem tiga kawat dan tersusun dari tiga gelombang berbeda dengan
amplitudo yang sama dengan beda tiap fasa 1200.
Grafik 2.1 Sumber daya AC satu fasa
Grafik 2.2 Sumber daya AC tiga fasa
b. Prinsip kerja Motor AC
Menurut Saleh dan Bahariawan (2018) bahwa pada motor listrik tenaga
listrik diubah menjadi tenaga mekanik. Perubahan ini dilakukan dengan mengubah
tenaga listrik menjadi magnet yang disebut sebagai elektro magnet. Sebagaimana

14
diketahui bahwa kutub-kutub dari magnet yang senama akan tolak menolak dan
kutub-kutub tidak senama akan tarik menarik. Maka kita akan dapat memperoleh
gerakan jika kita menempatkan sebuah magnet pada sebuah poros yang dapat
berputar, dan magnet yang lain pada suatu kedudukan yang tetap.
3. Motor DC
Menurut Saleh dan Bahariawan (2018) bahwa motor DC atau sering juga
disebut motor arus searah, sebagaimana namanya menggunakan arus langsung yang
tidak langsung/direct-unidirectional yang lebih sering digunakan untuk keperluan
pengaturan kecepatan dibandingkan dengan motor AC. Bentuk motor yang paling
sederhana memiliki kumparan tunggal yang dapat berputar bebas di antara kutub-
kutub magnet permanen. Motor DC merupakan jenis motor yang menggunakan
tegangan searah sebagai sumber tenaganya.
Menurut Sukmawidjaja (2014) menyatakan bahwa jika arus melewati
konduktor, maka akan timbul medan magnet dan garis-garis medan magnet (fluks)
dihasilkan oleh kutub-kutub magnet pada stator. Interaksi antara kedua medan
tersebut akan menimbulkan perpotongan medan magnet sehingga menimbulkan
gaya, gaya tersebut menghasilkan torsi yang akan memutar rotor.
Menurut Aditya, dkk (2019) menyatakan bahwa motor DC terdapat jangkar
dengan satu atau lebih dengan kumparan terpisah. Tiap kumparan berujung pada
cincin belah (komulator). Dengan adanya insulator antara komulator cincin belah
dapat berperan sebagai saklar kutup ganda (double pole, double throwswith).

15
Dalam perkembangannya banyak sekali cara pengaturan motor DC,
diantaranya pengaturan motor DC menggunakan sebuah drive, kegunaan drive
tersebut untuk memudahkan operator dalam menggunakan motor DC agar bekerja
sesuai yang diinginkan.
a. Prinsip Kerja Motor DC
Menurut pendapat Zumain (2009) menyatakan bahwa berdasarkan pada
prinsip kemagnetan, maka motor DC menggunakan prinsip kemagnetan diatas.
Penghantar yang mengalirkan arus ditempatkan tegak lurus pada medan magnet,
cenderung bergerak tegak lurus terhadap medan. Besarnya gaya yang didesakkan
untuk menggerakkan berubah sebanding dengan kekuatan medan magnet, besarnya
arus yang mengalir pada penghantar, dan panjang penghantar. Untuk menentukan
arah gerakan penghantar yang mengalirkan arus pada medan magnet, digunakan
hukum tangan kanan motor. Ibu jari dan dua jari yang pertama dari tangan kanan
disusun sehingga saling tegak lurus satu sama lain dengan menunjukkan arah garis
gaya magnet dari medan, dan jari tengah menunjukkan arah arus yang mengalir
(minus ke plus) pada penghantar. Ibu jari akan menunjukkan arah gerakan
penghantar. Gambar terebut menggambarkan bagaimana torsi motor dihasilkan
oleh kumparan yang membawa arus atau loop pada kawat yang ditempatkan pada
medan magnet. Interaksi pada medan magnet menyebabkan pembengkokan garis
gaya. Apabila garis cenderung lurus keluar, pembengkokan tersebut menyebabkan
loop mengalami gerak putaran. Penghantar sebelah kiri ditekan ke bawah dan

16
penghantar sebelah kanan ditekan ke atas, menyebabkan putaran jangkar
berlawanan dengan arah putaran jarum jam.
Gambar 2.9 Kutub medan magnet
b. Komponen Utama Motor DC
Menurut Yuski, dkk (2017) komponen utama motor DC yaitu :
1) Stator Motor DC
Gambar 2.10 Stator
Stator adalah bagian yang berfungsi sebagai rangkaian magnetik yang
mempunyai sepasang kutub medan yang terpasang pada bagian dalam stator.

17
2) Jangkar atau rotor motor DC
Gambar 2.11 Jangkar/rotor
Jangkar berfungsi untuk merubah energi listrik menjadi energi gerak dalam
bentuk gerak putar. Jangkar terdiri dari poros baja di mana tumpukan keping-keping
inti yang berbentuk silinder dijepit. Pada inti jangkar terdapat alur-alur dimana
lilitan jangkar diletakkan.
3) Komutator
Gambar 2.12 Komutator
Konstruksi dari komutator terdiri dari batangan tembaga yang dikeraskan
(drop forged) yang diisolasi dengan sejenis mika. Fungsi komutator ini adalah
mengumpulkan arus induksi dari konduktor jangkar dan mengkonversikan menjadi
arus searah melalui sikat. Secara mekanik motor DC merupakan alat yang komplek

18
dan cenderung banyak persoalan. Sebagai contoh, kotoran pada komutator, dapat
menghambat suplai listrik menuju jangkar. Beberapa jenis perawatan dibutuhkan
pada saat menggunakan motor DC, pada beberapa pemakaian dengan lingkungan
tertentu. Misalnya pada lingkungan asam, akan memunculkan karat yang dapat
membahayakan.
4) Sikat (Brush)
Gambar 2.13 Brush
Sikat digambarkan pada gambar (2.13) terbuat dari karbon, graphite, logam
graphite atau campuran karbon dan grafit yang dilengkapi dengan pegas penekanan
dan konak sikatnya. Sikat biasanya dipasang dengan menumpangkannya pada sisi
komutator untuk menyuplai listrik ke motor.
c. Jenis- jenis Motor DC
Menurut Saleh dan Bahariawan (2018) bahwa motor listrik arus searah DC
dapat dibedakan lagi berdasarkan sumber dayanya sebagai berikut:
1) Motor DC sumber daya terpisah/separately excited, adalah jenis motor DC yang
memiliki sumber arus medan disuplai dari sumber terpisah, sehingga motor ini
disebut motor DC sumber daya terpisah (separately excited).
19
2) Motor DC sumber daya sendiri/self excited, adalah jenis motor DC yang sumber
arus medannya disuplai dari sumber yang sama dengan kumparan motor listrik
sehingga motor listrik DC disebut motor DC sumber daya sendiri (self excited).
3) Motor DC sumber daya sendiri/self excited dapat dibedakan lagi menjadi 3 jenis
berdasarkan konfigurasi suplai medan dengan kumparan motornya sebagai
berikut:
a) Motor DC Shunt, pada motor DC shunt, gulungan medan disambungkan secara
paralel dengan gulungan motor listrik. Oleh karena itu arus dalam jalur
merupakan penjumlahan arus medan dan arus dinamo.
b) Motor DC seri, pada motor DC seri, gulungan medan yang dihubungkan secara
seri dengan gulungan kumparan motor (A). oleh sebab itu arus medan sama
dengan arus dinamo.
c) Motor DC kompon, motor kompon DC merupakan gabungan antara motor seri
dan shunt. Pada motor kompon, gulungan medan dihubungkan secara seri dan
parallel dengan gulungan motor listrik. Sehingga motor kompon memiliki
torque penyalaan awal yang bagus dan kecepatan yang stabil.
d) Motor DC magnet permanen
Menurut Yudha (2020) menjelaskan bahwa motor DC memerlukan suplai
tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik.
Disebut dengan motor DC magnet permanen karena terdapat dua buah magnet
permanen pada bagian statornya atau bagian motor yang tidak berputar, serta
terdapat lilitan yang terhubung dengan komutator mekanik melalui karbon brush
pada rotornya atau bagian motor yang berputar. Menurut Hartono, dkk (2016)

20
menyatakan bahwa motor DC magnet permanen dapat mengubah polaritas positif
dan negatif pada tegangan sumber DCnya, maka dapat dengan mudah mengatur
menggerakkan motor untuk dua arah putaran (reversible).
Gambar 2.14 Motor DC magnet permanen
Karakteristik utama PMDC antara lain :
(1) Kurva torsi kecepatan garis lurus
(2) Beroperasi kecepatan sedang 1.000-5.000 rpm
(3) Efisiensi 60% - 70% (kecil kebesar)
(4) Torsi pengasutan tinggi (8-10 kali torsi nominal)
(5) Pengoperasian pada tegangan DC
(6) Usia pakai 2.000 jam lebih
(7) Tipikal konstruksi yang benar-benar tertutup.
Salah satu keunggulan motor PM adalah kecepatan operasi yang lebih
rendah, membuatnya ideal untuk digunakan dengan peredam roda gigi dan
memungkinkan untuk operasi yang jauh lebih tenang.
21
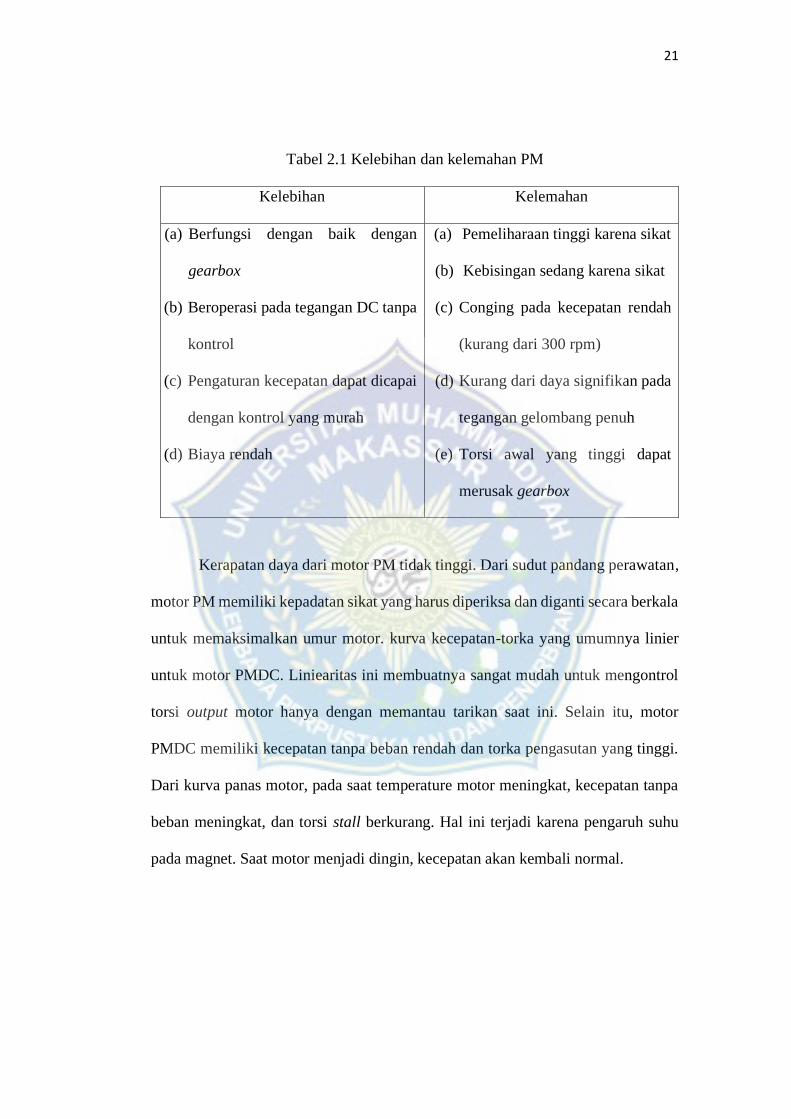
Tabel 2.1 Kelebihan dan kelemahan PM
Kelebihan Kelemahan
(a) Berfungsi dengan baik dengan
gearbox
(b) Beroperasi pada tegangan DC tanpa
kontrol
(c) Pengaturan kecepatan dapat dicapai
dengan kontrol yang murah
(d) Biaya rendah
(a) Pemeliharaan tinggi karena sikat
(b) Kebisingan sedang karena sikat
(c) Conging pada kecepatan rendah
(kurang dari 300 rpm)
(d) Kurang dari daya signifikan pada
tegangan gelombang penuh
(e) Torsi awal yang tinggi dapat
merusak gearbox
Kerapatan daya dari motor PM tidak tinggi. Dari sudut pandang perawatan,
motor PM memiliki kepadatan sikat yang harus diperiksa dan diganti secara berkala
untuk memaksimalkan umur motor. kurva kecepatan-torka yang umumnya linier
untuk motor PMDC. Liniearitas ini membuatnya sangat mudah untuk mengontrol
torsi output motor hanya dengan memantau tarikan saat ini. Selain itu, motor
PMDC memiliki kecepatan tanpa beban rendah dan torka pengasutan yang tinggi.
Dari kurva panas motor, pada saat temperature motor meningkat, kecepatan tanpa
beban meningkat, dan torsi stall berkurang. Hal ini terjadi karena pengaruh suhu
pada magnet. Saat motor menjadi dingin, kecepatan akan kembali normal.

22
C. Baterai
Menurut Daryanto (2003) bahwa baterai merupakan bagian yang cukup
vital pada kendaraan listrik dalam hal menyimpan energi listrik untuk dapat
digunakan sebagai daya penggerak motor dan kontrolnya. Baterai adalah suatu alat
yang menyimpan tenaga listrik dalam bentuk tenaga kimia di mana akan
mengeluarkan tenaga listrik bila diperlukan. Baterai terdiri diri beberapa sel di
mana sel-sel tersebut membangkitkan tenaga listrik, tiap sel terdiri dari beberapa
pelat/lempeng, pemisah dan elektrolit. Kotak baterai terbuat dari ebonit atau damar
sintetis yang bertugas untuk memegangi memegangi sel dan penampang elektrolit,
reaksi kimia terjadi dalam kotak baterai, sel-sel tersebut dihubungkan secara seri
dengan demikian tenaga listrik yang terbangkit sama dengan jumlah tengangan
listrik yang terbangkit sama dengan jumlah tegangan listrik tiap-tiap selnya.
Umumnya pada mobil memakai baterai yang mempunyai tegangan 12 Volt.
1. Konstruksi baterai
Menurut Gilang (2019) bahwa kontruksi baterai digambarkan dengan
ilustrasi pada gambar bagian-bagian baterai. Berikut adalah penjelasan dari tiap-
tiap bagian baterai.
Gambar 2.15 Bagian-bagian baterai

23
a. Kotak Baterai
kotak baterai berfungsi sebagai pelindung dan penampung untuk semua
komponen baterai yang ada di dalamnya, dan memberikan ruang untuk endapan-
endapan baterai pada bagian bawah. Bahan pembuatan kotak baterai ini biasanya
transparan untuk mempermudah pengecekan ketinggian larutan elektrolit pada
baterai.
Gambar 2.16 Kotak dan penutup baterai
b. Tutup baterai
Bagian ini secara permanen menutup bagian atas baterai (Gambar 2.16),
tempat dudukan terminal-terminal baterai, lubang ventilasi, dan untuk perawatan
baterai seperti pengecekan larutan elektrolit atau penambahan air.
c. Pelat Baterai
Pelat positif dan pelat negatif memiliki grid yang terbuat dari antimoni dan
paduan timah. Pelat positif terbuat dari bahan antimoni yang dilapisi dengan lapisan
aktif oksida timah (lead dioxide, PbO2) yang berwarna coklat dan pelat negatif
terbuat dari sponge lead (Pb) yang berwarna abu-abu. Jumlah dan ukuran pelat
mempengaruhi kemampuan baterai mengalirkan arus. Baterai yang mempunyai

24
pelat yang besar atau banyak dapat menghasilkan arus yang lebih besar disbanding
baterai dengan ukuran pelat yang kecil atau jumlahnya lebih sedikit.
Gambar 2.17 Pelat positif dan negatif dalam satu sel
d. Separator atau penyeka
Penyekat yang berpori ini ditempatkan diantara pelat positif dan plat negatif.
Pori-pori yang terdapat pada penyekat tersebut memungkinkan larutan elektrolit
melewatinya. Bagian ini juga berfungsi mencegah hubungan singkat antar pelat.
Separator disisipkan antara pelat positif dan negatif untuk mencegah agar
tidak terjadi hubungan singkat antara kedua pelat tersebut. Apabila pelat mengalami
hubungan singkat karena kerusakan separator, maka energi yang dihasilkan akan
bocor. Bahan yang dipakai untuk separator adalah resi fiber yang diperkuat, karet
atau plastik. Permukaan separator yang berpori menghadap ke pelat positif untuk
melindungi karat dari pelat positif agar tidak berhamburan. Persyaratan yang harus
dipenuhi oleh separator adalah bukan konduktor, harus cukup kuat, tidak mudah
berkarat oleh elektrolit dan tidak menimbulkan bahaya terhadap elektroda.
25
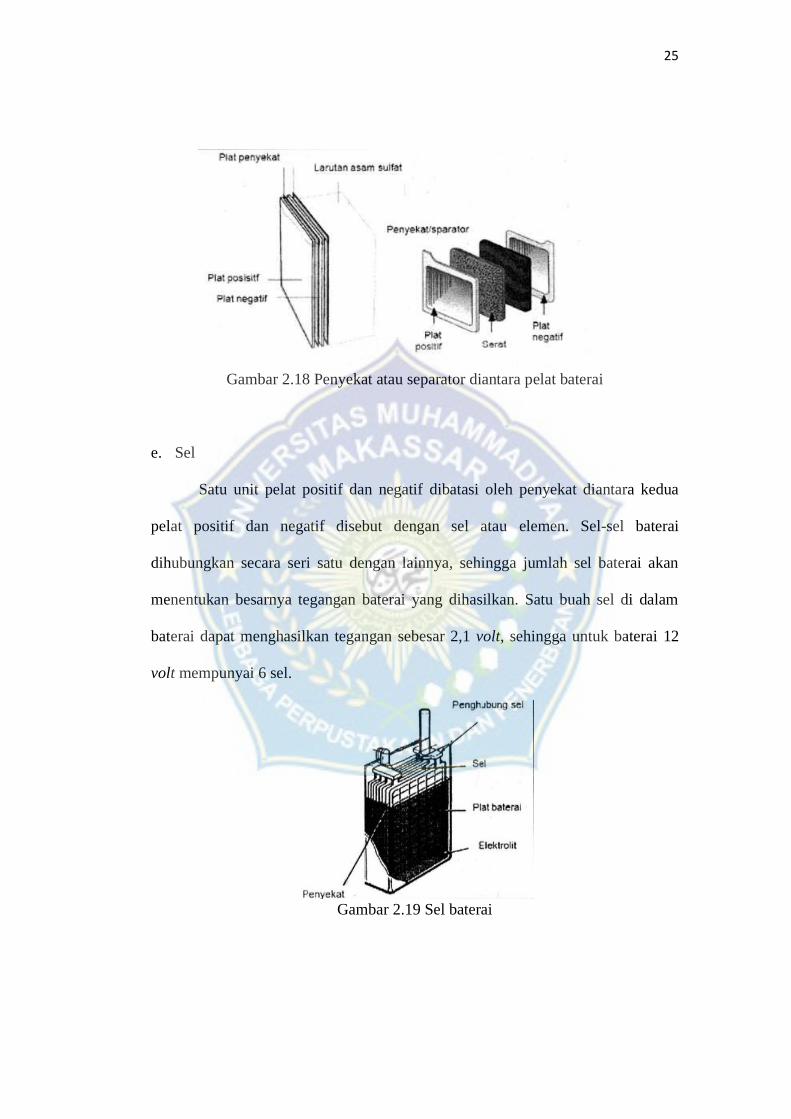
Gambar 2.18 Penyekat atau separator diantara pelat baterai
e. Sel
Satu unit pelat positif dan negatif dibatasi oleh penyekat diantara kedua
pelat positif dan negatif disebut dengan sel atau elemen. Sel-sel baterai
dihubungkan secara seri satu dengan lainnya, sehingga jumlah sel baterai akan
menentukan besarnya tegangan baterai yang dihasilkan. Satu buah sel di dalam
baterai dapat menghasilkan tegangan sebesar 2,1 volt, sehingga untuk baterai 12
volt mempunyai 6 sel.
Gambar 2.19 Sel baterai

26
f. Penghubung sel (cell connector)
Merupakan pelat logam yang dihubungkan dengan pelat baterai. Pelat
penghubung ini untuk setiap sel ada dua buah (lihat gambar sel baterai), yaitu untuk
pelat positif dan pelat negatif. Penghubung sel pada pelat positif dan negatif
disambungkan secara seri untuk semua sel.
g. Pemisah sel
Ini merupakan bagian dari kotak baterai yang memisahkan tiap sel (Gambar
2.16).
h. Terminal baterai
Ada dua terminal pada baterai, yaitu terminal positif dan terminal negatif
yang terdapat pada bagian atas baterai. Saat terpasang pada kendaraan, terminal-
terminal ini dihubungkan dengan kabel besar positif (ke terminal positif baterai)
dan kabel massa (ke terminal negatif baterai).
Gambar 2.20 Terminal baterai

27
i. Tutup ventilasi
Komponen ini berfungsi untuk menambah atau memeriksa air baterai.
Lubang ventilasi berfungsi untuk membuang gas hidrogen yang dihasilkan saat
terjadi proses pengisian.
Gambar 2.21 Tutup ventilasi
j. Larutan elektrolit
Larutan elektrolit merupakan cairan pada baterai merupakan campuran
antara air (H2O) dan asam sulfat (H2SO4). Secara kimia, campuran tersebut bereaksi
dengan bahan aktif pada pelat baterai untuk menghasilkan listrik. Baterai yang terisi
penuh mempunyai kadar 36% asam sulfat dan 64% air. Larutan elektrolit
mempunyai berat jenis (specific gravity) 1,270 pada 20 oC (680F) saat baterai terisi
penuh.
2. Cara Kerja Accu
Menurut Gilang (2019) bahwa baterai merupakan kombinasi dua atau lebih
sel elektrokimia yang bisa menyimpan energi dan kemudian merubahnya menjadi
energi listrik.

28
a. Saat Baterai Aki Menerima Arus
1) Oksigen (O) pada pelat positif terlepas karena bereaksi/bersenyawa dengan
hidrogen (H) pada cairan elektrolit yang secara perlahan-lahan keduanya
bergabung/berubah menjadi air (H20).
2) Asam (SO4) pada cairan elektrolit bergabung dengan timah (Pb) di pelat positif
ataupun pelat negatif sehigga melekat dikedua pelat tersebut. Reaksi ini akan
berlangsung terus sampai isi baterai habis ataupun dalam kondisi discharge.
Ketika baterai dalam keadaan kosong, hampir semua asam menempel
pada pelat elektroda baterai, sehingga konsentrasi elektrolit sangat rendah,
hampir terdiri dari air (H2O), sehingga kerapatan cairan turun menjadi sekitar
1,1 kg/dm3, Ini mendekati berat jenis air, yaitu 1 kg/dm3. Meskipun baterai
masih pada beban penuh, berat jenisnya sekitar 1.285 kg/dm3. Melalui
perbedaan berat jenis ini, Anda dapat mengetahui apakah kapasitas baterai
masih terisi penuh atau hidrometer sudah berkurang. Selain itu, ketika baterai
dalam keadaan kosong, 85% elektrolit terdiri dari air (H2O), dimana air akan
membeku, baterai dapat pecah, dan pelat rusak) habis atau dalam keadaan
kosong.
b. Saat Baterai Menerima Arus
Arus penerima baterai mengacu pada baterai yang disetrum/diisi, yaitu
baterai diisi dengan arus searah, elektroda positif baterai terhubung ke arus
pengisian positif, dan elektroda negatif terhubung ke arus pengisian negatif.
Tegangan yang diberikan biasanya sama dengan tegangan total baterai, yaitu baterai
12 V memiliki tegangan 12 V DC, baterai 6 V memiliki tegangan 6 V DC, dan dua
29
baterai 12V dihubungkan secara seri dengan tegangan 24 V DC (baterai secara seri).
Tegangan total adalah jumlah dari tegangan masing-masing baterai: tegangan 1 +
tegangan 2 = tegangan total). Ini dapat ditemukan di bengkel baterai, di mana ada
beberapa baterai yang terhubung secara seri, dan semuanya tersengat listrik pada
saat yang bersamaan. Berapa banyak arus (ampere) yang harus dilewati juga
tergantung pada kapasitas baterai (penjelasan untuk ini dapat ditemukan di bawah).
Konsekuensinya, proses penerimaan arus ini berlawanan dengan proses
pengeluaran arus, yaitu:
1) Oksigen (O) dalam air (H2O) terlepas karena bereaksi/bersenyawa dengan
timah (Pb) pada pelat positif dan secara perlahan-lahan kembali menjadi oksida
timah colat (PbO2).
2) Asam (SO4) yang menempel pada kedua pelat (pelat positif maupun negatif)
terlepas dan bergabung dengan hidrogen (H) pada air (H2O) di dalam cairan
elektrolit dan kembali terbentuk menjadi asam sulfat (H2SO4) sebagai cairan
elektrolit. Akibatnya berat jenis cairan elektrolit bertambah menjadi sekitar
1,285 (pada baterai yang terisi penuh).
3. Kapasitas Baterai
Kapasitas baterai adalah jumlah ampere jam (Ah = kuat arus/Ampere x
waktu/hour), artinya baterai dapat memberikan/menyuplai sejumlah isinya secara
rata-rata sebelum tiap selnya menyentuh tegangan/voltase turun (drop voltage)
yaitu sebesar 1,75 V (ingat, tiap sel memiliki tegangan sebesar 2 V; jika dipakai
maka tegangan akan terus turun dan kapasitas efektif dikatakan sudah terpakai

30
semuanya bila tegangan sel telah menyentuh 1,75 V). Misal, baterai 12 V 75 Ah.
Baterai ini bisa memberikan kuat arus sebesar 75 Ampere dalam satu jam artinya
memberikan daya rata-rata sebesar 900 Watt. Secara hitungan kasar dapat
menyuplai alat berdaya 900 Watt selama satu jam atau alat berdaya 90 Watt selama
10 jam. Jadi ampere hour (Ah) adalah satuan banyaknya listrik. Jumlah Ah yang
harus diberikan pada proses pengisian tentu lebih besar dari Ah yang diberikan oleh
baterai aki.
Hasil bagi antara kapasitas dalam Ah terhadap besarnya Ah pada proses
pengisian kemudian dikalikan dengan 100 % disebut sebagai randemen Ah dari
baterai aki. Untuk baterai aki yang baru randemennya berkisar antara 90 % sampai
95 %.
a. Faktor Yang Mempengaruhi Kapasitas Aki
1) Jumlah bahan aktif
Makin besar ukuran pelat yang bersentuhan dengan cairan elektrolit maka
makin besar kapasitasnya makin banyak pelat yang bersentuhan dengan cairan
elektrolit maka makin besar kapasitasnya. Jadi untuk mendapatkan kapasitas yang
besar luas pelat dan banyaknya pelat haruslah ditingkatkan.
2) Temperatur
Makin rendah temperatur (makin dingin) maka makin kecil kapasitas baterai
saat digunakan karena reaksi kimia pada suhu yang rendah makin lambat tidak
peduli apakah arus yang digunakan tinggi atapun rendah. Kapasitas baterai biasanya
diukur pada suhu tertentu, biasanya 25 0C.

31
3) Waktu dan arus pengeluaran
Pengeluaran lambat (berupa pengeluaran arus yang rendah) mengakibatkan
waktu pengeluaran juga makin lama pemakaiannya. Sebaliknya jika arus
pengeluarannya besar maka energi yang tersimpan pada baterai aki akan cepat
habis.
D. Device Kontrol Motor
1. Relai
(a) (b)
Gambar 2.22 (a) Bentuk relai, (b) Simbol relai
Menurut Hadibrata, dkk (2014) bahwa relai adalah suatu komponen yang
bekerja berdasarkan elektromagnetik untuk menggerakan sejumlah kontaktor yang
tersusun atau sebuah saklar elektronis yang dapat dikendalikan dari rangkaian
elektronik lainnya dengan memanfaatkan tenaga listrik sebagai sumber energinya.
Kontaktor akan tertutup (menyala) atau terbuka (mati) karena efek induksi magnet
yang dihasilkan kumparan (induktor) ketika dialiri arus listrik. Berbeda dengan
saklar, pergerakan kontaktor (on atau off) dilakukan manual tanpa perlu arus listrik.

32
Relai yang paling sederhana ialah relai elektromekanis yang memberikan
pergerakan mekanis saat mendapatkan energi listrik. Secara sederhana relai
elektromekanis ini didefinisikan sebagai berikut:
a. Alat yang menggunakan gaya elektromagnetik untuk menutup (atau membuka)
kontak saklar.
b. Saklar yang digerakkan (secara mekanis) oleh daya/energi listrik.
Jadi dapat disimpulkan bahwa relai adalah komponen elektronika berupa
saklar elektronik yang digerakkan oleh arus listrik. Beberapa fungsi relai yang telah
umum diaplikasikan ke dalam peralatan elektronika diantaranya adalah:
a. Relai digunakan untuk menjalankan fungsi logika (logic function)
b. Relai digunakan untuk memberikan fungsi penundaan waktu (time delay
function)
c. Relai digunakan untuk mengendalikan sirkuit tegangan tinggi dengan bantuan
dari signal tegangan rendah.
d. Ada juga relai yang berfungsi untuk melindungi motor ataupun komponen
lainnya dari kelebihan tegangan ataupun hubung singkat (short).
e. Penguatan daya: menguatkan arus atau tegangan. Contoh: starting relai pada
mesin mobil
Suatu jenis relai yang dapat menangani kekuatan tinggi yang diperlukan
untuk secara langsung mengontrol motor listrik atau beban lain disebut kontaktor.
relai solid-state mengontrol sirkuit listrik tanpa bagian yang bergerak, bukan
menggunakan perangkat semikonduktor untuk melakukan switching. Relai dengan
karakteristik operasi dikalibrasi dan kadang-kadang beberapa kumparan operasi
33
yang digunakan untuk melindungi sirkuit listrik dari kelebihan beban atau
kesalahan; dalam sistem tenaga listrik modern fungsi-fungsi ini dilakukan oleh
instrumen digital masih disebut "relai pelindung".
a. Prinsip Kerja Relai
Menurut Amirah (2014) bahwa relai merupakan tuas saklar dengan lilitan
kawat pada batang besi (solenoid) di dekatnya. Ketika solenoid dialiri arus listrik,
gaya magnet yang dihasilkan oleh solenoida menarik tuas dan menutup kontak
saklar. Pada saat arus dihentikan, gaya magnet akan hilang, tuas akan kembali ke
posisi semula dan kontak saklar kembali terbuka. Relai biasanya digunakan untuk
mengendalikan arus/tegangan yang besar (sbagai contoh peralatan listrik 4
ampere AC 220 V) dengan menggunakan arus/tegangan yang kecil (misalnya 0.1
ampere 12 V DC)).
b. Jenis –Jenis dan Simbol Relai
1) Jenis Relai Berdasarkan Cara Kerja
Menurut Amirah (2014), bahwa relai memiliki kondisi saklar atau
kontaktor dalam 3 posisi. Ketika relai menerima sumber tegangan oleh
elektromagnet, ia mengubah tiga posisi pada sakelar atau kontaktor. Ketiga posisi
saklar relai tersebut adalah:
a. Posisi Normally Open (NO), yaitu posisi saklar relai yang terhubung ke
terminal NO (Normally Open). Kondisi ini terjadi ketika relai menerima

34
tegangan listrik melalui solenoid.
b. Posisi Normally Close (NC), yaitu posisi saklar relai yang terhubung ke
terminal NC (Normally Close). Kondisi ini terjadi ketika relai tidak menerima
suplai tegangan melalui elektromagnet.
c. Posisi Change Over (CO), yaitu kondisi perubahan armatur saklar relai yang
berubah dari posisi NC ke NO atau sebaliknya dari NO ke NC. Kondisi ini
terjadi ketika sumber tegangan diberikan pada elektromagnet atau ketika
sumber tegangan diputus dari elektromagnet relai.
Di antara aplikasi relai yang dapat ditemui diantaranya adalah: Relai
sebagai kontrol ON/OFF beban dengan sumber tegangan berbeda. Relai sebagai
selektor atau pemilih hubungan. Relai sebagai pelindung atau pemutus arus
dalam kondisi tertentu relai sebagai pelaksana rangkaian (delay).
2) Jenis Relai Berdasarkan Jumlah Pole dan Throw
Menurut Hadibrata, dkk (2014) bahwa penggolongan relai berdasar jumlah
pole dan throw sebagai berikut :
a. SPST (Single Pole Single Throw)
Relai ini memiliki empat terminal yaitu, dua terminal kumparan atau koil
dan dua terminal saklar (A dan B) yang dapat diputuskan dan dihubungkan.

35
Gambar 2.23 Tampilan relai Jenis SPST
b. SPDT (Single Pole Double Pole)
Relai ini memiliki lima terminal, yaitu dua terminal kumparan atau koil
dan tiga terminal saklar (A,B, dan C) yang dapat terhubung dan terputus dengan
satu terminal pusat. Jika suatu saat terminal (A) terputus dengan terminal pusat
(C) maka terminal lain (B) terhubung dengan terminal pusat tersebut (C),
demikian juga sebaliknya.
Gambar 2.24 Tampilan relai jenis SPDT
c. DPST (Double Pole Single Throw)
Relai ini memiliki enam terminal, yaitu dua terminal kumparan atau koil
dan empat terminal, yaitu dua pasang saklar yang dapat terhubung dan terputus
(A1 dan B1 serta A2 dan B2).
Gambar 2.25 Tampilan relai jenis DPST

36
d. DPDT (Double pole Double Throw)
Relai ini memiliki delapan terminal, yaitu dua terminal kumparan atau
koil, keenam terminal merupakan dua set saklar yang dapat diputus dan
dihubungkan (A1, B1, C1 dan A2, B2, C2).
Gambar 2.26 Tampilan relai jenis DPDT
c. Konstruksi Relai
Bagian utama relai elektro mekanik adalah sebagai berikut:
a. Kumparan elektromagnet
b. Saklar atau kontaktor
c. Swing Armatur
d. Spring (Pegas)
Gambar 2.27 Konstruksi Relai Elektro Mekanik Posisi NC (Normally Close)

37
Dari konstruksi relai elektro mekanik pada gambar 2.27 dapat diuraikan
sistem kerja atau proses relai bekerja. Ketika elektromagnet tidak menerima
sumber tegangan, relai skalar tetap terhubung ke terminal NC (Normally Close).
karena tidak ada medan magnet untuk menarik angker. Ketika elektromagnet
menerima sumber tegangan, ada medan magnet yang menarik armature,
sehingga sakelar relai terhubung ke terminal NO (Normally Open) seperti yang
ditunjukkan pada Gambar 2.28
Gambar 2.28 Konstruksi relai elektro mekanik posisi NO (Normally Open)
2. Kontaktor
Menurut Gunawan dan Wahyono (2017) menyatakan bahwa kontaktor
(magnetic contactor) yaitu peralatan listrik yang menggunakan prinsip induksi
elektromagnetik untuk bekerja. Ada belitan di kontaktor, ketika arus diterapkan,
medan magnet dibangkitkan di inti, sehingga kontak tertarik oleh gaya magnet yang
dihasilkan. Kontak bantu NO (biasanya terbuka) akan menutup, dan kontak bantu
NC (biasanya tertutup) akan terbuka. Kontak pada kontaktor terdiri dari kontak
utama dan kontak bantu. Kontak utama digunakan untuk rangkaian daya, dan

38
kontak bantu digunakan untuk rangkaian kontrol. Dalam kontaktor elektromagnetik
inti besi berisi kumparan utama, ketika dua inti besi dihubungkan satu sama lain,
kumparan hubung singkat bertindak sebagai peredam kejut.
Jika kumparan utama diberi energi, medan magnet akan dihasilkan di inti
besi, yang akan menarik inti besi dari kumparan hubung singkat yang digabungkan
ke kontak utama dan kontak bantu kontaktor. Hal ini akan menyebabkan kontak
utama dan kontak bantunya akan bergerak dari posisi normal dimana kontak NO
akan tertutup sedangkan NC akan terbuka.
Selama kumparan utama kontaktor tersebut masih dialiri arus, kontak
akan tetap dalam posisi aktif. Menempatkan tegangan yang terlalu tinggi pada
koil kontaktor akan memperpendek umur koil kontaktor. Namun, jika tegangan
yang diberikan terlalu rendah, tekanan antara kontak kontaktor akan turun. Ini
dapat menyebabkan percikan di permukaan dan merusak kontak. Kisaran
toleransi tegangan koil kontaktor adalah 85% - 110% dari tegangan kerja
kontaktor.
Gambar 2.29 Kontaktor
39
E. Potensiometer
Menurut Zumain (2009) bahwa potensiometer terbagi menjadi dua jenis
berdasarkan perbandingan perubahan nilai resistansi potensiometer dengan
kedudukan kontak gesernya yaitu potensiometer linier dan potensiometer
logaritmis. Potensiometer linier adalah jenis potensiometer yang perubahan nilai
resistansinya sebanding dengan kedudukan kontak gesernya. Tetapi sebaliknya jika
perubahan nilai resistansi potensiometer tersebut tidak sebanding dengan
kedudukan kontak gesernya maka potensiometer semacam ini disebut
potensiometer disebut potensiometer logaritmis.
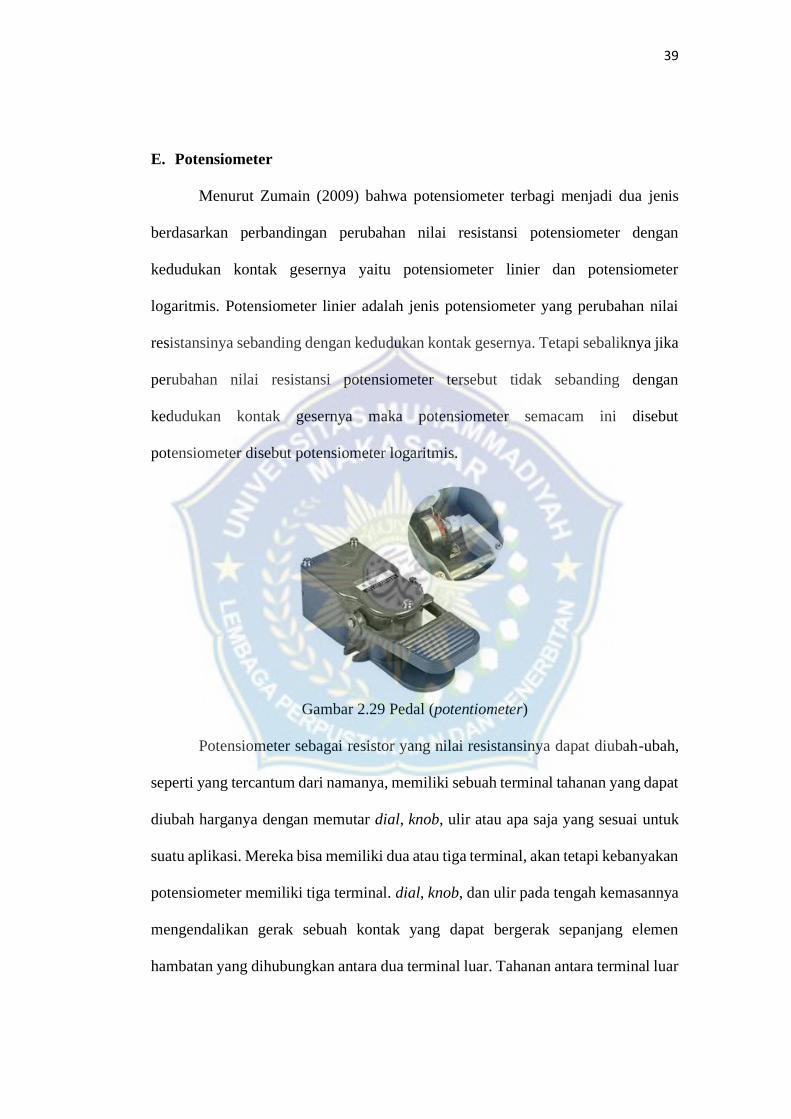
Gambar 2.29 Pedal (potentiometer)
Potensiometer sebagai resistor yang nilai resistansinya dapat diubah-ubah,
seperti yang tercantum dari namanya, memiliki sebuah terminal tahanan yang dapat
diubah harganya dengan memutar dial, knob, ulir atau apa saja yang sesuai untuk
suatu aplikasi. Mereka bisa memiliki dua atau tiga terminal, akan tetapi kebanyakan
potensiometer memiliki tiga terminal. dial, knob, dan ulir pada tengah kemasannya
mengendalikan gerak sebuah kontak yang dapat bergerak sepanjang elemen
hambatan yang dihubungkan antara dua terminal luar. Tahanan antara terminal luar

40
selalu tetap pada harga penuh yang terdapat pada potensiometer, tidak terpengaruhi
pada posisi lengan geser. Dengan kata lain tahanan antar terminal luar untuk
potensiometer 10 Kohm, akan selalu 10 Kohm, tidak ada masalah bagaimana kita
putar elemen kendali. Tahanan antara lengan geser dan salah satu terminal luar
dapat diubah-ubah dari harga minimum yaitu nol ohm sampai harga maksimum
yang sama dengan harga penuh potensiometer tersebut. Jumlah tahanan antara
lengan geser dan masing-masing terminal luar harus sama dengan besar tahanan
penuh potensiometer. Apabila tahanan antara lengan geser dan salah satu kontak
luar meningkat, maka tahanan antara lengan geser dan salah satu terminal luar yang
lain akan berkurang.

41
BAB III
METODE PENELITIAN
Pada bab ini akan dibahas mengenai proses perancangan perangkat-
perangkat yang digunakan dalam pembuatan sistem pengendalian mobil listrik
(electric drive). Dengan demikian perancangan ini dapat menghasilkan kesimpulan
yang dapat dipertanggungjawabkan. Langkah-langkah yang telah ditetapkan adalah
penetapan tempat dan waktu penelitian, penetapan alat dan bahan, penetapan
prosedur percobaan dan membuat diagram alur pengujian.
A. Waktu dan Tempat Penelitian
Waktu : Maret 2021 hingga Juli 2021
Tempat : Fakultas Teknik, Universitas Muhammadiyah Makassar
Jalan Sultan Alauddin No.259 Makassar
B. Peralatan dan Bahan
1. Peralatan
Tabel 3.1 Alat Penelitian
No Alat Jumlah
1. Multimeter digital 1 buah
2. Tachometer digital 1 buah
3. Voltmeter 1 buah
4. Obeng 2 buah
5. Tang kombinasi 2 buah
6. Cutter 2 buah
7. Solder 1 buah

42
2. Bahan
Tabel 3.2 Bahan Penelitian
No Bahan Jumlah
1. Motor DC Magnet Permanen 22 V; Arus maksimal 15 A 1 buah
2. Sumber DC 12 V 1 buah
3. Relai DC 12 V; 80 A 4 buah
4. Relai DC 12 V; 1 A 3 buah
5. Switch Push Button (Normally Close) 2 buah
6. Switch Push Button (Open Close) 1 buah
7. Resistor ¼ W; 1,5 kΩ 3 buah
8. Lampu LED 5 V 3 buah
9. Fuse 10 A 2 buah
10. Kabel Secukupnya
11. Spacer 16 buah
12. Terminal 6 buah
13. Skun kabel Secukupnya
14. Soket 3 buah
15. PCB 1 buah
16. Papan Fiber 3 Lembar
17. Saklar ganda 3 posisi 1 buah
18. Sekering + rumah sekering 2 buah
19. Potensiometer 1 buah
20. Timah Secukupnya

43
C. Diagram Balok Sistem
Gambar 3.1 Diagram balok skema penelitian
Penjelasan lengkap sistem diagram blok diatas sebagai berikut:
1. Baterai
Baterai sebagai sumber energi listrik, sistem pusat kendali dan converter
daya variabel mobil listrik. Baterai akan mengalirkan listrik jika ada beban.
2. Diskonektor
Diskonektor berfungsi sebagai pemutus ataupun penghubung arus listrik.
Baterai 12 V; 18 Ah
Diskonektor
Sistem Kendali Arah Putaran (Maju / Mundur)
Motor DC
Pengatur Kecepatan Arah Maju Arah Mundur
Lampu Lampu
Kendaraan
Ringan
Sistem Relai Pengunci

44
3. Sistem Relai Pengunci
Relai pengunci berfungsi sebagai pengunci aliran listrik saat menekan push
button baik itu saat putaran maju/mundur, saat menekan push button maju ataupun
mundur maka relai dalam kondisi energies, sehingga arus yang stand by di kaki
(com) relai membuatnya terus aktif (terkunci) walaupun push button tidak ditekan
lagi.
Apabila relai masih aktif (terkunci) dan menekan push button netral maka
akan memutuskan tegangan pada relai maju/mundur sehingga relai yang
sebelumnya terkunci akan kembali pada posisi normal.
4. Sistem kendali arah putaran
Sistem ini berfungsi untuk mengatur arah putaran motor, setelah
melewati relai pengunci arah putaran motor tergantung dari masuknya arus
diantara relai sistem pengendali, sehingga relai pada posisi maju/mundur
tersebut dalam kondisi energies yang membuat terhubungnya arus dari speed
controller ke motor.
5. Pengatur kecepatan
Untuk mengatur kecepatan motor dibutuhkan pengatur tegangan yang
masuk ke motor, karena besar tegangan berbanding lurus dengan kecepatan motor
6. Motor
Motor berfungsi sebagai pengubah energi listrik menjadi energi mekanik
(penggerak).

45
D. Langkah Penelitian
TIDAK
YA
TIDAK
YA
Mulai
Perumusan
Masalah
Studi
Literatur
Perencanaan
Kontrol
Sesuai
Spesifikasi
Pembuatan
Kontrol
Sesuai Dengan
Perencanaan
Pengujian dan
Pengambilan data
A B

46
Gambar 3.2 Flow chart proses penelitian
Diagram alir diatas menjelaskan tentang proses perancangan dan pembuatan alat
yang secara singkat uraiannya sebagai berikut :
1. Perumusan Masalah
Langkah pertama yang harus dilakukan sebelum melakukan penelitian ini
adalah menentukan rumusan masalah yang akan diteliti. Sehingga dari rumusan
masalah ini akan ditemukan berbagai permasalahan yang akan dibahas dan diteliti.
2. Studi Literatur
Setelah merumuskan masalah yang akan diteliti, maka materi yang
menunjang berjalannya penelitian ini diperlukan agar mempermudah dan
membatasi penelitian tentang Sistem kontrol mobil listrik.
TIDAK
YA
SELESAI
A B
Sesuai Dengan
Perencanaan
Pengujian dan
Pengambilan data

47
3. Perencanaan Kontrol
Merencanakan spesifikasi dari kontrol, yang nantinya akan dijadikan
sebagai bahan untuk merancang kontrol yang sesuai dan layak diaplikasikan pada
rancang bangun mobil listrik.
4. Pembuatan Alat
Merancang kontrol yang akan diaplikasikan pada rancang bangun mobil
listrik, mengacu pada spesifikasi yang telah direncanakan pada tahap perencanaan.
5. Pengujian dan Pengambilan Data
Adalah inti yang menentukan dari penelitian ini, apabila alat bekerja sesuai
dengan apa yang harapkan, maka sudah bisa dikatakan kontrol layak diaplikasikan
pada rancang bangun mobil listrik. Setelah alat diuji coba, pengambilan data
dilakukan untuk memperoleh hasil.

48
BAB IV
HASIL DAN PEMBAHASAN
Pada bab ini akan membahas tentang perancangan dan pengukuran terhadap
alat yang telah dibuat. Dari proses perancangan dan pengukuran yang dilakukan
kemudian akan didapatkan data hasil pengukuran, selanjutnya dilakukan proses
analisa terhadap data hasil pengukuran tersebut. Hasil analisa tersebut kemudian
dibandingkan dengan teori yang dipelajari sebelumnya.
Dalam proses pengukuran dan uji coba dibagi menjadi pengukuran pada
perangkat mekanik dan pengukuran pada perangkat elektrik. Untuk melakukan
pengukuran pada perangkat mekanik, maka dibutuhkan alat ukur yang disesuaikan
dengan parameter (besaran) yang akan diukur. Untuk perangkat mekanik parameter
yang akan diukur yaitu banyaknya revolusi per menit (RPM), sehingga alat ukur
yang diperlukan yaitu tachometer.
Begitu juga untuk melakukan pengukuran pada perangkat elektrik, maka
dibutuhkan alat ukur yang disesuaikan dengan parameter (besaran) yang akan
diukur. Untuk perangkat elektrik parameter yang akan diukur yaitu tegangan (V),
sehingga alat ukur yang diperlukan yaitu voltmeter. Untuk memudahkan
pembacaan hasil ukur, maka multimeter yang akan digunakan adalah multimeter
digital.

49
A. Perancangan Sistem Elektrik
Tahapan perancangan sistem elektrik sangat penting karena sebuah sistem
mobil listrik harus memiliki sistem kelistrikan yang akan memberikan tenaga
listrik, yang akan dikonversikan menjadi tenaga gerak oleh motor penggerak, dalam
hal ini yang digunakan sebagai motor penggerak adalah motor listrik DC magnet
permanen pada statornya. Karena tanpa memiliki sistem kelistrikan, maka sebuah
mobil tidak dapat digerakkan dan diatur kecepatannya. Sehingga dengan demikian
sistem elektrik ini perlu dirancang.
Oleh karena itu maka dilakukanlah proses perancangan sistem ini dengan
menyesuaikan kondisi perangkat dan tempat yang tersedia. Hal ini perlu
dipertimbangkan agar nantinya proses pemindahan energi dari sumber listrik sampe
ke motor listrik penggerak tidak mengalami masalah dan gangguan. Selain itu juga
agar mempermudah proses perakitan nantinya.
Macam-macam perangkat yang digunakan pada rancangan sistem elektrik
ini yaitu : motor penggerak, sumber tegangan, relai pengendali, relai pengunci
sistem controller, switch, soket, terminal blok, fuse, pengkabelan, lampu pilot, led
dan lain-lain.

50
1. Wiring Diagram
Gambar 4.1 Wiring Diagram
Wiring Diagram diagram diatas memperlihatkan skema perancangan alat-
alat yang membentuk beberapa sistem, kemudian sistem tersebut dirangkai satu
sama lain sehingga memiliki fungsi baru dan saling berkaitan satu sama lainnya
Adapun sistem pengoperasiannya yaitu:
1. Posisi Maju
Dengan menekan tombol maju (push bottom) warna hijau, maka arus akan
terhubung ke sistem relai pengunci yaitu relai C yang ditandai dengan
menyalanya lampu LED dan lampu pilot warna biru, kemudian terhubung
ke sistem pengendali arah yaitu relai A1 dan A2 (energies) sehingga motor
berputar maju.

51
2. Posisi Netral
Dengan menekan tombol netral (push bottom) warna merah, maka arus
akan terputus
3. Posisi Mundur
Dengan menekan tombol mudur (push bottom) warna hijau, maka arus
akan terhubung ke sistem relai pengunci yaitu relai D yang ditandai
dengan menyalanya lampu LED dan lampu pilot warna merah, kemudian
terhubung ke sistem pengendali arah yaitu relai B1 dan B2 (energies)
sehingga motor berputar mundur.
B. Pengukuran Alat
Untuk melakukan pengukuran pada sistem ini maka dibutuhkan alat ukur
yang disesuaikan dengan parameter (besaran) yang akan diukur. Parameter yang
diukur yaitu tegangan (V) dan kecepataran putaran motor (RPM), sehingga alat
ukur yang diperlukan yaitu multimeter dan tachometer.
Pengukuran yang akan dilakukan yaitu :
1. Pengukuran pada output baterai
2. Pengukuran sistem pengendali arah
3. Pengukuran pada input motor
4. Pengukuran putaran motor
1. Pengukuran Pada Output Baterai
Pengukuran output baterai dilakukan untuk mengetahui besarnya tegangan
baterai pada keadaan maju dan mundur yang dilakukan sebanyak tiga kali

52
percobaan dengan hasil yang di rata-ratakan. Baterai yang digunakan memiliki
spesifikasi 12 V DC / 18 Ah sebanyak satu buah.
a. Hasil Pengukuran Tegangan Output Baterai Pada Putaran Maju
Berikut grafik rata-rata pengukuran tegangan output baterai
Grafik 4.1 pengukuran tegangan output baterai pada putaran maju
Grafik diatas memperlihatkan hasil rata-rata pengukuran tegangan output
baterai terhadap nilai resistansi potensiometer. Pada nilai R1 menghasilkan
pengukuran rata-rata tegangan output baterai lebih tinggi dari nilai resistansi yang
lainnya yaitu sebesar 11,96 V. Kemudian pada nilai R2 mengalami penurunan
tegangan output sebesar 0,01 V. Pada nilai R3 dan R4 menghasilkan tegangan
output yang sama yaitu 11,94 V. Lalu pada R5 mengalami peningkatan tegangan
sebesar 0,01 V.
11.96
11.95
11.94 11.94
11.95
11.93
11.94
11.94
11.95
11.95
11.96
11.96
11.97
R1 R2 R3 R4 R5
Tega
nga
n (
V)
Nilai Resistansi Potensionmeter
Vout Sumber (Maju)

53
b. Hasil Pengukuran Tegangan Output Baterai Pada Putaran Mundur
Berikut rata-rata pengukuran tegangan output baterai
Grafik 4.2 pengukuran tegangan output baterai pada putaran mundur
Grafik diatas memperlihatkan hasil rata-rata pengukuran tegangan output
baterai terhadap nilai resistansi potensiometer. Pada nilai R1 menghasilkan
pengukuran rata-rata tegangan output baterai lebih tinggi dari percepatan yang
lainnya yaitu sebesar 11,96 V. Kemudian pada nilai R2 mengalami penurunan
tegangan output sebesar 0,01 V yang nilainya sama dengan nilai R3 dan R4.
Berikutnya pada nilai R5 mengalami peningkatan tegangan output sebesar 11,95 V.
2. Pengukuran Tegangan Sistem Pengendali Arah
Pengukuran tegangan sistem pengendali arah dilakukan untuk mengetahui
besarnya tegangan yang masuk pada input relai dalam keadaan maju, netral dan
11.96
11.95 11.9511.95
11.95
11.94
11.94
11.94
11.95
11.95
11.95
11.95
11.95
11.96
11.96
R1 R2 R3 R4 R5
Tega
nga
n (
V)
Nilai Resistansi Potensionmeter
Vout Sumber (Mundur)

54
mundur yang dilakukan sebanyak tiga kali percobaan dengan hasil yang dirata-
ratakan. Relai yang digunakan memiliki spesifikasi 12 V DC / 80 A sebanyak empat
buah.
Tabel 4.1 Hasil pengukuran sistem pengendali arah
Tabel diatas memperlihatkan hasil pengukuran tegangan relai sistem
pengendali arah yaitu pada posisi maju, netral dan mundur. Secara keseluruhan
hasil pengukurannya berbeda-beda.
Pada posisi maju, relai A1 dan A2 dalam status energies (aktif) dengan
tegangan sebesar 11,83 V. Sedangkan relai B1 dan B2 dalam status non energies
(tidak aktif) dengan tegangan sebesar 0,12 V. Pada posisi netral semua relai dalam
status non energies (tidak aktif) dengan tegangan sebesar 0,01 V. Sementara pada
posisi mundur relai A1 dan A2 dalam status non energies (tidak aktif) dengan
tegangan sebesar 0,11 V. Sedangkan relai B1 dan B2 dalam status energies (aktif)
dengan tegangan sebesar 11,80 V.
Posisi
Vin Relai A Vin Relai B
A1 Status A2 Status B1 Status B2 Status
Maju 11,83 Energies 11,83 Energies 0,12
Non
Energies
0,12
Non
Energies
Netral 0,01
Non
Energies
0,01
Non
Energies
0,01
Non
Energies
0,01
Non
Energies
Mundur 0,11
Non
Energies
0,11
Non
Energies
11,80 Energies 11,80 Energies

55
3. Pengukuran Pada Input Motor
Pengukuran tegangan motor dilakukan untuk mengetahui besarnya
tegangan yang masuk pada input motor dalam keadaan maju dan mundur yang
dilakukan sebanyak tiga kali percobaan dengan hasil yang di rata-ratakan. Motor
yang digunakan memiliki spesifikasi 12-18 V DC / 15 A sebanyak satu buah.
a. Hasil Pengukuran Tegangan Input Motor Pada Putaran Maju
Berikut rata-rata pengukuran tegangan input motor
Grafik 4.3 pengukuran tegangan input motor pada putaran maju
Grafik diatas memperlihatkan hasil rata-rata pengukuran tegangan input
motor pada putaran maju. Secara keseluruhan hasil pengukuran rata-rata tegangan
input motor mengalami peningkatan seiring dengan besar nilai resistansi.
Pada nilai R1 menghasilkan pengukuran rata-rata tegangan input motor
lebih rendah dari yang lainnya yaitu sebesar 0,47 V. Dan pada nilai R5
menghasilkan tegangan input maksimal sebesar 11,76 V. Kemudian setiap
mengalami peningkatan nilai resistansi maka nilai tegangan juga meningkat.
0.47
2.90
6.11
9.32
11.76
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
R1 R2 R3 R4 R5
Tega
nga
n (
V)
Nilai Resistansi Potensiometer
Vin Motor (Maju)
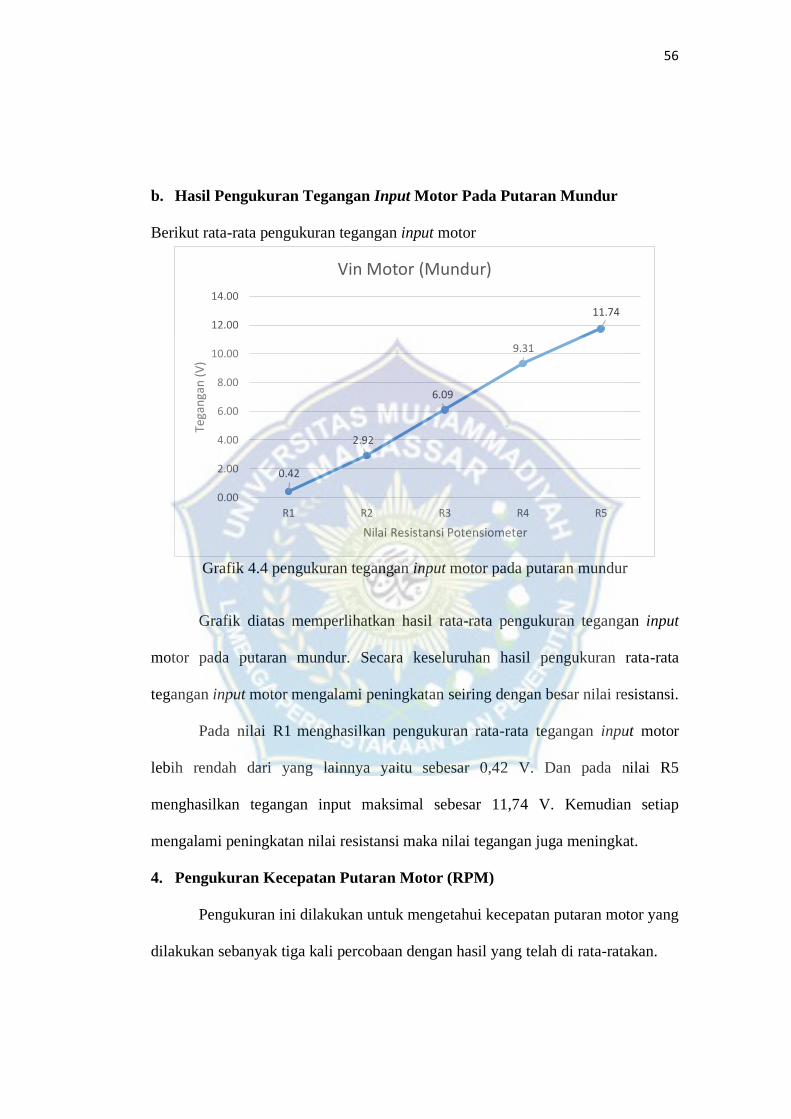
56
b. Hasil Pengukuran Tegangan Input Motor Pada Putaran Mundur
Berikut rata-rata pengukuran tegangan input motor
Grafik 4.4 pengukuran tegangan input motor pada putaran mundur
Grafik diatas memperlihatkan hasil rata-rata pengukuran tegangan input
motor pada putaran mundur. Secara keseluruhan hasil pengukuran rata-rata
tegangan input motor mengalami peningkatan seiring dengan besar nilai resistansi.
Pada nilai R1 menghasilkan pengukuran rata-rata tegangan input motor
lebih rendah dari yang lainnya yaitu sebesar 0,42 V. Dan pada nilai R5
menghasilkan tegangan input maksimal sebesar 11,74 V. Kemudian setiap
mengalami peningkatan nilai resistansi maka nilai tegangan juga meningkat.
4. Pengukuran Kecepatan Putaran Motor (RPM)
Pengukuran ini dilakukan untuk mengetahui kecepatan putaran motor yang
dilakukan sebanyak tiga kali percobaan dengan hasil yang telah di rata-ratakan.
0.42
2.92
6.09
9.31
11.74
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
R1 R2 R3 R4 R5
Tega
nga
n (
V)
Nilai Resistansi Potensiometer
Vin Motor (Mundur)

57
a. Hasil Pengukuran Pada Putaran Maju
Berikut rata-rata pengukuran kecepatan putaran motor
Grafik 4.5 pengukuran kecepatan putaran motor pada putaran maju
Grafik diatas memperlihatkan hasil rata-rata pengukuran kecepatan motor
pada putaran maju. Secara keseluruhan hasil pengukuran kecepatan motor pada
setiap percepatan mengalami peningkatan.
Pada nilai R1 motor tidak mengalami perputaran, pada nilai R2
menghasilkan rata-rata putaran sebesar 70,63 RPM. Kemudian mengalami
peningkatan putaran sebesar 189,93 RPM pada nilai R3. Selanjutnya terus
mengalami peningkatan putaran pada nilai R4 sebesar 310,60 RPM. Sementara
putaran tertinggi dihasilkan pada nilai R5 yaitu sebesar 404,30 RPM.
0
70.63
189.93
310.60
404.30
0
50
100
150
200
250
300
350
400
450
R1 R2 R3 R4 R5
Kec
epat
an (
RP
M)
Nilai Resistansi Potensiometer
Kecepatan Motor (RPM)(Maju)

58
b. Hasil Pengukuran Pada Putaran Mundur
Berikut rata-rata pengukuran kecepatan putaran motor
Grafik 4.6 pengukuran kecepatan putaran motor pada putaran mundur
Grafik diatas memperlihatkan hasil rata-rata pengukuran pengukuran
kecepatan motor pada putaran mundur dari nilai resistansi R1-R5. Secara
keseluruhan hasil pengukuran kecepatan putaran motor pada setiap percepatan
mengalami peningkatan.
Pada nilai R1 motor tidak mengalami perputaran. Dan pada nilai R2
menghasilkan rata-rata putaran sebesar 69,60 RPM. Kemudian mengalami
peningkatan putaran sebesar 187,00 RPM pada nilai R3. Selanjutnya terus
mengalami peningkatan putaran pada nilai R4 sebesar 306,57 RPM. Sementara
putaran tertinggi dihasilkan pada nilai R5 yaitu sebesar 399,97 RPM.
0
69.60
187.00
306.57
399.97
0
50
100
150
200
250
300
350
400
450
R1 R2 R3 R4 R5
Axi
s Ti
tle
Nilai Resistansi Potensiometer
RPM Motor

59
BAB V
PENUTUP
A. KESIMPULAN
Berdasarkan desain dan rancang bangun electric drive terdapat
berbagai sistem di dalamnya, mulai dari sistem push button, sistem relai
pengunci, sistem lampu indikator, dan sistem pengendali arah.
Berdasarkan hasil pengukuran pada rancangan sistem ED yang telah
dibuat, maka didapatkan kinerja dari sistem ED, yaitu :
1. Output sumber tegangan pada posisi maju dan mundur berpengaruh
terhadap nilai resistansi potensiometer, semakin besar nilai resistansi
potensiometer maka tegangan output sumber tegangan akan drop
kurang lebih 0.001 V.
2. Sistem pengendali arah saat posisi maju relai A dalam status energies
sedangkan relai B dalam status non energies. Sehingga tegangan yang
masuk di relai mengendalikan arah putaran motor, begitupun
sebaliknya.
3. Tegangan input pada motor baik posisi maju dan mundur berpengaruh
pada nilai resistansi potensiometer di sistem control speed. Disaat nilai
resistansi potensiometer rendah maka input yang masuk ke motor juga
rendah, sedangkan jika nilai resistansi potensiometer maksimal maka
input ke motor juga maksimal.

60
4. Putaran motor pada posisi maju atau mundur memiliki maksimal
putaran ±400 RPM.
B. SARAN
Kami menyadari bahwa sistem pengendali arah putaran yang kami buat
ini belum sempurna, sehingga pengembangan dan riset dapat terus dilakukan
guna mewujudkan sistem yang lebih baik, kompleks, dan memiliki
kemampuan yang lebih.

61
DAFTAR PUSTAKA
Aditya, Angga Wahyu. dkk. 2019. Evaluasi Motor Listrik Sebagai Penggerak
Mobil Listrik. Jurnal Riset Sains dan Teknologi. Vol. 3(2):55-59.
Amirah, Yeni. 2014. Menjaga Kesehatan Mata Melalui Pengontrolan Jarak
Pandang Pada Televisi Secara Otomatis (Hardware). Teknik Elektro.
Fakultas Teknik. Politeknik Negeri Sriwijaya.
Daryanto. 2003. Dasar- Dasar Teknik Mobil. Jakarta. Bumi Aksara.
Daryanto. 2003. Reparasi Sistem Kelistrikan Mesin Mobil. Jakarta. Bumi Aksara.
Gilang, Fatkhurozaq. 2019. Perawatan Dan Kegunaan Accumulator (Accu) Di Km.
Santika Nusantara. 0,37 Hp. Teknika. Fakultas Kemaritiman. Universitas
Maritim AMNI Semarang.
Gunawan, Ery. dan Eko Wahyono. 2017. Rancangan Instalasi Lampu Penerangan
Jalan Umum Dengan Sistem Kontaktor dan Timer. Jurnal Cahaya
Bagaskara. Vol 1(1):36-44.
Hadibrata, Musa. dkk. 2014. Relay. Diambil dari
http://industri3601.wordpress.com/relay/. Diakses pada 2 april 2021
Happyanto, Dedit Cahya dan Mauridhi Hery Purnomo. 2014. Teknik Kendali Motor
Induksi Tiga Fasa Berbasis Kecerdasan Komputasional Sebagai Penggerak
Mobil Listrik. Yogyakarta. Graha Ilmu.
Hartono, Rudi. dkk. 2016. Perancangan dan Pembuatan Mobil Sel Surya
menggunakan Motor DC magnet Permanen. Jurnal ENERGY. Vol 6(1):37-
42.
Kristianto, Philip. 2020. Fisika Dasar, Teori, Soal, dan Penyelesaian. Surabaya.
Andipublisher.
Kuswardana, Aditya. 2016. Analisis Sistem Motor Penggerak Pada Mobil Listrik
Dengan Kapasitas Satu Penumpang. Teknik Mesin. Fakultas Teknik.
Universitas Negeri Semarang.
Michael, Rudolf. 1995. Pengisi Batere & Accumulator. Solo. CV Aneka
Nur, Rusdi dan Muhammad Arsyad Suyuti. 2018. Perancangan Mesin-Mesin
Industri. Yogyakata. Deepublish.

62
Saleh, Anang Supriadi dan Amal Bahariawan. 2018. Energi dan Elektrifikasi
Pertanian. Yogyakarta. Deepublish.
Sukmawidjaja, Maula dan Budhi Nursulistyo. 2014. Pengaturan Kecepatan Motor
DC dengan DC Drive Sinamics DCM pada Size Press. JETri. Vol 12(1):89-
104.
Sumanto. 1995. Mesin Arus Searah. Yogyakarta. Andi Offset.
Yudha, Hendra Marta. 2020. Penggunaan Motor Listrik. Palembang. Pantera
Publishing.
Yuski, Moh. Nur. dkk. 2017. Rancang Bangun Jangkar Motor DC. Berkala
Saintek. Vol 2 :98-103.
Zumain, M Andri. 2009. Prototipe Mobil Listrik Dengan Menggunakan Motor DC
Magnet Permanen 0,37 HP. Teknik Elektro. Fakultas Teknik. Universitas
Indonesia Depok.

63
LAMPIRAN
LAMPIRAN 1
Rangkaian alat sistem electric drive
LAMPIRAN 2
Pengukuran tegangan sumber baterai

64
LAMPIRAN 3
Pengukuran kelayakan relai
LAMPIRAN 4
Pengukuran tegangan input motor

65
LAMPIRAN 5
Pengukuran kecepatan motor
LAMPIRAN 6
Percobaan 1
Posisi
Relai A1 Relai A2 Relai B1 Relai B2
No Nc No Nc No Nc No Nc
Netral 0.02 12.01 0.02 11.99 0.08 11.98 0.09 11.98
Maju 11.84 0.02 11.83 0.05 0.11 11.83 0.05 11.83
Mundur 0.03 11.81 0.06 11.81 11.81 0.15 11.88 0.01

66
Percobaan 2
Posisi
Relai A1 Relai A2 Relai B1 Relai B2
No Nc No Nc No Nc No Nc
Netral 0.03 12.01 0.02 12 0.09 12 0.15 12
Maju 11.88 0.01 11.87 0.03 0.14 11.87 0.09 11.86
Mundur 0.02 11.86 0.02 11.87 11.88 0.18 11.88 0.01
Percobaan 3
Posisi
Relai A1 Relai A2 Relai B1 Relai B2
No Nc No Nc No Nc No Nc
Netral 0.03 12 0.02 11.99 0.09 11.99 0.05 11.99
Maju 11.84 0.01 11.85 0.04 0.09 11.85 0.01 11.84
Mundur 0.03 11.89 0.04 11.9 11.9 0.16 11.9 0.02
Data pengukuran kelayakan relai

67
LAMPIRAN 7

68
Data pengukuran tegangan sumber, sistem pengendali arah, tegangan input motor,
dan RPM motor
LAMPIRAN 8
Data pengukuran resistansi potensiometer

69
LAMPIRAN 9
Spesifikasi Motor DC