school of something faculty of other 1 reasoning about visual scenes david hogg university of leeds
TRANSCRIPT

1
School of somethingFACULTY OF OTHER
Reasoning about visual scenes
David Hogg
University of Leeds

2
Introduction
What happened in this video?
• Has the bag been abandoned?
• Who abandoned the bag?
• Is the bag being stolen or collected by its owner?
Often difficult to answer because:
1. visual data is ambiguous;
2. behaviour driven by human intentions;
3. many possible explanations (e.g. the owner has gone to buy a newspaper, the bag has been left with a friend).
From PETS 2006 dataset

3
School of somethingFACULTY OF OTHER
1. Visual ambiguity in tracking and activity analysis

4
Dealing with visual ambiguity
Object trackers must deal with detection errors
• failure to detect an object in one or more frames
• false alarms
Long history from radar literature and elsewhere:Ingemar Cox, A Review of Statistical Data Association Techniques for Motion Correspondence, International Journal of Computer Vision, vol. 10, pp. 53-66, 1993.

5
General problem statementbased on Oh, Russell, and Sastry, CDC-04, 2004
Seek the MAP solution
Given a set of noisy observations arising from a collection of objects.
A solution is a partition of these observationswhere each subset (part) corresponds to a track and contains all spurious observations (false alarms)
0 1{ , , }K
Y
0
))|((argmax Yp
From Oh et al., CDC-04

6
Defining
ii
ii
tt
tt
Cxy
Axx1
kttt ,,, 21
Assumptions:
(1) each track behaves as a stochastic linear system:
where the object is observed at times
itx
1itx
ity
1ity
(note that matrix A and noise term scaled according to the width of interval
)|( Yp

7
(2) New objects arise independently of one another with average rate per unit interval. Thus, the probability there are k new objects in a unit interval is given by the Poisson distribution:
!)(
k
ekP
kb
b
b
(4) At each time-step an object disappears with probability and is detected with probability
(3) False alarms occur with average rate per unit interval.f
dpzp

8
For a given at time-step t, assume:
objects persist from t-1
new objects appear
objects disappear
objects detected
false alarms
objects undetected
tetatz
1t t
T
t itti
t
ff
t
abu
ddd
zez
zZ ii
tt
ttttt BxCtfa
ppppZ
YP1 }\{
1
11
0
11))(),(|)((Ν
!!)1()1(
1)|(
track terminations
missing observations stochastic linear system
new objects and false alarms
t
t
t
t
t
f
d
z
a
e
ttttt dazeu

9
Limit the number of possible associations
distance sMahalanobi
Validation region eliminates low-probability associations

10
Integer ProgrammingMorefield, IEEE-TAC 1977
• Create a large set of feasible tracks F (a covering), many of which will be inconsistent with one another.
• Seek the optimal partition from a subset of these tracks + false alarms
))|((argmax YpF

11
Converting to a standard integer programming problem
1
1
1
1
0
1
100
110
011
A
FY
cminimise
subject to 1A Ensures each data point used at most once
Sums the ‘cost’ of selected tracks
Requires clever construction of c to incorporate prior terms (e.g. on false alarms) into the costs of the selected tracks
a binary vector denoting whether each track in F is in or out.
c
a vector of the cost of each track in F
Example

12
from http://www.vision.ee.ethz.ch/~bleibe/index.html
Uses a trained pedestrian detector operating on each frame
Examplefrom Leibe, Schindler, and Van Gool, ICCV 2007

13
Multiple-Hypothesis Tree (MHT)Reid, IEEE-TAC 1979
• Iteratively extend partial tracks at each time-step
• Pursue multiple hypotheses where there is ambiguity
• Prune unlikely hypotheses to keep search tractable
k=1

14
k=1
k=2

1515/46
1 1 0 1
1 1 1 1
1 0 1 1
k=1k=2k=3
Currenttracks
Newtracks
Falsealarms
1z
2z
3z
Extend hypothesis tree with all combinations, such that one per row and one per ‘track’ column

16
Pruning
To be tractable, prune tree N-steps back to exclude all but the sub-tree with the maximum sum of posterior probabilities at its leaves
N-scan back for N=2
Decision node

17
Joint Probabilistic Data-Association Filter (JPDAF)
On-line recursive algorithm for a fixed number of tracks
For each track, compute a weighted mean of the innovations for all observations.
Weighting is posterior probability of association, obtained from all assignments in which it appears.

18
Markov Chain Monte Carlo Data AssociationOh, Russell, and Sastry, CDC-04, 2004
• Draw samples from posterior and select the maximum. Use Markov Chain Monte Carlo (MCMC) to do this efficiently.
Space of all partitions
( | )p Y
initialise
repeat many times
Choose w’ from neighbours of w according to the proposal distribution
(neighbours are obtained from w by simple edits, e.g. merge two tracks, split, add or remove a single track)
Replace w by w’ with (acceptance) probability:
end
),( q
),()|(
),()|(,1min),(
qYp
qYpA
Assume a uniform proposal distribution – i.e. each edit is equally probable.

19From Oh, Russel and Sastry, CDC-04, 2004
MCMC moves

20
Additional problems
2. Confounding more than one object in a single detection
1. Multiple detections of a single object during the same time-step. Could arise through:
multiple sensors
separate detections for multiple parts of an object
Generalise problem formulation to allow multiple detections at a time-step within a single track.

21
A different kind of example: linking drops and picks
Damen & Hogg, BMVC 2007
Task: Linking people dropping-off and picking-up bikes

22
Visual ambiguity
Did each person drop, pick or pass-through?

23
Visual analysis is ambiguous
person 1
person 2
person 3
person 4
person 5
person 6
bike 1
bike 2

24
Method
• Track people entering the rack area
• Detect new clusters of dropped & picked bikes each time the rack area becomes empty
• List the possible new drop, pick and pass-through events, assuming people entering the rack, drop or pick no more than one bike
• Find optimal set of linked drop and pick events

25
Interpretations
Drop
Pick
Drop-Pick

26
Defining
Posterior based on
• proximity of people to bike clusters
• area difference of person blob before and after event
• intersection of cluster masks between drop and pick events (note: this also refines location of bike for proximity estimation)
• Prior probability for drop or pick falling outside observation period
• Prior probability for pass-through and drop-pick event given someone enters the rack area
)|( Yp

27
Linking drops and picks using MHT
Assignments set 1:drop(person1, bike)None (person2)None (person3)
3 nbikes 0
7 possible interpretations

2828/46
Example
Person1 – Bicycle1
Person2 – Bicycle 2
Person3 –Bicycle 2 – Person2 Person3 – Bicycle 1 – Person1
Person5 – Bicycle2 – Person2Person5 – Bicycle1 – Person1

29
Experiments & Results
3 experiments
• 1 hour (45 events)
• 50 minutes (22 events)
• 9.5 hours (working day) (40 events)
% of correct connections
Exp # Unconstrained Constrained
1 75.86 93.10
2 70.37 92.59
3 83.59 96.09

30
Application to bicycle theft detection
Compare colour profile of associated individuals

31
Performance
• 11 hours, 213 cases
• 13 (simulated) thefts
True positive detection
Predicted
Actual Thief Non-Thief
Thief 10 3Non-Thief
17 183

32
False alarm

33
School of somethingFACULTY OF OTHER
2. Behaviour as plan execution

34
Review of stochastic processes
2-D Position 2-D Position and shape
Let the instantaneous configuration of an object be represented by
1 2{ , , }na a ax Then, the motion of an object over time can be represented by a sequence of configurations ),( 21 txxx We can define a probability function over such sequences ),,( 21 tp xxx This probability function defines a stochastic process

35
1x 2x 3x 1tx tx
),|(),|()|()(),,( 12121312121 ttt ppppp xxxxxxxxxxxxx
Factorisation of joint distribution
Represent as a dynamic Bayesian network

36
)|()|()|()(),,( 12312121 ttt ppppp xxxxxxxxxx
1x 2x 3x
Reduce to a tractable form by simplifying individual terms
This is known as a 1st Order Markov process
Simplification
By convention, show one ‘cycle’ only and omit the variables

37
A Markov model for the paths of pedestrians
Configuration is position and velocity in the image plane:
Given lots of video of a particular scene, track the objects and cluster the observed configurations into prototypes using k-means. Then encode configurations using these prototypes.
Build a Markov model by setting transition probabilities according to the actual transitions observed in the data
( , , , )x y x y
Object paths
Prototypes

38
Example of a similar model: learning motion trajectories
common uncommon
Detecting atypical trajectories Trajectory prediction

39
)|()|()|()(),( 12
11111 ttt
n
ttnn spsspspspssp xxxx
Hidden Markov models (HMMs)
observations
hidden class or ‘state’
A sequence of Gaussian mixtures with state dependency over time
sequencesstateallss
ttt
n
ttn
n
spsspspspp)(
12
1111
1
)|()|()|()()(
xxxx

40
Example: learning an HMM for interactive behaviour
Source video
),( rightt
lefttt xxx
tx1tx
1ts tsAn HMM with configuration of bothfaces obtained from tracking as observations

41
• 20 states• trained and tested on the same data - demonstrates compression

42
Dealing with complexity:learning behavioural motion patterns
Boiman & Irani, ICCV 2005(reproduced with permission)
common uncommon
Johnson & Hogg, IVC 1996
Application to anomaly detection

43
Dealing with complexity: behaviour as plan execution
Human activity results from executing goal-directed plans
People can’t help perceiving motion in this way
Heider & Simmel, 1944

44
Long history of work in AI on planning:
• Hierarchical planning
• Handling uncertainty
• non-deterministic plan decomposition into sub-plans
• non-determinism in outcomes from different actions
• uncertainty in the observation of these outcomes
• Plan recognition by probabilistic inference over the stochastic process modelling execution of an actor’s plans
General model for probabilistic hierarchical planning
• Abstract Markov policies (AMP), Sutton, Precup and Singh, 1999
• Abstract Hidden Markov Models (AHMM), Bui, Venkatesh and West JAIR 2002

45
Abstract Hidden Markov ModelsBui, Venkatesh and West, JAIR 2002
Possible states of the world S
Possible actions A
In state s, action a results in state s’ with probability
‘Local’ policy
),( ssa
),,,( DS
applicable states
destination states
probability of stopping foreach destination state
probability of performingaction a in state s
]1,0[: AS

46
Abstract policy over a set of abstract policies),,,( *****
DS
Like a local policy, except actions replaced by policies from
]1,0[: ** S
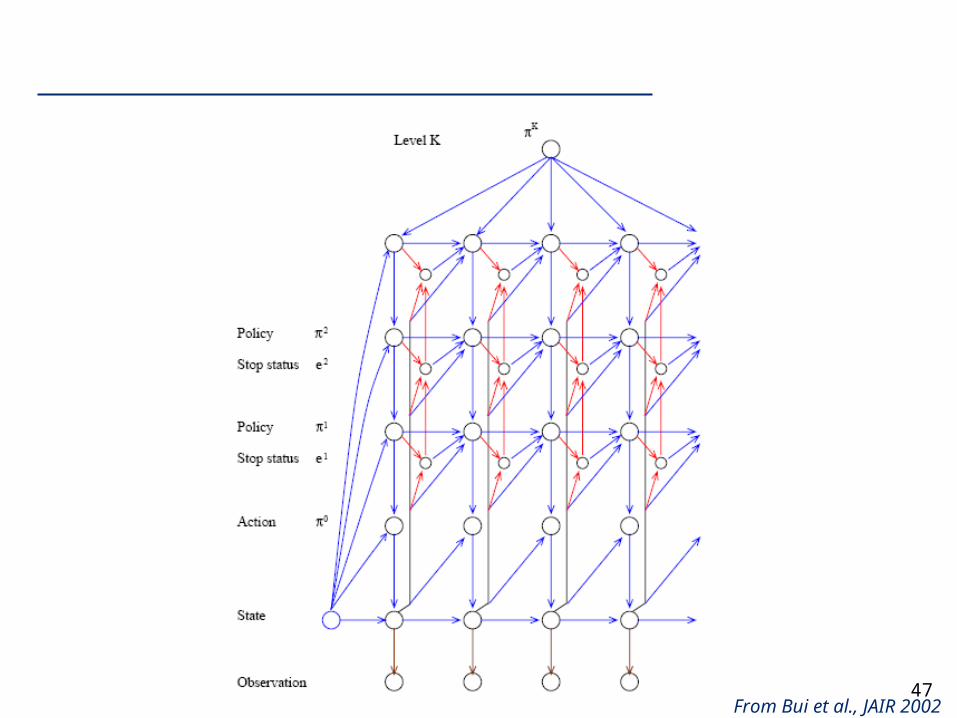
47From Bui et al., JAIR 2002

48
An example
From Bui et al., JAIR 2002
6 cameras
Floor divided into a grid of cells (state)

49From Bui et al., JAIR 2002
Region (state space) and policy hierarchy
2 policies: ‘using’, ‘passing through’

50
Plan execution for transportationLiao, Patterson, Fox, and Kautz, AIJ 2007
From Liao et al., AIJ, 2007
goals
trip switching locations

51
From Liao et al., AIJ, 2007
Observations from GPS

52
Represent streets and junctions with a directed graph G=(V,E)
e
d
Person location given by road segment (edge e) and distance from junction d
locationcar
ocityperson vel
locationperson
),,(
k
k
k
kkkk
c
v
l
cvlx

53
GPS observation
Sensor model: given by a Gaussian density function
Motion model: given by a Kalman filter
)|( kk lzp
),,|( 1 kkkk vllp

54
Transportation mode: BUS, FOOT, CAR, BUILDING
- determines Gaussian velocity distribution of person
- only changes in CAR mode
Trip segment: (start location, end location, transportation mode)
- determines transition probabilities at junctions (nodes)
kc
0.7
0.3
0.20.8

55
Goals, e.g. friend’s home, workplace, grocery store
- determines transition probabilities at end of trip segments
Goal sequence determined by transition probabilities:
g1 g2 g3
g1 0 0.2 0.8
g2 0.6 0 0.4
g3 0.1 0.9 0
Currentgoal
New goal
Novelty is TRUE or FALSE: when true ignore goal and trip segment levels

56
Policy (goal) recognition using probabilistic inference over the Bayesian network (Rao-Blackwellized filter)
Experiment
• 60 days of GPS from one person
• 30 days used for learning parameters of the model (e.g. transition probabilities for goal segments and trip segments)
• 30 days for testing

57
Plan execution using generic strategies
Problems with plan execution over a fixed network:
• unfamiliar scenes
• changes in scene layout
• rare events
Is there an approach involving more general planning strategies?

58
Anomaly detection via plan recognition
Ranking of path planning strategies (Golledge, 1995)1. Shortest distance2. Least time3. Fewest turns4. Most scenic/aesthetic5. First noticed6. Longest leg first7. Many curves8. Many turns9. Different from previous (novelty)10. Shortest leg first
Hannah Dee, VS 2006
A person’s path is anomalous if not explainable as the execution of a goal-directed plan: following the shortest route to a known exit

59
Method
Learning phase
• Locate obstacles by hand (e.g. hedges, buildings)
• Track cars/people and locate ‘exits’ (e.g. doorways, stationary cars)
Monitoring phase
• Track cars/people and for each:
• generate shortest paths from entry-point towards all known exits
• score explicability of actual path by comparison to the closest of these

60
Results
Compare with the performance of people doing a similar task
• “If you were a security guard, would you regard the behaviour of the agent highlighted in this video as interesting? Please indicate on the following questionnaire, with 1 being uninteresting and 5 being interesting”
Car park dataset, with 269 people/car movements
High rank correlation (0.0001 significance) between automatic explicability scores and the mean human interest scores

61
School of somethingFACULTY OF OTHER
3. Learning about objects and activities

62
Introduction
Learning to play simple table-top games
• visual objects
• spoken utterances
• ‘rules’ of play
Assume the game can be characterised as a sequence of situation-action events associated with a quiescent table-top
Needham et al., AI Journal, 2006 (EU-IST project CogVis)

63
Overview
Segmentation
Audio-videostream
Category formation
Objects/sounds sequence
Object/soundcategories
Classification Rule induction
Situation-actionsequence
Rules
Rule invocationActionsequence
Situationsequence

64
Segmentation and category formation
Visual
• generic blob tracker (Magee, 2003)
• segment quiescent states of the table-top
• cluster colour, texture and position to obtain blob attribute categories
Acoustic
• segment into utterances by thresholding energy
• associate with the nearest visually-quiescent state
• cluster sound spectra (17 spectral bands x 3 time-frames) to obtain sound categories

65
A situation-action sequence for GSnap
state([[tex2,col2,pos0],[tex2,col1,pos1]],t521).action(utt1,t521).time(t521).successor(t518,t521).

66
Learning situation-action rules
Use logical induction to find simple clauses H which, when combined with ‘state’ and ‘successor’ atoms B, entail most of the ‘action’ atoms E:
Restrict H to clauses relating to current and previous qualitative states (plays).
Implemented using Progol (Muggleton 1995): B,H,E are Prolog programs; induction by inverse entailment. Essentially an A*-style search for H maximising: # (positive) examples correctly deduced - length of clause (- …)
EHB | (E true whenever B and H are true)

67
action(utt4,t65).action(utt5,t198).action(utt1,t237).action(utt6,A) :- state([[B,C,D],[B,C,E]],A).action(utt10,A) :- state([[B,C,D],[E,C,F]],A).action(utt1,A) :- state([[B,C,D],[B,E,F],A).action(utt4,A) :- state([B,C,D],[E,F,G]],A).action(utt9,A) :- state([],A]).action(utt8,A) :- state([],A]).action(utt2,A) :- state([],A]).action(utt3,A) :- state([],A]).action(utt7,A) :- successor(B,A), state([[C,D,E],[F,G,H]],B).
‘play’ rule
‘same’ rule‘colour’ rule‘shape’ rule‘nothing’ rule
From noise in the data
From situations without a consistent explanation (noise)
Typical rules learnt for GSnap
Key“same” = utt6 “colour” = utt10“shape” = utt1 “nothing” = utt4“play” = utt2, utt3, utt5, utt7, utt8, utt9

68
Inferring semantically equivalent sounds
action(utt3,A) :- state([[tex0,B,pos0],[tex1,C,pos1]]).action(utt7,A) :- state([[tex0,B,pos0],[tex1,C,pos1]]).action(utt7,A) :- state([[tex1,B,pos0],[tex2,C,pos1]]).action(utt9,A) :- state([[tex1,B,pos0],[tex2,C,pos1]]).
By transitive closure get the equivalence class {utt3,utt7,utt9}
action(utt9,A) :- state([],A]).action(utt8,A) :- state([],A]).action(utt2,A) :- state([],A]).action(utt3,A) :- state([],A]).
From common right-hand side, infer equivalence class of sounds {utt2,utt3,utt8,utt9}
utt3 ~ utt7
utt7 ~ utt9

69
Playing ‘paper, scissors, stone’