signal and system - hansungkwangho/lectures/signal_system/2015... · signal and system ( chapter 9:...
TRANSCRIPT
1 Dept. Information and Communication Eng. 1
Signal and System( Chapter 9: The z-Transform )
Prof. Kwang-Chun [email protected]: 02-760-4253 Fax:02-760-4435
2 Dept. Information and Communication Eng. 2
What is the sampling of signals?Analog signals are continuous time signals
Can exist as voltage or current waveforms, or as mathematical functions
Modern systems must convert continuous time signals into discrete digital signals to be compatible with digital storage, digital transmission, and digital signal processing.
Sampling is the process in which continuous time signals are converted into discrete digital samples.Sampling is usually performed at a constant frequency
or sampling rate.
Sampling of Signals
( ) cos 2v t ft

3 Dept. Information and Communication Eng. 3
Sampling theorem of continuous signals:First of all, consider an ideal sampler, formed from a
periodic impulse waveform, as follows:
A discrete-time signal g(t) can be obtained by sampling f(t) with the ideal sampler
This equation is equivalent to the following since the delta function has the effect of making g(t) nonzero only at times .
Sampling of Signals
( ) ( )T sn
t t nT
0( ) ( ) ( )s
ng t f t t nT
st nT
0( ) ( ) ( )s s
ng t f nT t nT

4 Dept. Information and Communication Eng. 4
Sampling of Signals
n1 2 3 4

5 Dept. Information and Communication Eng. 5
Taking Laplace transform of the sampled signal, it yields
A much simpler expression results if the following substitutions are made:
Then, the definition of the z-transform is
If the sampling time is fixed, the z-transform can also be written
Sampling of Signals
0( ) ( ) ssnT
sn
G s f nT e
, ( ) ( )ssTz e G s G z
0( ) ( ) n
sn
G z f nT z
sT
( ) ( ) n
nG z f n z
Is the same as Discrete-Time FT for discrete time signal ( )f n
( ) ( ) sj T ns
n
G f nT e
(DTFT)

6 Dept. Information and Communication Eng. 6
A digital signal is superior to an analog signal because it is more robust to noise and can easily be recovered, corrected and amplified. For this reason, the tendency today is to change an
analog signal to digital data.Pulse code modulation (PCM) is essentially analog-
to-digital conversion of a special type, where the information contained in the instantaneous
samples of an analog signal is represented by digital words in a serial bit stream.
Digital Transmission

7 Dept. Information and Communication Eng. 7
PCM consists of three steps to digitize an analog signal:Sampling, Quantization, Binary encoding
Digital Transmission
(analog-to-digital converter)

8 Dept. Information and Communication Eng. 8
Sampling: Analog signal is sampled every sec.
Quantization: Quantizing operation approximates the analog values by
using a finite number of levels.
Binary encoding:Maps the quantized values to digital words that are
bits long.
Digital Transmission
sT
n

9 Dept. Information and Communication Eng. 9
Digital Transmission

10 Dept. Information and Communication Eng. 10
PCM DecoderTo recover an analog signal from a discrete digital
signal
Digital Transmission

11 Dept. Information and Communication Eng. 11
Example 9.1:Determine the z-transform of unit step signal
Solution:
A continuous step function shown above is plotted in blueand the sampled step in red.
The z-Transform
0 , 0( )
1 , 0t
x tt
Determine the Discrete-Time FT for discrete time signal ( )x n

12 Dept. Information and Communication Eng. 12
When a step function is sampled, each sample has a constant value of 1.
The z-transform can be written as a sum of terms as indicated below
The z-Transform
10
1( ) ( )1
n n
n nX z x n z z
z
1 1z If , this infinite series will converge !!
The set of values of z for which z-transform convergesis called the region of convergence (ROC).
X(z) exists for z-values in this ROC.
11 ( )ssT
s je
Spectrum for discrete time signal ( )x n
13 Dept. Information and Communication Eng. 13
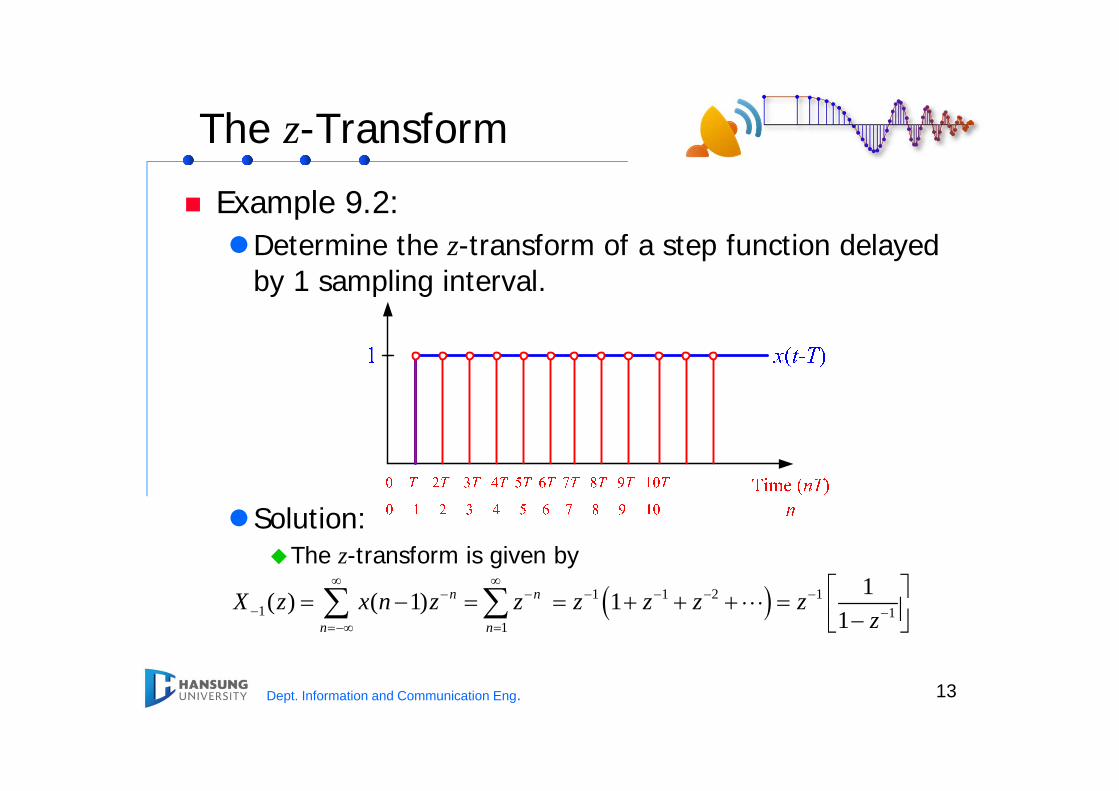
Example 9.2:Determine the z-transform of a step function delayed
by 1 sampling interval.
Solution:The z-transform is given by
The z-Transform
1 1 2 11 1
1
1( ) ( 1) 11
n n
n nX z x n z z z z z z
z

14 Dept. Information and Communication Eng. 14
The z-transform of can be written as where is the z-transform of .
The z-Transform
( 1)x n 1 ( )z X z
( )X z ( )x n
[ Block diagram of delay theorem ]
[Discrete-time system expressed in the z-domain ]
AdderAdder
Multiplier
Unit delay

15 Dept. Information and Communication Eng. 15
The general form of difference equation in LTI (causal and time-invariant) system is
If the are all zero, the systems are called 1st-order finite impulse response (FIR) systemsFIR: Each output is the sum of a finite number of
weighted samples of the input sequence
If at least one of the is nonzero, the systems are called -th order infinite impulse response (IIR) systems
The Difference Equation
mb
mbN
0 0
( ) ( ) ( )K N
m mm m
y n a x n m b y n m

16 Dept. Information and Communication Eng. 16
IIR: It is a class of feedback system, and the output is computed in terms of previously computed values of the output as well as values of the input signal
Example 9.3:Find the first five output values for the difference
equation subjected to a discrete unit step input
Solution:
The Difference Equation
( ) ( ) ( 2) 0.5 ( 1)y n x n x n y n if0 0
( )1 0
nx n
n
Use iteration table:

17 Dept. Information and Communication Eng. 17
Since the input is zero prior to n=0, the output y(n)=0 for n<0. This is causal system
Thus, the forced response is expressed as y(n)=0 if n<0, y(0)=1 and if
Example 9.4:Determine the complete response for of a
discrete-time system
for a step input x(n)=8u(n) and with initial conditions
( ) 3 0.5 ny n 1n
0n
( ) ( 1) 6 ( 2) ( )y n y n y n x n
( 1) 1, ( 2) 1y y
It is not easy to determine the general expression. We will see it later in z-transform.
The Difference Equation
18 Dept. Information and Communication Eng. 18
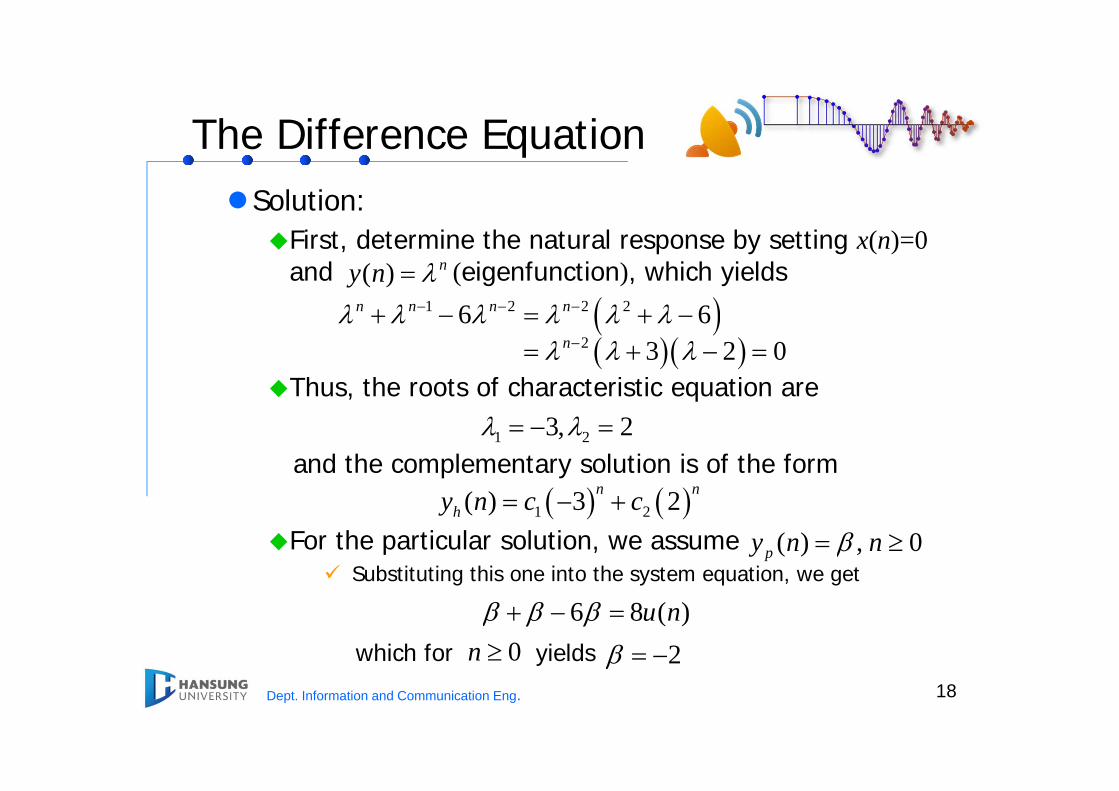
Solution:First, determine the natural response by setting x(n)=0
and (eigenfunction), which yields
Thus, the roots of characteristic equation are
and the complementary solution is of the form
For the particular solution, we assume Substituting this one into the system equation, we get
which for yields
The Difference Equation
( ) ny n
1 2 2 2
26 6
3 2 0
n n n n
n
1 23, 2
1 2( ) 3 2n nhy n c c
( ) , 0 py n n
6 8 ( )u n 0n 2

19 Dept. Information and Communication Eng. 19
Then, the nonhomogeneous solution becomes
We obtain the complete response of the system by solving for the unknown constants so that the initial conditions and are satisfied
Thus, the complete response is given by
The Difference Equation
1 2( ) ( ) ( ) 3 2 2, 0n nnh h py n y n y n c c n
2 21 2
1 11 2
( 2) 3 2 2 1,
( 1) 3 2 2 1
y c c
y c c
1 21.8, 4.8c c
( 1) 1y ( 2) 1y
( ) 1.8 3 4.8 2 2, 0n ny n n
20 Dept. Information and Communication Eng. 20
Example 9.5:Determine the complete response of a discrete-time
system with initial conditionsSolution:
The characteristic equation is given by
so that is a repeated root. The complementary solution is
Applying the initial conditions, the natural response is
The Difference Equation
(0) 1, (1) 3y y ( ) 2 ( 1) ( 2) 0y n y n y n
22 2 1 1 0,
1 2 1
1 2( ) 1 1 .n ny n c c n
( ) 1 4 1 .n ny n n

21 Dept. Information and Communication Eng. 21
The Difference Equation

22 Dept. Information and Communication Eng. 22
It is the discrete-time counterpart of the Laplace transform for continuous-time signal.
The z-transform is defined as Example 9.6:Determine the z-transform of a system
Solution:It is the sum of two systems
First of all, consider the z-transform of
( ) ( ) n
n
G z f n z
The z-Transform
( ) ( ) ( 1) n nx n u n u n
1 2( ) ( ), ( ) ( 1) n nx n u n x n u n
1( )x n
1 10
1( )1
n n
n
X z zz
( ROC is , that is )1 1 z z

23 Dept. Information and Communication Eng. 23
Next, for it is
Thus, the region of convergence for X(z)is the intersection of two regions and X(z) is
2 ( )x n1
12 1
1 0
1( )1
n n n n n n
n n n
X z z z z zz
( ROC is )1 1 z
z
1 2
1 1
( ) ( ) ( )1 1 ,
1 1
X z X z X z
z z
The z-Transform
z (ROC)
24 Dept. Information and Communication Eng. 24
A important property of z-transform:Time Shifting:
Let x(n) be a causal sequence and let X(z) denote its transform. Then, for any integer
Similarly,
0 0n
0
0
0
00
0
( )
0
1
0
0 0
1
0 0
( ) ( ) ( )
(
( )
) ( )
( )
m nn
m n
nn m m
m
m
m
nmn
n
Z x n n x n n z x m z
z x m z x m
z
z
X mz xz
0
0
1
0( ) ( ) ( )
n m
m n
Z x n n z X z x m z
Can be called initial conditions !
The z-Transform

25 Dept. Information and Communication Eng. 25
z-transform Properties:
The z-Transform

26 Dept. Information and Communication Eng. 26
Example 9.7:Find the complete response of system with zero initial
conditions
Solution:Taking z-transform of both sides gives
1( ) ( ) ( 2) ( 1)2
y n x n x n y n if0 0
( )1 0
nx n
n
2 2
1( ) ( ) ( ) ( 2) ( 1)
0.5 ( ) ( 1)
Y z X z z X z x z x zz Y z y z
The z-Transform

27 Dept. Information and Communication Eng. 27
Setting all the initial conditions to zero and substituting , we have
Using the inverse z-transform and the time-shift theorem, it becomes
1 3 / 22( 1) 3( ) 1 12 1 2 1 1/ 2
zzY z zz z z
3 1 ( )2 2
n
u n
13 1( ) ( ) ( 1)2 2
n
y n n u n
The z-Transform
( ) /( 1) X z z z

28 Dept. Information and Communication Eng. 28
Example 9.8:Find the complete response of the system
for y(n), , if x(n)=u(n), y(1)=1 and y(0)=1Solution:
Applying the property of time-shifting, we have
Substituting and using the given initial conditions, we get
2( 2) ( 1) ( ) ( )9
y n y n y n x n
0n
2 1 2( ) (0) (1) ( ) (0) ( ) ( )9
z Y z y y z z Y z y Y z X z
( ) / 1 X z z z
The z-Transform

29 Dept. Information and Communication Eng. 29
Expanding the fractional term in partial fractions yields
Consequently, the complete response is given by
The z-Transform
2
2 2
2
(0) (1)( )( )2 29 9
1 (1/ 3) (2 / 3) (1/ 3) (2 / 3)
z z y zyX zY zz z z z
z zz z z z z
Forced response Natural response
(9 / 2) (7 / 2) 7( )1 (1/ 3) (2 / 3)
z z zY zz z z
9 7 1 2( ) 7 ( )2 2 3 3
n n
y n u n

30 Dept. Information and Communication Eng. 30
Example 9.9:Find the transfer function of the system shown in
Figure.Solution:
The z-Transform

31 Dept. Information and Communication Eng. 31
From the block diagram, we have
Substituting and into yields
Thus, the transfer function is given by
The z-Transform
1( 1)w n 2 ( 2)w n ( )y n
0 1 1 2 2( ) ( ) ( 1) ( 1) ( 2) ( 2)y n b x n b x n a y n b x n a y n
1 2 20 1 2 0 1 2
1 2 21 2 1 2
( )1b b z b z b z b z bH z
a z a z z a z a
0 1
1 1 1 2
2 2 2
( ) ( ) ( 1),( ) ( ) ( ) ( 1),( ) ( ) ( ).
y n b x n w nw n b x n a y n w nw n b x n a y n
1 1 1 2
2 2 2
( 1) ( 1) ( 1) ( 2),( 2) ( 2) ( 2).
w n b x n a y n w nw n b x n a y n
32 Dept. Information and Communication Eng. 32
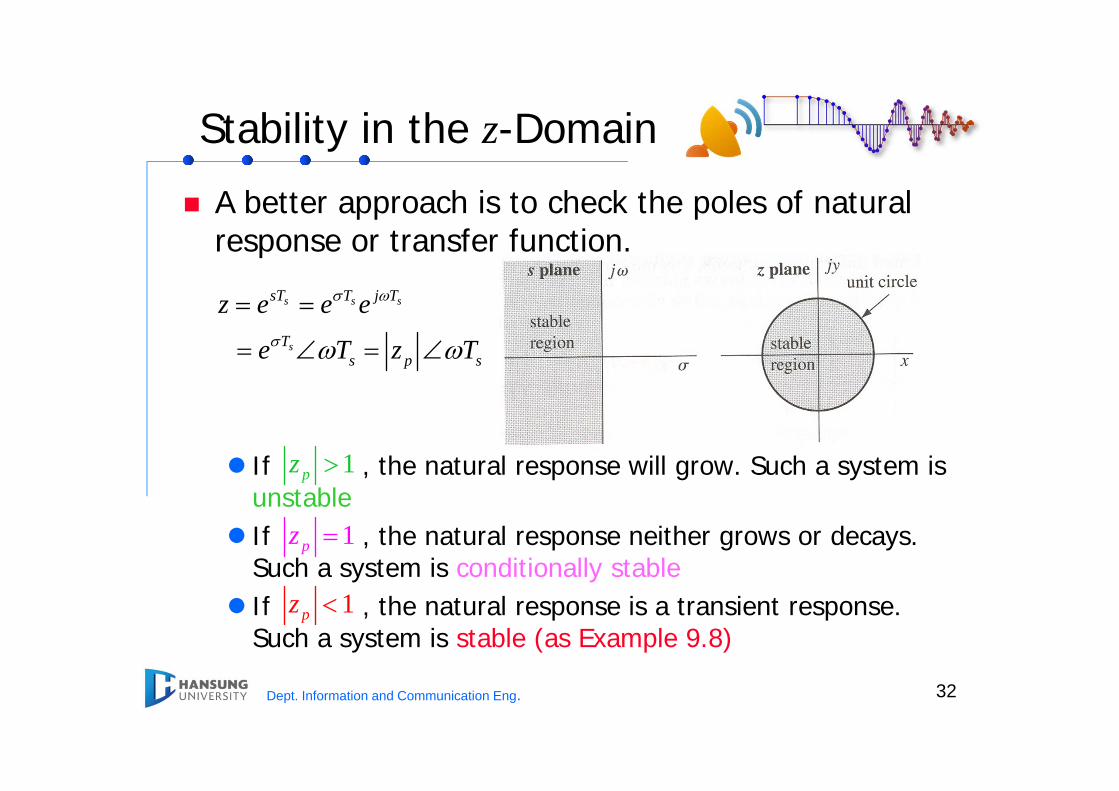
A better approach is to check the poles of natural response or transfer function.
If , the natural response will grow. Such a system is unstable
If , the natural response neither grows or decays. Such a system is conditionally stable
If , the natural response is a transient response. Such a system is stable (as Example 9.8)
Stability in the z-Domain
s s s
s
sT T j T
Ts p s
z e e e
e T z T
1pz
1pz
1pz

33 Dept. Information and Communication Eng. 33
Problem 9.1:Find the transfer function represented by the
following difference equations(a)(b)
Problem 9.2:Determine the difference equation for each of the
following systems
(a) (b)
Homework Assignments
( ) ( ) ( 1) 0.75 ( 1) 0.5 ( 3)y n x n x n y n y n
( ) 0.25 ( ) 0.5 ( 1) ( 2) 0.5 ( 3) 0.25 ( 4)y n x n x n x n x n y n
4 3 2
4
4 2 1( ) z z z zH zz
4
4
1( )0.5
zH zz
34 Dept. Information and Communication Eng. 34
Problem 9.3:Determine the natural response of a system whose
difference equation is
Problem 9.4:Using Matlab, plot the output given that
is passed through a filter with a transfer function of
Homework Assignments
3( ) ( ) 2 ( 2) ( 1) ( 2)4
y n x n x n y n y n
( )y n( ) sin(0.05 )x n n
2 1( )
0.5zH z
z z
35 Dept. Information and Communication Eng. 35
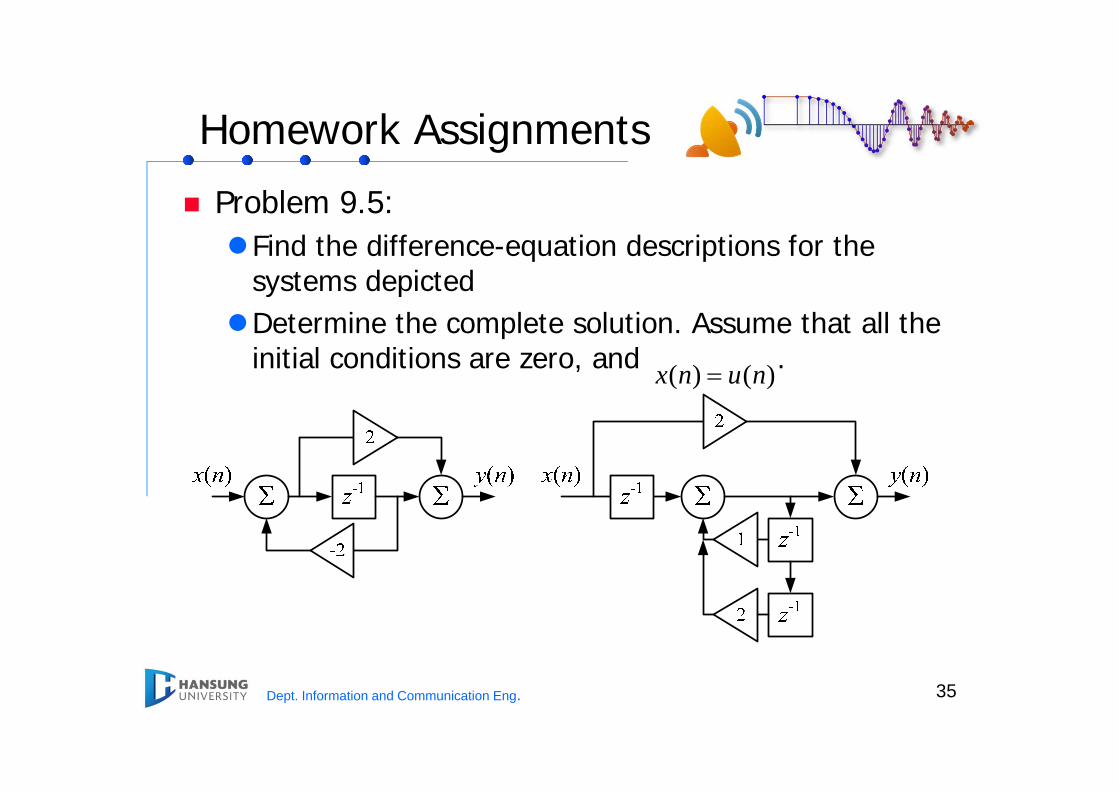
Problem 9.5:Find the difference-equation descriptions for the
systems depictedDetermine the complete solution. Assume that all the
initial conditions are zero, and .
Homework Assignments
( ) ( )x n u n